POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII. Roman Kaula
|
|
|
- Nina Orłowska
- 7 lat temu
- Przeglądów:
Transkrypt






1 POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH
2 PLAN WYKŁADU Wprowadzenie Modelowanie układów dynamicznych Podstawowe metody opisu liniowych układów dynamicznych Realizacja modeli układów dynamicznych w programie LabVIEW Realizacja modeli układów dynamicznych w programie MATLAB/Simulink Podsumowanie
3 Model jest reprezentacją istniejącego (lub hipotetycznego) fragmentu rzeczywistości jest budowany w określonym celu, związanym z ustalaniem związków pomiędzy wielkościami, które opisują interesujący nas fragment rzeczywistości Model matematyczny to matematyczny opis rzeczywistego (lub hipotetycznego) systemu model sformalizowany za pomocą aparatu matematycznego
4 Fragment rzeczywistości: czwórnik RC R i(t) u we (t) C u wy (t) Cel: badanie procesów przejściowych wiążących napięcie wejściowe czwórnika z napięciem wyjściowym
5 Zdecydowaną większość układów rzeczywistych zaliczamy do układów dynamicznych Jak rozpoznać układy dynamiczne? UKŁAD DYNAMICZNY : to układ w którym przebiegi wielkości fizycznych rozpatruje się jako funkcje czasu na wartości wielkości wyjściowych systemu w chwili t, mają wpływ nie tylko wartości wielkości wejściowych w tej właśnie chwili, ale również ich wartości w chwilach wcześniejszych od t układ przejawia właściwości dynamiczne, jeżeli zawiera elementy posiadające zdolność magazynowania i oddawania energii
6 Model matematyczny układu dynamicznego sformalizowany model układu dynamicznego Własności obiektów dynamicznych mogą być opisane przy pomocy modeli sformalizowanych Dla opisu własności dynamicznych różnych obiektów dynamicznych poszukuje się takich samych metod W większości przypadków punktem wyjścia do oceny własności dynamicznych układów liniowych jest liniowe równanie różniczkowe
7 PODSTAWOWE METODY OPISU MODELI UKŁADÓW DYNAMICZNYCH Metoda schematu operacyjnego Transmitancja operatorowa Zmiennych stanu
8 8 ku y a dt dy a dt y d a dt y d a o n n n n n n y a a dt dy a a dt y d a a u a k dt y d n o n n n n n n n n Metoda schematu operacyjnego KROK 1
9 KROK 2 d n dt y n d n dt 1 y n 1 d n dt n 2 y 2... dy dt y KROK 3 d u y n 2 dt n y 2 k a n a 0 a n a n-2 a n d n dt y n d n dt n 1 y 1 a n-1 a n -
10 KROK 4 u k a n a 0 a n a n-2 a n d n dt y n d n 1 dt y n 1 d dt n 2 y n 2... dy dt y a n-1 a n -
 ( ) ( ) ( ) ( ) ( 2 2 t u dt t du RC dt t u d LC t u c c c u u c R C L")
11 Przykład - Układ RLC dt t du C t i t u dt di L t Ri t u c c ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 2 2 t u dt t du RC dt t u d LC t u c c c u u c R C L i
12 Schemat Operacyjny KROK 1 d 2 u dt c 2 ( t) 1 LC u( t) R L du c dt ( t) 1 LC u c ( t) KROK 2 d 2 c 2 dt u du c dt u c
13 Schemat Operacyjny KROK 3 u du c dt 1 LC R L + - d 2 c 2 dt u u c 1 LC -
14 Schemat Operacyjny KROK 4 u 1 LC + d 2 c 2 dt u du c dt u c 1 LC - R L -

 Y ( s) ku( s) KROK 3 Y ( s) U ( s) K ( s) a n s n.")
15 Transmitancja Operatorowa a d n dt y a n 1 d y 1... n 1 dt n n n 1 a dy dt a o y ku KROK 1 KROK 2 a n s n Y { f ( t)} F( s) n 1, ( s) an 1s Y ( s)... a0y ( s) ku( s) ( a s n n... a1s a0 ) Y ( s) ku( s) KROK 3 Y ( s) U ( s) K ( s) a n s n... k a 1 s a 0
 ( ) ( ) ( ) ( ) ( 2 2 t u dt t du RC dt t u d LC t u c c c u u c R C L")
16 Przykład - Układ RLC dt t du C t i t u dt di L t Ri t u c c ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 2 2 t u dt t du RC dt t u d LC t u c c c u u c R C L i
 ( ) ( 2 RCs LCs s K s U s U c KROK 1 KROK 2 KROK 3 ) ( ) ( 1) ( 2 s U s U RCs LCs c Transmitancja Operatorowa")
17 ) ( ) ( ) ( ) ( 2 2 t u dt t du RC dt t u d LC t u c c c ) ( ) ( ) ( ) ( 2 s U s RCsU s U LCs s U c c c 1 1 ) ( ) ( ) ( 2 RCs LCs s K s U s U c KROK 1 KROK 2 KROK 3 ) ( ) ( 1) ( 2 s U s U RCs LCs c Transmitancja Operatorowa
 wymiarowa, B macierz (n x r) wymiarowa, C macierz (m x n) wymiarowa, D macierz (m x r) wymiarowa.")
18 MODEL - ZMIENNYCH STANU dx(t) dt y(t) Ax(t) Cx(t) Bu(t) Du(t) Równanie stanu Równanie wyjścia x(t) wektor zmiennych stanu, u(t) wektor wielkości wejściowych, y(t) wektor wielkości wyjściowych, A macierz kwadratowa (n x n) wymiarowa, B macierz (n x r) wymiarowa, C macierz (m x n) wymiarowa, D macierz (m x r) wymiarowa. x( t) x ( t) x x 1 2 n ( t) ( t) u( t) y( t) u u u 1 2 r y y ( t) 1 ( t) ( t) y ( t) 2 m ( t) ( t)
19 MODEL - ZMIENNYCH STANU KROK 1 Wyznaczamy najmniejszą liczbę zmiennych stanu x1(t),..., xn(t), która wystarcza do określenia stanu układu. KROK 2 Po określeniu zmiennych stanu należy układ opisać za pomocą równań różniczkowych pierwszego rzędu. (Jeżeli rząd obiektu jest równy n, to uzyskamy n równań pierwszego rzędu.) KROK 3 Na podstawie równań określamy macierze A, B, C, D. Dla układu o r wejściach i m wyjściach tworzymy wektory wejść u(t) i wyjść y(t)
20 Przykład - Układ RLC i R L u C u c u( t) i( t) Ri( t) L du c ( t) C dt di dt u c ( t)
21 Model Zmiennych Stanu KROK 1 x i u c KROK 2 di( t) dt du ( t) c dt R L 1 C i( t) i( t) 1 L u c ( t) 1 L u( t)
22 Model Zmiennych Stanu KROK 3 di dt du dt 1 C R L 0 L c c 0 1 i u 1 L u y y i 0 u c 0 u A R L 1 C 1 L 0 0 C B L 0 u [ u] y2 y y 1 D 0
23 Model symulacyjny to taki model matematyczny, który został zbudowany dla potrzeb symulacji Model symulacyjny: daje możliwość oddziaływania na model systemu wielkościami mającymi swoje odpowiedniki w badanym systemie, których efekt oddziaływania chcielibyśmy obserwować
24 Nowoczesne narzędzia inżynierskie służące do modelowania układów dynamicznych LabVIEW MATLAB/Simulink
25 Schemat operacyjny PROGRAM LabVIEW





26 Programy LabVIEW nazywane są programami Virtual Instruments lub w skrócie VI. Każdy program VI składa się z dwóch okien: Block Diagram (Kodu Programu) Front Panel (Programu wykonawczego - interfejsu użytkownika)
27 1. Schemat operacyjny Przełączamy się na okno Block Diagram (<ctrl+e>)
28 1. Schemat operacyjny Z zakładki Control Design & Simulation wybieramy <<Simulation<<
29 1. Schemat operacyjny Z zakładki Simulation wybieramy << Simulation Loop<<

30 1. Schemat operacyjny Umieszczamy blok <<Simulation Loop<< w oknie Block Diagram

31 1. Schemat operacyjny Z zakładki Simulation przechodzimy do << Continuous Linear System<<
32 1. Schemat operacyjny Z zakładki Continuous Linear System wybieramy blok << Integrator<<

33 1. Schemat operacyjny
34 1. Schemat operacyjny
35 1. Schemat operacyjny Z zakładki Simulation przechodzimy do << Signal Arithmetic<< i wybieramy bloki <<summation>> i <<multiplication>>

36 1. Schemat operacyjny Łączymy elementy według schematu operacyjnego.

37 1. Schemat operacyjny Z palety Controls wybieramy zakładkę Express, następnie zakładkę Numeric Controls

38 1. Schemat operacyjny Wybieramy blok Numeric Control i kopiujemy do okna Front Panel

39 1. Schemat operacyjny

40 1. Schemat operacyjny Przechodzimy do okna Block Diagram i łączymy bloki parametrów R, L, C z blokami wyrażeń arytmetycznych według schematu operacyjnego

41 1. Schemat operacyjny Z zakładki Simulation przechodzimy do << Signal Generation<< i wybieramy blok <<Step Signal>>
42 1. Schemat operacyjny

43 1. Schemat operacyjny Z zakładki Simulation przechodzimy do << Graph Utilities<< i wybieramy blok <<SimeTime Waveform>>

44 1. Schemat operacyjny

45 1. Schemat operacyjny

46 1. Schemat operacyjny Ustawiamy parametry symulacji

47 1. Schemat operacyjny
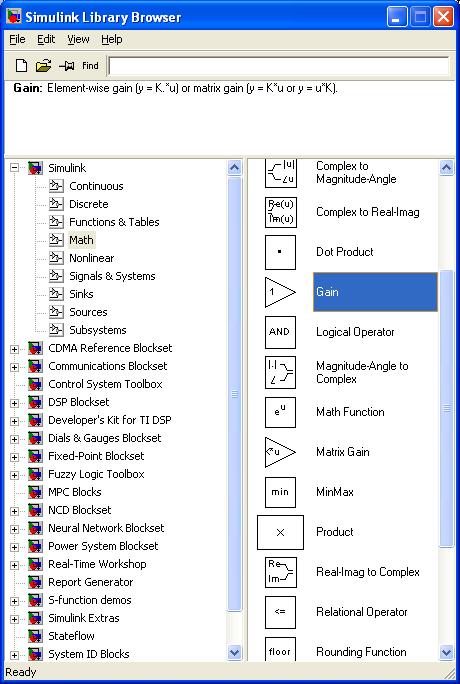
48 Schemat operacyjny PROGRAM MATLAB/Simulink
49
50 1. Schemat operacyjny
51
52 1. Schemat operacyjny

53
54 1. Schemat operacyjny
55
56 1. Schemat operacyjny
57
58 1. Schemat operacyjny
59

60 1. Schemat operacyjny

61 1. Schemat operacyjny
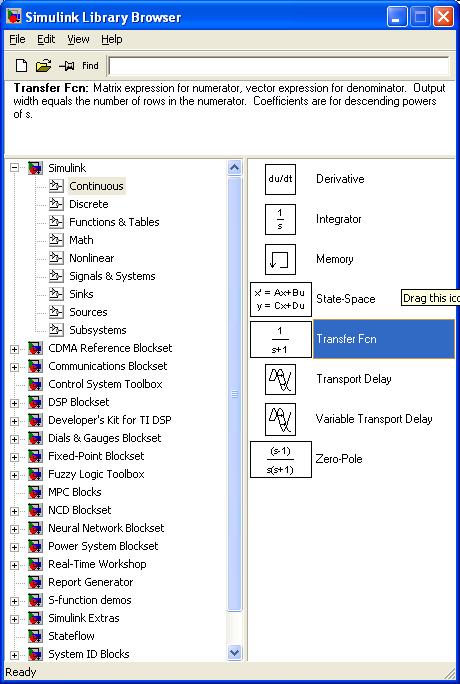
62 Transmitancja operatorowa PROGRAM LabVIEW
63 2. Transmitancja Operatorowa Przełączamy się na okno Block Diagram (<ctrl+e>)
64 2. Transmitancja Operatorowa Z paska narzędziowego Functions wybieramy kolejno: Control Design & Simulation >>Control Design>>
65 >>Model Construction>> 2. Transmitancja Operatorowa
66 2. Transmitancja Operatorowa Umieszczamy w oknie Block Diagram Blok - CD Construct Transfer Function Model.vi
67 2. Transmitancja Operatorowa Blok - CD Construct Transfer Function Model.vi

68 2. Transmitancja Operatorowa
69 2. Transmitancja Operatorowa

70 2. Transmitancja Operatorowa
71 2. Transmitancja Operatorowa
72 2. Transmitancja Operatorowa
73 2. Transmitancja Operatorowa
74 2. Transmitancja Operatorowa Umieszczamy w oknie Block Diagram Blok - CD Draw Transfer Function Model.vi
75 2. Transmitancja Operatorowa
76 2. Transmitancja Operatorowa
77 2. Transmitancja Operatorowa
78 2. Transmitancja Operatorowa

79 2. Transmitancja Operatorowa

80 2. Transmitancja Operatorowa
81 Transmitancja Operatorowa PROGRAM MATLAB/Simulink
82

83 2. Transmitancja Operatorowa
84 2. Transmitancja Operatorowa

85 2. Transmitancja Operatorowa
86 Zmienne Stanu PROGRAM LabVIEW

87 3. Zmienne Stanu

88 3. Zmienne Stanu
89 3. Zmienne Stanu Umieszczamy w oknie Block Diagram Blok - CD Construct State-Space Model.vi
90 3. Zmienne Stanu
91 3. Zmienne Stanu

92 3. Zmienne Stanu
93 3. Zmienne Stanu Umieszczamy w oknie Block Diagram Blok - CD Draw State-Space Model.vi
94 3. Zmienne Stanu
95 3. Zmienne Stanu

96 3. Zmienne Stanu

97 3. Zmienne Stanu

98 3. Zmienne Stanu

99 3. Zmienne Stanu
100 Zmienne Stanu PROGRAM MATLAB/Simulink
101

102 3. Zmienne Stanu

103 3. Zmienne Stanu

104
105 3. Zmienne Stanu

106 PODSUMOWANIE Wybrane zastosowania modelowania matematycznego : Analizowanie zjawisk służące głębszemu ich zrozumieniu (modele w fizyce, chemii...)

107 PODSUMOWANIE Wybrane zastosowania modelowania matematycznego : Sterowanie procesami (regulacja stałowartościowa)

108 PODSUMOWANIE Wybrane zastosowania modelowania matematycznego : Sterowanie procesami (regulacja nadążna)
109 DZIĘKUJĘ ZA UWAGĘ
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Opis systemów dynamicznych w przestrzeni stanu. Wojciech Kurek , Gdańsk
 Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Systemy. Krzysztof Patan
 Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
przy warunkach początkowych: 0 = 0, 0 = 0
 MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania MODELOWANIE I IDENTYFIKACJA Studia niestacjonarne Estymacja parametrów modeli, metoda najmniejszych kwadratów.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania MODELOWANIE I IDENTYFIKACJA Studia niestacjonarne Estymacja parametrów modeli, metoda najmniejszych kwadratów.
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SYMULACJA ZAKŁÓCEŃ W UKŁADACH AUTOMATYKI UTWORZONYCH ZA POMOCĄ OBWODÓW ELEKTRYCZNYCH W PROGRAMACH MATHCAD I PSPICE
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 76 Electrical Engineering 2013 Piotr FRĄCZAK* SYMULACJA ZAKŁÓCEŃ W UKŁADACH AUTOMATYKI UTWORZONYCH ZA POMOCĄ OBWODÓW ELEKTRYCZNYCH W PROGRAMACH MATHCAD
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 76 Electrical Engineering 2013 Piotr FRĄCZAK* SYMULACJA ZAKŁÓCEŃ W UKŁADACH AUTOMATYKI UTWORZONYCH ZA POMOCĄ OBWODÓW ELEKTRYCZNYCH W PROGRAMACH MATHCAD
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych
 Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Laboratorium Komputerowego Wspomagania Analizy i Projektowania
 Laboratorium Komputerowego Wspomagania Analizy i Projektowania Ćwiczenie 6. Symulacja obiektów dynamicznych w środowisku SIMULINK. Opracował: dr inż. Sebastian Dudzik 1. Cel ćwiczenia Celem ćwiczenia jest
Laboratorium Komputerowego Wspomagania Analizy i Projektowania Ćwiczenie 6. Symulacja obiektów dynamicznych w środowisku SIMULINK. Opracował: dr inż. Sebastian Dudzik 1. Cel ćwiczenia Celem ćwiczenia jest
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Transmitancje układów ciągłych
 Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Tematyka egzaminu z Podstaw sterowania
 Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
INSTRUKCJA LABORATORIUM ELEKTROTECHNIKI
 INSTRUKCJA LABORATORIUM ELEKTROTECHNIKI BADANIE ZJAWISKA REZONANSU W SZEREGOWYM OBWODZIE RLC PRZY POMOCY PROGRAMU MATLAB/SIMULINK Autor: Tomasz Trawiński, Strona /7 . Cel ćwiczenia Celem ćwiczenia jest
INSTRUKCJA LABORATORIUM ELEKTROTECHNIKI BADANIE ZJAWISKA REZONANSU W SZEREGOWYM OBWODZIE RLC PRZY POMOCY PROGRAMU MATLAB/SIMULINK Autor: Tomasz Trawiński, Strona /7 . Cel ćwiczenia Celem ćwiczenia jest
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Rys 1 Schemat modelu masa- sprężyna- tłumik
 Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Technika regulacji automatycznej
 Technika regulacji automatycznej Wykład 1 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 30 Plan wykładu Podstawowe informacje Modele układów elektrycznych
Technika regulacji automatycznej Wykład 1 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 30 Plan wykładu Podstawowe informacje Modele układów elektrycznych
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT. Instrukcja do zajęc laboratoryjnych nr 6 AUTOMATYKA
 AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 6 AUTOMATYKA II rok Kierunek Transport Temat: Transmitancja operatorowa. Badanie odpowiedzi układów automatyki. Opracował
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 6 AUTOMATYKA II rok Kierunek Transport Temat: Transmitancja operatorowa. Badanie odpowiedzi układów automatyki. Opracował
Podstawy Informatyki 1. Laboratorium 8
 Podstawy Informatyki 1 Laboratorium 8 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z nakładką SIMULINK oraz zdobycie praktycznych umiejętności tworzenia i symulowania modeli z wykorzystaniem tej
Podstawy Informatyki 1 Laboratorium 8 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z nakładką SIMULINK oraz zdobycie praktycznych umiejętności tworzenia i symulowania modeli z wykorzystaniem tej
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych
 Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
Właściwości dynamiczne kolektora słonecznego a efektywność instalacji grzewczej
 Właściwości dynamiczne kolektora słonecznego a efektywność instalacji grzewczej mgr inż. Joanna Aleksiejuk 2016-09-19 Problemy gospodarki energią i środowiskiem w rolnictwie, leśnictwie i przemyśle spożywczym
Właściwości dynamiczne kolektora słonecznego a efektywność instalacji grzewczej mgr inż. Joanna Aleksiejuk 2016-09-19 Problemy gospodarki energią i środowiskiem w rolnictwie, leśnictwie i przemyśle spożywczym
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Informatyczne Systemy Sterowania
 Adam Wiernasz Nr albumu: 161455 e-mail: 161455@student.pwr.wroc.pl Informatyczne Systemy Sterowania Laboratorium nr 1 Prowadzący: Dr inż. Magdalena Turowska I. Wykaz modeli matematycznych członów dynamicznych
Adam Wiernasz Nr albumu: 161455 e-mail: 161455@student.pwr.wroc.pl Informatyczne Systemy Sterowania Laboratorium nr 1 Prowadzący: Dr inż. Magdalena Turowska I. Wykaz modeli matematycznych członów dynamicznych
Automatyka i sterowanie w gazownictwie wstęp. Autor: dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów
 Automatyka i sterowanie w gazownictwie wstęp Autor: dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów Sprawy organizacyjne Wykłady (15 h) Dr inż. Iwona Oprzędkiewicz
Automatyka i sterowanie w gazownictwie wstęp Autor: dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów Sprawy organizacyjne Wykłady (15 h) Dr inż. Iwona Oprzędkiewicz
Symulacja pracy silnika prądu stałego
 KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Symulacja pracy silnika prądu stałego Opracował: Dr inż. Roland Pawliczek Opole 016
KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Symulacja pracy silnika prądu stałego Opracował: Dr inż. Roland Pawliczek Opole 016
WYKŁAD PROF. DR HAB. INŻ. TADEUSZA KACZORKA
 W pracy tej zostaną przedstawione: - warunki konieczne i wystarczające cykliczności macierzy A normalności macierzy transmitancji T(s); - warunki istnienia i metody doboru sprzężeń zwrotnych od stanu tak,
W pracy tej zostaną przedstawione: - warunki konieczne i wystarczające cykliczności macierzy A normalności macierzy transmitancji T(s); - warunki istnienia i metody doboru sprzężeń zwrotnych od stanu tak,
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
1. Rejestracja odpowiedzi skokowej obiektu rzeczywistego i wyznaczenie podstawowych parametrów dynamicznych obiektu
 Cel ćwiczenia: Zapoznanie się z metodami badania i analitycznego wyznaczania parametrów dynamicznych rzeczywistego obiektu regulacji (identyfikacji obiektu regulacji) na przykładzie mikrotermostatu oraz
Cel ćwiczenia: Zapoznanie się z metodami badania i analitycznego wyznaczania parametrów dynamicznych rzeczywistego obiektu regulacji (identyfikacji obiektu regulacji) na przykładzie mikrotermostatu oraz
1. Opis teoretyczny regulatora i obiektu z opóźnieniem.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
Teoria sterowania - studia niestacjonarne AiR 2 stopień
 Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Podstawy Automatyki. Wykład 2 - matematyczne modelowanie układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - matematyczne modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - matematyczne modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Synteza układów kombinacyjnych metodą tablic Karnaugha - ćwiczenie 10
 Synteza układów kombinacyjnych metodą tablic Karnaugha - ćwiczenie 10 1. Cel ćwiczenia: Celem ćwiczenia jest praktyczna realizacja układu kombinacyjnego na podstawie funkcji boolowskich wyznaczonych na
Synteza układów kombinacyjnych metodą tablic Karnaugha - ćwiczenie 10 1. Cel ćwiczenia: Celem ćwiczenia jest praktyczna realizacja układu kombinacyjnego na podstawie funkcji boolowskich wyznaczonych na
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transform
 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Teoria sterowania Wprowadzenie do Simulinka w środowisku MATLAB Materiały pomocnicze do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Teoria sterowania Wprowadzenie do Simulinka w środowisku MATLAB Materiały pomocnicze do ćwiczeń laboratoryjnych
Podstawy użytkowania programu LabView
 Politechnika Warszawska Wydział Transportu Zakład Telekomunikacji w Transporcie Podstawy użytkowania programu LabView Opracował : mgr inż. Adam Rosiński Wrzesień 2004 Spis treści: 1. Wstęp... 3 2. Panel
Politechnika Warszawska Wydział Transportu Zakład Telekomunikacji w Transporcie Podstawy użytkowania programu LabView Opracował : mgr inż. Adam Rosiński Wrzesień 2004 Spis treści: 1. Wstęp... 3 2. Panel
Podstawy Automatyki. Wykład 2 - modelowanie matematyczne układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Podstawy Automatyki. Wykład 2 - modelowanie matematyczne układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
1. Podstawowe pojęcia
 1. Podstawowe pojęcia Sterowanie optymalne obiektu polega na znajdowaniu najkorzystniejszej decyzji dotyczącej zamierzonego wpływu na obiekt przy zadanych ograniczeniach. Niech dany jest obiekt opisany
1. Podstawowe pojęcia Sterowanie optymalne obiektu polega na znajdowaniu najkorzystniejszej decyzji dotyczącej zamierzonego wpływu na obiekt przy zadanych ograniczeniach. Niech dany jest obiekt opisany
Przyjmuje się umowę, że:
 MODELE OPERATOROWE Modele operatorowe elementów obwodów wyprowadza się wykorzystując znane zależności napięciowo-prądowe dla elementów R, L, C oraz źródeł idealnych. Modele te opisują zależności pomiędzy
MODELE OPERATOROWE Modele operatorowe elementów obwodów wyprowadza się wykorzystując znane zależności napięciowo-prądowe dla elementów R, L, C oraz źródeł idealnych. Modele te opisują zależności pomiędzy
Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy. Obowiązkowy Polski VI semestr zimowy
 KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Ćwiczenie - 1 OBSŁUGA GENERATORA I OSCYLOSKOPU. WYZNACZANIE CHARAKTERYSTYKI AMPLITUDOWEJ I FAZOWEJ NA PRZYKŁADZIE FILTRU RC.
 Ćwiczenie - 1 OBSŁUGA GENERATORA I OSCYLOSKOPU. WYZNACZANIE CHARAKTERYSTYKI AMPLITUDOWEJ I FAZOWEJ NA PRZYKŁADZIE FILTRU RC. Spis treści 1 Cel ćwiczenia 2 2 Podstawy teoretyczne 2 2.1 Charakterystyki częstotliwościowe..........................
Ćwiczenie - 1 OBSŁUGA GENERATORA I OSCYLOSKOPU. WYZNACZANIE CHARAKTERYSTYKI AMPLITUDOWEJ I FAZOWEJ NA PRZYKŁADZIE FILTRU RC. Spis treści 1 Cel ćwiczenia 2 2 Podstawy teoretyczne 2 2.1 Charakterystyki częstotliwościowe..........................
Analityczne metody detekcji uszkodzeń
 Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 5 Model procesu Rozważmy czasowo-dyskretny model liniowy gdzie: k dyskretny czas, x(k) R n wektor stanu, x(k + 1) = Ax(k)
Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 5 Model procesu Rozważmy czasowo-dyskretny model liniowy gdzie: k dyskretny czas, x(k) R n wektor stanu, x(k + 1) = Ax(k)
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Technologie informatyczne Wprowadzenie do Simulinka w środowisku MATLAB Pytania i zadania do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Technologie informatyczne Wprowadzenie do Simulinka w środowisku MATLAB Pytania i zadania do ćwiczeń laboratoryjnych
Podstawy budowy wirtualnych przyrządów pomiarowych
 Podstawy budowy wirtualnych przyrządów pomiarowych Problemy teoretyczne: Pomiar parametrów napięciowych sygnałów za pomocą karty kontrolno pomiarowej oraz programu LabVIEW (prawo Shanona Kotielnikowa).
Podstawy budowy wirtualnych przyrządów pomiarowych Problemy teoretyczne: Pomiar parametrów napięciowych sygnałów za pomocą karty kontrolno pomiarowej oraz programu LabVIEW (prawo Shanona Kotielnikowa).
Technika regulacji automatycznej
 Technika regulacji automatycznej Wykład 2 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 56 Plan wykładu Schematy strukturalne Podstawowe operacje na schematach
Technika regulacji automatycznej Wykład 2 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 56 Plan wykładu Schematy strukturalne Podstawowe operacje na schematach
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH
 POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST Semestr letni Wykład nr 3 Prawo autorskie Niniejsze
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST Semestr letni Wykład nr 3 Prawo autorskie Niniejsze
Algorytmy sztucznej inteligencji
 Algorytmy sztucznej inteligencji Dynamiczne sieci neuronowe 1 Zapis macierzowy sieci neuronowych Poniżej omówione zostaną części składowe sieci neuronowych i metoda ich zapisu za pomocą macierzy. Obliczenia
Algorytmy sztucznej inteligencji Dynamiczne sieci neuronowe 1 Zapis macierzowy sieci neuronowych Poniżej omówione zostaną części składowe sieci neuronowych i metoda ich zapisu za pomocą macierzy. Obliczenia
Wykład z Technologii Informacyjnych. Piotr Mika
 Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
Przekształcanie schematów blokowych. Podczas ćwiczenia poruszane będą następujące zagadnienia:
 Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji
 Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji Opracowanie: mgr inż. Krystian Łygas, inż. Wojciech Danilczuk Na podstawie materiałów Prof. dr hab.
Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji Opracowanie: mgr inż. Krystian Łygas, inż. Wojciech Danilczuk Na podstawie materiałów Prof. dr hab.
Rozwiązywanie równań różniczkowych z niezerowymi warunkami początkowymi
 . Cele ćwiczenia Laboratorium nr Rozwiązywanie równań różniczkowych z niezerowymi warunkami początkowymi zapoznanie się z metodami symbolicznego i numerycznego rozwiązywania równań różniczkowych w Matlabie,
. Cele ćwiczenia Laboratorium nr Rozwiązywanie równań różniczkowych z niezerowymi warunkami początkowymi zapoznanie się z metodami symbolicznego i numerycznego rozwiązywania równań różniczkowych w Matlabie,
Szybkie prototypowanie w projektowaniu mechatronicznym
 Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Modelowanie Systemów Dynamicznych Studia zaoczne, Automatyka i Robotyka, rok II. Podstawy SIMULINKA
 Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Modelowanie Systemów Dynamicznych Studia zaoczne, Automatyka i Robotyka, rok II Podstawy SIMULINKA Simulink jest
Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Modelowanie Systemów Dynamicznych Studia zaoczne, Automatyka i Robotyka, rok II Podstawy SIMULINKA Simulink jest
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu. Dynamicznych. Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu Dynamicznych Nazwa modułu w języku
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu Dynamicznych Nazwa modułu w języku
Inżynieria Systemów Dynamicznych (4)
") Inżynieria Systemów Dynamicznych (4) liniowych (układów) Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 2 WE OKREŚLO 3 ASYMPTO 4 DYNAMICZ
Inżynieria Systemów Dynamicznych (4) liniowych (układów) Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 2 WE OKREŚLO 3 ASYMPTO 4 DYNAMICZ
Podstawy Automatyki. Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 część 1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 część 1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Badanie właściwości dynamicznych obiektów I rzędu i korekcja dynamiczna
 Ćwiczenie 20 Badanie właściwości dynamicznych obiektów I rzędu i korekcja dynamiczna Program ćwiczenia: 1. Wyznaczenie stałej czasowej oraz wzmocnienia statycznego obiektu inercyjnego I rzędu 2. orekcja
Ćwiczenie 20 Badanie właściwości dynamicznych obiektów I rzędu i korekcja dynamiczna Program ćwiczenia: 1. Wyznaczenie stałej czasowej oraz wzmocnienia statycznego obiektu inercyjnego I rzędu 2. orekcja
Metody symulacji komputerowych Modelowanie systemów technicznych
 Metody symulacji komputerowych Modelowanie systemów technicznych dr inż. Ryszard Myhan Katedra Inżynierii Procesów Rolniczych Program przedmiotu Lp. Temat Zakres 1. Wprowadzenie do teorii systemów Definicje
Metody symulacji komputerowych Modelowanie systemów technicznych dr inż. Ryszard Myhan Katedra Inżynierii Procesów Rolniczych Program przedmiotu Lp. Temat Zakres 1. Wprowadzenie do teorii systemów Definicje
Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, Spis treści
 Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, 2013 Spis treści Słowo wstępne 8 Wymagania egzaminacyjne 9 Wykaz symboli graficznych 10 Lekcja 1. Podstawowe prawa
Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, 2013 Spis treści Słowo wstępne 8 Wymagania egzaminacyjne 9 Wykaz symboli graficznych 10 Lekcja 1. Podstawowe prawa
Wykład 1. Reprezentacja układów dynamicznych w przestrzeni zmiennych stanu
 Wykład 1. Reprezentacja układów dynamicznych w przestrzeni zmiennych stanu 1 Reprezentacja układów sterowania w przestrzeni zmiennych stanu ma fundamentalne znaczenie w teorii sterowania. Opis układów
Wykład 1. Reprezentacja układów dynamicznych w przestrzeni zmiennych stanu 1 Reprezentacja układów sterowania w przestrzeni zmiennych stanu ma fundamentalne znaczenie w teorii sterowania. Opis układów
Badanie właściwości dynamicznych obiektów I rzędu i korekcja dynamiczna
 Ćwiczenie 20 Badanie właściwości dynamicznych obiektów I rzędu i korekcja dynamiczna Program ćwiczenia: 1. Wyznaczenie stałej czasowej oraz wzmocnienia obiektu inercyjnego I rzędu 2. orekcja dynamiczna
Ćwiczenie 20 Badanie właściwości dynamicznych obiektów I rzędu i korekcja dynamiczna Program ćwiczenia: 1. Wyznaczenie stałej czasowej oraz wzmocnienia obiektu inercyjnego I rzędu 2. orekcja dynamiczna
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Podstawy Automatyki Zbiór zadań dla studentów II roku AiR oraz MiBM
 Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Problemy optymalizacji układów napędowych w automatyce i robotyce
 Akademia Górniczo-Hutnicza im. Stanisława Staszica Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Katedra Automatyki Autoreferat rozprawy doktorskiej Problemy optymalizacji układów napędowych
Akademia Górniczo-Hutnicza im. Stanisława Staszica Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Katedra Automatyki Autoreferat rozprawy doktorskiej Problemy optymalizacji układów napędowych
Komputerowo wspomagane projektowanie systemów sterowania
 Komputerowo wspomagane projektowanie systemów sterowania OCENA KOŃCOWA: F1 ocena z laboratorium (sprawozdania z ćwiczeń laboratoryjnych) F2 kolokwium pisemne z wykładu (dopuszczeniowe) F3 egzamin pisemny
Komputerowo wspomagane projektowanie systemów sterowania OCENA KOŃCOWA: F1 ocena z laboratorium (sprawozdania z ćwiczeń laboratoryjnych) F2 kolokwium pisemne z wykładu (dopuszczeniowe) F3 egzamin pisemny
Program ćwiczenia: SYSTEMY POMIAROWE WIELKOŚCI FIZYCZNYCH - LABORATORIUM
 Podstawy budowy wirtualnych przyrządów pomiarowych Problemy teoretyczne: Pomiar parametrów napięciowych sygnałów za pomocą karty kontrolno pomiarowej oraz programu LabVIEW (prawo Shanona Kotielnikowa).
Podstawy budowy wirtualnych przyrządów pomiarowych Problemy teoretyczne: Pomiar parametrów napięciowych sygnałów za pomocą karty kontrolno pomiarowej oraz programu LabVIEW (prawo Shanona Kotielnikowa).
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
ZARZĄDZANIE PROCESAMI I PROJEKTAMI. Zakres projektu. dr inż. ADAM KOLIŃSKI ZARZĄDZANIE PROCESAMI I PROJEKTAMI. Zakres projektu. dr inż.
 1 ZARZĄDZANIE PROCESAMI I PROJEKTAMI 2 ZAKRES PROJEKTU 1. Ogólna specyfika procesów zachodzących w przedsiębiorstwie 2. Opracowanie ogólnego schematu procesów zachodzących w przedsiębiorstwie za pomocą
1 ZARZĄDZANIE PROCESAMI I PROJEKTAMI 2 ZAKRES PROJEKTU 1. Ogólna specyfika procesów zachodzących w przedsiębiorstwie 2. Opracowanie ogólnego schematu procesów zachodzących w przedsiębiorstwie za pomocą
WSTĘP DO ELEKTRONIKI
 WSTĘP DO ELEKTRONIKI Część IV Czwórniki Linia długa Janusz Brzychczyk IF UJ Czwórniki Czwórnik (dwuwrotnik) posiada cztery zaciski elektryczne. Dwa z tych zacisków uważamy za wejście czwórnika, a pozostałe
WSTĘP DO ELEKTRONIKI Część IV Czwórniki Linia długa Janusz Brzychczyk IF UJ Czwórniki Czwórnik (dwuwrotnik) posiada cztery zaciski elektryczne. Dwa z tych zacisków uważamy za wejście czwórnika, a pozostałe
Statyczne charakterystyki czujników
 Statyczne charakterytyki czujników Określają działanie czujnika w normalnych warunkach otoczenia przy bardzo powolnych zmianach wielkości wejściowej. Itotne zagadnienia: kalibracji hiterezy powtarzalności
Statyczne charakterytyki czujników Określają działanie czujnika w normalnych warunkach otoczenia przy bardzo powolnych zmianach wielkości wejściowej. Itotne zagadnienia: kalibracji hiterezy powtarzalności
Sterowanie napędów maszyn i robotów
 Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Modelowanie jako sposób opisu rzeczywistości. Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka
 Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 3 BADANIE CHARAKTERYSTYK CZASOWYCH LINIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia są pomiary i analiza
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 3 BADANIE CHARAKTERYSTYK CZASOWYCH LINIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia są pomiary i analiza
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Impulsowe przekształtniki napięcia stałego. Włodzimierz Janke Katedra Elektroniki, Zespół Energoelektroniki
 Impulsowe przekształtniki napięcia stałego Włodzimierz Janke Katedra Elektroniki, Zespół Energoelektroniki 1 1. Wstęp 2. Urządzenia do przetwarzanie energii elektrycznej 3. Problemy symulacji i projektowania
Impulsowe przekształtniki napięcia stałego Włodzimierz Janke Katedra Elektroniki, Zespół Energoelektroniki 1 1. Wstęp 2. Urządzenia do przetwarzanie energii elektrycznej 3. Problemy symulacji i projektowania
Politechnika Łódzka. Instytut Systemów Inżynierii Elektrycznej. Laboratorium przyrządów wirtualnych. Ćwiczenie 3
 Politechnika Łódzka Instytut Systemów Inżynierii Elektrycznej Laboratorium przyrządów wirtualnych Ćwiczenie 3 Wykorzystanie technologii ActiveX do rejestracji danych z przyrządów wirtualnych 1. Wstęp Do
Politechnika Łódzka Instytut Systemów Inżynierii Elektrycznej Laboratorium przyrządów wirtualnych Ćwiczenie 3 Wykorzystanie technologii ActiveX do rejestracji danych z przyrządów wirtualnych 1. Wstęp Do
Spacery losowe generowanie realizacji procesu losowego
 Spacery losowe generowanie realizacji procesu losowego Michał Krzemiński Streszczenie Omówimy metodę generowania trajektorii spacerów losowych (błądzenia losowego), tj. szczególnych procesów Markowa z
Spacery losowe generowanie realizacji procesu losowego Michał Krzemiński Streszczenie Omówimy metodę generowania trajektorii spacerów losowych (błądzenia losowego), tj. szczególnych procesów Markowa z
Sterowalność liniowych uk ladów sterowania
 Sterowalność liniowych uk ladów sterowania W zadaniach sterowania docelowego należy przeprowadzić obiekt opisywany za pomoc a równania stanu z zadanego stanu pocz atkowego ẋ(t) = f(x(t), u(t), t), t [t,
Sterowalność liniowych uk ladów sterowania W zadaniach sterowania docelowego należy przeprowadzić obiekt opisywany za pomoc a równania stanu z zadanego stanu pocz atkowego ẋ(t) = f(x(t), u(t), t), t [t,
Ćw. 2. Wprowadzenie do graficznego programowania przyrządów pomiarowych
 Ćw. 2. Wprowadzenie do graficznego programowania przyrządów pomiarowych Problemy teoretyczne: Prezentacja podstaw budowy komputerowych systemów pomiarowych (dopasowanie wymogów sprzętowych). Prezentacja
Ćw. 2. Wprowadzenie do graficznego programowania przyrządów pomiarowych Problemy teoretyczne: Prezentacja podstaw budowy komputerowych systemów pomiarowych (dopasowanie wymogów sprzętowych). Prezentacja
Modelowanie i obliczenia techniczne. dr inż. Paweł Pełczyński
 Modelowanie i obliczenia techniczne dr inż. Paweł Pełczyński ppelczynski@swspiz.pl Literatura Z. Fortuna, B. Macukow, J. Wąsowski: Metody numeryczne, WNT Warszawa, 2005. J. Awrejcewicz: Matematyczne modelowanie
Modelowanie i obliczenia techniczne dr inż. Paweł Pełczyński ppelczynski@swspiz.pl Literatura Z. Fortuna, B. Macukow, J. Wąsowski: Metody numeryczne, WNT Warszawa, 2005. J. Awrejcewicz: Matematyczne modelowanie
INSTRUKCJA DO ĆWICZENIA NR 7
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
E2_PA Podstawy automatyki Bases of automatic. Elektrotechnika II stopień (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny)
 Ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. P KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. P KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie. Sterowanie ciągłe. Teoria sterowania układów jednowymiarowych
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Sterowanie ciągłe Teoria sterowania układów jednowymiarowych 1 Informacja o prowadzących zajęcia Studia stacjonarne rok II Automatyka i Robotyka
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Sterowanie ciągłe Teoria sterowania układów jednowymiarowych 1 Informacja o prowadzących zajęcia Studia stacjonarne rok II Automatyka i Robotyka
Rozwiązywanie równań liniowych. Transmitancja. Charakterystyki częstotliwościowe
 Zał. nr do ZW 33/01 WYDZIAŁ Informatyki i Zarządzania / STUDIUM KARTA PRZEDMIOTU Nazwa w języku polskim Modele systemów dynamicznych Nazwa w języku angielskim Dynamic Systems Models. Kierunek studiów (jeśli
Zał. nr do ZW 33/01 WYDZIAŁ Informatyki i Zarządzania / STUDIUM KARTA PRZEDMIOTU Nazwa w języku polskim Modele systemów dynamicznych Nazwa w języku angielskim Dynamic Systems Models. Kierunek studiów (jeśli
Podstawy Automatyki. Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 cz.1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 cz.1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe