Algorytmy estymacji stanu (filtry)
|
|
|
- Andrzej Zając
- 8 lat temu
- Przeglądów:
Transkrypt
1 Algorytmy estymacji stanu (filtry) Na podstawie: AIMA ch15, Udacity (S. Thrun) Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 21 kwietnia 2014
2 Problem lokalizacji Obserwowalność? Determinizm?
3 Problem lokalizacji
4 Filtr Histogramowy
5 Filtr Histogramowy
6 Filtr Histogramowy
7 Filtr Histogramowy
8 Filtr Histogramowy
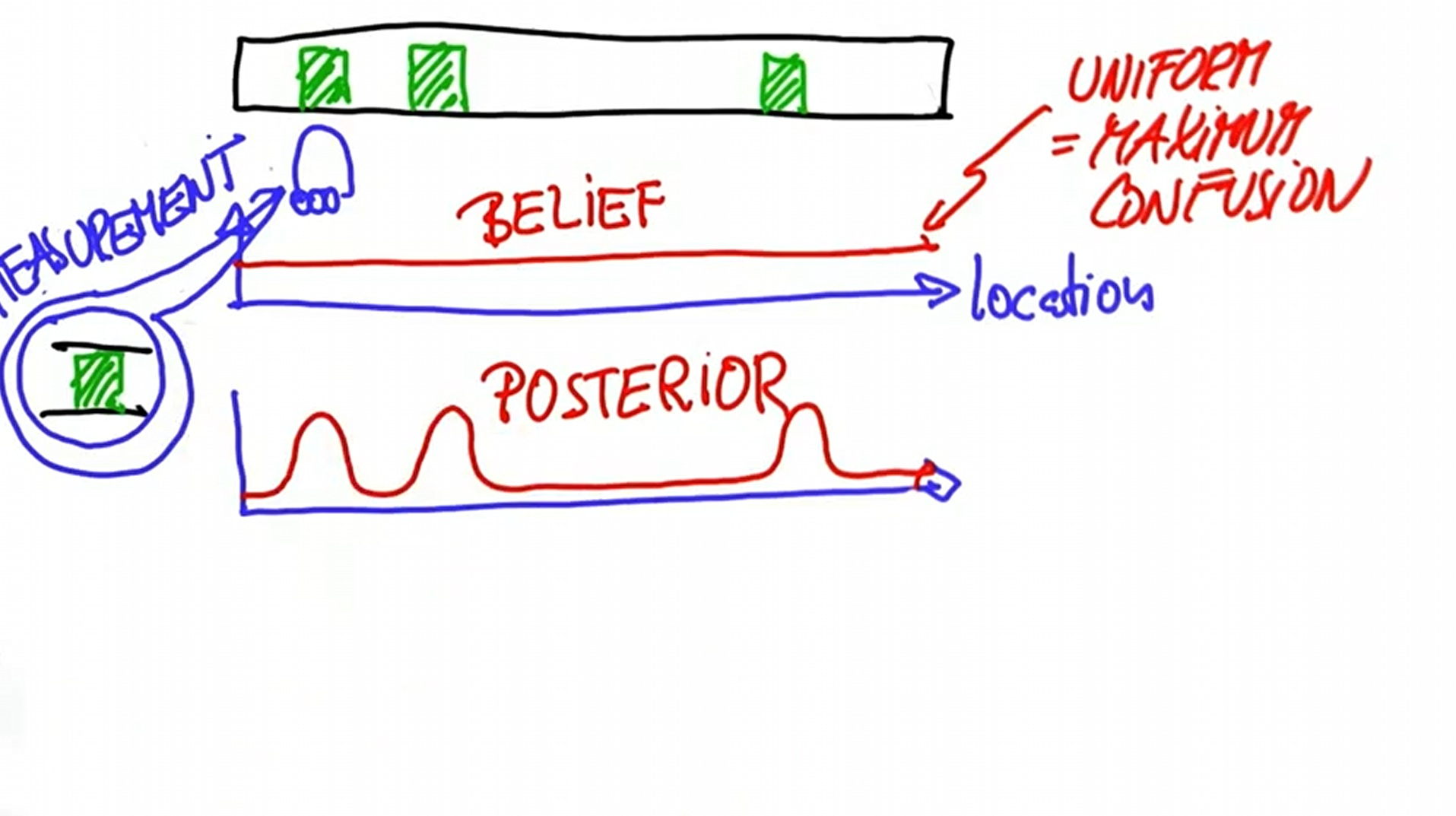
9 Pomiar
10 Pomiar
11 Pomiar [zadanie 1]
12 Pomiar wynik
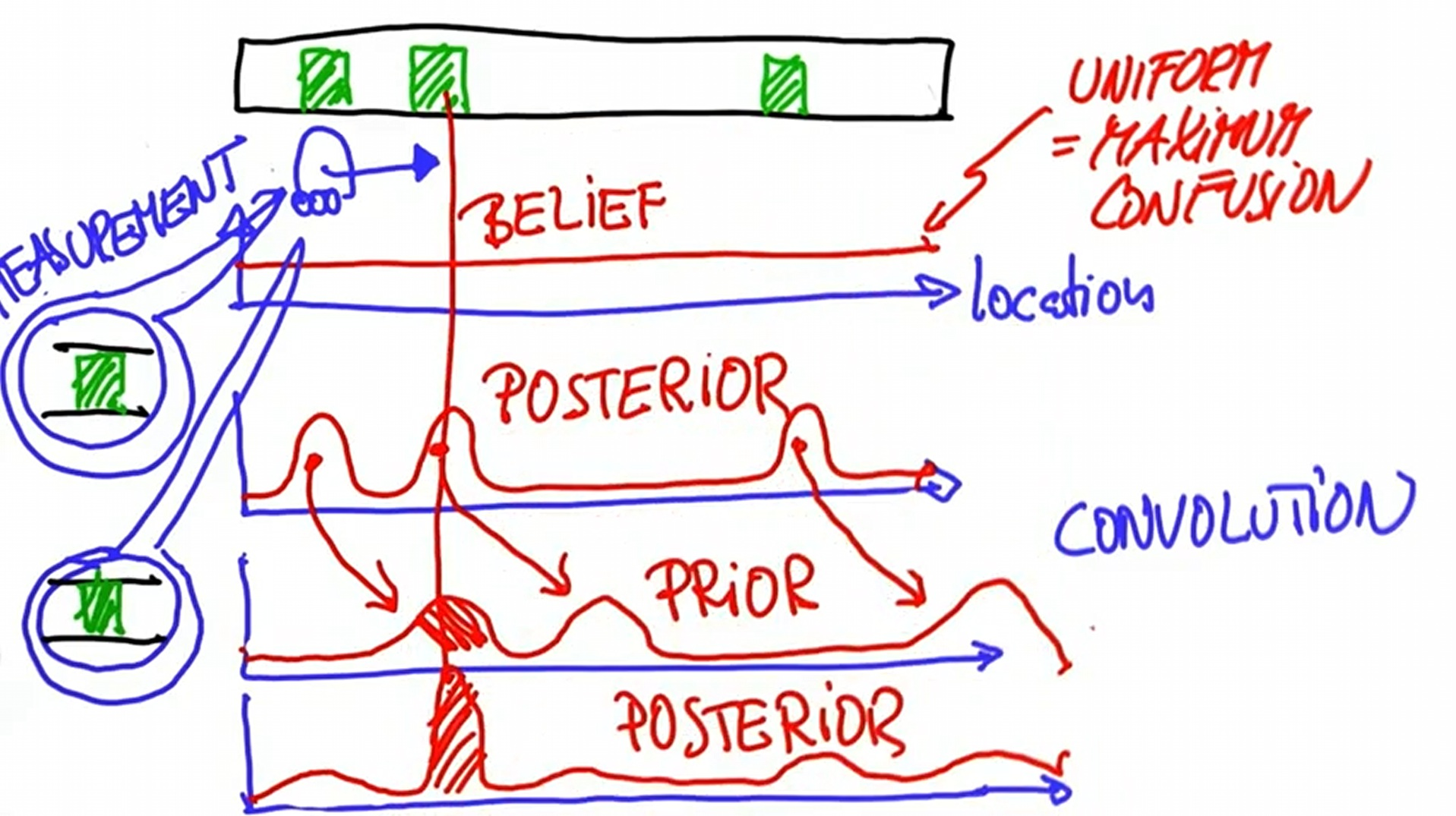
13 Ruch agenta Jak wygląda stan wiedzy (ang. belief) po ruchu o 1 pozycję w prawo?[zadanie 2]
14 Ruch agenta
15 (Niedokładny) ruch agenta P(X i+2 X i ) = 0.8 P(X i+1 X i ) = 0.1 P(X i+3 X i ) = 0.1 Jak wygląda rozkład po wykonaniu ruchu o 2 pola w prawo? [zadanie3]
16 (Niedokładny) ruch agenta P(X i+2 X i ) = 0.8 P(X i+1 X i ) = 0.1 P(X i+3 X i ) = 0.1 Jak wygląda rozkład po wykonaniu ruchu o 2 pola w prawo? [zadanie4]
17 Ruch agenta Jak wygląda rozkład w? [zadanie 5]
18 Lokalizacja
19 Lokalizacja
20 Lokalizacja podsumowanie Stan wiedzy: rozkład prawdopodobieństwa Obserwacja: iloczyn (stan wiedzy, pomiar) + normalizacja Ruch: konwolucja (stan wiedzy, model ruchu)
21 Lokalizacja podstawy matematyczne (obserwacja) Zmienne losowe: X robot jest na danym polu (X = x i znaczy, że jest na polu i-tym) Z wynik pomiaru P(X Z) = P(Z X )P(X ) P(Z) P(X ) rozkład a priori P(Z X ) rozkład prawd. pomiaru P(Z) normalizacja P(Z) = i P(Z xi)p(xi) = α
 P(X X ) rozkład prawd. związanych z wiedzą na temat ruchu (np.")
22 Lokalizacja podstawy matematyczne (ruch) Konwolucja: P(x t i ) = j P(x t 1 j )P(x i x j ) P(X t 1 ) rozkład prawd. a priori (np. P(x t 1 i ) P(X X ) rozkład prawd. związanych z wiedzą na temat ruchu (np. P(x i x j ))
23 Porównanie estymacji stanu Metoda stanowość rozkład Filtr histogramowy dyskretny multimodalny Filtr Kalmana ciągły unimodalny
24 Funkcja gaussowska
25 Funkcja gaussowska μ= 0, μ= 0, μ= 0, μ= 2, 2 σ = 0.2, 2 σ = 1.0, 2 σ = 5.0, 2 σ = 0.5, φ μ,σ 2( x) x f (x) = 1 1 (x µ) 2 2πσ 2 e 2 σ 2
26 Pomiar i ruch Pomiar: (iloczyn/bayes czy konwolucja/prawd. całkowite?)[zadanie 6] Ruch: (iloczyn/bayes czy konwolucja/prawd. całkowite?)
27 Pomiar rozkład a priori oraz pomiar
28 Pomiar Gdzie jest średnia f. gausowskiej (stanu wiedzy) po pomiarze? [zadanie 7]
29 Pomiar Gdzie jest amplituda f. gausowskiej (stanu wiedzy) po pomiarze? [zadanie 8]
30 Pomiar
31 Pomiar wzory Aktualizacja stanu wiedzy po pomiarze (mnożenie f. gaussowskich): µ = r 2 µ + σ 2 ν r 2 + σ 2
32 Zadanie na pobudkę µ = 10 ν = 12 σ 2 = 4 r 2 = 4 [zadanie 9] µ = r 2 µ + σ 2 ν r 2 + σ 2 σ 2 = 1 1 r σ 2
33 Pomiar wzory P(X ) rozkład a priori P(Z X ) pomiar P(X Z) rozkład a posteriori
34 Pomiar pytanie na koniec Jak będzie wyglądał rozkład a posteriori?[zadanie 10]
35 Ruch wzory Aktualizacja stanu wiedzy po ruchu: µ = µ + ν σ 2 = σ 2 + r 2
36 Wielowymiarowy filtr Kalmana Potrafi przewidywać pozycję na podstawie wiedzy o prędkości (bez jej pomiarów)
37 Wielowymiarowa f. gaussowska µ =... Σ = µ 0. µ D f (x) = (2π) D 2 Σ 1 2 exp( 1 2 (x µ)t Σ 1 (x µ))
38 Wielowymiarowa f. gaussowska
39 Wielowymiarowy filtr Kalmana
40 Wielowymiarowy filtr Kalmana Gdzie byśmy byli, gdyby prędkość wynosiła 0? A jeśli 1? A jeśli 2?
41 Wielowymiarowy filtr Kalmana (predykcja)
42 Wielowymiarowy filtr Kalmana x - obserwowane
43 Projektowanie filtru Kalmana F funkcja przejścia H funkcja pomiaru ( co obserwujemy )
44 Projektowanie filtru Kalmana równania x estymata P macierz kowariancji (niepewność) F funkcja przejścia u wektor ruchu z pomiar H funkcja pomiaru R niepewnośc pomiaru 1 macierz jednostkowa Ruch: x = Fx + u P = FPF T Pomiar: y = z Hx S = HPH T + R K = PH T S 1 x = x + (Ky) P = (1 KH)P
45 Porównanie Metoda przestrzeń stanów rozkład efektywność Filtr histogramowy dyskretna multimodalny Filtr Kalmana ciągła unimodalny
46 Porównanie Metoda przestrzeń stanów rozkład efektywność Filtr histogramowy dyskretna multimodalny Filtr Kalmana ciągła unimodalny Filtr cząsteczkowy ciągła multimodalny
47 Porównanie Metoda przestrzeń stanów rozkład efektywność Filtr histogramowy dyskretna multimodalny wykładniczy Filtr Kalmana ciągła unimodalny O(D 2 ) Filtr cząsteczkowy ciągła multimodalny szybki
48 Zalety filtru cząsteczkowego Filtr cząsteczkowy: bardzo prosty w implementacji bardzo elastyczny Przykład działania: (autor: Szymon Kaliski)
49 Robot
50 Robot
51 Filtr cząsteczkowy Krok algorytmu 1 (inicjalizacja) Inicjalizuj N cząstek losowo
52 Filtr cząsteczkowy Krok algorytmu 2 (ruch robota) Wykonaj ruch zgodnie z (zamierzonym) ruchem robota. Do ruchu dodaj trochę szumu, aby algorytm nie zbiegł do punktu. Szum odgrywa rolę mutacji.
53 Filtr cząsteczkowy
54 Filtr cząsteczkowy
55 Filtr cząsteczkowy (wagi cząsteczek) w i = Π L j=1f µi,σ(dist(p i, L j ))
56 Filtr cząsteczkowy Krok algorytmu 3 (przydział wag) Przydziel wagi cząsteczkom (prawd. pomiaru). Dla każdej cząsteczki p i : gdzie: f funkcja gaussowska w i = Π L j=1f µi,σ(dist(p i, L j )) µ i pomiar dla punktu orientacyjnego i σ niepewność pomiaru (sensorów) dist(p i, L j ) odległość pomiędzy pozycją i-tej cząsteczki a j-tym punktem orientacyjnym
57 Selekcja (ponowne próbkowanie) Krok algorytmu 4 (próbkowanie) Próbkuj populację cząstek
58 Selekcja przykład N = 5 w = {w 1 = 0.6, w 2 = 1.2, w 3 = 2.4, w 4 = 0.6, w 5 = 1.2} Jakie jest prawd niewylosowania p 3? [zadanie 11] Jakie jest prawd niewylosowania p 1? [zadanie 12]

59 Selekcja ruletkowa
60 Selekcja (szybsza) mx = max(w) b = 0 idx = randint(0,n) for i in range(n): b += random(0, 2*mx) while w[idx] < b: b -= w[idx] idx = (idx + 1) % N resampled.append(idx)
61 Podsumowanie
62 Zadanie Czy orientacja cząstek ma znaczenie?[zadanie 13]
63 Wady i zalety Przykład: (autor: Sebastian Thrun) Zalety: Wady: Proste w implementacji Zwykle działają bardzo dobrze Niewymagające obliczeniowo Działają dobrze nawet, gdy rozkłady: niemonotoniczne skomplikowane (niegaussowskie) Przekleństwo wymiarowości = rozszerzenia (np. filtry Rao-Blackwellized) Zbyt mało cząstek = kłopoty Mało szumów = kłopoty
64
Fuzja sygnałów i filtry bayesowskie
 Fuzja sygnałów i filtry bayesowskie Roboty Manipulacyjne i Mobilne dr inż. Janusz Jakubiak Katedra Cybernetyki i Robotyki Wydział Elektroniki, Politechnika Wrocławska Wrocław, 10.03.2015 Dlaczego potrzebna
Fuzja sygnałów i filtry bayesowskie Roboty Manipulacyjne i Mobilne dr inż. Janusz Jakubiak Katedra Cybernetyki i Robotyki Wydział Elektroniki, Politechnika Wrocławska Wrocław, 10.03.2015 Dlaczego potrzebna
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 2 autorzy: A. Gonczarek, J.M. Tomczak Metody estymacji ML Zad. 1 Pojawianie się spamu opisane jest zmienną losową x o rozkładzie dwupunktowym
Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 2 autorzy: A. Gonczarek, J.M. Tomczak Metody estymacji ML Zad. 1 Pojawianie się spamu opisane jest zmienną losową x o rozkładzie dwupunktowym
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 2 autorzy: A. Gonczarek, J.M. Tomczak Metody estymacji Zad. 1 Pojawianie się spamu opisane jest zmienną losową x o rozkładzie dwupunktowym
Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 2 autorzy: A. Gonczarek, J.M. Tomczak Metody estymacji Zad. 1 Pojawianie się spamu opisane jest zmienną losową x o rozkładzie dwupunktowym
Stacjonarne procesy gaussowskie, czyli o zwiazkach pomiędzy zwykła
 Stacjonarne procesy gaussowskie, czyli o zwiazkach pomiędzy zwykła autokorelacji Łukasz Dębowski ldebowsk@ipipan.waw.pl Instytut Podstaw Informatyki PAN autokorelacji p. 1/25 Zarys referatu Co to sa procesy
Stacjonarne procesy gaussowskie, czyli o zwiazkach pomiędzy zwykła autokorelacji Łukasz Dębowski ldebowsk@ipipan.waw.pl Instytut Podstaw Informatyki PAN autokorelacji p. 1/25 Zarys referatu Co to sa procesy
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 3 Metody estymacji. Estymator największej wiarygodności Zad. 1 Pojawianie się spamu opisane jest zmienną losową y o rozkładzie zero-jedynkowym
Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 3 Metody estymacji. Estymator największej wiarygodności Zad. 1 Pojawianie się spamu opisane jest zmienną losową y o rozkładzie zero-jedynkowym
ALHE Z11 Jarosław Arabas wykład 11
 ALHE Z11 Jarosław Arabas wykład 11 algorytm ewolucyjny inicjuj P 0 {x 1, x 2... x } t 0 while! stop for i 1: if a p c O t,i mutation crossover select P t, k else O t,i mutation select P t,1 P t 1 replacement
ALHE Z11 Jarosław Arabas wykład 11 algorytm ewolucyjny inicjuj P 0 {x 1, x 2... x } t 0 while! stop for i 1: if a p c O t,i mutation crossover select P t, k else O t,i mutation select P t,1 P t 1 replacement
Rozpoznawanie obrazów
 Rozpoznawanie obrazów Ćwiczenia lista zadań nr 5 autorzy: A. Gonczarek, J.M. Tomczak Przykładowe problemy Klasyfikacja binarna Dla obrazu x zaproponowano dwie cechy φ(x) = (φ 1 (x) φ 2 (x)) T. Na obrazie
Rozpoznawanie obrazów Ćwiczenia lista zadań nr 5 autorzy: A. Gonczarek, J.M. Tomczak Przykładowe problemy Klasyfikacja binarna Dla obrazu x zaproponowano dwie cechy φ(x) = (φ 1 (x) φ 2 (x)) T. Na obrazie
Rozpoznawanie obrazów
 Rozpoznawanie obrazów Ćwiczenia lista zadań nr 7 autorzy: A. Gonczarek, J.M. Tomczak Przykładowe problemy Klasyfikacja binarna Dla obrazu x zaproponowano dwie cechy φ(x) = (φ 1 (x) φ 2 (x)) T. Na obrazie
Rozpoznawanie obrazów Ćwiczenia lista zadań nr 7 autorzy: A. Gonczarek, J.M. Tomczak Przykładowe problemy Klasyfikacja binarna Dla obrazu x zaproponowano dwie cechy φ(x) = (φ 1 (x) φ 2 (x)) T. Na obrazie
WYKŁAD 4. Podejmowanie decyzji dla modeli probabilistycznych Modelowanie Gaussowskie. autor: Maciej Zięba. Politechnika Wrocławska
 Wrocław University of Technology WYKŁAD 4 Podejmowanie decyzji dla modeli probabilistycznych Modelowanie Gaussowskie autor: Maciej Zięba Politechnika Wrocławska Klasyfikacja Klasyfikacja (ang. Classification):
Wrocław University of Technology WYKŁAD 4 Podejmowanie decyzji dla modeli probabilistycznych Modelowanie Gaussowskie autor: Maciej Zięba Politechnika Wrocławska Klasyfikacja Klasyfikacja (ang. Classification):
Na podstawie: AIMA, ch13. Wojciech Jaśkowski. 15 marca 2013
 Na podstawie: AIMA, ch13 Instytut Informatyki, Politechnika Poznańska 15 marca 2013 Źródła niepewności Świat częściowo obserwowalny Świat niedeterministyczny Także: Lenistwo i ignorancja (niewiedza) Cel:
Na podstawie: AIMA, ch13 Instytut Informatyki, Politechnika Poznańska 15 marca 2013 Źródła niepewności Świat częściowo obserwowalny Świat niedeterministyczny Także: Lenistwo i ignorancja (niewiedza) Cel:
SPOTKANIE 3: Regresja: Regresja liniowa
 Wrocław University of Technology SPOTKANIE 3: Regresja: Regresja liniowa Adam Gonczarek Studenckie Koło Naukowe Estymator adam.gonczarek@pwr.wroc.pl 22.11.2013 Rozkład normalny Rozkład normalny (ang. normal
Wrocław University of Technology SPOTKANIE 3: Regresja: Regresja liniowa Adam Gonczarek Studenckie Koło Naukowe Estymator adam.gonczarek@pwr.wroc.pl 22.11.2013 Rozkład normalny Rozkład normalny (ang. normal
Na A (n) rozważamy rozkład P (n) , który na zbiorach postaci A 1... A n określa się jako P (n) (X n, A (n), P (n)
 rozważamy rozkład P (n) , który na zbiorach postaci A 1... A n określa się jako P (n) (X n, A (n), P (n)") MODELE STATYSTYCZNE Punktem wyjścia w rozumowaniu statystycznym jest zmienna losowa (cecha) X i jej obserwacje opisujące wyniki doświadczeń bądź pomiarów. Zbiór wartości zmiennej losowej X (zbiór wartości
MODELE STATYSTYCZNE Punktem wyjścia w rozumowaniu statystycznym jest zmienna losowa (cecha) X i jej obserwacje opisujące wyniki doświadczeń bądź pomiarów. Zbiór wartości zmiennej losowej X (zbiór wartości
Komputerowa analiza danych doświadczalnych
 Komputerowa analiza danych doświadczalnych Wykład 3 11.03.2016 dr inż. Łukasz Graczykowski lgraczyk@if.pw.edu.pl Wykłady z poprzednich lat (dr inż. H. Zbroszczyk): http://www.if.pw.edu.pl/~gos/student
Komputerowa analiza danych doświadczalnych Wykład 3 11.03.2016 dr inż. Łukasz Graczykowski lgraczyk@if.pw.edu.pl Wykłady z poprzednich lat (dr inż. H. Zbroszczyk): http://www.if.pw.edu.pl/~gos/student
Komputerowa analiza danych doświadczalnych
 Komputerowa analiza danych doświadczalnych Wykład 9 27.04.2018 dr inż. Łukasz Graczykowski lukasz.graczykowski@pw.edu.pl Semestr letni 2017/2018 Metoda największej wiarygodności ierównosć informacyjna
Komputerowa analiza danych doświadczalnych Wykład 9 27.04.2018 dr inż. Łukasz Graczykowski lukasz.graczykowski@pw.edu.pl Semestr letni 2017/2018 Metoda największej wiarygodności ierównosć informacyjna
Centralne twierdzenie graniczne
 Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 4 Ważne uzupełnienie Dwuwymiarowy rozkład normalny N (µ X, µ Y, σ X, σ Y, ρ): f XY (x, y) = 1 2πσ X σ Y 1 ρ 2 { [ (x ) 1
Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 4 Ważne uzupełnienie Dwuwymiarowy rozkład normalny N (µ X, µ Y, σ X, σ Y, ρ): f XY (x, y) = 1 2πσ X σ Y 1 ρ 2 { [ (x ) 1
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Laboratorium JAVA Zadanie nr 2 Rozpoznawanie liter autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się z problemem klasyfikacji
Metody systemowe i decyzyjne w informatyce Laboratorium JAVA Zadanie nr 2 Rozpoznawanie liter autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się z problemem klasyfikacji
Metoda największej wiarygodności
 Rozdział Metoda największej wiarygodności Ogólnie w procesie estymacji na podstawie prób x i (każde x i może być wektorem) wyznaczamy parametr λ (w ogólnym przypadku również wektor) opisujący domniemany
Rozdział Metoda największej wiarygodności Ogólnie w procesie estymacji na podstawie prób x i (każde x i może być wektorem) wyznaczamy parametr λ (w ogólnym przypadku również wektor) opisujący domniemany
WYKŁADY ZE STATYSTYKI MATEMATYCZNEJ wykład 13 i 14 - Statystyka bayesowska
 WYKŁADY ZE STATYSTYKI MATEMATYCZNEJ wykład 13 i 14 - Statystyka bayesowska Agata Boratyńska Agata Boratyńska Statystyka matematyczna, wykład 13 i 14 1 / 15 MODEL BAYESOWSKI, przykład wstępny Statystyka
WYKŁADY ZE STATYSTYKI MATEMATYCZNEJ wykład 13 i 14 - Statystyka bayesowska Agata Boratyńska Agata Boratyńska Statystyka matematyczna, wykład 13 i 14 1 / 15 MODEL BAYESOWSKI, przykład wstępny Statystyka
REGRESJA LINIOWA Z UOGÓLNIONĄ MACIERZĄ KOWARIANCJI SKŁADNIKA LOSOWEGO. Aleksander Nosarzewski Ekonometria bayesowska, prowadzący: dr Andrzej Torój
 1 REGRESJA LINIOWA Z UOGÓLNIONĄ MACIERZĄ KOWARIANCJI SKŁADNIKA LOSOWEGO Aleksander Nosarzewski Ekonometria bayesowska, prowadzący: dr Andrzej Torój 2 DOTYCHCZASOWE MODELE Regresja liniowa o postaci: y
1 REGRESJA LINIOWA Z UOGÓLNIONĄ MACIERZĄ KOWARIANCJI SKŁADNIKA LOSOWEGO Aleksander Nosarzewski Ekonometria bayesowska, prowadzący: dr Andrzej Torój 2 DOTYCHCZASOWE MODELE Regresja liniowa o postaci: y
Modele zapisane w przestrzeni stanów
 Modele zapisane w przestrzeni stanów Modele Przestrzeni Stanów (State Space Models) sa to modele, w których część parametrów jest nieobserwowalna i losowa. Zachowanie wielowymiarowej zmiennej y t zależy
Modele zapisane w przestrzeni stanów Modele Przestrzeni Stanów (State Space Models) sa to modele, w których część parametrów jest nieobserwowalna i losowa. Zachowanie wielowymiarowej zmiennej y t zależy
Komputerowa Analiza Danych Doświadczalnych
 Komputerowa Analiza Danych Doświadczalnych Prowadząca: dr inż. Hanna Zbroszczyk e-mail: gos@if.pw.edu.pl tel: +48 22 234 58 51 konsultacje: poniedziałek, 10-11, środa: 11-12 www: http://www.if.pw.edu.pl/~gos/students/kadd
Komputerowa Analiza Danych Doświadczalnych Prowadząca: dr inż. Hanna Zbroszczyk e-mail: gos@if.pw.edu.pl tel: +48 22 234 58 51 konsultacje: poniedziałek, 10-11, środa: 11-12 www: http://www.if.pw.edu.pl/~gos/students/kadd
1 Klasyfikator bayesowski
 Klasyfikator bayesowski Załóżmy, że dane są prawdopodobieństwa przynależności do klasp( ),P( 2 ),...,P( L ) przykładów z pewnego zadania klasyfikacji, jak również gęstości rozkładów prawdopodobieństw wystąpienia
Klasyfikator bayesowski Załóżmy, że dane są prawdopodobieństwa przynależności do klasp( ),P( 2 ),...,P( L ) przykładów z pewnego zadania klasyfikacji, jak również gęstości rozkładów prawdopodobieństw wystąpienia
Modele DSGE. Jerzy Mycielski. Maj Jerzy Mycielski () Modele DSGE Maj / 11
 Modele DSGE Maj / 11") Modele DSGE Jerzy Mycielski Maj 2008 Jerzy Mycielski () Modele DSGE Maj 2008 1 / 11 Modele DSGE DSGE - Dynamiczne, stochastyczne modele równowagi ogólnej (Dynamic Stochastic General Equilibrium Model)
Modele DSGE Jerzy Mycielski Maj 2008 Jerzy Mycielski () Modele DSGE Maj 2008 1 / 11 Modele DSGE DSGE - Dynamiczne, stochastyczne modele równowagi ogólnej (Dynamic Stochastic General Equilibrium Model)
Roboty Manipulacyjne i Mobilne Budowanie mapy, lokalizacja, SLAM
 Roboty Manipulacyjne i Mobilne Budowanie mapy, lokalizacja, SLAM Janusz Jakubiak Zakład Podstaw Cybernetyki i Robotyki Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska 4.05.2012 Budowanie
Roboty Manipulacyjne i Mobilne Budowanie mapy, lokalizacja, SLAM Janusz Jakubiak Zakład Podstaw Cybernetyki i Robotyki Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska 4.05.2012 Budowanie
Komputerowa analiza danych doświadczalnych
 Komputerowa analiza danych doświadczalnych Wykład 9 7.04.09 dr inż. Łukasz Graczykowski lukasz.graczykowski@pw.edu.pl Semestr letni 08/09 Metoda największej wiarygodności ierównosć informacyjna Metoda
Komputerowa analiza danych doświadczalnych Wykład 9 7.04.09 dr inż. Łukasz Graczykowski lukasz.graczykowski@pw.edu.pl Semestr letni 08/09 Metoda największej wiarygodności ierównosć informacyjna Metoda
SPOTKANIE 6: Klasteryzacja: K-Means, Expectation Maximization
 Wrocław University of Technology SPOTKANIE 6: Klasteryzacja: K-Means, Expectation Maximization Jakub M. Tomczak Studenckie Koło Naukowe Estymator jakub.tomczak@pwr.wroc.pl 4.1.213 Klasteryzacja Zmienne
Wrocław University of Technology SPOTKANIE 6: Klasteryzacja: K-Means, Expectation Maximization Jakub M. Tomczak Studenckie Koło Naukowe Estymator jakub.tomczak@pwr.wroc.pl 4.1.213 Klasteryzacja Zmienne
Modelowanie Niepewności
 Na podstawie: AIMA, ch13 Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 21 marca 2014 Na podstawie: AIMA, ch13 Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 21 marca
Na podstawie: AIMA, ch13 Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 21 marca 2014 Na podstawie: AIMA, ch13 Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 21 marca
INFORMATYKA W CHEMII Dr Piotr Szczepański
 INFORMATYKA W CHEMII Dr Piotr Szczepański Katedra Chemii Fizycznej i Fizykochemii Polimerów WPROWADZENIE DO STATYSTYCZNEJ OCENY WYNIKÓW DOŚWIADCZEŃ 1. BŁĄD I STATYSTYKA błąd systematyczny, błąd przypadkowy,
INFORMATYKA W CHEMII Dr Piotr Szczepański Katedra Chemii Fizycznej i Fizykochemii Polimerów WPROWADZENIE DO STATYSTYCZNEJ OCENY WYNIKÓW DOŚWIADCZEŃ 1. BŁĄD I STATYSTYKA błąd systematyczny, błąd przypadkowy,
Metody eksploracji danych 2. Metody regresji. Piotr Szwed Katedra Informatyki Stosowanej AGH 2017
 Metody eksploracji danych 2. Metody regresji Piotr Szwed Katedra Informatyki Stosowanej AGH 2017 Zagadnienie regresji Dane: Zbiór uczący: D = {(x i, y i )} i=1,m Obserwacje: (x i, y i ), wektor cech x
Metody eksploracji danych 2. Metody regresji Piotr Szwed Katedra Informatyki Stosowanej AGH 2017 Zagadnienie regresji Dane: Zbiór uczący: D = {(x i, y i )} i=1,m Obserwacje: (x i, y i ), wektor cech x
Wstęp do Metod Systemowych i Decyzyjnych Opracowanie: Jakub Tomczak
 Wstęp do Metod Systemowych i Decyzyjnych Opracowanie: Jakub Tomczak 1 Wprowadzenie. Zmienne losowe Podczas kursu interesować nas będzie wnioskowanie o rozpatrywanym zjawisku. Poprzez wnioskowanie rozumiemy
Wstęp do Metod Systemowych i Decyzyjnych Opracowanie: Jakub Tomczak 1 Wprowadzenie. Zmienne losowe Podczas kursu interesować nas będzie wnioskowanie o rozpatrywanym zjawisku. Poprzez wnioskowanie rozumiemy
Metody probabilistyczne
 Metody probabilistyczne 13. Elementy statystki matematycznej I Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 17.01.2019 1 / 30 Zagadnienia statystki Przeprowadzamy
Metody probabilistyczne 13. Elementy statystki matematycznej I Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 17.01.2019 1 / 30 Zagadnienia statystki Przeprowadzamy
Komputerowa analiza danych doświadczalnych. Wykład dr inż. Łukasz Graczykowski
 Komputerowa analiza danych doświadczalnych Wykład 3 9.03.2018 dr inż. Łukasz Graczykowski lukasz.graczykowski@pw.edu.pl Semestr letni 2017/2018 Dwuwymiarowe rozkłady zmiennych losowych Jednoczesne pomiary
Komputerowa analiza danych doświadczalnych Wykład 3 9.03.2018 dr inż. Łukasz Graczykowski lukasz.graczykowski@pw.edu.pl Semestr letni 2017/2018 Dwuwymiarowe rozkłady zmiennych losowych Jednoczesne pomiary
Filtracja pomiarów z głowic laserowych
 dr inż. st. of. Paweł Zalewsi Filtracja pomiarów z głowic laserowych słowa luczowe: filtracja pomiaru odległości, PNDS Założenia filtracji pomiaru odległości. Problem wyznaczenia odległości i parametrów
dr inż. st. of. Paweł Zalewsi Filtracja pomiarów z głowic laserowych słowa luczowe: filtracja pomiaru odległości, PNDS Założenia filtracji pomiaru odległości. Problem wyznaczenia odległości i parametrów
Filtr Kalmana. Struktury i Algorytmy Sterowania Wykład 1-2. prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz
 Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki 2013-10-09, Gdańsk Założenia
Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki 2013-10-09, Gdańsk Założenia
Optymalizacja optymalizacji
 7 maja 2008 Wstęp Optymalizacja lokalna Optymalizacja globalna Algorytmy genetyczne Badane czasteczki Wykorzystane oprogramowanie (Algorytm genetyczny) 2 Sieć neuronowa Pochodne met-enkefaliny Optymalizacja
7 maja 2008 Wstęp Optymalizacja lokalna Optymalizacja globalna Algorytmy genetyczne Badane czasteczki Wykorzystane oprogramowanie (Algorytm genetyczny) 2 Sieć neuronowa Pochodne met-enkefaliny Optymalizacja
Eksploracja Danych. wykład 4. Sebastian Zając. 10 maja 2017 WMP.SNŚ UKSW. Sebastian Zając (WMP.SNŚ UKSW) Eksploracja Danych 10 maja / 18
 Eksploracja Danych 10 maja / 18") Eksploracja Danych wykład 4 Sebastian Zając WMP.SNŚ UKSW 10 maja 2017 Sebastian Zając (WMP.SNŚ UKSW) Eksploracja Danych 10 maja 2017 1 / 18 Klasyfikacja danych Klasyfikacja Najczęściej stosowana (najstarsza)
Eksploracja Danych wykład 4 Sebastian Zając WMP.SNŚ UKSW 10 maja 2017 Sebastian Zając (WMP.SNŚ UKSW) Eksploracja Danych 10 maja 2017 1 / 18 Klasyfikacja danych Klasyfikacja Najczęściej stosowana (najstarsza)
PSO Rój cząsteczek - Particle Swarm Optimization. Michał Szopiak
 PSO Rój cząsteczek - Particle Swarm Optimization Michał Szopiak Inspiracje biologiczne Algorytm PSO wywodzą się z obserwacji gróp zwierzą tworzony przez członków ptasich stad, czy ławic ryb, który umożliwia
PSO Rój cząsteczek - Particle Swarm Optimization Michał Szopiak Inspiracje biologiczne Algorytm PSO wywodzą się z obserwacji gróp zwierzą tworzony przez członków ptasich stad, czy ławic ryb, który umożliwia
g) wartość oczekiwaną (przeciętną) i wariancję zmiennej losowej K.
 wartość oczekiwaną (przeciętną) i wariancję zmiennej losowej K.") TEMAT 1: WYBRANE ROZKŁADY TYPU SKOKOWEGO ROZKŁAD DWUMIANOWY (BERNOULLIEGO) Zadanie 1-1 Prawdopodobieństwo nieprzekroczenia przez pewien zakład pracy dobowego limitu zużycia energii elektrycznej (bez konieczności
TEMAT 1: WYBRANE ROZKŁADY TYPU SKOKOWEGO ROZKŁAD DWUMIANOWY (BERNOULLIEGO) Zadanie 1-1 Prawdopodobieństwo nieprzekroczenia przez pewien zakład pracy dobowego limitu zużycia energii elektrycznej (bez konieczności
Ważne rozkłady i twierdzenia c.d.
 Ważne rozkłady i twierdzenia c.d. Funkcja charakterystyczna rozkładu Wielowymiarowy rozkład normalny Elipsa kowariacji Sploty rozkładów Rozkłady jednostajne Sploty z rozkładem normalnym Pobieranie próby
Ważne rozkłady i twierdzenia c.d. Funkcja charakterystyczna rozkładu Wielowymiarowy rozkład normalny Elipsa kowariacji Sploty rozkładów Rozkłady jednostajne Sploty z rozkładem normalnym Pobieranie próby
Podstawowe modele probabilistyczne
 Wrocław University of Technology Podstawowe modele probabilistyczne Maciej Zięba maciej.zieba@pwr.edu.pl Rozpoznawanie Obrazów, Lato 2018/2019 Pojęcie prawdopodobieństwa Prawdopodobieństwo reprezentuje
Wrocław University of Technology Podstawowe modele probabilistyczne Maciej Zięba maciej.zieba@pwr.edu.pl Rozpoznawanie Obrazów, Lato 2018/2019 Pojęcie prawdopodobieństwa Prawdopodobieństwo reprezentuje
WYKŁAD 3. Klasyfikacja: modele probabilistyczne
 Wrocław University of Technology WYKŁAD 3 Klasyfikacja: modele probabilistyczne Maciej Zięba Politechnika Wrocławska Klasyfikacja Klasyfikacja (ang. Classification): Dysponujemy obserwacjami z etykietami
Wrocław University of Technology WYKŁAD 3 Klasyfikacja: modele probabilistyczne Maciej Zięba Politechnika Wrocławska Klasyfikacja Klasyfikacja (ang. Classification): Dysponujemy obserwacjami z etykietami
zadania z rachunku prawdopodobieństwa zapożyczone z egzaminów aktuarialnych
 zadania z rachunku prawdopodobieństwa zapożyczone z egzaminów aktuarialnych 1. [E.A 5.10.1996/zad.4] Funkcja gęstości dana jest wzorem { 3 x + 2xy + 1 y dla (x y) (0 1) (0 1) 4 4 P (X > 1 2 Y > 1 2 ) wynosi:
zadania z rachunku prawdopodobieństwa zapożyczone z egzaminów aktuarialnych 1. [E.A 5.10.1996/zad.4] Funkcja gęstości dana jest wzorem { 3 x + 2xy + 1 y dla (x y) (0 1) (0 1) 4 4 P (X > 1 2 Y > 1 2 ) wynosi:
Strategie ewolucyjne (ang. evolu4on strategies)
") Strategie ewolucyjne (ang. evolu4on strategies) Strategia ewolucyjna (1+1) W Strategii Ewolucyjnej(1 + 1), populacja złożona z jednego osobnika generuje jednego potomka. Kolejne (jednoelementowe) populacje
Strategie ewolucyjne (ang. evolu4on strategies) Strategia ewolucyjna (1+1) W Strategii Ewolucyjnej(1 + 1), populacja złożona z jednego osobnika generuje jednego potomka. Kolejne (jednoelementowe) populacje
KARTA MODUŁU / KARTA PRZEDMIOTU
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Cyfrowe przetwarzanie sygnałów pomiarowych_e2s
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Cyfrowe przetwarzanie sygnałów pomiarowych_e2s
ALGORYTMY EWOLUCYJNE W OPTYMALIZACJI JEDNOKRYTERIALNEJ
 ALGORYTMY EWOLUCYJNE W OPTYMALIZACJI JEDNOKRYTERIALNEJ Zalety: nie wprowadzają żadnych ograniczeń na sformułowanie problemu optymalizacyjnego. Funkcja celu może być wielowartościowa i nieciągła, obszar
ALGORYTMY EWOLUCYJNE W OPTYMALIZACJI JEDNOKRYTERIALNEJ Zalety: nie wprowadzają żadnych ograniczeń na sformułowanie problemu optymalizacyjnego. Funkcja celu może być wielowartościowa i nieciągła, obszar
ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU
 ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU Algorytmy śledzenia ruchu obiektów dr inż. Jacek Naruniec Wprowadzenie Śledzenie ruchu Śledzenie punktu Metody deterministyczne Metody statystyczne (Kalman, filtry
ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU Algorytmy śledzenia ruchu obiektów dr inż. Jacek Naruniec Wprowadzenie Śledzenie ruchu Śledzenie punktu Metody deterministyczne Metody statystyczne (Kalman, filtry
Prawdopodobieństwo i statystyka
 Wykład XIII: Prognoza. 26 stycznia 2015 Wykład XIII: Prognoza. Prognoza (predykcja) Przypuśćmy, że mamy dany ciąg liczb x 1, x 2,..., x n, stanowiących wyniki pomiaru pewnej zmiennej w czasie wielkości
Wykład XIII: Prognoza. 26 stycznia 2015 Wykład XIII: Prognoza. Prognoza (predykcja) Przypuśćmy, że mamy dany ciąg liczb x 1, x 2,..., x n, stanowiących wyniki pomiaru pewnej zmiennej w czasie wielkości
Matematyka z el. statystyki, # 6 /Geodezja i kartografia II/
 Matematyka z el. statystyki, # 6 /Geodezja i kartografia II/ Uniwersytet Przyrodniczy w Lublinie Katedra Zastosowań Matematyki i Informatyki ul. Głęboka 28, bud. CIW, p. 221 e-mail: zdzislaw.otachel@up.lublin.pl
Matematyka z el. statystyki, # 6 /Geodezja i kartografia II/ Uniwersytet Przyrodniczy w Lublinie Katedra Zastosowań Matematyki i Informatyki ul. Głęboka 28, bud. CIW, p. 221 e-mail: zdzislaw.otachel@up.lublin.pl
Uczenie sieci radialnych (RBF)
") Uczenie sieci radialnych (RBF) Budowa sieci radialnej Lokalne odwzorowanie przestrzeni wokół neuronu MLP RBF Budowa sieci radialnych Zawsze jedna warstwa ukryta Budowa neuronu Neuron radialny powinien
Uczenie sieci radialnych (RBF) Budowa sieci radialnej Lokalne odwzorowanie przestrzeni wokół neuronu MLP RBF Budowa sieci radialnych Zawsze jedna warstwa ukryta Budowa neuronu Neuron radialny powinien
Sieci Mobilne i Bezprzewodowe laboratorium 2 Modelowanie zdarzeń dyskretnych
 Sieci Mobilne i Bezprzewodowe laboratorium 2 Modelowanie zdarzeń dyskretnych Plan laboratorium Generatory liczb pseudolosowych dla rozkładów dyskretnych: Generator liczb o rozkładzie równomiernym Generator
Sieci Mobilne i Bezprzewodowe laboratorium 2 Modelowanie zdarzeń dyskretnych Plan laboratorium Generatory liczb pseudolosowych dla rozkładów dyskretnych: Generator liczb o rozkładzie równomiernym Generator
O ŚREDNIEJ STATYSTYCZNEJ
 Od średniej w modelu gaussowskim do kwantyli w podstawowym modelu nieparametrycznym IMPAN 1.X.2009 Rozszerzona wersja wykładu: O ŚREDNIEJ STATYSTYCZNEJ Ryszard Zieliński XII Międzynarodowe Warsztaty dla
Od średniej w modelu gaussowskim do kwantyli w podstawowym modelu nieparametrycznym IMPAN 1.X.2009 Rozszerzona wersja wykładu: O ŚREDNIEJ STATYSTYCZNEJ Ryszard Zieliński XII Międzynarodowe Warsztaty dla
Geometryczna zbieżność algorytmu Gibbsa
 Geometryczna zbieżność algorytmu Gibbsa Iwona Żerda Wydział Matematyki i Informatyki, Uniwersytet Jagielloński 6 grudnia 2013 6 grudnia 2013 1 / 19 Plan prezentacji 1 Algorytm Gibbsa 2 Tempo zbieżności
Geometryczna zbieżność algorytmu Gibbsa Iwona Żerda Wydział Matematyki i Informatyki, Uniwersytet Jagielloński 6 grudnia 2013 6 grudnia 2013 1 / 19 Plan prezentacji 1 Algorytm Gibbsa 2 Tempo zbieżności
WYKŁADY ZE STATYSTYKI MATEMATYCZNEJ wykład 3 - model statystyczny, podstawowe zadania statystyki matematycznej
 WYKŁADY ZE STATYSTYKI MATEMATYCZNEJ wykład 3 - model statystyczny, podstawowe zadania statystyki matematycznej Agata Boratyńska Agata Boratyńska Statystyka matematyczna, wykład 3 1 / 8 ZADANIE z rachunku
WYKŁADY ZE STATYSTYKI MATEMATYCZNEJ wykład 3 - model statystyczny, podstawowe zadania statystyki matematycznej Agata Boratyńska Agata Boratyńska Statystyka matematyczna, wykład 3 1 / 8 ZADANIE z rachunku
Spis treści Wstęp Estymacja Testowanie. Efekty losowe. Bogumiła Koprowska, Elżbieta Kukla
 Bogumiła Koprowska Elżbieta Kukla 1 Wstęp Czym są efekty losowe? Przykłady Model mieszany 2 Estymacja Jednokierunkowa klasyfikacja (ANOVA) Metoda największej wiarogodności (ML) Metoda największej wiarogodności
Bogumiła Koprowska Elżbieta Kukla 1 Wstęp Czym są efekty losowe? Przykłady Model mieszany 2 Estymacja Jednokierunkowa klasyfikacja (ANOVA) Metoda największej wiarogodności (ML) Metoda największej wiarogodności
Rozkłady wielu zmiennych
 Rozkłady wielu zmiennych Uogólnienie pojęć na rozkład wielu zmiennych Dystrybuanta, gęstość prawdopodobieństwa, rozkład brzegowy, wartości średnie i odchylenia standardowe, momenty Notacja macierzowa Macierz
Rozkłady wielu zmiennych Uogólnienie pojęć na rozkład wielu zmiennych Dystrybuanta, gęstość prawdopodobieństwa, rozkład brzegowy, wartości średnie i odchylenia standardowe, momenty Notacja macierzowa Macierz
Wykład 2 Hipoteza statystyczna, test statystyczny, poziom istotn. istotności, p-wartość i moc testu
 Wykład 2 Hipoteza statystyczna, test statystyczny, poziom istotności, p-wartość i moc testu Wrocław, 01.03.2017r Przykład 2.1 Właściciel firmy produkującej telefony komórkowe twierdzi, że wśród jego produktów
Wykład 2 Hipoteza statystyczna, test statystyczny, poziom istotności, p-wartość i moc testu Wrocław, 01.03.2017r Przykład 2.1 Właściciel firmy produkującej telefony komórkowe twierdzi, że wśród jego produktów
CMAES. Zapis algorytmu. Generacja populacji oraz selekcja Populacja q i (t) w kroku t generowana jest w następujący sposób:
 w kroku t generowana jest w następujący sposób:") CMAES Covariance Matrix Adaptation Evolution Strategy Opracowanie: Lidia Wojciechowska W algorytmie CMAES, podobnie jak w algorytmie EDA, adaptowany jest rozkład prawdopodobieństwa generacji punktów, opisany
CMAES Covariance Matrix Adaptation Evolution Strategy Opracowanie: Lidia Wojciechowska W algorytmie CMAES, podobnie jak w algorytmie EDA, adaptowany jest rozkład prawdopodobieństwa generacji punktów, opisany
PROCESY STOCHASTYCZNE. PEWNE KLASY PROCESÓW STOCHASTYCZNYCH Definicja. Procesem stochastycznym nazywamy rodzinę zmiennych losowych X(t) = X(t, ω)
 = X(t, ω)") PROCESY STOCHASTYCZNE. PEWNE KLASY PROCESÓW STOCHASTYCZNYCH Definicja. Procesem stochastycznym nazywamy rodzinę zmiennych losowych X(t) = X(t, ω) określonych na tej samej przestrzeni probabilistycznej
PROCESY STOCHASTYCZNE. PEWNE KLASY PROCESÓW STOCHASTYCZNYCH Definicja. Procesem stochastycznym nazywamy rodzinę zmiennych losowych X(t) = X(t, ω) określonych na tej samej przestrzeni probabilistycznej
Mikroekonometria 5. Mikołaj Czajkowski Wiktor Budziński
 Mikroekonometria 5 Mikołaj Czajkowski Wiktor Budziński Zadanie 1. Wykorzystując dane me.medexp3.dta przygotuj model regresji kwantylowej 1. Przygotuj model regresji kwantylowej w którym logarytm wydatków
Mikroekonometria 5 Mikołaj Czajkowski Wiktor Budziński Zadanie 1. Wykorzystując dane me.medexp3.dta przygotuj model regresji kwantylowej 1. Przygotuj model regresji kwantylowej w którym logarytm wydatków
Metoda największej wiarygodności
 Metoda największej wiarygodności Próbki w obecności tła Funkcja wiarygodności Iloraz wiarygodności Pomiary o różnej dokładności Obciążenie Informacja z próby i nierówność informacyjna Wariancja minimalna
Metoda największej wiarygodności Próbki w obecności tła Funkcja wiarygodności Iloraz wiarygodności Pomiary o różnej dokładności Obciążenie Informacja z próby i nierówność informacyjna Wariancja minimalna
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Superdyfuzja. Maria Knorps. Wydział Fizyki Technicznej i Matematyki stosowanej, Politechnika Gdańska
 VI Matematyczne Warsztaty KaeNeMów p. 1/2 Superdyfuzja Maria Knorps maria.knorps@gmail.com Wydział Fizyki Technicznej i Matematyki stosowanej, Politechnika Gdańska VI Matematyczne Warsztaty KaeNeMów p.
VI Matematyczne Warsztaty KaeNeMów p. 1/2 Superdyfuzja Maria Knorps maria.knorps@gmail.com Wydział Fizyki Technicznej i Matematyki stosowanej, Politechnika Gdańska VI Matematyczne Warsztaty KaeNeMów p.
WAE Jarosław Arabas Adaptacja i samoczynna adaptacja parametrów AE Algorytm CMA-ES
 WAE Jarosław Arabas Adaptacja i samoczynna adaptacja parametrów AE Algorytm CMA-ES Dynamika mutacyjnego AE Mutacja gaussowska σ=0.1 Wszystkie wygenerowane punkty Wartość średnia jakości punktów populacji
WAE Jarosław Arabas Adaptacja i samoczynna adaptacja parametrów AE Algorytm CMA-ES Dynamika mutacyjnego AE Mutacja gaussowska σ=0.1 Wszystkie wygenerowane punkty Wartość średnia jakości punktów populacji
Układy stochastyczne
 Instytut Informatyki Uniwersytetu Śląskiego 21 stycznia 2009 Definicja Definicja Proces stochastyczny to funkcja losowa, czyli funkcja matematyczna, której wartości leżą w przestrzeni zdarzeń losowych.
Instytut Informatyki Uniwersytetu Śląskiego 21 stycznia 2009 Definicja Definicja Proces stochastyczny to funkcja losowa, czyli funkcja matematyczna, której wartości leżą w przestrzeni zdarzeń losowych.
Współczesna technika inwersyjna - dokad zmierzamy? Wojciech Dȩbski
 Współczesna technika inwersyjna - dokad zmierzamy? Wojciech Dȩbski 24.5.2 Pomiar bezpośredni IGF, 24.5.2 IGF - Pomiar pośredni IGF, 24.5.2 IGF - 2 Interpretacja matematyczna m m + dm m d + dd d = G(m)
Współczesna technika inwersyjna - dokad zmierzamy? Wojciech Dȩbski 24.5.2 Pomiar bezpośredni IGF, 24.5.2 IGF - Pomiar pośredni IGF, 24.5.2 IGF - 2 Interpretacja matematyczna m m + dm m d + dd d = G(m)
WYKŁAD 6. Witold Bednorz, Paweł Wolff. Rachunek Prawdopodobieństwa, WNE, Uniwersytet Warszawski. 1 Instytut Matematyki
 WYKŁAD 6 Witold Bednorz, Paweł Wolff 1 Instytut Matematyki Uniwersytet Warszawski Rachunek Prawdopodobieństwa, WNE, 2010-2011 Własności Wariancji Przypomnijmy, że VarX = E(X EX) 2 = EX 2 (EX) 2. Własności
WYKŁAD 6 Witold Bednorz, Paweł Wolff 1 Instytut Matematyki Uniwersytet Warszawski Rachunek Prawdopodobieństwa, WNE, 2010-2011 Własności Wariancji Przypomnijmy, że VarX = E(X EX) 2 = EX 2 (EX) 2. Własności
1.1 Wstęp Literatura... 1
 Spis treści Spis treści 1 Wstęp 1 1.1 Wstęp................................ 1 1.2 Literatura.............................. 1 2 Elementy rachunku prawdopodobieństwa 2 2.1 Podstawy..............................
Spis treści Spis treści 1 Wstęp 1 1.1 Wstęp................................ 1 1.2 Literatura.............................. 1 2 Elementy rachunku prawdopodobieństwa 2 2.1 Podstawy..............................
Statystyka aktuarialna i teoria ryzyka, rozkłady szkód
 Statystyka aktuarialna i teoria ryzyka, rozkłady szkód Agata Boratyńska SGH, Warszawa Agata Boratyńska (SGH) SAiTR wykład 7 1 / 16 ROZKŁADY WARTOŚCI SZKÓD Podstawowe własności: rozkłady skupione na dodatniej
Statystyka aktuarialna i teoria ryzyka, rozkłady szkód Agata Boratyńska SGH, Warszawa Agata Boratyńska (SGH) SAiTR wykład 7 1 / 16 ROZKŁADY WARTOŚCI SZKÓD Podstawowe własności: rozkłady skupione na dodatniej
Politechnika Gdańska Wydział Elektrotechniki i Automatyki. Automatyka i Robotyka Systemy Sterowania i Wspomagania Decyzji
 Monitorowanie i Diagnostyka w Systemach Sterowania (MiDwSS) Podstawowe sposoby opisu niepewności, wybrane zagadnienia zastosowania estymacji rekursywnej dla potrzeb monitorowania i diagnostyki w systemach
Monitorowanie i Diagnostyka w Systemach Sterowania (MiDwSS) Podstawowe sposoby opisu niepewności, wybrane zagadnienia zastosowania estymacji rekursywnej dla potrzeb monitorowania i diagnostyki w systemach
Proces rezerwy w czasie dyskretnym z losową stopą procentową i losową składką
 z losową stopą procentową i losową składką Instytut Matematyki i Informatyki Politechniki Wrocławskiej 10 czerwca 2008 Oznaczenia Wprowadzenie ξ n liczba wypłat w (n 1, n], Oznaczenia Wprowadzenie ξ n
z losową stopą procentową i losową składką Instytut Matematyki i Informatyki Politechniki Wrocławskiej 10 czerwca 2008 Oznaczenia Wprowadzenie ξ n liczba wypłat w (n 1, n], Oznaczenia Wprowadzenie ξ n
Zadania z Rachunku Prawdopodobieństwa III - 1
 Zadania z Rachunku Prawdopodobieństwa III - 1 Funkcją tworzącą momenty (transformatą Laplace a) zmiennej losowej X nazywamy funkcję M X (t) := Ee tx, t R. 1. Oblicz funkcję tworzącą momenty zmiennych o
Zadania z Rachunku Prawdopodobieństwa III - 1 Funkcją tworzącą momenty (transformatą Laplace a) zmiennej losowej X nazywamy funkcję M X (t) := Ee tx, t R. 1. Oblicz funkcję tworzącą momenty zmiennych o
ZAJĘCIA II. Zmienne losowe, sygnały stochastyczne, zakłócenia pomiarowe
 ZAJĘCIA II Zmienne losowe, sygnały stochastyczne, zakłócenia pomiarowe Po co statystyka w identyfikacji? Zmienne losowe i ich parametry Korelacja zmiennych losowych Rozkłady wielowymiarowe i sygnały stochastyczne
ZAJĘCIA II Zmienne losowe, sygnały stochastyczne, zakłócenia pomiarowe Po co statystyka w identyfikacji? Zmienne losowe i ich parametry Korelacja zmiennych losowych Rozkłady wielowymiarowe i sygnały stochastyczne
ALHE Jarosław Arabas Metaheurystyki w Rn Ewolucja różnicowa EDA CMAES Rój cząstek
 ALHE Jarosław Arabas Metaheurystyki w Rn Ewolucja różnicowa EDA CMAES Rój cząstek Metoda przeszukiwania stan adaptacja S0 S1 om : Π X M M inicjacja S2 S4 S8 selekcja I : S U X o s : Π H U X wariacja o
ALHE Jarosław Arabas Metaheurystyki w Rn Ewolucja różnicowa EDA CMAES Rój cząstek Metoda przeszukiwania stan adaptacja S0 S1 om : Π X M M inicjacja S2 S4 S8 selekcja I : S U X o s : Π H U X wariacja o
Algorytmy MCMC (Markowowskie Monte Carlo) dla skokowych procesów Markowa
 dla skokowych procesów Markowa") Algorytmy MCMC (Markowowskie Monte Carlo) dla skokowych procesów Markowa Wojciech Niemiro 1 Uniwersytet Warszawski i UMK Toruń XXX lat IMSM, Warszawa, kwiecień 2017 1 Wspólne prace z Błażejem Miasojedowem,
Algorytmy MCMC (Markowowskie Monte Carlo) dla skokowych procesów Markowa Wojciech Niemiro 1 Uniwersytet Warszawski i UMK Toruń XXX lat IMSM, Warszawa, kwiecień 2017 1 Wspólne prace z Błażejem Miasojedowem,
Zmienne losowe. Powtórzenie. Dariusz Uciński. Wykład 1. Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski
 Powtórzenie Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 1 Podręcznik podstawowy Jacek Koronacki, Jan Mielniczuk: Statystyka dla studentów kierunków technicznych i przyrodnicznych,
Powtórzenie Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 1 Podręcznik podstawowy Jacek Koronacki, Jan Mielniczuk: Statystyka dla studentów kierunków technicznych i przyrodnicznych,
Komputerowa analiza danych doświadczalnych
 Komputerowa analiza danych doświadczalnych Wykład 10 8.04.017 dr inż. Łukasz Graczykowski lgraczyk@if.pw.edu.pl Semestr letni 016/017 Metoda największej wiarygodności - przykład ierównosć informacyjna
Komputerowa analiza danych doświadczalnych Wykład 10 8.04.017 dr inż. Łukasz Graczykowski lgraczyk@if.pw.edu.pl Semestr letni 016/017 Metoda największej wiarygodności - przykład ierównosć informacyjna
Hipotezy statystyczne
 Hipotezą statystyczną nazywamy każde przypuszczenie dotyczące nieznanego rozkładu badanej cechy populacji, o którego prawdziwości lub fałszywości wnioskuje się na podstawie pobranej próbki losowej. Hipotezy
Hipotezą statystyczną nazywamy każde przypuszczenie dotyczące nieznanego rozkładu badanej cechy populacji, o którego prawdziwości lub fałszywości wnioskuje się na podstawie pobranej próbki losowej. Hipotezy
STATYSTYKA MATEMATYCZNA WYKŁAD października 2009
 STATYSTYKA MATEMATYCZNA WYKŁAD 4 26 października 2009 Rozkład N(µ, σ). Estymacja σ σ 2 = 1 σ 2π + = E µ,σ (X µ) 2 { (x µ) 2 exp 1 ( ) } x µ 2 dx 2 σ Rozkład N(µ, σ). Estymacja σ σ 2 = 1 σ 2π + = E µ,σ
STATYSTYKA MATEMATYCZNA WYKŁAD 4 26 października 2009 Rozkład N(µ, σ). Estymacja σ σ 2 = 1 σ 2π + = E µ,σ (X µ) 2 { (x µ) 2 exp 1 ( ) } x µ 2 dx 2 σ Rozkład N(µ, σ). Estymacja σ σ 2 = 1 σ 2π + = E µ,σ
Rozkłady prawdopodobieństwa zmiennych losowych
 Rozkłady prawdopodobieństwa zmiennych losowych Rozkład dwumianowy Rozkład normalny Marta Zalewska Zmienna losowa dyskretna (skokowa) jest to zmienna, której zbór wartości jest skończony lub przeliczalny.
Rozkłady prawdopodobieństwa zmiennych losowych Rozkład dwumianowy Rozkład normalny Marta Zalewska Zmienna losowa dyskretna (skokowa) jest to zmienna, której zbór wartości jest skończony lub przeliczalny.
Rozdział 2: Metoda największej wiarygodności i nieliniowa metoda najmniejszych kwadratów
 Rozdział : Metoda największej wiarygodności i nieliniowa metoda najmniejszych kwadratów W tym rozdziale omówione zostaną dwie najpopularniejsze metody estymacji parametrów w ekonometrycznych modelach nieliniowych,
Rozdział : Metoda największej wiarygodności i nieliniowa metoda najmniejszych kwadratów W tym rozdziale omówione zostaną dwie najpopularniejsze metody estymacji parametrów w ekonometrycznych modelach nieliniowych,
Wprowadzenie do uczenia maszynowego. Jakub Tomczak
 Wprowadzenie do uczenia maszynowego Jakub Tomczak 2014 ii Rozdział 1 Pojęcia podstawowe 1.1 Wprowadzenie. Zmienne losowe ˆ Podczas kursu interesować nas będzie wnioskowanie o rozpatrywanym zjawisku. Poprzez
Wprowadzenie do uczenia maszynowego Jakub Tomczak 2014 ii Rozdział 1 Pojęcia podstawowe 1.1 Wprowadzenie. Zmienne losowe ˆ Podczas kursu interesować nas będzie wnioskowanie o rozpatrywanym zjawisku. Poprzez
Statystyka matematyczna
 Statystyka matematyczna Wykład 6 Magdalena Alama-Bućko 8 kwietnia 019 Magdalena Alama-Bućko Statystyka matematyczna 8 kwietnia 019 1 / 1 Rozkłady ciagłe Magdalena Alama-Bućko Statystyka matematyczna 8
Statystyka matematyczna Wykład 6 Magdalena Alama-Bućko 8 kwietnia 019 Magdalena Alama-Bućko Statystyka matematyczna 8 kwietnia 019 1 / 1 Rozkłady ciagłe Magdalena Alama-Bućko Statystyka matematyczna 8
Procesy stochastyczne
 Wykład I: Istnienie procesów stochastycznych 2 marca 2015 Forma zaliczenia przedmiotu Forma zaliczenia Literatura 1 Zaliczenie ćwiczeń rachunkowych. 2 Egzamin ustny z teorii 3 Do wykładu przygotowane są
Wykład I: Istnienie procesów stochastycznych 2 marca 2015 Forma zaliczenia przedmiotu Forma zaliczenia Literatura 1 Zaliczenie ćwiczeń rachunkowych. 2 Egzamin ustny z teorii 3 Do wykładu przygotowane są
Zmienne losowe, statystyki próbkowe. Wrocław, 2 marca 2015
 Zmienne losowe, statystyki próbkowe Wrocław, 2 marca 2015 Zasady zaliczenia 2 kolokwia (każde po 20 punktów) projekt (20 punktów) aktywność Zasady zaliczenia 2 kolokwia (każde po 20 punktów) projekt (20
Zmienne losowe, statystyki próbkowe Wrocław, 2 marca 2015 Zasady zaliczenia 2 kolokwia (każde po 20 punktów) projekt (20 punktów) aktywność Zasady zaliczenia 2 kolokwia (każde po 20 punktów) projekt (20
Szkice do zajęć z Przedmiotu Wyrównawczego
 Szkice do zajęć z Przedmiotu Wyrównawczego Matematyka Finansowa sem. letni 2011/2012 Spis treści Zajęcia 1 3 1.1 Przestrzeń probabilistyczna................................. 3 1.2 Prawdopodobieństwo warunkowe..............................
Szkice do zajęć z Przedmiotu Wyrównawczego Matematyka Finansowa sem. letni 2011/2012 Spis treści Zajęcia 1 3 1.1 Przestrzeń probabilistyczna................................. 3 1.2 Prawdopodobieństwo warunkowe..............................
Prawdopodobieństwo Odp. Odp. 6 Odp. 1/6 Odp. 1/3. Odp. 0, 75.
 Prawdopodobieństwo 2.1. Rzucamy dwukrotnie kostką do gry. Obliczyć prawdopodobieństwo, że suma oczek będzie większa od 9, jeżeli za pierwszym razem wypadło 6 oczek? Odp. 1 2. 2.2. W skrzyni znajduje się
Prawdopodobieństwo 2.1. Rzucamy dwukrotnie kostką do gry. Obliczyć prawdopodobieństwo, że suma oczek będzie większa od 9, jeżeli za pierwszym razem wypadło 6 oczek? Odp. 1 2. 2.2. W skrzyni znajduje się
Problemy Decyzyjne Markowa
 Problemy Decyzyjne Markowa na podstawie AIMA ch17 i slajdów S. Russel a Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 18 kwietnia 2013 Sekwencyjne problemy decyzyjne Cechy sekwencyjnego
Problemy Decyzyjne Markowa na podstawie AIMA ch17 i slajdów S. Russel a Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 18 kwietnia 2013 Sekwencyjne problemy decyzyjne Cechy sekwencyjnego
METODY ESTYMACJI PUNKTOWEJ. nieznanym parametrem (lub wektorem parametrów). Przez X będziemy też oznaczać zmienną losową o rozkładzie
. Przez X będziemy też oznaczać zmienną losową o rozkładzie") METODY ESTYMACJI PUNKTOWEJ X 1,..., X n - próbka z rozkładu P θ, θ Θ, θ jest nieznanym parametrem (lub wektorem parametrów). Przez X będziemy też oznaczać zmienną losową o rozkładzie P θ. Definicja. Estymatorem
METODY ESTYMACJI PUNKTOWEJ X 1,..., X n - próbka z rozkładu P θ, θ Θ, θ jest nieznanym parametrem (lub wektorem parametrów). Przez X będziemy też oznaczać zmienną losową o rozkładzie P θ. Definicja. Estymatorem
Mikroekonometria 6. Mikołaj Czajkowski Wiktor Budziński
 Mikroekonometria 6 Mikołaj Czajkowski Wiktor Budziński Metody symulacyjne Monte Carlo Metoda Monte-Carlo Wykorzystanie mocy obliczeniowej komputerów, aby poznać charakterystyki zmiennych losowych poprzez
Mikroekonometria 6 Mikołaj Czajkowski Wiktor Budziński Metody symulacyjne Monte Carlo Metoda Monte-Carlo Wykorzystanie mocy obliczeniowej komputerów, aby poznać charakterystyki zmiennych losowych poprzez
SMOP - wykład. Rozkład normalny zasady przenoszenia błędów. Ewa Pawelec
 SMOP - wykład Rozkład normalny zasady przenoszenia błędów Ewa Pawelec 1 iepewność dla rozkładu norm. Zamiast dodawania całych zakresów uwzględniamy prawdopodobieństwo trafienia dwóch wartości: P x 1, x
SMOP - wykład Rozkład normalny zasady przenoszenia błędów Ewa Pawelec 1 iepewność dla rozkładu norm. Zamiast dodawania całych zakresów uwzględniamy prawdopodobieństwo trafienia dwóch wartości: P x 1, x
Wielowymiarowy próbnik Gibbsa
 29.05.2006 Seminarium szkoleniowe 30 maja 2006 Plan prezentacji Slgorytm MH i PG przypomnienie wiadomości Wielowymiarowy PG Algorytm PG z dopełnieniem Odwracalny PG Modele hierarchiczne Modele hybrydowe
29.05.2006 Seminarium szkoleniowe 30 maja 2006 Plan prezentacji Slgorytm MH i PG przypomnienie wiadomości Wielowymiarowy PG Algorytm PG z dopełnieniem Odwracalny PG Modele hierarchiczne Modele hybrydowe
Kwantyle. Kwantyl rzędu p rozkładu prawdopodobieństwa to taka liczba x p. , że. Możemy go obliczyć z dystrybuanty: P(X x p.
 Kwantyle Kwantyl rzędu p rozkładu prawdopodobieństwa to taka liczba x p, że P(X x p ) p P(X x p ) 1 p Możemy go obliczyć z dystrybuanty: Jeżeli F(x p ) = p, to x p jest kwantylem rzędu p Jeżeli F(x p )
Kwantyle Kwantyl rzędu p rozkładu prawdopodobieństwa to taka liczba x p, że P(X x p ) p P(X x p ) 1 p Możemy go obliczyć z dystrybuanty: Jeżeli F(x p ) = p, to x p jest kwantylem rzędu p Jeżeli F(x p )
Zmienne losowe ciągłe i ich rozkłady
 Rachunek Prawdopodobieństwa i Statystyka - W3 Zmienne losowe ciągłe i ich rozkłady Dr Anna ADRIAN Paw B5, pok47 adan@agh.edu.pl Plan wykładu Zmienna losowa ciągła Dystrybuanta i unkcja gęstości rozkładu
Rachunek Prawdopodobieństwa i Statystyka - W3 Zmienne losowe ciągłe i ich rozkłady Dr Anna ADRIAN Paw B5, pok47 adan@agh.edu.pl Plan wykładu Zmienna losowa ciągła Dystrybuanta i unkcja gęstości rozkładu
Procesy stochastyczne
 Wykład I: Istnienie procesów stochastycznych 21 lutego 2017 Forma zaliczenia przedmiotu Forma zaliczenia Literatura 1 Zaliczenie ćwiczeń rachunkowych. 2 Egzamin ustny z teorii 3 Do wykładu przygotowane
Wykład I: Istnienie procesów stochastycznych 21 lutego 2017 Forma zaliczenia przedmiotu Forma zaliczenia Literatura 1 Zaliczenie ćwiczeń rachunkowych. 2 Egzamin ustny z teorii 3 Do wykładu przygotowane
Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I
 Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje:
Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje:
1 Wykład 3 Generatory liczb losowych o dowolnych rozkładach.
 Wykład 3 Generatory liczb losowych o dowolnych rozkładach.. Metoda odwracania Niech X oznacza zmienna losowa o dystrybuancie F. Oznaczmy F (t) = inf (x : t F (x)). Uwaga Zauważmy, że t [0, ] : F ( F (t)
Wykład 3 Generatory liczb losowych o dowolnych rozkładach.. Metoda odwracania Niech X oznacza zmienna losowa o dystrybuancie F. Oznaczmy F (t) = inf (x : t F (x)). Uwaga Zauważmy, że t [0, ] : F ( F (t)
Wykorzystanie symetrii przy pomiarze rozkładu kąta rozproszenia w procesie pp pp
 Wykorzystanie symetrii przy pomiarze rozkładu kąta rozproszenia w procesie pp pp M. Barej 1 K. Wójcik 2 1 Akademia Górniczo-Hutnicza w Krakowie 2 Uniwersytet Śląski w Katowicach 16 września 2016 M. Barej,
Wykorzystanie symetrii przy pomiarze rozkładu kąta rozproszenia w procesie pp pp M. Barej 1 K. Wójcik 2 1 Akademia Górniczo-Hutnicza w Krakowie 2 Uniwersytet Śląski w Katowicach 16 września 2016 M. Barej,
Wykład 10 Estymacja przedziałowa - przedziały ufności dla średn
 Wykład 10 Estymacja przedziałowa - przedziały ufności dla średniej Wrocław, 21 grudnia 2016r Przedział ufności Niech będzie dana próba X 1, X 2,..., X n z rozkładu P θ, θ Θ. Definicja 10.1 Przedziałem
Wykład 10 Estymacja przedziałowa - przedziały ufności dla średniej Wrocław, 21 grudnia 2016r Przedział ufności Niech będzie dana próba X 1, X 2,..., X n z rozkładu P θ, θ Θ. Definicja 10.1 Przedziałem
Wykład z analizy danych: powtórzenie zagadnień z rachunku prawdopodobieństwa
 Wykład z analizy danych: powtórzenie zagadnień z rachunku prawdopodobieństwa Marek Kubiak Instytut Informatyki Politechnika Poznańska Plan wykładu Podstawowe pojęcia rachunku prawdopodobieństwa Rozkład
Wykład z analizy danych: powtórzenie zagadnień z rachunku prawdopodobieństwa Marek Kubiak Instytut Informatyki Politechnika Poznańska Plan wykładu Podstawowe pojęcia rachunku prawdopodobieństwa Rozkład
Weryfikacja hipotez statystycznych
 Weryfikacja hipotez statystycznych Hipoteza Test statystyczny Poziom istotności Testy jednostronne i dwustronne Testowanie równości wariancji test F-Fishera Testowanie równości wartości średnich test t-studenta
Weryfikacja hipotez statystycznych Hipoteza Test statystyczny Poziom istotności Testy jednostronne i dwustronne Testowanie równości wariancji test F-Fishera Testowanie równości wartości średnich test t-studenta