Filtr Kalmana. Struktury i Algorytmy Sterowania Wykład 1-2. prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz
|
|
|
- Daniel Markiewicz
- 6 lat temu
- Przeglądów:
Transkrypt


1 Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki , Gdańsk
2 Założenia odnośnie filtru Kalmana Przystępując do syntezy filtru Kalmana przyjmuje się następujące założenia: minimum kowariancji liniowość filtru estymaty stanu są nieobciążone: E {x(k)} = E {ˆx(k)}, gdzie ˆx(k) jest estymatą stanu x(k)
3 Dynamika modelu systemu Równania stanu Niech dany będzie liniowy niestacjonarny model dynamiki systemu: gdzie: x (k + 1) = A (k) x (k) + B (k) u (k) + G (k) z (k) (1) x (k) wektor stanu systemu u (k) wektor wejść sterowanych z (k) wektor wejść zakłócających A (k), B (k), G (k) są odpowiednio niestacjonranymi macierzami stanu systemu, wejść i zakłóceń
4 Dynamika modelu systemu Równania wyjścia Równanie wyjścia dane jest zależnością: y (k) = C (k) x (k) + v (k) (2) gdzie: y (k) wektor wyjść systemu v (k) wektor szumów pomiarowych C (k) macierz wyjść
5 Dynamika modelu systemu Zakłócenia i szumy pomiarowe Zakłada się, że zakłócenia z (k) oraz szumy pomiarowe v (k) są sygnałami stochastycznymi takmi, że: E {z (k)} = 0 cov (z (k)) = E {(z } (k) E {z (k)}) (z (k) E {z (k)}) T { } = E z (k) z T (k) = Z (k) (3) E {v (k)} = 0 cov (v (k)) = E {(v } (k) E {v (k)}) (v (k) E {v (k)}) T { } = E v (k) v T (k) = V (k) (4)
6 Dynamika modelu systemu Zakłócenia i szumy pomiarowe c.d. Autokoralecja zakłóceń i szumów jest równa zeru { } E z (k) z T (j) = 0 ; j k E { } v (k) v T (j) = 0 ; j k (5) Ponadto zakłada się, że nie istnieje korelacja pomiędzy zakłóceniami i szumami pomiarowymi: { } E z (k) v T (j) = 0 (6) dla k j (dla uproszczenia)
7 Dynamika modelu systemu Warunki początkowe Zakłada się, że warunki początkowe x 0 są znane i w opraciu o ich znajomość mozna wyznaczyć: E E {x 0 } { } x 0 x T 0 = P 0 (7) gdzie: P 0 macierz kowariancji Zanjomość P 0 jest niezbędna do zainicjowania algorytmu filtru Kalmana
8 Problem Sformułowanie Poszukiwany jest: rekursywny estymator ˆx(k) stanu systemu x (k) który jest liniowy w odniesieniu do pomiarów y (1), y (2),..., y (k) nieobciążony: E {ˆx} = E {x} optymalny: posiada minimalną kowariancję błędu P (k), gdzie { } P (k) = E e (k) e T (k), e (k) = x (k) ˆx (k) to jest dla każdego wektora p i macierzy T, takiego, że p 0 zachodzi: p T P (k) p p T Tp (8)
9 Problem Spostrzeżenie Niech a będzie wektorem. Rozważ liniową funkcję: a T x (k) (9) Błąd średniokwadratowy dla tej funckji wyraża się: [ ( ( ) ] T E a T x (k) a T ˆx (k)) a T x (k) a T ˆx (k) = = E = E [ ( ( ) ] T a T (x (k) ˆx (k))) a T (x (k) ˆx (k)) [ ] [ ] a T e (k) a T e (k) = E a T e (k) e T (k) a (10) = a T E [ ] e (k) e T (k) a = a T P (k) a minimum
10 Problem Spostrzeżenie c.d. 1 Minimalizowany jest błąd średnio kwadratowy w kotekście każdej zmiennej stanu z osobna 2 Minimalizowana jest norma błędu średnio kwadratowego, np.: E [ ] e1 2 + e en 2 minimum (11)
11 Wyprowadzenie Liniowość i rekursywność Wychodząc z założenia o liniowości i rekursywności poszukiwanego estymatora: ˆx (k) = Jˆx (k 1) + Ky (k) + Lu (k 1) (12) gdzie: J,K,L są poszukiwanymi macierzami takimi, że ˆx (k) jest: nieobciążona estymatą stanu gwarantującą minimum kowariancji błędu estymacji
12 Wyprowadzenie Nieobciążoność Wykorzystując założenie o nieobciążoności estymat: E {ˆx (k)} = E {Jˆx (k 1) + Ky (k) + Lu (k 1)} = = JE {ˆx (k 1)} + KE {y (k)} + Lu (k 1) (13) = E {x (k)}
13 Wyprowadzenie Nieobciążoność c.d. Ponieważ ˆx (k 1) jest również nieobciążona: E {ˆx (k)} = JE {ˆx (k 1)} + KE {C(k)x (k) + v (k)} + Lu (k 1) = = JE {x (k 1)} + KC(k)E {x (k)} + Lu (k 1) = = JE {x (k 1)} + KC(k)E +Lu (k 1) = A (k 1) x (k 1) + B (k 1) u (k 1) + G (k 1) z (k 1) + = JE {x (k 1)} + KC(k)A (k 1) E {x (k 1)} + +KC(k)B (k 1) u (k 1) + Lu (k 1) (14)
14 Wyprowadzenie Nieobciążoność c.d. Wykorzystując fakt, że: E {ˆx(k)} = E {x(k)} oraz: E {x(k)} = A(k 1)E {x(k 1)} + B(k 1)u (k 1) (15) E {ˆx (k)} = JE {x (k 1)} + KC(k)A (k 1) E {x (k 1)} + +KC(k)B (k 1) u (k 1) + Lu (k 1) (16) można wyznaczyć wartości macierzy J oraz L
15 Wyprowadzenie Wartości macierzy J i L Z porównania równań (15) oraz (16) wynika: J + KC(k)A (k 1) = A (k 1) L + KC(k)B (k 1) = B (k 1) (17) skąd w rezultacie otrzymano: J(k) = (I KC(k)) A (k 1) L(k) = (I KC(k)) B (k 1) (18) UWAGA: macierze J(k) i L(k) są niestacjonarne!
16 Struktura estymatora predyktor - korektor Wykorzystując J(k) i L(k), ˆx (k) przyjmuje postać: ˆx (k) = [I KC(k)] A (k 1) ˆx (k 1) + + [I KC(k)] B (k 1) u (k 1) + Ky(k) (19) co po uporządkowaniu: ˆx (k) = A (k 1) ˆx (k 1) + B (k 1) u (k 1) + +K [y(k) C(k) (A(k 1)ˆx(k 1)) + B(k 1)u(k 1)] (20) gdzie: A (k 1) ˆx (k 1) + B (k 1) u (k 1) stanowi predykcję stanu systemu x (k) liczoną w opraciu o dane z chwili k 1, co oznaczamy: ˆx (k k 1) Cˆx(k k 1) stanowi predykcję pomiaru y(k) wykonaną w chwili k 1, co oznaczamy: ŷ (k k 1).
17 Struktura estymatora predyktor - korektor c.d. Struktura estymatora ma ogólną postać: ˆx (k) }{{} = ˆx (k k 1) }{{} + K [y(k) ŷ (k k 1)] }{{} aktualna estymata predykcja stanu }{{} } predykcja błedu pomiarowego {{} człon predykcyjny człon korekcyjny (21) gdzie: ŷ(k k 1) jest to wektor predykcji pomiarow y(k): ŷ(k k 1) = Cˆx(k k 1) ˆx(k k 1) jest to predykcja estymaty stanu ˆx(k): ˆx(k k 1) = A(k 1)ˆx(k 1) + B(k 1)u(k 1) wyznaczana w chwili k jako transfer ˆx(k 1) zgodny z równaniami stanu systemu, gdzie z(k 1) zastąpione jest przez E {z(k 1)} = 0
18 Błąd predykcji Definiując błąd predykcji jako: e(k k 1) = x(k) ˆx(k k 1) (22) wykorzystując równania stanu x(k) rozważanego systemu oraz wyznaczoną predykcję estymaty stanu ˆx(k k 1): e(k k 1) = A(k 1)x(k 1) + B(k 1)u(k 1)+ +G(k 1)z(k 1)+ (23) A(k 1)ˆx(k 1) B(k 1)u(k 1)
19 Błąd predykcji c.d. Wykorzystując definicję błedu predykcji oraz redukując B(k 1)u(k 1) otrzymano: e(k k 1) = A(k 1)e(k 1) + G(k 1)z(k 1) (24) A(k 1)e(k 1) dynamika wewnętrzna błędu predykcji zależna od dynamiki stanu systemu G(k 1)z(k 1) wpływ zakłóceń stanu systemu na błąd predykcji
20 Kowaraincja błędu predykcji Wyznaczanie kowaraincji błędu predykcji P(k k 1): P(k k 1) = E { [e(k k 1) E {e(k k 1)}] [ ] T } = = E e(k k 1) A(k 1) E {e(k 1)} [ ] T }{{} = =0 = E { } e(k k 1)e T (k k 1)
21 Kowaraincja błędu predykcji c.d. Kontynuując: P(k k 1) = E = E { } e(k k 1)e T (k k 1) { [A(k 1)e(k 1) + G(k 1)z(k 1)] [ ] T } = = E A(k 1)e(k 1) + G(k 1)z(k 1) }{{}}{{} a b A T (k 1)e T (k 1) + G T (k 1)z T (k 1) }{{}}{{} c d
22 Kowaraincja błędu predykcji c.d. Kontynuując: P(k k 1) = E {a c} + E {a d} + E {b c} + E {b d} = = A(k 1)E { } e(k 1)e T (k 1) A T (k 1)+ +E {a d} + E {b c} + +G(k 1)E = A(k 1)E +G(k 1)E { } z(k 1)z T (k 1) G T (k 1) = { } e(k 1)e T (k 1) A T (k 1)+ +E {a d} + E {b c} { } z(k 1)z T (k 1) G T (k 1)+
23 Kowaraincja błędu predykcji c.d. Oszacowanie E {a d}: a e(k 1) = e(k 1) [x 0, ˆx 0, z(0),..., z(k 2), v(0),..., v(k 1)] d = z(k 1) (25) z(k{ 1) nie jest skorelowane } z x 0,, ˆx 0, z(0),..., z(k 2) oraz E e(k 1)z T (k 1) = 0, stąd: E {a d} = A(k 1)E Analogicznie E {b c} = 0. A zatem: { } e(k 1)z T (k 1) G T (k 1) = 0 (26) P(k k 1) = A(k 1)P(k 1)A T (k 1)+G(k 1)Z(k 1)G T (k 1) (27)
24 Wyznaczanie wartości macierzy P(k) Wychodząc z definicji macierzy P(k): P(k) = E { } { } e(k)e T (k) = E (x(k) ˆx(k)) (x(k) ˆx(k)) T (28) oraz wykorzystując zależność: ˆx(k) = A(k 1)ˆx(k 1) + K [y(k) C(k)ˆx(k k 1)] +B(k 1)u(k 1) = = ˆx(k k 1) KC(k)ˆx(k k 1) + Ky(k) (29)
25 Wyznaczanie wartości macierzy P(k) c.d. Otrzymano: P(k) = E = E {[ x(k) [I KC(k)] ˆx(k k 1) KC(k)x(k) Kv(k) ] [ ] T } = { [(I KC(k)) e(k k 1) Kv(k)] [ ] T } = { } = E (I KC(k)) e(k k 1)e T (k k 1) (I KC(k)) T + { } +E Kv(k)v T (k)k T = (30) poniważ korelacja pomiedzy z, a v jest równa zero
26 Wyznaczanie wartości macierzy P(k) c.d. Kontynuując: { } P(k) = (I KC(k)) E e(k k 1)e T (k k 1) (I KC(k)) T + { } +KE v(k)v T (k) K T (31) Podsumowując, wartość macierzy P(k) można wyznaczyć z zalezności: P(k) = [I KC(k)] P(k k 1) [I KC(k)] T + KV(k)K T (32) Zauważmy, że P(k) jest funkcją macierzy K stanowiącej nadal wolny stopień swobody!
27 Wyznaczanie wartości macierzy P(k) c.d. Para równań: P(k k 1) = A(k 1)P(k 1)A T (k 1)+G(k 1)Z(k 1)G T (k 1) (33) P(k) = [I KC(k)] P(k k 1) [I KC(k)] T + KV(k)K T (34) stanowi kompletny zestaw pozwalający na wyznaczenie wartości macierzy kowariancji błędu P(k), przy ząłożeniu, że znana jest wartość K
28 Wyznaczanie wartości macierzy P(k) c.d. Do inicjalizacji algorytmu niezbędna jest znajomość: wartości początkowej kowariancji: P(0) = P 0 (35) wartości oczekiwanej stanu początkowego: ˆx(0) = E {x 0 } (36)
29 Optymalizacja P(k) względem K Niech K K + K, wtedy: P(k) = [I (K + K)C(k)] P(k k 1) [I (K + K)C(k)] T + +(K + K)V(k)(K + K) T + [I KC(k)] P(k k 1) [I KC(k)] T + KV(k)K T (37) pomijając wyrażenia drugiego rzędu w odniesieniu do K: P(k) = K [ C(k)P(k k ] 1) (I KC(k)) T + V(k)K T + [ ] + (I KC(k)) P(k k 1)C T (k) + KV(k) K T (38)
30 Optymalizacja P(k) względem K c.d. Przyrost wartości macierzy P(k): odpowiada wartości macierzy K: P(k) = 0 (39) [ 1 K(k) = P(k k 1)C T (k) C(k)P(k k 1)C T (k) + V(k)] (40)
31 Równania rekursywnego filtru Kalmana Kompletny zestaw rownań pozwalający na rekursywną estymację stanu składa się z: P(k k 1) = A(k 1)P(k 1)A T (k 1)+ +G(k 1)Z(k 1)G T (k 1) (41) P(k) = [I KC(k)] P(k k 1) [I KC(k)] T + KV(k)K T (42) [ 1 K(k) = P(k k 1)C T (k) C(k)P(k k 1)C T (k) + V(k)] (43) UWAGA: K(k) nie jest funkcją zależną od obserwacji (pomiarów), a zatem może być wyznaczona odpowiednio wcześniej
32 Podsumowanie k-ty krok estymacji Uaktualnienie równań rekursywango estymatora z chwili k 1 do k: w chwili czasu k 1 znane są: ˆx(k 1) oraz ˆx(k k 1), gdzie: ˆx(k k 1) = A(k 1)ˆx(k 1) + B(k 1)u(k 1) (44) a także P(k 1) oraz P(k k 1) wyznaczone zgodnie z (41) i (42) w oparciu o aktualny pomiar (chwila czasu k) wyznaczana jest bieżąca estymata stanu ˆx(k): ˆx(k) = ˆx(k k 1) + K(k) [y(k) C(k)ˆx(k k 1)] (45) gdzie K(k) wyznaczana jest z (43)
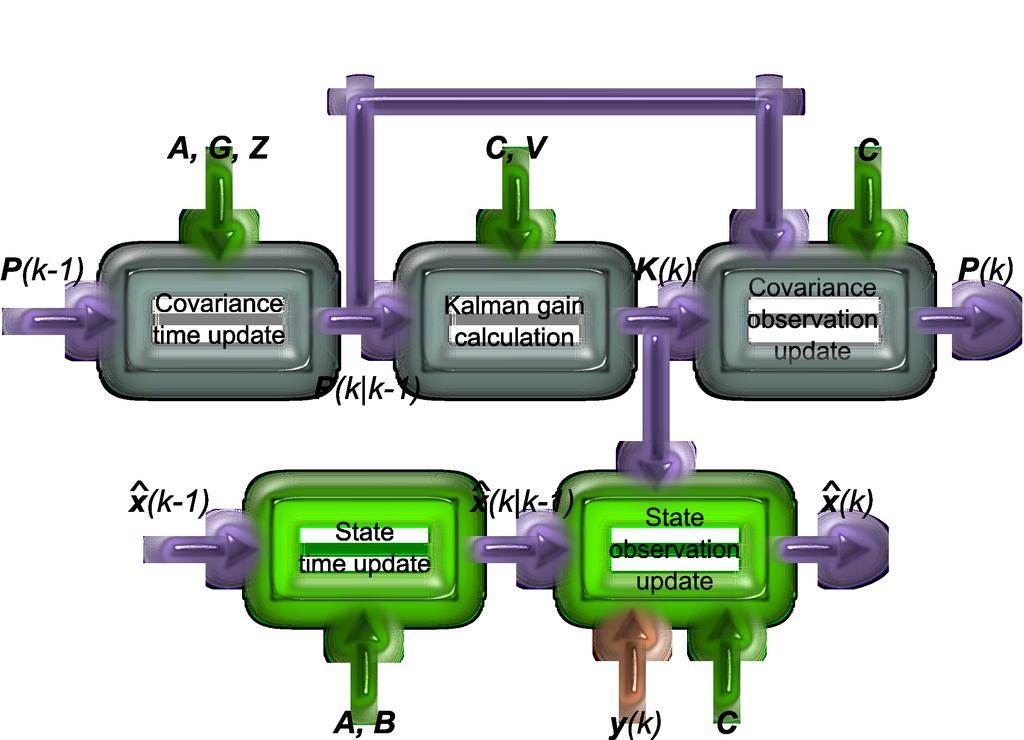

33 Podsumowanie Reprezentacja graficzna
34 Pytania?
Estymacja wektora stanu w prostym układzie elektroenergetycznym
 Zakład Sieci i Systemów Elektroenergetycznych LABORATORIUM INFORMATYCZNE SYSTEMY WSPOMAGANIA DYSPOZYTORÓW Estymacja wektora stanu w prostym układzie elektroenergetycznym Autorzy: dr inż. Zbigniew Zdun
Zakład Sieci i Systemów Elektroenergetycznych LABORATORIUM INFORMATYCZNE SYSTEMY WSPOMAGANIA DYSPOZYTORÓW Estymacja wektora stanu w prostym układzie elektroenergetycznym Autorzy: dr inż. Zbigniew Zdun
Modele zapisane w przestrzeni stanów
 Modele zapisane w przestrzeni stanów Modele Przestrzeni Stanów (State Space Models) sa to modele, w których część parametrów jest nieobserwowalna i losowa. Zachowanie wielowymiarowej zmiennej y t zależy
Modele zapisane w przestrzeni stanów Modele Przestrzeni Stanów (State Space Models) sa to modele, w których część parametrów jest nieobserwowalna i losowa. Zachowanie wielowymiarowej zmiennej y t zależy
Komputerowa Analiza Danych Doświadczalnych
 Komputerowa Analiza Danych Doświadczalnych Prowadząca: dr inż. Hanna Zbroszczyk e-mail: gos@if.pw.edu.pl tel: +48 22 234 58 51 konsultacje: poniedziałek, 10-11; środa: 11-12 www: http://www.if.pw.edu.pl/~gos/students/kadd
Komputerowa Analiza Danych Doświadczalnych Prowadząca: dr inż. Hanna Zbroszczyk e-mail: gos@if.pw.edu.pl tel: +48 22 234 58 51 konsultacje: poniedziałek, 10-11; środa: 11-12 www: http://www.if.pw.edu.pl/~gos/students/kadd
Sterowanie napędów maszyn i robotów
 Wykład 5 - Identyfikacja Instytut Automatyki i Robotyki (IAiR), Politechnika Warszawska Warszawa, 2015 Koncepcje estymacji modelu Standardowe drogi poszukiwania modeli parametrycznych M1: Analityczne określenie
Wykład 5 - Identyfikacja Instytut Automatyki i Robotyki (IAiR), Politechnika Warszawska Warszawa, 2015 Koncepcje estymacji modelu Standardowe drogi poszukiwania modeli parametrycznych M1: Analityczne określenie
Filtr Kalmana. Zaawansowane Techniki Sterowania. Wydział Mechatroniki Politechniki Warszawskiej. Anna Sztyber
 Filtr Kalmana Zaawansowane Techniki Sterowania Wydział Mechatroniki Politechniki Warszawskiej Anna Sztyber ZTS (IAiR PW) Filtr Kalmana Anna Sztyber 1 / 32 Plan wykładu 1 Sformułowanie problemu 2 Niestacjonarny
Filtr Kalmana Zaawansowane Techniki Sterowania Wydział Mechatroniki Politechniki Warszawskiej Anna Sztyber ZTS (IAiR PW) Filtr Kalmana Anna Sztyber 1 / 32 Plan wykładu 1 Sformułowanie problemu 2 Niestacjonarny
1. Podstawowe pojęcia
 1. Podstawowe pojęcia Sterowanie optymalne obiektu polega na znajdowaniu najkorzystniejszej decyzji dotyczącej zamierzonego wpływu na obiekt przy zadanych ograniczeniach. Niech dany jest obiekt opisany
1. Podstawowe pojęcia Sterowanie optymalne obiektu polega na znajdowaniu najkorzystniejszej decyzji dotyczącej zamierzonego wpływu na obiekt przy zadanych ograniczeniach. Niech dany jest obiekt opisany
Stosowana Analiza Regresji
 Stosowana Analiza Regresji Wykład VIII 30 Listopada 2011 1 / 18 gdzie: X : n p Q : n n R : n p Zał.: n p. X = QR, - macierz eksperymentu, - ortogonalna, - ma zera poniżej głównej diagonali. [ R1 X = Q
Stosowana Analiza Regresji Wykład VIII 30 Listopada 2011 1 / 18 gdzie: X : n p Q : n n R : n p Zał.: n p. X = QR, - macierz eksperymentu, - ortogonalna, - ma zera poniżej głównej diagonali. [ R1 X = Q
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Opis systemów dynamicznych w przestrzeni stanu. Wojciech Kurek , Gdańsk
 Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Wpływ częstotliwości taktowania układu FPGA na dokładność estymacji prędkości silnika prądu stałego
 Tomasz BINKOWSKI Politechnika Rzeszowska, Polska Bogdan KWIATKOWSKI Uniwersytet Rzeszowski, Polska Wpływ częstotliwości taktowania układu FPGA na dokładność estymacji prędkości silnika prądu stałego Wstęp
Tomasz BINKOWSKI Politechnika Rzeszowska, Polska Bogdan KWIATKOWSKI Uniwersytet Rzeszowski, Polska Wpływ częstotliwości taktowania układu FPGA na dokładność estymacji prędkości silnika prądu stałego Wstęp
STATYSTYKA MAŁYCH OBSZARÓW II.ESTYMATOR HORVITZA-THOMPSONA, ESTYMATOR KALIBROWANY
 STATYSTYKA MAŁYCH OBSZARÓW II.ESTYMATOR HORVITZA-THOMPSONA, ESTYMATOR KALIBROWANY 2.1 Estymator Horvitza-Thompsona 2.1.1 Estymator Horvitza-Thompsona wartości średniej i globalnej w populacji p-nieobciążony
STATYSTYKA MAŁYCH OBSZARÓW II.ESTYMATOR HORVITZA-THOMPSONA, ESTYMATOR KALIBROWANY 2.1 Estymator Horvitza-Thompsona 2.1.1 Estymator Horvitza-Thompsona wartości średniej i globalnej w populacji p-nieobciążony
Politechnika Gdańska Wydział Elektrotechniki i Automatyki. Automatyka i Robotyka Systemy Sterowania i Wspomagania Decyzji
 Monitorowanie i Diagnostyka w Systemach Sterowania (MiDwSS) Podstawowe sposoby opisu niepewności, wybrane zagadnienia zastosowania estymacji rekursywnej dla potrzeb monitorowania i diagnostyki w systemach
Monitorowanie i Diagnostyka w Systemach Sterowania (MiDwSS) Podstawowe sposoby opisu niepewności, wybrane zagadnienia zastosowania estymacji rekursywnej dla potrzeb monitorowania i diagnostyki w systemach
Zaawansowane metody numeryczne
 Wykład 10 Rozkład LU i rozwiązywanie układów równań liniowych Niech będzie dany układ równań liniowych postaci Ax = b Załóżmy, że istnieją macierze L (trójkątna dolna) i U (trójkątna górna), takie że macierz
Wykład 10 Rozkład LU i rozwiązywanie układów równań liniowych Niech będzie dany układ równań liniowych postaci Ax = b Załóżmy, że istnieją macierze L (trójkątna dolna) i U (trójkątna górna), takie że macierz
Analityczne metody detekcji uszkodzeń
 Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 5 Model procesu Rozważmy czasowo-dyskretny model liniowy gdzie: k dyskretny czas, x(k) R n wektor stanu, x(k + 1) = Ax(k)
Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 5 Model procesu Rozważmy czasowo-dyskretny model liniowy gdzie: k dyskretny czas, x(k) R n wektor stanu, x(k + 1) = Ax(k)
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania MODELOWANIE I IDENTYFIKACJA Studia niestacjonarne Estymacja parametrów modeli, metoda najmniejszych kwadratów.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania MODELOWANIE I IDENTYFIKACJA Studia niestacjonarne Estymacja parametrów modeli, metoda najmniejszych kwadratów.
KADD Metoda najmniejszych kwadratów funkcje nieliniowe
 Metoda najmn. kwadr. - funkcje nieliniowe Metoda najmniejszych kwadratów Funkcje nieliniowe Procedura z redukcją kroku iteracji Przykłady zastosowań Dopasowanie funkcji wykładniczej Dopasowanie funkcji
Metoda najmn. kwadr. - funkcje nieliniowe Metoda najmniejszych kwadratów Funkcje nieliniowe Procedura z redukcją kroku iteracji Przykłady zastosowań Dopasowanie funkcji wykładniczej Dopasowanie funkcji
Obserwatory stanu, zasada separowalności i regulator LQG
 Obserwatory stanu, zasada separowalności i regulator LQG Zaawansowane Techniki Sterowania Wydział Mechatroniki Politechniki Warszawskiej Anna Sztyber ZTS (IAiR PW) LQR Anna Sztyber / 29 Plan wykładu Obserwatory
Obserwatory stanu, zasada separowalności i regulator LQG Zaawansowane Techniki Sterowania Wydział Mechatroniki Politechniki Warszawskiej Anna Sztyber ZTS (IAiR PW) LQR Anna Sztyber / 29 Plan wykładu Obserwatory
Zaawansowane metody numeryczne
 Wykład 11 Ogólna postać metody iteracyjnej Definicja 11.1. (metoda iteracyjna rozwiązywania układów równań) Metodą iteracyjną rozwiązywania { układów równań liniowych nazywamy ciąg wektorów zdefiniowany
Wykład 11 Ogólna postać metody iteracyjnej Definicja 11.1. (metoda iteracyjna rozwiązywania układów równań) Metodą iteracyjną rozwiązywania { układów równań liniowych nazywamy ciąg wektorów zdefiniowany
Prawdopodobieństwo i statystyka
 Wykład XV: Zagadnienia redukcji wymiaru danych 2 lutego 2015 r. Standaryzacja danych Standaryzacja danych Własności macierzy korelacji Definicja Niech X będzie zmienną losową o skończonym drugim momencie.
Wykład XV: Zagadnienia redukcji wymiaru danych 2 lutego 2015 r. Standaryzacja danych Standaryzacja danych Własności macierzy korelacji Definicja Niech X będzie zmienną losową o skończonym drugim momencie.
Rozwiazywanie układów równań liniowych. Ax = b
 Rozwiazywanie układów równań liniowych Ax = b 1 PLAN REFERATU: Warunki istnienia rozwiazań układu Metoda najmniejszych kwadratów Metoda najmniejszych kwadratów - algorytm rekurencyjny Rozwiazanie układu
Rozwiazywanie układów równań liniowych Ax = b 1 PLAN REFERATU: Warunki istnienia rozwiazań układu Metoda najmniejszych kwadratów Metoda najmniejszych kwadratów - algorytm rekurencyjny Rozwiazanie układu
PODSTAWY AUTOMATYKI. MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
Stanisław Cichocki Natalia Nehrebecka. Zajęcia 8
 Stanisław Cichocki Natalia Nehrebecka Zajęcia 8 1. Testy diagnostyczne 2. Testowanie prawidłowości formy funkcyjnej modelu 3. Testowanie normalności składników losowych 4. Testowanie stabilności parametrów
Stanisław Cichocki Natalia Nehrebecka Zajęcia 8 1. Testy diagnostyczne 2. Testowanie prawidłowości formy funkcyjnej modelu 3. Testowanie normalności składników losowych 4. Testowanie stabilności parametrów
Statystyka i eksploracja danych
 Wykład XII: Zagadnienia redukcji wymiaru danych 12 maja 2014 Definicja Niech X będzie zmienną losową o skończonym drugim momencie. Standaryzacją zmiennej X nazywamy zmienną losową Z = X EX Var (X ). Definicja
Wykład XII: Zagadnienia redukcji wymiaru danych 12 maja 2014 Definicja Niech X będzie zmienną losową o skończonym drugim momencie. Standaryzacją zmiennej X nazywamy zmienną losową Z = X EX Var (X ). Definicja
Wykład z równań różnicowych
 Wykład z równań różnicowych 1 Wiadomości wstępne Umówmy się, że na czas tego wykładu zrezygnujemy z oznaczania n-tego wyrazu ciągu symbolem typu x n, y n itp. Zamiast tego pisać będziemy x (n), y (n) itp.
Wykład z równań różnicowych 1 Wiadomości wstępne Umówmy się, że na czas tego wykładu zrezygnujemy z oznaczania n-tego wyrazu ciągu symbolem typu x n, y n itp. Zamiast tego pisać będziemy x (n), y (n) itp.
Fuzja sygnałów i filtry bayesowskie
 Fuzja sygnałów i filtry bayesowskie Roboty Manipulacyjne i Mobilne dr inż. Janusz Jakubiak Katedra Cybernetyki i Robotyki Wydział Elektroniki, Politechnika Wrocławska Wrocław, 10.03.2015 Dlaczego potrzebna
Fuzja sygnałów i filtry bayesowskie Roboty Manipulacyjne i Mobilne dr inż. Janusz Jakubiak Katedra Cybernetyki i Robotyki Wydział Elektroniki, Politechnika Wrocławska Wrocław, 10.03.2015 Dlaczego potrzebna
Wprowadzenie do teorii ekonometrii. Wykład 1 Warunkowa wartość oczekiwana i odwzorowanie liniowe
 Wprowadzenie do teorii ekonometrii Wykład 1 Warunkowa wartość oczekiwana i odwzorowanie liniowe Zajęcia Wykład Laboratorium komputerowe 2 Zaliczenie EGZAMIN (50%) Na egzaminie obowiązują wszystkie informacje
Wprowadzenie do teorii ekonometrii Wykład 1 Warunkowa wartość oczekiwana i odwzorowanie liniowe Zajęcia Wykład Laboratorium komputerowe 2 Zaliczenie EGZAMIN (50%) Na egzaminie obowiązują wszystkie informacje
ZAJĘCIA II. Zmienne losowe, sygnały stochastyczne, zakłócenia pomiarowe
 ZAJĘCIA II Zmienne losowe, sygnały stochastyczne, zakłócenia pomiarowe Po co statystyka w identyfikacji? Zmienne losowe i ich parametry Korelacja zmiennych losowych Rozkłady wielowymiarowe i sygnały stochastyczne
ZAJĘCIA II Zmienne losowe, sygnały stochastyczne, zakłócenia pomiarowe Po co statystyka w identyfikacji? Zmienne losowe i ich parametry Korelacja zmiennych losowych Rozkłady wielowymiarowe i sygnały stochastyczne
Regresja wieloraka Ogólny problem obliczeniowy: dopasowanie linii prostej do zbioru punktów. Najprostszy przypadek - jedna zmienna zależna i jedna
 Regresja wieloraka Regresja wieloraka Ogólny problem obliczeniowy: dopasowanie linii prostej do zbioru punktów. Najprostszy przypadek - jedna zmienna zależna i jedna zmienna niezależna (można zobrazować
Regresja wieloraka Regresja wieloraka Ogólny problem obliczeniowy: dopasowanie linii prostej do zbioru punktów. Najprostszy przypadek - jedna zmienna zależna i jedna zmienna niezależna (można zobrazować
Promotor: dr Marek Pawełczyk. Marcin Picz
 Promotor: dr Marek Pawełczyk Marcin Picz Stosowane metody: - Grupa metod odejmowania widm (subtractive( subtractive-typetype algorithms); - Filtracja Wienera; - Neural networks & Fuzzy logic (sieci neuronowe
Promotor: dr Marek Pawełczyk Marcin Picz Stosowane metody: - Grupa metod odejmowania widm (subtractive( subtractive-typetype algorithms); - Filtracja Wienera; - Neural networks & Fuzzy logic (sieci neuronowe
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Metoda największej wiarygodności
 Metoda największej wiarygodności Próbki w obecności tła Funkcja wiarygodności Iloraz wiarygodności Pomiary o różnej dokładności Obciążenie Informacja z próby i nierówność informacyjna Wariancja minimalna
Metoda największej wiarygodności Próbki w obecności tła Funkcja wiarygodności Iloraz wiarygodności Pomiary o różnej dokładności Obciążenie Informacja z próby i nierówność informacyjna Wariancja minimalna
KADD Minimalizacja funkcji
 Minimalizacja funkcji Poszukiwanie minimum funkcji Foma kwadratowa Metody przybliżania minimum minimalizacja Minimalizacja w n wymiarach Metody poszukiwania minimum Otaczanie minimum Podział obszaru zawierającego
Minimalizacja funkcji Poszukiwanie minimum funkcji Foma kwadratowa Metody przybliżania minimum minimalizacja Minimalizacja w n wymiarach Metody poszukiwania minimum Otaczanie minimum Podział obszaru zawierającego
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metody kierunków poparwy (metoda Newtona-Raphsona, metoda gradientów sprzężonych) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.03.2019 1
Optymalizacja ciągła 5. Metody kierunków poparwy (metoda Newtona-Raphsona, metoda gradientów sprzężonych) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.03.2019 1
Porównanie błędu predykcji dla różnych metod estymacji współczynników w modelu liniowym, scenariusz p bliskie lub większe od n
 Porównanie błędu predykcji dla różnych metod estymacji współczynników w modelu iowym, scenariusz p bliskie lub większe od n Przemyslaw.Biecek@gmail.com, MIM Uniwersytet Warszawski Plan prezentacji: 1 Motywacja;
Porównanie błędu predykcji dla różnych metod estymacji współczynników w modelu iowym, scenariusz p bliskie lub większe od n Przemyslaw.Biecek@gmail.com, MIM Uniwersytet Warszawski Plan prezentacji: 1 Motywacja;
Ekonometria. Prognozowanie ekonometryczne, ocena stabilności oszacowań parametrów strukturalnych. Jakub Mućk. Katedra Ekonomii Ilościowej
 Ekonometria Prognozowanie ekonometryczne, ocena stabilności oszacowań parametrów strukturalnych Jakub Mućk Katedra Ekonomii Ilościowej Jakub Mućk Ekonometria Wykład 4 Prognozowanie, stabilność 1 / 17 Agenda
Ekonometria Prognozowanie ekonometryczne, ocena stabilności oszacowań parametrów strukturalnych Jakub Mućk Katedra Ekonomii Ilościowej Jakub Mućk Ekonometria Wykład 4 Prognozowanie, stabilność 1 / 17 Agenda
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
WYKŁAD 9 METODY ZMIENNEJ METRYKI
 WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
Wykład z równań różnicowych
 Wykład z równań różnicowych Umówmy się, że na czas tego wykładu zrezygnujemy z oznaczania n-tego wyrazu ciągu symbolem typu x n, y n itp. Zamiast tego pisać będziemy x (n), y (n) itp. Definicja 1. Operatorem
Wykład z równań różnicowych Umówmy się, że na czas tego wykładu zrezygnujemy z oznaczania n-tego wyrazu ciągu symbolem typu x n, y n itp. Zamiast tego pisać będziemy x (n), y (n) itp. Definicja 1. Operatorem
Stabilność II Metody Lapunowa badania stabilności
 Metody Lapunowa badania stabilności Interesuje nas w sposób szczególny system: Wprowadzamy dla niego pojęcia: - stabilności wewnętrznej - odnosi się do zachowania się systemu przy zerowym wejściu, czyli
Metody Lapunowa badania stabilności Interesuje nas w sposób szczególny system: Wprowadzamy dla niego pojęcia: - stabilności wewnętrznej - odnosi się do zachowania się systemu przy zerowym wejściu, czyli
#09. Systemy o złożonej strukturze
 #09 Systemy o złożonej strukturze system składa się z wielu elementów, obiekty (podsystemy) wchodzące w skład systemu są ze sobą połączone i wzajemnie od siebie zależne mogą wystąpić ograniczenia w dostępności
#09 Systemy o złożonej strukturze system składa się z wielu elementów, obiekty (podsystemy) wchodzące w skład systemu są ze sobą połączone i wzajemnie od siebie zależne mogą wystąpić ograniczenia w dostępności
5. Rozwiązywanie układów równań liniowych
 5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
[d(i) y(i)] 2. Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) i=1. λ n i [d(i) y(i)] 2 λ (0, 1]
![[d(i) y(i)] 2. Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) i=1. λ n i [d(i) y(i)] 2 λ (0, 1]](/thumbs/72/67682252.jpg "[d(i) y(i)] 2. Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) i=1. λ n i [d(i) y(i)] 2 λ (0, 1]") Algorytm RLS Recursive Least Squares Ogólna postać kryterium LS: J = i e 2 (i) = i [d(i) y(i)] 2 Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) Zmodyfikowane kryterium
Algorytm RLS Recursive Least Squares Ogólna postać kryterium LS: J = i e 2 (i) = i [d(i) y(i)] 2 Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) Zmodyfikowane kryterium
STATYSTYKA MAŁYCH OBSZARÓW I. WPROWADZENIE
 1 STATYSTYKA MAŁYCH OBSZARÓW I. WPROWADZENIE 1.1 Podejścia w statystyce małych obszarów Randomizacyjne Wektor wartości badanej cechy traktowany jest jako nielosowy. Szacowana charakterystyka jest nielosowa
1 STATYSTYKA MAŁYCH OBSZARÓW I. WPROWADZENIE 1.1 Podejścia w statystyce małych obszarów Randomizacyjne Wektor wartości badanej cechy traktowany jest jako nielosowy. Szacowana charakterystyka jest nielosowa
Ważne rozkłady i twierdzenia c.d.
 Ważne rozkłady i twierdzenia c.d. Funkcja charakterystyczna rozkładu Wielowymiarowy rozkład normalny Elipsa kowariacji Sploty rozkładów Rozkłady jednostajne Sploty z rozkładem normalnym Pobieranie próby
Ważne rozkłady i twierdzenia c.d. Funkcja charakterystyczna rozkładu Wielowymiarowy rozkład normalny Elipsa kowariacji Sploty rozkładów Rozkłady jednostajne Sploty z rozkładem normalnym Pobieranie próby
Statystyka opisowa. Wykład V. Regresja liniowa wieloraka
 Statystyka opisowa. Wykład V. e-mail:e.kozlovski@pollub.pl Spis treści 1 Prosta regresji cechy Y względem cech X 1,..., X k. 2 3 Wyznaczamy zależność cechy Y od cech X 1, X 2,..., X k postaci Y = α 0 +
Statystyka opisowa. Wykład V. e-mail:e.kozlovski@pollub.pl Spis treści 1 Prosta regresji cechy Y względem cech X 1,..., X k. 2 3 Wyznaczamy zależność cechy Y od cech X 1, X 2,..., X k postaci Y = α 0 +
Obliczenia naukowe Wykład nr 8
 Obliczenia naukowe Wykład nr 8 Paweł Zieliński Katedra Informatyki, Wydział Podstawowych Problemów Techniki, Politechnika Wrocławska Literatura Literatura podstawowa [] D. Kincaid, W. Cheney, Analiza numeryczna,
Obliczenia naukowe Wykład nr 8 Paweł Zieliński Katedra Informatyki, Wydział Podstawowych Problemów Techniki, Politechnika Wrocławska Literatura Literatura podstawowa [] D. Kincaid, W. Cheney, Analiza numeryczna,
Baza w jądrze i baza obrazu ( )
") Przykład Baza w jądrze i baza obrazu (839) Znajdź bazy jądra i obrazu odwzorowania α : R 4 R 3, gdzie α(x, y, z, t) = (x + 2z + t, 2x + y 3z 5t, x y + z + 4t) () zór ten oznacza, że α jest odwzorowaniem
Przykład Baza w jądrze i baza obrazu (839) Znajdź bazy jądra i obrazu odwzorowania α : R 4 R 3, gdzie α(x, y, z, t) = (x + 2z + t, 2x + y 3z 5t, x y + z + 4t) () zór ten oznacza, że α jest odwzorowaniem
Aproksymacja funkcji a regresja symboliczna
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Rozdział 8. Regresja. Definiowanie modelu
 Rozdział 8 Regresja Definiowanie modelu Analizę korelacji można traktować jako wstęp do analizy regresji. Jeżeli wykresy rozrzutu oraz wartości współczynników korelacji wskazują na istniejąca współzmienność
Rozdział 8 Regresja Definiowanie modelu Analizę korelacji można traktować jako wstęp do analizy regresji. Jeżeli wykresy rozrzutu oraz wartości współczynników korelacji wskazują na istniejąca współzmienność
Stanisław Cichocki. Natalia Nehrebecka
 Stanisław Cichocki Natalia Nehrebecka 1 2 3 1. Wprowadzenie do danych panelowych a) Charakterystyka danych panelowych b) Zalety i ograniczenia 2. Modele ekonometryczne danych panelowych a) Model efektów
Stanisław Cichocki Natalia Nehrebecka 1 2 3 1. Wprowadzenie do danych panelowych a) Charakterystyka danych panelowych b) Zalety i ograniczenia 2. Modele ekonometryczne danych panelowych a) Model efektów
Własności statystyczne regresji liniowej. Wykład 4
 Własności statystyczne regresji liniowej Wykład 4 Plan Własności zmiennych losowych Normalna regresja liniowa Własności regresji liniowej Literatura B. Hansen (2017+) Econometrics, Rozdział 5 Własności
Własności statystyczne regresji liniowej Wykład 4 Plan Własności zmiennych losowych Normalna regresja liniowa Własności regresji liniowej Literatura B. Hansen (2017+) Econometrics, Rozdział 5 Własności
Prawdopodobieństwo i statystyka
 Wykład XIII: Prognoza. 26 stycznia 2015 Wykład XIII: Prognoza. Prognoza (predykcja) Przypuśćmy, że mamy dany ciąg liczb x 1, x 2,..., x n, stanowiących wyniki pomiaru pewnej zmiennej w czasie wielkości
Wykład XIII: Prognoza. 26 stycznia 2015 Wykład XIII: Prognoza. Prognoza (predykcja) Przypuśćmy, że mamy dany ciąg liczb x 1, x 2,..., x n, stanowiących wyniki pomiaru pewnej zmiennej w czasie wielkości
Algorytmy estymacji stanu (filtry)
") Algorytmy estymacji stanu (filtry) Na podstawie: AIMA ch15, Udacity (S. Thrun) Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 21 kwietnia 2014 Problem lokalizacji Obserwowalność? Determinizm?
Algorytmy estymacji stanu (filtry) Na podstawie: AIMA ch15, Udacity (S. Thrun) Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 21 kwietnia 2014 Problem lokalizacji Obserwowalność? Determinizm?
Metody Optymalizacji Laboratorium nr 4 Metoda najmniejszych kwadratów
 Laboratorium Metod Optymalizacji 216 Metody Optymalizacji Laboratorium nr 4 Metoda najmniejszych kwadratów 1. Za pomocą funkcji lsqcurvefit dobrać parametry a i b funkcji: Posiadając następujące dane pomiarowe:
Laboratorium Metod Optymalizacji 216 Metody Optymalizacji Laboratorium nr 4 Metoda najmniejszych kwadratów 1. Za pomocą funkcji lsqcurvefit dobrać parametry a i b funkcji: Posiadając następujące dane pomiarowe:
7. Estymacja parametrów w modelu normalnym(14.04.2008) Pojęcie losowej próby prostej
 Pojęcie losowej próby prostej") 7. Estymacja parametrów w modelu normalnym(14.04.2008) Pojęcie losowej próby prostej Definicja 1 n-elementowa losowa próba prosta nazywamy ciag n niezależnych zmiennych losowych o jednakowych rozkładach
7. Estymacja parametrów w modelu normalnym(14.04.2008) Pojęcie losowej próby prostej Definicja 1 n-elementowa losowa próba prosta nazywamy ciag n niezależnych zmiennych losowych o jednakowych rozkładach
3. Macierze i Układy Równań Liniowych
 3. Macierze i Układy Równań Liniowych Rozważamy równanie macierzowe z końcówki ostatniego wykładu ( ) 3 1 X = 4 1 ( ) 2 5 Podstawiając X = ( ) x y i wymnażając, otrzymujemy układ 2 równań liniowych 3x
3. Macierze i Układy Równań Liniowych Rozważamy równanie macierzowe z końcówki ostatniego wykładu ( ) 3 1 X = 4 1 ( ) 2 5 Podstawiając X = ( ) x y i wymnażając, otrzymujemy układ 2 równań liniowych 3x
Metoda reprezentacyjna
 Metoda reprezentacyjna Stanisław Jaworski Katedra Ekonometrii i Statystyki Zakład Statystyki Populacja, cecha, parametr, próba Metoda reprezentacyjna Przedmiotem rozważań metody reprezentacyjnej są metody
Metoda reprezentacyjna Stanisław Jaworski Katedra Ekonometrii i Statystyki Zakład Statystyki Populacja, cecha, parametr, próba Metoda reprezentacyjna Przedmiotem rozważań metody reprezentacyjnej są metody
ESTYMACJA BŁĘDU PREDYKCJI I JEJ ZASTOSOWANIA
 ESTYMACJA BŁĘDU PREDYKCJI I JEJ ZASTOSOWANIA Jan Mielniczuk Wisła, grudzień 2009 PLAN Błędy predykcji i ich podstawowe estymatory Estymacja błędu predykcji w modelu liniowym. Funkcje kryterialne Własności
ESTYMACJA BŁĘDU PREDYKCJI I JEJ ZASTOSOWANIA Jan Mielniczuk Wisła, grudzień 2009 PLAN Błędy predykcji i ich podstawowe estymatory Estymacja błędu predykcji w modelu liniowym. Funkcje kryterialne Własności
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Metody optymalizacji Metody poszukiwania ekstremum funkcji jednej zmiennej Materiały pomocnicze do ćwiczeń
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Metody optymalizacji Metody poszukiwania ekstremum funkcji jednej zmiennej Materiały pomocnicze do ćwiczeń
Ekonometria. Wprowadzenie do modelowania ekonometrycznego Estymator KMNK. Jakub Mućk. Katedra Ekonomii Ilościowej
 Ekonometria Wprowadzenie do modelowania ekonometrycznego Estymator Jakub Mućk Katedra Ekonomii Ilościowej Jakub Mućk Ekonometria Wykład 1 Estymator 1 / 16 Agenda 1 Literatura Zaliczenie przedmiotu 2 Model
Ekonometria Wprowadzenie do modelowania ekonometrycznego Estymator Jakub Mućk Katedra Ekonomii Ilościowej Jakub Mućk Ekonometria Wykład 1 Estymator 1 / 16 Agenda 1 Literatura Zaliczenie przedmiotu 2 Model
Systemy Sterowania i Wspomagania Decyzji Wykład 2
 Systemy Sterowania i Wspomagania Decyzji mgr inż. Grzegorz Ewald y Politechnika Gdańska, Wydział Elektrotechniki i Automatyki 2011-02-23, Gdańsk System o dynamice zdarzeniowej (ang. Discrete Event System
Systemy Sterowania i Wspomagania Decyzji mgr inż. Grzegorz Ewald y Politechnika Gdańska, Wydział Elektrotechniki i Automatyki 2011-02-23, Gdańsk System o dynamice zdarzeniowej (ang. Discrete Event System
INTERPOLACJA I APROKSYMACJA FUNKCJI
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Regresja nieparametryczna series estimator
 Regresja nieparametryczna series estimator 1 Literatura Bruce Hansen (2018) Econometrics, rozdział 18 2 Regresja nieparametryczna Dwie główne metody estymacji Estymatory jądrowe Series estimators (estymatory
Regresja nieparametryczna series estimator 1 Literatura Bruce Hansen (2018) Econometrics, rozdział 18 2 Regresja nieparametryczna Dwie główne metody estymacji Estymatory jądrowe Series estimators (estymatory
Układy równań liniowych. Ax = b (1)
") Układy równań liniowych Dany jest układ m równań z n niewiadomymi. Liczba równań m nie musi być równa liczbie niewiadomych n, tj. mn. a a... a b n n a a... a b n n... a a... a b m m mn n m
Układy równań liniowych Dany jest układ m równań z n niewiadomymi. Liczba równań m nie musi być równa liczbie niewiadomych n, tj. mn. a a... a b n n a a... a b n n... a a... a b m m mn n m
Przekształcenia liniowe
 Przekształcenia liniowe Zadania Które z następujących przekształceń są liniowe? (a) T : R 2 R 2, T (x, x 2 ) = (2x, x x 2 ), (b) T : R 2 R 2, T (x, x 2 ) = (x + 3x 2, x 2 ), (c) T : R 2 R, T (x, x 2 )
Przekształcenia liniowe Zadania Które z następujących przekształceń są liniowe? (a) T : R 2 R 2, T (x, x 2 ) = (2x, x x 2 ), (b) T : R 2 R 2, T (x, x 2 ) = (x + 3x 2, x 2 ), (c) T : R 2 R, T (x, x 2 )
Wykład 10 Skalowanie wielowymiarowe
 Wykład 10 Skalowanie wielowymiarowe Wrocław, 30.05.2018r Skalowanie wielowymiarowe (Multidimensional Scaling (MDS)) Główne cele MDS: przedstawienie struktury badanych obiektów przez określenie treści wymiarów
Wykład 10 Skalowanie wielowymiarowe Wrocław, 30.05.2018r Skalowanie wielowymiarowe (Multidimensional Scaling (MDS)) Główne cele MDS: przedstawienie struktury badanych obiektów przez określenie treści wymiarów
STATYSTYKA MAŁYCH OBSZARÓW IV. EMPIRYCZNY NAJLEPSZY PREDYKTOR
 1 STATYSTYKA MAŁYCH OBSZARÓW IV. EMPIRYCZNY NAJLEPSZY PREDYKTOR 3.1 Najlepszy predyktor i empiryczny najlepszy predyktor 3.1.1 Najlepszy predyktor i empiryczny najlepszy predyktor Ogólny mieszany model
1 STATYSTYKA MAŁYCH OBSZARÓW IV. EMPIRYCZNY NAJLEPSZY PREDYKTOR 3.1 Najlepszy predyktor i empiryczny najlepszy predyktor 3.1.1 Najlepszy predyktor i empiryczny najlepszy predyktor Ogólny mieszany model
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Kwantyzacja wektorowa. Kodowanie różnicowe.
 Kwantyzacja wektorowa. Kodowanie różnicowe. Kodowanie i kompresja informacji - Wykład 7 12 kwietnia 2010 Kwantyzacja wektorowa wprowadzenie Zamiast kwantyzować pojedyncze elementy kwantyzujemy całe bloki
Kwantyzacja wektorowa. Kodowanie różnicowe. Kodowanie i kompresja informacji - Wykład 7 12 kwietnia 2010 Kwantyzacja wektorowa wprowadzenie Zamiast kwantyzować pojedyncze elementy kwantyzujemy całe bloki
Testowanie hipotez statystycznych.
 Statystyka Wykład 10 Wrocław, 22 grudnia 2011 Testowanie hipotez statystycznych Definicja. Hipotezą statystyczną nazywamy stwierdzenie dotyczące parametrów populacji. Definicja. Dwie komplementarne w problemie
Statystyka Wykład 10 Wrocław, 22 grudnia 2011 Testowanie hipotez statystycznych Definicja. Hipotezą statystyczną nazywamy stwierdzenie dotyczące parametrów populacji. Definicja. Dwie komplementarne w problemie
Wykład 5 Estymatory nieobciążone z jednostajnie minimalną war
 Wykład 5 Estymatory nieobciążone z jednostajnie minimalną wariancją Wrocław, 25 października 2017r Statystyki próbkowe - Przypomnienie Niech X = (X 1, X 2,... X n ) będzie n elementowym wektorem losowym.
Wykład 5 Estymatory nieobciążone z jednostajnie minimalną wariancją Wrocław, 25 października 2017r Statystyki próbkowe - Przypomnienie Niech X = (X 1, X 2,... X n ) będzie n elementowym wektorem losowym.
6. Identyfikacja wielowymiarowych systemów statycznych metodanajmniejszychkwadratów
 6. Identyfikacja wielowymiarowych systemów statycznych metodanajmniejszychkwadratów . Przedmiot identyfikacji System () x (2) x * a z y ( s ) x y = F (x,z)=f(x,z,a ),gdziex = F () znane, a nieznane x ()
6. Identyfikacja wielowymiarowych systemów statycznych metodanajmniejszychkwadratów . Przedmiot identyfikacji System () x (2) x * a z y ( s ) x y = F (x,z)=f(x,z,a ),gdziex = F () znane, a nieznane x ()
13 Układy równań liniowych
 13 Układy równań liniowych Definicja 13.1 Niech m, n N. Układem równań liniowych nad ciałem F m równaniach i n niewiadomych x 1, x 2,..., x n nazywamy koniunkcję równań postaci a 11 x 1 + a 12 x 2 +...
13 Układy równań liniowych Definicja 13.1 Niech m, n N. Układem równań liniowych nad ciałem F m równaniach i n niewiadomych x 1, x 2,..., x n nazywamy koniunkcję równań postaci a 11 x 1 + a 12 x 2 +...
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać układu równań liniowych Układ liniowych równań algebraicznych
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać układu równań liniowych Układ liniowych równań algebraicznych
Programowanie liniowe
 Badania operacyjne Problem Model matematyczny Metoda rozwiązania Znaleźć optymalny program produkcji. Zmaksymalizować 1 +3 2 2 3 (1) Przy ograniczeniach 3 1 2 +2 3 7 (2) 2 1 +4 2 12 (3) 4 1 +3 2 +8 3 10
Badania operacyjne Problem Model matematyczny Metoda rozwiązania Znaleźć optymalny program produkcji. Zmaksymalizować 1 +3 2 2 3 (1) Przy ograniczeniach 3 1 2 +2 3 7 (2) 2 1 +4 2 12 (3) 4 1 +3 2 +8 3 10
Funkcje wymierne. Funkcja homograficzna. Równania i nierówności wymierne.
 Funkcje wymierne. Funkcja homograficzna. Równania i nierówności wymierne. Funkcja homograficzna. Definicja. Funkcja homograficzna jest to funkcja określona wzorem f() = a + b c + d, () gdzie współczynniki
Funkcje wymierne. Funkcja homograficzna. Równania i nierówności wymierne. Funkcja homograficzna. Definicja. Funkcja homograficzna jest to funkcja określona wzorem f() = a + b c + d, () gdzie współczynniki
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Praca dyplomowa magisterska
 Praca dyplomowa magisterska Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie CUDA Dyplomant: Jakub Kołakowski Opiekun pracy: dr inż. Michał Meller Plan prezentacji
Praca dyplomowa magisterska Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie CUDA Dyplomant: Jakub Kołakowski Opiekun pracy: dr inż. Michał Meller Plan prezentacji
Filtracja pomiarów z głowic laserowych
 dr inż. st. of. Paweł Zalewsi Filtracja pomiarów z głowic laserowych słowa luczowe: filtracja pomiaru odległości, PNDS Założenia filtracji pomiaru odległości. Problem wyznaczenia odległości i parametrów
dr inż. st. of. Paweł Zalewsi Filtracja pomiarów z głowic laserowych słowa luczowe: filtracja pomiaru odległości, PNDS Założenia filtracji pomiaru odległości. Problem wyznaczenia odległości i parametrów
Zrównoleglona optymalizacja stochastyczna na dużych zbiorach danych
 Zrównoleglona optymalizacja stochastyczna na dużych zbiorach danych mgr inż. C. Dendek prof. nzw. dr hab. J. Mańdziuk Politechnika Warszawska, Wydział Matematyki i Nauk Informacyjnych Outline 1 Uczenie
Zrównoleglona optymalizacja stochastyczna na dużych zbiorach danych mgr inż. C. Dendek prof. nzw. dr hab. J. Mańdziuk Politechnika Warszawska, Wydział Matematyki i Nauk Informacyjnych Outline 1 Uczenie
Zależność. przyczynowo-skutkowa, symptomatyczna, pozorna (iluzoryczna),
,") Zależność przyczynowo-skutkowa, symptomatyczna, pozorna (iluzoryczna), funkcyjna stochastyczna Korelacja brak korelacji korelacja krzywoliniowa korelacja dodatnia korelacja ujemna Szereg korelacyjny numer
Zależność przyczynowo-skutkowa, symptomatyczna, pozorna (iluzoryczna), funkcyjna stochastyczna Korelacja brak korelacji korelacja krzywoliniowa korelacja dodatnia korelacja ujemna Szereg korelacyjny numer
Programowanie liniowe
 Programowanie liniowe Maciej Drwal maciej.drwal@pwr.wroc.pl 1 Problem programowania liniowego min x c T x (1) Ax b, (2) x 0. (3) gdzie A R m n, c R n, b R m. Oznaczmy przez x rozwiązanie optymalne, tzn.
Programowanie liniowe Maciej Drwal maciej.drwal@pwr.wroc.pl 1 Problem programowania liniowego min x c T x (1) Ax b, (2) x 0. (3) gdzie A R m n, c R n, b R m. Oznaczmy przez x rozwiązanie optymalne, tzn.
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
Sterowanie napędów maszyn i robotów
 Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Matematyka z el. statystyki, # 6 /Geodezja i kartografia II/
 Matematyka z el. statystyki, # 6 /Geodezja i kartografia II/ Uniwersytet Przyrodniczy w Lublinie Katedra Zastosowań Matematyki i Informatyki ul. Głęboka 28, bud. CIW, p. 221 e-mail: zdzislaw.otachel@up.lublin.pl
Matematyka z el. statystyki, # 6 /Geodezja i kartografia II/ Uniwersytet Przyrodniczy w Lublinie Katedra Zastosowań Matematyki i Informatyki ul. Głęboka 28, bud. CIW, p. 221 e-mail: zdzislaw.otachel@up.lublin.pl
Wykład 3 Równania rózniczkowe cd
 7 grudnia 2010 Definicja Równanie różniczkowe dy dx + p (x) y = q (x) (1) nazywamy równaniem różniczkowym liniowym pierwszego rzędu. Jeśli q (x) 0, to równanie (1) czyli równanie dy dx + p (x) y = 0 nazywamy
7 grudnia 2010 Definicja Równanie różniczkowe dy dx + p (x) y = q (x) (1) nazywamy równaniem różniczkowym liniowym pierwszego rzędu. Jeśli q (x) 0, to równanie (1) czyli równanie dy dx + p (x) y = 0 nazywamy
Regulator liniowo kwadratowy na przykładzie wahadła odwróconego
 Regulator liniowo kwadratowy na przykładzie wahadła odwróconego kwiecień 2012 Sterowanie Teoria Przykład wahadła na wózku Dany jest system dynamiczny postaci: ẋ = f (x, u) (1) y = h(x) (2) Naszym zadaniem
Regulator liniowo kwadratowy na przykładzie wahadła odwróconego kwiecień 2012 Sterowanie Teoria Przykład wahadła na wózku Dany jest system dynamiczny postaci: ẋ = f (x, u) (1) y = h(x) (2) Naszym zadaniem
Uczenie sieci typu MLP
 Uczenie sieci typu MLP Przypomnienie budowa sieci typu MLP Przypomnienie budowy neuronu Neuron ze skokową funkcją aktywacji jest zły!!! Powszechnie stosuje -> modele z sigmoidalną funkcją aktywacji - współczynnik
Uczenie sieci typu MLP Przypomnienie budowa sieci typu MLP Przypomnienie budowy neuronu Neuron ze skokową funkcją aktywacji jest zły!!! Powszechnie stosuje -> modele z sigmoidalną funkcją aktywacji - współczynnik
Zestaw 12- Macierz odwrotna, układy równań liniowych
 Zestaw - Macierz odwrotna, układy równań liniowych Przykładowe zadania z rozwiązaniami Załóżmy, że macierz jest macierzą kwadratową stopnia n. Mówimy, że macierz tego samego wymiaru jest macierzą odwrotną
Zestaw - Macierz odwrotna, układy równań liniowych Przykładowe zadania z rozwiązaniami Załóżmy, że macierz jest macierzą kwadratową stopnia n. Mówimy, że macierz tego samego wymiaru jest macierzą odwrotną
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
WNIOSKOWANIE W MODELU REGRESJI LINIOWEJ
 WNIOSKOWANIE W MODELU REGRESJI LINIOWEJ Dana jest populacja generalna, w której dwuwymiarowa cecha (zmienna losowa) (X, Y ) ma pewien dwuwymiarowy rozk lad. Miara korelacji liniowej dla zmiennych (X, Y
WNIOSKOWANIE W MODELU REGRESJI LINIOWEJ Dana jest populacja generalna, w której dwuwymiarowa cecha (zmienna losowa) (X, Y ) ma pewien dwuwymiarowy rozk lad. Miara korelacji liniowej dla zmiennych (X, Y
WYMAGANIA WSTĘPNE W ZAKRESIE WIEDZY, UMIEJĘTNOŚCI I INNYCHY KOMPETENCJI EFEKTY KSZTAŁCENIA
 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: MATEMATYKA STOSOWANA 2. Kod przedmiotu: Ms 3. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego 4. Kierunek: Nawigacja 5. Specjalność: Nawigacja morska
I. KARTA PRZEDMIOTU. Nazwa przedmiotu: MATEMATYKA STOSOWANA 2. Kod przedmiotu: Ms 3. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego 4. Kierunek: Nawigacja 5. Specjalność: Nawigacja morska
Stosowana Analiza Regresji
 prostej Stosowana Wykład I 5 Października 2011 1 / 29 prostej Przykład Dane trees - wyniki pomiarów objętości (Volume), średnicy (Girth) i wysokości (Height) pni drzew. Interesuje nas zależność (o ile
prostej Stosowana Wykład I 5 Października 2011 1 / 29 prostej Przykład Dane trees - wyniki pomiarów objętości (Volume), średnicy (Girth) i wysokości (Height) pni drzew. Interesuje nas zależność (o ile
Spis treści. Przedmowa... XI. Rozdział 1. Pomiar: jednostki miar... 1. Rozdział 2. Pomiar: liczby i obliczenia liczbowe... 16
 Spis treści Przedmowa.......................... XI Rozdział 1. Pomiar: jednostki miar................. 1 1.1. Wielkości fizyczne i pozafizyczne.................. 1 1.2. Spójne układy miar. Układ SI i jego
Spis treści Przedmowa.......................... XI Rozdział 1. Pomiar: jednostki miar................. 1 1.1. Wielkości fizyczne i pozafizyczne.................. 1 1.2. Spójne układy miar. Układ SI i jego
= Zapiszemy poniższy układ w postaci macierzy. 8+$+ 2&=4 " 5 3$ 7&=0 5$+7&=4
 17. Układ równań 17.1 Co nazywamy układem równań liniowych? Jak zapisać układ w postaci macierzowej (pokazać również na przykładzie) Co to jest rozwiązanie układu? Jaki układ nazywamy jednorodnym, sprzecznym,
17. Układ równań 17.1 Co nazywamy układem równań liniowych? Jak zapisać układ w postaci macierzowej (pokazać również na przykładzie) Co to jest rozwiązanie układu? Jaki układ nazywamy jednorodnym, sprzecznym,
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
PROGRAMOWANIE NIELINIOWE
 PROGRAMOWANIE NIELINIOWE Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie programowania nieliniowego (ZPN) min f(x) g i (x) 0, h i (x) = 0, i = 1,..., m g i = 1,..., m h f(x) funkcja celu g i (x) i
PROGRAMOWANIE NIELINIOWE Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie programowania nieliniowego (ZPN) min f(x) g i (x) 0, h i (x) = 0, i = 1,..., m g i = 1,..., m h f(x) funkcja celu g i (x) i
w analizie wyników badań eksperymentalnych, w problemach modelowania zjawisk fizycznych, w analizie obserwacji statystycznych.
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(), zwaną funkcją aproksymującą
1 Pochodne wyższych rzędów
 1 Pochodne wyższych rzędów Definicja 1.1 (Pochodne cząstkowe drugiego rzędu) Niech f będzie odwzorowaniem o wartościach w R m, określonym na zbiorze G R k. Załóżmy, że zbiór tych x G, dla których istnieje
1 Pochodne wyższych rzędów Definicja 1.1 (Pochodne cząstkowe drugiego rzędu) Niech f będzie odwzorowaniem o wartościach w R m, określonym na zbiorze G R k. Załóżmy, że zbiór tych x G, dla których istnieje
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń