Model Predictive Control
|
|
|
- Roman Łuczak
- 6 lat temu
- Przeglądów:
Transkrypt
1 Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 1
2 Plan wykładu Część I: Przypomnienie Struktury sterowania SISO i MIMO Klasyczny regulator PID Regulator PID z filtrem anti-windup Część II: Sterowanie predykcyjne Czym jest sterowanie predykcyjne Dlaczego sterowanie predykcyjne Potencjalne wady Zasada działania 2
3 Część I : Przypomnienie 3
4 Obiekt SISO - przykładowa struktura sterowania 4
5 Obiekt SISO - przykładowa struktura sterowania 5
6 Obiekty MIMO - przykłady struktur sterowania 6
7 Regulator PID Postać ciągłą regulatora PID: u t 1 de = dτ + Td T i dt 0 ( t) K e( t) + e( τ ) ( t) gdzie: u(t) wielkość sterująca e(t) uchyb sterowania K współczynnik wzmocnienia, T i stała czasowa całkowania (czas zdwojenia) T d stała czasowa różniczkowania (czas wyprzedzenia) 7


8 Regulator PID - uwzględnienie możliwości urządzeń wykonawczych Kp = Ki = Kd = u 0.1 8


9 Regulator PID - uwzględnienie możliwości urządzeń wykonawczych Kp = Ki = Kd = u 0.1 9
10 Regulator PID - uwzględnienie możliwości urządzeń wykonawczych Jeden z wielu przykładów realizacji ciągłego regulatora PID z filtrem anti-windup (przeciwnasyceniowym): ujemne sprzężenie zwrotne obejmujące część całkującą (ang. tracking anti-windup, back-calculation) 10
11 Regulator PID - uwzględnienie możliwości urządzeń wykonawczych Jeden z wielu przykładów realizacji ciągłego regulatora PID z filtrem anti-windup (przeciwnasyceniowym): ujemne sprzężenie zwrotne obejmujące część całkującą (ang. tracking anti-windup, back-calculation) 11

12 Regulator PID - uwzględnienie możliwości urządzeń wykonawczych Kp = Ki = Kd = Tt = u_sat
13 Regulator PID - uwzględnienie możliwości urządzeń wykonawczych Porównanie działania układu z regulatorem bez (linia zielona) i z filtrem anti-windup, przeciwnasyceniowym (linia niebieska) y(t) u(t) czesccalk. reg. I(t) czas t 13
14 Część II: Sterowanie predykcyjne 14
15 Czym jest sterowanie predykcyjne? Predykcyjne algorytmy regulacji wyznaczają w każdej chwili próbkowania sterowanie przez optymalizację pewnej funkcji kryterialnej (funkcji celu) zdefiniowanej na skończonym horyzoncie, na którym w oparciu o model obiektu predykowane (przewidywane) jest jego zachowanie. Funkcja celu to odpowiednio zdefiniowane zadanie sterowania optymalnego. Na wejście obiektu podawana jest jedynie początkowa część wyznaczonego rozwiązania (sterowanie). Przy czym horyzont na którym rozwiązuje się zadanie optymalizacji jest typowo przesuwany z kroku na krok (kolejne chwile próbkowania). 15

16 Czym jest sterowanie predykcyjne? krok predykcji horyzont sterowania horyzont predykcji 16
17 Czym jest sterowanie predykcyjne? Krok predykcji powinien być odpowiednio mniejszy od najmniejszej stałej czasowej regulowanego procesu po to, aby regulator MPC uwzględniał najszybszą dynamikę występującą w analizowanym procesie, Horyzont predykcji powinien być odpowiednio większy od największej stałej czasowej regulowanego procesu po to, aby horyzont obejmował odpowiedź procesu od chwili bieżącej do czasu jej ustalenia (dla obiektów liniowych często przyjmuje się sześciokrotność największej stałej czasowej obiektu), Horyzont sterowania dobiera się tak by był mniejszy od horyzontu predykcji: całe sterowanie wyznaczone przez optymalizator w aktualnej chwili czasu k wykorzystane jest do predykcji zachowania procesu w przyszłości na horyzoncie predykcji, w aktualnej chwili czasu k przykładane jest jedynie sterowanie obowiązujące na kroku predykcji). 17
18 Rozwój sterowania predykcyjnego Dynamicznie rozwijające się w ostatnich latach różnego rodzaju algorytmy sterowania predykcyjnego szybko znalazły szerokie zastosowanie w przemyśle: chemicznym, rafineryjnym, gazowym, metalurgicznym, papierniczym, samochodowym, kosmicznym, farmaceutycznym, w cukrowniach, elektrowniach, kotłowniach, hutnictwie, przetwórstwie spożywczym, górnictwie, mikroelektronice, biotechnologii, w procesach destylacji, polimeryzacji oraz oczyszczania ścieków 18

19 Rozwój sterowania predykcyjnego 19
20 Podstawowe algorytmy regulacji predykcyjnej z przesuwnym horyzontem liniowe Algorytm DMC (ang. Dynamic Matrix Control) dla modeli obiektu opisanych odpowiedzią skokową lub impulsową Algorytm GPC (ang. Generized Predictive Control) dla modeli obiektu w postaci dyskretnych równań różnicowych Algorytm MPCS (ang. Model Predictive Control with State equations) dla modeli obiektu w postaci równań stanu 20
21 Podstawowe algorytmy regulacji predykcyjnej z przesuwnym horyzontem nieliniowe Algorytm MPC-NO z nieliniową optymalizacją dla nieliniowych modeli obiektu Algorytm MPC-NSL nieliniowe z sukcesywną linearyzacją, w każdej chwili próbkowania wykonuje się linearyzację modelu nieliniowego w aktualnym stanie obiektu a następnie wyznacza się sterowanie stosując liniowe MPC Algorytm MPC-NPL z nieliniową predykcją i linearyzacją, w odróżnieniu od MPC-NSL do predykcji wykorzystuje się model nieliniowy a jedynie zadania optymalizacji rozwiązywane są na modelu 21

22 Rozwój sterowania predykcyjnego 22
23 Dlaczego sterowanie predykcyjne? Sterowanie predykcyjne umożliwia: projektowanie algorytmu regulacji z uwzględnieniem ograniczeń wielkości sterujących i regulowanych, uwzględnienie interakcji wewnętrznych obiektu na podstawie jego modelu matematycznego projektowanie algorytmu regulacji dla problemów typu SISO jak i MIMO, liniowych oraz nieliniowych elastyczność wzbogacania projektowanego algorytmu o np.: metody estymacji parametrów modelu obiektu, wykorzystanie niestacjonarnych modeli obiektów, 23
24 Dlaczego sterowanie predykcyjne? możliwość operowania w zakresie wartości wielkości sterujących i regulowanych bliskich ograniczeniom optymalne sterowanie procesem uwzględnienie przyszłych zmian trajektorii referencyjnej / referencyjnych, co przekłada się na wcześniejszą reakcję regulatora 24
25 Algorytm sterowania predykcyjnego z przesuwnym horyzontem Algorytmy predykcyjne z przesuwanym horyzontem charakteryzują się tym, że podczas wyznaczania sterowania są w nich brane pod uwagę nie tylko informacje z bieżącej chwili, ale także przewidywane wartości wyjścia/wyjść (wielkości regulowane) w przyszłości, na wiele chwil do przodu, na tzw. horyzoncie predykcji. Predykcja w chwilach przyszłych dokonywana jest na podstawie dostępnych informacji o obiekcie, o występujących ograniczeniach, o przewidywanych (przyszłych) zakłóceniach i wartościach zadanych oraz innych informacji mogących poprawić jakość prognozy. 25
26 Algorytm sterowania predykcyjnego z przesuwnym horyzontem (cd.) Możliwe jest zatem efektywne wykorzystanie całej dostępnej wiedzy (o obiekcie i układzie regulacji), podczas syntezy algorytmu predykcyjnego Przyszłe sterowania są przez algorytm predykcyjny wyznaczane tak, aby przewidywane zachowanie układu regulacji spełniało założone kryteria. 26
27 Sterowanie predykcyjne z przesuwnym horyzontem - koncepcja 27
28 Sterowanie predykcyjne z przesuwnym horyzontem - koncepcja 28
29 Potencjalne wady algorytmów sterowania predykcyjnego? Do wad sterowania predykcyjnego można zaliczyć przede wszystkim: zachłanność na zasoby i czas obliczeń (algorytmy optymalizacji) dla systemów o złożonej dynamice, potrzebę budowy modelu/modeli obiektów/procesów, co może być kosztowne i wymagać odpowiedniej wiedzy o modelowanym obiekcie/procesie, fakt, iż spełnienie ograniczeń dotyczących jakości regulacji dla przyjętego modelu obiektu nie daje gwarancji ich spełnienia na obiekcie rzeczywistym (wówczas konieczna jest synteza mechanizmu krzepkodopuszczalności dla zaprojektowanego regulatora MPC), dość skomplikowaną implementację poprawnie działającego algorytmu sterowania predykcyjnego, a w szczególności prawidłowego mechanizmu predykcji oraz pewnie działających algorytmów optymalizacji. 29
30 Sterowanie predykcyjne z przesuwnym horyzontem koncepcja bardziej szczegółowo Reprezentacja modelu procesu na potrzeby predykcji: model liniowy lub nieliniowy ciągły lub dyskretny w postaci odpowiedzi impulsowych lub skokowych np..: liniowy nieliniowy x( k + 1) = A x( k) + B u( k) y( k) = C x( k) x( k + 1) = f ( x( k), u( k)) y( k) = g( x( k)) 30
31 Sterowanie predykcyjne z przesuwnym horyzontem koncepcja bardziej szczegółowo funkcja celu (postać ogólna) J N = ( ) ( ) ( ( ) ( ) ) T zad Ψ p y k + p k y k + p k +... zad ( k) y ( k + p k) y( k + p k) + p= 1 N u 1 p= 0 T ( u( k + p k) Λ( p) u( k + p k) ) Ψ( p) > 0 Λ( p) > 0 Ψ( p) = Ι Λ ( ) = λ Ι p λ 0 31
32 Sterowanie predykcyjne z przesuwnym horyzontem koncepcja bardziej szczegółowo funkcja celu (często stosowane sformułowanie) J N zad 2 ( k) y ( k + p k) y( k + p k) +... = p= 1 + λ N u 1 p= 0 u ( k + p k) 2 32
33 Sterowanie predykcyjne z przesuwnym horyzontem koncepcja bardziej szczegółowo ograniczenia wartości sygnałów sterujących u u min u ( k + p k) u p = 0,1,..., N 1 max ograniczenia przyrostów wartości sygnałów sterujących u u max u ( k + p k) u p = 0,1,..., N 1 max ograniczenia wartości sygnałów wyjściowych regulowanych y u u ( k + p k) y p 1 N y y,..., min max = ograniczenia wartości sygnałów wyjściowych nieregulowanych y n y n n ( k + p k) y max p 1,..., N n min y = 33
34 Sterowanie predykcyjne z przesuwnym horyzontem koncepcja bardziej szczegółowo zadanie optymalizacji (minimalizacji) min J u N 2 zad ( k) = y ( k + p k) y( k + p k) + λ u( k + p k) p= 1 przy ograniczeniach: u u y u min u max u max u max y min y max n min y y n y n max N u 1 p= 0 2 gdzie: u, u, y, y n to wektory zmiennych odpowiednio, na horyzoncie sterowania i predykcji 34
35 Sterowanie predykcyjne z przesuwnym horyzontem koncepcja bardziej szczegółowo zadanie optymalizacji (minimalizacji) min J u N 2 zad ( k) = y ( k + p k) y( k + p k) + λ u( k + p k) p= 1 przy ograniczeniach: u u y u min u max u max u max y y min y max n min y n y n max N u 1 p= 0 2 u = T 1 T zad ( A A + λ Ι) A ( y y) W przypadku gdy nie uwzględnia się ograniczeń a model procesu opisany jest przez serię odpowiedzi skokowych na horyzoncie predykcji, które zapisano odpowiednio w macierzy A 35
36 Sterowanie predykcyjne z przesuwnym horyzontem koncepcja bardziej szczegółowo W każdej iteracji algorytmu, czyli w każdej kolejnej dyskretnej chwili czasu k (dokładniej kt p, gdzie T p oznacza okres próbkowania, czyli okres powtarzania interwencji regulatora, k = 0,1,... ), dysponując: dynamicznym modelem obiektu, pomiarami zmiennych wyjściowych układu w chwili bieżącej i poprzednich, poprzednimi wartościami sterowania, znaną (lub założoną) trajektorią wartości zadanych wyjść regulowanych obiektu, w chwili bieżącej i chwilach przyszłych, wyznaczyć wartość sterowań w bieżącej chwili, jak i wartość sterowania w chwilach przyszłych na horyzoncie sterowania N u 36
37 Sterowanie predykcyjne z przesuwnym horyzontem koncepcja bardziej szczegółowo Sterowanie wyznaczane jest tak, aby zminimalizować różnice między wartościami regulowanych wyjść obiektu, przewidywanymi w chwili k na chwilę k+p, a wartościami zadanymi dla tych wyjść (też na chwilę k+p ), na horyzoncie predykcji N ( p = 1,2,...,N ). Minimalizacja różnic rozumiana jest w sensie określonego kryterium jakości regulacji funkcja kryterialna (funkcja celu). Do sterowania wyznaczany jest jedynie pierwszy element tak wyznaczonego optymalnego ciągu wartości sterowań. W kolejnej chwili (k+1)t p następuje nowy pomiar wyjścia obiektu i cała procedura jest powtarzana, z horyzontem predykcji o niezmienionej długości N. 37
38 38

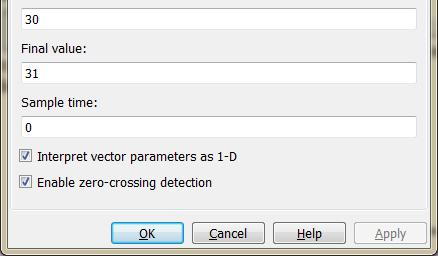
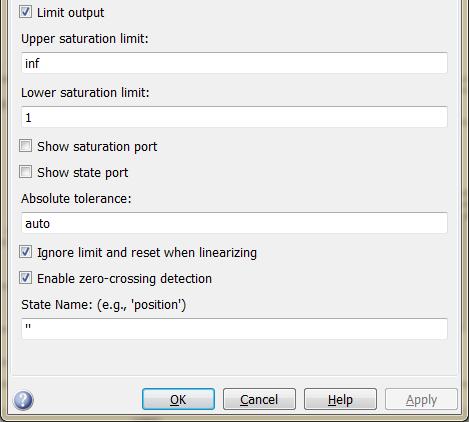
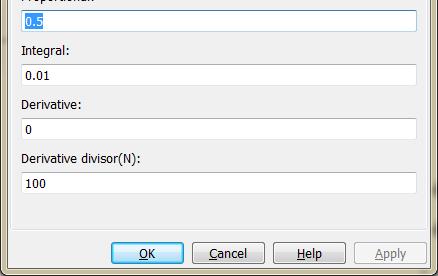
39 . MPC przykład 1 39

40 . MPC przykład 1 40

41 . MPC przykład 1 41

42 . MPC przykład 1 42

43 . MPC przykład 1 43
44 MPC przykład 1 Funkcja celu: min J= 44
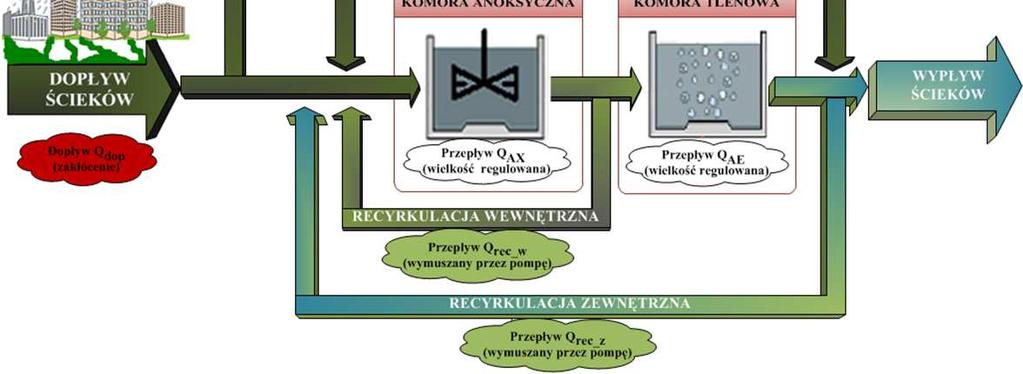
45 MPC przykład 1 Ograniczenia: zmienna decyzyjna dopuszczalny przedział wartości przyrost dopuszczalny przedział wartości u ret < ; 5000 > [m 3 /d] u ret < ; 2000 > [m 3 /d] u rec_w ( 0 ; 60 > [%] Q rec _ w < ; 1000 > [m 3 /d] u rec_z ( 0 ; 200 > [%] Q rec_z < ; 1000 > [m 3 /d] horyzont czasu < k 0 ; k 0 + p > horyzont czasu < k 0 ; k 0 + s > zmienna regulowana dopuszczalny przedział wartości Q AX Q AE h 0:00 < 9000 ; > [m 3 /d] < 8000 ; > [m 3 /d] < 3,5 ; 5,5 > [m] horyzont czasu < k 0 ; k 0 + s > 45
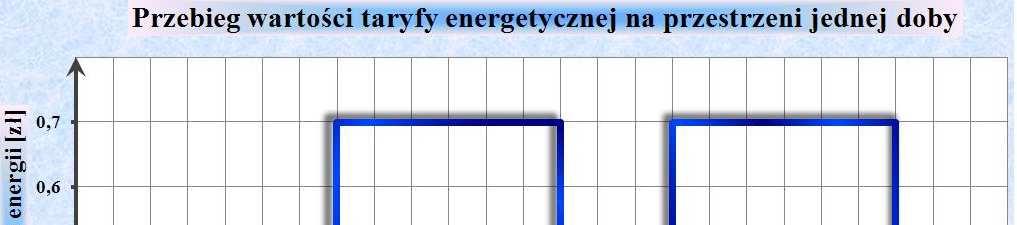

46 Taryfa energetyczna: MPC przykład 1 46


47 MPC przykład 1 Wariant 1: brak w funkcji celu składnika kosztów operacyjnych 47
48 MPC przykład 1 Wariant 1: brak w funkcji celu składnika kosztów operacyjnych 48


49 MPC przykład 1 Wariant 1: brak w funkcji celu składnika kosztów operacyjnych 49


50 MPC przykład 1 Wariant 1: brak w funkcji celu składnika kosztów operacyjnych 50


51 MPC przykład 1 Wariant 2: funkcja celu ze składnikiem kosztów operacyjnych 51


52 MPC przykład 1 Wariant 2: funkcja celu ze składnikiem kosztów operacyjnych 52

53 MPC przykład 1 Wariant 2: funkcja celu ze składnikiem kosztów operacyjnych 53


54 MPC przykład 1 Wariant 2: funkcja celu ze składnikiem kosztów operacyjnych 54
55 MPC przykład 1 Zestawienie realnych kosztów operacyjnych dla obu analizowanych wariantów: analizowany wariant Wariant I Wariant II optymalizacja kosztów nie tak koszty operacyjne [zł] 7201, ,28 55
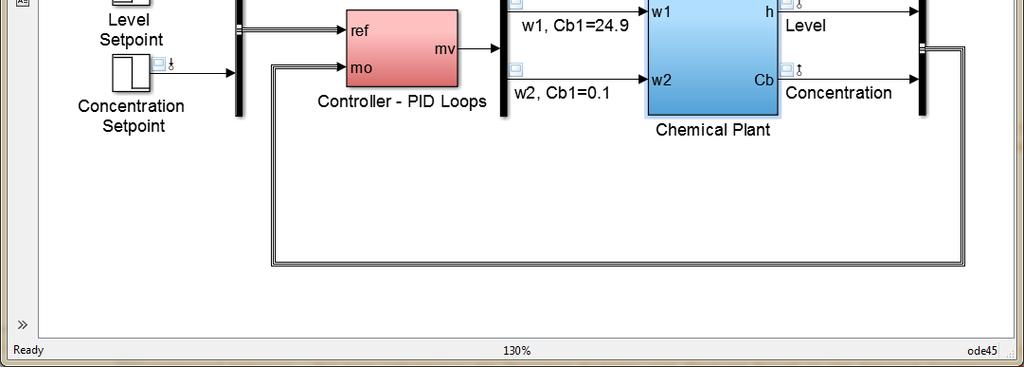
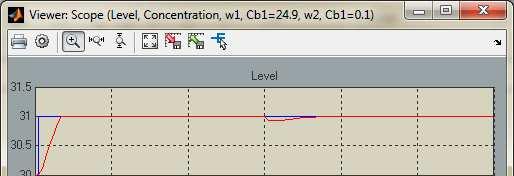
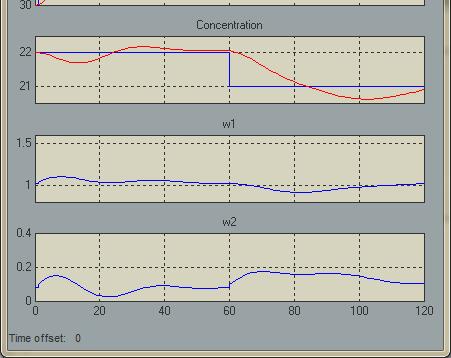
56 MPC przykład 2 realizacja w Matlab/Simulink Zadanie obejmuje następujące dwa główne elementy: Krok 1: budowa modelu symulacyjnego układu sterowania, odpowiednio poziomem produktu w reaktorze i stężeniem produktu na wypływie z reaktora, z regulatorami PID, Krok 2: synteza regulatora MPC, w określonym punkcie pracy, poziomem produktu w reaktorze i stężeniem produktu na wypływie z reaktora. 56
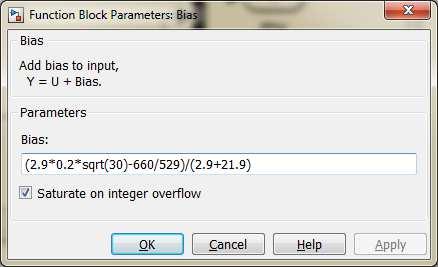
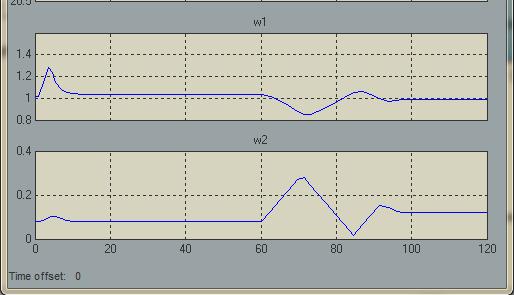
57 MPC przykład 2 realizacja w Matlab/Simulink h W 1, C b1 W 2, C b2 W 0, C b W1 - natężenie dopływu substratu Cb1 W2 - natężenie dopływu substratu Cb2 W0 - natężenie odpływu produktu Cb h - poziom produktu Stałe stężenia substratów Cb1 i Cb2 w dopływach odpowiednio 24.9 i 0.1 Zmienne decyzyjne: W1, W2 Zmienne kontrolowane: h, Cb Zadanie sterowania: - utrzymać Cb na poziomie 22 - utrzymać h na poziomie 30 - ograniczenia przedziału zmian W1 <0; 4> - ograniczenia prędkości zmian W1 <-0.1; 0.1> - ograniczenia przedziału zmian W2 <0; 1> - ograniczenia prędkości zmian W2 <-0.02; 0.02> 57
58 MPC przykład 2 realizacja w Matlab/Simulink Krok 1 58

59 MPC przykład 2 realizacja w Matlab/Simulink Krok 1 59

60 MPC przykład 2 realizacja w Matlab/Simulink Krok 1 60

61 MPC przykład 2 realizacja w Matlab/Simulink Krok 1 61

62 MPC przykład 2 realizacja w Matlab/Simulink Krok 1 62

63 MPC przykład 2 realizacja w Matlab/Simulink Krok 1 63

64 MPC przykład 2 realizacja w Matlab/Simulink Krok 1 64

65 Krok 1 MPC przykład 2 realizacja w Matlab/Simulink 65
66 Krok 1 MPC przykład 2 realizacja w Matlab/Simulink Zadanie 1: Zmieniając parametry regulatorów PID polepszyć jakość działania procesu. Należy zaproponować odpowiedni wskaźnik jakości działania układu sterowania np.. wykorzystując kryterium całkowe całka z kwadratu uchybu sterowania. Zadanie do realizacji w trakcie laboratoriów. Wykorzystanie zdobytej dotychczas wiedzy inżynierskiej. 66
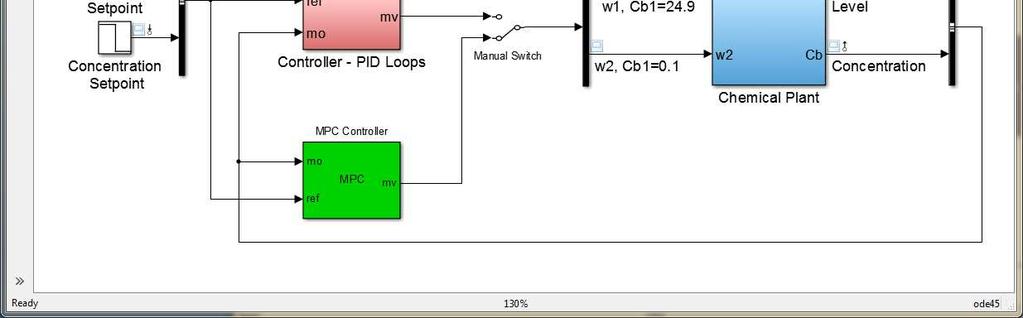
67 Krok 2 MPC przykład 2 realizacja w Matlab/Simulink Zadanie 2: Zaprojektować liniowy regulator MPC dla rozważanego procesu. Przykład z wykorzystaniem zbudowanego wcześniej modelu symulacyjnego procesu oraz narzędzi wbudowanych w Matlab/Simulink (analiza liniowa - linearyzacja w wybranym punkcie pracy) 67

68 MPC przykład 2 realizacja w Matlab/Simulink Krok 2 68


69 MPC przykład 2 realizacja w Matlab/Simulink 69


70 MPC przykład 2 realizacja w Matlab/Simulink 70
71 Krok 2 MPC przykład 2 realizacja w Matlab/Simulink 71

72 Krok 2 MPC przykład 2 realizacja w Matlab/Simulink 72

73 Krok 2 MPC przykład 2 realizacja w Matlab/Simulink 73
74 MPC przykład 2 realizacja w Matlab/Simulink 74
75 MPC przykład 3 realizacja w Matlab/Simulink 75


76 MPC przykład 3 realizacja w Matlab/Simulink 76


77 MPC przykład 3 realizacja w Matlab/Simulink 77

78 MPC przykład 3 realizacja w Matlab/Simulink 78


79 MPC przykład 3 realizacja w Matlab/Simulink 79

80 MPC przykład 2 realizacja w Matlab/Simulink 80

81 MPC przykład 2 realizacja w Matlab/Simulink PID MPC2 81
82 MPC przykład 2 realizacja w Matlab/Simulink Zadanie 3: Zweryfikować działanie zaprojektowanego regulatora MPC przy jego różnych ustawieniach, przeanalizować wpływ zmiany następujących parametrów na jakość działania układu: - horyzont sterowania, - horyzont predykcji, - wagi w funkcji celu. 82

83 MPC przykład 2 realizacja w Matlab/Simulink 83


84 MPC przykład 3 realizacja w Matlab/Simulink 84
85 MPC przykład 3 realizacja w Matlab/Simulink 85


86 MPC przykład 2 realizacja w Matlab/Simulink 86


87 MPC przykład 2 realizacja w Matlab/Simulink 87

88 MPC przykład 2 realizacja w Matlab/Simulink 88


89 MPC przykład 3 realizacja w Matlab/Simulink 89


90 MPC przykład 3 realizacja w Matlab/Simulink 90


91 MPC przykład 3 realizacja w Matlab/Simulink 91


92 MPC przykład 2 realizacja w Matlab/Simulink 92

93 MPC przykład 2 realizacja w Matlab/Simulink MPC2 MPC3 93
94 MPC przykład 2 realizacja w Matlab/Simulink Zadanie: Zweryfikować działanie regulatora MPC dla różnych punktów pracy. 94
95 Krok 2 MPC przykład 2 realizacja w Matlab/Simulink Dalszy ciąg na zajęciach laboratoryjnych ;) 95
96 Bibliografia [1] Camacho E.F., Bordons C. (2004). Model Predictive Control. SpringerBVerlag, London Limited.. [2] Maciejowski J.M. (2002). Predictive Control with Constraints. Prentice Hall, Pearson Education Ltd. Harlowe, England. [3] Tatjewski P. (2002). Sterowanie zaawansowane obiektów przemysłowych, Struktury i algorytmy. Akademicka Oficyna Wydawnicza EXIT, Warszawa. [4] Mathworks Webinar. Introduction to Model Predictive Control Toolbox [5] Pękalski P., Nałęcz P. (2011). Nadzorowane sterowanie predykcyjne biologiczną oczyszczalnią ścieków. Praca dyplomowa na WEIA PG pod opieką: dr inż. T. Rutkowskiego i dr inż. M. Grochowskiego. 96
97 Dziękuję za uwagę!!! 97
Model Predictive Control podstawy
 Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2015/2016 1 Plan wykładu Część I:
Model Predictive Control podstawy Politechnika Gdańska Wydział Elektrotechniki i Automatyki Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2015/2016 1 Plan wykładu Część I:
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Tematy magisterskie: Lp. Sugerowany stopień, kierunek studiów oraz specjalność Elektrotechnika Magisterska Dr hab. inż.
 Katedra Automatyki i Elektroniki Wydział Elektryczny Zgodnie z procedurą dyplomowania na Wydziale, poniżej przedstawiono tematy prac dyplomowych dla studentów Elektrotechnika oraz Telekomunikacja kończących
Katedra Automatyki i Elektroniki Wydział Elektryczny Zgodnie z procedurą dyplomowania na Wydziale, poniżej przedstawiono tematy prac dyplomowych dla studentów Elektrotechnika oraz Telekomunikacja kończących
Cyfrowe algorytmy sterowania AR S1 semestr 4 Projekt 4
 Cyfrowe algorytmy sterowania AR S1 semestr 4 Projekt 4 MPC Sterowanie predykcyjne Cel: Poznanie podstaw regulacji predykcyjnej i narzędzi do badań symulacyjnych Wykonali: Konrad Słodowicz Patryk Frankowski
Cyfrowe algorytmy sterowania AR S1 semestr 4 Projekt 4 MPC Sterowanie predykcyjne Cel: Poznanie podstaw regulacji predykcyjnej i narzędzi do badań symulacyjnych Wykonali: Konrad Słodowicz Patryk Frankowski
INTELIGENTNE SYSTEMY STEROWANIA OPRACOWANIE
 Arkadiusz Kwiatkowski INTELIGENTNE SYSTEMY STEROWANIA OPRACOWANIE Nie biorę odpowiedzialności za skutki błędów zawartych w opracowaniu. 1. Schemat inteligentnego sensora inteligentny sensor zintegrowany
Arkadiusz Kwiatkowski INTELIGENTNE SYSTEMY STEROWANIA OPRACOWANIE Nie biorę odpowiedzialności za skutki błędów zawartych w opracowaniu. 1. Schemat inteligentnego sensora inteligentny sensor zintegrowany
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania MODELOWANIE I IDENTYFIKACJA Studia niestacjonarne Estymacja parametrów modeli, metoda najmniejszych kwadratów.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania MODELOWANIE I IDENTYFIKACJA Studia niestacjonarne Estymacja parametrów modeli, metoda najmniejszych kwadratów.
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
E2_PA Podstawy automatyki Bases of automatic. Elektrotechnika II stopień (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny)
 Ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. P KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. P KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
1. Podstawowe pojęcia
 1. Podstawowe pojęcia Sterowanie optymalne obiektu polega na znajdowaniu najkorzystniejszej decyzji dotyczącej zamierzonego wpływu na obiekt przy zadanych ograniczeniach. Niech dany jest obiekt opisany
1. Podstawowe pojęcia Sterowanie optymalne obiektu polega na znajdowaniu najkorzystniejszej decyzji dotyczącej zamierzonego wpływu na obiekt przy zadanych ograniczeniach. Niech dany jest obiekt opisany
SIMATIC S Regulator PID w sterowaniu procesami. dr inż. Damian Cetnarowicz. Plan wykładu. I n t e l i g e n t n e s y s t e m y z e
 Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Regulator P (proporcjonalny)
") Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
Realizacje regulatorów PID w sterownikach PLC Siemens S7-1200
 D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
Komputerowe Systemy Sterowania
 KSS 2011 Komputerowe Systemy Sterowania Struktury Sterowania wprowadzenie - Częśd I - dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania Politechnika Gdańska Wydział Elektrotechniki i Automatyki
KSS 2011 Komputerowe Systemy Sterowania Struktury Sterowania wprowadzenie - Częśd I - dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania Politechnika Gdańska Wydział Elektrotechniki i Automatyki
Wektorowa regulacja predykcyjna z linearyzacją modelu na przykładzie sterowania temperatury i wilgotności względnej powietrza w szklarni
 ARTYKUŁ NAUKOWY RECENZOWANY.pl Jarosław HALENDA, Wojciech TARNOWSKI Instytut Technologii i Edukacji Politechnika Koszalińska Streszczenie lin Wektorowa regulacja predykcyjna z linearyzacją modelu na przykładzie
ARTYKUŁ NAUKOWY RECENZOWANY.pl Jarosław HALENDA, Wojciech TARNOWSKI Instytut Technologii i Edukacji Politechnika Koszalińska Streszczenie lin Wektorowa regulacja predykcyjna z linearyzacją modelu na przykładzie
Sterowanie optymalne
 Sterowanie optymalne Sterowanie Procesami Ciągłymi 2017 Optymalizacja statyczna funkcji Funkcja celu/kryterialna/kosztów Ograniczenie Q(x) min x x = arg min Q(x) x x X, gdzie X zbiór rozwiązań dopuszczalnych
Sterowanie optymalne Sterowanie Procesami Ciągłymi 2017 Optymalizacja statyczna funkcji Funkcja celu/kryterialna/kosztów Ograniczenie Q(x) min x x = arg min Q(x) x x X, gdzie X zbiór rozwiązań dopuszczalnych
Wykład organizacyjny
 Automatyka - zastosowania, metody i narzędzia, perspektywy na studiach I stopnia specjalności: Automatyka i systemy sterowania Wykład organizacyjny dr inż. Michał Grochowski kiss.pg.mg@gmail.com michal.grochowski@pg.gda.pl
Automatyka - zastosowania, metody i narzędzia, perspektywy na studiach I stopnia specjalności: Automatyka i systemy sterowania Wykład organizacyjny dr inż. Michał Grochowski kiss.pg.mg@gmail.com michal.grochowski@pg.gda.pl
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII. Roman Kaula
 POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Teoria sterowania Control theory. Elektrotechnika I stopień ogólnoakademicki. niestacjonarne. przedmiot kierunkowy
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Teoria sterowania Control theory A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Teoria sterowania Control theory A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Podstawy automatyki Bases of automatic
 KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod Nazwa Nazwa w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Podstawy automatyki
KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod Nazwa Nazwa w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Podstawy automatyki
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Automatyka i sterowanie w gazownictwie. Regulatory w układach regulacji
 Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA
 II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy Anti-windup.
 Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy Anti-windup.") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowanie napędów maszyn i robotów
 Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Sterowanie napędów maszyn i robotów
 Wykład 8 - zaawansowane układy sterowania Instytut Automatyki i Robotyki Warszawa, 2014 adaptacyjne (ang. adaptive control) z dostosowaniem się do aktualnych warunków pracy napędu - koncepcje: ze wstępnie
Wykład 8 - zaawansowane układy sterowania Instytut Automatyki i Robotyki Warszawa, 2014 adaptacyjne (ang. adaptive control) z dostosowaniem się do aktualnych warunków pracy napędu - koncepcje: ze wstępnie
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Egzamin / zaliczenie na ocenę*
 Zał. nr do ZW /01 WYDZIAŁ / STUDIUM KARTA PRZEDMIOTU Nazwa w języku polskim Identyfikacja systemów Nazwa w języku angielskim System identification Kierunek studiów (jeśli dotyczy): Inżynieria Systemów
Zał. nr do ZW /01 WYDZIAŁ / STUDIUM KARTA PRZEDMIOTU Nazwa w języku polskim Identyfikacja systemów Nazwa w języku angielskim System identification Kierunek studiów (jeśli dotyczy): Inżynieria Systemów
1. Cel projektu. Sprawdzić wpływ ograniczeń sygnału sterującego oraz ograniczeń przyrostów sygnału sterującego.
 1. Cel projektu. Przeprowadzić badania symulacyjne układu regulacji z liniowym regulatorem predykcyjnym GPC oraz obiektem G(s) z zadania nr 1, dla skokowej zmiany wartości zadanej z 0 na 0.5. Jako model
1. Cel projektu. Przeprowadzić badania symulacyjne układu regulacji z liniowym regulatorem predykcyjnym GPC oraz obiektem G(s) z zadania nr 1, dla skokowej zmiany wartości zadanej z 0 na 0.5. Jako model
Metodyka projektowania systemów sterowania Uwagi wstępne
 Uwagi wstępne Inżynieria sterowania (Control Engineering) odgrywa dziś fundamentalną rolę w nowoczesnych systemach technologicznych, Korzyści ze sterowania w przemyśle,. mogą być wielorakie - poprawa jakości
Uwagi wstępne Inżynieria sterowania (Control Engineering) odgrywa dziś fundamentalną rolę w nowoczesnych systemach technologicznych, Korzyści ze sterowania w przemyśle,. mogą być wielorakie - poprawa jakości
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Podstawy automatyki Bases of automatics. Elektrotechnika I stopień (I stopień / II stopień) ogólno akademicki (ogólno akademicki / praktyczny)
 ogólno akademicki (ogólno akademicki / praktyczny)") KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK
 Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Regulatory wykonywane są z zaworami zamykanymi lub otwieranymi przy wzroście temperatury. Pozycja temperatury może być ukośna, pozioma lub pionowa.
 27. Rodzaje regulatorów w instalacjach przemysłowych. I podział: Regulatory Regulatory są urządzeniami technicznymi, służącymi do wytwarzania na podstawie uchybu regulacji sygnału sterującego, to jest
27. Rodzaje regulatorów w instalacjach przemysłowych. I podział: Regulatory Regulatory są urządzeniami technicznymi, służącymi do wytwarzania na podstawie uchybu regulacji sygnału sterującego, to jest
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Rok akademicki: 2030/2031 Kod: RAR n Punkty ECTS: 7. Poziom studiów: Studia I stopnia Forma i tryb studiów: -
 Nazwa modułu: Podstawy automatyki Rok akademicki: 2030/2031 Kod: RAR-1-303-n Punkty ECTS: 7 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Nazwa modułu: Podstawy automatyki Rok akademicki: 2030/2031 Kod: RAR-1-303-n Punkty ECTS: 7 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa.
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyka i Regulacja Automatyczna SEIwE- sem.4
 Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Realizacja programowa algorytmu sterowania adaptacyjnopredykcyjnego. KSSiWD 2013 dr inż. Jarosław Tarnawski
 Realizacja programowa algorytmu sterowania adaptacyjnopredykcyjnego ampc KSSiWD 2013 dr inż. Jarosław Tarnawski Sterowanie MPC Istnieje wiele odmian sterowania predykcyjnego jednak we wszystkich z nich
Realizacja programowa algorytmu sterowania adaptacyjnopredykcyjnego ampc KSSiWD 2013 dr inż. Jarosław Tarnawski Sterowanie MPC Istnieje wiele odmian sterowania predykcyjnego jednak we wszystkich z nich
AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH
 AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH kierunek Automatyka i Robotyka Studia II stopnia specjalności Automatyka Dr inż. Zbigniew Ogonowski Instytut Automatyki, Politechnika Śląska Plan wykładu pojęcia
AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH kierunek Automatyka i Robotyka Studia II stopnia specjalności Automatyka Dr inż. Zbigniew Ogonowski Instytut Automatyki, Politechnika Śląska Plan wykładu pojęcia
Rys. 1 Otwarty układ regulacji
 Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
1. Opis teoretyczny regulatora i obiektu z opóźnieniem.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
MATERIAŁY POMOCNICZE
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Projekt hierarchicznego systemu sterowania zaopatrywania w wodę ETAP
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Projekt hierarchicznego systemu sterowania zaopatrywania w wodę ETAP
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Platforma Systemowa Wonderware przykład zaawansowanego systemu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Platforma Systemowa Wonderware przykład zaawansowanego systemu
Filtr Kalmana. Struktury i Algorytmy Sterowania Wykład 1-2. prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz
 Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki 2013-10-09, Gdańsk Założenia
Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki 2013-10-09, Gdańsk Założenia
Sterowanie napędów maszyn i robotów
 Wykład 5 - Identyfikacja Instytut Automatyki i Robotyki (IAiR), Politechnika Warszawska Warszawa, 2015 Koncepcje estymacji modelu Standardowe drogi poszukiwania modeli parametrycznych M1: Analityczne określenie
Wykład 5 - Identyfikacja Instytut Automatyki i Robotyki (IAiR), Politechnika Warszawska Warszawa, 2015 Koncepcje estymacji modelu Standardowe drogi poszukiwania modeli parametrycznych M1: Analityczne określenie
Sterowanie z wykorzystaniem logiki rozmytej
 Sterowanie z wykorzystaniem logiki rozmytej konspekt seminarium Paweł Szołtysek 24 stycznia 2009 1 Wstęp 1.1 Podstawy logiki rozmytej Logika rozmyta jest rodzajem logiki wielowartościowej, stanowi uogólnienie
Sterowanie z wykorzystaniem logiki rozmytej konspekt seminarium Paweł Szołtysek 24 stycznia 2009 1 Wstęp 1.1 Podstawy logiki rozmytej Logika rozmyta jest rodzajem logiki wielowartościowej, stanowi uogólnienie
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Automatyzacja. Ćwiczenie 9. Transformata Laplace a sygnałów w układach automatycznej regulacji
 Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Prof. dr hab. inż. Lech M. Grzesiak Politechnika Warszawska, Wydział Elektryczny
 Prof. dr hab. inż. Lech M. Grzesiak Politechnika Warszawska, Wydział Elektryczny Recenzja rozprawy doktorskiej mgr. inż. Karola Tatara pt. Synteza regulatorów ślizgowych dla przetworników energoelektronicznych
Prof. dr hab. inż. Lech M. Grzesiak Politechnika Warszawska, Wydział Elektryczny Recenzja rozprawy doktorskiej mgr. inż. Karola Tatara pt. Synteza regulatorów ślizgowych dla przetworników energoelektronicznych
Automatyka w inżynierii środowiska. Wykład 1
 Automatyka w inżynierii środowiska Wykład 1 Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 21.01.2012 Obecność na wykładach: zalecana. Zakres tematyczny przedmiotu: (10 godzin wykładów) Standardowe
Automatyka w inżynierii środowiska Wykład 1 Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 21.01.2012 Obecność na wykładach: zalecana. Zakres tematyczny przedmiotu: (10 godzin wykładów) Standardowe
Temat: Projektowanie sterownika rozmytego. Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE
 Temat: Projektowanie sterownika rozmytego Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1 Wprowadzenie System
Temat: Projektowanie sterownika rozmytego Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1 Wprowadzenie System
AiR_TR2_5/9 Teoria Regulacji II Control Theory II. Automatyka i Robotyka I stopień ogólno akademicki studia niestacjonarne
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
PROGRAM KSZTAŁCENIA dla kierunku automatyka i robotyka studiów pierwszego stopnia o profilu ogólnoakademickim
 PROGRAM KSZTAŁCENIA dla kierunku automatyka i robotyka studiów pierwszego stopnia o profilu ogólnoakademickim Program kształcenia dla określonego kierunku, poziomu studiów i profilu kształcenia obejmuje
PROGRAM KSZTAŁCENIA dla kierunku automatyka i robotyka studiów pierwszego stopnia o profilu ogólnoakademickim Program kształcenia dla określonego kierunku, poziomu studiów i profilu kształcenia obejmuje
Rys 1 Schemat modelu masa- sprężyna- tłumik
 Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Sreszczenie. Słowa kluczowe: sterowanie, poziom cieczy, regulator rozmyty
 Ewa Wachowicz Katedra Systemów Sterowania Politechnika Koszalińska STEROWANIE POZIOMEM CIECZY W ZBIORNIKU Z WYKORZYSTANIEM REGULATORA ROZMYTEGO Sreszczenie W pracy omówiono układ regulacji poziomu cieczy,
Ewa Wachowicz Katedra Systemów Sterowania Politechnika Koszalińska STEROWANIE POZIOMEM CIECZY W ZBIORNIKU Z WYKORZYSTANIEM REGULATORA ROZMYTEGO Sreszczenie W pracy omówiono układ regulacji poziomu cieczy,
REGULATOR PI W SIŁOWNIKU 2XI
 REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych prof. dr hab. inż.
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych prof. dr hab. inż.
4. Właściwości eksploatacyjne układów regulacji Wprowadzenie. Hs () Ys () Ws () Es () Go () s. Vs ()
 Ys () Ws () Es () Go () s. Vs ()") 4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
Implementacja rozmytego algorytmu DMC z ograniczeniami na sterowniku PLC
 Mgr inż. Piotr Marusak Instytut Automatyki i Informatyki Stosowanej Politechniki Warszawskiej Implementacja rozmytego algorytmu DMC z ograniczeniami na sterowniku PLC W referacie przedstawiono przykład
Mgr inż. Piotr Marusak Instytut Automatyki i Informatyki Stosowanej Politechniki Warszawskiej Implementacja rozmytego algorytmu DMC z ograniczeniami na sterowniku PLC W referacie przedstawiono przykład
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie. Sterowanie ciągłe. Teoria sterowania układów jednowymiarowych
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Sterowanie ciągłe Teoria sterowania układów jednowymiarowych 1 Informacja o prowadzących zajęcia Studia stacjonarne rok II Automatyka i Robotyka
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Sterowanie ciągłe Teoria sterowania układów jednowymiarowych 1 Informacja o prowadzących zajęcia Studia stacjonarne rok II Automatyka i Robotyka
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Transmitancje układów ciągłych
 Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Analityczne metody detekcji uszkodzeń
 Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 5 Model procesu Rozważmy czasowo-dyskretny model liniowy gdzie: k dyskretny czas, x(k) R n wektor stanu, x(k + 1) = Ax(k)
Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 5 Model procesu Rozważmy czasowo-dyskretny model liniowy gdzie: k dyskretny czas, x(k) R n wektor stanu, x(k + 1) = Ax(k)
Opis systemów dynamicznych w przestrzeni stanu. Wojciech Kurek , Gdańsk
 Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Problemy optymalizacji układów napędowych w automatyce i robotyce
 Akademia Górniczo-Hutnicza im. Stanisława Staszica Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Katedra Automatyki Autoreferat rozprawy doktorskiej Problemy optymalizacji układów napędowych
Akademia Górniczo-Hutnicza im. Stanisława Staszica Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Katedra Automatyki Autoreferat rozprawy doktorskiej Problemy optymalizacji układów napędowych
Dla naszego obiektu ciągłego: przy czasie próbkowania T p =2.
 1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone