KINEMATYKA. Pojęcia podstawowe
|
|
|
- Radosław Szydłowski
- 8 lat temu
- Przeglądów:
Transkrypt
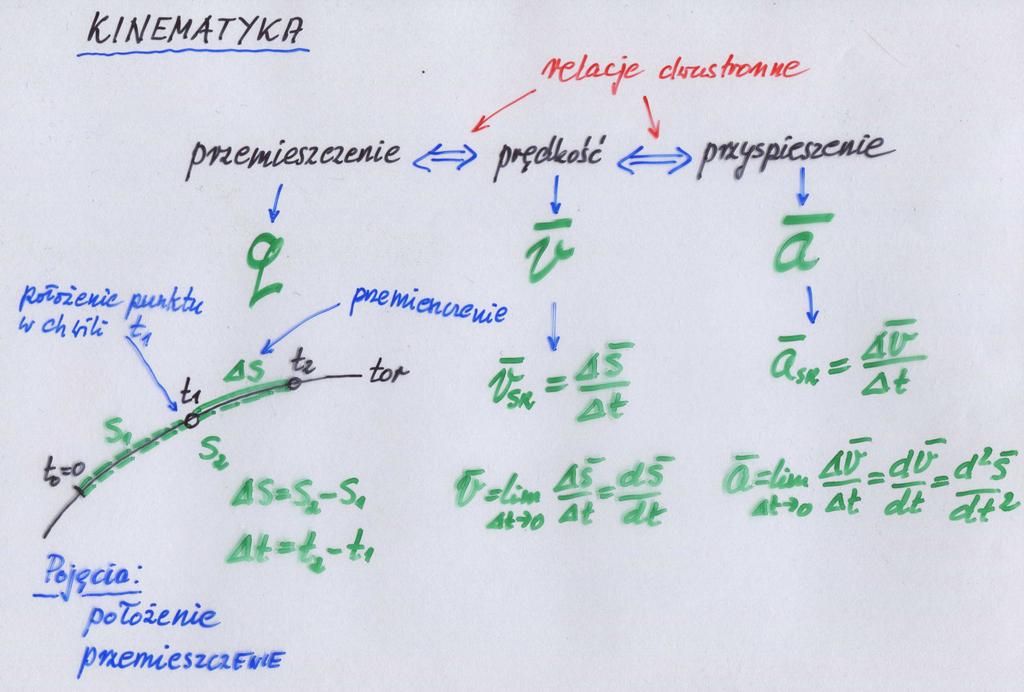
1 KINEMTYK Pojęcia podstawowe Kinematka jest diałem mechaniki ajmującm się badaniem uchu ciał be uwględniania pcn wwołującch ten uch. Jej celem jest opis tego uchu. Ruchem nawam mianę położenia ciała w odniesieniu do innch ciał wanch ciałami odniesienia. Mówiąc o uchu ciała musim awse pamiętać o ciele odniesienia (układie odniesienia nim wiąanm). Pkładowo: samochód Ziemia, Ziemia Słońce, Słońce (układ słonecn) gwiad stałe. Dla óżnch ciał odniesienia inn jest uch. Mówiąc o spocnku ciała mam na mśli spocnek wględem okeślonego ciała odniesienia. Z punktu widenia kinematki a układ odniesienia możem pjąć każde ciało lub układ ciał. W agadnieniach technicnch układem odniesienia jest peważnie Ziemia, taktowana jako układ nieuchom.
2 KINEMTYK punktu (mateialnego) bł stwnej (,, ) Ruch płaski Ruch pestenn obotow postępow dowoln pegub ' ' kulist ' ' postępow dowoln Podiał kinematki e wględów ddaktcnch ' ' ' '
3 Kinematka punktu Pe punkt będiem oumieli ciało, któego uch możem w upełności opisać uchem jednego, dowolnie wbanego punktu tego ciała. a) punkt (uch punktów są ówne) b) nie możem taktować jako punktu mateialnego (uch punktów są óżne) Pkład ciał modelowanch a pomocą: a) punktu, b) bł Położenie punktu w tójwmiaowej pesteni Euklidesa (E 3 ) opisujem a pomocą: 1) wektoa wodącego, 2) współędnch postokątnch, 3) współędnch natualnch, 4) współędnch biegunowch, 5) innch współędnch (np. walcowch).
4 Toem punktu nawam linię, będącą miejscem geometcnm chwilowch położeń pousającego się w pesteni punktu. Położeniem pocątkowm punktu nawam to miejsce na toe, w któm oważan punkt najduje się w chwili t = t 0, gdie t 0 jest chwilą pocątkową. Pędkością punktu jest wielkość, będąca miaą mian jego położenia w jednostce casu. Pspieseniem punktu jest wielkość, będąca miaą mian jego pędkości w jednostce casu. W kinematce bada się ależności pomięd współędnmi punktu, mieniającmi się w casie, a jego pędkością i pspieseniem.
5
6 pis uchu a pomocą wektoa wodącego Wektoem wodącm jest wekto o pocątku w punkcie odniesienia, a końcu w miejscu, gdie w danej chwili najduje się oważan punkt. Roważm tea punkt, któego położenie opisuje wekto wodąc o składowch: gdie t jest casem. = ( t ), = ( t), ( t) =, (3.1) pis uchu punktu a pomocą wektoa wodącego Równania (3.1) nawam ównaniami uchu (RR). Są one jednoceśnie paametcnmi ównaniami tou (PRT). Wstac ównań uchu wugować paamet, któm jest cas t, ab otmać ównanie tou. Położenie. Jeżeli pocątek wektoa wodącego, opisującego położenie punktu, pjmiem w pocątku układu odniesienia, wówcas jego współędne są ówne: = ( t ), Położenie punktu we współędnch wektoowch = ( t), (3.2) = ( t), a wekto wodąc możem apisać = ( t) i + ( t) j + ( t) k. (3.3)
7 Pędkość. Roważm tea dwa położenia punktu, jedno w chwili t i dugie w chwili t +. (t) ( t ) (t+) (t+) s ( ) ( ) ( ) ( ) ( ) t t, t, t = (t+) = ( (t+), (t+), (t+)) Pędkość śednią punktu wnacam ależności ś =. (3.4) Wekto ś ma kieunek i wot godn wektoem Pędkość punktu we współędnch wektoowch, a jego watość ależ od pjętego pediału casu t. b wnacć pędkość chwilową (ścisłą), dla danej chwili casu t, należ oblicć ganicę (3.4), p 0 d = lim = = &. (3.5) 0 dt Wekto pędkości jest awse stcn do tou, w punkcie, w któm najduje się oważan punkt. Podstawiając (3.3) do (3.5) otmujem wiąek pomięd położeniem a pędkością punktu = & = i + j + k, (3.5) gdie składowe wektoa są ówne: = &, = &, = &. (3.7) Składowe wektoa są pędkościami punktu w kieunku osi,, Watość wektoa licm e wou = + +. (3.8) i k Wekto pędkości punktu j to
8 Pspiesenie. Podobnie jak pędkość śednią, możem oblicć śednie pspiesenie punktu, któe jest mianą wektoa pędkości w jednostce casu. blicam je ależności a ś ( t + ) ( t) = =. (3.9) Zaówno watość jak i pośednio kieunek wektoa a ś ależ od pjętego pediału casu t. b oblicć pspiesenie chwilowe (ścisłe) dla casu t pechodim pspieseniem śednim (3.9) do ganic, p 0 d a = lim = = = = 0 dt Podstawiając (3.3) do (3.10) otmujem & &&. (3.10) a = & = a i + a j + a k, (3.11) gdie składowe wektoa a licm e woów a = & = &&, a = & = &&, a = = natomiast watość wektoa pspiesenia a a a a & &&, (3.12) = + +. (3.13) Należ podkeślić, że wekto pspiesenia na ogół nie jest stcn do tou.
Ruch kulisty bryły. Kinematyka
 Ruch kulist bł. Kinematka Ruchem kulistm nawam uch, w casie któego jeden punktów bł jest stale nieuchom. Ruch kulist jest obotem dookoła chwilowej osi obotu (oś ta mienia swoje położenie w casie). a) b)
Ruch kulist bł. Kinematka Ruchem kulistm nawam uch, w casie któego jeden punktów bł jest stale nieuchom. Ruch kulist jest obotem dookoła chwilowej osi obotu (oś ta mienia swoje położenie w casie). a) b)
MECHANIKA III (Mechanika analityczna)
") MECHNIK III (Mechanika analicna) Semes: I, ok akad. 2018/2019 Licba godin: - wkład 15 god., ćwicenia 15 god. *) egamin Wkładając: pof. d hab. inż. Edmund Wibod Kaeda Mechaniki i Mechaoniki p. 101 (sekeaia
MECHNIK III (Mechanika analicna) Semes: I, ok akad. 2018/2019 Licba godin: - wkład 15 god., ćwicenia 15 god. *) egamin Wkładając: pof. d hab. inż. Edmund Wibod Kaeda Mechaniki i Mechaoniki p. 101 (sekeaia
MECHANIKA III (Mechanika analityczna)
") MECHNIK III (Mechanika analicna) Semes: I, ok akad. 2013/2014 Licba godin: - wkład 15 god., ćwicenia 15 god. *) egamin Wkładając: pof. d hab. inż. Edmund Wibod Kaeda Mechaniki i Mechaoniki p. 103 (sekeaia
MECHNIK III (Mechanika analicna) Semes: I, ok akad. 2013/2014 Licba godin: - wkład 15 god., ćwicenia 15 god. *) egamin Wkładając: pof. d hab. inż. Edmund Wibod Kaeda Mechaniki i Mechaoniki p. 103 (sekeaia
Guanajuato, Mexico, August 2015
 Guanajuao Meico Augus 15 W-3 Jaosewic 1 slajdów Dnamika punku maeialnego Dnamika Układ inecjaln Zasad dnamiki: piewsa asada dnamiki duga asada dnamiki pęd ciała popęd sił ecia asada dnamiki pawo akcji
Guanajuao Meico Augus 15 W-3 Jaosewic 1 slajdów Dnamika punku maeialnego Dnamika Układ inecjaln Zasad dnamiki: piewsa asada dnamiki duga asada dnamiki pęd ciała popęd sił ecia asada dnamiki pawo akcji
Ruch kulisty bryły. Kąty Eulera. Precesja regularna
 Ruch kulist brł. Kąt Eulera. Precesja regularna Ruchem kulistm nawam ruch, w casie którego jeden punktów brł jest stale nieruchom. Ruch kulist jest obrotem dookoła chwilowej osi obrotu (oś ta mienia swoje
Ruch kulist brł. Kąt Eulera. Precesja regularna Ruchem kulistm nawam ruch, w casie którego jeden punktów brł jest stale nieruchom. Ruch kulist jest obrotem dookoła chwilowej osi obrotu (oś ta mienia swoje
PRAWA ZACHOWANIA Prawa zachowania najbardziej fundamentalne prawa:
 PRW ZCHOWNI Pawa achowania nabadie fundamentalne pawa: o ewnętne : pawo achowania pędu, pawo achowania momentu pędu, pawo achowania enegii; o wewnętne : pawa achowania np. całkowite licb nukleonów w eakci
PRW ZCHOWNI Pawa achowania nabadie fundamentalne pawa: o ewnętne : pawo achowania pędu, pawo achowania momentu pędu, pawo achowania enegii; o wewnętne : pawa achowania np. całkowite licb nukleonów w eakci
Ruch obrotowy. Wykład 6. Wrocław University of Technology
 Wykład 6 Wocław Univesity of Technology Oboty - definicje Ciało sztywne to ciało któe obaca się w taki sposób, że wszystkie jego części są związane ze sobą dzięki czemu kształt ciała nie ulega zmianie.
Wykład 6 Wocław Univesity of Technology Oboty - definicje Ciało sztywne to ciało któe obaca się w taki sposób, że wszystkie jego części są związane ze sobą dzięki czemu kształt ciała nie ulega zmianie.
TEORIA SPRĘŻYSTOŚCI 10
 W YKŁ ADY Z T EOII S ĘŻYSTOŚCI ZADANIE BOUSSINESQA I FLAMANTA olitechnika onańska Kopac, Kawck, Łodgowski, łotkowiak, Świtek, Tmpe Olga Kopac, Kstof Kawck, Adam Łodgowski, Michał łotkowiak, Agnieska Świtek,
W YKŁ ADY Z T EOII S ĘŻYSTOŚCI ZADANIE BOUSSINESQA I FLAMANTA olitechnika onańska Kopac, Kawck, Łodgowski, łotkowiak, Świtek, Tmpe Olga Kopac, Kstof Kawck, Adam Łodgowski, Michał łotkowiak, Agnieska Świtek,
MECHANIKA OGÓLNA (II)
") MECHNIK GÓLN (II) Semest: II (Mechanika I), III (Mechanika II), ok akademicki 2017/2018 Liczba godzin: sem. II*) - wykład 30 godz., ćwiczenia 30 godz. sem. III*) - wykład 30 godz., ćwiczenia 30 godz. (dla
MECHNIK GÓLN (II) Semest: II (Mechanika I), III (Mechanika II), ok akademicki 2017/2018 Liczba godzin: sem. II*) - wykład 30 godz., ćwiczenia 30 godz. sem. III*) - wykład 30 godz., ćwiczenia 30 godz. (dla
Dynamika punktu materialnego
 Naa -Japonia W-3 (Jaosewic 1 slajdów Dynamika punku maeialnego Dynamika Układ inecjalny Zasady dynamiki: piewsa asada dynamiki duga asada dynamiki; pęd ciała popęd siły ecia asada dynamiki (pawo akcji
Naa -Japonia W-3 (Jaosewic 1 slajdów Dynamika punku maeialnego Dynamika Układ inecjalny Zasady dynamiki: piewsa asada dynamiki duga asada dynamiki; pęd ciała popęd siły ecia asada dynamiki (pawo akcji
Janusz Typek TENSOR MOMENTU BEZWŁADNOŚCI
 Janus Tpek TENSOR MOMENTU BEZWŁADNOŚC Scecn, maec 994 Temat pac: Tenso momentu bewładnośc Cel pac: Oblcene tensoa momentu bewładnośc dla układu składającego sę klku mas punktowch oa jego wkostane do wnacena
Janus Tpek TENSOR MOMENTU BEZWŁADNOŚC Scecn, maec 994 Temat pac: Tenso momentu bewładnośc Cel pac: Oblcene tensoa momentu bewładnośc dla układu składającego sę klku mas punktowch oa jego wkostane do wnacena
23. CAŁKA POWIERZCHNIOWA NIEZORIENTOWANA
 . CAŁKA POWIERZCHNIOWA NIEZORIENTOWANA Płat powiechniow o ównaniach paametcnch: ( ) ( ) ( ) () gdie oba jet obaem eglanm nawam płatem gładkim (płatem eglanm) gd w każdm pnkcie tego płata itnieje płacna
. CAŁKA POWIERZCHNIOWA NIEZORIENTOWANA Płat powiechniow o ównaniach paametcnch: ( ) ( ) ( ) () gdie oba jet obaem eglanm nawam płatem gładkim (płatem eglanm) gd w każdm pnkcie tego płata itnieje płacna
, q3) współrzędnych kartezjańskich o równaniach:
 współrzędnych kartezjańskich o równaniach:") Kimaka puku w współędch kwoliiowch i wkoowch aual biguow walcow (clidc) kulis (sfc) Współędmi kwoliiowmi mogą bć dowol fukcj ( q 1, q, q3) współędch kajańskich o ówaiach: q1 q1(,, ) q q (,, ) q q,, ),
Kimaka puku w współędch kwoliiowch i wkoowch aual biguow walcow (clidc) kulis (sfc) Współędmi kwoliiowmi mogą bć dowol fukcj ( q 1, q, q3) współędch kajańskich o ówaiach: q1 q1(,, ) q q (,, ) q q,, ),
A r promień wektor. r = f 1 (t), φ = f 2 (t) y r φ. x, = 0
, φ = f 2 (t) y r φ. x, = 0") 1 Ruchem cił wm chodącą w csie mię jego położei wględem iego cił, któe umowie pjmujem ieuchome. Rówi uchu puktu we współędch postokątch l pomień wekto W ppdku gd pukt pous się, cli miei upłwem csu swoje
1 Ruchem cił wm chodącą w csie mię jego położei wględem iego cił, któe umowie pjmujem ieuchome. Rówi uchu puktu we współędch postokątch l pomień wekto W ppdku gd pukt pous się, cli miei upłwem csu swoje
Oddziaływania fundamentalne
 Oddziaływania fundamentalne Siła gawitacji (siła powszechnego ciążenia, oddziaływanie gawitacyjne) powoduje spadanie ciał i ządzi uchem ciał niebieskich Księżyc Ziemia Słońce Newton Dotyczy ciał posiadających
Oddziaływania fundamentalne Siła gawitacji (siła powszechnego ciążenia, oddziaływanie gawitacyjne) powoduje spadanie ciał i ządzi uchem ciał niebieskich Księżyc Ziemia Słońce Newton Dotyczy ciał posiadających
Ruch dwu i trójwymiarowy
 Wkład z fizki. Piot Posmkiewicz 1 W Y K Ł A D Ruch dwu i tójwmiaow 3-1 Wekto pzemieszczenia. JeŜeli uch odbwa się w dwu lub tzech wmiaach, to pzemieszczenie ma okeśloną zaówno watość, jak i kieunek w pzestzeni.
Wkład z fizki. Piot Posmkiewicz 1 W Y K Ł A D Ruch dwu i tójwmiaow 3-1 Wekto pzemieszczenia. JeŜeli uch odbwa się w dwu lub tzech wmiaach, to pzemieszczenie ma okeśloną zaówno watość, jak i kieunek w pzestzeni.
11. DYNAMIKA RUCHU DRGAJĄCEGO
 11. DYNAMIKA RUCHU DRGAJĄCEGO Ruchem dgającym nazywamy uch, któy powtaza się peiodycznie w takcie jego twania w czasie i zachodzi wokół położenia ównowagi. Zespół obiektów fizycznych zapewniający wytwozenie
11. DYNAMIKA RUCHU DRGAJĄCEGO Ruchem dgającym nazywamy uch, któy powtaza się peiodycznie w takcie jego twania w czasie i zachodzi wokół położenia ównowagi. Zespół obiektów fizycznych zapewniający wytwozenie
I. Rachunek wektorowy i jego zastosowanie w fizyce.
 Blok 1: Rachunek wektorow i jego astosowanie w fice Podstawowe wielkości ficne w kinematce Opis ruchu w różnch układach odniesienia Ruch wględn I Rachunek wektorow i jego astosowanie w fice Wsstkie wielkości
Blok 1: Rachunek wektorow i jego astosowanie w fice Podstawowe wielkości ficne w kinematce Opis ruchu w różnch układach odniesienia Ruch wględn I Rachunek wektorow i jego astosowanie w fice Wsstkie wielkości
Opis ruchu we współrzędnych prostokątnych (kartezjańskich)
") Opis ruchu we współrędch prosokąch (karejańskich) Opis ruchu we współrędch prosokąch jes podob do opisu a pomocą wekora wodącego, kórego pocąek leż w pocąku układu odiesieia. Położeie. Położeie puku A
Opis ruchu we współrędch prosokąch (karejańskich) Opis ruchu we współrędch prosokąch jes podob do opisu a pomocą wekora wodącego, kórego pocąek leż w pocąku układu odiesieia. Położeie. Położeie puku A
Grzegorz Kornaś. Powtórka z fizyki
 Gzegoz Konaś Powtóka z fizyki - dla uczniów gimnazjów, któzy chcą wiedzieć to co tzeba, a nawet więcej, - dla uczniów liceów, któzy chcą powtózyć to co tzeba, aby zozumieć więcej, - dla wszystkich, któzy
Gzegoz Konaś Powtóka z fizyki - dla uczniów gimnazjów, któzy chcą wiedzieć to co tzeba, a nawet więcej, - dla uczniów liceów, któzy chcą powtózyć to co tzeba, aby zozumieć więcej, - dla wszystkich, któzy
Teoria Pola Elektromagnetycznego
 Teoia Pola Elektomagnetcnego Wkład 1 Pojęcia anali wektoowej 5.0.006 Stefan Filipowic Wstęp Teścią niniejsego wkładu jest makoskopowa teoia pola elektomagnetcnego. Podstaw tej teoii ostał sfomułowane i
Teoia Pola Elektomagnetcnego Wkład 1 Pojęcia anali wektoowej 5.0.006 Stefan Filipowic Wstęp Teścią niniejsego wkładu jest makoskopowa teoia pola elektomagnetcnego. Podstaw tej teoii ostał sfomułowane i
WYKŁAD 1. W przypadku zbiornika zawierającego gaz, stan układu jako całości jest opisany przez: temperaturę, ciśnienie i objętość.
 WYKŁAD 1 Pzedmiot badań temodynamiki. Jeśli chcemy opisać układ złożony z N cząstek, to możemy w amach mechaniki nieelatywistycznej dla każdej cząstki napisać ównanie uchu: 2 d i mi = Fi, z + Fi, j, i,
WYKŁAD 1 Pzedmiot badań temodynamiki. Jeśli chcemy opisać układ złożony z N cząstek, to możemy w amach mechaniki nieelatywistycznej dla każdej cząstki napisać ównanie uchu: 2 d i mi = Fi, z + Fi, j, i,
P K. Położenie punktu na powierzchni kuli określamy w tym układzie poprzez podanie dwóch kątów (, ).
.") Materiał ddaktcne Geodeja geometrcna Marcin Ligas, Katedra Geomatki, Wdiał Geodeji Górnicej i Inżnierii Środowiska UKŁADY WSPÓŁZĘDNYCH NA KULI Pierwsm prbliżeniem kstałtu Ziemi (ocwiście po latach płaskich
Materiał ddaktcne Geodeja geometrcna Marcin Ligas, Katedra Geomatki, Wdiał Geodeji Górnicej i Inżnierii Środowiska UKŁADY WSPÓŁZĘDNYCH NA KULI Pierwsm prbliżeniem kstałtu Ziemi (ocwiście po latach płaskich
Wykład 4. Zasada zachowania energii. Siły zachowawcze i niezachowawcze
 Wład 4 Zasada achowania enegii Sił achowawce i nieachowawce Wsstie istniejące sił możem podielić na sił achowawce i sił nie achowawce. Siła jest achowawca jeżeli paca tóą wonuję ta siła nad puntem mateialnm
Wład 4 Zasada achowania enegii Sił achowawce i nieachowawce Wsstie istniejące sił możem podielić na sił achowawce i sił nie achowawce. Siła jest achowawca jeżeli paca tóą wonuję ta siła nad puntem mateialnm
Pola siłowe i ich charakterystyka
 W-6 (Jaosewic) 10 slajdów Pola siłowe i ich chaaktestka Pola siłowe: pojęcie i odaje pól siłowch, wielkości chaakteujące pola siłowe Pola achowawce Pole gawitacjne: uch w polu gawitacjnm 3/10 L.R. Jaosewic
W-6 (Jaosewic) 10 slajdów Pola siłowe i ich chaaktestka Pola siłowe: pojęcie i odaje pól siłowch, wielkości chaakteujące pola siłowe Pola achowawce Pole gawitacjne: uch w polu gawitacjnm 3/10 L.R. Jaosewic
KINEMATYKA. Kinematyka jest częścią mechaniki opisującą ruch obiektów bez wchodzenia w
 KINEMATYKA Kinematka jet częścią mechaniki opiującą uch iektów bez wchodzenia w pzczn wtępowania uchu Ruch jet względn i zawze jet opiwan w okeślonm układzie wpółzędnch nazwanm układem odnieienia Układ
KINEMATYKA Kinematka jet częścią mechaniki opiującą uch iektów bez wchodzenia w pzczn wtępowania uchu Ruch jet względn i zawze jet opiwan w okeślonm układzie wpółzędnch nazwanm układem odnieienia Układ
Coba, Mexico, August 2015
 Coba, Meico, August 015 W-6 (Jaosewic) 10 sladów Pola siłowe i ich chaaktestka Pola siłowe: poęcie i odae pól siłowch, wielkości chaakteuące pola siłowe Pola achowawce Pole gawitacne: uch w polu gawitacnm
Coba, Meico, August 015 W-6 (Jaosewic) 10 sladów Pola siłowe i ich chaaktestka Pola siłowe: poęcie i odae pól siłowch, wielkości chaakteuące pola siłowe Pola achowawce Pole gawitacne: uch w polu gawitacnm
Treść programu (sem. I)
") 7-9-7 FIZYKA konsultcje: śod 5-7 Josłw Rutkowski pok. 63/S tel. 6 83 97 8 Teść pogmu (sem. I) Element chunku wektoowego. Ruch postoliniow. Pojęcie pochodnej. Ruch w kilku wmich. Mechnik ównni uchu(cłkownie).
7-9-7 FIZYKA konsultcje: śod 5-7 Josłw Rutkowski pok. 63/S tel. 6 83 97 8 Teść pogmu (sem. I) Element chunku wektoowego. Ruch postoliniow. Pojęcie pochodnej. Ruch w kilku wmich. Mechnik ównni uchu(cłkownie).
Rozdział 9. Baza Jordana
 Rodiał 9 Baa Jordana Niech X będie n wmiarową prestrenią wektorową nad ciałem F = R lub F = C Roważm dowoln endomorfim f : X X Wiem, że postać macier endomorfimu ależ od wboru ba w prestreni X Wiem również,
Rodiał 9 Baa Jordana Niech X będie n wmiarową prestrenią wektorową nad ciałem F = R lub F = C Roważm dowoln endomorfim f : X X Wiem, że postać macier endomorfimu ależ od wboru ba w prestreni X Wiem również,
cz.2 Dr inż. Zbigniew Szklarski Katedra Elektroniki, paw. C-1, pok.321
 Wkład 8: Brła stwna c. Dr inż. Zbigniew Sklarski Katedra Elektroniki, paw. C-, pok.3 skla@agh.edu.pl http://laer.uci.agh.edu.pl/z.sklarski/ 05.04.08 Wdiał nformatki, Elektroniki i Telekomunikacji - Teleinformatka
Wkład 8: Brła stwna c. Dr inż. Zbigniew Sklarski Katedra Elektroniki, paw. C-, pok.3 skla@agh.edu.pl http://laer.uci.agh.edu.pl/z.sklarski/ 05.04.08 Wdiał nformatki, Elektroniki i Telekomunikacji - Teleinformatka
Materiały pomocnicze dla studentów I roku do wykładu Wstęp do fizyki I Wykład 1
 Mateiał pomocnicze dla studentów I oku do wkładu Wstęp do fizki I Wkład 1 I. Skala i Wekto. Skala: Jest to wielkość, któą można jednoznacznie okeślić za pomocą liczb i jednostek; a więc mająca jednie watość,
Mateiał pomocnicze dla studentów I oku do wkładu Wstęp do fizki I Wkład 1 I. Skala i Wekto. Skala: Jest to wielkość, któą można jednoznacznie okeślić za pomocą liczb i jednostek; a więc mająca jednie watość,
cz. 2. Dr inż. Zbigniew Szklarski Katedra Elektroniki, paw. C-1, pok.321
 Wkład 7: Bła stwna c.. D nż. Zbgnew Sklask Kateda Elektonk, paw. C-1, pok.1 skla@agh.edu.pl http://lae.uc.agh.edu.pl/z.sklask/..17 Wdał nfoatk, Elektonk Telekounkacj - Telenfoatka 1 6..17 Wdał nfoatk,
Wkład 7: Bła stwna c.. D nż. Zbgnew Sklask Kateda Elektonk, paw. C-1, pok.1 skla@agh.edu.pl http://lae.uc.agh.edu.pl/z.sklask/..17 Wdał nfoatk, Elektonk Telekounkacj - Telenfoatka 1 6..17 Wdał nfoatk,
Pręty silnie zakrzywione 1
 Pęt silnie akwione. DEFIICJ Pętem silnie akwionm nawam pęt, któego oś jest płaską kwą, a stosunek wmiau pekoju popecnego (leżącego w płascźnie kwin) do pomienia kwin osi ciężkości () pęta spełnia waunek.
Pęt silnie akwione. DEFIICJ Pętem silnie akwionm nawam pęt, któego oś jest płaską kwą, a stosunek wmiau pekoju popecnego (leżącego w płascźnie kwin) do pomienia kwin osi ciężkości () pęta spełnia waunek.
Postać Jordana macierzy
 Rodiał 8 Postać Jordana macier 8.1. Macier Jordana Niech F = R lub F = C. Macier J r () F r r postaci 1. 1... J r () =..........,.... 1 gdie F, nawam klatką Jordana stopnia r. Ocwiście J 1 () = [. Definicja
Rodiał 8 Postać Jordana macier 8.1. Macier Jordana Niech F = R lub F = C. Macier J r () F r r postaci 1. 1... J r () =..........,.... 1 gdie F, nawam klatką Jordana stopnia r. Ocwiście J 1 () = [. Definicja
II.6. Wahadło proste.
 II.6. Wahadło poste. Pzez wahadło poste ozumiemy uch oscylacyjny punktu mateialnego o masie m po dolnym łuku okęgu o pomieniu, w stałym polu gawitacyjnym g = constant. Fig. II.6.1. ozkład wektoa g pzyśpieszenia
II.6. Wahadło poste. Pzez wahadło poste ozumiemy uch oscylacyjny punktu mateialnego o masie m po dolnym łuku okęgu o pomieniu, w stałym polu gawitacyjnym g = constant. Fig. II.6.1. ozkład wektoa g pzyśpieszenia
Pęd, d zasada zac zasad a zac owan owan a p a p du Zgod Zg n od ie n ie z d r d u r g u im g pr p a r wem e N ew e tona ton :
 Mechanika ogólna Wykład n 13 Zasady zachowania w dynamice. Dynamika były sztywnej. Dynamika układu punktów mateialnych. 1 Zasady zachowania w dynamice Zasada: zachowania pędu; zachowania momentu pędu (kętu);
Mechanika ogólna Wykład n 13 Zasady zachowania w dynamice. Dynamika były sztywnej. Dynamika układu punktów mateialnych. 1 Zasady zachowania w dynamice Zasada: zachowania pędu; zachowania momentu pędu (kętu);
ELEMENTY MECHANIKI ANALITYCZNEJ
 ELEMENTY MECHANIKI ANALITYCZNEJ Roatuem układ o welu tonach wobod, n. układ łożon unktów matealnch. Na układ mogą bć nałożone wę. P unkt matealn o mae m Układ wobodn kładaąc ę unktów matealnch Wółędne
ELEMENTY MECHANIKI ANALITYCZNEJ Roatuem układ o welu tonach wobod, n. układ łożon unktów matealnch. Na układ mogą bć nałożone wę. P unkt matealn o mae m Układ wobodn kładaąc ę unktów matealnch Wółędne
cz.1 Dr inż. Zbigniew Szklarski Katedra Elektroniki, paw. C-1, pok.321
 Wkład 8: Bła stwna c. D nż. Zbgnew Sklask Kateda Elektonk, paw. C-, pok. skla@agh.edu.pl http://lae.uc.agh.edu.pl/z.sklask/ 8-- Wdał nfoatk, Elektonk Telekounkacj - Telenfoatka Śodek as/ śodek cężkośc
Wkład 8: Bła stwna c. D nż. Zbgnew Sklask Kateda Elektonk, paw. C-, pok. skla@agh.edu.pl http://lae.uc.agh.edu.pl/z.sklask/ 8-- Wdał nfoatk, Elektonk Telekounkacj - Telenfoatka Śodek as/ śodek cężkośc
KURS GEOMETRIA ANALITYCZNA
 KURS GEOMETRIA ANALITYCZNA Lekcja 2 Działania na wektoach w układzie współzędnych. ZADANIE DOMOWE www.etapez.pl Stona 1 Część 1: TEST Zaznacz popawną odpowiedź (tylko jedna jest pawdziwa). Pytanie 1 Któe
KURS GEOMETRIA ANALITYCZNA Lekcja 2 Działania na wektoach w układzie współzędnych. ZADANIE DOMOWE www.etapez.pl Stona 1 Część 1: TEST Zaznacz popawną odpowiedź (tylko jedna jest pawdziwa). Pytanie 1 Któe
00502 Podstawy kinematyki D Część 2 Iloczyn wektorowy i skalarny. Wektorowy opis ruchu. Względność ruchu. Prędkość w ruchu prostoliniowym.
 1 00502 Kinematyka D Dane osobowe właściciela akusza 00502 Podstawy kinematyki D Część 2 Iloczyn wektoowy i skalany. Wektoowy opis uchu. Względność uchu. Pędkość w uchu postoliniowym. Instukcja dla zdającego
1 00502 Kinematyka D Dane osobowe właściciela akusza 00502 Podstawy kinematyki D Część 2 Iloczyn wektoowy i skalany. Wektoowy opis uchu. Względność uchu. Pędkość w uchu postoliniowym. Instukcja dla zdającego
ZŁOŻONE RUCHY OSI OBROTOWYCH STEROWANYCH NUMERYCZNIE
 KOMISJA BUDOWY MASZYN PAN ODDZIAŁ W POZNANIU Vol. 6 nr Archiwum Technologii Masn i Automatacji 6 ROMAN STANIEK * ZŁOŻONE RUCHY OSI OBROTOWYCH STEROWANYCH NUMERYCZNIE W artkule predstawiono ależności matematcne
KOMISJA BUDOWY MASZYN PAN ODDZIAŁ W POZNANIU Vol. 6 nr Archiwum Technologii Masn i Automatacji 6 ROMAN STANIEK * ZŁOŻONE RUCHY OSI OBROTOWYCH STEROWANYCH NUMERYCZNIE W artkule predstawiono ależności matematcne
Energia kinetyczna i praca. Energia potencjalna
 negia kinetyczna i paca. negia potencjalna Wykład 4 Wocław Univesity of Technology 1 NRGIA KINTYCZNA I PRACA 5.XI.011 Paca Kto wykonał większą pacę? Hossein Rezazadeh Olimpiada w Atenach 004 WR Podzut
negia kinetyczna i paca. negia potencjalna Wykład 4 Wocław Univesity of Technology 1 NRGIA KINTYCZNA I PRACA 5.XI.011 Paca Kto wykonał większą pacę? Hossein Rezazadeh Olimpiada w Atenach 004 WR Podzut
napór cieczy - wypadkowy ( hydrostatyczny )
") 5. apór hdrostatcn i równowaga ciał płwającch Płn najdując się w stanie równowagi oddiałwuje na ścian ogranicające ropatrwaną jego objętość i sił te nawane są naporami hdrostatcnmi. Omawiana problematka
5. apór hdrostatcn i równowaga ciał płwającch Płn najdując się w stanie równowagi oddiałwuje na ścian ogranicające ropatrwaną jego objętość i sił te nawane są naporami hdrostatcnmi. Omawiana problematka
J. Szantyr - Wykład 7 Ruch ogólny elementu płynu
 J. Santr - Wkład 7 Rch ogóln element płn Rch ogóln ciała stwnego można predstawić jako smę premiescenia liniowego i obrot. Ponieważ płn nie mają stwności postaciowej, w rch płn dochodi dodatkowo do odkstałcenia
J. Santr - Wkład 7 Rch ogóln element płn Rch ogóln ciała stwnego można predstawić jako smę premiescenia liniowego i obrot. Ponieważ płn nie mają stwności postaciowej, w rch płn dochodi dodatkowo do odkstałcenia
4.2.1. Środek ciężkości bryły jednorodnej
 4..1. Środek ciężkości rł jednorodnej Brłą jednorodną nawam ciało materialne, w którm masa jest romiescona równomiernie w całej jego ojętości. Dla takic ciał arówno gęstość, jak i ciężar właściw są wielkościami
4..1. Środek ciężkości rł jednorodnej Brłą jednorodną nawam ciało materialne, w którm masa jest romiescona równomiernie w całej jego ojętości. Dla takic ciał arówno gęstość, jak i ciężar właściw są wielkościami
SK-7 Wprowadzenie do metody wektorów przestrzennych SK-8 Wektorowy model silnika indukcyjnego, klatkowego
 Ćwiczenia: SK-7 Wpowadzenie do metody wektoów pzetzennych SK-8 Wektoowy model ilnika indukcyjnego, klatkowego Wpowadzenie teoetyczne Wekto pzetzenny definicja i poawowe zależności. Dowolne wielkości kalane,
Ćwiczenia: SK-7 Wpowadzenie do metody wektoów pzetzennych SK-8 Wektoowy model ilnika indukcyjnego, klatkowego Wpowadzenie teoetyczne Wekto pzetzenny definicja i poawowe zależności. Dowolne wielkości kalane,
Siła. Zasady dynamiki
 Siła. Zasady dynaiki Siła jest wielkością wektoową. Posiada okeśloną watość, kieunek i zwot. Jednostką siły jest niuton (N). 1N=1 k s 2 Pzedstawienie aficzne A Siła pzyłożona jest do ciała w punkcie A,
Siła. Zasady dynaiki Siła jest wielkością wektoową. Posiada okeśloną watość, kieunek i zwot. Jednostką siły jest niuton (N). 1N=1 k s 2 Pzedstawienie aficzne A Siła pzyłożona jest do ciała w punkcie A,
1. REDUKCJA DOWOLNYCH UKŁADÓW SIŁ. Redukcja płaskiego układu sił
 . REDUKCJA DOWOLNYCH UKŁADÓW IŁ Redukcja płaskiego układu sił Zadanie. Znaleźć wartość licbową i równanie linii diałania wpadkowej cterech sił predstawionch na rsunku. Wartości licbowe sił są następujące:
. REDUKCJA DOWOLNYCH UKŁADÓW IŁ Redukcja płaskiego układu sił Zadanie. Znaleźć wartość licbową i równanie linii diałania wpadkowej cterech sił predstawionch na rsunku. Wartości licbowe sił są następujące:
Maria Dems. T. Koter, E. Jezierski, W. Paszek
 Sany niesalone masyn synchonicnych Maia Dems. Koe, E. Jeieski, W. Pasek Zwacie aowe pąnicy synchonicnej San wacia salonego, wany akże waciem nomalnym lb pomiaowym yskje się pe wacie acisków wonika (j (sojana
Sany niesalone masyn synchonicnych Maia Dems. Koe, E. Jeieski, W. Pasek Zwacie aowe pąnicy synchonicnej San wacia salonego, wany akże waciem nomalnym lb pomiaowym yskje się pe wacie acisków wonika (j (sojana
1. Podstawy rachunku wektorowego
 1 Postaw rachunku wektorowego Wektor Wektor est wielkością efiniowaną pre ługość (mouł) kierunek iałania ora wrot Dwa wektor o tm samm moule kierunku i wrocie są sobie równe Wektor presunięt równolegle
1 Postaw rachunku wektorowego Wektor Wektor est wielkością efiniowaną pre ługość (mouł) kierunek iałania ora wrot Dwa wektor o tm samm moule kierunku i wrocie są sobie równe Wektor presunięt równolegle
DODATEK 6. Pole elektryczne nieskończenie długiego walca z równomiernie rozłożonym w nim ładunkiem objętościowym. Φ = = = = = π
 DODATEK 6 Pole elektycne nieskońcenie długiego walca ównomienie ołożonym w nim ładunkiem objętościowym Nieskońcenie długi walec o pomieniu jest ównomienie naładowany ładunkiem objętościowym o stałej gęstości
DODATEK 6 Pole elektycne nieskońcenie długiego walca ównomienie ołożonym w nim ładunkiem objętościowym Nieskońcenie długi walec o pomieniu jest ównomienie naładowany ładunkiem objętościowym o stałej gęstości
,..., u x n. , 2 u x 2 1
 . Równania różnickowe cąstkowe Definicja. Równaniem różnickowm cąstkowm (rrc) nawam równanie różnickowe, w którm wstępuje funkcja niewiadoma dwóch lub więcej miennch i jej pochodne cąstkowe. Ogólna postać
. Równania różnickowe cąstkowe Definicja. Równaniem różnickowm cąstkowm (rrc) nawam równanie różnickowe, w którm wstępuje funkcja niewiadoma dwóch lub więcej miennch i jej pochodne cąstkowe. Ogólna postać
1. Ciało sztywne, na które nie działa moment siły pozostaje w spoczynku lub porusza się ruchem obrotowym jednostajnym.
 Wykład 3. Zasada zachowania momentu pędu. Dynamika punktu mateialnego i były sztywnej. Ruch obotowy i postępowy Większość ciał w pzyodzie to nie punkty mateialne ale ozciągłe ciała sztywne tj. obiekty,
Wykład 3. Zasada zachowania momentu pędu. Dynamika punktu mateialnego i były sztywnej. Ruch obotowy i postępowy Większość ciał w pzyodzie to nie punkty mateialne ale ozciągłe ciała sztywne tj. obiekty,
EPR. W -1/2 =-1/2 gµ B B
 Hamiltonian spinow Elektronow reonans paramanetcn jest wiąan absorpcją pola wsokiej cęstotliwości, która towars mianie orientacji spin w ewnętrnm polu manetcnm. Niesparowane spinowe moment manetcne µ s
Hamiltonian spinow Elektronow reonans paramanetcn jest wiąan absorpcją pola wsokiej cęstotliwości, która towars mianie orientacji spin w ewnętrnm polu manetcnm. Niesparowane spinowe moment manetcne µ s
Wykład: praca siły, pojęcie energii potencjalnej. Zasada zachowania energii.
 Wykład: paca siły, pojęcie enegii potencjalnej. Zasada zachowania enegii. Uwaga: Obazki w tym steszczeniu znajdują się stonie www: http://www.whfeeman.com/tiple/content /instucto/inde.htm Pytanie: Co to
Wykład: paca siły, pojęcie enegii potencjalnej. Zasada zachowania enegii. Uwaga: Obazki w tym steszczeniu znajdują się stonie www: http://www.whfeeman.com/tiple/content /instucto/inde.htm Pytanie: Co to
Wyznaczanie reakcji dynamicznych oraz wyważanie ciała w ruchu obrotowym wokół stałej osi 8
 Wnacanie reakcji dnaicnch ora wważanie ciała w ruchu oroow wokół sałej osi 8 Wprowadenie Jeśli dowolne ciało swne o asie jes w ruchu oroow wokół osi, o na podporach powsają reakcje A i B. Składowe ch reakcji
Wnacanie reakcji dnaicnch ora wważanie ciała w ruchu oroow wokół sałej osi 8 Wprowadenie Jeśli dowolne ciało swne o asie jes w ruchu oroow wokół osi, o na podporach powsają reakcje A i B. Składowe ch reakcji
GRAWITACJA. przyciągają się wzajemnie siłą proporcjonalną do iloczynu ich mas i odwrotnie proporcjonalną do kwadratu ich odległości r.
 GRAWITACJA Pawo powszechnego ciążenia (pawo gawitacji) Dwa punkty mateialne o masach m 1 i m pzyciągają się wzajemnie siłą popocjonalną do iloczynu ich mas i odwotnie popocjonalną do kwadatu ich odległości.
GRAWITACJA Pawo powszechnego ciążenia (pawo gawitacji) Dwa punkty mateialne o masach m 1 i m pzyciągają się wzajemnie siłą popocjonalną do iloczynu ich mas i odwotnie popocjonalną do kwadatu ich odległości.
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
J. Szantyr Wykład 11 Równanie Naviera-Stokesa
 J. Sant Wkład Równanie Naviea-Stokesa Podstawienie ależności wnikającch model łn Newtona do ównania achowania ęd daje ównanie nane jako ównanie Naviea-Stokesa. Geoge Stokes 89 903 Clade Navie 785-836 Naviea-Stokesa.
J. Sant Wkład Równanie Naviea-Stokesa Podstawienie ależności wnikającch model łn Newtona do ównania achowania ęd daje ównanie nane jako ównanie Naviea-Stokesa. Geoge Stokes 89 903 Clade Navie 785-836 Naviea-Stokesa.
Energia kinetyczna i praca. Energia potencjalna
 Enegia kinetyczna i paca. Enegia potencjalna Wykład 4 Wocław Uniesity of Technology 1 5-XI-011 5.XI.011 Paca Kto wykonał większą pacę? Hossein Rezazadeh Olimpiada w Atenach 004 WR Podzut 63 kg Paul Andeson
Enegia kinetyczna i paca. Enegia potencjalna Wykład 4 Wocław Uniesity of Technology 1 5-XI-011 5.XI.011 Paca Kto wykonał większą pacę? Hossein Rezazadeh Olimpiada w Atenach 004 WR Podzut 63 kg Paul Andeson
Atom wodoru. -13.6eV. Seria Lymana. od 91 nm to 122 nm. n = 2, 3,... Seria Paschena n = 4, 5,... n = 5, 6,... Seria Bracketta.
 Atom wodou -3.6eV Seia Lmana n 2, 3,... od 9 nm to 22 nm Seia Paschena n 4, 5,... Seia Backetta n 5, 6,... Ogólnie: n 2, 2, 3; n (n 2 + ), (n 2 + 2),... Atom wodou We współędnch sfecnch: metoda odielania
Atom wodou -3.6eV Seia Lmana n 2, 3,... od 9 nm to 22 nm Seia Paschena n 4, 5,... Seia Backetta n 5, 6,... Ogólnie: n 2, 2, 3; n (n 2 + ), (n 2 + 2),... Atom wodou We współędnch sfecnch: metoda odielania
WPROWADZENIE. Czym jest fizyka?
 WPROWADZENIE Czym jest fizyka? Fizyka odgywa dziś olę tego co dawniej nazywano filozofią pzyody i z czego zodziły się współczesne nauki pzyodnicze. Można powiedzieć, że fizyka stanowi system podstawowych
WPROWADZENIE Czym jest fizyka? Fizyka odgywa dziś olę tego co dawniej nazywano filozofią pzyody i z czego zodziły się współczesne nauki pzyodnicze. Można powiedzieć, że fizyka stanowi system podstawowych
Przykład 6.3. Uogólnione prawo Hooke a
 Prkład 6 Uogónione prawo Hooke a Zwiąki międ odkstałceniami i naprężeniami w prpadku ciała iotropowego opisuje uogónione prawo Hooke a: ] ] ] a Rowiąując równania a wgędem naprężeń otrmujem wiąki: b W
Prkład 6 Uogónione prawo Hooke a Zwiąki międ odkstałceniami i naprężeniami w prpadku ciała iotropowego opisuje uogónione prawo Hooke a: ] ] ] a Rowiąując równania a wgędem naprężeń otrmujem wiąki: b W
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
Mając więc bardzo uproszczone wyobraŝenie atomu, jako obiektu o symetrii sferycznej, moŝemy go naszkicować w następujący sposób: m
 Wpowdenie Skl pestenn jwisk ficnch Tpowm oiektem pestennm dosteglnm jesce gołm okiem jest włos ludki. Jego śednic to około 0.1 mm1. 10-4 m100. 10-6 m100µm. Oko ludkie jest w stnie uwŝć pedmiot o omie około
Wpowdenie Skl pestenn jwisk ficnch Tpowm oiektem pestennm dosteglnm jesce gołm okiem jest włos ludki. Jego śednic to około 0.1 mm1. 10-4 m100. 10-6 m100µm. Oko ludkie jest w stnie uwŝć pedmiot o omie około
Prędkość i przyspieszenie punktu bryły w ruchu kulistym
 Pędkość i pzyspieszenie punktu były w uchu kulistym Położenie dowolnego punktu były okeślmy z pomocą wekto (o stłej długości) któego współzędne możemy podć w nieuchomym ukłdzie osi x y z ) z b) ζ ζ η z
Pędkość i pzyspieszenie punktu były w uchu kulistym Położenie dowolnego punktu były okeślmy z pomocą wekto (o stłej długości) któego współzędne możemy podć w nieuchomym ukłdzie osi x y z ) z b) ζ ζ η z
dr inż. Zbigniew Szklarski
 ykład 5: Paca i enegia d inż. Zbigniew Szklaski szkla@agh.edu.pl http://laye.uci.agh.edu.pl/z.szklaski/ Enegia a paca Enegia jest to wielkość skalana, okeślająca stan, w jakim znajduje się jedno lub wiele
ykład 5: Paca i enegia d inż. Zbigniew Szklaski szkla@agh.edu.pl http://laye.uci.agh.edu.pl/z.szklaski/ Enegia a paca Enegia jest to wielkość skalana, okeślająca stan, w jakim znajduje się jedno lub wiele
Siły oporu prędkość graniczna w spadku swobodnym
 FZYKA Wykład echanika: Pojęcia podstawowe dynamika i punktu histoia mateialnego (V) Siły opou pędkość ganiczna w spadku swobodnym Układy Pojęcia nieinecjalne podstawowe () i histoia Siły w układach nieinecjalnych
FZYKA Wykład echanika: Pojęcia podstawowe dynamika i punktu histoia mateialnego (V) Siły opou pędkość ganiczna w spadku swobodnym Układy Pojęcia nieinecjalne podstawowe () i histoia Siły w układach nieinecjalnych
Siła tarcia. Tarcie jest zawsze przeciwnie skierowane do kierunku ruchu (do prędkości). R. D. Knight, Physics for scientists and engineers
. R. D. Knight, Physics for scientists and engineers") Siła tacia Tacie jest zawsze pzeciwnie skieowane do kieunku uchu (do pędkości). P. G. Hewitt, Fizyka wokół nas, PWN R. D. Knight, Physics fo scientists and enginees Symulacja molekulanego modelu tacia
Siła tacia Tacie jest zawsze pzeciwnie skieowane do kieunku uchu (do pędkości). P. G. Hewitt, Fizyka wokół nas, PWN R. D. Knight, Physics fo scientists and enginees Symulacja molekulanego modelu tacia
WYBRANE ZAGADNIENIA ODKSZTAŁCEŃ NAPĘDOWEGO KOŁA PNEUMATYCZNEGO CIĄGNIKA ROLNICZEGO. Bronisław Kolator
 MOTROL, 26, 8, 118 124 WBRANE ZAGADNIENIA ODKSZTAŁCEŃ NAPĘDOWEGO KOŁA PNEUMATCZNEGO CIĄGNIKA ROLNICZEGO Bonisław Kolato Kateda Eksploatacji Pojadów i Masyn, Uniwesytet Wamińsko-Mauski w Olstynie Stescenie.
MOTROL, 26, 8, 118 124 WBRANE ZAGADNIENIA ODKSZTAŁCEŃ NAPĘDOWEGO KOŁA PNEUMATCZNEGO CIĄGNIKA ROLNICZEGO Bonisław Kolato Kateda Eksploatacji Pojadów i Masyn, Uniwesytet Wamińsko-Mauski w Olstynie Stescenie.
POTENCJALNE POLE SIŁ. ,F z 2 V. x = x y, F y. , F x z F z. y F y
 POTENCJALNE POLE SIŁ POLE SKALARNE Polem skalarnm V(r) nawam funkcję prpisującą każdemu punktowi w prestreni licbę recwistą (skalar): V (r): r=(,, ) V (r) POLE WEKTOROWE SIŁ Polem wektorowm sił F(r) nawam
POTENCJALNE POLE SIŁ POLE SKALARNE Polem skalarnm V(r) nawam funkcję prpisującą każdemu punktowi w prestreni licbę recwistą (skalar): V (r): r=(,, ) V (r) POLE WEKTOROWE SIŁ Polem wektorowm sił F(r) nawam
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w popzednim odcinku 1 Zasady dynamiki Newtona I II Każde ciało twa w stanie spoczynku lub pousza się uchem postoliniowym i jednostajnym, jeśli siły pzyłożone nie zmuszają ciała do zmiany tego stanu Zmiana
w popzednim odcinku 1 Zasady dynamiki Newtona I II Każde ciało twa w stanie spoczynku lub pousza się uchem postoliniowym i jednostajnym, jeśli siły pzyłożone nie zmuszają ciała do zmiany tego stanu Zmiana
dr inż. Zbigniew Szklarski
 Wkłd 3: Kinemtk d inż. Zbigniew Szklski szkl@gh.edu.pl http://le.uci.gh.edu.pl/z.szklski/ Wstęp Opis uchu KINEMATYKA Dlczego tki uch? Pzczn uchu DYNAMIKA MECHANIKA 08.03.018 Wdził Infomtki, Elektoniki
Wkłd 3: Kinemtk d inż. Zbigniew Szklski szkl@gh.edu.pl http://le.uci.gh.edu.pl/z.szklski/ Wstęp Opis uchu KINEMATYKA Dlczego tki uch? Pzczn uchu DYNAMIKA MECHANIKA 08.03.018 Wdził Infomtki, Elektoniki
Zasady dynamiki ruchu obrotowego
 DYNAMIKA (cz.) Dynamika układu punktów Śodek masy i uch śodka masy Dynamika były sztywnej Moment bezwładności, siły i pędu Zasada zachowania momentu pędu Pawo Steinea Zasady dynamiki uchu obotowego Politechnika
DYNAMIKA (cz.) Dynamika układu punktów Śodek masy i uch śodka masy Dynamika były sztywnej Moment bezwładności, siły i pędu Zasada zachowania momentu pędu Pawo Steinea Zasady dynamiki uchu obotowego Politechnika
XXXVII OLIMPIADA FIZYCZNA ETAP III Zadanie doświadczalne
 XXXVII OIMPIADA FIZYCZNA ETAP III Zadanie doświadczalne ZADANIE D Nazwa zadania: Obacający się pęt swobodnie Długi cienki pęt obaca się swobodnie wokół ustalonej pionowej osi, postopadłej do niego yc.
XXXVII OIMPIADA FIZYCZNA ETAP III Zadanie doświadczalne ZADANIE D Nazwa zadania: Obacający się pęt swobodnie Długi cienki pęt obaca się swobodnie wokół ustalonej pionowej osi, postopadłej do niego yc.
Fizyka 3. Janusz Andrzejewski
 Fizka 3 Ruch ciała Oaz się obaca Cegła się pzesuwa 6 meów Cz ważne jes o, ab opócz faku pzesunięcia się cegł uwzględnić eż obó cegł? Punk maeialn Punk maeialn-ciało, kóego ozmia i kszał w danm zagadnieniu
Fizka 3 Ruch ciała Oaz się obaca Cegła się pzesuwa 6 meów Cz ważne jes o, ab opócz faku pzesunięcia się cegł uwzględnić eż obó cegł? Punk maeialn Punk maeialn-ciało, kóego ozmia i kszał w danm zagadnieniu
ELEKTRODYNAMIKA TECHNICZNA
 PAWEŁ ZIMNY ELEKTRODYNAMIKA TECHNICZNA WYKŁADY DLA SPECJALNOŚCI ZAMAWIANEJ TECHNOLOGIE INFORMATYCZNE W ELEKTROTECHNICE WYDAWNICTWO POLITECHNIKI GDAŃSKIEJ Mateiał ostał pgotowane w wiąku ealiacją pojektu
PAWEŁ ZIMNY ELEKTRODYNAMIKA TECHNICZNA WYKŁADY DLA SPECJALNOŚCI ZAMAWIANEJ TECHNOLOGIE INFORMATYCZNE W ELEKTROTECHNICE WYDAWNICTWO POLITECHNIKI GDAŃSKIEJ Mateiał ostał pgotowane w wiąku ealiacją pojektu
Wyznaczanie profilu prędkości płynu w rurociągu o przekroju kołowym
 1.Wpowadzenie Wyznaczanie pofilu pędkości płynu w uociągu o pzekoju kołowym Dla ustalonego, jednokieunkowego i uwastwionego pzepływu pzez uę o pzekoju kołowym ównanie Naviea-Stokesa upaszcza się do postaci
1.Wpowadzenie Wyznaczanie pofilu pędkości płynu w uociągu o pzekoju kołowym Dla ustalonego, jednokieunkowego i uwastwionego pzepływu pzez uę o pzekoju kołowym ównanie Naviea-Stokesa upaszcza się do postaci
Podstawy Automatyzacji Okrętu
 Politechnika dańka Wdiał Oceanotechniki i Okętownictwa St. inż. I topnia e. IV kieunek: Oceanotechnika Specjalności Okętowe Podtaw Autoatacji Okętu MODEL MAEMACZ UCHU SAKU M. H. haei Maec 07 Podtaw autoatacji
Politechnika dańka Wdiał Oceanotechniki i Okętownictwa St. inż. I topnia e. IV kieunek: Oceanotechnika Specjalności Okętowe Podtaw Autoatacji Okętu MODEL MAEMACZ UCHU SAKU M. H. haei Maec 07 Podtaw autoatacji
Próba określenia miary jakości informacji na gruncie teorii grafów dla potrzeb dydaktyki
 Póba okeślenia miay jakości infomacji na guncie teoii gafów dla potzeb dydaktyki Zbigniew Osiak E-mail: zbigniew.osiak@gmail.com http://ocid.og/0000-0002-5007-306x http://via.og/autho/zbigniew_osiak Steszczenie
Póba okeślenia miay jakości infomacji na guncie teoii gafów dla potzeb dydaktyki Zbigniew Osiak E-mail: zbigniew.osiak@gmail.com http://ocid.og/0000-0002-5007-306x http://via.og/autho/zbigniew_osiak Steszczenie
PRĄD ELEKTRYCZNY I SIŁA MAGNETYCZNA
 PĄD LKTYCZNY SŁA MAGNTYCZNA Na ładunek, opócz siły elektostatycznej, działa ównież siła magnetyczna popocjonalna do pędkości ładunku v. Pzekonamy się, że siła działająca na magnes to siła działająca na
PĄD LKTYCZNY SŁA MAGNTYCZNA Na ładunek, opócz siły elektostatycznej, działa ównież siła magnetyczna popocjonalna do pędkości ładunku v. Pzekonamy się, że siła działająca na magnes to siła działająca na
Podstawy Automatyzacji Okrętu
 Politechnika dańka Wdiał Oceanotechniki i Okętownictwa St. inż. I topnia e. IV kieunek: anpot Podtaw Autoatacji Okętu 3 MODEL MAEMAYCZY UCHU SAKU M. H. haei Maec 017 Autoatacja tatku. Model ateatcn 1 3.
Politechnika dańka Wdiał Oceanotechniki i Okętownictwa St. inż. I topnia e. IV kieunek: anpot Podtaw Autoatacji Okętu 3 MODEL MAEMAYCZY UCHU SAKU M. H. haei Maec 017 Autoatacja tatku. Model ateatcn 1 3.
Praca. r r. Praca jest jednąz form wymiany energii między ciałami. W przypadku, gdy na ciało
 Paca i enegia Paca Paca jest jedną fom wymiany enegii międy ciałami. W pypadku, gdy na ciało będące punktem mateialnym diała stała siła F const oa uch ciała odbywa się od punktu A do B po linii postej
Paca i enegia Paca Paca jest jedną fom wymiany enegii międy ciałami. W pypadku, gdy na ciało będące punktem mateialnym diała stała siła F const oa uch ciała odbywa się od punktu A do B po linii postej
Wstęp. Ruch po okręgu w kartezjańskim układzie współrzędnych
 Wstęp Ruch po okręgu jest najprostszym przypadkiem płaskich ruchów krzywoliniowych. W ogólnym przypadku ruch po okręgu opisujemy równaniami: gdzie: dowolna funkcja czasu. Ruch odbywa się po okręgu o środku
Wstęp Ruch po okręgu jest najprostszym przypadkiem płaskich ruchów krzywoliniowych. W ogólnym przypadku ruch po okręgu opisujemy równaniami: gdzie: dowolna funkcja czasu. Ruch odbywa się po okręgu o środku
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Wzorce sekunda Aktualnie niepewność pomiaru czasu to 1s na 70mln lat!!! 2 Modele w fizyce Uproszczenie problemów Tworzenie prostych modeli, pojęć i operowanie nimi 3 Opis ruchu Opis
w poprzednim odcinku 1 Wzorce sekunda Aktualnie niepewność pomiaru czasu to 1s na 70mln lat!!! 2 Modele w fizyce Uproszczenie problemów Tworzenie prostych modeli, pojęć i operowanie nimi 3 Opis ruchu Opis
1 4πε. Fizyka elementarna materiały dla studentów. Części 18 i 19. Prawo Gaussa
 Fika lmntana matiał dla studntów. Cęści 18 i 19. Pawo Gaussa Cęściowo pgotowan na podstawi matiałów oku akadmickigo 007/8. Agniska Kogul Litatua: J. Blinowski, J. Tlski Fika dla kanddatów na wżs uclni
Fika lmntana matiał dla studntów. Cęści 18 i 19. Pawo Gaussa Cęściowo pgotowan na podstawi matiałów oku akadmickigo 007/8. Agniska Kogul Litatua: J. Blinowski, J. Tlski Fika dla kanddatów na wżs uclni
Zginanie ukośne LABORATORIUM WYTRZYMAŁOŚCI MATERIAŁÓW. Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki
 Katedra Wtrmałości Materiałów i Metod Komputerowch Mechaniki Wdiał Mechanicn Technologicn Politechnika Śląska LABORATORUM WYTRZYMAŁOŚC MATERAŁÓW Zginanie ukośne ZGNANE UKOŚNE 2 1. CEL ĆWCZENA Ćwicenie
Katedra Wtrmałości Materiałów i Metod Komputerowch Mechaniki Wdiał Mechanicn Technologicn Politechnika Śląska LABORATORUM WYTRZYMAŁOŚC MATERAŁÓW Zginanie ukośne ZGNANE UKOŚNE 2 1. CEL ĆWCZENA Ćwicenie
Podstawy elektrodynamiki 1
 Wstęp Podstawy eektodynamiki Zakes wykładu Podęcniki Waunki aicenia D hab. inż. Włodimie Zieniutyc, pof. nadw. PG, pok. 74, e-mai: w@eti.pg.gda.p Zakes wykładu Zakes wykładu cd. Wstęp Matematycne naędia
Wstęp Podstawy eektodynamiki Zakes wykładu Podęcniki Waunki aicenia D hab. inż. Włodimie Zieniutyc, pof. nadw. PG, pok. 74, e-mai: w@eti.pg.gda.p Zakes wykładu Zakes wykładu cd. Wstęp Matematycne naędia
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 Pediot: Fika RUCH OBROTOWY- MECHANKA BRYŁY SZTYWNEJ Wkład 7 7/8, ia Pediot: Fika MOMENT PĘDU ENERGA KNETYCZNA W RUCHU PUNKTU MATERANEGO PO OKRĘGU Defiicja oetu pędu =v= ω p =ω = p ω Moet bewładości Jedostką
Pediot: Fika RUCH OBROTOWY- MECHANKA BRYŁY SZTYWNEJ Wkład 7 7/8, ia Pediot: Fika MOMENT PĘDU ENERGA KNETYCZNA W RUCHU PUNKTU MATERANEGO PO OKRĘGU Defiicja oetu pędu =v= ω p =ω = p ω Moet bewładości Jedostką
Równoważne układy sił
 Równoważne układ sił Równoważnmi układami sił nawam takie układ, którch skutki diałania na ten sam obiekt są jednakowe. Jeżeli układ sił da się astąpić jedną siłą, to siłę tą nawam siłą wpadkową. Wpadkowa
Równoważne układ sił Równoważnmi układami sił nawam takie układ, którch skutki diałania na ten sam obiekt są jednakowe. Jeżeli układ sił da się astąpić jedną siłą, to siłę tą nawam siłą wpadkową. Wpadkowa
Transformator Φ M. uzwojenia; siła elektromotoryczna indukowana w i-tym zwoju: dφ. = z1, z2 liczba zwojów uzwojenia pierwotnego i wtórnego.
 Transformator Φ r Φ M Φ r i i u u Φ i strumień magnetycny prenikający pre i-ty wój pierwsego uwojenia; siła elektromotorycna indukowana w i-tym woju: dφ ei, licba wojów uwojenia pierwotnego i wtórnego.
Transformator Φ r Φ M Φ r i i u u Φ i strumień magnetycny prenikający pre i-ty wój pierwsego uwojenia; siła elektromotorycna indukowana w i-tym woju: dφ ei, licba wojów uwojenia pierwotnego i wtórnego.
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
Geometria analityczna w przestrzeni. Kierunek. Długość. Zwrot
 - podstawowe pojęcia Geometria analitcna w prestreni Wektorem acepionm w prestreni R 3 nawam uporądkowaną parę punktów A ora B i onacam go pre AB. Punkt A nawam jego pocątkiem, a punkt B - jego końcem.
- podstawowe pojęcia Geometria analitcna w prestreni Wektorem acepionm w prestreni R 3 nawam uporądkowaną parę punktów A ora B i onacam go pre AB. Punkt A nawam jego pocątkiem, a punkt B - jego końcem.
Fizyka dla Informatyki Stosowanej
 Fika dla Infomatki Stosowanej Jacek Golak Semest imow 16/17 Wkład n 13 Pole magnetcne Pole magnetcne opiswane jest p pomoc wektoa indukcji magnetcnej B o tej własności że na ładunek elektcn pousając się
Fika dla Infomatki Stosowanej Jacek Golak Semest imow 16/17 Wkład n 13 Pole magnetcne Pole magnetcne opiswane jest p pomoc wektoa indukcji magnetcnej B o tej własności że na ładunek elektcn pousając się
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w popzednim odcinku 1 Zasada zachowania pędu p Δp i 0 p i const. Zasady zachowania: pęd W układzie odosobnionym całkowity pęd (suma pędów wszystkich ciał) jest wielkością stałą. p 1p + p p + = p 1k + p
w popzednim odcinku 1 Zasada zachowania pędu p Δp i 0 p i const. Zasady zachowania: pęd W układzie odosobnionym całkowity pęd (suma pędów wszystkich ciał) jest wielkością stałą. p 1p + p p + = p 1k + p
IV.2. Efekt Coriolisa.
 IV.. Efekt oiolisa. Janusz B. Kępka Ruch absolutny i względny Załóżmy, że na wiującej taczy z pędkością kątową ω = constant ciało o masie m pzemieszcza się ze stałą pędkością = constant od punktu 0 wzdłuż
IV.. Efekt oiolisa. Janusz B. Kępka Ruch absolutny i względny Załóżmy, że na wiującej taczy z pędkością kątową ω = constant ciało o masie m pzemieszcza się ze stałą pędkością = constant od punktu 0 wzdłuż
WYZNACZENIE REAKCJI DYNAMICZNYCH W RUCHU KULISTYM
 14.1. Ce ćwicenia Ćwicenie 14 WYZNACZENIE REAKCJI DYNAICZNYCH W RUCHU KUISTY Ceem ćwicenia jest doświadcane okeśenie eakcji dnamicnch wstępującch w uchu kuistm modeu gniotownika oa poównanie wników pomiaów
14.1. Ce ćwicenia Ćwicenie 14 WYZNACZENIE REAKCJI DYNAICZNYCH W RUCHU KUISTY Ceem ćwicenia jest doświadcane okeśenie eakcji dnamicnch wstępującch w uchu kuistm modeu gniotownika oa poównanie wników pomiaów
>> ω z, (4.122) Przybliżona teoria żyroskopu
 Przybliżona teoria żyroskopu") Prybliżona teoria żyroskopu Żyroskopem naywamy ciało materialne o postaci bryły obrotowej (wirnika), osadone na osi pokrywającej się osią geometrycną tego ciała wanej osią żyroskopową. ζ K θ ω η ω ζ y
Prybliżona teoria żyroskopu Żyroskopem naywamy ciało materialne o postaci bryły obrotowej (wirnika), osadone na osi pokrywającej się osią geometrycną tego ciała wanej osią żyroskopową. ζ K θ ω η ω ζ y
Podstawy wytrzymałości materiałów
 Podstaw wtrmałości materiałów IMiR -IA- Wkład Nr 9 Analia stanu odkstałcenia Składowe stanu odkstałcenia, uogólnione prawo Hooke a, prawo Hooke a dla cstego ścinania, wględna miana objętości, klasfikacja
Podstaw wtrmałości materiałów IMiR -IA- Wkład Nr 9 Analia stanu odkstałcenia Składowe stanu odkstałcenia, uogólnione prawo Hooke a, prawo Hooke a dla cstego ścinania, wględna miana objętości, klasfikacja
Fizyka. Wykład 2. Mateusz Suchanek
 Fizyka Wykład Mateusz Suchanek Zadanie utwalające Ruch punktu na płaszczyźnie okeślony jest ównaniai paaetycznyi: x sin(t ) y cos(t gdzie t oznacza czas. Znaleźć ównanie tou, położenie początkowe punktu,
Fizyka Wykład Mateusz Suchanek Zadanie utwalające Ruch punktu na płaszczyźnie okeślony jest ównaniai paaetycznyi: x sin(t ) y cos(t gdzie t oznacza czas. Znaleźć ównanie tou, położenie początkowe punktu,