RUCH DRGAJĄCY RZESZOTA PRZESIEWACZA DWUCZĘSTOŚCIOWEGO**
|
|
|
- Sylwia Głowacka
- 7 lat temu
- Przeglądów:
Transkrypt
1 Górnictwo i Geoinżynieria Rok 34 Zeszyt 4/ Remigiusz Modrzewski*, Piotr Wodziński* RUCH DRGAJĄCY RZESZOTA PRZESIEWACZA DWUCZĘSTOŚCIOWEGO** 1. Wstęp Przesiewacz dwuczęstościowy zbudowany jest z dwóch wibratorów napędowych oraz prostopadłościennego rzeszota zamontowanego na zawieszeniu sprężystym. Konstrukcja umożliwia zmianę pochylenia rzeszota w zakresie od 0 20 oraz zmianę rozstawu wibratorów (rys. 1). Rys. 1. Możliwe rozmieszczenia osi wibratorów rotacyjnych * Wydział Inżynierii Procesowej i Ochrony Środowiska, Politechnika Łódzka, Łódź ** Praca wykonana w ramach projektu badawczo-rozwojowego MNiSzW nr R
2 Ponadto wibratory przesiewacza mogą pracować w warunkach samosynchronizacji dynamicznej: współbieżnej lub przeciwbieżnej z dowolnymi prędkościami obrotowymi, różnymi dla obu wibratorów. Umożliwia to uzyskanie bardzo zróżnicowanych torów ruchu drgającego. 2. Badanie ruchu drgającego sit przesiewaczy dwuczęstościowych 2.1. Analiza matematyczna ruchu przesiewacza W położeniu równowagi bryły przesiewacza ze środka masy S 0 poprowadzono prawoskrętny układ osi współrzędnych x, y, z. Tak podwieszona bryła przesiewacza ma 6 stopni swobody w przestrzeni. Jednak ze względu na brak sił wymuszających działających w kierunku z rozważany układ ograniczono do płaszczyzny poprzecznej do sita xy. Tłumienie w rozważanym układzie zostało pominięte [1, 2, 4]. Kąty obrotu bryły wokół osi poprzecznej z oznaczono przez ϕ z. Przedmiotem rozważań jest ruch środka masy bryły przesiewacza o masie M i momencie bezwładności względem osi poprzecznej (z) wynoszącym I z. Przesiewacz podwieszony jest za pomocą zespołu czterech jednakowych sprężyn o sztywności pionowej k y oraz sztywności wzdłużnej k x. Wyprowadzenie równań przeprowadzono w dwóch etapach. Początkowo w układzie nie uwzględniono sił wymuszających ruch i rozpatrywano go najpierw jako układ wykonujący drgania swobodne. Układ równań ruchu swobodnego bryły przesiewacza w oparciu o drugą zasadę dynamiki Newtona w zapisie macierzowym ma postać: Bs && + K s = 0 (1) gdzie: B macierz bezwładności rozważanego układu, K macierz sprężystości układu, s wektor przemieszczeń bryły przesiewacza s = { x, y, ϕ }. z Równanie (1) stanowi jednorodną postać pełnego równania ruchu rozważanego układu [1]. W celu wyznaczenia równania (1) bryłę przesiewacza wychylono z położenia równowagi nadając jej kolejno przemieszczenia zgodnie z dodatnimi zwrotami poszczególnych sześciu współrzędnych. Położenia bryły po wychyleniu z pozycji równowagi zaznaczono na rysunku 4 linią przerywaną. Każdemu wychyleniu bryły z położenia równowagi towarzyszy pojawienie się sił reakcyjnych w elementach sprężystych układu. Siły te oraz ich momenty wyznaczają elementy macierzy sprężystości układu w równaniu (1). Sposób wyznaczania układu równań ilustruje rysunek
3 Rys. 2. Sposób wyznaczania równań ruchu Lewa str. równań ruchu (w/g rys. 2) ma postać: Pix = Mx && 4P x P1 ϕ ( ) ( ) z P ix = Mx && K x K A x + x 0ϕz (2) Piy = My && 4P y ( ) P My K y iy = && + y (3) M = J ϕ&& 4P( ϕ ) B P ( ϕ ) A 4P( x) A iz z z z 1 1 z 0 0 M iz = J ϕ && z + K B y 1ϕ K A K A x z + x 0ϕ z + x 0 (4) W drugim etapie wyprowadzania równań ruchu przesiewacza uwzględniono działanie silników generujących siły odśrodkowe wymuszające ruch. Niech P oznacza wektor sił i momentów sił wymuszających, działających na rozważany układ dynamiczny. Wtedy całkowite równanie ruchu wymuszonego bryły przesiewacza ma postać Bs && + K s = P (5) 195

4 W drugim etapie wyprowadzania równań ruchu określono składowe wektora P. W tym celu zastosowano zasadę superpozycji dodając kolejno siły wymuszające pochodzące od poszczególnych silników wymuszających ruch przesiewacza. Proces ten ilustruje rysunek 3. Rys. 3. Siły wymuszające działające na rzeszoto Prawa str. równań ruchu (wg rys. 5) ma postać: P = F + F ix x1 x2 P ix = mr 11ω1 cos ω t m r 1 + ω2cos ω (6) P = F + F iy y1 y2 P iy = mr 11ω1 sin ω t 1 + m r ω2sin ω t 2 (7) M = F H F H iz x1 1 x2 1 M iz = Hmr 1 1 1ω1 cos ω t 1 Hmr 2ω2cos ω t 2 (8) Na tej podstawie można zapisać ostateczną postać układu równań ruchu: 196
5 Mx && + K x+ K Aϕ = mrω cos ω t+ m rω cos ω t x x 0 z My && + K y = mrω sin ω t+ m rω sin ω t (9) y J ϕ && + KBϕ + KAϕ + KAx= Hmrω cosω t Hmrω cosω t z z y 1 z x 0 z x Równanie (9) przedstawia układ trzech równań różniczkowych zwyczajnych o stałych współczynnikach niejednorodnych. Rozwiązanie pozwoli na wyznaczenie parametrów kinematycznych ruchu przesiewacza. Rozwiązanie ogólne macierzowego równania ruchu (9) jest sumą rozwiązania ogólnego s o równania jednorodnego i rozwiązania szczególnego s s równania pełnego: s = s + s (10) o s Rozwiązanie ogólne równania jednorodnego przedstawia drgania swobodne. Drgania te znikają po początkowym okresie przejściowym na skutek tłumienia, które nie zostało uwzględnione w rozważanym modelu matematycznym. Rozwiązanie szczególne równania pełnego przedstawia drgania wymuszone układu, które jako jedyne występuje w stanie ustalonym. Z uwagi na istnienie dwóch, w ogólnym przypadku niezależnych, sił odśrodkowych wymuszających ruch przesiewacza i zmieniających się z częstościami odpowiednio ω 1 i ω 2 rozwiązanie szczególne pełnego równania ruchu przedstawiono jako sumę rozwiązań szczególnych z częstościami ω 1 i ω 2. s = s + s (11) s ω1 ω2 Układ równań (9) opisujący ruch przesiewacza można zapisać w następującej postaci: && x +α x+α Aϕ =βω cosω t+β ω cosω t x x 0 z && y +α y =βω sin ω t+β ω sin ω t (12) y ϕ && +α ϕ +α A x =β ω cos ω t β ω cos ω t z xyz z xz 0 1z 1 1 2z gdzie: K KB + KA α = ; α = ; α = ; α = ; Kx y Kx y 1 x 0 x y xz xyz M M Jz Jz 197
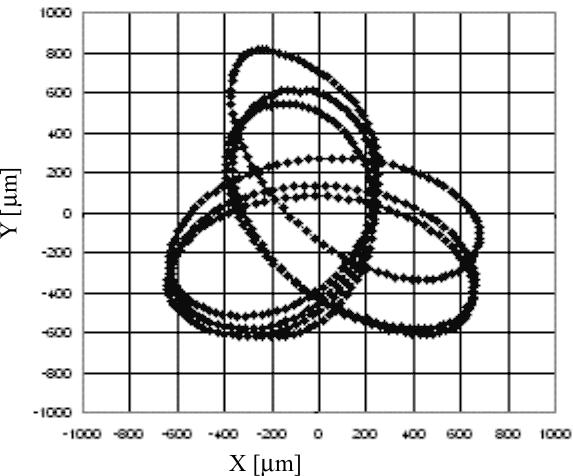
6 mr mr Hmr Hmr β = ; β = ; β = ; β = z 2z M M Jz Jz Suma rozwiązań szczególnych z częstościami ω 1 i ω 2 stanowi rozwiązanie szczególne układu równań (12). Dla rozważanego przesiewacza rozwiązanie końcowe ma postać: ( ) ( )( ) ( ) ( )( ) βω α ω α Aβ ω β ω α ω α Aβ ω x = ω t+ ω t α ω α ω α α α ω α ω α α 1 1 xyz 1 x 0 1z 1 xyz 2 x 0 2z 2 cos 2 1 cos 2 2 x 1 xyz 1 x A0 xz x 2 xyz 2 x A0 xz y βω βω = ω t+ ω t α ω 1 1 sin 2 1 sin y 1 αy ω2 (13) ( ) ( )( ) ( ) ( )( ) β ω α ω α Aβω β ω α ω α Aβ ω ϕ z = ω + ω t α ω α ω α α α ω α ω α α 1z 1 x 1 xz z 2 x 2 xz 0 cos 2 1t cos 2 2 xyz 1 x 1 xz A0 x xyz 2 x 2 xz A0 x 2.2. Symulacja komputerowa ruchu drgającego przesiewacza Układ równań (13) posłużył do stworzenia w programie Excel symulacji ruchu rzeszota. Rysunki 4 i 5 przedstawiają rzuty na płaszczyznę układu chwilowych położeń środka masy przesiewacza, zgodnie z podziałem czasu obserwacji. Zbiór chwilowych położeń bryły w czasie okresu ruchu daje obraz trajektorii ruchu. Jako dane do obliczeń posłużyły parametry przesiewacza zainstalowanego na stanowisku doświadczalnym takie, jak: masa M = 150 kg, sztywność układu w kier. y i x: k x = k y = N/m, masowy moment bezwładności względem osi z I z = 110 kg m 2, itp. Kombinacje prędkości rotacyjnych wibratorów napędowych (w obr./min.) przedstawia tabela 1. TABELA 1 Prędkości obrotowe wibratorów ω 1 ω 2 ω 1 ω 2 zgodnie przeciwnie
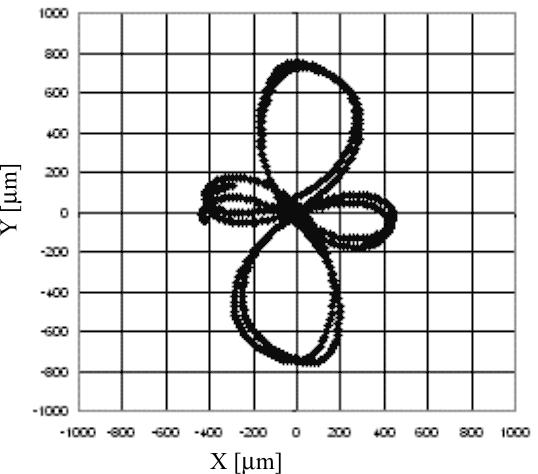
7 a) b) c) d) Rys. 4. Tory ruchu dla synchronizacji zgodnej. Stosunek częstości rotacyjnej wibratorów ω 1 /ω 2 : a) ω 1 /ω 2 = 1, b) ω 1 /ω 2 = 2/3, c) ω 1 /ω 2 = 1/2, d) ω 1 /ω 2 = 1/3 a) b) c) d) Rys. 5. Tory ruchu dla synchronizacji przeciwnej. Stosunek częstości rotacyjnej wibratorów ω 1 /ω 2 : a) ω 1 /ω 2 = 1, b) ω 1 /ω 2 = 2/3, c) ω 1 /ω 2 = 1/2, d) ω 1 /ω 2 = 1/3 199


 ω 1 /ω 2 = 1, b)")
 ω 1 /ω 2 = 1/3")

8 a) b) c) d) Rys. 6. Tory ruchu dla synchronizacji zgodnej. Stosunek częstości rotacyjnej wibratorów ω 1 /ω 2 : a) ω 1 /ω 2 = 1, b) ω 1 /ω 2 = 2/3, c) ω 1 /ω 2 = 1/2, d) ω 1 /ω 2 = 1/3 a) b) c) d) Rys. 7. Tory ruchu dla synchronizacji przeciwnej. Stosunek częstości rotacyjnej wibratorów ω 1 /ω 2 : a) ω 1 /ω 2 = 1, b) ω 1 /ω 2 = 2/3, c) ω 1 /ω 2 = 1/2, d) ω 1 /ω 2 = 1/3 200
9 2.3. Badania kinematyczne przesiewacza Pomiary amplitudy drgań rzeszota wykonano przy pomocy układu składającego się z czujników piezoelektrycznych, układu całkującego i laptopa. Dzięki czterem czujnikom zamontowanym na rzeszocie zbierane były dane dotyczące wychylenia sita. Czujniki pomiarowe zamontowane były w rzeszocie w taki sposób, aby linie ich pomiaru przecinały się w okolicy środka ciężkości przesiewacza. Na rysunkach 6 i 7 przedstawione zostały przykładowe tory ruchu środka rzeszota, dla wybranych konfiguracji napędowych przesiewacza, takich samych jak przy symulacji komputerowej. 3. Określenie założeń projektowych dla przesiewaczy dwuczęstościowych Na podstawie wykresów torów drgań, wyznaczono wartość współczynnika podrzuty K w kierunku y prostopadłym do powierzchni sita. Przykładowe wyniki pomiarów i obliczeń dla różnych stosunków prędkości wibratorów napędowych przedstawiono w tabeli 2. Sumaryczny wskaźnik podrzutu wyznaczono jako średnią arytmetyczną z wartości zmierzonych w punktach pomiarowych [3]. TABELA 2 Wartości współczynników podrzutu Siła wymuszająca Stosunek prędkości wibratorów K 1 K 2 K 3 K śr ω 1 /ω,10 0,45 2,10 1,55 ω 1 / ω 2 0,15 0,30 0,45 0,30 ω 1 /2/3ω 2 1,13 1,07 1,13 1,11 F max = 2 kn ω 1 / 2/3ω 2 0,87 1,07 1,07 1,00 ω 1 /1/2ω 2 0,67 0,60 0,64 0,64 ω 1 / 1/2ω 2 0,67 0,56 0,60 0,61 ω 1 /1/3ω 2 0,27 0,20 0,28 0,25 ω 1 / 1/3ω 2 0,27 0,25 0,32 0,28 Na podstawie analizy całości uzyskanych do tej pory wyników można stwierdzić, że decydujące znaczenie dla kształtów torów ruchu ma wartość stosunku prędkości obrotowej elektrowibratorów. Ogólnie można stwierdzić, że rzeszoto jest bardzo czułe na zmiany kon- 201
10 figuracji napędu i nawet niewielka zmiana jego parametrów powoduje znaczącą zmianę kształtu toru ruchu sita. Wskaźnik podrzutu wyraźnie maleje z obniżaniem się stosunku prędkości wibratorów napędowych i to w obu przypadkach synchronizacji, zarówno współ, jak i przeciwbieżnej (tab. 2). Wydaj się to być zjawiskiem niekorzystnym, jednak późniejsze badania procesowe nie potwierdziły tego. Wskazywać to może na fakt, iż nie wysoki wskaźnik podrzutu, ale właśnie skomplikowany ruch sita zapewnia dobre warunki przesiewania. Wraz z obniżaniem się stosunku prędkości wibratorów złożoność torów ruchu sita wyraźnie rośnie. Badania procesowe stanowią jedyną drogę osiągnięcia celu, jakim jest optymalizacja układu napędowego, ponieważ nawet poprawna praca układów mechanicznych nie oznacza jeszcze zapewnienia dostatecznie dobrych warunków przesiewania. Analiza uzyskanych wyników badań pozwoliła określić zakres optymalnych parametrów pracy przesiewacza dwuczęstościowego (tab. 3), co znacznie skróci i uprości kolejny etap prac jakim jest badanie przesiewacza w skali przemysłowej. Na podstawie wyników badań przesiewcza dwuczęstościowego w skali laboratoryjnej, opracowano koncepcję budowy przesiewacza przemysłowego, który zainstalowany będzie w jednym z zakładów wydobywczych zajmujących się eksploatacją kruszyw mineralnych. TABELA 3 Najkorzystniejsze parametry pracy przesiewacza dwuczęstościowego Kąt nachylenia sita do poziomu Rozstaw wibratorów w stosunku do długości rzeszota Stosunek sił wymuszających wibratorów Stosunek prędkości wibratorów ω 1 /ω 2 0 1/4 1/3 0 1/4 1/3 20 1/3 1/4 1/3 1/3 1/4 1/3 2/3 1/4 1/3 2/3 1/4 1/3 LITERATURA [1] Banaszewski T.: Przesiewacze. Wydawnictwo Śląsk, 1990 [2] Wodziński P.: Przesiewanie i przesiewacze. Wydawnictwo Politechniki Łódzkiej, 1997 [3] Wodziński P.: Odsiewanie materiałów ziarnistych. Zeszyty Naukowe PŁ, z. 40, 1981 [4] Turkiewicz W., Banaszewski T.: Wzrost amplitudy drgań podczas zatrzymywania przesiewaczy z napędami bezwładnościowymi. Archiwum Górnictwa, z. 4,
DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Rys Model układu
 Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej
 MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
Laboratorium Mechaniki Technicznej
 Laboratorium Mechaniki Technicznej Ćwiczenie nr 5 Badanie drgań liniowych układu o jednym stopniu swobody Katedra Automatyki, Biomechaniki i Mechatroniki 90-924 Łódź, ul. Stefanowskiego 1/15, budynek A22
Laboratorium Mechaniki Technicznej Ćwiczenie nr 5 Badanie drgań liniowych układu o jednym stopniu swobody Katedra Automatyki, Biomechaniki i Mechatroniki 90-924 Łódź, ul. Stefanowskiego 1/15, budynek A22
Drgania układu o wielu stopniach swobody
 Drgania układu o wielu stopniach swobody Rozpatrzmy układ składający się z n ciał o masach m i (i =,,..., n, połączonych między sobą i z nieruchomym podłożem za pomocą elementów sprężystych o współczynnikach
Drgania układu o wielu stopniach swobody Rozpatrzmy układ składający się z n ciał o masach m i (i =,,..., n, połączonych między sobą i z nieruchomym podłożem za pomocą elementów sprężystych o współczynnikach
Nazwisko i imię: Zespół: Data: Ćwiczenie nr 1: Wahadło fizyczne. opis ruchu drgającego a w szczególności drgań wahadła fizycznego
 Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
MECHANIKA 2. Drgania punktu materialnego. Wykład Nr 8. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 8 Drgania punktu materialnego Prowadzący: dr Krzysztof Polko Wstęp Drgania Okresowe i nieokresowe Swobodne i wymuszone Tłumione i nietłumione Wstęp Drgania okresowe ruch powtarzający
MECHANIKA 2 Wykład Nr 8 Drgania punktu materialnego Prowadzący: dr Krzysztof Polko Wstęp Drgania Okresowe i nieokresowe Swobodne i wymuszone Tłumione i nietłumione Wstęp Drgania okresowe ruch powtarzający
BADANIE DRGAŃ TŁUMIONYCH WAHADŁA FIZYCZNEGO
 ĆWICZENIE 36 BADANIE DRGAŃ TŁUMIONYCH WAHADŁA FIZYCZNEGO Cel ćwiczenia: Wyznaczenie podstawowych parametrów drgań tłumionych: okresu (T), częstotliwości (f), częstotliwości kołowej (ω), współczynnika tłumienia
ĆWICZENIE 36 BADANIE DRGAŃ TŁUMIONYCH WAHADŁA FIZYCZNEGO Cel ćwiczenia: Wyznaczenie podstawowych parametrów drgań tłumionych: okresu (T), częstotliwości (f), częstotliwości kołowej (ω), współczynnika tłumienia
Ćwiczenie M-2 Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego Cel ćwiczenia: II. Przyrządy: III. Literatura: IV. Wstęp. l Rys.
 Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
I. DYNAMIKA PUNKTU MATERIALNEGO
 I. DYNAMIKA PUNKTU MATERIALNEGO A. RÓŻNICZKOWE RÓWNANIA RUCHU A1. Bryła o masie m przesuwa się po chropowatej równi z prędkością v M. Podać dynamiczne równania ruchu bryły i rozwiązać je tak, aby wyznaczyć
I. DYNAMIKA PUNKTU MATERIALNEGO A. RÓŻNICZKOWE RÓWNANIA RUCHU A1. Bryła o masie m przesuwa się po chropowatej równi z prędkością v M. Podać dynamiczne równania ruchu bryły i rozwiązać je tak, aby wyznaczyć
O 2 O 1. Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
 msg M 7-1 - Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Zagadnienia: prawa dynamiki Newtona, moment sił, moment bezwładności, dynamiczne równania ruchu wahadła fizycznego,
msg M 7-1 - Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Zagadnienia: prawa dynamiki Newtona, moment sił, moment bezwładności, dynamiczne równania ruchu wahadła fizycznego,
Fizyka 11. Janusz Andrzejewski
 Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
MECHANIKA II. Dynamika układu punktów materialnych
 MECHANIKA II. Dynamika układu punktów materialnych Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA II. Dynamika układu punktów materialnych Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
Podstawy fizyki sezon 1 VII. Ruch drgający
 Podstawy fizyki sezon 1 VII. Ruch drgający Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Ruch skutkiem działania
Podstawy fizyki sezon 1 VII. Ruch drgający Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Ruch skutkiem działania
WYZNACZANIE MODUŁU SZTYWNOŚCI METODĄ DYNAMICZNĄ
 ĆWICZENIE 12 WYZNACZANIE MODUŁU SZTYWNOŚCI METODĄ DYNAMICZNĄ Cel ćwiczenia: Wyznaczanie modułu sztywności drutu metodą sprężystych drgań obrotowych. Zagadnienia: sprężystość, naprężenie ścinające, prawo
ĆWICZENIE 12 WYZNACZANIE MODUŁU SZTYWNOŚCI METODĄ DYNAMICZNĄ Cel ćwiczenia: Wyznaczanie modułu sztywności drutu metodą sprężystych drgań obrotowych. Zagadnienia: sprężystość, naprężenie ścinające, prawo
Ć W I C Z E N I E N R E-15
 NSTYTUT FZYK WYDZAŁ NŻYNER PRODUKCJ TECNOLOG MATERAŁÓW POLTECNKA CZĘSTOCOWSKA PRACOWNA ELEKTRYCZNOŚC MAGNETYZMU Ć W C Z E N E N R E-15 WYZNACZANE SKŁADOWEJ POZOMEJ NATĘŻENA POLA MAGNETYCZNEGO ZEM METODĄ
NSTYTUT FZYK WYDZAŁ NŻYNER PRODUKCJ TECNOLOG MATERAŁÓW POLTECNKA CZĘSTOCOWSKA PRACOWNA ELEKTRYCZNOŚC MAGNETYZMU Ć W C Z E N E N R E-15 WYZNACZANE SKŁADOWEJ POZOMEJ NATĘŻENA POLA MAGNETYCZNEGO ZEM METODĄ
Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY. 1. Cel ćwiczenia
 Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY 1. Cel ćwiczenia Przeprowadzenie izolacji drgań przekładni zębatej oraz doświadczalne wyznaczenie współczynnika przenoszenia drgań urządzenia na fundament.. Wprowadzenie
Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY 1. Cel ćwiczenia Przeprowadzenie izolacji drgań przekładni zębatej oraz doświadczalne wyznaczenie współczynnika przenoszenia drgań urządzenia na fundament.. Wprowadzenie
Opis ćwiczenia. Cel ćwiczenia Poznanie budowy i zrozumienie istoty pomiaru przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Henry ego Katera.
 ĆWICZENIE WYZNACZANIE PRZYSPIESZENIA ZIEMSKIEGO ZA POMOCĄ WAHADŁA REWERSYJNEGO Opis ćwiczenia Cel ćwiczenia Poznanie budowy i zrozumienie istoty pomiaru przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
ĆWICZENIE WYZNACZANIE PRZYSPIESZENIA ZIEMSKIEGO ZA POMOCĄ WAHADŁA REWERSYJNEGO Opis ćwiczenia Cel ćwiczenia Poznanie budowy i zrozumienie istoty pomiaru przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
Równania różniczkowe opisujące ruch fotela z pilotem:
 . Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
. Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
Wykład FIZYKA I. Dr hab. inż. Władysław Artur Woźniak. Katedra Optyki i Fotoniki Wydział Podstawowych Problemów Techniki Politechnika Wrocławska
 Wykład FIZYKA I 1. Ruch drgający tłumiony i wymuszony Katedra Optyki i Fotoniki Wydział Podstawowych Problemów Techniki Politechnika Wrocławska http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html DRGANIA HARMONICZNE
Wykład FIZYKA I 1. Ruch drgający tłumiony i wymuszony Katedra Optyki i Fotoniki Wydział Podstawowych Problemów Techniki Politechnika Wrocławska http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html DRGANIA HARMONICZNE
RUCH HARMONICZNY. sin. (r.j.o) sin
 sin") RUCH DRGAJĄCY Ruch harmoniczny Rodzaje drgań Oscylator harmoniczny Energia oscylatora harmonicznego Wahadło matematyczne i fizyczne Drgania tłumione Drgania wymuszone i zjawisko rezonansu Politechnika
RUCH DRGAJĄCY Ruch harmoniczny Rodzaje drgań Oscylator harmoniczny Energia oscylatora harmonicznego Wahadło matematyczne i fizyczne Drgania tłumione Drgania wymuszone i zjawisko rezonansu Politechnika
Ruch drgajacy. Drgania harmoniczne. Drgania harmoniczne... Drgania harmoniczne... Notatki. Notatki. Notatki. Notatki. dr inż.
 Ruch drgajacy dr inż. Ireneusz Owczarek CNMiF PŁ ireneusz.owczarek@p.lodz.pl http://cmf.p.lodz.pl/iowczarek 1 dr inż. Ireneusz Owczarek Ruch drgajacy Drgania harmoniczne Drgania oscylacje to cykliczna
Ruch drgajacy dr inż. Ireneusz Owczarek CNMiF PŁ ireneusz.owczarek@p.lodz.pl http://cmf.p.lodz.pl/iowczarek 1 dr inż. Ireneusz Owczarek Ruch drgajacy Drgania harmoniczne Drgania oscylacje to cykliczna
Ruch drgający i falowy
 Ruch drgający i falowy 1. Ruch harmoniczny 1.1. Pojęcie ruchu harmonicznego Jednym z najbardziej rozpowszechnionych ruchów w mechanice jest ruch ciała drgającego. Przykładem takiego ruchu może być ruch
Ruch drgający i falowy 1. Ruch harmoniczny 1.1. Pojęcie ruchu harmonicznego Jednym z najbardziej rozpowszechnionych ruchów w mechanice jest ruch ciała drgającego. Przykładem takiego ruchu może być ruch
MECHANIKA 2. Praca, moc, energia. Wykład Nr 11. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
Ćw. nr 31. Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2
 1 z 6 Zespół Dydaktyki Fizyki ITiE Politechniki Koszalińskiej Ćw. nr 3 Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2 Cel ćwiczenia Pomiar okresu wahań wahadła z wykorzystaniem bramki optycznej
1 z 6 Zespół Dydaktyki Fizyki ITiE Politechniki Koszalińskiej Ćw. nr 3 Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2 Cel ćwiczenia Pomiar okresu wahań wahadła z wykorzystaniem bramki optycznej
VII. Drgania układów nieliniowych
 VII. Drgania układów nieliniowych 1. Drgania anharmoniczne spowodowane symetryczna siła zwrotna 1.1 Różniczkowe równanie ruchu Rozważamy teraz drgania swobodne masy m przytwierdzonej do sprężyny o współczynniku
VII. Drgania układów nieliniowych 1. Drgania anharmoniczne spowodowane symetryczna siła zwrotna 1.1 Różniczkowe równanie ruchu Rozważamy teraz drgania swobodne masy m przytwierdzonej do sprężyny o współczynniku
Drgania. O. Harmoniczny
 Dobrej fazy! Drgania O. Harmoniczny Położenie równowagi, 5 lipca 218 r. 1 Zadanie Zegar Małgorzata Berajter, update: 217-9-6, id: pl-ciepło-5, diff: 2 Pewien zegar, posiadający wahadło ze srebra, odmierza
Dobrej fazy! Drgania O. Harmoniczny Położenie równowagi, 5 lipca 218 r. 1 Zadanie Zegar Małgorzata Berajter, update: 217-9-6, id: pl-ciepło-5, diff: 2 Pewien zegar, posiadający wahadło ze srebra, odmierza
3 Podstawy teorii drgań układów o skupionych masach
 3 Podstawy teorii drgań układów o skupionych masach 3.1 Drgania układu o jednym stopniu swobody Rozpatrzmy elementarny układ drgający, nazywany też oscylatorem harmonicznym, składający się ze sprężyny
3 Podstawy teorii drgań układów o skupionych masach 3.1 Drgania układu o jednym stopniu swobody Rozpatrzmy elementarny układ drgający, nazywany też oscylatorem harmonicznym, składający się ze sprężyny
Podstawy fizyki wykład 7
 Podstawy fizyki wykład 7 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Drgania Drgania i fale Drgania harmoniczne Siła sprężysta Energia drgań Składanie drgań Drgania tłumione i wymuszone Fale
Podstawy fizyki wykład 7 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Drgania Drgania i fale Drgania harmoniczne Siła sprężysta Energia drgań Składanie drgań Drgania tłumione i wymuszone Fale
Wyznaczanie prędkości lotu pocisku na podstawie badania ruchu wahadła balistycznego
 Ćwiczenie nr Wyznaczanie prędkości lotu pocisku na podstawie badania ruchu wahadła balistycznego. Wymagania do ćwiczenia 1. ynamika ruchu obrotowego.. rgania harmoniczne Literatura:. Halliday, R. Resnick,
Ćwiczenie nr Wyznaczanie prędkości lotu pocisku na podstawie badania ruchu wahadła balistycznego. Wymagania do ćwiczenia 1. ynamika ruchu obrotowego.. rgania harmoniczne Literatura:. Halliday, R. Resnick,
MECHANIKA II. Drgania wymuszone
 MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny Daniel Lewandowski (I-19) MECHANIKA II. Drgania wymuszone 1 / 30 Układ drgajacy o jednym stopniu swobody
MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny Daniel Lewandowski (I-19) MECHANIKA II. Drgania wymuszone 1 / 30 Układ drgajacy o jednym stopniu swobody
Ć W I C Z E N I E N R M-2
 INSYU FIZYKI WYDZIAŁ INŻYNIERII PRODUKCJI I ECHNOLOGII MAERIAŁÓW POLIECHNIKA CZĘSOCHOWSKA PRACOWNIA MECHANIKI Ć W I C Z E N I E N R M- ZALEŻNOŚĆ OKRESU DRGAŃ WAHADŁA OD AMPLIUDY Ćwiczenie M-: Zależność
INSYU FIZYKI WYDZIAŁ INŻYNIERII PRODUKCJI I ECHNOLOGII MAERIAŁÓW POLIECHNIKA CZĘSOCHOWSKA PRACOWNIA MECHANIKI Ć W I C Z E N I E N R M- ZALEŻNOŚĆ OKRESU DRGAŃ WAHADŁA OD AMPLIUDY Ćwiczenie M-: Zależność
Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego (Katera)
") Politechnika Łódzka FTMS Kierunek: nformatyka rok akademicki: 2008/2009 sem. 2. Termin: 6 V 2009 Nr. ćwiczenia: 112 Temat ćwiczenia: Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
Politechnika Łódzka FTMS Kierunek: nformatyka rok akademicki: 2008/2009 sem. 2. Termin: 6 V 2009 Nr. ćwiczenia: 112 Temat ćwiczenia: Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
DRGANIA ELEMENTÓW KONSTRUKCJI
 DRGANIA ELEMENTÓW KONSTRUKCJI (Wprowadzenie) Drgania elementów konstrukcji (prętów, wałów, belek) jak i całych konstrukcji należą do ważnych zagadnień dynamiki konstrukcji Przyczyna: nawet niewielkie drgania
DRGANIA ELEMENTÓW KONSTRUKCJI (Wprowadzenie) Drgania elementów konstrukcji (prętów, wałów, belek) jak i całych konstrukcji należą do ważnych zagadnień dynamiki konstrukcji Przyczyna: nawet niewielkie drgania
Wydział Inżynierii Środowiska; kierunek Inż. Środowiska. Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni
 Wydział Inżynierii Środowiska; kierunek Inż. Środowiska Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni Tabele wzorów matematycznych i fizycznych oraz obszerniejsze listy zadań do kursu są dostępne
Wydział Inżynierii Środowiska; kierunek Inż. Środowiska Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni Tabele wzorów matematycznych i fizycznych oraz obszerniejsze listy zadań do kursu są dostępne
WYZNACZANIE MOMENTU BEZWŁADNOŚCI CIAŁ METODĄ WAHADŁA FIZYCZNEGO GRAWITACYJNEGO I SPRAWDZANIE TWIERDZENIA STEINERA ĆWICZENIE
 ĆWICZENIE 1 WYZNACZANIE MOMENTU BEZWŁADNOŚCI CIAŁ METODĄ WAHADŁA FIZYCZNEGO GRAWITACYJNEGO I SPRAWDZANIE TWIERDZENIA STEINERA Cel ćwiczenia: Doświadczalne potwierdzenie twierdzenia Steinera, wyznaczenie
ĆWICZENIE 1 WYZNACZANIE MOMENTU BEZWŁADNOŚCI CIAŁ METODĄ WAHADŁA FIZYCZNEGO GRAWITACYJNEGO I SPRAWDZANIE TWIERDZENIA STEINERA Cel ćwiczenia: Doświadczalne potwierdzenie twierdzenia Steinera, wyznaczenie
INSTRUKCJA DO ĆWICZENIA NR 5
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 5 PRZEDMIOT TEMAT OPRACOWAŁ MODELOWANIE UKŁADÓW MECHANICZNYCH Badania analityczne układu mechanicznego
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 5 PRZEDMIOT TEMAT OPRACOWAŁ MODELOWANIE UKŁADÓW MECHANICZNYCH Badania analityczne układu mechanicznego
Wykład z modelowania matematycznego. Przykłady modelowania w mechanice i elektrotechnice.
 Wykład z modelowania matematycznego. Przykłady modelowania w mechanice i elektrotechnice. 1 Wahadło matematyczne. Wahadłem matematycznym nazywamy punkt materialny o masie m zawieszony na długiej, cienkiej
Wykład z modelowania matematycznego. Przykłady modelowania w mechanice i elektrotechnice. 1 Wahadło matematyczne. Wahadłem matematycznym nazywamy punkt materialny o masie m zawieszony na długiej, cienkiej
Bąk wirujący wokół pionowej osi jest w równowadze. Momenty działających sił są równe zero (zarówno względem środka masy S jak i punktu podparcia O).
.") Bryła sztywna (2) Bąk Równowaga Rozważmy bąk podparty wirujący do okoła pionowej osi. Z zasady zachowania mementu pędu wynika, że jeśli zapewnimy znikanie momentów sił to kierunek momentu pędu pozostanie
Bryła sztywna (2) Bąk Równowaga Rozważmy bąk podparty wirujący do okoła pionowej osi. Z zasady zachowania mementu pędu wynika, że jeśli zapewnimy znikanie momentów sił to kierunek momentu pędu pozostanie
Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników
 Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników 1. Podstawowe pojęcia związane z niewyważeniem Stan niewyważenia stan wirnika określony takim rozkładem masy, który w czasie wirowania wywołuje
Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników 1. Podstawowe pojęcia związane z niewyważeniem Stan niewyważenia stan wirnika określony takim rozkładem masy, który w czasie wirowania wywołuje
Przenośnik wibracyjny. Przenośnik wibracyjny. Dr inż. Piotr Kulinowski. tel. (617) B-2 parter p.6
 B-2 parter p.6") Przenośnik wibracyjny Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik wibracyjny Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (617) 30 74 B- parter p.6 konsultacje: poniedziałek
Przenośnik wibracyjny Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik wibracyjny Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (617) 30 74 B- parter p.6 konsultacje: poniedziałek
Zasada prac przygotowanych
 1 Ćwiczenie 20 Zasada prac przygotowanych 20.1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z praktycznym zastosowaniem zasady prac przygotowanych przy rozpatrywaniu równowagi układu o dwóch stopniach
1 Ćwiczenie 20 Zasada prac przygotowanych 20.1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z praktycznym zastosowaniem zasady prac przygotowanych przy rozpatrywaniu równowagi układu o dwóch stopniach
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
INSTRUKCJA DO ĆWICZENIA NR 4
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 4 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA UKŁADÓW MECHANCZNYCH Modelowanie fizyczne układu o dwóch stopniach
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 4 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA UKŁADÓW MECHANCZNYCH Modelowanie fizyczne układu o dwóch stopniach
DYNAMIKA RAM WERSJA KOMPUTEROWA
 DYNAMIKA RAM WERSJA KOMPTEROWA Parametry przekrojów belek: E=205MPa=205 10 6 kn m 2 =205109 N m 2 1 - IPE 220 Pręty: 1, 3, 4: I y =2770cm 4 =0,00002770 m 4 EI =5678500 Nm 2 A=33,4 cm 4 =0,00334 m 2 EA=684700000
DYNAMIKA RAM WERSJA KOMPTEROWA Parametry przekrojów belek: E=205MPa=205 10 6 kn m 2 =205109 N m 2 1 - IPE 220 Pręty: 1, 3, 4: I y =2770cm 4 =0,00002770 m 4 EI =5678500 Nm 2 A=33,4 cm 4 =0,00334 m 2 EA=684700000
Wykład FIZYKA I. 10. Ruch drgający tłumiony i wymuszony. Dr hab. inż. Władysław Artur Woźniak
 Wykład FIZYKA I 1. Ruch drgający tłumiony i wymuszony Dr hab. inż. Władysław Artur Woźniak Instytut Fizyki Politechniki Wrocławskiej http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html Siły oporu (tarcia)
Wykład FIZYKA I 1. Ruch drgający tłumiony i wymuszony Dr hab. inż. Władysław Artur Woźniak Instytut Fizyki Politechniki Wrocławskiej http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html Siły oporu (tarcia)
Wyznaczanie momentów bezwładności brył sztywnych metodą zawieszenia trójnitkowego
 POLTECHNKA ŚLĄSKA WYDZAŁ CHEMCZNY KATEDRA FZYKOCHEM TECHNOLOG POLMERÓW LABORATORUM Z FZYK Wyznaczanie momentów bezwładności brył sztywnych metodą zawieszenia trójnitkowego WYZNACZANE MOMENTÓW BEZWŁADNOŚC
POLTECHNKA ŚLĄSKA WYDZAŁ CHEMCZNY KATEDRA FZYKOCHEM TECHNOLOG POLMERÓW LABORATORUM Z FZYK Wyznaczanie momentów bezwładności brył sztywnych metodą zawieszenia trójnitkowego WYZNACZANE MOMENTÓW BEZWŁADNOŚC
INSTRUKCJA DO ĆWICZENIA NR 7
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO
 BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO 1. Cel ćwiczenia Celem ćwiczenia jest poznanie kinematyki i dynamiki ruchu w procesie przemieszczania wstrząsowego oraz wyznaczenie charakterystyki użytkowej
BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO 1. Cel ćwiczenia Celem ćwiczenia jest poznanie kinematyki i dynamiki ruchu w procesie przemieszczania wstrząsowego oraz wyznaczenie charakterystyki użytkowej
m Jeżeli do końca naciągniętej (ściśniętej) sprężyny przymocujemy ciało o masie m., to będzie na nie działała siła (III zasada dynamiki):
 sprężyny przymocujemy ciało o masie m., to będzie na nie działała siła (III zasada dynamiki):") Ruch drgający -. Ruch drgający Ciało jest sprężyste, jeżei odzyskuje pierwotny kształt po ustaniu działania siły, która ten kształt zmieniła. Właściwość sprężystości jest ograniczona, to znaczy, że przy
Ruch drgający -. Ruch drgający Ciało jest sprężyste, jeżei odzyskuje pierwotny kształt po ustaniu działania siły, która ten kształt zmieniła. Właściwość sprężystości jest ograniczona, to znaczy, że przy
Politechnika Białostocka INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH. Doświadczalne sprawdzenie zasady superpozycji
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Temat ćwiczenia: Doświadczalne sprawdzenie zasady superpozycji Numer ćwiczenia: 8 Laboratorium
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Temat ćwiczenia: Doświadczalne sprawdzenie zasady superpozycji Numer ćwiczenia: 8 Laboratorium
Wyznaczenie współczynnika restytucji
 1 Ćwiczenie 19 Wyznaczenie współczynnika restytucji 19.1. Cel ćwiczenia Celem ćwiczenia jest wyznaczenie współczynnika restytucji dla różnych materiałów oraz sprawdzenie słuszności praw obowiązujących
1 Ćwiczenie 19 Wyznaczenie współczynnika restytucji 19.1. Cel ćwiczenia Celem ćwiczenia jest wyznaczenie współczynnika restytucji dla różnych materiałów oraz sprawdzenie słuszności praw obowiązujących
MECHANIKA OGÓLNA (II)
") MECHNIK GÓLN (II) Semestr: II (Mechanika I), III (Mechanika II), rok akad. 2013/2014 Liczba godzin: sem. II *) - wykład 30 godz., ćwiczenia 30 godz. sem. III *) - wykład 30 godz., ćwiczenia 30 godz., ale
MECHNIK GÓLN (II) Semestr: II (Mechanika I), III (Mechanika II), rok akad. 2013/2014 Liczba godzin: sem. II *) - wykład 30 godz., ćwiczenia 30 godz. sem. III *) - wykład 30 godz., ćwiczenia 30 godz., ale
1.1 Przegląd wybranych równań i modeli fizycznych. , u x1 x 2
 Temat 1 Pojęcia podstawowe 1.1 Przegląd wybranych równań i modeli fizycznych Równaniem różniczkowym cząstkowym rzędu drugiego o n zmiennych niezależnych nazywamy równanie postaci gdzie u = u (x 1, x,...,
Temat 1 Pojęcia podstawowe 1.1 Przegląd wybranych równań i modeli fizycznych Równaniem różniczkowym cząstkowym rzędu drugiego o n zmiennych niezależnych nazywamy równanie postaci gdzie u = u (x 1, x,...,
Doświadczalne wyznaczanie współczynnika sztywności (sprężystości) sprężyn i współczynnika sztywności zastępczej
 sprężyn i współczynnika sztywności zastępczej") Doświadczalne wyznaczanie (sprężystości) sprężyn i zastępczej Statyczna metoda wyznaczania. Wprowadzenie Wartość użytej można wyznaczyć z dużą dokładnością metodą statyczną. W tym celu należy zawiesić
Doświadczalne wyznaczanie (sprężystości) sprężyn i zastępczej Statyczna metoda wyznaczania. Wprowadzenie Wartość użytej można wyznaczyć z dużą dokładnością metodą statyczną. W tym celu należy zawiesić
Projekt nr 4. Dynamika ujęcie klasyczne
 Projekt nr 4 Dynamika POLITECHNIKA POZNAŃSKA WYDZIAŁ BUDOWNICTWA I INŻYNIERII ŚRODOWISKA INSTYTUT KONSTRUKCJI BUDOWLANYCH ZAKŁAD MECHANIKI BUDOWLI Projekt nr 4 Dynamika ujęcie klasyczne Konrad Kaczmarek
Projekt nr 4 Dynamika POLITECHNIKA POZNAŃSKA WYDZIAŁ BUDOWNICTWA I INŻYNIERII ŚRODOWISKA INSTYTUT KONSTRUKCJI BUDOWLANYCH ZAKŁAD MECHANIKI BUDOWLI Projekt nr 4 Dynamika ujęcie klasyczne Konrad Kaczmarek
Autor: mgr inż. Robert Cypryjański METODY KOMPUTEROWE
 METODY KOMPUTEROWE PRZYKŁAD ZADANIA NR 1: ANALIZA STATYCZNA KRATOWNICY PŁASKIEJ ZA POMOCĄ MACIERZOWEJ METODY PRZEMIESZCZEŃ Polecenie: Wykonać obliczenia statyczne kratownicy za pomocą macierzowej metody
METODY KOMPUTEROWE PRZYKŁAD ZADANIA NR 1: ANALIZA STATYCZNA KRATOWNICY PŁASKIEJ ZA POMOCĄ MACIERZOWEJ METODY PRZEMIESZCZEŃ Polecenie: Wykonać obliczenia statyczne kratownicy za pomocą macierzowej metody
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
Drgania wymuszone - wahadło Pohla
 Zagadnienia powiązane Częstość kołowa, częstotliwość charakterystyczna, częstotliwość rezonansowa, wahadło skrętne, drgania skrętne, moment siły, moment powrotny, drgania tłumione/nietłumione, drgania
Zagadnienia powiązane Częstość kołowa, częstotliwość charakterystyczna, częstotliwość rezonansowa, wahadło skrętne, drgania skrętne, moment siły, moment powrotny, drgania tłumione/nietłumione, drgania
LABORATORIUM ELEKTROAKUSTYKI. ĆWICZENIE NR 1 Drgania układów mechanicznych
 LABORATORIUM ELEKTROAKUSTYKI ĆWICZENIE NR Drgania układów mechanicznych Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z właściwościami układów drgających oraz metodami pomiaru i analizy drgań. W ramach
LABORATORIUM ELEKTROAKUSTYKI ĆWICZENIE NR Drgania układów mechanicznych Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z właściwościami układów drgających oraz metodami pomiaru i analizy drgań. W ramach
Drgania i fale II rok Fizyk BC
 00--07 5:34 00\FIN00\Drgzlo00.doc Drgania złożone Zasada superpozycji: wychylenie jest sumą wychyleń wywołanych przez poszczególne czynniki osobno. Zasada wynika z liniowości związku między wychyleniem
00--07 5:34 00\FIN00\Drgzlo00.doc Drgania złożone Zasada superpozycji: wychylenie jest sumą wychyleń wywołanych przez poszczególne czynniki osobno. Zasada wynika z liniowości związku między wychyleniem
Ć w i c z e n i e K 4
 Akademia Górniczo Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości, Zmęczenia Materiałów i Konstrukcji Nazwisko i Imię: Nazwisko i Imię: Wydział Górnictwa i Geoinżynierii Grupa
Akademia Górniczo Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości, Zmęczenia Materiałów i Konstrukcji Nazwisko i Imię: Nazwisko i Imię: Wydział Górnictwa i Geoinżynierii Grupa
DRGANIA MECHANICZNE. Poniższe materiały tylko dla studentów uczęszczających na zajęcia. Zakaz rozpowszechniania i powielania bez zgody autora.
 DRGANIA MECHANICZNE materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak część 3 drgania wymuszone siłą harmoniczną drgania
DRGANIA MECHANICZNE materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak część 3 drgania wymuszone siłą harmoniczną drgania
a, F Włodzimierz Wolczyński sin wychylenie cos cos prędkość sin sin przyspieszenie sin sin siła współczynnik sprężystości energia potencjalna
 Włodzimierz Wolczyński 3 RUCH DRGAJĄCY. CZĘŚĆ 1 wychylenie sin prędkość cos cos przyspieszenie sin sin siła współczynnik sprężystości sin sin 4 3 1 - x. v ; a ; F v -1,5T,5 T,75 T T 8t x -3-4 a, F energia
Włodzimierz Wolczyński 3 RUCH DRGAJĄCY. CZĘŚĆ 1 wychylenie sin prędkość cos cos przyspieszenie sin sin siła współczynnik sprężystości sin sin 4 3 1 - x. v ; a ; F v -1,5T,5 T,75 T T 8t x -3-4 a, F energia
Laboratorium Dynamiki Maszyn
 Laboratorium Dynamiki Maszyn Laboratorium nr 5 Temat: Badania eksperymentane drgań wzdłużnych i giętnych układów mechanicznych Ce ćwiczenia:. Zbudować mode o jednym stopniu swobody da zadanego układu mechanicznego.
Laboratorium Dynamiki Maszyn Laboratorium nr 5 Temat: Badania eksperymentane drgań wzdłużnych i giętnych układów mechanicznych Ce ćwiczenia:. Zbudować mode o jednym stopniu swobody da zadanego układu mechanicznego.
Karta (sylabus) przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia. Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu:
 przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia. Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu:") Karta (sylabus) przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia Przedmiot: Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu: MT 1 S 0 2 14-0_1 Rok: I Semestr: II Forma
Karta (sylabus) przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia Przedmiot: Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu: MT 1 S 0 2 14-0_1 Rok: I Semestr: II Forma
Wyznaczanie współczynnika sprężystości sprężyn i ich układów
 Ćwiczenie 63 Wyznaczanie współczynnika sprężystości sprężyn i ich układów 63.1. Zasada ćwiczenia W ćwiczeniu określa się współczynnik sprężystości pojedynczych sprężyn i ich układów, mierząc wydłużenie
Ćwiczenie 63 Wyznaczanie współczynnika sprężystości sprężyn i ich układów 63.1. Zasada ćwiczenia W ćwiczeniu określa się współczynnik sprężystości pojedynczych sprężyn i ich układów, mierząc wydłużenie
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia drugiego stopnia
 modułu/przedmiotu Mechanika i Budowa Maszyn Studia drugiego stopnia") Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia drugiego stopnia Przedmiot: Mechanika analityczna Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: MBM 2 S 0 1 02-0_1 Rok: 1 Semestr: 1
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia drugiego stopnia Przedmiot: Mechanika analityczna Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: MBM 2 S 0 1 02-0_1 Rok: 1 Semestr: 1
1. Kinematyka 8 godzin
 Plan wynikowy (propozycja) część 1 1. Kinematyka 8 godzin Wymagania Treści nauczania (tematy lekcji) Cele operacyjne podstawowe ponadpodstawowe Uczeń: konieczne podstawowe rozszerzające dopełniające Jak
Plan wynikowy (propozycja) część 1 1. Kinematyka 8 godzin Wymagania Treści nauczania (tematy lekcji) Cele operacyjne podstawowe ponadpodstawowe Uczeń: konieczne podstawowe rozszerzające dopełniające Jak
Ruch drgający. Ruch harmoniczny prosty, tłumiony i wymuszony
 Ruch drgający Ruch harmoniczny prosty, tłumiony i wymuszony Ruchem drgającym nazywamy ruch ciała zachodzący wokół stałego położenia równowagi. Ruchy drgające dzielimy na ruchy: okresowe, nieokresowe. Ruch
Ruch drgający Ruch harmoniczny prosty, tłumiony i wymuszony Ruchem drgającym nazywamy ruch ciała zachodzący wokół stałego położenia równowagi. Ruchy drgające dzielimy na ruchy: okresowe, nieokresowe. Ruch
10 K A T E D R A FIZYKI STOSOWANEJ
 10 K A T E D R A FIZYKI STOSOWANEJ P R A C O W N I A F I Z Y K I Ćw. 10. Wyznaczanie momentu bezwładności brył nieregularnych Wprowadzenie Obserwowane w przyrodzie ruchy ciał można opisać * stosując podział
10 K A T E D R A FIZYKI STOSOWANEJ P R A C O W N I A F I Z Y K I Ćw. 10. Wyznaczanie momentu bezwładności brył nieregularnych Wprowadzenie Obserwowane w przyrodzie ruchy ciał można opisać * stosując podział
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
D103. Wahadła fizyczne sprzężone (przybliżenie małego kąta).
.") D3. Wahadła fizyczne sprzężone (przybliżenie małego kąta). Cel: Zbadanie przebiegu drgań dwóch wahadeł sprzężonych: zbadanie zależności częstości drgań wahadła prostego od jego momentu bezwładności, wyznaczenie
D3. Wahadła fizyczne sprzężone (przybliżenie małego kąta). Cel: Zbadanie przebiegu drgań dwóch wahadeł sprzężonych: zbadanie zależności częstości drgań wahadła prostego od jego momentu bezwładności, wyznaczenie
WYKŁAD 3. Rozdział 2: Drgania układu liniowego o jednym stopniu swobody. Część 2 Drgania z wymuszeniem harmonicznym
 WYKŁAD 3 Rozdział : Drgania układu liniowego o jednym stopniu swobody Część Drgania z wymuszeniem harmonicznym.5. Istota i przykłady drgań wymuszonych Drgania wymuszone to drgania, których energia wynika
WYKŁAD 3 Rozdział : Drgania układu liniowego o jednym stopniu swobody Część Drgania z wymuszeniem harmonicznym.5. Istota i przykłady drgań wymuszonych Drgania wymuszone to drgania, których energia wynika
Rozwiązania zadań egzaminacyjnych (egzamin poprawkowy) z Mechaniki i Szczególnej Teorii Względności
 z Mechaniki i Szczególnej Teorii Względności") Rozwiązania zadań egzaminacyjnych (egzamin poprawkowy) z Mechaniki i Szczególnej Teorii Względności Zadanie 1 (7 pkt) Cząstka o masie m i prędkości v skierowanej horyzontalnie wpada przez bocznąściankę
Rozwiązania zadań egzaminacyjnych (egzamin poprawkowy) z Mechaniki i Szczególnej Teorii Względności Zadanie 1 (7 pkt) Cząstka o masie m i prędkości v skierowanej horyzontalnie wpada przez bocznąściankę
Fizyka 12. Janusz Andrzejewski
 Fizyka 1 Janusz Andrzejewski Przypomnienie: Drgania procesy w których pewna wielkość fizyczna na przemian maleje i rośnie Okresowy ruch drgający (periodyczny) - jeżeli wartości wielkości fizycznych zmieniające
Fizyka 1 Janusz Andrzejewski Przypomnienie: Drgania procesy w których pewna wielkość fizyczna na przemian maleje i rośnie Okresowy ruch drgający (periodyczny) - jeżeli wartości wielkości fizycznych zmieniające
Bryła sztywna. Fizyka I (B+C) Wykład XXII: Porównanie ruchu obrotowego z ruchem postępowym. Bak Precesja Żyroskop
 Wykład XXII: Porównanie ruchu obrotowego z ruchem postępowym. Bak Precesja Żyroskop") Bryła sztywna Wykład XXII: Fizyka I (B+C) Porównanie ruchu obrotowego z ruchem postępowym Bak Precesja Żyroskop Ogólne wyrażenie na moment pędu Tensor momentu bezwładności Osie główne Porównanie Punkt
Bryła sztywna Wykład XXII: Fizyka I (B+C) Porównanie ruchu obrotowego z ruchem postępowym Bak Precesja Żyroskop Ogólne wyrażenie na moment pędu Tensor momentu bezwładności Osie główne Porównanie Punkt
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
Badania doświadczalne drgań własnych nietłumionych i tłumionych
 Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny Politechnika Śląska www.imio.polsl.pl fb.com/imiopolsl twitter.com/imiopolsl LABORATORIUM WYTRZYMAŁOŚCI MATERIAŁÓW Badania
Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny Politechnika Śląska www.imio.polsl.pl fb.com/imiopolsl twitter.com/imiopolsl LABORATORIUM WYTRZYMAŁOŚCI MATERIAŁÓW Badania
Katedra Mechaniki Konstrukcji ĆWICZENIE PROJEKTOWE NR 1 Z MECHANIKI BUDOWLI
 Katedra Mechaniki Konstrukcji Wydział Budownictwa i Inżynierii Środowiska Politechniki Białostockiej... (imię i nazwisko)... (grupa, semestr, rok akademicki) ĆWICZENIE PROJEKTOWE NR Z MECHANIKI BUDOWLI
Katedra Mechaniki Konstrukcji Wydział Budownictwa i Inżynierii Środowiska Politechniki Białostockiej... (imię i nazwisko)... (grupa, semestr, rok akademicki) ĆWICZENIE PROJEKTOWE NR Z MECHANIKI BUDOWLI
VII.1 Pojęcia podstawowe.
 II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
INSTRUKCJA do ćwiczenia Wyważanie wirnika maszyny w łożyskach własnych
 ZAKŁAD PODSTAW KONSTRUKCJI I EKSPLOATACJI MASZYN ENERGETYCZNYCH Instytut Maszyn i Urządzeń Energetycznych Politechnika Śląska INSTRUKCJA do ćwiczenia Wyważanie wirnika maszyny w łożyskach własnych Wprowadzenie
ZAKŁAD PODSTAW KONSTRUKCJI I EKSPLOATACJI MASZYN ENERGETYCZNYCH Instytut Maszyn i Urządzeń Energetycznych Politechnika Śląska INSTRUKCJA do ćwiczenia Wyważanie wirnika maszyny w łożyskach własnych Wprowadzenie
ODKSZTAŁCENIA I ZMIANY POŁOŻENIA PIONOWEGO RUROCIĄGU PODCZAS WYDOBYWANIA POLIMETALICZNYCH KONKRECJI Z DNA OCEANU
 Górnictwo i Geoinżynieria Rok 35 Zeszyt 4/1 2011 Katarzyna Żelazny*, Tadeusz Szelangiewicz* ODKSZTAŁCENIA I ZMIANY POŁOŻENIA PIONOWEGO RUROCIĄGU PODCZAS WYDOBYWANIA POLIMETALICZNYCH KONKRECJI Z DNA OCEANU
Górnictwo i Geoinżynieria Rok 35 Zeszyt 4/1 2011 Katarzyna Żelazny*, Tadeusz Szelangiewicz* ODKSZTAŁCENIA I ZMIANY POŁOŻENIA PIONOWEGO RUROCIĄGU PODCZAS WYDOBYWANIA POLIMETALICZNYCH KONKRECJI Z DNA OCEANU
Mgr inż. Wojciech Chajec Pracownia Kompozytów, CNT Mgr inż. Adam Dziubiński Pracownia Aerodynamiki Numerycznej i Mechaniki Lotu, CNT SMIL
 Mgr inż. Wojciech Chajec Pracownia Kompozytów, CNT Mgr inż. Adam Dziubiński Pracownia Aerodynamiki Numerycznej i Mechaniki Lotu, CNT SMIL We wstępnej analizie przyjęto następujące założenia: Dwuwymiarowość
Mgr inż. Wojciech Chajec Pracownia Kompozytów, CNT Mgr inż. Adam Dziubiński Pracownia Aerodynamiki Numerycznej i Mechaniki Lotu, CNT SMIL We wstępnej analizie przyjęto następujące założenia: Dwuwymiarowość
Rys. II.9.1 Schemat stanowiska laboratoryjnego
 9. Identyfikacja modelu dynamicznego. Ćwiczenie ilustruje możliwości wykorzystania zaawansowanych technik pomiarowych do rozwiązywania praktycznych zadań inżynierskich. Za przykład posłużył obiekt w postaci
9. Identyfikacja modelu dynamicznego. Ćwiczenie ilustruje możliwości wykorzystania zaawansowanych technik pomiarowych do rozwiązywania praktycznych zadań inżynierskich. Za przykład posłużył obiekt w postaci
RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA
 Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
LASERY I ICH ZASTOSOWANIE
 LASERY I ICH ZASTOSOWANIE Laboratorium Instrukcja do ćwiczenia nr 3 Temat: Efekt magnetooptyczny 5.1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z metodą modulowania zmiany polaryzacji światła oraz
LASERY I ICH ZASTOSOWANIE Laboratorium Instrukcja do ćwiczenia nr 3 Temat: Efekt magnetooptyczny 5.1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z metodą modulowania zmiany polaryzacji światła oraz
1. Wahadło fizyczne o regulowanej płaszczyźnie. drgań. kilkukrotnie sprawdzając z jaką niepewnością statystyczną możemy mieć do czynienia. pomiarze.
 . Wahadło fizyczne o regulowanej płaszczyźnie drgań.. Cel ćwiczenia Cel ćwiczenia: Analiza drgań harmonicznych na przykładzie wahadła fizycznego. Sprawdzenie relacji między okresem drgań obliczonym a okresem
. Wahadło fizyczne o regulowanej płaszczyźnie drgań.. Cel ćwiczenia Cel ćwiczenia: Analiza drgań harmonicznych na przykładzie wahadła fizycznego. Sprawdzenie relacji między okresem drgań obliczonym a okresem
DYNAMIKA KONSTRUKCJI BUDOWLANYCH
 DYNAMIKA KONSTRUKCJI BUDOWLANYCH Roman Lewandowski Wydawnictwo Politechniki Poznańskiej, Poznań 2006 Książka jest przeznaczona dla studentów wydziałów budownictwa oraz inżynierów budowlanych zainteresowanych
DYNAMIKA KONSTRUKCJI BUDOWLANYCH Roman Lewandowski Wydawnictwo Politechniki Poznańskiej, Poznań 2006 Książka jest przeznaczona dla studentów wydziałów budownictwa oraz inżynierów budowlanych zainteresowanych
Politechnika Białostocka
 Politechnika Białostocka WYDZIAŁ BUDOWNICTWA I INŻYNIERII ŚRODOWISKA Katedra Geotechniki i Mechaniki Konstrukcji Wytrzymałość Materiałów Instrukcja do ćwiczeń laboratoryjnych Ćwiczenie nr 6 Temat ćwiczenia:
Politechnika Białostocka WYDZIAŁ BUDOWNICTWA I INŻYNIERII ŚRODOWISKA Katedra Geotechniki i Mechaniki Konstrukcji Wytrzymałość Materiałów Instrukcja do ćwiczeń laboratoryjnych Ćwiczenie nr 6 Temat ćwiczenia:
W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ
 POLITECHNIKA BIAŁOSTOCKA Wydział Budownictwa i Inżynierii Środowiska Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: POWIERZCHNIA SWOBODNA CIECZY W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ Ćwiczenie
POLITECHNIKA BIAŁOSTOCKA Wydział Budownictwa i Inżynierii Środowiska Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: POWIERZCHNIA SWOBODNA CIECZY W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ Ćwiczenie
dr inż. Paweł Szeptyński materiały pomocnicze do przedmiotu MECHANIKA TEORETYCZNA DYNAMIKA - ZADANIA
 NAZEWNICTWO LINIOWE RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE O STAŁYCH WSPÓŁCZYNNIKACH d n u a n d x + a d n 1 u n n 1 d x +... + a d 2 u n 1 2 d x + a d u 2 1 d x + a u = b( x) Powyższe równanie o niewiadomej funkcji
NAZEWNICTWO LINIOWE RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE O STAŁYCH WSPÓŁCZYNNIKACH d n u a n d x + a d n 1 u n n 1 d x +... + a d 2 u n 1 2 d x + a d u 2 1 d x + a u = b( x) Powyższe równanie o niewiadomej funkcji
Elementy dynamiki mechanizmów
 Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
WYKAZ TEMATÓW Z LABORATORIUM DRGAŃ MECHANICZNYCH dla studentów semestru IV WM
 WYKAZ TEMATÓW Z LABORATORIUM DRGAŃ MECHANICZNYCH dla studentów semestru IV WM 1. Wprowadzenie do zajęć. Równania Lagrange'a II rodzaju Ćwiczenie wykonywane na podstawie rozdziału 3 [1] 2. Drgania swobodne
WYKAZ TEMATÓW Z LABORATORIUM DRGAŃ MECHANICZNYCH dla studentów semestru IV WM 1. Wprowadzenie do zajęć. Równania Lagrange'a II rodzaju Ćwiczenie wykonywane na podstawie rozdziału 3 [1] 2. Drgania swobodne
TEORIA DRGAŃ Program wykładu 2016
 TEORIA DRGAŃ Program wykładu 2016 I. KINEMATYKA RUCHU POSTE POWEGO 1. Ruch jednowymiarowy 1.1. Prędkość (a) Prędkość średnia (b) Prędkość chwilowa (prędkość) 1.2. Przyspieszenie (a) Przyspieszenie średnie
TEORIA DRGAŃ Program wykładu 2016 I. KINEMATYKA RUCHU POSTE POWEGO 1. Ruch jednowymiarowy 1.1. Prędkość (a) Prędkość średnia (b) Prędkość chwilowa (prędkość) 1.2. Przyspieszenie (a) Przyspieszenie średnie
MECHANIKA 2. Zasady pracy i energii. Wykład Nr 12. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 12 Zasady pracy i energii Prowadzący: dr Krzysztof Polko WEKTOR POLA SIŁ Wektor pola sił możemy zapisać w postaci: (1) Prawa strona jest gradientem funkcji Φ, czyli (2) POTENCJAŁ
MECHANIKA 2 Wykład Nr 12 Zasady pracy i energii Prowadzący: dr Krzysztof Polko WEKTOR POLA SIŁ Wektor pola sił możemy zapisać w postaci: (1) Prawa strona jest gradientem funkcji Φ, czyli (2) POTENCJAŁ
MECHANIKA II. Drgania wymuszone
 MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
Wykład 6 Drgania. Siła harmoniczna
 Wykład 6 Drgania Ruch, który powtarza się w regularnych odstępach czasu, nazywamy ruchem okresowym (periodycznym). Przemieszczenie cząstki w ruchu periodycznym można wyrazić za pomocą funkcji sinus albo
Wykład 6 Drgania Ruch, który powtarza się w regularnych odstępach czasu, nazywamy ruchem okresowym (periodycznym). Przemieszczenie cząstki w ruchu periodycznym można wyrazić za pomocą funkcji sinus albo