Języki Modelowania i Symulacji
|
|
|
- Angelika Kaźmierczak
- 8 lat temu
- Przeglądów:
Transkrypt
1 Języki Modelowania i Symulacji Projektowanie sterowników Marcin Ciołek Katedra Systemów Automatyki WETI, Politechnika Gdańska 4 stycznia 212
2 O czym będziemy mówili? 1 2 3
3 rlocus Wyznaczanie trajektorii linii pierwiastkowych ukladu zamkniętego na podstawie układu otwartego. Jak wpływa zmiana wartości wzmocnienia k (, ) na położenie biegunów w przestrzeni zepolonej s dla układu zamkniętego z ujemnym sprzężeniem zwrotnym?
4 rlocus Root Locus Imaginary Axis Real Axis G = zpk([-1],[ -2],1) Zero/pole/gain: (s+1) s (s+2) rlocus(g)
5 rlocus 15 1 Root Locus 5 Imaginary Axis Real Axis G = zpk([-2],[ -4],1) Zero/pole/gain: (s+2) s^2 (s+4) rlocus(g)
6 rlocus Root Locus.5 Imaginary Axis Real Axis G = zpk([-2],[-1-1],1) Zero/pole/gain: (s+2) (s+1)^2 rlocus(g)
7 rlocus Root Locus Imaginary Axis Real Axis G = zpk([],[ ],1); rlocus(g); k = rlocfind(g) k =
8 lead, lag typu: lead, lag wprowadzaja zmiany w charakterystykach częstotliwościowych układu otwartego. Stosujemy je, aby zwiększyć wydajność systemu (stabilność, szybsza odpowiedź układu, zmniejszenie błędu w stanie usatlonym) P Lead = s + a s + b, P Lag = a b a b ( ) s + b, a b s + a punkt przecięcia się asymptot bieguny zera σ = liczba biegunów liczba zer
9 lead.8 Nieskompensowany 8.74 Kompensacja Lead Imaginary Axis Imaginary Axis System: F Gain: 18.5 Pole: i Damping:.94 Overshoot (%):.132 Frequency (rad/sec): Real Axis Real Axis.1 G1 = zpk([],[-1-1 ],1)%Obiekt G2 = zpk([-2],[-8],1) %Lead F = series(g1,g2)
10 lead G1 = zpk([],[-1-1 ],1) G2 = zpk([-2],[-8],1) %obiekt % Lead Zero/pole/gain: Zero/pole/gain: 1 (s+2) (s+1)^2 (s+8) F = series(g1,g2) Zero/pole/gain: (s+2) (s+8) (s+1)^2 subplot(121) rlocus(g1) subplot(122) rlocus(f) sgrid
11 lead Gm = Inf db (at Inf rad/sec), Pm = -18 deg (at rad/sec) Gm = Inf, Pm = -18 deg (at Inf rad/sec) Magnitude (db) Bode Diagram - Obiekt G 1 (s) Bode Diagram Lead G 2 (s) Bode Diagram F(s) = G 1 (s)g 2 (s) Magnitude (db) Magnitude (db) Gm = Inf db (at Inf rad/sec), Pm = Inf Phase (deg) -9 Phase (deg) Phase (deg) Frequency (rad/sec) Frequency (rad/sec) Frequency (rad/sec)
12 lag 2 15 Nieskompensowany Kompensacja Lag Imaginary Axis 5-5 System: G1 Gain: 185 Pole: i Damping:.118 Overshoot (%): 96.4 Frequency (rad/sec): 3.73 Imaginary Axis System: F Gain: 41 Pole: i Damping:.368 Overshoot (%): Frequency (rad/sec): Real Axis Real Axis G1 = zpk([],[ i -1-4i],1) G2 = zpk([],[-1],1) F = series(g1,g2)
13 lag G1 = zpk([],[ i -1-4i],1) G2 = zpk([],[-1],1) %obiekt % Lag Zero/pole/gain: Zero/pole/gain: (s+1) (s+5) (s^2 + 2s + 17) (s+1) F = series(g1,g2) Zero/pole/gain: (s+1)^2 (s+5) (s^2 + 2s + 17) subplot(121) rlocus(g1) subplot(122) rlocus(f) sgrid
14 lag Magnitude (db) Phase (deg) Gm = 45.8 db (at 3.74 rad/sec), Pm = Inf Bode Diagram - Obiekt G 1 (s) 1 Frequency (rad/sec) Magnitude (db) Phase (deg) Gm = Inf, Pm = -18 deg (at rad/sec) Bode Diagram - Lag G 2 (s) Frequency (rad/sec) Magnitude (db) Phase (deg) Gm = 52.9 db (at 2.32 rad/sec), Pm = Inf Bode Diagram F(s) = G 1 (s)g 2 (s) 1 Frequency (rad/sec)
15 Przykład 1 Model głowicy odczytu/zapisu dla dysku twardego został opisany transmitancja: H =.5.1s 2 +.4s + 1 Zaprojektuj cyfrowy sterownik do precyzyjnego pozycjonowania głowicy odczytu/zapisu.
16 Przykład 1 Magnitude (db) Bode Diagram H Hd (dyskretyzacja) -2 Phase (deg) Frequency (rad/sec) J =.1; C =.4; K = 1; Ki =.5; num = Ki; den = [J C K]; H = tf(num,den) Ts =.5; Hd = c2d(h,ts,'zoh') bodeplot(h,'-',hd,'r--')
17 Przykład 1 Czy układ zamknięty jest stabilny? Bode Diagram Gm = 3.1 db (at 34.1 rad/sec), Pm = Inf Magnitude (db) Phase (deg) Frequency (rad/sec)
18 Przykład 1 Jaki jest współczynnik tłumienia?.1 Step Response.9 Hd (po dyskretyzacji).8.7 Amplitude Time (sec)
19 Przykład 1 Czy można sterować wzmocnieniem ujemnego sprzężenia zwrotnego w celu poprawy stabilności układu? 2.5 Root Locus Imaginary Axis Real Axis
20 Przykład 1 Co się stało z zapasem wzmocnienia i fazy? Bode Diagram - Kompensacja Lead 1 Bode Diagram - Kompensator Lead Magnitude (db) Magnitude (db) Phase (deg) Phase (deg) Frequency (rad/sec) Frequency (rad/sec)
21 Przykład 1 Co się stało z zapasem wzmocnienia i fazy? Bode Diagram - Kompensacja Lead Gm = 83.9 db (at 297 rad/sec), Pm = Inf Magnitude (db) Phase (deg) Frequency (rad/sec)
22 Przykład 1 Czy można sterować wzmocnieniem ujemnego sprzężenia zwrotnego w celu poprawy stabilności układu? 1.6π/T Root Locus.5π/T.4π/T.8.7π/T.1.3π/T.2.6.8π/T.3.4.2π/T Imaginary Axis π/T π/t π/t System: oloop Gain: 4.11e+3 Pole: i Damping:.779 Overshoot (%): 2.2 Frequency (rad/sec): 122.1π/T.9π/T.1π/T π/T.2π/T -.8.7π/T.3π/T.6π/T.4π/T -1.5π/T Real Axis
23 Przykład 1 Ile czasu potrzeba na spozycjonowanie głowicy? x 1-4 Step Response 2 System: cloop Final Value:.184 Amplitude System: cloop Rise Time (sec): Time (sec)
24 Przykład 1 Układ sterowania głowica zapisu/odczytu oloop = Hd * D olk = K * oloop; margin(olk)
25 Przykład 1 Kiedy układ zamknięty przestanie być stabilny? 5 Bode Diagram Gm = 11.6 db (at 297 rad/sec), Pm = 43.2 deg (at 16 rad/sec) Magnitude (db) -5 Phase (deg) Frequency (rad/sec)
26 Design Narzędzie MATLAB-a umożliwiajace łatwe zaprojektowanie kompensatora dla wybranego układu sisotool sisotool(plant) sisotool(plant,comp) sisotool(plant/g,comp/c,sensor/h,prefilt/f) G,C,H,F moga być tworzone za pomoca funkcji: ss,tf,zpk
27 Design
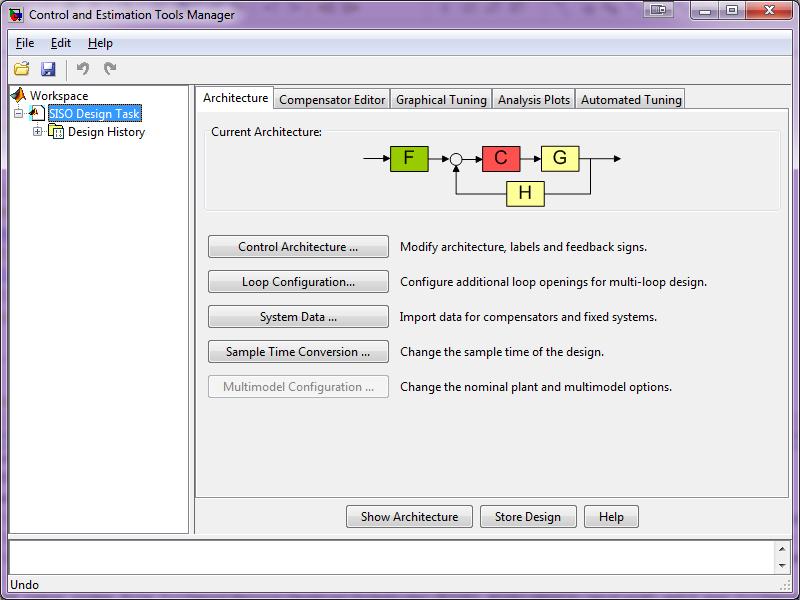
28 Design

29 Design Wyznacz obszar na płaszczyźnie s, w którym powinny znaleźć się bieguny układu II rzędu, aby spełnione były wymagania: maksymalne przeregulowanie M p% 15%, dwuprocentowy czas regulacji t 2% 4 sek, czas narastania t n 3 sek.

30 Ustawianie ograniczeń dla wybranych parametrów. Design

31 Design W efekcie przestrzeń zespolona zostaje ograniczona i można rozmieścić pierwiastki w białym obszarze.
32 Design Klikamy na Analysis Response to Step Command i przechodzimy do okna LTI Viewer. Czy układ II rzędu o zadanym rozmieszczeniu biegunów zespolonych spełnia wymagania projektowe: maksymalne przeregulowanie M p% 15%, dwuprocentowy czas regulacji t 2% 4 sek, czas narastania t n 3 sek.?.7 Step Response.6.5 System: Closed Loop r to u I/O: r to u Peak amplitude:.516 Overshoot (%): 6.27 At time (sec):.392 System: Closed Loop r to u I/O: r to u Settling Time (sec):.56 Amplitude.4.3 System: Closed Loop r to u I/O: r to u Rise Time (sec): Time (sec)
33 k (s+1)(s+3) Design Układ o transmitancji G(s) = objęto jednostkowym sprzężeniem zwrotnym. Dla jakich wartości k biegunami otrzymanego układu będa liczby rzeczywiste? G = zpk([],[-1-3],1); sisotool(g)
34 k (s+1)(s+3) Design Układ o transmitancji G(s) = objęto jednostkowym sprzężeniem zwrotnym. Dla jakich wartości k biegunami otrzymanego układu będa liczby rzeczywiste? G = zpk([],[-1-3],1); sisotool(g)
35 Design k Układ o transmitancji G(s) = objęto jednostkowym s(1s+1)(.1s+3) sprzężeniem zwrotnym. Dla jakich wartości k układ będzie na granicy stabilności? Odczytaj zapas fazy i wzmocnienia? G = zpk([],[ -.1-1],1); sisotool(g)
36 Design k Układ o transmitancji G(s) = objęto jednostkowym s(1s+1)(.1s+1) sprzężeniem zwrotnym. Dla jakich wartości k układ będzie na granicy stabilności? Odczytaj zapas fazy i wzmocnienia?
 Klikamy na Analysis Open-Loop Nyquist i przechodzimy do okna LTI Viewer.")
37 Design Wykreśl charakterystykę Nyquista dla układu o transmitancji G(s) =. Odczytaj zapas fazy i wzmocnienia? k s(1s+1)(.1s+1) Klikamy na Analysis Open-Loop Nyquist i przechodzimy do okna LTI Viewer. Następnie klikamy prawym przyciskiem myszy i ustawiamy: grid, zoom on ( 1, ), Characteristics All Stability Margins
38 Design - Przykład 2 Zaprojektuj sterownik proporcjonalny C(s) = K dla obiketu o transmitancji 1 G p(s) = używaj ac narzędzia : s(s+2)(s+5) znajdź przedział wartości wzmocnienia, dla którego układ zamkniety pozostaje stabilny wskaż wartość wzmocnienia, dla którego dominujace, zespolone bieguny sa tłumienie z wartościa ζ =.6 dla tej wartości wzmocnienia K odczytaj zapas fazy i wzmocnienia wyznacz odpowiedź skokowa układu zamkniętego dla uzyskanego K oraz odczytaj jej charakterystyczne parametry
;")
39 Design - Przykład 2 Gp = zpk([],[ -2-5],1); sisotool(gp)
40 Design - Przykład 2 Układ zamknięty pozostaje stabilny dla wartości wzmocnienie z przedziału K (, 7 >
41 Design - Przykład 2 Ustawiamy wartość wzmocnienie, dla którego dominujace, zespolone bieguny sa tłumienie z wartościa ζ =.6, K = 8.9

42 Design - Przykład 2 Ustawiamy wartość wzmocnienie, dla którego dominujace, zespolone bieguny sa tłumienie z wartościa ζ =.6, K = 8.9. Zapas wzmocnienia g = 17.9dB, zapas fazy p = 58.6deg.
43 Design - Przykład 2 Odpowiedź skokowa i jej charakterystyczne parametry. Step Response System: Closed Loop r to y I/O: r to y Peak amplitude: 1.9 Overshoot (%): 9.17 At time (sec): 3.29 System: Closed Loop r to y I/O: r to y Settling Time (sec): 4.85 Amplitude.8.6 System: Closed Loop r to y I/O: r to y Rise Time (sec): Time (sec)
44 Design - Przykład 3 Zaprojektuj sterownik PD C(s) = K p + K D s dla obiketu o transmitancji 1 G p(s) = używaj ac narzędzia : s(s+2)(s+5) wartość współczynnika tłumienia dla dominujacych, zespolonych biegunów wynosi ζ =.77 czas ustalania dla dominujacych, zespolonych biegunów wynosi t s = 2 sek t s 4τ τ =.5 sec ζω n = 1 τ = 1 = 2 θ = arccos(.77) = 45 deg.5 s 1,2 = ζω n ± jω n 1 ζ2 = 2 ± j2
45 Design - Przykład 3
46 Design - Przykład 3 wartość współczynnika tłumienia dla dominujacych, zespolonych biegunów wynosi ζ =.77 czas ustalania dla dominujacych, zespolonych biegunów wynosi t s = 2 sek
47 Design - Przykład 3 Umieszczamy zero na osi rzeczywistej na lewo od pary biegunów dominujacych.
48 Design - Przykład 3 Zmieniamy wartość wzmocnienia tak, aby bieguny znalazły się w punkcie przecięcia lini ograniczajacych. Następnie klikamy File Export, klikamy na nazwę C i zmieniamy ja na PD. Klikamy Export to Workspace. Wpisujac nazwę zmiennej w WorkSpace otrzymamy zaprojektowany regulator PD C(s) = 1 (s + 2.4)
49 Design - Przykład 3 Odpowiedź skokowa układu zamkniętego i jej charakterystyczne parametry 1.4 Step Response System: Closed Loop r to y I/O: r to y Peak amplitude: 1.7 Overshoot (%): 7.3 At time (sec): 1.4 System: Closed Loop r to y I/O: r to y Settling Time (sec): 2.13 Amplitude.8.6 System: Closed Loop r to y I/O: r to y Rise Time (sec): Time (sec)
50 Design - Przykład 4 Zaprojektuj kompensator typu Lead C(s) = 1 Kc (s+zo) (s+p o) dla obiketu o transmitancji G p(s) = używaj ac narzędzia : s(s+2)(s+5) wartość współczynnika tłumienia dla dominujacych, zespolonych biegunów wynosi ζ =.77 czas ustalania dla dominujacych, zespolonych biegunów wynosi t s = 2 sek t s 4τ τ =.5 sec ζω n = 1 τ = 1 = 2 θ = arccos(.77) = 45 deg.5 s 1,2 = ζω n ± jω n 1 ζ2 = 2 ± j2
51 Design - Przykład 4 Ustawiamy zero pomiędzy dwoma biegunami leżacymi najbliżej osi urojonej z o = Następnie ustawiamy biegun najdalej z pozostałych na osi rzeczywistej p o = 8. Zmieniamy wartość wzmocnienia tak, aby bieguny znalazły się w punkcie przecięcia lini ograniczajacych. C(s) = (s ) s + 8
52 Design - Przykład 4 Odpowiedź skokowa układu zamkniętego i jej charakterystyczne parametry Step Response Amplitude System: Closed Loop r to y I/O: r to y Settling Time (sec): 1.52 System: Closed Loop r to y I/O: r to y Rise Time (sec):.935 System: Closed Loop r to y I/O: r to y Peak amplitude: 1.1 Overshoot (%):.56 At time (sec): Time (sec)
53 Design - Przykład 4 Odpowiedzi skokowe układu zamkniętego i ich charakterystyczne parametry. P PD Lead Czas narastania [sek] Wartość przeregulowania [%] Czas ustalania [sek]
54 Design - Przykład 5 Zaprojektuj sterownik dla obiketu o transmitancji G(s) = 45 używajac s(s+361.2) narzędzia tak, aby po objęciu go jednostkowym sprzężeniem zwrotnym spełnione były wymagania: bład prędkościowy w stanie ustalonym (pobudzenie rampa z jednostkowym wzmocnieniem) e.443 maksymalne przeregulowanie M p% 5% czas narastania t n.2 sec czas ustalania t 5%.5 sec Porównaj zastosowanie steronika proporcjonalnego i kompensatora typu Lead
55 Design - Przykład 5 num=45; den=[ ]; G=tf(num,den); sisotool(g)

56 Design - Przykład 5 View Close-Loop poles...
57 Design - Przykład 5 Odpowiedź skokowa układu zamkniętego dla jednostkowego wzmocnienia, czy warunek dotyczacy czasu narastania jest spełniony? 1 Step Response.9.8 System: Closed Loop r to y I/O: r to y Rise Time (sec): Amplitude Time (sec)
58 Design - Przykład 5 Czy możemy znaleźć tak a wartość sterownika proporcjonalnego, aby wymagania projektowe zostały spełnione?
 (należy dodać odpowiednia wartość zera")
59 Design - Przykład 5 Można zastosować sterownik PD C(s) = K (1 + st D ) (należy dodać odpowiednia wartość zera )
60 Design - Przykład 5 Można zastosować sterownik PD C(s) = K (1 + st D ) (należy dodać odpowiednia wartość zera ). Dzięki temu pojawił się punkt rozejścia i bieguna moga znaleźć się w dozwolonym obszarze. C(s) = 295(1 +.1s)
61 Design - Przykład 5 Czy wymagania projektowe zostały spełnione? bład prędkościowy w stanie ustalonym (pobudzenie rampa z jednostkowym wzmocnieniem) e.443 maksymalne przeregulowanie M p% 5% czas narastania t n.2 sec czas ustalania t 5%.5 sec 1.4 Step Response System: Closed Loop r to y I/O: r to y Peak amplitude: 1.12 Overshoot (%): 11.9 At time (sec):.223 System: Closed Loop r to y I/O: r to y Settling Time (sec):.368 Amplitude.8.6 System: Closed Loop r to y I/O: r to y Rise Time (sec): Time (sec) x 1-3
62 Czy wymagania projektowe zostały spełnione? Design - Przykład 5 bład prędkościowy w stanie ustalonym (pobudzenie rampa z jednostkowym wzmocnieniem) e.443 maksymalne przeregulowanie M p% 5% czas narastania t n.2 sec czas ustalania t 5%.5 sec 45 k v = lim sg z(s) = lim sc(s)g(s) = lim s 295(1 +.1s) s s s s(s ) k v = e + 3 e v( ) = 1 k v e v( ) =.2729
Kompensacja wyprzedzająca i opóźniająca fazę. dr hab. inż. Krzysztof Patan, prof. PWSZ
 Kompensacja wyprzedzająca i opóźniająca fazę dr hab. inż. Krzysztof Patan, prof. PWSZ Kształtowanie charakterystyki częstotliwościowej Kształtujemy charakterystykę układu otwartego aby uzyskać: pożądane
Kompensacja wyprzedzająca i opóźniająca fazę dr hab. inż. Krzysztof Patan, prof. PWSZ Kształtowanie charakterystyki częstotliwościowej Kształtujemy charakterystykę układu otwartego aby uzyskać: pożądane
Projektowanie układów regulacji w dziedzinie częstotliwości. dr hab. inż. Krzysztof Patan, prof. PWSZ
 Projektowanie układów regulacji w dziedzinie częstotliwości dr hab. inż. Krzysztof Patan, prof. PWSZ Wprowadzenie Metody projektowania w dziedzinie częstotliwości mają wiele zalet: stabilność i wymagania
Projektowanie układów regulacji w dziedzinie częstotliwości dr hab. inż. Krzysztof Patan, prof. PWSZ Wprowadzenie Metody projektowania w dziedzinie częstotliwości mają wiele zalet: stabilność i wymagania
Technika regulacji automatycznej
 Technika regulacji automatycznej Wykład 3 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 32 Plan wykładu Wprowadzenie Układ pierwszego rzędu Układ drugiego
Technika regulacji automatycznej Wykład 3 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 32 Plan wykładu Wprowadzenie Układ pierwszego rzędu Układ drugiego
Technika regulacji automatycznej
 Technika regulacji automatycznej Wykład 5 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 38 Plan wykładu Kompensator wyprzedzający Kompensator opóźniający
Technika regulacji automatycznej Wykład 5 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 38 Plan wykładu Kompensator wyprzedzający Kompensator opóźniający
Automatyka i robotyka
 Automatyka i robotyka Wykład 8 - Regulator PID Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu regulator PID 2 z 29 Kompensator wyprzedzająco-opóźniający
Automatyka i robotyka Wykład 8 - Regulator PID Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu regulator PID 2 z 29 Kompensator wyprzedzająco-opóźniający
układu otwartego na płaszczyźnie zmiennej zespolonej. Sformułowane przez Nyquista kryterium stabilności przedstawia się następująco:
 Kryterium Nyquista Kryterium Nyquista pozwala na badanie stabilności jednowymiarowego układu zamkniętego na podstawie przebiegu wykresu funkcji G o ( jω) układu otwartego na płaszczyźnie zmiennej zespolonej.
Kryterium Nyquista Kryterium Nyquista pozwala na badanie stabilności jednowymiarowego układu zamkniętego na podstawie przebiegu wykresu funkcji G o ( jω) układu otwartego na płaszczyźnie zmiennej zespolonej.
Techniki regulacji automatycznej
 Techniki regulacji automatycznej Metoda linii pierwiastkowych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 25 Plan wykładu Podstawy metody linii pierwiastkowych
Techniki regulacji automatycznej Metoda linii pierwiastkowych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 25 Plan wykładu Podstawy metody linii pierwiastkowych
Podstawowe człony dynamiczne. dr hab. inż. Krzysztof Patan
 Podstawowe człony dynamiczne dr hab. inż. Krzysztof Patan Człon proporcjonalny Równanie w dziedzinie czasu Transmitancja y(t) = Ku(t) Y (s) = KU(s) G(s) = Y (s) U(S) = K Transmiancja widmowa G(s) = K G(jω)
Podstawowe człony dynamiczne dr hab. inż. Krzysztof Patan Człon proporcjonalny Równanie w dziedzinie czasu Transmitancja y(t) = Ku(t) Y (s) = KU(s) G(s) = Y (s) U(S) = K Transmiancja widmowa G(s) = K G(jω)
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 6. Badanie
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 6. Badanie
Laboratorium nr 3. Projektowanie układów automatyki z wykorzystaniem Matlaba i Simulinka
 Laboratorium nr 3. Cele ćwiczenia Projektowanie układów automatyki z wykorzystaniem Matlaba i Simulinka poznanie sposobów tworzenia liniowych modeli układów automatyki, zmiana postaci modeli, tworzenie
Laboratorium nr 3. Cele ćwiczenia Projektowanie układów automatyki z wykorzystaniem Matlaba i Simulinka poznanie sposobów tworzenia liniowych modeli układów automatyki, zmiana postaci modeli, tworzenie
Automatyka i robotyka
 Automatyka i robotyka Wykład 6 - Odpowiedź częstotliwościowa Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 37 Plan wykładu Wprowadzenie Podstawowe człony
Automatyka i robotyka Wykład 6 - Odpowiedź częstotliwościowa Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 37 Plan wykładu Wprowadzenie Podstawowe człony
Technika regulacji automatycznej
 Technika regulacji automatycznej Wykład 2 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 56 Plan wykładu Schematy strukturalne Podstawowe operacje na schematach
Technika regulacji automatycznej Wykład 2 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 56 Plan wykładu Schematy strukturalne Podstawowe operacje na schematach
Stabilność. Krzysztof Patan
 Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Opis matematyczny. Równanie modulatora. Charakterystyka statyczna. Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy. dla 0 v c.
 Opis matematyczny Równanie modulatora Charakterystyka statyczna d t = v c t V M dla 0 v c t V M D 1 V M V c Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy v c (t )=V c + v c (t ) d (t
Opis matematyczny Równanie modulatora Charakterystyka statyczna d t = v c t V M dla 0 v c t V M D 1 V M V c Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy v c (t )=V c + v c (t ) d (t
Badanie stabilności liniowych układów sterowania
 Badanie stabilności liniowych układów sterowania ver. 26.2-6 (26-2-7 4:6). Badanie stabilności liniowych układów sterowania poprzez analizę równania charakterystycznego. Układ zamknięty liniowy i stacjonarny
Badanie stabilności liniowych układów sterowania ver. 26.2-6 (26-2-7 4:6). Badanie stabilności liniowych układów sterowania poprzez analizę równania charakterystycznego. Układ zamknięty liniowy i stacjonarny
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 7. Metoda projektowania
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 7. Metoda projektowania
Języki Modelowania i Symulacji 2018 Podstawy Automatyki Wykład 4
 Języki Modelowania i Symulacji 2018 Podstawy Automatyki Wykład 4 dr inż. Marcin Ciołek Katedra Systemów Automatyki Wydział ETI, Politechnika Gdańska Języki Modelowania i Symulacji dr inż. Marcin Ciołek
Języki Modelowania i Symulacji 2018 Podstawy Automatyki Wykład 4 dr inż. Marcin Ciołek Katedra Systemów Automatyki Wydział ETI, Politechnika Gdańska Języki Modelowania i Symulacji dr inż. Marcin Ciołek
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Projektowanie układów metodą sprzężenia od stanu - metoda przemieszczania biegunów
 Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Laboratorium Sterowania Procesami Ciągłych Projektowanie układów metodą sprzężenia od stanu - metoda przemieszczania biegunów. Obliczanie
Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Laboratorium Sterowania Procesami Ciągłych Projektowanie układów metodą sprzężenia od stanu - metoda przemieszczania biegunów. Obliczanie
analogowego regulatora PID doboru jego nastaw i przetransformowanie go na cyfrowy regulator PID, postępując według następujących podpunktów:
 Cel projektu. Projekt składa się z dwóch podstawowych zadań, mających na celu zaprojektowanie dla danej transmitancji: G( s) = m 2 s 2 e + m s + sτ gdzie wartości m 2 = 27, m = 2, a τ = 4. G( s) = 27s
Cel projektu. Projekt składa się z dwóch podstawowych zadań, mających na celu zaprojektowanie dla danej transmitancji: G( s) = m 2 s 2 e + m s + sτ gdzie wartości m 2 = 27, m = 2, a τ = 4. G( s) = 27s
Część 1. Transmitancje i stabilność
 Część 1 Transmitancje i stabilność Zastosowanie opisu transmitancyjnego w projektowaniu przekształtników impulsowych Istotne jest przewidzenie wpływu zmian w warunkach pracy (m. in. v g, i) i wielkości
Część 1 Transmitancje i stabilność Zastosowanie opisu transmitancyjnego w projektowaniu przekształtników impulsowych Istotne jest przewidzenie wpływu zmian w warunkach pracy (m. in. v g, i) i wielkości
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Narzędzia wspomagające projektowanie - Matlab. PID Tunner. step, bode, margin, rlocus lqr, lqreg kalman,...
 Narzędzia wspomagające projektowanie - Matlab Obiekt LTI (Linear Time-Invariant System) Schemat pod Simulinkiem SCDesign linearyzacja SCOptimization linearyzacja Linear Analysis Tools LTI Viewer step,
Narzędzia wspomagające projektowanie - Matlab Obiekt LTI (Linear Time-Invariant System) Schemat pod Simulinkiem SCDesign linearyzacja SCOptimization linearyzacja Linear Analysis Tools LTI Viewer step,
( 1+ s 1)( 1+ s 2)( 1+ s 3)
( 1+ s 2)( 1+ s 3)") Kryteria stabilności przykład K T (s)= (s+1)(s+2)(s+3) = K /6 1 1+T (s) = (s+1)(s+2)(s+3) K +6+11s+6s 2 +s 3 ( 1+ s 1)( 1+ s 2)( 1+ s 3) Weźmy K =60: 1 1+T (s) =(s+1)(s+2)(s+3) 66+11s+6s 2 +s =(s+1)(s+2)(s+3)
Kryteria stabilności przykład K T (s)= (s+1)(s+2)(s+3) = K /6 1 1+T (s) = (s+1)(s+2)(s+3) K +6+11s+6s 2 +s 3 ( 1+ s 1)( 1+ s 2)( 1+ s 3) Weźmy K =60: 1 1+T (s) =(s+1)(s+2)(s+3) 66+11s+6s 2 +s =(s+1)(s+2)(s+3)
Narzędzia wspomagające projektowanie UR SISO Design. step, bode, margin, rlocus lqr, lqreg kalman,...
 Narzędzia wspomagające projektowanie UR SISO Design Obiekt LTI (Linear Time-Invariant System) Linear Analysis Tools LTI Viewer step, impluse bode, nyquist pool/zero map... Matlab+Control+... Schemat pod
Narzędzia wspomagające projektowanie UR SISO Design Obiekt LTI (Linear Time-Invariant System) Linear Analysis Tools LTI Viewer step, impluse bode, nyquist pool/zero map... Matlab+Control+... Schemat pod
Automatyka i sterowanie w gazownictwie. Regulatory w układach regulacji
 Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
4. UKŁADY II RZĘDU. STABILNOŚĆ. Podstawowe wzory. Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat. Transmitancja układu zamkniętego
 4. UKŁADY II RZĘDU. STABILNOŚĆ Podstawowe wzory Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat (4.1) Transmitancja układu zamkniętego częstotliwość naturalna współczynnik tłumienia Odpowiedź
4. UKŁADY II RZĘDU. STABILNOŚĆ Podstawowe wzory Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat (4.1) Transmitancja układu zamkniętego częstotliwość naturalna współczynnik tłumienia Odpowiedź
Analiza ustalonego punktu pracy dla układu zamkniętego
 Analiza ustalonego punktu pracy dla układu zamkniętego W tym przypadku oznacza stałą odchyłkę od ustalonego punktu pracy element SUM element DIFF napięcie odniesienia V ref napięcie uchybu V e V ref HV
Analiza ustalonego punktu pracy dla układu zamkniętego W tym przypadku oznacza stałą odchyłkę od ustalonego punktu pracy element SUM element DIFF napięcie odniesienia V ref napięcie uchybu V e V ref HV
Układ regulacji automatycznej (URA) kryteria stabilności
 kryteria stabilności") Układ regulacji automatycznej (URA) kryteria stabilności y o e G c (s) z z 2 u G o (s) y () = () ()() () H(s) oraz jego wartością w stanie ustalonym. Transmitancja układu otwartego regulacji: - () = ()
Układ regulacji automatycznej (URA) kryteria stabilności y o e G c (s) z z 2 u G o (s) y () = () ()() () H(s) oraz jego wartością w stanie ustalonym. Transmitancja układu otwartego regulacji: - () = ()
K p. K o G o (s) METODY DOBORU NASTAW Metoda linii pierwiastkowych Metody analityczne Metoda linii pierwiastkowych
 METODY DOBORU NASTAW Metoda linii pierwiastkowych Metody analityczne Metoda linii pierwiastkowych") METODY DOBORU NASTAW 7.3.. Metody analityczne 7.3.. Metoda linii pierwiastkowych 7.3.2 Metody doświadczalne 7.3.2.. Metoda Zieglera- Nicholsa 7.3.2.2. Wzmocnienie krytyczne 7.3.. Metoda linii pierwiastkowych
METODY DOBORU NASTAW 7.3.. Metody analityczne 7.3.. Metoda linii pierwiastkowych 7.3.2 Metody doświadczalne 7.3.2.. Metoda Zieglera- Nicholsa 7.3.2.2. Wzmocnienie krytyczne 7.3.. Metoda linii pierwiastkowych
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ. T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
 T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia") REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ Y o (s) - E(s) B(s) /T I s K p U(s) Z(s) G o (s) Y(s) T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ Y o (s) - E(s) B(s) /T I s K p U(s) Z(s) G o (s) Y(s) T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
PRZEMYSŁOWE UKŁADY STEROWANIA PID. Wykład 5 i 6. Michał Grochowski, dr inż. Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki PRZEMYSŁOWE UKŁADY STEROWANIA PID Wykład 5 i 6 Michał Grochowski, dr inż. Studia I stopnia inżynierskie, Semestr IV Charakterystyki częstotliwościowe
Politechnika Gdańska Wydział Elektrotechniki i Automatyki PRZEMYSŁOWE UKŁADY STEROWANIA PID Wykład 5 i 6 Michał Grochowski, dr inż. Studia I stopnia inżynierskie, Semestr IV Charakterystyki częstotliwościowe
Kompensator PID. 1 sω z 1 ω. G cm. aby nie zmienić częstotliwości odcięcia f L. =G c0. s =G cm. G c. f c. /10=500 Hz aby nie zmniejszyć zapasu fazy
 Kompensator PID G c s =G cm sω z ω L s s ω p G cm =G c0 aby nie zmienić częstotliwości odcięcia f L f c /0=500 Hz aby nie zmniejszyć zapasu fazy Łukasz Starzak, Sterowanie przekształtników elektronicznych,
Kompensator PID G c s =G cm sω z ω L s s ω p G cm =G c0 aby nie zmienić częstotliwości odcięcia f L f c /0=500 Hz aby nie zmniejszyć zapasu fazy Łukasz Starzak, Sterowanie przekształtników elektronicznych,
Inżynieria Systemów Dynamicznych (3)
") Inżynieria Systemów Dynamicznych (3) Charakterystyki podstawowych członów dynamicznych Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili?
Inżynieria Systemów Dynamicznych (3) Charakterystyki podstawowych członów dynamicznych Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili?
Inżynieria Systemów Dynamicznych (5)
") Inżynieria Systemów Dynamicznych (5) Dokładność Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 DOKŁAD 2 Uchyb Podstawowy strukturalny
Inżynieria Systemów Dynamicznych (5) Dokładność Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 DOKŁAD 2 Uchyb Podstawowy strukturalny
Kryterium miejsca geometrycznego pierwiastków
 7.5.3. Kryterium miejsca geometrycznego pierwiastków Wprowadzenie Miejsce geometryczne pierwiastków równania charakterystycznego układu zamkniętego (mgp) umożliwia między innymi wyznaczenie wymaganego
7.5.3. Kryterium miejsca geometrycznego pierwiastków Wprowadzenie Miejsce geometryczne pierwiastków równania charakterystycznego układu zamkniętego (mgp) umożliwia między innymi wyznaczenie wymaganego
Podstawy środowiska Matlab
 Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Laboratorium Automatyki i Robotyki Podstawy środowiska Matlab Poniżej przedstawione jest użycie podstawowych poleceń w środowisku
Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Laboratorium Automatyki i Robotyki Podstawy środowiska Matlab Poniżej przedstawione jest użycie podstawowych poleceń w środowisku
Komputerowo wspomagane projektowanie systemów sterowania
 Komputerowo wspomagane projektowanie systemów sterowania OCENA KOŃCOWA: F1 ocena z laboratorium (sprawozdania z ćwiczeń laboratoryjnych) F2 kolokwium pisemne z wykładu (dopuszczeniowe) F3 egzamin pisemny
Komputerowo wspomagane projektowanie systemów sterowania OCENA KOŃCOWA: F1 ocena z laboratorium (sprawozdania z ćwiczeń laboratoryjnych) F2 kolokwium pisemne z wykładu (dopuszczeniowe) F3 egzamin pisemny
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra InŜynierii Systemów Sterowania Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra InŜynierii Systemów Sterowania Podstawy Automatyki Stabilność systemów sterowania kryterium Nyquist a Materiały pomocnicze do ćwiczeń termin
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra InŜynierii Systemów Sterowania Podstawy Automatyki Stabilność systemów sterowania kryterium Nyquist a Materiały pomocnicze do ćwiczeń termin
4. Właściwości eksploatacyjne układów regulacji Wprowadzenie. Hs () Ys () Ws () Es () Go () s. Vs ()
 Ys () Ws () Es () Go () s. Vs ()") 4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
Ćwiczenie nr 6 Charakterystyki częstotliwościowe
 Wstęp teoretyczny Ćwiczenie nr 6 Charakterystyki częstotliwościowe 1 Cel ćwiczenia Celem ćwiczenia jest wyznaczenie charakterystyk częstotliwościowych układu regulacji oraz korekta nastaw regulatora na
Wstęp teoretyczny Ćwiczenie nr 6 Charakterystyki częstotliwościowe 1 Cel ćwiczenia Celem ćwiczenia jest wyznaczenie charakterystyk częstotliwościowych układu regulacji oraz korekta nastaw regulatora na
KOMPUTERY W STEROWANIU. Ćwiczenie 5 Projektowanie kompensatora cyfrowego metodą symulacji
 Wydział Elektryczny Zespół Automatyki (ZTMAiPC) KOMPUTERY W STEROWANIU Ćwiczenie 5 Projektowanie kompensatora cyfrowego metodą symulacji. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z metodami projektowania
Wydział Elektryczny Zespół Automatyki (ZTMAiPC) KOMPUTERY W STEROWANIU Ćwiczenie 5 Projektowanie kompensatora cyfrowego metodą symulacji. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z metodami projektowania
TEORIA STEROWANIA I, w 5. dr inż. Adam Woźniak ZTMiR MEiL PW
 TEORIA STEROWANIA I, w 5 dr inż. Adam Woźniak ZTMiR MEiL PW Układy LTI- SISO Stacjonarne, przyczynowe liniowe układy z jednym wyjściem i jednym wejściem najczęściej modeluje się przy pomocy właściwej transmitancji
TEORIA STEROWANIA I, w 5 dr inż. Adam Woźniak ZTMiR MEiL PW Układy LTI- SISO Stacjonarne, przyczynowe liniowe układy z jednym wyjściem i jednym wejściem najczęściej modeluje się przy pomocy właściwej transmitancji
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 2. REPREZENTACJA
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 2. REPREZENTACJA
Podstawowe człony dynamiczne
 . Człon proporcjonalny 2. Człony całkujący idealny 3. Człon inercyjny Podstawowe człony dynamiczne charakterystyki czasowe = = = + 4. Człony całkujący rzeczywisty () = + 5. Człon różniczkujący rzeczywisty
. Człon proporcjonalny 2. Człony całkujący idealny 3. Człon inercyjny Podstawowe człony dynamiczne charakterystyki czasowe = = = + 4. Człony całkujący rzeczywisty () = + 5. Człon różniczkujący rzeczywisty
Korekcja układów regulacji
 Korekcja układów regulacji Powszechnym sposobem wpływania na jakość procesów regulacji jest wprowadzenie urządzeń (członów) korekcyjnych. W przeważającej większości przypadków niezbędne jest umieszczenie
Korekcja układów regulacji Powszechnym sposobem wpływania na jakość procesów regulacji jest wprowadzenie urządzeń (członów) korekcyjnych. W przeważającej większości przypadków niezbędne jest umieszczenie
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Dobór typu regulatora i jego nastaw w procesie syntezy układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Robotyki
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Dobór typu regulatora i jego nastaw w procesie syntezy układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Robotyki mgr
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Dobór typu regulatora i jego nastaw w procesie syntezy układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Robotyki mgr
Ćwiczenie 6 Projektowanie filtrów cyfrowych o skończonej i nieskończonej odpowiedzi impulsowej
 Ćwiczenie 6 Projektowanie filtrów cyfrowych o skończonej i nieskończonej odpowiedzi impulsowej. Filtry FIR o skończonej odpowiedzi impulsowej (SOI) Filtracja FIR polega na tym, że sygnał wyjściowy powstaje
Ćwiczenie 6 Projektowanie filtrów cyfrowych o skończonej i nieskończonej odpowiedzi impulsowej. Filtry FIR o skończonej odpowiedzi impulsowej (SOI) Filtracja FIR polega na tym, że sygnał wyjściowy powstaje
Sterowanie przekształtników elektronicznych zima 2011/12
 Sterowanie przekształtników elektronicznych zima 2011/12 dr inż. Łukasz Starzak Politechnika Łódzka Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Katedra Mikroelektroniki i Technik Informatycznych
Sterowanie przekształtników elektronicznych zima 2011/12 dr inż. Łukasz Starzak Politechnika Łódzka Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Katedra Mikroelektroniki i Technik Informatycznych
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Dobór parametrów układu regulacji, Identyfikacja parametrów obiektów dynamicznych Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Dobór parametrów układu regulacji, Identyfikacja parametrów obiektów dynamicznych Kierunek studiów: Transport, Stacjonarne
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności obiektów automatyzacji, Wpływ sprzężenia zwrotnego na stabilność obiektów Kierunek studiów: Transport,
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności obiektów automatyzacji, Wpływ sprzężenia zwrotnego na stabilność obiektów Kierunek studiów: Transport,
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Transmitancja modelu, procesu i regulatora wykorzystana w badaniach. Rzeczywisty regulator PID. Transmitancja regulatora: = sti. Transmitancja modelu:
 1. Cel projektu. Zasymulować odpowiedź skokową procesu P(s). Na podstawie tej odpowiedzi skokowej, określić τ oraz T i wyznaczyć parametry modelu M(s), którego rodzaj jest podany. Model ten będzie wykorzystany
1. Cel projektu. Zasymulować odpowiedź skokową procesu P(s). Na podstawie tej odpowiedzi skokowej, określić τ oraz T i wyznaczyć parametry modelu M(s), którego rodzaj jest podany. Model ten będzie wykorzystany
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Transmitancje i charakterystyki częstotliwościowe. Krzysztof Patan
 Transmitancje i charakterystyki częstotliwościowe Krzysztof Patan Transmitancja systemu czasu ciągłego Przekształcenie Laplace a systemu czasu ciągłego jest superpozycją składowych pochodzących od wymuszenia
Transmitancje i charakterystyki częstotliwościowe Krzysztof Patan Transmitancja systemu czasu ciągłego Przekształcenie Laplace a systemu czasu ciągłego jest superpozycją składowych pochodzących od wymuszenia
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy automatyki MATLAB przykłady Materiały pomocnicze do ćwiczeń laboratoryjnych Część III termin T
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy automatyki MATLAB przykłady Materiały pomocnicze do ćwiczeń laboratoryjnych Część III termin T
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 5 BADANIE STABILNOŚCI UKŁADÓW ZE SPRZĘŻENIEM ZWROTNYM 1. Cel ćwiczenia Celem ćwiczenia jest ugruntowanie
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 5 BADANIE STABILNOŚCI UKŁADÓW ZE SPRZĘŻENIEM ZWROTNYM 1. Cel ćwiczenia Celem ćwiczenia jest ugruntowanie
Transformata Laplace a to przekształcenie całkowe funkcji f(t) opisane następującym wzorem:
 opisane następującym wzorem:") PPS 2 kartkówka 1 RÓWNANIE RÓŻNICOWE Jest to dyskretny odpowiednik równania różniczkowego. Równania różnicowe to pewne związki rekurencyjne określające w sposób niebezpośredni wartość danego wyrazu ciągu.
PPS 2 kartkówka 1 RÓWNANIE RÓŻNICOWE Jest to dyskretny odpowiednik równania różniczkowego. Równania różnicowe to pewne związki rekurencyjne określające w sposób niebezpośredni wartość danego wyrazu ciągu.
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
PAiTM. materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż.
 PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
Cyfrowe sterowanie przekształtników impulsowych lato 2012/13
 Cyfrowe sterowanie przekształtników impulsowych lato 2012/13 dr inż. Łukasz Starzak Politechnika Łódzka Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Katedra Mikroelektroniki i Technik
Cyfrowe sterowanie przekształtników impulsowych lato 2012/13 dr inż. Łukasz Starzak Politechnika Łódzka Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Katedra Mikroelektroniki i Technik
Uzupełnienie skryptów do laboratorium sterowania analogowego
 Uzupełnienie skryptów do laboratorium sterowania analogowego dr inż. Piotr Fiertek Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska Gdańsk, 2016 Spis treści 1 Wymagania dotyczące
Uzupełnienie skryptów do laboratorium sterowania analogowego dr inż. Piotr Fiertek Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska Gdańsk, 2016 Spis treści 1 Wymagania dotyczące
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Teoria sterowania Odpowiedzi czasowe ciągłych i dyskretnych systemów dynamicznych Zadania do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Teoria sterowania Odpowiedzi czasowe ciągłych i dyskretnych systemów dynamicznych Zadania do ćwiczeń laboratoryjnych
1. Transformata Laplace a przypomnienie
 Transformata Laplace a - przypomnienie, transmitancja operatorowa, schematy blokowe, wprowadzenie do pakietu Matlab/Scilab i Simulink, regulatory PID - transmitancja, przykłady modeli matematycznych wybranych
Transformata Laplace a - przypomnienie, transmitancja operatorowa, schematy blokowe, wprowadzenie do pakietu Matlab/Scilab i Simulink, regulatory PID - transmitancja, przykłady modeli matematycznych wybranych
Teoria sterowania - studia niestacjonarne AiR 2 stopień
 Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
PODSTAWY AUTOMATYKI. MATLAB - instrukcje i funkcje zewnętrzne. Grafika w Matlabie. Wprowadzenie do biblioteki Control System Toolbox.
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI MATLAB - instrukcje i funkcje zewnętrzne. Grafika w Matlabie. Wprowadzenie do biblioteki Control System Toolbox.
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI MATLAB - instrukcje i funkcje zewnętrzne. Grafika w Matlabie. Wprowadzenie do biblioteki Control System Toolbox.
Inżynieria Systemów Dynamicznych (4)
") Inżynieria Systemów Dynamicznych (4) liniowych (układów) Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 2 WE OKREŚLO 3 ASYMPTO 4 DYNAMICZ
Inżynieria Systemów Dynamicznych (4) liniowych (układów) Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 2 WE OKREŚLO 3 ASYMPTO 4 DYNAMICZ
Ćwiczenie 6 Projektowanie filtrów cyfrowych o skończonej i nieskończonej odpowiedzi impulsowej
 Ćwiczenie 6 Projektowanie filtrów cyfrowych o skończonej i nieskończonej odpowiedzi impulsowej 1. Filtry FIR o skończonej odpowiedzi impulsowej (SOI) Filtracja FIR polega na tym, że sygnał wyjściowy powstaje
Ćwiczenie 6 Projektowanie filtrów cyfrowych o skończonej i nieskończonej odpowiedzi impulsowej 1. Filtry FIR o skończonej odpowiedzi impulsowej (SOI) Filtracja FIR polega na tym, że sygnał wyjściowy powstaje
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
pierwiastkowymi r(:,i) i-ta kolumna tablicy r z wartościami w II ćwiartce płaszczyzny (Re s, Im s) odpowiadająca linii
 i-ta kolumna tablicy r z wartościami w II ćwiartce płaszczyzny (Re s, Im s) odpowiadająca linii") 5. PROJEKTOWANIE METODĄ LINII PIERWIASTKOWYCH Regulator P Problem dane: szukane: Tok projektowania Linie pierwiastkowe dla Spośród nich wybiera się linię przecinającą prostą nachyloną pod kątem (do ujemnej
5. PROJEKTOWANIE METODĄ LINII PIERWIASTKOWYCH Regulator P Problem dane: szukane: Tok projektowania Linie pierwiastkowe dla Spośród nich wybiera się linię przecinającą prostą nachyloną pod kątem (do ujemnej
Automatyka i robotyka
 Automatyka i robotyka Wykład 1 - Wprowadzenie do automatyki Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu Podstawowe informacje Wprowadzenie
Automatyka i robotyka Wykład 1 - Wprowadzenie do automatyki Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu Podstawowe informacje Wprowadzenie
2. Wyznaczenie parametrów dynamicznych obiektu na podstawie odpowiedzi na skok jednostkowy, przy wykorzystaniu metody Küpfmüllera.
 1. Celem projektu jest zaprojektowanie układu regulacji wykorzystującego regulator PI lub regulator PID, dla określonego obiektu składającego się z iloczynu dwóch transmitancji G 1 (s) i G 2 (s). Następnym
1. Celem projektu jest zaprojektowanie układu regulacji wykorzystującego regulator PI lub regulator PID, dla określonego obiektu składającego się z iloczynu dwóch transmitancji G 1 (s) i G 2 (s). Następnym
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 3. Charakterystyki
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 3. Charakterystyki
Filtry elektroniczne sygnałów ciągłych - cz.1
 Filtry elektroniczne sygnałów ciągłych - cz.1 Wprowadzenie Podstawowe pojęcia Klasyfikacje, charakterystyki częstotliwościowe filtrów Właściwości filtrów w dziedzinie czasu Realizacje elektroniczne filtrów
Filtry elektroniczne sygnałów ciągłych - cz.1 Wprowadzenie Podstawowe pojęcia Klasyfikacje, charakterystyki częstotliwościowe filtrów Właściwości filtrów w dziedzinie czasu Realizacje elektroniczne filtrów
Języki Modelowania i Symulacji
 Języki Modelowania i Symulacji Marcin Ciołek Katedra Systemów Automatyki WETI, Politechnika Gdańska 18 stycznia 2012 Literatura: 1. D. Kincaid, W. Cheney: Analiza numeryczna, Wydawnictwo Naukowo Techniczne,
Języki Modelowania i Symulacji Marcin Ciołek Katedra Systemów Automatyki WETI, Politechnika Gdańska 18 stycznia 2012 Literatura: 1. D. Kincaid, W. Cheney: Analiza numeryczna, Wydawnictwo Naukowo Techniczne,
LABORATORIUM 5: Sterowanie rzeczywistym serwomechanizmem z modułem przemieszczenia liniowego
 LABORATORIUM 5: Sterowanie rzeczywistym serwomechanizmem z modułem przemieszczenia liniowego Uwagi (pominąć, jeśli nie ma problemów z wykonywaniem ćwiczenia) 1. Jeśli pojawiają się błędy przy próbie symulacji:
LABORATORIUM 5: Sterowanie rzeczywistym serwomechanizmem z modułem przemieszczenia liniowego Uwagi (pominąć, jeśli nie ma problemów z wykonywaniem ćwiczenia) 1. Jeśli pojawiają się błędy przy próbie symulacji:
KRYTERIA ALGEBRAICZNE STABILNOŚCI UKŁADÓW LINIOWYCH
 KRYTERIA ALEBRAICZNE STABILNOŚCI UKŁADÓW LINIOWYCH Zadie 1 Problem: Zbadać stabilność układu zamkniętego przedstawionego na schemacie według kryterium Hurwitza. 1 (s) (s) Rys 1. Schemat układu regulacji
KRYTERIA ALEBRAICZNE STABILNOŚCI UKŁADÓW LINIOWYCH Zadie 1 Problem: Zbadać stabilność układu zamkniętego przedstawionego na schemacie według kryterium Hurwitza. 1 (s) (s) Rys 1. Schemat układu regulacji
LINIOWE UKŁADY DYSKRETNE
 LINIOWE UKŁADY DYSKRETNE Współczesne układy regulacji automatycznej wyposażone są w regulatory cyfrowe, co narzuca konieczność stosowania w ich analizie i syntezie odpowiednich równań dynamiki, opisujących
LINIOWE UKŁADY DYSKRETNE Współczesne układy regulacji automatycznej wyposażone są w regulatory cyfrowe, co narzuca konieczność stosowania w ich analizie i syntezie odpowiednich równań dynamiki, opisujących
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
ELEKTRONIKA W EKSPERYMENCIE FIZYCZNYM
 ELEKTRONIKA W EKSPERYMENCIE FIZYCZNYM D. B. Tefelski Zakład VI Badań Wysokociśnieniowych Wydział Fizyki Politechnika Warszawska, Koszykowa 75, 00-662 Warszawa, PL 28 lutego 2011 Stany nieustalone, stabilność
ELEKTRONIKA W EKSPERYMENCIE FIZYCZNYM D. B. Tefelski Zakład VI Badań Wysokociśnieniowych Wydział Fizyki Politechnika Warszawska, Koszykowa 75, 00-662 Warszawa, PL 28 lutego 2011 Stany nieustalone, stabilność
SIMATIC S Regulator PID w sterowaniu procesami. dr inż. Damian Cetnarowicz. Plan wykładu. I n t e l i g e n t n e s y s t e m y z e
 Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
ANALOGOWE I MIESZANE STEROWNIKI PRZETWORNIC. Ćwiczenie 3. Przetwornica podwyższająca napięcie Symulacje analogowego układu sterowania
 Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Podstawy Automatyki Zbiór zadań dla studentów II roku AiR oraz MiBM
 Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Dla naszego obiektu ciągłego: przy czasie próbkowania T p =2.
 1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o