Systemy Czasu Rzeczywistego (SCR)
|
|
|
- Amelia Marcinkowska
- 6 lat temu
- Przeglądów:
Transkrypt


1 ystmy Czasu Rzczywistgo (CR) Wyład 4: Świat analogowy a cyfrowy wprowadzni 2/2 Modlowani i symulacja w środowisu Matlab/imulin - podstawy ii2017 WYDZIAŁ ELEROECHNII I AUOMAYI AEDRA INŻYNIERII YEMÓW EROWANIA irun: Automatya i Robotya tudia stacjonarn I stopnia: ro II, smstr IV dr inż. omasz Rutowsi 2017
2 Plan wyładu Ors próbowania Uład strowania cyfrowgo: o próbowani, opóźninia Ja zbudować prosty rgulator cyfrowy: o równani różniczow a równani różnicow Coś więcj o rgulatorz PID Matalb/imulin szybi wprowadzni CR
3 Ja dobrać ors próbowania? Ors próbowania Prztwarzani ciągł µs Doładn strowani i modlowani, ułady ltryczn; sici nrgtyczn 0,5-20 ms tabilizacja systmów mocy, symulatory lotu, samochody Prztwarzani strowan zdarzniami Intrfjs człowi maszyna trowani systmami wysoigo poziomu ms Prztwarzani obrazów, rzczywistość lomuniacja wirtualna 0,5-1 s Monitorowani i strowani obitami: procsy chmiczn 1-3 s Rgulacja przpływu 1-5 s Ułady rgulacji ciśninia 5-10 s Ułady rgulacji poziomu s Ułady rgulacji tmpratury ystmy baz danych CR
4 Dlaczgo odpowidni wyznaczni orsu próbowania jst ważn? Zbyt długi ors próbowania prowadzi do narusznia twirdznia Nyquista, przz co nimożliwa staj się ronstrucja sygnału ciągłgo z sygnału dysrtngo Zbyt róti ors próbowania powoduj zwięszni obciążnia obliczniowgo procsora, co moż prowadzić do zwięsznia osztów sprzętu (platformy sprzętowj) i oprogramowania, tórgo cna typowo rośni wraz z wzrostm częstotliwości próbowania Ors próbowania jst jdnym z paramtrów nastawczych rgulatorów cyfrowych, od tórgo zalży jaość rgulacji CR
5 Uład strowania cyfrowgo - IO (a) (c) (a) CR np. omputr przmysłowy próbowani s CR
6 Uład rozproszongo strowania cyfrowgo - IO (a) Intr. sić. IEĆ A (c) Intr. sić. IEĆ B CR np. omputr przmysłowy CR
7 Uład rozproszongo strowania cyfrowgo - IO próbowani s opóźnini τ sa (a) Intr. sić. IEĆ A (c) Intr. sić. IEĆ B CR np. omputr przmysłowy opóźnini τ sb CR
8 Uład rozproszongo strowania cyfrowgo - IO (a) Intr. sić. IE EĆ (c) Intr. sić. CR np. omputr przmysłowy CR
9 Uład rozproszongo strowania cyfrowgo - IO próbowani s opóźnini τ sic (a) Intr. sić. IE EĆ (c) Intr. sić. CR np. omputr przmysłowy CR
10 Równani różniczow a równani różnicow Ja zbudować rgulator cyfrowy? CR
11 Równani różniczow a równani różnicow aprosymacja pochodnych Aprosymacja różnic w tył y t y ( ) ( ) d y t y y 1 dt ( ) ( ) ( ) 2 d y t y 2y 1 + y 2 dt ( ) ( ) ( ) ( ) 2 2 s M CR s - ors próbowania dysrtn chwil czasu
12 Równani różniczow a równani różnicow aprosymacja pochodnych Aprosymacja różnic w przód y t y ( ) ( ) d y t y + 1 y dt ( ) ( ) ( ) 2 d y t y + 2 2y y dt ( ) ( ) ( ) ( ) 2 2 s M CR s - ors próbowania
13 Równani różniczow a równani różnicow aprosymacja pochodnych Równani różniczow n-tgo rzędu ( ) ( ) ( ) ( ) ( ) ( ) ( ) n n 1 m m 1 d y t d y t dy t d u t d u t du t a n + a n n1 + + a n a 0y t = b m + b m m1 + + b m b0u t dt dt dt dt dt dt n a i d y t i i i = 0 dt j = 0 Równani różnicow m j ( ) d u ( t ) = b j dt j n > m ( ) + ( ) + + ( ) = ( ) + ( ) + + ( ) a y a y 1 a y n b u b u 1 b u m 0 1 n 0 1 m a m j j ( s ) u j ( s ) n i i y = i i = 0 s j = 0 s b - ors próbowania ( ) CR
14 Równani różniczow a równani różnicow przyład przształcania (aprosymacja różnic w tył ) Przształcić równani różniczow: dy( t) dt = a u( t) Na równani różnicow: y( ) =? y ( ) y( 1) = a u( ) CR ors próbowania ( ) = y( 1) + a u( ) y 14
15 Równani różnicow przyład aprosymacji całi (suma pól prostoątów) Równani: y 1 ( t) = u( τ ) Równani różnicow: t 0 dτ 1 y ( ) =? ( ) y = u( j) j CR ors próbowania 15
16 Równani ciągł a równani różnicow przyład psudoodu rgulatora (a) (c) (a) CR np. omputr przmysłowy próbowani s CR
17 Równani ciągł a równani różnicow przyład psudoodu rgulatora 01: ustawini zgara ta by gnrował przrwania priodyczn z orsm 02: począt pętli, po ażdym przrwaniu wyonaj opracj: 03: czytaj dan wjściow z prztworniów A/C 04: wyznacz wartość sygnału strującgo (np.: na bazi algorytmu rgulatora PID) 05: wystaw dan wyjściow do prztworniów C/A 06: onic pętli program w pętli nisończonj CR
18 Równani ciągł a równani różnicow przyład, ciągły rgulator PID Postać ciągła idalngo rgulatora PID: u t 1 d = dτ + d i dt 0 ( t) ( t) + ( τ ) gdzi: u(t) wilość strująca (t) uchyb strowania współczynni wzmocninia, i stała czasowa całowania (czas zdwojnia) d stała czasowa różniczowania (czas wyprzdznia) ( t) CR
19 Równani ciągł a równani różnicow przyład, cyfrowy rgulator PID Postać cyfrowa idalngo rgulatora PID (algorytm pozycyjny): u 1 d ( ) ( ) + ( j) + ( ( ) ( 1) ) = i j =00 postać nirurncyjna rgulatora aprosymacja części różniczującj poprzz przyrosty lwostronn aprosymacja części całującj poprzz sumę pól prostoątów - ors próbowania CR
20 Równani ciągł a równani różnicow przyład, cyfrowy rgulator PID strutura bloowa (ogólna) CR
21 Równani ciągł a równani różnicow przyład, cyfrowy rgulator PID strutura bloowa (Matlab/imulin) CR
22 Równani ciągł a równani różnicow przyład, cyfrowy rgulator PID (pozycyjny), psudood 01: s =???; p =???; i =???; d =???; 02: uchyb_poprzdni = 0; cała = 0; 04: for(;;) 05: wartość_wilości_zadanj = CZYAJ_AC1 (); 06: wartość_wilości_mirzonj = CZYAJ_AC2 (); 07: uchyb = wartość_wilości_zadanj - wartość_wilości_mirzonj; 08: cała = cała + uchyb * s; 09: pochodna = (uchyb - uchyb_poprzdni) / s; 10: strowani = p * uchyb + i * cała + d * pochodna; 11: uchyb_poprzdni = uchyb; // dlaczgo? 12: PIZ_CA1(strowani); 13: pauza( s - a ) // dlaczgo? 14: nd CR 2017 a czas wyonania linii 05-12; program w pętli nisończonj 22
23 Równani ciągł a równani różnicow przyład, cyfrowy rgulator PID Postać cyfrowa rgulatora PID (algorytm prędościowy): ( ) ( ) ( ) ( ) ( ) ( ) + + = = j u d j i CR i ( ) ( ) ( ) ( ) ( ) ( ) + + = = j u d j i ( ) ( )... 1 = u u - ors próbowania
24 Równani ciągł a równani różnicow przyład, cyfrowy rgulator PID ( ) ( ) ( ) ( ) = = j d d j i ( ) ( )... 1 = u u ( ) ( ) ( ) ( ) = + j d d CR = j i
25 Równani ciągł a równani różnicow przyład, cyfrowy rgulator PID ( ) ( ) ( ) ( ) = = j d d j i ( ) ( )... 1 = u u ( ) ( ) ( ) ( ) = + j d d CR = j i ( ) ( ) ( ) ( ) = = = j i j i d j j ( ) ( ) ( ) ( ) = + d d d
26 Równani ciągł a równani różnicow przyład, cyfrowy rgulator PID ( ) ( ) ( ) = i d ( ) ( ) ( ) = + d d ( ) ( ) ( ) = = d d d CR ( ) ( ) ( ) = = d d i d ( ) ( ) ( ) = b b b + = d b 1 0 = d i b d b = 2 + = i d b 2 1 1
27 Równani ciągł a równani różnicow przyład, cyfrowy rgulator PID ( ) ( ) ( ) ( ) ( ) = b b b u u ( ) ( ) ( ) ( ) ( ) = b b b u u CR ( ) ( ) ( ) ( ) ( ) = b b b u u + = d b = i d b d b = 2
28 Równani ciągł a równani różnicow przyład, cyfrowy rgulator PID (prędościowy), psudood 01: s =???; p =???; i =???; d =???; 02: // ZADANIE DOMOWE!!! 03: // CR 2017 program w pętli nisończonj 28
29 Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy wrsja szrgowa (prędościowa) rgulatora PID CR
30 Coś więcj o rgulatorz PID CR
31 Przyład ciągłgo rgulatora PID Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy u 1 = p dτ + ( t) ( t) + ( τ ) i t 0 d d( t) dt CR

32 Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy p = i = d = u 0.1 CR
33 Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy Uwzględnini możliwości/ogranicznia urządzń wyonawczych (problm z nasycniami związany z zbyt małą/dużą wartością sygnału strującgo gnrowango przz rgulator) CR

34 Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy p = i = d = u_sat 0.1 CR
35 Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy Jdn z wilu przyładów ralizacji ciągłgo rgulatora PID z filtrm anti-windup (przciwnasycniowym): ujmn sprzężni zwrotn objmując część całującą (ang. tracing anti-windup, bac-calculation) CR
36 Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy Jdn z wilu przyładów ralizacji ciągłgo rgulatora PID z filtrm anti-windup (przciwnasycniowym): ujmn sprzężni zwrotn objmując część całującą (ang. tracing anti-windup, bac-calculation) CR


37 Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy p = i = d = t = u_sat 0.1 CR
38 Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy Porównani działania uładu z rgulatorm bz (linia zilona) i z filtrm anti-windup, przciwnasycniowym (linia nibisa) u(t) czsccal. rg. I(t) y(t) czas t CR
39 Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy wrsja pozycyjna (równolgła) dysrtngo rgulatora PID z filtrm anti-windup CR
40 Coś więcj o rgulatorz PID - mchanizm przciwnasycniowy wrsja szrgowa (prędościowa) rgulatora PID z filtrm anti-windup CR
41 Dlaczgo przy analizi uładów strowania warto wyorzystywać środowiso Matlab/imulin? CR 2017
42 Jst to obcni najpopularnijsz środowiso symulacyjn zarówno w przmyśl ja i środowisu nauowym CR 2017 Ofruj szroi możliwości symulacji programowj i bogatą bibliotę funcji, procdur, przyborniów Wyorzystani możliwości środowisa Matlab/imulin ni musi ograniczać się jdyni do symulacji programowj Matlab/imulin jst równiż środowisim szybigo prototypowania i wryfiacji systmów wbudowanych Matalb/imiulin umożliwia symulacj w czasi rzczywistym
43 Modl tworznia systmu strowania Modlowani i symulacja Intgracja i tstowania zybi prototypowani ymulacja w pętli sprzętowj HIL (ang. Hardwar In th Loop) Implmntacja CR
44 CR 2017 Matlab/imulin bardzo szybi wprowadzni

45 CR 2017 Matlab/imulin bardzo szybi wprowadzni

46 CR 2017 Matlab/imulin bardzo szybi wprowadzni

47 CR 2017 Matlab/imulin bardzo szybi wprowadzni

48 CR 2017 Matlab/imulin bardzo szybi wprowadzni

49 CR 2017 Matlab/imulin bardzo szybi wprowadzni

50 CR 2017 Matlab/imulin bardzo szybi wprowadzni
51 CR 2017 Matlab/imulin bardzo szybi wprowadzni

52 CR 2017 Matlab/imulin bardzo szybi wprowadzni

53 CR 2017 Matlab/imulin bardzo szybi wprowadzni
54 CR 2017 Matlab/imulin bardzo szybi wprowadzni

55 CR 2017 Matlab/imulin bardzo szybi wprowadzni

56 CR 2017 Matlab/imulin bardzo szybi wprowadzni
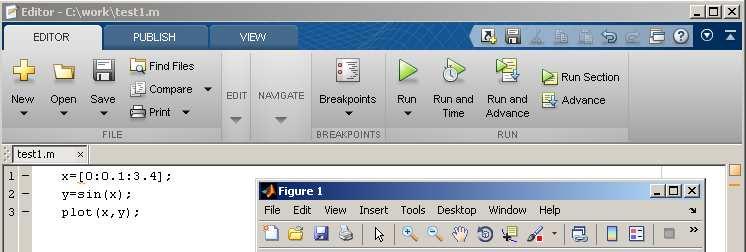
57 Matlab/imulin bardzo szybi wprowadzni Przyład 1 CR 2017


58 Matlab/imulin bardzo szybi wprowadzni Przyład 1 CR 2017


59 Matlab/imulin bardzo szybi wprowadzni Przyład 1 CR 2017

60 Matlab/imulin bardzo szybi wprowadzni Przyład 1 CR 2017

61 Matlab/imulin bardzo szybi wprowadzni Przyład 1 CR 2017
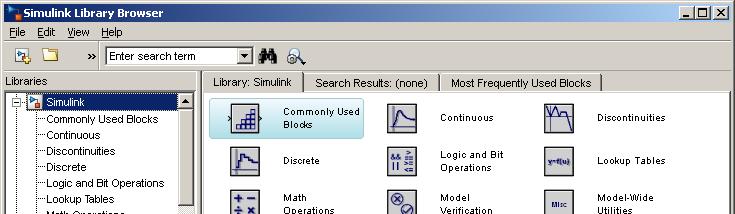
62 Matlab/imulin bardzo szybi wprowadzni Przyład 2 CR 2017

63 Matlab/imulin bardzo szybi wprowadzni Przyład 2 CR 2017

64 Matlab/imulin bardzo szybi wprowadzni Przyład 2 CR 2017

65 Matlab/imulin bardzo szybi wprowadzni Przyład 2 CR 2017
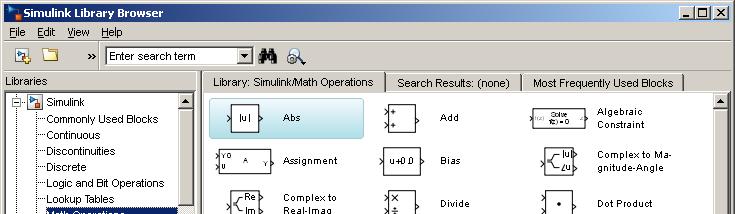
66 Matlab/imulin bardzo szybi wprowadzni Przyład 3 CR 2017


67 Matlab/imulin bardzo szybi wprowadzni Przyład 3 CR 2017
68 Matlab/imulin bardzo szybi wprowadzni Przyład 3 CR 2017

69 Matlab/imulin bardzo szybi wprowadzni Przyład 3 CR 2017
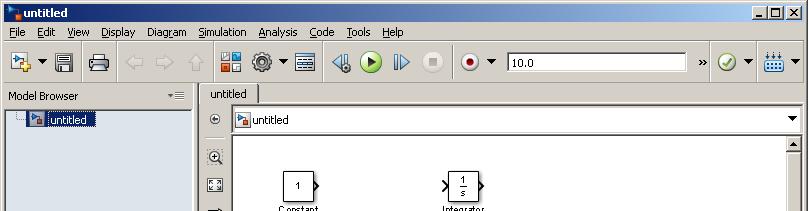
70 Matlab/imulin bardzo szybi wprowadzni - modl matmatyczny i symulacyjny systmu Modl matmatyczny obitu dany jst równanim: Przyład 4 Po lmntarnych przształcniach otrzymujmy modl matmatyczny w postaci: Natomiast modl analogowy przyjmuj formę: CR 2017
71 Matlab/imulin bardzo szybi wprowadzni - modl matmatyczny i symulacyjny systmu Modl symulacyjny w Matlab/imulin: Przyład 4 CR 2017


72 Matlab/imulin bardzo szybi wprowadzni - modl matmatyczny i symulacyjny systmu Modl symulacyjny w Matlab/imulin: Przyład 4 CR 2017

73 Matlab/imulin bardzo szybi wprowadzni - modl matmatyczny i symulacyjny systmu Modl symulacyjny w Matlab/imulin: Przyład 4 CR 2017


74 Matlab/imulin bardzo szybi wprowadzni - modl matmatyczny i symulacyjny systmu Modl symulacyjny w Matlab/imulin: Przyład 4 CR 2017


75 Matlab/imulin bardzo szybi wprowadzni - modl matmatyczny i symulacyjny systmu Przyład 4 CR 2017


76 Matlab/imulin bardzo szybi wprowadzni - modl matmatyczny i symulacyjny systmu Przyład 4 CR 2017
77 Ralizacja przyładowgo systmu strowania - uwzględnini prztworniów A/C i C/A Przyład 5 CR
78 Ralizacja przyładowgo systmu strowania - uwzględnini prztworniów A/C i C/A Przyład 5 CR
79 Ralizacja przyładowgo systmu strowania - uwzględnini prztworniów A/C i C/A CR


80 Ralizacja przyładowgo systmu strowania - uwzględnini prztworniów A/C i C/A Przyład 5 CR

81 Ralizacja przyładowgo systmu strowania - uwzględnini prztworniów A/C i C/A Przyład 5 CR



82 Ralizacja przyładowgo systmu strowania - uwzględnini prztworniów A/C i C/A CR
83 Ralizacja przyładowgo systmu strowania - uwzględnini prztworniów A/C i C/A Przyład 5 8-bitowy prztworni AC z różnymi orsami próbowania s s=0.01 s=0.05 s=0.1 CR
84 Bibliografia: [1] J. Brzóza (2002). Rgulatory cyfrow w automatyc. Wydawnictwo NIOM. [2] W. Grga(2004). Mtody i algorytmy strowania cyfrowgo w uładach scntralizowanych i rozproszonych. Wydawnictwa AGH raów. CR
85 Dzięuję za uwagę!!! CR
PODSTAWY AUTOMATYKI 6. Typowe obiekty i regulatory
 Politchnia Warszawsa Instytt Atomatyi i Robotyi Prof. dr hab. inż. Jan Macij Kościlny PODSAWY AUOMAYKI 6. yow obity i rglatory Obit rglacji 2 Dwojai sns: - rocs o orślonych własnościach statycznych i dynamicznych,
Politchnia Warszawsa Instytt Atomatyi i Robotyi Prof. dr hab. inż. Jan Macij Kościlny PODSAWY AUOMAYKI 6. yow obity i rglatory Obit rglacji 2 Dwojai sns: - rocs o orślonych własnościach statycznych i dynamicznych,
Ćwiczenie PA6. Badanie działania regulatora PID zaimplementowanego w sterowniku S7-1200 firmy Siemens
 INSYU AUOMAYKI i ROBOYKI WYDZIAŁ MECHARONIKI - laboratorium Ćwiczni PA6 Badani działania rgulatora PID zaimplmntowango w strowniu S7-00 firmy Simns Instrucja laboratoryjna Opracowani : dr inż. Danuta Holjo
INSYU AUOMAYKI i ROBOYKI WYDZIAŁ MECHARONIKI - laboratorium Ćwiczni PA6 Badani działania rgulatora PID zaimplmntowango w strowniu S7-00 firmy Simns Instrucja laboratoryjna Opracowani : dr inż. Danuta Holjo
Ćwiczenie 4. Realizacja programowa dwupołożeniowej regulacji temperatury pieca elektrycznego
 Ćwiczni 4 Ralizacja programowa dwupołożniowj rgulacji tmpratury pica lktryczngo. Cl ćwicznia Clm ćwicznia jst zaznajomini z podstawami rgulacji obiktów ciągłych na przykładzi strowania dwupołożniowgo komputrowgo
Ćwiczni 4 Ralizacja programowa dwupołożniowj rgulacji tmpratury pica lktryczngo. Cl ćwicznia Clm ćwicznia jst zaznajomini z podstawami rgulacji obiktów ciągłych na przykładzi strowania dwupołożniowgo komputrowgo
Automatyzacja Procesów Przemysłowych
 Automatyzacja Procsów Przmysłowych Tmat: Układ rgulacji zamknięto-otwarty Zspół: Kirunk i grupa: Data: Mikuś Marcin Mizra Marcin Łochowski Radosław Politowski Dariusz Szymański Zbigniw Piwowarski Przmysław
Automatyzacja Procsów Przmysłowych Tmat: Układ rgulacji zamknięto-otwarty Zspół: Kirunk i grupa: Data: Mikuś Marcin Mizra Marcin Łochowski Radosław Politowski Dariusz Szymański Zbigniw Piwowarski Przmysław
Szeregowy obwód RC - model matematyczny układu
 Akadmia Morska w Gdyni Katdra Automatyki Okrętowj Toria strowania Mirosław Tomra Na przykładzi szrgowgo obwodu lktryczngo składającgo się z dwóch lmntów pasywnych: rzystora R i kondnsatora C przdstawiony
Akadmia Morska w Gdyni Katdra Automatyki Okrętowj Toria strowania Mirosław Tomra Na przykładzi szrgowgo obwodu lktryczngo składającgo się z dwóch lmntów pasywnych: rzystora R i kondnsatora C przdstawiony
Wydział Elektryczny. Katedra Telekomunikacji i Aparatury Elektronicznej. Instrukcja do pracowni specjalistycznej
 Politchnika Białotocka Wydział Elktryczny Katdra Tlkomunikacji i Aparatury Elktronicznj Intrukcja do pracowni pcjalitycznj Tmat ćwicznia: Dokładność ciągłych i dykrtnych układów rgulacji Numr ćwicznia:
Politchnika Białotocka Wydział Elktryczny Katdra Tlkomunikacji i Aparatury Elktronicznj Intrukcja do pracowni pcjalitycznj Tmat ćwicznia: Dokładność ciągłych i dykrtnych układów rgulacji Numr ćwicznia:
W-24 (Jaroszewicz) 22 slajdy Na podstawie prezentacji prof. J. Rutkowskiego. Cząstka w studni potencjału. przykłady efektu tunelowego
 22 slajdy Na podstawie prezentacji prof. J. Rutkowskiego. Cząstka w studni potencjału. przykłady efektu tunelowego") Kyongju, Kora, April 999 W-4 (Jaroszwicz) slajdy Na podstawi przntacji prof. J. Rutowsigo Fizya wantowa 3 Cząsta w studni potncjału sończona studnia potncjału barira potncjału barira potncjału o sończonj
Kyongju, Kora, April 999 W-4 (Jaroszwicz) slajdy Na podstawi przntacji prof. J. Rutowsigo Fizya wantowa 3 Cząsta w studni potncjału sończona studnia potncjału barira potncjału barira potncjału o sończonj
PODSTAWY AUTOMATYKI 9. Wskaźniki jakości regulacji
 Politchnia Warawa Intytut Automatyi i obotyi Prof. dr hab. inż. Jan Macij Kościlny PDSTAWY AUTMATYKI 9. Waźnii jaości rgulacji Wymagania tawian uładom rgulacji 2 Stabilność Wymagania tatycn Wymagania dynamicn
Politchnia Warawa Intytut Automatyi i obotyi Prof. dr hab. inż. Jan Macij Kościlny PDSTAWY AUTMATYKI 9. Waźnii jaości rgulacji Wymagania tawian uładom rgulacji 2 Stabilność Wymagania tatycn Wymagania dynamicn
ZASTOSOWANIE METODY GRAFÓW WIĄZAŃ DO MODELOWANIA PRACY ZESPOŁU PRĄDOTWÓRCZEGO W SIŁOWNI OKRĘTOWEJ
 Chybowski L. Grzbiniak R. Matuszak Z. Maritim Acadmy zczcin Poland ZATOOWANIE METODY GRAFÓW WIĄZAŃ DO MODELOWANIA PRACY ZEPOŁU PRĄDOTWÓRCZEGO W IŁOWNI OKRĘTOWEJ ummary: Papr prsnts issus of application
Chybowski L. Grzbiniak R. Matuszak Z. Maritim Acadmy zczcin Poland ZATOOWANIE METODY GRAFÓW WIĄZAŃ DO MODELOWANIA PRACY ZEPOŁU PRĄDOTWÓRCZEGO W IŁOWNI OKRĘTOWEJ ummary: Papr prsnts issus of application
( ) + ( ) T ( ) + E IE E E. Obliczanie gradientu błędu metodą układu dołączonego
 + ( ) T ( ) + E IE E E. Obliczanie gradientu błędu metodą układu dołączonego") Obliczanie gradientu błędu metodą uładu dołączonego /9 Obliczanie gradientu błędu metodą uładu dołączonego Chodzi o wyznaczenie pochodnych cząstowych funcji błędu E względem parametrów elementów uładu
Obliczanie gradientu błędu metodą uładu dołączonego /9 Obliczanie gradientu błędu metodą uładu dołączonego Chodzi o wyznaczenie pochodnych cząstowych funcji błędu E względem parametrów elementów uładu
2. Architektury sztucznych sieci neuronowych
 - 8-2. Architktury sztucznych sici nuronowych 2.. Matmatyczny modl nuronu i prostj sici nuronowj Sztuczn sici nuronow są modlami inspirowanymi przz strukturę i zachowani prawdziwych nuronów. Podobni jak
- 8-2. Architktury sztucznych sici nuronowych 2.. Matmatyczny modl nuronu i prostj sici nuronowj Sztuczn sici nuronow są modlami inspirowanymi przz strukturę i zachowani prawdziwych nuronów. Podobni jak
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Teoria Sygnałów. II Inżynieria Obliczeniowa. Wykład 13
 Toria Sygałów II Iżyiria Oblicziowa Wyład 3 Filtr adaptacyjy dostraja się do zmiych waruów pracy. Filtr tai posiadają dwa sygały wjściow. Pirwszym jst sygał poddaway filtracji x(). Drugim ta zway sygał
Toria Sygałów II Iżyiria Oblicziowa Wyład 3 Filtr adaptacyjy dostraja się do zmiych waruów pracy. Filtr tai posiadają dwa sygały wjściow. Pirwszym jst sygał poddaway filtracji x(). Drugim ta zway sygał
Podstawy Automatyki Zbiór zadań dla studentów II roku AiR oraz MiBM
 Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Elektroniczne systemy bezpieczeństwa mogą występować w trzech rodzajach struktur. Są to struktury typu: - skupionego, - rozproszonego, - mieszanego.
 A. Cl ćwicznia Clm ćwicznia jst zapoznani się z wskaźnikami nizawodnościowymi lktronicznych systmów bzpiczństwa oraz wykorzystanim ich do optymalizacji struktury nizawodnościowj systmu.. Część tortyczna
A. Cl ćwicznia Clm ćwicznia jst zapoznani się z wskaźnikami nizawodnościowymi lktronicznych systmów bzpiczństwa oraz wykorzystanim ich do optymalizacji struktury nizawodnościowj systmu.. Część tortyczna
ANALIZA FOURIEROWSKA szybkie transformaty Fouriera
 AALIZA FOURIEROWSKA szybi trasformaty Fourira dowola fuję priodyzą F( w zasi lub przstrzi (tx, ors T) moża przdstawić jao () F( b o + [ a si( + b os( ] gdzi π / T lub ω zauważmy, ż ω, jst ajiższą zęstośią
AALIZA FOURIEROWSKA szybi trasformaty Fourira dowola fuję priodyzą F( w zasi lub przstrzi (tx, ors T) moża przdstawić jao () F( b o + [ a si( + b os( ] gdzi π / T lub ω zauważmy, ż ω, jst ajiższą zęstośią
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Wykład VIII: Odkształcenie materiałów - właściwości sprężyste
 Wykład VIII: Odkształcni matriałów - właściwości sprężyst JERZY LI Wydział Inżynirii Matriałowj i ramiki Katdra Tchnologii ramiki i Matriałów Ogniotrwałych Trść wykładu: 1. Właściwości matriałów wprowadzni
Wykład VIII: Odkształcni matriałów - właściwości sprężyst JERZY LI Wydział Inżynirii Matriałowj i ramiki Katdra Tchnologii ramiki i Matriałów Ogniotrwałych Trść wykładu: 1. Właściwości matriałów wprowadzni
Przetwarzanie sygnałów biomedycznych
 Prztwarzani sygnałów biomdycznych dr hab. inż. Krzysztof Kałużyński, prof. PW Człowik- najlpsza inwstycja Projkt współfinansowany przz Unię Europjską w ramach Europjskigo Funduszu Społczngo Wykład XI Filtracja
Prztwarzani sygnałów biomdycznych dr hab. inż. Krzysztof Kałużyński, prof. PW Człowik- najlpsza inwstycja Projkt współfinansowany przz Unię Europjską w ramach Europjskigo Funduszu Społczngo Wykład XI Filtracja
Laboratorium Półprzewodniki Dielektryki Magnetyki Ćwiczenie nr 11 Badanie materiałów ferromagnetycznych
 Laboratorium Półprzwodniki Dilktryki Magntyki Ćwiczni nr Badani matriałów frromagntycznych I. Zagadninia do przygotowania:. Podstawow wilkości charaktryzując matriały magntyczn. Związki pomiędzy B, H i
Laboratorium Półprzwodniki Dilktryki Magntyki Ćwiczni nr Badani matriałów frromagntycznych I. Zagadninia do przygotowania:. Podstawow wilkości charaktryzując matriały magntyczn. Związki pomiędzy B, H i
1. Opis teoretyczny regulatora i obiektu z opóźnieniem.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
Teoria struktury kapitału
 Toria strutury apitału Dr Tomasz Słońsi Toria strutury apitału, Moigliani-Millr (MM), Nobl w zizini onomii Powaliny nowoczsnj torii strutury apitału zostały położon w rou 1958 w molu, tóry opirał się o
Toria strutury apitału Dr Tomasz Słońsi Toria strutury apitału, Moigliani-Millr (MM), Nobl w zizini onomii Powaliny nowoczsnj torii strutury apitału zostały położon w rou 1958 w molu, tóry opirał się o
POLITECHNIKA GDAŃSKA Wydział Elektrotechniki i Automatyki Katedra Energoelektroniki i Maszyn Elektrycznych LABORATORIUM
 POLITECHNIKA GDAŃSKA Wydział Elktrotchniki i Automatyki Katdra Enrgolktroniki i Maszyn Elktrycznych LABORATORIUM SYSTEMY ELEKTROMECHANICZNE TEMATYKA ĆWICZENIA MASZYNA SYNCHRONICZNA BADANIE PRACY W SYSTEMIE
POLITECHNIKA GDAŃSKA Wydział Elktrotchniki i Automatyki Katdra Enrgolktroniki i Maszyn Elktrycznych LABORATORIUM SYSTEMY ELEKTROMECHANICZNE TEMATYKA ĆWICZENIA MASZYNA SYNCHRONICZNA BADANIE PRACY W SYSTEMIE
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
6. Dynamika Stan równowagi. ρb(x, y, z) V n t d. Siły
 V n t d. Siły") 6. Dynamika P.Pluciński 6. Dynamika 6.1. tan równowagi t ρb d x, y, z P ρüx, y, z ρbx, y, z z n t d x y iły ρb wktor gęstości sił masowych [N/m 3 ] ρb d wktor gęstości sił masowych tłuminia [N/m 3 ] ρü
6. Dynamika P.Pluciński 6. Dynamika 6.1. tan równowagi t ρb d x, y, z P ρüx, y, z ρbx, y, z z n t d x y iły ρb wktor gęstości sił masowych [N/m 3 ] ρb d wktor gęstości sił masowych tłuminia [N/m 3 ] ρü
PLAN WYKŁADU. Równanie Clausiusa-Clapeyrona 1 /21
 PAN WYKŁADU Równani Clausiusa-Clapyrona 1 /1 Podręczniki Salby, Chaptr 4 C&W, Chaptr 4 R&Y, Chaptr /1 p (mb) 1 C Fusion iquid Solid 113 6.11 Vapor 1 374 (ºC) Kropl chmurow powstają wtdy kidy zostani osiągnięty
PAN WYKŁADU Równani Clausiusa-Clapyrona 1 /1 Podręczniki Salby, Chaptr 4 C&W, Chaptr 4 R&Y, Chaptr /1 p (mb) 1 C Fusion iquid Solid 113 6.11 Vapor 1 374 (ºC) Kropl chmurow powstają wtdy kidy zostani osiągnięty
Zakład Ubezpieczeń Społecznych Departament Zamówień Publicznych ul. Szamocka 3, 5, 01-748 Warszawa tel: 22 667 17 04, fax: 22 667 17 33
 Zakład Ubzpiczń Społcznych Dpartamnt Zamówiń Publicznych ul. Szamocka 3, 5, 01-748 Warszawa tl: 22 667 17 04, fax: 22 667 17 33 993200/271/IN- 268/15 Warszawa, dnia 19.03.2015 r. Informacja dla Wykonawców,
Zakład Ubzpiczń Społcznych Dpartamnt Zamówiń Publicznych ul. Szamocka 3, 5, 01-748 Warszawa tl: 22 667 17 04, fax: 22 667 17 33 993200/271/IN- 268/15 Warszawa, dnia 19.03.2015 r. Informacja dla Wykonawców,
Przemysłowy przetwornik ciśnienia
 Przmysłowy prztwornik ciśninia Szwajcarska firma Trafag jst wiodącym międzynarodowym dostawcą wysokij jakości czujników oraz mirników do pomiaru ciśninia oraz tmpratury. Przmysłowy prztwornik ciśninia,
Przmysłowy prztwornik ciśninia Szwajcarska firma Trafag jst wiodącym międzynarodowym dostawcą wysokij jakości czujników oraz mirników do pomiaru ciśninia oraz tmpratury. Przmysłowy prztwornik ciśninia,
MODYFIKACJA KOSZTOWA ALGORYTMU JOHNSONA DO SZEREGOWANIA ZADAŃ BUDOWLANYCH
 MODYFICJ OSZTOW LGORYTMU JOHNSON DO SZEREGOWNI ZDŃ UDOWLNYCH Michał RZEMIŃSI, Paweł NOW a a Wydział Inżynierii Lądowej, Załad Inżynierii Producji i Zarządzania w udownictwie, ul. rmii Ludowej 6, -67 Warszawa
MODYFICJ OSZTOW LGORYTMU JOHNSON DO SZEREGOWNI ZDŃ UDOWLNYCH Michał RZEMIŃSI, Paweł NOW a a Wydział Inżynierii Lądowej, Załad Inżynierii Producji i Zarządzania w udownictwie, ul. rmii Ludowej 6, -67 Warszawa
Identyfikacja osób na podstawie zdjęć twarzy
 Idntyfikacja osób na podstawi zdjęć twarzy d r i n ż. Ja c k Na r u n i c m gr i n ż. Ma r k Kowa l s k i C i k a w p r o j k t y W y d z i a ł E l k t r o n i k i i T c h n i k I n f o r m a c y j n y
Idntyfikacja osób na podstawi zdjęć twarzy d r i n ż. Ja c k Na r u n i c m gr i n ż. Ma r k Kowa l s k i C i k a w p r o j k t y W y d z i a ł E l k t r o n i k i i T c h n i k I n f o r m a c y j n y
Zastosowania programowalnych układów analogowych isppac
 Zastosowania programowalnych uładów analogowych isppac 0..80 strutura uładu "uniwersalnego" isppac0 ułady nadzorujące na isppac0, 30 programowanie filtrów na isppac 80 analiza częstotliwościowa projetowanych
Zastosowania programowalnych uładów analogowych isppac 0..80 strutura uładu "uniwersalnego" isppac0 ułady nadzorujące na isppac0, 30 programowanie filtrów na isppac 80 analiza częstotliwościowa projetowanych
Przykład 1 modelowania jednowymiarowego przepływu ciepła
 Przykład 1 modlowania jdnowymiarowgo przpływu cipła 1. Modl przpływu przz ścianę wilowarstwową Ściana składa się trzch warstw o różnych grubościach wykonana z różnych matriałów. Na jdnj z ścian zwnętrznych
Przykład 1 modlowania jdnowymiarowgo przpływu cipła 1. Modl przpływu przz ścianę wilowarstwową Ściana składa się trzch warstw o różnych grubościach wykonana z różnych matriałów. Na jdnj z ścian zwnętrznych
EKONOMETRIA. Ekonometryczne modele specjalne. Zbigniew.Tarapata zbigniew.tarapata.akcja.pl/p_ekonometria/ tel.
 EKONOMETRIA Tmat wykładu: Ekonomtryczn modl spcjaln Prowadzący: dr inż. Zbigniw TARAPATA -mail: Zbigniw.Tarapata Tarapata@isi.wat..wat.du.pl http:// zbigniw.tarapata.akcja.pl/p_konomtria/ tl.: 0-606-45-54-80
EKONOMETRIA Tmat wykładu: Ekonomtryczn modl spcjaln Prowadzący: dr inż. Zbigniw TARAPATA -mail: Zbigniw.Tarapata Tarapata@isi.wat..wat.du.pl http:// zbigniw.tarapata.akcja.pl/p_konomtria/ tl.: 0-606-45-54-80
PRACA DOKTORSKA ANALIZA DYNAMICZNYCH I USTALONYCH STANÓW PRACY SILNIKA RELUKTANCYJNEGO MGR INŻ. JANUSZ KOŁODZIEJ ZE STRUMIENIEM POPRZECZNYM
 POLITECHNIKA OPOLSKA WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI MGR INŻ. JANUSZ KOŁODZIEJ ANALIZA DYNAMICZNYCH I USTALONYCH STANÓW PRACY SILNIKA RELUKTANCYJNEGO ZE STRUMIENIEM POPRZECZNYM PRACA
POLITECHNIKA OPOLSKA WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI MGR INŻ. JANUSZ KOŁODZIEJ ANALIZA DYNAMICZNYCH I USTALONYCH STANÓW PRACY SILNIKA RELUKTANCYJNEGO ZE STRUMIENIEM POPRZECZNYM PRACA
Model Predictive Control
 Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 1 Plan wykładu Część I:
Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 1 Plan wykładu Część I:
WZMACNIACZE OPERACYJNE Instrukcja do zajęć laboratoryjnych
 WZMACNIACZE OPERACYJNE Instrukcja do zajęć laboratoryjnych Tematem ćwiczenia są zastosowania wzmacniaczy operacyjnych w układach przetwarzania sygnałów analogowych. Ćwiczenie składa się z dwóch części:
WZMACNIACZE OPERACYJNE Instrukcja do zajęć laboratoryjnych Tematem ćwiczenia są zastosowania wzmacniaczy operacyjnych w układach przetwarzania sygnałów analogowych. Ćwiczenie składa się z dwóch części:
Ekscytony Wanniera Motta
 ozpatrzmy oddziaływani lktronu o wktorz falowym bliskim minimum pasma przwodnictwa oraz dziury z obszaru blisko wirzcołka pasma walncyjngo. Zakładamy, ż oba pasma są sfryczni symtryczn, a ic kstrma znajdują
ozpatrzmy oddziaływani lktronu o wktorz falowym bliskim minimum pasma przwodnictwa oraz dziury z obszaru blisko wirzcołka pasma walncyjngo. Zakładamy, ż oba pasma są sfryczni symtryczn, a ic kstrma znajdują
Dla naszego obiektu ciągłego: przy czasie próbkowania T p =2.
 1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
CHARAKTERYSTYKI CZASOWE UKŁADÓW DYNAMICZNYCH
 CHARAKERYSYKI CZASOWE UKŁADÓW DYNAMICZNYCH Zadani Chararyyi czaow uładów. Odpowidź oową wyznacza ię z wzoru: { } Problm: h L G X Wyznaczyć odpowidz oową i impulową całującgo z inrcją G h L G gdzi: Y X
CHARAKERYSYKI CZASOWE UKŁADÓW DYNAMICZNYCH Zadani Chararyyi czaow uładów. Odpowidź oową wyznacza ię z wzoru: { } Problm: h L G X Wyznaczyć odpowidz oową i impulową całującgo z inrcją G h L G gdzi: Y X
Przetworniki ciśnienia przylegający z przodu
 FPT 85 Prztworniki ciśninia przylgający z przodu Szwajcarska firma Trafag jst wiodącym międzynarodowym dostawcą wysokij jakości czujników oraz mirników do pomiaru ciśninia oraz tmpratury. Przylgający z
FPT 85 Prztworniki ciśninia przylgający z przodu Szwajcarska firma Trafag jst wiodącym międzynarodowym dostawcą wysokij jakości czujników oraz mirników do pomiaru ciśninia oraz tmpratury. Przylgający z
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Metody numeryczne. Różniczkowanie. Wykład nr 6. dr hab. Piotr Fronczak
 Mtod numrczn Wład nr 6 Różnczowan dr ab. Potr Froncza Różnczowan numrczn Wzor różnczowana numrczngo znajdują zastosowan wtd, gd trzba wznaczć pocodn odpowdngo rzędu uncj, tóra orślona jst tablcą lub ma
Mtod numrczn Wład nr 6 Różnczowan dr ab. Potr Froncza Różnczowan numrczn Wzor różnczowana numrczngo znajdują zastosowan wtd, gd trzba wznaczć pocodn odpowdngo rzędu uncj, tóra orślona jst tablcą lub ma
 Michał Brzozowski Wykład 40 h Makrokonomia zaawansowana Część I: Ekonomia Montarna Dyżur: onidziałki.30 2.45, p. 409 E-mail: brzozowski@wn.uw.du.pl http://coin.wn.uw.du.pl/brzozowski lan wykładu. Czym
Michał Brzozowski Wykład 40 h Makrokonomia zaawansowana Część I: Ekonomia Montarna Dyżur: onidziałki.30 2.45, p. 409 E-mail: brzozowski@wn.uw.du.pl http://coin.wn.uw.du.pl/brzozowski lan wykładu. Czym
Komitet Główny Olimpiady Fizycznej, Waldemar Gorzkowski: Olimpiady fizyczne XXIII i XXIV. WSiP, Warszawa 1977.
 XXV OLMPADA FZYCZNA (1974/1975). Stopiń, zadani doświadczaln D Źródło: Nazwa zadania: Działy: Słowa kluczow: Komitt Główny Olimpiady Fizycznj, Waldmar Gorzkowski: Olimpiady fizyczn XX i XXV. WSiP, Warszawa
XXV OLMPADA FZYCZNA (1974/1975). Stopiń, zadani doświadczaln D Źródło: Nazwa zadania: Działy: Słowa kluczow: Komitt Główny Olimpiady Fizycznj, Waldmar Gorzkowski: Olimpiady fizyczn XX i XXV. WSiP, Warszawa
Granica funkcji - Lucjan Kowalski GRANICA FUNKCJI
 GRANICA FUNKCJI Granica uncji. - dowolna liczba rzczywista. O, = - ; + - otoczni liczby puntu o prominiu, S, = - ;, + - sąsidztwo liczby puntu o prominiu, Nich uncja będzi orślona w sąsidztwi puntu, g
GRANICA FUNKCJI Granica uncji. - dowolna liczba rzczywista. O, = - ; + - otoczni liczby puntu o prominiu, S, = - ;, + - sąsidztwo liczby puntu o prominiu, Nich uncja będzi orślona w sąsidztwi puntu, g
Sieci neuronowe - uczenie
 Sici nuronow - uczni http://zajcia.jakubw.pl/nai/ Prcptron - przypomnini x x x n w w w n wi xi θ y w p. p. y Uczni prcptronu Przykład: rozpoznawani znaków 36 wjść Wyjści:, jśli na wjściu pojawia się litra
Sici nuronow - uczni http://zajcia.jakubw.pl/nai/ Prcptron - przypomnini x x x n w w w n wi xi θ y w p. p. y Uczni prcptronu Przykład: rozpoznawani znaków 36 wjść Wyjści:, jśli na wjściu pojawia się litra
Metoda Elementów Skończonych w Modelowaniu Układów Mechatronicznych. Układy prętowe (Scilab)
") Mtoda Elmntów Skończonych w Modlowaniu Układów Mchatronicznych Układy prętow (Scilab) str.1 I. MES 1D układy prętow. Podstawow informacj Istotą mtody lmntów skończonych jst sposób aproksymacji cząstkowych
Mtoda Elmntów Skończonych w Modlowaniu Układów Mchatronicznych Układy prętow (Scilab) str.1 I. MES 1D układy prętow. Podstawow informacj Istotą mtody lmntów skończonych jst sposób aproksymacji cząstkowych
Automatyka i sterowanie w gazownictwie. Regulatory w układach regulacji
 Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Plan studiów dla kierunku: ELEKTRONIKA I TELEKOMUNIKACJA Załącznik nr 10 Studia stacjonarne inżynierskie Cyfrowe przetwarzanie sygnałów
 Kod Plan studiów dla kierunku: ELEKTRONIKA I TELEKOMUNIKACJA Załącznik nr 10 Studia stacjonarne inżynierskie Cyfrowe przetwarzanie sygnałów E Z Sh W C L S P W C L S P ECTS W C L S P ECTS W C L S P ECTS
Kod Plan studiów dla kierunku: ELEKTRONIKA I TELEKOMUNIKACJA Załącznik nr 10 Studia stacjonarne inżynierskie Cyfrowe przetwarzanie sygnałów E Z Sh W C L S P W C L S P ECTS W C L S P ECTS W C L S P ECTS
cos(ωt) ω ( ) 1 cos ω sin(ωt)dt = sin(ωt) ω cos(ωt)dt i 1 = sin ω i ( 1 cos ω ω 1 e iωt dt = e iωt iω II sposób: ˆf(ω) = 1 = e iω 1 = i(e iω 1) i ω
 ω ( ) 1 cos ω sin(ωt)dt = sin(ωt) ω cos(ωt)dt i 1 = sin ω i ( 1 cos ω ω 1 e iωt dt = e iωt iω II sposób: ˆf(ω) = 1 = e iω 1 = i(e iω 1) i ω") Rachunk prawdopodobiństwa MAP6 Wydział Elktroniki, rok akad. 8/9, sm. ltni Wykładowca: dr hab. A. Jurlwicz Przykłady do listy : Transformata Fourira Przykłady do zadania. : Korzystając z dfinicji wyznaczyć
Rachunk prawdopodobiństwa MAP6 Wydział Elktroniki, rok akad. 8/9, sm. ltni Wykładowca: dr hab. A. Jurlwicz Przykłady do listy : Transformata Fourira Przykłady do zadania. : Korzystając z dfinicji wyznaczyć
2009 ZARZĄDZANIE. LUTY 2009
 Wybran zstawy gzaminacyjn kursu Matmatyka na Wydzial ZF Uniwrsyttu Ekonomiczngo w Wrocławiu w latach 009 06 Zstawy dotyczą trybu stacjonarngo Niktór zstawy zawirają kompltn rozwiązania Zakrs matriału w
Wybran zstawy gzaminacyjn kursu Matmatyka na Wydzial ZF Uniwrsyttu Ekonomiczngo w Wrocławiu w latach 009 06 Zstawy dotyczą trybu stacjonarngo Niktór zstawy zawirają kompltn rozwiązania Zakrs matriału w
Rozwiązanie równania różniczkowego MES
 Rozwiązani równania różniczkowgo MES Jrzy Pamin -mail: jpamin@l5.pk.du.pl Instytut Tchnologii Informatycznych w Inżynirii Lądowj Wydział Inżynirii Lądowj Politchniki Krakowskij Strona domowa: www.l5.pk.du.pl
Rozwiązani równania różniczkowgo MES Jrzy Pamin -mail: jpamin@l5.pk.du.pl Instytut Tchnologii Informatycznych w Inżynirii Lądowj Wydział Inżynirii Lądowj Politchniki Krakowskij Strona domowa: www.l5.pk.du.pl
Metody integracji systemów sterowania z wykorzystaniem standardu OPC
 Metody integracji systemów sterowania z wykorzystaniem standardu OPC (Control Systems Integration using OPC Standard) Autor: Marcin BAJER Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
Metody integracji systemów sterowania z wykorzystaniem standardu OPC (Control Systems Integration using OPC Standard) Autor: Marcin BAJER Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
MECHATRONIKA UKŁADY REGULACJI
 OLITECHNIA OOLSA atdra Mchaniki i odstaw onstrukcji Maszyn MECHATRONIA ŁADY REGLACJI Rgulacja - dfinicj Schmat blokowy układu strowania Rgulator automatyczny jst urządznim, którgo zadanim jst strowani
OLITECHNIA OOLSA atdra Mchaniki i odstaw onstrukcji Maszyn MECHATRONIA ŁADY REGLACJI Rgulacja - dfinicj Schmat blokowy układu strowania Rgulator automatyczny jst urządznim, którgo zadanim jst strowani
ZASTOSOWANIA POCHODNEJ
 ZASTOSOWANIA POCODNEJ Ruła d l'ospitala. Nich, - różniczkowa w pwnym sąsidztwi punktu oraz lub istnij skończona lub niwłaściwa ranica wtdy Uwaa. Powyższ twirdzni jst równiż prawdziw dla ranic jdnostronnych
ZASTOSOWANIA POCODNEJ Ruła d l'ospitala. Nich, - różniczkowa w pwnym sąsidztwi punktu oraz lub istnij skończona lub niwłaściwa ranica wtdy Uwaa. Powyższ twirdzni jst równiż prawdziw dla ranic jdnostronnych
Załącznik 5.1 Analiza statystyczna wyników badania dotyczącego zarządzania ryzykiem w przedsiębiorstwach
 Załącznik 5.1 Analiza statystyczna wyników badania dotyczącgo zarządzania ryzykim w przdsiębiorstwach Spis trści Liczba pracowników w jdnostc lokalnj... 5 A.Przyczyny źródłow... 8 A1. Zarządzani BHP, w
Załącznik 5.1 Analiza statystyczna wyników badania dotyczącgo zarządzania ryzykim w przdsiębiorstwach Spis trści Liczba pracowników w jdnostc lokalnj... 5 A.Przyczyny źródłow... 8 A1. Zarządzani BHP, w
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
CHARAKTERYSTYKA OBCIĄŻENIOWA
 Opracowani: dr inż. Ewa Fudalj-Kostrzwa CHARAKTERYSTYKA OBCIĄŻENIOWA Charaktrystyki obciążniow są wyznaczan w ramach klasycznych statycznych badań silników zarówno dla silników o zapłoni iskrowym jak i
Opracowani: dr inż. Ewa Fudalj-Kostrzwa CHARAKTERYSTYKA OBCIĄŻENIOWA Charaktrystyki obciążniow są wyznaczan w ramach klasycznych statycznych badań silników zarówno dla silników o zapłoni iskrowym jak i
Wartość rynku odpadów komunalnych w Polsce szacowana jest na około 6-7 mld złotych
 Sminarium Brytyjsko-Polskij Izby Handlowj Gospodarowani odpadami komunalnymi Jak pobudzić publiczn i prywatn inwstycj w sktorz trmiczngo przkształcania odpadów? 13 maja 2014 r. Wartość rynku odpadów komunalnych
Sminarium Brytyjsko-Polskij Izby Handlowj Gospodarowani odpadami komunalnymi Jak pobudzić publiczn i prywatn inwstycj w sktorz trmiczngo przkształcania odpadów? 13 maja 2014 r. Wartość rynku odpadów komunalnych
REGULAMIN PRZYJMOWANIA I PRZEKAZYWANIA ZLECEŃ NABYCIA LUB ZBYCIA INSTRUMENTÓW FINANSOWYCH PRZEZ EFIX DOM MAKLERSKI S.A.
 REGULAMIN PRZYJMOWANIA I PRZEKAZYWANIA ZLECEŃ NABYCIA LUB ZBYCIA INSTRUMENTÓW FINANSOWYCH PRZEZ EFIX DOM MAKLERSKI S.A. Rozdział I. POSTANOWIENIA OGÓLNE 1. Rgulamin okrśla zasady przyjmowania i przkazywania
REGULAMIN PRZYJMOWANIA I PRZEKAZYWANIA ZLECEŃ NABYCIA LUB ZBYCIA INSTRUMENTÓW FINANSOWYCH PRZEZ EFIX DOM MAKLERSKI S.A. Rozdział I. POSTANOWIENIA OGÓLNE 1. Rgulamin okrśla zasady przyjmowania i przkazywania
Inżynieria Bezpieczeństwa I stopień (I stopień / II stopień) ogólnoakademicki (ogólnoakademicki / praktyczny)
 ogólnoakademicki (ogólnoakademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Transmitancje układów ciągłych
 Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Politechnika Poznańska, Katedra Sterowania i Inżynierii Systemów Wykłady 3,4, str. 1
 Poliechnia Poznańsa, Kaedra Serowania i Inżynierii Sysemów Wyłady 3,4, sr. 5. Charaerysyi logarymiczne (wyresy Bodego) Lm(ω) = 20 lg G(jω) [db = decybel] (20) (Lm(ω) = [db] 20 lg G(jω) = G(jω) = 0 /20,22
Poliechnia Poznańsa, Kaedra Serowania i Inżynierii Sysemów Wyłady 3,4, sr. 5. Charaerysyi logarymiczne (wyresy Bodego) Lm(ω) = 20 lg G(jω) [db = decybel] (20) (Lm(ω) = [db] 20 lg G(jω) = G(jω) = 0 /20,22
POLITECHNIKA WARSZAWSKA WYDZIAŁ TRANSPORTU
 POLITECHNIKA WARSZAWSKA WYDZIAŁ TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE EKSPLOATACJA SYSTEMÓW TELEKOMUNIKACYJNYCH LAORATORIUM Program,,Wspomagani Dcyzji Nizawodnościowo- Eksploaacyjnych Transporowych
POLITECHNIKA WARSZAWSKA WYDZIAŁ TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE EKSPLOATACJA SYSTEMÓW TELEKOMUNIKACYJNYCH LAORATORIUM Program,,Wspomagani Dcyzji Nizawodnościowo- Eksploaacyjnych Transporowych
Ocena wpływu stanów dynamicznych silnika spalinowego na jego właściwości użytkowe
 Prof. dr hab. inż. Zdzisław Chłopk Instytut Pojazdów, Wydział Samochodów i Maszyn Roboczych, Politchnika Warszawska ul. Narbutta 84, 2-524 Warszawa E-mail: zchlopk@simr.pw.du.pl Mgr inż. Jack Bidrzycki
Prof. dr hab. inż. Zdzisław Chłopk Instytut Pojazdów, Wydział Samochodów i Maszyn Roboczych, Politchnika Warszawska ul. Narbutta 84, 2-524 Warszawa E-mail: zchlopk@simr.pw.du.pl Mgr inż. Jack Bidrzycki
Wydział Zarządzania UŁ Logistyka II Ogólnoakademicki Studia II stopnia Stacjonarne
 PLAN STUDÓW Wydział: Kirunk studiów: Stopiń studiów: studiów: Liczba spcjalności: Logistyka Ogólnoakadmicki Studia stopnia Stacjonarn 08 rok smprzdmiot monografi czny audytoryj konwrsat n oryjn symulacyj
PLAN STUDÓW Wydział: Kirunk studiów: Stopiń studiów: studiów: Liczba spcjalności: Logistyka Ogólnoakadmicki Studia stopnia Stacjonarn 08 rok smprzdmiot monografi czny audytoryj konwrsat n oryjn symulacyj
PAiTM. materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż.
 PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
ZESPÓŁ B-D ELEKTROTECHNIKI
 ZESÓŁ B-D ELEKTOTECHNIKI Laboratorium Elktrotchniki i Elktroniki Samochodowj Tmat ćwicznia: Badani rozrusznika Opracowani: dr hab. inż. S. DUE 1. Instrukcja Laboratoryjna 2 omiary wykonan: a) omiar napięcia
ZESÓŁ B-D ELEKTOTECHNIKI Laboratorium Elktrotchniki i Elktroniki Samochodowj Tmat ćwicznia: Badani rozrusznika Opracowani: dr hab. inż. S. DUE 1. Instrukcja Laboratoryjna 2 omiary wykonan: a) omiar napięcia
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 EORI OBWODÓW I SYGNŁÓW LBORORIUM KDEMI MORSK Katedra eleomuniacji Morsiej Ćwiczenie nr 2: eoria obwodów i sygnałów laboratorium ĆWICZENIE 2 BDNIE WIDM SYGNŁÓW OKRESOWYCH. Cel ćwiczenia Celem ćwiczenia
EORI OBWODÓW I SYGNŁÓW LBORORIUM KDEMI MORSK Katedra eleomuniacji Morsiej Ćwiczenie nr 2: eoria obwodów i sygnałów laboratorium ĆWICZENIE 2 BDNIE WIDM SYGNŁÓW OKRESOWYCH. Cel ćwiczenia Celem ćwiczenia
PRZETWORNIKI CIŚNIENIA PRZYLEGAJĄCY Z PRZODU
 PRZETWORNIKI CIŚNIENIA PRZYLEGAJĄCY Z PRZODU Szwajcarska firma Trafag jst wiodącym międzynarodowym dostawcą wysokij jakości czujników oraz mirników do pomiaru oraz tmpratury. Przylgający z przodu prztwornik
PRZETWORNIKI CIŚNIENIA PRZYLEGAJĄCY Z PRZODU Szwajcarska firma Trafag jst wiodącym międzynarodowym dostawcą wysokij jakości czujników oraz mirników do pomiaru oraz tmpratury. Przylgający z przodu prztwornik
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ eoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ eoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Optymalizacja harmonogramów budowlanych - problem szeregowania zadań
 Mieczysław POŁOŃSKI Wydział Budownictwa i Inżynierii Środowisa, Szoła Główna Gospodarstwa Wiejsiego, Warszawa, ul. Nowoursynowsa 159 e-mail: mieczyslaw_polonsi@sggw.pl Założenia Optymalizacja harmonogramów
Mieczysław POŁOŃSKI Wydział Budownictwa i Inżynierii Środowisa, Szoła Główna Gospodarstwa Wiejsiego, Warszawa, ul. Nowoursynowsa 159 e-mail: mieczyslaw_polonsi@sggw.pl Założenia Optymalizacja harmonogramów
REGULAMIN PSKO 2016. I. Kryteria i wymagania dla zawodników Optimist PSKO. II. Mistrzostwa PSKO. III. Puchar Polski PSKO
 I. Krytria i wymagania dla zawodników Optimist PSKO 1. W rgatach PSKO mogą startować zawodnicy do lat 15 posiadający licncję sportową PZŻ, aktualn ubzpiczni OC i będący członkami PSKO, spłniający wymagania
I. Krytria i wymagania dla zawodników Optimist PSKO 1. W rgatach PSKO mogą startować zawodnicy do lat 15 posiadający licncję sportową PZŻ, aktualn ubzpiczni OC i będący członkami PSKO, spłniający wymagania
Zagadnienie statyki kratownicy płaskiej
 Zagadnini statyki kratownicy płaskij METODY OBLICZENIOWE Budownictwo, studia I stopnia, smstr 6 Instytut L-5, Wydział Inżynirii Lądowj, Politchnika Krakowska Ewa Pabisk () Równania MES dla ustrojów prętowych
Zagadnini statyki kratownicy płaskij METODY OBLICZENIOWE Budownictwo, studia I stopnia, smstr 6 Instytut L-5, Wydział Inżynirii Lądowj, Politchnika Krakowska Ewa Pabisk () Równania MES dla ustrojów prętowych
Symulator układu regulacji automatycznej z samonastrajającym regulatorem PID
 Symulator układu regulacj automatycznej z samonastrajającym regulatorem PID Założena. Należy napsać program komputerowy symulujący układ regulacj automatycznej, który: - ma pracować w trybe sterowana ręcznego
Symulator układu regulacj automatycznej z samonastrajającym regulatorem PID Założena. Należy napsać program komputerowy symulujący układ regulacj automatycznej, który: - ma pracować w trybe sterowana ręcznego
Centrale wentylacyjne z odzyskiem ciepła
 0 00 0 0 Digit Cntral wntylacyjn z odzyskim cipła Strowani www.cntral vallox Między innymi: Panl strujący lktroniczny z wyświtlaczm LCD Podgląd na mirzon tmpratury powitrza (zwnętrzngo, wwnętrzngo, nawiwango,
0 00 0 0 Digit Cntral wntylacyjn z odzyskim cipła Strowani www.cntral vallox Między innymi: Panl strujący lktroniczny z wyświtlaczm LCD Podgląd na mirzon tmpratury powitrza (zwnętrzngo, wwnętrzngo, nawiwango,
SZCZEGÓLOWY OPIS PRZEDMIOTU ZAMÓWIENIA dotyczy ZADANIA NR 8- Dostawa sprzętu oraz pomocy naukowych wyposażenie pracowni technik elektryk
 SZCZEGÓLOWY OPIS PRZEDMIOTU ZAMÓWIENIA dotyczy ZADANIA NR 8- Dostawa sprzętu oraz pomocy naukowych wyposażni pracowni tchnik lktryk Złącznik nr 5H do SIWZ Lp. Nazwa Ilość CPV 1. Silnik indukcyjny 1-fazowy
SZCZEGÓLOWY OPIS PRZEDMIOTU ZAMÓWIENIA dotyczy ZADANIA NR 8- Dostawa sprzętu oraz pomocy naukowych wyposażni pracowni tchnik lktryk Złącznik nr 5H do SIWZ Lp. Nazwa Ilość CPV 1. Silnik indukcyjny 1-fazowy
Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania
 1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
Model Predictive Control podstawy
 Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2015/2016 1 Plan wykładu Część I:
Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2015/2016 1 Plan wykładu Część I:
(Wszystkie wyniki zapisywać na dysku Dane E:)
") Cel ćwiczenia: Zapoznanie się z budową i zasadą działania PID oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA Temperatura mikrotermostatu
Cel ćwiczenia: Zapoznanie się z budową i zasadą działania PID oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA Temperatura mikrotermostatu
- Jeśli dany papier charakteryzuje się wskaźnikiem beta równym 1, to premia za ryzyko tego papieru wartościowego równa się wartości premii rynkowej.
 Śrdni waŝony koszt kapitału (WACC) Spółki mogą korzystać z wilu dostępnych na rynku źródł finansowania: akcj zwykł, kapitał uprzywiljowany, krdyty bankow, obligacj, obligacj zaminn itd. W warunkach polskich
Śrdni waŝony koszt kapitału (WACC) Spółki mogą korzystać z wilu dostępnych na rynku źródł finansowania: akcj zwykł, kapitał uprzywiljowany, krdyty bankow, obligacj, obligacj zaminn itd. W warunkach polskich
MODEL MATEMATYCZNY I SYMULACYJNO-KOMPUTEROWY UKŁADU NAPĘDOWEGO REAKTORA POLIMERYZACJI Z MODELOWĄ WERSJĄ SILNIKA BLDC W WYKONANIU RUROWYM
 Zszyty Problmow Maszyny Elktryczn Nr 2/2013 (99) 265 Marcjan Nowak Politchnika Częstochowska, Częstochowa MODEL MATEMATYCZNY I SYMULACYJNO-KOMPUTEROWY UKŁADU NAPĘDOWEGO REAKTORA POLIMERYZACJI Z MODELOWĄ
Zszyty Problmow Maszyny Elktryczn Nr 2/2013 (99) 265 Marcjan Nowak Politchnika Częstochowska, Częstochowa MODEL MATEMATYCZNY I SYMULACYJNO-KOMPUTEROWY UKŁADU NAPĘDOWEGO REAKTORA POLIMERYZACJI Z MODELOWĄ
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Wydział Informatyki WIT Studia inżynierskie (1. stopnia) stacjonarne (dzienne) Plan studiów w roku akademickim 2006/07 wg standardu ECTS 1 / 5
 stacjonarne (dzienne) Plan studiów w roku akademickim 2006/07 wg standardu ECTS 1 / 5") Wydział Informatyki WIT Studia inżynierskie (1. stopnia) stacjonarne (dzienne) Plan studiów w roku akademickim 2006/07 wg standardu ECTS (załącznik do uchwały Rady Wydziału z dn. 9.12.2006) Lp. Przedmiot
Wydział Informatyki WIT Studia inżynierskie (1. stopnia) stacjonarne (dzienne) Plan studiów w roku akademickim 2006/07 wg standardu ECTS (załącznik do uchwały Rady Wydziału z dn. 9.12.2006) Lp. Przedmiot
Nr 2. Laboratorium Maszyny CNC. Politechnika Poznańska Instytut Technologii Mechanicznej
 Politechnia Poznańsa Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 2 Badania symulacyjne napędów obrabiare sterowanych numerycznie Opracował: Dr inż. Wojciech Ptaszyńsi Poznań, 3 stycznia
Politechnia Poznańsa Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 2 Badania symulacyjne napędów obrabiare sterowanych numerycznie Opracował: Dr inż. Wojciech Ptaszyńsi Poznań, 3 stycznia
sterownik VCR v 1. 0
 sterownik VCR v 1.0 1 I. DANE TECHNICZNE...2 1 Budowa...2 2 Dane znamionowe...2 II. INSTRUKCJA UŻYTKOWANIA...3 1 Programowanie sterownika...3 2 Symulacja algorytmu...3 3 Możliwości kalendarza...4 3.1 Wgrywanie
sterownik VCR v 1.0 1 I. DANE TECHNICZNE...2 1 Budowa...2 2 Dane znamionowe...2 II. INSTRUKCJA UŻYTKOWANIA...3 1 Programowanie sterownika...3 2 Symulacja algorytmu...3 3 Możliwości kalendarza...4 3.1 Wgrywanie
PHILIPS Świetlówki liniowe
 Cnnik: EAN PHILIPS Świtlówki liniow Wszystki cny są cnami ntto, nalży doliczyć % VAT. Dział handlowy () --,, Fax: () -- PHILIPS Katalog - PHILIPS Katalog Źródł Światła i osprzętu Karty katalogow: PHILIPS
Cnnik: EAN PHILIPS Świtlówki liniow Wszystki cny są cnami ntto, nalży doliczyć % VAT. Dział handlowy () --,, Fax: () -- PHILIPS Katalog - PHILIPS Katalog Źródł Światła i osprzętu Karty katalogow: PHILIPS
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Modelowanie wybranych. urządzeń mechatronicznych
 Modelowanie wybranych elementów torów pomiarowych urządzeń mechatronicznych Pomiary - element sterowania napędem mechatronicznym Układ napędowy - Zintegrowane czujniki Zewnetrzne sygnały sterujące Sprzężenia
Modelowanie wybranych elementów torów pomiarowych urządzeń mechatronicznych Pomiary - element sterowania napędem mechatronicznym Układ napędowy - Zintegrowane czujniki Zewnetrzne sygnały sterujące Sprzężenia
Metody numeryczne. Instytut Sterowania i Systemów Informatycznych Wydział Elektrotechniki, Informatyki i Telekomunikacji Uniwersytet Zielonogórski
 Metody numeryczne Instytut Sterowania i Systemów Informatycznych Wydział Eletrotechnii, Informatyi i Teleomuniacji Uniwersytet Zielonogórsi Eletrotechnia stacjonarne-dzienne pierwszego stopnia z tyt. inżyniera
Metody numeryczne Instytut Sterowania i Systemów Informatycznych Wydział Eletrotechnii, Informatyi i Teleomuniacji Uniwersytet Zielonogórsi Eletrotechnia stacjonarne-dzienne pierwszego stopnia z tyt. inżyniera
Energia na potrzeby oświetlenia Ocena instalacji oświetleniowej budynku i jego otoczenia. Podstawowe pojęcia i definicje techniki świetlnej
 Szkolni dla osób ubigających się o uprawnini do sporządzania świadctwa charaktrystyki nrgtycznj budynku Enrgia na potrzby oświtlnia Ocna instalacji oświtlniowj budynku i jgo otocznia mgr inŝ. Andrzj Jurkiwicz
Szkolni dla osób ubigających się o uprawnini do sporządzania świadctwa charaktrystyki nrgtycznj budynku Enrgia na potrzby oświtlnia Ocna instalacji oświtlniowj budynku i jgo otocznia mgr inŝ. Andrzj Jurkiwicz
Perspektywy rozwoju rolnictwa ekologicznego w Polsce
 Anna urczak Zachodniopomorska Szkoła Biznsu w Szczcini Prspktywy rozwoju rolnictwa kologiczngo w Polsc Strszczni W artykul wyjaśniono istotę rolnictwa kologiczngo Następni szczgółowo omówiono zasady, na
Anna urczak Zachodniopomorska Szkoła Biznsu w Szczcini Prspktywy rozwoju rolnictwa kologiczngo w Polsc Strszczni W artykul wyjaśniono istotę rolnictwa kologiczngo Następni szczgółowo omówiono zasady, na
Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy Anti-windup.
 Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy Anti-windup.") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie