WPROWADZENIE DO SLAM MAREK MALINOWSKI MIWL 2013 AOS BEZMIECHOWA
|
|
|
- Alina Leśniak
- 7 lat temu
- Przeglądów:
Transkrypt
1 WPROWADZENIE DO SLAM MAREK MALINOWSKI MIWL 3 AOS BEZMIECHOWA
2 SPIS TREŚCI SLAM co o jes? Zasosowanie, możiwości EKF Po co nam fir Kamana? Mode sanowy Rozkład normany Podsawowe wzory Linearyzacja SLAM wersja EKF Podsawowe równania Punky orienacyjne Zasada działania Możiwości, ograniczenia Podsumowanie Ineresująca ieraura
3 SLAM - DEFINICJA Simuaneous Locaizaion And Mapping Robo bez jakiejkowiek wsępnej wiedzy na ema swojego położenia czy ooczenia mapy poprzez obserwacje erenu przy pomocy sensorów buduje mapę środowiska oraz wyznacza swoje położenie według ej mapy.
4 SLAM ZASADA DZIAŁANIA
5 SLAM FILMY Auonomous Aeria Navigaion in Confined Indoor Environmens hp:// 3D SLAM on muiroor UAV hp:// 6 DoF SLAM using a ToF Camera: The chaenge of a coninuousy growing number of andmarks hp://
6 SLAM - MOŻLIWOŚCI Operacje w nieznanym częściowo ub niedokładnie znanym ub dynamicznie zmieniającym się środowisku Korygowanie dryfu okaizacji oparej o pomiary przyśpieszeń iniowych oraz prędkości obroowych IMU Brak konieczności używania gobanego sysemu okaizacji np. GNSS Możiwość prowadzenia misji w pomieszczeniach, pod ziemią, pod wodą, misje pozaziemskie Fundamen da całkowicie auonomicznych misji Niewrażiwość na przypadkowe czy ceowe zakłócanie ransmisji radiowych Wspomaganie gobanego sysemu okaizacji w ceu poprawy dokładności
7 EKF Eended Kaman Fier Opymany w inowym przypadku, rekursywny esymaor sanu. W prakyce pozwaa połączyć dwa i więcej źródła informacji pomiary w ceu uzyskania jak najdokładniejszej, pożądanej wiekości w danym momencie. Źródła informacji mogą się dubować, uzupełniać bądź być kombinacją obu. Na przykład IMU i GPS pozwaają na uzyskanie prędkości i pozycji. EKF porafi połączyć dane z obu sensorów uzyskując znacznie epsze wyniki niż używając yko jednego źródła.
8 LINOWY MODEL STANOWY Mode dynamiki układu: A B u Mode czujnika: z C
9 LINOWA DYNAMIKA A B u A Macierz B Macierz C Wekor sanu. Opisuje san układu w danym momencie. W prakyce mamy do czynienia z wieoma zmiennymi koniecznymi do opisania sanu układu. przejścia. Opisuje przejście sysemu pomiędzy chwiami - oraz. wejścia. Opisuje wpływ wymuszenia wykonanego w chwii - na san układu w chwii. Macierz wyjścia. Mapuje zmienne sanu na przewidywane wiekości mierzone z.
10 NIEPEWNOŚCI z A C B u N N, R, Q Powyższe warości opisują niepewności w modeu dynamicznym układu oraz pomiarów. W EKF obie wiekością zamodeowane jako biały, nieskoreowany szum o rozkładzie normanym z średnią warością oraz odpowiednimi macierzami kowariancji.
11 PRZYKŁAD IMU-GPS z C u B A y y a a a a v u y v u y.5.5 GPS GPS GPS GPS v u y v u y
12 ROZKŁAD NORMALNY :, ~ e p N p / / : ~ nn n n n n n d e p, Ν p Σ μ Σ μ Σ μ Σ μ D: D:
13 ROZKŁAD NORMALNY, ~, ~ T A A B A N Y B AX Y N X, ~, ~, ~ N X p X p N X N X Zarówno ransformacja inowa, jak i iniowa kombinacja dwóch rozkładów normanych skukuje nowym rozkładem normanym!
14 FILTR KALMANA D
15 ALGORYTM LKF. LKF -, -, u, z :. Predykcja: Korekcja: Zwróć, u A B T R A A T T Q C C C K C z K C K I Przewidywany pomiar Prawdziwy pomiar
16 WSPÓŁCZYNNIK KALMANA Ma za zadanie zminimaizować kowariancje finanego rozkładu. Jeśi mode dynamiki jes dokładny, o: im Σ K = KF wierzy bardziej modeowi dynamiki predykcji. Naomias jeśi czujnik daje dokładne dane, o: im Q K = C T co powoduje, że fir wierzy bardziej pomiarom.
17 WSPÓŁCZYNNIK KALMANA Przykład D: Jaki jes najepszy sposób dwóch pomiarów o rozkładzie normanym? Kombinacja iniowa: = w w σ = w σ + w σ Znajdźmy aką wagę aby wynikowa wariancja σ była jak najmniejsza: dσ dw = w σ + wσ = Rozwiązując da w: σ w = σ + σ
18 CYKL PREDYKCJI - KOREKCJI Predykcja A A A T B u R
19 , T T Q C C C K K C I C z K Korekcja CYKL PREDYKCJI - KOREKCJI
20 Korekcja Predykcja CYKL PREDYKCJI - KOREKCJI T R A A B u A T T Q C C C K K C I C z K
21 NIELINIOWA DYNAMIKA UKŁADU Większość układów charakeryzuje się nieiniową dynamiką oraz modeem pomiarów g u, z h
22 LINOWA TRANSFORMACJA
23 NIELINIOWA TRANSFORMACJA
24 LINEARYZACJA EKF
25 LINEARYZACJA EKF
26 LINEARYZACJA EKF
27 Zinearyzowany mode dynamiki: Zinearyzowany mode czujnika:,,,,, G u g u g u g u g u g H h h h h h LINEARYZACJA EKF Linearyzacja poprzez wykorzysanie ciągu Tayora pierwszego sopnia.
28 ALGORYTM EKF. EKF -, -, u, z :. Predykcja: Korekcja: Zwróć,, u g T R G G T T Q H H H K h z K H K I, u g G h H u A B T R A A T T Q C C C K C z K C K I
29 EKF PODSUMOWANIE Złożoność wykładnicza w iczbie sanów oraz pomiarów: Ok n Wymagany rozmiar pamięci rośnie w empie kwadraowym Nieopymany Duża nieiniowość może powodować rozbieżność esyma Nie nadaje się do zasosowań gdzie są dwie ub więcej hipoez na ema sanu układu W prakyce radzi sobie zaskakująco dobrze w większości zasosowań
30 EKF SLAM




31 RODZAJE MAP Mapy siakowe ub skany Zbiór punków odniesienia
32 DLACZEGO SLAM JEST TRUDNYM PROBLEMEM? SLAM: zarówno pozycja roboa jak i mapa są nieznane Niepewność w pozycji roboa wpływ na nowe pomiary
33 DLACZEGO SLAM JEST TRUDNYM PROBLEMEM? Niepewność w pozycji roboa W prakyce mapowanie, kóre przypisze nowe punky szczegóne do ych w mapie jes nieznane. Złe przypisanie może szybko prowadzić do rozjechania się esyma.
34 Mapa z N punkami szczegónymi. Pozycja roboa reprezenowana przez współrzędne D,y oraz orienacje θ. EKF-SLAM, N N N N N N N N N N N y y y y y y y y y y y N y N
35 EKF-SLAM Mapa Maryca koreacji

36 EKF-SLAM Mapa Maryca koreacji

37 EKF-SLAM Mapa Maryca koreacji

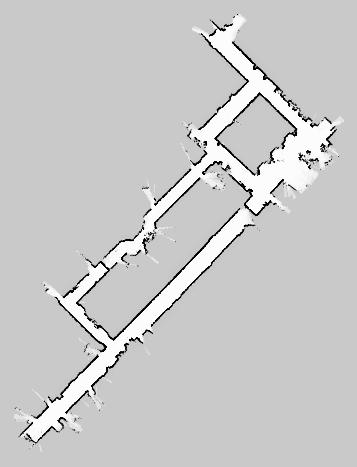
38 EKF SLAM [couresy by John Leonard]
39 EKF SLAM odomeria Trajekoria z EKF
40 EKF-SLAM PODSUMOWANIE Najpopuarniejsze rozwiązanie da SLAM. Złożoność kwadraowa w iczbie sanów: On. Wymagany rozmiar pamięci rośnie w empie kwadraowym. Duże nieiniowości mogą prowadzić do rozbiegnięcia się fira. Tyko jedna hipoeza na ema mapowania pomiaru do mapy musi być użya. Sworzona mapa nie jes użyeczna do omijania przeszkód Obecnie isnieją epsze rozwiązania, np.: FasSLAM, SEIF.
41 LITERATURA EKF Maybeck, Peer S Sochasic modes, esimaion, and conro. Vo.. Mahemaics in Science and Engineering. SLAM Søren Riisgaard oraz Moren Rufus Bas, SLAM for Dummies Hugh Durran-Whye oraz Tim Baiey 6. Simuaneous Locaisaion and Mapping SLAM: Par I oraz II Sebasian Thurn, Wofram Burgard oraz Dieer Fo 4, Probabiisic Roboics. MIT Press opensam.org
42 DZIĘKUJĘ ZA UWAGĘ
Fuzja sygnałów i filtry bayesowskie
 Fuzja sygnałów i filtry bayesowskie Roboty Manipulacyjne i Mobilne dr inż. Janusz Jakubiak Katedra Cybernetyki i Robotyki Wydział Elektroniki, Politechnika Wrocławska Wrocław, 10.03.2015 Dlaczego potrzebna
Fuzja sygnałów i filtry bayesowskie Roboty Manipulacyjne i Mobilne dr inż. Janusz Jakubiak Katedra Cybernetyki i Robotyki Wydział Elektroniki, Politechnika Wrocławska Wrocław, 10.03.2015 Dlaczego potrzebna
Algorytmy estymacji stanu (filtry)
") Algorytmy estymacji stanu (filtry) Na podstawie: AIMA ch15, Udacity (S. Thrun) Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 21 kwietnia 2014 Problem lokalizacji Obserwowalność? Determinizm?
Algorytmy estymacji stanu (filtry) Na podstawie: AIMA ch15, Udacity (S. Thrun) Wojciech Jaśkowski Instytut Informatyki, Politechnika Poznańska 21 kwietnia 2014 Problem lokalizacji Obserwowalność? Determinizm?
Kombinowanie prognoz. - dlaczego należy kombinować prognozy? - obejmowanie prognoz. - podstawowe metody kombinowania prognoz
 Noaki do wykładu 005 Kombinowanie prognoz - dlaczego należy kombinować prognozy? - obejmowanie prognoz - podsawowe meody kombinowania prognoz - przykłady kombinowania prognoz gospodarki polskiej - zalecenia
Noaki do wykładu 005 Kombinowanie prognoz - dlaczego należy kombinować prognozy? - obejmowanie prognoz - podsawowe meody kombinowania prognoz - przykłady kombinowania prognoz gospodarki polskiej - zalecenia
Pobieranie próby. Rozkład χ 2
 Graficzne przedsawianie próby Hisogram Esymaory przykład Próby z rozkładów cząskowych Próby ze skończonej populacji Próby z rozkładu normalnego Rozkład χ Pobieranie próby. Rozkład χ Posać i własności Znaczenie
Graficzne przedsawianie próby Hisogram Esymaory przykład Próby z rozkładów cząskowych Próby ze skończonej populacji Próby z rozkładu normalnego Rozkład χ Pobieranie próby. Rozkład χ Posać i własności Znaczenie
ψ przedstawia zależność
 Ruch falowy 4-4 Ruch falowy Ruch falowy polega na rozchodzeniu się zaburzenia (odkszałcenia) w ośrodku sprężysym Wielkość zaburzenia jes, podobnie jak w przypadku drgań, funkcją czasu () Zaburzenie rozchodzi
Ruch falowy 4-4 Ruch falowy Ruch falowy polega na rozchodzeniu się zaburzenia (odkszałcenia) w ośrodku sprężysym Wielkość zaburzenia jes, podobnie jak w przypadku drgań, funkcją czasu () Zaburzenie rozchodzi
Modele zapisane w przestrzeni stanów
 Modele zapisane w przestrzeni stanów Modele Przestrzeni Stanów (State Space Models) sa to modele, w których część parametrów jest nieobserwowalna i losowa. Zachowanie wielowymiarowej zmiennej y t zależy
Modele zapisane w przestrzeni stanów Modele Przestrzeni Stanów (State Space Models) sa to modele, w których część parametrów jest nieobserwowalna i losowa. Zachowanie wielowymiarowej zmiennej y t zależy
Wykład FIZYKA I. 2. Kinematyka punktu materialnego. Dr hab. inż. Władysław Artur Woźniak
 Wykład FIZYKA I. Kinemayka punku maerialnego Kaedra Opyki i Fooniki Wydział Podsawowych Problemów Techniki Poliechnika Wrocławska hp://www.if.pwr.wroc.pl/~wozniak/fizyka1.hml Miejsce konsulacji: pokój
Wykład FIZYKA I. Kinemayka punku maerialnego Kaedra Opyki i Fooniki Wydział Podsawowych Problemów Techniki Poliechnika Wrocławska hp://www.if.pwr.wroc.pl/~wozniak/fizyka1.hml Miejsce konsulacji: pokój
EKONOMETRIA wykład 2. Prof. dr hab. Eugeniusz Gatnar.
 EKONOMERIA wykład Prof. dr hab. Eugeniusz Ganar eganar@mail.wz.uw.edu.pl Przedziały ufności Dla paramerów srukuralnych modelu: P bˆ j S( bˆ z prawdopodobieńswem parameru b bˆ S( bˆ, ( m j j j, ( m j b
EKONOMERIA wykład Prof. dr hab. Eugeniusz Ganar eganar@mail.wz.uw.edu.pl Przedziały ufności Dla paramerów srukuralnych modelu: P bˆ j S( bˆ z prawdopodobieńswem parameru b bˆ S( bˆ, ( m j j j, ( m j b
Ruch płaski. Bryła w ruchu płaskim. (płaszczyzna kierująca) Punkty bryły o jednakowych prędkościach i przyspieszeniach. Prof.
 Punkty bryły o jednakowych prędkościach i przyspieszeniach. Prof.") Ruch płaski Ruchem płaskim nazywamy ruch, podczas kórego wszyskie punky ciała poruszają się w płaszczyznach równoległych do pewnej nieruchomej płaszczyzny, zwanej płaszczyzną kierującą. Punky bryły o jednakowych
Ruch płaski Ruchem płaskim nazywamy ruch, podczas kórego wszyskie punky ciała poruszają się w płaszczyznach równoległych do pewnej nieruchomej płaszczyzny, zwanej płaszczyzną kierującą. Punky bryły o jednakowych
WAE Jarosław Arabas Ewolucja różnicowa Rój cząstek EDA
 WAE Jarosław Arabas Ewolucja różnicowa Rój cząsek EDA Ewolucja różnicowa algorym differenial evoluion inicjuj P0 {P 01, P02... Pμ0 } H P0 0 while! sop for (i 1 :μ) P j selec (P ) P k, Pl sample (P ) M
WAE Jarosław Arabas Ewolucja różnicowa Rój cząsek EDA Ewolucja różnicowa algorym differenial evoluion inicjuj P0 {P 01, P02... Pμ0 } H P0 0 while! sop for (i 1 :μ) P j selec (P ) P k, Pl sample (P ) M
Prawdopodobieństwo i statystyka
 Wykład XV: Zagadnienia redukcji wymiaru danych 2 lutego 2015 r. Standaryzacja danych Standaryzacja danych Własności macierzy korelacji Definicja Niech X będzie zmienną losową o skończonym drugim momencie.
Wykład XV: Zagadnienia redukcji wymiaru danych 2 lutego 2015 r. Standaryzacja danych Standaryzacja danych Własności macierzy korelacji Definicja Niech X będzie zmienną losową o skończonym drugim momencie.
UTRATA STATECZNOŚCI. O charakterze układu decyduje wielkośćobciążenia. powrót do pierwotnego położenia. stabilnego do stanu niestabilnego.
 Metody obiczeniowe w biomechanice UTRATA STATECZNOŚCI STATECZNOŚĆ odpornośćna małe zaburzenia. Układ stabiny po małym odchyeniu od stanu równowagi powrót do pierwotnego położenia. Układ niestabiny po małym
Metody obiczeniowe w biomechanice UTRATA STATECZNOŚCI STATECZNOŚĆ odpornośćna małe zaburzenia. Układ stabiny po małym odchyeniu od stanu równowagi powrót do pierwotnego położenia. Układ niestabiny po małym
Statystyka i eksploracja danych
 Wykład XII: Zagadnienia redukcji wymiaru danych 12 maja 2014 Definicja Niech X będzie zmienną losową o skończonym drugim momencie. Standaryzacją zmiennej X nazywamy zmienną losową Z = X EX Var (X ). Definicja
Wykład XII: Zagadnienia redukcji wymiaru danych 12 maja 2014 Definicja Niech X będzie zmienną losową o skończonym drugim momencie. Standaryzacją zmiennej X nazywamy zmienną losową Z = X EX Var (X ). Definicja
Spis treści. Przedmowa... XI. Rozdział 1. Pomiar: jednostki miar... 1. Rozdział 2. Pomiar: liczby i obliczenia liczbowe... 16
 Spis treści Przedmowa.......................... XI Rozdział 1. Pomiar: jednostki miar................. 1 1.1. Wielkości fizyczne i pozafizyczne.................. 1 1.2. Spójne układy miar. Układ SI i jego
Spis treści Przedmowa.......................... XI Rozdział 1. Pomiar: jednostki miar................. 1 1.1. Wielkości fizyczne i pozafizyczne.................. 1 1.2. Spójne układy miar. Układ SI i jego
Filtracja pomiarów z głowic laserowych
 dr inż. st. of. Paweł Zalewsi Filtracja pomiarów z głowic laserowych słowa luczowe: filtracja pomiaru odległości, PNDS Założenia filtracji pomiaru odległości. Problem wyznaczenia odległości i parametrów
dr inż. st. of. Paweł Zalewsi Filtracja pomiarów z głowic laserowych słowa luczowe: filtracja pomiaru odległości, PNDS Założenia filtracji pomiaru odległości. Problem wyznaczenia odległości i parametrów
Prawdopodobieństwo i statystyka r.
 Zadanie. Niech (X, Y) ) będzie dwuwymiarową zmienną losową, o wartości oczekiwanej (μ, μ, wariancji każdej ze współrzędnych równej σ oraz kowariancji równej X Y ρσ. Staramy się obserwować niezależne realizacje
Zadanie. Niech (X, Y) ) będzie dwuwymiarową zmienną losową, o wartości oczekiwanej (μ, μ, wariancji każdej ze współrzędnych równej σ oraz kowariancji równej X Y ρσ. Staramy się obserwować niezależne realizacje
ĆWICZENIE 7 WYZNACZANIE LOGARYTMICZNEGO DEKREMENTU TŁUMIENIA ORAZ WSPÓŁCZYNNIKA OPORU OŚRODKA. Wprowadzenie
 ĆWICZENIE 7 WYZNACZIE LOGARYTMICZNEGO DEKREMENTU TŁUMIENIA ORAZ WSPÓŁCZYNNIKA OPORU OŚRODKA Wprowadzenie Ciało drgające w rzeczywisym ośrodku z upływem czasu zmniejsza ampliudę drgań maleje energia mechaniczna
ĆWICZENIE 7 WYZNACZIE LOGARYTMICZNEGO DEKREMENTU TŁUMIENIA ORAZ WSPÓŁCZYNNIKA OPORU OŚRODKA Wprowadzenie Ciało drgające w rzeczywisym ośrodku z upływem czasu zmniejsza ampliudę drgań maleje energia mechaniczna
Zadania ze statystyki, cz.7 - hipotezy statystyczne, błąd standardowy, testowanie hipotez statystycznych
 Zadania ze statystyki, cz.7 - hipotezy statystyczne, błąd standardowy, testowanie hipotez statystycznych Zad. 1 Średnia ocen z semestru letniego w populacji studentów socjologii w roku akademickim 2011/2012
Zadania ze statystyki, cz.7 - hipotezy statystyczne, błąd standardowy, testowanie hipotez statystycznych Zad. 1 Średnia ocen z semestru letniego w populacji studentów socjologii w roku akademickim 2011/2012
WYKŁADY ZE STATYSTYKI MATEMATYCZNEJ wykład 3 - model statystyczny, podstawowe zadania statystyki matematycznej
 WYKŁADY ZE STATYSTYKI MATEMATYCZNEJ wykład 3 - model statystyczny, podstawowe zadania statystyki matematycznej Agata Boratyńska Agata Boratyńska Statystyka matematyczna, wykład 3 1 / 8 ZADANIE z rachunku
WYKŁADY ZE STATYSTYKI MATEMATYCZNEJ wykład 3 - model statystyczny, podstawowe zadania statystyki matematycznej Agata Boratyńska Agata Boratyńska Statystyka matematyczna, wykład 3 1 / 8 ZADANIE z rachunku
CHEMIA KWANTOWA Jacek Korchowiec Wydział Chemii UJ Zakład Chemii Teoretycznej Zespół Chemii Kwantowej Grupa Teorii Reaktywności Chemicznej
 CHEMI KWTOW CHEMI KWTOW Jacek Korchowiec Wydział Chemii UJ Zakład Chemii Teoreycznej Zespół Chemii Kwanowej Grupa Teorii Reakywności Chemicznej LITERTUR R. F. alewajski, Podsawy i meody chemii kwanowej:
CHEMI KWTOW CHEMI KWTOW Jacek Korchowiec Wydział Chemii UJ Zakład Chemii Teoreycznej Zespół Chemii Kwanowej Grupa Teorii Reakywności Chemicznej LITERTUR R. F. alewajski, Podsawy i meody chemii kwanowej:
LABORATORIUM Z FIZYKI
 LABORATORIUM Z FIZYKI LABORATORIUM Z FIZYKI I PRACOWNIA FIZYCZNA C w Gliwicach Gliwice, ul. Konarskiego 22, pokoje 52-54 Regulamin pracowni i organizacja zajęć Sprawozdanie (strona tytułowa, karta pomiarowa)
LABORATORIUM Z FIZYKI LABORATORIUM Z FIZYKI I PRACOWNIA FIZYCZNA C w Gliwicach Gliwice, ul. Konarskiego 22, pokoje 52-54 Regulamin pracowni i organizacja zajęć Sprawozdanie (strona tytułowa, karta pomiarowa)
Hierarchiczna analiza skupień
 Hierarchiczna analiza skupień Cel analizy Analiza skupień ma na celu wykrycie w zbiorze obserwacji klastrów, czyli rozłącznych podzbiorów obserwacji, wewnątrz których obserwacje są sobie w jakimś określonym
Hierarchiczna analiza skupień Cel analizy Analiza skupień ma na celu wykrycie w zbiorze obserwacji klastrów, czyli rozłącznych podzbiorów obserwacji, wewnątrz których obserwacje są sobie w jakimś określonym
Filtr Kalmana. Struktury i Algorytmy Sterowania Wykład 1-2. prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz
 Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki 2013-10-09, Gdańsk Założenia
Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki 2013-10-09, Gdańsk Założenia
Rozkłady wielu zmiennych
 Rozkłady wielu zmiennych Uogólnienie pojęć na rozkład wielu zmiennych Dystrybuanta, gęstość prawdopodobieństwa, rozkład brzegowy, wartości średnie i odchylenia standardowe, momenty Notacja macierzowa Macierz
Rozkłady wielu zmiennych Uogólnienie pojęć na rozkład wielu zmiennych Dystrybuanta, gęstość prawdopodobieństwa, rozkład brzegowy, wartości średnie i odchylenia standardowe, momenty Notacja macierzowa Macierz
Zastosowanie deflektometrii do pomiarów kształtu 3D. Katarzyna Goplańska
 Zastosowanie deflektometrii do pomiarów kształtu 3D Plan prezentacji Metody pomiaru kształtu Deflektometria Zasada działania Stereo-deflektometria Kalibracja Zalety Zastosowania Przykład Podsumowanie Metody
Zastosowanie deflektometrii do pomiarów kształtu 3D Plan prezentacji Metody pomiaru kształtu Deflektometria Zasada działania Stereo-deflektometria Kalibracja Zalety Zastosowania Przykład Podsumowanie Metody
KORELACJE I REGRESJA LINIOWA
 KORELACJE I REGRESJA LINIOWA Korelacje i regresja liniowa Analiza korelacji: Badanie, czy pomiędzy dwoma zmiennymi istnieje zależność Obie analizy się wzajemnie przeplatają Analiza regresji: Opisanie modelem
KORELACJE I REGRESJA LINIOWA Korelacje i regresja liniowa Analiza korelacji: Badanie, czy pomiędzy dwoma zmiennymi istnieje zależność Obie analizy się wzajemnie przeplatają Analiza regresji: Opisanie modelem
INFORMATYKA W CHEMII Dr Piotr Szczepański
 INFORMATYKA W CHEMII Dr Piotr Szczepański Katedra Chemii Fizycznej i Fizykochemii Polimerów WPROWADZENIE DO STATYSTYCZNEJ OCENY WYNIKÓW DOŚWIADCZEŃ 1. BŁĄD I STATYSTYKA błąd systematyczny, błąd przypadkowy,
INFORMATYKA W CHEMII Dr Piotr Szczepański Katedra Chemii Fizycznej i Fizykochemii Polimerów WPROWADZENIE DO STATYSTYCZNEJ OCENY WYNIKÓW DOŚWIADCZEŃ 1. BŁĄD I STATYSTYKA błąd systematyczny, błąd przypadkowy,
2. Wprowadzenie. Obiekt
 POLITECHNIKA WARSZAWSKA Insyu Elekroenergeyki, Zakład Elekrowni i Gospodarki Elekroenergeycznej Bezpieczeńswo elekroenergeyczne i niezawodność zasilania laoraorium opracował: prof. dr ha. inż. Józef Paska,
POLITECHNIKA WARSZAWSKA Insyu Elekroenergeyki, Zakład Elekrowni i Gospodarki Elekroenergeycznej Bezpieczeńswo elekroenergeyczne i niezawodność zasilania laoraorium opracował: prof. dr ha. inż. Józef Paska,
Estymacja przedziałowa - przedziały ufności dla średnich. Wrocław, 5 grudnia 2014
 Estymacja przedziałowa - przedziały ufności dla średnich Wrocław, 5 grudnia 2014 Przedział ufności Niech będzie dana próba X 1, X 2,..., X n z rozkładu P θ, θ Θ. Definicja Przedziałem ufności dla paramertu
Estymacja przedziałowa - przedziały ufności dla średnich Wrocław, 5 grudnia 2014 Przedział ufności Niech będzie dana próba X 1, X 2,..., X n z rozkładu P θ, θ Θ. Definicja Przedziałem ufności dla paramertu
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
y 1 y 2 = f 2 (t, y 1, y 2,..., y n )... y n = f n (t, y 1, y 2,..., y n ) f 1 (t, y 1, y 2,..., y n ) y = f(t, y),, f(t, y) =
... y n = f n (t, y 1, y 2,..., y n ) f 1 (t, y 1, y 2,..., y n ) y = f(t, y),, f(t, y) =") Uk lady równań różniczkowych Pojȩcia wsȩpne Uk ladem równań różniczkowych nazywamy uk lad posaci y = f (, y, y 2,, y n ) y 2 = f 2 (, y, y 2,, y n ) y n = f n (, y, y 2,, y n ) () funkcje f j, j =, 2,,
Uk lady równań różniczkowych Pojȩcia wsȩpne Uk ladem równań różniczkowych nazywamy uk lad posaci y = f (, y, y 2,, y n ) y 2 = f 2 (, y, y 2,, y n ) y n = f n (, y, y 2,, y n ) () funkcje f j, j =, 2,,
Doświadczalne wyznaczanie współczynnika sztywności (sprężystości) sprężyn i współczynnika sztywności zastępczej
 sprężyn i współczynnika sztywności zastępczej") Doświadczalne wyznaczanie (sprężystości) sprężyn i zastępczej Statyczna metoda wyznaczania. Wprowadzenie Wartość użytej można wyznaczyć z dużą dokładnością metodą statyczną. W tym celu należy zawiesić
Doświadczalne wyznaczanie (sprężystości) sprężyn i zastępczej Statyczna metoda wyznaczania. Wprowadzenie Wartość użytej można wyznaczyć z dużą dokładnością metodą statyczną. W tym celu należy zawiesić
Na A (n) rozważamy rozkład P (n) , który na zbiorach postaci A 1... A n określa się jako P (n) (X n, A (n), P (n)
 rozważamy rozkład P (n) , który na zbiorach postaci A 1... A n określa się jako P (n) (X n, A (n), P (n)") MODELE STATYSTYCZNE Punktem wyjścia w rozumowaniu statystycznym jest zmienna losowa (cecha) X i jej obserwacje opisujące wyniki doświadczeń bądź pomiarów. Zbiór wartości zmiennej losowej X (zbiór wartości
MODELE STATYSTYCZNE Punktem wyjścia w rozumowaniu statystycznym jest zmienna losowa (cecha) X i jej obserwacje opisujące wyniki doświadczeń bądź pomiarów. Zbiór wartości zmiennej losowej X (zbiór wartości
Politechnika Częstochowska Wydział Inżynierii Mechanicznej i Informatyki. Sprawozdanie #2 z przedmiotu: Prognozowanie w systemach multimedialnych
 Poliechnika Częsochowska Wydział Inżynierii Mechanicznej i Informayki Sprawozdanie #2 z przedmiou: Prognozowanie w sysemach mulimedialnych Andrzej Siwczyński Andrzej Rezler Informayka Rok V, Grupa IO II
Poliechnika Częsochowska Wydział Inżynierii Mechanicznej i Informayki Sprawozdanie #2 z przedmiou: Prognozowanie w sysemach mulimedialnych Andrzej Siwczyński Andrzej Rezler Informayka Rok V, Grupa IO II
Regulator liniowo kwadratowy na przykładzie wahadła odwróconego
 Regulator liniowo kwadratowy na przykładzie wahadła odwróconego kwiecień 2012 Sterowanie Teoria Przykład wahadła na wózku Dany jest system dynamiczny postaci: ẋ = f (x, u) (1) y = h(x) (2) Naszym zadaniem
Regulator liniowo kwadratowy na przykładzie wahadła odwróconego kwiecień 2012 Sterowanie Teoria Przykład wahadła na wózku Dany jest system dynamiczny postaci: ẋ = f (x, u) (1) y = h(x) (2) Naszym zadaniem
Ćwiczenie 1 Metody pomiarowe i opracowywanie danych doświadczalnych.
 Ćwiczenie 1 Metody pomiarowe i opracowywanie danych doświadczalnych. Ćwiczenie ma następujące części: 1 Pomiar rezystancji i sprawdzanie prawa Ohma, metoda najmniejszych kwadratów. 2 Pomiar średnicy pręta.
Ćwiczenie 1 Metody pomiarowe i opracowywanie danych doświadczalnych. Ćwiczenie ma następujące części: 1 Pomiar rezystancji i sprawdzanie prawa Ohma, metoda najmniejszych kwadratów. 2 Pomiar średnicy pręta.
Statycznie niewyznaczalne układy gruntu zbrojonego
 Saycznie niewyznaczane układy grunu zbrojonego Dr inż Aexander D Sokoov CNIIS NIC Mosy, Moskwa Grun zbrojony znajdujący coraz większe zasosowanie w budownicwie drogowym i koejowym jes reaizowany w różnych
Saycznie niewyznaczane układy grunu zbrojonego Dr inż Aexander D Sokoov CNIIS NIC Mosy, Moskwa Grun zbrojony znajdujący coraz większe zasosowanie w budownicwie drogowym i koejowym jes reaizowany w różnych
WYKŁAD 8 ANALIZA REGRESJI
 WYKŁAD 8 ANALIZA REGRESJI Regresja 1. Metoda najmniejszych kwadratów-regresja prostoliniowa 2. Regresja krzywoliniowa 3. Estymacja liniowej funkcji regresji 4. Testy istotności współczynnika regresji liniowej
WYKŁAD 8 ANALIZA REGRESJI Regresja 1. Metoda najmniejszych kwadratów-regresja prostoliniowa 2. Regresja krzywoliniowa 3. Estymacja liniowej funkcji regresji 4. Testy istotności współczynnika regresji liniowej
Elementy statystyki wielowymiarowej
 Wnioskowanie_Statystyczne_-_wykład Spis treści 1 Elementy statystyki wielowymiarowej 1.1 Kowariancja i współczynnik korelacji 1.2 Macierz kowariancji 1.3 Dwumianowy rozkład normalny 1.4 Analiza składowych
Wnioskowanie_Statystyczne_-_wykład Spis treści 1 Elementy statystyki wielowymiarowej 1.1 Kowariancja i współczynnik korelacji 1.2 Macierz kowariancji 1.3 Dwumianowy rozkład normalny 1.4 Analiza składowych
Modelowanie i obliczenia techniczne. Równania różniczkowe Numeryczne rozwiązywanie równań różniczkowych zwyczajnych
 Moelowanie i obliczenia echniczne Równania różniczowe Numeryczne rozwiązywanie równań różniczowych zwyczajnych Przyła ułau ynamicznego E Uła ynamiczny R 0 Zachozi porzeba wyznaczenia: C u C () i() ur ir
Moelowanie i obliczenia echniczne Równania różniczowe Numeryczne rozwiązywanie równań różniczowych zwyczajnych Przyła ułau ynamicznego E Uła ynamiczny R 0 Zachozi porzeba wyznaczenia: C u C () i() ur ir
Wykład 10 Estymacja przedziałowa - przedziały ufności dla średn
 Wykład 10 Estymacja przedziałowa - przedziały ufności dla średniej Wrocław, 21 grudnia 2016r Przedział ufności Niech będzie dana próba X 1, X 2,..., X n z rozkładu P θ, θ Θ. Definicja 10.1 Przedziałem
Wykład 10 Estymacja przedziałowa - przedziały ufności dla średniej Wrocław, 21 grudnia 2016r Przedział ufności Niech będzie dana próba X 1, X 2,..., X n z rozkładu P θ, θ Θ. Definicja 10.1 Przedziałem
WSKAZÓWKI DO WYKONANIA SPRAWOZDANIA Z WYRÓWNAWCZYCH ZAJĘĆ LABORATORYJNYCH
 WSKAZÓWKI DO WYKONANIA SPRAWOZDANIA Z WYRÓWNAWCZYCH ZAJĘĆ LABORATORYJNYCH Dobrze przygotowane sprawozdanie powinno zawierać następujące elementy: 1. Krótki wstęp - maksymalnie pół strony. W krótki i zwięzły
WSKAZÓWKI DO WYKONANIA SPRAWOZDANIA Z WYRÓWNAWCZYCH ZAJĘĆ LABORATORYJNYCH Dobrze przygotowane sprawozdanie powinno zawierać następujące elementy: 1. Krótki wstęp - maksymalnie pół strony. W krótki i zwięzły
PROGNOZOWANIE I SYMULACJE. mgr Żaneta Pruska. Ćwiczenia 2 Zadanie 1
 PROGNOZOWANIE I SYMULACJE mgr Żanea Pruska Ćwiczenia 2 Zadanie 1 Firma Alfa jes jednym z głównych dosawców firmy Bea. Ilość produku X, wyrażona w ysiącach wyprodukowanych i dosarczonych szuk firmie Bea,
PROGNOZOWANIE I SYMULACJE mgr Żanea Pruska Ćwiczenia 2 Zadanie 1 Firma Alfa jes jednym z głównych dosawców firmy Bea. Ilość produku X, wyrażona w ysiącach wyprodukowanych i dosarczonych szuk firmie Bea,
Zad. 4 Należy określić rodzaj testu (jedno czy dwustronny) oraz wartości krytyczne z lub t dla określonych hipotez i ich poziomów istotności:
 oraz wartości krytyczne z lub t dla określonych hipotez i ich poziomów istotności:") Zadania ze statystyki cz. 7. Zad.1 Z populacji wyłoniono próbę wielkości 64 jednostek. Średnia arytmetyczna wartość cechy wyniosła 110, zaś odchylenie standardowe 16. Należy wyznaczyć przedział ufności
Zadania ze statystyki cz. 7. Zad.1 Z populacji wyłoniono próbę wielkości 64 jednostek. Średnia arytmetyczna wartość cechy wyniosła 110, zaś odchylenie standardowe 16. Należy wyznaczyć przedział ufności
GPSz2 WYKŁAD 9 10 STANDARDY TECHNICZNE DOTYCZĄCE OSNÓW POMIAROWYCH ORAZ POMIARÓW SYTUACYJNO-WYSOKOŚCIOWYCH I ICH INTERPRETACJA
 GPSz2 WYKŁAD 9 10 STANDARDY TECHNICZNE DOTYCZĄCE OSNÓW POMIAROWYCH ORAZ POMIARÓW SYTUACYJNO-WYSOKOŚCIOWYCH I ICH INTERPRETACJA 1 STANDARDY DOTYCZACE POMIARÓW SYT. WYS. (W TYM OSNÓW POMIAROWYCH: SYTUACYJNYCH
GPSz2 WYKŁAD 9 10 STANDARDY TECHNICZNE DOTYCZĄCE OSNÓW POMIAROWYCH ORAZ POMIARÓW SYTUACYJNO-WYSOKOŚCIOWYCH I ICH INTERPRETACJA 1 STANDARDY DOTYCZACE POMIARÓW SYT. WYS. (W TYM OSNÓW POMIAROWYCH: SYTUACYJNYCH
DYNAMIKA KONSTRUKCJI
 10. DYNAMIKA KONSTRUKCJI 1 10. 10. DYNAMIKA KONSTRUKCJI 10.1. Wprowadzenie Ogólne równanie dynamiki zapisujemy w posaci: M d C d Kd =P (10.1) Zapis powyższy oznacza, że równanie musi być spełnione w każdej
10. DYNAMIKA KONSTRUKCJI 1 10. 10. DYNAMIKA KONSTRUKCJI 10.1. Wprowadzenie Ogólne równanie dynamiki zapisujemy w posaci: M d C d Kd =P (10.1) Zapis powyższy oznacza, że równanie musi być spełnione w każdej
licencjat Pytania teoretyczne:
 Plan wykładu: 1. Wiadomości ogólne. 2. Model ekonomeryczny i jego elemeny 3. Meody doboru zmiennych do modelu ekonomerycznego. 4. Szacownie paramerów srukuralnych MNK. Weryfikacja modelu KMNK 6. Prognozowanie
Plan wykładu: 1. Wiadomości ogólne. 2. Model ekonomeryczny i jego elemeny 3. Meody doboru zmiennych do modelu ekonomerycznego. 4. Szacownie paramerów srukuralnych MNK. Weryfikacja modelu KMNK 6. Prognozowanie
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Prawdopodobieństwo i statystyka r.
 Prawdopodobieństwo i statystyka 9.06.999 r. Zadanie. Rzucamy pięcioma kośćmi do gry. Następnie rzucamy ponownie tymi kośćmi, na których nie wypadły szóstki. W trzeciej rundzie rzucamy tymi kośćmi, na których
Prawdopodobieństwo i statystyka 9.06.999 r. Zadanie. Rzucamy pięcioma kośćmi do gry. Następnie rzucamy ponownie tymi kośćmi, na których nie wypadły szóstki. W trzeciej rundzie rzucamy tymi kośćmi, na których
Stanisław Cichocki Natalia Nehrebecka. Wykład 3
 Sanisław Cichocki Naalia Nehrebecka Wykład 3 1 1. Zmienne sacjonarne 2. Zmienne zinegrowane 3. Regresja pozorna 4. Funkcje ACF i PACF 5. Badanie sacjonarności Tes Dickey-Fullera (DF) 2 1. Zmienne sacjonarne
Sanisław Cichocki Naalia Nehrebecka Wykład 3 1 1. Zmienne sacjonarne 2. Zmienne zinegrowane 3. Regresja pozorna 4. Funkcje ACF i PACF 5. Badanie sacjonarności Tes Dickey-Fullera (DF) 2 1. Zmienne sacjonarne
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 2 autorzy: A. Gonczarek, J.M. Tomczak Metody estymacji ML Zad. 1 Pojawianie się spamu opisane jest zmienną losową x o rozkładzie dwupunktowym
Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 2 autorzy: A. Gonczarek, J.M. Tomczak Metody estymacji ML Zad. 1 Pojawianie się spamu opisane jest zmienną losową x o rozkładzie dwupunktowym
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
PRZEDMIOTOWY SYSTEM OCENIANIA Z FIZYKI WYMAGANIA EDUKACYJNE DLA UCZNIÓW KLAS I
 PRZEDMIOTOWY SYSTEM OCENIANIA Z FIZYKI WYMAGANIA EDUKACYJNE DLA UCZNIÓW KLAS I Wymagania konieczne ocena dopuszczająca wie że długość i odległość mierzymy w milimerach cenymerach merach lub kilomerach
PRZEDMIOTOWY SYSTEM OCENIANIA Z FIZYKI WYMAGANIA EDUKACYJNE DLA UCZNIÓW KLAS I Wymagania konieczne ocena dopuszczająca wie że długość i odległość mierzymy w milimerach cenymerach merach lub kilomerach
Statystyka. Wykład 2. Krzysztof Topolski. Wrocław, 11 października 2012
 Wykład 2 Wrocław, 11 października 2012 Próba losowa Definicja. Zmienne losowe X 1, X 2,..., X n nazywamy próba losową rozmiaru n z rozkładu o gęstości f (x) (o dystrybuancie F (x)) jeśli X 1, X 2,...,
Wykład 2 Wrocław, 11 października 2012 Próba losowa Definicja. Zmienne losowe X 1, X 2,..., X n nazywamy próba losową rozmiaru n z rozkładu o gęstości f (x) (o dystrybuancie F (x)) jeśli X 1, X 2,...,
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej
 Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
SYMULACYJNA ANALIZA PRODUKCJI ENERGII ELEKTRYCZNEJ I CIEPŁA Z ODNAWIALNYCH NOŚNIKÓW W POLSCE
 SYMULACYJNA ANALIZA PRODUKCJI ENERGII ELEKTRYCZNEJ I CIEPŁA Z ODNAWIALNYCH NOŚNIKÓW W POLSCE Janusz Sowiński, Rober Tomaszewski, Arur Wacharczyk Insyu Elekroenergeyki Poliechnika Częsochowska Aky prawne
SYMULACYJNA ANALIZA PRODUKCJI ENERGII ELEKTRYCZNEJ I CIEPŁA Z ODNAWIALNYCH NOŚNIKÓW W POLSCE Janusz Sowiński, Rober Tomaszewski, Arur Wacharczyk Insyu Elekroenergeyki Poliechnika Częsochowska Aky prawne
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Badanie funktorów logicznych TTL - ćwiczenie 1
 adanie funkorów logicznych TTL - ćwiczenie 1 1. Cel ćwiczenia Zapoznanie się z podsawowymi srukurami funkorów logicznych realizowanych w echnice TTL (Transisor Transisor Logic), ich podsawowymi paramerami
adanie funkorów logicznych TTL - ćwiczenie 1 1. Cel ćwiczenia Zapoznanie się z podsawowymi srukurami funkorów logicznych realizowanych w echnice TTL (Transisor Transisor Logic), ich podsawowymi paramerami
1 Podstawy rachunku prawdopodobieństwa
 1 Podstawy rachunku prawdopodobieństwa Dystrybuantą zmiennej losowej X nazywamy prawdopodobieństwo przyjęcia przez zmienną losową X wartości mniejszej od x, tzn. F (x) = P [X < x]. 1. dla zmiennej losowej
1 Podstawy rachunku prawdopodobieństwa Dystrybuantą zmiennej losowej X nazywamy prawdopodobieństwo przyjęcia przez zmienną losową X wartości mniejszej od x, tzn. F (x) = P [X < x]. 1. dla zmiennej losowej
Definicja i funkcje Systemów Informacji Geograficznej
 Definicja i funkcje Systemów Informacji Geograficznej Mateusz Malinowski Anna Krakowiak-Bal Kraków 17 marca 2014 r. Systemy Informacji Geograficznej są traktowane jako zautomatyzowana sieć funkcji, czyli
Definicja i funkcje Systemów Informacji Geograficznej Mateusz Malinowski Anna Krakowiak-Bal Kraków 17 marca 2014 r. Systemy Informacji Geograficznej są traktowane jako zautomatyzowana sieć funkcji, czyli
R n = {(x 1, x 2,..., x n ): x i R, i {1,2,...,n} },
: x i R, i {1,2,...,n} },") nazywa- Definicja 1. Przestrzenią liniową R n my zbiór wektorów R n = {(x 1, x 2,..., x n ): x i R, i {1,2,...,n} }, z określonymi działaniami dodawania wektorów i mnożenia wektorów przez liczby rzeczywiste.
nazywa- Definicja 1. Przestrzenią liniową R n my zbiór wektorów R n = {(x 1, x 2,..., x n ): x i R, i {1,2,...,n} }, z określonymi działaniami dodawania wektorów i mnożenia wektorów przez liczby rzeczywiste.
Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych
 inż. Marek Duczkowski Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych słowa kluczowe: algorytm gradientowy, optymalizacja, określanie wodnicy W artykule
inż. Marek Duczkowski Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych słowa kluczowe: algorytm gradientowy, optymalizacja, określanie wodnicy W artykule
Podstawy opracowania wyników pomiarów z elementami analizy niepewności statystycznych
 Podstawy opracowania wyników pomiarów z elementami analizy niepewności statystycznych Dr inż. Marcin Zieliński I Pracownia Fizyczna dla Biotechnologii, wtorek 8:00-10:45 Konsultacje Zakład Fizyki Jądrowej
Podstawy opracowania wyników pomiarów z elementami analizy niepewności statystycznych Dr inż. Marcin Zieliński I Pracownia Fizyczna dla Biotechnologii, wtorek 8:00-10:45 Konsultacje Zakład Fizyki Jądrowej
FIZYKA LABORATORIUM prawo Ohma
 FIZYKA LABORATORIUM prawo Ohma dr hab. inż. Michał K. Urbański, Wydział Fizyki Politechniki Warszawskiej, pok 18 Gmach Fizyki, murba@if.pw.edu.pl www.if.pw.edu.pl/ murba strona Wydziału Fizyki www.fizyka.pw.edu.pl
FIZYKA LABORATORIUM prawo Ohma dr hab. inż. Michał K. Urbański, Wydział Fizyki Politechniki Warszawskiej, pok 18 Gmach Fizyki, murba@if.pw.edu.pl www.if.pw.edu.pl/ murba strona Wydziału Fizyki www.fizyka.pw.edu.pl
PODSTAWY CHEMII KWANTOWEJ. Jacek Korchowiec Wydział Chemii UJ Zakład Chemii Teoretycznej Zespół Chemii Kwantowej Grupa Teorii Reaktywności Chemicznej
 PODSTWY CHEMII KWTOWEJ Jacek Korchowiec Wydział Chemii UJ Zakład Chemii Teoreycznej Zespół Chemii Kwanowej Grupa Teorii Reakywności Chemicznej LITERTUR R. F. alewajski, Podsawy i meody chemii kwanowej:
PODSTWY CHEMII KWTOWEJ Jacek Korchowiec Wydział Chemii UJ Zakład Chemii Teoreycznej Zespół Chemii Kwanowej Grupa Teorii Reakywności Chemicznej LITERTUR R. F. alewajski, Podsawy i meody chemii kwanowej:
KURS EKONOMETRIA. Lekcja 1 Wprowadzenie do modelowania ekonometrycznego ZADANIE DOMOWE. Strona 1
 KURS EKONOMETRIA Lekcja 1 Wprowadzenie do modelowania ekonomerycznego ZADANIE DOMOWE www.erapez.pl Srona 1 Część 1: TEST Zaznacz poprawną odpowiedź (ylko jedna jes prawdziwa). Pyanie 1 Kóre z poniższych
KURS EKONOMETRIA Lekcja 1 Wprowadzenie do modelowania ekonomerycznego ZADANIE DOMOWE www.erapez.pl Srona 1 Część 1: TEST Zaznacz poprawną odpowiedź (ylko jedna jes prawdziwa). Pyanie 1 Kóre z poniższych
Stanisław Cichocki Natalia Nehrebecka. Wykład 3
 Sanisław Cichocki Naalia Nehrebecka Wykład 3 1 1. Regresja pozorna 2. Funkcje ACF i PACF 3. Badanie sacjonarności Tes Dickey-Fullera (DF) Rozszerzony es Dickey-Fullera (ADF) 2 1. Regresja pozorna 2. Funkcje
Sanisław Cichocki Naalia Nehrebecka Wykład 3 1 1. Regresja pozorna 2. Funkcje ACF i PACF 3. Badanie sacjonarności Tes Dickey-Fullera (DF) Rozszerzony es Dickey-Fullera (ADF) 2 1. Regresja pozorna 2. Funkcje
Mechanika Robotów. Wojciech Lisowski. 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej
 Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
Ważne rozkłady i twierdzenia c.d.
 Ważne rozkłady i twierdzenia c.d. Funkcja charakterystyczna rozkładu Wielowymiarowy rozkład normalny Elipsa kowariacji Sploty rozkładów Rozkłady jednostajne Sploty z rozkładem normalnym Pobieranie próby
Ważne rozkłady i twierdzenia c.d. Funkcja charakterystyczna rozkładu Wielowymiarowy rozkład normalny Elipsa kowariacji Sploty rozkładów Rozkłady jednostajne Sploty z rozkładem normalnym Pobieranie próby
METODY ESTYMACJI PUNKTOWEJ. nieznanym parametrem (lub wektorem parametrów). Przez X będziemy też oznaczać zmienną losową o rozkładzie
. Przez X będziemy też oznaczać zmienną losową o rozkładzie") METODY ESTYMACJI PUNKTOWEJ X 1,..., X n - próbka z rozkładu P θ, θ Θ, θ jest nieznanym parametrem (lub wektorem parametrów). Przez X będziemy też oznaczać zmienną losową o rozkładzie P θ. Definicja. Estymatorem
METODY ESTYMACJI PUNKTOWEJ X 1,..., X n - próbka z rozkładu P θ, θ Θ, θ jest nieznanym parametrem (lub wektorem parametrów). Przez X będziemy też oznaczać zmienną losową o rozkładzie P θ. Definicja. Estymatorem
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 3 Metody estymacji. Estymator największej wiarygodności Zad. 1 Pojawianie się spamu opisane jest zmienną losową y o rozkładzie zero-jedynkowym
Metody systemowe i decyzyjne w informatyce Ćwiczenia lista zadań nr 3 Metody estymacji. Estymator największej wiarygodności Zad. 1 Pojawianie się spamu opisane jest zmienną losową y o rozkładzie zero-jedynkowym
Regresja wielokrotna jest metodą statystyczną, w której oceniamy wpływ wielu zmiennych niezależnych (X1, X2, X3,...) na zmienną zależną (Y).
 na zmienną zależną (Y).") Statystyka i opracowanie danych Ćwiczenia 12 Izabela Olejarczyk - Wożeńska AGH, WIMiIP, KISIM REGRESJA WIELORAKA Regresja wielokrotna jest metodą statystyczną, w której oceniamy wpływ wielu zmiennych niezależnych
Statystyka i opracowanie danych Ćwiczenia 12 Izabela Olejarczyk - Wożeńska AGH, WIMiIP, KISIM REGRESJA WIELORAKA Regresja wielokrotna jest metodą statystyczną, w której oceniamy wpływ wielu zmiennych niezależnych
Komputerowa analiza danych doświadczalnych
 Komputerowa analiza danych doświadczalnych Wykład 3 11.03.2016 dr inż. Łukasz Graczykowski lgraczyk@if.pw.edu.pl Wykłady z poprzednich lat (dr inż. H. Zbroszczyk): http://www.if.pw.edu.pl/~gos/student
Komputerowa analiza danych doświadczalnych Wykład 3 11.03.2016 dr inż. Łukasz Graczykowski lgraczyk@if.pw.edu.pl Wykłady z poprzednich lat (dr inż. H. Zbroszczyk): http://www.if.pw.edu.pl/~gos/student
STATYSTYKA MATEMATYCZNA WYKŁAD grudnia 2009
 STATYSTYKA MATEMATYCZNA WYKŁAD 10 14 grudnia 2009 PARAMETRY POŁOŻENIA Przypomnienie: Model statystyczny pomiaru: wynik pomiaru X = µ + ε 1. ε jest zmienną losową 2. E(ε) = 0 pomiar nieobciążony, pomiar
STATYSTYKA MATEMATYCZNA WYKŁAD 10 14 grudnia 2009 PARAMETRY POŁOŻENIA Przypomnienie: Model statystyczny pomiaru: wynik pomiaru X = µ + ε 1. ε jest zmienną losową 2. E(ε) = 0 pomiar nieobciążony, pomiar
Procesy stochastyczne
 Wykład I: Istnienie procesów stochastycznych 2 marca 2015 Forma zaliczenia przedmiotu Forma zaliczenia Literatura 1 Zaliczenie ćwiczeń rachunkowych. 2 Egzamin ustny z teorii 3 Do wykładu przygotowane są
Wykład I: Istnienie procesów stochastycznych 2 marca 2015 Forma zaliczenia przedmiotu Forma zaliczenia Literatura 1 Zaliczenie ćwiczeń rachunkowych. 2 Egzamin ustny z teorii 3 Do wykładu przygotowane są
Filtr Kalmana. Zaawansowane Techniki Sterowania. Wydział Mechatroniki Politechniki Warszawskiej. Anna Sztyber
 Filtr Kalmana Zaawansowane Techniki Sterowania Wydział Mechatroniki Politechniki Warszawskiej Anna Sztyber ZTS (IAiR PW) Filtr Kalmana Anna Sztyber 1 / 32 Plan wykładu 1 Sformułowanie problemu 2 Niestacjonarny
Filtr Kalmana Zaawansowane Techniki Sterowania Wydział Mechatroniki Politechniki Warszawskiej Anna Sztyber ZTS (IAiR PW) Filtr Kalmana Anna Sztyber 1 / 32 Plan wykładu 1 Sformułowanie problemu 2 Niestacjonarny
Rozpoznawanie obrazów
 Rozpoznawanie obrazów Ćwiczenia lista zadań nr 7 autorzy: A. Gonczarek, J.M. Tomczak Przykładowe problemy Klasyfikacja binarna Dla obrazu x zaproponowano dwie cechy φ(x) = (φ 1 (x) φ 2 (x)) T. Na obrazie
Rozpoznawanie obrazów Ćwiczenia lista zadań nr 7 autorzy: A. Gonczarek, J.M. Tomczak Przykładowe problemy Klasyfikacja binarna Dla obrazu x zaproponowano dwie cechy φ(x) = (φ 1 (x) φ 2 (x)) T. Na obrazie
Dyskretny proces Markowa
 Procesy sochasyczne WYKŁAD 4 Dyskreny roces Markowa Rozarujemy roces sochasyczny X, w kórym aramer jes ciągły zwykle. Będziemy zakładać, że zbiór sanów jes co najwyżej rzeliczalny. Proces X, jes rocesem
Procesy sochasyczne WYKŁAD 4 Dyskreny roces Markowa Rozarujemy roces sochasyczny X, w kórym aramer jes ciągły zwykle. Będziemy zakładać, że zbiór sanów jes co najwyżej rzeliczalny. Proces X, jes rocesem
WNIOSKOWANIE STATYSTYCZNE
 Wnioskowanie saysyczne w ekonomerycznej analizie procesu produkcyjnego / WNIOSKOWANIE STATYSTYCZNE W EKONOMETRYCZNEJ ANAIZIE PROCESU PRODUKCYJNEGO Maeriał pomocniczy: proszę przejrzeć srony www.cyf-kr.edu.pl/~eomazur/zadl4.hml
Wnioskowanie saysyczne w ekonomerycznej analizie procesu produkcyjnego / WNIOSKOWANIE STATYSTYCZNE W EKONOMETRYCZNEJ ANAIZIE PROCESU PRODUKCYJNEGO Maeriał pomocniczy: proszę przejrzeć srony www.cyf-kr.edu.pl/~eomazur/zadl4.hml
Metoda momentów i kwantyli próbkowych. Wrocław, 7 listopada 2014
 Metoda momentów i kwantyli próbkowych Wrocław, 7 listopada 2014 Metoda momentów Momenty zmiennych losowych X 1, X 2,..., X n - próba losowa. Momenty zmiennych losowych X 1, X 2,..., X n - próba losowa.
Metoda momentów i kwantyli próbkowych Wrocław, 7 listopada 2014 Metoda momentów Momenty zmiennych losowych X 1, X 2,..., X n - próba losowa. Momenty zmiennych losowych X 1, X 2,..., X n - próba losowa.
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO...
 Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Nazwisko i imię: Zespół: Data: Ćwiczenie nr 1: Wahadło fizyczne. opis ruchu drgającego a w szczególności drgań wahadła fizycznego
 Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Wykład 6. Badanie dynamiki zjawisk
 Wykład 6 Badanie dynamiki zjawisk Krzywa wieża w Pizie 1 2 3 4 5 6 7 8 9 10 11 12 13 y 4,9642 4,9644 4,9656 4,9667 4,9673 4,9688 4,9696 4,9698 4,9713 4,9717 4,9725 4,9742 4,9757 Szeregiem czasowym nazywamy
Wykład 6 Badanie dynamiki zjawisk Krzywa wieża w Pizie 1 2 3 4 5 6 7 8 9 10 11 12 13 y 4,9642 4,9644 4,9656 4,9667 4,9673 4,9688 4,9696 4,9698 4,9713 4,9717 4,9725 4,9742 4,9757 Szeregiem czasowym nazywamy
Zaawansowane metody numeryczne
 Wykład 7 a szeregi Fouriera (zarówno w przypadku ciągłym, jak i dyskretnym) jest szczegónym przypadkiem aproksymacji funkcjami ortogonanymi. Anaitycznie rozwiązanie zadania aproksymacji trygonometrycznej
Wykład 7 a szeregi Fouriera (zarówno w przypadku ciągłym, jak i dyskretnym) jest szczegónym przypadkiem aproksymacji funkcjami ortogonanymi. Anaitycznie rozwiązanie zadania aproksymacji trygonometrycznej
Politechnika Gdańska Wydział Elektrotechniki i Automatyki. Automatyka i Robotyka Systemy Sterowania i Wspomagania Decyzji
 Monitorowanie i Diagnostyka w Systemach Sterowania (MiDwSS) Podstawowe sposoby opisu niepewności, wybrane zagadnienia zastosowania estymacji rekursywnej dla potrzeb monitorowania i diagnostyki w systemach
Monitorowanie i Diagnostyka w Systemach Sterowania (MiDwSS) Podstawowe sposoby opisu niepewności, wybrane zagadnienia zastosowania estymacji rekursywnej dla potrzeb monitorowania i diagnostyki w systemach
Analiza obrazów - sprawozdanie nr 2
 Analiza obrazów - sprawozdanie nr 2 Filtracja obrazów Filtracja obrazu polega na obliczeniu wartości każdego z punktów obrazu na podstawie punktów z jego otoczenia. Każdy sąsiedni piksel ma wagę, która
Analiza obrazów - sprawozdanie nr 2 Filtracja obrazów Filtracja obrazu polega na obliczeniu wartości każdego z punktów obrazu na podstawie punktów z jego otoczenia. Każdy sąsiedni piksel ma wagę, która
Adam Korzeniewski - p. 732 dr inż. Grzegorz Szwoch - p. 732 dr inż.
 Adam Korzeniewski - adamkorz@sound.eti.pg.gda.pl, p. 732 dr inż. Grzegorz Szwoch - greg@sound.eti.pg.gda.pl, p. 732 dr inż. Piotr Odya - piotrod@sound.eti.pg.gda.pl, p. 730 Plan przedmiotu ZPS Cele nauczania
Adam Korzeniewski - adamkorz@sound.eti.pg.gda.pl, p. 732 dr inż. Grzegorz Szwoch - greg@sound.eti.pg.gda.pl, p. 732 dr inż. Piotr Odya - piotrod@sound.eti.pg.gda.pl, p. 730 Plan przedmiotu ZPS Cele nauczania
Podstawy opracowania wyników pomiarów z elementami analizy niepewności pomiarowych
 Podstawy opracowania wyników pomiarów z elementami analizy niepewności pomiarowych dla studentów Chemii (2018) Autor prezentacji :dr hab. Paweł Korecki dr Szymon Godlewski e-mail: szymon.godlewski@uj.edu.pl
Podstawy opracowania wyników pomiarów z elementami analizy niepewności pomiarowych dla studentów Chemii (2018) Autor prezentacji :dr hab. Paweł Korecki dr Szymon Godlewski e-mail: szymon.godlewski@uj.edu.pl
STATYSTYKA MATEMATYCZNA
 STATYSTYKA MATEMATYCZNA 1. Wykład wstępny 2. Zmienne losowe i teoria prawdopodobieństwa 3. Populacje i próby danych 4. Testowanie hipotez i estymacja parametrów 5. Najczęściej wykorzystywane testy statystyczne
STATYSTYKA MATEMATYCZNA 1. Wykład wstępny 2. Zmienne losowe i teoria prawdopodobieństwa 3. Populacje i próby danych 4. Testowanie hipotez i estymacja parametrów 5. Najczęściej wykorzystywane testy statystyczne
Systemy. Krzysztof Patan
 Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Procesy stochastyczne
 Wykład I: Istnienie procesów stochastycznych 21 lutego 2017 Forma zaliczenia przedmiotu Forma zaliczenia Literatura 1 Zaliczenie ćwiczeń rachunkowych. 2 Egzamin ustny z teorii 3 Do wykładu przygotowane
Wykład I: Istnienie procesów stochastycznych 21 lutego 2017 Forma zaliczenia przedmiotu Forma zaliczenia Literatura 1 Zaliczenie ćwiczeń rachunkowych. 2 Egzamin ustny z teorii 3 Do wykładu przygotowane
Stosowane metody wykrywania nieszczelności w sieciach gazowych
 Stosowane metody wykrywania nieszczelności w sieciach gazowych Andrzej Osiadacz, Łukasz Kotyński Zakład Systemów Ciepłowniczych i Gazowniczych Wydział Inżynierii Środowiska Politechniki Warszawskiej Międzyzdroje,
Stosowane metody wykrywania nieszczelności w sieciach gazowych Andrzej Osiadacz, Łukasz Kotyński Zakład Systemów Ciepłowniczych i Gazowniczych Wydział Inżynierii Środowiska Politechniki Warszawskiej Międzyzdroje,
Oznacza to, że chcemy znaleźć minimum, a właściwie wartość najmniejszą funkcji
 Wykład 11. Metoda najmniejszych kwadratów Szukamy zależności Dane są wyniki pomiarów dwóch wielkości x i y: (x 1, y 1 ), (x 2, y 2 ),..., (x n, y n ). Przypuśćmy, że nanieśliśmy je na wykres w układzie
Wykład 11. Metoda najmniejszych kwadratów Szukamy zależności Dane są wyniki pomiarów dwóch wielkości x i y: (x 1, y 1 ), (x 2, y 2 ),..., (x n, y n ). Przypuśćmy, że nanieśliśmy je na wykres w układzie
SMOP - wykład. Rozkład normalny zasady przenoszenia błędów. Ewa Pawelec
 SMOP - wykład Rozkład normalny zasady przenoszenia błędów Ewa Pawelec 1 iepewność dla rozkładu norm. Zamiast dodawania całych zakresów uwzględniamy prawdopodobieństwo trafienia dwóch wartości: P x 1, x
SMOP - wykład Rozkład normalny zasady przenoszenia błędów Ewa Pawelec 1 iepewność dla rozkładu norm. Zamiast dodawania całych zakresów uwzględniamy prawdopodobieństwo trafienia dwóch wartości: P x 1, x
Pobieranie prób i rozkład z próby
 Pobieranie prób i rozkład z próby Marcin Zajenkowski Marcin Zajenkowski () Pobieranie prób i rozkład z próby 1 / 15 Populacja i próba Populacja dowolnie określony zespół przedmiotów, obserwacji, osób itp.
Pobieranie prób i rozkład z próby Marcin Zajenkowski Marcin Zajenkowski () Pobieranie prób i rozkład z próby 1 / 15 Populacja i próba Populacja dowolnie określony zespół przedmiotów, obserwacji, osób itp.
REGRESJA I KORELACJA MODEL REGRESJI LINIOWEJ MODEL REGRESJI WIELORAKIEJ. Analiza regresji i korelacji
 Statystyka i opracowanie danych Ćwiczenia 5 Izabela Olejarczyk - Wożeńska AGH, WIMiIP, KISIM REGRESJA I KORELACJA MODEL REGRESJI LINIOWEJ MODEL REGRESJI WIELORAKIEJ MODEL REGRESJI LINIOWEJ Analiza regresji
Statystyka i opracowanie danych Ćwiczenia 5 Izabela Olejarczyk - Wożeńska AGH, WIMiIP, KISIM REGRESJA I KORELACJA MODEL REGRESJI LINIOWEJ MODEL REGRESJI WIELORAKIEJ MODEL REGRESJI LINIOWEJ Analiza regresji
Ewa Dziawgo Uniwersytet Mikołaja Kopernika w Toruniu. Analiza wrażliwości modelu wyceny opcji złożonych
 DYNAMICZNE MODELE EKONOMETRYCZNE X Ogólnopolskie Seminarium Naukowe, 4 6 września 7 w Toruniu Kaedra Ekonomerii i Saysyki, Uniwersye Mikołaja Kopernika w Toruniu Uniwersye Mikołaja Kopernika w Toruniu
DYNAMICZNE MODELE EKONOMETRYCZNE X Ogólnopolskie Seminarium Naukowe, 4 6 września 7 w Toruniu Kaedra Ekonomerii i Saysyki, Uniwersye Mikołaja Kopernika w Toruniu Uniwersye Mikołaja Kopernika w Toruniu
Stanisław Cichocki Natalia Nehrebecka. Wykład 4
 Sanisław Cichocki Naalia Nehrebecka Wykład 4 1 1. Badanie sacjonarności: o o o Tes Dickey-Fullera (DF) Rozszerzony es Dickey-Fullera (ADF) Tes KPSS 2. Modele o rozłożonych opóźnieniach (DL) 3. Modele auoregresyjne
Sanisław Cichocki Naalia Nehrebecka Wykład 4 1 1. Badanie sacjonarności: o o o Tes Dickey-Fullera (DF) Rozszerzony es Dickey-Fullera (ADF) Tes KPSS 2. Modele o rozłożonych opóźnieniach (DL) 3. Modele auoregresyjne
VII. ZAGADNIENIA DYNAMIKI
 Konderla P. Meoda Elemenów Skończonych, eoria i zasosowania 47 VII. ZAGADNIENIA DYNAMIKI. Równanie ruchu dla zagadnienia dynamicznego Q, (7.) gdzie M NxN macierz mas, C NxN macierz łumienia, K NxN macierz
Konderla P. Meoda Elemenów Skończonych, eoria i zasosowania 47 VII. ZAGADNIENIA DYNAMIKI. Równanie ruchu dla zagadnienia dynamicznego Q, (7.) gdzie M NxN macierz mas, C NxN macierz łumienia, K NxN macierz