Rys. 1 Otwarty układ regulacji
|
|
|
- Judyta Sowa
- 9 lat temu
- Przeglądów:
Transkrypt
1 Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący z zakłócenia y sygnał wyjścia Rys. 1 Otwarty układ regulacji Na obiekt regulacji (sterowania) działają dwa rodzaje sygnałów wejściowych. Po pierwsze są to sygnały sterujące, po drugie zakłócenia. Sygnały sterujące mogą być kształtowane przez projektanta układu i pozwalają oddziaływać na obiekt w pożądany przez nas sposób. Zakłócenia są zewnętrznymi sygnałami niezależnymi od konstruktora układu, które z reguły utrudniają proces regulacji. Sygnał wyjściowy to sygnał, na który oddziałują sygnały sterujące i zakłócenia. Sygnałem nazywamy każdą wielkość fizyczną, która przenosi informacje. Regulator to urządzenie, które reguluje sygnały sterujące. Rys. 2 Zamknięty układ regulacji W zamkniętym układzie regulacji występuje sprzężenie zwrotne. Mówimy, że w układzie występuje sprzężenie zwrotne jeżeli nie tylko informacja z wejścia obiektu, ale gdy również informacja z wyjścia obiektu przekazywana jest na jego wejście. Rozróżniamy dwa rodzaje sprzężeń zwrotnych, są to sprzężenia dodatnie i ujemne. Dodatnie sprzężenie zwrotne potęguje efekt wywoływany pewną przyczyną, natomiast sprzężenie ujemne taki efekt zmniejsza. Sprzężenia zwrotne są celowo wprowadzane w wielu urządzeniach technicznych, aby wpływać na działanie tych urządzeń, ale także w naturalny sposób występują w przyrodzie, ekonomii, itd. Pierwszy celowo zbudowany regulator umieszczony był na wale maszyny parowej. Były to odważniki, które pod wpływem siły odśrodkowej zamykały lub otwierały dostęp pary.

2 Rodzaje węzłów Rys. 3 węzeł rozgałęźny Węzeł rozgałęźny to węzeł, w którym sygnał sterujący przekazany jest na dwa lub więcej sygnały wyjścia. Sygnały wyjścia równe są sygnałowi wejścia. Rys. 4 węzeł sumacyjny Węzeł sumacyjny to węzeł, w którym sygnał wyjścia jest składową dwóch lub więcej sygnałów sterujących. Rys. 5 Układ regulacji automatycznej gdzie e jest uchybem regulacji, błędem regulacji (ang. error). e = y zd y. Uchyb regulacji pokazuje jak bardzo wynik regulacji odbiega od wyniku jaki powinien zadany, czyli taki, który chcieliśmy uzyskać. Uchyb nazywa sie też niedoskonałością operacji. Optymalną sytuacją jest lim e = 0.
. e = y zd y.")
3 Rys. 6 i 7 Proces regulacji
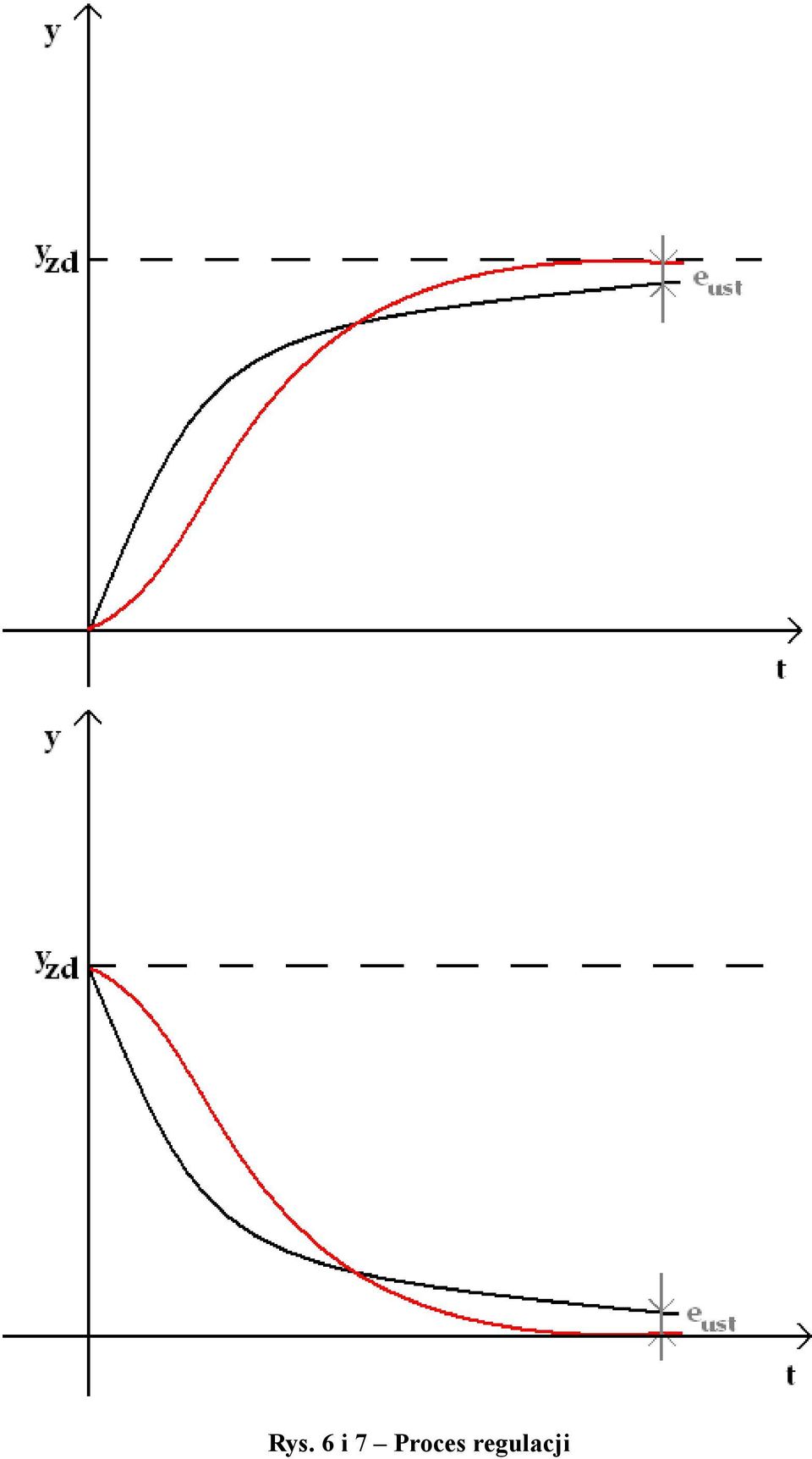
4 W procesie regulacji wyróżniamy co najmniej dwa etapy: przejściowy i ustalony. Uchyb w stanie ustalonym nazywamy uchybem ustalonym. Podstawowym celem regulacji jest sprowadzenie do stanu ustalonego. Zadaniem prawidłowo zaprojektowanego układu regulacji jest zapewnienie pożądanych własności obiektu zarówno w stanie przejściowym jak i w stanie ustalonym. Oznacza to, że chcemy, aby uchyb zanikał szybko i w stanie ustalonym był możliwie blisko równy zero. W stanie przejściowym mówimy o dobrych właściwościach dynamicznych obiektu, a w stanie ustalonym mówimy o jego własnościach statycznych. Rys. 8 Przebieg procesu regulacji Rys. 9 Proces regulacji z przeregulowaniem

5 Mówimy, że w układzie występuje przeregulowanie jeżeli sygnał wejściowy obiektu przekracza w trakcie procesu regulacji swoją wartość zadaną. Kryteria jakości regulacji (miary jakości regulacji): 1. uchyb regulacji najmniejszy 2. niewystępowanie przeregulowań lub występowanie niewielkich regulacji 3. I-sze całkowe kryterium jakości regulacji I 1 = 0 e t dt ; I 2 = 0 e 2 t dt ; im mniejsze I 1, I 2 tym lepszy efekt procesu regulacji. W układach automatyki wyróżniamy dwa rodzaje sygnałów: sygnały ciągłe i sygnały dyskretne. Sygnały ciągłe wyrażone są ciągłymi funkcjami czasu. Sygnały dyskretne nie są określone dla dowolnego czasu, a jedynie w konkretnych chwilach. Sygnały dyskretne powstają, np. w trakcie sprawdzania temperatury. Najczęściej sygnały dyskretne dostajemy w wyniku próbkowania sygnałów ciągłych. Podział układów regulacji za względu na cel sterowania. Typowo wyróżniamy trzy rodzaje układów: 1. stałowartościową 2. programową 3. śledzącą (nadążną) Celem regulacji stałowartościowej jest uzyskanie niezmiennej z góry zadanej(stabilnej) wartości sygnału starowanego. r w rezystencja wewnętrzna R 0 rezystencja obciążeniowa i= U r w R 0 U z =U U r w R =U 0 R 0 r w R 0 r w Rys. 10 Przykład układu z regulacją stałowartościową

6 Regulacja programowa polega na zmianie wartości sygnału wyjściowego obiektu w pewien z góry znany sposób (założenie) a priori. Program według, którego zmienia się sytuacja wyjściowa. (np. wytop porcelany) Regulacja śledząca albo nadążna. W tym przypadku sygnał wyjściowy obiektu również ulega zmianie, ale sposób w jaki się zmienia nie jest z góry znany. Zasada superpozycji Rys. 11 Układ liniowy W układach liniowych spełniona jest zasada superpozycji. Układami liniowymi nazywamy takie, które opisane są liniowymi równaniami różniczkowymi, różnicowymi lub algebraicznymi. Rys. 12 Wykres układu liniowego k R ; k= 1 1 l 2

7 Rys. 13 Wykres układu nieliniowego Niech u 1, u 2, u 3 oznacza wartości sygnału wejściowego, a y 1, y 2, y 3 odpowiedzi na każde z tych sygnałów. Odpowiedzią na kombinację linową sygnałów wejściowych u 1, u 2, u 3, u = k 1 u 1 + k 2 u 2, k 3 u 3, jest to ta sama kombinacja liniowa odpowiedzi y = k 1 y 1 + k 2 y 2, k 3 y 3. Zasada superpozycji obowiązuje wyłącznie w układach liniowych. Przykład a) y = 2u u 1 = 5 => y 1 = 10 u 2 = 7 => y 2 = 14 u 3 = 1 => y 3 = 2 u = 2 u u u 3 = 20 => y = 40 y = 2 y y y 3 = 40, więc prawda L=P b) y = u2 u 1 = 5 => y 1 = 25 u 2 = 7 => y 2 = 49 u 3 = 1 => y 3 = 1 u = 2 u u u 3 = 20 => y = 400 y = 2 y y 2 + 2yu 3 = 102, więc nieprawda L P
 y = 2u u 1 = 5 => y 1 = 10 u 2 = 7 => y 2 = 14 u 3 = 1 => y 3 = 2 u = 2 u 1 + 1 u 2 + 3 u 3 = 20 => y = 40 y = 2 y 1 + 1 y 2 + 2 y 3 = 40, więc prawda L=P b) y = u2 u")
8 Podstawowe charakterystyki elementów nieliniowych nasycenie element ze strefą martwą Rys. 14 Charakterystyka statyczna z nasyceniem Rys. 15 Charakterystyka statyczna elementu ze strefą martwą

9 przekaźnikowa (element dwupołożeniowy) Rys. 16 Charakterystyka styczna przekaźnikowa Rys. 17 Charakterystyka statyczna z histerezą (ze strefą niejednoznaczności)

10 Wyróżniamy trzy typowe połączenia elementów: szeregowe nazywane łańcuchowymi, równoległe, ze sprzężeniem zwrotnym. W przypadku połączenia szeregowego wyjście danego elementu przyłączone jest do wejścia następnego elementu. Rys. 18 Połączenie szeregowe y= y 3 u 3 y 2 k 2 u 2 k 2 y 1 k 2 k 1 u 1 k 2 u y k 2 k 1 u Wypadkowy współczynnik wzmocnienia szeregowego połączenia elementów proporcjonalnych jest równy iloczynowi współczynników wzmocnienia poszczególnych elementów. n y= i=1 k i u W przypadku równoległego połączenia elementów ten sam sygnał wejściowy podawany jest na wejście każdego z tych elementów, natomiast sygnał wyjściowy stanowi sumę odpowiedzi wszystkich tych elementów. Rys. 18 Połączenie równoległe y= y 1 y 2 y 3 =k 1 u 1 k 2 u 2 k 3 u 3 =k 1 u k 2 u k 3 u=u k 1 k 2 k 3 y=k u ; k=k 1 k 2 k 3 n y= i=1 k i u Współczynnik wzmocnienia równoległego połączenia elementów proporcjonalnych jest równy sumie współczynników wzmocnienia wszystkich tych elementów.

11 W przypadku połączenia ze sprzężeniem Rys. 19 Połączenie równolegle ze sprzężeniem y= k 1 1±k 1 k 2 x ; gdyż jest to suma nieskończonego szeregu geometrycznego, przy czym spełniony musi być warunek: k 1 k 2 1.

Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Dobór parametrów regulatora - symulacja komputerowa. Najprostszy układ automatycznej regulacji można przedstawić za pomocą
 Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
4. Właściwości eksploatacyjne układów regulacji Wprowadzenie. Hs () Ys () Ws () Es () Go () s. Vs ()
 Ys () Ws () Es () Go () s. Vs ()") 4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Prowadzący: Prof. PWr Jan Syposz
 Automatyzacja w inżynierii środowiska Prowadzący: Wykład 1 Prof. PWr Jan Syposz Zakres tematyczny wykładu Wprowadzenie do techniki regulacji i sterowania Regulatory Programowanie sterowników swobodnie
Automatyzacja w inżynierii środowiska Prowadzący: Wykład 1 Prof. PWr Jan Syposz Zakres tematyczny wykładu Wprowadzenie do techniki regulacji i sterowania Regulatory Programowanie sterowników swobodnie
1. Opis teoretyczny regulatora i obiektu z opóźnieniem.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Automatyka i Regulacja Automatyczna SEIwE- sem.4
 Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Dla naszego obiektu ciągłego: przy czasie próbkowania T p =2.
 1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Regulacja dwupołożeniowa.
 Politechnika Krakowska Wydział Inżynierii Elektrycznej i Komputerowej Zakład eorii Sterowania Regulacja dwupołożeniowa. Kraków Zakład eorii Sterowania (E ) Regulacja dwupołożeniowa opis ćwiczenia.. Opis
Politechnika Krakowska Wydział Inżynierii Elektrycznej i Komputerowej Zakład eorii Sterowania Regulacja dwupołożeniowa. Kraków Zakład eorii Sterowania (E ) Regulacja dwupołożeniowa opis ćwiczenia.. Opis
Laboratorium elementów automatyki i pomiarów w technologii chemicznej
 POLITECHNIKA WROCŁAWSKA Wydziałowy Zakład Inżynierii Biomedycznej i Pomiarowej Laboratorium elementów automatyki i pomiarów w technologii chemicznej Instrukcja do ćwiczenia Regulacja dwupołożeniowa Wrocław
POLITECHNIKA WROCŁAWSKA Wydziałowy Zakład Inżynierii Biomedycznej i Pomiarowej Laboratorium elementów automatyki i pomiarów w technologii chemicznej Instrukcja do ćwiczenia Regulacja dwupołożeniowa Wrocław
Ogólny schemat blokowy układu ze sprzężeniem zwrotnym
 1. Definicja sprzężenia zwrotnego Sprzężenie zwrotne w układach elektronicznych polega na doprowadzeniu części sygnału wyjściowego z powrotem do wejścia. Częśd sygnału wyjściowego, zwana sygnałem zwrotnym,
1. Definicja sprzężenia zwrotnego Sprzężenie zwrotne w układach elektronicznych polega na doprowadzeniu części sygnału wyjściowego z powrotem do wejścia. Częśd sygnału wyjściowego, zwana sygnałem zwrotnym,
SIMATIC S Regulator PID w sterowaniu procesami. dr inż. Damian Cetnarowicz. Plan wykładu. I n t e l i g e n t n e s y s t e m y z e
 Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Elementy układu automatycznej regulacji (UAR)
") 1 Elementy układu automatycznej regulacji (UAR) Wprowadzenie W naszej szkole, specjalizacją w klasie elektronicznej jest automatyka przemysłowa. Niniejszy artykuł ma na celu przedstawienie czytelnikom
1 Elementy układu automatycznej regulacji (UAR) Wprowadzenie W naszej szkole, specjalizacją w klasie elektronicznej jest automatyka przemysłowa. Niniejszy artykuł ma na celu przedstawienie czytelnikom
Przekształcanie schematów blokowych. Podczas ćwiczenia poruszane będą następujące zagadnienia:
 Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
II. STEROWANIE I REGULACJA AUTOMATYCZNA
 II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
Układy sterowania: a) otwarty, b) zamknięty w układzie zamkniętym, czyli w układzie z ujemnym sprzężeniem zwrotnym (układzie regulacji automatycznej)
 otwarty, b) zamknięty w układzie zamkniętym, czyli w układzie z ujemnym sprzężeniem zwrotnym (układzie regulacji automatycznej)") Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania; element sterujący nie otrzymuje żadnych informacji o sygnale wyjściowym y,
Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania; element sterujący nie otrzymuje żadnych informacji o sygnale wyjściowym y,
Modele i metody automatyki. Układy automatycznej regulacji UAR
 Modele i metody automatyki Układy automatycznej regulacji UAR Możliwości i problemy jakie stwarzają zamknięte układy automatycznej regulacji powodują, że stały się one głównym obiektem zainteresowań automatyków.
Modele i metody automatyki Układy automatycznej regulacji UAR Możliwości i problemy jakie stwarzają zamknięte układy automatycznej regulacji powodują, że stały się one głównym obiektem zainteresowań automatyków.
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
Automatyka i sterowanie w gazownictwie. Regulatory w układach regulacji
 Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
WSTĘP DO ELEKTRONIKI
 WSTĘP DO ELEKTRONIKI Część VI Sprzężenie zwrotne Wzmacniacz operacyjny Wzmacniacz operacyjny w układach z ujemnym i dodatnim sprzężeniem zwrotnym Janusz Brzychczyk IF UJ Sprzężenie zwrotne Sprzężeniem
WSTĘP DO ELEKTRONIKI Część VI Sprzężenie zwrotne Wzmacniacz operacyjny Wzmacniacz operacyjny w układach z ujemnym i dodatnim sprzężeniem zwrotnym Janusz Brzychczyk IF UJ Sprzężenie zwrotne Sprzężeniem
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
(Wszystkie wyniki zapisywać na dysku Dane E:)
") Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwustanowego oraz ocena, jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA
Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwustanowego oraz ocena, jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
WYDZIAŁ ELEKTRYCZNY KATEDRA AUTOMATYKI I ELEKTRONIKI. Badanie układu regulacji dwustawnej
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym
 Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym 1. Cel ćwiczenia Celem ćwiczenia jest analiza właściwości układu sterowania w torze otwartym, zamkniętym oraz zamkniętym z kompensacją zakłóceń.
Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym 1. Cel ćwiczenia Celem ćwiczenia jest analiza właściwości układu sterowania w torze otwartym, zamkniętym oraz zamkniętym z kompensacją zakłóceń.
Część 4. Zagadnienia szczególne
 Część 4 Zagadnienia szczególne a. Tryb nieciągłego prądu dławika Łukasz Starzak, Sterowanie przekształtników elektronicznych, zima 2011/12 1 Model przetwornicy w trybie nieciągłego prądu DC DC+AC Napięcie
Część 4 Zagadnienia szczególne a. Tryb nieciągłego prądu dławika Łukasz Starzak, Sterowanie przekształtników elektronicznych, zima 2011/12 1 Model przetwornicy w trybie nieciągłego prądu DC DC+AC Napięcie
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
(Wszystkie wyniki zapisywać na dysku Dane E:)
") Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwustanowego oraz ocena, jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA
Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwustanowego oraz ocena, jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA
PAiTM. materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż.
 PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
Podstawy automatyki Bases of automatic
 KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod Nazwa Nazwa w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Podstawy automatyki
KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod Nazwa Nazwa w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Podstawy automatyki
Inżynieria Systemów Dynamicznych (5)
") Inżynieria Systemów Dynamicznych (5) Dokładność Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 DOKŁAD 2 Uchyb Podstawowy strukturalny
Inżynieria Systemów Dynamicznych (5) Dokładność Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 DOKŁAD 2 Uchyb Podstawowy strukturalny
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
Sreszczenie. Słowa kluczowe: sterowanie, poziom cieczy, regulator rozmyty
 Ewa Wachowicz Katedra Systemów Sterowania Politechnika Koszalińska STEROWANIE POZIOMEM CIECZY W ZBIORNIKU Z WYKORZYSTANIEM REGULATORA ROZMYTEGO Sreszczenie W pracy omówiono układ regulacji poziomu cieczy,
Ewa Wachowicz Katedra Systemów Sterowania Politechnika Koszalińska STEROWANIE POZIOMEM CIECZY W ZBIORNIKU Z WYKORZYSTANIEM REGULATORA ROZMYTEGO Sreszczenie W pracy omówiono układ regulacji poziomu cieczy,
Systemy. Krzysztof Patan
 Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
WYDZIAŁ PPT / KATEDRA INŻYNIERII BIOMEDYCZNEJ D-1 LABORATORIUM Z AUTOMATYKI I ROBOTYKI Ćwiczenie nr 4. Badanie jakości regulacji dwupołożeniowej.
 Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
K p. K o G o (s) METODY DOBORU NASTAW Metoda linii pierwiastkowych Metody analityczne Metoda linii pierwiastkowych
 METODY DOBORU NASTAW Metoda linii pierwiastkowych Metody analityczne Metoda linii pierwiastkowych") METODY DOBORU NASTAW 7.3.. Metody analityczne 7.3.. Metoda linii pierwiastkowych 7.3.2 Metody doświadczalne 7.3.2.. Metoda Zieglera- Nicholsa 7.3.2.2. Wzmocnienie krytyczne 7.3.. Metoda linii pierwiastkowych
METODY DOBORU NASTAW 7.3.. Metody analityczne 7.3.. Metoda linii pierwiastkowych 7.3.2 Metody doświadczalne 7.3.2.. Metoda Zieglera- Nicholsa 7.3.2.2. Wzmocnienie krytyczne 7.3.. Metoda linii pierwiastkowych
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7
 Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Regulacja dwupołożeniowa (dwustawna)
") Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Plan wykładu. Własności statyczne i dynamiczne elementów automatyki:
 Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena LABORATORIUM 4. PODSTAW 5. AUTOMATYKI
 Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena LABORATORIUM 4. PODSTAW 5. AUTOMATYKI") Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA7b 1 Badanie jednoobwodowego układu regulacji
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA7b 1 Badanie jednoobwodowego układu regulacji
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
UKŁADY AUTOMATYCZNEJ REGULACJI MATERIAŁY POMOCNICZE DO ĆWICZEŃ LABORATORYJNYCH
 P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH UKŁADY AUTOMATYCZNEJ REGULACJI MATERIAŁY POMOCNICZE DO ĆWICZEŃ LABORATORYJNYCH
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH UKŁADY AUTOMATYCZNEJ REGULACJI MATERIAŁY POMOCNICZE DO ĆWICZEŃ LABORATORYJNYCH
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ
 REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ 1 1. Zadania regulatorów w układach regulacji automatycznej Do podstawowych zadań regulatorów w układach regulacji automatycznej należą: porównywanie wartości
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ 1 1. Zadania regulatorów w układach regulacji automatycznej Do podstawowych zadań regulatorów w układach regulacji automatycznej należą: porównywanie wartości
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
AiR_TR2_5/9 Teoria Regulacji II Control Theory II. Automatyka i Robotyka I stopień ogólno akademicki studia stacjonarne
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
WYDZIAŁ PPT / KATEDRA INŻYNIERII BIOMEDYCZNEJ D-1 LABORATORIUM Z MIERNICTWA I AUTOMATYKI Ćwiczenie nr 7. Badanie jakości regulacji dwupołożeniowej.
 Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa
 Rok akademicki 2015/2016 Semestr letni PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa Wstęp teoretyczny: W układzie regulacji określa
Rok akademicki 2015/2016 Semestr letni PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa Wstęp teoretyczny: W układzie regulacji określa
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transform
 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Transmitancje układów ciągłych
 Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 188152 (21) Numer zgłoszenia: 327709 (22) Data zgłoszenia: 23.07.1998 (13) B1 (51) Int.Cl.7: F24D 19/10
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 188152 (21) Numer zgłoszenia: 327709 (22) Data zgłoszenia: 23.07.1998 (13) B1 (51) Int.Cl.7: F24D 19/10
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Tranzystorowe wzmacniacze OE OB OC. na tranzystorach bipolarnych
 Tranzystorowe wzmacniacze OE OB OC na tranzystorach bipolarnych Wzmacniacz jest to urządzenie elektroniczne, którego zadaniem jest : proporcjonalne zwiększenie amplitudy wszystkich składowych widma sygnału
Tranzystorowe wzmacniacze OE OB OC na tranzystorach bipolarnych Wzmacniacz jest to urządzenie elektroniczne, którego zadaniem jest : proporcjonalne zwiększenie amplitudy wszystkich składowych widma sygnału
Automatyka i sterowanie w gazownictwie wykład 1
 Automatyka i sterowanie w gazownictwie wykład 1 Autor: dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów Pojęcia podstawowe z1 zm u1 ur Zadajnik Proces u1
Automatyka i sterowanie w gazownictwie wykład 1 Autor: dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów Pojęcia podstawowe z1 zm u1 ur Zadajnik Proces u1
Sterowaniem nazywamy celowe oddziaływanie na przebieg procesów. Można wyróżnid ręczne oraz automatyczne.
 Dwiczenia 2 Automatyka i robotyka Wstęp Podstawowe pojęcia: Sterowaniem nazywamy celowe oddziaływanie na przebieg procesów. Można wyróżnid ręczne oraz automatyczne. Układ wyodrębniony ze środowiska układ
Dwiczenia 2 Automatyka i robotyka Wstęp Podstawowe pojęcia: Sterowaniem nazywamy celowe oddziaływanie na przebieg procesów. Można wyróżnid ręczne oraz automatyczne. Układ wyodrębniony ze środowiska układ
Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe
 Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe Przetworniki cyfrowo / analogowe W cyfrowych systemach pomiarowych często zachodzi konieczność zmiany sygnału cyfrowego na analogowy, np. w celu
Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe Przetworniki cyfrowo / analogowe W cyfrowych systemach pomiarowych często zachodzi konieczność zmiany sygnału cyfrowego na analogowy, np. w celu
SYNTEZA UKŁADU AUTOMATYCZNEJ REGULACJI TEMPERATURY
 Ćwiczenie SYNTEZA UKŁADU AUTOMATYCZNEJ REGULACJI TEMPERATURY 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie studentów z pracą układu automatycznej regulacji temperatury 2. WPROWADZENIE Układy automatycznej
Ćwiczenie SYNTEZA UKŁADU AUTOMATYCZNEJ REGULACJI TEMPERATURY 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie studentów z pracą układu automatycznej regulacji temperatury 2. WPROWADZENIE Układy automatycznej
AiR_TR2_5/9 Teoria Regulacji II Control Theory II. Automatyka i Robotyka I stopień ogólno akademicki studia niestacjonarne
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Podstawy Automatyki. Wykład 13 - Wprowadzenie do układów sekwencyjnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Automatyzacja. Ćwiczenie 9. Transformata Laplace a sygnałów w układach automatycznej regulacji
 Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne
 Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne Krajczyński Edward Urządzenia nawigacji technicznej Fransiszek
Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne Krajczyński Edward Urządzenia nawigacji technicznej Fransiszek
ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI
 1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
Wzmacniacz operacyjny
 ELEKTRONIKA CYFROWA SPRAWOZDANIE NR 3 Wzmacniacz operacyjny Grupa 6 Aleksandra Gierut CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniaczy operacyjnych do przetwarzania
ELEKTRONIKA CYFROWA SPRAWOZDANIE NR 3 Wzmacniacz operacyjny Grupa 6 Aleksandra Gierut CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniaczy operacyjnych do przetwarzania
Sterowane źródło mocy
 Sterowane źródło mocy Iloczyn prądu i napięcia jest zawsze proporcjonalny (równy) do pewnej mocy p Źródła tego typu nie mogą być zwarte ani rozwarte Moc ujemna pochłanianie mocy W rozważanym podobwodzie
Sterowane źródło mocy Iloczyn prądu i napięcia jest zawsze proporcjonalny (równy) do pewnej mocy p Źródła tego typu nie mogą być zwarte ani rozwarte Moc ujemna pochłanianie mocy W rozważanym podobwodzie
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Regulator liniowo kwadratowy na przykładzie wahadła odwróconego
 Regulator liniowo kwadratowy na przykładzie wahadła odwróconego kwiecień 2012 Sterowanie Teoria Przykład wahadła na wózku Dany jest system dynamiczny postaci: ẋ = f (x, u) (1) y = h(x) (2) Naszym zadaniem
Regulator liniowo kwadratowy na przykładzie wahadła odwróconego kwiecień 2012 Sterowanie Teoria Przykład wahadła na wózku Dany jest system dynamiczny postaci: ẋ = f (x, u) (1) y = h(x) (2) Naszym zadaniem
Wzmacniacze, wzmacniacze operacyjne
 Wzmacniacze, wzmacniacze operacyjne Schemat ideowy wzmacniacza Współczynniki wzmocnienia: - napięciowy - k u =U wy /U we - prądowy - k i = I wy /I we - mocy - k p = P wy /P we >1 Wzmacniacz w układzie
Wzmacniacze, wzmacniacze operacyjne Schemat ideowy wzmacniacza Współczynniki wzmocnienia: - napięciowy - k u =U wy /U we - prądowy - k i = I wy /I we - mocy - k p = P wy /P we >1 Wzmacniacz w układzie
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Układy akwizycji danych. Komparatory napięcia Przykłady układów
 Układy akwizycji danych Komparatory napięcia Przykłady układów Komparatory napięcia 2 Po co komparator napięcia? 3 Po co komparator napięcia? Układy pomiarowe, automatyki 3 Po co komparator napięcia? Układy
Układy akwizycji danych Komparatory napięcia Przykłady układów Komparatory napięcia 2 Po co komparator napięcia? 3 Po co komparator napięcia? Układy pomiarowe, automatyki 3 Po co komparator napięcia? Układy
BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO
 Ćwiczenie 11 BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO 11.1 Cel ćwiczenia Celem ćwiczenia jest poznanie rodzajów, budowy i właściwości przerzutników astabilnych, monostabilnych oraz
Ćwiczenie 11 BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO 11.1 Cel ćwiczenia Celem ćwiczenia jest poznanie rodzajów, budowy i właściwości przerzutników astabilnych, monostabilnych oraz
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
UJEMNE SPRZĘŻENIE ZWROTNE wprowadzenie do ćwiczenia laboratoryjnego
 UJEMNE SPRZĘŻENIE ZWROTNE wprowadzenie do ćwiczenia laoratoryjnego Józef BOKSA 1. Uwagi ogólne...2 2. Podstawowe układy sprzężenia zwrotnego...2 3. Wpływ sprzężenia zwrotnego na właściwości wzmacniaczy...4
UJEMNE SPRZĘŻENIE ZWROTNE wprowadzenie do ćwiczenia laoratoryjnego Józef BOKSA 1. Uwagi ogólne...2 2. Podstawowe układy sprzężenia zwrotnego...2 3. Wpływ sprzężenia zwrotnego na właściwości wzmacniaczy...4
Projekt z przedmiotu Systemy akwizycji i przesyłania informacji. Temat pracy: Licznik binarny zliczający do 10.
 Projekt z przedmiotu Systemy akwizycji i przesyłania informacji Temat pracy: Licznik binarny zliczający do 10. Andrzej Kuś Aleksander Matusz Prowadzący: dr inż. Adam Stadler Układy cyfrowe przetwarzają
Projekt z przedmiotu Systemy akwizycji i przesyłania informacji Temat pracy: Licznik binarny zliczający do 10. Andrzej Kuś Aleksander Matusz Prowadzący: dr inż. Adam Stadler Układy cyfrowe przetwarzają
UWAGA 2. Wszystkie wyniki zapisywać na dysku Dane E: (dotyczy symulacji i pomiarów rzeczywistych)
") Cel ćwiczenia: Zapoznanie się z budową i zasadą działania regulatorów ciągłych oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z budową i zasadą działania regulatorów ciągłych oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
11. Dobór rodzaju, algorytmu i nastaw regulatora
 205 11. Dobór rodzaju, algorytmu i nastaw regulatora 11.1 Wybór rodzaju i algorytmu regulatora Poprawny wybór rodzaju regulatora i jego algorytmu uzależniony jest od znajomości (choćby przybliżonej) właściwości
205 11. Dobór rodzaju, algorytmu i nastaw regulatora 11.1 Wybór rodzaju i algorytmu regulatora Poprawny wybór rodzaju regulatora i jego algorytmu uzależniony jest od znajomości (choćby przybliżonej) właściwości
SYNTEZA UKŁADU DWUPOŁOŻENIOWEJ REGULACJI POZIOMU CIECZY W ZBIORNIKU
 Ćwiczenie SYNTEZA UKŁADU DWUPOŁOŻENIOWEJ REGULACJI POZIOMU CIECZY W ZBIORNIKU 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie studentów z pracą układu dwupołożeniowej regulacji poziomu cieczy w zbiorniku.
Ćwiczenie SYNTEZA UKŁADU DWUPOŁOŻENIOWEJ REGULACJI POZIOMU CIECZY W ZBIORNIKU 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie studentów z pracą układu dwupołożeniowej regulacji poziomu cieczy w zbiorniku.
PODSTAWY ELEKTRONIKI I TECHNIKI CYFROWEJ
 z 0 0-0-5 :56 PODSTAWY ELEKTONIKI I TECHNIKI CYFOWEJ opracowanie zagadnieo dwiczenie Badanie wzmacniaczy operacyjnych POLITECHNIKA KAKOWSKA Wydział Inżynierii Elektrycznej i Komputerowej Kierunek informatyka
z 0 0-0-5 :56 PODSTAWY ELEKTONIKI I TECHNIKI CYFOWEJ opracowanie zagadnieo dwiczenie Badanie wzmacniaczy operacyjnych POLITECHNIKA KAKOWSKA Wydział Inżynierii Elektrycznej i Komputerowej Kierunek informatyka
Instrukcja nr 6. Wzmacniacz operacyjny i jego aplikacje. AGH Zespół Mikroelektroniki Układy Elektroniczne J. Ostrowski, P. Dorosz Lab 6.
 Instrukcja nr 6 Wzmacniacz operacyjny i jego aplikacje AGH Zespół Mikroelektroniki Układy Elektroniczne J. Ostrowski, P. Dorosz Lab 6.1 Wzmacniacz operacyjny Wzmacniaczem operacyjnym nazywamy różnicowy
Instrukcja nr 6 Wzmacniacz operacyjny i jego aplikacje AGH Zespół Mikroelektroniki Układy Elektroniczne J. Ostrowski, P. Dorosz Lab 6.1 Wzmacniacz operacyjny Wzmacniaczem operacyjnym nazywamy różnicowy