Składowe przedmiotu MECHANIKA I MECHATRONIKA. mechanika techniczna podstawy konstrukcji maszyn mechatronika
|
|
|
- Maksymilian Maciejewski
- 8 lat temu
- Przeglądów:
Transkrypt
1 Składowe pzedmiotu MECHANIKA I MECHATRONIKA mechanika techniczna podstawy konstukcji maszyn mechatonika
2 mechanika techniczna mechanika ogólna (teoetyczna): kinematyka (badanie uchu bez wnikania w jego pzyczyny, bez uwzględniania działających sił) dynamika (badanie działających sił): statyka (badanie ównowagi sił) kinetyka (badanie uchu ciał oaz sił wywołujących ten uch) wytzymałość mateiałów
3 Kinematyka Kinematyka - badanie uchu bez wnikania w jego pzyczyny, bez uwzględniania działających sił.
4 Jak to się wszystko zaczęł ęło... Heaklit z Efezu (około oku p.n.e)- panta ei (wszystko płynie). Istotną tudność spawiało antycznym myślicielom powiązanie pojęcia położenia z pojęciem uchu. Zenon z Elei (około oku p.n.e) - cztey paadoksy, czyli pozone spzeczności w opisie uchu. Paadoks żółwia i Achillesa. Achilles, nigdy nie dogoni żółwia, jeśli żółw nieco wcześniej ozpocznie wyścig. Gdy Achilles dobiegnie do miejsca, z któego wystatował żółw, żółwia już tam nie będzie, bo pzesunął się w tym czasie w inne miejsce. Achilles musi znów dobiec w miejsce, gdzie żółw był pzed chwilą, ale ten pzesunął się już do pzodu. Taka sytuacja będzie się ciągle powtazać. Goniącego i uciekającego zawsze będzie dzielić jakaś odległość. Najszybszy biegacz nigdy nie dogoni najwolniejszego.
5 Aystoteles ze Stagiy ( ok p.n.e) podzielił uchy na natualne i wymuszone. Natualne - uch ciał niebieskich oaz uchy, dzięki któym ciała uzyskiwały swoje natualne położenie. Dla ciał ciężkich natualnym położeniem jest ziemia, więc spadają na nią, ciała lekkie takie jak dym z ogniska czy paa wodna, unoszą się w góę, bo tam jest ich natualne miejsce. Poglądy te uważano za słuszne pzez pawie 2 tysiące lat, aż do XVII wieku, do czasów Galileusza, któy wykazał, jak Aystoteles się mylił. Galileusz ( ) - sfomułował zasady względności uchu, popawny opis swobodnego spadania ciał, udowodnił, że toem uchu pocisku jest paabola.

6 Wykozystanie zasad kinematyki Odległość w km


7
8
9

10


11
12

13
14
15 Pojęcia podstawowe Obiekty mateialne: wyidealizowane schematy ciał zeczywistych. Wyóżnia się: punkt mateialny, układ punktów mateialnych, ciało sztywne. Ruch - zjawisko zmiany położenia ciała względem innego ciała uznanego umownie za nieuchome. Nieuchome ciało nazywa się ciałem odniesienia. Wniosek: uch jest względny tzn. zależy od wybou ciała odniesienia.
16 Czas -pojęcie piewotne i absolutne w mechanice klasycznej (Newtona). Czas nie zależy od wybou układu odniesienia i jest taki sam w każdym punkcie pzestzeni. Pzyjmuje się, że czas jest stale nieujemny t 0 i występuje tylko wtedy gdy występuje uch. Układ odniesienia -układ współzędnych sztywno związany z ciałem ozpatywanym, któy służy do opisu uchu obiektu (- ów).
17 UKŁAD ODNIESIENIA z ciało odniesienia (nieuchome) V Obiekt uchomy względem Oxyz O y x Oxyz układ odniesienia, postokątny pawoskętny układ współzędnych
18 Kinematyka punktu w układzie Oxyz Kinematyka - dział mechaniki, w któym bada się uch obiektów bez wnikania w pzyczyny wywołujące ten uch. Można ją nazwać geometią uchu, bowiem do opisu tego uchu stosujemy pojęcia pzestzeni i czasu.
19 Wielkości fizyczne w kinematyce 1. Doga, pzesunięcie, pzemieszczenie - [tanslacja - m, obót - ad ]. 2. Pędkość - [m/s, ad/s]. 3. Pzyspieszenie - [m/s 2, ad/s 2 ]. 4. To uchu punktu - ównanie kzywej, po któej następuje uch tego punktu, np.: y y(x) y 3x 2 6x + 5




20 Pzegląd podstawowych ozmiaów Odległość Ziemia-Słońce: m Odległość Ziemia-Księżyc: m Długość muu chińskiego: m Wysokość Mt. Eveestu: 8 848m Wzost człowieka: ~1.8m Gubość włosa ludzkiego: m Rozmia cząsteczki H 2 O : m Rozmia atomu: m














21 Pzegląd podstawowych ozmiaów Obita Nasza Układ Akceleato nasza LEP Jezioo Księżyca Doga Doga Galaktyka z Ziemi obłokiem Słoneczny CERN Magellana 9325 Galaktyka w Ziemi 4 Galaktyk dniach w Genewskie Metów Metów tygodniach Metów Metów Metów Metów Mete Metów Metów Metów Metów Metów Metów Metów











22 Pzegląd podstawowych ozmiaów Met Meta Meta Meta Meta Meta 01 Meta Molekuła Jądo Oko Atom Facetten Włosek Muchy Atomowe Węgla DNS Poton z Kwakami
23 Opis uchu punktu Matematycznie uch punktu opisujemy w postaci wektoowej lub skalanej. Opisy te są ównoważne. Równanie wektoowe uchu: (t ) Równania skalane w układzie Oxyz: xx(t), yy(t), zz(t)
24 Pędkość śednia Rozważmy osobę obsewującą lot ptaka i znajdująca się w początku pewnego układu współzędnych. Δ W czasie Δt t f t i ptak pzemieścił się o Δ f i. i, t i f, t f Śednią pędkością nazywamy wekto zdefiniowany następująco: Kieunek tej pędkości jest zgodny z kieunkiem wektoa Δ. v ś Δ Δt
25 Rozważmy ównież jaka będzie pędkość pływaka w basenie, któy płynie tam i z powotem. t i i t f f Śednia pędkość dla pływaka jest ówna zeo, wynika to z wektoowego chaakteu pędkości śedniej. W takich pzypadkach podaje się jako pędkość śednią watość skalaną. v ś odległość czas
26 Pędkość punktu w Oxyz z A(t) Δ Δ s A(t+Δt) v lim Δ t 0 Δ Δt d dt & x 0 (t+δt) to y A(t) v(t) v τ τ A(t+ Δ t) to τ - styczna do tou w punkcie A(t)
27 Moduł wektoa pędkości jest watością pędkości. NIE MYLIĆ pojęć wektoa pędkości i jej watości! Wekto pędkości: v [ v x, v y, v z ] pzy czym v x x&, v y&, v y z z& Watość pędkości (długość wektoa): v v v + v + 2 x 2 y v 2 z
28 Elementana doga po toze: ds v 2 x + v 2 y + v 2 z dt Jeśli znamy ss(t) to pędkość możemy obliczyć z zależności: v ds d t s&
29 Pzyspieszenie punktu w Oxyz a 2 dv d ; lub dt 2 dt a & v &
30 Moduł pzyspieszenia (długość wektoa pzyspieszenia): Wekto pzyspieszenia i jego współzędne: ; ; ; z v a y v a x v a z z y y x x && & && & && & ) ( d d v v v t a z y x z y x a a a a a + +
31 z A v τ x 0 (t) a v y τ () a τ! Uwaga: wekto pzyspieszenia ma na ogół inny kieunek niż wekto pędkości.
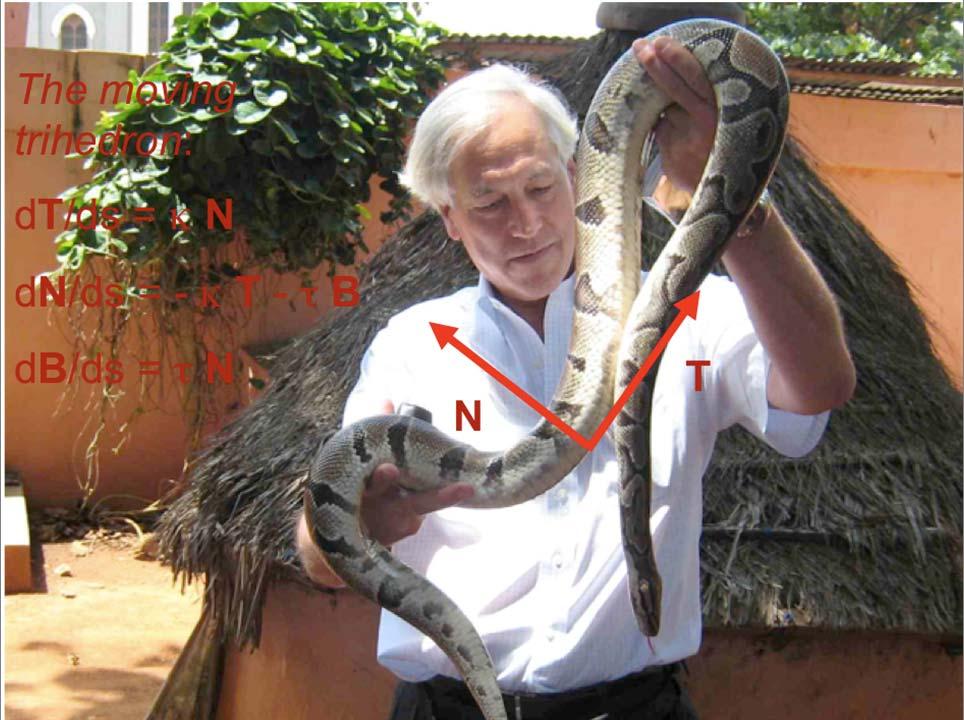
32 Kinematyka punktu w układzie natualnym Założenia: Ruch punktu jest dany w postaci: (s); gdzie s s(t) Początek układu współzędnych jest związany z uchomym punktem A na toze. Układ taki nazywamy natualnym lub tójścianem Feneta.
33 W ozpatywanym pzypadku kinematyki punktu, jego to był kzywą płaską (a więc leżał w jednej płaszczyźnie). Jego natualnymi kieunkami są styczna i nomalna. Układ natualny jest układem uchomym, pzemieszczającym się waz z ozpatywanym punktem wzdłuż kzywej, będącej toem tego punktu.
34 W pzypadku kzywej pzestzennej kieunkami natualnymi są kawędzie tójścianu Feneta. Tójścian Féneta, pojęcie z zakesu geometii óżniczkowej - dla danej kzywej okeślonej ównaniem (t), tójścian Féneta w punkcie p wyznaczają tzy wektoy: s '(t) (wekto stycznej), n ''(t) (wekto nomalnej głównej), b s'n (wekto binomalnej).
35 (b) Tójścian Feneta (τ) z τ A (s) b n π A τ n b układ natualny τ, n, b zależą od czasu. x O to y (n) Wektoy τ in wyznaczają płaszczyznę ściśle styczną do tou π
36 Pędkość punktu w układzie natualnym (b) (τ) v d ( s) dt d ds ds dt v d ds v τ v A (n) π v ds dt d ; τ ; v τ ds
37 pzyspieszenie nomalne; pzyspieszenie styczne; d d d d d d d d ) ( d d d d 2 n v a t v a t s s v t v v t t v a n ρ τ τ τ + τ τ Pzyspieszenie punktu w układzie natualnym ρ - pomień kzywizny tou w punkcie A
38 Ruch postoliniowy Jeżeli to uchu ciała jest linią postą, to zawsze możemy tak dobać układ współzędnych, aby jedna z jego osi pokywała się z toem. Zwykle wybiea się oś x. x ( t) x( t)
39 Pędkość ciała i jego pzyśpieszenie wynoszą odpowiednio: v( t) a( t) dx dt 2 d x 2 dt dv dt Jeśli wektoy pzyśpieszenia i pędkości mają zwoty zgodne, mówimy o uchu pzyśpieszonym, a jeśli pzeciwny mówimy o uchu opóźnionym. Skalana watość pędkości (szybkość) jest ówna dx v dx dt v dt
40 Ruch jednostajny Ruch jednostajny, jest to taki uch, w któym: pzyspieszenie a 0; pędkość v const. s x 0 xx 0 + v(t-t 0 ) t 0 t położenie pędkość pzyspieszenie
41 położenie czas
42 Ruch jednostajnie zmienny Ruch jednostajnie zmienny jest to uch ze stałym pzyśpieszeniem a const. Gdy a > 0 uch nazywamy pzyśpieszonym. położenie pędkość pzyspieszenie
43 Gdy a < 0 uch nazywamy opóźnionym. położenie pędkość pzyspieszenie
44 Ruch po okęgu Ruch po okęgu jest szczególnym pzypadkiem płaskiego uchu kzywoliniowego. Początek układu współzędnych wybieamy w śodku koła, po któym odbywa się uch. Położenie punktu na na kole możemy podać jednoznacznie pzez podanie kąta biegunowego ϕ. y ϕ s x Ruch ciała okeślony jest pzez funkcję ϕ ϕ(t), definiująca tzw. dogę kątową. Jeśli pzez s oznaczymy dogę, któą ciało pzebyło po okęgu w czasie gdy pzebyło ono dogę kątową ϕ, to s ϕ
45 Różniczkując to ównanie obustonnie, otzymujemy: s ϕ ds dt dϕ dt v ω v oznacza pędkość liniową(tanswesalną), a ω pędkość kątową. Jednostką pędkości kątowej jest s -1. Jeżeli pędkość kątowa ωconst uch po okęgu nazywamy jednostajnym.
46 Pędkość kątową możemy taktować jako wekto ω skieowany postopadle do płaszczyzny zataczanego okęgu. Zwot tego wektoa jest dany pzez egułę śuby pawej tak, że zachodzi związek: z v ω x ω v y Pochodną po czasie pędkości kątowej jest pzyśpieszeniem kątowym α. ε dω dt
47 Zdefiniujmy sobie jeszcze uch jednostajny po okęgu. Dla takiego uchu: ω const, ε 0 Podczas uchu zmienia się kieunek pędkości, ale watość pędkości pozostaje stała. Okesem uchu po okęgu w uchu jednostajnym nazywamy czas potzebny na pzebycie dogi ϕ 2π. ω 2π T Odwotność okesu nazywamy częstością: ν 1 ω 2πν T


48 Ruch hamoniczny Ruch hamoniczny jest szczególnym pzykładem uchów peiodycznych. Są nimi pzykładowo: pzypływy i odpływy, cykliczne powtazanie się nocy i dnia. Rozważmy animację pzedstawiającą uch punktu po okęgu i zut tego uchu na jedną z osi. ϕ : pzemieszczenie kątowe ω : pędkość kątowa t : czas ϕ ωt : pomień koła, amplituda y(t) sin(α) sin(ωt)
49 W podobny sposób można ozważać zut punktu pouszającego się po okęgu na oś x. Można ównież powiedzieć, że uch po okęgu jest złożeniem dwóch postoliniowych uchów w kieunku osi x i osi y. y x y cosϕ sinϕ ϕ x Wiemy, że ω ϕ/t, czyli ϕ ωt. x cosω t y sinω t Widać więc, że: 2 2 x + y 2

50 Każdy z tych dwóch uchów, czyli w kieunku x i w kieunku y nazywamy dganiem hamonicznym. W piewszym pzybliżeniu można powiedzieć, że uchy następujących ciał są ównież uchami hamonicznymi.
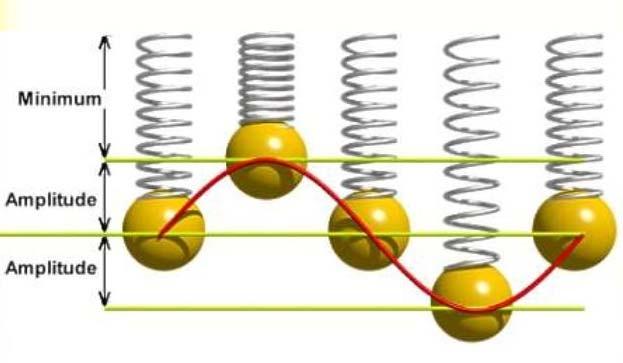
51 Amplituda Amplituda
52 Wóćmy do opisu matematycznego uchu hamonicznego. Równanie uchu hamonicznego wygląda w następujący sposób: x ( 0 t) Acos( ω t +ϕ ) Pędkość wynosi: dx ( t). Aω sin( ω t + ϕ 0 ) dt Pzyśpieszenie wynosi: d x( t) 2 dt 2 Aω cos( ω t + ϕ ) ω x.
53 Rezonans mechaniczny Czasami wato unikać ezonansu fakty 1. Most w pobliżu Manchesteu w Anglii załamał się pod ytmicznymi kokami zaledwie 60 ludzi 2. Batalion piechoty fancuskiej, pzechodzący ównym kokiem pzez most w Anges. Most unął gzebiąc pod sobą 280 żołniezy.
54 Każdy układ dgający ma okeśloną częstość dgań własnych. Zjawisko pobudzania do dgań za pomocą impulsów o częstotliwości ównej z częstotliwością dgań własnych pobudzanego układu nazywamy ezonansem mechanicznym. Ωω 0 częstość dgań wymuszonych częstości dgań własnych


55 Most w TACOMA Tacoma Naows Otwacie nastąpiło w maju listopada tego samego oku most zawalił się. Był to most wiszący w stylu At Deco ze stali i betonu. Główne pzęsło pzy długości 840 m miało zaledwie 12 m szeokości. Podczas mocniejszych podmuchów wiatu cały most tańczył pzy akompaniamencie pzeaźliwego dźwięku tących o siebie elementów metalowych. Rankiem 7 listopada wiat wiejący z pędkością dochodzącą do 67 km/h wpawił konstukcję w jej ostatni taniec. Ta katastofa dała wiele do myślenia achitektom. Od tamtej poy pomosty usztywnia się katownicami i nie pojektuje się tak wąskich konstukcji.
56
57 Ruch ciała a swobodnego Ciało sztywne zbió punktów, między któymi wzajemne odległości są stałe. Ruch ciała sztywnego w pzestzeni E 3 jest jednoznacznie opisany za pomocą tzech punktów sztywno związanych z tym ciałem i nie leżących na jednej postej.
58 z O A A B C B C y x Dla tzech punktów: A(x A, y A, z A ), B(x B, y B, z B ), C(x C, y C, z C ) mamy ównania wektoowe uchu: A, A () t, ( t) ( t) B B C C
59 Zauważmy, że dla ciała sztywnego odległości między punktami A, B, C są stałe:..,., const AC l const BC l const AB l AC BC AB Stąd mamy tzy ównania więzów : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) BC C B C B C B AC C A C A C A AB B A B A B A l z z y y x x l z z y y x x l z z y y x x Liczba stopni swobody ciała sztywnego
60 Liczba stopni swobody ciała sztywnego -jest to liczba niezależnych współzędnych okeślających położenie tego ciała. W pzestzeni E 3 ciało sztywne w uchu dowolnym posiada: k stopni swobody. Po nałożeniu na ciało sztywne pewnych oganiczeń uchu (więzów) zmniejszamy liczbę stopni swobody; np. w uchu obotowym wokół stałej osi ciało sztywne ma 1 stopień swobody (kąt obotu wokół tej osi).
61 Klasyfikacja uchów w ciała a sztywnego Ogólnym pzypadkiem uchu ciała sztywnego jest uch dowolny (swobodny) względem nieuchomego układu Oxyz. 1. Ruch dowolny ciała sztywnego; k6 2. Ruch postępowy ciała sztywnego; k3 3. Ruch obotowy ciała sztywnego wokół stałej osi; k1 4. Ruch płaski ciała sztywnego; k3 5. Ruch kulisty ciała sztywnego; k3
62 1. Ruch dowolny ciała a sztywnego; k6 2. Ruch postępowy ciała sztywnego; k3 3. Ruch obotowy ciała sztywnego wokół stałej osi; k1 4. Ruch płaski ciała sztywnego; k3 5. Ruch kulisty ciała sztywnego; k3
63 Ruch dowolny ciała a sztywnego Do opisu tego uchu wpowadzimy dwa układy odniesienia: Oxyz układ stały (nieuchomy), O 1 x 1 y 1 z 1 układ uchomy względem Oxyz. Z układem O 1 x 1 y 1 z 1 jest związane pewne ciało sztywne C 1. Intepetacja geometyczna uchu dowolnego: Ruch punktu A C 1 uch bieguna 0 1 +uch wokół bieguna 0 1
64 z A C 1 z 1 ρ O 1 y 1 o +ρ x 0 0 X 1 y (t) - wekto wodzący punktu A w układzie Oxyz. ρ ρ (t) - wekto wodzący punktu A w układzie O 1 z 1 y 1 z 1 (t) o o - wekto wodzący bieguna O1 w układzie Oxyz.
65 Chwilowy uch obotowy ciała C 1 (uch wokół bieguna 0 1 ) Δϕ z 1 ω Δϕ l y1 0 1 x1 l l Δ ϕ - wekto małego obotu [ad] względem chwilowej osi obotu l.
66 1. Ruch dowolny ciała sztywnego; k6 2. Ruch postępowy powy ciała a sztywnego; k3 3. Ruch obotowy ciała sztywnego wokół stałej osi; k1 4. Ruch płaski ciała sztywnego; k3 5. Ruch kulisty ciała sztywnego; k3
67 Ruch postępowy powy ciała a sztywnego Ruch postępowy ciała sztywnego - występuje wtedy, kiedy posta łącząca dwa dowolne punkty tego ciała pzemieszcza się ównolegle względem swego (t położenia 1 ) początkowego w czasie uchu. B 1 z (t) A 1 ρ B A ρ O A y x
68 W uchu postępowym wszystkie punkty ciała sztywnego mają takie same wektoy pędkości i pzyspieszenia i pouszają się po toach pzystających. Wnioski: Ruch postępowy ciała sztywnego jest okeślony jeżeli znamy uch dowolnego punktu tego ciała. Równania uchu dowolnego punktu A ciała: x A x A (t), y A y A (t), z A z A (t) Ciało sztywne w uchu postępowym ma 3 stopnie swobody.
69 1. Ruch dowolny ciała sztywnego; k6 2. Ruch postępowy ciała sztywnego; k3 3. Ruch obotowy ciała a sztywnego wokół stałej osi; k1 4. Ruch płaski ciała sztywnego; k3 5. Ruch kulisty ciała sztywnego; k3
70 Ruch obotowy ciała a sztywnego względem stałej osi Ruch obotowy ciała sztywnego występuje wtedy kiedy jedna posta związana z tym ciałem jest nieuchoma. z v B v C 0 B C ϕ A Każdy punkt ciała sztywnego w uchu obotowym pousza się po okęgu, któego płaszczyzna jest postopadła do osi obotu x O l y ϕ l, liczba stopni swobody: k3-21
71 1. Ruch dowolny ciała sztywnego; k6 2. Ruch postępowy ciała sztywnego; k3 3. Ruch obotowy ciała sztywnego wokół stałej osi; k1 4. Ruch płaski p aski ciała a sztywnego; k3 5. Ruch kulisty ciała sztywnego; k3
72 Ruch płaski p aski ciała a sztywnego Ruch płaski ciała sztywnego jest to uch, w któym wszystkie punkty tego ciała pouszają się w nieuchomych płaszczyznach ównoległych do pewnej płaszczyzny π o zwanej płaszczyzną kieującą.
73 z l F 0 B y π π o A π x l π o F π π o A i B F F figua płaska będąca pzekojem ciała sztywnego płaszczyzną π
74 Zauważmy, że w uchu płaskim wszystkie punkty ciała sztywnego leżące na postej l mają jednakowe pędkości i pzyspieszenia oaz pouszają się po identycznych toach. Wniosek: Ruch płaski ciała sztywnego można zastąpić uchem figuy płaskiej F, pozostającej w czasie uchu na płaszczyźnie π.
MECHANIKA OGÓLNA (II)
") MECHNIK GÓLN (II) Semest: II (Mechanika I), III (Mechanika II), ok akademicki 2017/2018 Liczba godzin: sem. II*) - wykład 30 godz., ćwiczenia 30 godz. sem. III*) - wykład 30 godz., ćwiczenia 30 godz. (dla
MECHNIK GÓLN (II) Semest: II (Mechanika I), III (Mechanika II), ok akademicki 2017/2018 Liczba godzin: sem. II*) - wykład 30 godz., ćwiczenia 30 godz. sem. III*) - wykład 30 godz., ćwiczenia 30 godz. (dla
11. DYNAMIKA RUCHU DRGAJĄCEGO
 11. DYNAMIKA RUCHU DRGAJĄCEGO Ruchem dgającym nazywamy uch, któy powtaza się peiodycznie w takcie jego twania w czasie i zachodzi wokół położenia ównowagi. Zespół obiektów fizycznych zapewniający wytwozenie
11. DYNAMIKA RUCHU DRGAJĄCEGO Ruchem dgającym nazywamy uch, któy powtaza się peiodycznie w takcie jego twania w czasie i zachodzi wokół położenia ównowagi. Zespół obiektów fizycznych zapewniający wytwozenie
Grzegorz Kornaś. Powtórka z fizyki
 Gzegoz Konaś Powtóka z fizyki - dla uczniów gimnazjów, któzy chcą wiedzieć to co tzeba, a nawet więcej, - dla uczniów liceów, któzy chcą powtózyć to co tzeba, aby zozumieć więcej, - dla wszystkich, któzy
Gzegoz Konaś Powtóka z fizyki - dla uczniów gimnazjów, któzy chcą wiedzieć to co tzeba, a nawet więcej, - dla uczniów liceów, któzy chcą powtózyć to co tzeba, aby zozumieć więcej, - dla wszystkich, któzy
Oddziaływania fundamentalne
 Oddziaływania fundamentalne Siła gawitacji (siła powszechnego ciążenia, oddziaływanie gawitacyjne) powoduje spadanie ciał i ządzi uchem ciał niebieskich Księżyc Ziemia Słońce Newton Dotyczy ciał posiadających
Oddziaływania fundamentalne Siła gawitacji (siła powszechnego ciążenia, oddziaływanie gawitacyjne) powoduje spadanie ciał i ządzi uchem ciał niebieskich Księżyc Ziemia Słońce Newton Dotyczy ciał posiadających
Wykład: praca siły, pojęcie energii potencjalnej. Zasada zachowania energii.
 Wykład: paca siły, pojęcie enegii potencjalnej. Zasada zachowania enegii. Uwaga: Obazki w tym steszczeniu znajdują się stonie www: http://www.whfeeman.com/tiple/content /instucto/inde.htm Pytanie: Co to
Wykład: paca siły, pojęcie enegii potencjalnej. Zasada zachowania enegii. Uwaga: Obazki w tym steszczeniu znajdują się stonie www: http://www.whfeeman.com/tiple/content /instucto/inde.htm Pytanie: Co to
00502 Podstawy kinematyki D Część 2 Iloczyn wektorowy i skalarny. Wektorowy opis ruchu. Względność ruchu. Prędkość w ruchu prostoliniowym.
 1 00502 Kinematyka D Dane osobowe właściciela akusza 00502 Podstawy kinematyki D Część 2 Iloczyn wektoowy i skalany. Wektoowy opis uchu. Względność uchu. Pędkość w uchu postoliniowym. Instukcja dla zdającego
1 00502 Kinematyka D Dane osobowe właściciela akusza 00502 Podstawy kinematyki D Część 2 Iloczyn wektoowy i skalany. Wektoowy opis uchu. Względność uchu. Pędkość w uchu postoliniowym. Instukcja dla zdającego
Ruch obrotowy. Wykład 6. Wrocław University of Technology
 Wykład 6 Wocław Univesity of Technology Oboty - definicje Ciało sztywne to ciało któe obaca się w taki sposób, że wszystkie jego części są związane ze sobą dzięki czemu kształt ciała nie ulega zmianie.
Wykład 6 Wocław Univesity of Technology Oboty - definicje Ciało sztywne to ciało któe obaca się w taki sposób, że wszystkie jego części są związane ze sobą dzięki czemu kształt ciała nie ulega zmianie.
II.6. Wahadło proste.
 II.6. Wahadło poste. Pzez wahadło poste ozumiemy uch oscylacyjny punktu mateialnego o masie m po dolnym łuku okęgu o pomieniu, w stałym polu gawitacyjnym g = constant. Fig. II.6.1. ozkład wektoa g pzyśpieszenia
II.6. Wahadło poste. Pzez wahadło poste ozumiemy uch oscylacyjny punktu mateialnego o masie m po dolnym łuku okęgu o pomieniu, w stałym polu gawitacyjnym g = constant. Fig. II.6.1. ozkład wektoa g pzyśpieszenia
WPROWADZENIE. Czym jest fizyka?
 WPROWADZENIE Czym jest fizyka? Fizyka odgywa dziś olę tego co dawniej nazywano filozofią pzyody i z czego zodziły się współczesne nauki pzyodnicze. Można powiedzieć, że fizyka stanowi system podstawowych
WPROWADZENIE Czym jest fizyka? Fizyka odgywa dziś olę tego co dawniej nazywano filozofią pzyody i z czego zodziły się współczesne nauki pzyodnicze. Można powiedzieć, że fizyka stanowi system podstawowych
Zasady dynamiki ruchu obrotowego
 DYNAMIKA (cz.) Dynamika układu punktów Śodek masy i uch śodka masy Dynamika były sztywnej Moment bezwładności, siły i pędu Zasada zachowania momentu pędu Pawo Steinea Zasady dynamiki uchu obotowego Politechnika
DYNAMIKA (cz.) Dynamika układu punktów Śodek masy i uch śodka masy Dynamika były sztywnej Moment bezwładności, siły i pędu Zasada zachowania momentu pędu Pawo Steinea Zasady dynamiki uchu obotowego Politechnika
BRYŁA SZTYWNA. Umowy. Aby uprościć rozważania w tym dziale będziemy przyjmować następujące umowy:
 Niektóe powody aby poznać ten dział: BRYŁA SZTYWNA stanowi dobe uzupełnienie mechaniki punktu mateialnego, opisuje wiele sytuacji z życia codziennego, ma wiele powiązań z innymi działami fizyki (temodynamika,
Niektóe powody aby poznać ten dział: BRYŁA SZTYWNA stanowi dobe uzupełnienie mechaniki punktu mateialnego, opisuje wiele sytuacji z życia codziennego, ma wiele powiązań z innymi działami fizyki (temodynamika,
IV.2. Efekt Coriolisa.
 IV.. Efekt oiolisa. Janusz B. Kępka Ruch absolutny i względny Załóżmy, że na wiującej taczy z pędkością kątową ω = constant ciało o masie m pzemieszcza się ze stałą pędkością = constant od punktu 0 wzdłuż
IV.. Efekt oiolisa. Janusz B. Kępka Ruch absolutny i względny Załóżmy, że na wiującej taczy z pędkością kątową ω = constant ciało o masie m pzemieszcza się ze stałą pędkością = constant od punktu 0 wzdłuż
1. Ciało sztywne, na które nie działa moment siły pozostaje w spoczynku lub porusza się ruchem obrotowym jednostajnym.
 Wykład 3. Zasada zachowania momentu pędu. Dynamika punktu mateialnego i były sztywnej. Ruch obotowy i postępowy Większość ciał w pzyodzie to nie punkty mateialne ale ozciągłe ciała sztywne tj. obiekty,
Wykład 3. Zasada zachowania momentu pędu. Dynamika punktu mateialnego i były sztywnej. Ruch obotowy i postępowy Większość ciał w pzyodzie to nie punkty mateialne ale ozciągłe ciała sztywne tj. obiekty,
Mechanika ruchu obrotowego
 Mechanika uchu obotowego Fizyka I (Mechanika) Wykład VII: Ruch po okęgu Ruch w jednoodnym polu elektycznym i magnetycznym Pawa uchu w układzie obacajacym się Pojęcia podstawowe Układ współzędnych Służy
Mechanika uchu obotowego Fizyka I (Mechanika) Wykład VII: Ruch po okęgu Ruch w jednoodnym polu elektycznym i magnetycznym Pawa uchu w układzie obacajacym się Pojęcia podstawowe Układ współzędnych Służy
Pęd, d zasada zac zasad a zac owan owan a p a p du Zgod Zg n od ie n ie z d r d u r g u im g pr p a r wem e N ew e tona ton :
 Mechanika ogólna Wykład n 13 Zasady zachowania w dynamice. Dynamika były sztywnej. Dynamika układu punktów mateialnych. 1 Zasady zachowania w dynamice Zasada: zachowania pędu; zachowania momentu pędu (kętu);
Mechanika ogólna Wykład n 13 Zasady zachowania w dynamice. Dynamika były sztywnej. Dynamika układu punktów mateialnych. 1 Zasady zachowania w dynamice Zasada: zachowania pędu; zachowania momentu pędu (kętu);
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
Podstawy Procesów i Konstrukcji Inżynierskich. Ruch obrotowy INZYNIERIAMATERIALOWAPL. Kierunek Wyróżniony przez PKA
 Podstawy Pocesów Konstukcj Inżyneskch Ruch obotowy Keunek Wyóżnony pzez PKA 1 Ruch jednostajny po okęgu Ruch cząstk nazywamy uchem jednostajnym po okęgu jeśl pousza sę ona po okęgu lub kołowym łuku z pędkoścą
Podstawy Pocesów Konstukcj Inżyneskch Ruch obotowy Keunek Wyóżnony pzez PKA 1 Ruch jednostajny po okęgu Ruch cząstk nazywamy uchem jednostajnym po okęgu jeśl pousza sę ona po okęgu lub kołowym łuku z pędkoścą
Siła tarcia. Tarcie jest zawsze przeciwnie skierowane do kierunku ruchu (do prędkości). R. D. Knight, Physics for scientists and engineers
. R. D. Knight, Physics for scientists and engineers") Siła tacia Tacie jest zawsze pzeciwnie skieowane do kieunku uchu (do pędkości). P. G. Hewitt, Fizyka wokół nas, PWN R. D. Knight, Physics fo scientists and enginees Symulacja molekulanego modelu tacia
Siła tacia Tacie jest zawsze pzeciwnie skieowane do kieunku uchu (do pędkości). P. G. Hewitt, Fizyka wokół nas, PWN R. D. Knight, Physics fo scientists and enginees Symulacja molekulanego modelu tacia
Fizyka. Wykład 2. Mateusz Suchanek
 Fizyka Wykład Mateusz Suchanek Zadanie utwalające Ruch punktu na płaszczyźnie okeślony jest ównaniai paaetycznyi: x sin(t ) y cos(t gdzie t oznacza czas. Znaleźć ównanie tou, położenie początkowe punktu,
Fizyka Wykład Mateusz Suchanek Zadanie utwalające Ruch punktu na płaszczyźnie okeślony jest ównaniai paaetycznyi: x sin(t ) y cos(t gdzie t oznacza czas. Znaleźć ównanie tou, położenie początkowe punktu,
XXXVII OLIMPIADA FIZYCZNA ETAP III Zadanie doświadczalne
 XXXVII OIMPIADA FIZYCZNA ETAP III Zadanie doświadczalne ZADANIE D Nazwa zadania: Obacający się pęt swobodnie Długi cienki pęt obaca się swobodnie wokół ustalonej pionowej osi, postopadłej do niego yc.
XXXVII OIMPIADA FIZYCZNA ETAP III Zadanie doświadczalne ZADANIE D Nazwa zadania: Obacający się pęt swobodnie Długi cienki pęt obaca się swobodnie wokół ustalonej pionowej osi, postopadłej do niego yc.
m q κ (11.1) q ω (11.2) ω =,
 q ω (11.2) ω =,") OPIS RUCHU, DRGANIA WŁASNE TŁUMIONE Oga Kopacz, Adam Łodygowski, Kzysztof Tymbe, Michał Płotkowiak, Wojciech Pawłowski Konsutacje naukowe: pof. d hab. Jezy Rakowski Poznań 00/00.. Opis uchu OPIS RUCHU
OPIS RUCHU, DRGANIA WŁASNE TŁUMIONE Oga Kopacz, Adam Łodygowski, Kzysztof Tymbe, Michał Płotkowiak, Wojciech Pawłowski Konsutacje naukowe: pof. d hab. Jezy Rakowski Poznań 00/00.. Opis uchu OPIS RUCHU
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
SKRYPT DO ZAJĘĆ WYRÓWNAWCZYCH Z FIZYKI DLA STUDENTÓW I ROKU AKADEMII MORSKIEJ W SZCZECINIE
 Publikacja współfinansowana ze śodków Unii Euopejskiej w amach Euopejskiego Funduszu Społecznego SKRYPT DO ZAJĘĆ WYRÓWNAWCZYCH Z FIZYKI DLA STUDENTÓW I ROKU AKADEMII MORSKIEJ W SZCZECINIE d Janusz Chzanowski
Publikacja współfinansowana ze śodków Unii Euopejskiej w amach Euopejskiego Funduszu Społecznego SKRYPT DO ZAJĘĆ WYRÓWNAWCZYCH Z FIZYKI DLA STUDENTÓW I ROKU AKADEMII MORSKIEJ W SZCZECINIE d Janusz Chzanowski
8. PŁASKIE ZAGADNIENIA TEORII SPRĘŻYSTOŚCI
 8. PŁASKIE ZAGADNIENIA TEORII SPRĘŻYSTOŚCI 8. 8. PŁASKIE ZAGADNIENIA TEORII SPRĘŻYSTOŚCI 8.. Płaski stan napężenia Tacza układ, ustój ciągły jednoodny, w któym jeden wymia jest znacznie mniejszy od pozostałych,
8. PŁASKIE ZAGADNIENIA TEORII SPRĘŻYSTOŚCI 8. 8. PŁASKIE ZAGADNIENIA TEORII SPRĘŻYSTOŚCI 8.. Płaski stan napężenia Tacza układ, ustój ciągły jednoodny, w któym jeden wymia jest znacznie mniejszy od pozostałych,
dr inż. Zbigniew Szklarski
 ykład 5: Paca i enegia d inż. Zbigniew Szklaski szkla@agh.edu.pl http://laye.uci.agh.edu.pl/z.szklaski/ Enegia a paca Enegia jest to wielkość skalana, okeślająca stan, w jakim znajduje się jedno lub wiele
ykład 5: Paca i enegia d inż. Zbigniew Szklaski szkla@agh.edu.pl http://laye.uci.agh.edu.pl/z.szklaski/ Enegia a paca Enegia jest to wielkość skalana, okeślająca stan, w jakim znajduje się jedno lub wiele
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w popzednim odcinku 1 Zasady dynamiki Newtona I II Każde ciało twa w stanie spoczynku lub pousza się uchem postoliniowym i jednostajnym, jeśli siły pzyłożone nie zmuszają ciała do zmiany tego stanu Zmiana
w popzednim odcinku 1 Zasady dynamiki Newtona I II Każde ciało twa w stanie spoczynku lub pousza się uchem postoliniowym i jednostajnym, jeśli siły pzyłożone nie zmuszają ciała do zmiany tego stanu Zmiana
Pole grawitacyjne. Definicje. Rodzaje pól. Rodzaje pól... Notatki. Notatki. Notatki. Notatki. dr inż. Ireneusz Owczarek.
 Pole gawitacyjne d inż. Ieneusz Owczaek CNMiF PŁ ieneusz.owczaek@p.lodz.pl http://cmf.p.lodz.pl/iowczaek 1 d inż. Ieneusz Owczaek Pole gawitacyjne Definicje to pzestzenny ozkład wielkości fizycznej. jest
Pole gawitacyjne d inż. Ieneusz Owczaek CNMiF PŁ ieneusz.owczaek@p.lodz.pl http://cmf.p.lodz.pl/iowczaek 1 d inż. Ieneusz Owczaek Pole gawitacyjne Definicje to pzestzenny ozkład wielkości fizycznej. jest
Wykład 10. Reinhard Kulessa 1
 Wykład 1 14.1 Podstawowe infomacje doświadczalne cd. 14. Pąd elektyczny jako źódło pola magnetycznego 14..1 Pole indukcji magnetycznej pochodzące od nieskończenie długiego pzewodnika z pądem. 14.. Pawo
Wykład 1 14.1 Podstawowe infomacje doświadczalne cd. 14. Pąd elektyczny jako źódło pola magnetycznego 14..1 Pole indukcji magnetycznej pochodzące od nieskończenie długiego pzewodnika z pądem. 14.. Pawo
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w popzednim odcinku 1 Zasady zachowania: enegia mechaniczna E E const. k p E p ()+E k (v) = 0 W układzie zachowawczym odosobnionym całkowita enegia mechaniczna, czyli suma enegii potencjalnej, E p, zaówno
w popzednim odcinku 1 Zasady zachowania: enegia mechaniczna E E const. k p E p ()+E k (v) = 0 W układzie zachowawczym odosobnionym całkowita enegia mechaniczna, czyli suma enegii potencjalnej, E p, zaówno
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w popzednim odcinku 1 8 gudnia KOLOKWIUM W pzyszłym tygodniu więcej infomacji o pytaniach i tym jak pzepowadzimy te kolokwium 2 Moment bezwładności Moment bezwładności masy punktowej m pouszającej się
w popzednim odcinku 1 8 gudnia KOLOKWIUM W pzyszłym tygodniu więcej infomacji o pytaniach i tym jak pzepowadzimy te kolokwium 2 Moment bezwładności Moment bezwładności masy punktowej m pouszającej się
Lista zadań nr 1 - Wektory
 Lista zadań n 1 - Wektoy Zad. 1 Dane są dwa wektoy: a = 3i + 4 j + 5k, b = i + k. Obliczyć: a) długość każdego wektoa, b) iloczyn skalany a b, c) kąt zawaty między wektoami,, d) iloczyn wektoowy a b e)
Lista zadań n 1 - Wektoy Zad. 1 Dane są dwa wektoy: a = 3i + 4 j + 5k, b = i + k. Obliczyć: a) długość każdego wektoa, b) iloczyn skalany a b, c) kąt zawaty między wektoami,, d) iloczyn wektoowy a b e)
Siły oporu prędkość graniczna w spadku swobodnym
 FZYKA Wykład echanika: Pojęcia podstawowe dynamika i punktu histoia mateialnego (V) Siły opou pędkość ganiczna w spadku swobodnym Układy Pojęcia nieinecjalne podstawowe () i histoia Siły w układach nieinecjalnych
FZYKA Wykład echanika: Pojęcia podstawowe dynamika i punktu histoia mateialnego (V) Siły opou pędkość ganiczna w spadku swobodnym Układy Pojęcia nieinecjalne podstawowe () i histoia Siły w układach nieinecjalnych
Moment pędu w geometrii Schwarzshilda
 Moent pędu w geoetii Schwazshilda Zasada aksyalnego stazenia się : Doga po jakiej pousza się cząstka swobodna poiędzy dwoa zdazeniai w czasopzestzeni jest taka aby czas ziezony w układzie cząstki był aksyalny.
Moent pędu w geoetii Schwazshilda Zasada aksyalnego stazenia się : Doga po jakiej pousza się cząstka swobodna poiędzy dwoa zdazeniai w czasopzestzeni jest taka aby czas ziezony w układzie cząstki był aksyalny.
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
KINEMATYCZNE WŁASNOW PRZEKŁADNI
 KINEMATYCZNE WŁASNOW ASNOŚCI PRZEKŁADNI Waunki współpacy pacy zazębienia Zasada n 1 - koła zębate mogą ze sobą współpacować, kiedy mają ten sam moduł m. Czy to wymaganie jest wystaczające dla pawidłowej
KINEMATYCZNE WŁASNOW ASNOŚCI PRZEKŁADNI Waunki współpacy pacy zazębienia Zasada n 1 - koła zębate mogą ze sobą współpacować, kiedy mają ten sam moduł m. Czy to wymaganie jest wystaczające dla pawidłowej
Fizyka 10. Janusz Andrzejewski
 Fizyka 10 Pawa Keplea Nauki Aystotelesa i Ptolemeusza: wszystkie planety i gwiazdy pouszają się wokół Ziemi po skomplikowanych toach( będących supepozycjami uchów Ppo okęgach); Mikołaj Kopenik(1540): planety
Fizyka 10 Pawa Keplea Nauki Aystotelesa i Ptolemeusza: wszystkie planety i gwiazdy pouszają się wokół Ziemi po skomplikowanych toach( będących supepozycjami uchów Ppo okęgach); Mikołaj Kopenik(1540): planety
Energia kinetyczna i praca. Energia potencjalna
 negia kinetyczna i paca. negia potencjalna Wykład 4 Wocław Univesity of Technology 1 NRGIA KINTYCZNA I PRACA 5.XI.011 Paca Kto wykonał większą pacę? Hossein Rezazadeh Olimpiada w Atenach 004 WR Podzut
negia kinetyczna i paca. negia potencjalna Wykład 4 Wocław Univesity of Technology 1 NRGIA KINTYCZNA I PRACA 5.XI.011 Paca Kto wykonał większą pacę? Hossein Rezazadeh Olimpiada w Atenach 004 WR Podzut
Ruch jednostajny po okręgu
 Ruch jednostajny po okęgu W uchu jednostajnym po okęgu pędkość punktu mateialnego jest stała co do watości ale zmienia się jej kieunek. Kieunek pędkości jest zawsze styczny do okęgu będącego toem. Watość
Ruch jednostajny po okęgu W uchu jednostajnym po okęgu pędkość punktu mateialnego jest stała co do watości ale zmienia się jej kieunek. Kieunek pędkości jest zawsze styczny do okęgu będącego toem. Watość
WYZNACZANIE MOMENTU BEZWŁADNOSCI KRĄŻKA
 Ćwiczenie -7 WYZNACZANE OENTU BEZWŁADNOSC KRĄŻKA. Cel ćwiczenia: zapoznanie się z teoią momentu bezwładności. Wyznaczenie momentu bezwładności były względem osi obotu z siłą tacia i bez tej siły, wyznaczenie
Ćwiczenie -7 WYZNACZANE OENTU BEZWŁADNOSC KRĄŻKA. Cel ćwiczenia: zapoznanie się z teoią momentu bezwładności. Wyznaczenie momentu bezwładności były względem osi obotu z siłą tacia i bez tej siły, wyznaczenie
Prędkość i przyspieszenie punktu bryły w ruchu kulistym
 Pędkość i pzyspieszenie punktu były w uchu kulistym Położenie dowolnego punktu były okeślmy z pomocą wekto (o stłej długości) któego współzędne możemy podć w nieuchomym ukłdzie osi x y z ) z b) ζ ζ η z
Pędkość i pzyspieszenie punktu były w uchu kulistym Położenie dowolnego punktu były okeślmy z pomocą wekto (o stłej długości) któego współzędne możemy podć w nieuchomym ukłdzie osi x y z ) z b) ζ ζ η z
Fizyka 11. Janusz Andrzejewski
 Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
dr inż. Zbigniew Szklarski
 ykład 5: Paca i enegia d inż. Zbigniew Szklaski szkla@agh.edu.pl http://laye.uci.agh.edu.pl/z.szklaski/ Enegia a paca Enegia jest to wielkość skalana, okeślająca stan, w jakim znajduje się jedno lub wiele
ykład 5: Paca i enegia d inż. Zbigniew Szklaski szkla@agh.edu.pl http://laye.uci.agh.edu.pl/z.szklaski/ Enegia a paca Enegia jest to wielkość skalana, okeślająca stan, w jakim znajduje się jedno lub wiele
POLE MAGNETYCZNE W PRÓŻNI. W roku 1820 Oersted zaobserwował oddziaływanie przewodnika, w którym płynął
 POLE MAGNETYCZNE W PÓŻNI W oku 8 Oested zaobsewował oddziaływanie pzewodnika, w któym płynął pąd, na igłę magnetyczną Dopowadziło to do wniosku, że pądy elektyczne są pzyczyną powstania pola magnetycznego
POLE MAGNETYCZNE W PÓŻNI W oku 8 Oested zaobsewował oddziaływanie pzewodnika, w któym płynął pąd, na igłę magnetyczną Dopowadziło to do wniosku, że pądy elektyczne są pzyczyną powstania pola magnetycznego
Wykład 5: Dynamika. dr inż. Zbigniew Szklarski
 Wykład 5: Dynamika d inż. Zbigniew Szklaski szkla@agh.edu.pl http://laye.uci.agh.edu.pl/z.szklaski/ Pzyczyny uchu - zasady dynamiki dla punktu mateialnego Jeśli ciało znajduje się we właściwym miejscu,
Wykład 5: Dynamika d inż. Zbigniew Szklaski szkla@agh.edu.pl http://laye.uci.agh.edu.pl/z.szklaski/ Pzyczyny uchu - zasady dynamiki dla punktu mateialnego Jeśli ciało znajduje się we właściwym miejscu,
SK-7 Wprowadzenie do metody wektorów przestrzennych SK-8 Wektorowy model silnika indukcyjnego, klatkowego
 Ćwiczenia: SK-7 Wpowadzenie do metody wektoów pzetzennych SK-8 Wektoowy model ilnika indukcyjnego, klatkowego Wpowadzenie teoetyczne Wekto pzetzenny definicja i poawowe zależności. Dowolne wielkości kalane,
Ćwiczenia: SK-7 Wpowadzenie do metody wektoów pzetzennych SK-8 Wektoowy model ilnika indukcyjnego, klatkowego Wpowadzenie teoetyczne Wekto pzetzenny definicja i poawowe zależności. Dowolne wielkości kalane,
Fizyka dla Informatyki Stosowanej
 Fizyka dla Infomatyki Stosowanej Jacek Golak Semest zimowy 06/07 Wykład n 3 Na popzednim wykładzie poznaliśmy pawa uchu i wiemy, jak opisać uch punktu mateialnego w inecjalnym układzie odniesienia. Zasady
Fizyka dla Infomatyki Stosowanej Jacek Golak Semest zimowy 06/07 Wykład n 3 Na popzednim wykładzie poznaliśmy pawa uchu i wiemy, jak opisać uch punktu mateialnego w inecjalnym układzie odniesienia. Zasady
MECHANIKA 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
Siła. Zasady dynamiki
 Siła. Zasady dynaiki Siła jest wielkością wektoową. Posiada okeśloną watość, kieunek i zwot. Jednostką siły jest niuton (N). 1N=1 k s 2 Pzedstawienie aficzne A Siła pzyłożona jest do ciała w punkcie A,
Siła. Zasady dynaiki Siła jest wielkością wektoową. Posiada okeśloną watość, kieunek i zwot. Jednostką siły jest niuton (N). 1N=1 k s 2 Pzedstawienie aficzne A Siła pzyłożona jest do ciała w punkcie A,
θ = s r, gdzie s oznacza długość łuku okręgu o promieniu r odpowiadającą kątowi 2. Rys Obrót ciała wokół osi z
 IX. OBROTY 9.1. Zmienne obotowe W celu opisania uchu obotowego ciała wokół ustalonej osi (zwanej osią obotu) należy wybać linię postopadłą do osi obotu, któa jest związana z ciałem i któa obaca się waz
IX. OBROTY 9.1. Zmienne obotowe W celu opisania uchu obotowego ciała wokół ustalonej osi (zwanej osią obotu) należy wybać linię postopadłą do osi obotu, któa jest związana z ciałem i któa obaca się waz
Fizyka. Wyższa SzkołaTurystykiiEkologii i Wydział Informatyki, rok I. Wykład pierwszy.
 Fizyka Wykład piewszy (8 mazec2014) Wpowadzenie. Mechanika Powadzący: e mail: stona www: D inż. Andzej Skoczeń sucha@skoczen.pl http://skoczen.pl/sucha/fizyka Wyższa SzkołaTuystykiiEkologii i Wydział Infomatyki,
Fizyka Wykład piewszy (8 mazec2014) Wpowadzenie. Mechanika Powadzący: e mail: stona www: D inż. Andzej Skoczeń sucha@skoczen.pl http://skoczen.pl/sucha/fizyka Wyższa SzkołaTuystykiiEkologii i Wydział Infomatyki,
LITERATURA Resnick R., Holliday O., Acosta V., Cowan C. L., Graham B. J., Wróblewski A. K., Zakrzewski J. A., Kleszczewski Z., Zastawny A.
 LITERATURA. Resnick R., Holliday O., Fizyka, Tom i, lub nowe wydanie 5-tomowe. Acosta V., Cowan C. L., Gaham B. J., Podstawy Fizyki Współczesnej, 98,PWN. 3. Wóblewski A. K., Zakzewski J. A., Wstęp Do Fizyki,
LITERATURA. Resnick R., Holliday O., Fizyka, Tom i, lub nowe wydanie 5-tomowe. Acosta V., Cowan C. L., Gaham B. J., Podstawy Fizyki Współczesnej, 98,PWN. 3. Wóblewski A. K., Zakzewski J. A., Wstęp Do Fizyki,
Energia kinetyczna i praca. Energia potencjalna
 Enegia kinetyczna i paca. Enegia potencjalna Wykład 4 Wocław Uniesity of Technology 1 5-XI-011 5.XI.011 Paca Kto wykonał większą pacę? Hossein Rezazadeh Olimpiada w Atenach 004 WR Podzut 63 kg Paul Andeson
Enegia kinetyczna i paca. Enegia potencjalna Wykład 4 Wocław Uniesity of Technology 1 5-XI-011 5.XI.011 Paca Kto wykonał większą pacę? Hossein Rezazadeh Olimpiada w Atenach 004 WR Podzut 63 kg Paul Andeson
Plan wykładu. Rodzaje pól
 Plan wykładu Pole gawitacyjne d inż. Ieneusz Owczaek CMF PŁ ieneusz.owczaek@p.lodz.pl http://cmf.p.lodz.pl/iowczaek 2013/14 1 Wielkości chaakteyzujace pole Pawo Gaussa wewnatz Ziemi 2 Enegia układu ciał
Plan wykładu Pole gawitacyjne d inż. Ieneusz Owczaek CMF PŁ ieneusz.owczaek@p.lodz.pl http://cmf.p.lodz.pl/iowczaek 2013/14 1 Wielkości chaakteyzujace pole Pawo Gaussa wewnatz Ziemi 2 Enegia układu ciał
MECHANIKA OGÓLNA (II)
") MECHNIK GÓLN (II) Semestr: II (Mechanika I), III (Mechanika II), rok akad. 2013/2014 Liczba godzin: sem. II *) - wykład 30 godz., ćwiczenia 30 godz. sem. III *) - wykład 30 godz., ćwiczenia 30 godz., ale
MECHNIK GÓLN (II) Semestr: II (Mechanika I), III (Mechanika II), rok akad. 2013/2014 Liczba godzin: sem. II *) - wykład 30 godz., ćwiczenia 30 godz. sem. III *) - wykład 30 godz., ćwiczenia 30 godz., ale
Mechanika ogólna. Łuki, sklepienia. Zalety łuków (2) Zalety łuków (1) Geometria łuku (1) Geometria łuku (2) Kształt osi łuku (2) Kształt osi łuku (1)
 Zalety łuków (1) Geometria łuku (1) Geometria łuku (2) Kształt osi łuku (2) Kształt osi łuku (1)") Łuki, sklepienia Mechanika ogólna Wykład n 12 Pęty o osi zakzywionej. Łuki. Łuk: pęt o osi zakzywionej (w stanie nieodkształconym) w płaszczyźnie działania sił i podpaty na końcach w taki sposób, że podpoy
Łuki, sklepienia Mechanika ogólna Wykład n 12 Pęty o osi zakzywionej. Łuki. Łuk: pęt o osi zakzywionej (w stanie nieodkształconym) w płaszczyźnie działania sił i podpaty na końcach w taki sposób, że podpoy
Zjawisko indukcji. Magnetyzm materii.
 Zjawisko indukcji. Magnetyzm mateii. Wykład 6 Wocław Univesity of Technology -04-0 Dwa symetyczne pzypadki PĘTLA Z PĄDEM MOMENT SIŁY + + POLE MAGNETYCZNE POLE MAGNETYCZNE P A W O I N D U K C J I MOMENT
Zjawisko indukcji. Magnetyzm mateii. Wykład 6 Wocław Univesity of Technology -04-0 Dwa symetyczne pzypadki PĘTLA Z PĄDEM MOMENT SIŁY + + POLE MAGNETYCZNE POLE MAGNETYCZNE P A W O I N D U K C J I MOMENT
R o z d z i a ł 2 KINEMATYKA PUNKTU MATERIALNEGO
 R o z d z i a ł KINEMATYKA PUNKTU MATERIALNEGO Kinematyka zajmuje się opisem ruchu ciał bez uwzględniania ich masy i bez rozpatrywania przyczyn, które ten ruch spowodowały. Przez punkt materialny rozumiemy
R o z d z i a ł KINEMATYKA PUNKTU MATERIALNEGO Kinematyka zajmuje się opisem ruchu ciał bez uwzględniania ich masy i bez rozpatrywania przyczyn, które ten ruch spowodowały. Przez punkt materialny rozumiemy
PRĄD ELEKTRYCZNY I SIŁA MAGNETYCZNA
 PĄD LKTYCZNY SŁA MAGNTYCZNA Na ładunek, opócz siły elektostatycznej, działa ównież siła magnetyczna popocjonalna do pędkości ładunku v. Pzekonamy się, że siła działająca na magnes to siła działająca na
PĄD LKTYCZNY SŁA MAGNTYCZNA Na ładunek, opócz siły elektostatycznej, działa ównież siła magnetyczna popocjonalna do pędkości ładunku v. Pzekonamy się, że siła działająca na magnes to siła działająca na
Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!)
") Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!) Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Kinematyka ruchu
Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!) Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Kinematyka ruchu
Wykład 17. 13 Półprzewodniki
 Wykład 17 13 Półpzewodniki 13.1 Rodzaje półpzewodników 13.2 Złącze typu n-p 14 Pole magnetyczne 14.1 Podstawowe infomacje doświadczalne 14.2 Pąd elektyczny jako źódło pola magnetycznego Reinhad Kulessa
Wykład 17 13 Półpzewodniki 13.1 Rodzaje półpzewodników 13.2 Złącze typu n-p 14 Pole magnetyczne 14.1 Podstawowe infomacje doświadczalne 14.2 Pąd elektyczny jako źódło pola magnetycznego Reinhad Kulessa
ZASADY DYNAMIKI. Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał.
 ZASADY DYNAMIKI Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał Dynamika klasyczna zbudowana jest na trzech zasadach podanych przez Newtona w 1687 roku I zasada dynamiki Istnieją
ZASADY DYNAMIKI Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał Dynamika klasyczna zbudowana jest na trzech zasadach podanych przez Newtona w 1687 roku I zasada dynamiki Istnieją
Zastosowanie zasad dynamiki Newtona.
 Wykład z fizyki. Piot Posmykiewicz 33 W Y K Ł A D IV Zastosowanie zasad dynamiki Newtona. W wykładzie tym zostanie omówione zastosowanie zasad dynamiki w zagadnieniach związanych z taciem i uchem po okęgu.
Wykład z fizyki. Piot Posmykiewicz 33 W Y K Ł A D IV Zastosowanie zasad dynamiki Newtona. W wykładzie tym zostanie omówione zastosowanie zasad dynamiki w zagadnieniach związanych z taciem i uchem po okęgu.
GRAWITACJA. przyciągają się wzajemnie siłą proporcjonalną do iloczynu ich mas i odwrotnie proporcjonalną do kwadratu ich odległości r.
 GRAWITACJA Pawo powszechnego ciążenia (pawo gawitacji) Dwa punkty mateialne o masach m 1 i m pzyciągają się wzajemnie siłą popocjonalną do iloczynu ich mas i odwotnie popocjonalną do kwadatu ich odległości.
GRAWITACJA Pawo powszechnego ciążenia (pawo gawitacji) Dwa punkty mateialne o masach m 1 i m pzyciągają się wzajemnie siłą popocjonalną do iloczynu ich mas i odwotnie popocjonalną do kwadatu ich odległości.
FIZYKA 2. Janusz Andrzejewski
 FIZYKA 2 wykład 4 Janusz Andzejewski Pole magnetyczne Janusz Andzejewski 2 Pole gawitacyjne γ Pole elektyczne E Definicja wektoa B = γ E = Indukcja magnetyczna pola B: F B F G m 0 F E q 0 qv B = siła Loentza
FIZYKA 2 wykład 4 Janusz Andzejewski Pole magnetyczne Janusz Andzejewski 2 Pole gawitacyjne γ Pole elektyczne E Definicja wektoa B = γ E = Indukcja magnetyczna pola B: F B F G m 0 F E q 0 qv B = siła Loentza
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w popzednim odcinku 1 Paca Paca jest ówna iloczynowi pzemieszczenia oaz siły, któa te pzemieszczenie wywołuje. Paca jest wielkością skalaną wyażaną w dżulach (ang. Joul) [J] i w ogólności może być zdefiniowana
w popzednim odcinku 1 Paca Paca jest ówna iloczynowi pzemieszczenia oaz siły, któa te pzemieszczenie wywołuje. Paca jest wielkością skalaną wyażaną w dżulach (ang. Joul) [J] i w ogólności może być zdefiniowana
Próba określenia miary jakości informacji na gruncie teorii grafów dla potrzeb dydaktyki
 Póba okeślenia miay jakości infomacji na guncie teoii gafów dla potzeb dydaktyki Zbigniew Osiak E-mail: zbigniew.osiak@gmail.com http://ocid.og/0000-0002-5007-306x http://via.og/autho/zbigniew_osiak Steszczenie
Póba okeślenia miay jakości infomacji na guncie teoii gafów dla potzeb dydaktyki Zbigniew Osiak E-mail: zbigniew.osiak@gmail.com http://ocid.og/0000-0002-5007-306x http://via.og/autho/zbigniew_osiak Steszczenie
Wykład FIZYKA I. 8. Grawitacja. Dr hab. inż. Władysław Artur Woźniak
 Wykład FIZYKA I 8. Gawitacja D hab. inż. Władysław Atu Woźniak Instytut Fizyki Politechniki Wocławskiej http://www.if.pw.woc.pl/~wozniak/fizyka1.html CIĄŻENIE POWSZECHNE (GRAWITACJA) Wzajemne pzyciąganie
Wykład FIZYKA I 8. Gawitacja D hab. inż. Władysław Atu Woźniak Instytut Fizyki Politechniki Wocławskiej http://www.if.pw.woc.pl/~wozniak/fizyka1.html CIĄŻENIE POWSZECHNE (GRAWITACJA) Wzajemne pzyciąganie
PRACA MOC ENERGIA. Z uwagi na to, że praca jest iloczynem skalarnym jej wartość zależy również od kąta pomiędzy siłą F a przemieszczeniem r
 PRACA MOC ENERGIA Paca Pojęcie pacy używane jest zaówno w fizyce (w sposób ścisły) jak i w życiu codziennym (w sposób potoczny), jednak obie te definicje nie pokywają się Paca w sensie potocznym to każda
PRACA MOC ENERGIA Paca Pojęcie pacy używane jest zaówno w fizyce (w sposób ścisły) jak i w życiu codziennym (w sposób potoczny), jednak obie te definicje nie pokywają się Paca w sensie potocznym to każda
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
Modelowanie przepływu cieczy przez ośrodki porowate Wykład III
 Modelowanie pzepływu cieczy pzez ośodki poowate Wykład III 6 Ogólne zasady ozwiązywania ównań hydodynamicznego modelu pzepływu. Metody ozwiązania ównania Laplace a. Wpowadzenie wielkości potencjału pędkości
Modelowanie pzepływu cieczy pzez ośodki poowate Wykład III 6 Ogólne zasady ozwiązywania ównań hydodynamicznego modelu pzepływu. Metody ozwiązania ównania Laplace a. Wpowadzenie wielkości potencjału pędkości
Na skutek takiego przemieszcznia ładunku, energia potencjalna układu pole-ładunek zmienia się o:
 E 0 Na ładunek 0 znajdujący się w polu elektycznym o natężeniu E działa siła elektostatyczna: F E 0 Paca na pzemieszczenie ładunku 0 o ds wykonana pzez pole elektyczne: dw Fds 0E ds Na skutek takiego pzemieszcznia
E 0 Na ładunek 0 znajdujący się w polu elektycznym o natężeniu E działa siła elektostatyczna: F E 0 Paca na pzemieszczenie ładunku 0 o ds wykonana pzez pole elektyczne: dw Fds 0E ds Na skutek takiego pzemieszcznia
CHARAKTERYSTYKI GEOMETRYCZNE FIGUR PŁASKICH
 Politecnika Rzeszowska Wydział Budowy Maszyn i Lotnictwa Kateda Samolotów i Silników Lotniczyc Pomoce dydaktyczne Wytzymałość Mateiałów CHRKTERYSTYKI GEOMETRYCZNE FIGUR PŁSKICH Łukasz Święc Rzeszów, 18
Politecnika Rzeszowska Wydział Budowy Maszyn i Lotnictwa Kateda Samolotów i Silników Lotniczyc Pomoce dydaktyczne Wytzymałość Mateiałów CHRKTERYSTYKI GEOMETRYCZNE FIGUR PŁSKICH Łukasz Święc Rzeszów, 18
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej
 MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Fizyka I (Mechanika) Wykład II: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny, ruch jednostajnie przyspieszony
Kinematyka: opis ruchu Fizyka I (Mechanika) Wykład II: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny, ruch jednostajnie przyspieszony
GEOMETRIA PŁASZCZYZNY
 GEOMETRIA PŁASZCZYZNY. Oblicz pole tapezu ównoamiennego, któego podstawy mają długość cm i 0 cm, a pzekątne są do siebie postopadłe.. Dany jest kwadat ABCD. Punkty E i F są śodkami boków BC i CD. Wiedząc,
GEOMETRIA PŁASZCZYZNY. Oblicz pole tapezu ównoamiennego, któego podstawy mają długość cm i 0 cm, a pzekątne są do siebie postopadłe.. Dany jest kwadat ABCD. Punkty E i F są śodkami boków BC i CD. Wiedząc,
L(x, 0, y, 0) = x 2 + y 2 (3)
 = x 2 + y 2 (3)") 0. Małe dgania Kótka notatka o małych dganiach wyjasniające możliwe niejasności. 0. Poszukiwanie punktów ównowagi Punkty ównowagi wyznaczone są waunkami x i = 0, ẋi = 0 ( Pochodna ta jest ówna pochodnej
0. Małe dgania Kótka notatka o małych dganiach wyjasniające możliwe niejasności. 0. Poszukiwanie punktów ównowagi Punkty ównowagi wyznaczone są waunkami x i = 0, ẋi = 0 ( Pochodna ta jest ówna pochodnej
Metody optymalizacji. dr inż. Paweł Zalewski Akademia Morska w Szczecinie
 Metody optymalizacji d inż. Paweł Zalewski kademia Moska w Szczecinie Optymalizacja - definicje: Zadaniem optymalizacji jest wyznaczenie spośód dopuszczalnych ozwiązań danego polemu ozwiązania najlepszego
Metody optymalizacji d inż. Paweł Zalewski kademia Moska w Szczecinie Optymalizacja - definicje: Zadaniem optymalizacji jest wyznaczenie spośód dopuszczalnych ozwiązań danego polemu ozwiązania najlepszego
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
Ruch kulisty bryły. Kinematyka
 Ruch kulist bł. Kinematka Ruchem kulistm nawam uch, w casie któego jeden punktów bł jest stale nieuchom. Ruch kulist jest obotem dookoła chwilowej osi obotu (oś ta mienia swoje położenie w casie). a) b)
Ruch kulist bł. Kinematka Ruchem kulistm nawam uch, w casie któego jeden punktów bł jest stale nieuchom. Ruch kulist jest obotem dookoła chwilowej osi obotu (oś ta mienia swoje położenie w casie). a) b)
Zasady dynamiki Isaak Newton (1686 r.)
") Zasady dynamiki Isaak Newton (1686 r.) I (zasada bezwładności) Istnieje taki układ odniesienia, w którym ciało pozostaje w spoczynku lub porusza się ruchem jednostajnym prostoliniowym, jeśli nie działają
Zasady dynamiki Isaak Newton (1686 r.) I (zasada bezwładności) Istnieje taki układ odniesienia, w którym ciało pozostaje w spoczynku lub porusza się ruchem jednostajnym prostoliniowym, jeśli nie działają
Fizyka 1- Mechanika. Wykład 5 2.XI Zygmunt Szefliński Środowiskowe Laboratorium Ciężkich Jonów
 izyka 1- Mechanika Wykład 5.XI.017 Zygunt Szefliński Śodowiskowe Laboatoiu Ciężkich Jonów szef@fuw.edu.pl http://www.fuw.edu.pl/~szef/ Ruch po okęgu - bezwładność Aby ciało pozostawało w uchu po okęgu
izyka 1- Mechanika Wykład 5.XI.017 Zygunt Szefliński Śodowiskowe Laboatoiu Ciężkich Jonów szef@fuw.edu.pl http://www.fuw.edu.pl/~szef/ Ruch po okęgu - bezwładność Aby ciało pozostawało w uchu po okęgu
Podstawy fizyki sezon 1 VII. Ruch drgający
 Podstawy fizyki sezon 1 VII. Ruch drgający Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Ruch skutkiem działania
Podstawy fizyki sezon 1 VII. Ruch drgający Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Ruch skutkiem działania
podsumowanie (E) E l Eds 0 V jds
 E l Eds 0 V jds") e-8.6.7 fale podsumowanie () Γ dl 1 ds ρ d S ε V D ds ρ d S ( ϕ ) 1 ρ ε D ρ D ρ V D ( D εε ) εε S jds V ρ d t j ρ t j σ podsumowanie (H) Bdl Γ μ S jds B μ j S Bds B ( B A) Hdl Γ S jds H j ( B μμ H ) ε
e-8.6.7 fale podsumowanie () Γ dl 1 ds ρ d S ε V D ds ρ d S ( ϕ ) 1 ρ ε D ρ D ρ V D ( D εε ) εε S jds V ρ d t j ρ t j σ podsumowanie (H) Bdl Γ μ S jds B μ j S Bds B ( B A) Hdl Γ S jds H j ( B μμ H ) ε
Magnetyzm. A. Sieradzki IF PWr. Pole magnetyczne ŁADUNEK ELEKTRYCZNY ŁADUNEK MAGNETYCZNY POLE ELEKTRYCZNE POLE MAGNETYCZNE
 Magnetyzm Wykład 5 1 Wocław Univesity of Technology 14-4-1 Pole magnetyczne ŁADUNEK ELEKTRYCZNY ŁADUNEK MAGNETYCZNY? POLE ELEKTRYCZNE POLE MAGNETYCZNE Jak wytwozyć pole magnetyczne? 1) Naładowane elektycznie
Magnetyzm Wykład 5 1 Wocław Univesity of Technology 14-4-1 Pole magnetyczne ŁADUNEK ELEKTRYCZNY ŁADUNEK MAGNETYCZNY? POLE ELEKTRYCZNE POLE MAGNETYCZNE Jak wytwozyć pole magnetyczne? 1) Naładowane elektycznie
Mechanika ogólna. Łuki, sklepienia. Zalety łuków (1) Zalety łuków (2) Geometria łuku (2) Geometria łuku (1) Kształt osi łuku (1) Kształt osi łuku (2)
 Zalety łuków (2) Geometria łuku (2) Geometria łuku (1) Kształt osi łuku (1) Kształt osi łuku (2)") Łuki, skepienia Mechanika ogóna Wykład n Pęty o osi zakzywionej. Łuki. Łuk: pęt o osi zakzywionej (w stanie nieodkształconym) w płaszczyźnie działania sił i podpaty na końcach w taki sposó, że podpoy nie
Łuki, skepienia Mechanika ogóna Wykład n Pęty o osi zakzywionej. Łuki. Łuk: pęt o osi zakzywionej (w stanie nieodkształconym) w płaszczyźnie działania sił i podpaty na końcach w taki sposó, że podpoy nie
WYKŁAD 11 OPTYMALIZACJA WIELOKRYTERIALNA
 WYKŁAD OPTYMALIZACJA WIELOKYTEIALNA Wstęp. W wielu pzypadkach pzy pojektowaniu konstukcji technicznych dla okeślenia ich jakości jest niezędne wpowadzenie więcej niż jednego kyteium oceny. F ) { ( ), (
WYKŁAD OPTYMALIZACJA WIELOKYTEIALNA Wstęp. W wielu pzypadkach pzy pojektowaniu konstukcji technicznych dla okeślenia ich jakości jest niezędne wpowadzenie więcej niż jednego kyteium oceny. F ) { ( ), (
BRYŁA SZTYWNA. Zestaw foliogramów. Opracowała Lucja Duda II Liceum Ogólnokształcące w Pabianicach
 BRYŁA SZTYWNA Zestaw fologamów Opacowała Lucja Duda II Lceum Ogólokształcące w Pabacach Pabace 003 Byłą sztywą azywamy cało, któe e defomuje sę pod wpływem sł zewętzych. Poszczególe częśc były sztywej
BRYŁA SZTYWNA Zestaw fologamów Opacowała Lucja Duda II Lceum Ogólokształcące w Pabacach Pabace 003 Byłą sztywą azywamy cało, któe e defomuje sę pod wpływem sł zewętzych. Poszczególe częśc były sztywej
20 ELEKTROSTATYKA. PRAWO COULOMBA.
 Włodzimiez Wolczyński Pawo Coulomba 20 ELEKTROSTATYKA. PRAWO COULOMBA. POLE CENTRALNE I JEDNORODNE Q q = k- stała, dla póżni = 9 10 = 1 4 = 8,9 10 -stała dielektyczna póżni ε względna stała dielektyczna
Włodzimiez Wolczyński Pawo Coulomba 20 ELEKTROSTATYKA. PRAWO COULOMBA. POLE CENTRALNE I JEDNORODNE Q q = k- stała, dla póżni = 9 10 = 1 4 = 8,9 10 -stała dielektyczna póżni ε względna stała dielektyczna
dr inż. Zbigniew Szklarski
 Wkłd 3: Kinemtk d inż. Zbigniew Szklski szkl@gh.edu.pl http://le.uci.gh.edu.pl/z.szklski/ Wstęp Opis uchu KINEMATYKA Dlczego tki uch? Pzczn uchu DYNAMIKA MECHANIKA 08.03.018 Wdził Infomtki, Elektoniki
Wkłd 3: Kinemtk d inż. Zbigniew Szklski szkl@gh.edu.pl http://le.uci.gh.edu.pl/z.szklski/ Wstęp Opis uchu KINEMATYKA Dlczego tki uch? Pzczn uchu DYNAMIKA MECHANIKA 08.03.018 Wdził Infomtki, Elektoniki
Szczególna i ogólna teoria względności (wybrane zagadnienia)
") Szczególna i ogólna teoia względności wybane zagadnienia Maiusz Pzybycień Wydział Fizyki i Infomatyki Stosowanej Akademia Góniczo-Hutnicza Wykład 11 M. Pzybycień WFiIS AGH Szczególna Teoia Względności
Szczególna i ogólna teoia względności wybane zagadnienia Maiusz Pzybycień Wydział Fizyki i Infomatyki Stosowanej Akademia Góniczo-Hutnicza Wykład 11 M. Pzybycień WFiIS AGH Szczególna Teoia Względności
Energia w geometrii Schwarzshilda
 Enegia w geometii Schwazshilda Doga po jakiej pousza się cząstka swobodna pomiędzy dwoma zdazeniami w czasopzestzeni jest taka aby czas zmiezony w układzie cząstki był maksymalny. Rozważmy cząstkę spadającą
Enegia w geometii Schwazshilda Doga po jakiej pousza się cząstka swobodna pomiędzy dwoma zdazeniami w czasopzestzeni jest taka aby czas zmiezony w układzie cząstki był maksymalny. Rozważmy cząstkę spadającą
Ruch punktu materialnego
 WIRTUALNE LABORATORIA FIZYCZNE NOWOCZESNĄ METODĄ NAUCZANIA INNOWACYJNY PROGRAM NAUCZANIA FIZYKI W SZKOŁACH PONADGIMNAZJALNYCH Moduł dydaktyczny: fizyka - infomatyka Ruch punktu mateialnego Elżbieta Kawecka
WIRTUALNE LABORATORIA FIZYCZNE NOWOCZESNĄ METODĄ NAUCZANIA INNOWACYJNY PROGRAM NAUCZANIA FIZYKI W SZKOŁACH PONADGIMNAZJALNYCH Moduł dydaktyczny: fizyka - infomatyka Ruch punktu mateialnego Elżbieta Kawecka
Atom (cząsteczka niepolarna) w polu elektrycznym
 w polu elektrycznym") Dieektyki Dieektyki substancje, w któych nie występują swobodne nośniki ładunku eektycznego (izoatoy). Może być w nich wytwozone i utzymane bez stat enegii poe eektyczne. dieektyk Faaday Wpowadzenie do
Dieektyki Dieektyki substancje, w któych nie występują swobodne nośniki ładunku eektycznego (izoatoy). Może być w nich wytwozone i utzymane bez stat enegii poe eektyczne. dieektyk Faaday Wpowadzenie do
10. Ruch płaski ciała sztywnego
 0. Ruch płaski ciała sztywnego. Pędkość w uchu płaskim Metody wyznaczania pędkości w uchu płaskim y x / chwiowy śodek pędkości. naitycznie Dane:, Szukane: s / /. Na podstawie położenia chwiowego śodka
0. Ruch płaski ciała sztywnego. Pędkość w uchu płaskim Metody wyznaczania pędkości w uchu płaskim y x / chwiowy śodek pędkości. naitycznie Dane:, Szukane: s / /. Na podstawie położenia chwiowego śodka
Modele odpowiedzi do arkusza Próbnej Matury z OPERONEM. Matematyka Poziom rozszerzony
 Modele odpowiedzi do akusza Póbnej Matuy z OPERONEM Matematyka Poziom ozszezony Listopad 00 W kluczu są pezentowane pzykładowe pawidłowe odpowiedzi. Należy ównież uznać odpowiedzi ucznia, jeśli są inaczej
Modele odpowiedzi do akusza Póbnej Matuy z OPERONEM Matematyka Poziom ozszezony Listopad 00 W kluczu są pezentowane pzykładowe pawidłowe odpowiedzi. Należy ównież uznać odpowiedzi ucznia, jeśli są inaczej
MiBM sem. III Zakres materiału wykładu z fizyki
 MiBM sem. III Zakres materiału wykładu z fizyki 1. Dynamika układów punktów materialnych 2. Elementy mechaniki relatywistycznej 3. Podstawowe prawa elektrodynamiki i magnetyzmu 4. Zasady optyki geometrycznej
MiBM sem. III Zakres materiału wykładu z fizyki 1. Dynamika układów punktów materialnych 2. Elementy mechaniki relatywistycznej 3. Podstawowe prawa elektrodynamiki i magnetyzmu 4. Zasady optyki geometrycznej
Wyznaczanie współczynnika sztywności drutu metodą dynamiczną.
 Ćwiczenie M- Wyznaczanie współczynnika sztywności dutu metodą dynamiczną.. Ce ćwiczenia: pomia współczynnika sztywności da stai metodą dgań skętnych.. Pzyządy: dwa kążki metaowe, statyw, dut staowy, stope,
Ćwiczenie M- Wyznaczanie współczynnika sztywności dutu metodą dynamiczną.. Ce ćwiczenia: pomia współczynnika sztywności da stai metodą dgań skętnych.. Pzyządy: dwa kążki metaowe, statyw, dut staowy, stope,