Zadania kinematyki mechanizmów
|
|
|
- Małgorzata Romanowska
- 7 lat temu
- Przeglądów:
Transkrypt
1 Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki ruch ogniw roboczych
2 Metoda wieloboków wektorowych y a b c e d x rzutowanie a b c d e ax bx cx dx ex ay by cy d y ey
3 O y x Kąt określający kierunek i zwrot wektora: jest kątem skierowanym o początku na kierunku równoległym do osi Ox i końcu na rozpatrywanym wektorze, kręci przeciwnie do wskazówek zegara wokół początku wektora.
4 Parametry wektorów l l s s l, const s, var
5 l l s '' l l 4 ' l l y l s l ' 4 56 l s l l '' ' ' l 4 s 56 s 89 s l l 7 x Osprzęt koparki przedsiębiernej
6 l l s x l cos l cos s cos y l sin l sin s sin y Zadanie odwrotne położenia l,, l, s, s l Zadanie proste położenia l,, l, s, l x
7 Związki kinematyczne równania położeń ogniw mechanizmu l l s l cos l cos s cos l sin l sin s sin l s l ' 4 56 l cos s cos l cos( ) ' ' l sin s sin l sin( ) ' ' l s l l '' ' l sin( ) s sin l sin l sin( ) '' " ' ' l cos( ) s cos l cos l cos( ) '' " ' ' Uzupełnić rysunek
8 Rozwiązanie zadania prostego położenia pierwszego zespołu kinematycznego l,, l, s, l cos l cos s cos l sin l sin s sin ( l cos l cos ) ( s cos ) ( l sin l sin ) ( s sin ) l cos l cos l l cos cos s cos l sin l sin l l sin sin s sin + l l l l cos cos l l sin sin s
9 l l cos cos l l sin sin s l l Acos Bsin D cos x x x sin x tg x x x A B D x x A x Bx D x ( ) ( ) x ( A D) xb A D x, B A B D A D arctg x,,
10 interpretacja rozwiązania l y s arctg x arctg x x l cos l cos s cos l sin l sin s sin
11 Rozwiązanie zadania odwrotnego położenia pierwszego zespołu kinematycznego l,, l, s, ( l cos l cos ) s cos ( l sin l sin ) s sin + l l l l sin sin l l cos cos s s l l l l cos( ) s l l l l cos( ) l cos cos sin sin cos l l l, sin s s
12 zespoły kinematyczne tworzące mechanizm opisuje się wielobokami wektorowymi dla mechanizmów (w=s) zawsze liczba równań układu równań jest równa liczbie niewiadomych zwykle istnieje więcej niż jedno rozwiązanie
13 Zapis równań kinematyki przy użyciu wersorów x i x z i z î i y c b ab axbx ayby azbz a ab abcos c a b b c a ab absin c ba i y iˆ [ i, i, i ] iˆ ˆ i i i x y z
14 Wzór trzech wersorów ik uˆk jk c c c ik jk ij cosik cos cos jk ij uˆi ij uˆ j ik uˆk jk uˆ, uˆ uˆ i j k uˆ Q uˆ Q uˆ Q ( uˆ uˆ ) k i i j j ij i j c ik cijc jk c jk cijc cij c ik ik c jk cijcikc jk k i j i j cij cij cij uˆ uˆ uˆ ( uˆ uˆ )
15 Równania położenia manipulatora RTR iˆ ˆ x [,,] iˆ y [,,] i z [,,] iˆz î î i ˆ, i ˆ x i ˆ, i ˆ z z i ˆ iˆ iˆx î i ˆ, i ˆ ˆ z i
16 Równania położenia manipulatora RTR i ˆ, i ˆ x z i ˆ cx cos( / ) c sin x iˆz î cxz cos( / ) î cz cos( / ) iˆx iˆy î ˆ ˆ ˆ c c c c c c i i i ( iˆ iˆ ) cx cxzcz cz cxzcx xz x z xz x z x z x z cxz cxz cxz i ˆ sin i ˆ sin i ˆ x y i ˆ sin i ˆ cos i ˆ x y
17 Równania położenia manipulatora RTR i ˆ, ˆ ˆ z i i cz cos( / ) iˆz î î cz cos( / ) c cos( / ) iˆx iˆy î i ˆ sin i ˆ cos i ˆ x y ˆ ˆ ˆ c c c c c c i i i ( iˆ iˆ ) cz czc c czcz z z z z z z cz cz cz i ˆ i ˆ i ˆ z iˆ sin ( iˆ iˆ ) cos ( iˆ iˆ ) i ˆ cos ˆ ˆ ix sin i z x z y y
18 Równania położenia manipulatora RTR i ˆ ˆ ˆ, i z i cz cos( / ) cz cos iˆz î î c cos( / ) iˆx î i ˆ sin i ˆ cos i ˆ x y ˆ ˆ ˆ c c c c c c i i i ( iˆ iˆ ) c c zcz cz c zc z z z z z c z c z c z i ˆ cos ˆ ˆ ˆ iz cos ( i iz) i ˆ cos ˆ ˆ iz sini iˆ sin sin iˆ sin cos iˆ cos iˆ x y z z
19 Równania położenia manipulatora RTR p ˆ ˆ ˆ ˆ ˆ ˆ ˆ xix pyiy pziz (sini x cos i y ) (cosi x sin i y) l (sin sin ˆi sin cos ˆi cos ˆi ) x y z px p y pz sin cos l sin sin cos sin l cos sin l cos
20 Rozwiązania Chace a fˆk uˆi ( ) u uˆ u uˆ u uˆ i i j j k k. uˆk uˆ j ( ) uˆ Auˆ B fˆ i i k i k uˆi ( ) u ˆ ( ) j uˆ Auˆ B fˆ j j k j k i k j j j k i u u u u u u u uˆ uˆ fˆ u u u u u k i i k i i k k u u u u u u j k i j k i uˆ uˆ fˆ u u u u k j k j j k k
21 uˆi u i uuˆ u uˆ u uˆ i i j j k k uˆk uˆ j u j u k u u u u u u u u u ( uˆ uˆ ˆ ˆ ˆ ˆ k k k ) i i j j i i j j u u u u u ( uˆ uˆ ) k i j i j i j uˆ k uuˆ u uˆ i i j j u k
22 Zadanie proste położenia platformy symulatora Dane: lad, lbc, l, ˆ BE x [,,] ˆ i [,,] s, s, s, i y i ˆ z [,,] y iˆy B î ˆf E. î î 4 s s AE s C î Szukane: î 4 s AE ˆ ˆ ˆ sis i l AD i x f ˆ i ˆ i ˆ z l iˆ s iˆ s iˆ BC 4 s ˆ ˆ AE si l BE i 4 iˆz iˆx s x A D
23 Zadanie odwrotne położenia platformy symulatora Dane: lad, lbc, lbe, i ˆ x [,,] i ˆ y [,,] i ˆ 4, s AE i ˆ z [,,] Szukane: s, s, s y B ˆf E. C s iˆ s AE l BE iˆ 4 iˆz iˆy î î î 4 s s AE s iˆx s î x s iˆ l iˆ s iˆ AD x s iˆ s iˆ l ˆ BC i 4 A D
24 Notacja Denavita-Hartenberga X X i i Z i Zi Transformacja układu i- do układu i
25 Obrót wokół Z i- o kąt i y i cos i Yi Y y y i- x i sin i P y i sin i Zi Z x X x i cos i x i- i X i x xi cosi yi sini zi y x sin y cos z i i i i i z x y z i i i i
26 x cosi sini xi y sini cosi y i z zi ' A - macierz obrotu wokół Z i- i
27 Przesunięcie wzdłuż Z o i z z i Z Z Y Y P X X i X '' x x y z y x y z z x y z i A - macierz przesunięcia ' wzdłuż Z x x y y z i z
28 Przesunięcie wzdłuż X o li l i ''' A '' macierz przesunięcia wzdłuż X Obrót wokół X o kąt i i cosi sin i A ''' sini cosi macierz obrotu wokół X
29 Macierz przejścia z układu i- do układu i xi xi xi i ''' '' ' i y i y i y i A A A A A z ''' '' ' i i i z i zi ci si li s c c c s s i i i i i i i i A i s is i c is i c i ic i
30 Macierz przejścia z układu i do układu i- i i A i i A c i s ic i s is i lic i s i c ic i c is i lis i A i s i c i i i i A A i i i?
31 Notacja D-H w przypadku pary obrotowej i var, i const, li const, i const
32 Notacja D-H w przypadku pary przesuwnej const, var, l const, const i i i i
33 Kinematyka manipulatora RTR i i l i i (var) (9 o ) (9 o ) (9 o ) (var) ( o ) l (var)
34 Macierze przejścia c i s ic i s is i lic i s i c ic i c is i lis i A i s i c i i i c s c9 s s9 c c s o o o o s c c9 c s9 s s c o o A s9 c9
35 o o o o o o c9 s9 c9 s9 s9 c9 o o o o o o s c c c s s A o o s9 c9 c s c s s l c c s l c o o o o s c c c s ls s c ls o o s c A
36 r O T c s lc lc s c ls ls r A r O O r O
37 ro l c l s T lc ls lc r A r O ls O r O
38 ro lc ls T c s s c l c ro A r O ls r O
39 Wektor wodzący środka chwytaka wyrażony w układzie r O c s ( ls ) s c ( ls ) lc r p c s ( l s ) O x x r p s c ( l s ) O y O z y r p l c z r O
40 Zadanie odwrotne położenia manipulatora: p, p, p,, x y z p c s ( l s ) x p s c ( l s ) y pz l c p z, l c p c c c s ( l s ) x p s s c s ( l s ) y x p c p s + y
41 p c p s x y t tg t t c s t t p x t t p y t t p ( t ) p t ( t ) x y t ( px) t py px t, t arc tan( t ) arc tan( t ) p c ls x s
42 Konfiguracje położenia manipulatora RTR,,,,,,,,
43
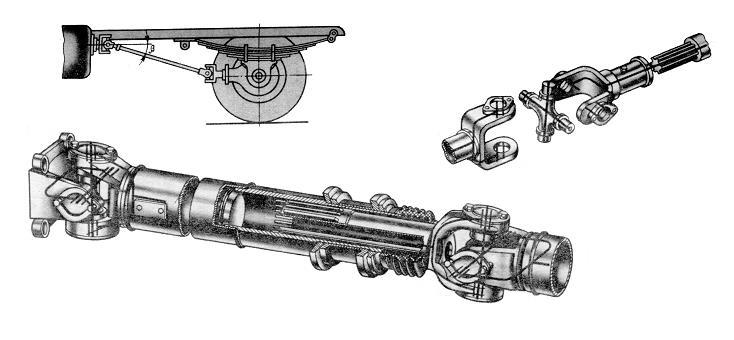
44 Sprzęgło krzyżakowe (Cardana, Hooke a) Sferyczny czworobok przegubowy Sprzęgło krzyżakowe
45 ˆx ẑ ẑ Kinematyka sprzęgła krzyżakowego ẑ zˆ ˆx ˆx

46 ˆx ẑ ŷ ẑ Kinematyka sprzęgła krzyżakowego zˆ = yˆ ẑ zˆ T zˆ ˆx ˆx z T l l
47 c i s ic i s is i lic i s i c ic i c is i lis i A i s i c i i i l cos sin sin cos A
48 ci si li s c c c s s i i i i i i i i A i s is i c is i c i ic i l cos sin sin cos cos cos sin sin sin cos sin cos A
49 zˆ A zˆ zˆ cos sin sin cos A zˆ sin cos
50 zˆ A zˆ cos sin sin cos cos cos sin sin sin cos sin cos A zˆ zˆ sin coscos cossin
51 zˆ zˆ zˆ sin cos zˆ sin coscos cossin sin sin cos cos cos tan tan cos
52 d d tan tan cos d d tan tan tan tan tan tan tan tan d d tan cos tan
53 d d tan tan cos tan tan cos d d tan tan cos cos Przełożenie kinematyczne sprzęgła krzyżakowego d d dt d d dt d d
54 ,4,74,4 [ rad] Przełożenie kinematyczne pojedynczego sprzęgła krzyżakowego w funkcji kąta obrotu wałka wejściowego
55 5 5 4 Schemat podwójnego sprzęgła krzyżakowego 5,,4 współpłaszczyznowe 5

56 Aplikacje techniczne
57 ) Definicja wersora i jego własności. ) Własności iloczynów skalarnego, wektorowego i mieszanego. ) Zadanie proste i odwrotne kinematyki. 4) Metoda wieloboków wektorowych. 5) Parametry wektorów opisujących ogniwa mechanizmów. 6) Konfiguracje mechanizmu. 7) Wzór trzech wersorów. 8) Równanie kinematyki położenia sprzęgła krzyżakowego. 9) Przełożenie kinematyczne sprzęgła krzyżakowego. )Rozwiązania Chace a dla trójkąta wektorowego. ) Notacja Denavita-Hartenberga. )Macierz przejścia dla notacji D-H. )Zadanie odwrotne położenia manipulatora RTR.
Zadania kinematyki mechanizmów
 Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki
Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki
Ogłoszenie. Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz
 Laboratorium Badań Technoklimatycznych i Maszyn Roboczych Ogłoszenie Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz. 9 00 12 00. II
Laboratorium Badań Technoklimatycznych i Maszyn Roboczych Ogłoszenie Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz. 9 00 12 00. II
Egzamin 1 Strona 1. Egzamin - AR egz Zad 1. Rozwiązanie: Zad. 2. Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same
 Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
i = [ 0] j = [ 1] k = [ 0]
![i = [ 0] j = [ 1] k = [ 0]](/thumbs/70/62901734.jpg "i = [ 0] j = [ 1] k = [ 0]") Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
GEOMETRIA ANALITYCZNA W PRZESTRZENI
 Wykład z Podstaw matematyki dla studentów Inżynierii Środowiska Wykład 13. Egzaminy I termin wtorek 31.01 14:00 Aula A Wydział Budownictwa II termin poprawkowy czwartek 9.02 14:00 Aula A Wydział Budownictwa
Wykład z Podstaw matematyki dla studentów Inżynierii Środowiska Wykład 13. Egzaminy I termin wtorek 31.01 14:00 Aula A Wydział Budownictwa II termin poprawkowy czwartek 9.02 14:00 Aula A Wydział Budownictwa
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
1. K 5 Ruch postępowy i obrotowy ciała sztywnego
 1. K 5 Ruch postępowy i obrotowy ciała sztywnego Zadanie 1 Koło napędowe o promieniu r 1 =1m przekładni ciernej wprawia w ruch koło o promieniu r =0,5m z przyspieszeniem 1 =0, t. Po jakim czasie prędkość
1. K 5 Ruch postępowy i obrotowy ciała sztywnego Zadanie 1 Koło napędowe o promieniu r 1 =1m przekładni ciernej wprawia w ruch koło o promieniu r =0,5m z przyspieszeniem 1 =0, t. Po jakim czasie prędkość
Elementy geometrii analitycznej w R 3
 Rozdział 12 Elementy geometrii analitycznej w R 3 Elementy trójwymiarowej przestrzeni rzeczywistej R 3 = {(x,y,z) : x,y,z R} możemy interpretować co najmniej na trzy sposoby, tzn. jako: zbiór punktów (x,
Rozdział 12 Elementy geometrii analitycznej w R 3 Elementy trójwymiarowej przestrzeni rzeczywistej R 3 = {(x,y,z) : x,y,z R} możemy interpretować co najmniej na trzy sposoby, tzn. jako: zbiór punktów (x,
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Geometria w R 3. Iloczyn skalarny wektorów
 Geometria w R 3 Andrzej Musielak Str 1 Geometria w R 3 Działania na wektorach Wektory w R 3 możemy w naturalny sposób dodawać i odejmować, np.: [2, 3, 1] + [ 1, 2, 1] = [1, 5, 2] [2, 3, 1] [ 1, 2, 1] =
Geometria w R 3 Andrzej Musielak Str 1 Geometria w R 3 Działania na wektorach Wektory w R 3 możemy w naturalny sposób dodawać i odejmować, np.: [2, 3, 1] + [ 1, 2, 1] = [1, 5, 2] [2, 3, 1] [ 1, 2, 1] =
1. Liczby zespolone i
 Zadania podstawowe Liczby zespolone Zadanie Podać część rzeczywistą i urojoną następujących liczb zespolonych: z = ( + 7i)( + i) + ( 5 i)( + 7i), z = + i, z = + i i, z 4 = i + i + i i Zadanie Dla jakich
Zadania podstawowe Liczby zespolone Zadanie Podać część rzeczywistą i urojoną następujących liczb zespolonych: z = ( + 7i)( + i) + ( 5 i)( + 7i), z = + i, z = + i i, z 4 = i + i + i i Zadanie Dla jakich
Układy współrzędnych
 Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
dr Mariusz Grządziel 15,29 kwietnia 2014 Przestrzeń R k R k = R R... R k razy Elementy R k wektory;
 Wykłady 8 i 9 Pojęcia przestrzeni wektorowej i macierzy Układy równań liniowych Elementy algebry macierzy dodawanie, odejmowanie, mnożenie macierzy; macierz odwrotna dr Mariusz Grządziel 15,29 kwietnia
Wykłady 8 i 9 Pojęcia przestrzeni wektorowej i macierzy Układy równań liniowych Elementy algebry macierzy dodawanie, odejmowanie, mnożenie macierzy; macierz odwrotna dr Mariusz Grządziel 15,29 kwietnia
Notacja Denavita-Hartenberga
 Notacja DenavitaHartenberga Materiały do ćwiczeń z Podstaw Robotyki Artur Gmerek Umiejętność rozwiązywania prostego zagadnienia kinematycznego jest najbardziej bazową umiejętność zakresu Robotyki. Wyznaczyć
Notacja DenavitaHartenberga Materiały do ćwiczeń z Podstaw Robotyki Artur Gmerek Umiejętność rozwiązywania prostego zagadnienia kinematycznego jest najbardziej bazową umiejętność zakresu Robotyki. Wyznaczyć
Analityczne metody kinematyki mechanizmów
 J Buśkiewicz Analityczne Metoy Kinematyki w Teorii Mechanizmów Analityczne metoy kinematyki mechanizmów Spis treści Współrzęne opisujące położenia ogniw pary kinematycznej Mechanizm korowo-wozikowy (crank-slier
J Buśkiewicz Analityczne Metoy Kinematyki w Teorii Mechanizmów Analityczne metoy kinematyki mechanizmów Spis treści Współrzęne opisujące położenia ogniw pary kinematycznej Mechanizm korowo-wozikowy (crank-slier
WYBRANE DZIAŁY ANALIZY MATEMATYCZNEJ. Wykład II
 Wykład II I. Algebra wektorów 2.1 Iloczyn wektorowy pary wektorów. 2.1.1 Orientacja przestrzeni Załóżmy, że trójka wektorów a, b i c jest niekomplanarna. Wynika z tego, że żaden z tych wektorów nie jest
Wykład II I. Algebra wektorów 2.1 Iloczyn wektorowy pary wektorów. 2.1.1 Orientacja przestrzeni Załóżmy, że trójka wektorów a, b i c jest niekomplanarna. Wynika z tego, że żaden z tych wektorów nie jest
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka
 Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Dynamika mechanizmów
 Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
TENSOMETRIA ZARYS TEORETYCZNY
 TENSOMETRIA ZARYS TEORETYCZNY Stan naprężenia jest niemożliwy do pomiaru, natomiast łatwo zmierzyć stan odkształcenia na powierzchni zewnętrznej badanej konstrukcji. Aby wyznaczyć stan naprężenia trzeba
TENSOMETRIA ZARYS TEORETYCZNY Stan naprężenia jest niemożliwy do pomiaru, natomiast łatwo zmierzyć stan odkształcenia na powierzchni zewnętrznej badanej konstrukcji. Aby wyznaczyć stan naprężenia trzeba
PODSTAWY RACHUNKU WEKTOROWEGO
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Skalar Definicja Skalar wielkość fizyczna (lub geometryczna)
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Skalar Definicja Skalar wielkość fizyczna (lub geometryczna)
GEOMETRIA ANALITYCZNA W PRZESTRZENI
 GEOMETRIA ANALITYCZNA W PRZESTRZENI Położenie punktu w przestrzeni określamy za pomocą trzech liczb (x, y, z). Liczby te odpowiadają rzutom na osie układu współrzędnych: każdy rzut wzdłuż płaszczyzny równoległej
GEOMETRIA ANALITYCZNA W PRZESTRZENI Położenie punktu w przestrzeni określamy za pomocą trzech liczb (x, y, z). Liczby te odpowiadają rzutom na osie układu współrzędnych: każdy rzut wzdłuż płaszczyzny równoległej
Z poprzedniego wykładu:
 Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I
![2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I](/thumbs/88/115575416.jpg "2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I") Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
PYTANIA KONTROLNE STAN NAPRĘŻENIA, ODKSZTAŁCENIA PRAWO HOOKE A
 PYTANIA KONTROLNE STAN NAPRĘŻENIA, ODKSZTAŁCENIA PRAWO HOOKE A TENSOMETRIA ZARYS TEORETYCZNY Stan naprężenia jest niemożliwy do pomiaru, natomiast łatwo zmierzyć stan odkształcenia na powierzchni zewnętrznej
PYTANIA KONTROLNE STAN NAPRĘŻENIA, ODKSZTAŁCENIA PRAWO HOOKE A TENSOMETRIA ZARYS TEORETYCZNY Stan naprężenia jest niemożliwy do pomiaru, natomiast łatwo zmierzyć stan odkształcenia na powierzchni zewnętrznej
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
A,B M! v V ; A + v = B, (1.3) AB = v. (1.4)
 AB = v. (1.4)") Rozdział 1 Prosta i płaszczyzna 1.1 Przestrzeń afiniczna Przestrzeń afiniczna to matematyczny model przestrzeni jednorodnej, bez wyróżnionego punktu. Można w niej przesuwać punkty równolegle do zadanego
Rozdział 1 Prosta i płaszczyzna 1.1 Przestrzeń afiniczna Przestrzeń afiniczna to matematyczny model przestrzeni jednorodnej, bez wyróżnionego punktu. Można w niej przesuwać punkty równolegle do zadanego
Dr Kazimierz Sierański www. If.pwr.wroc.pl/~sieranski Konsultacje pok. 320 A-1: codziennie po ćwiczeniach
 Dr Kazimierz Sierański kazimierz.sieranski@pwr.edu.pl www. If.pwr.wroc.pl/~sieranski Konsultacje pok. 320 A-1: codziennie po ćwiczeniach Forma zaliczenia kursu: egzamin końcowy Grupa kursów -warunkiem
Dr Kazimierz Sierański kazimierz.sieranski@pwr.edu.pl www. If.pwr.wroc.pl/~sieranski Konsultacje pok. 320 A-1: codziennie po ćwiczeniach Forma zaliczenia kursu: egzamin końcowy Grupa kursów -warunkiem
Podstawy Robotyki Określenie kinematyki oraz dynamiki manipulatora
 Podstawy Robotyki Określenie kinematyki oraz dynamiki manipulatora AiR V sem. Gr. A4/ Wicher Bartłomiej Pilewski Wiktor 9 stycznia 011 1 1 Wstęp Rysunek 1: Schematyczne przedstawienie manipulatora W poniższym
Podstawy Robotyki Określenie kinematyki oraz dynamiki manipulatora AiR V sem. Gr. A4/ Wicher Bartłomiej Pilewski Wiktor 9 stycznia 011 1 1 Wstęp Rysunek 1: Schematyczne przedstawienie manipulatora W poniższym
UKŁADY WIELOCZŁONOWE Z WIĘZAMI JEDNOSTRONNYMI W ZASTOSOWANIU DO MODELOWANIA ZŁOŻONYCH UKŁADÓW MECHANICZNYCH
 POLITECHNIKA GDAŃSKA KRZYSZTOF LIPIŃSKI UKŁADY WIELOCZŁONOWE Z WIĘZAMI JEDNOSTRONNYMI W ZASTOSOWANIU DO MODELOWANIA ZŁOŻONYCH UKŁADÓW MECHANICZNYCH GDAŃSK 2012 PRZEWODNICZĄCY KOMITETU REDAKCYJNEGO WYDAWNICTWA
POLITECHNIKA GDAŃSKA KRZYSZTOF LIPIŃSKI UKŁADY WIELOCZŁONOWE Z WIĘZAMI JEDNOSTRONNYMI W ZASTOSOWANIU DO MODELOWANIA ZŁOŻONYCH UKŁADÓW MECHANICZNYCH GDAŃSK 2012 PRZEWODNICZĄCY KOMITETU REDAKCYJNEGO WYDAWNICTWA
KATEDRA AUTOMATYKI, BIOMECHANIKI I MECHATRONIKI. Laboratorium Mechaniki technicznej
 KATEDRA AUTOMATYKI, BIOMECHANIKI I MECHATRONIKI Laboratorium Mechaniki technicznej Ćwiczenie 1 Badanie kinematyki czworoboku przegubowego metodą analitycznonumeryczną. 1 Cel ćwiczenia Celem ćwiczenia jest
KATEDRA AUTOMATYKI, BIOMECHANIKI I MECHATRONIKI Laboratorium Mechaniki technicznej Ćwiczenie 1 Badanie kinematyki czworoboku przegubowego metodą analitycznonumeryczną. 1 Cel ćwiczenia Celem ćwiczenia jest
Dynamika manipulatora. Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska. Podstawy robotyki wykład VI
 Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu w postaci
Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu w postaci
Algebra liniowa II. Lista 1. 1 u w 0 1 v 0 0 1
 Algebra liniowa II Lista Zadanie Udowodnić, że jeśli B b ij jest macierzą górnotrójkątną o rozmiarze m m, to jej wyznacznik jest równy iloczynowi elementów leżących na głównej przekątnej: det B b b b mm
Algebra liniowa II Lista Zadanie Udowodnić, że jeśli B b ij jest macierzą górnotrójkątną o rozmiarze m m, to jej wyznacznik jest równy iloczynowi elementów leżących na głównej przekątnej: det B b b b mm
ALGEBRA LINIOWA 2. Lista zadań 2003/2004. Opracowanie : dr Teresa Jurlewicz, dr Zbigniew Skoczylas
 ALGEBRA LINIOWA 2 Lista zadań 23/24 Opracowanie : dr Teresa Jurlewicz dr Zbigniew Skoczylas Lista pierwsza Zadanie Uzasadnić z definicji że zbiór wszystkich rzeczywistych macierzy trójkątnych górnych stopnia
ALGEBRA LINIOWA 2 Lista zadań 23/24 Opracowanie : dr Teresa Jurlewicz dr Zbigniew Skoczylas Lista pierwsza Zadanie Uzasadnić z definicji że zbiór wszystkich rzeczywistych macierzy trójkątnych górnych stopnia
Geometria analityczna - przykłady
 Geometria analityczna - przykłady 1. Znaleźć równanie ogólne i równania parametryczne prostej w R 2, któr przechodzi przez punkt ( 4, ) oraz (a) jest równoległa do prostej x + 5y 2 = 0. (b) jest prostopadła
Geometria analityczna - przykłady 1. Znaleźć równanie ogólne i równania parametryczne prostej w R 2, któr przechodzi przez punkt ( 4, ) oraz (a) jest równoległa do prostej x + 5y 2 = 0. (b) jest prostopadła
KATEDRA AUTOMATYKI, BIOMECHANIKI I MECHATRONIKI. Laboratorium Mechaniki technicznej
 KATEDRA AUTOMATYKI, BIOMECHANIKI I MECHATRONIKI Laboratorium Mechaniki technicznej Ćwiczenie 1 Badanie kinematyki czworoboku przegubowego metodą analitycznonumeryczną. 1 Cel ćwiczenia Celem ćwiczenia jest
KATEDRA AUTOMATYKI, BIOMECHANIKI I MECHATRONIKI Laboratorium Mechaniki technicznej Ćwiczenie 1 Badanie kinematyki czworoboku przegubowego metodą analitycznonumeryczną. 1 Cel ćwiczenia Celem ćwiczenia jest
Wykład 14. Elementy algebry macierzy
 Wykład 14 Elementy algebry macierzy dr Mariusz Grządziel 26 stycznia 2009 Układ równań z dwoma niewiadomymi Rozważmy układ równań z dwoma niewiadomymi: a 11 x + a 12 y = h 1 a 21 x + a 22 y = h 2 a 11,
Wykład 14 Elementy algebry macierzy dr Mariusz Grządziel 26 stycznia 2009 Układ równań z dwoma niewiadomymi Rozważmy układ równań z dwoma niewiadomymi: a 11 x + a 12 y = h 1 a 21 x + a 22 y = h 2 a 11,
Zadania egzaminacyjne
 Rozdział 13 Zadania egzaminacyjne Egzamin z algebry liniowej AiR termin I 03022011 Zadanie 1 Wyznacz sumę rozwiązań równania: (8z + 1 i 2 2 7 iz 4 = 0 Zadanie 2 Niech u 0 = (1, 2, 1 Rozważmy odwzorowanie
Rozdział 13 Zadania egzaminacyjne Egzamin z algebry liniowej AiR termin I 03022011 Zadanie 1 Wyznacz sumę rozwiązań równania: (8z + 1 i 2 2 7 iz 4 = 0 Zadanie 2 Niech u 0 = (1, 2, 1 Rozważmy odwzorowanie
Przekształcenia liniowe
 Przekształcenia liniowe Zadania Które z następujących przekształceń są liniowe? (a) T : R 2 R 2, T (x, x 2 ) = (2x, x x 2 ), (b) T : R 2 R 2, T (x, x 2 ) = (x + 3x 2, x 2 ), (c) T : R 2 R, T (x, x 2 )
Przekształcenia liniowe Zadania Które z następujących przekształceń są liniowe? (a) T : R 2 R 2, T (x, x 2 ) = (2x, x x 2 ), (b) T : R 2 R 2, T (x, x 2 ) = (x + 3x 2, x 2 ), (c) T : R 2 R, T (x, x 2 )
Rozwiązanie: I sposób Dla prostego manipulatora płaskiego można w sposób klasyczny wyznaczyćpołożenie punktu C.
 Instrukcja laboratoryjna do WORKING MODEL 2D. 1.Wstęp teoretyczny. Do opisu kinematyki prostej niezbędne jest podanie równańkinematyki robota. Zadanie kinematyki prostej można określićnastępująco: posiadając
Instrukcja laboratoryjna do WORKING MODEL 2D. 1.Wstęp teoretyczny. Do opisu kinematyki prostej niezbędne jest podanie równańkinematyki robota. Zadanie kinematyki prostej można określićnastępująco: posiadając
KMO2D. Kolizje między-obiektowe w 2D
 KMO2D Kolizje między-obiektowe w 2D I. Wstęp 3 lata temu na temat kolizji nie miałem żadnego pojęcia. Przyszedł jednak czas, gdy postanowiłem napisać pierwszą porządną grę i pojawił się, wtedy problem.
KMO2D Kolizje między-obiektowe w 2D I. Wstęp 3 lata temu na temat kolizji nie miałem żadnego pojęcia. Przyszedł jednak czas, gdy postanowiłem napisać pierwszą porządną grę i pojawił się, wtedy problem.
OPISY PRZESTRZENNE I PRZEKSZTAŁCENIA
 OPISY PRZESTRZENNE I PRZEKSZTAŁCENIA Wprowadzenie W robotyce przez pojęcie manipulacji rozumiemy przemieszczanie w przestrzeni przedmiotów i narzędzi za pomocą specjalnego mechanizmu. W związku z tym pojawia
OPISY PRZESTRZENNE I PRZEKSZTAŁCENIA Wprowadzenie W robotyce przez pojęcie manipulacji rozumiemy przemieszczanie w przestrzeni przedmiotów i narzędzi za pomocą specjalnego mechanizmu. W związku z tym pojawia
MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH CATIA I MATLAB MODEL OF SERIAL MANIPULATOR IN CATIA AND MATLAB
 Kocurek Łukasz, mgr inż. email: kocurek.lukasz@gmail.com Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH
Kocurek Łukasz, mgr inż. email: kocurek.lukasz@gmail.com Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH
13 Układy równań liniowych
 13 Układy równań liniowych Definicja 13.1 Niech m, n N. Układem równań liniowych nad ciałem F m równaniach i n niewiadomych x 1, x 2,..., x n nazywamy koniunkcję równań postaci a 11 x 1 + a 12 x 2 +...
13 Układy równań liniowych Definicja 13.1 Niech m, n N. Układem równań liniowych nad ciałem F m równaniach i n niewiadomych x 1, x 2,..., x n nazywamy koniunkcję równań postaci a 11 x 1 + a 12 x 2 +...
3. PŁASKI STAN NAPRĘŻENIA I ODKSZTAŁCENIA
 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA 1 3. 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA Analizując płaski stan naprężenia posługujemy się składowymi tensora naprężenia w postaci wektora {,,y } (3.1) Za dodatnie
3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA 1 3. 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA Analizując płaski stan naprężenia posługujemy się składowymi tensora naprężenia w postaci wektora {,,y } (3.1) Za dodatnie
stosunek przyrostu funkcji y do odpowiadajacego dy dx = lim y wielkości fizycznej x, y = f(x), to pochodna dy v = ds edkości wzgl edem czasu, a = dv
, to pochodna dy v = ds edkości wzgl edem czasu, a = dv") Matematyka Pochodna Pochodna funkcji y = f(x) w punkcie x nazywamy granice, do której daży stosunek przyrostu funkcji y do odpowiadajacego mu przyrostu zmiennej niezaleźnej x, g przyrost zmiennej daży
Matematyka Pochodna Pochodna funkcji y = f(x) w punkcie x nazywamy granice, do której daży stosunek przyrostu funkcji y do odpowiadajacego mu przyrostu zmiennej niezaleźnej x, g przyrost zmiennej daży
Podstawy robotyki wykład VI. Dynamika manipulatora
 Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu
Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu
R o z w i ą z a n i e Przy zastosowaniu sposobu analitycznego należy wyznaczyć składowe wypadkowej P x i P y
 Przykład 1 Dane są trzy siły: P 1 = 3i + 4j, P 2 = 2i 5j, P 3 = 7i + 3j (składowe sił wyrażone są w niutonach), przecinające się w punkcie A (1, 2). Wyznaczyć wektor wypadkowej i jej wartość oraz kąt α
Przykład 1 Dane są trzy siły: P 1 = 3i + 4j, P 2 = 2i 5j, P 3 = 7i + 3j (składowe sił wyrażone są w niutonach), przecinające się w punkcie A (1, 2). Wyznaczyć wektor wypadkowej i jej wartość oraz kąt α
5 Równania różniczkowe zwyczajne rzędu drugiego
 5 Równania różniczkowe zwyczajne rzędu drugiego Definicja 5.1. Równaniem różniczkowym zwyczajnym rzędu drugiego nazywamy równanie postaci F ( x, y, y, y ) = 0, (12) w którym niewiadomą jest funkcja y =
5 Równania różniczkowe zwyczajne rzędu drugiego Definicja 5.1. Równaniem różniczkowym zwyczajnym rzędu drugiego nazywamy równanie postaci F ( x, y, y, y ) = 0, (12) w którym niewiadomą jest funkcja y =
1 Geometria analityczna
 1 Geometria analityczna 1.1 Wektory na płaszczyźnie Wektor to uporządkowana para punktów, z których pierwszy nazywa się początkiem, a drugi końcem wektora. Jeżeli wprowadzimy prostokątny układ współrzędnych,
1 Geometria analityczna 1.1 Wektory na płaszczyźnie Wektor to uporządkowana para punktów, z których pierwszy nazywa się początkiem, a drugi końcem wektora. Jeżeli wprowadzimy prostokątny układ współrzędnych,
Spis treści. Przedmowa... 7
 Spis treści SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac przygotowanych... 22 1.4. Przyrost funkcji i wariacja funkcji...
Spis treści SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac przygotowanych... 22 1.4. Przyrost funkcji i wariacja funkcji...
Macierze i Wyznaczniki
 dr Krzysztof Żyjewski MiBM; S-I 0.inż. 0 października 04 Macierze i Wyznaczniki Kilka wzorów i informacji pomocniczych: Definicja. Iloczynem macierzy A = [a ij m n, i macierzy B = [b ij n p nazywamy macierz
dr Krzysztof Żyjewski MiBM; S-I 0.inż. 0 października 04 Macierze i Wyznaczniki Kilka wzorów i informacji pomocniczych: Definicja. Iloczynem macierzy A = [a ij m n, i macierzy B = [b ij n p nazywamy macierz
Etap 1. Rysunek: Układy odniesienia
 Wprowadzenie. Jaś i Małgosia kręcą się na karuzeli symetrycznej dwuramiennej. Siedzą na karuzeli zwróceni do siebie twarzami, symetrycznie względem osi obrotu karuzeli. Jaś ma dropsa, którego chce dać
Wprowadzenie. Jaś i Małgosia kręcą się na karuzeli symetrycznej dwuramiennej. Siedzą na karuzeli zwróceni do siebie twarzami, symetrycznie względem osi obrotu karuzeli. Jaś ma dropsa, którego chce dać
ALGEBRA z GEOMETRIA, ANALITYCZNA,
 ALGEBRA z GEOMETRIA, ANALITYCZNA, MAT00405 PRZEKSZTAL CANIE WYRAZ EN ALGEBRAICZNYCH, WZO R DWUMIANOWY NEWTONA Uprościć podane wyrażenia 7; (b) ( 6)( + ); (c) a 5 6 8a ; (d) ( 5 )( 5 + ); (e) ( 45x 4 y
ALGEBRA z GEOMETRIA, ANALITYCZNA, MAT00405 PRZEKSZTAL CANIE WYRAZ EN ALGEBRAICZNYCH, WZO R DWUMIANOWY NEWTONA Uprościć podane wyrażenia 7; (b) ( 6)( + ); (c) a 5 6 8a ; (d) ( 5 )( 5 + ); (e) ( 45x 4 y
Matematyka Lista 1 1. Matematyka. Lista Obliczyć lub uprościć zapis (zapisać jako potęgę):
:") Matematyka Lista 1 1 Matematyka Lista 1 1. Obliczyć lub uprościć zapis (zapisać jako potęgę): 3 3 3 ( ) 1 4 2 5 8 3 100 3 2 4 1 3 4 2 4 9 1 3 3 9 3. 5 2. Rozwiązać równania i nierówności: 4 2x+1 = 8 5x
Matematyka Lista 1 1 Matematyka Lista 1 1. Obliczyć lub uprościć zapis (zapisać jako potęgę): 3 3 3 ( ) 1 4 2 5 8 3 100 3 2 4 1 3 4 2 4 9 1 3 3 9 3. 5 2. Rozwiązać równania i nierówności: 4 2x+1 = 8 5x
Rozwiązania zadań z kolokwium w dniu r. Zarządzanie Inżynierskie, WDAM, grupy I i II
 Rozwiązania zadań z kolokwium w dniu 10.1.010r. Zarządzanie Inżynierskie, WDAM, grupy I i II Zadanie 1. Wyznacz dziedzinę naturalną funkcji f (x) = x 4x + 3 x + x + log arc sin 1 x. Rozwiązanie. Wymagane
Rozwiązania zadań z kolokwium w dniu 10.1.010r. Zarządzanie Inżynierskie, WDAM, grupy I i II Zadanie 1. Wyznacz dziedzinę naturalną funkcji f (x) = x 4x + 3 x + x + log arc sin 1 x. Rozwiązanie. Wymagane
Manipulatory i roboty mobilne AR S1 semestr 5
 Manipulatory i roboty mobilne AR S semestr 5 Konrad Słodowicz MN: Zadanie proste kinematyki manipulatora szeregowego - DOF Położenie manipulatora opisać można dwojako w przestrzeni kartezjańskiej lub zmiennych
Manipulatory i roboty mobilne AR S semestr 5 Konrad Słodowicz MN: Zadanie proste kinematyki manipulatora szeregowego - DOF Położenie manipulatora opisać można dwojako w przestrzeni kartezjańskiej lub zmiennych
Funkcje analityczne. Wykład 4. Odwzorowania wiernokątne. Paweł Mleczko. Funkcje analityczne (rok akademicki 2017/2018)
") Funkcje analityczne Wykład 4. Odwzorowania wiernokątne Paweł Mleczko Funkcje analityczne (rok akademicki 2017/2018) 1. Przekształcenia płaszczyzny Płaszczyzna jako przestrzeń liniowa, odwzorowania liniowe
Funkcje analityczne Wykład 4. Odwzorowania wiernokątne Paweł Mleczko Funkcje analityczne (rok akademicki 2017/2018) 1. Przekształcenia płaszczyzny Płaszczyzna jako przestrzeń liniowa, odwzorowania liniowe
Laboratorium Podstaw Robotyki ĆWICZENIE 5
 Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów ĆWICZENIE 5 Rotacje 3D, transformacje jednorodne i kinematyka manipulatorów. Celem ćwiczenia jest analiza wybranych
Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów ĆWICZENIE 5 Rotacje 3D, transformacje jednorodne i kinematyka manipulatorów. Celem ćwiczenia jest analiza wybranych
= i Ponieważ pierwiastkami stopnia 3 z 1 są (jak łatwo wyliczyć) liczby 1, 1+i 3
 liczby 1, 1+i 3") ZESTAW I 1. Rozwiązać równanie. Pierwiastki zaznaczyć w płaszczyźnie zespolonej. z 3 8(1 + i) 3 0, Sposób 1. Korzystamy ze wzoru a 3 b 3 (a b)(a 2 + ab + b 2 ), co daje: (z 2 2i)(z 2 + 2(1 + i)z + (1 +
ZESTAW I 1. Rozwiązać równanie. Pierwiastki zaznaczyć w płaszczyźnie zespolonej. z 3 8(1 + i) 3 0, Sposób 1. Korzystamy ze wzoru a 3 b 3 (a b)(a 2 + ab + b 2 ), co daje: (z 2 2i)(z 2 + 2(1 + i)z + (1 +
Analiza matematyczna 2 zadania z odpowiedziami
 Analiza matematyczna zadania z odpowiedziami Maciej Burnecki strona główna Spis treści I Całki niewłaściwe pierwszego rodzaju II Całki niewłaściwe drugiego rodzaju 5 III Szeregi liczbowe 6 IV Szeregi potęgowe
Analiza matematyczna zadania z odpowiedziami Maciej Burnecki strona główna Spis treści I Całki niewłaściwe pierwszego rodzaju II Całki niewłaściwe drugiego rodzaju 5 III Szeregi liczbowe 6 IV Szeregi potęgowe
VII.1 Pojęcia podstawowe.
 II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
R o z d z i a ł 2 KINEMATYKA PUNKTU MATERIALNEGO
 R o z d z i a ł KINEMATYKA PUNKTU MATERIALNEGO Kinematyka zajmuje się opisem ruchu ciał bez uwzględniania ich masy i bez rozpatrywania przyczyn, które ten ruch spowodowały. Przez punkt materialny rozumiemy
R o z d z i a ł KINEMATYKA PUNKTU MATERIALNEGO Kinematyka zajmuje się opisem ruchu ciał bez uwzględniania ich masy i bez rozpatrywania przyczyn, które ten ruch spowodowały. Przez punkt materialny rozumiemy
PAiTM - zima 2014/2015
 PAiTM - zima 204/205 Wyznaczanie przyspieszeń mechanizmu płaskiego metodą planu przyspieszeń (metoda wykreślna) Dane: geometria mechanizmu (wymiary elementów, ich położenie i orientacja) oraz stała prędkość
PAiTM - zima 204/205 Wyznaczanie przyspieszeń mechanizmu płaskiego metodą planu przyspieszeń (metoda wykreślna) Dane: geometria mechanizmu (wymiary elementów, ich położenie i orientacja) oraz stała prędkość
ANALIZA MATEMATYCZNA 2 zadania z odpowiedziami
 ANALIZA MATEMATYCZNA zadania z odpowiedziami Maciej Burnecki strona główna Spis treści Całki niewłaściwe pierwszego rodzaju Całki niewłaściwe drugiego rodzaju Szeregi liczbowe 4 4 Szeregi potęgowe 5 5
ANALIZA MATEMATYCZNA zadania z odpowiedziami Maciej Burnecki strona główna Spis treści Całki niewłaściwe pierwszego rodzaju Całki niewłaściwe drugiego rodzaju Szeregi liczbowe 4 4 Szeregi potęgowe 5 5
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
"Bieda przeczy matematyce; gdy się ją podzieli na więcej ludzi, nie staje się mniejsza." Gabriel Laub
 "Bieda przeczy matematyce; gdy się ją podzieli na więcej ludzi, nie staje się mniejsza." Gabriel Laub Def. Macierzą odwrotną do macierzy A M(n) i deta nazywamy macierz A - M(n) taką, że A A - A - A Tw.
"Bieda przeczy matematyce; gdy się ją podzieli na więcej ludzi, nie staje się mniejsza." Gabriel Laub Def. Macierzą odwrotną do macierzy A M(n) i deta nazywamy macierz A - M(n) taką, że A A - A - A Tw.
W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora.
 1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
22. CAŁKA KRZYWOLINIOWA SKIEROWANA
 CAŁA RZYWOLINIOWA SIEROWANA Niech łuk o równaniach parametrycznych: x x(t), y y(t), a < t < b, będzie łukiem regularnym skierowanym, tzn łukiem w którym przyjęto punkt A(x(a), y(a)) za początek łuku, zaś
CAŁA RZYWOLINIOWA SIEROWANA Niech łuk o równaniach parametrycznych: x x(t), y y(t), a < t < b, będzie łukiem regularnym skierowanym, tzn łukiem w którym przyjęto punkt A(x(a), y(a)) za początek łuku, zaś
Funkcją sinus kąta α nazywamy stosunek przyprostokątnej leżącej naprzeciw kąta α do przeciwprostokątnej w trójkącie prostokątnym, i opisujemy jako:
 1. Trygonometria 1.1Wprowadzenie Jednym z podstawowych działów matematyki który wykorzystywany jest w rozwiązywaniu problemów technicznych jest trygonometria. W szkole średniej wprowadzone zostały podstawowe
1. Trygonometria 1.1Wprowadzenie Jednym z podstawowych działów matematyki który wykorzystywany jest w rozwiązywaniu problemów technicznych jest trygonometria. W szkole średniej wprowadzone zostały podstawowe
1 Przestrzeń liniowa. α 1 x α k x k = 0
 Z43: Algebra liniowa Zagadnienie: przekształcenie liniowe, macierze, wyznaczniki Zadanie: przekształcenie liniowe, jądro i obraz, interpretacja geometryczna. Przestrzeń liniowa Już w starożytności człowiek
Z43: Algebra liniowa Zagadnienie: przekształcenie liniowe, macierze, wyznaczniki Zadanie: przekształcenie liniowe, jądro i obraz, interpretacja geometryczna. Przestrzeń liniowa Już w starożytności człowiek
1 Funkcje dwóch zmiennych podstawowe pojęcia
 1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
ELEKTROTECHNIKA Semestr 1 Rok akad / ZADANIA Z MATEMATYKI Zestaw Przedstaw w postaci algebraicznej liczby zespolone: (3 + 2j)(5 2j),
(5 2j),") ELEKTROTECHNIKA Semestr Rok akad. / 5 ZADANIA Z MATEMATYKI Zestaw. Przedstaw w postaci algebraicznej liczby zespolone: (3 + j)(5 j) 3 j +j (5 + j) (3 + j) 3. Narysuj zbiory punktów na płaszczyźnie: +j
ELEKTROTECHNIKA Semestr Rok akad. / 5 ZADANIA Z MATEMATYKI Zestaw. Przedstaw w postaci algebraicznej liczby zespolone: (3 + j)(5 j) 3 j +j (5 + j) (3 + j) 3. Narysuj zbiory punktów na płaszczyźnie: +j
Wektor położenia. Zajęcia uzupełniające. Mgr Kamila Rudź, Podstawy Fizyki. http://kepler.am.gdynia.pl/~karudz
 Kartezjański układ współrzędnych: Wersory osi: e x x i e y y j e z z k r - wektor o współrzędnych [ x 0, y 0, z 0 ] Wektor położenia: r t =[ x t, y t,z t ] każda współrzędna zmienia się w czasie. r t =
Kartezjański układ współrzędnych: Wersory osi: e x x i e y y j e z z k r - wektor o współrzędnych [ x 0, y 0, z 0 ] Wektor położenia: r t =[ x t, y t,z t ] każda współrzędna zmienia się w czasie. r t =
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ. 1. Ciała
 ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ WSHE, O/K-CE 1. Ciała Definicja 1. Układ { ; 0, 1; +, } złożony ze zbioru, dwóch wyróżnionych elementów 0, 1 oraz dwóch działań +:, : nazywamy ciałem
ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ WSHE, O/K-CE 1. Ciała Definicja 1. Układ { ; 0, 1; +, } złożony ze zbioru, dwóch wyróżnionych elementów 0, 1 oraz dwóch działań +:, : nazywamy ciałem
WYK LAD 5: GEOMETRIA ANALITYCZNA W R 3, PROSTA I P LASZCZYZNA W PRZESTRZENI R 3
 WYK LAD 5: GEOMETRIA ANALITYCZNA W R 3, PROSTA I P LASZCZYZNA W PRZESTRZENI R 3 Definicja 1 Przestrzenia R 3 nazywamy zbiór uporzadkowanych trójek (x, y, z), czyli R 3 = {(x, y, z) : x, y, z R} Przestrzeń
WYK LAD 5: GEOMETRIA ANALITYCZNA W R 3, PROSTA I P LASZCZYZNA W PRZESTRZENI R 3 Definicja 1 Przestrzenia R 3 nazywamy zbiór uporzadkowanych trójek (x, y, z), czyli R 3 = {(x, y, z) : x, y, z R} Przestrzeń
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Wstęp. Ruch po okręgu w kartezjańskim układzie współrzędnych
 Wstęp Ruch po okręgu jest najprostszym przypadkiem płaskich ruchów krzywoliniowych. W ogólnym przypadku ruch po okręgu opisujemy równaniami: gdzie: dowolna funkcja czasu. Ruch odbywa się po okręgu o środku
Wstęp Ruch po okręgu jest najprostszym przypadkiem płaskich ruchów krzywoliniowych. W ogólnym przypadku ruch po okręgu opisujemy równaniami: gdzie: dowolna funkcja czasu. Ruch odbywa się po okręgu o środku
TRYGONOMETRIA. 1. Definicje i własności funkcji trygonometrycznych
 TRYGONOMETRIA. Definicje i własności funkcji trygonometrycznych Funkcje trygonometryczne kąta ostrego można zdefiniować przy użyciu trójkąta prostokątnego: c a α b DEFINICJA. Sinusem kąta ostrego α w trójkącie
TRYGONOMETRIA. Definicje i własności funkcji trygonometrycznych Funkcje trygonometryczne kąta ostrego można zdefiniować przy użyciu trójkąta prostokątnego: c a α b DEFINICJA. Sinusem kąta ostrego α w trójkącie
ALGORYTM STATYCZNEJ ANALIZY MES DLA KRATOWNICY
 ALGORYTM STATYCZNEJ ANALIZY MES DLA RATOWNICY Piotr Pluciński e-mail: p.plucinski@l5.pk.edu.pl Jerzy Pamin e-mail: jpamin@l5.pk.edu.pl Instytut Technologii Informatycznych w Inżynierii Lądowej Wydział
ALGORYTM STATYCZNEJ ANALIZY MES DLA RATOWNICY Piotr Pluciński e-mail: p.plucinski@l5.pk.edu.pl Jerzy Pamin e-mail: jpamin@l5.pk.edu.pl Instytut Technologii Informatycznych w Inżynierii Lądowej Wydział
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
Analiza Matematyczna F1 dla Fizyków na WPPT Lista zadań 4, 2018/19z (zadania na ćwiczenia)
") Analiza Matematyczna F1 dla Fizyków na WPPT Lista zadań 4, 2018/19z (zadania na ćwiczenia) (Na podstawie podręcznika M. Gewert, Z. Skoczylas, Analiza Matematyczna 1. Przykłady i zadania, GiS 2008) 4 Pochodne
Analiza Matematyczna F1 dla Fizyków na WPPT Lista zadań 4, 2018/19z (zadania na ćwiczenia) (Na podstawie podręcznika M. Gewert, Z. Skoczylas, Analiza Matematyczna 1. Przykłady i zadania, GiS 2008) 4 Pochodne
FUNKCJE LICZBOWE. Na zbiorze X określona jest funkcja f : X Y gdy dowolnemu punktowi x X przyporządkowany jest punkt f(x) Y.
 Y.") FUNKCJE LICZBOWE Na zbiorze X określona jest funkcja f : X Y gdy dowolnemu punktowi x X przyporządkowany jest punkt f(x) Y. Innymi słowy f X Y = {(x, y) : x X oraz y Y }, o ile (x, y) f oraz (x, z) f pociąga
FUNKCJE LICZBOWE Na zbiorze X określona jest funkcja f : X Y gdy dowolnemu punktowi x X przyporządkowany jest punkt f(x) Y. Innymi słowy f X Y = {(x, y) : x X oraz y Y }, o ile (x, y) f oraz (x, z) f pociąga
21 Symetrie Grupy symetrii Grupa translacji
 21 Symetrie 21.1 Grupy symetrii Spróbujmy odpowiedzieć sobie na pytanie, jak zmienia się stan układu kwantowego pod wpływem transformacji układu współrzędnych. Najprostszą taką transformacją jest np. przesunięcie
21 Symetrie 21.1 Grupy symetrii Spróbujmy odpowiedzieć sobie na pytanie, jak zmienia się stan układu kwantowego pod wpływem transformacji układu współrzędnych. Najprostszą taką transformacją jest np. przesunięcie
Kinematyka manipulatorów robotów
 Wstęp do Robotyki c W. Szynkiewicz, 29 1 Podstawowe pojęcia: Kinematyka manipulatorów robotów Ogniwo(człon, ramię) bryła sztywna(zbiór punktów materialnych, których wzajemne położenie jest stałe). Przegub(złącze)
Wstęp do Robotyki c W. Szynkiewicz, 29 1 Podstawowe pojęcia: Kinematyka manipulatorów robotów Ogniwo(człon, ramię) bryła sztywna(zbiór punktów materialnych, których wzajemne położenie jest stałe). Przegub(złącze)
w najprostszych przypadkach, np. dla trójkątów równobocznych
 MATEMATYKA - klasa 3 gimnazjum kryteria ocen według treści nauczania (Przyjmuje się, że jednym z warunków koniecznych uzyskania danej oceny jest spełnienie wszystkich wymagań na oceny niższe.) Dział programu
MATEMATYKA - klasa 3 gimnazjum kryteria ocen według treści nauczania (Przyjmuje się, że jednym z warunków koniecznych uzyskania danej oceny jest spełnienie wszystkich wymagań na oceny niższe.) Dział programu
Fizyka 1(mechanika) AF14. Wykład 5
 AF14. Wykład 5") Fizyka 1(mechanika) 1100-1AF14 Wykład 5 Jerzy Łusakowski 30.10.2017 Plan wykładu Ziemia jako układ nieinercjalny Fizyka 1(mechanika) 1100-1AF14 Wykład 5 Dwaj obserwatorzy- związek między mierzonymi współrzędnymi
Fizyka 1(mechanika) 1100-1AF14 Wykład 5 Jerzy Łusakowski 30.10.2017 Plan wykładu Ziemia jako układ nieinercjalny Fizyka 1(mechanika) 1100-1AF14 Wykład 5 Dwaj obserwatorzy- związek między mierzonymi współrzędnymi
2.9. Kinematyka typowych struktur manipulatorów
 Politechnika Poznańska, Katedra Sterowania i Inżynierii Systemów str. 1 2.9. Kinematyka typowych struktur manipulatorów 2.9.1. Manipulator planarny 3DOF Notacja DH Rys. 28 Tablica 1 Parametry DH Nr ogniwa
Politechnika Poznańska, Katedra Sterowania i Inżynierii Systemów str. 1 2.9. Kinematyka typowych struktur manipulatorów 2.9.1. Manipulator planarny 3DOF Notacja DH Rys. 28 Tablica 1 Parametry DH Nr ogniwa
Ruch drgający. Ruch harmoniczny prosty, tłumiony i wymuszony
 Ruch drgający Ruch harmoniczny prosty, tłumiony i wymuszony Ruchem drgającym nazywamy ruch ciała zachodzący wokół stałego położenia równowagi. Ruchy drgające dzielimy na ruchy: okresowe, nieokresowe. Ruch
Ruch drgający Ruch harmoniczny prosty, tłumiony i wymuszony Ruchem drgającym nazywamy ruch ciała zachodzący wokół stałego położenia równowagi. Ruchy drgające dzielimy na ruchy: okresowe, nieokresowe. Ruch
1. PODSTAWY TEORETYCZNE
 1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie W pierwszym wykładzie przypomnimy podstawowe działania na macierzach. Niektóre z nich zostały opisane bardziej szczegółowo w innych
1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie W pierwszym wykładzie przypomnimy podstawowe działania na macierzach. Niektóre z nich zostały opisane bardziej szczegółowo w innych
WBiA Architektura i Urbanistyka. 1. Wykonaj dziaªania na macierzach: Które z iloczynów: A 2 B, AB 2, BA 2, B 2 3, B = 1 2 0
 WBiA Architektura i Urbanistyka Matematyka wiczenia 1. Wykonaj dziaªania na macierzach: 1) 2A + C 2) A C T ) B A 4) B C T 5) A 2 B T 1 0 2 dla A = 1 2 1 1 0 B = ( 1 2 1 0 1 ) C = 1 2 1 0 2 1 0 1 2. Które
WBiA Architektura i Urbanistyka Matematyka wiczenia 1. Wykonaj dziaªania na macierzach: 1) 2A + C 2) A C T ) B A 4) B C T 5) A 2 B T 1 0 2 dla A = 1 2 1 1 0 B = ( 1 2 1 0 1 ) C = 1 2 1 0 2 1 0 1 2. Które
Przekształcenia liniowe
 ALGEBRA LINIOWA 2 Wydział Mechaniczny / AIR, MTR Semestr letni 2009/2010 Prowadzący: dr Teresa Jurlewicz Przekształcenia liniowe Uwaga. W nawiasach kwadratowych podane są numery zadań znajdujących się
ALGEBRA LINIOWA 2 Wydział Mechaniczny / AIR, MTR Semestr letni 2009/2010 Prowadzący: dr Teresa Jurlewicz Przekształcenia liniowe Uwaga. W nawiasach kwadratowych podane są numery zadań znajdujących się
Indukcja matematyczna
 Indukcja matematyczna Zadanie. Zapisać, używając symboli i, następujące wyrażenia (a) n!; (b) sin() + sin() sin() +... + sin() sin()... sin(n); (c) ( + )( + /)( + / + /)... ( + / + / +... + /R). Zadanie.
Indukcja matematyczna Zadanie. Zapisać, używając symboli i, następujące wyrażenia (a) n!; (b) sin() + sin() sin() +... + sin() sin()... sin(n); (c) ( + )( + /)( + / + /)... ( + / + / +... + /R). Zadanie.
Z ostatniego wzoru i zależności (3.20) można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne
 można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne") 46 III. Przekształcenia w przestrzeni trójwymiarowej Z ostatniego wzoru i zależności (3.20) można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne Złożone obiekty trójwymiarowe można uważać,
46 III. Przekształcenia w przestrzeni trójwymiarowej Z ostatniego wzoru i zależności (3.20) można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne Złożone obiekty trójwymiarowe można uważać,
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Matematyka liczby zespolone. Wykład 1
 Matematyka liczby zespolone Wykład 1 Siedlce 5.10.015 Liczby rzeczywiste Zbiór N ={0,1,,3,4,5, } nazywamy zbiorem Liczb naturalnych, a zbiór N + ={1,,3,4, } nazywamy zbiorem liczb naturalnych dodatnich.
Matematyka liczby zespolone Wykład 1 Siedlce 5.10.015 Liczby rzeczywiste Zbiór N ={0,1,,3,4,5, } nazywamy zbiorem Liczb naturalnych, a zbiór N + ={1,,3,4, } nazywamy zbiorem liczb naturalnych dodatnich.
PODSTAWY ROBOTYKI. Opracował: dr hab. inż. Adam Rogowski
 PODSTAWY ROBOTYKI Opracował: dr hab. inż. Adam Rogowski Autor wykładu: dr hab. inż. Adam Rogowski pok. ST 405 adam.rogowski@pw.edu.pl Literatura: - Treść niniejszego wykładu dostępna na www.cim.pw.edu.pl/lzp
PODSTAWY ROBOTYKI Opracował: dr hab. inż. Adam Rogowski Autor wykładu: dr hab. inż. Adam Rogowski pok. ST 405 adam.rogowski@pw.edu.pl Literatura: - Treść niniejszego wykładu dostępna na www.cim.pw.edu.pl/lzp