Graficzne modelowanie scen 3D. POV-Ray. Wykład 3
|
|
|
- Natalia Kozłowska
- 9 lat temu
- Przeglądów:
Transkrypt
1 POV-Ray Wykład 3
2 Krzywa Beziera Krzywa Beziera to krzywa wielomianowa trzeciego stopnia, czyli taka która może być definiowana za pomocą trzech wielomianów z pewnym parametrem t (odpowiednio dla współrzędnych x, y i z). Wielomiany trzeciego stopnia są używane najczęściej, ponieważ wielomiany niższego stopnia są zbyt mało elastyczne, jeśli chodzi o sterowanie kształtem krzywej. Natomiast wielomiany wyższego stopnia wprowadzają niepożądane oscylacje, a ponadto wymagają większej liczby obliczeń. Krzywe trzeciego stopnia są również krzywymi najniższego stopnia, które nie leżą w jednej płaszczyźnie w 3D. Współczynniki wielomianów są tak dobierane, żeby krzywa przebiegała wzdłuż pożądanej ścieżki. Krzywa te została niezależnie opracowane przez Pierre'a Beziera i Paul de Faget de Casteljau, na potrzeby firm Renault i Citroën (z myślą o wykorzystaniu przy projektowaniu samochodów). Krzywa określona jest przez dwa punkty końcowe oraz dwa punkty pośrednie nie należące do krzywej. Krzywa Beziera interpoluje więc oba końcowe punkty i aproksymuje dwa pozostałe. Dzięki swoim zaletom, takim jak łatwość interakcyjnego kształtowania i istnienie sprawnych algorytmów przetwarzania, reprezentacje te obecnie używane powszechnie nie tylko w inżynierskich systemach projektowania wspomaganego komputerem, ale także w wielu innych zastosowaniach graficznych (np. w projektowaniu czcionek).

3 Punkty należące do krzywej Beziera obliczane są z równań: P. x = (1 t) 3 P 1. x + 3(1 t) 2 tp 2. x + 3(1 t)t 2 P 3. x + t 3 P 4. x P. y = (1 t) 3 P 1. y + 3(1 t) 2 tp 2. y + 3(1 t)t 2 P 3. y + t 3 P 4. y P. z = (1 t) 3 P 1. z + 3(1 t) 2 tp 2. z + 3(1 t)t 2 P 3. z + t 3 P 4. z gdzie: P.x, P.y, P.z - współrzędne x, y i z punktu P t - parametr z przedziału [0,1] określający, w którym miejscu krzywej znajduje się szukany punkt. Przykładowo dla t=0 otrzymujemy punkt P1, a dla t=1 punkt P4. Aby otrzymać obraz (współrzędne punktów) całej krzywej należy zmieniać wartość t z odpowiednio małym krokiem. Przy łączeniu kilku segmentów krzywej Beziera należy dopilnować, aby zachowana była ciągłość w punkcie łączenia dwóch punktów końcowych.
![z - współrzędne x, y i z punktu P t - parametr z przedziału [0,1] określający, w którym miejscu krzywej znajduje się szukany punkt.](/docs-images/43/14602006/images/page_3.jpg "Przykładowo dla t=0 otrzymujemy punkt P1, a dla t=1 punkt P4. Aby otrzymać obraz (współrzędne punktów) całej krzywej należy zmieniać wartość t z odpowiednio małym krokiem.")
4 Oznacza to, że wspólny punkt końcowy oraz dwa punkty pośrednie muszą być różne i współliniowe. Krzywe Béziera mają następujące własności: Niezmienniczość afiniczna reprezentacji. Suma wielomianów Bernsteina stopnia n jest równa 1, a zatem dla dowolnego t R punkt p(t) jest kombinacją afiniczną punktów kontrolnych. Ponieważ przekształcenia afiniczna zachowują kombinacje afiniczne więc dla ustalonego przekształcenia afinicznego f i dla każdego t odpowiedni punkt krzywej Béziera reprezentowanej przez punkty kontrolne f(p 0 ),, f(p n ) jest równy f(p(t)). Innymi słowy, aby otrzymać obraz krzywej Béziera w dowolnym przekształceniu afinicznym, wystarczy poddać temu przekształceniu jej punkty kontrolne.

5 Własność otoczki wypukłej. Dla t [0,1] punkt p(t) jest kombinacją wypukłą punktów kontrolnych (wielomiany Bernsteina są w przedziale [0,1] nieujemne), a więc należy do otoczki wypukłej ich zbioru. Zachodzi interpolacja skrajnych punktów kontrolnych: p(0) = p 0, p(1) = p n Dla t [0,1] krzywa Béziera nie ma z żadną prostą (na płaszczyźnie) albo płaszczyzną (w przestrzeni) większej liczby punktów przecięcia niż jej łamana kontrolna (to się nazywa własnością zmniejszania wariacji). Istnieje możliwość podwyższenia stopnia, czyli znalezienia reprezentacji stopnia n+1. Związek obu reprezentacji wyraża się wzorami n n+1 p(t) = p i B i n (t) = p ib i n+1 (t) i=0 p i = i n + 1 p n + 1 i i 1 + n + 1 p i Podwyższanie stopnia możemy iterować, dostając reprezentacje coraz wyższych stopni. Ciąg łamanych kontrolnych otrzymanych w ten sposób zbiega jednostajnie do krzywej dla t [0,1]. Zbieżność tego ciągu jest jednak zbyt wolna, aby miała praktyczne znaczenie. i=0
 = p i B i n (t) = p ib i n+1 (t) i=0 p i = i n + 1 p n + 1 i i 1 + n + 1 p i Podwyższanie stopnia możemy iterować, dostając reprezentacje coraz")
6 Jeśli kolejne punkty kontrolne leżą na prostej, w kolejności indeksów i w równych odstępach, to krzywa Béziera jest odcinkiem sparametryzowanym ze stałą prędkością. Najłatwiej jest udowodnić to rozpatrując reprezentację odcinka w postaci krzywej Béziera stopnia 1 i jego reprezentacje otrzymane przez podwyższanie stopnia. Pochodna krzywej Béziera o punktach kontrolnych p 0,, p n wyraża się wzorem n 1 n 1 p (t) = n(p i+1 p i )B i n 1 (t) = n p i B i n 1 (t) i=0 i=0

![Na podstawie własności otoczki wypukłej mamy więc własność hodografu, według której kierunek wektora p (t) t [0,1] jest zawarty w stożku rozpiętym przez wektory P i = p i+1 p i dla i=0,, n-1.](/docs-images/30/14602006/images/7-0.png "Ponadto zachodzą równości p (0) = n(p 1 p 0 ) oraz p (1) = n(p n p n 1 ). Podział krzywej.")
7 Na podstawie własności otoczki wypukłej mamy więc własność hodografu, według której kierunek wektora p (t) t [0,1] jest zawarty w stożku rozpiętym przez wektory P i = p i+1 p i dla i=0,, n-1. Ponadto zachodzą równości p (0) = n(p 1 p 0 ) oraz p (1) = n(p n p n 1 ). Podział krzywej. Punkty p 0 (0),, p0 (n) oraz p0 (n),, pn (0), otrzymane w trakcie wykonywania algorytmu de Casteljau, są punktami kontrolnymi tej samej krzywej, w innych parametryzacjach. Dokładniej, dla dowolnego s R zachodzą równości:
,, p0 (n) oraz p0 (n),, pn (0), otrzymane w trakcie wykonywania algorytmu de Casteljau, są punktami kontrolnymi")
8 n p(s) = p i B i s (s) = p 0 (i) Bi n ( s t ) i=0 n i=0 (n i) = p n s t i Bi ( 1 t ) Aby narysować krzywą, możemy dzielić ją na,,dostatecznie krótkie łuki i rysować zamiast nich odcinki. Otoczka wypukła łamanej kontrolnej,,całej krzywej jest z reguły znacznie większa niż suma otoczek łamanych kontrolnych kilku jej fragmentów, a zatem przez podział możemy uzyskiwać znacznie dokładniejsze oszacowania położenia krzywej. Algorytm szybkiego obliczania punktu p(t) (o koszcie O(n) zamiast O(n 2 )), jak w przypadku algorytmu de Casteljau) możemy uzyskać, adaptując schemat Hornera. Podstawiając s=1-t, otrzymujemy n i=0

 sprawiałoby różne kłopoty implementacyjne (bardzo duże wartości współczynników dwumianowych, wysoki koszt algorytmów obliczania punktu).")
9 Krzywe B-sklejane Określenie krzywych B-sklejanych Modelowanie figur o skomplikowanym kształcie wymagałoby użycia krzywych Béziera wysokiego stopnia, co oprócz niewygody (z punktu widzenia użytkownika programu interakcyjnego) sprawiałoby różne kłopoty implementacyjne (bardzo duże wartości współczynników dwumianowych, wysoki koszt algorytmów obliczania punktu). Dlatego często stosuje się krzywe kawałkami wielomianowe w reprezentacji B-sklejanej; jest ona uogólnieniem reprezentacji Béziera krzywych wielomianowych. Rys. Porównanie krzywej Béziera z krzywą B-sklejaną

10 Krzywa B-sklejana jest określona przez podanie: stopnia n, ciągu N+1 węzłów u 0,, u N (ciąg ten powinien być niemalejący, a ponadto N powinno być większe od 2n), oraz N-n punktów kontrolnych d 0,, d N n 1.Wzór, który jest definicją krzywej B-sklejanej ma postać: N n 1 s(t) = d 1 N i n (t) i=0 t [u n, u N n ] We wzorze tym występują funkcje B-sklejane N n i stopnia n, które są określone przez ustalony ciąg węzłów. Istnieje kilka definicji funkcji B-sklejanych, które różnią się stopniem skomplikowania, a także trudnością dowodzenia na podstawie takiej definicji różnych własności tych funkcji (w zasadzie więc wychodzi na jedno, której definicji użyjemy, jeśli chcemy dowodzić twierdzenia, to trudności nie da się uniknąć). Ponieważ w tym wykładzie ograniczamy się do praktycznych aspektów zagadnienia, więc przytoczę rekurencyjny wzór Mansfielda-de Boora- Coxa, który w książkach o grafice chyba najczęściej pełni rolę definicji: N 0 i (t) = { 1 dla t [u i, u i+1 ] 0 przewiwnym razie N i n (t) = t u i u i+n u i N i n 1 (t) + u i+n+1 t u i+n+1 u i+1 N i+1 n 1 (t) dla n > 0
![Wzór, który jest definicją krzywej B-sklejanej ma postać: N n 1 s(t) = d 1 N i n (t) i=0 t [u n, u N n ] We wzorze tym występują funkcje B-sklejane N n i stopnia n, które są określone przez ustalony](/docs-images/43/14602006/images/page_10.jpg "ciąg węzłów.")
11 Podstawowe własności krzywych B-sklejanych Własności krzywych B-sklejanych najbardziej istotne w zastosowaniach związanych z grafiką komputerową, są takie: Jeśli wszystkie węzły od u n do u N n są różne (tworzą ciąg rosnący), to krzywa składa się z N-2n łuków wielomianowych. W przeciwnym razie (jeśli występują tzw. węzły krotne), to liczba łuków jest mniejsza. Algorytm de Boora dokonuje liniowej interpolacji kolejno otrzymywanych punktów (liczby α i (j) należą do przedziału [0,1]) stąd wynika silna własność otoczki wypukłej: wszystkie punkty łuku dla t [u k,, u k+1 ] leżą w otoczce wypukłej punktów d k n,, d k. Mamy też afiniczną niezmienniczość tej reprezentacji krzywej. W celu otrzymania jej obrazu w dowolnym przekształceniu afinicznym, wystarczy zastosować to przekształcenie do punktów kontrolnych d 0,, d N n 1. Rys. Silna własność otoczki wypukłej
![Algorytm de Boora dokonuje liniowej interpolacji kolejno otrzymywanych punktów (liczby α i (j) należą do przedziału [0,1]) stąd wynika silna własność otoczki wypukłej: wszystkie punkty łuku dla t [u](/docs-images/43/14602006/images/page_11.jpg "k,, u k+1 ] leżą w otoczce wypukłej punktów d k n,, d k. Mamy też afiniczną niezmienniczość tej reprezentacji krzywej.")
![Lokalna kontrola kształtu. Ponieważ punkt s(t) dla t [u k,, u k+1 ] zależy tylko od punktów d k n,, d k więc zmiana punktu d i powoduje zmianę fragmentu krzywej dla t [u i, u i+n+1 ].](/docs-images/30/14602006/images/12-0.png "Pochodna krzywej B-sklejanej stopnia n jest krzywą stopnia n-1 N n 2 s n (t) = (d u i+n+1 u i+1 d i )N n 1 i+1 (t) i+1 i=0 Jeśli dwa sąsiednie węzły są n-krotne, to łuk krzywej między nimi jest")
12 Lokalna kontrola kształtu. Ponieważ punkt s(t) dla t [u k,, u k+1 ] zależy tylko od punktów d k n,, d k więc zmiana punktu d i powoduje zmianę fragmentu krzywej dla t [u i, u i+n+1 ]. Pochodna krzywej B-sklejanej stopnia n jest krzywą stopnia n-1 N n 2 s n (t) = (d u i+n+1 u i+1 d i )N n 1 i+1 (t) i+1 i=0 Jeśli dwa sąsiednie węzły są n-krotne, to łuk krzywej między nimi jest krzywą Béziera
![i powoduje zmianę fragmentu krzywej dla t [u i, u i+n+1 ].](/docs-images/43/14602006/images/page_12.jpg "Pochodna krzywej B-sklejanej stopnia n jest krzywą stopnia n-1 N n 2 s n (t) = (d u i+n+1 u i+1 d")
.")
13 Powierzchnie Béziera i B-sklejane Płaty tensorowe Do określenia powierzchni potrzebne są funkcje dwóch zmiennych. Najczęściej wykorzystuje się iloczyn tensorowy przestrzeni funkcji jednej zmiennej. Użycie go prowadzi do wzorów, które opisują odpowiednio płat powierzchni Béziera i płat powierzchni B-sklejanej stopnia (n,m). W przypadku płata B-sklejanego, nawet jeśli stopień ze względu na każdy parametr jest taki sam, można podać inny ciąg węzłów określających funkcje bazowe. p(u, v) = n m i=0 j=0 p ij B n i (u)b m j (v) s(u, v) = N n 1 M m 1 d ij N n i (u)n m j (v) i=0 j=0 Rys. Płat B-sklejany

14 Dziedziną płata Béziera jest zwykle kwadrat jednostkowy. Dziedziną płata B- sklejanego jest prostokąt [u n, u N n ] [v m, v M m ]. Często dziedzinę otrzymuje się przez odrzucenie fragmentów takiego prostokąta wówczas mamy wtedy płat obcięty. Rys. Obcięty płat Béziera Punkty kontrolne płata każdego z tych rodzajów dla wygody kształtowania przedstawia się w postaci siatki. Wyróżniamy w niej wiersze i kolumny. Wyznaczenie punktu na powierzchni, dla ustalonych parametrów u i v można sprowadzić do wyznaczania punktów na krzywych (Béziera albo B-sklejanych): p(u, v) = n m i=0( j=0 p ij B m j (v)) B n i (u) = n i=0 q i B n i (u)

15 Wszystkie działania wykonujemy na kolumnach siatki, traktując je tak, jakby to były łamane kontrolne krzywych. Punkty tych krzywych, odpowiadające ustalonemu v, są punktami kontrolnymi krzywej stałego parametru u leżącymi na płacie. Można też postąpić w odwrotnej kolejności i najpierw przetwarzać wiersze, a potem kolumnę otrzymanych punktów. Zasada przetwarzania reprezentacji płata w celu podwyższenia stopnia, podziału na kawałki, wstawienia węzła i obliczenia pochodnych cząstkowych jest identyczna. Płaty trójkątne Dziedziną trójkątnego płata Béziera jest zwykle trójkąt, którego wierzchołki stanowią układ odniesienia układu współrzędnych barycentrycznych r, s, t. Suma tych współrzędnych jest równa 1, wewnątrz trójkąta mają one wartości dodatnie. Płat jest określony wzorem, w którym występują wielomiany Bernsteina trzech zmiennych stopnia n i punkty kontrolne r, s, t będące wierzchołkami siatki kontrolnej płata trójkątnego. p(r, s, t) = p ijk B n ijk (r, s, t) i,j,k 0 i+j+k=n


16 Rys. Trójkątny płat Béziera i jego siatka kontrolna Płaty Béziera w praktyce Bicubic_patch jest zakrzywioną powierzchnią 3D utworzoną z siatki trójkątów. POV-Ray obsługuje typ Bicubic o nazwie patch Beziera. Funkcja bicubic_patch jest zdefiniowana w następujący sposób bicubic_patch { type t // 0 lub 1 (0 - mniej pamięci) [u_steps nu] // liczba wierszy w siatce końcowej [v_steps nv] // liczba kolumn w siatce końcowej [flatness f] // test gładkości <x1, y1, z1> <x2, y2, z2> <x16, y16, z16> // punkty kontrolne
![Funkcja bicubic_patch jest zdefiniowana w następujący sposób bicubic_patch { type t // 0 lub 1 (0 - mniej pamięci) [u_steps nu]](/docs-images/43/14602006/images/page_16.jpg "// liczba wierszy w siatce końcowej [v_steps nv] // liczba kolumn w siatce końcowej [flatness f] // test gładkości <x1, y1, z1>")
![[(opt.)] } Parametry u_steps i v_steps przyjmują wartości całkowite, które określają ile wierszy i kolumn trójkątów zostanie minimalne użytych do utworzenia zdefiniowanej powierzchni.](/docs-images/30/14602006/images/17-0.png "Maksymalną liczbę poszczególnych kawałków plastra, które są testowane przez POV- Ray można obliczyć z następującego równania: 2 u_steps 2 v steps.")
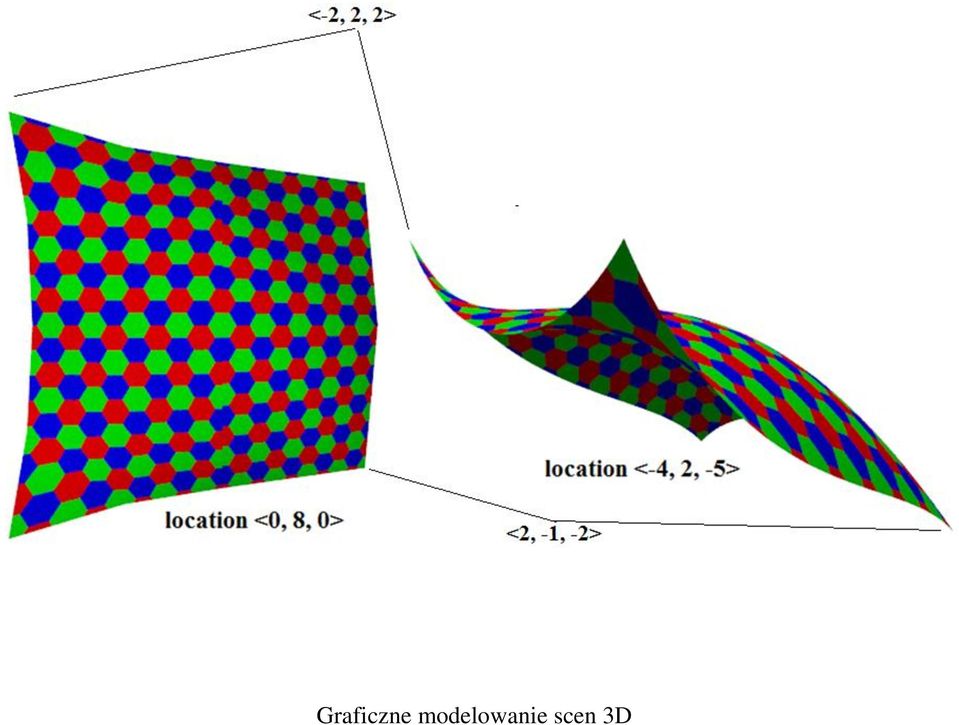
17 [(opt.)] } Parametry u_steps i v_steps przyjmują wartości całkowite, które określają ile wierszy i kolumn trójkątów zostanie minimalne użytych do utworzenia zdefiniowanej powierzchni. Maksymalną liczbę poszczególnych kawałków plastra, które są testowane przez POV- Ray można obliczyć z następującego równania: 2 u_steps 2 v steps. Przykład Powierzchnia rozpięta pomiędzy 16-oma zdefiniowanymi punktami.

18
19
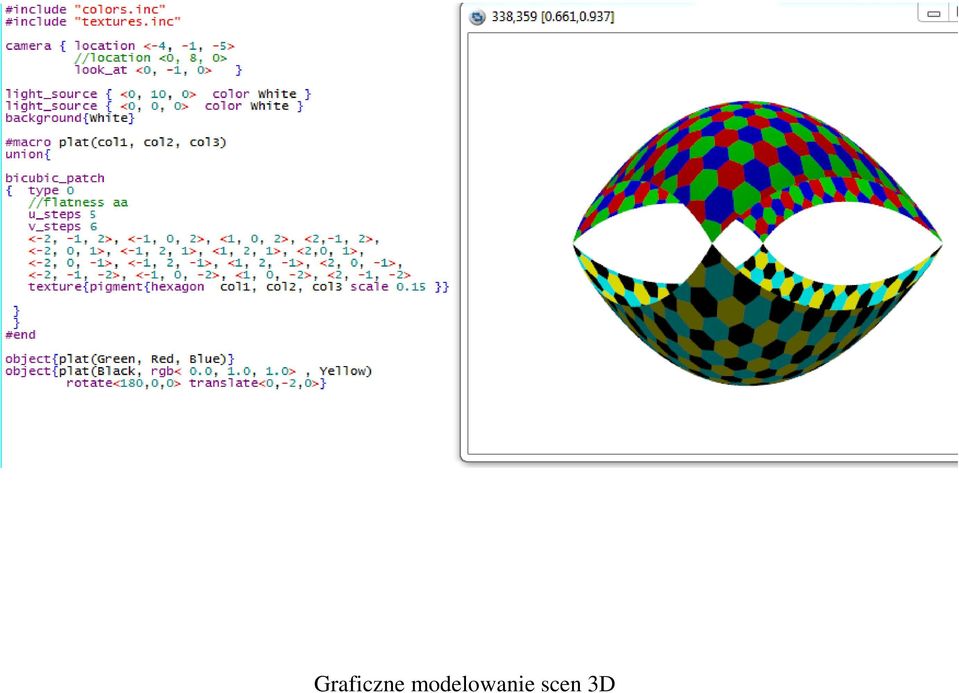

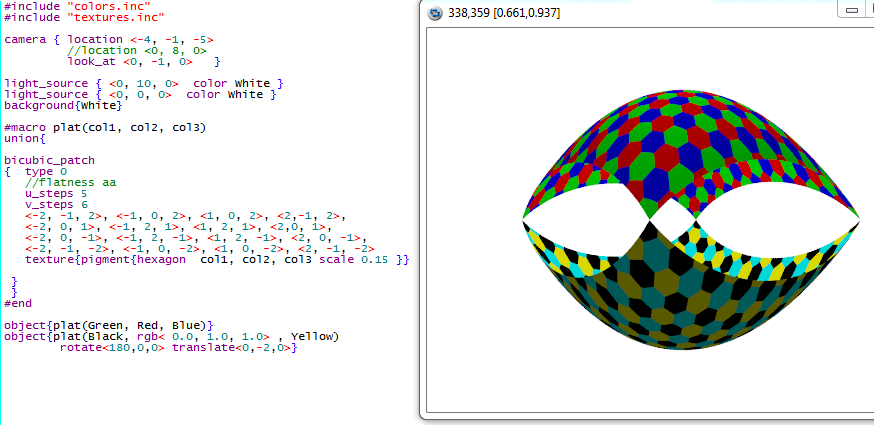
20 Powierzchnia uzyskana poprzez odpowiednie obrócenia i przesunięcia 6-ciu obiektów typu plat


21 Krzywe Béziera w praktyce

22 Program generuje gotowy kod do POV-Ray a (daje możliwość wyboru pomiędzy lathe a prism)
23 Przykład
24 Przykład
25 Przykład połącznia dwóch osobno opracowanych elementów.
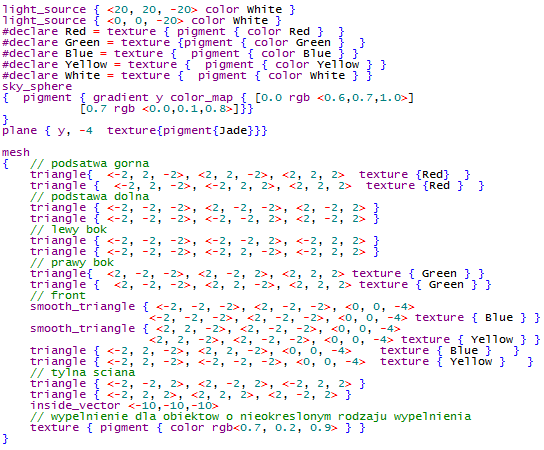
26 Siatka (mesh) Obiekty mesh są bardzo przydatne ponieważ pozwalają nam na tworzenie obiektów zawierających setki lub tysiące trójkątów. W praktyce oznacza to możliwość utworzenia niemal dowolnej bryły konstrukcji (bardziej złożone kształty oraz duża dokładność odwzorowywanego elementów wiążą się z zastosowaniem dużej liczby trójkątów). Wszystkie tekstury, których chcemy zastosować wewnątrz siatki musimy zdefiniować przed jej utworzeniem. Tekstury (w tym parametr color) nie może być określony wewnątrz siatki ze względu na niską wydajność pamięci. mesh { triangle { <x1, y1, z1>, <x2, y2, z2>, <x3, y3, z3> [(opt.)] } triangle { <x1, y1, z1>, <x2, y2, z2>, <x3, y3, z3> [(opt.)] }... [inside_vector <x, y, z>] [(opt.)] } W przypadku gdy siatka jest zamknięta to możemy jej użyć do CSG, ale musimy podać inside_vector (wektor definiujący kierunek do wewnątrz).
27 Przykład
28
 można zmontować film (animację).")
29 Tworzenie filmów animacji W ramach programu POV-Ray nie ma możliwości bezpośredniego tworzenia animacji. Jednak istnieje możliwość wygenerowania określonej liczby kolejnych scen, z których za pośrednictwem innego programu (np. bmp2avi) można zmontować film (animację). Do wygenerowania określonej liczby scen wykorzystuje się zmienną clock, która domyślnie zmienia swoją wartość od 0 do 1 z wartością kroku uzależnioną od liczby zdefiniowanych klatek (scen). W ramach podstawowego zastosowania programu POV-Ray (quickres.ini) liczbę klatek definiuje się następująco: -j +kffx gdzie x jest liczbą klatek jakie mają zostać wygenerowane. Należy zwrócić uwagę na rozmiar oraz parametry generowanych scen (im większa scen tym dłuższy czas generowania co ma duże znaczenie w przypadku generowania większej liczby scen).

30 Ponieważ zmienna clock domyślnie przyjmuje kolejne wartości z zakresu od 0 do 1 dlatego należy opracować metodę umożliwiającą jej wykorzystanie do zmiany płożenia ruchomych obiektów w ramach danej sceny. Przykład (animacja przykładu z wykładu 2) Przyjęte założenia: poruszająca się w kierunku górnego prawego rogu bramki piłka uderzona z 20 metra (z punktu (0,0,-20)), poruszająca się za piłką kamera, interweniujący bramkarz.
31 Przykład (animacja przykładu z laboratorium 1) Przyjęte założenia: obejście budynku dookoła (360 stopni, wzrok skierowany na budynek) wejście przez drzwi wejściowe a następnie odwiedzenie kuchni i dużego pokoju (płynne zmiany kierunku i miejsca na który skierowany jest wzrok - kamera).

32 Ponieważ budynek o wymiarach (20,15,6) był utworzony od współrzędnych (0,0,0) to przed procesem projektowania animacji należy go wyważyć względem punktu ciężkości na płaszczyźnie XY (translate<-10, 0, -7.5>).
33 Położenie budynku ma duże znaczenie wobec zastosowania funkcji rotate, za pośrednictwem której zrealizowano okrążenie budynku.
34
![Pliki konfiguracyjne (*.ini) Tak jak pokazały powyższe przykłady domyślna wartość zmiennej clock [0,1] w praktycznym zastosowaniu wymaga obróbki (przemnożenia przez odpowiednią wartość).](/docs-images/30/14602006/images/35-0.png "Jednak istnieje możliwość zdefiniowania własnych parametrów generowanej sceny (w tym zakresu zmiennej clock) za pośrednictwem własnego pliku konfiguracyjnego (domyślna ścieżka to")
35 Pliki konfiguracyjne (*.ini) Tak jak pokazały powyższe przykłady domyślna wartość zmiennej clock [0,1] w praktycznym zastosowaniu wymaga obróbki (przemnożenia przez odpowiednią wartość). Jednak istnieje możliwość zdefiniowania własnych parametrów generowanej sceny (w tym zakresu zmiennej clock) za pośrednictwem własnego pliku konfiguracyjnego (domyślna ścieżka to C:\Users\nazwa_konta\Documents\POV-Ray\v3.7\ini).

36 W plikach konfiguracyjnych możemy zdefiniować różne właściwości dotyczące renderingu. [nazwa pliku, dane informacyjne] Height/Width wysokość/szerokość wynikowego obrazu, Oputput_File_Type typ obrazu wynikowego (C TGA z kompresja, T TGA bez kompresji, N PNG, P PPM, S BMP), Quality jakość renderingu liczba ze zbioru {0,...,11} (domyślnie 9),
37 Antialias wygładzanie krawędzi (on włączony, off wyłączony). Antialias_Threshold współczynnik wygładzania, Initial_Clock wartość początkowa zmiennej clock, Final_Clock wartość końcowa zmiennej clock, Initial_Frame numer pierwszej klatki, Final_Frame numer ostatniej klatki (Final_Frame - Initial_Frame = liczba klatek do wyrenderowania), Dodatkowo: Input_File_Name nazwa skryptu, którego dotyczy plik ini, Output_File_Name nazwa wynikowego obrazu, Antialias_Depth opisuje głębie antialiasu (wartości 1 do 9) W sytuacji jeżeli któreś sceny źle wyrenderują się (ew. chcemy coś w nich zmodyfikować) wówczas nie musimy całego procesu powtarzać od początku tylko możemy zdefiniować zakres scen, które mają zostać ponownie wygenerowane. Subset_Start_Frame numer sceny od której rozpocznie się proces renderowania, Subset_End_Frame numer sceny na której skończy się proces renderowania.
 wartość początkowa clock to 1 a końcowa 140 co przy 140 klatkach (od 1 do 140) oznacza, że wartość clock będzie")
38 W przykładzie (moj_plik_konfiguracyjny.ini) wartość początkowa clock to 1 a końcowa 140 co przy 140 klatkach (od 1 do 140) oznacza, że wartość clock będzie przyjmowała kolejne wartości całkowite: 1, 2, 3,,139, 140. Zmodyfikowany przykład (laboratorium 1)
Graficzne modelowanie scen 3D. POV-Ray. Wykład 3
 POV-Ray Wykład 3 Typy źródeł światła: rozproszone, kierunkowe, punktowe i reflektor. źródło zewnętrzne Źródło światła kierunkowe Źródło światła bardzo oddalone od oświetlanego obiektu Można założyć że
POV-Ray Wykład 3 Typy źródeł światła: rozproszone, kierunkowe, punktowe i reflektor. źródło zewnętrzne Źródło światła kierunkowe Źródło światła bardzo oddalone od oświetlanego obiektu Można założyć że
Ćwiczenia nr 7. TEMATYKA: Krzywe Bézier a
 TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
Grafika komputerowa Wykład 8 Modelowanie obiektów graficznych cz. II
 Grafika komputerowa Wykład 8 Modelowanie obiektów graficznych cz. II Instytut Informatyki i Automatyki Państwowa Wyższa Szkoła Informatyki i Przedsiębiorczości w Łomży 2 0 0 9 Spis treści Spis treści 1
Grafika komputerowa Wykład 8 Modelowanie obiektów graficznych cz. II Instytut Informatyki i Automatyki Państwowa Wyższa Szkoła Informatyki i Przedsiębiorczości w Łomży 2 0 0 9 Spis treści Spis treści 1
Grafika komputerowa Wykład 7 Modelowanie obiektów graficznych cz. I
 Grafika komputerowa Wykład 7 Modelowanie obiektów graficznych cz. I Instytut Informatyki i Automatyki Państwowa Wyższa Szkoła Informatyki i Przedsiębiorczości w Łomży 2 0 0 9 Spis treści Spis treści 1
Grafika komputerowa Wykład 7 Modelowanie obiektów graficznych cz. I Instytut Informatyki i Automatyki Państwowa Wyższa Szkoła Informatyki i Przedsiębiorczości w Łomży 2 0 0 9 Spis treści Spis treści 1
składa się z m + 1 uporządkowanych niemalejąco liczb nieujemnych. Pomiędzy p, n i m zachodzi następująca zależność:
 TEMATYKA: Krzywe typu Splajn (Krzywe B sklejane) Ćwiczenia nr 8 Krzywe Bezier a mają istotne ograniczenie. Aby uzyskać kształt zawierający wiele punktów przegięcia niezbędna jest krzywa wysokiego stopnia.
TEMATYKA: Krzywe typu Splajn (Krzywe B sklejane) Ćwiczenia nr 8 Krzywe Bezier a mają istotne ograniczenie. Aby uzyskać kształt zawierający wiele punktów przegięcia niezbędna jest krzywa wysokiego stopnia.
VI. FIGURY GEOMETRYCZNE i MODELE
 VI. FIGURY GEOMETRYCZNE i MODELE 6.1. Wprowadzenie Jednym z głównych zastosowań grafiki komputerowej jest modelowanie obiektów, czyli ich opis matematyczny, na podstawie którego na ekranie można stworzyć
VI. FIGURY GEOMETRYCZNE i MODELE 6.1. Wprowadzenie Jednym z głównych zastosowań grafiki komputerowej jest modelowanie obiektów, czyli ich opis matematyczny, na podstawie którego na ekranie można stworzyć
Modelowanie krzywych i powierzchni
 3 Modelowanie krzywych i powierzchni Modelowanie powierzchniowe jest kolejną metodą po modelowaniu bryłowym sposobem tworzenia części. Jest to też sposób budowy elementu bardziej skomplikowany i wymagający
3 Modelowanie krzywych i powierzchni Modelowanie powierzchniowe jest kolejną metodą po modelowaniu bryłowym sposobem tworzenia części. Jest to też sposób budowy elementu bardziej skomplikowany i wymagający
Grafika 2D. Animacja Zmiany Kształtu. opracowanie: Jacek Kęsik
 Grafika 2D Animacja Zmiany Kształtu opracowanie: Jacek Kęsik Wykład przedstawia podstawy animacji zmiany kształtu - morfingu Animacja zmiany kształtu Podstawowe pojęcia Zlewanie (Dissolving / cross-dissolving)
Grafika 2D Animacja Zmiany Kształtu opracowanie: Jacek Kęsik Wykład przedstawia podstawy animacji zmiany kształtu - morfingu Animacja zmiany kształtu Podstawowe pojęcia Zlewanie (Dissolving / cross-dissolving)
Techniki wizualizacji. Ćwiczenie 10. System POV-ray tworzenie animacji
 Doc. dr inż. Jacek Jarnicki Instytut Informatyki, Automatyki i Robotyki Politechniki Wrocławskiej jacek.jarnicki@pwr.wroc.pl Techniki wizualizacji Ćwiczenie 10 System POV-ray tworzenie animacji Celem ćwiczenia
Doc. dr inż. Jacek Jarnicki Instytut Informatyki, Automatyki i Robotyki Politechniki Wrocławskiej jacek.jarnicki@pwr.wroc.pl Techniki wizualizacji Ćwiczenie 10 System POV-ray tworzenie animacji Celem ćwiczenia
Algorytmy i struktury danych. Wykład 4
 Wykład 4 Różne algorytmy - obliczenia 1. Obliczanie wartości wielomianu 2. Szybkie potęgowanie 3. Algorytm Euklidesa, liczby pierwsze, faktoryzacja liczby naturalnej 2017-11-24 Algorytmy i struktury danych
Wykład 4 Różne algorytmy - obliczenia 1. Obliczanie wartości wielomianu 2. Szybkie potęgowanie 3. Algorytm Euklidesa, liczby pierwsze, faktoryzacja liczby naturalnej 2017-11-24 Algorytmy i struktury danych
Techniki animacji komputerowej
 Techniki animacji komputerowej 1 Animacja filmowa Pojęcie animacji pochodzi od ożywiania i ruchu. Animować oznacza dawać czemuś życie. Słowem animacja określa się czasami film animowany jako taki. Animacja
Techniki animacji komputerowej 1 Animacja filmowa Pojęcie animacji pochodzi od ożywiania i ruchu. Animować oznacza dawać czemuś życie. Słowem animacja określa się czasami film animowany jako taki. Animacja
Metody numeryczne I Równania nieliniowe
 Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Opis krzywych w przestrzeni 3D. Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej AGH
 Opis krzywych w przestrzeni 3D Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej AGH Krzywe Beziera W przypadku tych krzywych wektory styczne w punkach końcowych są określane bezpośrednio
Opis krzywych w przestrzeni 3D Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej AGH Krzywe Beziera W przypadku tych krzywych wektory styczne w punkach końcowych są określane bezpośrednio
Interpolacja. Marcin Orchel. Drugi przypadek szczególny to interpolacja trygonometryczna
 Interpolacja Marcin Orchel 1 Wstęp Mamy daną funkcję φ (x; a 0,..., a n ) zależną od n + 1 parametrów a 0,..., a n. Zadanie interpolacji funkcji φ polega na określeniu parametrów a i tak aby dla n + 1
Interpolacja Marcin Orchel 1 Wstęp Mamy daną funkcję φ (x; a 0,..., a n ) zależną od n + 1 parametrów a 0,..., a n. Zadanie interpolacji funkcji φ polega na określeniu parametrów a i tak aby dla n + 1
Przy dużej wielkości głębokości uzyskamy wrażenie nieskończoności: Dla głębokości zerowej uzyskamy tekst płaski:
 Temat 6: Tekst w przestrzeni trójwymiarowej. Podstawy tworzenia animacji. Instrukcja warunkowa if. Program pozwala umieszczać na scenie nie tylko bryły, czy figury płaskie, ale też tekst. Polecenie tworzące
Temat 6: Tekst w przestrzeni trójwymiarowej. Podstawy tworzenia animacji. Instrukcja warunkowa if. Program pozwala umieszczać na scenie nie tylko bryły, czy figury płaskie, ale też tekst. Polecenie tworzące
ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II
 ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II POZIOM ROZSZERZONY Równania i nierówności z wartością bezwzględną. rozwiązuje równania i nierówności
ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II POZIOM ROZSZERZONY Równania i nierówności z wartością bezwzględną. rozwiązuje równania i nierówności
(1,10) (1,7) (5,5) (5,4) (2,1) (0,0) Grafika 3D program POV-Ray - 73 -
 (1,7) (5,5) (5,4) (2,1) (0,0) Grafika 3D program POV-Ray - 73 -") Temat 10: Tworzenie brył obrotowych poprzez obrót krzywych (lathe). W poprzednim temacie wymodelowaliśmy kieliszek obracając krzywą Beziera wokół osi Y. Zastosowaliśmy w tym celu polecenie lathe. Krzywa
Temat 10: Tworzenie brył obrotowych poprzez obrót krzywych (lathe). W poprzednim temacie wymodelowaliśmy kieliszek obracając krzywą Beziera wokół osi Y. Zastosowaliśmy w tym celu polecenie lathe. Krzywa
Korzystanie z podstawowych rozkładów prawdopodobieństwa (tablice i arkusze kalkulacyjne)
") Korzystanie z podstawowych rozkładów prawdopodobieństwa (tablice i arkusze kalkulacyjne) Przygotował: Dr inż. Wojciech Artichowicz Katedra Hydrotechniki PG Zima 2014/15 1 TABLICE ROZKŁADÓW... 3 ROZKŁAD
Korzystanie z podstawowych rozkładów prawdopodobieństwa (tablice i arkusze kalkulacyjne) Przygotował: Dr inż. Wojciech Artichowicz Katedra Hydrotechniki PG Zima 2014/15 1 TABLICE ROZKŁADÓW... 3 ROZKŁAD
0. OpenGL ma układ współrzędnych taki, że oś y jest skierowana (względem monitora) a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do
 a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do") 0. OpenGL ma układ współrzędnych taki, że oś y jest skierowana (względem monitora) a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do obserwatora f) w kierunku od obserwatora 1. Obrót dookoła osi
0. OpenGL ma układ współrzędnych taki, że oś y jest skierowana (względem monitora) a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do obserwatora f) w kierunku od obserwatora 1. Obrót dookoła osi
W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora.
 1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
Programowanie liniowe
 Programowanie liniowe Maciej Drwal maciej.drwal@pwr.wroc.pl 1 Problem programowania liniowego min x c T x (1) Ax b, (2) x 0. (3) gdzie A R m n, c R n, b R m. Oznaczmy przez x rozwiązanie optymalne, tzn.
Programowanie liniowe Maciej Drwal maciej.drwal@pwr.wroc.pl 1 Problem programowania liniowego min x c T x (1) Ax b, (2) x 0. (3) gdzie A R m n, c R n, b R m. Oznaczmy przez x rozwiązanie optymalne, tzn.
10.3. Typowe zadania NMT W niniejszym rozdziale przedstawimy podstawowe zadania do jakich może być wykorzystany numerycznego modelu terenu.
 Waldemar Izdebski - Wykłady z przedmiotu SIT 91 10.3. Typowe zadania NMT W niniejszym rozdziale przedstawimy podstawowe zadania do jakich może być wykorzystany numerycznego modelu terenu. 10.3.1. Wyznaczanie
Waldemar Izdebski - Wykłady z przedmiotu SIT 91 10.3. Typowe zadania NMT W niniejszym rozdziale przedstawimy podstawowe zadania do jakich może być wykorzystany numerycznego modelu terenu. 10.3.1. Wyznaczanie
Ruch jednostajnie zmienny prostoliniowy
 Ruch jednostajnie zmienny prostoliniowy Przyspieszenie w ruchu jednostajnie zmiennym prostoliniowym Jest to taki ruch, w którym wektor przyspieszenia jest stały, co do wartości (niezerowej), kierunku i
Ruch jednostajnie zmienny prostoliniowy Przyspieszenie w ruchu jednostajnie zmiennym prostoliniowym Jest to taki ruch, w którym wektor przyspieszenia jest stały, co do wartości (niezerowej), kierunku i
FUNKCJA LINIOWA - WYKRES
 FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (Postać kierunkowa) Funkcja liniowa jest podstawowym typem funkcji. Jest to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości
FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (Postać kierunkowa) Funkcja liniowa jest podstawowym typem funkcji. Jest to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości
WYKŁAD 10. kodem pierwotnym krzywej jest ciąg par współrzędnych x, y kolejnych punktów krzywej: (x 1, y 1 ), (x 2, y 2 ),...
, (x 2, y 2 ),...") WYKŁAD 10 Kompresja krzywych dyskretnych Kompresja krzywych dyskretnych KP SK = KW SK - stopień kompresji krzywej. KP [bajt] - obszar pamięci zajmowany przez kod pierwotny krzywej. KW [bajt] - obszar pamięci
WYKŁAD 10 Kompresja krzywych dyskretnych Kompresja krzywych dyskretnych KP SK = KW SK - stopień kompresji krzywej. KP [bajt] - obszar pamięci zajmowany przez kod pierwotny krzywej. KW [bajt] - obszar pamięci
WYMAGANIA Z WIEDZY I UMIEJĘTNOŚCI NA POSZCZEGÓLNE STOPNIE SZKOLNE DLA KLASY CZWARTEJ H. zakres rozszerzony. Wiadomości i umiejętności
 WYMAGANIA Z WIEDZY I UMIEJĘTNOŚCI NA POSZCZEGÓLNE STOPNIE SZKOLNE DLA KLASY CZWARTEJ H. zakres rozszerzony Funkcja wykładnicza i funkcja logarytmiczna. Stopień Wiadomości i umiejętności -definiować potęgę
WYMAGANIA Z WIEDZY I UMIEJĘTNOŚCI NA POSZCZEGÓLNE STOPNIE SZKOLNE DLA KLASY CZWARTEJ H. zakres rozszerzony Funkcja wykładnicza i funkcja logarytmiczna. Stopień Wiadomości i umiejętności -definiować potęgę
WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY DRUGIEJ LICEUM OGÓLNOKSZTAŁCĄCEGO ZAKRES PODSTAWOWY
 WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY DRUGIEJ LICEUM OGÓLNOKSZTAŁCĄCEGO ZAKRES PODSTAWOWY I. Funkcja liniowa dopuszczającą jeżeli: wie, jaką zależność między dwiema wielkościami zmiennymi nazywamy
WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY DRUGIEJ LICEUM OGÓLNOKSZTAŁCĄCEGO ZAKRES PODSTAWOWY I. Funkcja liniowa dopuszczającą jeżeli: wie, jaką zależność między dwiema wielkościami zmiennymi nazywamy
WYMAGANIA EDUKACYJNE NIEZBĘDNE DO OTRZYMANIA PRZEZ UCZNIA POSZCZEGÓLNYCH ŚRÓDROCZNYCH I ROCZNYCH OCEN KLASYFIKACYJNYCH Z MATEMATYKI
 WYMAGANIA EDUKACYJNE NIEZBĘDNE DO OTRZYMANIA PRZEZ UCZNIA POSZCZEGÓLNYCH ŚRÓDROCZNYCH I ROCZNYCH OCEN KLASYFIKACYJNYCH Z MATEMATYKI (zakres podstawowy) Rok szkolny 2017/2018 - klasa 2a, 2b, 2c 1. Funkcja
WYMAGANIA EDUKACYJNE NIEZBĘDNE DO OTRZYMANIA PRZEZ UCZNIA POSZCZEGÓLNYCH ŚRÓDROCZNYCH I ROCZNYCH OCEN KLASYFIKACYJNYCH Z MATEMATYKI (zakres podstawowy) Rok szkolny 2017/2018 - klasa 2a, 2b, 2c 1. Funkcja
Treść wykładu. Układy równań i ich macierze. Rząd macierzy. Twierdzenie Kroneckera-Capellego.
 . Metoda eliminacji. Treść wykładu i ich macierze... . Metoda eliminacji. Ogólna postać układu Układ m równań liniowych o n niewiadomych x 1, x 2,..., x n : a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21
. Metoda eliminacji. Treść wykładu i ich macierze... . Metoda eliminacji. Ogólna postać układu Układ m równań liniowych o n niewiadomych x 1, x 2,..., x n : a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21
1 Wstęp teoretyczny. Temat: Obcinanie odcinków do prostokąta. Grafika komputerowa 2D. Instrukcja laboratoryjna Prostokąt obcinający
 Instrukcja laboratoryjna 3 Grafika komputerowa 2D Temat: Obcinanie odcinków do prostokąta Przygotował: dr inż. Grzegorz Łukawski, mgr inż. Maciej Lasota, mgr inż. Tomasz Michno 1 Wstęp teoretyczny 1.1
Instrukcja laboratoryjna 3 Grafika komputerowa 2D Temat: Obcinanie odcinków do prostokąta Przygotował: dr inż. Grzegorz Łukawski, mgr inż. Maciej Lasota, mgr inż. Tomasz Michno 1 Wstęp teoretyczny 1.1
3. Macierze i Układy Równań Liniowych
 3. Macierze i Układy Równań Liniowych Rozważamy równanie macierzowe z końcówki ostatniego wykładu ( ) 3 1 X = 4 1 ( ) 2 5 Podstawiając X = ( ) x y i wymnażając, otrzymujemy układ 2 równań liniowych 3x
3. Macierze i Układy Równań Liniowych Rozważamy równanie macierzowe z końcówki ostatniego wykładu ( ) 3 1 X = 4 1 ( ) 2 5 Podstawiając X = ( ) x y i wymnażając, otrzymujemy układ 2 równań liniowych 3x
WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY TRZECIEJ NA ROK SZKOLNY 2011/2012 DO PROGRAMU MATEMATYKA Z PLUSEM
 WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY TRZECIEJ NA ROK SZKOLNY 2011/2012 DO PROGRAMU MATEMATYKA Z PLUSEM LICZBY, WYRAŻENIA ALGEBRAICZNE umie obliczyć potęgę o wykładniku naturalnym; umie obliczyć
WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY TRZECIEJ NA ROK SZKOLNY 2011/2012 DO PROGRAMU MATEMATYKA Z PLUSEM LICZBY, WYRAŻENIA ALGEBRAICZNE umie obliczyć potęgę o wykładniku naturalnym; umie obliczyć
FUNKCJA LINIOWA - WYKRES. y = ax + b. a i b to współczynniki funkcji, które mają wartości liczbowe
 FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (postać kierunkowa) Funkcja liniowa to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości liczbowe Szczególnie ważny w postaci
FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (postać kierunkowa) Funkcja liniowa to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości liczbowe Szczególnie ważny w postaci
Reprezentacje grafów nieskierowanych Reprezentacje grafów skierowanych. Wykład 2. Reprezentacja komputerowa grafów
 Wykład 2. Reprezentacja komputerowa grafów 1 / 69 Macierz incydencji Niech graf G będzie grafem nieskierowanym bez pętli o n wierzchołkach (x 1, x 2,..., x n) i m krawędziach (e 1, e 2,..., e m). 2 / 69
Wykład 2. Reprezentacja komputerowa grafów 1 / 69 Macierz incydencji Niech graf G będzie grafem nieskierowanym bez pętli o n wierzchołkach (x 1, x 2,..., x n) i m krawędziach (e 1, e 2,..., e m). 2 / 69
Grafika Komputerowa Wykład 5. Potok Renderowania Oświetlenie. mgr inż. Michał Chwesiuk 1/38
 Wykład 5 Potok Renderowania Oświetlenie mgr inż. 1/38 Podejście śledzenia promieni (ang. ray tracing) stosuje się w grafice realistycznej. Śledzone są promienie przechodzące przez piksele obrazu wynikowego
Wykład 5 Potok Renderowania Oświetlenie mgr inż. 1/38 Podejście śledzenia promieni (ang. ray tracing) stosuje się w grafice realistycznej. Śledzone są promienie przechodzące przez piksele obrazu wynikowego
Interpolacja, aproksymacja całkowanie. Interpolacja Krzywa przechodzi przez punkty kontrolne
 Interpolacja, aproksymacja całkowanie Interpolacja Krzywa przechodzi przez punkty kontrolne Aproksymacja Punkty kontrolne jedynie sterują kształtem krzywej INTERPOLACJA Zagadnienie interpolacji można sformułować
Interpolacja, aproksymacja całkowanie Interpolacja Krzywa przechodzi przez punkty kontrolne Aproksymacja Punkty kontrolne jedynie sterują kształtem krzywej INTERPOLACJA Zagadnienie interpolacji można sformułować
PLAN WYNIKOWY DLA KLASY DRUGIEJ POZIOM PODSTAWOWY I ROZSZERZONY. I. Proste na płaszczyźnie (15 godz.)
") PLAN WYNIKOWY DLA KLASY DRUGIEJ POZIOM PODSTAWOWY I ROZSZERZONY I. Proste na płaszczyźnie (15 godz.) Równanie prostej w postaci ogólnej Wzajemne połoŝenie dwóch prostych Nierówność liniowa z dwiema niewiadomymi
PLAN WYNIKOWY DLA KLASY DRUGIEJ POZIOM PODSTAWOWY I ROZSZERZONY I. Proste na płaszczyźnie (15 godz.) Równanie prostej w postaci ogólnej Wzajemne połoŝenie dwóch prostych Nierówność liniowa z dwiema niewiadomymi
INTERPOLACJA I APROKSYMACJA FUNKCJI
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Grafika 2D. Animacja Zmiany Kształtu. Wykład przedstawia podstawy animacji zmiany kształtu - morfingu. opracowanie: Jacek Kęsik
 Grafika 2D Animacja Zmiany Kształtu opracowanie: Jacek Kęsik Wykład przedstawia podstawy animacji zmiany kształtu - morfingu 1 Animacja zmiany kształtu Podstawowe pojęcia Zlewanie (Dissolving / cross-dissolving)
Grafika 2D Animacja Zmiany Kształtu opracowanie: Jacek Kęsik Wykład przedstawia podstawy animacji zmiany kształtu - morfingu 1 Animacja zmiany kształtu Podstawowe pojęcia Zlewanie (Dissolving / cross-dissolving)
WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY. (zakres podstawowy) klasa 2
 klasa 2") WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY (zakres podstawowy) klasa 2 1. Funkcja liniowa Tematyka zajęć: Proporcjonalność prosta Funkcja liniowa. Wykres funkcji liniowej Miejsce zerowe funkcji liniowej.
WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY (zakres podstawowy) klasa 2 1. Funkcja liniowa Tematyka zajęć: Proporcjonalność prosta Funkcja liniowa. Wykres funkcji liniowej Miejsce zerowe funkcji liniowej.
Interpolacja i modelowanie krzywych 2D i 3D
 Interpolacja i modelowanie krzywych 2D i 3D Dariusz Jacek Jakóbczak Politechnika Koszalińska Wydział Elektroniki i Informatyki Zakład Podstaw Informatyki i Zarządzania e-mail: Dariusz.Jakobczak@tu.koszalin.pl
Interpolacja i modelowanie krzywych 2D i 3D Dariusz Jacek Jakóbczak Politechnika Koszalińska Wydział Elektroniki i Informatyki Zakład Podstaw Informatyki i Zarządzania e-mail: Dariusz.Jakobczak@tu.koszalin.pl
Funkcje liniowe i wieloliniowe w praktyce szkolnej. Opracowanie : mgr inż. Renata Rzepińska
 Funkcje liniowe i wieloliniowe w praktyce szkolnej Opracowanie : mgr inż. Renata Rzepińska . Wprowadzenie pojęcia funkcji liniowej w nauczaniu matematyki w gimnazjum. W programie nauczania matematyki w
Funkcje liniowe i wieloliniowe w praktyce szkolnej Opracowanie : mgr inż. Renata Rzepińska . Wprowadzenie pojęcia funkcji liniowej w nauczaniu matematyki w gimnazjum. W programie nauczania matematyki w
Luty 2001 Algorytmy (7) 2000/2001 s-rg@siwy.il.pw.edu.pl
 2000/2001 s-rg@siwy.il.pw.edu.pl") System dziesiętny 7 * 10 4 + 3 * 10 3 + 0 * 10 2 + 5 *10 1 + 1 * 10 0 = 73051 Liczba 10 w tym zapisie nazywa się podstawą systemu liczenia. Jeśli liczba 73051 byłaby zapisana w systemie ósemkowym, co powinniśmy
System dziesiętny 7 * 10 4 + 3 * 10 3 + 0 * 10 2 + 5 *10 1 + 1 * 10 0 = 73051 Liczba 10 w tym zapisie nazywa się podstawą systemu liczenia. Jeśli liczba 73051 byłaby zapisana w systemie ósemkowym, co powinniśmy
Obliczenia iteracyjne
 Lekcja Strona z Obliczenia iteracyjne Zmienne iteracyjne (wyliczeniowe) Obliczenia iteracyjne wymagają zdefiniowania specjalnej zmiennej nazywanej iteracyjną lub wyliczeniową. Zmienną iteracyjną od zwykłej
Lekcja Strona z Obliczenia iteracyjne Zmienne iteracyjne (wyliczeniowe) Obliczenia iteracyjne wymagają zdefiniowania specjalnej zmiennej nazywanej iteracyjną lub wyliczeniową. Zmienną iteracyjną od zwykłej
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
MECHANIKA 2 KINEMATYKA. Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
Struktury danych i złożoność obliczeniowa Wykład 7. Prof. dr hab. inż. Jan Magott
 Struktury danych i złożoność obliczeniowa Wykład 7 Prof. dr hab. inż. Jan Magott Problemy NP-zupełne Transformacją wielomianową problemu π 2 do problemu π 1 (π 2 π 1 ) jest funkcja f: D π2 D π1 spełniająca
Struktury danych i złożoność obliczeniowa Wykład 7 Prof. dr hab. inż. Jan Magott Problemy NP-zupełne Transformacją wielomianową problemu π 2 do problemu π 1 (π 2 π 1 ) jest funkcja f: D π2 D π1 spełniająca
6 Grafika 2D. 6.1 Obiekty 2D
 6 Grafika 2D. J a c e k Ta r a s i u k 6.1 Obiekty 2D W wektorowej grafice dwuwymiarowej obraz opisuje się jako zbiór prostych obiektów geometrycznych takich jak: odcinki, elipsy, prostokąty itp 1. Każdy
6 Grafika 2D. J a c e k Ta r a s i u k 6.1 Obiekty 2D W wektorowej grafice dwuwymiarowej obraz opisuje się jako zbiór prostych obiektów geometrycznych takich jak: odcinki, elipsy, prostokąty itp 1. Każdy
PLAN WYNIKOWY (zakres podstawowy) klasa 2. rok szkolny 2015/2016
 klasa 2. rok szkolny 2015/2016") PLAN WYNIKOWY (zakres podstawowy) klasa 2. rok szkolny 2015/2016 Wymagania wykraczające zawierają w sobie wymagania dopełniające, te zaś zawierają wymagania podstawowe. Ocenę dopuszczającą powinien otrzymać
PLAN WYNIKOWY (zakres podstawowy) klasa 2. rok szkolny 2015/2016 Wymagania wykraczające zawierają w sobie wymagania dopełniające, te zaś zawierają wymagania podstawowe. Ocenę dopuszczającą powinien otrzymać
Znaleźć wzór ogólny i zbadać istnienie granicy ciągu określonego rekurencyjnie:
 Ciągi rekurencyjne Zadanie 1 Znaleźć wzór ogólny i zbadać istnienie granicy ciągu określonego rekurencyjnie: w dwóch przypadkach: dla i, oraz dla i. Wskazówka Należy poszukiwać rozwiązania w postaci, gdzie
Ciągi rekurencyjne Zadanie 1 Znaleźć wzór ogólny i zbadać istnienie granicy ciągu określonego rekurencyjnie: w dwóch przypadkach: dla i, oraz dla i. Wskazówka Należy poszukiwać rozwiązania w postaci, gdzie
PLAN WYNIKOWY Z MATEMATYKI DLA KLASY II TECHNIKUM 5 - LETNIEGO
 Lp. I PLAN WYNIKOWY Z MATEMATYKI DLA KLASY II TECHNIKUM 5 - LETNIEGO Temat lekcji Umiejętności Podstawowe Ponadpodstawowe Funkcja kwadratowa Uczeń: Uczeń: 1 Wykres i własności funkcji y = ax 2. - narysuje
Lp. I PLAN WYNIKOWY Z MATEMATYKI DLA KLASY II TECHNIKUM 5 - LETNIEGO Temat lekcji Umiejętności Podstawowe Ponadpodstawowe Funkcja kwadratowa Uczeń: Uczeń: 1 Wykres i własności funkcji y = ax 2. - narysuje
Metody numeryczne w przykładach
 Metody numeryczne w przykładach Bartosz Ziemkiewicz Wydział Matematyki i Informatyki UMK, Toruń Regionalne Koło Matematyczne 8 kwietnia 2010 r. Bartosz Ziemkiewicz (WMiI UMK) Metody numeryczne w przykładach
Metody numeryczne w przykładach Bartosz Ziemkiewicz Wydział Matematyki i Informatyki UMK, Toruń Regionalne Koło Matematyczne 8 kwietnia 2010 r. Bartosz Ziemkiewicz (WMiI UMK) Metody numeryczne w przykładach
Geometria. Rozwiązania niektórych zadań z listy 2
 Geometria. Rozwiązania niektórych zadań z listy 2 Inne rozwiązanie zadania 2. (Wyznaczyć równanie stycznej do elipsy x 2 a 2 + y2 b 2 = 1 w dowolnym jej punkcie (x 0, y 0 ). ) Przypuśćmy, że krzywa na
Geometria. Rozwiązania niektórych zadań z listy 2 Inne rozwiązanie zadania 2. (Wyznaczyć równanie stycznej do elipsy x 2 a 2 + y2 b 2 = 1 w dowolnym jej punkcie (x 0, y 0 ). ) Przypuśćmy, że krzywa na
Metody Numeryczne Wykład 4 Wykład 5. Interpolacja wielomianowa
 Sformułowanie zadania interpolacji Metody Numeryczne Wykład 4 Wykład 5 Interpolacja wielomianowa Niech D R i niech F bȩdzie pewnym zbiorem funkcji f : D R. Niech x 0, x 1,..., x n bȩdzie ustalonym zbiorem
Sformułowanie zadania interpolacji Metody Numeryczne Wykład 4 Wykład 5 Interpolacja wielomianowa Niech D R i niech F bȩdzie pewnym zbiorem funkcji f : D R. Niech x 0, x 1,..., x n bȩdzie ustalonym zbiorem
Wymagania edukacyjne z matematyki w XVIII Liceum Ogólnokształcącym w Krakowie, zakres podstawowy. Klasa druga.
 Wymagania edukacyjne z matematyki w XVIII Liceum Ogólnokształcącym w Krakowie, zakres podstawowy. Klasa druga. Funkcja liniowa. Uczeń otrzymuje ocenę dopuszczającą, jeśli: - rozpoznaje funkcję liniową
Wymagania edukacyjne z matematyki w XVIII Liceum Ogólnokształcącym w Krakowie, zakres podstawowy. Klasa druga. Funkcja liniowa. Uczeń otrzymuje ocenę dopuszczającą, jeśli: - rozpoznaje funkcję liniową
Całkowanie numeryczne przy użyciu kwadratur
 Całkowanie numeryczne przy użyciu kwadratur Plan wykładu: 1. Kwadratury Newtona-Cotesa a) wzory: trapezów, parabol etc. b) kwadratury złożone 2. Ekstrapolacja a) ekstrapolacja Richardsona b) metoda Romberga
Całkowanie numeryczne przy użyciu kwadratur Plan wykładu: 1. Kwadratury Newtona-Cotesa a) wzory: trapezów, parabol etc. b) kwadratury złożone 2. Ekstrapolacja a) ekstrapolacja Richardsona b) metoda Romberga
Za pierwszy niebanalny algorytm uważa się algorytm Euklidesa wyszukiwanie NWD dwóch liczb (400 a 300 rok przed narodzeniem Chrystusa).
.") Algorytmy definicja, cechy, złożoność. Algorytmy napotykamy wszędzie, gdziekolwiek się zwrócimy. Rządzą one wieloma codziennymi czynnościami, jak np. wymiana przedziurawionej dętki, montowanie szafy z
Algorytmy definicja, cechy, złożoność. Algorytmy napotykamy wszędzie, gdziekolwiek się zwrócimy. Rządzą one wieloma codziennymi czynnościami, jak np. wymiana przedziurawionej dętki, montowanie szafy z
MECHANIKA 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
Zadanie 1. Zmiana systemów. Zadanie 2. Szyfr Cezara. Zadanie 3. Czy liczba jest doskonała. Zadanie 4. Rozkład liczby na czynniki pierwsze Zadanie 5.
 Zadanie 1. Zmiana systemów. Zadanie 2. Szyfr Cezara. Zadanie 3. Czy liczba jest doskonała. Zadanie 4. Rozkład liczby na czynniki pierwsze Zadanie 5. Schemat Hornera. Wyjaśnienie: Zadanie 1. Pozycyjne reprezentacje
Zadanie 1. Zmiana systemów. Zadanie 2. Szyfr Cezara. Zadanie 3. Czy liczba jest doskonała. Zadanie 4. Rozkład liczby na czynniki pierwsze Zadanie 5. Schemat Hornera. Wyjaśnienie: Zadanie 1. Pozycyjne reprezentacje
Krzywa uniwersalna Sierpińskiego
 Krzywa uniwersalna Sierpińskiego Małgorzata Blaszke Karol Grzyb Streszczenie W niniejszej pracy omówimy krzywą uniwersalną Sierpińskiego, zwaną również dywanem Sierpińskiego. Pokażemy klasyczną metodę
Krzywa uniwersalna Sierpińskiego Małgorzata Blaszke Karol Grzyb Streszczenie W niniejszej pracy omówimy krzywą uniwersalną Sierpińskiego, zwaną również dywanem Sierpińskiego. Pokażemy klasyczną metodę
Algebra liniowa z geometrią
 Algebra liniowa z geometrią Maciej Czarnecki 15 stycznia 2013 Spis treści 1 Geometria płaszczyzny 2 1.1 Wektory i skalary........................... 2 1.2 Macierze, wyznaczniki, układy równań liniowych.........
Algebra liniowa z geometrią Maciej Czarnecki 15 stycznia 2013 Spis treści 1 Geometria płaszczyzny 2 1.1 Wektory i skalary........................... 2 1.2 Macierze, wyznaczniki, układy równań liniowych.........
Kolejny krok iteracji polega na tym, że przechodzimy do następnego wierzchołka, znajdującego się na jednej krawędzi z odnalezionym już punktem, w
 Metoda Simpleks Jak wiadomo, problem PL z dowolną liczbą zmiennych można rozwiązać wyznaczając wszystkie wierzchołkowe punkty wielościanu wypukłego, a następnie porównując wartości funkcji celu w tych
Metoda Simpleks Jak wiadomo, problem PL z dowolną liczbą zmiennych można rozwiązać wyznaczając wszystkie wierzchołkowe punkty wielościanu wypukłego, a następnie porównując wartości funkcji celu w tych
9. Podstawowe narzędzia matematyczne analiz przestrzennych
 Waldemar Izdebski - Wykłady z przedmiotu SIT 75 9. odstawowe narzędzia matematyczne analiz przestrzennych Niniejszy rozdział służy ogólnemu przedstawieniu metod matematycznych wykorzystywanych w zagadnieniu
Waldemar Izdebski - Wykłady z przedmiotu SIT 75 9. odstawowe narzędzia matematyczne analiz przestrzennych Niniejszy rozdział służy ogólnemu przedstawieniu metod matematycznych wykorzystywanych w zagadnieniu
WYKŁAD 3 WYPEŁNIANIE OBSZARÓW. Plan wykładu: 1. Wypełnianie wieloboku
 WYKŁ 3 WYPŁNINI OSZRÓW. Wypełnianie wieloboku Zasada parzystości: Prosta, która nie przechodzi przez wierzchołek przecina wielobok parzystą ilość razy. Plan wykładu: Wypełnianie wieloboku Wypełnianie konturu
WYKŁ 3 WYPŁNINI OSZRÓW. Wypełnianie wieloboku Zasada parzystości: Prosta, która nie przechodzi przez wierzchołek przecina wielobok parzystą ilość razy. Plan wykładu: Wypełnianie wieloboku Wypełnianie konturu
Propozycja szczegółowego rozkładu materiału dla 4-letniego technikum, zakres podstawowy i rozszerzony. Klasa I (90 h)
") Propozycja szczegółowego rozkładu materiału dla 4-letniego technikum, zakres podstawowy i rozszerzony (według podręczników z serii MATeMAtyka) Klasa I (90 h) Temat Liczba godzin 1. Liczby rzeczywiste 15
Propozycja szczegółowego rozkładu materiału dla 4-letniego technikum, zakres podstawowy i rozszerzony (według podręczników z serii MATeMAtyka) Klasa I (90 h) Temat Liczba godzin 1. Liczby rzeczywiste 15
Mathcad c.d. - Macierze, wykresy 3D, rozwiązywanie równań, pochodne i całki, animacje
 Mathcad c.d. - Macierze, wykresy 3D, rozwiązywanie równań, pochodne i całki, animacje Opracował: Zbigniew Rudnicki Powtórka z poprzedniego wykładu 2 1 Dokument, regiony, klawisze: Dokument Mathcada realizuje
Mathcad c.d. - Macierze, wykresy 3D, rozwiązywanie równań, pochodne i całki, animacje Opracował: Zbigniew Rudnicki Powtórka z poprzedniego wykładu 2 1 Dokument, regiony, klawisze: Dokument Mathcada realizuje
Zagadnienia na egzamin poprawkowy z matematyki - klasa I 1. Liczby rzeczywiste
 Zagadnienia na egzamin poprawkowy z matematyki - klasa I 1. Liczby rzeczywiste Liczby naturalne Liczby całkowite. Liczby wymierne Liczby niewymierne Rozwinięcie dziesiętne liczby rzeczywistej Pierwiastek
Zagadnienia na egzamin poprawkowy z matematyki - klasa I 1. Liczby rzeczywiste Liczby naturalne Liczby całkowite. Liczby wymierne Liczby niewymierne Rozwinięcie dziesiętne liczby rzeczywistej Pierwiastek
WYMAGANIA EDUKACYJNE Z MATEMATYKI 2016/2017 (zakres podstawowy) klasa 3abc
 klasa 3abc") WYMAGANIA EDUKACYJNE Z MATEMATYKI 2016/2017 (zakres podstawowy) klasa 3abc 1, Ciągi zna definicję ciągu (ciągu liczbowego); potrafi wyznaczyć dowolny wyraz ciągu liczbowego określonego wzorem ogólnym;
WYMAGANIA EDUKACYJNE Z MATEMATYKI 2016/2017 (zakres podstawowy) klasa 3abc 1, Ciągi zna definicję ciągu (ciągu liczbowego); potrafi wyznaczyć dowolny wyraz ciągu liczbowego określonego wzorem ogólnym;
Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych
 inż. Marek Duczkowski Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych słowa kluczowe: algorytm gradientowy, optymalizacja, określanie wodnicy W artykule
inż. Marek Duczkowski Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych słowa kluczowe: algorytm gradientowy, optymalizacja, określanie wodnicy W artykule
Oświetlenie. Modelowanie oświetlenia sceny 3D. Algorytmy cieniowania.
 Oświetlenie. Modelowanie oświetlenia sceny 3D. Algorytmy cieniowania. Chcąc osiągnąć realizm renderowanego obrazu, należy rozwiązać problem świetlenia. Barwy, faktury i inne właściwości przedmiotów postrzegamy
Oświetlenie. Modelowanie oświetlenia sceny 3D. Algorytmy cieniowania. Chcąc osiągnąć realizm renderowanego obrazu, należy rozwiązać problem świetlenia. Barwy, faktury i inne właściwości przedmiotów postrzegamy
Całkowanie numeryczne
 Całkowanie numeryczne Poniżej omówione zostanie kilka metod przybliżania operacji całkowania i różniczkowania w szczególności uzależnieniu pochodnej od jej różnic skończonych gdy równanie różniczkowe mamy
Całkowanie numeryczne Poniżej omówione zostanie kilka metod przybliżania operacji całkowania i różniczkowania w szczególności uzależnieniu pochodnej od jej różnic skończonych gdy równanie różniczkowe mamy
Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych klasa druga zakres rozszerzony
 Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych klasa druga zakres rozszerzony Wymagania konieczne (K) dotyczą zagadnień elementarnych, stanowiących swego rodzaju podstawę, zatem
Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych klasa druga zakres rozszerzony Wymagania konieczne (K) dotyczą zagadnień elementarnych, stanowiących swego rodzaju podstawę, zatem
Modelowanie i wstęp do druku 3D Wykład 1. Robert Banasiak
 Modelowanie i wstęp do druku 3D Wykład 1 Robert Banasiak Od modelu 3D do wydruku 3D Typowa droga...czasem wyboista... Pomysł!! Modeler 3D Przygotowanie modelu do druku Konfiguracja Programu do drukowania
Modelowanie i wstęp do druku 3D Wykład 1 Robert Banasiak Od modelu 3D do wydruku 3D Typowa droga...czasem wyboista... Pomysł!! Modeler 3D Przygotowanie modelu do druku Konfiguracja Programu do drukowania
Sponsorem wydruku schematu odpowiedzi jest wydawnictwo
 Kujawsko-Pomorskie Centrum Edukacji Nauczycieli w Bydgoszczy PLACÓWKA AKREDYTOWANA Sponsorem wydruku schematu odpowiedzi jest wydawnictwo KRYTERIA OCENIANIA POZIOM ROZSZERZONY Katalog zadań poziom rozszerzony
Kujawsko-Pomorskie Centrum Edukacji Nauczycieli w Bydgoszczy PLACÓWKA AKREDYTOWANA Sponsorem wydruku schematu odpowiedzi jest wydawnictwo KRYTERIA OCENIANIA POZIOM ROZSZERZONY Katalog zadań poziom rozszerzony
Jolanta Pająk Wymagania edukacyjne matematyka w zakresie rozszerzonym w klasie 2f 2018/2019r.
 Jolanta Pająk Wymagania edukacyjne matematyka w zakresie rozszerzonym w klasie 2f 2018/2019r. Ocena dopuszczająca: Temat lekcji Stopień i współczynniki wielomianu Dodawanie i odejmowanie wielomianów Mnożenie
Jolanta Pająk Wymagania edukacyjne matematyka w zakresie rozszerzonym w klasie 2f 2018/2019r. Ocena dopuszczająca: Temat lekcji Stopień i współczynniki wielomianu Dodawanie i odejmowanie wielomianów Mnożenie
RÓWNANIA RÓŻNICZKOWE WYKŁAD 15
 RÓWNANIA RÓŻNICZKOWE WYKŁAD 15 Niech r ( t ) [ x( t), y( t), z( t)], t I ( r ( t ) x( t) i y( t) j z( t) k, t I ) będzie równaniem wektorowym krzywej w R 3. Definicja Krzywą o równaniu r ( t ) [ a cost,
RÓWNANIA RÓŻNICZKOWE WYKŁAD 15 Niech r ( t ) [ x( t), y( t), z( t)], t I ( r ( t ) x( t) i y( t) j z( t) k, t I ) będzie równaniem wektorowym krzywej w R 3. Definicja Krzywą o równaniu r ( t ) [ a cost,
ANALIZA MATEMATYCZNA
 ANALIZA MATEMATYCZNA TABLICE Spis treści: 1.) Pochodne wzory 2 2.) Całki wzory 3 3.) Kryteria zbieżności szeregów 4 4.) Przybliżona wartość wyrażenia 5 5.) Równanie płaszczyzny stycznej i prostej normalnej
ANALIZA MATEMATYCZNA TABLICE Spis treści: 1.) Pochodne wzory 2 2.) Całki wzory 3 3.) Kryteria zbieżności szeregów 4 4.) Przybliżona wartość wyrażenia 5 5.) Równanie płaszczyzny stycznej i prostej normalnej
2. ZASTOSOWANIA POCHODNYCH. (a) f(x) = ln 3 x ln x, (b) f(x) = e2x x 2 2.
 f(x) = ln 3 x ln x, (b) f(x) = e2x x 2 2.") 2. ZASTOSOWANIA POCHODNYCH. Koniecznie trzeba znać: twierdzenia o ekstremach (z wykorzystaniem pierwszej i drugiej pochodnej), Twierdzenie Lagrange a, Twierdzenie Taylora (z resztą w postaci Peano, Lagrange
2. ZASTOSOWANIA POCHODNYCH. Koniecznie trzeba znać: twierdzenia o ekstremach (z wykorzystaniem pierwszej i drugiej pochodnej), Twierdzenie Lagrange a, Twierdzenie Taylora (z resztą w postaci Peano, Lagrange
METODY NUMERYCZNE. Wykład 3. Plan. Aproksymacja Interpolacja wielomianowa Przykłady. dr hab.inż. Katarzyna Zakrzewska, prof.agh. Met.Numer.
 METODY NUMERYCZNE Wykład 3. dr hab.inż. Katarzyna Zakrzewska, prof.agh Met.Numer. wykład 3 1 Plan Aproksymacja Interpolacja wielomianowa Przykłady Met.Numer. wykład 3 2 1 Aproksymacja Metody numeryczne
METODY NUMERYCZNE Wykład 3. dr hab.inż. Katarzyna Zakrzewska, prof.agh Met.Numer. wykład 3 1 Plan Aproksymacja Interpolacja wielomianowa Przykłady Met.Numer. wykład 3 2 1 Aproksymacja Metody numeryczne
Grafika Komputerowa Wykład 6. Teksturowanie. mgr inż. Michał Chwesiuk 1/23
 Wykład 6 mgr inż. 1/23 jest to technika w grafice komputerowej, której celem jest zwiększenie szczegółowości renderowanych powierzchni za pomocą tekstur. jest to pewna funkcja (najczęściej w formie bitmapy)
Wykład 6 mgr inż. 1/23 jest to technika w grafice komputerowej, której celem jest zwiększenie szczegółowości renderowanych powierzchni za pomocą tekstur. jest to pewna funkcja (najczęściej w formie bitmapy)
Wymagania edukacyjne z matematyki - klasa III (poziom rozszerzony) wg programu nauczania Matematyka Prosto do matury
 wg programu nauczania Matematyka Prosto do matury") STEREOMETRIA Wymagania edukacyjne z matematyki - klasa III (poziom rozszerzony) wskazać płaszczyzny równoległe i prostopadłe do danej płaszczyzny wskazać proste równoległe i prostopadłe do danej płaszczyzny
STEREOMETRIA Wymagania edukacyjne z matematyki - klasa III (poziom rozszerzony) wskazać płaszczyzny równoległe i prostopadłe do danej płaszczyzny wskazać proste równoległe i prostopadłe do danej płaszczyzny
Metody iteracyjne rozwiązywania układów równań liniowych (5.3) Normy wektorów i macierzy (5.3.1) Niech. x i. i =1
 Normy wektorów i macierzy (5.3.1) Niech. x i. i =1") Normy wektorów i macierzy (5.3.1) Niech 1 X =[x x Y y =[y1 x n], oznaczają wektory przestrzeni R n, a yn] niech oznacza liczbę rzeczywistą. Wyrażenie x i p 5.3.1.a X p = p n i =1 nosi nazwę p-tej normy
Normy wektorów i macierzy (5.3.1) Niech 1 X =[x x Y y =[y1 x n], oznaczają wektory przestrzeni R n, a yn] niech oznacza liczbę rzeczywistą. Wyrażenie x i p 5.3.1.a X p = p n i =1 nosi nazwę p-tej normy
Definicje i przykłady
 Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Układy równań i nierówności liniowych
 Układy równań i nierówności liniowych Wiesław Krakowiak 1 grudnia 2010 1 Układy równań liniowych DEFINICJA 11 Układem równań m liniowych o n niewiadomych X 1,, X n, nazywamy układ postaci: a 11 X 1 + +
Układy równań i nierówności liniowych Wiesław Krakowiak 1 grudnia 2010 1 Układy równań liniowych DEFINICJA 11 Układem równań m liniowych o n niewiadomych X 1,, X n, nazywamy układ postaci: a 11 X 1 + +
Pojęcie funkcji. Funkcja liniowa
 Pojęcie funkcji. Funkcja liniowa dr Mariusz Grzadziel Katedra Matematyki, Uniwersytet Przyrodniczy we Wrocławiu Wykład 2; rok akademicki 2016/2017 Zależności funkcyjne w naukach przyrodniczych Rozwój algebry
Pojęcie funkcji. Funkcja liniowa dr Mariusz Grzadziel Katedra Matematyki, Uniwersytet Przyrodniczy we Wrocławiu Wykład 2; rok akademicki 2016/2017 Zależności funkcyjne w naukach przyrodniczych Rozwój algebry
PDM 3 zakres podstawowy i rozszerzony PSO
 PDM 3 zakres podstawowy i rozszerzony PSO STEREOMETRIA wskazać płaszczyzny równoległe i prostopadłe do danej płaszczyzny wskazać proste równoległe i prostopadłe do danej płaszczyzny odróżnić proste równoległe
PDM 3 zakres podstawowy i rozszerzony PSO STEREOMETRIA wskazać płaszczyzny równoległe i prostopadłe do danej płaszczyzny wskazać proste równoległe i prostopadłe do danej płaszczyzny odróżnić proste równoległe
Matematyka do liceów i techników Szczegółowy rozkład materiału Zakres podstawowy
 Matematyka do liceów i techników Szczegółowy rozkład materiału Zakres podstawowy Wariant nr (klasa I 4 godz., klasa II godz., klasa III godz.) Klasa I 7 tygodni 4 godziny = 48 godzin Lp. Tematyka zajęć
Matematyka do liceów i techników Szczegółowy rozkład materiału Zakres podstawowy Wariant nr (klasa I 4 godz., klasa II godz., klasa III godz.) Klasa I 7 tygodni 4 godziny = 48 godzin Lp. Tematyka zajęć
VII. WYKRESY Wprowadzenie
 VII. WYKRESY 7.1. Wprowadzenie Wykres jest graficznym przedstawieniem (w pewnym układzie współrzędnych) zależności pomiędzy określonymi wielkościami. Ułatwia on interpretację informacji (danych) liczbowych.
VII. WYKRESY 7.1. Wprowadzenie Wykres jest graficznym przedstawieniem (w pewnym układzie współrzędnych) zależności pomiędzy określonymi wielkościami. Ułatwia on interpretację informacji (danych) liczbowych.
SPOSOBY POMIARU KĄTÓW W PROGRAMIE AutoCAD
 Dr inż. Jacek WARCHULSKI Dr inż. Marcin WARCHULSKI Mgr inż. Witold BUŻANTOWICZ Wojskowa Akademia Techniczna SPOSOBY POMIARU KĄTÓW W PROGRAMIE AutoCAD Streszczenie: W referacie przedstawiono możliwości
Dr inż. Jacek WARCHULSKI Dr inż. Marcin WARCHULSKI Mgr inż. Witold BUŻANTOWICZ Wojskowa Akademia Techniczna SPOSOBY POMIARU KĄTÓW W PROGRAMIE AutoCAD Streszczenie: W referacie przedstawiono możliwości
Zaawansowane metody numeryczne
 Wykład 10 Rozkład LU i rozwiązywanie układów równań liniowych Niech będzie dany układ równań liniowych postaci Ax = b Załóżmy, że istnieją macierze L (trójkątna dolna) i U (trójkątna górna), takie że macierz
Wykład 10 Rozkład LU i rozwiązywanie układów równań liniowych Niech będzie dany układ równań liniowych postaci Ax = b Załóżmy, że istnieją macierze L (trójkątna dolna) i U (trójkątna górna), takie że macierz
MATeMAtyka 3. Propozycja przedmiotowego systemu oceniania wraz z określeniem wymagań edukacyjnych. Zakres podstawowy i rozszerzony
 Agnieszka Kamińska, Dorota Ponczek MATeMAtyka 3 Propozycja przedmiotowego systemu oceniania wraz z określeniem wymagań edukacyjnych Zakres podstawowy i rozszerzony Wyróżnione zostały następujące wymagania
Agnieszka Kamińska, Dorota Ponczek MATeMAtyka 3 Propozycja przedmiotowego systemu oceniania wraz z określeniem wymagań edukacyjnych Zakres podstawowy i rozszerzony Wyróżnione zostały następujące wymagania
5. Rozwiązywanie układów równań liniowych
 5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
Algebra Boole a i jej zastosowania
 lgebra oole a i jej zastosowania Wprowadzenie Niech dany będzie zbiór dwuelementowy, którego elementy oznaczymy symbolami 0 oraz 1, tj. {0, 1}. W zbiorze tym określamy działania sumy :, iloczynu : _ oraz
lgebra oole a i jej zastosowania Wprowadzenie Niech dany będzie zbiór dwuelementowy, którego elementy oznaczymy symbolami 0 oraz 1, tj. {0, 1}. W zbiorze tym określamy działania sumy :, iloczynu : _ oraz
Rachunek wektorowy - wprowadzenie. dr inż. Romuald Kędzierski
 Rachunek wektorowy - wprowadzenie dr inż. Romuald Kędzierski Graficzne przedstawianie wielkości wektorowych Długość wektora jest miarą jego wartości Linia prosta wyznaczająca kierunek działania wektora
Rachunek wektorowy - wprowadzenie dr inż. Romuald Kędzierski Graficzne przedstawianie wielkości wektorowych Długość wektora jest miarą jego wartości Linia prosta wyznaczająca kierunek działania wektora
Ekstrema globalne funkcji
 SIMR 2013/14, Analiza 1, wykład 9, 2013-12-13 Ekstrema globalne funkcji Definicja: Funkcja f : D R ma w punkcie x 0 D minimum globalne wtedy i tylko (x D) f(x) f(x 0 ). Wartość f(x 0 ) nazywamy wartością
SIMR 2013/14, Analiza 1, wykład 9, 2013-12-13 Ekstrema globalne funkcji Definicja: Funkcja f : D R ma w punkcie x 0 D minimum globalne wtedy i tylko (x D) f(x) f(x 0 ). Wartość f(x 0 ) nazywamy wartością
XII Olimpiada Matematyczna Juniorów Zawody stopnia pierwszego część korespondencyjna (1 września 2016 r. 17 października 2016 r.)
") XII Olimpiada Matematyczna Juniorów Zawody stopnia pierwszego część korespondencyjna ( września 06 r. 7 października 06 r.) Szkice rozwiązań zadań konkursowych. Liczby wymierne a, b, c spełniają równanie
XII Olimpiada Matematyczna Juniorów Zawody stopnia pierwszego część korespondencyjna ( września 06 r. 7 października 06 r.) Szkice rozwiązań zadań konkursowych. Liczby wymierne a, b, c spełniają równanie
LI Olimpiada Matematyczna Rozwiązania zadań konkursowych zawodów stopnia trzeciego 3 kwietnia 2000 r. (pierwszy dzień zawodów)
") LI Olimpiada Matematyczna Rozwiązania zadań konkursowych zawodów stopnia trzeciego 3 kwietnia 2000 r. (pierwszy dzień zawodów) Zadanie 1. Dana jest liczba całkowita n 2. Wyznaczyć liczbę rozwiązań (x 1,x
LI Olimpiada Matematyczna Rozwiązania zadań konkursowych zawodów stopnia trzeciego 3 kwietnia 2000 r. (pierwszy dzień zawodów) Zadanie 1. Dana jest liczba całkowita n 2. Wyznaczyć liczbę rozwiązań (x 1,x
24. CAŁKA POWIERZCHNIOWA ZORIENTOWANA
 4. CAŁA POWIERZCHNIOWA ZORIENTOWANA Płat powierzchniowy gładki o równaniach parametrycznych: x = x( u, v ), y = y( u, v ), z = z( u, v ),, (u,v) w którym rozróżniamy dwie jego stron dodatnią i ujemną.
4. CAŁA POWIERZCHNIOWA ZORIENTOWANA Płat powierzchniowy gładki o równaniach parametrycznych: x = x( u, v ), y = y( u, v ), z = z( u, v ),, (u,v) w którym rozróżniamy dwie jego stron dodatnią i ujemną.
Wymagania edukacyjne z matematyki w klasie III A LP
 Wymagania edukacyjne z matematyki w klasie III A LP Zakres rozszerzony Kryteria Znajomość pojęć, definicji, własności oraz wzorów objętych programem nauczania. Umiejętność zastosowania wiedzy teoretycznej
Wymagania edukacyjne z matematyki w klasie III A LP Zakres rozszerzony Kryteria Znajomość pojęć, definicji, własności oraz wzorów objętych programem nauczania. Umiejętność zastosowania wiedzy teoretycznej
PDM 3. Zakres podstawowy i rozszerzony. Plan wynikowy. STEREOMETRIA (22 godz.) W zakresie TREŚCI PODSTAWOWYCH uczeń potrafi:
 W zakresie TREŚCI PODSTAWOWYCH uczeń potrafi:") PDM 3 Zakres podstawowy i rozszerzony Plan wynikowy STEREOMETRIA ( godz.) Proste i płaszczyzny w przestrzeni Kąt nachylenia prostej do płaszczyzny wskazać płaszczyzny równoległe i płaszczyzny prostopadłe
PDM 3 Zakres podstawowy i rozszerzony Plan wynikowy STEREOMETRIA ( godz.) Proste i płaszczyzny w przestrzeni Kąt nachylenia prostej do płaszczyzny wskazać płaszczyzny równoległe i płaszczyzny prostopadłe