Regulator PID w sterownikach programowalnych GE Fanuc
|
|
|
- Zofia Gajda
- 8 lat temu
- Przeglądów:
Transkrypt
1 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski
2 Cel wykładu Przypomnienie zasad sterowania w pętli zamkniętej czyli regulacji Przypomnienie podstawowych informacji na temat regulacji PID Zapoznanie z regulacją PID z wykorzystaniem zaimplementowanego w sterownikach GE Fanuc blokiem regulacji PID
3 Klasyczny układ regulacji z(t) r(t) + - e(t) Regulator u(t) Obiekt y(t) y(t) wielkość wyjściowa (regulowana), u(t) sygnał sterujący r(t) wartość zadana, e(t) uchyb sterowania, z(t) - zakłócenie
4 PID-ISA 1 u( t) k e( t) e( ) d p Tc 0 t T d de( t) dt Parametry regulatora PID kp wzmocnienie, Tc- czas zdwojenia (po tym czasie od podania sygnału skokowego wyjście ulega zdwojeniu) Td czas wyprzedzenia Przy zmianie kp zmieniają wartość wszystkie parametry
5 PID-IND k u( t) k e( t) i e( ) d p T kp wzmocnienie, c t 0 k d T d de( t) dt Tc- czas zdwojenia, ki - wzmocnienie członu całkującego Td czas wyprzedzenia, kd wzmocnienie członu różniczkującego Wszystkie wyrazy są niezależne
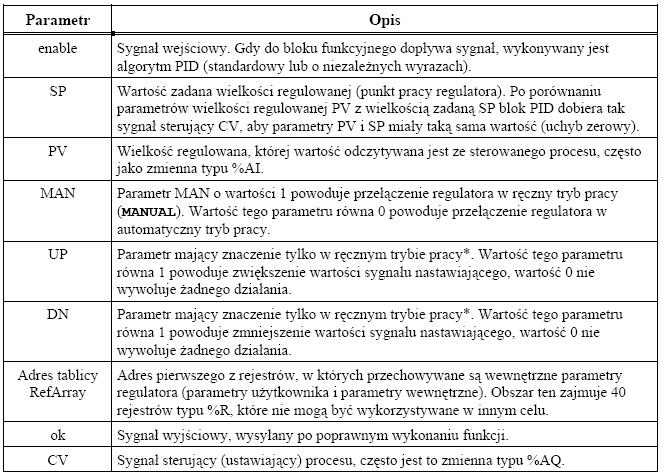
6 Blok PID Blok ten na podstawie dwóch wartości: punktu ustalonego (wartości zadanej) i bieżącej wartości wielkości regulowanej oraz korzystając z zadanych parametrów bloku, oblicza taką wartość sygnału sterującego (nastawiającego), która spowoduje zmniejszenie uchybu, czyli odchylenia wielkości regulowanej od wartości zadanej (punktu pracy).
7 Blok regulatora PID SP wartość zadana, PV wielkość regulowana, CV sygnał sterujący
8 PID
9 Blok funkcyjny PID wykorzystuje 40 rejestrów w pamięci sterownika do zapamiętywania zbioru parametrów regulatora. Wszystkie parametry są 16 bitowymi liczbami całkowitymi (w celu zapewnienia kompatybilności z 16 bitowymi analogowymi wielkościami regulowanymi.) Pozwala to na zastosowanie dla wielkości regulowanych pamięci adresowanej przez %AI oraz pamięci adresowanej przez %AQ dla sygnału sterującego.
10
11 Obliczenia dla PID w PLC Uchyb = (SP - PV) lub (PV-SP) dt = Bieżący czas sterownika - czas, który upłynął od momentu ostatniego wykonania algorytmu PID Blok różniczkujący = (Uchyb- Poprzedni uchyb)/dt lub (PV - poprzednia wartość PV)/dt
12 Rodzaje regulatorów PID
13 Rodzaje regulatorów PID Algorytm PID o niezależnych wyrazach (PID_INT) oblicza sygnał ustawiający jako: Sygnał ustawiający regulatora PID= Kp * Uchyb + Ki * Uchyb * dt + Kd * pochodna + CV Bias Standardowy algorytm ISA (PID_ISA) korzysta z innego wzoru: Sygnał ustawiający regulatora PID= Kc * (Uchyb + Uchyb * dt/ti + Td * pochodna) + CV
14
15
16
17 Współczynnik wzmocnienia proporcjonalnego kp (05) Wartość całkowita, oznaczana symbolem Kc (w wersji ISA), określająca zmianę sygnału ustawiającego CV odpowiadającą zmianie uchybu o 100 jednostek bezwymiarowych PV. Parametr ten wyświetlany jest jako 0.00 %/%, z domyślnie przyjmowanymi dwoma miejscami dziesiętnymi. Przykładowo parametr Kp równy 450 będzie wyświetlany jako 4.50, a powodowane przez niego zmiana sygnału nastawiającego będzie wynosić Kp*Uchyb/100 lub 450*Uchyb/100.
18 Czas różniczkowania Kd (06) Wartość całkowita określająca czas różniczkowania w setnych częściach sekundy. Wprowadzana w jednostkach 10 milisekund, a wyświetlana w formacie 0.00 sekund Przykładowo, jeżeli parametr Kd ma wartość 120, będzie on wyświetlany jako 1.20 sek., a powodowana przez niego zmiana sygnału wyjściowego bloku PID będzie wynosić Kd*przyrost uchybu/ przyrost czasu, czyli 120*4/3, jeżeli Uchyb zmienić się o 4 jednostki bezwymiarowe PV w ciągu 30 milisekund. Parametr Kd może zostać wykorzystany do przyśpieszenia wolnej odpowiedzi regulatora, ale jest bardzo wrażliwy na zakłócenia wielkości regulowanej PV.
19 Współczynnik wzmocnienia członu całkującego Ki(07) Wartość całkowita ze znakiem określająca częstotliwość całkowania, jeżeli Uchyb ma stałą wartość równą 1 jednostce bezwymiarowej PV. Parametr ten wyświetlany jest w formacie powtórzeń/ sek. Przykładowo, jeżeli parametr Ki ma wartość 1400, wyświetlany będzie jako powtórzeń/ sek., a powodowana przez niego zmiana sygnału wyjściowego bloku PID wynosi Ki*Uchyb*dt, czyli 1.400*20*50/1000, dla Uchybu o wartości 20 jednostek bezwymiarowych wartości regulowanej PV i czasu trwania cyklu sterownika 50 milisekund (Okres próbkowania równy 0).

20 Strojenie - heurystyki

21 Strojenie heurystyki cd.
22 Określenie parametrów obiektu
23 Strojenie Ziegler, Nichols

24 Strojenie Ziegler, Nichols

25 Okno PID Tuning
26 Ćwiczenie w ramach Lab. KSS Zamodelować obiekt inercyjny I-go rzędu z opóźnieniem Zaimplementować taki obiekt w sterowniku lub w aplikacji wizualizacyjnej Przeskalować sygnały na poziom regulatora PID w sterowniku Dokonać syntezy regulatora PID dla opracowanego obiektu Dobrać nastawy regulatora PID
27 Zaimplementować w sterowniku równanie różnicowe jako model obiektu y(k)=0.9y(k-1)+0.05u(k-10) Okres T=100ms Wymusić stały czas trwania cyklu sterownika Skorzystać z bloku SHFR dla uzyskania opóźnienia
28 Implementacja równania różnicowego W równaniach występują przeważnie trzy operacje: Dodawania Mnożenia Opóźnienia Realizacja dwóch pierwszych nie stanowi żadnego problemu
29 Implementacja równania różnicowego Implementacja opóźnienia Wartość w chwili poprzedniej np. y(k-1) Wartość z chwil wcześniejszych wykorzystanie rejestrów przesuwnych
30 Przekonwertować sygnały obiektu na liczby całkowite w zakresie Posłużyć się blokami konwersji real->int Dokonać syntezy regulatora PID Zadawać SP z wizualizacji i obserwować zachowanie regulowanego obiektu Dostroić regulator
31 Model Obiektu Wyświetlanie PV, CV PID Sterownik Zadawanie SP Wizualizacja

32 Sterowanie PID
33 PID w pętli sprzętowej
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
STEROWANIE MASZYN I URZĄDZEŃ I. Laboratorium. 8. Układy ciągłe. Regulator PID
 STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Regulacja prędkości posuwu belki na prowadnicach pionowych przy wykorzystaniu sterownika Versa Max
 Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Ćwiczenie 3 - Sterownik PLC realizacja algorytmu PID
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie KATEDRA AUTOMATYKI LABORATORIUM Aparatura Automatyzacji Ćwiczenie 3. Sterownik PLC realizacja algorytmu PID Wydział EAIiE kierunek AiR rok
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie KATEDRA AUTOMATYKI LABORATORIUM Aparatura Automatyzacji Ćwiczenie 3. Sterownik PLC realizacja algorytmu PID Wydział EAIiE kierunek AiR rok
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa.
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
UWAGA 2. Wszystkie wyniki zapisywać na dysku Dane E: (dotyczy symulacji i pomiarów rzeczywistych)
") Cel ćwiczenia: Zapoznanie się z budową i zasadą działania regulatorów ciągłych oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z budową i zasadą działania regulatorów ciągłych oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SIMATIC S Regulator PID w sterowaniu procesami. dr inż. Damian Cetnarowicz. Plan wykładu. I n t e l i g e n t n e s y s t e m y z e
 Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Automatyka i sterowanie w gazownictwie. Regulatory w układach regulacji
 Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Dla naszego obiektu ciągłego: przy czasie próbkowania T p =2.
 1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Praktyka inżynierska korzystamy z tego co mamy. regulator. zespół wykonawczy. obiekt (model) Konfiguracja regulatora
 Konfiguracja regulatora") raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
Rozdział 22 Regulacja PID ogólnego przeznaczenia
 Rozdział 22 Regulacja ogólnego przeznaczenia 22.1 Wstęp do regulacji Metodologia otwartej pętli może być odpowiednia dla większości zastosowań dotyczących sterowania procesami. Dzieje się tak z uwagi na
Rozdział 22 Regulacja ogólnego przeznaczenia 22.1 Wstęp do regulacji Metodologia otwartej pętli może być odpowiednia dla większości zastosowań dotyczących sterowania procesami. Dzieje się tak z uwagi na
(Wszystkie wyniki zapisywać na dysku Dane E:)
") Cel ćwiczenia: Zapoznanie się z budową i zasadą działania PID oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA Temperatura mikrotermostatu
Cel ćwiczenia: Zapoznanie się z budową i zasadą działania PID oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA Temperatura mikrotermostatu
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.7 17.06.2008 Spis treści SPIS TREŚCI...2 DANE
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.7 17.06.2008 Spis treści SPIS TREŚCI...2 DANE
Realizacje regulatorów PID w sterownikach PLC Siemens S7-1200
 D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
(Wszystkie wyniki zapisywać na dysku Dane E:)
") Cel ćwiczenia: Zapoznanie się z budową i zasadą działania PID oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA Temperatura mikrotermostatu
Cel ćwiczenia: Zapoznanie się z budową i zasadą działania PID oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA Temperatura mikrotermostatu
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Podstawy automatyki i robotyki AREW001 Wykład 2 Układy regulacji i regulatory
 Podstawy automatyki i robotyki AREW001 Wykład 2 Układy regulacji i regulatory Dr inż. Zbigniew Zajda Katedra Automatyki, Mechatroniki i Systemów Sterowania Wydział Elektroniki Politechniki Wrocławskiej
Podstawy automatyki i robotyki AREW001 Wykład 2 Układy regulacji i regulatory Dr inż. Zbigniew Zajda Katedra Automatyki, Mechatroniki i Systemów Sterowania Wydział Elektroniki Politechniki Wrocławskiej
Sterowanie pracą reaktora chemicznego
 Sterowanie pracą reaktora chemicznego Celem ćwiczenia jest opracowanie na sterowniku programowalnym programu realizującego jednopętlowy układ regulacji a następnie dobór nastaw regulatora zapewniających
Sterowanie pracą reaktora chemicznego Celem ćwiczenia jest opracowanie na sterowniku programowalnym programu realizującego jednopętlowy układ regulacji a następnie dobór nastaw regulatora zapewniających
UWAGA. Wszystkie wyniki zapisywać na dysku Dane E: Program i przebieg ćwiczenia:
 Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
11. Dobór rodzaju, algorytmu i nastaw regulatora
 205 11. Dobór rodzaju, algorytmu i nastaw regulatora 11.1 Wybór rodzaju i algorytmu regulatora Poprawny wybór rodzaju regulatora i jego algorytmu uzależniony jest od znajomości (choćby przybliżonej) właściwości
205 11. Dobór rodzaju, algorytmu i nastaw regulatora 11.1 Wybór rodzaju i algorytmu regulatora Poprawny wybór rodzaju regulatora i jego algorytmu uzależniony jest od znajomości (choćby przybliżonej) właściwości
Automatyka w inżynierii środowiska. Wykład 1
 Automatyka w inżynierii środowiska Wykład 1 Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 21.01.2012 Obecność na wykładach: zalecana. Zakres tematyczny przedmiotu: (10 godzin wykładów) Standardowe
Automatyka w inżynierii środowiska Wykład 1 Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 21.01.2012 Obecność na wykładach: zalecana. Zakres tematyczny przedmiotu: (10 godzin wykładów) Standardowe
Siemens S7-1200 Konfiguracja regulatora PID
 Siemens S7-1200 Konfiguracja regulatora PID 1 Wprowadzenie Środowisko STEP 7 umożliwia wykorzystanie instrukcji sterownika S7-1200 które pozwalają na prostą konfiguracje i zastosowanie regulatora PID.
Siemens S7-1200 Konfiguracja regulatora PID 1 Wprowadzenie Środowisko STEP 7 umożliwia wykorzystanie instrukcji sterownika S7-1200 które pozwalają na prostą konfiguracje i zastosowanie regulatora PID.
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
Dobór typu regulatora i jego nastaw w procesie syntezy układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Robotyki
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Dobór typu regulatora i jego nastaw w procesie syntezy układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Robotyki mgr
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Dobór typu regulatora i jego nastaw w procesie syntezy układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Robotyki mgr
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
ZASTOSOWANIE PRZEKAŹNIKÓW PLC DO REALIZACJI ALGORYTMÓW STEROWANIA OGRZEWANIEM
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 92 Electrical Engineering 2017 Karol NOWAK* Grzegorz DOMBEK* Andrzej KSIĄŻKIEWICZ* Bartosz BOCHENEK* Piotr NOWACZYK* Paweł PLUTA* DOI 10.21008/j.1897-0737.2017.92.0037
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 92 Electrical Engineering 2017 Karol NOWAK* Grzegorz DOMBEK* Andrzej KSIĄŻKIEWICZ* Bartosz BOCHENEK* Piotr NOWACZYK* Paweł PLUTA* DOI 10.21008/j.1897-0737.2017.92.0037
Regulator P (proporcjonalny)
") Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
Wydział Fizyki i Informatyki Stosowanej
 Wydział Fizyki i Informatyki Stosowanej Podstawy inżynierii sterowania Ćwiczenia laboratoryjne Laboratorium 3: Regulacja ciągła dr inż. Dominika Gołuńska dr inż. Szymon Łukasik 1. Regulatory ciągłe liniowe.
Wydział Fizyki i Informatyki Stosowanej Podstawy inżynierii sterowania Ćwiczenia laboratoryjne Laboratorium 3: Regulacja ciągła dr inż. Dominika Gołuńska dr inż. Szymon Łukasik 1. Regulatory ciągłe liniowe.
PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa
 Rok akademicki 2015/2016 Semestr letni PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa Wstęp teoretyczny: W układzie regulacji określa
Rok akademicki 2015/2016 Semestr letni PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa Wstęp teoretyczny: W układzie regulacji określa
Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy Anti-windup.
 Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy Anti-windup.") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy
PAiTM. materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż.
 PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Politechnika Białostocka
 Politechnika Białostocka W ydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układ regulacji PID: konfiguracja, strojenie i testowanie regulatora
Politechnika Białostocka W ydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układ regulacji PID: konfiguracja, strojenie i testowanie regulatora
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne sem. V, AiR Laboratorium nr 5 - Regulator PID w sterowniku programowalnym Siemens S7-1200 z wykorzystaniem symulacji w pętli sprzętowej Hardware
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne sem. V, AiR Laboratorium nr 5 - Regulator PID w sterowniku programowalnym Siemens S7-1200 z wykorzystaniem symulacji w pętli sprzętowej Hardware
LAB-EL LB-760A: regulacja PID i procedura samostrojenia
 Page 1 of 5 Copyright 2003-2010 LAB-EL Elektronika Laboratoryjna www.label.pl LAB-EL LB-760A: regulacja PID i procedura samostrojenia Nastawy regulatora PID W regulatorze LB-760A poczynając od wersji 7.1
Page 1 of 5 Copyright 2003-2010 LAB-EL Elektronika Laboratoryjna www.label.pl LAB-EL LB-760A: regulacja PID i procedura samostrojenia Nastawy regulatora PID W regulatorze LB-760A poczynając od wersji 7.1
Dynamika procesu zmienna stała. programowalne zmiany parametrów r.
 Sterowanie adaptacyjne Sterowanie adaptacyjne polega na dostosowywaniu (adaptacji) nastaw regulatora do zmian parametrów obiektu (w trakcie pracy) Techniki adaptacji Dynamika procesu zmienna stała regulator
Sterowanie adaptacyjne Sterowanie adaptacyjne polega na dostosowywaniu (adaptacji) nastaw regulatora do zmian parametrów obiektu (w trakcie pracy) Techniki adaptacji Dynamika procesu zmienna stała regulator
Spis treści. Dzień 1. I Elementy układu automatycznej regulacji (wersja 1109) II Rodzaje regulatorów i struktur regulacji (wersja 1109)
 II Rodzaje regulatorów i struktur regulacji (wersja 1109)") Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Automatyka i robotyka
 Automatyka i robotyka Wykład 8 - Regulator PID Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu regulator PID 2 z 29 Kompensator wyprzedzająco-opóźniający
Automatyka i robotyka Wykład 8 - Regulator PID Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu regulator PID 2 z 29 Kompensator wyprzedzająco-opóźniający
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
INDU-20. Przemysłowy Sterownik Mikroprocesorowy. Przeznaczenie Masownice próżniowe, mieszałki, systemy kontroli próżni
 Przemysłowy Sterownik Mikroprocesorowy INDU-20 Przeznaczenie Masownice próżniowe, mieszałki, systemy kontroli próżni Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 32 763 77 77, Fax: 32 763 75 94 www.mikster.pl
Przemysłowy Sterownik Mikroprocesorowy INDU-20 Przeznaczenie Masownice próżniowe, mieszałki, systemy kontroli próżni Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 32 763 77 77, Fax: 32 763 75 94 www.mikster.pl
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
REGULATOR PI W SIŁOWNIKU 2XI
 REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
Ćwiczenie PA5. Badanie serwomechanizmu połoŝenia z regulatorem PID
 - laboratorium Ćwiczenie PA5 Badanie serwomechanizmu połoŝenia z regulatorem PID Instrukcja laboratoryjna Opracował : mgr inŝ. Arkadiusz Winnicki Człowiek - najlepsza inwestycja Projekt współfinansowany
- laboratorium Ćwiczenie PA5 Badanie serwomechanizmu połoŝenia z regulatorem PID Instrukcja laboratoryjna Opracował : mgr inŝ. Arkadiusz Winnicki Człowiek - najlepsza inwestycja Projekt współfinansowany
SYNTEZA UKŁADU AUTOMATYCZNEJ REGULACJI TEMPERATURY
 Ćwiczenie SYNTEZA UKŁADU AUTOMATYCZNEJ REGULACJI TEMPERATURY 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie studentów z pracą układu automatycznej regulacji temperatury 2. WPROWADZENIE Układy automatycznej
Ćwiczenie SYNTEZA UKŁADU AUTOMATYCZNEJ REGULACJI TEMPERATURY 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie studentów z pracą układu automatycznej regulacji temperatury 2. WPROWADZENIE Układy automatycznej
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu
 Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu 1. WSTĘP Serwomechanizmy są to przeważnie układy regulacji położenia. Są trzy główne typy zadań serwomechanizmów: - ruch point-to-point,
Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu 1. WSTĘP Serwomechanizmy są to przeważnie układy regulacji położenia. Są trzy główne typy zadań serwomechanizmów: - ruch point-to-point,
Automatyzacja. Ćwiczenie 9. Transformata Laplace a sygnałów w układach automatycznej regulacji
 Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 1. Dobór rodzaju i nastaw regulatorów PID Rodzaje regulatorów 2 Regulatory dwustawne (2P)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 1. Dobór rodzaju i nastaw regulatorów PID Rodzaje regulatorów 2 Regulatory dwustawne (2P)
Identyfikacja obiektu i optymalizacja nastaw w Standard PID Control
 Identyfikacja obiektu i optymalizacja nastaw w Standard PID Control Rozwiązując zadanie sterowania układu, automatyk powinien przede wszystkim sporządzić odpowiedni jego opis. Chcąc np. automatycznie sterować
Identyfikacja obiektu i optymalizacja nastaw w Standard PID Control Rozwiązując zadanie sterowania układu, automatyk powinien przede wszystkim sporządzić odpowiedni jego opis. Chcąc np. automatycznie sterować
Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych
 Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
1. Rejestracja odpowiedzi skokowej obiektu rzeczywistego i wyznaczenie podstawowych parametrów dynamicznych obiektu
 Cel ćwiczenia: Zapoznanie się z metodami badania i analitycznego wyznaczania parametrów dynamicznych rzeczywistego obiektu regulacji (identyfikacji obiektu regulacji) na przykładzie mikrotermostatu oraz
Cel ćwiczenia: Zapoznanie się z metodami badania i analitycznego wyznaczania parametrów dynamicznych rzeczywistego obiektu regulacji (identyfikacji obiektu regulacji) na przykładzie mikrotermostatu oraz
Ćw. S-III.4 ELEMENTY ANALIZY I SYNTEZY UAR (Dobór nastaw regulatora)
") Dr inż. Michał Chłędowski PODSTAWY AUTOMATYKI I ROBOTYKI LABORATORIUM Ćw. S-III.4 ELEMENTY ANALIZY I SYNTEZY UAR (Dobór nastaw regulatora) Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z pojęciem "syntezy
Dr inż. Michał Chłędowski PODSTAWY AUTOMATYKI I ROBOTYKI LABORATORIUM Ćw. S-III.4 ELEMENTY ANALIZY I SYNTEZY UAR (Dobór nastaw regulatora) Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z pojęciem "syntezy
Ćwiczenie PA6. Badanie działania regulatora PID zaimplementowanego w sterowniku S firmy Siemens
 INSTYTUT AUTOMATYKI i ROBOTYKI WYDZIAŁ MECHATRONIKI - laboratorium Ćwiczenie PA6 Badanie działania regulatora PID zaimplementowanego w sterowniku S7-1200 firmy Siemens Instrukcja laboratoryjna Opracowanie
INSTYTUT AUTOMATYKI i ROBOTYKI WYDZIAŁ MECHATRONIKI - laboratorium Ćwiczenie PA6 Badanie działania regulatora PID zaimplementowanego w sterowniku S7-1200 firmy Siemens Instrukcja laboratoryjna Opracowanie
Model Predictive Control
 Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 1 Plan wykładu Część I:
Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 1 Plan wykładu Część I:
Rys 1 Schemat modelu masa- sprężyna- tłumik
 Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Selection of controller parameters Strojenie regulatorów
 Division of Metrology and Power Processes Automation Selection of controller parameters Strojenie regulatorów A-9 Automatics laboratory Laboratorium automatyki Developed by//opracował: mgr inż. Wojciech
Division of Metrology and Power Processes Automation Selection of controller parameters Strojenie regulatorów A-9 Automatics laboratory Laboratorium automatyki Developed by//opracował: mgr inż. Wojciech
UWAGA. Program i przebieg ćwiczenia:
 Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Dobór parametrów układu regulacji, Identyfikacja parametrów obiektów dynamicznych Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Dobór parametrów układu regulacji, Identyfikacja parametrów obiektów dynamicznych Kierunek studiów: Transport, Stacjonarne
1. Opis teoretyczny regulatora i obiektu z opóźnieniem.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
Sterowanie w programie ADAMS regulator PID. Przemysław Sperzyński
 Sterowanie w programie ADAMS regulator PID Przemysław Sperzyński Schemat regulatora K p e t e t = u zad t u akt (t) M = K p e t + K i e t + K d de(t) u zad uakt M K i e t K d de t Uchyb regulacji człony
Sterowanie w programie ADAMS regulator PID Przemysław Sperzyński Schemat regulatora K p e t e t = u zad t u akt (t) M = K p e t + K i e t + K d de(t) u zad uakt M K i e t K d de t Uchyb regulacji człony
Sterownik momentu obrotowego silnika prądu stałego
 Politechnika Wrocławska Projekt Sterownik momentu obrotowego silnika prądu stałego Autorzy: Paweł Bogner Marcin Dmochowski Prowadzący: mgr inż. Jan Kędzierski 30.04.2012 r. 1 Opis ogólny Celem projektu
Politechnika Wrocławska Projekt Sterownik momentu obrotowego silnika prądu stałego Autorzy: Paweł Bogner Marcin Dmochowski Prowadzący: mgr inż. Jan Kędzierski 30.04.2012 r. 1 Opis ogólny Celem projektu
Sterowniki programowalne. System GE Fanuc serii 90-30 Zasady działania systemu (część I)
") Wykład w ramach przedmiotu Sterowniki programowalne System GE Fanuc serii 90-30 Zasady działania systemu (część I) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski Plan wykładu
Wykład w ramach przedmiotu Sterowniki programowalne System GE Fanuc serii 90-30 Zasady działania systemu (część I) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski Plan wykładu
Model Predictive Control podstawy
 Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2015/2016 1 Plan wykładu Część I:
Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2015/2016 1 Plan wykładu Część I:
Zaliczenie - zagadnienia (aktualizacja )
") Tomasz Żabiński Ocena 3.0 Zaliczenie - zagadnienia (aktualizacja 23.01.2017) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne. 3. Scharakteryzuj
Tomasz Żabiński Ocena 3.0 Zaliczenie - zagadnienia (aktualizacja 23.01.2017) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne. 3. Scharakteryzuj
T zew. K cw. Rys. II.2.Pomieszczenie (3), PI T gz Wzory poniżej - dla Rys. II.1 na podstawie (I-1). Dla Rys. II.2 analogicznie na podstawie (I-2).
, PI T gz Wzory poniżej - dla Rys. II.1 na podstawie (I-1). Dla Rys. II.2 analogicznie na podstawie (I-2).") II. Jednoobwodowy układ regulacji (SISO Design) II.1. Pomieszczenie z grzejnikiem c.o. regulacja II.1.1 Regulacja jakościowa (gz) Założenia: PV, CV, regulator Rys. II.1.Pomieszczenie (), Rys. II..Pomieszczenie
II. Jednoobwodowy układ regulacji (SISO Design) II.1. Pomieszczenie z grzejnikiem c.o. regulacja II.1.1 Regulacja jakościowa (gz) Założenia: PV, CV, regulator Rys. II.1.Pomieszczenie (), Rys. II..Pomieszczenie
Laboratorium Komputerowe Systemy Pomiarowe
 Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Programowanie wielofunkcyjnej karty pomiarowej w VEE Data wykonania: 15.05.08 Data oddania: 29.05.08 Celem ćwiczenia była
Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Programowanie wielofunkcyjnej karty pomiarowej w VEE Data wykonania: 15.05.08 Data oddania: 29.05.08 Celem ćwiczenia była
PRZEMYSŁOWE UKŁADY STEROWANIA PID. Wykład 5 i 6. Michał Grochowski, dr inż. Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki PRZEMYSŁOWE UKŁADY STEROWANIA PID Wykład 5 i 6 Michał Grochowski, dr inż. Studia I stopnia inżynierskie, Semestr IV Charakterystyki częstotliwościowe
Politechnika Gdańska Wydział Elektrotechniki i Automatyki PRZEMYSŁOWE UKŁADY STEROWANIA PID Wykład 5 i 6 Michał Grochowski, dr inż. Studia I stopnia inżynierskie, Semestr IV Charakterystyki częstotliwościowe
Komory suszarnicze, Komory klimatyczne, Systemy kontroli temperatury i wilgotności
 Przemysłowy Sterownik Mikroprocesorowy INDU-30 Przeznaczenie Komory suszarnicze, Komory klimatyczne, Systemy kontroli temperatury i wilgotności Sp. z o.o. 41-250 zeladź ul. Wojkowicka 21 Tel. 32 763 77
Przemysłowy Sterownik Mikroprocesorowy INDU-30 Przeznaczenie Komory suszarnicze, Komory klimatyczne, Systemy kontroli temperatury i wilgotności Sp. z o.o. 41-250 zeladź ul. Wojkowicka 21 Tel. 32 763 77
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym
 Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym 1. Cel ćwiczenia Celem ćwiczenia jest analiza właściwości układu sterowania w torze otwartym, zamkniętym oraz zamkniętym z kompensacją zakłóceń.
Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym 1. Cel ćwiczenia Celem ćwiczenia jest analiza właściwości układu sterowania w torze otwartym, zamkniętym oraz zamkniętym z kompensacją zakłóceń.
Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena LABORATORIUM 4. PODSTAW 5. AUTOMATYKI
 Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena LABORATORIUM 4. PODSTAW 5. AUTOMATYKI") Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA7b 1 Badanie jednoobwodowego układu regulacji
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA7b 1 Badanie jednoobwodowego układu regulacji
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji
 Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji Opracowanie: mgr inż. Krystian Łygas, inż. Wojciech Danilczuk Na podstawie materiałów Prof. dr hab.
Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji Opracowanie: mgr inż. Krystian Łygas, inż. Wojciech Danilczuk Na podstawie materiałów Prof. dr hab.
Algorytmy sztucznej inteligencji
 Algorytmy sztucznej inteligencji Dynamiczne sieci neuronowe 1 Zapis macierzowy sieci neuronowych Poniżej omówione zostaną części składowe sieci neuronowych i metoda ich zapisu za pomocą macierzy. Obliczenia
Algorytmy sztucznej inteligencji Dynamiczne sieci neuronowe 1 Zapis macierzowy sieci neuronowych Poniżej omówione zostaną części składowe sieci neuronowych i metoda ich zapisu za pomocą macierzy. Obliczenia
Wykład 1. Standardowe algorytmy regulacji i sterowania
 Automatyka w Inżynierii Środowiska Wykład 1 Standardowe algorytmy regulacji i sterowania Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 15.01.2011 Obecność na wykładach: zalecana. Zakres tematyczny
Automatyka w Inżynierii Środowiska Wykład 1 Standardowe algorytmy regulacji i sterowania Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 15.01.2011 Obecność na wykładach: zalecana. Zakres tematyczny
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ. T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
 T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia") REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ Y o (s) - E(s) B(s) /T I s K p U(s) Z(s) G o (s) Y(s) T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ Y o (s) - E(s) B(s) /T I s K p U(s) Z(s) G o (s) Y(s) T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7
 Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Sterowniki Programowalne (SP) Wykład #4
 Wykład #4") Sterowniki Programowalne (SP) Wykład #4 System GE Fanuc serii 90-30 Zasady działania systemu (część II) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski Październik
Sterowniki Programowalne (SP) Wykład #4 System GE Fanuc serii 90-30 Zasady działania systemu (część II) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski Październik
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
4. REGULACJA PID W STEROWNIKACH PLC
 4. REGULACJA PID W STEROWNIKACH PLC Algorytm PID należy do najczęściej stosowanych algorytmów w układach regulacji. Ze względu na to, że sterowniki realizują sterowanie w sposób cyfrowy, algorytm ten jest
4. REGULACJA PID W STEROWNIKACH PLC Algorytm PID należy do najczęściej stosowanych algorytmów w układach regulacji. Ze względu na to, że sterowniki realizują sterowanie w sposób cyfrowy, algorytm ten jest
Sterowniki programowalne
 Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii 90-30 Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski
Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii 90-30 Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ
 REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ 1 1. Zadania regulatorów w układach regulacji automatycznej Do podstawowych zadań regulatorów w układach regulacji automatycznej należą: porównywanie wartości
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ 1 1. Zadania regulatorów w układach regulacji automatycznej Do podstawowych zadań regulatorów w układach regulacji automatycznej należą: porównywanie wartości
SKRÓCONY OPIS REGULATORA AT-503 ( opracowanie własne TELMATIK - dotyczy modeli AT i AT )
") SKRÓCONY OPIS REGULATORA AT-503 ( opracowanie własne TELMATIK - dotyczy modeli AT-503 1141-000 i AT-503-1161-000 ) Regulator temperatury AT-503 wykorzystywany jest do zaawansowanej regulacji temperatury
SKRÓCONY OPIS REGULATORA AT-503 ( opracowanie własne TELMATIK - dotyczy modeli AT-503 1141-000 i AT-503-1161-000 ) Regulator temperatury AT-503 wykorzystywany jest do zaawansowanej regulacji temperatury