Materiały pomocnicze do wykładu
|
|
|
- Szczepan Popławski
- 8 lat temu
- Przeglądów:
Transkrypt

1 Materiały pomocnicze do wykładu 1
2 Plan zajęć Podstawowe wiadomości o sygnałach Szeregi Fouriera Ciągła Transformata Fouriera Sygnały cyfrowe Próbkowanie sygnałów. Zjawisko aliasingu Dyskretna i Szybka Transformata Fouriera Przekształcenie Z Filtry cyfrowe FIR i IIR 2
3 1. Tomasz P. Zieliński - Cyfrowe przetwarzanie sygnałów. Od teorii do zastosowań, WKŁ, 2009, 2. Richard G. Lyons, Wprowadzenie do cyfrowego przetwarzania sygnałów, WKŁ, 2010 (wyd. 2 rozszerzone), 3. Jerzy Szabatin, Podstawy teorii sygnałów, WKŁ, 1982 i późniejsze, 4. Izydorczyk J., Płonka G., Tyma G. - Teoria sygnałów. Wstęp. Wydanie II, Helion


4 pojecie sygnału jest rozumiane jako proces zmian w czasie pewnej wielkości fizycznej lub stanu obiektu fizycznego. za modele matematyczne sygnałów przyjmujemy funkcje, których argumentem jest czas t gdyż opisują one ewolucje sygnałów w czasie. W najprostszym przypadku są to funkcje tylko jednej zmiennej t. W przypadkach bardziej złożonych, np. w teorii linii długich lub zagadnieniach przetwarzania obrazów, mogą to być funkcje wielu zmiennych: czasu i współrzędnych przestrzennych. 4


5 Klasyfikacja (podział sygnałów) - ze względu na model matematyczny: - rzeczywiste. - zespolone, - dystrybucyjne -ze względu na możliwość przewidywania wartości sygnału w danej chwili: -deterministyczne, -losowe, - ze względu na dziedzinę określoności: - ciągłe, - dyskretne, 5
6 sygnały ciągłe: Sygnały określone w zbiorze ciągłym osi czasu są nazywane sygnałami ciągłymi w czasie lub krótko sygnałami ciągłymi. Najczęściej dziedziną takich sygnałów jest cała os (, ), dodatnia półoś [0, ) lub odcinek [t1, t2] osi czasu. sygnały dyskretne: Sygnały określone w dyskretnym (przeliczalnym lub skończonym) zbiorze punktów osi czasu (..., t 1, t0, t1, t2,... ) i nieokreślone w pozostałych punktach są nazywane sygnałami dyskretnymi w czasie lub krótko sygnałami dyskretnymi. Najczęściej dziedziną tych sygnałów jest zbiór chwil tn = nts, n, odległych od siebie o stały odstęp Ts nazywany przedziałem dyskretyzacji 6
7 - ze względu na przybieranie wartości różnych od zera: - w przedziale nieskończonym sygnały o nieskończonym czasie trwania, - w przedziale skończonym sygnały o skończonym i czasie trwania. - ze względu na dziedzinę i przeciwdziedzinę (zbiór wartości) ciągłe w czasie i ciągłe w amplitudzie (nazywane także analogowymi), ciągłe w czasie i dyskretne w amplitudzie, dyskretne w czasie i ciągłe w amplitudzie, dyskretne w czasie i dyskretne w amplitudzie szczególny rodzaj sygnały binarne (przybierają tylko wartości 0 i 1) 7
8 Sygnał i informacja Czy każdy sygnał niesie ze sobą informacje? Jeśli sygnał jest deterministyczny, znamy dokładnie jego przebieg w przeszłości, wartość w chwili bieżącej i zachowanie sie w przyszłości. Nasza wiedza o nim jest pełna. Nie może on nam zatem dostarczyć informacji, np. funkcja sin(t). Informacje przekazują tylko takie sygnały, które dla odbiorcy są losowe Sygnałami losowymi są: sygnały transmitowane w systemach komunikacyjnych powszechnego użytku: telefonicznych, radiowych, telewizyjnych. 8
9 Sygnały analogowe - podstawy notacja x(t), y(t), z(t) itd... parametry - wartość średnia, - wartość skuteczna - energia, - moc, 9
10 Wartość średnia Wartość średnia analogowego impulsowego sygnału deterministycznego x(t) określonego w przedziale [t1, t2] jest całka z tego sygnału w przedziale [t1, t2] odniesiona do szerokości tego przedziału: W przypadku sygnałów o nieskończonym czasie trwania wartość średnia jest określona jako wielkość graniczna:
11 Wartość średnia W szczególnym przypadku, gdy sygnał o nieskończonym czasie trwania jest sygnałem okresowym o okresie To, uśrednianie w czasie nieskończonym jest równoważne uśrednianiu za okres: przy czym chwila to jest dowolna.
12 Energia i Moc sygnału Energią analogowego sygnału deterministycznego x(t) nazywamy wielkość: Mocą (średnia) analogowego sygnału deterministycznego x(t) nazywamy wielkość graniczną:
13 W przypadku sygnałów okresowych wzór przybiera postać: gdzie To jest okresem, a to dowolna chwila. UWAGA: zdefiniowane wielkości energii i mocy sygnału nie maja sensu nadawanego im w fizyce i należy je rozumieć w znaczeniu uogólnionym, przy przyjętym założeniu bezwymiarowości sygnałów wymiarem energii sygnału jest sekunda, a moc jest bezwymiarowa, gdyby jednak sygnał był sygnałem napięcia lub prądu, to wydzieliłby na oporze jednostkowym 1Ω energie (lub moc) równa liczbowo wielkości wyznaczonej na podstawie podanych zależności.
14 Wartość skuteczna Wartością skuteczną sygnału jest nazywany pierwiastek z jego mocy: czyli:
15 Energia i moc charakteryzują właściwości energetyczne sygnału. Na ich podstawie sygnały deterministyczne są dzielone na dwie podstawowe rozłączne klasy. 1) Sygnał x(t) jest nazywany sygnałem o ograniczonej energii, jeśli: 2) Sygnał x(t) jest nazywany sygnałem o ograniczonej mocy, jeśli: moc sygnałów o ograniczonej energii jest równa zeru. energia sygnałów o ograniczonej mocy jest nieskończona. klasa sygnałów o ograniczonej energii obejmuje oczywiście wszystkie sygnały impulsowe ograniczone w amplitudzie, ale nie tylko. Do klasy tej należą także sygnały o nieskończonym czasie trwania, których wartości maleją dostatecznie szybko w funkcji czasu. sygnały o ograniczonej mocy i ograniczone w amplitudzie są sygnałami o nieskończonym czasie trwania. Szczególna podklasa tych ostatnich są sygnały okresowe.
16 Sygnał harmoniczny parametry sygnału harmonicznego: - amplituda X0, - pulsacja - ꙍ0, - faza początkowa φ0 gdzie: fo częstotliwość, To - okres 16
17 Każdy okresowy sygnał ciągły f(t) spełniający warunki Dirichleta można zapisać w postaci nieskończonej sumy składowych sinusoidalnych: 17

18 gdzie: a0 jest wartością średnią sygnału ak i bk są trygonometrycznymi współczynnikami Fouriera 18

19 Korzystając z właściwości iż każdą liczbę zespoloną można zapisać w postaci wykładniczej i trygonometrycznej funkcję f(t) można przedstawić w postaci nieskończonego zespolonego szeregu wykładniczego: gdzie ck są zespolonymi współczynnikami Fouriera: 19
20 uwzględniając zależności Eulera: trygonometryczne współczynniki Fouriera można wyznaczyć ze współczynnika zespolonego: 20
21 Widmo amplitudowe sygnału f(t): Widmo fazowe sygnału f(t): 21
22 przykład: znaleźć trygonometryczne współczynniki Fouriera sygnału prostokątnego: 22
23 W miarę wzrostu N sygnał prostokątny będzie dokładniej aproksymowany N=1 N=5 N=11 N=30 N=150 23
24 widmo amplitudowe widmo fazowe 24
25 Dyskretne widmo Fouriera istnieje dla sygnałów okresowych. Natomiast w praktycznych zastosowaniach istnieje konieczność analizy sygnałów nieokresowych. Jeśli sygnał nieokresowy potraktuje się jako sygnał periodyczny o okresie dążącym do nieskończoności, to dyskretne widmo Fouriera takiego sygnału przechodzi w granicy w widmo ciągłe n d T d T T ) ( ) ( ) ( ) ( ) ( ) ( j X F d e j X t x t x F dt e t x j X t j t j Para transformat Fouriera transformata prosta zespolone widmo sygnału transformata odwrotna 25
26 Re( j ) 2 Im( j 2 X( j ) Im( j ) arc tg Re( j ) widmo amplitudowe sygnału widmo fazowe sygnału Transformata Fouriera przekształca sygnał z dziedziny czasu na dziedzinę częstotliwości (widmo) nco często upraszcza analizę sygnału. - widmo sygnału ciągłego jest widmem ciągłym 26
27 liniowość ax( t ) by( t ) ax( ) by( ) zmiana skali (podobieństwo) x( at ) 1 a X a Jeśli a>1, to skala czasu jest rozszerzana, sygnał jest rozciągnięty w czasie. Rozszerzenie skali czasu powoduje zawężenie skali częstotliwości i jednocześnie zwiększa się a-krotnie gęstość widmowa. Fizycznie oznacza to, że zmniejsza się szybkość zmian sygnału, a widmo skupia się wokół małych częstotliwości, jego gęstość w tym zakresie wzrasta. Dla 0<a<1 sygnał jest ściśnięty w czasie, a efekty w dziedzinie częstotliwości są przeciwne. 27
28 przesunięcie w dziedzinie czasu x( t t ) X( ) e 0 jt Przesunięcie sygnału na osi czasu o t 0 odpowiada pomnożeniu widma przez czynnik zespolony. 0 Widmo amplitudowe sygnału przesuniętego nie ulega zmianie w stosunku do widma amplitudowego sygnału nieprzesuniętego. Natomiast widmo fazowe powiększa się o składnik (- 0 t). Jest to całkowicie zgodne z sensem fizycznym przesunięcia sygnału na osi czasu. Struktura częstotliwościowa amplitud poszczególnych harmonicznych sygnału nie zmienia się. Zmieniają się natomiast fazy poszczególnych harmonicznych względem układu odniesienia. 28
29 przesunięcie w dziedzinie częstotliwości (modulacja) jt 0 x( t ) e X( 0 ) Jeśli widmo sygnału przesuwa się w prawo o wartość 0 >0, to sygnał należy j t pomnożyć przez sygnał wykładniczy zespolony, czyli e 0 jt 0 x( t ) e X( 0 ) Przesunięcie widma sygnału w lewo o wartość 0 >0 odpowiada pomnożeniu j0t sygnału przez sygnał zespolony e, a więc jt 0 x( t ) e X( 0 ) 29
30 Dodając stronami powyższe pary transformat otrzymuje się 1 x( t )cos 0t X( 0 ) X( 0 2 ) Z powyższej zależności wynika, że pomnożenie sygnału harmonicznego przez sygnał x(t) powoduje rozszczepienie widma na dwie części przemieszczone w prawo i w lewo o wartość 0. Operacja ta nazywana jest modulacją i wykorzystywana jest w telekomunikacji do przesyłania sygnałów na dalsze odległości. Sygnałem modulowanym jest sygnał harmoniczny (informacja zawarta jest w jego częstotliwości), a sygnałem modulującym sygnał x(t). 30
 sin( ) ( / / /")
31 31 impuls prostokątny t x(t) t -/2 /2 0 A A Sa A A A j j A e e j A e j A dt Ae X j j t j t j sin sin ) sin( ) ( / / / /
 2A - 0 t 8 4 4 8")
32 A x(t) A 2 -/40 /4 t A x(t) 2A - 0 t
33
34
35
36
37
38
39
40
41 Obliczanie transformaty bezpośrednio ze wzoru jest nieefektywne ze względu na zbyt dużą złożoność obliczeniową. Wzrost wydajności przy zastosowaniu FFT Algorytm FFT zmniejsza ilość operacji matematycznych potrzebnych do obliczenia wartości transformaty 41
42 sygnały analogowe ciągłe w czasie i amplitudzie sygnały cyfrowe dyskretne w amplitudzie i czasie ciąg dyskretnych wartości danej wielkości fizycznej gdzie tp okres próbkowania
43 x(0) = 0, (pierwsza wartość ciągu, n=0 ) x(1) = , (druga wartość ciągu, n=1 ) x(2) = , (trzecia wartość ciągu, n=2 ) x(3) = , (czwarta wartość ciągu, n=3 ) x(n) ciąg x argumentu n, n t s - wartości czasu dyskretnego poza wartościami nt s sygnał dyskretny nie jest określony
44 44
45 System dyskretny układ przekształcający dyskretny ciąg wejściowy próbek x(n) w ciąg wyjściowy y(n) x(0), x(1), x(2), x(3)... y(0), y(1), y(2), y(3)... System dyskretny x(n) System dyskretny y(n)
46 b(n) b(n) dodawanie a(n) + c(n) c(n)=a(n)+b(n) odejmowani e a(n) c(n) c(n)=a(n)-b(n)
47 sumowanie b(n) b(n+1) + b(n+2) b(n+3) gdy n = 0, k zmienia się od 0 do 3, a(0) = b(0) + b(1) + b(2) + b(3) gdy n = 1, k zmienia się od 1 do 4, a(1) = b(1) + b(2) + b(3) + b(4) gdy n = 2, k zmienia się od 2 do 5, a(2) = b(2) + b(3) + b(4) + b(5) gdy n = 3, k zmienia się od 3 do 6, a(3) = b(3) + b(4) + b(5) + b(6)
48 b(n) mnożenie a(n) c(n) c(n)=a(n) b(n) c(0)=a(0) b(0) c(1)=a(1) b(1) c(2)=a(2) b(2), itd... opóźnienie a(n) opóźnienie b(n) a(n) z -1 b(n) b(n) = a(n-1)
49 proces reprezentowania sygnału o czasie ciągłym za pomocą próbek pobieranych w dyskretnych chwilach czasu. Problem: z jaką szybkością sygnał musi być próbkowany w celu zachowania jego zawartości informacyjnej?
50 dany jest ciąg próbek: Przykład: x(0) = 0, x(1) = , x(2) = , x(3) = 0, x(4) = , x(5) = , x(6) = 0,
51 Pytanie: Jaki sygnał jest reprezentowany przez dany ciąg próbek??
52 Pytanie: Jaki sygnał jest reprezentowany przez dany ciąg próbek??
53 Niejednoznaczność częstotliwości dwa różne przebiegi są reprezentowane przez ten sam ciąg dyskretny, nie można jednoznacznie określić częstotliwości jedynie na podstawie wartości próbek ciągu wejściowego
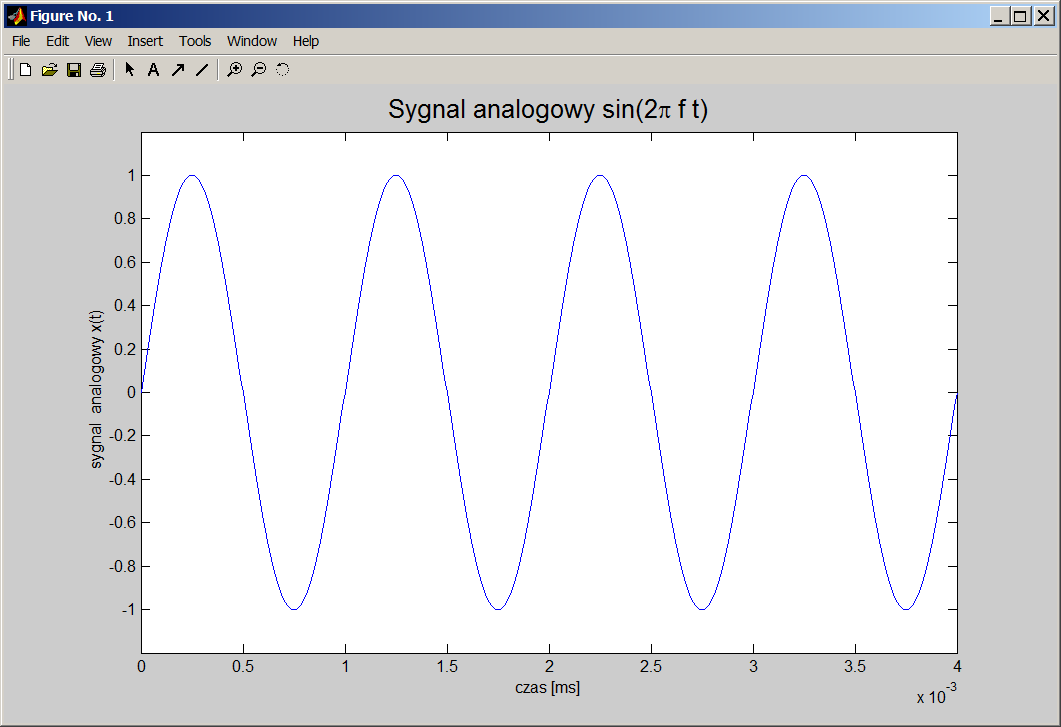
54 Dany jest sygnał: x(t) = sin(2πf 0 t) próbkujemy sygnał x(t) z szybkością f s próbek/s tj. w równomiernych odstępach t s sekund gdzie ts=1/f s Rozpoczynając próbkowanie w chwili 0t s, 1t s, 2t s itd.. wartości n kolejnych próbek mają wartości: 0 próbka: x(0) = sin(2πf 0 0 t s ) 1 próbka: x(1) = sin(2πf 0 1 t s ) 2 próbka: x(2) = sin(2πf 0 2 t s ) nta próbka: x(n) = sin(2πf 0 n t s )
55 Wartość n-tej próbki ciągu x(n) jest równa wartości oryginalnego sygnału sinusoidalnego w chwili n t s Dwie wartości przebiegu sinusoidalnego są identyczne gdy odległe są o całkowitą wielokrotność 2π radianów tj: sin(α) = sin(α+ 2πm), gdzie m jest dowolną liczb. całk. Korzystając z tej zależności: zakładając, że m będzie całkowitą wielokrotnością n tj. m = k n
56 Z uwagi na to że: i wiedząc że: f s = 1/t s stąd: co oznacza, że ciąg x(n) próbek reprezentujących przebieg sinusoidalny o częstotliwości f 0 równie dokładnie reprezentuje przebiegi sinusoidalne o innych częstotliwościach tj.: f 0 + kf s
57 Podsumowując: Podczas próbkowania z szybkością fs próbek/s, jeśli k jest dowolną liczbą całkowitą, nie jesteśmy w stanie rozróżnić spróbkowanych wartości przebiegu sinuisodalnego o częstotliwości f 0 oraz przebiegu sinusoidalnego o częstotliwości (f o +kf s ).
58 Przykład: Spróbkujmy sygnał o częstotliwości 7kHz z szybkością 6000 próbek/s. czyli : f 0 =7kHz, f s =6kHz, k=-1 f 0 +kf s = [7+ (-1) 6] = 1kHz stąd wynikałoby, że ciąg wartości próbek będzie identyczny dla częstotliwości 1kHz
59 Wartości próbek nie zmienią się gdyby próbkowany był sygnał o częstotliwości 1kHz z tą sama szybkością: Odpowiedź na pytanie która częstotliwość odpowiada wartościom próbek zaznaczonych na niebiesko brzmi: NIE WIADOMO!!! istnieje nieskończenie wiele częstotliwości odpowiadających tym próbkom.
60 Przykład 2: Spróbkujmy sygnał o częstotliwości 4kHz z szybkością 6000 próbek/s. f 0 +kf s = [4+ (-1 6)] = -2kHz stąd wynikałoby, że ciąg wartości próbek będzie identyczny dla częstotliwości -2kHz sin(2π 4000t) sin(2π (-2000)t)
61 Jeśli ograniczymy nasze zainteresowanie do pasma w zakresie częstotliwości od fs/2 do fs/2 okaże się, że w danym paśmie będzie można jednoznacznie odtworzyć sygnał z próbek. interesujące nas pasmo częstotliwości 3,5 3 2,5 2 1,5 1 0, fs/2 fs fs/2 częstotliwość khz
62 - wartości szczytowe położone są przy wielkrotności częstotliwości próbkowania, - próbkowanie sygnału sin. o częst. 7kHz z częst. 6kHz dostarczy dyskretnego ciągu liczb, które dokładnie w taki sam sposób opiszą sygnał o częst. 13kHz, 19kHz itd... - podobnie z sygnałem sin o częst. 4 khz... interesujące nas pasmo częstotliwości powielenie powielenie powielenie 1,2 1 0,8 0,6 0,4 0, ,5 0 0,5 1 1,5 2 2,5 3 3,5 4 -fs/2 0 fs/2 fs 2fs 3fs częstotliwość khz
63 Idealny sygnał dolnopasmowy:
64 Dany jest sygnał dolnopasmowy ( o ograniczonym paśmie) o widmie: 3,5 3 2,5 2 1,5 1 0, Widmo jest symetryczne względem osi częstotliwości, - w sygnale nie ma częstotliwości ꙍ >ꙍ 0
65 Próbkowanie tego sygnału spowoduje powielenie widma względem częstotliwości próbkowania f s. Jeżeli f s > 2ꙍ 0 widmo sygnału spróbkowanego: 3,5 3 2,5 2 1,5 1 0,5 0 -ꙍ 0 -ꙍ
66 Kryterium Nyquista aby odseparować od siebie powielone widma przy częstotliwościach ±fs/2 częstotliwość próbkowania spełniać związek: fs 2ꙍ 0 Twierdzenie Kotielnikowa Shannona Sygnał ciągły może być wiernie odtworzony z ciągu swoich próbek tworzących sygnał dyskretny, jeśli próbki te zostały pobrane z częstotliwością co najmniej dwukrotnie większą od granicznej częstotliwości swego widma (warunek Nyquista).
67 Części powieleń widma łączą się z widmem oryginalnym rezultatem jest tzw. błąd aliasingu. Dyskretne widmo spróbkowane nie reprezentuje oryginalnego sygnału. Widmo w pasmach: -ꙍ 0 do -ꙍ 0 /2 i ꙍ 0 do ꙍ 0 /2 zostało zniekształcone pojawił się aliasing przeciek widma z jednego powielenia do drugiego. aliasing aliasing aliasing aliasing -2fs -fs -fs/2 fs/2 fs częstotliwość -ꙍ 0 ꙍ 0 /2 ꙍ 0 /2 ꙍ 0
68 Wszystkie składowe oryginalnego sygnału spróbkowanego będą znajdować się w paśmie zainteresowania tj. fs/2 do fs/2. Efektem tego jest to, że każda składowa powyżej ꙍ 0 i poniżej - ꙍ 0 zawsze znajdzie się w interesującym nas paśmie niezależnie od szybkości próbkowania. Z tego powodu zawsze przed przewarzaniem AC stosowane są filtry dolnoprzepustowe ograniczające pasmo do interesującej szerokości

69 Rzeczywiste sygnały w swoim widmie oprócz istotnych informacji zawartych w swoim paśmie zawierają szum który jest nieistotny a w wyniku operacji próbkowania może zniekształcić widmo sygnału spróbkowanego. szum interesujące pasmo szum fs -fs -fs/2 fs/2 częstotl.
70 - Próbkowanie sygnału dolnopasmowego (wraz z towarzyszącym mu szumem) z częstotliwością próbkowania fs > 2 ꙍ 0 zapobiega nakładaniu się widma interesującego sygnału, -nie chroni to jednak przed pojawieniem się energii szumu w paśmie pomiędzy fs/2 a fs/2. -fs - fs/2 fs/2 fs
71 szum szum -ꙍ 0 ꙍ 0 oryginalny sygnał ciągły Analogowy filtr dolnoprzepustowy częst. graniczna ꙍ 0 przefiltrowany sygnał ciągły Przetwornik A/C próbki dyskretne
72 W praktyce często próbkowane są analogowe sygnały pasmowe czyli takie, których ograniczone pasmo jest skupione wokół pewnej częstotliwości różnej od zera. Do tego typu sygnałów można z powodzeniem stosowad próbkowanie dolnopasmowe, jednak zastosowanie specjalnej techniki zwanej próbkowaniem pasmowym pozwala znacznie zmniejszyd koszty realizacji sprzętowej, polegającej na zmniejszeniu szybkości przetwornika A/C oraz zmniejszeniu pamięci wymaganej do pamiętania wartości próbek.
73 Jako przykład próbkujmy przebieg pasmowy o szerokości pasma B=5kHz, skupiony wokół częstotliwości fbcb=20khz. Zgodnie z kryterium Nyquista, ponieważ najwyższa składowa częstotliwościowa w sygnale ma wartośd 22,5kHz należy próbkowad sygnał z częstotliwością nie mniejszą niż 45kHz. Próbkowanie tego sygnału z częstotliwością znacznie mniejszą, równą 17,5 khz. Można zauważyd, że mimo mniejszej częstotliwości próbkowania powielenia widma nie zniekształcają widma oryginalnego skupionego wokół częstotliwości fc. Unikamy aliasingu. Okazuje się że próbkowanie z częstotliwością 45kHz nie jest konieczne.
74 Dany jest ciągły sygnał pasmowy o szerokości pasma B, o częstotliwości nośnej fc. Próbkujemy ten sygnał z dowolną częstotliwością fc. Maksymalna częstotliwośd próbkowania : Przy arbitralnej liczbie powieleo widma m w przedziale 2fc-B sygnał można próbkowad z maksymalną częstotliwością fp1 taką że:
75 Widmo sygnału dyskretnego, w przedziale 2fc-B sygnał można próbkowad z maksymalną częstotliwością fp1: Minimalna częstotliwośd próbkowania: Jeżeli szybkośd próbkowania zmniejsza się to powielenia przesuwają się i osiągamy dolną granicę częstotliwości próbkowania fp2. Przy arbitralnej liczbie powieleo widma m w przedziale 2fc+B sygnał można próbkowad z minimalną częstotliwością fp2 taką że:
76 Widmo sygnału dyskretnego, w przedziale 2fc+B, sygnał można próbkowad z minimalną częstotliwością fp2:
77 W ten sposób otrzymujemy zależnośd definiującą zakres częstotliwości próbkowania pasmowego zależną od szerokości pasma sygnału, częstotliwości nośnej i liczby powieleo: przy czym m jest dowolną liczbą naturalną zapewniającą spełnianie kryterium Nyquista w odniesieniu do szerokości pasma sygnału
78 Przykład: Przebieg pasmowy o szerokości pasma B=5kHz i częstotliwości nośnej fc=20khz. Za optymalną częstotliwośd próbkowania przyjmuje się taką przy której powielenia widma stykają się ze sobą w punkcie f = 0Hz. Przy tak przyjętej częstotliwości próbkowania błędy związane dalszym przetwarzaniem cyfrowym (np. filtrowaniem) sygnału są minimalne
79 Zdefiniujemy nowy parametr R jako stosunek częstotliwości najwyższej w paśmie sygnału do szerokości pasma Wykreślimy zależnośd minimalnej częstotliwości próbkowania od parametru R dla różnych wartości m
80 Wynika z tego, że niezależnie od R minimalna częstotliwośd próbkowania nie przekracza 4B i zmniejsza się dążąc do 2B przy zwiększaniu częstotliwości nośnej (wzrost R).
81 Wprowadzając na wykresie warunek ograniczający częstotliwośd z góry (maksymalną) otrzymamy obszary częstotliwości zakazanych i dozwolonych związanych z odpowiednią wartością parametru m.
82 Wprawdzie z rysunku wynika, że możemy stosowad częstotliwości próbkowania, które leżą na granicy strefy zakazanej i dozwolonej, jednak w praktycznych zastosowaniach należy wybierad częstotliwości nieco oddalone od tych granic. Takie postępowanie pozwala uniknąd np. problemów związanych z niedokładnością filtrów pasmowych, niestabilnością zegara układu próbkującego itp.
83
84
85
86 Uwzględnienie niedokładności próbkowania Δfp oraz marginesu zmian widma sygnału ΔB
87 Przekształcenie Z Przekształcenie Laplace a: Funkcja F(s) jest transformatą Laplace a funkcji f(t) zmienna s jest liczbą zespoloną: s= σ +jω Czynnik e -st jest zespoloną wirującą tłumioną sinusoidą:
88 Przekształcenie Z Funkcja transmitancji: iloraz transformaty Laplace s wielkości wejściowej X(s) przez transformatę Laplace a wartości wyjściowej Y(s) X(s) H(s) Y(s) Czyli w dziedzinie operatorowej: Y(s) = X(s) H(s)
89 Przekształcenie Z Odpowiedź impulsowa układu: Odpowiedź układu liniowego na wymuszenie w postaci bardzo wąskiego i bardzo wysokiego impulsu o powierzchni jednostkowej, który można uznać, w przypadku układów ciągłych, za przybliżenie delty Diraca - przy zerowych warunkach początkowych (w przypadku układów dyskretnych impulsem tym jest impuls Kroneckera). Odpowiedź impulsowa układu jest odwrotną transformatą Laplace a funkcji transmitancji H(s)
90 Przekształcenie Z Związek pomiędzy transmitancją a odpowiedzią impulsową układu gdzie: h(t)*y(t) jest splotem odpowiedzi impulsowej układu i pobudzenia
91 Przekształcenie Z
92 Przekształcenie Z
93 Przekształcenie Z
94 Przekształcenie Z
95 Przekształcenie Z
96 Przekształcenie Z

97 Przekształcenie Z
98 Przekształcenie Z
99 Przekształcenie Z
100 Przekształcenie Z
101 Przekształcenie Z
102 Przekształcenie Z
103 Przekształcenie Z

104 Przekształcenie Z
105 Przekształcenie Z
106 Przekształcenie Z
. Oznacza to tyle, że reakcja na wyjściu tego układu na pobudzenie o skończonej długości jest również skończona (przez długość pobudzenia i odpowiedzi rozumiemy tu długość odcinka czasu, dla")
107 Filtry cyfrowe FIR i IIR Filtr o skończonej odpowiedzi impulsowej - (Finite Impulse Response filter FIR ) Nazwa FIR oznacza filtr o skończonej odpowiedzi impulsowej (polski skrót tej nazwy to filtr SOI). Oznacza to tyle, że reakcja na wyjściu tego układu na pobudzenie o skończonej długości jest również skończona (przez długość pobudzenia i odpowiedzi rozumiemy tu długość odcinka czasu, dla którego próbki sygnału przyjmują wartości niezerowe). Aby warunek ten był spełniony, w filtrach tego typu nie występuje pętla sprzężenia zwrotnego.
108 Filtry cyfrowe FIR i IIR
109 Filtry cyfrowe FIR i IIR
110 Filtry cyfrowe FIR i IIR
111 Filtry cyfrowe FIR i IIR
112 Filtry cyfrowe FIR i IIR
113 Filtry cyfrowe FIR i IIR
 oznacza nieskończoną odpowiedź impulsową (w polskiej literaturze stosowany jest również skrót NOI).")
114 Filtry cyfrowe FIR i IIR Filtr IIR jest jednym z rodzajów filtrów cyfrowych, który w odróżnieniu od filtrów FIR jest układem rekursywnym. Skrót IIR (ang. Infinite Impulse Response) oznacza nieskończoną odpowiedź impulsową (w polskiej literaturze stosowany jest również skrót NOI). Znaczy to tyle, że reakcja na pobudzenie o skończonym czasie trwania jest teoretycznie nieskończenie długa. Jest to efektem występowania pętli sprzężenia zwrotnego
Materiały pomocnicze do wykładu
 do wykładu 1 1. Tomasz P. Zieliński - Cyfrowe przetwarzanie sygnałów. Od teorii do zastosowań, WKŁ, 2009, 2. Richard G. Lyons, Wprowadzenie do cyfrowego przetwarzania sygnałów, WKŁ, 2010 (wyd. 2 rozszerzone),
do wykładu 1 1. Tomasz P. Zieliński - Cyfrowe przetwarzanie sygnałów. Od teorii do zastosowań, WKŁ, 2009, 2. Richard G. Lyons, Wprowadzenie do cyfrowego przetwarzania sygnałów, WKŁ, 2010 (wyd. 2 rozszerzone),
Transformata Laplace a to przekształcenie całkowe funkcji f(t) opisane następującym wzorem:
 opisane następującym wzorem:") PPS 2 kartkówka 1 RÓWNANIE RÓŻNICOWE Jest to dyskretny odpowiednik równania różniczkowego. Równania różnicowe to pewne związki rekurencyjne określające w sposób niebezpośredni wartość danego wyrazu ciągu.
PPS 2 kartkówka 1 RÓWNANIE RÓŻNICOWE Jest to dyskretny odpowiednik równania różniczkowego. Równania różnicowe to pewne związki rekurencyjne określające w sposób niebezpośredni wartość danego wyrazu ciągu.
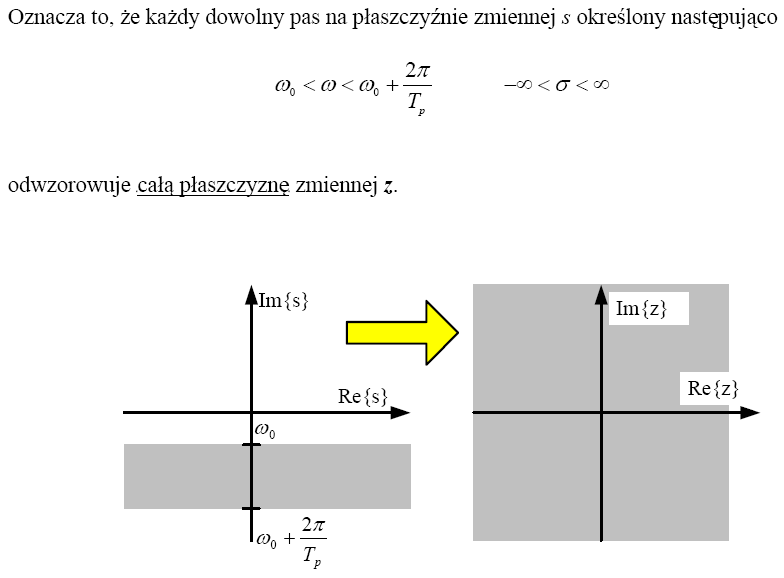
2. Próbkowanie Sygnały okresowe (16). Trygonometryczny szereg Fouriera (17). Częstotliwość Nyquista (20).
. Trygonometryczny szereg Fouriera (17). Częstotliwość Nyquista (20).") SPIS TREŚCI ROZDZIAŁ I SYGNAŁY CYFROWE 9 1. Pojęcia wstępne Wiadomości, informacje, dane, sygnały (9). Sygnał jako nośnik informacji (11). Sygnał jako funkcja (12). Sygnał analogowy (13). Sygnał cyfrowy
SPIS TREŚCI ROZDZIAŁ I SYGNAŁY CYFROWE 9 1. Pojęcia wstępne Wiadomości, informacje, dane, sygnały (9). Sygnał jako nośnik informacji (11). Sygnał jako funkcja (12). Sygnał analogowy (13). Sygnał cyfrowy
Ćwiczenie 3. Właściwości przekształcenia Fouriera
 Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 3. Właściwości przekształcenia Fouriera 1. Podstawowe właściwości przekształcenia
Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 3. Właściwości przekształcenia Fouriera 1. Podstawowe właściwości przekształcenia
Akwizycja i przetwarzanie sygnałów cyfrowych
 Akwizycja i przetwarzanie sygnałów cyfrowych Instytut Teleinformatyki ITI PK Kraków 21 luty 2011 Plan na dziś 1 Przedstawienie przedmiotu i zakresu wykładu polecanej iteratury zasad zaliczenia 2 Wyklad
Akwizycja i przetwarzanie sygnałów cyfrowych Instytut Teleinformatyki ITI PK Kraków 21 luty 2011 Plan na dziś 1 Przedstawienie przedmiotu i zakresu wykładu polecanej iteratury zasad zaliczenia 2 Wyklad
Kartkówka 1 Opracowanie: Próbkowanie częstotliwość próbkowania nie mniejsza niż podwojona szerokość przed spróbkowaniem.
 Znowu prosta zasada - zbierzmy wszystkie zagadnienia z tych 3ech kartkówek i opracujmy - może się akurat przyda na dopytkę i uda się zaliczyć labki :) (dodatkowo można opracowania z tych rzeczy z doc ów
Znowu prosta zasada - zbierzmy wszystkie zagadnienia z tych 3ech kartkówek i opracujmy - może się akurat przyda na dopytkę i uda się zaliczyć labki :) (dodatkowo można opracowania z tych rzeczy z doc ów
1. Modulacja analogowa, 2. Modulacja cyfrowa
 MODULACJA W16 SMK 2005-05-30 Jest operacja mnożenia. Jest procesem nakładania informacji w postaci sygnału informacyjnego m.(t) na inny przebieg o wyższej częstotliwości, nazywany falą nośną. Przyczyna
MODULACJA W16 SMK 2005-05-30 Jest operacja mnożenia. Jest procesem nakładania informacji w postaci sygnału informacyjnego m.(t) na inny przebieg o wyższej częstotliwości, nazywany falą nośną. Przyczyna
Cyfrowe przetwarzanie sygnałów Jacek Rezmer -1-
 Cyfrowe przetwarzanie sygnałów Jacek Rezmer -1- Filtry cyfrowe cz. Zastosowanie funkcji okien do projektowania filtrów SOI Nierównomierności charakterystyki amplitudowej filtru cyfrowego typu SOI można
Cyfrowe przetwarzanie sygnałów Jacek Rezmer -1- Filtry cyfrowe cz. Zastosowanie funkcji okien do projektowania filtrów SOI Nierównomierności charakterystyki amplitudowej filtru cyfrowego typu SOI można
Transformata Fouriera
 Transformata Fouriera Program wykładu 1. Wprowadzenie teoretyczne 2. Algorytm FFT 3. Zastosowanie analizy Fouriera 4. Przykłady programów Wprowadzenie teoretyczne Zespolona transformata Fouriera Jeżeli
Transformata Fouriera Program wykładu 1. Wprowadzenie teoretyczne 2. Algorytm FFT 3. Zastosowanie analizy Fouriera 4. Przykłady programów Wprowadzenie teoretyczne Zespolona transformata Fouriera Jeżeli
Teoria sterowania - studia niestacjonarne AiR 2 stopień
 Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
uzyskany w wyniku próbkowania okresowego przebiegu czasowego x(t) ze stałym czasem próbkowania t takim, że T = t N 1 t
 ze stałym czasem próbkowania t takim, że T = t N 1 t") 4. 1 3. " P r ze c ie k " w idm ow y 1 0 2 4.13. "PRZECIEK" WIDMOWY Rozważmy szereg czasowy {x r } dla r = 0, 1,..., N 1 uzyskany w wyniku próbkowania okresowego przebiegu czasowego x(t) ze stałym czasem
4. 1 3. " P r ze c ie k " w idm ow y 1 0 2 4.13. "PRZECIEK" WIDMOWY Rozważmy szereg czasowy {x r } dla r = 0, 1,..., N 1 uzyskany w wyniku próbkowania okresowego przebiegu czasowego x(t) ze stałym czasem
Przetwarzanie sygnałów
 Przetwarzanie sygnałów Ćwiczenie 3 Filtry o skończonej odpowiedzi impulsowej (SOI) Spis treści 1 Filtracja cyfrowa podstawowe wiadomości 1 1.1 Właściwości filtru w dziedzinie czasu............... 1 1.2
Przetwarzanie sygnałów Ćwiczenie 3 Filtry o skończonej odpowiedzi impulsowej (SOI) Spis treści 1 Filtracja cyfrowa podstawowe wiadomości 1 1.1 Właściwości filtru w dziedzinie czasu............... 1 1.2
Przetwarzanie sygnałów
 Spis treści Przetwarzanie sygnałów Ćwiczenie 3 Właściwości przekształcenia Fouriera 1 Podstawowe właściwości przekształcenia Fouriera 1 1.1 Kompresja i ekspansja sygnału................... 2 1.2 Właściwości
Spis treści Przetwarzanie sygnałów Ćwiczenie 3 Właściwości przekształcenia Fouriera 1 Podstawowe właściwości przekształcenia Fouriera 1 1.1 Kompresja i ekspansja sygnału................... 2 1.2 Właściwości
Szereg i transformata Fouriera
 Analiza danych środowiskowych III rok OŚ Wykład 3 Andrzej Leśniak KGIS, GGiOŚ AGH Szereg i transformata Fouriera Cel wykładu: Wykrywanie i analiza okresowości w szeregach czasowych Przepływ wody w rzece
Analiza danych środowiskowych III rok OŚ Wykład 3 Andrzej Leśniak KGIS, GGiOŚ AGH Szereg i transformata Fouriera Cel wykładu: Wykrywanie i analiza okresowości w szeregach czasowych Przepływ wody w rzece
Ćwiczenie 4. Filtry o skończonej odpowiedzi impulsowej (SOI)
") Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 4. Filtry o skończonej odpowiedzi impulsowej (SOI) 1. Filtracja cyfrowa podstawowe
Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 4. Filtry o skończonej odpowiedzi impulsowej (SOI) 1. Filtracja cyfrowa podstawowe
b n y k n T s Filtr cyfrowy opisuje się również za pomocą splotu dyskretnego przedstawionego poniżej:
 1. FILTRY CYFROWE 1.1 DEFIICJA FILTRU W sytuacji, kiedy chcemy przekształcić dany sygnał, w inny sygnał niezawierający pewnych składowych np.: szumów mówi się wtedy o filtracji sygnału. Ogólnie Filtracją
1. FILTRY CYFROWE 1.1 DEFIICJA FILTRU W sytuacji, kiedy chcemy przekształcić dany sygnał, w inny sygnał niezawierający pewnych składowych np.: szumów mówi się wtedy o filtracji sygnału. Ogólnie Filtracją
Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L
 Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 3. Właściwości przekształcenia Fouriera 1. Podstawowe właściwości przekształcenia
Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 3. Właściwości przekształcenia Fouriera 1. Podstawowe właściwości przekształcenia
Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L
 Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 4. Filtry o skończonej odpowiedzi impulsowej (SOI) 1. Filtracja cyfrowa podstawowe
Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 4. Filtry o skończonej odpowiedzi impulsowej (SOI) 1. Filtracja cyfrowa podstawowe
CYFROWE PRZTWARZANIE SYGNAŁÓW (Zastosowanie transformacji Fouriera)
") I. Wprowadzenie do ćwiczenia CYFROWE PRZTWARZANIE SYGNAŁÓW (Zastosowanie transformacji Fouriera) Ogólnie termin przetwarzanie sygnałów odnosi się do nauki analizowania zmiennych w czasie procesów fizycznych.
I. Wprowadzenie do ćwiczenia CYFROWE PRZTWARZANIE SYGNAŁÓW (Zastosowanie transformacji Fouriera) Ogólnie termin przetwarzanie sygnałów odnosi się do nauki analizowania zmiennych w czasie procesów fizycznych.
Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L
 Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 4. Filtry o skończonej odpowiedzi impulsowej (SOI) 1. Filtracja cyfrowa podstawowe
Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 4. Filtry o skończonej odpowiedzi impulsowej (SOI) 1. Filtracja cyfrowa podstawowe
Właściwości sygnałów i splot. Krzysztof Patan
 Właściwości sygnałów i splot Krzysztof Patan Właściwości sygnałów Dla sygnału ciągłego x(t) można zdefiniować wielkości liczbowe charakteryzujące ten sygnał wartość średnia energia sygnału x sr = lim τ
Właściwości sygnałów i splot Krzysztof Patan Właściwości sygnałów Dla sygnału ciągłego x(t) można zdefiniować wielkości liczbowe charakteryzujące ten sygnał wartość średnia energia sygnału x sr = lim τ
Andrzej Leśnicki Laboratorium CPS Ćwiczenie 7 1/7 ĆWICZENIE 7. Splot liniowy i kołowy sygnałów
 Andrzej Leśnicki Laboratorium CPS Ćwiczenie 7 1/7 ĆWICZEIE 7 Splot liniowy i kołowy sygnałów 1. Cel ćwiczenia Operacja splotu jest jedną z najczęściej wykonywanych operacji na sygnale. Każde przejście
Andrzej Leśnicki Laboratorium CPS Ćwiczenie 7 1/7 ĆWICZEIE 7 Splot liniowy i kołowy sygnałów 1. Cel ćwiczenia Operacja splotu jest jedną z najczęściej wykonywanych operacji na sygnale. Każde przejście
Systemy. Krzysztof Patan
 Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
DYSKRETNE PRZEKSZTAŁCENIE FOURIERA C.D.
 CPS 6 DYSKRETE PRZEKSZTAŁCEIE FOURIERA C.D. Twierdzenie o przesunięciu Istnieje ważna właściwość DFT, znana jako twierdzenie o przesunięciu. Mówi ono, że: Przesunięcie w czasie okresowego ciągu wejściowego
CPS 6 DYSKRETE PRZEKSZTAŁCEIE FOURIERA C.D. Twierdzenie o przesunięciu Istnieje ważna właściwość DFT, znana jako twierdzenie o przesunięciu. Mówi ono, że: Przesunięcie w czasie okresowego ciągu wejściowego
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
TERAZ O SYGNAŁACH. Przebieg i widmo Zniekształcenia sygnałów okresowych Miary sygnałów Zasady cyfryzacji sygnałów analogowych
 TERAZ O SYGNAŁACH Przebieg i widmo Zniekształcenia sygnałów okresowych Miary sygnałów Zasady cyfryzacji sygnałów analogowych Sygnał sinusoidalny Sygnał sinusoidalny (także cosinusoidalny) należy do podstawowych
TERAZ O SYGNAŁACH Przebieg i widmo Zniekształcenia sygnałów okresowych Miary sygnałów Zasady cyfryzacji sygnałów analogowych Sygnał sinusoidalny Sygnał sinusoidalny (także cosinusoidalny) należy do podstawowych
Przetwarzanie sygnałów
 Przetwarzanie sygnałów Ćwiczenie 5 Filtry o nieskończonej odpowiedzi impulsowej (NOI) Spis treści 1 Wprowadzenie 1 1.1 Filtry jednobiegunowe....................... 1 1.2 Filtry wąskopasmowe........................
Przetwarzanie sygnałów Ćwiczenie 5 Filtry o nieskończonej odpowiedzi impulsowej (NOI) Spis treści 1 Wprowadzenie 1 1.1 Filtry jednobiegunowe....................... 1 1.2 Filtry wąskopasmowe........................
Plan wykładu. Własności statyczne i dynamiczne elementów automatyki:
 Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
PRZETWARZANIE SYGNAŁÓW
 PRZEWARZANIE SYGNAŁÓW SEMESR V Człowiek- nalepsza inwestyca Proekt współfinansowany przez Unię Europeską w ramach Europeskiego Funduszu Społecznego Wykład II Wprowadzenie Podstawy teoretyczne przetwarzania
PRZEWARZANIE SYGNAŁÓW SEMESR V Człowiek- nalepsza inwestyca Proekt współfinansowany przez Unię Europeską w ramach Europeskiego Funduszu Społecznego Wykład II Wprowadzenie Podstawy teoretyczne przetwarzania
Dyskretne przekształcenie Fouriera cz. 2
 Cyfrowe przetwarzanie sygnałów Jacek Rezmer -1- Dyskretne przekształcenie Fouriera cz. 2 Twierdzenie o przesunięciu Istnieje ważna właściwość DFT, znana jako twierdzenie o przesunięciu. Mówi ono, że: przesunięcie
Cyfrowe przetwarzanie sygnałów Jacek Rezmer -1- Dyskretne przekształcenie Fouriera cz. 2 Twierdzenie o przesunięciu Istnieje ważna właściwość DFT, znana jako twierdzenie o przesunięciu. Mówi ono, że: przesunięcie
Zjawisko aliasingu. Filtr antyaliasingowy. Przecieki widma - okna czasowe.
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Komputerowe wspomaganie eksperymentu Zjawisko aliasingu.. Przecieki widma - okna czasowe. dr inż. Roland PAWLICZEK Zjawisko aliasingu
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Komputerowe wspomaganie eksperymentu Zjawisko aliasingu.. Przecieki widma - okna czasowe. dr inż. Roland PAWLICZEK Zjawisko aliasingu
f = 2 śr MODULACJE
 5. MODULACJE 5.1. Wstęp Modulacja polega na odzwierciedleniu przebiegu sygnału oryginalnego przez zmianę jednego z parametrów fali nośnej. Przyczyny stosowania modulacji: 1. Umożliwienie wydajnego wypromieniowania
5. MODULACJE 5.1. Wstęp Modulacja polega na odzwierciedleniu przebiegu sygnału oryginalnego przez zmianę jednego z parametrów fali nośnej. Przyczyny stosowania modulacji: 1. Umożliwienie wydajnego wypromieniowania
Rozdział 1 PODSTAWOWE POJĘCIA I DEFINICJE
 1. 1. W p r owadze n ie 1 Rozdział 1 PODSTAWOWE POJĘCIA I DEFINICJE 1.1. WPROWADZENIE SYGNAŁ nośnik informacji ANALIZA SYGNAŁU badanie, którego celem jest identyfikacja własności, cech, miar sygnału; odtwarzanie
1. 1. W p r owadze n ie 1 Rozdział 1 PODSTAWOWE POJĘCIA I DEFINICJE 1.1. WPROWADZENIE SYGNAŁ nośnik informacji ANALIZA SYGNAŁU badanie, którego celem jest identyfikacja własności, cech, miar sygnału; odtwarzanie
(1.1) gdzie: - f = f 2 f 1 - bezwzględna szerokość pasma, f śr = (f 2 + f 1 )/2 częstotliwość środkowa.
 gdzie: - f = f 2 f 1 - bezwzględna szerokość pasma, f śr = (f 2 + f 1 )/2 częstotliwość środkowa.") MODULACJE ANALOGOWE 1. Wstęp Do przesyłania sygnału drogą radiową stosuje się modulację. Modulacja polega na odzwierciedleniu przebiegu sygnału oryginalnego przez zmianę jednego z parametrów fali nośnej.
MODULACJE ANALOGOWE 1. Wstęp Do przesyłania sygnału drogą radiową stosuje się modulację. Modulacja polega na odzwierciedleniu przebiegu sygnału oryginalnego przez zmianę jednego z parametrów fali nośnej.
Technika audio część 2
 Technika audio część 2 Wykład 12 Projektowanie cyfrowych układów elektronicznych Mgr inż. Łukasz Kirchner lukasz.kirchner@cs.put.poznan.pl http://www.cs.put.poznan.pl/lkirchner Wprowadzenie do filtracji
Technika audio część 2 Wykład 12 Projektowanie cyfrowych układów elektronicznych Mgr inż. Łukasz Kirchner lukasz.kirchner@cs.put.poznan.pl http://www.cs.put.poznan.pl/lkirchner Wprowadzenie do filtracji
PODSTAWY I ALGORYTMY PRZETWARZANIA SYGNAŁÓW PROGRAM WYKŁADÓW PROGRAM WYKŁADÓW PROGRAM WYKŁADÓW
 PODSTAWY I ALGORYTMY PRZETWARZANIA SYGNAŁÓW Kierunek: Elektronika i Telekomunikacja sem. IV Prowadzący: dr inż. ARKADIUSZ ŁUKJANIUK PROGRAM WYKŁADÓW Pojęcie sygnału, sygnał a informacja, klasyfikacja sygnałów,
PODSTAWY I ALGORYTMY PRZETWARZANIA SYGNAŁÓW Kierunek: Elektronika i Telekomunikacja sem. IV Prowadzący: dr inż. ARKADIUSZ ŁUKJANIUK PROGRAM WYKŁADÓW Pojęcie sygnału, sygnał a informacja, klasyfikacja sygnałów,
Podstawy Przetwarzania Sygnałów
 Adam Szulc 188250 grupa: pon TN 17:05 Podstawy Przetwarzania Sygnałów Sprawozdanie 6: Filtracja sygnałów. Filtry FIT o skończonej odpowiedzi impulsowej. 1. Cel ćwiczenia. 1) Przeprowadzenie filtracji trzech
Adam Szulc 188250 grupa: pon TN 17:05 Podstawy Przetwarzania Sygnałów Sprawozdanie 6: Filtracja sygnałów. Filtry FIT o skończonej odpowiedzi impulsowej. 1. Cel ćwiczenia. 1) Przeprowadzenie filtracji trzech
Teoria sygnałów Signal Theory. Elektrotechnika I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") . KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Teoria sygnałów Signal Theory A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Teoria sygnałów Signal Theory A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
Generowanie sygnałów na DSP
 Zastosowania Procesorów Sygnałowych dr inż. Grzegorz Szwoch greg@multimed.org p. 732 - Katedra Systemów Multimedialnych Generowanie sygnałów na DSP Wstęp Dziś w programie: generowanie sygnałów za pomocą
Zastosowania Procesorów Sygnałowych dr inż. Grzegorz Szwoch greg@multimed.org p. 732 - Katedra Systemów Multimedialnych Generowanie sygnałów na DSP Wstęp Dziś w programie: generowanie sygnałów za pomocą
FFT i dyskretny splot. Aplikacje w DSP
 i dyskretny splot. Aplikacje w DSP Marcin Jenczmyk m.jenczmyk@knm.katowice.pl Wydział Matematyki, Fizyki i Chemii 10 maja 2014 M. Jenczmyk Sesja wiosenna KNM 2014 i dyskretny splot 1 / 17 Transformata
i dyskretny splot. Aplikacje w DSP Marcin Jenczmyk m.jenczmyk@knm.katowice.pl Wydział Matematyki, Fizyki i Chemii 10 maja 2014 M. Jenczmyk Sesja wiosenna KNM 2014 i dyskretny splot 1 / 17 Transformata
EFEKTYWNE UŻYTKOWANIE ENERGII ELEKTRYCZNEJ
 Studia Podyplomowe EFEKTYWNE UŻYTKOWANIE ENERGII ELEKTRYCZNEJ w ramach projektu Śląsko-Małopolskie Centrum Kompetencji Zarządzania Energią Pomiar parametrów sygnałów sieci elektroenergetycznej dr inż.
Studia Podyplomowe EFEKTYWNE UŻYTKOWANIE ENERGII ELEKTRYCZNEJ w ramach projektu Śląsko-Małopolskie Centrum Kompetencji Zarządzania Energią Pomiar parametrów sygnałów sieci elektroenergetycznej dr inż.
ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów
 ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów. Cel ćwiczenia Badanie układów pierwszego rzędu różniczkującego, całkującego
ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów. Cel ćwiczenia Badanie układów pierwszego rzędu różniczkującego, całkującego
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
Część 1. Transmitancje i stabilność
 Część 1 Transmitancje i stabilność Zastosowanie opisu transmitancyjnego w projektowaniu przekształtników impulsowych Istotne jest przewidzenie wpływu zmian w warunkach pracy (m. in. v g, i) i wielkości
Część 1 Transmitancje i stabilność Zastosowanie opisu transmitancyjnego w projektowaniu przekształtników impulsowych Istotne jest przewidzenie wpływu zmian w warunkach pracy (m. in. v g, i) i wielkości
Kompresja Danych. Streszczenie Studia Dzienne Wykład 13, f(t) = c n e inω0t, T f(t)e inω 0t dt.
 = c n e inω0t, T f(t)e inω 0t dt.") 1 Kodowanie podpasmowe Kompresja Danych Streszczenie Studia Dzienne Wykład 13, 18.05.2006 1.1 Transformaty, próbkowanie i filtry Korzystamy z faktów: Każdą funkcję okresową można reprezentować w postaci
1 Kodowanie podpasmowe Kompresja Danych Streszczenie Studia Dzienne Wykład 13, 18.05.2006 1.1 Transformaty, próbkowanie i filtry Korzystamy z faktów: Każdą funkcję okresową można reprezentować w postaci
Teoria przetwarzania A/C i C/A.
 Teoria przetwarzania A/C i C/A. Autor: Bartłomiej Gorczyński Cyfrowe metody przetwarzania sygnałów polegają na przetworzeniu badanego sygnału analogowego w sygnał cyfrowy reprezentowany ciągiem słów binarnych
Teoria przetwarzania A/C i C/A. Autor: Bartłomiej Gorczyński Cyfrowe metody przetwarzania sygnałów polegają na przetworzeniu badanego sygnału analogowego w sygnał cyfrowy reprezentowany ciągiem słów binarnych
) (2) 1. A i. t+β i. sin(ω i
 (2) 1. A i. t+β i. sin(ω i") Ćwiczenie 8 AALIZA HARMOICZA PRZEBIEGÓW DRGAŃ 1. Cel ćwiczenia Analiza przebiegów drgań maszyny i wyznaczenie składowych harmonicznych tych przebiegów,. Wprowadzenie.1. Sygnały pomiarowe W celu przeprowadzenia
Ćwiczenie 8 AALIZA HARMOICZA PRZEBIEGÓW DRGAŃ 1. Cel ćwiczenia Analiza przebiegów drgań maszyny i wyznaczenie składowych harmonicznych tych przebiegów,. Wprowadzenie.1. Sygnały pomiarowe W celu przeprowadzenia
Teoria systemów i sygnałów Kierunek AiR, sem. 5 2wE + 1l
 Teoria systemów i sygnałów Kierunek AiR, sem. 5 2wE + 1l Prof. dr hab. Wojciech Moczulski Politechnika Ślaska, Wydział Mechaniczny Technologiczny Katedra Podstaw Konstrukcji Maszyn 19 października 2008
Teoria systemów i sygnałów Kierunek AiR, sem. 5 2wE + 1l Prof. dr hab. Wojciech Moczulski Politechnika Ślaska, Wydział Mechaniczny Technologiczny Katedra Podstaw Konstrukcji Maszyn 19 października 2008
ANALIZA SYGNAŁÓ W JEDNÓWYMIARÓWYCH
 ANALIZA SYGNAŁÓ W JEDNÓWYMIARÓWYCH Generowanie podstawowych przebiegów okresowych sawtooth() przebieg trójkątny (wierzhołki +/-1, okres 2 ) square() przebieg kwadratowy (okres 2 ) gauspuls()przebieg sinusoidalny
ANALIZA SYGNAŁÓ W JEDNÓWYMIARÓWYCH Generowanie podstawowych przebiegów okresowych sawtooth() przebieg trójkątny (wierzhołki +/-1, okres 2 ) square() przebieg kwadratowy (okres 2 ) gauspuls()przebieg sinusoidalny
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
W celu obliczenia charakterystyki częstotliwościowej zastosujemy wzór 1. charakterystyka amplitudowa 0,
 Bierne obwody RC. Filtr dolnoprzepustowy. Filtr dolnoprzepustowy jest układem przenoszącym sygnały o małej częstotliwości bez zmian, a powodującym tłumienie i opóźnienie fazy sygnałów o większych częstotliwościach.
Bierne obwody RC. Filtr dolnoprzepustowy. Filtr dolnoprzepustowy jest układem przenoszącym sygnały o małej częstotliwości bez zmian, a powodującym tłumienie i opóźnienie fazy sygnałów o większych częstotliwościach.
CYFROWE PRZETWARZANIE SYGNAŁÓW
 Cyfrowe przetwarzanie sygnałów -1-2003 CYFROWE PRZETWARZANIE SYGNAŁÓW tematy wykładowe: ( 28 godz. +2godz. kolokwium, test?) 1. Sygnały i systemy dyskretne (LTI, SLS) 1.1. Systemy LTI ( SLS ) (definicje
Cyfrowe przetwarzanie sygnałów -1-2003 CYFROWE PRZETWARZANIE SYGNAŁÓW tematy wykładowe: ( 28 godz. +2godz. kolokwium, test?) 1. Sygnały i systemy dyskretne (LTI, SLS) 1.1. Systemy LTI ( SLS ) (definicje
Stabilność. Krzysztof Patan
 Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Transformata Fouriera i analiza spektralna
 Transformata Fouriera i analiza spektralna Z czego składają się sygnały? Sygnały jednowymiarowe, częstotliwość Liczby zespolone Transformata Fouriera Szybka Transformata Fouriera (FFT) FFT w 2D Przykłady
Transformata Fouriera i analiza spektralna Z czego składają się sygnały? Sygnały jednowymiarowe, częstotliwość Liczby zespolone Transformata Fouriera Szybka Transformata Fouriera (FFT) FFT w 2D Przykłady
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Przetwarzanie sygnałów dyskretnych
 Przetwarzanie sygnałów dyskretnych System dyskretny p[ n ] r[ n] Przykłady: [ ] = [ ] + [ ] r n a p n a p n [ ] r n = 2 [ + ] + p[ n ] p n 2 r[ n] = a p[ n] + b n [ ] = [ ] r n a p n n [ ] = [ + ] r n
Przetwarzanie sygnałów dyskretnych System dyskretny p[ n ] r[ n] Przykłady: [ ] = [ ] + [ ] r n a p n a p n [ ] r n = 2 [ + ] + p[ n ] p n 2 r[ n] = a p[ n] + b n [ ] = [ ] r n a p n n [ ] = [ + ] r n
Ćwiczenie - 1 OBSŁUGA GENERATORA I OSCYLOSKOPU. WYZNACZANIE CHARAKTERYSTYKI AMPLITUDOWEJ I FAZOWEJ NA PRZYKŁADZIE FILTRU RC.
 Ćwiczenie - 1 OBSŁUGA GENERATORA I OSCYLOSKOPU. WYZNACZANIE CHARAKTERYSTYKI AMPLITUDOWEJ I FAZOWEJ NA PRZYKŁADZIE FILTRU RC. Spis treści 1 Cel ćwiczenia 2 2 Podstawy teoretyczne 2 2.1 Charakterystyki częstotliwościowe..........................
Ćwiczenie - 1 OBSŁUGA GENERATORA I OSCYLOSKOPU. WYZNACZANIE CHARAKTERYSTYKI AMPLITUDOWEJ I FAZOWEJ NA PRZYKŁADZIE FILTRU RC. Spis treści 1 Cel ćwiczenia 2 2 Podstawy teoretyczne 2 2.1 Charakterystyki częstotliwościowe..........................
dr inż. Artur Zieliński Katedra Elektrochemii, Korozji i Inżynierii Materiałowej Wydział Chemiczny PG pokój 311
 dr inż. Artur Zieliński Katedra Elektrochemii, Korozji i Inżynierii Materiałowej Wydział Chemiczny PG pokój 311 Politechnika Gdaoska, 2011 r. Publikacja współfinansowana ze środków Unii Europejskiej w
dr inż. Artur Zieliński Katedra Elektrochemii, Korozji i Inżynierii Materiałowej Wydział Chemiczny PG pokój 311 Politechnika Gdaoska, 2011 r. Publikacja współfinansowana ze środków Unii Europejskiej w
Andrzej Leśnicki Laboratorium CPS Ćwiczenie 6 1/8 ĆWICZENIE 6. Dyskretne przekształcenie Fouriera DFT
 Andrzej Leśnicki Laboratorium CPS Ćwiczenie 6 1/8 ĆWICZEIE 6 Dyskretne przekształcenie Fouriera DFT 1. Cel ćwiczenia Dyskretne przekształcenie Fouriera ( w skrócie oznaczane jako DFT z ang. Discrete Fourier
Andrzej Leśnicki Laboratorium CPS Ćwiczenie 6 1/8 ĆWICZEIE 6 Dyskretne przekształcenie Fouriera DFT 1. Cel ćwiczenia Dyskretne przekształcenie Fouriera ( w skrócie oznaczane jako DFT z ang. Discrete Fourier
DYSKRETNA TRANSFORMACJA FOURIERA
 Laboratorium Teorii Sygnałów - DFT 1 DYSKRETNA TRANSFORMACJA FOURIERA Cel ćwiczenia Celem ćwiczenia jest przeprowadzenie analizy widmowej sygnałów okresowych za pomocą szybkiego przekształcenie Fouriera
Laboratorium Teorii Sygnałów - DFT 1 DYSKRETNA TRANSFORMACJA FOURIERA Cel ćwiczenia Celem ćwiczenia jest przeprowadzenie analizy widmowej sygnałów okresowych za pomocą szybkiego przekształcenie Fouriera
Cyfrowe przetwarzanie sygnałów w urządzeniach EAZ firmy Computers & Control
 Cyfrowe przetwarzanie sygnałów w urządzeniach EAZ firmy Computers & Control 1. Wstęp 2.Próbkowanie i odtwarzanie sygnałów 3. Charakterystyka sygnałów analogowych 4. Aliasing 5. Filtry antyaliasingowe 6.
Cyfrowe przetwarzanie sygnałów w urządzeniach EAZ firmy Computers & Control 1. Wstęp 2.Próbkowanie i odtwarzanie sygnałów 3. Charakterystyka sygnałów analogowych 4. Aliasing 5. Filtry antyaliasingowe 6.
10. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego
 102 10. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego Cele ćwiczenia Badanie właściwości pętli fazowej. Badanie układu Costasa do odtwarzania nośnej sygnału AM-SC. Badanie układu Costasa
102 10. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego Cele ćwiczenia Badanie właściwości pętli fazowej. Badanie układu Costasa do odtwarzania nośnej sygnału AM-SC. Badanie układu Costasa
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
6. Transmisja i generacja sygnałów okresowych
 24 6. Transmisja i generacja sygnałów okresowych Cele ćwiczenia Zapoznanie ze środowiskiem programistycznym Code Composer Studio. Zapoznanie z urządzeniem TMX320C5515 ezdsp. Zapoznanie z podstawami programowania
24 6. Transmisja i generacja sygnałów okresowych Cele ćwiczenia Zapoznanie ze środowiskiem programistycznym Code Composer Studio. Zapoznanie z urządzeniem TMX320C5515 ezdsp. Zapoznanie z podstawami programowania
8. Analiza widmowa metodą szybkiej transformaty Fouriera (FFT)
") 8. Analiza widmowa metodą szybkiej transformaty Fouriera (FFT) Ćwiczenie polega na wykonaniu analizy widmowej zadanych sygnałów metodą FFT, a następnie określeniu amplitud i częstotliwości głównych składowych
8. Analiza widmowa metodą szybkiej transformaty Fouriera (FFT) Ćwiczenie polega na wykonaniu analizy widmowej zadanych sygnałów metodą FFT, a następnie określeniu amplitud i częstotliwości głównych składowych
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transform
 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
1. Liczby zespolone. Jacek Jędrzejewski 2011/2012
 1. Liczby zespolone Jacek Jędrzejewski 2011/2012 Spis treści 1 Liczby zespolone 2 1.1 Definicja liczby zespolonej.................... 2 1.2 Postać kanoniczna liczby zespolonej............... 1. Postać
1. Liczby zespolone Jacek Jędrzejewski 2011/2012 Spis treści 1 Liczby zespolone 2 1.1 Definicja liczby zespolonej.................... 2 1.2 Postać kanoniczna liczby zespolonej............... 1. Postać
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Transmitancje i charakterystyki częstotliwościowe. Krzysztof Patan
 Transmitancje i charakterystyki częstotliwościowe Krzysztof Patan Transmitancja systemu czasu ciągłego Przekształcenie Laplace a systemu czasu ciągłego jest superpozycją składowych pochodzących od wymuszenia
Transmitancje i charakterystyki częstotliwościowe Krzysztof Patan Transmitancja systemu czasu ciągłego Przekształcenie Laplace a systemu czasu ciągłego jest superpozycją składowych pochodzących od wymuszenia
Ćwiczenie 6 Projektowanie filtrów cyfrowych o skończonej i nieskończonej odpowiedzi impulsowej
 Ćwiczenie 6 Projektowanie filtrów cyfrowych o skończonej i nieskończonej odpowiedzi impulsowej. Filtry FIR o skończonej odpowiedzi impulsowej (SOI) Filtracja FIR polega na tym, że sygnał wyjściowy powstaje
Ćwiczenie 6 Projektowanie filtrów cyfrowych o skończonej i nieskończonej odpowiedzi impulsowej. Filtry FIR o skończonej odpowiedzi impulsowej (SOI) Filtracja FIR polega na tym, że sygnał wyjściowy powstaje
Przetwarzanie sygnałów z czasem ciągłym
 Przetwarzanie sygnałów z czasem ciągłym Model systemowy układu p( t ) r ( t) wejście Układ wyjście p( t ) pobudzenie r ( t) reakcja Układ wykonuje pewną operację { i } na sygnale wejściowym p t (pobudzeniu),
Przetwarzanie sygnałów z czasem ciągłym Model systemowy układu p( t ) r ( t) wejście Układ wyjście p( t ) pobudzenie r ( t) reakcja Układ wykonuje pewną operację { i } na sygnale wejściowym p t (pobudzeniu),
Wprowadzenie. Spis treści. Analiza_sygnałów_-_ćwiczenia/Filtry
 Analiza_sygnałów_-_ćwiczenia/Filtry Spis treści 1 Wprowadzenie 2 Filtry cyfrowe: powtórka z wykładu 2.1 Działanie filtra w dziedzinie czasu 2.2 Nazewnictwo 2.3 Przejście do dziedziny częstości 2.3.1 Działanie
Analiza_sygnałów_-_ćwiczenia/Filtry Spis treści 1 Wprowadzenie 2 Filtry cyfrowe: powtórka z wykładu 2.1 Działanie filtra w dziedzinie czasu 2.2 Nazewnictwo 2.3 Przejście do dziedziny częstości 2.3.1 Działanie
Egzamin / zaliczenie na ocenę*
 WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI Zał. nr 4 do ZW 33/01 KARTA PRZEDMIOTU Nazwa w języku polskim CYFROWE PRZETWARZANIE SYGNAŁÓW Nazwa w języku angielskim DIGITAL SIGNAL PROCESSING Kierunek studiów
WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI Zał. nr 4 do ZW 33/01 KARTA PRZEDMIOTU Nazwa w języku polskim CYFROWE PRZETWARZANIE SYGNAŁÓW Nazwa w języku angielskim DIGITAL SIGNAL PROCESSING Kierunek studiów
Podstawy akwizycji i cyfrowego przetwarzania sygnałów
 AKADEMIA GÓRNICZO - HUTNICZA IM. STANISŁAWA STASZICA w KRAKOWIE WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI, INFORMATYKI i ELEKTRONIKI KATEDRA METROLOGII LABORATORIUM METROLOGII Podstawy akwizycji i cyfrowego
AKADEMIA GÓRNICZO - HUTNICZA IM. STANISŁAWA STASZICA w KRAKOWIE WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI, INFORMATYKI i ELEKTRONIKI KATEDRA METROLOGII LABORATORIUM METROLOGII Podstawy akwizycji i cyfrowego
MODULACJA. Definicje podstawowe, cel i przyczyny stosowania modulacji, rodzaje modulacji. dr inż. Janusz Dudczyk
 Wyższa Szkoła Informatyki Stosowanej i Zarządzania MODULACJA Definicje podstawowe, cel i przyczyny stosowania modulacji, rodzaje modulacji dr inż. Janusz Dudczyk Cel wykładu Przedstawienie podstawowych
Wyższa Szkoła Informatyki Stosowanej i Zarządzania MODULACJA Definicje podstawowe, cel i przyczyny stosowania modulacji, rodzaje modulacji dr inż. Janusz Dudczyk Cel wykładu Przedstawienie podstawowych
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Część 2 Analiza obwodów w stanie ustalonym przy wymuszeniu sinusoidalnym Przypomnienie ostatniego wykładu Prąd i napięcie Podstawowe
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Część 2 Analiza obwodów w stanie ustalonym przy wymuszeniu sinusoidalnym Przypomnienie ostatniego wykładu Prąd i napięcie Podstawowe
Analiza szeregów czasowych: 2. Splot. Widmo mocy.
 Analiza szeregów czasowych: 2. Splot. Widmo mocy. P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ semestr letni 2007/08 Splot Jedna z najważniejszych własności transformaty Fouriera jest to, że transformata
Analiza szeregów czasowych: 2. Splot. Widmo mocy. P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ semestr letni 2007/08 Splot Jedna z najważniejszych własności transformaty Fouriera jest to, że transformata
AiR_TSiS_1/2 Teoria sygnałów i systemów Signals and systems theory. Automatyka i Robotyka I stopień ogólnoakademicki
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
8. Realizacja projektowanie i pomiary filtrów IIR
 53 8. Realizacja projektowanie i pomiary filtrów IIR Cele ćwiczenia Realizacja na zestawie TMX320C5515 ezdsp prostych liniowych filtrów cyfrowych. Pomiary charakterystyk amplitudowych zrealizowanych filtrów
53 8. Realizacja projektowanie i pomiary filtrów IIR Cele ćwiczenia Realizacja na zestawie TMX320C5515 ezdsp prostych liniowych filtrów cyfrowych. Pomiary charakterystyk amplitudowych zrealizowanych filtrów
dr inż. Artur Zieliński Katedra Elektrochemii, Korozji i Inżynierii Materiałowej Wydział Chemiczny PG pokój 311
 dr inż. Artur Zieliński Katedra Elektrochemii, Korozji i Inżynierii Materiałowej Wydział Chemiczny PG pokój 3 Politechnika Gdaoska, 20 r. Publikacja współfinansowana ze środków Unii Europejskiej w ramach
dr inż. Artur Zieliński Katedra Elektrochemii, Korozji i Inżynierii Materiałowej Wydział Chemiczny PG pokój 3 Politechnika Gdaoska, 20 r. Publikacja współfinansowana ze środków Unii Europejskiej w ramach
Przeksztacenie Laplace a. Krzysztof Patan
 Przeksztacenie Laplace a Krzysztof Patan Wprowadzenie Transformata Fouriera popularna metoda opisu systemów w dziedzinie częstotliwości Transformata Fouriera umożliwia wykonanie wielu użytecznych czynności:
Przeksztacenie Laplace a Krzysztof Patan Wprowadzenie Transformata Fouriera popularna metoda opisu systemów w dziedzinie częstotliwości Transformata Fouriera umożliwia wykonanie wielu użytecznych czynności:
Opis matematyczny. Równanie modulatora. Charakterystyka statyczna. Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy. dla 0 v c.
 Opis matematyczny Równanie modulatora Charakterystyka statyczna d t = v c t V M dla 0 v c t V M D 1 V M V c Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy v c (t )=V c + v c (t ) d (t
Opis matematyczny Równanie modulatora Charakterystyka statyczna d t = v c t V M dla 0 v c t V M D 1 V M V c Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy v c (t )=V c + v c (t ) d (t
SPRZĘTOWA REALIZACJA FILTRÓW CYFROWYCH TYPU SOI
 1 ĆWICZENIE VI SPRZĘTOWA REALIZACJA FILTRÓW CYFROWYCH TYPU SOI (00) Celem pracy jest poznanie sposobu fizycznej realizacji filtrów cyfrowych na procesorze sygnałowym firmy Texas Instruments TMS320C6711
1 ĆWICZENIE VI SPRZĘTOWA REALIZACJA FILTRÓW CYFROWYCH TYPU SOI (00) Celem pracy jest poznanie sposobu fizycznej realizacji filtrów cyfrowych na procesorze sygnałowym firmy Texas Instruments TMS320C6711
METODY ANALIZY SYGNAŁÓW WIBROAKUSTYCZNYCH
 INSTYTUT KONSTRUKCJI MASZYN LABORATORIUM METODY ANALIZY SYGNAŁÓW WIBROAKUSTYCZNYCH Methods of analyzing vibro-acoustics signal Zakres ćwiczenia: 1. Rodzaje sygnałów. 2. Metody analizy sygnałów w dziedzinie
INSTYTUT KONSTRUKCJI MASZYN LABORATORIUM METODY ANALIZY SYGNAŁÓW WIBROAKUSTYCZNYCH Methods of analyzing vibro-acoustics signal Zakres ćwiczenia: 1. Rodzaje sygnałów. 2. Metody analizy sygnałów w dziedzinie
LABORATORIUM METROLOGII. Podstawy akwizycji i cyfrowego przetwarzania sygnałów. dr inż. Andrzej Skalski. mgr inż. Mirosław Socha
 AKADEMIA GÓRNICZO - HUTNICZA IM. STANISŁAWA STASZICA w KRAKOWIE WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI, INFORMATYKI i ELEKTRONIKI KATEDRA METROLOGII LABORATORIUM METROLOGII Podstawy akwizycji i cyfrowego
AKADEMIA GÓRNICZO - HUTNICZA IM. STANISŁAWA STASZICA w KRAKOWIE WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI, INFORMATYKI i ELEKTRONIKI KATEDRA METROLOGII LABORATORIUM METROLOGII Podstawy akwizycji i cyfrowego
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 3 BADANIE CHARAKTERYSTYK CZASOWYCH LINIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia są pomiary i analiza
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 3 BADANIE CHARAKTERYSTYK CZASOWYCH LINIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia są pomiary i analiza
A-2. Filtry bierne. wersja
 wersja 04 2014 1. Zakres ćwiczenia Celem ćwiczenia jest zrozumienie propagacji sygnałów zmiennych w czasie przez układy filtracji oparte na elementach rezystancyjno-pojemnościowych. Wyznaczenie doświadczalne
wersja 04 2014 1. Zakres ćwiczenia Celem ćwiczenia jest zrozumienie propagacji sygnałów zmiennych w czasie przez układy filtracji oparte na elementach rezystancyjno-pojemnościowych. Wyznaczenie doświadczalne
ELEKTRONIKA W EKSPERYMENCIE FIZYCZNYM
 ELEKTRONIKA W EKSPERYMENCIE FIZYCZNYM D. B. Tefelski Zakład VI Badań Wysokociśnieniowych Wydział Fizyki Politechnika Warszawska, Koszykowa 75, 00-662 Warszawa, PL 28 lutego 2011 Stany nieustalone, stabilność
ELEKTRONIKA W EKSPERYMENCIE FIZYCZNYM D. B. Tefelski Zakład VI Badań Wysokociśnieniowych Wydział Fizyki Politechnika Warszawska, Koszykowa 75, 00-662 Warszawa, PL 28 lutego 2011 Stany nieustalone, stabilność
Przetwarzanie sygnałów biomedycznych
 Przetwarzanie sygnałów biomedycznych dr hab. inż. Krzysztof Kałużyński, prof. PW Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Przetwarzanie sygnałów biomedycznych dr hab. inż. Krzysztof Kałużyński, prof. PW Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
STUDIA MAGISTERSKIE DZIENNE LABORATORIUM SYGNAŁÓW, SYSTEMÓW I MODULACJI. Filtracja cyfrowa. v.1.0
 Politechnika Warszawska Instytut Radioelektroniki Zakład Radiokomunikacji SUDIA MAGISERSKIE DZIENNE LABORAORIUM SYGNAŁÓW, SYSEMÓW I MODULACJI Filtracja cyfrowa v.1. Opracowanie: dr inż. Wojciech Kazubski,
Politechnika Warszawska Instytut Radioelektroniki Zakład Radiokomunikacji SUDIA MAGISERSKIE DZIENNE LABORAORIUM SYGNAŁÓW, SYSEMÓW I MODULACJI Filtracja cyfrowa v.1. Opracowanie: dr inż. Wojciech Kazubski,
Podstawowe funkcje przetwornika C/A
 ELEKTRONIKA CYFROWA PRZETWORNIKI CYFROWO-ANALOGOWE I ANALOGOWO-CYFROWE Literatura: 1. Rudy van de Plassche: Scalone przetworniki analogowo-cyfrowe i cyfrowo-analogowe, WKŁ 1997 2. Marian Łakomy, Jan Zabrodzki:
ELEKTRONIKA CYFROWA PRZETWORNIKI CYFROWO-ANALOGOWE I ANALOGOWO-CYFROWE Literatura: 1. Rudy van de Plassche: Scalone przetworniki analogowo-cyfrowe i cyfrowo-analogowe, WKŁ 1997 2. Marian Łakomy, Jan Zabrodzki:
12. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego
 94 12. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego Cele ćwiczenia Badanie właściwości pętli fazowej. Badanie układu Costasa do odtwarzania nośnej sygnału AM-SC. Badanie układu Costasa
94 12. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego Cele ćwiczenia Badanie właściwości pętli fazowej. Badanie układu Costasa do odtwarzania nośnej sygnału AM-SC. Badanie układu Costasa
Przetwarzanie i transmisja danych multimedialnych. Wykład 8 Transformaty i kodowanie cz. 2. Przemysław Sękalski.
 Przetwarzanie i transmisja danych multimedialnych Wykład 8 Transformaty i kodowanie cz. 2 Przemysław Sękalski sekalski@dmcs.pl Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych DMCS
Przetwarzanie i transmisja danych multimedialnych Wykład 8 Transformaty i kodowanie cz. 2 Przemysław Sękalski sekalski@dmcs.pl Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych DMCS
Ćwiczenie 3,4. Analiza widmowa sygnałów czasowych: sinus, trójkąt, prostokąt, szum biały i szum różowy
 Ćwiczenie 3,4. Analiza widmowa sygnałów czasowych: sinus, trójkąt, prostokąt, szum biały i szum różowy Grupa: wtorek 18:3 Tomasz Niedziela I. CZĘŚĆ ĆWICZENIA 1. Cel i przebieg ćwiczenia. Celem ćwiczenia
Ćwiczenie 3,4. Analiza widmowa sygnałów czasowych: sinus, trójkąt, prostokąt, szum biały i szum różowy Grupa: wtorek 18:3 Tomasz Niedziela I. CZĘŚĆ ĆWICZENIA 1. Cel i przebieg ćwiczenia. Celem ćwiczenia
O sygnałach cyfrowych
 O sygnałach cyfrowych Informacja Informacja - wielkość abstrakcyjna, która moŝe być: przechowywana w pewnych obiektach przesyłana pomiędzy pewnymi obiektami przetwarzana w pewnych obiektach stosowana do
O sygnałach cyfrowych Informacja Informacja - wielkość abstrakcyjna, która moŝe być: przechowywana w pewnych obiektach przesyłana pomiędzy pewnymi obiektami przetwarzana w pewnych obiektach stosowana do
Opis efektów kształcenia dla modułu zajęć
 Nazwa modułu: Teoria i przetwarzanie sygnałów Rok akademicki: 2013/2014 Kod: EEL-1-524-s Punkty ECTS: 6 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika
Nazwa modułu: Teoria i przetwarzanie sygnałów Rok akademicki: 2013/2014 Kod: EEL-1-524-s Punkty ECTS: 6 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika
Analiza szeregów czasowych: 2. Splot. Widmo mocy.
 Analiza szeregów czasowych: 2. Splot. Widmo mocy. P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ semestr letni 2006/07 Splot Jedna z najważniejszych własności transformaty Fouriera jest to, że transformata
Analiza szeregów czasowych: 2. Splot. Widmo mocy. P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ semestr letni 2006/07 Splot Jedna z najważniejszych własności transformaty Fouriera jest to, że transformata
CZWÓRNIKI KLASYFIKACJA CZWÓRNIKÓW.
 CZWÓRNK jest to obwód elektryczny o dowolnej wewnętrznej strukturze połączeń elementów, mający wyprowadzone na zewnątrz cztery zaciski uporządkowane w dwie pary, zwane bramami : wejściową i wyjściową,
CZWÓRNK jest to obwód elektryczny o dowolnej wewnętrznej strukturze połączeń elementów, mający wyprowadzone na zewnątrz cztery zaciski uporządkowane w dwie pary, zwane bramami : wejściową i wyjściową,