Regulator liniowo kwadratowy na przykładzie wahadła odwróconego
|
|
|
- Anna Bednarczyk
- 8 lat temu
- Przeglądów:
Transkrypt
1 Regulator liniowo kwadratowy na przykładzie wahadła odwróconego kwiecień 2012
2 Sterowanie Teoria Przykład wahadła na wózku
3 Dany jest system dynamiczny postaci: ẋ = f (x, u) (1) y = h(x) (2) Naszym zadaniem jest wyznaczyć takie u(t), by układ znalazł się w pożądanym stanie x r. Układ regulacji nadążnej - x r (t) jest nieznaną z góry funkcją czasu.
4 Wyzwania:
5 Wyzwania: szum w układzie - sprzężenie zwrotne (zamknięty system regulacji)
6 Wyzwania: szum w układzie - sprzężenie zwrotne (zamknięty system regulacji) szum w pomiarach - filtracja (np. filtr Kalmana)
7 Wyzwania: szum w układzie - sprzężenie zwrotne (zamknięty system regulacji) szum w pomiarach - filtracja (np. filtr Kalmana) niepełna informacja o stanie - obserwatory (np. obserwator Luenbergera)
8 Wyzwania: szum w układzie - sprzężenie zwrotne (zamknięty system regulacji) szum w pomiarach - filtracja (np. filtr Kalmana) niepełna informacja o stanie - obserwatory (np. obserwator Luenbergera) optymalizacja sprzężenia zwrotnego -
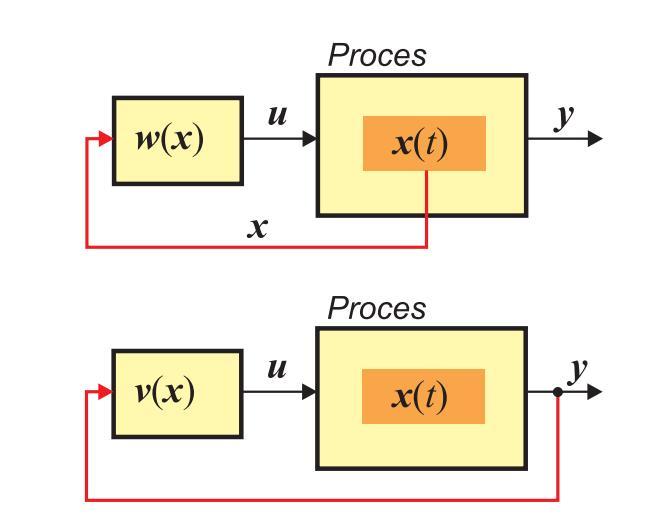
9 Sprzężenie zwrotne Sprzężeniem od stanu nazywamy realizację sygnału sterującego według następującej formuły: u = w(x) (3) Sprzężeniem od wyjścia nazywamy realizację sygnału sterującego według następującej formuły: u = v(y) (4)
10
11 Dany jest liniowy system ciągły opisywany równaniem: ẋ = Ax + Bu (5) Optymalizujemy całkowy, kwadratowy wskaźnik jakości: J = dt (x T Qx + u T Ru) (6) 0 Q jest dodatnio półokreślona, R dodatnio określona.
12 Rozwiązanie: u = Kx (7) K = R 1 B T P (8) Macierz P należy wyznaczyć z algebraicznego równania Riccatiego: A T P + PA PBR 1 B T P + Q = 0; (9)
13 Metody wyprowadzenia: Mnożniki Lagrange a + rachunek wariacyjny Programowanie dynamiczne

14 Równania ruchu i linearyzacja Klasyczny przykład zastosowania - wahadło odwrócone
15 Równania ruchu i linearyzacja Lagranżian L = M + m ẋ 2 + ml α2 + ml αẋ cos α + mgl cos α (10) Stąd otrzymujemy równania: { (M + m)ẍ + ml α cos α = ml α 2 sin α + u cos αẍ + l α = g sin α (11)
16 Równania ruchu i linearyzacja Kładziemy dla prostoty M = m = g = l = 1 i rozwiązujemy liniowy układ równań algebraicznych względem drugich pochodnych: { ẍ = 1 2 cos 2 α (u + α2 sin α + sin α cos α) α = 1 (12) (u cos α + α sin α cos α + 2 sin α) 2 cos 2 α
17 Równania ruchu i linearyzacja Kładziemy dla prostoty M = m = g = l = 1 i rozwiązujemy liniowy układ równań algebraicznych względem drugich pochodnych: { ẍ = 1 2 cos 2 α (u + α2 sin α + sin α cos α) α = 1 (12) (u cos α + α sin α cos α + 2 sin α) 2 cos 2 α System dynamiczny nieliniowy!
18 Równania ruchu i linearyzacja Zapisujemy w postaci czterowymiarowej i linearyzujemy w górnym punkcie równowagi: ẋ v φ ω = x v φ ω +u (13) Na podstawie tak wyznaczonych macierzy A i B obliczamy macierz (w naszym wypadku wektor) regulatora proporcjonalnego K
19 Równania ruchu i linearyzacja Parametry regulatora wyznaczone ręcznie :
20 Równania ruchu i linearyzacja Parametry regulatora wyznaczone ręcznie :
21 Równania ruchu i linearyzacja Parametry regulatora wyznaczone ręcznie :
22 Równania ruchu i linearyzacja :
23 Równania ruchu i linearyzacja :
24 Równania ruchu i linearyzacja :
25 Równania ruchu i linearyzacja Baseny atrakcji:

26 Równania ruchu i linearyzacja Baseny atrakcji:
27 Równania ruchu i linearyzacja Baseny atrakcji:
28 Literatura: [1] H. Górecki; Optymalizacja i sterowanie systemów dynamicznych (2006, ISBN ) [2] Stephen Boyd, lecture slides (
Sterowanie optymalne
 Sterowanie optymalne Sterowanie Procesami Ciągłymi 2017 Optymalizacja statyczna funkcji Funkcja celu/kryterialna/kosztów Ograniczenie Q(x) min x x = arg min Q(x) x x X, gdzie X zbiór rozwiązań dopuszczalnych
Sterowanie optymalne Sterowanie Procesami Ciągłymi 2017 Optymalizacja statyczna funkcji Funkcja celu/kryterialna/kosztów Ograniczenie Q(x) min x x = arg min Q(x) x x X, gdzie X zbiór rozwiązań dopuszczalnych
Modelowanie układów dynamicznych
 Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 11 Równania Eulera-Lagrange a Rozważmy układ p punktów materialnych o współrzędnych uogólnionych q i i zdefiniujmy lagranżian
Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 11 Równania Eulera-Lagrange a Rozważmy układ p punktów materialnych o współrzędnych uogólnionych q i i zdefiniujmy lagranżian
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Inżynieria Systemów Dynamicznych (4)
") Inżynieria Systemów Dynamicznych (4) liniowych (układów) Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 2 WE OKREŚLO 3 ASYMPTO 4 DYNAMICZ
Inżynieria Systemów Dynamicznych (4) liniowych (układów) Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 2 WE OKREŚLO 3 ASYMPTO 4 DYNAMICZ
Sterowanie napędów maszyn i robotów
 Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Równania różniczkowe liniowe wyższych rzędów o stałych współcz
 Równania różniczkowe liniowe wyższych rzędów o stałych współczynnikach Katedra Matematyki i Ekonomii Matematycznej SGH 12 maja 2016 Równanie liniowe n-tego rzędu Definicja Równaniem różniczkowym liniowym
Równania różniczkowe liniowe wyższych rzędów o stałych współczynnikach Katedra Matematyki i Ekonomii Matematycznej SGH 12 maja 2016 Równanie liniowe n-tego rzędu Definicja Równaniem różniczkowym liniowym
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Metody Lagrange a i Hamiltona w Mechanice
 Metody Lagrange a i Hamiltona w Mechanice Mariusz Przybycień Wydział Fizyki i Informatyki Stosowanej Akademia Górniczo-Hutnicza Wykład 8 M. Przybycień (WFiIS AGH) Metody Lagrange a i Hamiltona... Wykład
Metody Lagrange a i Hamiltona w Mechanice Mariusz Przybycień Wydział Fizyki i Informatyki Stosowanej Akademia Górniczo-Hutnicza Wykład 8 M. Przybycień (WFiIS AGH) Metody Lagrange a i Hamiltona... Wykład
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Opis systemów dynamicznych w przestrzeni stanu. Wojciech Kurek , Gdańsk
 Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Wykład 3 Równania rózniczkowe cd
 7 grudnia 2010 Definicja Równanie różniczkowe dy dx + p (x) y = q (x) (1) nazywamy równaniem różniczkowym liniowym pierwszego rzędu. Jeśli q (x) 0, to równanie (1) czyli równanie dy dx + p (x) y = 0 nazywamy
7 grudnia 2010 Definicja Równanie różniczkowe dy dx + p (x) y = q (x) (1) nazywamy równaniem różniczkowym liniowym pierwszego rzędu. Jeśli q (x) 0, to równanie (1) czyli równanie dy dx + p (x) y = 0 nazywamy
Dynamika manipulatora. Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska. Podstawy robotyki wykład VI
 Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu w postaci
Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu w postaci
Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym
 Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym Sprowadzanie zadań sterowania optymalnego do zadań wariacyjnych metod a funkcji kary i mnożników Lagrange a - zadania sterowania optymalnego
Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym Sprowadzanie zadań sterowania optymalnego do zadań wariacyjnych metod a funkcji kary i mnożników Lagrange a - zadania sterowania optymalnego
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym
 Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym Sprowadzanie zadań sterowania optymalnego do zadań wariacyjnych metod a funkcji kary i mnożników Lagrange a - zadania sterowania optymalnego
Mnożniki funkcyjne Lagrange a i funkcje kary w sterowaniu optymalnym Sprowadzanie zadań sterowania optymalnego do zadań wariacyjnych metod a funkcji kary i mnożników Lagrange a - zadania sterowania optymalnego
5 Równania różniczkowe zwyczajne rzędu drugiego
 5 Równania różniczkowe zwyczajne rzędu drugiego Definicja 5.1. Równaniem różniczkowym zwyczajnym rzędu drugiego nazywamy równanie postaci F ( x, y, y, y ) = 0, (12) w którym niewiadomą jest funkcja y =
5 Równania różniczkowe zwyczajne rzędu drugiego Definicja 5.1. Równaniem różniczkowym zwyczajnym rzędu drugiego nazywamy równanie postaci F ( x, y, y, y ) = 0, (12) w którym niewiadomą jest funkcja y =
Metoda Karusha-Kuhna-Tuckera
 Badania operacyjne i teoria optymalizacji Poznań, 2015/2016 Plan 1 Sformułowanie problemu 2 3 Warunki ortogonalności 4 Warunki Karusha-Kuhna-Tuckera 5 Twierdzenia Karusha-Kuhna-Tuckera 6 Ograniczenia w
Badania operacyjne i teoria optymalizacji Poznań, 2015/2016 Plan 1 Sformułowanie problemu 2 3 Warunki ortogonalności 4 Warunki Karusha-Kuhna-Tuckera 5 Twierdzenia Karusha-Kuhna-Tuckera 6 Ograniczenia w
WIELOMIANY. ZADANIE 1 (5 PKT) Reszta z dzielenia wielomianu x 3 + px 2 x + q przez trójmian (x + 2) 2 wynosi 1 x. Wyznacz pierwiastki tego wielomianu.
 Reszta z dzielenia wielomianu x 3 + px 2 x + q przez trójmian (x + 2) 2 wynosi 1 x. Wyznacz pierwiastki tego wielomianu.") IMIE I NAZWISKO WIELOMIANY SUMA PUNKTÓW: 125 ZADANIE 1 (5 PKT) Reszta z dzielenia wielomianu x 3 + px 2 x + q przez trójmian (x + 2) 2 wynosi 1 x. Wyznacz pierwiastki tego wielomianu. ZADANIE 2 (5 PKT)
IMIE I NAZWISKO WIELOMIANY SUMA PUNKTÓW: 125 ZADANIE 1 (5 PKT) Reszta z dzielenia wielomianu x 3 + px 2 x + q przez trójmian (x + 2) 2 wynosi 1 x. Wyznacz pierwiastki tego wielomianu. ZADANIE 2 (5 PKT)
Równania różniczkowe liniowe rzędu pierwszego
 Katedra Matematyki i Ekonomii Matematycznej SGH 21 kwietnia 2016 Wstęp Definicja Równanie różniczkowe + p (x) y = q (x) (1) nazywamy równaniem różniczkowym liniowym pierwszego rzędu. Jeśli q (x) 0, to
Katedra Matematyki i Ekonomii Matematycznej SGH 21 kwietnia 2016 Wstęp Definicja Równanie różniczkowe + p (x) y = q (x) (1) nazywamy równaniem różniczkowym liniowym pierwszego rzędu. Jeśli q (x) 0, to
Metody Optymalizacji Laboratorium nr 4 Metoda najmniejszych kwadratów
 Laboratorium Metod Optymalizacji 216 Metody Optymalizacji Laboratorium nr 4 Metoda najmniejszych kwadratów 1. Za pomocą funkcji lsqcurvefit dobrać parametry a i b funkcji: Posiadając następujące dane pomiarowe:
Laboratorium Metod Optymalizacji 216 Metody Optymalizacji Laboratorium nr 4 Metoda najmniejszych kwadratów 1. Za pomocą funkcji lsqcurvefit dobrać parametry a i b funkcji: Posiadając następujące dane pomiarowe:
DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Rys Model układu
 Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
mechanika analityczna 1 nierelatywistyczna L.D.Landau, E.M.Lifszyc Krótki kurs fizyki teoretycznej
 mechanika analityczna 1 nierelatywistyczna L.D.Landau, E.M.Lifszyc Krótki kurs fizyki teoretycznej ver-28.06.07 współrzędne uogólnione punkt materialny... wektor wodzący: prędkość: przyspieszenie: liczba
mechanika analityczna 1 nierelatywistyczna L.D.Landau, E.M.Lifszyc Krótki kurs fizyki teoretycznej ver-28.06.07 współrzędne uogólnione punkt materialny... wektor wodzący: prędkość: przyspieszenie: liczba
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 3 autorzy: A. Gonczarek, J.M. Tomczak Zbiory i funkcje wypukłe Zad. 1 Pokazać, że następujące zbiory są wypukłe: a) płaszczyzna S = {x
Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 3 autorzy: A. Gonczarek, J.M. Tomczak Zbiory i funkcje wypukłe Zad. 1 Pokazać, że następujące zbiory są wypukłe: a) płaszczyzna S = {x
Symetrie i prawa zachowania Wykład 6
 Symetrie i prawa zachowania Wykład 6 Karol Kołodziej Instytut Fizyki Uniwersytet Śląski, Katowice http://kk.us.edu.pl Karol Kołodziej Mechanika klasyczna i relatywistyczna 1/29 Rola symetrii Największym
Symetrie i prawa zachowania Wykład 6 Karol Kołodziej Instytut Fizyki Uniwersytet Śląski, Katowice http://kk.us.edu.pl Karol Kołodziej Mechanika klasyczna i relatywistyczna 1/29 Rola symetrii Największym
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Projektowanie układów metodą sprzężenia od stanu - metoda przemieszczania biegunów
 Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Laboratorium Sterowania Procesami Ciągłych Projektowanie układów metodą sprzężenia od stanu - metoda przemieszczania biegunów. Obliczanie
Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Laboratorium Sterowania Procesami Ciągłych Projektowanie układów metodą sprzężenia od stanu - metoda przemieszczania biegunów. Obliczanie
Metoda mnożników Lagrange a i jej zastosowania w ekonomii
 Maciej Grzesiak Metoda mnożników Lagrange a i jej zastosowania w ekonomii 1. Metoda mnożników Lagrange a znajdowania ekstremum warunkowego Pochodna kierunkowa i gradient. Dla prostoty ograniczymy się do
Maciej Grzesiak Metoda mnożników Lagrange a i jej zastosowania w ekonomii 1. Metoda mnożników Lagrange a znajdowania ekstremum warunkowego Pochodna kierunkowa i gradient. Dla prostoty ograniczymy się do
Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera
 Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera Arkadiusz Syta A. Syta (Politechnika Lubelska) 1 / 19 Wstęp Przegląd wybranych pakietów oprogramowania i funkcji Rozwiązywanie równań
Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera Arkadiusz Syta A. Syta (Politechnika Lubelska) 1 / 19 Wstęp Przegląd wybranych pakietów oprogramowania i funkcji Rozwiązywanie równań
RÓŻNICZKOWANIE FUNKCJI WIELU ZMIENNYCH: rachunek pochodnych dla funkcji wektorowych. Pochodne cząstkowe funkcji rzeczywistej wielu zmiennych
 RÓŻNICZKOWANIE FUNKCJI WIELU ZMIENNYCH: rachunek pochodnych dla funkcji wektorowych Pochodne cząstkowe funkcji rzeczywistej wielu zmiennych wyliczamy według wzoru (x, x 2,..., x n ) f(x, x 2,..., x n )
RÓŻNICZKOWANIE FUNKCJI WIELU ZMIENNYCH: rachunek pochodnych dla funkcji wektorowych Pochodne cząstkowe funkcji rzeczywistej wielu zmiennych wyliczamy według wzoru (x, x 2,..., x n ) f(x, x 2,..., x n )
1 Równania różniczkowe zwyczajne
 Równania różniczkowe zwyczajne wykład z MATEMATYKI Budownictwo studia niestacjonarne sem. II, rok ak. 2008/2009 Katedra Matematyki Wydział Informatyki Politechnika Białostocka Równania różniczkowe Równaniem
Równania różniczkowe zwyczajne wykład z MATEMATYKI Budownictwo studia niestacjonarne sem. II, rok ak. 2008/2009 Katedra Matematyki Wydział Informatyki Politechnika Białostocka Równania różniczkowe Równaniem
RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE. Marta Zelmańska
 RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE Marta Zelmańska Toruń 009 1 Rozdział 1 Wstęp Definicja 1. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie: F (t, x, x, x,..., x (n) ) = 0 (1.1) Rozwiązaniem równania
RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE Marta Zelmańska Toruń 009 1 Rozdział 1 Wstęp Definicja 1. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie: F (t, x, x, x,..., x (n) ) = 0 (1.1) Rozwiązaniem równania
Obserwatory stanu, zasada separowalności i regulator LQG
 Obserwatory stanu, zasada separowalności i regulator LQG Zaawansowane Techniki Sterowania Wydział Mechatroniki Politechniki Warszawskiej Anna Sztyber ZTS (IAiR PW) LQR Anna Sztyber / 29 Plan wykładu Obserwatory
Obserwatory stanu, zasada separowalności i regulator LQG Zaawansowane Techniki Sterowania Wydział Mechatroniki Politechniki Warszawskiej Anna Sztyber ZTS (IAiR PW) LQR Anna Sztyber / 29 Plan wykładu Obserwatory
Metody numeryczne. Równania nieliniowe. Janusz Szwabiński.
 Metody numeryczne Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl nm_slides-9.tex Metody numeryczne Janusz Szwabiński 7/1/2003 20:18 p.1/64 Równania nieliniowe 1. Równania nieliniowe z pojedynczym
Metody numeryczne Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl nm_slides-9.tex Metody numeryczne Janusz Szwabiński 7/1/2003 20:18 p.1/64 Równania nieliniowe 1. Równania nieliniowe z pojedynczym
Metody Lagrange a i Hamiltona w Mechanice
 Metody Lagrange a i Hamiltona w Mechanice Mariusz Przybycień Wydział Fizyki i Informatyki Stosowanej Akademia Górniczo-Hutnicza Wykład 9 M. Przybycień (WFiIS AGH) Metody Lagrange a i Hamiltona... Wykład
Metody Lagrange a i Hamiltona w Mechanice Mariusz Przybycień Wydział Fizyki i Informatyki Stosowanej Akademia Górniczo-Hutnicza Wykład 9 M. Przybycień (WFiIS AGH) Metody Lagrange a i Hamiltona... Wykład
Zadania do wykładu Jakościowa Teoria Równań Różniczkowych Zwyczajnych
 Zadania do wykładu Jakościowa Teoria Równań Różniczkowych Zwyczajnych [ ] e Zadanie 1 Pokazać, że X(t) = 2t cos t sin t e 2t jest specjalną macierzą fundamentalną w sin t cos t [ 2 cos chwili τ = 0 układu
Zadania do wykładu Jakościowa Teoria Równań Różniczkowych Zwyczajnych [ ] e Zadanie 1 Pokazać, że X(t) = 2t cos t sin t e 2t jest specjalną macierzą fundamentalną w sin t cos t [ 2 cos chwili τ = 0 układu
SVM: Maszyny Wektorów Podpieraja cych
 SVM 1 / 24 SVM: Maszyny Wektorów Podpieraja cych Nguyen Hung Son Outline SVM 2 / 24 1 Wprowadzenie 2 Brak liniowej separowalności danych Nieznaczna nieseparowalność Zmiana przetrzeń atrybutów 3 Implementacja
SVM 1 / 24 SVM: Maszyny Wektorów Podpieraja cych Nguyen Hung Son Outline SVM 2 / 24 1 Wprowadzenie 2 Brak liniowej separowalności danych Nieznaczna nieseparowalność Zmiana przetrzeń atrybutów 3 Implementacja
przy warunkach początkowych: 0 = 0, 0 = 0
 MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
Programowanie nieliniowe. Badania operacyjne Wykład 3 Metoda Lagrange a
 Programowanie nieliniowe Badania operacyjne Wykład 3 Metoda Lagrange a Plan wykładu Przykład problemu z nieliniową funkcją celu Sformułowanie problemu programowania matematycznego Podstawowe definicje
Programowanie nieliniowe Badania operacyjne Wykład 3 Metoda Lagrange a Plan wykładu Przykład problemu z nieliniową funkcją celu Sformułowanie problemu programowania matematycznego Podstawowe definicje
ELEMENTY ANALIZY NUMERYCZNEJ ELEMENTY ANALIZY NUMERYCZNEJ. Egzamin pisemny zestaw 1 24 czerwca 2019 roku
 Egzamin pisemny zestaw. ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x n, to funkcja x0 x gx ( ) + [ gx (
Egzamin pisemny zestaw. ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x n, to funkcja x0 x gx ( ) + [ gx (
METODY KOMPUTEROWE W MECHANICE
 METODY KOMPUTEROWE W MECHANICE wykład dr inż. Paweł Stąpór laboratorium 15 g, projekt 15 g. dr inż. Paweł Stąpór dr inż. Sławomir Koczubiej Politechnika Świętokrzyska Wydział Zarządzania i Modelowania
METODY KOMPUTEROWE W MECHANICE wykład dr inż. Paweł Stąpór laboratorium 15 g, projekt 15 g. dr inż. Paweł Stąpór dr inż. Sławomir Koczubiej Politechnika Świętokrzyska Wydział Zarządzania i Modelowania
Przestrzeń unitarna. Jacek Kłopotowski. 23 października Katedra Matematyki i Ekonomii Matematycznej SGH
 Katedra Matematyki i Ekonomii Matematycznej SGH 23 października 2018 Definicja iloczynu skalarnego Definicja Iloczynem skalarnym w przestrzeni liniowej R n nazywamy odwzorowanie ( ) : R n R n R spełniające
Katedra Matematyki i Ekonomii Matematycznej SGH 23 października 2018 Definicja iloczynu skalarnego Definicja Iloczynem skalarnym w przestrzeni liniowej R n nazywamy odwzorowanie ( ) : R n R n R spełniające
Podstawy robotyki wykład VI. Dynamika manipulatora
 Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu
Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu
Systemy. Krzysztof Patan
 Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej
 MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
Rys. 1 Otwarty układ regulacji
 Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Stabilność II Metody Lapunowa badania stabilności
 Metody Lapunowa badania stabilności Interesuje nas w sposób szczególny system: Wprowadzamy dla niego pojęcia: - stabilności wewnętrznej - odnosi się do zachowania się systemu przy zerowym wejściu, czyli
Metody Lapunowa badania stabilności Interesuje nas w sposób szczególny system: Wprowadzamy dla niego pojęcia: - stabilności wewnętrznej - odnosi się do zachowania się systemu przy zerowym wejściu, czyli
ELEMENTY ANALIZY NUMERYCZNEJ ELEMENTY ANALIZY NUMERYCZNEJ. Egzamin pisemny zestaw 1 26 czerwca 2017 roku
 Egzamin pisemny zestaw czerwca 0 roku Imię i nazwisko:.... ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x
Egzamin pisemny zestaw czerwca 0 roku Imię i nazwisko:.... ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x
Co to są równania ruchu? Jak je całkować?
 Co to są równania ruchu? Jak je całkować? Maria Przybylska CA UMK 10.03.2010 M. Przybylska (CA UMK) Ruch i całki 10.03.2010 1 / 29 Ruch ciała i jego opis Problemy co to jest ruch: zmiana położenia ciała
Co to są równania ruchu? Jak je całkować? Maria Przybylska CA UMK 10.03.2010 M. Przybylska (CA UMK) Ruch i całki 10.03.2010 1 / 29 Ruch ciała i jego opis Problemy co to jest ruch: zmiana położenia ciała
Wahadło odwrocone (NI Elvis 2) Modelowanie i stabilizacja w dolnym położeniu równowagi.
 Modelowanie i stabilizacja w dolnym położeniu równowagi.") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Wahadło odwrocone (NI Elvis 2) Modelowanie i stabilizacja w dolnym położeniu równowagi.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Wahadło odwrocone (NI Elvis 2) Modelowanie i stabilizacja w dolnym położeniu równowagi.
Metoda mnożników Lagrange a i jej zastosowania w ekonomii
 Maciej Grzesiak Metoda mnożników Lagrange a i jej zastosowania w ekonomii 1 Metoda mnożników Lagrange a znajdowania ekstremum warunkowego Pochodna kierunkowa i gradient Dla prostoty ograniczymy się do
Maciej Grzesiak Metoda mnożników Lagrange a i jej zastosowania w ekonomii 1 Metoda mnożników Lagrange a znajdowania ekstremum warunkowego Pochodna kierunkowa i gradient Dla prostoty ograniczymy się do
5. Równania różniczkowe zwyczajne pierwszego rzędu
 5. Równania różniczkowe zwyczajne pierwszego rzędu 5.1. Wstęp. Definicja 5.1. Niech V R 3 będzie obszarem oraz F : V R. Równaniem różniczkowym zwyczajnym rzędu pierwszego nazywamy równanie postaci Równanie
5. Równania różniczkowe zwyczajne pierwszego rzędu 5.1. Wstęp. Definicja 5.1. Niech V R 3 będzie obszarem oraz F : V R. Równaniem różniczkowym zwyczajnym rzędu pierwszego nazywamy równanie postaci Równanie
Ćwiczenie M-2 Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego Cel ćwiczenia: II. Przyrządy: III. Literatura: IV. Wstęp. l Rys.
 Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Przekształcanie równań stanu do postaci kanonicznej diagonalnej
 Przekształcanie równań stanu do postaci kanonicznej diagonalnej Przygotowanie: Dariusz Pazderski Liniowe przekształcenie równania stanu Rozważmy liniowe równanie stanu i równanie wyjścia układu niesingularnego
Przekształcanie równań stanu do postaci kanonicznej diagonalnej Przygotowanie: Dariusz Pazderski Liniowe przekształcenie równania stanu Rozważmy liniowe równanie stanu i równanie wyjścia układu niesingularnego
ALGEBRA Z GEOMETRIĄ ANALITYCZNĄ zadania z odpowiedziami
 ALGEBRA Z GEOMETRIĄ ANALITYCZNĄ zadania z odpowiedziami Maciej Burnecki opracowanie strona główna Spis treści 1 Wyrażenia algebraiczne indukcja matematyczna 1 Geometria analityczna w R 3 3 Liczby zespolone
ALGEBRA Z GEOMETRIĄ ANALITYCZNĄ zadania z odpowiedziami Maciej Burnecki opracowanie strona główna Spis treści 1 Wyrażenia algebraiczne indukcja matematyczna 1 Geometria analityczna w R 3 3 Liczby zespolone
PROGRAMOWANIE NIELINIOWE
 PROGRAMOWANIE NIELINIOWE Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie programowania nieliniowego (ZPN) min f(x) g i (x) 0, h i (x) = 0, i = 1,..., m g i = 1,..., m h f(x) funkcja celu g i (x) i
PROGRAMOWANIE NIELINIOWE Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie programowania nieliniowego (ZPN) min f(x) g i (x) 0, h i (x) = 0, i = 1,..., m g i = 1,..., m h f(x) funkcja celu g i (x) i
RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE. Wiele obiektywnych prawidłowości przyrodniczych udaje się zapisać w postaci równości formalnej
 RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE Wiele obiektywnych prawidłowości przyrodniczych udaje się zapisać w postaci równości formalnej F (x, y(x), y (1) (x), y () (x),..., y (n) (x)) = 0, gdzie y (k) (x) to k ta
RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE Wiele obiektywnych prawidłowości przyrodniczych udaje się zapisać w postaci równości formalnej F (x, y(x), y (1) (x), y () (x),..., y (n) (x)) = 0, gdzie y (k) (x) to k ta
Zadania kinematyki mechanizmów
 Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki
Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki
Podstawy Automatyki Zbiór zadań dla studentów II roku AiR oraz MiBM
 Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Podstawy robotyki wykład V. Jakobian manipulatora. Osobliwości
 Podstawy robotyki Wykład V Jakobian manipulatora i osobliwości Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Metoda bezpośrednia uzyskania macierzy
Podstawy robotyki Wykład V Jakobian manipulatora i osobliwości Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Metoda bezpośrednia uzyskania macierzy
m v + bv = u y = v - masa samochodu - prędkość - siła silnika - tarcie - wyjście układu , dostajemy ostatecznie: dt ) = 0 e 2 u C R 2 C du C
 = 0 e 2 u C R 2 C du C") Opis zmiennych stanu 1. Rozpatrzmy model prostego tempomatu samochodowego: { m v + bv = u y = v, gdzie m v u b y - masa samochodu - prędkość - siła silnika - tarcie - wyjście układu a. Przyjmując siłę
Opis zmiennych stanu 1. Rozpatrzmy model prostego tempomatu samochodowego: { m v + bv = u y = v, gdzie m v u b y - masa samochodu - prędkość - siła silnika - tarcie - wyjście układu a. Przyjmując siłę
Układy równań i równania wyższych rzędów
 Rozdział Układy równań i równania wyższych rzędów Układy równań różniczkowych zwyczajnych Wprowadzenie W poprzednich paragrafach zajmowaliśmy się równaniami różniczkowymi y = f(x, y), których rozwiązaniem
Rozdział Układy równań i równania wyższych rzędów Układy równań różniczkowych zwyczajnych Wprowadzenie W poprzednich paragrafach zajmowaliśmy się równaniami różniczkowymi y = f(x, y), których rozwiązaniem
Wykład z modelowania matematycznego.
 Załóżmy, że równanie różniczkowe x (t) = f (t, x) (1) ma rozwiązanie ogólne x(t) = ϕ(t, c). (2) Załóżmy, że równanie różniczkowe x (t) = f (t, x) (1) ma rozwiązanie ogólne x(t) = ϕ(t, c). (2) Rodzina funkcji
Załóżmy, że równanie różniczkowe x (t) = f (t, x) (1) ma rozwiązanie ogólne x(t) = ϕ(t, c). (2) Załóżmy, że równanie różniczkowe x (t) = f (t, x) (1) ma rozwiązanie ogólne x(t) = ϕ(t, c). (2) Rodzina funkcji
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Wykład 14 i 15. Równania różniczkowe. Równanie o zmiennych rozdzielonych. Definicja 1. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie
 Wykład 14 i 15 Równania różniczkowe Definicja 1. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (x, y, y, y,..., y (n) ) = 0 (1) gdzie: y = y(x) niewiadoma funkcja zmiennej rzeczywistej
Wykład 14 i 15 Równania różniczkowe Definicja 1. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (x, y, y, y,..., y (n) ) = 0 (1) gdzie: y = y(x) niewiadoma funkcja zmiennej rzeczywistej
Biotechnologia, Chemia, Chemia Budowlana - Wydział Chemiczny - 1
 Biotechnologia, Chemia, Chemia Budowlana - Wydział Chemiczny - 1 Równania różniczkowe pierwszego rzędu Równaniem różniczkowym zwyczajnym pierwszego rzędu nazywamy równanie postaci (R) y = f(x, y). Najogólniejszą
Biotechnologia, Chemia, Chemia Budowlana - Wydział Chemiczny - 1 Równania różniczkowe pierwszego rzędu Równaniem różniczkowym zwyczajnym pierwszego rzędu nazywamy równanie postaci (R) y = f(x, y). Najogólniejszą
DB Algebra liniowa semestr zimowy 2018
 DB Algebra liniowa semestr zimowy 2018 SPIS TREŚCI Teoria oraz większość zadań w niniejszym skrypcie zostały opracowane na podstawie książek: 1 G Banaszak, W Gajda, Elementy algebry liniowej cz I, Wydawnictwo
DB Algebra liniowa semestr zimowy 2018 SPIS TREŚCI Teoria oraz większość zadań w niniejszym skrypcie zostały opracowane na podstawie książek: 1 G Banaszak, W Gajda, Elementy algebry liniowej cz I, Wydawnictwo
Wykład z modelowania matematycznego. Przykłady modelowania w mechanice i elektrotechnice.
 Wykład z modelowania matematycznego. Przykłady modelowania w mechanice i elektrotechnice. 1 Wahadło matematyczne. Wahadłem matematycznym nazywamy punkt materialny o masie m zawieszony na długiej, cienkiej
Wykład z modelowania matematycznego. Przykłady modelowania w mechanice i elektrotechnice. 1 Wahadło matematyczne. Wahadłem matematycznym nazywamy punkt materialny o masie m zawieszony na długiej, cienkiej
INTERPOLACJA I APROKSYMACJA FUNKCJI
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
IX. MECHANIKA (FIZYKA) KWANTOWA
 KWANTOWA") IX. MECHANIKA (FIZYKA) KWANTOWA IX.1. OPERACJE OBSERWACJI. a) klasycznie nie ważna kolejność, w jakiej wykonujemy pomiary. AB = BA A pomiar wielkości A B pomiar wielkości B b) kwantowo wartość obserwacji
IX. MECHANIKA (FIZYKA) KWANTOWA IX.1. OPERACJE OBSERWACJI. a) klasycznie nie ważna kolejność, w jakiej wykonujemy pomiary. AB = BA A pomiar wielkości A B pomiar wielkości B b) kwantowo wartość obserwacji
Metody numeryczne. Sformułowanie zagadnienia interpolacji
 Ćwiczenia nr 4. Sformułowanie zagadnienia interpolacji Niech będą dane punkty x 0,..., x n i wartości y 0,..., y n, takie że i=0,...,n y i = f (x i )). Szukamy funkcji F (funkcji interpolującej), takiej
Ćwiczenia nr 4. Sformułowanie zagadnienia interpolacji Niech będą dane punkty x 0,..., x n i wartości y 0,..., y n, takie że i=0,...,n y i = f (x i )). Szukamy funkcji F (funkcji interpolującej), takiej
ELEKTROTECHNIKA Semestr 1 Rok akad / ZADANIA Z MATEMATYKI Zestaw Przedstaw w postaci algebraicznej liczby zespolone: (3 + 2j)(5 2j),
(5 2j),") ELEKTROTECHNIKA Semestr Rok akad. / 5 ZADANIA Z MATEMATYKI Zestaw. Przedstaw w postaci algebraicznej liczby zespolone: (3 + j)(5 j) 3 j +j (5 + j) (3 + j) 3. Narysuj zbiory punktów na płaszczyźnie: +j
ELEKTROTECHNIKA Semestr Rok akad. / 5 ZADANIA Z MATEMATYKI Zestaw. Przedstaw w postaci algebraicznej liczby zespolone: (3 + j)(5 j) 3 j +j (5 + j) (3 + j) 3. Narysuj zbiory punktów na płaszczyźnie: +j
Macierze i Wyznaczniki
 dr Krzysztof Żyjewski MiBM; S-I 0.inż. 0 października 04 Macierze i Wyznaczniki Kilka wzorów i informacji pomocniczych: Definicja. Iloczynem macierzy A = [a ij m n, i macierzy B = [b ij n p nazywamy macierz
dr Krzysztof Żyjewski MiBM; S-I 0.inż. 0 października 04 Macierze i Wyznaczniki Kilka wzorów i informacji pomocniczych: Definicja. Iloczynem macierzy A = [a ij m n, i macierzy B = [b ij n p nazywamy macierz
Nazwisko i imię: Zespół: Data: Ćwiczenie nr 1: Wahadło fizyczne. opis ruchu drgającego a w szczególności drgań wahadła fizycznego
 Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Całki nieoznaczone. 1 Własności. 2 Wzory podstawowe. Adam Gregosiewicz 27 maja a) Jeżeli F (x) = f(x), to f(x)dx = F (x) + C,
 Jeżeli F (x) = f(x), to f(x)dx = F (x) + C,") Całki nieoznaczone Adam Gregosiewicz 7 maja 00 Własności a) Jeżeli F () = f(), to f()d = F () + C, dla dowolnej stałej C R. b) Jeżeli a R, to af()d = a f()d. c) Jeżeli f i g są funkcjami całkowalnymi,
Całki nieoznaczone Adam Gregosiewicz 7 maja 00 Własności a) Jeżeli F () = f(), to f()d = F () + C, dla dowolnej stałej C R. b) Jeżeli a R, to af()d = a f()d. c) Jeżeli f i g są funkcjami całkowalnymi,
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Wyznaczanie prędkości lotu pocisku na podstawie badania ruchu wahadła balistycznego
 Ćwiczenie nr Wyznaczanie prędkości lotu pocisku na podstawie badania ruchu wahadła balistycznego. Wymagania do ćwiczenia 1. ynamika ruchu obrotowego.. rgania harmoniczne Literatura:. Halliday, R. Resnick,
Ćwiczenie nr Wyznaczanie prędkości lotu pocisku na podstawie badania ruchu wahadła balistycznego. Wymagania do ćwiczenia 1. ynamika ruchu obrotowego.. rgania harmoniczne Literatura:. Halliday, R. Resnick,
= i Ponieważ pierwiastkami stopnia 3 z 1 są (jak łatwo wyliczyć) liczby 1, 1+i 3
 liczby 1, 1+i 3") ZESTAW I 1. Rozwiązać równanie. Pierwiastki zaznaczyć w płaszczyźnie zespolonej. z 3 8(1 + i) 3 0, Sposób 1. Korzystamy ze wzoru a 3 b 3 (a b)(a 2 + ab + b 2 ), co daje: (z 2 2i)(z 2 + 2(1 + i)z + (1 +
ZESTAW I 1. Rozwiązać równanie. Pierwiastki zaznaczyć w płaszczyźnie zespolonej. z 3 8(1 + i) 3 0, Sposób 1. Korzystamy ze wzoru a 3 b 3 (a b)(a 2 + ab + b 2 ), co daje: (z 2 2i)(z 2 + 2(1 + i)z + (1 +
MECHANIKA II. Drgania wymuszone
 MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny Daniel Lewandowski (I-19) MECHANIKA II. Drgania wymuszone 1 / 30 Układ drgajacy o jednym stopniu swobody
MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny Daniel Lewandowski (I-19) MECHANIKA II. Drgania wymuszone 1 / 30 Układ drgajacy o jednym stopniu swobody
Równania kwadratowe. Zad. 4: (profil matematyczno-fizyczny) Dla jakich wartości parametru m równanie mx 2 + 2x + m 2 = 0 ma dwa pierwiastki mniejsze
 Dla jakich wartości parametru m równanie mx 2 + 2x + m 2 = 0 ma dwa pierwiastki mniejsze") Równania kwadratowe Zad : Dany jest wielomian W(x) = x mx + m m + a) Dla jakich wartości parametru m wielomian ten ma dwa pierwiastki, których suma jest o jeden większa od ich iloczynu? *b) Przyjmij, Ŝe
Równania kwadratowe Zad : Dany jest wielomian W(x) = x mx + m m + a) Dla jakich wartości parametru m wielomian ten ma dwa pierwiastki, których suma jest o jeden większa od ich iloczynu? *b) Przyjmij, Ŝe
Tematyka egzaminu z Podstaw sterowania
 Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Przekształcenia wykresów funkcji
 Przekształcenia wykresów funkcji Przekształcenia wykresów funkcji Jerzy Rutkowski Teoria Niech f : R R będzie dowolną funkcją i niech liczby a, k R spełniają warunki: a > 0 i k 0. Związek między funkcją
Przekształcenia wykresów funkcji Przekształcenia wykresów funkcji Jerzy Rutkowski Teoria Niech f : R R będzie dowolną funkcją i niech liczby a, k R spełniają warunki: a > 0 i k 0. Związek między funkcją
Układy autonomiczne. Rozdział Stabilność w sensie Lapunowa. Przedmiotem analizy w tym rozdziale będą układy równań autonomicznych
 Rozdział 5 Układy autonomiczne 5.1 Stabilność w sensie Lapunowa Przedmiotem analizy w tym rozdziale będą układy równań autonomicznych ẋ = f(x), (5.1) z funkcją f : Q R m, gdzie Q jest otwartym zbiorem
Rozdział 5 Układy autonomiczne 5.1 Stabilność w sensie Lapunowa Przedmiotem analizy w tym rozdziale będą układy równań autonomicznych ẋ = f(x), (5.1) z funkcją f : Q R m, gdzie Q jest otwartym zbiorem
Obliczenia iteracyjne
 Lekcja Strona z Obliczenia iteracyjne Zmienne iteracyjne (wyliczeniowe) Obliczenia iteracyjne wymagają zdefiniowania specjalnej zmiennej nazywanej iteracyjną lub wyliczeniową. Zmienną iteracyjną od zwykłej
Lekcja Strona z Obliczenia iteracyjne Zmienne iteracyjne (wyliczeniowe) Obliczenia iteracyjne wymagają zdefiniowania specjalnej zmiennej nazywanej iteracyjną lub wyliczeniową. Zmienną iteracyjną od zwykłej
Metody dekompozycji macierzy stosowane w automatyce
 Metody dekompozycji macierzy stosowane w automatyce Grzegorz Mzyk Politechnika Wrocławska, WydziałElektroniki 23 lutego 2015 Plan wykładu 1 Wprowadzenie 2 Rozkład LU 3 Rozkład spektralny 4 Rozkład Cholesky
Metody dekompozycji macierzy stosowane w automatyce Grzegorz Mzyk Politechnika Wrocławska, WydziałElektroniki 23 lutego 2015 Plan wykładu 1 Wprowadzenie 2 Rozkład LU 3 Rozkład spektralny 4 Rozkład Cholesky
LUBELSKA PRÓBA PRZED MATURĄ 2018 poziom podstawowy
 LUELSK PRÓ PRZED MTURĄ 08 poziom podstawowy Schemat oceniania Zadania zamknięte (Podajemy kartotekę zadań, która ułatwi Państwu przeprowadzenie jakościowej analizy wyników). Zadanie. (0 ). Liczby rzeczywiste.
LUELSK PRÓ PRZED MTURĄ 08 poziom podstawowy Schemat oceniania Zadania zamknięte (Podajemy kartotekę zadań, która ułatwi Państwu przeprowadzenie jakościowej analizy wyników). Zadanie. (0 ). Liczby rzeczywiste.
VII. Drgania układów nieliniowych
 VII. Drgania układów nieliniowych 1. Drgania anharmoniczne spowodowane symetryczna siła zwrotna 1.1 Różniczkowe równanie ruchu Rozważamy teraz drgania swobodne masy m przytwierdzonej do sprężyny o współczynniku
VII. Drgania układów nieliniowych 1. Drgania anharmoniczne spowodowane symetryczna siła zwrotna 1.1 Różniczkowe równanie ruchu Rozważamy teraz drgania swobodne masy m przytwierdzonej do sprężyny o współczynniku
Metody Lagrange a i Hamiltona w Mechanice
 Meody Lagrange a i Hamilona w Mechanice Mariusz Przybycień Wydział Fizyki i Informayki Sosowanej Akademia Górniczo-Hunicza Wykład 7 M. Przybycień (WFiIS AGH) Meody Lagrange a i Hamilona... Wykład 7 1 /
Meody Lagrange a i Hamilona w Mechanice Mariusz Przybycień Wydział Fizyki i Informayki Sosowanej Akademia Górniczo-Hunicza Wykład 7 M. Przybycień (WFiIS AGH) Meody Lagrange a i Hamilona... Wykład 7 1 /
Formy kwadratowe. Rozdział 10
 Rozdział 10 Formy kwadratowe Rozważmy rzeczywistą macierz symetryczną A R n n Definicja 101 Funkcję h : R n R postaci h (x) = x T Ax (101) nazywamy formą kwadratową Macierz symetryczną A występującą w
Rozdział 10 Formy kwadratowe Rozważmy rzeczywistą macierz symetryczną A R n n Definicja 101 Funkcję h : R n R postaci h (x) = x T Ax (101) nazywamy formą kwadratową Macierz symetryczną A występującą w
Podstawy fizyki sezon 1 VII. Ruch drgający
 Podstawy fizyki sezon 1 VII. Ruch drgający Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Ruch skutkiem działania
Podstawy fizyki sezon 1 VII. Ruch drgający Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Ruch skutkiem działania
Liczby zespolone, liniowa zależność i bazy Javier de Lucas. a d b c. ad bc
 Liczby zespolone, liniowa zależność i bazy Javier de Lucas Ćwiczenie. Dowieść, że jeśli µ := c d d c, to homografia h(x) = (ax+b)/(cx+d), a, b, c, d C, ad bc, odwzorowuje oś rzeczywist a R C na okr ag
Liczby zespolone, liniowa zależność i bazy Javier de Lucas Ćwiczenie. Dowieść, że jeśli µ := c d d c, to homografia h(x) = (ax+b)/(cx+d), a, b, c, d C, ad bc, odwzorowuje oś rzeczywist a R C na okr ag
III. RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE
 III. RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE 1. Pojęcia wstępne Przykład 1.1. (Rozpad substancji promieniotwórczej ) Z doświadczeń wiadomo, że prędkość rozpa pierwiastka promieniotwórczego jest ujemna i proporcjonalna
III. RÓWNANIA RÓŻNICZKOWE ZWYCZAJNE 1. Pojęcia wstępne Przykład 1.1. (Rozpad substancji promieniotwórczej ) Z doświadczeń wiadomo, że prędkość rozpa pierwiastka promieniotwórczego jest ujemna i proporcjonalna
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
MECHANIKA II. Drgania wymuszone
 MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
1 Elementy logiki i teorii mnogości
 1 Elementy logiki i teorii mnogości 11 Elementy logiki Notatki do wykładu Definicja Zdaniem logicznym nazywamy zdanie oznajmujące, któremu przysługuje jedna z dwu logicznych ocen prawda (1) albo fałsz
1 Elementy logiki i teorii mnogości 11 Elementy logiki Notatki do wykładu Definicja Zdaniem logicznym nazywamy zdanie oznajmujące, któremu przysługuje jedna z dwu logicznych ocen prawda (1) albo fałsz
27. RÓWNANIA RÓŻNICZKOWE CZĄSTKOWE
 27. RÓWNANIA RÓŻNICZKOWE CZĄSTKOWE 27.1. Wiadomości wstępne Równaniem różniczkowym cząstkowym nazywamy związek w którym występuje funkcja niewiadoma u dwóch lub większej liczby zmiennych niezależnych i
27. RÓWNANIA RÓŻNICZKOWE CZĄSTKOWE 27.1. Wiadomości wstępne Równaniem różniczkowym cząstkowym nazywamy związek w którym występuje funkcja niewiadoma u dwóch lub większej liczby zmiennych niezależnych i
Lista nr 1 - Liczby zespolone
 Lista nr - Liczby zespolone Zadanie. Obliczyć: a) ( 3 i) 3 ( 6 i ) 8 c) (+ 3i) 8 (i ) 6 + 3 i + e) f*) g) ( 3 i ) 77 ( ( 3 i + ) 3i 3i h) ( + 3i) 5 ( i) 0 i) i ( 3 i ) 4 ) +... + ( 3 i ) 0 Zadanie. Przedstawić
Lista nr - Liczby zespolone Zadanie. Obliczyć: a) ( 3 i) 3 ( 6 i ) 8 c) (+ 3i) 8 (i ) 6 + 3 i + e) f*) g) ( 3 i ) 77 ( ( 3 i + ) 3i 3i h) ( + 3i) 5 ( i) 0 i) i ( 3 i ) 4 ) +... + ( 3 i ) 0 Zadanie. Przedstawić
ZADANIA ZAMKNIETE W zadaniach 1-25 wybierz i zaznacz na karcie odpowiedzi poprawna
 Arkusz A01 2 Egzamin maturalny z matematyki Poziom podstawowy ZADANIA ZAMKNIETE W zadaniach 1-25 wybierz i zaznacz na karcie odpowiedzi poprawna odpowiedź Zadanie 1. (0-1) Liczba log 1 3 3 27 jest równa:
Arkusz A01 2 Egzamin maturalny z matematyki Poziom podstawowy ZADANIA ZAMKNIETE W zadaniach 1-25 wybierz i zaznacz na karcie odpowiedzi poprawna odpowiedź Zadanie 1. (0-1) Liczba log 1 3 3 27 jest równa: