Kinematyka: opis ruchu
|
|
|
- Marian Malinowski
- 8 lat temu
- Przeglądów:
Transkrypt
1 Kinematyka: opis ruchu Pojęcia podstawowe Punkt materialny Ciało, którego rozmiary można w danym zagadnieniu zaniedbać. Zazwyczaj przyjmujemy, że punkt materialny powinien być dostatecznie mały. Nie jest to jednak konieczne! Przykłady: wagon kolejowy na torach albo "wózek" na torze powietrznym. Ważne jest, żeby ciało nie miało dodatkowych "stopni swobody" (np. obroty, drgania własne, stany wzbudzone). Położenie punktu materialnego całkowicie określa jego "stan". pojęcie punktu materialnego umożliwia prosty opis wielu sytuacji fizycznych. Naogół przyjmujemy, że punkt materialny obdarzony jest masą. Ruch Zmiana położenia ciała względem wybranego układu odniesienia. Z punktu widzenia fizyki nie możemy nic powiedzieć o ruchu obserwowanego ciała póki nie odniesiemy go do jakiegoś innego obiektu. Oczywiście sami możemy uznać się za właściwy układ odniesienia, ale jest to wybór, który może istotnie wpłynąć na opisywany ruch Układ odniesienia Musimy wybrać ciało, które potraktujemy jako "punkt odniesienia". Najczęściej jest nim Ziemia Układ odniesienia można też zdefiniować określając jego położenie (lub ruch) względem wybranego ciała lub grupy ciał. Przykład: układ środka masy zderzających się cząstek układ związany ze środkiem Galaktyki
2 Układ współrzędnych Układ współrzędnych Służy do określenia położenia ciała w danym układzie odniesienia. Położenie możemy zapisać na wiele różnych sposobów: układ współrzędnych kartezjańskich: układ współrzędnych biegunowych: układ współrzędnych walcowych: Tor ruchu Tor ruchu Opisuje zmianę położenia ciała w czasie. W ogólnym przypadku tor zapisujemy w tzw. postaci parametrycznej:
3 Wektor położenia ciała (wszystkie jego współrzędne) wyrażamy jako funkcje czasu. W szczególnych przypadkach możliwe jest odwrócenie jednej z zależności, na przykład: Gdy czas wyrazimy jako funkcję współrzędnej możemy uzyskać postać uwikłaną toru: Funkcje W fizyce bardzo często staramy się opisać zależności pomiędzy różnymi wielkościami w postaci funkcyjnej. Na ogół do oznaczania funkcji używamy symbolu odpowiadającego danej wielkości fizycznej, np.: droga s, wysokość h, prędkość v Postać funkcyjna zależy jednak od wyboru argumentu funkcji! W przypadku opisu toru należy zauważyć, że i to dwie różne funkcje(!) choć opisują tą samą wielkość fizyczną. Prędkość średnia Prędkość średnia W odstępie czasu: punkt materialny przemieścił się o:


4 Prędkość średnią definiujemy jako Prędkość chwilowa Praktycznie każdy pomiar prędkości musi trwać skończony okres czasu. Prawie zawsze mierzymy więc prędkość średnią. Prędkość chwilowa Pojęcie prędkości chwilowej wprowadzamy jako graniczną wartość prędkości średniej dla nieskończenie krótkiego czasu pomiaru, : Matematycznie odpowiada to definicji pochodnej: Pochodna wektora wektor pochodnych składowych tego wektora Wartość prędkości: Wektor prędkości chwilowej jest zawsze styczny do toru! Przyspieszenie średnie Przyspieszenie średnie W odstępie czasu prędkość zmienia się o:

5 Przyspieszenie średnie definiujemy (podobnie jak prędkość średnią) jako stosunek przyrostu prędkości do odstępu czasu: Przyspieszenie chwilowe Przyspieszenie chwilowe Podobnie jak w przypadku prędkości, przyspieszenie chwilowe definiujemy jako graniczną wartość przyspieszenia średniego dla nieskończenie krótkiego przedziału czasu: Przyspieszenie chwilowe jest pochodną po czasie prędkości chwilowej: Przyspieszenie opisuje "tempo" zmian prędkości Klasyfikacja ruchów Ze względu na tor Tor ruchu ciała może zakreślać dowolną krzywą w przestrzeni. W wielu zagadnieniach mamy jednak do czynienia z torem, który jest dodatkowo ograniczony przez symetrię zagadnienia lub warunki początkowe. Najchętniej zajmujemy się właśnie takimi przypadkami. W szczególności tor może być: prostoliniowy, odbywający się wzdłuż lini prostej Zawsze możemy tak wybrać układ
6 współrzędnych aby płaski, odbywający się w ustalonej płaszczyźnie Możemy tak wybrać układ współrzędnych aby po okręgu Ze względu na przyspieszenie jednostajny wartość prędkości pozostaje stała: = const jednostajnie przyspieszony przyspieszenie jest stałe: = const Ruch jednostajny prostoliniowy Najprostszy możliwy przypadek ruchu: * Jednostajny: = const * Prostoliniowy: = const Prędkość w ruchu jednostajnym prostoliniowym Wektor prędkości jest stały (nie zmienia wartości ani kierunku) czyli nie ma przyspieszenia. Przyjmując, że ruch odbywa się wzdłuż osi X:

7 Położenie (przebyta droga) jest liniową funkcją czasu. Drogi przebyte w równych odcinkach czasu są sobie równe. Ruch prostoliniowy Zależność drogi od prędkości Wyznaczanie drogi z zależności prędkości od czasu Przypadek ogólny ruchu prostoliniowego: znamy prędkość czy możemy wyznaczyć zależność położenia od czasu? Możemy sumować przesunięcia po krótkich przedziałach czasu. Przesunięcie ciała w czasie : Przechodząc do granicy : Zależność położenia od czasu wyraża się przez całkę oznaczoną. Pojęcie całki oznaczonej ma bardzo prostą interpretację graficzną: jest to pole pod krzywą zależności prędkości od czasu. Ruch jednostajnie przyspieszony Jednostajnie przyspieszony zdefiniowany jest poprzez warunek: = const Przyspieszenie opisuje zależność prędkości od czasu. Jeśli przyspieszenie jest stałe to prędkość musi rosnąć liniowo z czasem:


8 Ruch jednostajnie przyspieszony prostoliniowy Jaki warunek musi być spełniony, żeby ruch jednostajnie przyspieszony był prostoliniowy? Ruch jest prostoliniowy wtedy gdy kierunek prędkości jest stały: = const = const Aby ruch był prostoliniowy przyspieszenie musi mieć kierunek zgodny z kierunkiem prędkości. Ruch prostoliniowy można opisać jako ruch jednowymiarowy wybierając oś układu odniesienia wzdłuż kierunku ruchu Przyspieszenie w ruchu jednostajnie przyspieszonym Prędkość jest liniową funkcją czasu: Prędkość w ruchu jednostajnie

9 przyspieszonym Położenie jest kwadratową funkcją czasu: Przyjmijmy, że w chwili ciało spoczywa:. Mierzymy drogę jaką ciało przebywa w równych przedziałach czasu: Przebyta droga: Uzyskujemy uniwersalną relację opisującą ruch jednostajnie przyspieszony prostoliniowy: Drogi w kolejnych odcinkach czasu mają się do siebie jak kolejne liczby nieparzyste: Przypadek ogólny W ogólnym przypadku ruch jednostajnie przyspieszony nie jest prostoliniowy. Ruch będzie się odbywał w płaszczyźnie przechodzącej przez wektorów i. i wyznaczonej przez kierunki
10 Możemy wybrać układ współrzędnych tak aby: Ruch w przestrzeni można wtedy opisać jako złożenie: ruch jednostajnego (w kierunku osi X) ruchu jednostajnie przyspieszonego (Y) spoczynku (Z): Formalnie możemy zapisać zależności współrzędnych przyspieszenia, prędkości i położenia od czasu jako: Ruch w polu grawitacyjnym Rzut w polu grawitacyjnym Ruch ciała poruszającego się swobodnie w jednorodnym polu grawitacyjnym odbywa się ze stałym przyspieszeniem: gdzie dokonaliśmy wyboru układu współrzędnych jak na rysunku (oś X poziomo, oś Y pionowo). Pole grawitacyjne Ziemi możemy przyjąć za jednorodne, jeśli badamy ruch na odległościach W zależności od warunków początkowych wyróżniamy następujące rodzaje ruchu: spadek swobodny: rzut pionowy: rzut poziomy: rzut ukośny: (ruch prostoliniowy) (ruch prostoliniowy)



11 Spadek swobodny Zdjęcie złożone z kolejnych klatek filmu, pokazujące spadek swobodny małej piłki na tle miarki: Wyniki "domowych" pomiarów (odczytane ze zdjęcia):
12 Położenie zależy kwadratowo od czasu: zakładając: Rzut ukośny Rzut ukośny Zakładamy, ze w chwili ciało wyrzucono z punktu, z prędkością skierowaną pod kątem do poziomu. Niezależność ruchów: ruch w poziomie jest ruchem jednostajnym, zależy tylko od ruch w pionie jest ruchem jednostajnie przyspieszonym, zależy tylko od Konsekwencje niezależności ruchów w X i Y: rzut poziomy czas spadania nie zależy od :
 Ruch")
13 dwa ciała o tym samym taki sam ruch w poziomie: Tor ruchu strugi wody Tor w rzucie ukośnym: torem ruchu jest parabola Zasięg dla h=0: największy zasięg dla (czyli ) Ruch harmoniczny

14 Zależność położenia od czasu w ruchu harmonicznym Szczególny przykład ruchu drgającego. W ruchu harmonicznym zależność położenia od czasu jest postaci: Parametry amplituda A częstość kołowa okres drgań Prędkość: faza początkowa Przyspieszenie: W ruchu harmonicznym spełniona jest zależność, którą nazywamy równaniem oscylatora harmonicznego ruch w jednym wymiarze
15 postać ogólna Równanie oscylatora dobrze opisuje zachowanie bardzo wielu układów fizycznych: ciężarek na sprężynie wahadło matematyczne (dla małych wychyleń) kamerton, struna, itp Równanie oscylatora harmonicznego jest przykładem równania różniczkowego. Nasza wiedza nt. ruchu ciała przedstawiana jest często w postaci równan różniczkowych (równań ruchu). Aby znaleźć opis ruchu ciała trzeba te równania rozwiązać. Najczęsciej są to równania typu: Ruch po okręgu Położenie ciała może być opisane jedną zmienną: kąt w płaszczyźnie XY długość łuku okręgu s = Wartość prędkości: gdzie prędkość kątowa jest zdefiniowana jako pochodna kąta po czasie:
 Prędkość w ruchu po okręgu w zapisie wektorowym: Przyspieszenie liczymy jako pochodną (iloczynu): Oprócz przyspieszenia stycznego, opisującego zmianę, jest też przyspieszenie normalne,")
16 Przyspieszenie kątowe definiujemy jako: Ruch jednostajny po okręgu to ruch w którym przyspieszenie kątowe znika: = const V = const ale const 0 (!!!) Prędkość w ruchu po okręgu w zapisie wektorowym: Przyspieszenie liczymy jako pochodną (iloczynu): Oprócz przyspieszenia stycznego, opisującego zmianę, jest też przyspieszenie normalne, odpowiedzialne za zmianę kierunku w czasie.
17 przyspieszenie dośrodkowe skorzystaliśmy z tożsamości: gdzie Ruch jednostajny po okręgu Ruch jednostajny po okręgu to ruch w którym przyspieszenie styczne znika: Ruch jednostajny po okręgu jest złożeniem dwóch niezależnych ruchów harmionicznych: Ruch po okręgu różnica faz Ciekawostka: Ruch harmoniczny można przedstawić jako złożenie dwóch ruchów po okręgu Efekt Dopplera W przypadku fal dźwiękowych znamy z codziennego doświadczenia
18 Jeśli źródło dźwięku jest nieruchome względem obserwatora, obserwator słyszy dźwięk o niezmienionej częstości. Jeśli źródło dźwięku porusza się względem obserwatora, obserwator słyszy dźwięk o wyższej lub niższej częstości Ruchome źródło Przyjmijmy, że źródło dżwięku o częstości poruszające się z prędkością względem ośrodka w którym prędkość dźwięku wynosi.
19 Dla uproszczenia: krótkie impulsy wysyłane co : wysłanie pierwszego impulsu wysłanie drugiego impulsu odległość między impulsami mierzona przez obserwatora jest sumą wkładów wynikających z propagacji impulsu (z prędkością c) i ruchu źródła (z prędkością v): Częstość dźwięku i długość fali mierzona przez obserwatora nieruchomego względem ośrodka: Ruchomy obserwator Rozważmy teraz sytuacje, w której obserwator porusza się z prędkością względem ośrodka i źródła dżwięku
20 aby dogonić obserwatora kolejny impuls musi pokonać odległość równą sumie początkowej odległości między impulsami i drogi jaką w tym czasie pokona obserwator Mierzona częstość: W klasycznym efekcie Dopplera zmiana częstości zależy nie tylko od względnej prędkości źródła i obserwatora ale i ruchu względem ośrodka. Ruch ośrodka Przyjmijmy, że źródło dźwięku i obserwator są względem siebie w spoczynku. Niech ich prędkość względem ośrodka wynosi Częstość mierzona przez obserwatora jest wynikiem złożenia dwóch efektów Dopplera: Częstość się nie zmienia, ale zmienia się czas miedzy wysłaniem a rejestrają impulsu:

21 Ruch ośrodka powoduje przesunięcie w fazie rejestrowanego dźwięku. Przypadek ogólny Zarówno źródło jak i obserwator poruszają się względem ośrodka. Przypadek ogólny efektu Dopplera Jeśli znamy ruch źródła i obserwatora w układzie związanym z ośrodkiem: To możemy wyznaczyć czas w jakim sygnał wyemitowany w chwili dotrze do obserwatora. Zadany jest on przez warunek: Jeśli równanie to można jednoznacznie rozwiązać to efekt Dopplera daje się wyrazić bardzo prostą zależnością: Przykład Głośnik wirujący po okręgu, w płaszczyźnie obserwatora
22 Wirujący głośnik Droga sygnału wyemitowanego w czasie : Dla : Oczekiwana zależność od czasu amplitudy dźwięku rejestrowanego przez źródło i obserwatora Głośnik nieruchomy

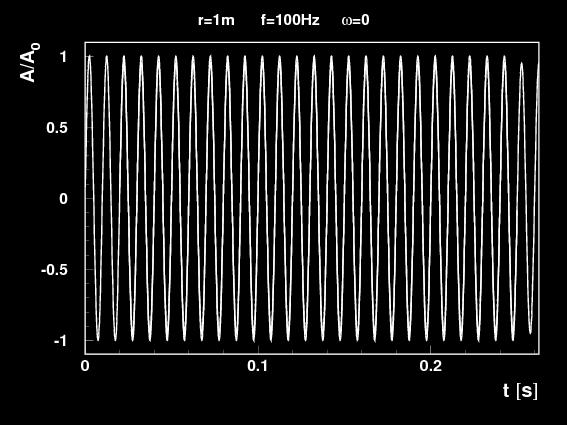
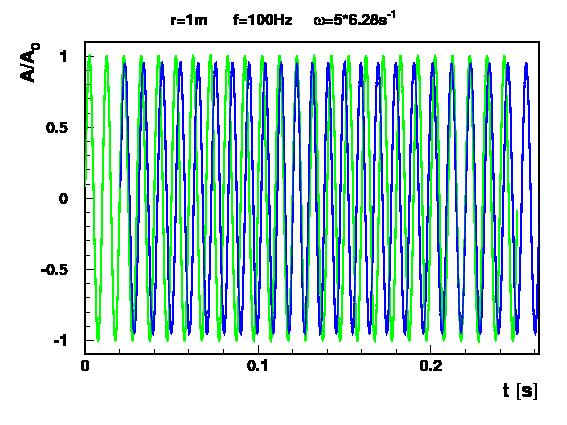

23 Głośnik wirujący
24 Choć średnia częstość mierzona przez obserwatora jest równa częstości źródła widoczna jest wyraźna modulacja częstości
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Wstęp do Fizyki I (B+C) Wykład III: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny Pojęcia podstawowe
Kinematyka: opis ruchu Wstęp do Fizyki I (B+C) Wykład III: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny Pojęcia podstawowe
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Fizyka I (Mechanika) Wykład II: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny, ruch jednostajnie przyspieszony
Kinematyka: opis ruchu Fizyka I (Mechanika) Wykład II: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny, ruch jednostajnie przyspieszony
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Fizyka I (Mechanika) Wykład II: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny, ruch jednostajnie przyspieszony
Kinematyka: opis ruchu Fizyka I (Mechanika) Wykład II: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny, ruch jednostajnie przyspieszony
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Wektory, układ współrzędnych
 Wektory, układ współrzędnych Wielkości występujące w przyrodzie możemy podzielić na: Skalarne, to jest takie wielkości, które potrafimy opisać przy pomocy jednej liczby (skalara), np. masa, czy temperatura.
Wektory, układ współrzędnych Wielkości występujące w przyrodzie możemy podzielić na: Skalarne, to jest takie wielkości, które potrafimy opisać przy pomocy jednej liczby (skalara), np. masa, czy temperatura.
Ruch. Kinematyka zajmuje się opisem ruchu różnych ciał bez wnikania w przyczyny, które ruch ciał spowodował.
 Kinematyka Ruch Kinematyka zajmuje się opisem ruchu różnych ciał bez wnikania w przyczyny, które ruch ciał spowodował. Ruch rozumiany jest jako zmiana położenia jednych ciał względem innych, które nazywamy
Kinematyka Ruch Kinematyka zajmuje się opisem ruchu różnych ciał bez wnikania w przyczyny, które ruch ciał spowodował. Ruch rozumiany jest jako zmiana położenia jednych ciał względem innych, które nazywamy
MECHANIKA 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
Wstęp. Ruch po okręgu w kartezjańskim układzie współrzędnych
 Wstęp Ruch po okręgu jest najprostszym przypadkiem płaskich ruchów krzywoliniowych. W ogólnym przypadku ruch po okręgu opisujemy równaniami: gdzie: dowolna funkcja czasu. Ruch odbywa się po okręgu o środku
Wstęp Ruch po okręgu jest najprostszym przypadkiem płaskich ruchów krzywoliniowych. W ogólnym przypadku ruch po okręgu opisujemy równaniami: gdzie: dowolna funkcja czasu. Ruch odbywa się po okręgu o środku
Wykład 2. Kinematyka. Podstawowe wielkości opisujące ruch. W tekście tym przedstawię podstawowe pojecia niezbędne do opiosu ruchu:
 Wykład 2. Kinematyka. Aby prześledzić tok tego wykładu MUSISZ rozumieć pojęcie wektora, jego składowych w układzie kartezjańskim oraz w trakcie wykładu zrozumieć intuicyjnie pojęcie pochodnej funkcji jednej
Wykład 2. Kinematyka. Aby prześledzić tok tego wykładu MUSISZ rozumieć pojęcie wektora, jego składowych w układzie kartezjańskim oraz w trakcie wykładu zrozumieć intuicyjnie pojęcie pochodnej funkcji jednej
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Wzorce sekunda Aktualnie niepewność pomiaru czasu to 1s na 70mln lat!!! 2 Modele w fizyce Uproszczenie problemów Tworzenie prostych modeli, pojęć i operowanie nimi 3 Opis ruchu Opis
w poprzednim odcinku 1 Wzorce sekunda Aktualnie niepewność pomiaru czasu to 1s na 70mln lat!!! 2 Modele w fizyce Uproszczenie problemów Tworzenie prostych modeli, pojęć i operowanie nimi 3 Opis ruchu Opis
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Zasada zachowania energii
 Zasada zachowania energii Praca i energia Praca Najprostszy przypadek: Stała siła działa na ciało P powodując jego przesunięcie wzdłuż kierunku działania siły o. Praca jaką wykona przy tym siła W przypadku
Zasada zachowania energii Praca i energia Praca Najprostszy przypadek: Stała siła działa na ciało P powodując jego przesunięcie wzdłuż kierunku działania siły o. Praca jaką wykona przy tym siła W przypadku
Mechanika. Wykład 2. Paweł Staszel
 Mechanika Wykład 2 Paweł Staszel 1 Przejście graniczne 0 2 Podstawowe twierdzenia o pochodnych: pochodna funkcji mnożonej przez skalar pochodna sumy funkcji pochodna funkcji złożonej pochodna iloczynu
Mechanika Wykład 2 Paweł Staszel 1 Przejście graniczne 0 2 Podstawowe twierdzenia o pochodnych: pochodna funkcji mnożonej przez skalar pochodna sumy funkcji pochodna funkcji złożonej pochodna iloczynu
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
Ruch jednowymiarowy. Autorzy: Zbigniew Kąkol Kamil Kutorasiński
 Ruch jednowymiarowy Autorzy: Zbigniew Kąkol Kamil Kutorasiński 017 Ruch jednowymiarowy Autorzy: Zbigniew Kąkol, Kamil Kutorasiński Dział Fizyki zajmujący się opisem ruchu ciał nazywamy kinematyką. Definicja
Ruch jednowymiarowy Autorzy: Zbigniew Kąkol Kamil Kutorasiński 017 Ruch jednowymiarowy Autorzy: Zbigniew Kąkol, Kamil Kutorasiński Dział Fizyki zajmujący się opisem ruchu ciał nazywamy kinematyką. Definicja
KINEMATYKA czyli opis ruchu. Marian Talar
 KINEMATYKA czyli opis ruchu 1 października 2006 2 Kinematyka czyli opis ruchu 1 Podstawowe pojęcia Kinematyka jest działem fizyki, który zajmuje się tylko opisem ruchu ciał. W ruchu postępowym ciało zastępuje
KINEMATYKA czyli opis ruchu 1 października 2006 2 Kinematyka czyli opis ruchu 1 Podstawowe pojęcia Kinematyka jest działem fizyki, który zajmuje się tylko opisem ruchu ciał. W ruchu postępowym ciało zastępuje
18. Siły bezwładności Siła bezwładności w ruchu postępowych Siła odśrodkowa bezwładności Siła Coriolisa
 Kinematyka 1. Podstawowe własności wektorów 5 1.1 Dodawanie (składanie) wektorów 7 1.2 Odejmowanie wektorów 7 1.3 Mnożenie wektorów przez liczbę 7 1.4 Wersor 9 1.5 Rzut wektora 9 1.6 Iloczyn skalarny wektorów
Kinematyka 1. Podstawowe własności wektorów 5 1.1 Dodawanie (składanie) wektorów 7 1.2 Odejmowanie wektorów 7 1.3 Mnożenie wektorów przez liczbę 7 1.4 Wersor 9 1.5 Rzut wektora 9 1.6 Iloczyn skalarny wektorów
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
Powtórzenie wiadomości z klasy I. Temat: Ruchy prostoliniowe. Obliczenia
 Powtórzenie wiadomości z klasy I Temat: Ruchy prostoliniowe. Obliczenia Ruch jest względny 1.Ruch i spoczynek są pojęciami względnymi. Można jednocześnie być w ruchu względem jednego ciała i w spoczynku
Powtórzenie wiadomości z klasy I Temat: Ruchy prostoliniowe. Obliczenia Ruch jest względny 1.Ruch i spoczynek są pojęciami względnymi. Można jednocześnie być w ruchu względem jednego ciała i w spoczynku
Część I. MECHANIKA. Wykład KINEMATYKA PUNKTU MATERIALNEGO. Ruch jednowymiarowy Ruch na płaszczyźnie i w przestrzeni.
 Część I. MECHANIKA Wykład.. KINEMATYKA PUNKTU MATERIALNEGO Ruch jednowymiarowy Ruch na płaszczyźnie i w przestrzeni 1 KINEMATYKA PUNKTU MATERIALNEGO KINEMATYKA zajmuje się opisem ruchu ciał bez rozpatrywania
Część I. MECHANIKA Wykład.. KINEMATYKA PUNKTU MATERIALNEGO Ruch jednowymiarowy Ruch na płaszczyźnie i w przestrzeni 1 KINEMATYKA PUNKTU MATERIALNEGO KINEMATYKA zajmuje się opisem ruchu ciał bez rozpatrywania
Dynamika: układy nieinercjalne
 Dynamika: układy nieinercjalne Spis treści 1 Układ inercjalny 2 Układy nieinercjalne 2.1 Opis ruchu 2.2 Prawa ruchu 2.3 Ruch poziomy 2.4 Równia 2.5 Spadek swobodny 3 Układy obracające się 3.1 Układ inercjalny
Dynamika: układy nieinercjalne Spis treści 1 Układ inercjalny 2 Układy nieinercjalne 2.1 Opis ruchu 2.2 Prawa ruchu 2.3 Ruch poziomy 2.4 Równia 2.5 Spadek swobodny 3 Układy obracające się 3.1 Układ inercjalny
Fizyka 11. Janusz Andrzejewski
 Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
Tadeusz Lesiak. Podstawy mechaniki Newtona Kinematyka punktu materialnego
 Mechanika klasyczna Tadeusz Lesiak Wykład nr 2 Podstawy mechaniki Newtona Kinematyka punktu materialnego Kinematyka punktu materialnego Kinematyka: zajmuje się matematycznym opisem ruchów układów mechanicznych
Mechanika klasyczna Tadeusz Lesiak Wykład nr 2 Podstawy mechaniki Newtona Kinematyka punktu materialnego Kinematyka punktu materialnego Kinematyka: zajmuje się matematycznym opisem ruchów układów mechanicznych
WYMAGANIA EDUKACYJNE FIZYKA STOSOWANA II Liceum Ogólnokształcące im. Adama Asnyka w Bielsku-Białej
 WYMAGANIA EDUKACYJNE FIZYKA STOSOWANA II Liceum Ogólnokształcące im. Adama Asnyka w Bielsku-Białej OSIĄGNIĘCIA UCZNIÓW Z ZAKRESIE KSZTAŁCENIA W kolumnie "wymagania na poziom podstawowy" opisano wymagania
WYMAGANIA EDUKACYJNE FIZYKA STOSOWANA II Liceum Ogólnokształcące im. Adama Asnyka w Bielsku-Białej OSIĄGNIĘCIA UCZNIÓW Z ZAKRESIE KSZTAŁCENIA W kolumnie "wymagania na poziom podstawowy" opisano wymagania
Elementy rachunku różniczkowego i całkowego
 Elementy rachunku różniczkowego i całkowego W paragrafie tym podane zostaną elementarne wiadomości na temat rachunku różniczkowego i całkowego oraz przykłady jego zastosowania w fizyce. Małymi literami
Elementy rachunku różniczkowego i całkowego W paragrafie tym podane zostaną elementarne wiadomości na temat rachunku różniczkowego i całkowego oraz przykłady jego zastosowania w fizyce. Małymi literami
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
R o z d z i a ł 2 KINEMATYKA PUNKTU MATERIALNEGO
 R o z d z i a ł KINEMATYKA PUNKTU MATERIALNEGO Kinematyka zajmuje się opisem ruchu ciał bez uwzględniania ich masy i bez rozpatrywania przyczyn, które ten ruch spowodowały. Przez punkt materialny rozumiemy
R o z d z i a ł KINEMATYKA PUNKTU MATERIALNEGO Kinematyka zajmuje się opisem ruchu ciał bez uwzględniania ich masy i bez rozpatrywania przyczyn, które ten ruch spowodowały. Przez punkt materialny rozumiemy
WYMAGANIA EDUKACYJNE PRZEDMIOT : FIZYKA ROZSZERZONA
 WYMAGANIA EDUKACYJNE PRZEDMIOT : FIZYKA ROZSZERZONA ROK SZKOLNY: 2018/2019 KLASY: 2mT OPRACOWAŁ: JOANNA NALEPA OCENA CELUJĄCY OCENA BARDZO DOBRY - w pełnym zakresie - w pełnym opanował zakresie opanował
WYMAGANIA EDUKACYJNE PRZEDMIOT : FIZYKA ROZSZERZONA ROK SZKOLNY: 2018/2019 KLASY: 2mT OPRACOWAŁ: JOANNA NALEPA OCENA CELUJĄCY OCENA BARDZO DOBRY - w pełnym zakresie - w pełnym opanował zakresie opanował
Ruch jednostajnie zmienny prostoliniowy
 Ruch jednostajnie zmienny prostoliniowy Przyspieszenie w ruchu jednostajnie zmiennym prostoliniowym Jest to taki ruch, w którym wektor przyspieszenia jest stały, co do wartości (niezerowej), kierunku i
Ruch jednostajnie zmienny prostoliniowy Przyspieszenie w ruchu jednostajnie zmiennym prostoliniowym Jest to taki ruch, w którym wektor przyspieszenia jest stały, co do wartości (niezerowej), kierunku i
Prawa ruchu: dynamika
 Prawa ruchu: dynamika Fizyka I (B+C) Wykład X: Równania ruchu Więzy Rozwiazywanie równań ruchu oscylator harminiczny, wahadło ruch w jednorodnym polu elektrycznym i magnetycznym spektroskop III zasada
Prawa ruchu: dynamika Fizyka I (B+C) Wykład X: Równania ruchu Więzy Rozwiazywanie równań ruchu oscylator harminiczny, wahadło ruch w jednorodnym polu elektrycznym i magnetycznym spektroskop III zasada
Dr Kazimierz Sierański www. If.pwr.wroc.pl/~sieranski Konsultacje pok. 320 A-1: codziennie po ćwiczeniach
 Dr Kazimierz Sierański kazimierz.sieranski@pwr.edu.pl www. If.pwr.wroc.pl/~sieranski Konsultacje pok. 320 A-1: codziennie po ćwiczeniach Forma zaliczenia kursu: egzamin końcowy Grupa kursów -warunkiem
Dr Kazimierz Sierański kazimierz.sieranski@pwr.edu.pl www. If.pwr.wroc.pl/~sieranski Konsultacje pok. 320 A-1: codziennie po ćwiczeniach Forma zaliczenia kursu: egzamin końcowy Grupa kursów -warunkiem
Zasada zachowania pędu
 Zasada zachowania pędu Zasada zachowania pędu Układ izolowany Układem izolowanym nazwiemy układ, w którym każde ciało może w dowolny sposób oddziaływać z innymi elementami układu, ale brak jest oddziaływań
Zasada zachowania pędu Zasada zachowania pędu Układ izolowany Układem izolowanym nazwiemy układ, w którym każde ciało może w dowolny sposób oddziaływać z innymi elementami układu, ale brak jest oddziaływań
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
Plan wynikowy z wymaganiami edukacyjnymi przedmiotu fizyka w zakresie rozszerzonym dla I klasy liceum ogólnokształcącego i technikum
 Plan wynikowy z mi edukacyjnymi przedmiotu fizyka w zakresie rozszerzonym dla I klasy liceum ogólnokształcącego i technikum Temat (rozumiany jako lekcja) Wymagania konieczne (ocena dopuszczająca) Dział
Plan wynikowy z mi edukacyjnymi przedmiotu fizyka w zakresie rozszerzonym dla I klasy liceum ogólnokształcącego i technikum Temat (rozumiany jako lekcja) Wymagania konieczne (ocena dopuszczająca) Dział
Prawa ruchu: dynamika
 Prawa ruchu: dynamika Fizyka I (B+C) Wykład IX: Więzy Rozwiazywanie równań ruchu oscylator harminiczny, wahadło ruch w jednorodnym polu elektrycznym i magnetycznym spektroskop III zasada dynamiki Siły
Prawa ruchu: dynamika Fizyka I (B+C) Wykład IX: Więzy Rozwiazywanie równań ruchu oscylator harminiczny, wahadło ruch w jednorodnym polu elektrycznym i magnetycznym spektroskop III zasada dynamiki Siły
Podstawy fizyki wykład 7
 Podstawy fizyki wykład 7 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Drgania Drgania i fale Drgania harmoniczne Siła sprężysta Energia drgań Składanie drgań Drgania tłumione i wymuszone Fale
Podstawy fizyki wykład 7 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Drgania Drgania i fale Drgania harmoniczne Siła sprężysta Energia drgań Składanie drgań Drgania tłumione i wymuszone Fale
Plan wynikowy z wymaganiami edukacyjnymi przedmiotu fizyka w zakresie rozszerzonym dla szkoły ponadgimnazjalnej, tom 1
 Plan wynikowy z mi edukacyjnymi przedmiotu fizyka w zakresie rozszerzonym dla szkoły ponadgimnazjalnej, tom 1 Temat (rozumiany jako lekcja) Dział 1. Wiadomości wstępne 2.1. Podstawowe pojęcia fizyki Wymagania
Plan wynikowy z mi edukacyjnymi przedmiotu fizyka w zakresie rozszerzonym dla szkoły ponadgimnazjalnej, tom 1 Temat (rozumiany jako lekcja) Dział 1. Wiadomości wstępne 2.1. Podstawowe pojęcia fizyki Wymagania
Prawa ruchu: dynamika
 Prawa ruchu: dynamika Fizyka I (B+C) Wykład X: Dynamika ruchu po okręgu siła dośrodkowa Prawa ruchu w układzie nieinercjalnym siły bezwładności Prawa ruchu w układzie obracajacym się siła odśrodkowa siła
Prawa ruchu: dynamika Fizyka I (B+C) Wykład X: Dynamika ruchu po okręgu siła dośrodkowa Prawa ruchu w układzie nieinercjalnym siły bezwładności Prawa ruchu w układzie obracajacym się siła odśrodkowa siła
lub też (uwzględniając fakt, że poruszają się w kierunkach prostopadłych) w układzie współrzędnych kartezjańskich: x 1 (t) = v 1 t y 2 (t) = v 2 t
 w układzie współrzędnych kartezjańskich: x 1 (t) = v 1 t y 2 (t) = v 2 t") Zad. 1 Dwa okręty wyruszyły jednocześnie z tego samego miejsca w drogę w kierunkach do siebie prostopadłych, jeden z prędkością υ 1 = 30 km/h, drugi z prędkością υ 2 = 40 km/h. Obliczyć prędkość wzajemnego
Zad. 1 Dwa okręty wyruszyły jednocześnie z tego samego miejsca w drogę w kierunkach do siebie prostopadłych, jeden z prędkością υ 1 = 30 km/h, drugi z prędkością υ 2 = 40 km/h. Obliczyć prędkość wzajemnego
Treści dopełniające Uczeń potrafi:
 P Lp. Temat lekcji Treści podstawowe 1 Elementy działań na wektorach podać przykłady wielkości fizycznych skalarnych i wektorowych, wymienić cechy wektora, dodać wektory, odjąć wektor od wektora, pomnożyć
P Lp. Temat lekcji Treści podstawowe 1 Elementy działań na wektorach podać przykłady wielkości fizycznych skalarnych i wektorowych, wymienić cechy wektora, dodać wektory, odjąć wektor od wektora, pomnożyć
MECHANIKA 2 KINEMATYKA. Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
Elementy dynamiki klasycznej - wprowadzenie. dr inż. Romuald Kędzierski
 Elementy dynamiki klasycznej - wprowadzenie dr inż. Romuald Kędzierski Po czym można rozpoznać, że na ciało działają siły? Możliwe skutki działania sił: Po skutkach działania sił. - zmiana kierunku ruchu
Elementy dynamiki klasycznej - wprowadzenie dr inż. Romuald Kędzierski Po czym można rozpoznać, że na ciało działają siły? Możliwe skutki działania sił: Po skutkach działania sił. - zmiana kierunku ruchu
Wymagania edukacyjne z przedmiotu fizyka w zakresie rozszerzonym RF-II
 Wymagania edukacyjne z przedmiotu fizyka w zakresie rozszerzonym RF-II Temat (rozumiany jako lekcja) Dział 1. Wiadomości wstępne 2.1. Podstawowe pojęcia fizyki Wymagania konieczne (ocena dopuszczająca)
Wymagania edukacyjne z przedmiotu fizyka w zakresie rozszerzonym RF-II Temat (rozumiany jako lekcja) Dział 1. Wiadomości wstępne 2.1. Podstawowe pojęcia fizyki Wymagania konieczne (ocena dopuszczająca)
Ćwiczenie M-2 Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego Cel ćwiczenia: II. Przyrządy: III. Literatura: IV. Wstęp. l Rys.
 Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Bryła sztywna. Fizyka I (B+C) Wykład XXI: Statyka Prawa ruchu Moment bezwładności Energia ruchu obrotowego
 Wykład XXI: Statyka Prawa ruchu Moment bezwładności Energia ruchu obrotowego") Bryła sztywna Fizyka I (B+C) Wykład XXI: Statyka Prawa ruchu Moment bezwładności Energia ruchu obrotowego Typ równowagi zależy od zmiany położenia środka masy ( Równowaga Statyka Bryły sztywnej umieszczonej
Bryła sztywna Fizyka I (B+C) Wykład XXI: Statyka Prawa ruchu Moment bezwładności Energia ruchu obrotowego Typ równowagi zależy od zmiany położenia środka masy ( Równowaga Statyka Bryły sztywnej umieszczonej
Prawa fizyki wyrażają związki między różnymi wielkościami fizycznymi.
 Prawa fizyki i wielkości fizyczne Fizyka (z stgr. φύσις physis "natura") nauka o przyrodzie w najszerszym znaczeniu tego słowa. Prawa fizyki wyrażają związki między różnymi wielkościami fizycznymi. Prawa
Prawa fizyki i wielkości fizyczne Fizyka (z stgr. φύσις physis "natura") nauka o przyrodzie w najszerszym znaczeniu tego słowa. Prawa fizyki wyrażają związki między różnymi wielkościami fizycznymi. Prawa
MECHANIKA 2 Wykład 7 Dynamiczne równania ruchu
 MECHANIKA 2 Wykład 7 Dynamiczne równania ruchu Prowadzący: dr Krzysztof Polko Dynamiczne równania ruchu Druga zasada dynamiki zapisana w postaci: Jest dynamicznym wektorowym równaniem ruchu. Dynamiczne
MECHANIKA 2 Wykład 7 Dynamiczne równania ruchu Prowadzący: dr Krzysztof Polko Dynamiczne równania ruchu Druga zasada dynamiki zapisana w postaci: Jest dynamicznym wektorowym równaniem ruchu. Dynamiczne
1. Kinematyka 8 godzin
 Plan wynikowy (propozycja) część 1 1. Kinematyka 8 godzin Wymagania Treści nauczania (tematy lekcji) Cele operacyjne podstawowe ponadpodstawowe Uczeń: konieczne podstawowe rozszerzające dopełniające Jak
Plan wynikowy (propozycja) część 1 1. Kinematyka 8 godzin Wymagania Treści nauczania (tematy lekcji) Cele operacyjne podstawowe ponadpodstawowe Uczeń: konieczne podstawowe rozszerzające dopełniające Jak
Rozważania rozpoczniemy od fal elektromagnetycznych w próżni. Dla próżni równania Maxwella w tzw. postaci różniczkowej są następujące:
 Rozważania rozpoczniemy od fal elektromagnetycznych w próżni Dla próżni równania Maxwella w tzw postaci różniczkowej są następujące:, gdzie E oznacza pole elektryczne, B indukcję pola magnetycznego a i
Rozważania rozpoczniemy od fal elektromagnetycznych w próżni Dla próżni równania Maxwella w tzw postaci różniczkowej są następujące:, gdzie E oznacza pole elektryczne, B indukcję pola magnetycznego a i
Zakres materiału do testu przyrostu kompetencji z fizyki w kl. II
 Zakres materiału do testu przyrostu kompetencji z fizyki w kl. II Wiadomości wstępne 1.1Podstawowe pojęcia fizyki 1.2Jednostki 1.3Wykresy definiuje pojęcia zjawiska fizycznego i wielkości fizycznej wyjaśnia
Zakres materiału do testu przyrostu kompetencji z fizyki w kl. II Wiadomości wstępne 1.1Podstawowe pojęcia fizyki 1.2Jednostki 1.3Wykresy definiuje pojęcia zjawiska fizycznego i wielkości fizycznej wyjaśnia
W efekcie złożenia tych dwóch ruchów ciało porusza się ruchem złożonym po torze, który w tym przypadku jest łukiem paraboli.
 1. Pocisk wystrzelony poziomo leciał t k = 10 *s+, spadł w odległości S = 600 *m+. Oblicz prędkośd początkową pocisku V0 =?, i z jakiej wysokości został wystrzelony, jak daleko zaleciałby ten pocisk, gdyby
1. Pocisk wystrzelony poziomo leciał t k = 10 *s+, spadł w odległości S = 600 *m+. Oblicz prędkośd początkową pocisku V0 =?, i z jakiej wysokości został wystrzelony, jak daleko zaleciałby ten pocisk, gdyby
RÓWNANIA RÓŻNICZKOWE WYKŁAD 4
 RÓWNANIA RÓŻNICZKOWE WYKŁAD 4 Obszar określoności równania Jeżeli występująca w równaniu y' f ( x, y) funkcja f jest ciągła, to równanie posiada rozwiązanie. Jeżeli f jest nieokreślona w punkcie (x 0,
RÓWNANIA RÓŻNICZKOWE WYKŁAD 4 Obszar określoności równania Jeżeli występująca w równaniu y' f ( x, y) funkcja f jest ciągła, to równanie posiada rozwiązanie. Jeżeli f jest nieokreślona w punkcie (x 0,
Bryła sztywna. Wstęp do Fizyki I (B+C) Wykład XIX: Prawa ruchu Moment bezwładności Energia ruchu obrotowego
 Wykład XIX: Prawa ruchu Moment bezwładności Energia ruchu obrotowego") Bryła sztywna Wstęp do Fizyki I (B+C) Wykład XIX: Prawa ruchu Moment bezwładności Energia ruchu obrotowego Obrót wokół ustalonej osi Prawa ruchu Dla bryły sztywnej obracajacej się wokół ostalonej osi mement
Bryła sztywna Wstęp do Fizyki I (B+C) Wykład XIX: Prawa ruchu Moment bezwładności Energia ruchu obrotowego Obrót wokół ustalonej osi Prawa ruchu Dla bryły sztywnej obracajacej się wokół ostalonej osi mement
Fizyka. Program Wykładu. Program Wykładu c.d. Literatura. Rok akademicki 2013/2014
 Program Wykładu Fizyka Wydział Zarządzania i Ekonomii Rok akademicki 2013/2014 Mechanika Kinematyka i dynamika punktu materialnego Zasady zachowania energii, pędu i momentu pędu Podstawowe własności pola
Program Wykładu Fizyka Wydział Zarządzania i Ekonomii Rok akademicki 2013/2014 Mechanika Kinematyka i dynamika punktu materialnego Zasady zachowania energii, pędu i momentu pędu Podstawowe własności pola
Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia.
 Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia. Grupa 1. Kinematyka 1. W ciągu dwóch sekund od wystrzelenia z powierzchni ziemi pocisk przemieścił się o 40 m w poziomie i o 53
Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia. Grupa 1. Kinematyka 1. W ciągu dwóch sekund od wystrzelenia z powierzchni ziemi pocisk przemieścił się o 40 m w poziomie i o 53
Ruch drgający i falowy
 Ruch drgający i falowy 1. Ruch harmoniczny 1.1. Pojęcie ruchu harmonicznego Jednym z najbardziej rozpowszechnionych ruchów w mechanice jest ruch ciała drgającego. Przykładem takiego ruchu może być ruch
Ruch drgający i falowy 1. Ruch harmoniczny 1.1. Pojęcie ruchu harmonicznego Jednym z najbardziej rozpowszechnionych ruchów w mechanice jest ruch ciała drgającego. Przykładem takiego ruchu może być ruch
Ruch prostoliniowy. zmienny. dr inż. Romuald Kędzierski
 Ruch prostoliniowy zmienny dr inż. Romuald Kędzierski Przypomnienie Szybkość średnia Wielkość skalarna definiowana, jako iloraz przebytej drogi i czasu, w którym ta droga została przebyta. Uwaga: Szybkość
Ruch prostoliniowy zmienny dr inż. Romuald Kędzierski Przypomnienie Szybkość średnia Wielkość skalarna definiowana, jako iloraz przebytej drogi i czasu, w którym ta droga została przebyta. Uwaga: Szybkość
Opis ruchu obrotowego
 Opis ruchu obrotowego Oprócz ruchu translacyjnego ciała obserwujemy w przyrodzie inną jego odmianę: ruch obrotowy Ruch obrotowy jest zawsze względem osi obrotu W ruchu obrotowym wszystkie punkty zakreślają
Opis ruchu obrotowego Oprócz ruchu translacyjnego ciała obserwujemy w przyrodzie inną jego odmianę: ruch obrotowy Ruch obrotowy jest zawsze względem osi obrotu W ruchu obrotowym wszystkie punkty zakreślają
DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Rys Model układu
 Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Podstawy fizyki sezon 1 VII. Ruch drgający
 Podstawy fizyki sezon 1 VII. Ruch drgający Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Ruch skutkiem działania
Podstawy fizyki sezon 1 VII. Ruch drgający Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Ruch skutkiem działania
TEORIA DRGAŃ Program wykładu 2016
 TEORIA DRGAŃ Program wykładu 2016 I. KINEMATYKA RUCHU POSTE POWEGO 1. Ruch jednowymiarowy 1.1. Prędkość (a) Prędkość średnia (b) Prędkość chwilowa (prędkość) 1.2. Przyspieszenie (a) Przyspieszenie średnie
TEORIA DRGAŃ Program wykładu 2016 I. KINEMATYKA RUCHU POSTE POWEGO 1. Ruch jednowymiarowy 1.1. Prędkość (a) Prędkość średnia (b) Prędkość chwilowa (prędkość) 1.2. Przyspieszenie (a) Przyspieszenie średnie
Zasady dynamiki Newtona. Pęd i popęd. Siły bezwładności
 Zasady dynamiki Newtona Pęd i popęd Siły bezwładności Copyright by pleciuga@o2.pl Inercjalne układy odniesienia Układy inercjalne to takie układy odniesienia, względem których wszystkie ciała nie oddziałujące
Zasady dynamiki Newtona Pęd i popęd Siły bezwładności Copyright by pleciuga@o2.pl Inercjalne układy odniesienia Układy inercjalne to takie układy odniesienia, względem których wszystkie ciała nie oddziałujące
Zasady dynamiki Newtona. dr inż. Romuald Kędzierski
 Zasady dynamiki Newtona dr inż. Romuald Kędzierski Czy do utrzymania ciała w ruchu jednostajnym prostoliniowym potrzebna jest siła? Arystoteles 384-322 p.n.e. Do utrzymania ciała w ruchu jednostajnym prostoliniowym
Zasady dynamiki Newtona dr inż. Romuald Kędzierski Czy do utrzymania ciała w ruchu jednostajnym prostoliniowym potrzebna jest siła? Arystoteles 384-322 p.n.e. Do utrzymania ciała w ruchu jednostajnym prostoliniowym
Wektor położenia. Zajęcia uzupełniające. Mgr Kamila Rudź, Podstawy Fizyki. http://kepler.am.gdynia.pl/~karudz
 Kartezjański układ współrzędnych: Wersory osi: e x x i e y y j e z z k r - wektor o współrzędnych [ x 0, y 0, z 0 ] Wektor położenia: r t =[ x t, y t,z t ] każda współrzędna zmienia się w czasie. r t =
Kartezjański układ współrzędnych: Wersory osi: e x x i e y y j e z z k r - wektor o współrzędnych [ x 0, y 0, z 0 ] Wektor położenia: r t =[ x t, y t,z t ] każda współrzędna zmienia się w czasie. r t =
MECHANIKA 2. Praca, moc, energia. Wykład Nr 11. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
FUNKCJE ELEMENTARNE I ICH WŁASNOŚCI
 FUNKCJE ELEMENTARNE I ICH WŁASNOŚCI DEFINICJA (funkcji elementarnych) Podstawowymi funkcjami elementarnymi nazywamy funkcje: stałe potęgowe wykładnicze logarytmiczne trygonometryczne Funkcje, które można
FUNKCJE ELEMENTARNE I ICH WŁASNOŚCI DEFINICJA (funkcji elementarnych) Podstawowymi funkcjami elementarnymi nazywamy funkcje: stałe potęgowe wykładnicze logarytmiczne trygonometryczne Funkcje, które można
Fizyka 1- Mechanika. Wykład 4 26.X Zygmunt Szefliński Środowiskowe Laboratorium Ciężkich Jonów
 Fizyka 1- Mechanika Wykład 4 6.X.017 Zygmunt Szefliński Środowiskowe Laboratorium Ciężkich Jonów szef@fuw.edu.pl http://www.fuw.edu.pl/~szef/ III zasada dynamiki Zasada akcji i reakcji Każdemu działaniu
Fizyka 1- Mechanika Wykład 4 6.X.017 Zygmunt Szefliński Środowiskowe Laboratorium Ciężkich Jonów szef@fuw.edu.pl http://www.fuw.edu.pl/~szef/ III zasada dynamiki Zasada akcji i reakcji Każdemu działaniu
Nazwisko i imię: Zespół: Data: Ćwiczenie nr 1: Wahadło fizyczne. opis ruchu drgającego a w szczególności drgań wahadła fizycznego
 Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
MECHANIKA II. Praca i energia punktu materialnego
 MECHANIKA II. Praca i energia punktu materialnego Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA II. Praca i energia punktu materialnego Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
Bryła sztywna. Fizyka I (B+C) Wykład XXIII: Przypomnienie: statyka
 Wykład XXIII: Przypomnienie: statyka") Bryła sztywna Fizyka I (B+C) Wykład XXIII: Przypomnienie: statyka Moment bezwładności Prawa ruchu Energia ruchu obrotowego Porównanie ruchu obrotowego z ruchem postępowym Przypomnienie Równowaga bryły
Bryła sztywna Fizyka I (B+C) Wykład XXIII: Przypomnienie: statyka Moment bezwładności Prawa ruchu Energia ruchu obrotowego Porównanie ruchu obrotowego z ruchem postępowym Przypomnienie Równowaga bryły
Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!)
") Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!) Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Kinematyka ruchu
Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!) Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Kinematyka ruchu
VI. CELE OPERACYJNE, CZYLI PLAN WYNIKOWY (CZ. 1)
") 1 VI. CELE OPERACYJNE, CZYLI PLAN WYNIKOWY (CZ. 1) 1. Opis ruchu postępowego 1 Elementy działań na wektorach podać przykłady wielkości fizycznych skalarnych i wektorowych, wymienić cechy wektora, dodać
1 VI. CELE OPERACYJNE, CZYLI PLAN WYNIKOWY (CZ. 1) 1. Opis ruchu postępowego 1 Elementy działań na wektorach podać przykłady wielkości fizycznych skalarnych i wektorowych, wymienić cechy wektora, dodać
Rachunek całkowy - całka oznaczona
 SPIS TREŚCI. 2. CAŁKA OZNACZONA: a. Związek między całką oznaczoną a nieoznaczoną. b. Definicja całki oznaczonej. c. Własności całek oznaczonych. d. Zastosowanie całek oznaczonych. e. Zamiana zmiennej
SPIS TREŚCI. 2. CAŁKA OZNACZONA: a. Związek między całką oznaczoną a nieoznaczoną. b. Definicja całki oznaczonej. c. Własności całek oznaczonych. d. Zastosowanie całek oznaczonych. e. Zamiana zmiennej
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
Podstawowy problem mechaniki klasycznej punktu materialnego można sformułować w sposób następujący:
 Dynamika Podstawowy problem mechaniki klasycznej punktu materialnego można sformułować w sposób następujący: mamy ciało (zachowujące się jak punkt materialny) o znanych właściwościach (masa, ładunek itd.),
Dynamika Podstawowy problem mechaniki klasycznej punktu materialnego można sformułować w sposób następujący: mamy ciało (zachowujące się jak punkt materialny) o znanych właściwościach (masa, ładunek itd.),
Wstęp do równań różniczkowych
 Wstęp do równań różniczkowych Wykład 1 Lech Sławik Instytut Matematyki PK Literatura 1. Arnold W.I., Równania różniczkowe zwyczajne, PWN, Warszawa, 1975. 2. Matwiejew N.M., Metody całkowania równań różniczkowych
Wstęp do równań różniczkowych Wykład 1 Lech Sławik Instytut Matematyki PK Literatura 1. Arnold W.I., Równania różniczkowe zwyczajne, PWN, Warszawa, 1975. 2. Matwiejew N.M., Metody całkowania równań różniczkowych
Plan wynikowy fizyka rozszerzona klasa 2
 Plan wynikowy fizyka rozszerzona klasa 2 1. Opis ruchu postępowego Temat lekcji Elementy działań na wektorach dostateczną uczeń podać przykłady wielkości fizycznych skalarnych i wektorowych, wymienić cechy
Plan wynikowy fizyka rozszerzona klasa 2 1. Opis ruchu postępowego Temat lekcji Elementy działań na wektorach dostateczną uczeń podać przykłady wielkości fizycznych skalarnych i wektorowych, wymienić cechy
MiBM sem. III Zakres materiału wykładu z fizyki
 MiBM sem. III Zakres materiału wykładu z fizyki 1. Dynamika układów punktów materialnych 2. Elementy mechaniki relatywistycznej 3. Podstawowe prawa elektrodynamiki i magnetyzmu 4. Zasady optyki geometrycznej
MiBM sem. III Zakres materiału wykładu z fizyki 1. Dynamika układów punktów materialnych 2. Elementy mechaniki relatywistycznej 3. Podstawowe prawa elektrodynamiki i magnetyzmu 4. Zasady optyki geometrycznej
PODSTAWY FIZYKI - WYKŁAD 1 WSTEP KINEMATYKA - OPIS RUCHU DYNAMIKA - OPIS ODDZIAŁYWAŃ. Piotr Nieżurawski.
 PODSTAWY FIZYKI - WYKŁAD 1 WSTEP KINEMATYKA - OPIS RUCHU DYNAMIKA - OPIS ODDZIAŁYWAŃ Piotr Nieżurawski pniez@fuw.edu.pl Wydział Fizyki Uniwersytet Warszawski http://www.fuw.edu.pl/~pniez/bioinformatyka/
PODSTAWY FIZYKI - WYKŁAD 1 WSTEP KINEMATYKA - OPIS RUCHU DYNAMIKA - OPIS ODDZIAŁYWAŃ Piotr Nieżurawski pniez@fuw.edu.pl Wydział Fizyki Uniwersytet Warszawski http://www.fuw.edu.pl/~pniez/bioinformatyka/
I. KARTA PRZEDMIOTU FIZYKA
 I. KARTA PRZEDMIOTU Nazwa przedmiotu: FIZYKA Kod przedmiotu: Mf 3 Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego 4 Kierunek: Nawigacja 5 Specjalność: Wszystkie specjalności na kierunku
I. KARTA PRZEDMIOTU Nazwa przedmiotu: FIZYKA Kod przedmiotu: Mf 3 Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego 4 Kierunek: Nawigacja 5 Specjalność: Wszystkie specjalności na kierunku
lim Np. lim jest wyrażeniem typu /, a
 Wykład 3 Pochodna funkcji złożonej, pochodne wyższych rzędów, reguła de l Hospitala, różniczka funkcji i jej zastosowanie, pochodna jako prędkość zmian 3. Pochodna funkcji złożonej. Jeżeli funkcja złożona
Wykład 3 Pochodna funkcji złożonej, pochodne wyższych rzędów, reguła de l Hospitala, różniczka funkcji i jej zastosowanie, pochodna jako prędkość zmian 3. Pochodna funkcji złożonej. Jeżeli funkcja złożona
Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc.
 Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc. ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przypuśćmy, że wszyscy ludzie na świecie zgromadzili się w jednym miejscu na Ziemi i na daną komendę jednocześnie
Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc. ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przypuśćmy, że wszyscy ludzie na świecie zgromadzili się w jednym miejscu na Ziemi i na daną komendę jednocześnie
Definicje i przykłady
 Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
ZASADY DYNAMIKI. Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał.
 ZASADY DYNAMIKI Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał Dynamika klasyczna zbudowana jest na trzech zasadach podanych przez Newtona w 1687 roku I zasada dynamiki Istnieją
ZASADY DYNAMIKI Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał Dynamika klasyczna zbudowana jest na trzech zasadach podanych przez Newtona w 1687 roku I zasada dynamiki Istnieją
Zadanie. Oczywiście masa sklejonych ciał jest sumą poszczególnych mas. Zasada zachowania pędu: pozwala obliczyć prędkość po zderzeniu
 Zderzenie centralne idealnie niesprężyste (ciała zlepiają się i po zderzeniu poruszają się razem). Jedno z ciał przed zderzeniem jest w spoczynku. Oczywiście masa sklejonych ciał jest sumą poszczególnych
Zderzenie centralne idealnie niesprężyste (ciała zlepiają się i po zderzeniu poruszają się razem). Jedno z ciał przed zderzeniem jest w spoczynku. Oczywiście masa sklejonych ciał jest sumą poszczególnych
PRZEDMIOTOWY SYSTEM OCENIANIA
 1 PRZEDMIOTOWY SYSTEM OCENIANIA Ogólne zasady oceniania zostały określone rozporządzeniem MEN (Rozporządzenie Ministra Edukacji Narodowej z dnia 16 sierpnia 2017 r. w sprawie oceniania, klasyfikowania
1 PRZEDMIOTOWY SYSTEM OCENIANIA Ogólne zasady oceniania zostały określone rozporządzeniem MEN (Rozporządzenie Ministra Edukacji Narodowej z dnia 16 sierpnia 2017 r. w sprawie oceniania, klasyfikowania
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka
 Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Prawa ruchu: dynamika
 Prawa ruchu: dynamika Spis treści 1 Bezwładność 2 I zasada dynamiki 2.1 Zasada bezwładności 2.2 Układ odniesienia 2.3 Ciało izolowane 2.4 Układ inercjalny 3 II zasada dynamiki 3.1 II prawo Newtona 3.2
Prawa ruchu: dynamika Spis treści 1 Bezwładność 2 I zasada dynamiki 2.1 Zasada bezwładności 2.2 Układ odniesienia 2.3 Ciało izolowane 2.4 Układ inercjalny 3 II zasada dynamiki 3.1 II prawo Newtona 3.2
2.6.3 Interferencja fal.
 RUCH FALOWY 1.6.3 Interferencja fal. Pojęcie interferencja odnosi się do fizycznych efektów nie zakłóconego nakładania się dwóch lub więcej ciągów falowych. Doświadczenie uczy, że fale mogą przebiegać
RUCH FALOWY 1.6.3 Interferencja fal. Pojęcie interferencja odnosi się do fizycznych efektów nie zakłóconego nakładania się dwóch lub więcej ciągów falowych. Doświadczenie uczy, że fale mogą przebiegać
Wstęp do równań różniczkowych
 Wstęp do równań różniczkowych Wykład 1 Lech Sławik Instytut Matematyki PK Literatura 1. Arnold W.I., Równania różniczkowe zwyczajne, PWN, Warszawa, 1975. 2. Matwiejew N.M., Metody całkowania równań różniczkowych
Wstęp do równań różniczkowych Wykład 1 Lech Sławik Instytut Matematyki PK Literatura 1. Arnold W.I., Równania różniczkowe zwyczajne, PWN, Warszawa, 1975. 2. Matwiejew N.M., Metody całkowania równań różniczkowych
ROZKŁAD MATERIAŁU Z FIZYKI - ZAKRES ROZSZERZONY
 ROZKŁAD MATERIAŁU Z FIZYKI - ZAKRES ROZSZERZONY AUTOR PROGRAMU EWA PRZYSIECKA WYDAWNICTWO OPERON NUMER PROGRAMU FIZR-01-08/13 PROGRAM OBEJMUJE OKRES NAUCZANIA w kl. II - IV TE oraz II-III LO LICZBA GODZIN
ROZKŁAD MATERIAŁU Z FIZYKI - ZAKRES ROZSZERZONY AUTOR PROGRAMU EWA PRZYSIECKA WYDAWNICTWO OPERON NUMER PROGRAMU FIZR-01-08/13 PROGRAM OBEJMUJE OKRES NAUCZANIA w kl. II - IV TE oraz II-III LO LICZBA GODZIN
Wykład FIZYKA I. 5. Energia, praca, moc. http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html. Dr hab. inż. Władysław Artur Woźniak
 Wykład FIZYKA I 5. Energia, praca, moc Dr hab. inż. Władysław Artur Woźniak Instytut Fizyki Politechniki Wrocławskiej http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html ENERGIA, PRACA, MOC Siła to wielkość
Wykład FIZYKA I 5. Energia, praca, moc Dr hab. inż. Władysław Artur Woźniak Instytut Fizyki Politechniki Wrocławskiej http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html ENERGIA, PRACA, MOC Siła to wielkość
SZCZEGÓŁOWE CELE EDUKACYJNE
 Program nauczania: Fizyka z plusem, numer dopuszczenia: DKW 4014-58/01 Plan realizacji materiału nauczania fizyki w klasie I wraz z określeniem wymagań edukacyjnych DZIAŁ PRO- GRA- MOWY Pomiary i Siły
Program nauczania: Fizyka z plusem, numer dopuszczenia: DKW 4014-58/01 Plan realizacji materiału nauczania fizyki w klasie I wraz z określeniem wymagań edukacyjnych DZIAŁ PRO- GRA- MOWY Pomiary i Siły
Tadeusz Lesiak. Dynamika punktu materialnego: Praca i energia; zasada zachowania energii
 Mechanika klasyczna Tadeusz Lesiak Wykład nr 4 Dynamika punktu materialnego: Praca i energia; zasada zachowania energii Energia i praca T. Lesiak Mechanika klasyczna 2 Praca Praca (W) wykonana przez stałą
Mechanika klasyczna Tadeusz Lesiak Wykład nr 4 Dynamika punktu materialnego: Praca i energia; zasada zachowania energii Energia i praca T. Lesiak Mechanika klasyczna 2 Praca Praca (W) wykonana przez stałą
VII.1 Pojęcia podstawowe.
 II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej
 MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/