Wst p do graki komputerowej i geometrii obliczeniowej. Jakub Maksymiuk
|
|
|
- Zdzisław Czyż
- 7 lat temu
- Przeglądów:
Transkrypt
1 Wst p do graki komputerowej i geometrii obliczeniowej Jakub Maksymiuk
2 Przeksztaªcenia geometryczne w 2D 1 Przeksztaªcenia geometryczne Przeksztaªcenia na pªaszczy¹nie Translacje Skalowanie wzgl dem (0, 0) Odbicie wzgl dem osi Obrót wzgl dem (0, 0) Pochylenie osiowe Zªo»enia przeksztaªce«zªo»enia przeksztaªce«rzut oka na zastosowania
3 Przeksztaªcenia geometryczne Przeksztaªcenia na pªaszczy¹nie Przeksztaªceniem (anicznym) pªaszczyzny nazywamy funkcj L: R 2 R 2 postaci L(x, y) = (ax + by + c, dx + ey + f), gdzie a, b, c, d, e, f R. W postaci macierzowej [ ] [ ] a b e L = + c d f
4 Przeksztaªcenia geometryczne Przeksztaªcenia na pªaszczy¹nie Translacje Translacj o wektor (h, k) oznaczamy T(h, k). T(h, k)(x, y) = (x + h, y + k). W postaci macierzowej translacja zapisuje si jako [ ] h T(h, k) = Id + k Przeksztaªcenie odwrotne T(h, k) jest tak»e translacj, wzór: T(h, k) 1 = T( h, k)
5
6 Przeksztaªcenia geometryczne Przeksztaªcenia na pªaszczy¹nie Skalowanie wzgl dem (0, 0) Skalowanie w wspóªczynnikach (s x, s y ) oznaczamy S(s x, s y ). S(s x, s y )(x, y) = (s x x, s y y). W postaci macierzowej skalowanie zapisuje si jako [ ] sx 0 S(s x, s y ) = 0 s y Je»eli s > 1 skalowanie powi ksza obraz, je»eli s < 1 pomniejsza. Je»eli s x = s y to skalowanie jest proporcjonalne. Odwzorowanie odwrotne do skalowania jest skalowaniem, wzór: S(s x, s y ) 1 = S(1/s x, 1/s y ) Skalowanie wzgl dem innych punktów omówimy pó¹niej.
7
8
9
10 Przeksztaªcenia geometryczne Przeksztaªcenia na pªaszczy¹nie Odbicie wzgl dem osi Odbicie wzgl dem osi x i y oznaczamy R x i R y R x (x, y) = (x, y) R y (x, y) = ( x, y) W postaci macierzowej odbicia zapisuj si jako [ ] [ ] R x = R 0 1 y = 0 1 Odbicie wzgl dem innych osi omówimy pó¹niej.
11
12 Przeksztaªcenia geometryczne Przeksztaªcenia na pªaszczy¹nie Obrót wzgl dem (0, 0) Obrót wzgl dem punktu (0, 0) o k t θ oznaczamy Rot(θ) Rot(θ)(x, y) = (x cos θ y sin θ, x sin θ + y cos θ) W postaci macierzowej obrót zapisuje si jako [ ] cos θ sin θ Rot(θ) = sin θ cos θ Obroty wzgl dem innych punktów omówimy pó¹niej.
13
14
15 Przeksztaªcenia geometryczne Przeksztaªcenia na pªaszczy¹nie Pochylenie osiowe pochylenie w kierunku wektora v o wspóªczynniku r oznaczamy Sh(v, r) Sh(v, r)(x, y) = (x + r(v 1 y v 2 x)v 1, y + r(v 1 y + rv 2 x)v 2 ) gdzie d = dist((x, y), O). W postaci macierzowej pochylenie zapisuje si jako [ 1 rv1 v Sh(v, r) = 2 rv2 2 ] rv rv 1 v 2
16
17 Przeksztaªcenia geometryczne Przeksztaªcenia na pªaszczy¹nie Zªo»enia przeksztaªce«w grace komputerowej u»ywa sie zwrotu concatenation. Konkatenacj dwóch i wi cej przeksztaªce«mo»emy wyznaczy korzystaj c z wªasno±ci dziaªa«na macierzach P P [ ] P cos θ sin θ = Rot(θ)P = P sin θ cos θ [ ] [ ] P = R x P 1 0 cos θ sin θ = R x Rot(θ)P = P 0 1 sin θ cos θ P Rot(θ) R x
18 Przeksztaªcenia geometryczne Przeksztaªcenia na pªaszczy¹nie Zªo»enia przeksztaªce«problem pojawia si je»eli chcemy u»y translacji, gdy» wtedy konkatenacja nie jest tylko mno»eniem macierzy P Rot(θ) P T(h,k) P R x P [ ] P cos θ sin θ = Rot(θ)P = P sin θ cos θ [ ] P = T(h, k)p cos θ sin θ = T(h, k)rot(θ)p = P + sin θ cos θ [ ] ([ ] [ ]) P = R x P 1 0 cos θ sin θ h = P sin θ cos θ k [ ] h k
19 Rzut oka na zastosowania Przeksztaªcenia geometryczne Rzut oka na zastosowania
20 Wspóªrz dne jednorodne w 2D 2 Wspóªrz dne jednorodne na pªaszczy¹nie Wspóªrz dne jednorodne. Pªaszczyzna rzutowa Punkt w niesko«czono±ci Przeksztaªcenia we wspóªrz dnych jednorodnych
21 Wspóªrz dne jednorodne na pªaszczy¹nie Wspóªrz dne jednorodne. Pªaszczyzna rzutowa W zbiorze X = R 3 \ {0, 0, 0} wprowadzamy relacj równowa»no±ci (x 0, y 0, w 0 ) (x 1, y 1, w 1 ) r 0 (x 0, y 0, w 0 ) = r(x 1, y 1, w 1 ) Klasy abstrakcji tej relacji [(x, y, w)] = {r(x, y, w): r R \ {0}} nazywamy wspóªrz dnymi jednorodnymi (lub rzutowymi). Zbiór X/ nazywamy pªaszczyzn rzutow P 2. Klasa [(x, y, w)] - punkt na pªaszczy¹nie rzutowej.
22 Wspóªrz dne jednorodne na pªaszczy¹nie Wspóªrz dne jednorodne. Pªaszczyzna rzutowa Punkt (x, y) zapisany we wspóªrz dnych kartezja«skich b dziemy reprezentowa we wspóªrz dnych jako (x, y, 1) (albo (rx, ry, r), r 0). Ka»dy punkt (X, Y, W ), W 0 mo»emy przedstawi w postaci (x, y, 1), x = X/W, y = Y/W Mamy zatem odpowiednio± : (x, y) R (X, Y, W ) P 2, W 0
23 Wspóªrz dne jednorodne na pªaszczy¹nie Punkt w niesko«czono±ci (x, y, 0) - punkt w niesko«czono±ci w kierunku wektora (x, y) We¹my prost w kierunku wektora (x 0, y 0 ) (x(t), y(t)) = (tx 0 + a, ty 0 + b) we wspóªrz dnych jednorodnych ma ona równanie (tx + a, ty + b, 1) (x + a/t, ty + b/t, 1/t) Przechodz c z t otrzymujemy punkt (x, y, 0).
24 Wspóªrz dne jednorodne na pªaszczy¹nie Punkt w niesko«czono±ci Dwie proste równolegªe przecinaj si w niesko«czono±ci: x + 2y = 1 x + 2y = 2 we wspóªrz dnych jednorodnych otrzymujemy X + 2Y = W X + 2Y = 2W Rozwi zuj c ukªad równa«dostajemy ( 2r, r, 0) ( 2, 1, 0).
25 Wspóªrz dne jednorodne na pªaszczy¹nie Przeksztaªcenia we wspóªrz dnych jednorodnych Przeksztaªceniem (rzutowym) pªaszczyzny nazywamy funkcj L: P 2 P 2 postaci L(x, y, w) = (ax + by + cw, dx + ey + fw, gx + hy + kw), gdzie a, b, c, d, e, f, g, h, k R. W postaci macierzowej a b c L = d e f g h k Gdy g = h = 0, k 0, to L nazywamy przeksztaªceniem anicznym(!).
26 Wspóªrz dne jednorodne na pªaszczy¹nie Przeksztaªcenia we wspóªrz dnych jednorodnych Translacja: 1 0 h T(h, k) = 0 1 k T(h, k)(x, y) = (x + h, y + k, 1) Skalowanie: s x 0 0 S(s x, s y ) = 0 s y 0 S(s x, s y )(x, y) = (s x x, s y y, 1) 0 0 1
27 Wspóªrz dne jednorodne na pªaszczy¹nie Przeksztaªcenia we wspóªrz dnych jednorodnych Obrót: cos θ sin θ 0 R(θ) = sin θ cos θ R(h, k)(x, y) = (cos θ x sin θ y, sin θ x + cos θ y, 1)
28 Wspóªrz dne jednorodne na pªaszczy¹nie Przeksztaªcenia we wspóªrz dnych jednorodnych Obrót wokól punktu (x 0, y 0 ): R(x 0, y 0 )(θ) = T( x 0, y 0 )R(θ)T(x 0, y 0 ) = 1 0 x 0 cos θ sin θ x 0 = 0 1 y 0 sin θ cos θ y 0 = x 0 cos θ sin θ x 0 = 0 1 y 0 sin θ cos θ y 0 = cos θ sin θ x 0 cos θ x 0 + sin θ y 0 = sin θ cos θ y 0 sin θ x 0 cos θ y
29
30 Wspóªrz dne jednorodne na pªaszczy¹nie Przeksztaªcenia we wspóªrz dnych jednorodnych Zªo»enia prz Odbicie wzgl dem osi ax + by + c = 0 (zaª. b 0): 1 przesun punkt (0, c/b) do ±rodka ukªadu 2 obróci prost o k t θ, gdzie tan θ = a/b (czym jest teraz?) 3 wykona odbicie 4 obróci o k t θ 5 przesun o wektor (0, c/b)
31
32 Wspóªrz dne jednorodne na pªaszczy¹nie Przeksztaªcenia we wspóªrz dnych jednorodnych wiczenia: Sprawdzi poprawno± powy»szych wzorów. Napisa macierz przeprowadzaj c standardowy ukªad wspóªrz dnych w ukªad o ±rodku (x 0, y 0 ) pierwszej osi wyznaczonej przez wektor (v 1, v 2 ) drugiej osi wyznaczonej przez wektor prostopadªy. Wyja±ni co robi macierz s x 0 0 S(s x, s y ; s w ) = 0 s y s w Poda macierze innych przeksztaªce«.
33 Rzut oka na zastosowania. Wspóªrz dne jednorodne na pªaszczy¹nie Przeksztaªcenia we wspóªrz dnych jednorodnych
34 Przeksztaªcenia geometryczne w 3D 3 Przeksztaªcenia w 3D Przeksztaªcenia we wspóªrz dnych jednorodnych Translacja i skalowanie Obroty wokóª osi ukªadu Obrót wokóª dowolnej osi Odbicia wzgl dem pªaszczyzn ukªadu Odbicie wzgl dem dowolnej pªaszczyzny wiczenia
35 Przeksztaªcenia w 3D Przeksztaªcenia we wspóªrz dnych jednorodnych Trójwymiarow przestrze«rzutow P 3 tworzymy analogicznie do P 2 Przeksztaªceniem (rzutowym) pªaszczyzny nazywamy funkcj L: P 3 P 3 postaci m 11 m 12 m 13 m 14 L = m 21 m 22 m 23 m 24 m 31 m 32 m 33 m 34 m 41 m 42 m 43 m 44 gdzie m ij R. Gdy m 41 = m 42 = m 43 = 00, m 44 0, to L nazywamy przeksztaªceniem anicznym(!).
36 Przeksztaªcenia w 3D Translacja i skalowanie Translacja: Skalowanie: h 1 T(h 1, h 2, h 3 ) = h h s x S(s x, s y, s z ) = 0 s y s z
37 Przeksztaªcenia w 3D Obroty wokóª osi ukªadu Obroty: R x (θ) = cos(θ) sin(θ) 0 0 sin(θ) cos(θ) cos(θ) 0 sin(θ) 0 R y (θ) = sin(θ) 0 cos(θ) cos(θ) sin(θ) 0 0 R z (θ) = sin(θ) cos(θ)
38 Przeksztaªcenia w 3D Obrót wokóª dowolnej osi Dana jest prosta l przechodz ca przez punkty P (p 1, p 2, p 3 ) oraz Q(q 1, q 2, q 3 ) oaz k t θ. 1 R = Q P = (r 1, r 2, r 3 ) 2 P T( p 1, p 2, p 3 ) O (co si dzieje z prost l?) 3 Je»eli prosta OR jest osi ukªadu to wykonaj obrót o θ wokóª tej osi i przejd¹ do punktu 5
39 Przeksztaªcenia w 3D Obrót wokóª dowolnej osi 4 Przeciwnym wypadku (zaª. r 2, r 3 0): a) Wykonaj obrót wokóª osi Ox o k t θ x sin θ x = r 2 / r2 2 + r2 3 cos θ x = r 3 / r2 2 + r2 3 pierwotna o± obrotu le»y na pªaszczy¹nie Oxz b) Wykonaj obrót wokóª osi Oy o k t θ y sin θ y = r 1 cos θ r2 2 + r2 3 pierwotna o± obrotu jest teraz osi Oz c) Wykonaj obrót o θ wokóª osi Oz d) Wykonaj operacje odwrotn do puntu b) a potem odwrotn do punktu a). 5 Wykonaj translacj odwrotn do T( p 1, p 2, p 3 )
40 Przeksztaªcenia w 3D Obrót wokóª dowolnej osi Podsumowuj c: T(p 1, p 2, p 3 )R x (θ x )R y ( θ y )R z (θ)r y (θ y )R x ( θ x )T( p 1, p 2, p 3 )
41 Przeksztaªcenia w 3D Odbicia wzgl dem pªaszczyzn ukªadu Odbicia: R yz = R xz = R xy = ? =
42 Przeksztaªcenia w 3D Odbicie wzgl dem dowolnej pªaszczyzny Algorytm: 1 Sprowad¹ pªaszczyzn symetrii do pªaszczyzny ukªadu. 2 Wykonaj odbicie. 3 Wykonaj przeksztaªcenia odwrotne do punktu 1 (w odwrotnej kolejno±ci)
43 Przeksztaªcenia w 3D wiczenia wiczenia: Sprawdzi poprawno± powy»szych wzorów. Napisa macierz przeprowadzaj c standardowy ukªad wspóªrz dnych w ukªad o ±rodku (x 0, y 0, z 0 ) pierwszej osi wyznaczonej przez wektor (v 1, v 2, v 3 ) pozostaªych osiach wyznaczonych przez wektory prostopadªe zachowa / zmieni orientacje ukªadu Poda macierze innych przeksztaªce«.
44 Rzutowanie 4 Rzutowanie Na pªaszczy¹nie Pespektywiczne Równolegªe W przestrzeni
45 Rzutowanie Na pªaszczy¹nie Pespektywiczne Dane s na pªaszczy¹nie: prosta l : ax + by + c = 0 punkt V = (v x, v y ) punkty P 1,... Zadanie: znale¹ punkty przeci cia prostych P i V z prost l (rzuty)
46 20 10 V l
47 Rzutowanie Na pªaszczy¹nie Macierz rzutowania (we wspóªrz dnych jednorodnych): c bv y bv x cv x M = V T l l, V Id 3 = av y c av x cv y a b av x bv y gdzie V = (v x, v y, 1), l = (a b c)
48 Rzutowanie Na pªaszczy¹nie Równolegªe Je»eli zamiast V = (v x, v y, 1) u»yjemy punktu w niesko«czono±ci V = (v x, v y, 0), to dostaniemy macierz rzutu równolegªego: M = c bv y bv x cv x av y c av x cv y 0 0 c av x bv y
49 20 v x, v y
50 Rzutowanie W przestrzeni Dane s w przestrzeni: pªaszczyzna n : ax + by + cz + d = 0 punkt V = (v x, v y, v z ) punkty P 1,... Zadanie: znale¹ punkty przeci cia prostych P i V z pªaszczyzn n
51 Rzutowanie W przestrzeni d bv y cv z bv x cv x dv x av y d av x cv z cv y dv y av z bv z d av x bv y dv z a b c av x bv y cv z bv y cv z bv x cv x dv x av y av x cv z cv y dv y av z bv z av x bv y dv z av x bv y cv z
52 Potok przeksztaªce«5 Potok przeksztaªce«device coordinate transform Viewplane coordinate transform Viewing pipeline
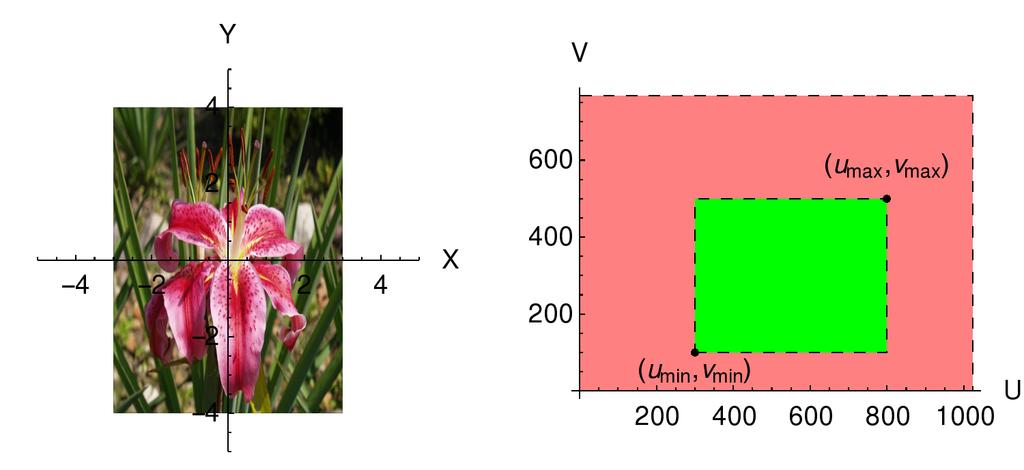
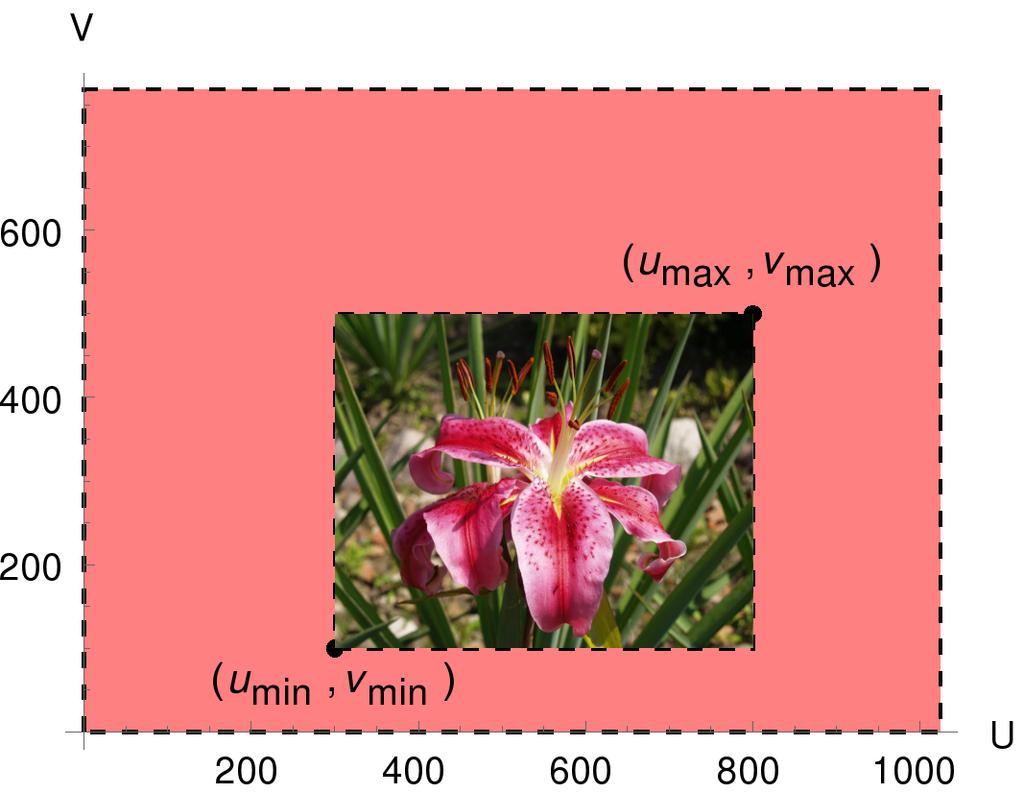
53 Potok przeksztaªce«device coordinate transform Macierz DC Zadaniem tej macierzy jest umieszczenie obiektu w oknie na ekranie. w ukªadzie wspóªrz dnych (x, y) obiekt jest opisany przez prostok t ograniczaj cy o wierzchoªkach (x min, y min ) oraz (x max, y max ). ten prostok t ma zosta umieszczony w oknie w ukªadzie wspóªrz dnych (ekranu) (u, v) obiekt jest opisany przez prostok t ograniczaj cy o wierzchoªkach (u min, v min ) oraz (u max, v max ).
54
55 Potok przeksztaªce«device coordinate transform ( umax u min DC = T(u min, v min )S, v ) max v min T( x min, y min ) x max x min y max y min DC = u max u min x max x min 0 0 v max v min y max y min u min x max u maxx min x max x min v min y max v maxy min y max y min 0 0 1
56
57 Potok przeksztaªce«viewplane coordinate transform Macierz VC Zadaniem tej macierzy jest zamiana wspóªrz dnych 3D na 2D. obiekt (wierzchoªki) zostaª zrzutowany na pªaszczyzn Π opisa ten obiekt w ukªadzie wspóªrz dnych (X, Y ) ukªad wsp. (X, Y ) jest wyznaczony przez ±rodek O = (o 1, o 2, o 3 ), wersor osi X: X = (x 1, x 2, x 3 ), wersor osi Y : Y = (y 1, y 2, y 3 ) Punkty O, X O le» na pªaszczy¹nie Π
58 Potok przeksztaªce«viewplane coordinate transform Wyznaczanie VC Mamy przeksztaªci P Π na P = VCP. Zamiast wyznacza macierz bezpo±rednio szukamy macierzy K takiej,»e KP = P. Uwaga: K VC 1 (wymiary!) Korzystamy z to»samo±ci (A T A) 1 A T A = I. Macierz VC = (K T K) 1 K T jest lewostronnie odwrotna do K.
59 Potok przeksztaªce«viewplane coordinate transform x 1 y 1 o 1 K = x 2 y 2 o 2 x 3 y 3 o o 1 x 1 y 1 x 1 y 1 o 1 o 2 x 2 y 2 o 3 x 3 y 3 = x 2 y 2 o x 3 y 3 o
60 Potok przeksztaªce«viewing pipeline macierz VP Caªo± przeksztaªce«od modelu opisanego w 3D do jego obrazu umiesczonego w oknie urzadzenia opisuje przeksztaªcenie macierzowe (we wspóªrz dnych jednorodnych): VP = DC VC M
61 OBRAZKI Potok przeksztaªce«viewing pipeline
62 Krzywe 6 Krzywe Reprezentacje krzywych Renderowanie krzywej
63 Krzywe Reprezentacje krzywych Posta parametryczna: γ(t) = (x(t), y(t)) lub γ(t) = (x(t), y(t), z(t)) Jedna krzywa ma równe przedstawienia parametryczne, np: γ 1 (t) = (cos(t), sin(t)) γ 2 (t) = (t, 1 t 2 ) γ 3 (t) = ( ) 1 t t 2, 2t 1 + t 2 opisuj okr g (w odpowiedniej dziedzinie)
64 Krzywe Reprezentacje krzywych jawna, nieparametryczna: y = f(x) lub x = g(y) lub z = f(x), y = g(x) uwikªana: F (x, y) = 0 lub F (x, y, z) = 0, G(x, y, z) = 0
65 Krzywe Reprezentacje krzywych Teoretycznie (z tw. o f-cji uwikªanej) wszystkie te postacie s równowa»ne. W praktyce nie. Wzgl dnie ªatwo rysowa krzyw parametryczn, pozostaªe rodzaje s trudne do rysowania. Dla prostych (odcinków), okr gów (ªuków) i elips istniej wydajne algorytmy rysuj ce (z antyaliasingiem!)
66 Krzywe Renderowanie krzywej Stosujemy metod poª cz kropki
67
68 Krzywe Renderowanie krzywej Problem wynika z ró»nej i nie staªej pr dko±ci krzywych. Zawsze istnieje mo»liwo± przeparametryzowania krzywej tak aby miaªa pr dko± jednostkow. Jawne wzory zwykle nie istniej, a numerycznie jest to zªo»one.
69 Krzywe Bezier 7 Krzywe Bezier Denicja Wªasno±ci Algorytm Castelajau Podziaª krzywej Renderowanie krzywej Bezier Morphing Piecewise Bezier Punkt przeci cia
70 Krzywe Bezier Denicja Krzywa Bezier o n + 1 punktach kontrolnych b 0,..., b n R 2 B(t) = n b i B i,n (t), t [0, 1] i=0 gdzie {( n ) B i,n (t) = i (1 t) n i t i 0 i n 0 else Wielok t b 0, b 1,..., b n nazywamy wielok tem kontrolnym (control polygon).
71 Krzywe Bezier Denicja Krzywe niskich stopni liniowa: kwadratowa: 3-go stopnia: B(t) = b 0 (1 t) + b 1 t B(t) = b 0 (1 t) 2 + b 1 2(1 t)t + b 2 t 2 B(t) = b 0 (1 t) 3 + b 1 3(1 t) 2 t + b 2 3(1 t)t 2 + b 3 t 3
72
73 Krzywe Bezier Wªasno±ci B(0) = b 0 oraz B(1) = b n B (0) = n(b 1 b 0 ) oraz B (1) = n(b n b n 1 ) Krzywa Bezier jest zawarta w otoczce wypukªej zbioru punktów kontrolnych. Dla dowolnego przeksztaªcenia anicznego L L(B(t)) = n L(b i )B i,n (t) i=0 Liczba samoprzeci krzywej nie przekracza liczby przeciec krzywej z wielok tem kontrolnym. Je»eli punkty kontrolne le» na prostej, to krzywa te» le»y na prostej. Ka»dy wielomian mo»na przedstawi jako krzyw Bezier
74 Krzywe Bezier Algorytm Castelajau Algorytm Castelajau Dla krzywej B o punktach kontrolnych b 0,..., b n zachodzi j = 1,..., n, i = 0,..., n j B(t) = b n 0 { b 0 i = b i b j i = bj 1 i (1 t) + b j 1 i+1 t
75 Krzywe Bezier Algorytm Castelajau b j i = bj 1 i (1 t) + b j 1 i+1 t b 0 0 b 0 1 b b 0 n 1 b 0 n b 1 0 b 1 1 b b 1 n 1. b n 2 0 b n 2 1 b n 2 2 b n 1 0 b n 1 1 b n 0
76
77 Krzywe Bezier Podziaª krzywej Wybran krzyw Bezier dzielimy na dwie cz ±ci poprzez wybranie warto±ci parametru t = α. Otrzymujemy dwie krzywe lew i praw okre±lone na [0, α] i [α, 0]. S to krzywe Bezier bo s to wielomiany. Jakie s ich punkty kontrolne?
78 Krzywe Bezier Podziaª krzywej Wybran krzyw Bezier dzielimy na dwie cz ±ci poprzez wybranie warto±ci parametru t = α. Otrzymujemy dwie krzywe lew i praw okre±lone na [0, α] i [α, 0]. S to krzywe Bezier bo s to wielomiany. Jakie s ich punkty kontrolne? Odpowied¹: lewej b 0 0, b1 0,..., bn 0 prawej b n 0, bn 1 1,..., b 0 n
79
80 Krzywe Bezier Renderowanie krzywej Bezier Aby narysowac krzyw Bezier 1 Podziel j na dwie krzywe w punkcie t = Je»eli lewa jest prawie liniowa, to id¹ do punktu 3, w przeciwnym wypadku idz do 1. Podobnie dla prawej 3 Narysuj control polygon Krzywa jest prawie liniowa je»eli jej control polygon mie±ci si w w skim (ε-szerokim) prostok cie. Oznacza to,»e punkty kontrolne sa prawie wspóªliniowe.
81 Obrazki Krzywe Bezier Morphing
82 Krzywe Bezier Piecewise Bezier Dla krzywych Bezier wysokiego stopnia, jest maª zale»no± pomiedzy ksztaªtem a wielok tem kontrolnym. Dlatego wprowadza si krzyw kawaªkami Bezier na odcinku [a, b], a = t 0 < t 1 < < t K = b B k (t) = n t t k b i B i,n ( ), t [t k, t k+1 ] t k+1 t k i=0
83
84 Krzywe Bezier Punkt przeci cia Przeci cie z prost 1 Sprawd¹ czy prosta przecina otoczk wypukªa punktów kontrolnych. Je»eli tak idz do 2., w przeciwnym wypadku brak przeci cia. 2 Sprawd¹ czy krzywa jest prawie liniowa. Je»eli tak to idz do 3., w przeciwnym wypadku podziel krzyw na póª i zastosuj 1. do ka»dego kawaªka. 3 Skoro jest prawie liniowa, przybli» j odcinkiem i znajd¹ punkt przeci cia tego odcinka z prost.
85 Krzywe Bezier Punkt przeci cia Aby sprawdzi czy prosta ax + by + c przecina otoczk wypukª punktów (x i, y i ) wystarczy sprawdzi czy wyra»enie ax i + by i + c ma staªy znak. Je»eli nie, to prosta przecina otoczk wypukª.
86 Krzywe Bezier Punkt przeci cia Przeci cie dwóch krzywych 1 Sprawd¹ czy otoczki wypukªe punktów kontrolnych przecinaj si. Je»eli tak idz do 2., w przeciwnym wypadku brak przeci cia. 2 Sprawd¹ czy krzywe s prawie liniowe. Je»eli tak to idz do 3., w przeciwnym wypadku podziel ka»d krzyw na póª i zastosuj 1. do ka»dej pary kawaªków. 3 Skoro krzywe s prawie liniowe, to przybli» je odcinkami i znajd¹ ich punkty przeci cia.
87 Krzywe Bezier Punkt przeci cia O czym jeszcze mo»na powiedzie? Krzywe przestrzenne. Konwersja wielomian <> krzywa Bezier. Krzywe zamkni te. Jak uzyska okr g, elips i hiperbol. Reprezentacja krzywych Bezier we wspóªrz dnych jednorodnych. Dla matematyków: wªasno±ci analityczne. Zastosowanie w interpolacji.
88 8 B-spline Denicja Wªasno±ci NURBS'y B-splines
89 B-spline Denicja Ustalamy 1 stopie«d >= 0 2 wektor w zªów t 0... t d = a t m d = b t m 3 punkty kontrolne b 0,..., b n Deniujemy B-spline stopnia d o punktach kontrolnych b i i w zªach t i okre±lony na [a, b] B(t) = n b i N i,d (t) i=0
90 B-spline Denicja Baza bisplajnów stopnia d zdeniowan przez w zªy t d t m d N i,d (t) = { 1 t [t i, t i+1 ] N i,0 (t) = 0 otherwise t t i t i+d ti N i,d 1(t) + t i+d+1 t t i+d+1 ti + 1 N i,d 1(t)
91 {0, 0, 1, 2, 4, 5, 7, 7, 8, 10 } {1, 1, 2, 4, 4, 5, 6, 8, 9, 9} {1, 3, 3, 3, 4, 4, 7, 7, 8, 10 } {1, 2, 3, 4, 5, 5, 7, 8, 9, 10 } {1, 1, 2, 5, 6, 6, 7, 8, 9, 9} {0, 0, 0, 0, 1, 1, 6, 8, 8, 9} {2, 3, 3, 3, 6, 6, 7, 8, 9, 10 } {1, 2, 2, 5, 6, 7, 9, 10, 10, 10 } {0, 2, 3, 3, 4, 5, 6, 7, 8, 9}
92 B-spline Wªasno±ci 1 Wªasno± otoczki wypukªej 2 Niezmieniczo± wzgl dem przeksztaªce«anicznych 3 Gªadko± : równa stopniowi w zªa 4 Lokalno± : Je»eli t [t r, t r+1 ], to B(t) = d i=r d b i N i,d (t) 5 Nie interpoluje punktów b 0 i b n, ale mo»liwa jest modykacja 6 Do rysowania sªu»y algorytm de Boor'a, podobny do algorytmu Casteljau
93 B-spline NURBS'y NURBS = Non-uniform rational B-spline Dodatkowo mamy wektor wag w = (w 0,..., w n ) B(t) = n i=0 w i b i N i,d (t) n i=0 w i N i,d (t) = n i=0 b i w i N i,d (t) wi N i,d (t)
94 wi ksza waga punktu = punkt mocniej przyci ga krzyw
95 Powierzchnie 9 Powierzchnie Reprezentacje powierzchni Renderowanie powierzchni Powierzchnie Bezier i B-splain Ró»ne konstrukcje
96 Powierzchnie Reprezentacje powierzchni Posta uwikªana: {(x, y, z) R 3 : F (x, y, z) = 0}, F : R 3 R np.: pªaszczyzna: ax + by + cz + d = 0, sfera: x 2 + y 2 + z 2 1 = 0, torus: (x 2 + y 2 + z 2 + R 2 r 2 ) 2 4R 2 (x 2 + y 2 ) serduszko: (x y2 + z 2 1) 3 x 2 z y2 z 3 = 0
97 Powierzchnie Reprezentacje powierzchni Posta parametryczna: S(s, t) = (x(s, t), y(s, t), z(s, t)), S : R 2 U R 3 np.: pªaszczyzna: S(s, t) = R + sv + tu sfera: S(s, t) = (r cos s sin t, r sin s sin t, r cos t) torus: S(s, t) = ((c + a cos v) cos u, (c + a cos v) sin u, a sin v) powierzchnia obrotowa: S(s, t) = (t cos s, t sin s, f(t))
98 Powierzchnie Renderowanie powierzchni Podstawowa metoda: narysowa kropki i poª czy je w trójk ty/kwadraty.
99
100 Powierzchnie Powierzchnie Bezier i B-splain Bezier S(s, t) = B-splain n i m p i,j B i,n (s)b j,m (t), (s, t) [0, 1] [0, 1] j S(s, t) = NURBS n i m p i,j N i,e (s)n j,d (t), (s, t) [s d, s d ] [t e, t e] j S(s, t) = n m i j n m i j w i,jp i,j N i,e (s)n j,d (t) w, (s, t) [s d, s d i,jn i,e (s)n j,d (t) ] [t e, t e]
101
102 Powierzchnie Powierzchnie Bezier i B-splain Wªasno±ci powierzchni sa analogiczne do wªasno±ci krzywych: interpolacja w zªów ko«cowych dla Bezier lokalno± na B-spline niezmienniczo± wzgl dem przeksztaªce«anicznych algorytmy
103 OBRAZKI Powierzchnie Ró»ne konstrukcje
104 Rendering 10 Rendering Kolor O±wietlenie Model o±wietlenia Shading Shadow Podsumowanie
105 Rendering Kolor Barwa to kombinacja efektów zycznych, dªugo±c fali promieniowania elektromagnetycznego zjologicznych, budowa oka (lub analogicznego organu) psychicznych, wra»enie wywoªywane w mózgu podczas percepcji tej fali Odczucie to jest indywidualne, zale»ne od cech osobniczych i wielu innych czynników.

106 Rendering Kolor Barwy podstawowe w malarstwie: RedYellowBlue ródªo: wikipedia.pl

: RedGreenBlue")
107 Rendering Kolor Barwy podstawowe w grace komputerowej (technice cyfrowej): RedGreenBlue ródªo: wikipedia.pl

Black ródªo:")
108 Rendering Kolor Barwy podstawowe w poligrai: CyanMagentaYellow (K)Black ródªo: wikipedia.pl
109 Rendering Kolor Problemem i przedmiotem intensywnych bada«byªo odwzorowania kolorów pomi dzy obrazami widzianymi na»ywo wydrukowanymi wy±wietlanymi na ekranie stworzonymi w komputerze itd. Obejmuje to zagadnienia z zyki, zjologii, chemii, elektrotechniki...
110 Rendering Kolor Dla przykªadu (np.: JPEG, MPEG, ComponentVideo): Oko ludzkie jest mniej wra»liwe na kolor ni» na jasno±. Dlatego w transmisji/kompresji obrazów nie przechowuje si informacji o kolorach (RGB). Przechowuje si informacj o luminacji Y ( jasno±ci) oraz skªadowych (chrominancji) C B = Y B, C R = Y R Skªadowe C B, C R próbkuje si z mniejsz rozdzielczo±ci ni» Y, co pozwala na oszcz dno± pasma transmisji (ilo±c danych). Jest to kompresja stratna.
111 Rendering Kolor Trzeba mie na uwadze,»e kolorów z komputera nie da si odwzorowa na kolory na papierze. Opracowywane s ró»ne palety kolorów Adobe, PANTONE. Standardy ISO, opisujace warunki zyczne w których mo»na porównywa kolory. Problem jest zuwa»alny w przypadku DTP, w przypadku fotograi cyfrowej mniej (poniewa» jest powszechna)
112 Rendering Kolor Poj cia z którymi wypadaªoby si zapozna barwa podstawowa/czysta barwa pochodna odcie«nasycenie koªo barw przestrze«barw model kolorów
113 Rendering Kolor Model kolorów: RGB, HueSaturationValue, CMYK > patrz dowolny program graczny, np.: GIMP
114 Rendering O±wietlenie Problem o±wietlenia w grace komputerowej: W realistyczny sposób odda efekt o±wietlenia obiektu/sceny przez ¹ródªa ±witªa.
115 Rendering O±wietlenie ródªa ±wiatªa w rzeczywisto±ci bezpo±rednie: sªo«ce,»arówki itd. wtórne: lustra, ±ciany, Tego typu ¹ródªa daj ±wiatªo rozproszone, ±wiatªo jest emitowane przez pewn powierzchnie.
116 Rendering O±wietlenie W grace (lub w szkolnej zyce) traktujemy np.:»arówki, jako punktowe ¹ródªo ±wiatªa. Wtedy promienie ±wiatªa tworz sto»ek o wierzchoªku w ¹ródle. Je»eli ¹ródªo swiatªa jest umieszczone w niesko«czono±ci (w praktyce: daleko) lub jest maªe (relatywnie do sceny) to promienie ±wiatªa traktujemy jako równolegªe. W praktyce: sªo«ce (±wiatªo sªoneczne) Takie ¹ródªo traktujemy jako kierunkowe Innym przykªadem jest reektor (paraboliczny)
117 Rendering O±wietlenie Niektóre zjawiska zyczne uwzgl dniane w grace komputerowej odbicie zaªamanie absorbcja/pochªanianie rozpraszanie W praktyce wszystkie te zjawiska zachodz jednocze±nie, ich wpªyw na o±wietlenie zale»y od wªasno±ci materiaªu z którego jest zbudowany obiekt. Aby odda efekt o±wietlenia nale»y nada obiektowi cechy zyczne.
118 Rendering O±wietlenie Jedno punktowe ¹ródªa ±wiatªa jest nierealistyczne wiatªo przechodz przez powietrze podlega rozproszeniu. Swiatªo odbijaj c si od obiektów tworzy nowe ¹ródªa swiatªa Aby zasymulowa te efekty nale»aªoby prze±ledzi DU O promieni ±wietlnych. Wprowadza sie o±wietlenie tªa (ambient) na które skªadaj si efekty rozpraszania i odbicia
119 OBRAZKI Rendering O±wietlenie
120 Rendering Model o±wietlenia Prawa zyczne: 1 K t padania θ jest równy katowi odbicia. 2 Promie«padaj cy L, odbity R i wektor normalny N le» w tej samej pªaszczy¹nie.

121 Rendering Model o±wietlenia
122 Rendering Model o±wietlenia Diuse (Prawo Lamberta) Intensywno± ±wiatªa w kierunku v jest proporcjonalna do kosinusa k ta pomi dzy wektorami v i normalnym do powierzchni. I D = I d R d (N L) gdzie I d - intensywno± ±wiatªa padaj cego R d - wspóªczynnik odbicia Kolor swiatªa odbitego jest wypadkow koloru ±wiatªa padaj cego i koloru powierzchni. Zachodzi dla matowych materiaªów
123 Rendering Model o±wietlenia Specular Model Phonga (jeden z wielu): I S = I s R s (θ) cos m α = I s R s (θ)(v R) m gdzie R s (θ), m - wspóªczynniki odpowiadaj ce wªasno±ciom zycznym mteriaªu α - k t jaki tworzy promie«swiatªa odbitego R z kierunkiem z którego patrzy obserwator V Kolor ±wiatªa odbitego jest taki sam jak ±wiatªa padaj cego. Zachodzi dla bªyszcz cych materiaªów.
124 Rendering Model o±wietlenia Ambient Odpowiada za sumaryczne ±wiatªo pochodz ce ze sceny (¹ródªa, odbicia). Bardzo trudny do zasymulowania. Model praktyczny: I A = I a R a Kolor ±wiatªa odbitego taki jest wypadkow koloru ±wiatªa padaj cego i koloru obiektu.
125 Rendering Model o±wietlenia Attenuation Obiekty le»ace dalej od ¹ródªa ±wiatªa s gorzej o±wietlone, aby zasymulowa ten efekt dodaje sie wspóªczynnnik att(d) I D = att(d)r d (N L) I S = att(d)r s (N R) m Fizycznie (tªumienie) at(d) = 1/d 2, jednak w praktyce u»ywa si att(d) = 1 ad 2 + bd + c Dobór wspóªczynników zale»y od modelu
126 Rendering Model o±wietlenia Peªny model o±wietlenia I = I a R a + att(d) i (R d (N L i ) + R s (N R i ) m ) gdzie summujemy po wszystkich ¹ródªach ±wiatªa. Kolor W praktyce oblicza sie intensywno± ka»dej skªadowej w uzywanym modelu kolorów np.: I red, I green, I blue.
127 OBRAZKI Rendering Model o±wietlenia
128 Rendering Shading Powy»szy model o±wietlenia powinien by zastosowany do ka»dego piksela. Teoretycznie jest to proste: tylko wyliczy wektor normalny i podstawi do wzoru
129 Rendering Shading Powy»szy model o±wietlenia powinien by zastosowany do ka»dego piksela. Teoretycznie jest to proste: tylko wyliczy wektor normalny i podstawi do wzoru W praktyce jest to niewykonalne w sensowny sposób. Wprowadza si ró»ne uproszczenia w modelu lub w geometrii obiektu
130 Rendering Shading Zaªo»enia: powierzchnia dana parametrycznie S = S(u, v) siatka punktów P i,j = S(u i, v j ) W najprostszych modelach siatka jest jednorodna, w bardziej skomplikowanych uwzgl dnia krzywizn powierzchni. Punkty P i,j tworz ±ciany (facets), zywkle czworok ty lub trójk ty,
131 Rendering Shading Flat shading Ka»dy wielok t jest o±wietlony równomiernie. zalety: wystarczy obliczy oswietlenie jeden raz dla ka»dego wielok ta wady: ±ciany wyra¹nie widoczne, dodanie wiekszej ilosci ±cian redukuje zarówno zalety i wady
132 Rendering Shading Gouraud shading Dla danego tójk ta ABC, wyliczamy o±wietlenie tylko w jego wierzchoªkach i ustalmy pewn prost (kierunek) l Dla punktów P = (1 s)a + sb, Q = (1 t)a + tc: I P = (1 s)i A + si B, I Q = (1 t)a + tc Dla dowolnego punktu L trójkata, prosta równolegªa do l, przechodz ca przez L przecina boki AB i AC w punktach P i Q Wtedy L = (1 u)p + uq oraz I L = (1 u)i P + ui Q
133 Rendering Shading zalety: nadal maªo oblicze«, bardziej realistyczne odwzorowanie wady: nadal widoczne kraw dzie ±cian Algorytm mo»na ulepszy wprowadzaj c u±rednienia warto±ci w wierzchoªkach i na kraw dziach.
134 Rendering Shading Phong shading Zamiast interpolowa intensywno± ±wiatªa, interpoluje sie wektor normalny. Metoda jest taka jak w modelu Gouraud. zalety: bardzo realistyczne efekty wady: wymaga wiekszej ilo±ci oblicze«
135 Rendering Shadow Cie«powstaje jako efekt zablokowania promieni ±wiatªa przez przeszkod. Jest widoczny (!) gdy wpªyw oswietlenia tªa jest mniejszy ni» ¹ródªa (¹ródeª) zasadniczym algorytmem rysowania cienia jest okre±lenie czy dany wielok t rzuca cie«a je»eli tak to gdzie i zastosowanie rzutowania Jest to zagadnienie bardzo zªo»one obliczeniowo.
136 Rendering Podsumowanie Podsumowanie Mimo prostej matematyki, problem o±wietlenia/cieniowania/cienia jest zªo»ony obliczeniowo. Obecnie jest w znacznej cze±ci realizowane przez kart graczn. W programach gracznych, rola uzytkownika/programisty jest najcz sciej ograniczona do okre±lenia parametrów. Dobrze jest jednak rozumie zagadnienie w ogólnym zarysie Podczas r cznego programowania, zwykle korzystamy z wielu udogodnie«odstarczanych przez bibliotek graczn - shadery
137 Rendering Podsumowanie O±wietlenie/cieniowanie/cie«to nic innego ni» odpowiednio obliczony kolor punktu modelu i sceny! Niemniej, ilo± oblicze«oraz ich zªo»ono± zasªuguje na respekt. Obecnie jest to mniej lub bardziej standardowe.
138 Geometria obliczeniowa 11 Geometria Obliczeniowa Co to jest? Motywacja
139 Geometria Obliczeniowa Co to jest? Geometria oblczeniowa zajmuje si projektowaniem analiz aplikacj algorytmów o naturze geometrycznej.
140 Geometria Obliczeniowa Co to jest? Typowe problemy geometryczne: closest pair of points - w zbiorze punktów znale¹ dwa najbli»sze
141 Geometria Obliczeniowa Co to jest? Typowe problemy geometryczne: closest pair of points - w zbiorze punktów znale¹ dwa najbli»sze lines (segments) intersection - w zbiorze prostych (odcinków) znale¹ punkty przeci cia
142 Geometria Obliczeniowa Co to jest? Typowe problemy geometryczne: closest pair of points - w zbiorze punktów znale¹ dwa najbli»sze lines (segments) intersection - w zbiorze prostych (odcinków) znale¹ punkty przeci cia convex hull - wyznaczy otoczk wypukª zbioru punktów
143 Geometria Obliczeniowa Co to jest? Typowe problemy geometryczne: closest pair of points - w zbiorze punktów znale¹ dwa najbli»sze lines (segments) intersection - w zbiorze prostych (odcinków) znale¹ punkty przeci cia convex hull - wyznaczy otoczk wypukª zbioru punktów triangulation, mesh generation - podzieli dany ksztaªt na trójk ty
144 Geometria Obliczeniowa Co to jest? Typowe problemy geometryczne: closest pair of points - w zbiorze punktów znale¹ dwa najbli»sze lines (segments) intersection - w zbiorze prostych (odcinków) znale¹ punkty przeci cia convex hull - wyznaczy otoczk wypukª zbioru punktów triangulation, mesh generation - podzieli dany ksztaªt na trójk ty operations on polygons - sumy, iloczyny, wyci gni cia itd...
145 Geometria Obliczeniowa Co to jest? Typowe problemy typu geometrycznego: range searching - znale¹ punkty nale» ce do dane zbioru
146 Geometria Obliczeniowa Co to jest? Typowe problemy typu geometrycznego: range searching - znale¹ punkty nale» ce do dane zbioru point in polygon - stwierdzi czy punkt nalezy do danego wielok ta
147 Geometria Obliczeniowa Co to jest? Typowe problemy typu geometrycznego: range searching - znale¹ punkty nale» ce do dane zbioru point in polygon - stwierdzi czy punkt nalezy do danego wielok ta point location - stwierdzi w którym elemencie siatki znajduje si dany punkty
148 Geometria Obliczeniowa Co to jest? Typowe problemy typu geometrycznego: range searching - znale¹ punkty nale» ce do dane zbioru point in polygon - stwierdzi czy punkt nalezy do danego wielok ta point location - stwierdzi w którym elemencie siatki znajduje si dany punkty ray tracing - stwierdzi które z obiektów jest przecianne przez prost
149 Geometria Obliczeniowa Co to jest? Typowe problemy typu geometrycznego: range searching - znale¹ punkty nale» ce do dane zbioru point in polygon - stwierdzi czy punkt nalezy do danego wielok ta point location - stwierdzi w którym elemencie siatki znajduje si dany punkty ray tracing - stwierdzi które z obiektów jest przecianne przez prost nearest neighbour - z podanego zbioru poda punkt le»acy najbli»ej wybranego
150 Geometria Obliczeniowa Co to jest? Bezpo±rednio zwiazane zagadnienia: opracowanie algorytmów: o mo»liwie niskiej zªo»ono±ci, odpornych na przypadki zdegenerowane, odpornych na bª dy zaokr gle«
151 Geometria Obliczeniowa Co to jest? Bezpo±rednio zwiazane zagadnienia: opracowanie algorytmów: o mo»liwie niskiej zªo»ono±ci, odpornych na przypadki zdegenerowane, odpornych na bª dy zaokr gle«opracowanie wydajnych struktur danych (niski czas dost pu, ªatwo± wyszukiwania, ª two± dodawania i usuwania elementów...)
152 Geometria Obliczeniowa Co to jest? Bezpo±rednio zwiazane zagadnienia: opracowanie algorytmów: o mo»liwie niskiej zªo»ono±ci, odpornych na przypadki zdegenerowane, odpornych na bª dy zaokr gle«opracowanie wydajnych struktur danych (niski czas dost pu, ªatwo± wyszukiwania, ª two± dodawania i usuwania elementów...) Osobnym problemem jest zaprojektowanie algorytmów i struktur danych w taki sposób aby dziaªaªy wydajnie w sytuacji dynamicznej, np.: ci gªego dodawania lub usuwania punktów.
153 Geometria Obliczeniowa Motywacja 1 Mamy dan map z zaznaczonynymi punktami (np.: stacje benzynowe albo toalety). Znale» najbli»szy punkt
154 Geometria Obliczeniowa Motywacja 1 Mamy dan map z zaznaczonynymi punktami (np.: stacje benzynowe albo toalety). Znale» najbli»szy punkt 2 Mamy dan map z zaznaczonym punktem i przeszkodami (np.: ulice, ±ciany). Znale¹ drog (najkrótsz ) prowadz c do tego puntktu, omijaj c przeszkody..
155 Geometria Obliczeniowa Motywacja 1 Mamy dan map z zaznaczonynymi punktami (np.: stacje benzynowe albo toalety). Znale» najbli»szy punkt 2 Mamy dan map z zaznaczonym punktem i przeszkodami (np.: ulice, ±ciany). Znale¹ drog (najkrótsz ) prowadz c do tego puntktu, omijaj c przeszkody.. 3 Mamy dwie mapy j.w. Znale¹ najkrótsz droge do najbli»szego punktu.
156 Geometria Obliczeniowa Motywacja 1 Mamy dwa obiekty geometryczne (np.: samochody). Stwierdzi czy si przecinaj.
157 Geometria Obliczeniowa Motywacja 1 Mamy dwa obiekty geometryczne (np.: samochody). Stwierdzi czy si przecinaj. 2 Mamy dane obiekty geometryczne. Stwierdzi które z nich s bli»ej a które dalej.
158 Geometria Obliczeniowa Motywacja 1 Mamy dwa obiekty geometryczne (np.: samochody). Stwierdzi czy si przecinaj. 2 Mamy dane obiekty geometryczne. Stwierdzi które z nich s bli»ej a które dalej. 3 Mamy dane obiekty geometryczne i prost (promie«swiatªa). Stwierdzi które z nich sa przecinane przez prost.
159 Geometria Obliczeniowa Motywacja 1 Mamy dany zbiór danych i jego podzbiór opisany przez pewne warunki (np.: nierówno±ci, warunki wyszukiwania). Znale¹ punkty nale» ce do tego podzbioru.
160 Geometria Obliczeniowa Motywacja 1 Mamy dany zbiór danych i jego podzbiór opisany przez pewne warunki (np.: nierówno±ci, warunki wyszukiwania). Znale¹ punkty nale» ce do tego podzbioru. 2 Mamy dane podzbiory (np.: map powiatów i map opadów) i punkty (np.: miasta). Znale¹ punkty nale»ace do wybranych podzbiorów.
161 Geometria Obliczeniowa Motywacja 1 Mamy dany zbiór danych i jego podzbiór opisany przez pewne warunki (np.: nierówno±ci, warunki wyszukiwania). Znale¹ punkty nale» ce do tego podzbioru. 2 Mamy dane podzbiory (np.: map powiatów i map opadów) i punkty (np.: miasta). Znale¹ punkty nale»ace do wybranych podzbiorów. 3 Mamy dwie mapy (np.: drogi i rzeki). Znale¹ punkty wspólne obu map.
162 Geometria Obliczeniowa Motywacja 1 Mamy dany zbiór danych i jego podzbiór opisany przez pewne warunki (np.: nierówno±ci, warunki wyszukiwania). Znale¹ punkty nale» ce do tego podzbioru. 2 Mamy dane podzbiory (np.: map powiatów i map opadów) i punkty (np.: miasta). Znale¹ punkty nale»ace do wybranych podzbiorów. 3 Mamy dwie mapy (np.: drogi i rzeki). Znale¹ punkty wspólne obu map. 4 Mamy zbiór obiektów geometrycznych i ¹ródªo ±wiatªa. Znale¹ obiekty o±wietlone, a dokªadniej o±wietlone sciany.
163 Geometria Obliczeniowa Motywacja Na rozwiazanie problemu natury geometrycznej (i ka»dego innego) skªada si : 1 Zrozumienie natury problemu, jego wªasno±ci geometrycznych.. 2 Zaprojektowanie algorytmów i struktur danych. 3 Optymalizacja zªo»ono±ci. 4 Analiza przypadków zdegenerowanych. 5 Analiza stabilno±ci.
164 Geometria Obliczeniowa Motywacja Informatyka Nawet perfekcyjne zrozumienie natury problemu, bez prawidªowego zastosowania technik algorytmicznych, nie pozwoli rozwiazac problemu efektywnie.
165 Geometria Obliczeniowa Motywacja Informatyka Nawet perfekcyjne zrozumienie natury problemu, bez prawidªowego zastosowania technik algorytmicznych, nie pozwoli rozwiazac problemu efektywnie. Matematyka Nawet perfekcyjne opanowanie technik programistycznych, bez zrozumienia natury geometrycznej problemu, nie pozwoli rozwi zac problemu wydajnie.
166 Geometria obliczeniowa 12 Otoczka wypukªa na pªaszczy¹nie Sformuªowanie problemu Analiza problemu Algorytm naiwny Lepszy algorytm Inne algorytmy
167 Otoczka wypukªa na pªaszczy¹nie Sformuªowanie problemu Zadanie Dla danych punktów na pªaszczy¹nie: p 1,..., p n, znale¹ otoczk wypukª zbioru tych punktów.
168 Otoczka wypukªa na pªaszczy¹nie Sformuªowanie problemu Zadanie Dla danych punktów na pªaszczy¹nie: p 1,..., p n, znale¹ otoczk wypukª zbioru tych punktów. Denicje 1 Zbiór P nazywamy wypukªym, je»eli wraz z ka»d par punktów p, q P, do zbioru nale»y odcinek pq 2 Otoczk wypukªa (ang. convex hull) zbioru P nazywamy najmniejszy zbiór wypukªy zawieraj cy zbiór P. Oznaczenie CH(P ). Otoczka wypukªa to cz ± wspólna wszystkich zbiorów wypukªych zawieraj cych P.
169 Otoczka wypukªa na pªaszczy¹nie Sformuªowanie problemu
170 Otoczka wypukªa na pªaszczy¹nie Analiza problemu Denicja otoczki wypukªej jest nieprzydatna, musimy znale¹ charakteryzacj. Otoczk wypukª mo»emy sobie wyobrazi jako gumk recepturk rozpi t na zbiorze.
171 Otoczka wypukªa na pªaszczy¹nie Analiza problemu Denicja otoczki wypukªej jest nieprzydatna, musimy znale¹ charakteryzacj. Otoczk wypukª mo»emy sobie wyobrazi jako gumk recepturk rozpi t na zbiorze. Charakteryzacja: Otoczka wypukªa zbioru P to wielok t, którego wierzchoªkami s punkty ze zbioru P, zawieraj cy wszystkie punkty P. Jest on wyznaczony jednoznacznie.
172 Otoczka wypukªa na pªaszczy¹nie Analiza problemu Jak opisa wielok t? Wielok t opisujemy jako list wierzchoªków, wypisanych w kolejno±ci zgodnej z ruchem wskazówek zegara (zaczynaj c od dowolnego wierzchoªka).
173 Otoczka wypukªa na pªaszczy¹nie Analiza problemu Jak opisa wielok t? Wielok t opisujemy jako list wierzchoªków, wypisanych w kolejno±ci zgodnej z ruchem wskazówek zegara (zaczynaj c od dowolnego wierzchoªka). Przeformuªowanie problemu Dla danej listy punktów P na pªaszczy¹nie wyznaczy list tych elementów które s wierzchoªkami CH(P ) w kolejno±ci CW.
174 Otoczka wypukªa na pªaszczy¹nie Analiza problemu
175 Otoczka wypukªa na pªaszczy¹nie Analiza problemu Obserwacja 1 Rozwa»my dwa kolejne wierzchoªki p, q P wielok ta CH(P ) oraz kraw d¹ (skierowan ) pq. Wszystkie punkty zbioru P le» po prawej stronie prostej (skierowanej) pq Obserwacja 2 Je»eli wszystkie punkty zbioru P \ {p, q} le» po prawej stronie prostej (skierowanej) pq, to pq jest kraw dzi CH(P ).
176 Algorytm 1 NaiveConvexHull(P) Input: P - zbiór punktów na pªaszczy¹nie Output: L - lista wierzchoªków wielok ta CH(P ) 1: E 2: for all p, q P do 3: valid true 4: for all r P, r p, q do 5: if r le»y po prawej stronie prostej pq then valid false 6: end if 7: if valid then dodaj kraw d¹ pq do E 8: end if 9: end for 10: end for 11: ze zbioru kraw dzi E, utwórz list L wierzchoªków CH(P )
177 Otoczka wypukªa na pªaszczy¹nie Algorytm naiwny Dwa dodatkowe problemy wiczenia Napisa algorytmy: 5: sprawdzaj cy, czy punkt le»y po prawej stronie prostej 11: przetwarzaj cy list kraw dzi na list wierzchoªków
178 Otoczka wypukªa na pªaszczy¹nie Algorytm naiwny Du»a zªo»ono± obliczeniowa Algorytm naiwny ma zªo»ono± obliczeniow O(n 3 ), gdzie n - liczba wierzchoªków. Zbyt du» dla zastosowa«, poza maªymi zbiorami.
179 Otoczka wypukªa na pªaszczy¹nie Algorytm naiwny Du»a zªo»ono± obliczeniowa Algorytm naiwny ma zªo»ono± obliczeniow O(n 3 ), gdzie n - liczba wierzchoªków. Zbyt du» dla zastosowa«, poza maªymi zbiorami. Nie zawsze dziaªa poprawnie W przypadku zdegenerowanym - punkty wspóªliniowe - algorytm dziaªa niepoprawnie. Je»eli punkty p, q, r s wspóªliniowe, to nie dodaje kraw dzi.
180 Otoczka wypukªa na pªaszczy¹nie Algorytm naiwny Du»a zªo»ono± obliczeniowa Algorytm naiwny ma zªo»ono± obliczeniow O(n 3 ), gdzie n - liczba wierzchoªków. Zbyt du» dla zastosowa«, poza maªymi zbiorami. Nie zawsze dziaªa poprawnie W przypadku zdegenerowanym - punkty wspóªliniowe - algorytm dziaªa niepoprawnie. Je»eli punkty p, q, r s wspóªliniowe, to nie dodaje kraw dzi. Nie jest stabilny numerycznie Je»eli punkty s prawie, prawie, ale to prawie wspóªliniowe, to w bª dy zaokr gle«mog spowodowa nieprzewidywalne zachowanie
181 Otoczka wypukªa na pªaszczy¹nie Algorytm naiwny Du»a zªo»ono± obliczeniowa Algorytm naiwny ma zªo»ono± obliczeniow O(n 3 ), gdzie n - liczba wierzchoªków. Zbyt du» dla zastosowa«, poza maªymi zbiorami. Nie zawsze dziaªa poprawnie W przypadku zdegenerowanym - punkty wspóªliniowe - algorytm dziaªa niepoprawnie. Je»eli punkty p, q, r s wspóªliniowe, to nie dodaje kraw dzi. Nie jest stabilny numerycznie Je»eli punkty s prawie, prawie, ale to prawie wspóªliniowe, to w bª dy zaokr gle«mog spowodowa nieprzewidywalne zachowanie Epic fail! Epic fail! Epic fail! Epic fail! Epic fail! Epic fail!
182 Otoczka wypukªa na pªaszczy¹nie Lepszy algorytm Zastosujemy podej±cie przyrostowe - wyznaczymy CH(P ) dodaj c po jednym punkcie, za ka»dym razem aktualizuj c rozwi zanie. Na pocz tek sortujemy punkty wzgl dem pierwszej wspóªrz dnej. Na pocz tek wyznaczymy górn kraw d¹ zaczynaj c od najbardziej lewego punktu ko«cz c na najbardziej prawym Potem wyznaczymy doln kraw d¹, przechodz c w przeciwnym kierunku.
183 Podstawowy krok: Otoczka wypukªa na pªaszczy¹nie Lepszy algorytm Zaªó»my,»e wyznaczyli±my górna kraw d¹ L up dla dla punktów p 1,..., p i 1. Dodajemy kolejny punkt p i.
184 Podstawowy krok: Otoczka wypukªa na pªaszczy¹nie Lepszy algorytm Zaªó»my,»e wyznaczyli±my górna kraw d¹ L up dla dla punktów p 1,..., p i 1. Dodajemy kolejny punkt p i. Obserwacja 1: poruszaj c si po brzegu wielok ta skr camy w lewo lub w prawo. Obserwacja 2: je»eli wielok t jest wypukªy, to skr camy tylko w prawo
185 Podstawowy krok: Otoczka wypukªa na pªaszczy¹nie Lepszy algorytm Zaªó»my,»e wyznaczyli±my górna kraw d¹ L up dla dla punktów p 1,..., p i 1. Dodajemy kolejny punkt p i. Obserwacja 1: poruszaj c si po brzegu wielok ta skr camy w lewo lub w prawo. Obserwacja 2: je»eli wielok t jest wypukªy, to skr camy tylko w prawo Dodajemy p i do L up. Zauwa»my,»e p i nale»y do otoczki wypukªej punktów p 1,..., p i, bo jest najbardziej na prawo.
186 Podstawowy krok: Otoczka wypukªa na pªaszczy¹nie Lepszy algorytm Zaªó»my,»e wyznaczyli±my górna kraw d¹ L up dla dla punktów p 1,..., p i 1. Dodajemy kolejny punkt p i. Obserwacja 1: poruszaj c si po brzegu wielok ta skr camy w lewo lub w prawo. Obserwacja 2: je»eli wielok t jest wypukªy, to skr camy tylko w prawo Dodajemy p i do L up. Zauwa»my,»e p i nale»y do otoczki wypukªej punktów p 1,..., p i, bo jest najbardziej na prawo. Je»eli trzy ostatnie punkty tworz zakr t w prawo -> OK, dodajemy nast pny punkt W przeciwnym wypadku, usuwamy ±rodkowy, Powtarzamy sprawdzenie dla nowych trzech ostatnich, lub a» zostan tylko dwa.
187 Algorytm 2 ConvexHull(P) Input: P - zbiór punktów na pªaszczy¹nie Output: L - lista wierzchoªków wielok ta CH(P ) 1: posortuj wierzchoªki wg pierwszej wspóªrz dnej 2: L up p 1, L up p 2, 3: for i = 3 to n do 4: L up p i 5: while L up zawiera wi cej ni» 3 punkty and ostanie trzy nie tworz zakr tu w prawo do 6: usu«±rodkowy z trzech ostatnich 7: end while 8: end for 9: L down p n, L down p n 1 10: for i=n-2 to 1 do 11: L down p i 12: while L down zawiera wi cej ni» 3 punkty and ostanie trzy nie tworz zakr tu w prawo do 13: usu«±rodkowy z trzech ostatnich 14: end while 15: end for 16: Usu«pierwszy i ostatni punkt z L down 17: return poª czone listy L up i L down
188 Otoczka wypukªa na pªaszczy¹nie Lepszy algorytm {4, 10} {6, 10} {9, 10} {4, 10} {6, 10} {9, 10} {7, 9} {7, 9} {2, 6} {2, 6} {0, 5} {6, 5} {0, 5} {6, 5} {9, 4} {9, 4} {7, 3} {7, 3} {8, 2} {8, 2} {5, 1} {5, 1} {7, 0} {7, 0}
189 Otoczka wypukªa na pªaszczy¹nie Lepszy algorytm Nie dziaªa poprawnie Je»eli dwa punkty maj t sam pierwsz wspóªrz dn, nie mamy dobrego porz dku (co to powoduje?). Problem rozwi zujemy sortuj c leksykogracznie.
190 Otoczka wypukªa na pªaszczy¹nie Lepszy algorytm Nie dziaªa poprawnie Je»eli dwa punkty maj t sam pierwsz wspóªrz dn, nie mamy dobrego porz dku (co to powoduje?). Problem rozwi zujemy sortuj c leksykogracznie. Punkty wspóªliniowe nie tworz zakr tu. Nale»y je traktowa, jako tworz ce zakr t w lewo.
191 Otoczka wypukªa na pªaszczy¹nie Lepszy algorytm Nie dziaªa poprawnie Je»eli dwa punkty maj t sam pierwsz wspóªrz dn, nie mamy dobrego porz dku (co to powoduje?). Problem rozwi zujemy sortuj c leksykogracznie. Punkty wspóªliniowe nie tworz zakr tu. Nale»y je traktowa, jako tworz ce zakr t w lewo. Dobra zªo»ono± Algorytm ma zªo»ono± obliczeniow O(n log n), gdzie n - liczba wierzchoªków. Bez sortowania leksykogracznego jest O(n), bo sortowanie zajmuje wi cej czasu.
192 Otoczka wypukªa na pªaszczy¹nie Inne algorytmy Istniej lepsze algorytmy: O(log n), O(log 2 n), a nawet O(hn), h- ilo± punktów CH(P ) (Jarvis), a nawet O(n log h) (Chan, 1996)!
193 wiczenie Opisa dziaªanie i zaimplementowa. Algorytm 3 JarvisConvexHull(P) Input: P - zbiór punktów na pªaszczy¹nie Output: L - lista wierzchoªków wielok ta CH(P ) 1: p punkt le» cy najbardziej na lewo 2: i = 0 3: repeat 4: L[i] p 5: endpoint P [0] 6: for j=1to P do 7: if endpoint == p or P [j] le»y na lewo od prostej przez P [i] i endpoint then 8: endpoint P [j] 9: end if 10: i : p endpoint 12: end for 13: until endpoint == L[0]
194 Algorytm rekurencyjny typu dziel i rz d¹. Zªo»ono± O(n log n), pesymistycznie O(n 2 ). Algorytm 4 QuickHull(P) Input: P - zbiór punktów na pªaszczy¹nie Output: L - lista wierzchoªków wielok ta CH(P ) 1: znajd¹ punkty o minimalnej p xmin i maksymalnej p xmax pierwszej wspóªrz dnej, i dodaj je do CH 2: za pomoc prostej p xmin, p xmax podziel P na dwa zbiory, punktów nad i pod prost 3: dla ka»dego z nich: 4: if jest pusty then koniec 5: end if 6: if zawiera jeden punkt then dodaj go do CH and koniec 7: else 8: znajd¹ punkt le» cy najdalej od prostej i utwórz trójk t 9: punkty wewn trz trójk ta nie nale» do CH i mo»na je odrzuci 10: dla nowych prostych (boków trójk ta) znajd¹ punkty le» ce po lewej stronie 11: powtórz poprzednie dwa kroki dla tych zbiorów i nowych prostych 12: end if
Wstęp do grafiki komputerowej i geometrii obliczeniowej. Jakub Maksymiuk
 Wstęp do grafiki komputerowej i geometrii obliczeniowej Jakub Maksymiuk Przekształcenia geometryczne w 2D 1 Przekształcenia geometryczne Przekształcenia na płaszczyźnie Translacje Skalowanie względem (0,
Wstęp do grafiki komputerowej i geometrii obliczeniowej Jakub Maksymiuk Przekształcenia geometryczne w 2D 1 Przekształcenia geometryczne Przekształcenia na płaszczyźnie Translacje Skalowanie względem (0,
Zadania z z matematyki dla studentów gospodarki przestrzennej UŠ. Marek Majewski Aktualizacja: 31 pa¹dziernika 2006
 Zadania z z matematyki dla studentów gospodarki przestrzennej UŠ Marek Majewski Aktualizacja: 1 pa¹dziernika 006 Spis tre±ci 1 Macierze dziaªania na macierzach. Wyznaczniki 1 Macierz odwrotna. Rz d macierzy
Zadania z z matematyki dla studentów gospodarki przestrzennej UŠ Marek Majewski Aktualizacja: 1 pa¹dziernika 006 Spis tre±ci 1 Macierze dziaªania na macierzach. Wyznaczniki 1 Macierz odwrotna. Rz d macierzy
Wektory w przestrzeni
 Wektory w przestrzeni Informacje pomocnicze Denicja 1. Wektorem nazywamy uporz dkowan par punktów. Pierwszy z tych punktów nazywamy pocz tkiem wektora albo punktem zaczepienia wektora, a drugi - ko«cem
Wektory w przestrzeni Informacje pomocnicze Denicja 1. Wektorem nazywamy uporz dkowan par punktów. Pierwszy z tych punktów nazywamy pocz tkiem wektora albo punktem zaczepienia wektora, a drugi - ko«cem
Stereometria (geometria przestrzenna)
") Stereometria (geometria przestrzenna) Wzajemne poªo»enie prostych w przestrzeni Stereometria jest dziaªem geometrii, którego przedmiotem bada«s bryªy przestrzenne oraz ich wªa±ciwo±ci. Na pocz tek omówimy
Stereometria (geometria przestrzenna) Wzajemne poªo»enie prostych w przestrzeni Stereometria jest dziaªem geometrii, którego przedmiotem bada«s bryªy przestrzenne oraz ich wªa±ciwo±ci. Na pocz tek omówimy
Arkusz 4. Elementy geometrii analitycznej w przestrzeni
 Arkusz 4. Elementy geometrii analitycznej w przestrzeni Zadanie 4.1. Obliczy dªugo±ci podanych wektorów a) a = [, 4, 12] b) b = [, 5, 2 2 ] c) c = [ρ cos φ, ρ sin φ, h], ρ 0, φ, h R c) d = [ρ cos φ cos
Arkusz 4. Elementy geometrii analitycznej w przestrzeni Zadanie 4.1. Obliczy dªugo±ci podanych wektorów a) a = [, 4, 12] b) b = [, 5, 2 2 ] c) c = [ρ cos φ, ρ sin φ, h], ρ 0, φ, h R c) d = [ρ cos φ cos
Elementy geometrii w przestrzeni R 3
 Elementy geometrii w przestrzeni R 3 Z.Šagodowski Politechnika Lubelska 29 maja 2016 Podstawowe denicje Wektorem nazywamy uporz dkowan par punktów (A,B) z których pierwszy nazywa si pocz tkiem a drugi
Elementy geometrii w przestrzeni R 3 Z.Šagodowski Politechnika Lubelska 29 maja 2016 Podstawowe denicje Wektorem nazywamy uporz dkowan par punktów (A,B) z których pierwszy nazywa si pocz tkiem a drugi
r = x x2 2 + x2 3.
 Przestrze«aniczna Def. 1. Przestrzeni aniczn zwi zan z przestrzeni liniow V nazywamy dowolny niepusty zbiór P z dziaªaniem ω : P P V (które dowolnej parze elementów zbioru P przyporz dkowuje wektor z przestrzeni
Przestrze«aniczna Def. 1. Przestrzeni aniczn zwi zan z przestrzeni liniow V nazywamy dowolny niepusty zbiór P z dziaªaniem ω : P P V (które dowolnej parze elementów zbioru P przyporz dkowuje wektor z przestrzeni
Elementy geometrii analitycznej w przestrzeni
 Wykªad 3 Elementy geometrii analitycznej w przestrzeni W wykªadzie tym wi kszy nacisk zostaª poªo»ony raczej na intuicyjne rozumienie deniowanych poj, ni» ±cisªe ich zdeniowanie. Dlatego niniejszy wykªad
Wykªad 3 Elementy geometrii analitycznej w przestrzeni W wykªadzie tym wi kszy nacisk zostaª poªo»ony raczej na intuicyjne rozumienie deniowanych poj, ni» ±cisªe ich zdeniowanie. Dlatego niniejszy wykªad
Przeksztaªcenia liniowe
 Przeksztaªcenia liniowe Przykªady Pokaza,»e przeksztaªcenie T : R 2 R 2, postaci T (x, y) = (x + y, x 6y) jest przeksztaªceniem liniowym Sprawdzimy najpierw addytywno± przeksztaªcenia T Niech v = (x, y
Przeksztaªcenia liniowe Przykªady Pokaza,»e przeksztaªcenie T : R 2 R 2, postaci T (x, y) = (x + y, x 6y) jest przeksztaªceniem liniowym Sprawdzimy najpierw addytywno± przeksztaªcenia T Niech v = (x, y
Krzywe i powierzchnie stopnia drugiego
 Krzywe i powierzchnie stopnia drugiego Iwona Malinowska, Zbigniew Šagodowski 25 maja 2015 I. Malinowska, Z. Lagodowski Geometria 25 maja 2015 1 / 30 Rozwa»my dwie proste przecinaj ce si pod k tem α, 0
Krzywe i powierzchnie stopnia drugiego Iwona Malinowska, Zbigniew Šagodowski 25 maja 2015 I. Malinowska, Z. Lagodowski Geometria 25 maja 2015 1 / 30 Rozwa»my dwie proste przecinaj ce si pod k tem α, 0
WBiA Architektura i Urbanistyka. 1. Wykonaj dziaªania na macierzach: Które z iloczynów: A 2 B, AB 2, BA 2, B 2 3, B = 1 2 0
 WBiA Architektura i Urbanistyka Matematyka wiczenia 1. Wykonaj dziaªania na macierzach: 1) 2A + C 2) A C T ) B A 4) B C T 5) A 2 B T 1 0 2 dla A = 1 2 1 1 0 B = ( 1 2 1 0 1 ) C = 1 2 1 0 2 1 0 1 2. Które
WBiA Architektura i Urbanistyka Matematyka wiczenia 1. Wykonaj dziaªania na macierzach: 1) 2A + C 2) A C T ) B A 4) B C T 5) A 2 B T 1 0 2 dla A = 1 2 1 1 0 B = ( 1 2 1 0 1 ) C = 1 2 1 0 2 1 0 1 2. Które
Wykªad 4. Funkcje wielu zmiennych.
 Wykªad jest prowadzony w oparciu o podr cznik Analiza matematyczna 2. Denicje, twierdzenia, wzory M. Gewerta i Z. Skoczylasa. Wykªad 4. Funkcje wielu zmiennych. Zbiory na pªaszczy¹nie i w przestrzeni.
Wykªad jest prowadzony w oparciu o podr cznik Analiza matematyczna 2. Denicje, twierdzenia, wzory M. Gewerta i Z. Skoczylasa. Wykªad 4. Funkcje wielu zmiennych. Zbiory na pªaszczy¹nie i w przestrzeni.
Graka komputerowa Wykªad 3 Geometria pªaszczyzny
 Graka komputerowa Wykªad 3 Geometria pªaszczyzny Instytut Informatyki i Automatyki Pa«stwowa Wy»sza Szkoªa Informatyki i Przedsi biorczo±ci w Šom»y 2 0 0 9 Spis tre±ci Spis tre±ci 1 Przeksztaªcenia pªaszczyzny
Graka komputerowa Wykªad 3 Geometria pªaszczyzny Instytut Informatyki i Automatyki Pa«stwowa Wy»sza Szkoªa Informatyki i Przedsi biorczo±ci w Šom»y 2 0 0 9 Spis tre±ci Spis tre±ci 1 Przeksztaªcenia pªaszczyzny
Rozwi zanie równania ró»niczkowego metod operatorow (zastosowanie transformaty Laplace'a).
.") Rozwi zania zada«z egzaminu podstawowego z Analizy matematycznej 2.3A (24/5). Rozwi zanie równania ró»niczkowego metod operatorow (zastosowanie transformaty Laplace'a). Zadanie P/4. Metod operatorow rozwi
Rozwi zania zada«z egzaminu podstawowego z Analizy matematycznej 2.3A (24/5). Rozwi zanie równania ró»niczkowego metod operatorow (zastosowanie transformaty Laplace'a). Zadanie P/4. Metod operatorow rozwi
Arkusz maturalny. Šukasz Dawidowski. 25 kwietnia 2016r. Powtórki maturalne
 Arkusz maturalny Šukasz Dawidowski Powtórki maturalne 25 kwietnia 2016r. Odwrotno±ci liczby rzeczywistej 1. 9 8 2. 0, (1) 3. 8 9 4. 0, (8) 3 4 4 4 1 jest liczba Odwrotno±ci liczby rzeczywistej 3 4 4 4
Arkusz maturalny Šukasz Dawidowski Powtórki maturalne 25 kwietnia 2016r. Odwrotno±ci liczby rzeczywistej 1. 9 8 2. 0, (1) 3. 8 9 4. 0, (8) 3 4 4 4 1 jest liczba Odwrotno±ci liczby rzeczywistej 3 4 4 4
AM II /2019 (gr. 2 i 3) zadania przygotowawcze do I kolokwium
 zadania przygotowawcze do I kolokwium") AM II.1 2018/2019 (gr. 2 i 3) zadania przygotowawcze do I kolokwium Normy w R n, iloczyn skalarny sprawd¹ czy dana funkcja jest norm sprawd¹, czy dany zbiór jest kul w jakiej± normie i oblicz norm wybranego
AM II.1 2018/2019 (gr. 2 i 3) zadania przygotowawcze do I kolokwium Normy w R n, iloczyn skalarny sprawd¹ czy dana funkcja jest norm sprawd¹, czy dany zbiór jest kul w jakiej± normie i oblicz norm wybranego
Rachunek caªkowy funkcji wielu zmiennych
 Rachunek caªkowy funkcji wielu zmiennych I. Malinowska, Z. Šagodowski Politechnika Lubelska 8 czerwca 2015 Caªka iterowana podwójna Denicja Je»eli funkcja f jest ci gªa na prostok cie P = {(x, y) : a x
Rachunek caªkowy funkcji wielu zmiennych I. Malinowska, Z. Šagodowski Politechnika Lubelska 8 czerwca 2015 Caªka iterowana podwójna Denicja Je»eli funkcja f jest ci gªa na prostok cie P = {(x, y) : a x
2. L(a u) = al( u) dla dowolnych u U i a R. Uwaga 1. Warunki 1., 2. mo»na zast pi jednym warunkiem: L(a u + b v) = al( u) + bl( v)
 = al( u) dla dowolnych u U i a R. Uwaga 1. Warunki 1., 2. mo»na zast pi jednym warunkiem: L(a u + b v) = al( u) + bl( v)") Przeksztaªcenia liniowe Def 1 Przeksztaªceniem liniowym (homomorzmem liniowym) rzeczywistych przestrzeni liniowych U i V nazywamy dowoln funkcj L : U V speªniaj c warunki: 1 L( u + v) = L( u) + L( v) dla
Przeksztaªcenia liniowe Def 1 Przeksztaªceniem liniowym (homomorzmem liniowym) rzeczywistych przestrzeni liniowych U i V nazywamy dowoln funkcj L : U V speªniaj c warunki: 1 L( u + v) = L( u) + L( v) dla
1. Przedstaw w postaci algebraicznej liczby zespolone: 2. Narysuj zbiory punktów na pªaszczy¹nie:
 ZADANIA Z MATEMATYKI Zestaw. Przedstaw w postaci algebraicznej liczby zespolone: (3 + j)(5 j) 3 j +j (5 + j) (3 + j) 3. Narysuj zbiory punktów na pªaszczy¹nie: +j +j 3 Re z = Im z = 5 z ( j) = z j z +
ZADANIA Z MATEMATYKI Zestaw. Przedstaw w postaci algebraicznej liczby zespolone: (3 + j)(5 j) 3 j +j (5 + j) (3 + j) 3. Narysuj zbiory punktów na pªaszczy¹nie: +j +j 3 Re z = Im z = 5 z ( j) = z j z +
Podstawy POV-Ray'a. Diana Doma«ska. Uniwersytet l ski. Diana Doma«ska (U ) Podstawy POV-Ray'a 1 / 13
 Podstawy POV-Ray'a 1 / 13") Podstawy POV-Ray'a Diana Doma«ska Uniwersytet l ski Diana Doma«ska (U ) Podstawy POV-Ray'a 1 / 13 POV-Ray (Persistence of Vision Raytracer) jest j zykiem opisu sceny sªu» cym do tworzenia trójwymiarowej
Podstawy POV-Ray'a Diana Doma«ska Uniwersytet l ski Diana Doma«ska (U ) Podstawy POV-Ray'a 1 / 13 POV-Ray (Persistence of Vision Raytracer) jest j zykiem opisu sceny sªu» cym do tworzenia trójwymiarowej
Metody numeryczne i statystyka dla in»ynierów
 Kierunek: Automatyka i Robotyka, II rok Interpolacja PWSZ Gªogów, 2009 Interpolacja Okre±lenie zale»no±ci pomi dzy interesuj cymi nas wielko±ciami, Umo»liwia uproszczenie skomplikowanych funkcji (np. wykorzystywana
Kierunek: Automatyka i Robotyka, II rok Interpolacja PWSZ Gªogów, 2009 Interpolacja Okre±lenie zale»no±ci pomi dzy interesuj cymi nas wielko±ciami, Umo»liwia uproszczenie skomplikowanych funkcji (np. wykorzystywana
1 Granice funkcji wielu zmiennych.
 AM WNE 008/009. Odpowiedzi do zada«przygotowawczych do czwartego kolokwium. Granice funkcji wielu zmiennych. Zadanie. Zadanie. Pochodne. (a) 0, Granica nie istnieje, (c) Granica nie istnieje, (d) Granica
AM WNE 008/009. Odpowiedzi do zada«przygotowawczych do czwartego kolokwium. Granice funkcji wielu zmiennych. Zadanie. Zadanie. Pochodne. (a) 0, Granica nie istnieje, (c) Granica nie istnieje, (d) Granica
1 a + b 1 = 1 a + 1 b 1. (a + b 1)(a + b ab) = ab, (a + b)(a + b ab 1) = 0, (a + b)[a(1 b) + (b 1)] = 0,
![1 a + b 1 = 1 a + 1 b 1. (a + b 1)(a + b ab) = ab, (a + b)(a + b ab 1) = 0, (a + b)[a(1 b) + (b 1)] = 0,](/thumbs/93/111864182.jpg "1 a + b 1 = 1 a + 1 b 1. (a + b 1)(a + b ab) = ab, (a + b)(a + b ab 1) = 0, (a + b)[a(1 b) + (b 1)] = 0,") XIII Warmi«sko-Mazurskie Zawody Matematyczne. Olsztyn 2015 Rozwi zania zada«dla szkóª ponadgimnazjalnych ZADANIE 1 Zakªadamy,»e a, b 0, 1 i a + b 1. Wykaza,»e z równo±ci wynika,»e a = -b 1 a + b 1 = 1
XIII Warmi«sko-Mazurskie Zawody Matematyczne. Olsztyn 2015 Rozwi zania zada«dla szkóª ponadgimnazjalnych ZADANIE 1 Zakªadamy,»e a, b 0, 1 i a + b 1. Wykaza,»e z równo±ci wynika,»e a = -b 1 a + b 1 = 1
1 Przypomnienie wiadomo±ci ze szkoªy ±redniej. Rozwi zywanie prostych równa«i nierówno±ci
 Zebraª do celów edukacyjnych od wykªadowców PK, z ró»nych podr czników Maciej Zakarczemny 1 Przypomnienie wiadomo±ci ze szkoªy ±redniej Rozwi zywanie prostych równa«i nierówno±ci dotycz cych funkcji elementarnych,
Zebraª do celów edukacyjnych od wykªadowców PK, z ró»nych podr czników Maciej Zakarczemny 1 Przypomnienie wiadomo±ci ze szkoªy ±redniej Rozwi zywanie prostych równa«i nierówno±ci dotycz cych funkcji elementarnych,
XVII Warmi«sko-Mazurskie Zawody Matematyczne
 1 XVII Warmi«sko-Mazurskie Zawody Matematyczne Kategoria: klasa VIII szkoªy podstawowej i III gimnazjum Olsztyn, 16 maja 2019r. Zad. 1. Udowodnij,»e dla dowolnych liczb rzeczywistych x, y, z speªniaj cych
1 XVII Warmi«sko-Mazurskie Zawody Matematyczne Kategoria: klasa VIII szkoªy podstawowej i III gimnazjum Olsztyn, 16 maja 2019r. Zad. 1. Udowodnij,»e dla dowolnych liczb rzeczywistych x, y, z speªniaj cych
Materiaªy do Repetytorium z matematyki
 Materiaªy do Repetytorium z matematyki 0/0 Dziaªania na liczbach wymiernych i niewymiernych wiczenie Obliczy + 4 + 4 5. ( + ) ( 4 + 4 5). ( : ) ( : 4) 4 5 6. 7. { [ 7 4 ( 0 7) ] ( } : 5) : 0 75 ( 8) (
Materiaªy do Repetytorium z matematyki 0/0 Dziaªania na liczbach wymiernych i niewymiernych wiczenie Obliczy + 4 + 4 5. ( + ) ( 4 + 4 5). ( : ) ( : 4) 4 5 6. 7. { [ 7 4 ( 0 7) ] ( } : 5) : 0 75 ( 8) (
Zbiory i odwzorowania
 Zbiory i odwzorowania 1 Sposoby okre±lania zbiorów 1) Zbiór wszystkich elementów postaci f(t), gdzie t przebiega zbiór T : {f(t); t T }. 2) Zbiór wszystkich elementów x zbioru X speªniaj cych warunek ϕ(x):
Zbiory i odwzorowania 1 Sposoby okre±lania zbiorów 1) Zbiór wszystkich elementów postaci f(t), gdzie t przebiega zbiór T : {f(t); t T }. 2) Zbiór wszystkich elementów x zbioru X speªniaj cych warunek ϕ(x):
c Marcin Sydow Planarno± Grafy i Zastosowania Tw. Eulera 7: Planarno± Inne powierzchnie Dualno± Podsumowanie
 7: Spis zagadnie«twierdzenie Kuratowskiego Wªasno±ci planarno±ci Twierdzenie Eulera Grafy na innych powierzchniach Poj cie dualno±ci geometrycznej i abstrakcyjnej Graf Planarny Graf planarny to taki graf,
7: Spis zagadnie«twierdzenie Kuratowskiego Wªasno±ci planarno±ci Twierdzenie Eulera Grafy na innych powierzchniach Poj cie dualno±ci geometrycznej i abstrakcyjnej Graf Planarny Graf planarny to taki graf,
c Marcin Sydow Przepªywy Grafy i Zastosowania Podsumowanie 12: Przepªywy w sieciach
 12: w sieciach Spis zagadnie«sieci przepªywowe przepªywy w sieciach ±cie»ka powi kszaj ca tw. Forda-Fulkersona Znajdowanie maksymalnego przepªywu Zastosowania przepªywów Sieci przepªywowe Sie przepªywowa
12: w sieciach Spis zagadnie«sieci przepªywowe przepªywy w sieciach ±cie»ka powi kszaj ca tw. Forda-Fulkersona Znajdowanie maksymalnego przepªywu Zastosowania przepªywów Sieci przepªywowe Sie przepªywowa
1 Bª dy i arytmetyka zmiennopozycyjna
 1 Bª dy i arytmetyka zmiennopozycyjna Liczby w pami ci komputera przedstawiamy w ukªadzie dwójkowym w postaci zmiennopozycyjnej Oznacza to,»e s one postaci ±m c, 01 m < 1, c min c c max, (1) gdzie m nazywamy
1 Bª dy i arytmetyka zmiennopozycyjna Liczby w pami ci komputera przedstawiamy w ukªadzie dwójkowym w postaci zmiennopozycyjnej Oznacza to,»e s one postaci ±m c, 01 m < 1, c min c c max, (1) gdzie m nazywamy
Ksztaªt orbity planety: I prawo Keplera
 V 0 V 0 Ksztaªt orbity planety: I prawo Keplera oka»emy,»e orbit planety poruszaj cej si pod dziaªaniem siªy ci»ko±ci ze strony Sªo«ca jest krzywa sto»kowa, w szczególno±ci elipsa. Wektor pr dko±ci planety
V 0 V 0 Ksztaªt orbity planety: I prawo Keplera oka»emy,»e orbit planety poruszaj cej si pod dziaªaniem siªy ci»ko±ci ze strony Sªo«ca jest krzywa sto»kowa, w szczególno±ci elipsa. Wektor pr dko±ci planety
Informacje pomocnicze
 Funkcje wymierne. Równania i nierówno±ci wymierne Denicja. (uªamki proste) Wyra»enia postaci Informacje pomocnicze A gdzie A d e R n N (dx e) n nazywamy uªamkami prostymi pierwszego rodzaju. Wyra»enia
Funkcje wymierne. Równania i nierówno±ci wymierne Denicja. (uªamki proste) Wyra»enia postaci Informacje pomocnicze A gdzie A d e R n N (dx e) n nazywamy uªamkami prostymi pierwszego rodzaju. Wyra»enia
Lab. 02: Algorytm Schrage
 Lab. 02: Algorytm Schrage Andrzej Gnatowski 5 kwietnia 2015 1 Opis zadania Celem zadania laboratoryjnego jest zapoznanie si z jednym z przybli»onych algorytmów sªu» cych do szukania rozwi za«znanego z
Lab. 02: Algorytm Schrage Andrzej Gnatowski 5 kwietnia 2015 1 Opis zadania Celem zadania laboratoryjnego jest zapoznanie si z jednym z przybli»onych algorytmów sªu» cych do szukania rozwi za«znanego z
Optyka geometryczna. Zwierciadªa. Marcin S. Ma kowicz. rok szk. 2009/2010. Zespóª Szkóª Ponadgimnazjalnych Nr 2 w Brzesku
 Optyka geometryczna Zespóª Szkóª Ponadgimnazjalnych Nr 2 w Brzesku rok szk. 2009/2010 Spis tre±ci 1 2 Jak konstuowa obraz w zwierciadle pªaskim 3 Konstrukcja obrazu w zwierciadle kulistym wkl sªym Równanie
Optyka geometryczna Zespóª Szkóª Ponadgimnazjalnych Nr 2 w Brzesku rok szk. 2009/2010 Spis tre±ci 1 2 Jak konstuowa obraz w zwierciadle pªaskim 3 Konstrukcja obrazu w zwierciadle kulistym wkl sªym Równanie
Zadania z PM II A. Strojnowski str. 1. Zadania przygotowawcze z Podstaw Matematyki seria 2
 Zadania z PM II 010-011 A. Strojnowski str. 1 Zadania przygotowawcze z Podstaw Matematyki seria Zadanie 1 Niech A = {1,, 3, 4} za± T A A b dzie relacj okre±lon wzorem: (a, b) T, gdy n N a n = b. a) Ile
Zadania z PM II 010-011 A. Strojnowski str. 1 Zadania przygotowawcze z Podstaw Matematyki seria Zadanie 1 Niech A = {1,, 3, 4} za± T A A b dzie relacj okre±lon wzorem: (a, b) T, gdy n N a n = b. a) Ile
Funkcje, wielomiany. Informacje pomocnicze
 Funkcje, wielomiany Informacje pomocnicze Przydatne wzory: (a + b) 2 = a 2 + 2ab + b 2 (a b) 2 = a 2 2ab + b 2 (a + b) 3 = a 3 + 3a 2 b + 3ab 2 + b 3 (a b) 3 = a 3 3a 2 b + 3ab 2 b 3 a 2 b 2 = (a + b)(a
Funkcje, wielomiany Informacje pomocnicze Przydatne wzory: (a + b) 2 = a 2 + 2ab + b 2 (a b) 2 = a 2 2ab + b 2 (a + b) 3 = a 3 + 3a 2 b + 3ab 2 + b 3 (a b) 3 = a 3 3a 2 b + 3ab 2 b 3 a 2 b 2 = (a + b)(a
Ekstremalnie fajne równania
 Ekstremalnie fajne równania ELEMENTY RACHUNKU WARIACYJNEGO Zaczniemy od ogólnych uwag nt. rachunku wariacyjnego, który jest bardzo przydatnym narz dziem mog cym posªu»y do rozwi zywania wielu problemów
Ekstremalnie fajne równania ELEMENTY RACHUNKU WARIACYJNEGO Zaczniemy od ogólnych uwag nt. rachunku wariacyjnego, który jest bardzo przydatnym narz dziem mog cym posªu»y do rozwi zywania wielu problemów
Matematyka 1. Šukasz Dawidowski. Instytut Matematyki, Uniwersytet l ski
 Matematyka 1 Šukasz Dawidowski Instytut Matematyki, Uniwersytet l ski Pochodna funkcji Niech a, b R, a < b. Niech f : (a, b) R b dzie funkcj oraz x, x 0 (a, b) b d ró»nymi punktami przedziaªu (a, b). Wyra»enie
Matematyka 1 Šukasz Dawidowski Instytut Matematyki, Uniwersytet l ski Pochodna funkcji Niech a, b R, a < b. Niech f : (a, b) R b dzie funkcj oraz x, x 0 (a, b) b d ró»nymi punktami przedziaªu (a, b). Wyra»enie
Wykªad 7. Ekstrema lokalne funkcji dwóch zmiennych.
 Wykªad jest prowadzony w oparciu o podr cznik Analiza matematyczna 2. Denicje, twierdzenia, wzory M. Gewerta i Z. Skoczylasa. Wykªad 7. Ekstrema lokalne funkcji dwóch zmiennych. Denicja Mówimy,»e funkcja
Wykªad jest prowadzony w oparciu o podr cznik Analiza matematyczna 2. Denicje, twierdzenia, wzory M. Gewerta i Z. Skoczylasa. Wykªad 7. Ekstrema lokalne funkcji dwóch zmiennych. Denicja Mówimy,»e funkcja
Relacj binarn okre±lon w zbiorze X nazywamy podzbiór ϱ X X.
 Relacje 1 Relacj n-argumentow nazywamy podzbiór ϱ X 1 X 2... X n. Je±li ϱ X Y jest relacj dwuargumentow (binarn ), to zamiast (x, y) ϱ piszemy xϱy. Relacj binarn okre±lon w zbiorze X nazywamy podzbiór
Relacje 1 Relacj n-argumentow nazywamy podzbiór ϱ X 1 X 2... X n. Je±li ϱ X Y jest relacj dwuargumentow (binarn ), to zamiast (x, y) ϱ piszemy xϱy. Relacj binarn okre±lon w zbiorze X nazywamy podzbiór
PRZYPOMNIENIE Ka»d przestrze«wektorow V, o wymiarze dim V = n < nad ciaªem F mo»na jednoznacznie odwzorowa na przestrze«f n n-ek uporz dkowanych:
 Plan Spis tre±ci 1 Homomorzm 1 1.1 Macierz homomorzmu....................... 2 1.2 Dziaªania............................... 3 2 Ukªady równa«6 3 Zadania 8 1 Homomorzm PRZYPOMNIENIE Ka»d przestrze«wektorow
Plan Spis tre±ci 1 Homomorzm 1 1.1 Macierz homomorzmu....................... 2 1.2 Dziaªania............................... 3 2 Ukªady równa«6 3 Zadania 8 1 Homomorzm PRZYPOMNIENIE Ka»d przestrze«wektorow
Optymalizacja wypukªa: wybrane zagadnienia i zastosowania
 Optymalizacja wypukªa: wybrane zagadnienia i zastosowania 21 wrze±nia 2010 r. Ogólne Wypukªe Sto»kowe Zadania sprowadzalne do SOCP/SDP Ogólne Wypukªe Sto»kowe Zadania sprowadzalne do SOCP/SDP Ogólne zadanie
Optymalizacja wypukªa: wybrane zagadnienia i zastosowania 21 wrze±nia 2010 r. Ogólne Wypukªe Sto»kowe Zadania sprowadzalne do SOCP/SDP Ogólne Wypukªe Sto»kowe Zadania sprowadzalne do SOCP/SDP Ogólne zadanie
Janusz Adamowski METODY OBLICZENIOWE FIZYKI Zastosowanie eliptycznych równa«ró»niczkowych
 Janusz Adamowski METODY OBLICZENIOWE FIZYKI 1 Rozdziaª 9 RÓWNANIA ELIPTYCZNE 9.1 Zastosowanie eliptycznych równa«ró»niczkowych cz stkowych 9.1.1 Problemy z warunkami brzegowymi W przestrzeni dwuwymiarowej
Janusz Adamowski METODY OBLICZENIOWE FIZYKI 1 Rozdziaª 9 RÓWNANIA ELIPTYCZNE 9.1 Zastosowanie eliptycznych równa«ró»niczkowych cz stkowych 9.1.1 Problemy z warunkami brzegowymi W przestrzeni dwuwymiarowej
Funkcje wielu zmiennych
 Funkcje wielu zmiennych Informacje pomocnicze Denicja 1 Niech funkcja f(x, y) b dzie okre±lona przynajmniej na otoczeniu punktu (x 0, y 0 ) Pochodn cz stkow pierwszego rz du funkcji dwóch zmiennych wzgl
Funkcje wielu zmiennych Informacje pomocnicze Denicja 1 Niech funkcja f(x, y) b dzie okre±lona przynajmniej na otoczeniu punktu (x 0, y 0 ) Pochodn cz stkow pierwszego rz du funkcji dwóch zmiennych wzgl
X WARMI SKO-MAZURSKIE ZAWODY MATEMATYCZNE 18 maja 2012 (szkoªy ponadgimnazjalne)
") X WARMI SKO-MAZURSKIE ZAWODY MATEMATYCZNE 18 maja 2012 (szkoªy ponadgimnazjalne) Zadanie 1 Obecnie u»ywane tablice rejestracyjne wydawane s od 1 maja 2000r. Numery rejestracyjne aut s tworzone ze zbioru
X WARMI SKO-MAZURSKIE ZAWODY MATEMATYCZNE 18 maja 2012 (szkoªy ponadgimnazjalne) Zadanie 1 Obecnie u»ywane tablice rejestracyjne wydawane s od 1 maja 2000r. Numery rejestracyjne aut s tworzone ze zbioru
ODPOWIEDZI I SCHEMAT PUNKTOWANIA ZESTAW NR 2 POZIOM ROZSZERZONY. S x 3x y. 1.5 Podanie odpowiedzi: Poszukiwane liczby to : 2, 6, 5.
 Nr zadania Nr czynno ci... ODPOWIEDZI I SCHEMAT PUNKTOWANIA ZESTAW NR POZIOM ROZSZERZONY Etapy rozwi zania zadania Wprowadzenie oznacze : x, x, y poszukiwane liczby i zapisanie równania: x y lub: zapisanie
Nr zadania Nr czynno ci... ODPOWIEDZI I SCHEMAT PUNKTOWANIA ZESTAW NR POZIOM ROZSZERZONY Etapy rozwi zania zadania Wprowadzenie oznacze : x, x, y poszukiwane liczby i zapisanie równania: x y lub: zapisanie
*** Teoria popytu konsumenta *** I. Pole preferencji konsumenta 1. Przestrze«towarów 2. Relacja preferencji konsumenta 3. Optymalny koszyk towarów
 *** Teoria popytu konsumenta *** I. Pole preferencji konsumenta 1. Przestrze«towarów 2. Relacja preferencji konsumenta 3. Optymalny koszyk towarów I.1 Przestrze«towarów Podstawowe poj cia Rynek towarów
*** Teoria popytu konsumenta *** I. Pole preferencji konsumenta 1. Przestrze«towarów 2. Relacja preferencji konsumenta 3. Optymalny koszyk towarów I.1 Przestrze«towarów Podstawowe poj cia Rynek towarów
Modelowanie obiektów 3D
 Synteza i obróbka obrazu Modelowanie obiektów 3D Modelowanie Modelowanie opisanie kształtu obiektu. Najczęściej stosuje się reprezentację powierzchniową opis powierzchni obiektu. Najczęstsza reprezentacja
Synteza i obróbka obrazu Modelowanie obiektów 3D Modelowanie Modelowanie opisanie kształtu obiektu. Najczęściej stosuje się reprezentację powierzchniową opis powierzchni obiektu. Najczęstsza reprezentacja
Listy Inne przykªady Rozwi zywanie problemów. Listy w Mathematice. Marcin Karcz. Wydziaª Matematyki, Fizyki i Informatyki.
 Wydziaª Matematyki, Fizyki i Informatyki 10 marca 2008 Spis tre±ci Listy 1 Listy 2 3 Co to jest lista? Listy List w Mathematice jest wyra»enie oddzielone przecinkami i zamkni te w { klamrach }. Elementy
Wydziaª Matematyki, Fizyki i Informatyki 10 marca 2008 Spis tre±ci Listy 1 Listy 2 3 Co to jest lista? Listy List w Mathematice jest wyra»enie oddzielone przecinkami i zamkni te w { klamrach }. Elementy
Metody numeryczne i statystyka dla in»ynierów
 Kierunek: Automatyka i Robotyka, II rok Wprowadzenie PWSZ Gªogów, 2009 Plan wykªadów Wprowadzenie, podanie zagadnie«, poj cie metody numerycznej i algorytmu numerycznego, obszar zainteresowa«i stosowalno±ci
Kierunek: Automatyka i Robotyka, II rok Wprowadzenie PWSZ Gªogów, 2009 Plan wykªadów Wprowadzenie, podanie zagadnie«, poj cie metody numerycznej i algorytmu numerycznego, obszar zainteresowa«i stosowalno±ci
ANALIZA NUMERYCZNA. Grzegorz Szkibiel. Wiosna 2014/15
 ANALIZA NUMERYCZNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Metoda Eulera 3 1.1 zagadnienia brzegowe....................... 3 1.2 Zastosowanie ró»niczki...................... 4 1.3 Output do pliku
ANALIZA NUMERYCZNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Metoda Eulera 3 1.1 zagadnienia brzegowe....................... 3 1.2 Zastosowanie ró»niczki...................... 4 1.3 Output do pliku
Opis matematyczny ukªadów liniowych
 Rozdziaª 1 Opis matematyczny ukªadów liniowych Autorzy: Alicja Golnik 1.1 Formy opisu ukªadów dynamicznych 1.1.1 Liniowe równanie ró»niczkowe Podstawow metod przedstawienia procesu dynamicznego jest zbiór
Rozdziaª 1 Opis matematyczny ukªadów liniowych Autorzy: Alicja Golnik 1.1 Formy opisu ukªadów dynamicznych 1.1.1 Liniowe równanie ró»niczkowe Podstawow metod przedstawienia procesu dynamicznego jest zbiór
1 0 Je»eli wybierzemy baz A = ((1, 1), (2, 1)) to M(f) A A =. 0 2 Daje to znacznie lepszy opis endomorzmu f.
, (2, 1)) to M(f) A A =. 0 2 Daje to znacznie lepszy opis endomorzmu f.") GAL II 2012-2013 A Strojnowski str1 Wykªad 1 Ten semestr rozpoczniemy badaniem endomorzmów sko«czenie wymiarowych przestrzeni liniowych Denicja 11 Niech V b dzie przestrzeni liniow nad ciaªem K 1) Przeksztaªceniem
GAL II 2012-2013 A Strojnowski str1 Wykªad 1 Ten semestr rozpoczniemy badaniem endomorzmów sko«czenie wymiarowych przestrzeni liniowych Denicja 11 Niech V b dzie przestrzeni liniow nad ciaªem K 1) Przeksztaªceniem
ARYTMETYKA MODULARNA. Grzegorz Szkibiel. Wiosna 2014/15
 ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
a) f : R R R: f(x, y) = x 2 y 2 ; f(x, y) = 3xy; f(x, y) = max(xy, xy); b) g : R 2 R 2 R: g((x 1, y 1 ), (x 2, y 2 )) = 2x 1 y 1 x 2 y 2 ;
 f : R R R: f(x, y) = x 2 y 2 ; f(x, y) = 3xy; f(x, y) = max(xy, xy); b) g : R 2 R 2 R: g((x 1, y 1 ), (x 2, y 2 )) = 2x 1 y 1 x 2 y 2 ;") Zadania oznaczone * s troch trudniejsze, co nie oznacza,»e trudne.. Zbadaj czy funkcjonaª jest dwuliniowy, symetryczny, antysymetryczny, dodatniookre±lony: a) f : R R R: f(x, y) = x y ; f(x, y) = 3xy;
Zadania oznaczone * s troch trudniejsze, co nie oznacza,»e trudne.. Zbadaj czy funkcjonaª jest dwuliniowy, symetryczny, antysymetryczny, dodatniookre±lony: a) f : R R R: f(x, y) = x y ; f(x, y) = 3xy;
Technologie Informacyjne
 Technologie Informacyjne Szkoła Główna Służby Pożarniczej Zakład Informatyki i Łączności April 11, 2016 Technologie Informacyjne Wprowadzenie : wizualizacja obrazów poprzez wykorzystywanie technik komputerowych.
Technologie Informacyjne Szkoła Główna Służby Pożarniczej Zakład Informatyki i Łączności April 11, 2016 Technologie Informacyjne Wprowadzenie : wizualizacja obrazów poprzez wykorzystywanie technik komputerowych.
Funkcje wielu zmiennych
 dr Krzysztof yjewski Informatyka I rok I 0 in» 12 stycznia 2016 Funkcje wielu zmiennych Informacje pomocnicze Denicja 1 Niech funkcja f(x y) b dzie okre±lona przynajmniej na otoczeniu punktu (x 0 y 0 )
dr Krzysztof yjewski Informatyka I rok I 0 in» 12 stycznia 2016 Funkcje wielu zmiennych Informacje pomocnicze Denicja 1 Niech funkcja f(x y) b dzie okre±lona przynajmniej na otoczeniu punktu (x 0 y 0 )
c Marcin Sydow Spójno± Grafy i Zastosowania Grafy Eulerowskie 2: Drogi i Cykle Grafy Hamiltonowskie Podsumowanie
 2: Drogi i Cykle Spis Zagadnie«drogi i cykle spójno± w tym sªaba i silna k-spójno± (wierzchoªkowa i kraw dziowa) dekompozycja grafu na bloki odlegªo±ci w grae i poj cia pochodne grafy Eulera i Hamiltona
2: Drogi i Cykle Spis Zagadnie«drogi i cykle spójno± w tym sªaba i silna k-spójno± (wierzchoªkowa i kraw dziowa) dekompozycja grafu na bloki odlegªo±ci w grae i poj cia pochodne grafy Eulera i Hamiltona
Pochodna funkcji jednej zmiennej
 Pochodna funkcji jednej zmiennej Denicja. (pochodnej funkcji w punkcie) Je±li funkcja f : D R, D R okre±lona jest w pewnym otoczeniu punktu D i istnieje sko«czona granica ilorazu ró»niczkowego: f f( +
Pochodna funkcji jednej zmiennej Denicja. (pochodnej funkcji w punkcie) Je±li funkcja f : D R, D R okre±lona jest w pewnym otoczeniu punktu D i istnieje sko«czona granica ilorazu ró»niczkowego: f f( +
Kurs z matematyki - zadania
 Kurs z matematyki - zadania Miara łukowa kąta Zadanie Miary kątów wyrażone w stopniach zapisać w radianach: a) 0, b) 80, c) 90, d), e) 0, f) 0, g) 0, h), i) 0, j) 70, k), l) 80, m) 080, n), o) 0 Zadanie
Kurs z matematyki - zadania Miara łukowa kąta Zadanie Miary kątów wyrażone w stopniach zapisać w radianach: a) 0, b) 80, c) 90, d), e) 0, f) 0, g) 0, h), i) 0, j) 70, k), l) 80, m) 080, n), o) 0 Zadanie
PRZYK ADOWY ARKUSZ EGZAMINACYJNY Z MATEMATYKI
 PRZYK ADOWY ARKUSZ EGZAMINACYJNY Z MATEMATYKI Zestaw P POZIOM PODSTAWOWY Czas pracy 170 minut Instrukcja dla pisz cego 1. Sprawd, czy arkusz zawiera 17 stron.. W zadaniach od 1. do 0. s podane 4 odpowiedzi:
PRZYK ADOWY ARKUSZ EGZAMINACYJNY Z MATEMATYKI Zestaw P POZIOM PODSTAWOWY Czas pracy 170 minut Instrukcja dla pisz cego 1. Sprawd, czy arkusz zawiera 17 stron.. W zadaniach od 1. do 0. s podane 4 odpowiedzi:
Wojewódzki Konkurs Matematyczny
 sumaryczna liczba punktów (wypeªnia sprawdzaj cy) Wojewódzki Konkurs Matematyczny dla uczniów gimnazjów 13 luty 2014 Czas 90 minut 1. Otrzymujesz do rozwi zania 10 zada«zamkni tych oraz 5 zada«otwartych.
sumaryczna liczba punktów (wypeªnia sprawdzaj cy) Wojewódzki Konkurs Matematyczny dla uczniów gimnazjów 13 luty 2014 Czas 90 minut 1. Otrzymujesz do rozwi zania 10 zada«zamkni tych oraz 5 zada«otwartych.
ARYTMETYKA MODULARNA. Grzegorz Szkibiel. Wiosna 2014/15
 ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
PRZYK ADOWY ARKUSZ EGZAMINACYJNY Z MATEMATYKI
 PRZYK ADOWY ARKUSZ EGZAMINACYJNY Z MATEMATYKI Zestaw P POZIOM PODSTAWOWY Czas pracy 170 minut Instrukcja dla pisz cego 1. Sprawd, czy arkusz zawiera 17 stron.. W zadaniach od 1. do 0. s podane 4 odpowiedzi:
PRZYK ADOWY ARKUSZ EGZAMINACYJNY Z MATEMATYKI Zestaw P POZIOM PODSTAWOWY Czas pracy 170 minut Instrukcja dla pisz cego 1. Sprawd, czy arkusz zawiera 17 stron.. W zadaniach od 1. do 0. s podane 4 odpowiedzi:
Teoria grafów i jej zastosowania. 1 / 126
 Teoria grafów i jej zastosowania. 1 / 126 Mosty królewieckie W Królewcu, na rzece Pregole znajduj si dwie wyspy poª czone ze sob, a tak»e z brzegami za pomoc siedmiu mostów, tak jak pokazuje rysunek 2
Teoria grafów i jej zastosowania. 1 / 126 Mosty królewieckie W Królewcu, na rzece Pregole znajduj si dwie wyspy poª czone ze sob, a tak»e z brzegami za pomoc siedmiu mostów, tak jak pokazuje rysunek 2
Algorytmy grafowe 2. Andrzej Jastrz bski. Akademia ETI. Politechnika Gda«ska Algorytmy grafowe 2
 Algorytmy grafowe 2 Andrzej Jastrz bski Akademia ETI Minimalne drzewo spinaj ce Drzewem nazywamy spójny graf nie posiadaj cy cyklu. Liczba wierzchoªków drzewa jest o jeden wi ksza od liczby jego kraw dzi.
Algorytmy grafowe 2 Andrzej Jastrz bski Akademia ETI Minimalne drzewo spinaj ce Drzewem nazywamy spójny graf nie posiadaj cy cyklu. Liczba wierzchoªków drzewa jest o jeden wi ksza od liczby jego kraw dzi.
Arkusz maturalny. Šukasz Dawidowski. 25 kwietnia 2016r. Powtórki maturalne
 Arkusz maturalny Šukasz Dawidowski Powtórki maturalne 25 kwietnia 2016r. W pewnym sonda»u partia A uzyskaªa o 8 punktów procentowych wi ksze poparcie ni» partia B. Wiadomo,»e liczba gªosów oddanych w sonda»u
Arkusz maturalny Šukasz Dawidowski Powtórki maturalne 25 kwietnia 2016r. W pewnym sonda»u partia A uzyskaªa o 8 punktów procentowych wi ksze poparcie ni» partia B. Wiadomo,»e liczba gªosów oddanych w sonda»u
ZADANIA ZAMKNI TE. W zadaniach od 1. do 20. wybierz i zaznacz na karcie odpowiedzi jedn poprawn odpowied.
 2 Przyk adowy arkusz egzaminacyjny z matematyki ZADANIA ZAMKNI TE W zadaniach od 1. do 20. wybierz i zaznacz na karcie odpowiedzi jedn poprawn odpowied. Zadanie 1. (1 pkt) Pole powierzchni ca kowitej sze
2 Przyk adowy arkusz egzaminacyjny z matematyki ZADANIA ZAMKNI TE W zadaniach od 1. do 20. wybierz i zaznacz na karcie odpowiedzi jedn poprawn odpowied. Zadanie 1. (1 pkt) Pole powierzchni ca kowitej sze
Wektor. Uporz dkowany ukªad liczb (najcz ±ciej: dwóch - na pªaszczy¹nie, trzech - w przestrzeni 3D).
.") Wektor Uporz dkowany ukªad liczb (najcz ±ciej: dwóch - na pªaszczy¹nie, trzech - w przestrzeni 3D). Adam Szmagli«ski (IF PK) Wykªad z Fizyki dla I roku WIL Kraków, 10.10.2015 1 / 13 Wektor Uporz dkowany
Wektor Uporz dkowany ukªad liczb (najcz ±ciej: dwóch - na pªaszczy¹nie, trzech - w przestrzeni 3D). Adam Szmagli«ski (IF PK) Wykªad z Fizyki dla I roku WIL Kraków, 10.10.2015 1 / 13 Wektor Uporz dkowany
Zadania z analizy matematycznej - sem. II Ekstrema funkcji wielu zmiennych, twierdzenia o funkcji odwrotnej i funkcji uwikªanej
 Zadania z analizy matematycznej - sem. II Ekstrema funkcji wielu zmiennych, twierdzenia o funkcji odwrotnej i funkcji uwikªanej Denicja 1. Niech X = R n b dzie przestrzeni unormowan oraz d(x, y) = x y.
Zadania z analizy matematycznej - sem. II Ekstrema funkcji wielu zmiennych, twierdzenia o funkcji odwrotnej i funkcji uwikªanej Denicja 1. Niech X = R n b dzie przestrzeni unormowan oraz d(x, y) = x y.
ARYTMETYKA MODULARNA. Grzegorz Szkibiel. Wiosna 2014/15
 ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
Rozdziaª 13. Przykªadowe projekty zaliczeniowe
 Rozdziaª 13 Przykªadowe projekty zaliczeniowe W tej cz ±ci skryptu przedstawimy przykªady projektów na zaliczenia zaj z laboratorium komputerowego z matematyki obliczeniowej. Projekty mo»na potraktowa
Rozdziaª 13 Przykªadowe projekty zaliczeniowe W tej cz ±ci skryptu przedstawimy przykªady projektów na zaliczenia zaj z laboratorium komputerowego z matematyki obliczeniowej. Projekty mo»na potraktowa
. 0 0... 1 0. 0 0 0 0 1 gdzie wektory α i tworz baz ortonormaln przestrzeni E n
 GAL II 2013-2014 A. Strojnowski str.45 Wykªad 20 Denicja 20.1 Przeksztaªcenie aniczne f : H H anicznej przestrzeni euklidesowej nazywamy izometri gdy przeksztaªcenie pochodne f : T (H) T (H) jest izometri
GAL II 2013-2014 A. Strojnowski str.45 Wykªad 20 Denicja 20.1 Przeksztaªcenie aniczne f : H H anicznej przestrzeni euklidesowej nazywamy izometri gdy przeksztaªcenie pochodne f : T (H) T (H) jest izometri
Równania ró»niczkowe I rz du (RRIR) Twierdzenie Picarda. Anna D browska. WFTiMS. 23 marca 2010
 Twierdzenie Picarda. Anna D browska. WFTiMS. 23 marca 2010") WFTiMS 23 marca 2010 Spis tre±ci 1 Denicja 1 (równanie ró»niczkowe pierwszego rz du) Równanie y = f (t, y) (1) nazywamy równaniem ró»niczkowym zwyczajnym pierwszego rz du w postaci normalnej. Uwaga 1 Ogólna
WFTiMS 23 marca 2010 Spis tre±ci 1 Denicja 1 (równanie ró»niczkowe pierwszego rz du) Równanie y = f (t, y) (1) nazywamy równaniem ró»niczkowym zwyczajnym pierwszego rz du w postaci normalnej. Uwaga 1 Ogólna
det A := a 11, ( 1) 1+j a 1j det A 1j, a 11 a 12 a 21 a 22 Wn. 1 (Wyznacznik macierzy stopnia 2:). = a 11a 22 a 33 +a 12 a 23 a 31 +a 13 a 21 a 32
 1+j a 1j det A 1j, a 11 a 12 a 21 a 22 Wn. 1 (Wyznacznik macierzy stopnia 2:). = a 11a 22 a 33 +a 12 a 23 a 31 +a 13 a 21 a 32") Wyznacznik Def Wyznacznikiem macierzy kwadratowej nazywamy funkcj, która ka»dej macierzy A = (a ij ) przyporz dkowuje liczb det A zgodnie z nast puj cym schematem indukcyjnym: Dla macierzy A = (a ) stopnia
Wyznacznik Def Wyznacznikiem macierzy kwadratowej nazywamy funkcj, która ka»dej macierzy A = (a ij ) przyporz dkowuje liczb det A zgodnie z nast puj cym schematem indukcyjnym: Dla macierzy A = (a ) stopnia
WST P DO TEORII INFORMACJI I KODOWANIA. Grzegorz Szkibiel. Wiosna 2013/14
 WST P DO TEORII INFORMACJI I KODOWANIA Grzegorz Szkibiel Wiosna 203/4 Spis tre±ci Kodowanie i dekodowanie 4. Kodowanie a szyfrowanie..................... 4.2 Podstawowe poj cia........................
WST P DO TEORII INFORMACJI I KODOWANIA Grzegorz Szkibiel Wiosna 203/4 Spis tre±ci Kodowanie i dekodowanie 4. Kodowanie a szyfrowanie..................... 4.2 Podstawowe poj cia........................
Macierze i Wyznaczniki
 Macierze i Wyznaczniki Kilka wzorów i informacji pomocniczych: Denicja 1. Tablic nast puj cej postaci a 11 a 12... a 1n a 21 a 22... a 2n A =... a m1 a m2... a mn nazywamy macierz o m wierszach i n kolumnach,
Macierze i Wyznaczniki Kilka wzorów i informacji pomocniczych: Denicja 1. Tablic nast puj cej postaci a 11 a 12... a 1n a 21 a 22... a 2n A =... a m1 a m2... a mn nazywamy macierz o m wierszach i n kolumnach,
Interpolacja Lagrange'a, bazy wielomianów
 Rozdziaª 4 Interpolacja Lagrange'a, bazy wielomianów W tym rozdziale zajmiemy si interpolacj wielomianow. Zadanie interpolacji wielomianowej polega na znalezieniu wielomianu stopnia nie wi kszego od n,
Rozdziaª 4 Interpolacja Lagrange'a, bazy wielomianów W tym rozdziale zajmiemy si interpolacj wielomianow. Zadanie interpolacji wielomianowej polega na znalezieniu wielomianu stopnia nie wi kszego od n,
Co i czym mo»na skonstruowa
 Co i czym mo»na skonstruowa Jarosªaw Kosiorek 5 maja 016 Co mo»na skonstruowa? Maj c dany odcinek dªugo±ci 1 mo»na skonstruowa : 1. odcinek dªugo±ci równej dowolnej liczbie wymiernej dodatniej;. odcinek
Co i czym mo»na skonstruowa Jarosªaw Kosiorek 5 maja 016 Co mo»na skonstruowa? Maj c dany odcinek dªugo±ci 1 mo»na skonstruowa : 1. odcinek dªugo±ci równej dowolnej liczbie wymiernej dodatniej;. odcinek
Aproksymacja funkcji metod najmniejszych kwadratów
 Aproksymacja funkcji metod najmniejszych kwadratów Teoria Interpolacja polega na znajdowaniu krzywej przechodz cej przez wszystkie w zªy. Zdarzaj si jednak sytuacje, w których dane te mog by obarczone
Aproksymacja funkcji metod najmniejszych kwadratów Teoria Interpolacja polega na znajdowaniu krzywej przechodz cej przez wszystkie w zªy. Zdarzaj si jednak sytuacje, w których dane te mog by obarczone
Twierdzenie Wainera. Marek Czarnecki. Warszawa, 3 lipca Wydziaª Filozoi i Socjologii Uniwersytet Warszawski
 Twierdzenie Wainera Marek Czarnecki Wydziaª Filozoi i Socjologii Uniwersytet Warszawski Wydziaª Matematyki, Informatyki i Mechaniki Uniwersytet Warszawski Warszawa, 3 lipca 2009 Motywacje Dla dowolnej
Twierdzenie Wainera Marek Czarnecki Wydziaª Filozoi i Socjologii Uniwersytet Warszawski Wydziaª Matematyki, Informatyki i Mechaniki Uniwersytet Warszawski Warszawa, 3 lipca 2009 Motywacje Dla dowolnej
1 Ró»niczka drugiego rz du i ekstrema
 Plan Spis tre±ci 1 Pochodna cz stkowa 1 1.1 Denicja................................ 1 1.2 Przykªady............................... 2 1.3 Wªasno±ci............................... 2 1.4 Pochodne wy»szych
Plan Spis tre±ci 1 Pochodna cz stkowa 1 1.1 Denicja................................ 1 1.2 Przykªady............................... 2 1.3 Wªasno±ci............................... 2 1.4 Pochodne wy»szych
Metody dowodzenia twierdze«
 Metody dowodzenia twierdze«1 Metoda indukcji matematycznej Je±li T (n) jest form zdaniow okre±lon w zbiorze liczb naturalnych, to prawdziwe jest zdanie (T (0) n N (T (n) T (n + 1))) n N T (n). 2 W przypadku
Metody dowodzenia twierdze«1 Metoda indukcji matematycznej Je±li T (n) jest form zdaniow okre±lon w zbiorze liczb naturalnych, to prawdziwe jest zdanie (T (0) n N (T (n) T (n + 1))) n N T (n). 2 W przypadku
Egzamin maturalny z matematyki Poziom podstawowy ZADANIA ZAMKNI TE. W zadaniach od 1. do 25. wybierz i zaznacz na karcie odpowiedzi poprawn odpowied.
 Egzamin maturalny z matematyki ZADANIA ZAMKNI TE W zadaniach od 1. do 5. wybierz i zaznacz na karcie odpowiedzi poprawn odpowied. Zadanie 1. (1 pkt) Cen nart obni ono o 0%, a po miesi cu now cen obni ono
Egzamin maturalny z matematyki ZADANIA ZAMKNI TE W zadaniach od 1. do 5. wybierz i zaznacz na karcie odpowiedzi poprawn odpowied. Zadanie 1. (1 pkt) Cen nart obni ono o 0%, a po miesi cu now cen obni ono
LZNK. Rozkªad QR. Metoda Householdera
 Rozdziaª 10 LZNK. Rozªad QR. Metoda Householdera W tym rozdziale zajmiemy si liniowym zadaniem najmniejszych wadratów (LZNK). Dla danej macierzy A wymiaru M N i wetora b wymiaru M chcemy znale¹ wetor x
Rozdziaª 10 LZNK. Rozªad QR. Metoda Householdera W tym rozdziale zajmiemy si liniowym zadaniem najmniejszych wadratów (LZNK). Dla danej macierzy A wymiaru M N i wetora b wymiaru M chcemy znale¹ wetor x
Interpolacja funkcjami sklejanymi
 Interpolacja funkcjami sklejanymi Funkcje sklejane: Zaªó»my,»e mamy n + 1 w zªów t 0, t 1,, t n takich,»e t 0 < t 1 < < t n Dla danej liczby caªkowitej, nieujemnej k funkcj sklejan stopnia k nazywamy tak
Interpolacja funkcjami sklejanymi Funkcje sklejane: Zaªó»my,»e mamy n + 1 w zªów t 0, t 1,, t n takich,»e t 0 < t 1 < < t n Dla danej liczby caªkowitej, nieujemnej k funkcj sklejan stopnia k nazywamy tak
1 Trochoidalny selektor elektronów
 1 Trochoidalny selektor elektronów W trochoidalnym selektorze elektronów TEM (Trochoidal Electron Monochromator) stosuje si skrzy»owane i jednorodne pola: elektryczne i magnetyczne. Jako pierwsi taki ukªad
1 Trochoidalny selektor elektronów W trochoidalnym selektorze elektronów TEM (Trochoidal Electron Monochromator) stosuje si skrzy»owane i jednorodne pola: elektryczne i magnetyczne. Jako pierwsi taki ukªad
PAKIET MathCad - Część III
 Opracowanie: Anna Kluźniak / Jadwiga Matla Ćw3.mcd 1/12 Katedra Informatyki Stosowanej - Studium Podstaw Informatyki PAKIET MathCad - Część III RÓWNANIA I UKŁADY RÓWNAŃ 1. Równania z jedną niewiadomą MathCad
Opracowanie: Anna Kluźniak / Jadwiga Matla Ćw3.mcd 1/12 Katedra Informatyki Stosowanej - Studium Podstaw Informatyki PAKIET MathCad - Część III RÓWNANIA I UKŁADY RÓWNAŃ 1. Równania z jedną niewiadomą MathCad
Funkcja kwadratowa, wielomiany oraz funkcje wymierne
 Funkcja kwadratowa, wielomiany oraz funkcje wymierne Šukasz Dawidowski Nocne powtórki maturalne 28 kwietnia 2014 r. Troch teorii Funkcj f : R R dan wzorem: f (x) = ax 2 + bx + c gdzie a 0 nazywamy funkcj
Funkcja kwadratowa, wielomiany oraz funkcje wymierne Šukasz Dawidowski Nocne powtórki maturalne 28 kwietnia 2014 r. Troch teorii Funkcj f : R R dan wzorem: f (x) = ax 2 + bx + c gdzie a 0 nazywamy funkcj
Przetwarzanie sygnaªów
 Przetwarzanie sygnaªów Wykªad 8 - Wst p do obrazów 2D Marcin Wo¹niak, Dawid Poªap Przetwarzanie sygnaªów Pa¹dziernik, 2018 1 / 27 Plan wykªadu 1 Informacje wstepne 2 Przetwarzanie obrazu 3 Wizja komputerowa
Przetwarzanie sygnaªów Wykªad 8 - Wst p do obrazów 2D Marcin Wo¹niak, Dawid Poªap Przetwarzanie sygnaªów Pa¹dziernik, 2018 1 / 27 Plan wykªadu 1 Informacje wstepne 2 Przetwarzanie obrazu 3 Wizja komputerowa
2 Liczby rzeczywiste - cz. 2
 2 Liczby rzeczywiste - cz. 2 W tej lekcji omówimy pozostaªe tematy zwi zane z liczbami rzeczywistymi. 2. Przedziaªy liczbowe Wyró»niamy nast puj ce rodzaje przedziaªów liczbowych: (a) przedziaªy ograniczone:
2 Liczby rzeczywiste - cz. 2 W tej lekcji omówimy pozostaªe tematy zwi zane z liczbami rzeczywistymi. 2. Przedziaªy liczbowe Wyró»niamy nast puj ce rodzaje przedziaªów liczbowych: (a) przedziaªy ograniczone:
1 Metody iteracyjne rozwi zywania równania f(x)=0
=0") 1 Metody iteracyjne rozwi zywania równania f()=0 1.1 Metoda bisekcji Zaªó»my,»e funkcja f jest ci gªa w [a 0, b 0 ]. Pierwiastek jest w przedziale [a 0, b 0 ] gdy f(a 0 )f(b 0 ) < 0. (1) Ustalmy f(a 0
1 Metody iteracyjne rozwi zywania równania f()=0 1.1 Metoda bisekcji Zaªó»my,»e funkcja f jest ci gªa w [a 0, b 0 ]. Pierwiastek jest w przedziale [a 0, b 0 ] gdy f(a 0 )f(b 0 ) < 0. (1) Ustalmy f(a 0
Kinematyka 2/15. Andrzej Kapanowski ufkapano/ Instytut Fizyki, Uniwersytet Jagiello«ski, Kraków. A. Kapanowski Kinematyka
 Kinematyka 2/15 Andrzej Kapanowski http://users.uj.edu.pl/ ufkapano/ Instytut Fizyki, Uniwersytet Jagiello«ski, Kraków 2018 Podstawowe poj cia Kinematyka jest cz ±ci mechaniki, która zajmuje si opisem
Kinematyka 2/15 Andrzej Kapanowski http://users.uj.edu.pl/ ufkapano/ Instytut Fizyki, Uniwersytet Jagiello«ski, Kraków 2018 Podstawowe poj cia Kinematyka jest cz ±ci mechaniki, która zajmuje si opisem
Caªkowanie numeryczne - porównanie skuteczno±ci metody prostokatów, metody trapezów oraz metody Simpsona
 Akademia Górniczo-Hutnicza im. Stanisªawa Staszica w Krakowie Wydziaª Fizyki i Informatyki Stosowanej Krzysztof Grz dziel kierunek studiów: informatyka stosowana Caªkowanie numeryczne - porównanie skuteczno±ci
Akademia Górniczo-Hutnicza im. Stanisªawa Staszica w Krakowie Wydziaª Fizyki i Informatyki Stosowanej Krzysztof Grz dziel kierunek studiów: informatyka stosowana Caªkowanie numeryczne - porównanie skuteczno±ci
Liniowe równania ró»niczkowe n tego rz du o staªych wspóªczynnikach
 Liniowe równania ró»niczkowe n tego rz du o staªych wspóªczynnikach Teoria obowi zuje z wykªadu, dlatego te» zostan tutaj przedstawione tylko podstawowe denicje, twierdzenia i wzory. Denicja 1. Równanie
Liniowe równania ró»niczkowe n tego rz du o staªych wspóªczynnikach Teoria obowi zuje z wykªadu, dlatego te» zostan tutaj przedstawione tylko podstawowe denicje, twierdzenia i wzory. Denicja 1. Równanie
Zad. 1 Zad. 2 Zad. 3 Zad. 4 Zad. 5 SUMA. W obu podpunktach zakªadamy,»e kolejno± ta«ców jest wa»na.
 Zad. 1 Zad. 2 Zad. 3 Zad. 4 Zad. 5 SUMA Zadanko 1 (12p.) Na imprezie w Noc Kupaªy s 44 dziewczyny. Nosz one 11 ró»nych imion, a dla ka»dego imienia s dokªadnie 4 dziewczyny o tym imieniu przy czym ka»da
Zad. 1 Zad. 2 Zad. 3 Zad. 4 Zad. 5 SUMA Zadanko 1 (12p.) Na imprezie w Noc Kupaªy s 44 dziewczyny. Nosz one 11 ró»nych imion, a dla ka»dego imienia s dokªadnie 4 dziewczyny o tym imieniu przy czym ka»da
Zagadnienia na wej±ciówki z matematyki Technologia Chemiczna
 Zagadnienia na wej±ciówki z matematyki Technologia Chemiczna 1. Podaj denicj liczby zespolonej. 2. Jak obliczy sum /iloczyn dwóch liczb zespolonych w postaci algebraicznej? 3. Co to jest liczba urojona?
Zagadnienia na wej±ciówki z matematyki Technologia Chemiczna 1. Podaj denicj liczby zespolonej. 2. Jak obliczy sum /iloczyn dwóch liczb zespolonych w postaci algebraicznej? 3. Co to jest liczba urojona?
I Rok LOGISTYKI: wykªad 2 Pochodna funkcji. iloraz ró»nicowy x y x
 I Rok LOGISTYKI: wykªad 2 Pochodna funkcji Niech f jest okre±lona w Q(x 0, δ) i x Q(x 0, δ). Oznaczenia: x = x x 0 y = y y 0 = f(x 0 + x) f(x 0 ) y x = f(x 0 + x) f(x 0 ) iloraz ró»nicowy x y x = tgβ,
I Rok LOGISTYKI: wykªad 2 Pochodna funkcji Niech f jest okre±lona w Q(x 0, δ) i x Q(x 0, δ). Oznaczenia: x = x x 0 y = y y 0 = f(x 0 + x) f(x 0 ) y x = f(x 0 + x) f(x 0 ) iloraz ró»nicowy x y x = tgβ,
GRK 4. dr Wojciech Palubicki
 GRK 4 dr Wojciech Palubicki Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space Projection
GRK 4 dr Wojciech Palubicki Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space Projection
Algebra liniowa z geometria. - zadania Rok akademicki 2010/2011
 1 GEOMETRIA ANALITYCZNA 1 Wydział Fizyki Algebra liniowa z geometria - zadania Rok akademicki 2010/2011 Agata Pilitowska i Zbigniew Dudek 1 Geometria analityczna 1.1 Punkty i wektory 1. Sprawdzić, czy
1 GEOMETRIA ANALITYCZNA 1 Wydział Fizyki Algebra liniowa z geometria - zadania Rok akademicki 2010/2011 Agata Pilitowska i Zbigniew Dudek 1 Geometria analityczna 1.1 Punkty i wektory 1. Sprawdzić, czy