Sterowanie minimalnoczasowe dla uk ladów liniowych. Krzywe prze l aczeń.
|
|
|
- Bartłomiej Dąbrowski
- 9 lat temu
- Przeglądów:
Transkrypt
1 Sterowanie minimalnoczasowe dla uk ladów liniowych. Krzywe prze l aczeń. Sprowadzanie zadań sterowania optymalnego do zadań wariacyjnych metod a funkcji kary i mnożników Lagrange a - zadania sterowania optymalnego z ograniczeniami chwilowymi sterowania i z uwik lanym sterowaniem w równaniach stanu Rozważmy zadanie optymalnego sterowania docelowego z uwik lanym sterowaniem w równaniach stanu i z ograniczeniami chwilowymi sterowania: zminimalizować wskaźnik jakości G(x, u) = uwzglȩdniaj ac równanie stanu warunki graniczne t1 oraz ograniczenia chwilowe sterowania t 0 g(x(t), u(t), t)dt ẋ(t) = f(x(t), u(t), t), t [t 0, t 1 ], x(t 0 ) = x 0, x(t 1 ) = x 1 u(t) U, t [t 0, t 1 ]. Za lóżmy chwilowe ograniczenia w postaci u(t) u max, t [t 0, t 1 ]. Wprowadzamy kwadratow a funkcjȩ kary za przekroczenie ograniczeń chwilowych K j (u j (t)) = { 0 gdy u j (t) u max j, ρ j ( u j (t) u max j ) gdy u j (t) > u max j, gdzie ρ j > 0 jest wspó lczynnikiem kary. Wraz ze wzrostem wspó lczynnika kary ρ j + funkcja kary staje siȩ coraz bardziej stroma i tym samym coraz dok ladniejsza. 1
 = uwzglȩdniaj ac równanie stanu warunki graniczne t1 oraz ograniczenia chwilowe sterowania t 0 g(x(t), u(t), t)dt ẋ(t) = f(x(t), u(t), t), t [t 0, t 1 ], x(t 0 ) = x 0, x(t 1 ) = x 1 u(t) U,")
2 Stosuj ac metodȩ funkcyjnych mnożników Lagrange a λ(t) dla równań stanu i funkcjȩ kary K(u(t)). = m j=1 K j(u j (t)) dla ograniczeń chwilowych sterowania w l aczamy te ograniczenia do wskaźnika jakości G(x, λ, u). = t1 t 0 ( g(x(t), u(t), t) + λ T (t)(ẋ(t) f(x(t), u(t), t)) + K(u(t)) ) dt minimalizowanego przy jedynych pozosta lych ograniczeniach jakimi s a warunki graniczne x(t 0 ) = x 0, x(t 1 ) = x 1. Tak wiȩc rozszerzamy zakres zmiennych do postaci wektora zmiennych funkcyjnych (x, λ, u) traktuj ac je jako równoprawne zmienne optymalizacyjne z przestrzeni C 1. Warunki konieczne optymalności określimy definiuj ac funkcjȩ g jak nastȩpuje g(x(t), ẋ(t), λ(t), λ(t), u(t), u(t), t) = g(x(t), u(t), t) + λ T (t)(ẋ(t) f(x(t), u(t), t)) + K(u(t)) i zapisujemy warunki konieczne optymalności w postaci nastȩpuj acego uk ladu równań Eulera-Lagrange a równanie optymalnego kostanu (równanie sprzȩżone) równanie optymalnego stanu g o x(t) d dt gȯ x(t) = 0, t [t 0, t 1 ], ( ) g o λ(t) d dt gȯ λ (t) = 0, t [t 0, t 1 ], ( ) równanie optymalnego sterowania g u(t) o d dt gȯ u(t) = 0, t [t 0, t 1 ], ( ). Jest to uk lad n + m równań różniczkowych dla n + m zmiennych funkcyjnych. Mnożnik funkcyjny λ(t) nazywany jest w zadaniach sterowania optymalnego zmienn a kostanu (wektorem kostanu) lub zmienn a sprzȩżon a (wektorem zmiennych sprzȩżonych). Uk lad tych równań pozwala dla niektórych klas problemów sterowania optymalnego efektywnie sparametryzować sterowanie
 traktuj ac je jako równoprawne zmienne optymalizacyjne z przestrzeni C 1.")
3 optymalne, co u latwia jego dookreślenie za pomoc a prostego dodatkowego algorytmu obliczeniowego. Minimalnoczasowe sterowanie docelowe dla uk ladów liniowych Zadanie polega na minimalizacji czasu realizacji procesu docelowego G(x, u) = t1 t 0 dt = t 1 t 0 z uwzglȩdnieniem liniowego stacjonarnego równania stanu uk ladu ẋ(t) = Ax(t) + Bu(t), t [t 0, t 1 ], warunków dwugranicznych x(t 0 ) = x 0, x(t 1 ) = x 1 oraz ograniczeń chwilowych sterowania u(t) u max, t [t 0, t 1 ]. Rozszerzamy zestaw zmiennych i zapisujemy zmodyfikowany wskaźnik jakości G(x, λ, u) = t1 t 0 ( 1 + λ T (t)(ẋ(t) Ax(t) Bu(t)) + K(u(t)) ) dt. W tym przypadku funkcja g przybiera postać g(x(t), ẋ(t), λ(t), λ(t), u(t), u(t), t) = 1+λ T (t)(ẋ(t) Ax(t) Bu(t))+K(u(t)). Obliczamy pochodne funkcji g g x = λ T (t)a, gẋ = λ T (t), g λ = (ẋ(t) Ax(t) Bu(t)) T, g λ = 0, g u = λ T (t)b + K u (u(t)), g u = 0. Zapisujemy uk lad równań Eulera-Lagrange a 3
![równania stanu uk ladu ẋ(t) = Ax(t) + Bu(t), t [t 0, t 1 ], warunków dwugranicznych x(t 0 ) = x 0, x(t 1 ) = x 1 oraz ograniczeń chwilowych sterowania u(t) u max, t [t 0, t 1 ].](/docs-images/46/8753376/images/page_3.jpg "Rozszerzamy zestaw zmiennych i zapisujemy zmodyfikowany wskaźnik jakości G(x, λ, u) = t1 t 0 ( 1 + λ T (t)(ẋ(t) Ax(t) Bu(t)) + K(u(t)) ) dt.")
4 równanie optymalnego kostanu równanie optymalnego stanu λ T (t)a λ T (t) = 0, ẋ(t) Ax(t) Bu(t) = 0, równanie optymalnego sterowania λ T (t)b + K u (u(t)) = 0. Ostatnie równanie można przepisać w postaci uk ladu równań skalarnych dla poszczególnych zmiennych steruj acych K j,uj (u j (t)) = n λ i (t)b ij, j = 1,..., m. i=1 Tak wiȩc optymalne przebiegi zmiennych steruj acych określone s a dla zależnościami u o j(t) = u max j sign( n λ i (t)b ij ), j = 1,..., m. Ponieważ charakter rozwi azania równania sprzȩżonego i=1 λ(t) = A T λ(t) zależy od charakteru wartości w lasnych macierzy stanu A, wiȩc również i postać sterowania optymalnego zależy od tych wartości. Jeśli wartości w lasne s 1, s,..., s n macierzy stanu A s a rzeczywiste jednokrotne, to zmienne sprzȩżone s a sumami eksponent λ i (t) = C i1 e s 1t + C i e s t C in e snt, t [t 0, t 1 ], i = 1,..., n. Lemat: Suma n eksponent może zmieniać znak w przedziale [t 0, t 1 ] nie wiȩcej niż n 1 razy. Wniosek: Sterowanie minimalnoczasowe dla uk ladu liniowego, którego macierz stanu posiada wartości w lasne rzeczywiste jednokrotne, przyjmuje wartości +u max j lub u max j i zmienia znak w przedziale [t 0, t 1 ] nie wiȩcej niż n 1 razy. Mówimy, że sterowanie optymalne jest w tym przypadku typu przekaźnikowego lub typu bang- bang. 4
 = A T λ(t) zależy od charakteru wartości w lasnych macierzy stanu A, wiȩc również i postać sterowania optymalnego zależy od tych wartości.")
5 Wniosek ten obowi azuje także dla przypadku wielokrotnych rzeczywistych wartości w lasnych macierzy stanu A, gdyż suma n eksponent mnożonych przez funkcje potȩgowe również zmienia znak w przedziale [t 0, t 1 ] nie wiȩcej niż n 1 razy. Przyk lad: Minimalnoczasowe sterowanie tarcz a obrotow a tarcza obrotowa θ(t), Ω(t) U(t) silnik rewersyjny przek ladnia zmienna steruj aca - napiȩcie obwodu steruj acego silnika u(t) = U(t), zmienne stanu - po lożenie k atowe tarczy x 1 (t) = θ(t), prȩdkość k atowa tarczy x (t) = Ω(t). Zadanie minimalnoczasowego sterowania docelowego tarcz a obrotow a polega na minimalizacji wskaźnika jakości G(x, u) = z uwzglȩdnieniem równań stanu ẋ 1 (t) = x (t), ẋ (t) = bu(t), t [0, t 1 ], warunków dwugranicznych x i (0) = x i0, x i (t 1 ) = x i1, oraz ograniczeń amplitudy sterowania u(t) 1, t [0, t 1 ]. W tym przypadku równanie wartości w lasnych det(si A) = 0 przyjmuje postać s = 0, a zatem macierz stanu posiada podwójn a zerow a wartość w lasn a. oznacza to, że sterowanie minimalnoczasowe tarcz a obrotow a jest typu przekaźnikowego i zmienia znak nie wiȩcej niż 1 raz w przedziale [0, t 1 ]. Aby przedstawić algorytm wyznaczania konkretnego przebiegu sterowania minimalnoczasowego dla rozważanego obiektu określimy postać trajektorii stanu dla sterowania optymalnego u o (t) = ±1 przy dowolnych warunkach 5 t1 0 dt
 = θ(t), prȩdkość k atowa tarczy x (t) = Ω(t).")
6 pocz atkowych x 1 (0) = x 10, x (0) = x 0 i zerowych warunkach końcowych x 1 (t 1 ) = 0, x (t 1 ) = 0. Ca lkuj ac równania stanu ze sterowaniem u o (t) = ±1 uzyskujemy x (t) = C 1 ± t, x 1 (t) = C + C 1 t ± 0.5t. Z warunków pocz atkowych wynika, że x (0) = C 1 C 1 = x 0, x 1 (0) = C C = x 10. Przebiegi wspó lrzȩdnych stanu w funkcji czasu można zapisać jak nastȩpuje x 1 (t) = 0.5t + x 0 t + x 10, x (t) = ±t + x 0. Eliminujemy czas z tych zależności 0.5x (t) = 0.5(x 0 ± t) = 0.5(x 0 ± x 0 t + t ) = 0.5x 0 ± x 0 t + 0.5t czyli 0.5x (t) 0.5x 0 = 0.5t ± x 0 t i Ponieważ ±0.5x 0.5x 0 = ±0.5t + x 0 t. x 1 (t) x 10 = ±0.5t + x 0 t, wiȩc miȩdzy wspó lrzȩdnymi stanu x 1 i x zachodzi zwi azek x 1 = ±0.5x 0.5x 0 + x 10. Oznacza to, że trajektorie stanu uk ladu ze sterowaniem optymalnym s a parabolami jako funkcje x 1 (x ), przy czym dla sterowania u o (t) = +1 mamy x 1 = 0.5x 0.5x 0 + x 10, a dla sterowania u o (t) = 1 mamy x 1 = 0.5x + 0.5x 0 + x 10. 6
 = 0.5x 0 ± x 0 t + 0.5t czyli 0.5x (t) 0.5x 0 = 0.5t ± x 0 t i Ponieważ ±0.5x 0.5x 0 = ±0.5t + x 0 t. x 1 (t) x 10 = ±0.")
7 Punkt pocz atkowy trajektorii stanu określony jest przez warunki pocz atkowe (x 10, x 0 ). Wyróżnimy nastȩpuj ace trzy charakterystyczne obszary p laszczyzny stanu: krzywa prze l aczeń P jest zbiorem punktów (x 1, x ) spe lniaj acych równanie x 1 = 0.5x sign(x ), obszar nad krzyw a prze l aczeń S jest zbiorem punktów (x 1, x ) spe lniaj acych nierówność x 1 > 0.5x sign(x ), obszar pod krzyw a prze l aczeń S + jest zbiorem punktów (x 1, x ) spe lniaj acych nierówność x 1 < 0.5x sign(x ). Sterowanie minimalnoczasowe w uk ladzie otwartym określane jest w nastȩpuj acy sposób: jeśli punkt pocz atkowy trajektorii stanu znajduje siȩ na krzywej prze l aczeń, to u o (t) = +1, t [0, t 1 ] jeśli x 0 i u o (t) = 1, t [t 0, t 1 ] jeśli x 0, jeśli punkt pocz atkowy trajektorii stanu znajduje siȩ nad krzyw a prze l aczeń, to u o (t) = 1, t [0, t) aż do momentu t osi agniȩcia krzywej prze l aczeń - wtedy nastȩpuje prze l aczenie na u o (t) = +1, t [ t, t 1 ], jeśli punkt pocz atkowy trajektorii stanu znajduje siȩ pod krzyw a prze l aczeń, to u o (t) = +1, t [0, t) aż do momentu t osi agniȩcia krzywej prze l aczeń - wtedy nastȩpuje prze l aczenie na u o (t) = 1, t [ t, t 1 ]. Prosta postać analityczna krzywej prze l aczeń pozwala latwo określić sterowanie minimalnoczasowe w uk ladzie zamkniȩtym jeśli ϑ(x 1, x ) 0, ϑ(x 1, x ) trajektorii stanu znajduje siȩ poza krzyw a prze l aczeń), to. = x x sign(x ) (punkt bież acy u o (x 1, x ) = sign(ϑ(x 1, x )), jeśli ϑ(x 1, x ) = 0 (punkt bież acy trajektorii stanu znajduje siȩ na krzywej 7
,")
8 prze l aczeń), to u o (x 1, x ) = sign(x ). Sterowanie minimalnoczasowe w rozważanym uk ladzie może być realizowane z użyciem programowalnej karty szybkiego przetwarzania (fast processing programmable cards - Industrial Instruments) implementuj acej algorytm sprzȩżenia zwrotnego. Programowalna karta szybkiego przetwarzania sterowanie Obiekt sterowania wyjście US OS 8
 implementuj acej algorytm sprzȩżenia zwrotnego.")
9 Jeśli wartości w lasne s 1, s,..., s n macierzy stanu A s a zespolone, to zmienne sprzȩżone s a funkcjami oscylacyjnymi i w zwi azku z tym sterowanie minimalnoczasowe może mieć wiȩcej niż n 1 prze l aczeń. Przyk lad: minimalnoczasowe sprowadzanie oscylatora idealnego do po lożenia równowagi. ściana podstawowa amortyzator sprȩżynowy Obiekt sterowania M si la stabilizuj aca Uk lad o charakterze oscylatora idealnego jest opisywany równaniami stanu ẋ 1 (t) = x (t), ẋ (t) = a 1 x 1 (t) + u(t), t [0, t 1 ], z warunkami granicznymi x i (0) = x i0, x i (t 1 ), i = 1, i z ograniczeniami chwilowymi sterowania u(t) 1, gdzie a 1 jest wspó lczynnikiem amortyzatora sprȩżynowego. Dla celów analizy w lasności matematycznych modelu uk ladu użyteczna jest symetryzacja równań stanu uzyskiwana przez podstawienia ω = a 1, x 1 (t) := x 1 (t)/ω. Równania stanu oscylatora idealnego ze sterowaniem po symetryzacji przybieraj a postać ẋ 1 (t) = ωx (t), ẋ = ωx 1 (t) + u(t), t [0, t 1 ]. W tym przypadku macierze stanu, kostanu i sterowania można zapisać nastȩpuj aco: ( ) ( ) ( ) 0 ω A =, A T 0 ω 0 =, B = ω 0 ω 0 1 9
 = x (t), ẋ (t) = a 1 x 1 (t) +")
10 Równanie optymalnego kostanu λ(t) = A T λ T (t) implikuje dla zmiennych sprzȩżonych równania λ 1 (t) = ωλ (t), λ (t) = ωλ 1 (t). Uk lad ten można zredukować do pojedynczego równania drugiego rzȩdu z równaniem charakterystycznym λ 1 (t) = ω λ 1 (t) r = ω, r 1, = ±jω. Oznacza to, że zmienne sprzȩżone s a w tym przypadku okresowymi funkcjami czasu i w szczególności λ (t) = αsin(ωt + β). Z równania optymalnego sterowania uzyskujemy K u (u(t)) = λ (t). Wynika st ad, że przebieg sterowania minimalnoczasowego jest określony zależności a u o (t) = sign(αsin(ωt + β)). Wnioski z równania sterowania minimalnoczasowego: Sterowanie minimalnoczasowe oscylatora idealnego przyjmuje wartości +1 lub 1 (jest typu bang-bang). Czas sta lości sterowania minimalnoczasowego na poziomie +1 lub 1 nie może być d luższy niż π/ω jednostek czasu (okres drgań badanego oscylatora wynosi π/ω, a czas przebiegu po lowy okrȩgu wynosi π/ω). Tylko pierwszy i ostatni przedzia l sta lości sterowania może być mniejszy od π/ω, a wszystkie pośrednie przedzia ly (jeśli wszystkich przedzia lów sta lości sterowania jest wiȩcej niż dwa) musz a być równe π/ω. Liczba prze l aczeń sterowania minimalnoczasowego może nieograniczenie narastać wraz ze wzrostem czȩstotliwości sterowania. 10
 = sign(αsin(ωt + β)).")
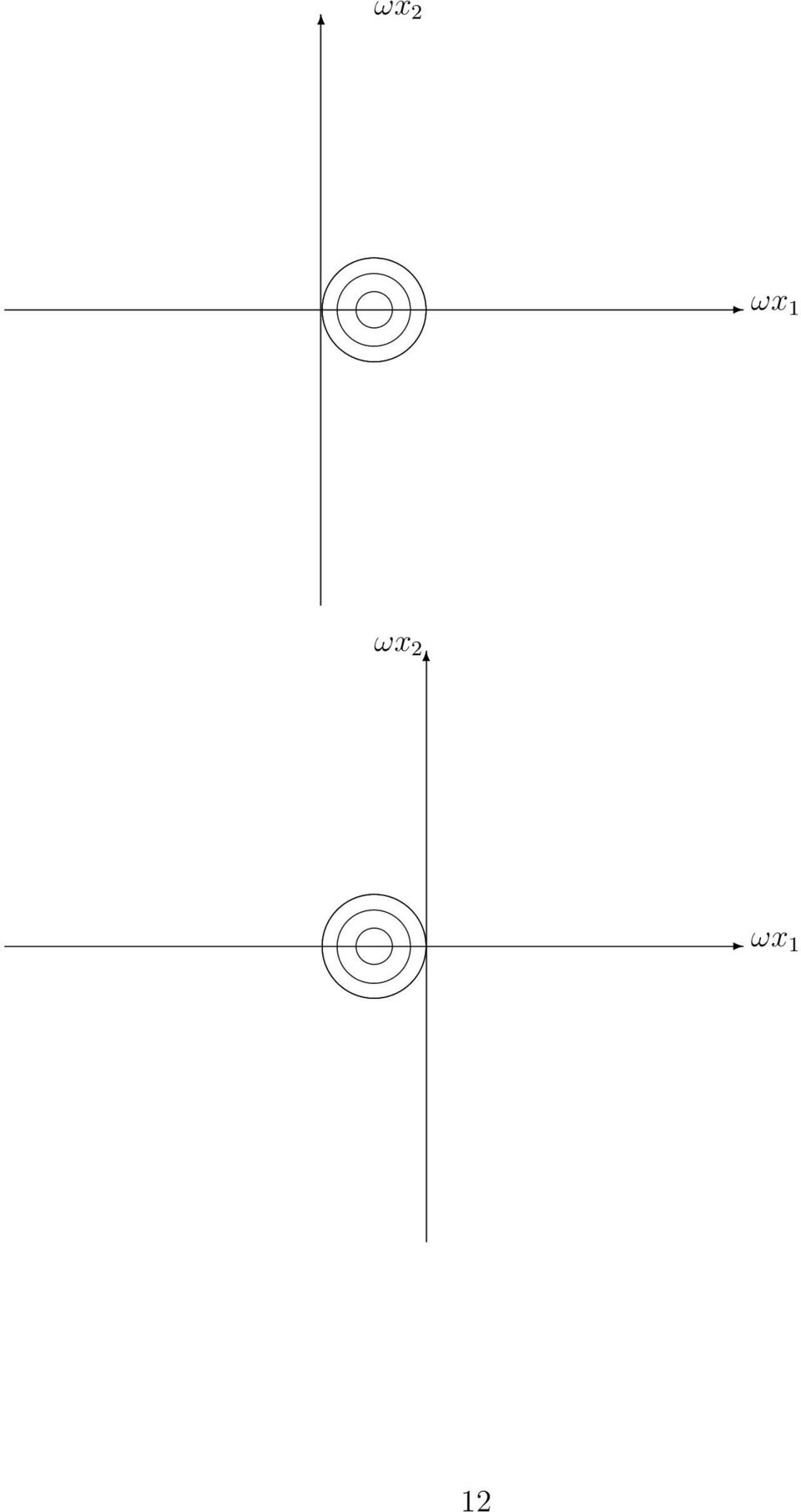
11 Kszta lt trajektorii stanu oscylatora idealnego ze sterowaniem u = +1: ẋ 1 (t) = ωx (t), ẋ (t) = ωx 1 (t) + 1 ẍ 1 (t) = ω x 1 (t) + ω x 1 (t) = 1/ω + c 1 cos ωt + (c /ω)sin ωt, x (t) = c 1 ωsin ωt + c cos ωt x 10 = c 1 + 1/ω; x 0 = c ω x 1 (t) = 1/ω + (x 10 1/ω)cos ωt + x 0 sin ωt, x (t) = (x 10 1/ω)sin ωt + x 0 cos ωt ωx 1 (t) 1 = (ωx 10 1)cos ωt + ωx 0 sin ωt, ωx (t) = (ωx 1 (t) 1)sin ωt + ωx 0 cos ωt. Na tej podstawie ustalamy zwi azek miȩdzy zmiennymi x 1 (t) i x (t) podnosz ac do kwadratu ostatnie zależności (ωx 1 1) + (ωx ) = (ωx 10 1) + (ωx 0 ). Stosuj ac analogiczne przekszta lcenia uzyskujemy dla sterowania u = 1 (ωx 1 + 1) + (ωx ) = (ωx 10 1) + (ωx 0 ). Tak wiȩc trajektorie stanu oscylatora idealnego s a, we wspó lrzȩdnych (ωx 1, ωx ), okrȩgami o środku (1, 0) dla sterowania u = +1 i okrȩgami o środku ( 1, 0) dla sterowania u = 1. Promień okrȩgu jest równy ρ = ((ωx10 1) + (ωx 0 ) ). 11
 + (ωx ) = (ωx 10 1) + (ωx 0 ).")
12 ωx ωx 1 ωx ωx 1 1
13 Przyk lad: minimalnoczasowe sprowadzanie oscylatora z t lumieniem w lasnym do po lożenia równowagi. ściana podstawowa amortyzator sprȩżynowy Obiekt sterowania M si la stabilizuj aca t lumik Uk lad o charakterze oscylatora z t lumieniem w lasnym jest opisywany równaniami stanu ẋ 1 (t) = x (t), ẋ (t) = x 1 (t) ξx (t) + u(t), t [0, t 1 ], z warunkami granicznymi x i (0) = x i0, x i (t 1 ), i = 1, i z ograniczeniami chwilowymi sterowania u(t) 1, gdzie ξ (0, 1) jest wspó lczynnikiem t lumienia oscylatora. Dla celów analizy w lasności matematycznych modelu uk ladu dokonujemy symetryzacji równań stanu wprowadzaj ac nowe wspó lrzȩdne stanu za pomoc a przekszta lcenia ( x 1 x ) = ξ 1 ξ ξ 1 ( z 1 z ) czyli ( z 1 z ) = ( ) ( 1 ξ 0 ξ 1 x 1 x ) 13
![x (t), ẋ (t) = x 1 (t) ξx (t) + u(t), t [0, t 1 ], z warunkami granicznymi x i (0) = x i0, x i (t 1 ), i = 1, i z ograniczeniami chwilowymi sterowania u(t) 1, gdzie ξ (0, 1) jest wspó](/docs-images/46/8753376/images/page_13.jpg "lczynnikiem t lumienia oscylatora.")
14 Równania stanu w nowych wspó lrzȩdnych przybior a postać ( ) ( ) ( ) ż 1 (t) 1 ξ = ż (t) ξ 1 1 ξ ξ 1 ξ ξ 1 ( ) ( ) z 1 (t) 0 + u(t) z (t) 1 czyli ( ) ( ) ( ) ( ) ż 1 (t) ξ 1 ξ = ż (t) z 1 (t) 0 + u(t). 1 ξ ξ z (t) 1 Zadanie minimalnoczasowego sterowania dla oscylatora z t lumieniem w lasnym w nowych wspó lrzȩdnych stanu przybierze postać: zminimalizować wskaźnik jakości G(z, u) = t1 uwzglȩdniaj ac ograniczenia w postaci przekszta lconych równań stanu 0 dt ż(t) = Az(t) + Bu(t), t [0, t 1 ], z(0) = z 0, z(t 1 ) = z 1 oraz w postaci maksymalnej dopuszczalnej amplitudy sterowania u(t) 1, t [0, t 1 ], gdzie ( ) ( ) ξ 1 ξ A = 0, B = u(t). 1 ξ ξ 1 Zapisujemy zmodyfikowany funkcjona l Lagrange a G(z, λ, u) = t1 0 oraz równania Eulera-Lagrange a ( 1 + λ T (t)(ż(t) Az(t) Bu(t)) + K(u(t)) ) dt λ(t) = A T λ(t), ż(t) = Az(t) + Bu(t), K u (u(t)) = λ T (t)b, gdzie ( A T ξ = 1 ξ ) 1 ξ ξ 14
 = Az(t) + Bu(t), t [0, t 1 ], z(0) = z 0, z(t 1 ) = z 1 oraz w postaci maksymalnej dopuszczalnej amplitudy sterowania u(t) 1, t [0, t 1")
15 Z równania optymalnego sterowania wynika, że u o (t) = sign(λ (t)). W zwi azku z tym analizujemy rozwi azanie równań sprzȩżonych przyjmuj acych w zapisie skalarnym postać λ 1 (t) = ξλ 1 (t) + 1 ξ λ (t), λ (t) = 1 ξ λ 1 (t) + ξλ (t). Wyznaczamy rozwi azanie uk ladu równań sprzȩżonych jako uk ladu stacjonarnych jednorodnych równań różniczkowych λ 1 (t) = C 1 e ξt sin( 1 ξ t + C, λ (t) = C 1 e ξt cos( 1 ξ t + C. Tak wiȩc sterowanie minimalnoczasowe określone jest przez znak funkcji typu cosαt (modulowanej przez eksponentȩ) u o (t) = sign(c 1 e ξt cos( 1 ξ t + C ). Wynika st ad, że sterowanie minimalnoczasowe dla oscylatora z t lumieniem w lasnym przyjmuje wartości +1 lub -1 i zachowuje sta l awartość nie d lużej niż π 1 ξ jednostek czasu. Aby określić krzyw a prze l aczeń sterowania minimalnoczasowego zapisujemy równania stanu dla u(t) = ±1: i ich rozwi azanie dla u o = +1 ż 1 (t) = ξz 1 (t) + 1 ξ z (t), ż (t) = ξz 1 (t) ξz (t) ± 1. oraz dla u o = 1 z 1 (t) = 1 ξ + C 1 e ξt cos( 1 ξ t + C ), z (t) = ξ C 1 e ξt sin( 1 ξ t + C ) z 1 (t) = 1 ξ + C 1 e ξt cos( 1 ξ t + C ), 15
 u o (t) = sign(c 1 e ξt cos( 1 ξ t + C ).")
16 z (t) = ξ C 1 e ξt sin( 1 ξ t + C ). Wprowadzaj ac wspó lrzȩdna biegunowe uzyskujemy dla u o = +1 ρ(t). = C 1 e ξt, ϕ(t). = 1 ξ t C z 1 (t) 1 ξ = ρ(t)cos ϕ(t), z (t) ξ = ρ(t)sin ϕ(t). Trajektoria stanu opisywana tymi równaniami jest spiral a logarytmiczn a o środku ( 1 ξ, ξ). Natomiast dla u o = 1 uzyskujemy z 1 (t) + 1 ξ = ρ(t)cos ϕ(t), z (t) + ξ = ρ(t)sin ϕ(t). Trajektoria stanu opisywana tymi równaniami jest spiral a logarytmiczn a o środku ( 1 ξ, ξ). Po lowa zwoju każdej ze wskazanych spirali odpowiada π 1 ξ jednostkom czasu. Pierwsze dwa kawa lki krzywej prze l aczeń określone s a spiralami przechodz acymi przez pocz atek uk ladu wspó lrzȩdnych. Kolejne kawa lki krzywej prze l aczeń określane s a przez osi aganie tych pierwszych kawa lków za pomoc a po lowy zwoju spirali jako przebiegu trajektorii stanu uk ladu odpowiadaj acego π 1 ξ jednostkom czasu. Każdemu stanowi pocz atkowemu po lożonemu nad krzyw a prze l aczeń odpowiada sterowanie optymalne u o = 1, a pod krzyw a - sterowanie optymalne u o =

Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym
 Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym Sprowadzanie zadań sterowania optymalnego do zadań wariacyjnych metod a funkcji kary i mnożników Lagrange a - zadania sterowania optymalnego
Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym Sprowadzanie zadań sterowania optymalnego do zadań wariacyjnych metod a funkcji kary i mnożników Lagrange a - zadania sterowania optymalnego
Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym
 Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym Sprowadzanie zadań sterowania optymalnego do zadań wariacyjnych metod a funkcji kary i mnożników Lagrange a - zadania sterowania optymalnego
Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym Sprowadzanie zadań sterowania optymalnego do zadań wariacyjnych metod a funkcji kary i mnożników Lagrange a - zadania sterowania optymalnego
Wprowadzenie do metod sterowania optymalnego
 Wprowadzenie do metod sterowania optymalnego Pojȩcie procesu sterowania obejmuje zestaw trajektorii stanu i sterowania (x, u) X U, gdzie X jest przestrzeni a trajektorii stanu, a U jest przestrzeni a sterowania.
Wprowadzenie do metod sterowania optymalnego Pojȩcie procesu sterowania obejmuje zestaw trajektorii stanu i sterowania (x, u) X U, gdzie X jest przestrzeni a trajektorii stanu, a U jest przestrzeni a sterowania.
Sterowanie optymalne dla uk ladów nieliniowych. Zasada maksimum Pontriagina.
 Sterowanie optymalne dla uk ladów nieliniowych. Zasada maksimum Pontriagina. Podstawowy problem sterowania optymalnego dla uk ladów nieliniowych W podstawowym problemie sterowania optymalnego minimalizacji
Sterowanie optymalne dla uk ladów nieliniowych. Zasada maksimum Pontriagina. Podstawowy problem sterowania optymalnego dla uk ladów nieliniowych W podstawowym problemie sterowania optymalnego minimalizacji
Sterowalność liniowych uk ladów sterowania
 Sterowalność liniowych uk ladów sterowania W zadaniach sterowania docelowego należy przeprowadzić obiekt opisywany za pomoc a równania stanu z zadanego stanu pocz atkowego ẋ(t) = f(x(t), u(t), t), t [t,
Sterowalność liniowych uk ladów sterowania W zadaniach sterowania docelowego należy przeprowadzić obiekt opisywany za pomoc a równania stanu z zadanego stanu pocz atkowego ẋ(t) = f(x(t), u(t), t), t [t,
Liniowe uk lady sterowania.
 Liniowe uk lady sterowania Rozwi azywanie liniowych rownań stanu Uk lady z czasem ci ag lym Liniowe stacjonarne równania stanu Przyk lad: Uk lad sterowania tarcz a obrotow a prȩt sprȩżysty tarcza obrotowa
Liniowe uk lady sterowania Rozwi azywanie liniowych rownań stanu Uk lady z czasem ci ag lym Liniowe stacjonarne równania stanu Przyk lad: Uk lad sterowania tarcz a obrotow a prȩt sprȩżysty tarcza obrotowa
Wprowadzenie do teorii sterowania
 Wprowadzenie do teorii sterowania Literatura podstawowa T. Kaczorek i inni, Podstawy teorii sterowania, WNT, Warszawa 2005. T. Kaczorek, Teoria sterowania i systemów, PWN, Warszawa 1996. T. Kaczorek, Teoria
Wprowadzenie do teorii sterowania Literatura podstawowa T. Kaczorek i inni, Podstawy teorii sterowania, WNT, Warszawa 2005. T. Kaczorek, Teoria sterowania i systemów, PWN, Warszawa 1996. T. Kaczorek, Teoria
Stabilność liniowych uk ladów sterowania
 Stabilność liniowych uk ladów sterowania Stabilność uk ladów z czasem ci ag lym W teorii stabilności uk ladów sterowania badamy wrażliwość trajektorii stanu na zaburzenia stanu pocz atkowego. Interesuje
Stabilność liniowych uk ladów sterowania Stabilność uk ladów z czasem ci ag lym W teorii stabilności uk ladów sterowania badamy wrażliwość trajektorii stanu na zaburzenia stanu pocz atkowego. Interesuje
Zagadnienie Dualne Zadania Programowania Liniowego. Seminarium Szkoleniowe Edyta Mrówka
 Zagadnienie Dualne Zadania Programowania Liniowego Seminarium Szkoleniowe Edyta Mrówka Ogólne zagadnienie PL Znajdź taki wektor X = (x 1, x 2,..., x n ), który minimalizuje kombinacje liniow a przy ograniczeniach
Zagadnienie Dualne Zadania Programowania Liniowego Seminarium Szkoleniowe Edyta Mrówka Ogólne zagadnienie PL Znajdź taki wektor X = (x 1, x 2,..., x n ), który minimalizuje kombinacje liniow a przy ograniczeniach
y 1 y 2 = f 2 (t, y 1, y 2,..., y n )... y n = f n (t, y 1, y 2,..., y n ) f 1 (t, y 1, y 2,..., y n ) y = f(t, y),, f(t, y) =
... y n = f n (t, y 1, y 2,..., y n ) f 1 (t, y 1, y 2,..., y n ) y = f(t, y),, f(t, y) =") Uk lady równań różniczkowych Pojȩcia wsȩpne Uk ladem równań różniczkowych nazywamy uk lad posaci y = f (, y, y 2,, y n ) y 2 = f 2 (, y, y 2,, y n ) y n = f n (, y, y 2,, y n ) () funkcje f j, j =, 2,,
Uk lady równań różniczkowych Pojȩcia wsȩpne Uk ladem równań różniczkowych nazywamy uk lad posaci y = f (, y, y 2,, y n ) y 2 = f 2 (, y, y 2,, y n ) y n = f n (, y, y 2,, y n ) () funkcje f j, j =, 2,,
Synteza optymalnego regulatora stanu. Uk lady z czasem ci ag lym.
 Synteza optymalnego regulatora stanu. Uk lady z czasem ci ag lym. Po wyznaczeniu optymalnego nominalnego) procesu sterowania x o, u o nasuwa siȩ kwestia podtrzymywania tego procesu w warunkach ma lych
Synteza optymalnego regulatora stanu. Uk lady z czasem ci ag lym. Po wyznaczeniu optymalnego nominalnego) procesu sterowania x o, u o nasuwa siȩ kwestia podtrzymywania tego procesu w warunkach ma lych
Metoda Simplex bez użycia tabel simplex 29 kwietnia 2010
 R. Rȩbowski 1 WPROWADZENIE Metoda Simplex bez użycia tabel simplex 29 kwietnia 2010 1 Wprowadzenie Powszechnie uważa siȩ, że metoda simplex, jako uniwersalny algorytm pozwalaj acyznaleźć rozwi azanie optymalne
R. Rȩbowski 1 WPROWADZENIE Metoda Simplex bez użycia tabel simplex 29 kwietnia 2010 1 Wprowadzenie Powszechnie uważa siȩ, że metoda simplex, jako uniwersalny algorytm pozwalaj acyznaleźć rozwi azanie optymalne
POCHODNA KIERUNKOWA. DEFINICJA Jeśli istnieje granica lim. to granica ta nazywa siȩ pochodn a kierunkow a funkcji f(m) w kierunku osi l i oznaczamy
 w kierunku osi l i oznaczamy") POCHODNA KIERUNKOWA Pochodne cz astkowe funkcji f(m) = f(x, y, z) wzglȩdem x, wzglȩdem y i wzglȩdem z wyrażaj a prȩdkość zmiany funkcji w kierunku osi wspó lrzȩdnych; np. f x jest prȩdkości a zmiany funkcji
POCHODNA KIERUNKOWA Pochodne cz astkowe funkcji f(m) = f(x, y, z) wzglȩdem x, wzglȩdem y i wzglȩdem z wyrażaj a prȩdkość zmiany funkcji w kierunku osi wspó lrzȩdnych; np. f x jest prȩdkości a zmiany funkcji
Ekonomia matematyczna i dynamiczna optymalizacja
 Ekonomia matematyczna i dynamiczna optymalizacja Ramy wyk ladu i podstawowe narz edzia matematyczne SGH Semestr letni 2012-13 Uk lady dynamiczne Rozwiazanie modelu dynamicznego bardzo czesto można zapisać
Ekonomia matematyczna i dynamiczna optymalizacja Ramy wyk ladu i podstawowe narz edzia matematyczne SGH Semestr letni 2012-13 Uk lady dynamiczne Rozwiazanie modelu dynamicznego bardzo czesto można zapisać
Sterowanie optymalne
 Sterowanie optymalne Sterowanie Procesami Ciągłymi 2017 Optymalizacja statyczna funkcji Funkcja celu/kryterialna/kosztów Ograniczenie Q(x) min x x = arg min Q(x) x x X, gdzie X zbiór rozwiązań dopuszczalnych
Sterowanie optymalne Sterowanie Procesami Ciągłymi 2017 Optymalizacja statyczna funkcji Funkcja celu/kryterialna/kosztów Ograniczenie Q(x) min x x = arg min Q(x) x x X, gdzie X zbiór rozwiązań dopuszczalnych
liniowych uk ladów sterowania
 Sterowalność i obserwowalność liniowych uk ladów sterowania W zadaniach sterowania docelowego należy przeprowadzić obiekt opisywany za pomoc a równania stanu z zadanego stanu pocz atkowego ẋ(t) = f(x(t),
Sterowalność i obserwowalność liniowych uk ladów sterowania W zadaniach sterowania docelowego należy przeprowadzić obiekt opisywany za pomoc a równania stanu z zadanego stanu pocz atkowego ẋ(t) = f(x(t),
Po wprowadzeniu zmiennych uzupe lniaj acych otrzymamy równoważny mu problem w postaci kanonicznej:
 ROZDZIA L Metoda sympleksowa Motto: Matematyka nie może wype lnić życia ale jej nieznajomość już niejednemu je wype lni la H Steinhaus Tablica sympleksowa Rozważmy ZPL w postaci klasycznej maksymalizować
ROZDZIA L Metoda sympleksowa Motto: Matematyka nie może wype lnić życia ale jej nieznajomość już niejednemu je wype lni la H Steinhaus Tablica sympleksowa Rozważmy ZPL w postaci klasycznej maksymalizować
CHEMIA KWANTOWA MONIKA MUSIA L. Ćwiczenia. mm
 CHEMIA KWANTOWA MONIKA MUSIA L Ćwiczenia METODY PRZYBLIŻONE ROZWIA ZYWANIA RÓWNANIA SCHRÖDINGERA METODA WARIACYJNA metoda wariacyjna ĤΨ n = E n Ψ n Ψ n ortonormalne Szukamy rozwi azań dla stanu podstawowego,
CHEMIA KWANTOWA MONIKA MUSIA L Ćwiczenia METODY PRZYBLIŻONE ROZWIA ZYWANIA RÓWNANIA SCHRÖDINGERA METODA WARIACYJNA metoda wariacyjna ĤΨ n = E n Ψ n Ψ n ortonormalne Szukamy rozwi azań dla stanu podstawowego,
Liczby zespolone, liniowa zależność i bazy Javier de Lucas. a d b c. ad bc
 Liczby zespolone, liniowa zależność i bazy Javier de Lucas Ćwiczenie. Dowieść, że jeśli µ := c d d c, to homografia h(x) = (ax+b)/(cx+d), a, b, c, d C, ad bc, odwzorowuje oś rzeczywist a R C na okr ag
Liczby zespolone, liniowa zależność i bazy Javier de Lucas Ćwiczenie. Dowieść, że jeśli µ := c d d c, to homografia h(x) = (ax+b)/(cx+d), a, b, c, d C, ad bc, odwzorowuje oś rzeczywist a R C na okr ag
Metody kierunków poprawy dla nieliniowych problemów sterowania optymalnego
 Metody kierunków poprawy dla nieliniowych problemów sterowania optymalnego Problem optymalnego sterowania procesem dynamicznym może polegać na polega na minimalizacji wskaźnika jakości obejmuj acego koszty
Metody kierunków poprawy dla nieliniowych problemów sterowania optymalnego Problem optymalnego sterowania procesem dynamicznym może polegać na polega na minimalizacji wskaźnika jakości obejmuj acego koszty
Funkcje wielu zmiennych
 Funkcje wielu zmiennych 8 Pochodna kierunkowa funkcji Definicja Niech funkcja f określona bȩdzie w otoczeniu punktu P 0 = (x 0, y 0 ) oraz niech v = [v x, v y ] bȩdzie wektorem. Pochodn a kierunkow a funkcji
Funkcje wielu zmiennych 8 Pochodna kierunkowa funkcji Definicja Niech funkcja f określona bȩdzie w otoczeniu punktu P 0 = (x 0, y 0 ) oraz niech v = [v x, v y ] bȩdzie wektorem. Pochodn a kierunkow a funkcji
Suma i przeciȩcie podprzestrzeń, suma prosta, przestrzeń ilorazowa Javier de Lucas
 Suma i przeciȩcie podprzestrzeń suma prosta przestrzeń ilorazowa Javier de Lucas Ćwiczenie 1 W zależności od wartości parametru p podaj wymiar przestrzeni W = v 1 v v 3 gdzie p 0 v 1 = 1 + p 3 v = 5 3
Suma i przeciȩcie podprzestrzeń suma prosta przestrzeń ilorazowa Javier de Lucas Ćwiczenie 1 W zależności od wartości parametru p podaj wymiar przestrzeni W = v 1 v v 3 gdzie p 0 v 1 = 1 + p 3 v = 5 3
Równania różniczkowe cz astkowe rzȩdu pierwszego
 Równania różniczkowe cz astkowe rzȩd pierwszego 1 Równania liniowe jednorodne Rozważmy równanie a 1 ( 1,..., n ) 1 +... + a n ( 1,..., n ) n = 0, (1) gdzie a i, i = 1,..., n s a dane, a fnkcja = ( 1,...,
Równania różniczkowe cz astkowe rzȩd pierwszego 1 Równania liniowe jednorodne Rozważmy równanie a 1 ( 1,..., n ) 1 +... + a n ( 1,..., n ) n = 0, (1) gdzie a i, i = 1,..., n s a dane, a fnkcja = ( 1,...,
na p laszczyźnie kartezjaṅskiej prowadzimy prost a o rȯwnaniu s 1. (1.1) s 0 + t 1 t 0
 s 0 + t 1 t 0") Chapter 1 Interpolacja 1.1 Interpolacja liniowa Zacznijmy opis pojȩcia inter-polacji od prostego przyk ladu. Przyk lad 1.1 Oblicz ile kilometrȯw przejecha l samochȯd po 3 godzinach jazdy, jeżeli po jednej
Chapter 1 Interpolacja 1.1 Interpolacja liniowa Zacznijmy opis pojȩcia inter-polacji od prostego przyk ladu. Przyk lad 1.1 Oblicz ile kilometrȯw przejecha l samochȯd po 3 godzinach jazdy, jeżeli po jednej
CHEMIA KWANTOWA MONIKA MUSIA L METODA HÜCKLA. Ćwiczenia. http://zcht.mfc.us.edu.pl/ mm
 CHEMIA KWANTOWA MONIKA MUSIA L METODA HÜCKLA Ćwiczenia Zwi azki organiczne zawieraj ace uk lady π-elektronowe Sprzȩżony uk lad wi azań podwójnych: -C=C-C=C-C=C-C=C- Skumulowany uk lad wi azań podwójnych:
CHEMIA KWANTOWA MONIKA MUSIA L METODA HÜCKLA Ćwiczenia Zwi azki organiczne zawieraj ace uk lady π-elektronowe Sprzȩżony uk lad wi azań podwójnych: -C=C-C=C-C=C-C=C- Skumulowany uk lad wi azań podwójnych:
Wprowadzenie do teorii sterowania. Procesy sterowania o parametrach skupionych.
 Dr hab. inż. Krystyn Styczeń, prof. PWr Wprowadzenie do teorii sterowania. Procesy sterowania o parametrach skupionych. http://staff.iiar.pwr.wroc.pl/krystyn.styczen/ http://krystyn.styczen.staff.iiar.pwr.wroc.pl/
Dr hab. inż. Krystyn Styczeń, prof. PWr Wprowadzenie do teorii sterowania. Procesy sterowania o parametrach skupionych. http://staff.iiar.pwr.wroc.pl/krystyn.styczen/ http://krystyn.styczen.staff.iiar.pwr.wroc.pl/
SZKO LA PODSTAWOWA HELIANTUS WARSZAWA ul. BAŻANCIA 16. Szeṡcian w uk ladzie wspȯ lrzȩdnych x, y, z GEOMETRIA PRZESTRZENNA STEREOMETRIA
 SZKO LA PODSTAWOWA HELIANTUS 02-892 WARSZAWA ul. BAŻANCIA 16 z y 0 x Szeṡcian w uk ladzie wspȯ lrzȩdnych x, y, z GEOMETRIA PRZESTRZENNA STEREOMETRIA Prof. dr. Tadeusz STYŠ Warszawa 2018 1 1 Projekt trzynasty
SZKO LA PODSTAWOWA HELIANTUS 02-892 WARSZAWA ul. BAŻANCIA 16 z y 0 x Szeṡcian w uk ladzie wspȯ lrzȩdnych x, y, z GEOMETRIA PRZESTRZENNA STEREOMETRIA Prof. dr. Tadeusz STYŠ Warszawa 2018 1 1 Projekt trzynasty
Opis systemów dynamicznych w przestrzeni stanu. Wojciech Kurek , Gdańsk
 Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Wprowadzenie do teorii sterowania. Procesy o parametrach skupionych
 Politechnika Wroc lawska Wydzia l Elektroniki Katedra K8 Prof. dr hab. inż. Krystyn Styczeń http://staff.iiar.pwr.wroc.pl/krystyn.styczen/ Wprowadzenie do teorii sterowania. Procesy o parametrach skupionych
Politechnika Wroc lawska Wydzia l Elektroniki Katedra K8 Prof. dr hab. inż. Krystyn Styczeń http://staff.iiar.pwr.wroc.pl/krystyn.styczen/ Wprowadzenie do teorii sterowania. Procesy o parametrach skupionych
Wyk lad 9 Przekszta lcenia liniowe i ich zastosowania
 Wyk lad 9 Przekszta lcenia liniowe i ich zastosowania 1 Przekszta lcenia liniowe i ich w lasności Definicja 9.1. Niech V i W bed przestrzeniami liniowymi. Przekszta lcenie f : V W spe lniajace warunki:
Wyk lad 9 Przekszta lcenia liniowe i ich zastosowania 1 Przekszta lcenia liniowe i ich w lasności Definicja 9.1. Niech V i W bed przestrzeniami liniowymi. Przekszta lcenie f : V W spe lniajace warunki:
STATYSTYKA MATEMATYCZNA dla ZPM I dr inż Krzysztof Bryś wyk lad 1,2 KLASYCZNY RACHUNEK PRAWDOPODOBIEŃSTWA
 1 STATYSTYKA MATEMATYCZNA dla ZPM I dr inż Krzysztof Bryś wyk lad 1,2 KLASYCZNY RACHUNEK PRAWDOPODOBIEŃSTWA 1. Pojȩcia wstȩpne. Doświadczeniem losowym nazywamy doświadczenie, którego wynik nie jest znany.
1 STATYSTYKA MATEMATYCZNA dla ZPM I dr inż Krzysztof Bryś wyk lad 1,2 KLASYCZNY RACHUNEK PRAWDOPODOBIEŃSTWA 1. Pojȩcia wstȩpne. Doświadczeniem losowym nazywamy doświadczenie, którego wynik nie jest znany.
Dyskretne modele populacji
 Dyskretne modele populacji Micha l Machtel Adam Soboczyński 17 stycznia 2007 Typeset by FoilTEX Dyskretne modele populacji [1] Wst ep Dyskretny opis modelu matematycznego jest dobry dla populacji w których
Dyskretne modele populacji Micha l Machtel Adam Soboczyński 17 stycznia 2007 Typeset by FoilTEX Dyskretne modele populacji [1] Wst ep Dyskretny opis modelu matematycznego jest dobry dla populacji w których
ZAGADNIENIE DUALNE Rozważmy zagadnienie liniowe(zagadnienie to nazywamy prymalnym) o postaci kanonicznej:
 o postaci kanonicznej:") A Kasperski, M Kulej Badania Operacyjne- programowanie liniowe 1 ZAGADNIENIE DUALNE Rozważmy zagadnienie liniowe(zagadnienie to nazywamy prymalnym) o postaci kanonicznej: max z = c 1 x 1 + c 2 x 2 + +
A Kasperski, M Kulej Badania Operacyjne- programowanie liniowe 1 ZAGADNIENIE DUALNE Rozważmy zagadnienie liniowe(zagadnienie to nazywamy prymalnym) o postaci kanonicznej: max z = c 1 x 1 + c 2 x 2 + +
Wprowadzenie z dynamicznej optymalizacji
 Wprowadzenie z dynamicznej optymalizacji Lukasz Woźny 29 kwietnia 2007 Spis treści 1 Optymalizacja statyczna a optymalizacja dynamiczna 2 1.1 Ekstrema lokalne funkcji wielu zmiennych - statyka...... 2
Wprowadzenie z dynamicznej optymalizacji Lukasz Woźny 29 kwietnia 2007 Spis treści 1 Optymalizacja statyczna a optymalizacja dynamiczna 2 1.1 Ekstrema lokalne funkcji wielu zmiennych - statyka...... 2
Rozdzia l 11. Przestrzenie Euklidesowe Definicja, iloczyn skalarny i norma. iloczynem skalarnym.
 Rozdzia l 11 Przestrzenie Euklidesowe 11.1 Definicja, iloczyn skalarny i norma Definicja 11.1 Przestrzenia Euklidesowa nazywamy par e { X K,ϕ }, gdzie X K jest przestrzenia liniowa nad K, a ϕ forma dwuliniowa
Rozdzia l 11 Przestrzenie Euklidesowe 11.1 Definicja, iloczyn skalarny i norma Definicja 11.1 Przestrzenia Euklidesowa nazywamy par e { X K,ϕ }, gdzie X K jest przestrzenia liniowa nad K, a ϕ forma dwuliniowa
Metody Numeryczne Wykład 4 Wykład 5. Interpolacja wielomianowa
 Sformułowanie zadania interpolacji Metody Numeryczne Wykład 4 Wykład 5 Interpolacja wielomianowa Niech D R i niech F bȩdzie pewnym zbiorem funkcji f : D R. Niech x 0, x 1,..., x n bȩdzie ustalonym zbiorem
Sformułowanie zadania interpolacji Metody Numeryczne Wykład 4 Wykład 5 Interpolacja wielomianowa Niech D R i niech F bȩdzie pewnym zbiorem funkcji f : D R. Niech x 0, x 1,..., x n bȩdzie ustalonym zbiorem
Wyk lad 14 Formy kwadratowe I
 Wyk lad 14 Formy kwadratowe I Wielomian n-zmiennych x 1,, x n postaci n a ij x i x j, (1) gdzie a ij R oraz a ij = a ji dla wszystkich i, j = 1,, n nazywamy forma kwadratowa n-zmiennych Forme (1) można
Wyk lad 14 Formy kwadratowe I Wielomian n-zmiennych x 1,, x n postaci n a ij x i x j, (1) gdzie a ij R oraz a ij = a ji dla wszystkich i, j = 1,, n nazywamy forma kwadratowa n-zmiennych Forme (1) można
ANALIZA II 15 marca 2014 Semestr letni. Ćwiczenie 1. Czy dan a funkcjȩ da siȩ dookreślić w punkcie (0, 0) tak, żeby otrzymana funkcja by la ci ag la?
 tak, żeby otrzymana funkcja by la ci ag la?") Ci ag lość i norma Ćwiczenie. Czy dan a funkcjȩ da siȩ dookreślić w punkcie (0, 0) tak, żeby otrzymana funkcja by la ci ag la? f (x, y) = x2 y 2 x 2 + y 2, f 2(x, y) = x2 y x 2 + y 2 f 3 (x, y) = x2 y
Ci ag lość i norma Ćwiczenie. Czy dan a funkcjȩ da siȩ dookreślić w punkcie (0, 0) tak, żeby otrzymana funkcja by la ci ag la? f (x, y) = x2 y 2 x 2 + y 2, f 2(x, y) = x2 y x 2 + y 2 f 3 (x, y) = x2 y
Geometria odwzorowań inżynierskich. 1. Perspektywa odbić w zwierciad lach p laskich 06F
 Scriptiones Geometrica Volumen I (2014), No. 6F, 1 10. Geometria odwzorowań inżynierskich Perspektywa odbić w zwierciad lach p laskich 06F Edwin Koźniewski Zak lad Informacji Przestrzennej 1. Perspektywa
Scriptiones Geometrica Volumen I (2014), No. 6F, 1 10. Geometria odwzorowań inżynierskich Perspektywa odbić w zwierciad lach p laskich 06F Edwin Koźniewski Zak lad Informacji Przestrzennej 1. Perspektywa
Pierwsze kolokwium z Matematyki I 4. listopada 2013 r. J. de Lucas
 Pierwsze kolokwium z Matematyki I 4. listopada 03 r. J. de Lucas Uwagi organizacyjne: Każde zadanie rozwi azujemy na osobnej kartce, opatrzonej imieniem i nazwiskiem w lasnym oraz osoby prowadz acej ćwiczenia,
Pierwsze kolokwium z Matematyki I 4. listopada 03 r. J. de Lucas Uwagi organizacyjne: Każde zadanie rozwi azujemy na osobnej kartce, opatrzonej imieniem i nazwiskiem w lasnym oraz osoby prowadz acej ćwiczenia,
Wyk lad 11 1 Wektory i wartości w lasne
 Wyk lad 11 Wektory i wartości w lasne 1 Wektory i wartości w lasne Niech V bedzie przestrzenia liniowa nad cia lem K Każde przekszta lcenie liniowe f : V V nazywamy endomorfizmem liniowym przestrzeni V
Wyk lad 11 Wektory i wartości w lasne 1 Wektory i wartości w lasne Niech V bedzie przestrzenia liniowa nad cia lem K Każde przekszta lcenie liniowe f : V V nazywamy endomorfizmem liniowym przestrzeni V
STYSTYSTYKA dla ZOM II dr inż Krzysztof Bryś Wykad 1
 1 STYSTYSTYKA dla ZOM II dr inż Krzysztof Bryś Wykad 1 Klasyczny Rachunek Prawdopodobieństwa. 1. Pojȩcia wstȩpne. Doświadczeniem losowym nazywamy doświadczenie, którego wynik nie jest znany. Posiadamy
1 STYSTYSTYKA dla ZOM II dr inż Krzysztof Bryś Wykad 1 Klasyczny Rachunek Prawdopodobieństwa. 1. Pojȩcia wstȩpne. Doświadczeniem losowym nazywamy doświadczenie, którego wynik nie jest znany. Posiadamy
w = w i ξ i. (1) i=1 w 1 w 2 :
 i=1 w 1 w 2 :") S. D. G lazek, www.fuw.edu.pl/ stglazek, 11.III.2005 1 I. MACIERZ LINIOWEGO ODWZOROWANIA PRZESTRZENI WEKTOROWYCH Wyobraźmy sobie, że przestrzeń wektorowa W jest zbudowana z kombinacji liniowych n liniowo
S. D. G lazek, www.fuw.edu.pl/ stglazek, 11.III.2005 1 I. MACIERZ LINIOWEGO ODWZOROWANIA PRZESTRZENI WEKTOROWYCH Wyobraźmy sobie, że przestrzeń wektorowa W jest zbudowana z kombinacji liniowych n liniowo
przy warunkach początkowych: 0 = 0, 0 = 0
 MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
Asymptota pozioma: oṡ x, gdy y = 0 Asymptota pionowa: oṡ y, gdy x = 0. Hyperbola 1 x
 1 SZKO LA PODSTAWOWA HELIANTUS 02-892 WARSZAWA ul. BAŻANCIA 16 Asymptota pozioma: oṡ x, gdy y = 0 Asymptota pionowa: oṡ y, gdy x = 0 2 1 0 3 1 2 x Hyperbola 1 x FUNKCJE ELEMENTARNE WYMIERNE POTȨGOWE LOGARYTMICZNE
1 SZKO LA PODSTAWOWA HELIANTUS 02-892 WARSZAWA ul. BAŻANCIA 16 Asymptota pozioma: oṡ x, gdy y = 0 Asymptota pionowa: oṡ y, gdy x = 0 2 1 0 3 1 2 x Hyperbola 1 x FUNKCJE ELEMENTARNE WYMIERNE POTȨGOWE LOGARYTMICZNE
Pierwiastki arytmetyczne n a
 Chapter 1 Pierwiastki arytmetyczne n a Operacja wyci aganie pierwiastka stopnia n z liczby a jest odwrotn a operacj a do potȩgowania, jeżeli operacja odwrotna jest wykonalna w liczbach rzeczywistych. Zacznijmy
Chapter 1 Pierwiastki arytmetyczne n a Operacja wyci aganie pierwiastka stopnia n z liczby a jest odwrotn a operacj a do potȩgowania, jeżeli operacja odwrotna jest wykonalna w liczbach rzeczywistych. Zacznijmy
Projektowanie uk ladów sterowania z wykorzystaniem ich postaci kanonicznych
 Projektowanie uk ladów sterowania z wykorzystaniem ich postaci kanonicznych Niech bȩdzie dany uk lad sterowania taki, że nie wszystkie jego zmienne stanu s a bezpośrednio dostȩpne (mierzalne. Uk lad pozwalaj
Projektowanie uk ladów sterowania z wykorzystaniem ich postaci kanonicznych Niech bȩdzie dany uk lad sterowania taki, że nie wszystkie jego zmienne stanu s a bezpośrednio dostȩpne (mierzalne. Uk lad pozwalaj
Monika Musia l. METODA MIESZANIA KONFIGURACJI Configuration Interaction (CI) (ujȩcie wyznacznikowe)
 (ujȩcie wyznacznikowe)") Monika Musia l METODA MIESZANIA KONFIGURACJI Configuration Interaction (CI) (ujȩcie wyznacznikowe) ĤΨ i = E i Ψ i W metodzie mieszania konfiguracji wariacyjna funkcja falowa, jest liniow a kombinacj a
Monika Musia l METODA MIESZANIA KONFIGURACJI Configuration Interaction (CI) (ujȩcie wyznacznikowe) ĤΨ i = E i Ψ i W metodzie mieszania konfiguracji wariacyjna funkcja falowa, jest liniow a kombinacj a
Zestaw nr 7 Ekstremum funkcji jednej zmiennej. Punkty przegiȩcia wykresu. Asymptoty
 Zestaw nr 7 Ekstremum funkcji jednej zmiennej. Punkty przegiȩcia wykresu. Asymptoty November 20, 2009 Przyk ladowe zadania z rozwi azaniami Zadanie 1. Znajdź równanie asymptot funkcji f jeśli: a) f(x)
Zestaw nr 7 Ekstremum funkcji jednej zmiennej. Punkty przegiȩcia wykresu. Asymptoty November 20, 2009 Przyk ladowe zadania z rozwi azaniami Zadanie 1. Znajdź równanie asymptot funkcji f jeśli: a) f(x)
Zestaw nr 6 Pochodna funkcji jednej zmiennej. Styczna do krzywej. Elastyczność funkcji. Regu la de l Hospitala
 Zestaw nr 6 Pochodna funkcji jednej zmiennej. Styczna do krzywej. Elastyczność funkcji. Regu la de l Hospitala November 12, 2009 Przyk ladowe zadania z rozwi azaniami Zadanie 1. Oblicz pochodne nastȩpuj
Zestaw nr 6 Pochodna funkcji jednej zmiennej. Styczna do krzywej. Elastyczność funkcji. Regu la de l Hospitala November 12, 2009 Przyk ladowe zadania z rozwi azaniami Zadanie 1. Oblicz pochodne nastȩpuj
SZKO LA PODSTAWOWA HELIANTUS WARSZAWA ul. BAŻANCIA 16. Hyperbola 1 x FUNKCJE ELEMENTARNE WYMIERNE POTȨGOWE LOGARYTMICZNE.
 1 SZKO LA PODSTAWOWA HELIANTUS 0-89 WARSZAWA ul. BAŻANCIA 16 1 0 3 1 x Hyperbola 1 x FUNKCJE ELEMENTARNE WYMIERNE POTȨGOWE LOGARYTMICZNE Prof. dr. Tadeusz STYŠ Warszawa 018 1 1 Projekt dziesi aty Contents
1 SZKO LA PODSTAWOWA HELIANTUS 0-89 WARSZAWA ul. BAŻANCIA 16 1 0 3 1 x Hyperbola 1 x FUNKCJE ELEMENTARNE WYMIERNE POTȨGOWE LOGARYTMICZNE Prof. dr. Tadeusz STYŠ Warszawa 018 1 1 Projekt dziesi aty Contents
Dyskretne modele populacji
 Dyskretne modele populacji Micha l Machtel Adam Soboczyński 19 stycznia 2007 Typeset by FoilTEX Dyskretne modele populacji [1] Wst ep Dyskretny opis modelu matematycznego jest dobry dla populacji w których
Dyskretne modele populacji Micha l Machtel Adam Soboczyński 19 stycznia 2007 Typeset by FoilTEX Dyskretne modele populacji [1] Wst ep Dyskretny opis modelu matematycznego jest dobry dla populacji w których
Zasada optymalności Bellmana. Uogólniony optymalny regulator stanu.
 Zasada optymalności Bellmana. Uogólniony optymalny regulator stanu. Podstawowy problem sterowania optymalnego dla uk ladów nieliniowych z czasem ci ag lym W podstawowym problemie sterowania optymalnego
Zasada optymalności Bellmana. Uogólniony optymalny regulator stanu. Podstawowy problem sterowania optymalnego dla uk ladów nieliniowych z czasem ci ag lym W podstawowym problemie sterowania optymalnego
WYK LAD 5: GEOMETRIA ANALITYCZNA W R 3, PROSTA I P LASZCZYZNA W PRZESTRZENI R 3
 WYK LAD 5: GEOMETRIA ANALITYCZNA W R 3, PROSTA I P LASZCZYZNA W PRZESTRZENI R 3 Definicja 1 Przestrzenia R 3 nazywamy zbiór uporzadkowanych trójek (x, y, z), czyli R 3 = {(x, y, z) : x, y, z R} Przestrzeń
WYK LAD 5: GEOMETRIA ANALITYCZNA W R 3, PROSTA I P LASZCZYZNA W PRZESTRZENI R 3 Definicja 1 Przestrzenia R 3 nazywamy zbiór uporzadkowanych trójek (x, y, z), czyli R 3 = {(x, y, z) : x, y, z R} Przestrzeń
LOGIKA ALGORYTMICZNA
 LOGIKA ALGORYTMICZNA 0.0. Relacje. Iloczyn kartezjański: A B := (a, b) : a A i b B} (zak ladamy, że (x, y) i (u, v) s a równe wtedy i tylko wtedy gdy x = u i y = v); A n := (x 1,..., x n ) : x i A}; R
LOGIKA ALGORYTMICZNA 0.0. Relacje. Iloczyn kartezjański: A B := (a, b) : a A i b B} (zak ladamy, że (x, y) i (u, v) s a równe wtedy i tylko wtedy gdy x = u i y = v); A n := (x 1,..., x n ) : x i A}; R
Zadania o liczbach zespolonych
 Zadania o liczbach zespolonych Zadanie 1. Znaleźć takie liczby rzeczywiste a i b, aby zachodzi ly równości: a) a( + i) + b(4 i) 6 i, b) a( + i) + b( + i) 8i, c) a(4 i) + b(1 + i) 7 1i, ( ) a d) i + b +i
Zadania o liczbach zespolonych Zadanie 1. Znaleźć takie liczby rzeczywiste a i b, aby zachodzi ly równości: a) a( + i) + b(4 i) 6 i, b) a( + i) + b( + i) 8i, c) a(4 i) + b(1 + i) 7 1i, ( ) a d) i + b +i
Elementy analizy funkcjonalnej PRZESTRZENIE LINIOWE
 Elementy analizy funkcjonalnej PRZESTRZENIE LINIOWE Niech K = R lub K = C oraz X - dowolny zbiór. Określmy dwa dzia lania: dodawanie + : X X X i mnożenie przez liczbȩ : K X X, spe lniaj ace nastȩpuj ace
Elementy analizy funkcjonalnej PRZESTRZENIE LINIOWE Niech K = R lub K = C oraz X - dowolny zbiór. Określmy dwa dzia lania: dodawanie + : X X X i mnożenie przez liczbȩ : K X X, spe lniaj ace nastȩpuj ace
Wykład z modelowania matematycznego.
 Załóżmy, że równanie różniczkowe x (t) = f (t, x) (1) ma rozwiązanie ogólne x(t) = ϕ(t, c). (2) Załóżmy, że równanie różniczkowe x (t) = f (t, x) (1) ma rozwiązanie ogólne x(t) = ϕ(t, c). (2) Rodzina funkcji
Załóżmy, że równanie różniczkowe x (t) = f (t, x) (1) ma rozwiązanie ogólne x(t) = ϕ(t, c). (2) Załóżmy, że równanie różniczkowe x (t) = f (t, x) (1) ma rozwiązanie ogólne x(t) = ϕ(t, c). (2) Rodzina funkcji
III. Układy liniowe równań różniczkowych. 1. Pojęcie stabilności rozwiązań.
 III. Układy liniowe równań różniczkowych. 1. Pojęcie stabilności rozwiązań. Analiza stabilności rozwiązań stanowi ważną część jakościowej teorii równań różniczkowych. Jej istotą jest poszukiwanie odpowiedzi
III. Układy liniowe równań różniczkowych. 1. Pojęcie stabilności rozwiązań. Analiza stabilności rozwiązań stanowi ważną część jakościowej teorii równań różniczkowych. Jej istotą jest poszukiwanie odpowiedzi
Suma i przeciȩcie podprzestrzeni, przestrzeń ilorazowa Javier de Lucas
 Suma i przeciȩcie podprzestrzeni, przestrzeń ilorazowa Javier de Lucas Ćwiczenie 1. Dowieść, że jeśli U i V s a podprzestrzeniami n-wymiarowej przestrzeni wektorowej oraz dim U = r i dim V = s, to max(0,
Suma i przeciȩcie podprzestrzeni, przestrzeń ilorazowa Javier de Lucas Ćwiczenie 1. Dowieść, że jeśli U i V s a podprzestrzeniami n-wymiarowej przestrzeni wektorowej oraz dim U = r i dim V = s, to max(0,
1. Podstawowe pojęcia
 1. Podstawowe pojęcia Sterowanie optymalne obiektu polega na znajdowaniu najkorzystniejszej decyzji dotyczącej zamierzonego wpływu na obiekt przy zadanych ograniczeniach. Niech dany jest obiekt opisany
1. Podstawowe pojęcia Sterowanie optymalne obiektu polega na znajdowaniu najkorzystniejszej decyzji dotyczącej zamierzonego wpływu na obiekt przy zadanych ograniczeniach. Niech dany jest obiekt opisany
Zadania do wykładu Jakościowa Teoria Równań Różniczkowych Zwyczajnych
 Zadania do wykładu Jakościowa Teoria Równań Różniczkowych Zwyczajnych [ ] e Zadanie 1 Pokazać, że X(t) = 2t cos t sin t e 2t jest specjalną macierzą fundamentalną w sin t cos t [ 2 cos chwili τ = 0 układu
Zadania do wykładu Jakościowa Teoria Równań Różniczkowych Zwyczajnych [ ] e Zadanie 1 Pokazać, że X(t) = 2t cos t sin t e 2t jest specjalną macierzą fundamentalną w sin t cos t [ 2 cos chwili τ = 0 układu
Wyk lad 8 macierzy i twierdzenie Kroneckera-Capellego
 Wyk lad 8 Rzad macierzy i twierdzenie Kroneckera-Capellego 1 Określenie rz edu macierzy Niech A bedzie m n - macierza Wówczas wiersze macierzy A możemy w naturalny sposób traktować jako wektory przestrzeni
Wyk lad 8 Rzad macierzy i twierdzenie Kroneckera-Capellego 1 Określenie rz edu macierzy Niech A bedzie m n - macierza Wówczas wiersze macierzy A możemy w naturalny sposób traktować jako wektory przestrzeni
Równania różniczkowe liniowe wyższych rzędów o stałych współcz
 Równania różniczkowe liniowe wyższych rzędów o stałych współczynnikach Katedra Matematyki i Ekonomii Matematycznej SGH 12 maja 2016 Równanie liniowe n-tego rzędu Definicja Równaniem różniczkowym liniowym
Równania różniczkowe liniowe wyższych rzędów o stałych współczynnikach Katedra Matematyki i Ekonomii Matematycznej SGH 12 maja 2016 Równanie liniowe n-tego rzędu Definicja Równaniem różniczkowym liniowym
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
FUNKCJA KWADRATOWA. 1. Definicje i przydatne wzory. lub trójmianem kwadratowym nazywamy funkcję postaci: f(x) = ax 2 + bx + c
 = ax 2 + bx + c") FUNKCJA KWADRATOWA 1. Definicje i przydatne wzory DEFINICJA 1. Funkcja kwadratowa lub trójmianem kwadratowym nazywamy funkcję postaci: f(x) = ax + bx + c taką, że a, b, c R oraz a 0. Powyższe wyrażenie
FUNKCJA KWADRATOWA 1. Definicje i przydatne wzory DEFINICJA 1. Funkcja kwadratowa lub trójmianem kwadratowym nazywamy funkcję postaci: f(x) = ax + bx + c taką, że a, b, c R oraz a 0. Powyższe wyrażenie
Wyk lad 7 Metoda eliminacji Gaussa. Wzory Cramera
 Wyk lad 7 Metoda eliminacji Gaussa Wzory Cramera Metoda eliminacji Gaussa Metoda eliminacji Gaussa polega na znalezieniu dla danego uk ladu a x + a 2 x 2 + + a n x n = b a 2 x + a 22 x 2 + + a 2n x n =
Wyk lad 7 Metoda eliminacji Gaussa Wzory Cramera Metoda eliminacji Gaussa Metoda eliminacji Gaussa polega na znalezieniu dla danego uk ladu a x + a 2 x 2 + + a n x n = b a 2 x + a 22 x 2 + + a 2n x n =
Podstawy Automatyki. Wykład 2 - matematyczne modelowanie układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - matematyczne modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - matematyczne modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Niezb. ednik matematyczny. Niezb. ednik matematyczny
 Niezb ednik matematyczny Niezb ednik matematyczny Liczby zespolone I Rozważmy zbiór R R (zbiór par liczb rzeczywistych) i wprowadźmy w nim nastepuj ace dzia lania: z 1 + z 2 = (x 1, y 1 ) + (x 2, y 2 )
Niezb ednik matematyczny Niezb ednik matematyczny Liczby zespolone I Rozważmy zbiór R R (zbiór par liczb rzeczywistych) i wprowadźmy w nim nastepuj ace dzia lania: z 1 + z 2 = (x 1, y 1 ) + (x 2, y 2 )
P (x, y) + Q(x, y)y = 0. g lym w obszrze G R n+1. Funkcje. zania uk ladu (1) o wykresie przebiegaja
 + Q(x, y)y = 0. g lym w obszrze G R n+1. Funkcje. zania uk ladu (1) o wykresie przebiegaja") 19. O ca lkach pierwszych W paragrafie 6 przy badaniu rozwia zań równania P (x, y) + Q(x, y)y = 0 wprowadzono poje cie ca lki równania, podano pewne kryteria na wyznaczanie ca lek równania. Znajomość ca
19. O ca lkach pierwszych W paragrafie 6 przy badaniu rozwia zań równania P (x, y) + Q(x, y)y = 0 wprowadzono poje cie ca lki równania, podano pewne kryteria na wyznaczanie ca lek równania. Znajomość ca
II. Równania autonomiczne. 1. Podstawowe pojęcia.
 II. Równania autonomiczne. 1. Podstawowe pojęcia. Definicja 1.1. Niech Q R n, n 1, będzie danym zbiorem i niech f : Q R n będzie daną funkcją określoną na Q. Równanie różniczkowe postaci (1.1) x = f(x),
II. Równania autonomiczne. 1. Podstawowe pojęcia. Definicja 1.1. Niech Q R n, n 1, będzie danym zbiorem i niech f : Q R n będzie daną funkcją określoną na Q. Równanie różniczkowe postaci (1.1) x = f(x),
Podstawy Automatyki. Wykład 2 - modelowanie matematyczne układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Inżynieria Systemów Dynamicznych (4)
") Inżynieria Systemów Dynamicznych (4) liniowych (układów) Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 2 WE OKREŚLO 3 ASYMPTO 4 DYNAMICZ
Inżynieria Systemów Dynamicznych (4) liniowych (układów) Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 2 WE OKREŚLO 3 ASYMPTO 4 DYNAMICZ
Wyk lad 7 Baza i wymiar przestrzeni liniowej
 Wyk lad 7 Baza i wymiar przestrzeni liniowej 1 Baza przestrzeni liniowej Niech V bedzie przestrzenia liniowa. Powiemy, że podzbiór X V jest maksymalnym zbiorem liniowo niezależnym, jeśli X jest zbiorem
Wyk lad 7 Baza i wymiar przestrzeni liniowej 1 Baza przestrzeni liniowej Niech V bedzie przestrzenia liniowa. Powiemy, że podzbiór X V jest maksymalnym zbiorem liniowo niezależnym, jeśli X jest zbiorem
VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa.
 VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa. W rozdziale tym zajmiemy się dokładniej badaniem stabilności rozwiązań równania różniczkowego. Pojęcie stabilności w
VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa. W rozdziale tym zajmiemy się dokładniej badaniem stabilności rozwiązań równania różniczkowego. Pojęcie stabilności w
Niesimpleksowe metody rozwia zywania zadań PL. Seminarium Szkoleniowe Edyta Mrówka
 Niesimpleksowe metody rozwia zywania zadań PL Seminarium Szkoleniowe Metoda Simplex: wady i zalety Algorytm SIMPLEX jest szeroko znany i stosowany do rozwi azywania zadań programowania liniowego w praktyce.
Niesimpleksowe metody rozwia zywania zadań PL Seminarium Szkoleniowe Metoda Simplex: wady i zalety Algorytm SIMPLEX jest szeroko znany i stosowany do rozwi azywania zadań programowania liniowego w praktyce.
celu przyjmijmy: min x 0 = n t Zadanie transportowe nazywamy zbilansowanym gdy podaż = popyt, czyli n
 123456789 wyk lad 9 Zagadnienie transportowe Mamy n punktów wysy lajacych towar i t punktów odbierajacych. Istnieje droga od każdego dostawcy do każdego odbiorcy i znany jest koszt transportu jednostki
123456789 wyk lad 9 Zagadnienie transportowe Mamy n punktów wysy lajacych towar i t punktów odbierajacych. Istnieje droga od każdego dostawcy do każdego odbiorcy i znany jest koszt transportu jednostki
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Matematyka A, klasówka, 24 maja zania zadań z kolokwium z matematyki A w nadziei, że pope lni lem wielu b le. rozwia
 Matematyka A, klasówka, 4 maja 5 Na prośbe jednej ze studentek podaje zania zadań z kolokwium z matematyki A w nadziei, że pope lni lem wielu b le dów Podać definicje wektora w lasnego i wartości w lasnej
Matematyka A, klasówka, 4 maja 5 Na prośbe jednej ze studentek podaje zania zadań z kolokwium z matematyki A w nadziei, że pope lni lem wielu b le dów Podać definicje wektora w lasnego i wartości w lasnej
MATEMATYKA REPREZENTACJA LICZB W KOMPUTERZE
 1 SZKO LA PODSTAWOWA HELIANTUS 02-892 WARSZAWA ul. BAŻANCIA 16 B l ad bezwzglȩdny zaokr aglenia liczby ɛ = fl() B l ad wzglȩdny zaokr aglenia liczby 0 δ = fl() B l ad procentowy zaokr aglenia liczby 0
1 SZKO LA PODSTAWOWA HELIANTUS 02-892 WARSZAWA ul. BAŻANCIA 16 B l ad bezwzglȩdny zaokr aglenia liczby ɛ = fl() B l ad wzglȩdny zaokr aglenia liczby 0 δ = fl() B l ad procentowy zaokr aglenia liczby 0
Wykład 14. Elementy algebry macierzy
 Wykład 14 Elementy algebry macierzy dr Mariusz Grządziel 26 stycznia 2009 Układ równań z dwoma niewiadomymi Rozważmy układ równań z dwoma niewiadomymi: a 11 x + a 12 y = h 1 a 21 x + a 22 y = h 2 a 11,
Wykład 14 Elementy algebry macierzy dr Mariusz Grządziel 26 stycznia 2009 Układ równań z dwoma niewiadomymi Rozważmy układ równań z dwoma niewiadomymi: a 11 x + a 12 y = h 1 a 21 x + a 22 y = h 2 a 11,
Podstawy Automatyki. Wykład 2 - modelowanie matematyczne układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
stosunek przyrostu funkcji y do odpowiadajacego dy dx = lim y wielkości fizycznej x, y = f(x), to pochodna dy v = ds edkości wzgl edem czasu, a = dv
, to pochodna dy v = ds edkości wzgl edem czasu, a = dv") Matematyka Pochodna Pochodna funkcji y = f(x) w punkcie x nazywamy granice, do której daży stosunek przyrostu funkcji y do odpowiadajacego mu przyrostu zmiennej niezaleźnej x, g przyrost zmiennej daży
Matematyka Pochodna Pochodna funkcji y = f(x) w punkcie x nazywamy granice, do której daży stosunek przyrostu funkcji y do odpowiadajacego mu przyrostu zmiennej niezaleźnej x, g przyrost zmiennej daży
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Wyk lad 5 W lasności wyznaczników. Macierz odwrotna
 Wyk lad 5 W lasności wyznaczników Macierz odwrotna 1 Operacje elementarne na macierzach Bardzo ważne znaczenie w algebrze liniowej odgrywaja tzw operacje elementarne na wierszach lub kolumnach macierzy
Wyk lad 5 W lasności wyznaczników Macierz odwrotna 1 Operacje elementarne na macierzach Bardzo ważne znaczenie w algebrze liniowej odgrywaja tzw operacje elementarne na wierszach lub kolumnach macierzy
Indeks odwzorowania zmiennej zespolonej wzgl. krzywej zamknietej
 Indeks odwzorowania zmiennej zespolonej wzgl edem krzywej zamkni etej 1. Liczby zespolone - konstrukcja Hamiltona 2. Homotopia odwzorowań na okr egu 3. Indeks odwzorowania ciag lego wzgledem krzywej zamknietej
Indeks odwzorowania zmiennej zespolonej wzgl edem krzywej zamkni etej 1. Liczby zespolone - konstrukcja Hamiltona 2. Homotopia odwzorowań na okr egu 3. Indeks odwzorowania ciag lego wzgledem krzywej zamknietej
Stabilność II Metody Lapunowa badania stabilności
 Metody Lapunowa badania stabilności Interesuje nas w sposób szczególny system: Wprowadzamy dla niego pojęcia: - stabilności wewnętrznej - odnosi się do zachowania się systemu przy zerowym wejściu, czyli
Metody Lapunowa badania stabilności Interesuje nas w sposób szczególny system: Wprowadzamy dla niego pojęcia: - stabilności wewnętrznej - odnosi się do zachowania się systemu przy zerowym wejściu, czyli
Rozdzia l 3. Relacje binarne
 Rozdzia l 3. Relacje binarne 1. Para uporz adkowana. Produkt kartezjański dwóch zbiorów Dla pary zbiorów {x, y} zachodzi, jak latwo sprawdzić, równość {x, y} = {y, x}. To znaczy, kolejność wymienienia
Rozdzia l 3. Relacje binarne 1. Para uporz adkowana. Produkt kartezjański dwóch zbiorów Dla pary zbiorów {x, y} zachodzi, jak latwo sprawdzić, równość {x, y} = {y, x}. To znaczy, kolejność wymienienia
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Rys Mo liwe postacie funkcji w metodzie regula falsi
 5.3. Regula falsi i metoda siecznych 73 Rys. 5.1. Mo liwe postacie funkcji w metodzie regula falsi Rys. 5.2. Przypadek f (x), f (x) > w metodzie regula falsi 74 V. Równania nieliniowe i uk³ady równañ liniowych
5.3. Regula falsi i metoda siecznych 73 Rys. 5.1. Mo liwe postacie funkcji w metodzie regula falsi Rys. 5.2. Przypadek f (x), f (x) > w metodzie regula falsi 74 V. Równania nieliniowe i uk³ady równañ liniowych
Tematyka egzaminu z Podstaw sterowania
 Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
TEORIA FUNKCJONA LÓW. (Density Functional Theory - DFT) Monika Musia l
 Monika Musia l") TEORIA FUNKCJONA LÓW GȨSTOŚCI (Density Functional Theory - DFT) Monika Musia l PRZEDMIOT BADAŃ Uk lad N elektronów + K j ader atomowych Przybliżenie Borna-Oppenheimera Zamiast funkcji falowej Ψ(r 1,σ 1,r
TEORIA FUNKCJONA LÓW GȨSTOŚCI (Density Functional Theory - DFT) Monika Musia l PRZEDMIOT BADAŃ Uk lad N elektronów + K j ader atomowych Przybliżenie Borna-Oppenheimera Zamiast funkcji falowej Ψ(r 1,σ 1,r
0.1 Reprezentacja liczb w komputerze
 1 0.1 Reprezentacja liczb w komputerze Zapis liczb w zmiennym przecinku. U lamki dziesiȩtne w laṡciwe i niew laṡciwe piszemy oddzielaj ac czȩṡċ ca lkowit a od czȩṡci u lamkowej w laṡciwej przecinkiem w
1 0.1 Reprezentacja liczb w komputerze Zapis liczb w zmiennym przecinku. U lamki dziesiȩtne w laṡciwe i niew laṡciwe piszemy oddzielaj ac czȩṡċ ca lkowit a od czȩṡci u lamkowej w laṡciwej przecinkiem w
Geometria odwzorowań inżynierskich. Zadania 10
 Scriptiones Geometrica Volumen I (2014), No. Z10, 1 12. Geometria odwzorowań inżynierskich. Zadania 10 Edwin Koźniewski Zak lad Infoemacji Przestrzennej 1. Cień sfery na p lszczyznȩ 1.1. Jeszcze o kolineacji
Scriptiones Geometrica Volumen I (2014), No. Z10, 1 12. Geometria odwzorowań inżynierskich. Zadania 10 Edwin Koźniewski Zak lad Infoemacji Przestrzennej 1. Cień sfery na p lszczyznȩ 1.1. Jeszcze o kolineacji
Rozdzia l 2. Najważniejsze typy algebr stosowane w logice
 Rozdzia l 2. Najważniejsze typy algebr stosowane w logice 1. Algebry Boole a Definicja. Kratȩ dystrybutywn a z zerem i jedynk a, w której dla każdego elementu istnieje jego uzupe lnienie nazywamy algebr
Rozdzia l 2. Najważniejsze typy algebr stosowane w logice 1. Algebry Boole a Definicja. Kratȩ dystrybutywn a z zerem i jedynk a, w której dla każdego elementu istnieje jego uzupe lnienie nazywamy algebr
RACHUNEK OPERATOROWY MIKUSIŃSKIEGO I JEGO ZASTOSOWANIE DO RÓWNAŃ
 RACHUNEK OPERATOROWY MIKUSIŃSKIEGO I JEGO ZASTOSOWANIE DO RÓWNAŃ RÓŻNICZKOWYCH Tomasz Kochanek 1 Twierdzenie Titchmarsha Symbolem C[, ) oznaczać bedziemy przestrzeń wszystkich zespolonych funkcji ciag
RACHUNEK OPERATOROWY MIKUSIŃSKIEGO I JEGO ZASTOSOWANIE DO RÓWNAŃ RÓŻNICZKOWYCH Tomasz Kochanek 1 Twierdzenie Titchmarsha Symbolem C[, ) oznaczać bedziemy przestrzeń wszystkich zespolonych funkcji ciag
Geometria odwzorowań inżynierskich Zadania 02
 Scriptiones Geometrica Volumen I (2007), No. Z2, 1 3. Geometria odwzorowań inżynierskich Zadania 02 1. Odwzorowania w rzucie równoleg lym. Przekroje cd. Konstrukcje p laskie 1.1. Przekszat lcenia na p
Scriptiones Geometrica Volumen I (2007), No. Z2, 1 3. Geometria odwzorowań inżynierskich Zadania 02 1. Odwzorowania w rzucie równoleg lym. Przekroje cd. Konstrukcje p laskie 1.1. Przekszat lcenia na p
Równania różniczkowe. Notatki z wykładu.
 Równania różniczkowe Notatki z wykładu http://robert.brainusers.net 17.06.2009 Notatki własne z wykładu. Są niekompletne, bez bibliografii oraz mogą zawierać błędy i usterki. Z tego powodu niniejszy dokument
Równania różniczkowe Notatki z wykładu http://robert.brainusers.net 17.06.2009 Notatki własne z wykładu. Są niekompletne, bez bibliografii oraz mogą zawierać błędy i usterki. Z tego powodu niniejszy dokument