AUTOMATYKA. dr hab. Andrzej Dębowski, prof. PŁ Instytut Automatyki
|
|
|
- Agata Skowrońska
- 9 lat temu
- Przeglądów:
Transkrypt
1 Kierunek: Transport AUTOMATYKA dr hab. Andrzej Dębowski, prof. PŁ Instytut Automatyki godz. przyjęć: wtorki 9 5 Instytut Automatyki, ul. Stefanowskiego 8/22 środy Zakład Techniki Sterowania, al. Politechniki Materiały Do pobrania Automatyka-Transport Instytut Automatyki PŁ / 247

2 Program wykładu Wprowadzenie Podstawowe pojęcia i definicje Liniowe układy ciągłe Pojęcie elementu liniowego Klasyczny opis matematyczny linowego procesu dynamicznego - Transmitancja operatorowa - Odpowiedź procesu liniowego na wymuszenie impulsowe i skokowe - Odpowiedź procesu liniowego na dowolny sygnał - Transmitancja widmowa - Charakterystyki częstotliwościowe - Typowe elementy linowe Opis dynamiki procesów metodą przestrzeni stanu - Równania wektorowo macierzowe procesu liniowego - Wyznaczanie równań wektorowo-macierzowych na podstawie transmitancji - Wyznaczanie macierzy transmitancji Instytut Automatyki PŁ 2 / 247

3 Program wykładu Przekształcanie schematów blokowych Stabilność liniowych układów ciągłych - Definicja i matematyczny warunek stabilności - Algebraiczne kryterium stabilności Routha - Graficzne kryterium stabilności yquista Jakość układów automatycznej regulacji Pojęcie jakości i sposoby korekcji układów automatycznej regulacji Podstawowe typy regulatorów o działaniu ciągłym Wykorzystanie korekcji w sprzężeniu zwrotnym do budowy regulatorów Regulacja statyczna i astatyczna Metody doboru nastaw regulatorów Klasyfikacja układów sterowania: - Podział ze względu na strukturę układu sterowania - Podział ze względu na posiadane informacje o procesie Liniowe układy dyskretne Funkcje dyskretne i równania różnicowe Przekształcenie Z i jego zastosowanie do rozwiązywania równań różnicowych Instytut Automatyki PŁ 3 / 247

4 Program wykładu Transmitancja dyskretna Opis dynamiki liniowych układów dyskretnych - Matematyczny model liniowego układu impulsowego - Odpowiedź ciągłego elementu dynamicznego z impulsatorem idealnym Układy regulacji dyskretnej - Algorytmy regulatorów cyfrowych - Transmitancja dyskretnego układu regulacji Stabilność liniowych układów dyskretnych Układy nieliniowe Charakterystyki statyczne układów nieliniowych - Podstawowe charakterystyki statyczne elementów nieliniowych - Wyznaczanie charakterystyk wypadkowych Metody analizy dynamiki układów nieliniowych - Linearyzacja opisu dynamiki elementu nieliniowego - Metoda płaszczyzny fazowej Instytut Automatyki PŁ 4 / 247

5 Program wykładu Układy logiczne Elementy algebry Boole a Funkcje i elementy logiczne Projektowanie układów kombinacyjnych Projektowanie układów sekwencyjnych Instytut Automatyki PŁ 5 / 247

6 Literatura podstawowa: Dębowski A.: Automatyka podstawy teorii, W T, Warszawa, 28, (22 II wyd.). Dębowski A.: Automatyka technika regulacji, Wyd.W T, Warszawa, 23 (w druku). Literatura uzupełniająca: Amborski K., Marusak A.: Teoria sterowania w ćwiczeniach, PW, Warszawa 978. Findeisen W.: Technika regulacji automatycznej, W T, Warszawa 978. Holejko D., Kościelny W., iewczas W.: Zbiór zadań z podstaw automatyki, Wyd.Politechniki Warszawskiej, Warszawa 975. Kaczorek T.: Teoria układów regulacji automatycznej, W T, Warszawa 977. de Larminat P., Thomas Y.: Automatyka układy liniowe, T. Sygnały i układy, T.2 Identyfikacja, T.3 Sterowanie, W T, Warszawa 983. Pełczewski W.: Teoria sterowania, W T, Warszawa 98. Mazurek J., Vogt H., Żydanowicz W.: Podstawy automatyki, Oficyna Wyd. Politechniki Warszawskiej, Warszawa 22. Węgrzyn S.: Podstawy automatyki, PW, Warszawa 972. Żelazny M.: Podstawy Automatyki, PW, Warszawa 976. Instytut Automatyki PŁ 6 / 247

7 Wprowadzenie Instytut Automatyki PŁ 7 / 247
8 Podstawowe pojęcia i definicje automatyka nauka o sterowaniu, sterowanie celowe oddziaływanie na wyodrębniony proces dynamiczny, sterowany proces dynamiczny obiekt sterowania, identyfikacja obiektu sterowania podanie matematycznego opisu modelu tego obiektu, sprzężenie zwrotne oddziaływanie skutku na przyczynę, czyli wpływ wyniku sterowania na to sterowanie, regulacja wykorzystanie sprzężenia zwrotnego do sterowania obiekt regulacji obiekt sterowany w oparciu o sprzężenie zwrotne elementy (człony) i sygnały schematy blokowe (schematy funkcjonalne) Instytut Automatyki PŁ 8 / 247
 i sygnały schematy blokowe (schematy funkcjonalne) Instytut Automatyki PŁ 8 /")
9 Wyróżniamy następujące grupy sygnałów: - sygnały wejściowe (sterujące) u (t), u 2 (t),..., u p (t) - sygnały wyjściowe (odpowiedzi) y (t), y 2 (t),..., y q (t) - sygnały zakłócające z (t), z 2 (t),..., y r (t) Ogólnie: p q r W najprostszym przypadku element ma jedno wejście jedno wyjście i nie podlega zakłóceniom. Instytut Automatyki PŁ 9 / 247
 Ogólnie: p q r W najprostszym przypadku element ma jedno wejście jedno")
10 Rozpatrzmy na wstępie układ napełniania wodą zbiornika przy użyciu zdalnie sterowanej pompy: Instytut Automatyki PŁ / 247

11 Układ automatycznego sterowania w systemie otwartym Układ nazywa się układem automatycznego sterowania w systemie otwartym (krótko: układem sterowania), gdy nie ma sprzężenia zwrotnego między czynnościami wykonywanymi, a czynnością rozkazodawczą. Przykładem układu sterowania w systemie otwartym jest podany wcześniej prosty układ sterowania poziomu wody w zbiorniku, gdzie nie ma powiązania między czynnościami wykonywanymi przez dalsze elementy z czynnościami wykonywanymi przez elementy początkowe nie ma powiązania wstecznego, a więc nie istnieje oddziaływanie zwrotne. W układzie tym, aby osiągnąć określony przyrost poziomu h należy włączyć pompę na czas t. Stosunek h/ t zależy od wydajności pompy i w podanym układzie może być w pewnym przybliżeniu przyjęty jako stały. Instytut Automatyki PŁ / 247

12 Układ automatycznego sterowania w systemie zamkniętym Układ nazywa się układem automatycznego sterowania w systemie zamkniętym (krótko: układem regulacji), gdy do sterowanie wykorzystane jest sprzężenie zwrotne, tzn. oddziaływanie wyjścia obiektu za pośrednictwem człowieka, lub innego specjalnie dobranego elementu dynamicznego (zwanego regulatorem) na wejście tego obiektu, polegające na tym, że sygnał odpowiedzi danego obiektu wpływa na kształtowanie sygnału sterującego tym obiektem. Przykładem regulacji może być omawiany poprzednio układ służący do napełniania zbiornika cieczą wówczas, gdy wskaźnik poziomu i nadajnik rozkazu (przyciski służące do sterowania stycznikiem) zostaną umieszczone obok siebie. Wówczas człowiek chcąc zmienić poziom cieczy o h nie będzie już musiał odmierzać czasu pracy pompy, lecz będzie bezpośrednio obserwował efekt swojego działania. Podejmowane decyzje wynikają z przeprowadzonego w umyśle porównania wartości rzeczywistej z wartością zadaną. O sposobie sterowania będzie decydował uchyb (błąd) regulacji. Instytut Automatyki PŁ 2 / 247

13 Jest to układ regulacji ręcznej. Człowiek pełni tu funkcje sumatora (detektora uchybu) oraz regulatora. Jeżeli człowiek zostanie zastąpiony urządzenie technicznym, to mówimy wówczas o układzie regulacji automatycznej. Układy sterowania wykorzystujące sprzężenie zwrotne nazywane są krótko układami zamkniętymi. Przykładem układu zamkniętego może być przedstawiony dalej układ automatycznej regulacji temperatury. Instytut Automatyki PŁ 3 / 247

14 Instytut Automatyki PŁ 4 / 247
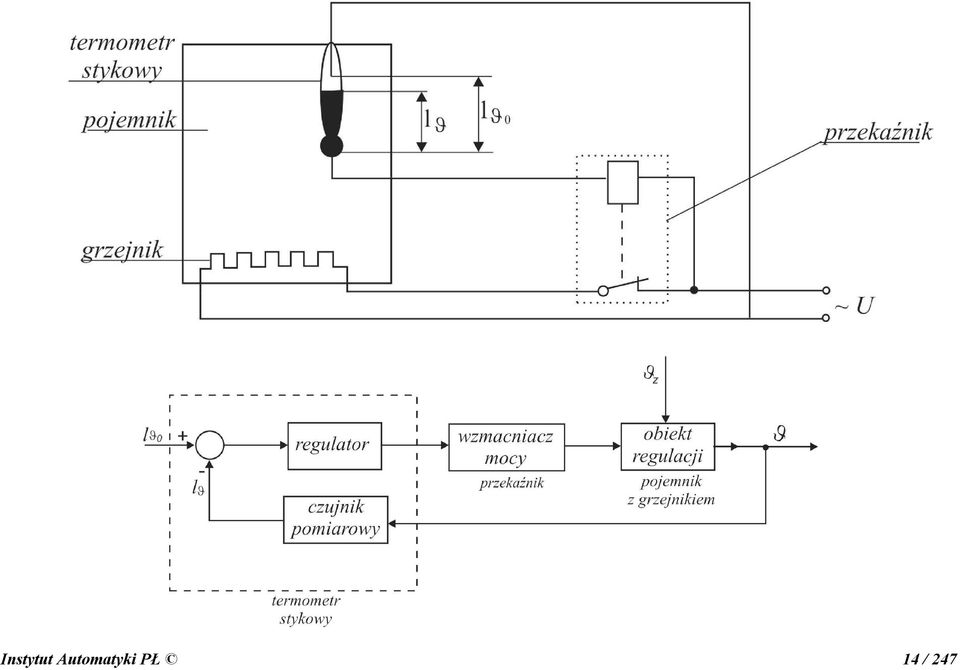
15 Zadaniem tego układu regulacji jest utrzymanie wewnątrz pojemnika stałej temperatury ϑ wyższej od temperatury otoczenia ϑ z. Rolę elementu zadającego, czujnika, sumatora i regulatora spełnia termometr stykowy, którego górna elektroda może być odpowiednio przesuwana. Przekaźnik, przerywający obwód zasilania grzejnika wówczas, gdy temperatura wewnątrz pojemnika ϑ przekroczy wartość zadaną ϑ, pełni funkcję wzmacniacza mocy i może być uważany za element wyjściowy regulatora. Wielkością regulowaną jest temperatura ϑ wewnątrz pojemnika, sterowaniem napięcie U zasilające grzejnik, a zakłóceniem zmieniająca się temperatura otoczenia ϑ z. Instytut Automatyki PŁ 5 / 247

16 Na powyższym rysunku zaznaczono następujące sygnały: y (t) wartość zadana, y(t) wartość rzeczywista e(t) = y (t) - y(t) uchyb regulacji, u(t) sygnał sterujący obiektem, z(t) zakłócenie. Węzeł sumacyjny (sumujący): Węzeł rozgałęźny (zaczepowy, informacyjny): Instytut Automatyki PŁ 6 / 247
: Węzeł rozgałęźny (zaczepowy, informacyjny):")
17 W układach zamkniętych występuje pętla sprzężenia zwrotnego obejmująca tor główny od węzła sumacyjnego do węzła rozgałęźnego i tor sprzężenia zwrotnego od węzła rozgałęźnego do węzła sumacyjnego (oczywiście postępując w kierunku przepływu sygnałów). Sprzężenie zwrotne może być dodatnie lub ujemne. Ze sprzężeniem zwrotnym mamy do czynienia gdy w procesie skutek oddziałuje na przyczynę, czyli innymi słowy sygnał wyjściowy sterowanego procesu ma wpływ na jego sygnał wejściowy. W układzie zamkniętym (gdzie obieg informacji odbywa się w pętli zamkniętej) występuje dodatnie sprzężenie zwrotne, jeżeli wzrost któregokolwiek z sygnałów w pętli po przejściu przez wszystkie elementy tworzące pętlę spowoduje dalsze zwiększanie wartości tego sygnału (tzn. gdy skutek wzmacnia przyczynę). W przeciwnym razie mamy do czynienia z ujemnym sprzężeniem zwrotnym. Ujemne sprzężenie zwrotne oznacza taki obieg informacji w pętli, że chwilowy wzrost któregokolwiek z sygnałów po przejściu przez wszystkie elementy tworzące pętlę pociąga za sobą kompensację tego wzrostu. Instytut Automatyki PŁ 7 / 247
 występuje dodatnie sprzężenie zwrotne, jeżeli wzrost któregokolwiek z sygnałów w pętli po przejściu przez wszystkie")
18 Liniowe układy ciągłe Instytut Automatyki PŁ 8 / 247

19 Dany jest układ dynamiczny: Pojęcie elementu liniowego u(t) y(t) y ( t ) = F{ u ( t ) } F gdzie: F operator (przekształcenie) przyporządkowujący sygnałowi wejściowemu u(t) określony sygnał wyjściowy y(t). Układ ten na sygnał u (t) doprowadzony przy pewnych warunkach początkowych odpowiedział sygnałem y (t), zaś na sygnał u 2 (t) doprowadzony przy tych samych warunkach początkowych odpowiedział sygnałem y 2 (t). Def. Układ ten jest nazywamy liniowym, jeżeli na sygnał odpowie sygnałem u ( t) = au( t) + bu2( t) { au ( t) + bu ( t) } = af{ u ( t) } + bf{ u ( t) } = ay ( t) by ( ) y ( t) = F t Instytut Automatyki PŁ 9 / 247
. Def.")
20 Zamiast dowolnie wybierać liczby a, b wybieramy dowolnie sygnały u, u 2. Dla układu linowego otrzymujemy zależność flin ( u + u2) = y + y2 = flin( u) + flin( u2) Dla układu nieliniowego (z nasyceniem) fniel ( u + u2) < y + y2 = fniel ( u) + fniel ( u2) Ogólnie dla każdego układu nieliniowego f niel ( u + u2) y + y2 = fniel ( u) + fniel ( u2) Instytut Automatyki PŁ 2 / 247
 y + y2 = fniel ( u) + fniel ( u2)")
21 Czasem element ma charakterystykę, która jest na pewnym odcinku liniowa, a w pozostałej części nieliniowa (np. krzywa magnesowania). I w tym obszarze element może być uważany za liniowy. II chociaż w tym obszarze przebieg charakterystyki jest także zbliżony do prostej, to rozważany element dla absolutnych wartości sygnałów: wejściowego i, oraz wyjściowego ρ jest oczy-wiście nieliniowy; może być natomiast uważany za liniowy w obszarze II, jeżeli wprowadzić odpowiednie przyrosty tych sygnałów: tzn. sygnałem wejściowym będzie u, zaś sygnałem wyjściowym y - stanowiące odchylenia od ustalonego punktu pracy znajdującego się w tym obszarze. Instytut Automatyki PŁ 2 / 247
22 Traktowanie elementów jako liniowych wymaga upraszczających założeń (ogólnie zakłada się, że parametry są stałe niezależnie od warunków pracy): dla elementów elektrycznych: zakłada się stałe wartości rezystancji, indukcyjności, pojemności niezależnie od napięcia i prądu. dla elementów mechanicznych: zakłada się, że są wykonane z materiałów idealnie twardych, że sprężyny mają charakterystyki liniowe i pomijalną masę, że siła tarcia jest proporcjonalna do prędkości w pierwszej potędze, że nie występują luzy ani zakleszczenia. dla elementów pneumatycznych: zakłada się stałe opory przy przepływie gazów (niezależnie od ciśnień), że gazy są idealnie ściśliwe o stałej wartości współczynnika sprężania. dla elementów hydraulicznych: zakłada się, że ciecze są idealnie nieściśliwe oraz, że opory przepływu są stałe niezależnie od prędkości. Instytut Automatyki PŁ 22 / 247
23 Klasyczny opis matematyczny procesu dynamicznego - Transmitancja operatorowa - Pojęcie funkcji impulsowej i funkcji jednostkowej - Odpowiedź impulsowa i odpowiedź jednostkowa - Odpowiedź na dowolny sygnał - Transmitancja widmowa - Charakterystyki częstotliwościowe - Typowe elementy linowe Instytut Automatyki PŁ 23 / 247
24 Instytut Automatyki PŁ 24 / 247 Transmitancja operatorowa W ogólnym przypadku element liniowy z jednym wejściem i z jednym wyjściem, w przypadku gdy dotyczy zjawiska o parametrach skupionych, jest opisany zwyczajnym równaniem różniczkowym n - tego rzędu z n - warunkami początkowymi ) ( ) ( ) ( gdzie : ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( n n m m m m m m n n n n n n y y y y y y t b u dt t du b dt t u d b dt t u d b t y a dt t dy a dt t y d a dt t y d a = = = = = K K K Z warunku realizowalności fizykalnej wynika założenie: n m u(t) Układ liniowy y(t)
25 Def. Transmitancją operatorową danego elementu liniowego nazywamy stosunek transformaty Laplace a sygnału wyjściowego do transformaty Laplace a sygnału wejściowego przy zerowych warunkach początkowych. Y ( s) G( s) = U ( s) gdy : y ( n ) ( ) = K y ( ) ( ) = y( ) = U(s) G(s) Y(s) Przekształcenie operatorowe Laplace a polega na przyporządkowaniu danej funkcji f(t) zmiennej rzeczywistej spełniającej pewne warunki, zwanej oryginałem, funkcji zmiennej zespolonej F(s), zwanej transformatą, określanej wzorem st F ( s) = L{ f ( t ) } = e f ( t) dt Instytut Automatyki PŁ 25 / 247
26 Jeżeli znana jest transformata F(s) funkcji f(t), to transformatę k-tej pochodnej tej funkcji można obliczyć następująco ( n ) ( ) n ( ) ( n ) ( + ) ( n 2 ) ( + ) n ( + = ) L{ f t } s F s f sf... s f Dla pochodnej pierwszego rzędu wzór ten przyjmuje postać ( ) df t + L{ } = s L{ f ( t ) } f ( ) dt Dokonując transformacji Laplace a obu stron równania różniczkowego opisującego dynamikę rozważanego układu i przyjmując zerowe warunki początkowe otrzymuje się a n s n Y n- ( s) + an- s Y ( s) a sy ( s) + ay ( s) = m m = b s U ( s) + b s U ( s) + + b su ( s) + b U ( s) m m... czyli po wyłączeniu ze wszystkich składników po obu stronach równania transformat sygnału wyjściowego i wejściowego n m ( s +... a s + a ) Y ( s) = ( b s b s + b ) U ( s) an m Instytut Automatyki PŁ 26 / 247
27 Korzystając z definicji transmitancji operatorowej otrzymujemy wzór ogólny na transmitancję operatorową liniowego układu dynamicznego w postaci funkcji wymiernej (tj. ilorazu dwóch wielomianów zmiennej s o współczynnikach rzeczywistych) G ( s) = Y U m ( s) bms bs + b = n ( s) ans as + a Tak zdefiniowana transmitancja dotyczy jedynie elementu z jednym wejściem i jednym wyjściem. Znajomość transmitancji pozwala bezpośrednio wyznaczyć odpowiedź układu na dowolny sygnał wejściowy, ale wyłącznie przy zerowych warunkach początkowych ( s ) = ( ) ( ) ( ) = ( ) ( ) Y G s U s y t L { G s U s } Instytut Automatyki PŁ 27 / 247
28 Odwrotne przekształcenie Laplace a określa wzór Riemana - Mellina st ( ) { } ( ) y t = L Y( s ) = e Y s ds 2 π j c+ jω c jω który ma jedynie znaczenie teoretyczne i nie stosuje się go w praktyce inżynierskiej. W zagadnieniach projektowania i badania układów automatyki korzysta się nie z powyższego wzoru, lecz z twierdzenia Heaviside a o rozkładzie, twierdzenie Borela o splocie, lub w oparciu o podstawowe właściwości przekształcenia Laplace a przy wykorzystaniu tablic zawierających zestawienia elementarnych funkcji czasu (oryginałów) i odpowiadających im transformat. Instytut Automatyki PŁ 28 / 247
29 Oryginał Dziedzina zmiennej rzeczywistej t (czasu) Oryginał u(t) Równanie różniczkowe y(t) Przekształcenie L{ } operatorowe przekształcenie L - { } Laplace a Odwrotne Laplace a U(s) Transmitancja operatorowa G(s) (równanie algebraiczne) Y(s) Transformata Dziedzina zmiennej zespolonej s (operatora) Transformata Instytut Automatyki PŁ 29 / 247
30 δ Transformaty Laplace a najczęściej spotykanych funkcji: ( t) ( t) Oryginał f(t) Transformata F(s) Oryginał f(t) Transformata F(s) t = = t t < = t e t n t at n at t e ( t) ( t) ( t) at a e ae ( t) ( e ) ( t) e b a at be a b at bt bt ( t ) ( t ) s 2 s n! n s + s + a n! n ( s + a ) + s s ( + a) ( s + a)( s + b) s ( s + a)( s + b) ( ) ( t) sin at ( ) ( t) cos at t sin ( at ) ( t) t cos( at ) ( t) bt e at t sin ( ) ( ) cos( ) ( ) bt e at t cos( at ) 2 a ( ) cos( at) cos( bt) ( t) 2 2 b a df ( t) ( s 2 + a 2 )( s 2 + b 2 ) + s F ( s) f ( ) dt gdzie: F ( s) = L{ f ( t )} Instytut Automatyki PŁ 3 / 247 s a + a 2 2 s s + a 2 a s ( s + b ) 2 s a ( s + b ) a 2 ( ) 2 2 s + b + a s + b ( ) 2 2 s + b + a 2 2 ( + a ) s s s
31 Pojęcie funkcji impulsowej i funkcji jednostkowej W wielu przypadkach w układach automatyki występują sygnały będące impulsami o znacznej amplitudzie i bardzo krótkim czasie trwania. W granicznym przypadku impuls taki może być przedstawiony przy pomocy funkcji impulsowej Diraca (inaczej zwanej δ - funkcją). W technice interpretujemy funkcję impulsową Diraca jako pochodną względem czasu funkcji jednostkowej (inaczej zwanej skokiem jednostkowym) δ(t) + t δ ( t) + δ = + ( t) dt = dla dla t t = t Instytut Automatyki PŁ 3 / 247 δ ( t) ( t) = d = ( t) dt dla dla t < t
32 Skoro wielkość δ(t) traktujemy jako wyidealizowany impuls o nieskończenie wielkiej amplitudzie i nieskończenie krótkim czasie trwania, to z fizycznego punktu widzenia wyłania się od razu możliwość przybliżenia wielkości δ(t) impulsami o skończonej amplitudzie i skończonym czasie trwania. Wybór ciągu funkcji aproksymujących nie jest jednoznaczny i może być oparty np. na przybliżeniu /ε δ (t, ε) ε t δ ( t, ε ) dla t < = dla t < ε ε dla t ε (t, ε) ε t ( t, ε ) = dla t < t dla t ε dla t ε < ε Instytut Automatyki PŁ 32 / 247
33 Punktem osobliwym, w którym występuje impuls Diraca może być dowolna chwila t >. Wówczas obowiązuje zapis δ(t-t ) + δ ( t - t ) t δ dla t t = + dla t = ( t t ) dt = ( t) t t t - (t-t ) δ ( t t ) ( t t ) dla t < t = dla t t d ( t t ) = dt t t Instytut Automatyki PŁ 33 / 247
34 Właściwość filtrowania dla funkcji przesuniętych w czasie o t się w postaci: f b a f ( t) δ ( t t ) = f ( t ) δ ( t t ) ( t) δ ( t t ) dt = f ( t ) gdy a t b zapisuje Transformaty funkcji przesuniętych w czasie można obliczyć tak jak poprzednio, opierając się na definicji przekształcenia operatorowego Laplace a, bądź korzystając z twierdzenia o przesunięciu rzeczywistym ( ) ( ) { } { ( )} ( ) F s = L f t L f t t = F s e st Stąd wynika: { δ ( )} st L t - t = e = e L{ ( t - t )} = e s st st Instytut Automatyki PŁ 34 / 247
35 Odpowiedź impulsowa i odpowiedź jednostkowa Y ( s) Z definicji transmitancji operatorowej: G( s) = gdzie: U ( s) Po wprowadzeniu oznaczeń: Y(s) = G(s)U(s) - dla odpowiedzi impulsowej: gdy u(t) = δ(t), to y(t) = g(t) - dla odpowiedzi jednostkowej: gdy u(t) = (t), to y(t) = h(t) i skorzystaniu z przekształcenia Laplace a, otrzymujemy: g h ( t) = L { G( s) δ ( s) } = L { G( s) } ( t) = L { G( s) ( s) } = L G( s) s { } { } ( ) = L u ( t) ( ) = L y ( t) U s Y s przy zerowych warunkach początkowych elementu można wyliczyć transformatę sygnału odpowiedzi na dane wymuszenie: Instytut Automatyki PŁ 35 / 247
36 Z ostatniego równania wynika związek: G(s) = sh(s) gdzie: H(s) = L{ h(t) } Z uwzględnienia właściwości przekształcenia Laplace a pochodnej funkcji przy zerowych warunkach poczatkowych wynika, że s jest operatorem różniczkowania, zaś /s operatorem całkowania. Stąd wypływa wniosek: ( ) t dh t g ( t) = lub inaczej h( t) = g ( τ ) dτ dt A więc w układzie liniowym odpowiedź impulsowa i jednostkowa są ze sobą związane poprzez operację różniczkowania lub całkowania. Instytut Automatyki PŁ 36 / 247
37 Odpowiedź na dowolny sygnał Znajomość odpowiedzi impulsowej lub jednostkowej przy zerowych wartościach początkowych pozwala wyznaczyć odpowiedź układu na dowolny sygnał. Wykorzystywane jest tu pojęcie splotu funkcji: f t t ( t) f2( t) = f( τ ) f2( t τ ) dτ = f( t τ ) f2( τ ) dτ Przekształcenie Laplace a splotu ma następującą właściwość (tw.borela): { } { } ( ) = ( ) ( ) = ( ) F s L f t F s L f t 2 { ( ) 2 ( )} ( ) 2 ( ) L f t f t = F s F s Ponieważ transformata odpowiedzi układu na dowolny sygnał przy zerowych warunkach początkowych ma postać Y(s) = G(s)U(s) to gdy znana jest odpowiedź impulsowa elementu g(t), postać czasową odpowiedzi układu na dowolny sygnał można obliczyć ze wzoru y( t) = t g ( τ ) u( t τ ) dτ = g( t τ ) u( τ ) dτ Instytut Automatyki PŁ 37 / 247 t
38 W wielu przypadkach duże korzyści przy szybkim wyznaczeniu wartości sygnału w chwili początkowej (t=) lub w stanie ustalonym (t ) daje posłużenie się twierdzeniami granicznymi: h y y + ( ) = lim sy ( s) s ( ) = lim sy ( s) s Ponieważ transformata odpowiedzi jednostkowej H(s) związana jest z transmitancją układu podaną wcześniej prostą zależnością, to przy wyznaczaniu wartości granicznych odpowiedzi jednostko-wej wystarczy ograniczyć się do badania samej transmitancji analizowanego układu: + ( ) = lim sh ( s) = limg( s) h s ( ) = lim sh ( s) = limg( s) s s s Instytut Automatyki PŁ 38 / 247
39 Przykład Wyznaczyć i naszkicować przebieg sygnału wyjściowego y(t) podanego elementu liniowego dla sygnału wejściowego: u( t ) = ( t ) + st U(s) k Y(s) przy zerowym warunku początkowym, korzystając z definicji transmitancji i rachunku operatorowego oraz dla porównania - na podstawie definicji splotu dwóch funkcji. Rozwiązanie Y( s ) k Na podstawie definicji transmitancji operatorowej: G( s ) = = U( s ) + st uwzględniając transformatę sygnału wejściowego: U( s ) = L { ( t )} = s wyznaczyć można wzór na transformatę odpowiedzi, który można rozłożyć na ułamki proste: G( s ) k kt k Y ( s) = G( s )U ( s) = = H( s ) = = + s ( + st ) s + st s Z tablic przekształcenia Laplace a odczytano: t kt T k dla t : L = ke oraz L = k + st s Instytut Automatyki PŁ 39 / 247
40 czyli: t y( t ) k e T = h(t) k Z definicji splotu: Odpowiedź impulsowa: Wartość odpowiedzi w chwili t 2 jest równa polu powierzchni paska otrzymanego po wymnożeniu sygnałów w chwilach t [, t 2 ] T ( ) ( ) y t = L G( s )U s = g( τ )u( t τ )dτ u( t τ ) { } t T g( t ) = L G( s ) = L = e y(t) { } k k T t k + st u( t 2 τ ) t 2 g( τ ) k T y( t ) = g( τ )u( t τ )dτ 2 2 t t < t 2 > τ Instytut Automatyki PŁ 4 / 247
41 Instytut Automatyki PŁ 4 / 247 Transmitancja widmowa Dany jest układ liniowy opisany równaniem różniczkowym n-tego rzędu Ze względu na liniowość tego równania można przyjąć, że sygnał wyjściowy y(t) rozważanego układu, otrzymamy po przyłożeniu na jego wejście sygnału u(t), będzie miał postać zawierającą dwie składowe u(t) Układ liniowy y(t) ) ( t y ) ( t y ) ( t y w p + = gdzie: składowa przejściowa, składowa wymuszona. (t) y p y w (t) ) ( ) ( ) ( gdzie : ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( n n m m m m m m n n n n n n y y y y y y t b u dt t du b dt t u d b dt t u d b t y a dt t dy a dt t y d a dt t y d a = = = = = K K K
42 W liniowych układach obowiązuje zasada superpozycji, tj. sumowania się efektów poszczególnych oddziaływań występujących niezależnie. Jednym oddziaływaniem na rozważany układ jest obecność sygnału wejściowego, zaś jako drugie oddziaływanie można uznać niezerowe warunki początkowe. Składowa wymuszona sygnału wyjściowego y w( t ) związana jest z sygnałem wejściowym u( t ) rozważanego układu dynamicznego. Natomiast składowa przejściowa y p (t) sygnału wyjściowego stanowi rozwiązanie tzw. uproszczonego równania różniczkowego (nazywanego również równaniem ruchu swobodnego) pobudzonego niezerowymi warunkami początkowymi n d y p ( t) dy p ( t) an a + a y p ( t) = n dt dt i jej przebieg zależy wyłącznie od warunków początkowych układu. W układzie stabilnym składowa przejściowa zanika z upływem czasu do zera i o postaci sygnału wyjściowego decyduje wówczas składowa wymuszona. Instytut Automatyki PŁ 42 / 247
43 Jeżeli do wejścia układu przyłączymy sygnał sinusoidalny o postaci u ( t) = U m sin( ω t + ϕ ) to zgodnie z metodą przewidywań (stosowaną do rozwiązywania zwyczajnych liniowych równań różniczkowych) składowa wymuszona będzie miała także postać funkcji sinusoidalnej y w ( t) = Y sin( ω t + ϕ ) m Def. Transmitancją widmową układu liniowego nazywamy wielkość określoną jako stosunek wartości zespolonej składowej wymuszonej odpowiedzi wywołanej wymuszeniem sinusoidalnym, do wartości zespolonej tego wymuszenia. Y ( jω) G( jω) = U ( jω) u y gdzie: jϕ u U(jω ) = U e, Y ( jω) = Y m m e jϕ y. Instytut Automatyki PŁ 43 / 247
44 Transmitancja widmowa jest wielkością zespoloną zależną od parametrów układu i pulsacji wymuszenia. Przy ustalonej amplitudzie U m i fazie początkowej ϕ u sinusoidalnego sygnału wejściowego u(t) może być więc zapisana w postaci jϕ ( ω ) G ( jω) = A( ω) e gdzie: Ym ( ω) A( ω) =, ϕ( ω) = ϕ y ( ω) ϕu. U m Wielkość ) - określa stosunek amplitud, natomiast ϕ ω - wielkość przesunięcie fazowe składowej wymuszonej sygnału wyjściowego względem sygnału wejściowego. Bez straty ogólności można przyjąć, że faza początkowa sygnału wejściowego jest równa zeru ( ϕ u = ). Wartości zespolone sygnału wejściowego i składowej wymuszonej sygnału wyjściowego wyrazić można wzorami A(ω ( ) U Y jϕu ( jω) = U me = Um gdyż jϕ n jϕ ( ω ) ( jω) = Y e = U A( ω ) e m m ϕ = u Instytut Automatyki PŁ 44 / 247
45 Sygnały sinusoidalne można przedstawić w postaci wykładniczej na podstawie wzoru Eulera e e jx jx = cos x + j sin x = cos x j sin x e sin x = Podstawienie sygnałów w tej postaci do równania różniczkowego opisującego rozważany układ i wykonanie przekształceń pozwala otrzymać zależność m jϕ ( ω ) bm ( ) ( jω ) b jω + b A ω e = n a jω a jω + a n ( ) Ponieważ wcześniej wykazano, że transmitancja operatorowa wyraża się wzorem m Y ( ) ( s) bms bs + b G s = = n U s a s a s + a ( ) n jϕ ( ω ) stąd wynika wniosek, że transmitancję widmową G ( jω) = A( ω) e otrzymujemy podstawiając s = jω do wzoru na transmitancję operatorową. jx e 2 j jx Instytut Automatyki PŁ 45 / 247
46 Wniosek: Transmitancję widmową formalnie otrzymujemy podstawiając s = jω do wyrażenia na transmitancję operatorową G(s). W interpretacji geometrycznej na płaszczyźnie Gaussa (płaszczyźnie zmiennej zespolonej) transmitancja widmowa oznacza przekształcenie osi urojonej w charakterystykę amplitudowo-fazową. Instytut Automatyki PŁ 46 / 247
47 Charakterystyki częstotliwościowe Charakterystykami częstotliwościowymi nazywamy graficzne przedstawienie transmitancji widmowej G(jω ) przy zmianach pulsacji ω. Przy ustalonej wartości pulsacji transmitancja widmowa jest liczbą zespoloną i może być przedstawiona w postaci algebraicznej jako gdzie: lub w postaci wykładniczej gdzie: G(j ω ) = P + ( ω ) = Re[ G( jω )], Q( ω ) G( jω) P = Im[ ]. jϕ ( ω ) ( jω ) A( ω ) e G = ( ω ) = G( jω), ϕ( ω ) arg G( jω). A = ( ω) jq( ω) Pomiędzy postacią algebraiczną i wykładniczą istnieją następujące związki: 2 2 A( ω ) = P ( ω ) + Q ( ω ) P( ω) = A( ω) cos( ϕ( ω)) Q ( ) ( ω) ϕ ω = arctg Q( ω) = A( ω)sin( ϕ( ω)) P ω ( ) Instytut Automatyki PŁ 47 / 247
48 Graficznie transmitancja widmowa G(jω ) przedstawia sobą zbiór punktów na płaszczyźnie zmiennej zespolonej otrzymanych dla różnych wartości pulsacji w należących do przedziału (, ). Ponieważ zachodzą przy tym zależności P Q ( ω ) = P( ω) A( ω ) = A( ω ) ( ω ) = Q( ω ) ϕ( ω ) = ϕ ( ω) [ ) to sporządzanie wykresów wystarczy ograniczyć do przedziału ω,. Wykreślnie można przedstawiać nie tylko transmitancję, ale również jej wielkości składowe P( ω ),Q( ω ), A( ω ), ϕ( ω ). Do opisu dynamiki elementów wchodzących w skład układów automatyki w praktyce najczęściej stosuje się charakterystyki amplitudowofazowe G(jω ) oraz amplitudowe A (ω) i fazowe ϕ(ω ). Nazwy amplitudowa i fazowa biorą się stąd, że jeśli sygnał wejściowy ma postać sinusoidy o amplitudzie równej i fazie początkowej równej, to po przejściu przez element o transmitancji widmowej G(jω ), amplituda sygnału wyjściowego równa jest modułowi transmitancji widmowej A(ω), zaś faza początkowa tego sygnału równa jest argumentowi transmitancji widmowej ϕ(ω). Instytut Automatyki PŁ 48 / 247
49 Przykład 3 Dany jest element I-go rzędu (proporcjonalno-całkujący) opisany transmitancją operatorową: + st G ( s) = k + = k gdzie k >, T >. st st Wyznaczyć podstawowe charakterystyki częstotliwościowe tego elementu. Rozwiązanie Transmitancję widmową otrzymujemy podstawiając s=jω do wzoru na transmitancję operatorową: G ( jω ) Dla postaci algebraicznej: - część rzeczywista - część urojona = k + = k jωt j ωt = k k P = = T ω Q ( ω ) Re k j k ( ω ) = Im k j k ωt = k j ωt k ωt Instytut Automatyki PŁ 49 / 247
50 Dla postaci wykładniczej: - moduł A ωt ( ω ) = k j = k j = k + 2 ωt ω 2 T - argument ϕ( ω) = arg k j = arg k + arg j = ωt ωt = + arctg = arctg ωt ωt Na podstawie otrzymanych wzorów wykreślić można poszczególne charakterystyki częstotliwościowe. W celu szybkiego naszkicowania charakterystyk należy w powyższych wzorach wyznaczyć wartości graniczne poszczególnych wielkości dla ω oraz dla ω, a następnie w miarę potrzeby zbadać dokładniej ich przebiegi w funkcji ω. Charakterystykę amplitudowo-fazową szkicuje się zbierając na jednym rysunku informacje o wszystkich składowych dotyczących transmitancji widmowej wyrażanej w postaci algebraicznej jak i wykładniczej. Instytut Automatyki PŁ 5 / 247
51 charakterystyka amplitudowo-fazowa: Instytut Automatyki PŁ 5 / 247
52 charakterystyka amplitudową charakterystyka fazowa Dla charakterystyk: amplitudowej i fazowej, w przypadku gdy oś odciętych (pulsacji) przedstawiana jest w skali logarytmicznej używa się nazw: logarytmiczna charakterystyka amplitudowa i logarytmiczna charakterystyka fazowa. Ponadto dla logarytmicznej charakterystyki amplitudowej wartość wzmocnienia (w decybelach [db]) odkładane na osi rzędnych obliczane są według wzoru L ω = 2 log A ω ( ) ( ) przy czym: log oznacza funkcję logarytmiczną przy podstawie. Instytut Automatyki PŁ 52 / 247
53 Przykład 4 Dla elementu z poprzedniego przykładu, dla którego transmitancja widmowa ma postać: ( ) ( + jωt ) G jω = k jωt należy naszkicować charakterystyki logarytmiczne amplitudową i fazową. Rozwiązanie Logarytmiczna charakterystyka amplitudowa opisana jest wzorem: L natomiast logarytmiczna charakterystyka fazowa ma postać: ( ω) = 2 log G( jω ) ϕ = 2 log k + 2 log + = 2 log k + 2 log ( ωt ) L 3 ω 2 L Charakterystyki logarytmiczne aproksymujemy liniami łamanymi. Instytut Automatyki PŁ 53 / 247 ( ω ) + jωt 2 log 2 ( ω ) L ( ) jωt 2 logωt = k 2 = 2 log + 2 log + ( ωt ) 2 logω T ( ω ) = arg + arg( + jωt ) arg( jω ) = ϕ { ( ω ) k T + arctg ωt 4243 ϕ 2 ( ω ) π { 2 ϕ 3 ( ω ) = =
54 We wzorze opisującym charakterystykę amplitudową, składniki L ( ω ) i L 3 ( ω ) są dokładnie prostymi i nie wymagają stosowania żadnej aproksymacji: L ( ω ) jest prostą poziomą, natomiast L 3 ( ω ) prostą o nachyleniu ujemnym wynoszącym -2 db/dek. Dekadą (dek) nazywamy odcinek o długości jednostkowej na osi pulsacji ω wyrażanej w skali logarytmicznej dziesiętnej. Odpowiada to - ciokrotnej zmianie pulsacji wyznaczających początek i koniec takiego odcinka. Jeśli pulsacje wyznaczające odcinek różnią się dwukrotnie to taki odcinek nazywamy oktawą. Podane wyżej nachylenie prostej można policzyć. Jeżeli wartość pulsacji wzrośnie -ciokrotnie, czyli ω 2 = ω, to na charakterystyce L 3 ( ω ) wzmocnienie zmieni się następująco ( ω ) ( ω ) ( 2 ω ) ( 2 ω ) ( 2 ω ) ( 2 ω ) L L = log log = log log = = 2log 2logω + 2log ω = 2 db czyli rzeczywiście zmniejszy się o 2 db. Instytut Automatyki PŁ 54 / 247
55 Aby aproksymować prostymi charakterystykę L 2 ( ) ω rozważamy 2 przypadki: - przypadek I: Jest to prosta o nachyleniu +2 db/dek przechodząca przez punkt ω = T odciętych. - przypadek II: 2 2 << ω T czyli ω >> W tym przypadku jest to prosta pokrywająca się z osią odciętych. Popełniany największy błąd dotyczy punktu ω = T i wynosi T T 2 2 ( ω ) 2 log ω T = 2 logωt, przy czym dla ω = : L ( ω) db L2 2 = L 2 2 >> ω T czyli ω << 2 T ( ω ) 2 log = 2 log db L 2 = ( ω ) = L ( ω ) db = 2 log + ( ω T ) T 2 T = 2 log T T + = log 2 3dB 2 = T na osi Instytut Automatyki PŁ 55 / 247
56 Z charakterystyką amplitudową L 2 związana jest charakterystyka fazowa ϕ 2 ( ω). Dla ω = π przesunięcie fazowe wynosi: ϕ T 2( ωt ) = arctg( ) = T 4 W celu wykreślenia poszukiwanych charakterystyk przyjęto dane liczbowe: k =, T =,. ( ) ω Logarytmiczna amplitudowa charakterystyka częstotliwościowa: Instytut Automatyki PŁ 56 / 247
57 Logarytmiczna fazowa charakterystyka częstotliwościowa: Maksymalne błędy popełniane przy aproksymowaniu charakterystyki fazowej liniami łamanymi: - przy aproksymacji styczną ϕ max =, 74 (w punktach załamania: ω T = / 4, 8 oraz ω T = 4, 8 ) T T 2 - przy aproksymacji sieczna ϕ max = 5, 7 (w punktach załamania: ω T = / oraz ω T = ) T T 2 Instytut Automatyki PŁ 57 / 247
58 Typowe elementy linowe Typowymi elementami liniowymi nazywamy podstawowe człony dynamiczne, z których w wyniku szeregowego połączenia można utworzyć układy bardziej skomplikowane. u(t) Typowy element liniowy y(t) Klasyfikacja równań dynamiki i transmitancji operatorowych typowych elementów liniowych: a) Element proporcjonalny: b) Element inercyjny I-go rzędu: y ( t) = ku( t) G ( s) = k ( t) + y( t) ku( t) G( s) dy T = dt k = + st Instytut Automatyki PŁ 58 / 247
59 c) Element całkujący idealny: dy dt d) Element całkujący rzeczywisty: 2 d y t dy t T = ku t 2 dt dt e) Element różniczkujący idealny: f) Element różniczkujący rzeczywisty: g) Element inercyjny II-go rzędu: ( t) = ku( t) ( s) G = ( ) ( ) + ( ) G( s) du ( ) ( t) y t = k G ( s) = ks dt ( t) du ( ) ( t) + y t k G( s) dy T = dt dt ( t) dy ( ) ( t) + T + T + y( t) ku( t) G( s) 2 d y T T2 2 2 dt = dt Instytut Automatyki PŁ 59 / 247 = k s s k ( + st ) ks = + st = k ( + st )( + ) st 2
60 h) Element oscylacyjny (drgający): 2 d y dt 2 T 2 i) Element opóźniający: ( t) dy( t) + 2ξ T + y( t) = ku( t) ( s) y dt G 2 2 = T st ( t) = ku( t T ) G( s) = ke s k + 2ξTs + Dla podanych elementów należy umieć samodzielnie wyznaczyć: odpowiedź jednostkową h(t), odpowiedź impulsową g(t), charakterystyki częstotliwościowe: amplitudowo-fazową G(jω ), amplitudową A(ω ), fazową ϕ(ω ), oraz logarytmiczne charakterystyki częstotliwościowe: amplitudową L(ω ), fazową ϕ(ω ). Instytut Automatyki PŁ 6 / 247
61 Przekształcanie schematów blokowych W skomplikowanych procesach dynamicznych, o rozbudowanej strukturze powiązań między rozmaitymi sygnałami, łatwiej jest określić transmitancje elementarne wiążące te sygnały niż transmitancję wypadkową. Wyznaczenie transmitancji wypadkowej może być dokonane wówczas w oparciu o przekształcenie schematu blokowego, opisującego strukturę rozważanego procesu dynamicznego. Dzięki wprowadzeniu pojęcia transmitancji operatorowej, dynamika takiego procesu opisana jest układem równań algebraicznych. Transmitancja wypadkowa może być znaleziona w wyniku przekształcenia układu równań polegającego na rugowaniu zbędnych sygnałów. Uwaga: W podanych dalej przykładach, dla uproszczenia i skrócenia zapisu, w oznaczeniach transmitancji i sygnałów pominięto symbole argumentu (mogą to być więc transmitancje operatorowe, lub transmitancje widmowe i odpowiadające im transformaty sygnałów). Instytut Automatyki PŁ 6 / 247
62 Połączenie szeregowe dwóch członów x p xp = G x y = G2x p z tych równań rugujemy sygnał x p Transmitancja wypadkowa połączenia szeregowego dwóch transmitancji jest równa iloczynowi tych transmitancji. y = G G x czyli 2 y Gwypadkowa = = G G = G G x 2 2 Instytut Automatyki PŁ 62 / 247
63 Połączenie równoległe dwóch członów y = G x y2 = G2x y = y y 2 z tych równań rugujemy sygnały y, y 2 Transmitancja wypadkowa połączenia równoległego dwóch transmitancji jest równa sumie algebraicznej tych transmitancji (z uwzględnieniem odpowiednich znaków). ( ) y = G x G x = G G x 2 2 y Gwypadkowa = = G G x 2 Instytut Automatyki PŁ 63 / 247
64 Połączenie dwóch członów ze sprzężeniem zwrotnym Transmitancja wypadkowa połączenia dwóch transmitancji ze sprzężeniem zwrotnym wyraża się wzorem: y = Ge xs = G2 y e = x x s z tych równań rugujemy sygnały e ( ) ( ) y = G x x s y = G x + ( )G y 2 y = G x + ( )G G y 2 ( ) ( )G G y = G x y 2 G oraz xs G G = = = x ( )G G 2 + G G 2 wypadkowa transmitancja w torze glownym G wypadkowa = wypadkowa transmitancja w petli sprzęzenia Instytut Automatyki PŁ 64 / 247
65 y = G w y2 = G2w4 w3 = G4 y w2 = G3 y2 w = x + w2 w = x w z tych równań rugujemy sygnały w,w 2,w 3,w4 Poszukujemy rozwiązania w postaci: y = G x + G w = G x + G G y y = G x + G w = G x + G G y G G2 y = Gx gdzie G = G2 G22 Instytut Automatyki PŁ 65 / 247
66 y = G x + G w = G x + G G y y = G x + G w = G x + G G y Powyższy układ równań należy uporządkować względem niewiadomych y i y 2 G 2 G 4 y y GG + 3 y y 2 2 = Gx = G x 2 2 Jedną z metod rozwiązania układu równań liniowych (szczególnie nadającą się do zastosowania w układach o niewielkiej liczbie niewiadomych) są wzory Kramera, pozwalające bezpośrednio wyznaczyć poszukiwane niewiadome. W tym celu obliczamy potrzebne wyznaczniki = 2 = = 2 G G G G x 2 2 x 4 2 G G 4 G G G 2 G G G x x = + G G G G = G x = G 2 x G G G G G G x 3 x 2 Instytut Automatyki PŁ 66 / 247
67 y y 2 Ze wzorów Kramera otrzymaliśmy: G GG2G = = x + 2 GG2G 4 = = x + 3 x 2 G2 x 2 Poszukujemy rozwiązania w postaci: G G2 y = Gx gdzie G = G2 G22 y = G x + G x 2 2 y = G x + G x Czyli rozwiązanie ma postać: G G 2 = = G + G G G G GG 2G4 + G G G G 3 4 4,, G G 2 22 GG 2G3 = + G G G G G = + G G G G Łatwo sprawdzić, że poszczególne transmitancje można obliczyć od razu patrząc na schemat blokowy i korzystając ze wzoru wyprowadzonego w przykładzie dla połączenia bloków ze sprzężeniem zwrotnym, np.: G 2 y wypadkowa transmitancja w torze glownym G2G3G x wypadkowa transmitancji w petli sprzęzenia G G G G ( ) = = = Instytut Automatyki PŁ 67 / 247
68 Połączenie szeregowe (łańcuchowe) Połączenie równoległe Sprzężenie zwrotne a) dodatnie b) ujemne Instytut Automatyki PŁ 68 / 247
69 Zmiana kolejności a) członów b) węzłów rozgałęźnych (zaczepowych) c) węzłów sumacyjnych (sumujących) Przesuwanie węzła rozgałęźnego (zaczepowego) Instytut Automatyki PŁ 69 / 247
70 Przesuwanie węzła sumacyjnego (sumującego) Przesuwanie a) węzła rozgałęźnego przed sumacyjny b) węzła sumacyjnego przed rozgałęźny Instytut Automatyki PŁ 7 / 247
71 Przykład Należy przesunąć węzeł zaczepowy Z za transmitancję G 2 i kolejno zwijać pętle sprzężeń zwrotnych. (zaczynając od pętli wewnętrznej na najbardziej zagłębionej, zawierającej połączenie równoległe transmitancji) G = y x = 2 4 G G 4 + G G + G + G G + G G G 2 G Instytut Automatyki PŁ 7 / 247
72 Stabilność liniowych układów ciągłych - Definicja i matematyczny warunek stabilności - Algebraiczne kryteria stabilności - Graficzne kryteria stabilności Instytut Automatyki PŁ 72 / 247
73 Definicja i matematyczny warunek stabilności Dynamika układu liniowego z jednym wyjściem może być opisana równaniem n d y( t) dy( t) + K+ a + a y( t) = f ( t) n dt dt gdzie: f(t) suma wymuszeń działających na układ an Odpowiedź układu y(t) stanowi sumę składowej przejściowej odpowiedzi wywołanej niezerowymi warunkami początkowymi oraz składowej wymuszonej związanej z postacią działających na układ sygnałów zewnętrznych y(t) = y p (t) + yw(t) Jeżeli na układ nie działają żadne wymuszenia (taki układ nazywamy autonomicznym) to f(t) = yw( t ) = i w sygnale wyjściowym układu występuje wyłącznie składowa przejściowa y(t) = Instytut Automatyki PŁ 73 / 247 y p (t)
74 Dynamikę układu autonomicznego opisuje więc równanie (tzw. równanie drgań własnych lub równanie ruchu swobodnego) o postaci n d y( t) dy( t) an + K+ a + a y( t) = n dt dt Układ nazywamy stabilnym, jeżeli rozwiązanie y(t) równania ruchu swobodnego tego układu odpowiadające dowolnym warunkom początkowym dąży do zera gdy t lim y( t) = t Aby otrzymać rozwiązanie ogólne równania ruchu swobodnego należy znaleźć pierwiastki wielomianu charakterystycznego (czyli rozwiązanie równania charakterystycznego) - niewiadoma jest tu oznaczona literą s, które ma postać n a s as + a n = Powyższe równanie w dziedzinie liczb zespolonych ma zawsze rozwiązanie w postaci n pierwiastków (w szczególności mogą one być liczbami rzeczywistymi). Pierwiastki mogą być: rzeczywiste (gdy część urojona jest równa zeru) lub zespolone (występują zawsze parami, stanowiąc liczby sprzężone, tzn. takie że części rzeczywiste są takie same a części urojone różnią się jedynie znakiem). Instytut Automatyki PŁ 74 / 247
75 W przypadku, gdy s, s2, K, sn są pierwiastkami jednokrotnymi, rozwiązanie ogólne równania ruchu swobodnego jest sumą składników o charakterze funkcji wykładniczych zmiennej zespolonej y ( t) = n k = c k e s k t gdzie: c k stałe całkowania, zależne od warunków początkowych układu. Dla pierwiastków wielokrotnych np. gdy pierwiastek sk ma krotność mk, w podanym wzorze odpowiedni składnik należy zastąpić wyrażeniem: ( c k + c t + K+ c k k( m ) k t ( m k ) ) e s k t W dalszych rozważaniach ograniczymy się wyłącznie do przypadku pierwiastków jednokrotnych (otrzymany wniosek będzie słuszny również, gdy wystąpią pierwiastki wielokrotne). Dalej pokazane zostanie jak wyglądają przebiegi funkcji czasu stanowiących jeden ze składników podanej wyżej odpowiedzi układu związanego z pierwiastkiem s k równania charakterystycznego. Instytut Automatyki PŁ 75 / 247
76 Wykres składnika odpowiedzi przejściowej związanego z pojedynczym pierwiastkiem rzeczywistym równania charakterystycznego s k = γ Składowa sygnału wyjściowego związana z tym pierwiastkiem wyraża się wzorem: γt y ( t) = c e gdzie: stała całkowania k k c k Instytut Automatyki PŁ 76 / 247
77 Wykres składnika odpowiedzi przejściowej związanego z parą pierwiastków zespolonych sprzężonych równania charakterystycznego sk = α + jβ Składowa sygnału wyjściowego sk = α jβ związana z tym pierwiastkiem wyraża się wzorem: y αt t) = Y e sin( βt + ϕ ) gdzie: Y,ϕ nowe stałe całkowania k ( k k k k Instytut Automatyki PŁ 77 / 247
78 Wykres składnika odpowiedzi przejściowej związanego z parą pierwiastków urojonych równania charakterystycznego sk = jω Składowa sygnału wyjściowego sk = jω związana z tym pierwiastkiem wyraża się wzorem: y k ( t) = Yk sin( ω t + ϕk ) gdzie: Y,ϕ k k nowe stałe całkowania Instytut Automatyki PŁ 78 / 247
79 Jeżeli układ ma być asymptotycznie stabilny to warunek lim y( t) t = musi być spełniony przy dowolnych warunkach początkowych układu. Będzie to możliwe wtedy i tylko wtedy, gdy lim y ( t ) = t tzn. gdy asymptotycznie do zera będzie zanikał każdy ze składników odpowiedzi układu. Twierdzenie Warunkiem koniecznym i wystarczającym asymptotycznej stabilności układu liniowego jest, by wszystkie pierwiastki równania charakterystycznego (bieguny wypadkowej transmitancji operatorowej tego układu) miały części rzeczywiste ujemne, czyli na płaszczyźnie zmiennej zespolonej s leżały w lewej półpłaszczyźnie. k Instytut Automatyki PŁ 79 / 247
80 Aby określić stabilność danego procesu dynamicznego dla którego znane jest równanie charakterystyczne, nie jest konieczne rozwiązywanie tego równania, by móc powiedzieć, czy jego wszystkie pierwiastki leżą w lewej półpłaszczyźnie płaszczyzny zmiennej zespolonej (nazywanej także płaszczyzną Gaussa). W tym celu opracowane zostały specjalne kryteria pozwalające stwierdzić stabilność rozważanego procesu dynamicznego na podstawie: a) badania wielomianu charakterystycznego transmitancji wypadkowej: kryterium Routh a, kryterium Hurwitza, kryterium Michajłowa. b) badania charakterystyki amplitudowo-fazowej układu otwartego (z przeciętą główną pętlą sprzężenia zwrotnego) kryterium Nuqista. Badanie takie jest prostsze niż obliczenie wartości pierwiastków tego równania. Analityczne wzory ogólne istnieją jedynie dla wielomianów stopnia nie wyższego niż trzeci (tzw. wzory Cardana), a obliczenia na drodze numerycznej są dosyć skomplikowane. Instytut Automatyki PŁ 8 / 247
81 Algebraiczne kryteria stabilności Kryteria algebraiczne polegają na analitycznym badaniu współczynników równania charakterystycznego. Warunkiem koniecznym stabilności układu, tzn. warunkiem koniecznym do tego, by wszystkie pierwiastki tego równania leżały w lewej półpłaszczyźnie jest, aby: ) wszystkie współczynniki a n,k, a, a miały ten sam znak, 2) wszystkie współczynniki a,k, a, a były różne od zera. n Warunek wystarczający stabilności oparty na pewnych pomocniczych obliczeniach algebraicznych został niezależnie podany przez Routh a i przez Hurwitza i oba te sposoby badania stabilności układów o znanej transmitancji wypadkowej należą do powszechnie znanych i stosowanych w automatyce. Oba sformułowania tego warunku związane są z różnymi nakładami obliczeń. Dla przykładu zostanie tu przedstawione kryterium Routh a. Instytut Automatyki PŁ 8 / 247
82 Kryterium Routh a Współczynniki wielomianu charakterystycznego należy zapisać w postaci dwóch wierszy: a a n n a n 2 a n 3 a a n 4 n 5 K K Tablica Routh a W celu określenia stabilności układu należy zbadać znaki elementów znajdujących się w pierwszej kolumnie s a a a n n n 2 n 4 n s an an 3 an 5 n 2 s b b2 b3 n 3 s c c2 c3 K K L 3 s d d2 2 s e e2 s f s g K K K K L L Pierwsza kolumna Instytut Automatyki PŁ 82 / 247
83 Instytut Automatyki PŁ 83 / 247 Kolejne współczynniki w tablicy Routh a oblicza się ze wzorów: L ; a a a a a b ; a a a a a b n n n n n n n n n n = = ; ; n n n n a a a a b b b b c c b b = = L e e d f e e e d d f = = = ; L L L e f e f f f e e g = = =
84 Podsumowanie: Autonomiczny układ dynamiczny, określony równaniem charakterystycznym n a s as + a n = jest stabilny wtedy i tylko wtedy, gdy spełnione są warunki ) i 2), oraz gdy wszystkie współczynniki pierwszej kolumny tablicy Routh a mają ten sam znak. Jeżeli układ jest niestabilny, to ilość zmian znaku w pierwszej kolumnie jest równa ilości pierwiastków w prawej półpłaszczyźnie, tj. pierwiastków z dodatnią częścią rzeczywistą. Instytut Automatyki PŁ 84 / 247
85 Graficzne kryteria stabilności Kryteria te pozwalają orzekać o położeniu pierwiastków równania charakterystycznego w oparciu o graficzną analizę przebiegu pewnych wykresów: - kryterium Michajłowa polegające na badaniu położenia wykresu funkcji M(jω), gdzie M(s) jest wielomianem charakterystycznym układu zamkniętego (mianownikiem transmitancji wypadkowej), - kryterium Nyquista polegające na orzekaniu o stabilności układu z ujemnym sprzężeniem zwrotnym na podstawie badania charakterystyki amplitudowo-fazowej G (jω), gdzie G (s) jest transmitancją operatorową układu otwartego (z przeciętą pętlą ujemnego sprzężenia zwrotnego). Dalej zostanie przedstawione najczęściej wykorzystywane przez inżynierów kryterium yquista Instytut Automatyki PŁ 85 / 247
86 Kryterium yquista Kryterium to pozwala ocenić stabilność układu zamkniętego ze sprzężeniem zwrotnym na podstawie znajomości charakterystyki amplitudowo-fazowej układu otwartego. G ( s ) = G( s )H( s ) L ( s ) G ( s ) = gdzie m n M ( s ) Z poprzednich rozważań wiadomo, że o stabilności układu zamkniętego będzie decydował mianownik transmitancji wypadkowej: G( s ) G( s ) ( s ) = = + G( s ) H( s ) + G ( s ) G z Instytut Automatyki PŁ 86 / 247
87 Instytut Automatyki PŁ 87 / 247 z M (s) L ( s ) M (s) = +. ) ( ) ( ) ( ; ) ( ) ( ) ( s M s L s H s M s L s G H H G G = = ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( s M s L s M s L s G s H s G s G s G H H G G z + = + = ) ( ) ( ) ( ) ( ) ( ) ( s M s M s M s L s L s L H G H G = = ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( s L s M s M s L s L s M s M s M s M s L s L s M s M s G s M s L s G s G H G H G G G z + = + = + = + = Warto zauważyć, że w układach realizowanych fizykalnie stopień równania charakterystycznego układu otwartego M (s) jest dokładnie taki sam jak stopień równania charakterystycznego układu zamkniętego M z (s), czyli n. Twierdzenie: Dowód. Po wprowadzeniu oznaczeń dokonujemy przekształceń
88 Rozważmy funkcję: L ( s ) L ( s ) + M ( s ) M z( s ) + = + = = M ( s ) M ( s ) M ( s ) [ G ( s )] Wielomiany charakterystyczne układu zamkniętego i otwartego można zawsze przedstawić w postaci iloczynowej [ + G ( s) ] a = a n n ( s s ( s s )( s s )( s s ) K( s s ) K( s s Po podstawieniu s = jω i można określić przyrost argumentu dla zmiany pulsacji ω + [ ] arg + G ( j ω ) = argm ( j ω ) argm ( j ω ) = z ω + ω + ω + n Z tej zależności można korzystać jeśli potrafimy wypowiedzieć się na temat stabilności układu otwartego. z zk ω + ω + k = k = z2 2 = arg( jω s ) arg( jω s ) n zn n ) ) k Instytut Automatyki PŁ 88 / 247
89 Jeżeli układ otwarty jest stabilny, to pierwiastki jego równania charakterystycznego leżą w lewej półpłaszczyźnie, czyli jak wynika z kryterium Michajłowa arg ω + ( jω) nπ M = Ponieważ warunkiem koniecznym i wystarczającym stabilności układu zamkniętego jest analogicznie z ( ) arg M jω = nπ ω + to po uwzględnieniu obu powyższych warunków w wyprowadzonej poprzednio zależności otrzymujemy arg ω + [ + G ( jω )] = nπ nπ = Instytut Automatyki PŁ 89 / 247
90 Jeżeli układ otwarty jest niestabilny, to część pierwiastków jego równania charakterystycznego leży w prawej półpłaszczyźnie, czyli arg M ω + ( jω) = ( n 2m)π gdzie: m liczba pierwiastków układu otwartego leżąca w prawej półpłaszczyźnie. Ponieważ warunkiem koniecznym i wystarczającym stabilności układu zamkniętego jest analogicznie to po uwzględnieniu obu powyższych warunków w wyprowadzonej poprzednio zależności otrzymujemy arg ω + z ( ) arg M jω = nπ ω + [ + G ( jω )] = nπ ( n 2m) π = 2mπ = m2π Instytut Automatyki PŁ 9 / 247
91 Podsumowanie: Warunkiem koniecznym i wystarczającym stabilności układu z ujemnym sprzężeniem zwrotnym jest: ) dla układu otwartego stabilnego - by charakterystyka amplitudowo-fazowa układu otwartego nie obejmowała punktu (-, j), 2) dla układu otwartego niestabilnego - by charakterystyka amplitudowofazowa układu otwartego obejmowała punkt (-, j) i okrążała go tyle razy, ile pierwiastków układu otwartego leży w prawej półpłaszczyźnie. ( ) Ze względu na symetrię wykresu G jω względem osi rzeczywistych przedział zmian ω można zmniejszyć o połowę, czyli ω,+. Wówczas matematyczny zapis kryterium Nyquista przyjmie postać: 2 ) arg[ + G ( jω) ] ω ) arg[ + G ( jω) ] = mπ ω = [ ) Instytut Automatyki PŁ 9 / 247
92 Interpretacja geometryczna kryterium Nyquista. Instytut Automatyki PŁ 92 / 247
93 Transmitancja układu otwartego: G ( s) gdzie: = k ( + st )( + st2 ) ( + st )( + st )( + st ) T < T < T < T < T Układ ten po zamknięciu sprzężenia zwrotnego będzie stabilny. Instytut Automatyki PŁ 93 / 247
94 Jakość układów automatycznej regulacji Instytut Automatyki PŁ 94 / 247
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Teoria sterowania - studia niestacjonarne AiR 2 stopień
 Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Transmitancje układów ciągłych
 Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Stabilność. Krzysztof Patan
 Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Podstawowe człony dynamiczne
 . Człon proporcjonalny 2. Człony całkujący idealny 3. Człon inercyjny Podstawowe człony dynamiczne charakterystyki czasowe = = = + 4. Człony całkujący rzeczywisty () = + 5. Człon różniczkujący rzeczywisty
. Człon proporcjonalny 2. Człony całkujący idealny 3. Człon inercyjny Podstawowe człony dynamiczne charakterystyki czasowe = = = + 4. Człony całkujący rzeczywisty () = + 5. Człon różniczkujący rzeczywisty
Systemy. Krzysztof Patan
 Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
AUTOMATYKA. dr hab. Andrzej Dębowski, prof. PŁ Instytut Automatyki PŁ
 Kierunek: Transport AUTOMATYKA dr hab. Andrzej Dębowski, prof. PŁ Instytut Automatyki PŁ godz. przyjęć: wtorki 9 5, biuro Instytutu Automatyki, bud. A, ul. Stefanowskiego 8/22 - I piętro, pok. 3 środy
Kierunek: Transport AUTOMATYKA dr hab. Andrzej Dębowski, prof. PŁ Instytut Automatyki PŁ godz. przyjęć: wtorki 9 5, biuro Instytutu Automatyki, bud. A, ul. Stefanowskiego 8/22 - I piętro, pok. 3 środy
przy warunkach początkowych: 0 = 0, 0 = 0
 MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Układ regulacji automatycznej (URA) kryteria stabilności
 kryteria stabilności") Układ regulacji automatycznej (URA) kryteria stabilności y o e G c (s) z z 2 u G o (s) y () = () ()() () H(s) oraz jego wartością w stanie ustalonym. Transmitancja układu otwartego regulacji: - () = ()
Układ regulacji automatycznej (URA) kryteria stabilności y o e G c (s) z z 2 u G o (s) y () = () ()() () H(s) oraz jego wartością w stanie ustalonym. Transmitancja układu otwartego regulacji: - () = ()
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności obiektów automatyzacji, Wpływ sprzężenia zwrotnego na stabilność obiektów Kierunek studiów: Transport,
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności obiektów automatyzacji, Wpływ sprzężenia zwrotnego na stabilność obiektów Kierunek studiów: Transport,
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Plan wykładu. Własności statyczne i dynamiczne elementów automatyki:
 Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów
 ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów. Cel ćwiczenia Badanie układów pierwszego rzędu różniczkującego, całkującego
ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów. Cel ćwiczenia Badanie układów pierwszego rzędu różniczkującego, całkującego
Technika regulacji automatycznej
 Technika regulacji automatycznej Wykład 2 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 56 Plan wykładu Schematy strukturalne Podstawowe operacje na schematach
Technika regulacji automatycznej Wykład 2 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 56 Plan wykładu Schematy strukturalne Podstawowe operacje na schematach
Ćwiczenie nr 6 Charakterystyki częstotliwościowe
 Wstęp teoretyczny Ćwiczenie nr 6 Charakterystyki częstotliwościowe 1 Cel ćwiczenia Celem ćwiczenia jest wyznaczenie charakterystyk częstotliwościowych układu regulacji oraz korekta nastaw regulatora na
Wstęp teoretyczny Ćwiczenie nr 6 Charakterystyki częstotliwościowe 1 Cel ćwiczenia Celem ćwiczenia jest wyznaczenie charakterystyk częstotliwościowych układu regulacji oraz korekta nastaw regulatora na
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
PODSTAWY AUTOMATYKI. Analiza w dziedzinie czasu i częstotliwości dla elementarnych obiektów automatyki.
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI Analiza w dziedzinie czasu i częstotliwości dla elementarnych obiektów automatyki. Materiały pomocnicze do
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI Analiza w dziedzinie czasu i częstotliwości dla elementarnych obiektów automatyki. Materiały pomocnicze do
Tematyka egzaminu z Podstaw sterowania
 Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
PAiTM. materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż.
 PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa.
 VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa. W rozdziale tym zajmiemy się dokładniej badaniem stabilności rozwiązań równania różniczkowego. Pojęcie stabilności w
VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa. W rozdziale tym zajmiemy się dokładniej badaniem stabilności rozwiązań równania różniczkowego. Pojęcie stabilności w
Podstawy Automatyki. Wykład 2 - modelowanie matematyczne układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Badanie stabilności liniowych układów sterowania
 Badanie stabilności liniowych układów sterowania ver. 26.2-6 (26-2-7 4:6). Badanie stabilności liniowych układów sterowania poprzez analizę równania charakterystycznego. Układ zamknięty liniowy i stacjonarny
Badanie stabilności liniowych układów sterowania ver. 26.2-6 (26-2-7 4:6). Badanie stabilności liniowych układów sterowania poprzez analizę równania charakterystycznego. Układ zamknięty liniowy i stacjonarny
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Podstawy Automatyki. Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 część 1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 część 1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Podstawy Automatyki. Wykład 2 - modelowanie matematyczne układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Sterowanie Serwonapędów Maszyn i Robotów
 Wykład 3.1 - Modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje,
Wykład 3.1 - Modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje,
Przekształcanie schematów blokowych. Podczas ćwiczenia poruszane będą następujące zagadnienia:
 Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Część 1. Transmitancje i stabilność
 Część 1 Transmitancje i stabilność Zastosowanie opisu transmitancyjnego w projektowaniu przekształtników impulsowych Istotne jest przewidzenie wpływu zmian w warunkach pracy (m. in. v g, i) i wielkości
Część 1 Transmitancje i stabilność Zastosowanie opisu transmitancyjnego w projektowaniu przekształtników impulsowych Istotne jest przewidzenie wpływu zmian w warunkach pracy (m. in. v g, i) i wielkości
Transmitancje i charakterystyki częstotliwościowe. Krzysztof Patan
 Transmitancje i charakterystyki częstotliwościowe Krzysztof Patan Transmitancja systemu czasu ciągłego Przekształcenie Laplace a systemu czasu ciągłego jest superpozycją składowych pochodzących od wymuszenia
Transmitancje i charakterystyki częstotliwościowe Krzysztof Patan Transmitancja systemu czasu ciągłego Przekształcenie Laplace a systemu czasu ciągłego jest superpozycją składowych pochodzących od wymuszenia
PODSTAWY AUTOMATYKI. MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
Rys. 1 Otwarty układ regulacji
 Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
4. Właściwości eksploatacyjne układów regulacji Wprowadzenie. Hs () Ys () Ws () Es () Go () s. Vs ()
 Ys () Ws () Es () Go () s. Vs ()") 4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Podstawy Automatyki. Wykład 2 - matematyczne modelowanie układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - matematyczne modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - matematyczne modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 4 WYZNACZANIE CHARAKTERYSTYK CZĘSTOTLIWOŚCIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia jest doświadczalne
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 4 WYZNACZANIE CHARAKTERYSTYK CZĘSTOTLIWOŚCIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia jest doświadczalne
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ. T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
 T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia") REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ Y o (s) - E(s) B(s) /T I s K p U(s) Z(s) G o (s) Y(s) T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ Y o (s) - E(s) B(s) /T I s K p U(s) Z(s) G o (s) Y(s) T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
Przeksztacenie Laplace a. Krzysztof Patan
 Przeksztacenie Laplace a Krzysztof Patan Wprowadzenie Transformata Fouriera popularna metoda opisu systemów w dziedzinie częstotliwości Transformata Fouriera umożliwia wykonanie wielu użytecznych czynności:
Przeksztacenie Laplace a Krzysztof Patan Wprowadzenie Transformata Fouriera popularna metoda opisu systemów w dziedzinie częstotliwości Transformata Fouriera umożliwia wykonanie wielu użytecznych czynności:
Stabilność II Metody Lapunowa badania stabilności
 Metody Lapunowa badania stabilności Interesuje nas w sposób szczególny system: Wprowadzamy dla niego pojęcia: - stabilności wewnętrznej - odnosi się do zachowania się systemu przy zerowym wejściu, czyli
Metody Lapunowa badania stabilności Interesuje nas w sposób szczególny system: Wprowadzamy dla niego pojęcia: - stabilności wewnętrznej - odnosi się do zachowania się systemu przy zerowym wejściu, czyli
Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji
 Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji Opracowanie: mgr inż. Krystian Łygas, inż. Wojciech Danilczuk Na podstawie materiałów Prof. dr hab.
Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji Opracowanie: mgr inż. Krystian Łygas, inż. Wojciech Danilczuk Na podstawie materiałów Prof. dr hab.
W celu obliczenia charakterystyki częstotliwościowej zastosujemy wzór 1. charakterystyka amplitudowa 0,
 Bierne obwody RC. Filtr dolnoprzepustowy. Filtr dolnoprzepustowy jest układem przenoszącym sygnały o małej częstotliwości bez zmian, a powodującym tłumienie i opóźnienie fazy sygnałów o większych częstotliwościach.
Bierne obwody RC. Filtr dolnoprzepustowy. Filtr dolnoprzepustowy jest układem przenoszącym sygnały o małej częstotliwości bez zmian, a powodującym tłumienie i opóźnienie fazy sygnałów o większych częstotliwościach.
Projektowanie układów regulacji w dziedzinie częstotliwości. dr hab. inż. Krzysztof Patan, prof. PWSZ
 Projektowanie układów regulacji w dziedzinie częstotliwości dr hab. inż. Krzysztof Patan, prof. PWSZ Wprowadzenie Metody projektowania w dziedzinie częstotliwości mają wiele zalet: stabilność i wymagania
Projektowanie układów regulacji w dziedzinie częstotliwości dr hab. inż. Krzysztof Patan, prof. PWSZ Wprowadzenie Metody projektowania w dziedzinie częstotliwości mają wiele zalet: stabilność i wymagania
Laboratorium z automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z automatyki Algebra schematów blokowych, wyznaczanie odpowiedzi obiektu na sygnał zadany, charakterystyki częstotliwościowe Kierunek studiów:
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z automatyki Algebra schematów blokowych, wyznaczanie odpowiedzi obiektu na sygnał zadany, charakterystyki częstotliwościowe Kierunek studiów:
Dystrybucje, wiadomości wstępne (I)
") Temat 8 Dystrybucje, wiadomości wstępne (I) Wielkości fizyczne opisujemy najczęściej przyporządkowując im funkcje (np. zależne od czasu). Inną drogą opisu tych wielkości jest przyporządkowanie im funkcjonałów
Temat 8 Dystrybucje, wiadomości wstępne (I) Wielkości fizyczne opisujemy najczęściej przyporządkowując im funkcje (np. zależne od czasu). Inną drogą opisu tych wielkości jest przyporządkowanie im funkcjonałów
Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych
 Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
Automatyka i robotyka
 Automatyka i robotyka Wykład 6 - Odpowiedź częstotliwościowa Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 37 Plan wykładu Wprowadzenie Podstawowe człony
Automatyka i robotyka Wykład 6 - Odpowiedź częstotliwościowa Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 37 Plan wykładu Wprowadzenie Podstawowe człony
Definicja i własności wartości bezwzględnej.
 Równania i nierówności z wartością bezwzględną. Rozwiązywanie układów dwóch (trzech) równań z dwiema (trzema) niewiadomymi. Układy równań liniowych z parametrem, analiza rozwiązań. Definicja i własności
Równania i nierówności z wartością bezwzględną. Rozwiązywanie układów dwóch (trzech) równań z dwiema (trzema) niewiadomymi. Układy równań liniowych z parametrem, analiza rozwiązań. Definicja i własności
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Podstawy Automatyki. Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 cz.1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 cz.1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
LINIOWE UKŁADY DYSKRETNE
 LINIOWE UKŁADY DYSKRETNE Współczesne układy regulacji automatycznej wyposażone są w regulatory cyfrowe, co narzuca konieczność stosowania w ich analizie i syntezie odpowiednich równań dynamiki, opisujących
LINIOWE UKŁADY DYSKRETNE Współczesne układy regulacji automatycznej wyposażone są w regulatory cyfrowe, co narzuca konieczność stosowania w ich analizie i syntezie odpowiednich równań dynamiki, opisujących
Transformata Laplace a to przekształcenie całkowe funkcji f(t) opisane następującym wzorem:
 opisane następującym wzorem:") PPS 2 kartkówka 1 RÓWNANIE RÓŻNICOWE Jest to dyskretny odpowiednik równania różniczkowego. Równania różnicowe to pewne związki rekurencyjne określające w sposób niebezpośredni wartość danego wyrazu ciągu.
PPS 2 kartkówka 1 RÓWNANIE RÓŻNICOWE Jest to dyskretny odpowiednik równania różniczkowego. Równania różnicowe to pewne związki rekurencyjne określające w sposób niebezpośredni wartość danego wyrazu ciągu.
Podstawy Automatyki Zbiór zadań dla studentów II roku AiR oraz MiBM
 Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Liczby zespolone. x + 2 = 0.
 Liczby zespolone 1 Wiadomości wstępne Rozważmy równanie wielomianowe postaci x + 2 = 0. Współczynniki wielomianu stojącego po lewej stronie są liczbami całkowitymi i jedyny pierwiastek x = 2 jest liczbą
Liczby zespolone 1 Wiadomości wstępne Rozważmy równanie wielomianowe postaci x + 2 = 0. Współczynniki wielomianu stojącego po lewej stronie są liczbami całkowitymi i jedyny pierwiastek x = 2 jest liczbą
Z-ZIP-103z Podstawy automatyzacji Basics of automation
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 01/013 Z-ZIP-103z Podstawy automatyzacji Basics of automation A. USYTUOWANIE MODUŁU
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 01/013 Z-ZIP-103z Podstawy automatyzacji Basics of automation A. USYTUOWANIE MODUŁU
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
4. UKŁADY II RZĘDU. STABILNOŚĆ. Podstawowe wzory. Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat. Transmitancja układu zamkniętego
 4. UKŁADY II RZĘDU. STABILNOŚĆ Podstawowe wzory Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat (4.1) Transmitancja układu zamkniętego częstotliwość naturalna współczynnik tłumienia Odpowiedź
4. UKŁADY II RZĘDU. STABILNOŚĆ Podstawowe wzory Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat (4.1) Transmitancja układu zamkniętego częstotliwość naturalna współczynnik tłumienia Odpowiedź
Przekształcenie Z. Krzysztof Patan
 Przekształcenie Z Krzysztof Patan Wprowadzenie Przekształcenie Laplace a można stosować do sygnałów i systemów czasu ciągłego W przypadku sygnałów czy systemów czasu dyskretnego do wyznaczenia transmitancji
Przekształcenie Z Krzysztof Patan Wprowadzenie Przekształcenie Laplace a można stosować do sygnałów i systemów czasu ciągłego W przypadku sygnałów czy systemów czasu dyskretnego do wyznaczenia transmitancji
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Podstawy Automatyki. Wykład 3 - Charakterystyki częstotliwościowe, podstawowe człony dynamiczne. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 3 -, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp określają zachowanie się elementu (układu) pod wpływem ciągłych sinusoidalnych sygnałów wejściowych. W analizie
Wykład 3 -, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp określają zachowanie się elementu (układu) pod wpływem ciągłych sinusoidalnych sygnałów wejściowych. W analizie
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 3 BADANIE CHARAKTERYSTYK CZASOWYCH LINIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia są pomiary i analiza
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 3 BADANIE CHARAKTERYSTYK CZASOWYCH LINIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia są pomiary i analiza
Kształcenie w zakresie podstawowym. Klasa 2
 Kształcenie w zakresie podstawowym. Klasa 2 Poniżej podajemy umiejętności, jakie powinien zdobyć uczeń z każdego działu, aby uzyskać poszczególne stopnie. Na ocenę dopuszczającą uczeń powinien opanować
Kształcenie w zakresie podstawowym. Klasa 2 Poniżej podajemy umiejętności, jakie powinien zdobyć uczeń z każdego działu, aby uzyskać poszczególne stopnie. Na ocenę dopuszczającą uczeń powinien opanować
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transform
 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 5 BADANIE STABILNOŚCI UKŁADÓW ZE SPRZĘŻENIEM ZWROTNYM 1. Cel ćwiczenia Celem ćwiczenia jest ugruntowanie
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 5 BADANIE STABILNOŚCI UKŁADÓW ZE SPRZĘŻENIEM ZWROTNYM 1. Cel ćwiczenia Celem ćwiczenia jest ugruntowanie
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
1. Liczby zespolone. Jacek Jędrzejewski 2011/2012
 1. Liczby zespolone Jacek Jędrzejewski 2011/2012 Spis treści 1 Liczby zespolone 2 1.1 Definicja liczby zespolonej.................... 2 1.2 Postać kanoniczna liczby zespolonej............... 1. Postać
1. Liczby zespolone Jacek Jędrzejewski 2011/2012 Spis treści 1 Liczby zespolone 2 1.1 Definicja liczby zespolonej.................... 2 1.2 Postać kanoniczna liczby zespolonej............... 1. Postać
FUNKCJE ZESPOLONE Lista zadań 2005/2006
 FUNKJE ZESPOLONE Lista zadań 25/26 Opracowanie: dr Jolanta Długosz Liczby zespolone. Obliczyć wartości podanych wyrażeń: (2 + ) ( ) 2 4 i (5 + i); b) (3 i)( 4 + 2i); c) 4 + i ; d) ( + i) 4 ; e) ( 2 + 3i)
FUNKJE ZESPOLONE Lista zadań 25/26 Opracowanie: dr Jolanta Długosz Liczby zespolone. Obliczyć wartości podanych wyrażeń: (2 + ) ( ) 2 4 i (5 + i); b) (3 i)( 4 + 2i); c) 4 + i ; d) ( + i) 4 ; e) ( 2 + 3i)
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Dobór parametrów układu regulacji, Identyfikacja parametrów obiektów dynamicznych Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Dobór parametrów układu regulacji, Identyfikacja parametrów obiektów dynamicznych Kierunek studiów: Transport, Stacjonarne
Automatyzacja. Ćwiczenie 9. Transformata Laplace a sygnałów w układach automatycznej regulacji
 Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Inżynieria Systemów Dynamicznych (4)
") Inżynieria Systemów Dynamicznych (4) liniowych (układów) Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 2 WE OKREŚLO 3 ASYMPTO 4 DYNAMICZ
Inżynieria Systemów Dynamicznych (4) liniowych (układów) Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 2 WE OKREŚLO 3 ASYMPTO 4 DYNAMICZ
3. FUNKCJA LINIOWA. gdzie ; ół,.
 1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
Podstawy Automatyki. Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2015 cz.1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2015 cz.1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7
 Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Definicje i przykłady
 Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Funkcje liniowe i wieloliniowe w praktyce szkolnej. Opracowanie : mgr inż. Renata Rzepińska
 Funkcje liniowe i wieloliniowe w praktyce szkolnej Opracowanie : mgr inż. Renata Rzepińska . Wprowadzenie pojęcia funkcji liniowej w nauczaniu matematyki w gimnazjum. W programie nauczania matematyki w
Funkcje liniowe i wieloliniowe w praktyce szkolnej Opracowanie : mgr inż. Renata Rzepińska . Wprowadzenie pojęcia funkcji liniowej w nauczaniu matematyki w gimnazjum. W programie nauczania matematyki w
Wstęp do analizy matematycznej
 Wstęp do analizy matematycznej Andrzej Marciniak Zajęcia finansowane z projektu "Rozwój i doskonalenie kształcenia na Politechnice Poznańskiej w zakresie technologii informatycznych i ich zastosowań w
Wstęp do analizy matematycznej Andrzej Marciniak Zajęcia finansowane z projektu "Rozwój i doskonalenie kształcenia na Politechnice Poznańskiej w zakresie technologii informatycznych i ich zastosowań w
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II
 ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II POZIOM ROZSZERZONY Równania i nierówności z wartością bezwzględną. rozwiązuje równania i nierówności
ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II POZIOM ROZSZERZONY Równania i nierówności z wartością bezwzględną. rozwiązuje równania i nierówności
Ćwiczenie 3 BADANIE OBWODÓW PRĄDU SINUSOIDALNEGO Z ELEMENTAMI RLC
 Ćwiczenie 3 3.1. Cel ćwiczenia BADANE OBWODÓW PRĄD SNSODANEGO Z EEMENTAM RC Zapoznanie się z własnościami prostych obwodów prądu sinusoidalnego utworzonych z elementów RC. Poznanie zasad rysowania wykresów
Ćwiczenie 3 3.1. Cel ćwiczenia BADANE OBWODÓW PRĄD SNSODANEGO Z EEMENTAM RC Zapoznanie się z własnościami prostych obwodów prądu sinusoidalnego utworzonych z elementów RC. Poznanie zasad rysowania wykresów
PODSTAWOWE CZŁONY DYNAMICZNE
 PODSTAWOWE CZŁONY DYNAMICZNE Człon podstawowy jest to element przetwarzający wprowadzony do niego sygnał wejściowy x(t) na sygnał wyjściowy y(t) w sposób elementarny. Przetwarzanie elementarne oznacza,
PODSTAWOWE CZŁONY DYNAMICZNE Człon podstawowy jest to element przetwarzający wprowadzony do niego sygnał wejściowy x(t) na sygnał wyjściowy y(t) w sposób elementarny. Przetwarzanie elementarne oznacza,
FUNKCJA LINIOWA - WYKRES
 FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (Postać kierunkowa) Funkcja liniowa jest podstawowym typem funkcji. Jest to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości
FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (Postać kierunkowa) Funkcja liniowa jest podstawowym typem funkcji. Jest to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Rys 1 Schemat modelu masa- sprężyna- tłumik
 Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].