1. Transformata Laplace a przypomnienie
|
|
|
- Maja Wacława Bednarczyk
- 7 lat temu
- Przeglądów:
Transkrypt
1 Transformata Laplace a - przypomnienie, transmitancja operatorowa, schematy blokowe, wprowadzenie do pakietu Matlab/Scilab i Simulink, regulatory PID - transmitancja, przykłady modeli matematycznych wybranych obiektów regulacji.. Transformata Laplace a przypomnienie Transformata jednostronna f(t) oryginał spełniający odpowiednie warunki (w naszych rozważaniach spełnione) F(s) transformata, s zmienna zespolona Tablica podstawowych własności Uproszczona tablica podstawowych transformat
2 , zerowe warunki początkowe* zerowe warunki początkowe* *, *, * Przykład 2
3 - obustronnie stosujemy przekształcenie Laplace a dla dla na podstawie tabeli Metoda rozkładu na ułamki proste Pierwiastki jednokrotne rzeczywiste - metoda przesłaniania Pierwiastki zespolone - rzeczywisty 3

4 - metoda przesłaniania Wskazówka - dla biegunów rzeczywistych odpowiedź to suma funkcji wykładniczych ewentualnie mnożonych przez dla biegunów n-krotnych - dla biegunów zespolonych jednokrotnych odpowiedź to suma funkcji sin i cos z amplitudą modyfikowaną wykładniczo Nieformalna wskazówka: 2. Transmitancja operatorowa Uwaga Pierwiastki licznika transmitancji nazywamy zerami zaś pierwiastki mianownika transmitancji nazywamy biegunami. Uwaga Parametry transmitancji zależą tylko od właściwości obiektu a nie od charakteru sygnału wejściowego. Przykład cd. 4


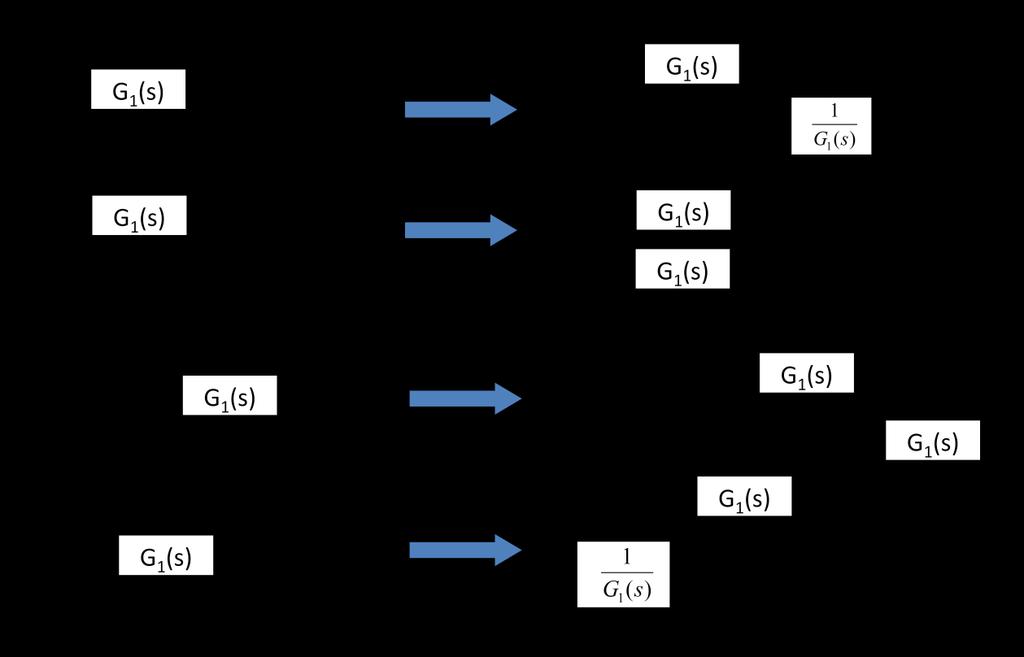
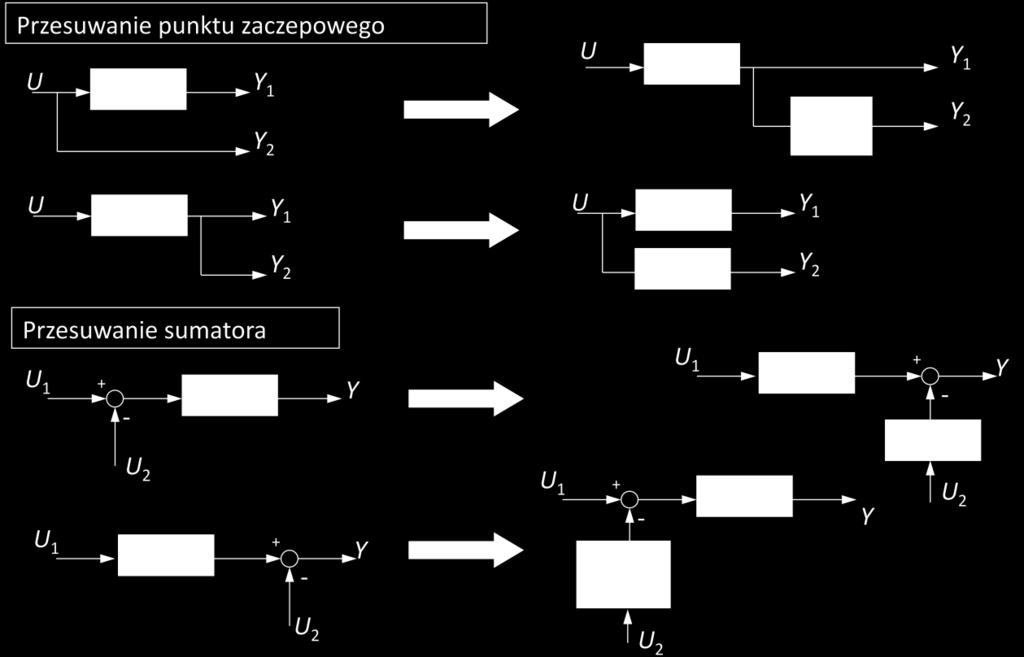
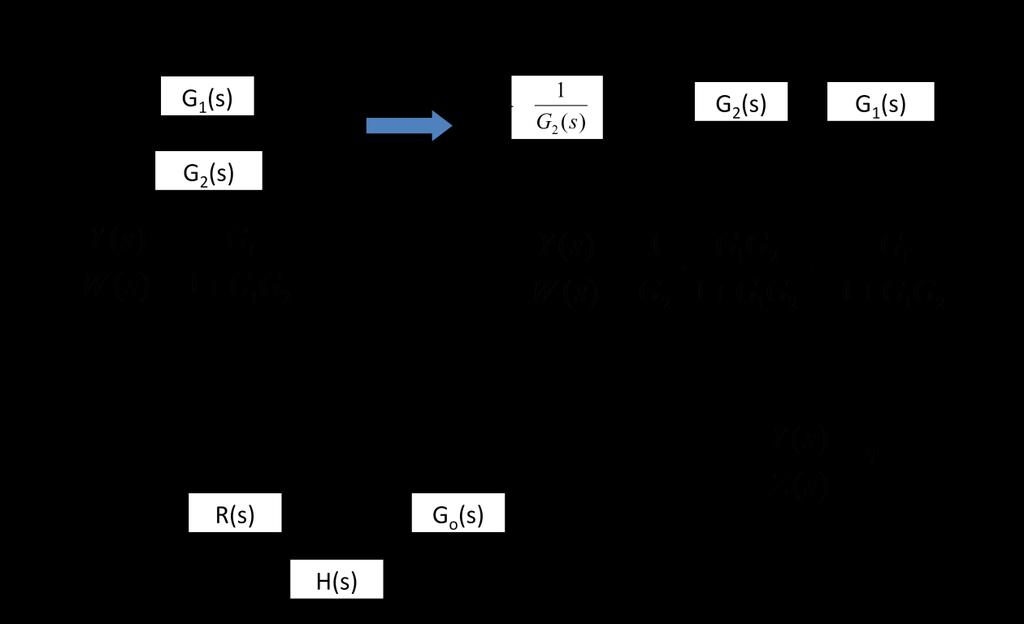
5 Pytanie: jaka będzie odpowiedź układu na wymuszenie skokowe o amplitudzie równej 2. Wyznacz wartość ustaloną odpowiedzi. 3. Schematy blokowe 5

6 6
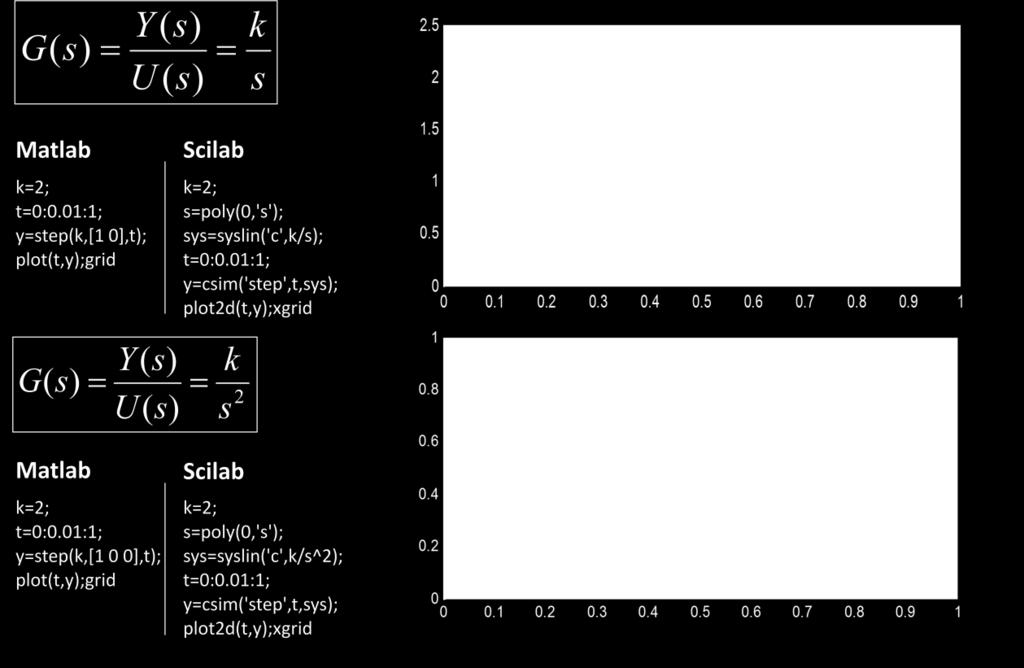
7 4. Wprowadzenie do pakietu Matlab/Scilab Podstawowe instrukcje - Matlab. Definiowanie wektora czasu t=0:0.:5; 2. Definiowanie transmitancji L=[a n a n- a a 0 ] M=[b n b n- b b 0 ] 3. Odpowiedź transmitancji na sygnał wejściowy w postaci skoku jednostkowego y=step(l,m,t); 4. Wykres plot(t,y); grid Analogiczne zadania można wykonać w nieodpłatnie dostępnym pakiecie Scilab ( Definiowanie wektora czasu t=[0:0.:5]; bądź t=0:0.:5; 7
8 2. Definiowanie transmitancji s=poly(0, s ); bądź s=%s sys=syslin( c,( )/( )); 3. Odpowiedź transmitancji na sygnał wejściowy w postaci skoku jednostkowego y=csim( step,t,sys); 4. Wykres plot2d(t,y); xgrid bądź plot(t,y); xgrid Przykłady 8
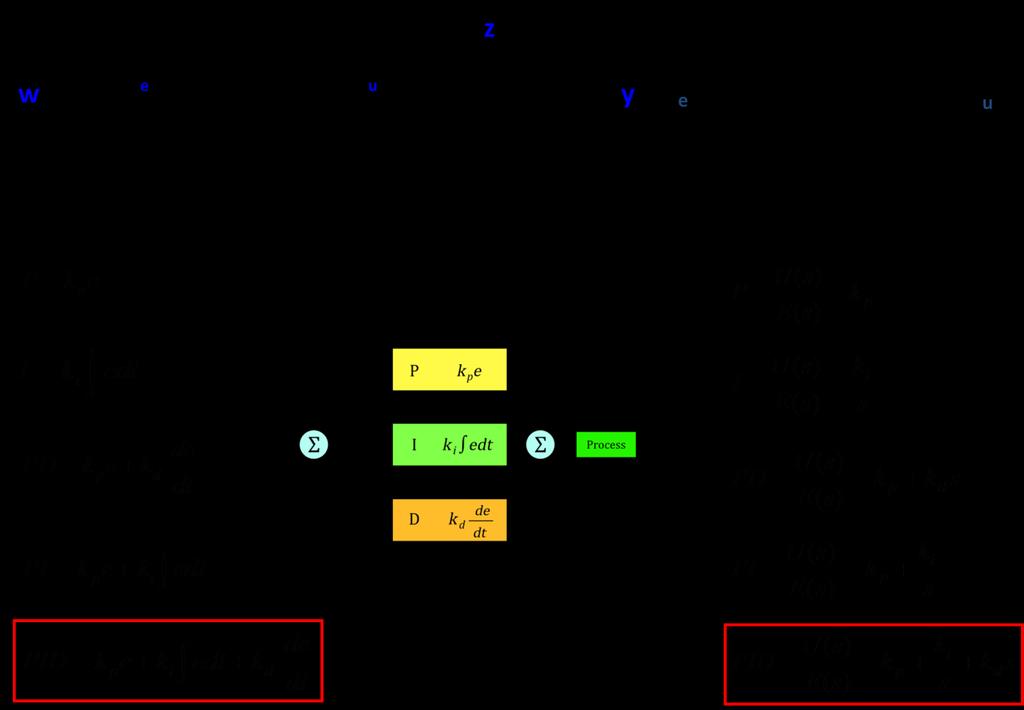
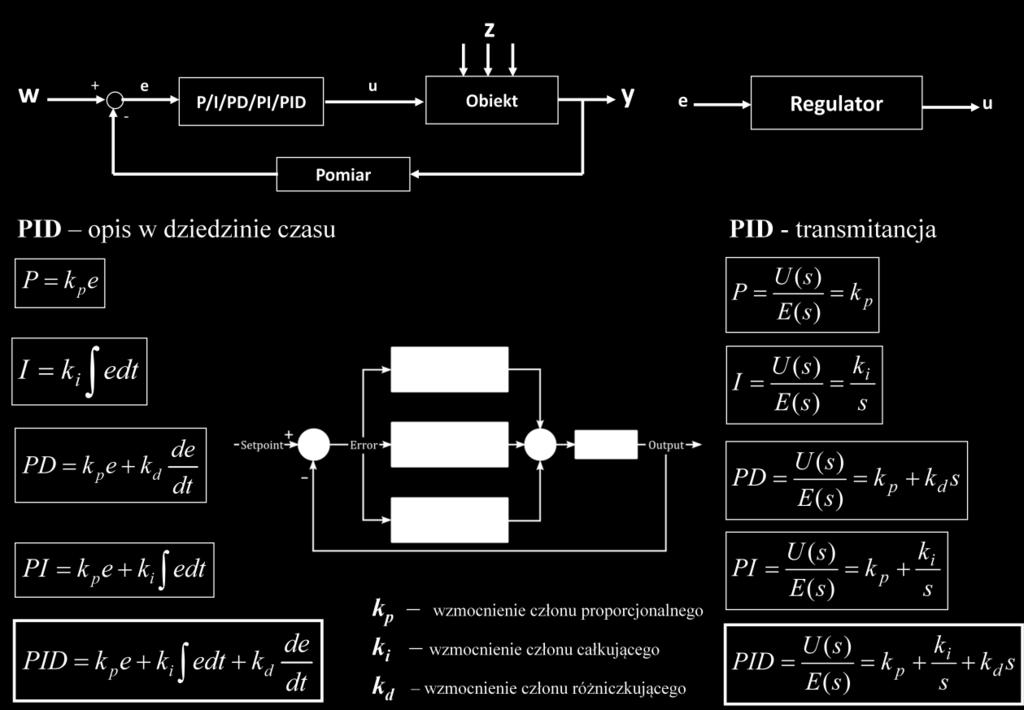
9 5. Regulatory PID transmitancje 9


, grid 2 0 -")
10 6. Modele matematyczne wybranych obiektów regulacji Zbiornik z pompą opróżniającą (bilans masy) q we q wy h A 5 Qwe ( s) Qwy( s) H( s) As 4 3 Matlab L = M = [2 0] t = 0:0.:0; y = step (L,M,t); L = - y = step(l,m,t); plot (t, y, r-,t,y, g-,t,y+y, b- ), grid
11 Zbiornik z wypływem pod ciśnieniem hydrostatycznym (bilans masy) h q we A Po linearyzacji (rozwinięcie w szereg Taylora) H s) we ( 2 k ( ) ( ) Q s k S s Ts s q wy Podgrzewacz elektryczny (bilans energii), c, V q T q, c, T 0 P,R, c, T u T ( s) U ( s) k Ts Opóźnienie transportowe w kotle rusztowym S u y u L v y L v Uwaga Transmitancje obiektów technologicznych (energetycznych, chemicznych i in.) należy zwykle uzupełnić o pewne opóźnienie, co daje: e s, e s, e s. 2 Ts Ts Ts Bardzo często wartość określa się eksperymentalnie.
12 Przybliżenie Padé e s 2 s ( s ) 2! 2 s ( s) 2! ( s )... 3! 3 ( s)... 3! Przykład Matlab instrukcja pade przybliżenie -go rzędu L=; M=[ ]; [Lp Mp]=pade(2,); Lz=conv(L,Lp); Mz=conv(M,Mp); t=0:0.0:2; y=step(lz,mz,t); plot(t,y);grid G( s) e 2s s Przykład Scilab aproksymacja opóźnienia - przybliżenie -go rzędu s=%s; sys= syslin('c',/(s+)); delay=syslin('c',(2-2*s)/(2+2*s)); sys=sys*delay; t=0:0.0:2; y=csim('step',t,sys); plot(t,y);xgrid Przykład Matlab instrukcja pade przybliżenie -go i 2-go rzędu L=; M=[ ]; [Lp Mp]=pade(2,); [Lp2 Mp2]=pade(2,2); Lz=conv(L,Lp); Mz=conv(M,Mp); Lz2=conv(L,Lp2); Mz2=conv(M,Mp2); t=0:0.0:2; y=step(lz,mz,t); y2=step(lz2,mz2,t); plot(t,y, r-,t,y2, b- );grid G( s) e 2s s
13 Silnik prądu stałego z magnesami trwałymi sterowanie napięciowe i R U J S N S U U s k s Ts s k s s( Ts ) Silnik prądu stałego z magnesami trwałymi sterowanie prądowe i s s U k s i R J S k s 2 s s U N S 3
Automatyka i Regulacja Automatyczna, PRz, r.a. 2011/2012, Żabiński Tomasz
 Wykład 8 Transformata Laplace a - przypomnienie, transmitancja operatorowa, scematy bloko, wprowadzenie do pakietu Matlab/Scilab, regulatory PID - transmitancja, modele matematyczne wybranyc obiektów regulacji,
Wykład 8 Transformata Laplace a - przypomnienie, transmitancja operatorowa, scematy bloko, wprowadzenie do pakietu Matlab/Scilab, regulatory PID - transmitancja, modele matematyczne wybranyc obiektów regulacji,
przy warunkach początkowych: 0 = 0, 0 = 0
 MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
3. WRAŻLIWOŚĆ I BŁĄD USTALONY. Podstawowe wzory. Wrażliwość Wrażliwość transmitancji względem parametru. parametry nominalne
 3. WRAŻLIWOŚĆ I BŁĄD USTALONY Podstawowe wzory Wrażliwość Wrażliwość transmitancji względem parametru (3.1a) parametry nominalne (3.1b) Wrażliwość układu zamkniętego (3.2a) (3.2b) Uwaga. Dla Zmiana odpowiedzi
3. WRAŻLIWOŚĆ I BŁĄD USTALONY Podstawowe wzory Wrażliwość Wrażliwość transmitancji względem parametru (3.1a) parametry nominalne (3.1b) Wrażliwość układu zamkniętego (3.2a) (3.2b) Uwaga. Dla Zmiana odpowiedzi
, (2.1) A powierzchnia przekroju zbiornika, Równanie bilansu masy cieczy w zbiorniku ma postać. , gdzie: q i dopływ,
 A powierzchnia przekroju zbiornika, Równanie bilansu masy cieczy w zbiorniku ma postać. , gdzie: q i dopływ,") 2. MODELE OBIEKTÓW STEROWANIA Równania bilansowe Bilans masy Bilans ten dotyczy wszelkich obiektów z przepływem cieczy, gazów, par, materiałów sypkich, takich jak zbiorniki, mieszalniki, kotły, reaktory
2. MODELE OBIEKTÓW STEROWANIA Równania bilansowe Bilans masy Bilans ten dotyczy wszelkich obiektów z przepływem cieczy, gazów, par, materiałów sypkich, takich jak zbiorniki, mieszalniki, kotły, reaktory
4. UKŁADY II RZĘDU. STABILNOŚĆ. Podstawowe wzory. Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat. Transmitancja układu zamkniętego
 4. UKŁADY II RZĘDU. STABILNOŚĆ Podstawowe wzory Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat (4.1) Transmitancja układu zamkniętego częstotliwość naturalna współczynnik tłumienia Odpowiedź
4. UKŁADY II RZĘDU. STABILNOŚĆ Podstawowe wzory Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat (4.1) Transmitancja układu zamkniętego częstotliwość naturalna współczynnik tłumienia Odpowiedź
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Przekształcenia całkowe. Wykład 1
 Przekształcenia całkowe Wykład 1 Przekształcenia całkowe Tematyka wykładów: 1. Liczby zespolone -wprowadzenie, - funkcja zespolona zmiennej rzeczywistej, - funkcja zespolona zmiennej zespolonej. 2. Przekształcenie
Przekształcenia całkowe Wykład 1 Przekształcenia całkowe Tematyka wykładów: 1. Liczby zespolone -wprowadzenie, - funkcja zespolona zmiennej rzeczywistej, - funkcja zespolona zmiennej zespolonej. 2. Przekształcenie
Plan wykładu. Własności statyczne i dynamiczne elementów automatyki:
 Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
Transmitancje układów ciągłych
 Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Teoria sterowania - studia niestacjonarne AiR 2 stopień
 Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT. Instrukcja do zajęc laboratoryjnych nr 6 AUTOMATYKA
 AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 6 AUTOMATYKA II rok Kierunek Transport Temat: Transmitancja operatorowa. Badanie odpowiedzi układów automatyki. Opracował
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 6 AUTOMATYKA II rok Kierunek Transport Temat: Transmitancja operatorowa. Badanie odpowiedzi układów automatyki. Opracował
FUNKCJE ZESPOLONE Lista zadań 2005/2006
 FUNKJE ZESPOLONE Lista zadań 25/26 Opracowanie: dr Jolanta Długosz Liczby zespolone. Obliczyć wartości podanych wyrażeń: (2 + ) ( ) 2 4 i (5 + i); b) (3 i)( 4 + 2i); c) 4 + i ; d) ( + i) 4 ; e) ( 2 + 3i)
FUNKJE ZESPOLONE Lista zadań 25/26 Opracowanie: dr Jolanta Długosz Liczby zespolone. Obliczyć wartości podanych wyrażeń: (2 + ) ( ) 2 4 i (5 + i); b) (3 i)( 4 + 2i); c) 4 + i ; d) ( + i) 4 ; e) ( 2 + 3i)
Część 1. Transmitancje i stabilność
 Część 1 Transmitancje i stabilność Zastosowanie opisu transmitancyjnego w projektowaniu przekształtników impulsowych Istotne jest przewidzenie wpływu zmian w warunkach pracy (m. in. v g, i) i wielkości
Część 1 Transmitancje i stabilność Zastosowanie opisu transmitancyjnego w projektowaniu przekształtników impulsowych Istotne jest przewidzenie wpływu zmian w warunkach pracy (m. in. v g, i) i wielkości
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Przeksztacenie Laplace a. Krzysztof Patan
 Przeksztacenie Laplace a Krzysztof Patan Wprowadzenie Transformata Fouriera popularna metoda opisu systemów w dziedzinie częstotliwości Transformata Fouriera umożliwia wykonanie wielu użytecznych czynności:
Przeksztacenie Laplace a Krzysztof Patan Wprowadzenie Transformata Fouriera popularna metoda opisu systemów w dziedzinie częstotliwości Transformata Fouriera umożliwia wykonanie wielu użytecznych czynności:
Tematyka egzaminu z Podstaw sterowania
 Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji
 Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji Opracowanie: mgr inż. Krystian Łygas, inż. Wojciech Danilczuk Na podstawie materiałów Prof. dr hab.
Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji Opracowanie: mgr inż. Krystian Łygas, inż. Wojciech Danilczuk Na podstawie materiałów Prof. dr hab.
pierwiastkowymi r(:,i) i-ta kolumna tablicy r z wartościami w II ćwiartce płaszczyzny (Re s, Im s) odpowiadająca linii
 i-ta kolumna tablicy r z wartościami w II ćwiartce płaszczyzny (Re s, Im s) odpowiadająca linii") 5. PROJEKTOWANIE METODĄ LINII PIERWIASTKOWYCH Regulator P Problem dane: szukane: Tok projektowania Linie pierwiastkowe dla Spośród nich wybiera się linię przecinającą prostą nachyloną pod kątem (do ujemnej
5. PROJEKTOWANIE METODĄ LINII PIERWIASTKOWYCH Regulator P Problem dane: szukane: Tok projektowania Linie pierwiastkowe dla Spośród nich wybiera się linię przecinającą prostą nachyloną pod kątem (do ujemnej
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Automatyzacja. Ćwiczenie 9. Transformata Laplace a sygnałów w układach automatycznej regulacji
 Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 10. Dyskretyzacja
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 10. Dyskretyzacja
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Przekształcenie Z. Krzysztof Patan
 Przekształcenie Z Krzysztof Patan Wprowadzenie Przekształcenie Laplace a można stosować do sygnałów i systemów czasu ciągłego W przypadku sygnałów czy systemów czasu dyskretnego do wyznaczenia transmitancji
Przekształcenie Z Krzysztof Patan Wprowadzenie Przekształcenie Laplace a można stosować do sygnałów i systemów czasu ciągłego W przypadku sygnałów czy systemów czasu dyskretnego do wyznaczenia transmitancji
LINIOWE UKŁADY DYSKRETNE
 LINIOWE UKŁADY DYSKRETNE Współczesne układy regulacji automatycznej wyposażone są w regulatory cyfrowe, co narzuca konieczność stosowania w ich analizie i syntezie odpowiednich równań dynamiki, opisujących
LINIOWE UKŁADY DYSKRETNE Współczesne układy regulacji automatycznej wyposażone są w regulatory cyfrowe, co narzuca konieczność stosowania w ich analizie i syntezie odpowiednich równań dynamiki, opisujących
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy środowiska Matlab
 Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Laboratorium Automatyki i Robotyki Podstawy środowiska Matlab Poniżej przedstawione jest użycie podstawowych poleceń w środowisku
Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Laboratorium Automatyki i Robotyki Podstawy środowiska Matlab Poniżej przedstawione jest użycie podstawowych poleceń w środowisku
Podstawy Automatyki. Wykład 2 - modelowanie matematyczne układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Stabilność. Krzysztof Patan
 Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Podstawy Automatyki. Wykład 2 - modelowanie matematyczne układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Podstawowe człony dynamiczne
 . Człon proporcjonalny 2. Człony całkujący idealny 3. Człon inercyjny Podstawowe człony dynamiczne charakterystyki czasowe = = = + 4. Człony całkujący rzeczywisty () = + 5. Człon różniczkujący rzeczywisty
. Człon proporcjonalny 2. Człony całkujący idealny 3. Człon inercyjny Podstawowe człony dynamiczne charakterystyki czasowe = = = + 4. Człony całkujący rzeczywisty () = + 5. Człon różniczkujący rzeczywisty
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, Spis treści
 Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, 2013 Spis treści Słowo wstępne 8 Wymagania egzaminacyjne 9 Wykaz symboli graficznych 10 Lekcja 1. Podstawowe prawa
Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, 2013 Spis treści Słowo wstępne 8 Wymagania egzaminacyjne 9 Wykaz symboli graficznych 10 Lekcja 1. Podstawowe prawa
METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ
 METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ Wykład 6 Transformata Laplace a Funkcje specjalne Przekształcenia całkowe W wielu zastosowaniach dużą rolę odgrywają tzw. przekształcenia całkowe
METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ Wykład 6 Transformata Laplace a Funkcje specjalne Przekształcenia całkowe W wielu zastosowaniach dużą rolę odgrywają tzw. przekształcenia całkowe
analogowego regulatora PID doboru jego nastaw i przetransformowanie go na cyfrowy regulator PID, postępując według następujących podpunktów:
 Cel projektu. Projekt składa się z dwóch podstawowych zadań, mających na celu zaprojektowanie dla danej transmitancji: G( s) = m 2 s 2 e + m s + sτ gdzie wartości m 2 = 27, m = 2, a τ = 4. G( s) = 27s
Cel projektu. Projekt składa się z dwóch podstawowych zadań, mających na celu zaprojektowanie dla danej transmitancji: G( s) = m 2 s 2 e + m s + sτ gdzie wartości m 2 = 27, m = 2, a τ = 4. G( s) = 27s
K p. K o G o (s) METODY DOBORU NASTAW Metoda linii pierwiastkowych Metody analityczne Metoda linii pierwiastkowych
 METODY DOBORU NASTAW Metoda linii pierwiastkowych Metody analityczne Metoda linii pierwiastkowych") METODY DOBORU NASTAW 7.3.. Metody analityczne 7.3.. Metoda linii pierwiastkowych 7.3.2 Metody doświadczalne 7.3.2.. Metoda Zieglera- Nicholsa 7.3.2.2. Wzmocnienie krytyczne 7.3.. Metoda linii pierwiastkowych
METODY DOBORU NASTAW 7.3.. Metody analityczne 7.3.. Metoda linii pierwiastkowych 7.3.2 Metody doświadczalne 7.3.2.. Metoda Zieglera- Nicholsa 7.3.2.2. Wzmocnienie krytyczne 7.3.. Metoda linii pierwiastkowych
Systemy. Krzysztof Patan
 Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Podstawy Automatyki. Wykład 2 - matematyczne modelowanie układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - matematyczne modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - matematyczne modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
PAiTM. materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż.
 PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
Ćwiczenie nr 6 Charakterystyki częstotliwościowe
 Wstęp teoretyczny Ćwiczenie nr 6 Charakterystyki częstotliwościowe 1 Cel ćwiczenia Celem ćwiczenia jest wyznaczenie charakterystyk częstotliwościowych układu regulacji oraz korekta nastaw regulatora na
Wstęp teoretyczny Ćwiczenie nr 6 Charakterystyki częstotliwościowe 1 Cel ćwiczenia Celem ćwiczenia jest wyznaczenie charakterystyk częstotliwościowych układu regulacji oraz korekta nastaw regulatora na
Badanie stabilności liniowych układów sterowania
 Badanie stabilności liniowych układów sterowania ver. 26.2-6 (26-2-7 4:6). Badanie stabilności liniowych układów sterowania poprzez analizę równania charakterystycznego. Układ zamknięty liniowy i stacjonarny
Badanie stabilności liniowych układów sterowania ver. 26.2-6 (26-2-7 4:6). Badanie stabilności liniowych układów sterowania poprzez analizę równania charakterystycznego. Układ zamknięty liniowy i stacjonarny
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Technologie informatyczne Wprowadzenie do Simulinka w środowisku MATLAB Pytania i zadania do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Technologie informatyczne Wprowadzenie do Simulinka w środowisku MATLAB Pytania i zadania do ćwiczeń laboratoryjnych
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transform
 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych
 Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 3. Charakterystyki
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 3. Charakterystyki
ZASTOSOWANIA PRZEKSZTAŁCENIA ZET
 CPS - - ZASTOSOWANIA PRZEKSZTAŁCENIA ZET Rozwiązywanie równań różnicowych Dyskretny system liniowy-stacjonarny można opisać równaniem różnicowym w postaci ogólnej N M aky[ n k] bkx[ n k] k k Przekształcenie
CPS - - ZASTOSOWANIA PRZEKSZTAŁCENIA ZET Rozwiązywanie równań różnicowych Dyskretny system liniowy-stacjonarny można opisać równaniem różnicowym w postaci ogólnej N M aky[ n k] bkx[ n k] k k Przekształcenie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
Inteligentnych Systemów Sterowania
 Laboratorium Inteligentnych Systemów Sterowania Mariusz Nowak Instytut Informatyki Politechnika Poznańska ver. 200.04-0 Poznań, 2009-200 Spis treści. Układ regulacji automatycznej z regulatorami klasycznymi
Laboratorium Inteligentnych Systemów Sterowania Mariusz Nowak Instytut Informatyki Politechnika Poznańska ver. 200.04-0 Poznań, 2009-200 Spis treści. Układ regulacji automatycznej z regulatorami klasycznymi
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 3 BADANIE CHARAKTERYSTYK CZASOWYCH LINIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia są pomiary i analiza
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 3 BADANIE CHARAKTERYSTYK CZASOWYCH LINIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia są pomiary i analiza
Układ regulacji automatycznej (URA) kryteria stabilności
 kryteria stabilności") Układ regulacji automatycznej (URA) kryteria stabilności y o e G c (s) z z 2 u G o (s) y () = () ()() () H(s) oraz jego wartością w stanie ustalonym. Transmitancja układu otwartego regulacji: - () = ()
Układ regulacji automatycznej (URA) kryteria stabilności y o e G c (s) z z 2 u G o (s) y () = () ()() () H(s) oraz jego wartością w stanie ustalonym. Transmitancja układu otwartego regulacji: - () = ()
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Część 2 Analiza obwodów w stanie ustalonym przy wymuszeniu sinusoidalnym Przypomnienie ostatniego wykładu Prąd i napięcie Podstawowe
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Część 2 Analiza obwodów w stanie ustalonym przy wymuszeniu sinusoidalnym Przypomnienie ostatniego wykładu Prąd i napięcie Podstawowe
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
PODSTAWOWE CZŁONY DYNAMICZNE
 PODSTAWOWE CZŁONY DYNAMICZNE Człon podstawowy jest to element przetwarzający wprowadzony do niego sygnał wejściowy x(t) na sygnał wyjściowy y(t) w sposób elementarny. Przetwarzanie elementarne oznacza,
PODSTAWOWE CZŁONY DYNAMICZNE Człon podstawowy jest to element przetwarzający wprowadzony do niego sygnał wejściowy x(t) na sygnał wyjściowy y(t) w sposób elementarny. Przetwarzanie elementarne oznacza,
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 2. REPREZENTACJA
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 2. REPREZENTACJA
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Rodzaj przedmiotu: przedmiot obowiązkowy dla wszystkich specjalności Rodzaj zajęć: wykład, ćwiczenia Analiza zespolona Complex Analysis Matematyka Poziom kwalifikacji: II stopnia
Nazwa przedmiotu: Kierunek: Rodzaj przedmiotu: przedmiot obowiązkowy dla wszystkich specjalności Rodzaj zajęć: wykład, ćwiczenia Analiza zespolona Complex Analysis Matematyka Poziom kwalifikacji: II stopnia
Rozdział 2. Liczby zespolone
 Rozdział Liczby zespolone Zbiór C = R z działaniami + oraz określonymi poniżej: x 1, y 1 ) + x, y ) := x 1 + x, y 1 + y ), 1) x 1, y 1 ) x, y ) := x 1 x y 1 y, x 1 y + x y 1 ) ) jest ciałem zob rozdział
Rozdział Liczby zespolone Zbiór C = R z działaniami + oraz określonymi poniżej: x 1, y 1 ) + x, y ) := x 1 + x, y 1 + y ), 1) x 1, y 1 ) x, y ) := x 1 x y 1 y, x 1 y + x y 1 ) ) jest ciałem zob rozdział
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Funkcje zespolone Complex functions Kierunek: Rodzaj przedmiotu: obowiązkowy dla wszystkich specjalności Rodzaj zajęć: wykład, ćwiczenia Matematyka Poziom kwalifikacji: I stopnia Liczba
Nazwa przedmiotu: Funkcje zespolone Complex functions Kierunek: Rodzaj przedmiotu: obowiązkowy dla wszystkich specjalności Rodzaj zajęć: wykład, ćwiczenia Matematyka Poziom kwalifikacji: I stopnia Liczba
Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych prof. dr hab. inż.
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych prof. dr hab. inż.
AUTOMATYKA. Materiały dydaktyczne dotyczące zagadnień przewidzianych w I pracy kontrolnej
 Dr inż. Michał Chłędowski AUTOMATYKA Materiały dydaktyczne dotyczące zagadnień przewidzianych w I pracy kontrolnej Zakres tematyczny: Podstawowe człony automatyki, opis własności statycznych i dynamicznych,
Dr inż. Michał Chłędowski AUTOMATYKA Materiały dydaktyczne dotyczące zagadnień przewidzianych w I pracy kontrolnej Zakres tematyczny: Podstawowe człony automatyki, opis własności statycznych i dynamicznych,
Zadania zaliczeniowe z Automatyki i Robotyki dla studentów III roku Inżynierii Biomedycznej Politechniki Lubelskiej
 Zadania zaliczeniowe z Automatyki i Robotyki dla studentów III roku Inżynierii Biomedycznej Politechniki Lubelskiej Rozwiązane zadania należy dostarczyć do prowadzącego w formie wydruku lub w formie odręcznego
Zadania zaliczeniowe z Automatyki i Robotyki dla studentów III roku Inżynierii Biomedycznej Politechniki Lubelskiej Rozwiązane zadania należy dostarczyć do prowadzącego w formie wydruku lub w formie odręcznego
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Techniki regulacji automatycznej
 Techniki regulacji automatycznej Metoda linii pierwiastkowych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 25 Plan wykładu Podstawy metody linii pierwiastkowych
Techniki regulacji automatycznej Metoda linii pierwiastkowych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 25 Plan wykładu Podstawy metody linii pierwiastkowych
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 7 BADANIE ODPOWIEDZI USTALONEJ NA OKRESOWY CIĄG IMPULSÓW 1. Cel ćwiczenia Obserwacja przebiegów wyjściowych
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 7 BADANIE ODPOWIEDZI USTALONEJ NA OKRESOWY CIĄG IMPULSÓW 1. Cel ćwiczenia Obserwacja przebiegów wyjściowych
Wykład 7 Transformata Laplace a oraz jej wykorzystanie w analizie stanu nieustalonego metodą operatorową część II
 Wykład 7 Transformata aplace a oraz jej wykorzystanie w analizie stanu nieustalonego metodą operatorową część II Prowadzący: dr inż. Tomasz Sikorski Instytut Podstaw lektrotechniki i lektrotechnologii
Wykład 7 Transformata aplace a oraz jej wykorzystanie w analizie stanu nieustalonego metodą operatorową część II Prowadzący: dr inż. Tomasz Sikorski Instytut Podstaw lektrotechniki i lektrotechnologii
A-2. Filtry bierne. wersja
 wersja 04 2014 1. Zakres ćwiczenia Celem ćwiczenia jest zrozumienie propagacji sygnałów zmiennych w czasie przez układy filtracji oparte na elementach rezystancyjno-pojemnościowych. Wyznaczenie doświadczalne
wersja 04 2014 1. Zakres ćwiczenia Celem ćwiczenia jest zrozumienie propagacji sygnałów zmiennych w czasie przez układy filtracji oparte na elementach rezystancyjno-pojemnościowych. Wyznaczenie doświadczalne
6. FUNKCJE. f: X Y, y = f(x).
.") 6. FUNKCJE Niech dane będą dwa niepuste zbiory X i Y. Funkcją f odwzorowującą zbiór X w zbiór Y nazywamy przyporządkowanie każdemu elementowi X dokładnie jednego elementu y Y. Zapisujemy to następująco
6. FUNKCJE Niech dane będą dwa niepuste zbiory X i Y. Funkcją f odwzorowującą zbiór X w zbiór Y nazywamy przyporządkowanie każdemu elementowi X dokładnie jednego elementu y Y. Zapisujemy to następująco
Automatyka i Sterowanie Laboratorium Zagadnienia (aktualizacja )
") Tomasz Żabiński Ocena 3.0 Automatyka i Sterowanie Laboratorium Zagadnienia (aktualizacja 24.05.2012) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne.
Tomasz Żabiński Ocena 3.0 Automatyka i Sterowanie Laboratorium Zagadnienia (aktualizacja 24.05.2012) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne.
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Rozwiązywanie równań różniczkowych z niezerowymi warunkami początkowymi
 . Cele ćwiczenia Laboratorium nr Rozwiązywanie równań różniczkowych z niezerowymi warunkami początkowymi zapoznanie się z metodami symbolicznego i numerycznego rozwiązywania równań różniczkowych w Matlabie,
. Cele ćwiczenia Laboratorium nr Rozwiązywanie równań różniczkowych z niezerowymi warunkami początkowymi zapoznanie się z metodami symbolicznego i numerycznego rozwiązywania równań różniczkowych w Matlabie,
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Technika regulacji automatycznej
 Technika regulacji automatycznej Wykład 2 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 56 Plan wykładu Schematy strukturalne Podstawowe operacje na schematach
Technika regulacji automatycznej Wykład 2 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 56 Plan wykładu Schematy strukturalne Podstawowe operacje na schematach
Automatyka i robotyka
 Automatyka i robotyka Wykład 1 - Wprowadzenie do automatyki Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu Podstawowe informacje Wprowadzenie
Automatyka i robotyka Wykład 1 - Wprowadzenie do automatyki Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu Podstawowe informacje Wprowadzenie
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 7. Metoda projektowania
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 7. Metoda projektowania
Przekształcanie schematów blokowych. Podczas ćwiczenia poruszane będą następujące zagadnienia:
 Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Kompensator PID. 1 sω z 1 ω. G cm. aby nie zmienić częstotliwości odcięcia f L. =G c0. s =G cm. G c. f c. /10=500 Hz aby nie zmniejszyć zapasu fazy
 Kompensator PID G c s =G cm sω z ω L s s ω p G cm =G c0 aby nie zmienić częstotliwości odcięcia f L f c /0=500 Hz aby nie zmniejszyć zapasu fazy Łukasz Starzak, Sterowanie przekształtników elektronicznych,
Kompensator PID G c s =G cm sω z ω L s s ω p G cm =G c0 aby nie zmienić częstotliwości odcięcia f L f c /0=500 Hz aby nie zmniejszyć zapasu fazy Łukasz Starzak, Sterowanie przekształtników elektronicznych,
Komputerowo wspomagane projektowanie systemów sterowania
 Komputerowo wspomagane projektowanie systemów sterowania OCENA KOŃCOWA: F1 ocena z laboratorium (sprawozdania z ćwiczeń laboratoryjnych) F2 kolokwium pisemne z wykładu (dopuszczeniowe) F3 egzamin pisemny
Komputerowo wspomagane projektowanie systemów sterowania OCENA KOŃCOWA: F1 ocena z laboratorium (sprawozdania z ćwiczeń laboratoryjnych) F2 kolokwium pisemne z wykładu (dopuszczeniowe) F3 egzamin pisemny
Opis matematyczny. Równanie modulatora. Charakterystyka statyczna. Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy. dla 0 v c.
 Opis matematyczny Równanie modulatora Charakterystyka statyczna d t = v c t V M dla 0 v c t V M D 1 V M V c Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy v c (t )=V c + v c (t ) d (t
Opis matematyczny Równanie modulatora Charakterystyka statyczna d t = v c t V M dla 0 v c t V M D 1 V M V c Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy v c (t )=V c + v c (t ) d (t
Regulator P (proporcjonalny)
") Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
Projektowanie układów regulacji w dziedzinie częstotliwości. dr hab. inż. Krzysztof Patan, prof. PWSZ
 Projektowanie układów regulacji w dziedzinie częstotliwości dr hab. inż. Krzysztof Patan, prof. PWSZ Wprowadzenie Metody projektowania w dziedzinie częstotliwości mają wiele zalet: stabilność i wymagania
Projektowanie układów regulacji w dziedzinie częstotliwości dr hab. inż. Krzysztof Patan, prof. PWSZ Wprowadzenie Metody projektowania w dziedzinie częstotliwości mają wiele zalet: stabilność i wymagania
Zaliczenie - zagadnienia (aktualizacja )
") Tomasz Żabiński Ocena 3.0 Zaliczenie - zagadnienia (aktualizacja 23.01.2017) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne. 3. Scharakteryzuj
Tomasz Żabiński Ocena 3.0 Zaliczenie - zagadnienia (aktualizacja 23.01.2017) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne. 3. Scharakteryzuj
Transformata Laplace a to przekształcenie całkowe funkcji f(t) opisane następującym wzorem:
 opisane następującym wzorem:") PPS 2 kartkówka 1 RÓWNANIE RÓŻNICOWE Jest to dyskretny odpowiednik równania różniczkowego. Równania różnicowe to pewne związki rekurencyjne określające w sposób niebezpośredni wartość danego wyrazu ciągu.
PPS 2 kartkówka 1 RÓWNANIE RÓŻNICOWE Jest to dyskretny odpowiednik równania różniczkowego. Równania różnicowe to pewne związki rekurencyjne określające w sposób niebezpośredni wartość danego wyrazu ciągu.
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
4. Właściwości eksploatacyjne układów regulacji Wprowadzenie. Hs () Ys () Ws () Es () Go () s. Vs ()
 Ys () Ws () Es () Go () s. Vs ()") 4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
1. Liczby zespolone. Jacek Jędrzejewski 2011/2012
 1. Liczby zespolone Jacek Jędrzejewski 2011/2012 Spis treści 1 Liczby zespolone 2 1.1 Definicja liczby zespolonej.................... 2 1.2 Postać kanoniczna liczby zespolonej............... 1. Postać
1. Liczby zespolone Jacek Jędrzejewski 2011/2012 Spis treści 1 Liczby zespolone 2 1.1 Definicja liczby zespolonej.................... 2 1.2 Postać kanoniczna liczby zespolonej............... 1. Postać
Kurs wyrównawczy - teoria funkcji holomorficznych
 Kurs wyrównawczy - teoria funkcji holomorficznych wykład 1 Gniewomir Sarbicki 15 lutego 2011 Struktura ciała Zbiór par liczb rzeczywistych wyposażamy w działania: { + : (a, b) + (c, d) = (a + c, b + d)
Kurs wyrównawczy - teoria funkcji holomorficznych wykład 1 Gniewomir Sarbicki 15 lutego 2011 Struktura ciała Zbiór par liczb rzeczywistych wyposażamy w działania: { + : (a, b) + (c, d) = (a + c, b + d)
Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera
 Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera Arkadiusz Syta A. Syta (Politechnika Lubelska) 1 / 19 Wstęp Przegląd wybranych pakietów oprogramowania i funkcji Rozwiązywanie równań
Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera Arkadiusz Syta A. Syta (Politechnika Lubelska) 1 / 19 Wstęp Przegląd wybranych pakietów oprogramowania i funkcji Rozwiązywanie równań
Instrukcja do laboratorium z cyfrowego przetwarzania sygnałów. Ćwiczenie 3. Transformata Z; blokowe struktury opisujące filtr
 Instrukcja do laboratorium z cyfrowego przetwarzania sygnałów Ćwiczenie Transformata ; blokowe struktury opisujące filtr Przemysław Korohoda, KE, AGH awartość instrukcji: Materiał z zakresu DSP. Transformata.2
Instrukcja do laboratorium z cyfrowego przetwarzania sygnałów Ćwiczenie Transformata ; blokowe struktury opisujące filtr Przemysław Korohoda, KE, AGH awartość instrukcji: Materiał z zakresu DSP. Transformata.2
Podstawy inżynierii sterowania Ćwiczenia laboratoryjne
 Podstawy inżynierii sterowania Ćwiczenia laboratoryjne Laboratorium nr 4: Układ sterowania silnika obcowzbudnego prądu stałego z regulatorem PID 1. Wprowadzenie Przedmiotem rozważań jest układ automatycznej
Podstawy inżynierii sterowania Ćwiczenia laboratoryjne Laboratorium nr 4: Układ sterowania silnika obcowzbudnego prądu stałego z regulatorem PID 1. Wprowadzenie Przedmiotem rozważań jest układ automatycznej
Matematyka 2. Metoda operatorowa Transformata Laplace a
 Matematyka 2 Metoda operatorowa Transformata Laplace a Literatura M.Gewert, Z.Skoczylas; Równania różniczkowe zwyczajne; Oficyna Wydawnicza GiS, Wrocław, 1999 D.Mozyrska, E.Pawłuszewicz, R.Stasiewicz;
Matematyka 2 Metoda operatorowa Transformata Laplace a Literatura M.Gewert, Z.Skoczylas; Równania różniczkowe zwyczajne; Oficyna Wydawnicza GiS, Wrocław, 1999 D.Mozyrska, E.Pawłuszewicz, R.Stasiewicz;
Dynamika układów podstawy analizy i symulacji. IV. Układy wielowymiarowe (MIMO)
") 10. Układ równań różniczkowych 10.1. Wprowadzenie - układ równań stanu IV. Układy wielowymiarowe (MIMO 10.1.1. Obiekty SISO i MIMO Modele dynamiki układów analizowane w części III miały postać pojedynczego
10. Układ równań różniczkowych 10.1. Wprowadzenie - układ równań stanu IV. Układy wielowymiarowe (MIMO 10.1.1. Obiekty SISO i MIMO Modele dynamiki układów analizowane w części III miały postać pojedynczego
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie. Sterowanie ciągłe. Teoria sterowania układów jednowymiarowych
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Sterowanie ciągłe Teoria sterowania układów jednowymiarowych 1 Informacja o prowadzących zajęcia Studia stacjonarne rok II Automatyka i Robotyka
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Sterowanie ciągłe Teoria sterowania układów jednowymiarowych 1 Informacja o prowadzących zajęcia Studia stacjonarne rok II Automatyka i Robotyka
KRYTERIA ALGEBRAICZNE STABILNOŚCI UKŁADÓW LINIOWYCH
 KRYTERIA ALEBRAICZNE STABILNOŚCI UKŁADÓW LINIOWYCH Zadie 1 Problem: Zbadać stabilność układu zamkniętego przedstawionego na schemacie według kryterium Hurwitza. 1 (s) (s) Rys 1. Schemat układu regulacji
KRYTERIA ALEBRAICZNE STABILNOŚCI UKŁADÓW LINIOWYCH Zadie 1 Problem: Zbadać stabilność układu zamkniętego przedstawionego na schemacie według kryterium Hurwitza. 1 (s) (s) Rys 1. Schemat układu regulacji
Rozwiązywanie równań liniowych. Transmitancja. Charakterystyki częstotliwościowe
 Zał. nr do ZW 33/01 WYDZIAŁ Informatyki i Zarządzania / STUDIUM KARTA PRZEDMIOTU Nazwa w języku polskim Modele systemów dynamicznych Nazwa w języku angielskim Dynamic Systems Models. Kierunek studiów (jeśli
Zał. nr do ZW 33/01 WYDZIAŁ Informatyki i Zarządzania / STUDIUM KARTA PRZEDMIOTU Nazwa w języku polskim Modele systemów dynamicznych Nazwa w języku angielskim Dynamic Systems Models. Kierunek studiów (jeśli
WYDZIAŁ MECHANICZNY PWR KARTA PRZEDMIOTU
 WYDZIAŁ MECHANICZNY PWR KARTA PRZEDMIOTU Zał. nr 4 do ZW Nazwa w języku polskim: FUNKCJE ZESPOLONE Nazwa w języku angielskim: Complex functions Kierunek studiów (jeśli dotyczy): Automatyka i Robotyka Specjalność
WYDZIAŁ MECHANICZNY PWR KARTA PRZEDMIOTU Zał. nr 4 do ZW Nazwa w języku polskim: FUNKCJE ZESPOLONE Nazwa w języku angielskim: Complex functions Kierunek studiów (jeśli dotyczy): Automatyka i Robotyka Specjalność
Inżynieria Systemów Dynamicznych (5)
") Inżynieria Systemów Dynamicznych (5) Dokładność Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 DOKŁAD 2 Uchyb Podstawowy strukturalny
Inżynieria Systemów Dynamicznych (5) Dokładność Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 DOKŁAD 2 Uchyb Podstawowy strukturalny