Platforma Galileo: Koncepcja uniwersalnego odbiornika sygnałów Galileo dla potrzeb nawigacji morskiej
|
|
|
- Anna Orłowska
- 8 lat temu
- Przeglądów:
Transkrypt
1 Samodzilna Pracownia Radiokomunikacji Morskij w Gdańsku (P-8) Plaforma Galilo: Koncpcja uniwrsalngo odbiornika sygnałów Galilo dla porzb nawigacji morskij Praca nr Gdańsk, grudziń 2006

2 Plaforma Galilo: Koncpcja uniwrsalngo odbiornika sygnałów Galilo dla porzb nawigacji morskij Praca nr Słowa kluczow: nawigacja saliarna, nawigacja morska, Galilo, GNSS Kirownik pracy: dr inż. Rafał Niski Wykonawcy pracy: mgr inż. Adam Lipka mgr inż. Mirosław Radziwanowski dr inż. Jack Sfański dr inż. Jrzy Żurk Kirownik Zakładu: dr inż. Rafał Niski Copyrigh by nsyu Łączności, Warszawa 2006

3 Spis rści 1. Wprowadzni Radionawigacja morska Sysm GALLO podsawow informacj Archikura sysmu GALLO Komponny archikury GALLO Usługi GALLO Sygnały GALLO Sygnał Sygnał Sygnał Kody rozpraszając w sysmi GALLO Ogólna srukura wiadomości przsyłanych w sysmi GALLO Podsumowani Sysm GALLO w świl wymagań morskich Wymagania morski na odbiornik GALLO Wyposażni sakowgo odbiornika GALLO Wymagania ksploaacyjn dla odbiornika GALLO Sprawdzani wiarygodności, osrzżnia o nisprawności i wskaźniki sanu Zabzpicznia Koncpcj sprzęowj ralizacji odbiornika GALLO Rozwiązania wykorzysując układy ASC Rozwiązania wykorzysując układy FPGA Tchnika radia programowalngo (SDR) Koncpcja budowy odbiornika GALLO Archikura i działani odbiornika GNSS Koncpcja ralizacji sprzęowj odbiornika Podsumowani... 8 Załącznik 1. Arykuł opublikowany w Zszyach Naukowych Wydziału T PG... 9 Załącznik 2. Arykuł opublikowany w mariałach z konfrncji MCC2006 w Gdyni Załącznik 3. Arykuł opublikowany w mariałach konfrncji KKRRiTv w Poznaniu Bibliografia
.")
4 1. Wprowadzni Clm ninijszj pracy sauowj było opracowani koncpcji budowy odbiornika sygnałów GALLO dla zasosowań morskich. W clu zminimalizowania w przyszłości koszów budowy akigo odbiornika jgo konsrukcję oparo o dobrz znaną z radiokomunikacji komórkowj chnologię radia programowalngo. Z uwagi na fak, iż odbiornik ma być przznaczony do pracy na morzu, rozmiar urządznia ni js w ym wypadku kryyczny. Opymalizacja powinna zmirzać naomias w kirunku możliwości funkcjonalnych opracowango rozwiązania. Zasosowani chnologii radia programowalngo do budowy odbiornika sygnałów GALLO wydaj się być opymalnym rozwiązanim, pozwalającym na rlaywni szybką i ławą rkonfigurację i przysosowani odbiornika do nowych zadań. W czasach, gdy oczkiwania użykowników zminiają się bardzo szybko maksymalna uniwrsalność odbiornika sanowiłaby jgo nizaprzczalną zalę. W związku z ym, rozwiązani sprzęow odbiornika zosało opar o konsrukcję modułową. Proponuj się w pirwszj koljności, do budowy członu fron-nd, wykorzysać goowy moduł ypu GP201 firmy Zarlink Smiconducor. Człon n odpowiada za wsępną obróbkę analogowgo sygnału, j. filrowani, wzmocnini, konwrsję w dół i konwrsję analogowo-cyfrową. Jako podsawę hardwar ową członu niskij częsoliwości posanowiono wykorzysać sysm procsorowy ypu MCF373L firmy Frscal. Moduł n ingruj możliwości obliczniow procsora sygnałowgo z bardzo szroką obsługą inrfjsów i urządzń pryfryjnych. Odpowidnio dobrana plaforma sprzęowa zosała dososowana do współpracy z środowiskim programisycznym ypu JAVA. Jak wynika z przprowadzonych sudiów liraury przdmiou, koncpcja związana z wykonanim odbiornika sygnałów GALLO w chnologii urządznia dfiniowango programowo, w oparciu o zaproponowan środowisko programisyczn JAVA, js pomysłm nowym i sanowi auorski wkład w rozwój implmnacji usług dla porzb radiokomunikacji morskij. Opracowani składa się z 7 rozdziałów, podsumowania oraz spisu liraury, zawirającj 41 pozycji. Po krókim wprowadzniu do mayki ninijszgo opracowania i przdsawiniu problmayki radionawigacji morskij zosała opisana archikura sysmu GALLO z szczgólnych uwzględninim warswy fizycznj sysmu. Koljn dwa rozdziały sanowią opis wymagań sysmu GALLO odnośni aplikacji morskich. Osani dwa rozdziały sanowią auorski opis koncpcji budowy odbiornika sysmu GALLO z możliwością dodakowj współpracy z sysmm GPS. Opracowani kończy się krókim podsumowanim całości. 4

5 2. Radionawigacja morska Od począków hisorii żglugi, ludzi morza poszukiwali możliwości okrślania swojj pozycji i kirunku podróżowania. Zasosowani kompasu magnyczngo dauj się na wik dwunasy. W końcu wiku 1-go żglarz używali już przyrządów asronomicznych do wyznaczania położnia ciał nibiskich, akich jak kwadran czy asrolabium. Wynalziony w 18-ym wiku sksan i chronomr umożliwiły okrślani zarówno szrokości jak i długości gograficznj. Wynalazk radia pod konic 19-go wiku umożliwił rozwój bardzij wyrafinowanych sysmów nawigacji morskij. Radiow sygnały czasow rozgłaszan były po raz pirwszy z Paryża w roku 1910, umożliwiając dokładnijsz okrślani długości gograficznj. Włoscy wynalazcy Bllini i Tosi opracowali w ym czasi sysm okrślania kirunku, z kórgo sygnały radiow są ransmiowan. Po drugij wojni świaowj wynalazk radaru sworzył możliwość usalania przz saki swojj pozycji w odlgłości od 48 do 60 mil morskich od brzgu. Nasępni hiprboliczn sysmy radiow umożliwiły dokładn okrślani pozycji saku w zakrsi co najmnij 20 mil morskich. Pirwsz sysmy radionawigacji aki jak Dcca Navigaor i Loran A wymagały, aby odbiorniki dokonywały pomiaru sygnałów radiowych od pwnj grupy nadajników ransmiujących sygnały odnisinia równoczśni lub w okrślonj koljności. Od roku 1970, na ważnych obszarach ocanicznych zaczęły działać sysmy Loran C i Diffrnial Omga, kór wykorzysując wczsną chnologię kompurową porafiły przdsawić pozycję saku w posaci wydruku lkroniczngo. Związk Radzicki wdrożył równiż własny sysm o nazwi Czajka. Wysrzlni pirwszych szucznych saliów oworzyło nową rę w dzidzini radionawigacji, w ym możliwość uworznia sysmu globalngo. Międzynarodowa Organizacja Morska (MO) rozpoczęła już w 198 roku prac rozpoznawcz nad globalnym sysmm saliarnym służącym do usalania pozycji saku, mającym na clu poprawini bzpiczńswa żglugi. Wyniki ych prac zosały przyję na 16 Ssji Zgromadznia MO w 1989 roku i przdsawion w rzolucji [1]. Opracowany rapor zawirał szczgółow omówini różnorodnych, już wówczas działających, nazimnych sysmów radionawigacyjnych (Omga, Loran-C, Czajka), jak równiż sysmów saliarnych, będących wówczas w fazi rozwoju amrykańskigo sysmu wojskowgo GPS (Global Posiioning Sysm) oraz sysmu, wdrażango wówczas przz armię Związku Radzickigo, o nazwi GLONASS (Global Navigaion Salli Sysm), zarządzango obcni przz władz Fdracji Rosyjskij i Rosyjską Agncję Kosmiczną. W raporci swirdzono, ż MO ni przwiduj wdrażania własngo globalngo sysmu radionawigacyjngo i dlago prowadzon są sudia nad isnijącymi i planowanymi sysmami pod kąm możliwości ich zaakcpowania dla nawigacji morskij [2]. Uznani akigo sysmu radionawigacyjngo przz MO byłoby równoznaczn z swirdznim, ż js on zdolny do dosarczania właściwj informacji o pozycji i, ż insalacja na sakach odpowidnigo wyposażnia odbiorczgo js zgodna z wymaganiami SOLAS. Rapor podkrśla równiż, ż sakow wyposażni odbiorcz powinno być zgodn z ogólnymi wymaganiami dla sprzęu nawigacyjngo zawarymi w rzolucji [3],

6 uakualnionymi nasępni w rzolucji [4]. Szczgółow wymagania na odbiorniki dla sysmów GPS, różnicowgo GPS, GLONASS, różnicowgo GLONASS, Loran-C, Czajka, Omga wraz z różnicowym Omga oraz sysmu Dcca Navigaor zosały udosępnion producnom w clu umożliwinia im konsruowania akigo wyposażnia. Przdsawiono równiż wymagania ksploaacyjn dla globalnych sysmów radionawigacyjnych. Są o wymagania charakru ogólngo, aby mogły być spłnion przz szrg różnych sysmów. Wszyski sysmy powinny umożliwiać wykorzysywani przz niograniczoną liczbę saków. Dokładność okrślania pozycji, w najgorszym przypadku, powinna odpowiadać sandardom zawarym w rzolucji []. Sysm GPS umożliwia okrślani pozycji, prędkości poruszania się oraz czasu. Jgo opraorm, z raminia władz Sanów Zjdnoczonych są Siły Powirzn go pańswa. Sysm uzyskał płną zdolność działania w 199 roku i podlga programowi modrnizacji przwidzianmu na laa Nalży oczkiwać, ż usługi sysmu GPS będą dosępn w dającj się przwidzić przyszłości w skali globalnj i bz bzpośrdnich opła z srony użykowników. Sany Zjdnoczon zakładają możliwość, co najmnij 6-cio lnigo okrsu wypowidznia usług w przypadku zakończnia działania sysmu lub jgo likwidacji. Powszchni dosępn usługi GPS spłniają wymagania dla nawigacji ogólnj z dokładnością w poziomi wynoszącą 100 m. W związku z ym GPS zosał uznany jako komponn globalngo sysmu radionawigacyjngo WWRNS (World-Wid Radionavigaion Sysm) dla wykorzysania do nawigacji morskij, za wyjąkim opracji związanych z podchodznim do porów i manwrowanim w nich oraz żglugi po wodach ograniczonych. Do bardzij prcyzyjnj nawigacji dokładność GPS, bz dodakowych środków wspomagających js niwysarczająca. GPS ni dosarcza równiż naychmiasowych osrzżń o wadliwym funkcjonowaniu sysmu. Wprowadzni korkcji różnicowj moż poprawić dokładność, w pwnych ograniczonych obszarach, do 10 m lub naw mnijszj warości, moż równiż umożliwić zwnęrzny monioring wiarygodności. Sysm GLONASS zosał uznany równiż jako komponn sysmu WWRNS po zadklarowaniu płnj dosępności dla zasosowań cywilnych, co najmnij do 2010 roku [6]. Moż on świadczyć usługi dla krajowych i zagranicznych użykowników cywilnych zgodni z isnijącymi zobowiązaniami. Usługi go sysmu spłniają wymagania nawigacji ogólnj z dokładnością okrślania pozycji w poziomi 4 m (9%). Bz dodakowgo wspomagania dokładność sysmu GLONASS ni js wysarczająca dla opracji związanych z podchodznim do porów i manwrowanim w nich. GLONASS ni dosarcza równiż naychmiasowych osrzżń o nisprawności sysmu. Wykorzysani środków wspomagających pozwala jdnak na znaczną poprawę zarówno dokładności jak i wiarygodności. Korkcja różnicowa moż poprawić dokładność do 10 m (9%) i dosarczyć zwnęrzngo monioringu wiarygodności. snij szrg inicjayw zmirzających do poprawinia dokładności i/lub wiarygodności sysmów GPS i GLONASS, poprzz zasosowani środków wspomagających. Przykładm go moż być sosowani różnych sygnałów z korkcją różnicową (np. DGPS) oraz wykorzysani funkcji RAM (Rcivr Auonomous ngriy Monioring). Dodakowo opracowywan są równiż zingrowan odbiorniki sygnałów GPS, GLONASS, LORAN-C i/lub Czajka. Rozwijan są akż sysmy wspomagając, wykorzysując sygnały korkcji różnicowj rozsyłan przz saliy gosacjonarn; WAAS dla Sanów Zjdnoczonych, GNOS dla uropy i MSAS dla Japonii. 6

7 Omawiany rapor [1] zosał uakualniony w roku 199 w rzolucji [7], kóra uwzględnia zarówno wymagania dla nawigacji ogólnj związanj z żglugą ogólnoświaową jak równiż wymagania na sysm GMDSS, w zakrsi dosarczania informacji o pozycji saku. W nowj wrsji raporu zwrócono uwagę na pojawini się bardzo szybkich jdnosk pływających, akich jak nowoczsn promy, rozwijających prędkości powyżj 30 węzłów, kór mogą porzbować bardzij osrych wymagań doyczących lokalizacji. Rapor zawira równiż swirdzni, ż za wdrażani sysmów radionawigacyjnych odpowidzialn są rządy lub zainrsowan organizacj, kór powinny informować MO o goowości świadcznia usług i ich dosępności dla żglugi. MO powinno być równiż informowan w odpowidnim czasi o wszlkich zmianach mających wpływ na paramry sakowych urządzń odbiorczych. W roku 199 zosały równiż przyję uakualnion wymagania ksploaacyjn na odbiorniki sysmów Dcca Navigaor, Loran-C i Czajka oraz na sakow wyposażni odbiorcz sysmu GPS [6]. Zarówno MO jak i inni użykownicy, acy jak lonicwo cywiln, uznają porzbę rozwoju przyszłych sysmów w clu poprawinia, zasąpinia lub uzupłninia sysmów GPS i GLONASS, z względu na ich mankamny związan z wiarygodnością, dosępnością, srowanim oraz śrdnim czasm życia. W rzulaci, w 1997 roku MO przyjęło rzolucję A.860(20) p. Mariim Policy for Fuur Global Navigaion Sysm, okrślającą poliykę j organizacji w sosunku do przyszłgo globalngo sysmu nawigacji saliarnj (GNSS Global Navigaion Salli Sysm) [2]. W 2001 roku dokumn doyczący GNSS zosał uakualniony przz MO, a wprowadzon zmiany znalazły swoj odbici w rzolucji [8]. Rzolucja a okrśla porzbę wprowadznia cywilngo, będącgo pod konrolą międzynarodową oraz globalngo sysmu nawigacji saliarnj (GNSS), kóry będzi dosarczał informacji o pozycji saku na całj kuli zimskij. Zaznaczono, ż porzby morski odnośni sysmu GNSS ni ograniczają się jdyni do ogólnj nawigacji. Powinny być bran pod uwagę równiż inn morski zasosowania, przy czym ścisł rozdzilni usług nawigacji ogólnj od innych zasosowań morskich, związanych z nawigacją i pozycjonowanim, ni zawsz js możliw. Nalży równiż śldzić posęp prac prowadzonych przz Międzynarodową Organizację Lonicwa Cywilngo (CAO) w zakrsi wymagań loniczych odnośni GNSS. Poliyka MO okrśla rolę GNSS jako ogólnoświaowgo sysmu saliarngo dosarczającgo informacji o pozycji, prędkości poruszania się i czasi dla różnorodnych użykowników. Sysm objmuj odbiorniki użykowników, jdną lub więcj konslacji saliów, sgmny nazimn oraz organizację nadzorczą. Organizacja a powinna posiadać możliwości moniorowania i konroli dososowania sygnałów przwarzanych przz odbiorniki użykowników do spłniania okrślonych wymagań ksploaacyjnych. Jżli chodzi o użykowników morskich, międzynarodową organizacją, kóra będzi uznawała GNSS jako sysm spłniający biżąc wymagania sawian wyposażniu służącmu do okrślania pozycji w ramach sysmu WWRNS, js MO. Przwiduj się, ż obcni działając sysmy nawigacji saliarnj zachowają płną zdolność opracyjną do 2010 roku. Zadanim przyszłgo sysmu (sysmów) GNSS będzi poprawini, zasąpini lub uzupłniani obcni działających sysmów nawigacji saliarnj, kórych słab srony doyczą główni problmów wiarygodności, dosępności, konroli i śrdnigo czasu życia. 7

8 Użykownicy morscy będą sanowić jdyni nidużą część wilkij grupy użykowników przyszłgo sysmu GNSS i ich wymagania ni są najbardzij osr. Poncjalni największą grupę sanowią mobilni użykownicy lądowi. Wczśnijsz okrślni wymagań użykowników morskich ma na clu zapwnini, ż wymagania będą bran pod uwagę podczas rozwoju przyszłgo sysmu GNSS. Poniważ jdnak sysm GNSS znajduj się obcni dopiro w fazi projkowj, wymagania sprowadzają się jdyni do podsawowych wymagań użykownika, bz okrślania srukury organizacyjnj oraz archikury sysmu. W wyniku późnijszgo rozwoju sysmu, powinny być poddawan rwizji zarówno wymagania użykowników morskich, jak i procdury uznawania GNSS przz MO. 8

9 3. Sysm GALLO podsawow informacj Pomysł włącznia się Unii uropjskij w rozwój chnologii nawigacji saliarnj dauj się na począk la 90-ych, a głównych przyczyn innsyfikacji działań w ym zakrsi nalży szukać przd wszyskim w świadomości poncjalnych korzyści, jaki o zainrsowani moż przyniść zarówno w skorz cywilnym, naukowym, czy ż obronności. nn powody o oczywiści gwałowny wzros zaporzbowania na usługi z skora nawigacji saliarnj, a akż nidoskonałości isnijących już sysmów, czyli przd wszyskim GPS oraz, w nico mnijszym zakrsi, GLONASS. Oba są sysmami o czyso wojskowym pochodzniu, z kórych co prawda udosępniono część funkcji dla użykowników cywilnych, jdnak ich wojskow korzni są w dalszym ciągu nadrzędn. Skukuj o ym, iż ni mogą on zagwaranować cywilom go, co gwaranują użykownikom wojskowym, a mianowici ciągłości i poprawności pracy w skali globalnj. Dodakowo użykownik ni ma możliwości ocny jakości i wiarygodności orzymywanych wiadomości, kór przciż mogą poncjalni być znikszałcon lub naw błędn, co moż być skukim np. awarii saliy. Tn osani czynnik js szczgólni isony w przypadku aplikacji kryycznych, związanych z bzpiczńswm życia ludzkigo (np. nawigacja lonicza przy podchodzniu do lądowania), a brak możliwości jgo ralizacji skukował ym, ż wykorzysani nawigacji saliarnj w go ypu zasosowaniach było bardzo ograniczon w sosunku do rzczywisych porzb. Jak posanowiono jszcz na api usalania najbardzij ogólnych założń nowgo sysmu, miałby on być wolny od wyszczgólnionych powyżj wad, dając nawigacji saliarnj zilon świało dla kspansji j chnologii w obszary, w kórych jj sosowani było z różnych powodów nimożliw i w połączniu z znakomiymi paramrami pracy umożliwi znaczn zwiększni poncjalngo grona odbiorców usług nawigacyjnych. Zgodni z założniami, prac nad uropjskim wkładm do globalngo sysmu nawigacji saliarnj GNSS miały przbigać w dwóch apach. Pirwszym krokim było opracowani sysmu GNOS (uropan Gosaionary Navigaion Ovrlay Srvic), kóry miał być odpowidnikim amrykańskigo WAAS i japońskigo MSAS i podobni jak on płnić funkcję swoisj nakładki na GPS (wnualni GLONASS), dosarczając użykownikom informacji o wiarygodności wiadomości nawigacyjnych wysyłanych przz GPS, a akż zapwnini danych nizbędnych do wnualngo skorygowania nipoprawnych informacji. Jdnym słowm sysm n pośrdnicwm sgmnu kosmiczngo oraz sici sacji nazimnych, odpowiada za ulpszni podsawowych paramrów jakościowych GPS, j. dokładności, ciągłości, dosępności i wiarygodności, w aki sposób, aby były on zgodn z osrymi wymaganiami jakościowymi sawianymi aplikacjom kryycznym, szczgólni związanym z ransporm. Działani sysmu opira się na korkcji różnicowj. Jdnakż już w roku 1994, gdy rodziły się podsawow zarysy przyszłgo GNSS, było jasn, ż GNOS ni js sysmm doclowym, lcz jdyni swoisym przarcim szlaku na drodz ku pirwszmu globalnmu, będącmu w całości pod cywilną konrolą pańsw uropjskich, w płni funkcjonalnmu sysmowi nawigacji saliarnj GALLO. Właśni opracowani i wdrożni go sysmu sanowi drugi ap prac nad GNSS. da prac nad GALLO była odzwircidlnim posulau zapwninia nizalżności uropy w dzidzini nawigacji saliarnj od sysmów isnijących, lcz będących poza konrolą pańsw uropjskich. Rzcz jasna, dla ralizacji ych clów, sam sysm GNOS był niwysarczający. Koniczn było sworzni zarysów w płni funkcjonalngo sysmu nawigacyjngo, pozwalającgo na implmnację usług i aplikacji zgodni z uropjskimi wymaganiami i pozosającgo pod konrolą uropy. Pojęci pod konrolą uropy nalży w ym wypadku rozumić jako nadzór Komisji uropjskij jako całości, ni zaś jdngo wybrango kraju. Js o oczywiści odminn podjści, niż w przypadku isnijących 9

10 sysmów, będących pod wyłącznym nadzorm jdngo kraju (GPS Sany Zjdnoczon, GLONASS Rosja) i gwaranując szrg korzyści [9]. Przd wszyskim pozwoli o uniknąć syuacji poncjalngo uzalżninia krajów korzysających z chnologii saliarnj od krajów nadzorujących ją; js oczywis, jaki skuki mogło by mić aki uzalżnini w wypadku wykorzysywania nawigacji saliarnj dla porzb miliarnych czy szroko rozumianj obronności. Dodakowo GALLO zaofruj użykownikom bardzo szroką gamę usług o różnych poziomach jakości wraz z sysmm konroli wiarygodności (oprócz usług podsawowych, analogicznych do ofrowanych choćby przz GPS). Znacząco, w porównaniu do isnijących sysmów, poprawi się pokryci Zimi sygnałm saliarnym i co za ym idzi dosępność do usług nawigacyjnych. W szczgólności, odpowidni rozmiszczni saliów na orbiach umożliwi pokryci naw obszarów podbigunowych (okolic 7 równolżnika). Sysm będzi w płni nizalżny od GPS-u, jdnak będzi możliwa wzajmna współpraca ych sysmów, co więcj przwiduj się, ż rminal dwusysmow (GALLO+GPS) będą sandardm. Oczywiści aki podjści dodakowo zwiększy jakość ofrowanych usług; ponado możliwa będzi koopracja GALLO z sysmami komórkowymi (GSM, UMTS), jak i innymi sysmami nawigacyjnymi (LORAN- C). Poniżj przdsawiono skrócony chronologiczny przgląd wydarzń związanych z opracowywanim koncpcji i wdrażanim GALLO [10] 1994 rok Komunika Komisji uropjskij o udzial uropy w opracowywaniu globalngo sysmu nawigacji saliarnj - wyszczgólniono dwa główn apy pracy, j. GNSS1 (GNOS) i GNSS2 (GALLO) Opracowywani założń wsępnych w ramach prac dwóch głównych organów odpowidzialnych za projk GALLO: Komisję uropjską i uropjską Agncję Kosmiczną (SA). Uworzni forum GNSS-2 mającgo na clu wymianę widzy i doświadczń przy pracach koncpcyjnych Opracowywani wymagań prac zmirzając do opracowania szczgółowj koncpcji przyszłgo sysmu (w ym okrsi m.in. ralizacja projków: GALA globalna archikura sysmu, GaliloSa wymagania co do sgmnu kosmiczngo, GMNUS wymagania odnośni usług, NTG ingracja sysmu GNOS, SARGAL analiza wykorzysania GALLO do akcji poszukiwawczych i raowniczych, GUST cryfikacja odbiorników sysmu; ponado prac oczyły się w kilku grupach ksprckich) ngocjacj pomiędzy krajami uropjskimi odnośni przysąpinia do projku, w ym szacowani koszów przdsięwzięcia 21 maja 2002 powołani organizacji Galilo Join Undraking, koordynującj prac projkow sysmu GALLO -6 grudnia 2002 posidzni Rady Transporu omawiając kluczow kwsi ralizacji projku, w ym dfinicj usług, plan doboru opymalnych częsoliwości, sanowisko wobc krajów rzcich zainrsowanych współpracą (Rosja, Chiny), a akż współdziałani z USA dla zapwninia zgodności GALLO i GPS ciąg dalszy ngocjacji międzynarodowych, akż w kwsii finansowania przdsięwzięcia, w ym:1 maja 2004 przysąpini Polski i dziwięciu innych krajów do Unii uropjskij, a akż włączni ych pańsw w program GALLO i prac Galilo Join Undraking 28 grudnia 200 wysrzlni pirwszgo saliy GALLO GOV A pirwszy krok w budowaniu sgmnu kosmiczngo przyszłgo sysmu 10
.")
11 2008 (?) planowani uruchomini sysmu GALLO dla użykowników. Do go czasu nizbędn będą aki działania, jak sworzni sgmnu kosmiczngo uformowani płnych konslacji saliów, budowa sacji nazimnych oraz sici komunikacyjnj między sacjami nazimnymi a sgmnm kosmicznym. Z uwagi na zaisniał w między czasi opóźninia wydaj się jdnak, ż bardzij prawdopodobnym rminm uruchominia GALLO js rok W dalszj części ninijszgo rozdziału omówiona zosani archikura sysmu GALLO, jak równiż przwidywan usługi. Widza a js nizbędna dla dalszych rozważań odnoszących się do koncpcji odbiornika GALLO Archikura sysmu GALLO Na api opracowywania koncpcji sysmu jdnym z ważnijszych posulaów było zapwnini możliwi lasycznj srukury, ak aby w razi porzby była możliwa ława rozbudowa sysmu, a akż umożliwini współpracy GALLO z innymi sysmami. Dodakowym posulam było zapwnini możliwości ralizacji szrgu usług ofrowanych przz sysm, a akż wnualnych modyfikacji i dodawania nowych usług. Gnralni wyróżnić można podsawowych komponnów archikury sysmu, j.: składniki (komponny) globaln, składniki (komponny) lokaln, składniki (komponny) rgionaln, sgmn użykownika GNOS. Archikura GALLO zosała przdsawiona na rys. 1. SKŁADNK LOK ALN SKŁADNK G LOBALN Sgmn kosmiczny SK ŁADNK RGONALN GSS TT&C S-Band MUS Uplink C-Band Sgmn nazimny GCS + MCS Sarch & Rscu (SAR) SGM NT U ŻYTKOW NKA Rys. 1. Archikura GALLO [na pods. 11, 12]. 11

12 Jak wspomniano, planowana archikura sysmu GALLO js ściśl powiązana z usługami, kór będą ofrowan po uruchominiu sysmu. Na rys. 2 przdsawiono archikurę w ujęciu usługowym. Cnra usługow (Srvic Cnrs) Komponny GALLO Komponny zwn. Saliy GO Sgmn kosmiczny Sysmy nawigacyjn Uplink Saions Sacj konroln Sacj rfrncyjn Sacj uplink Komponny rgionaln (np. GPS, GLONASS) Sacj rfrncyjn Galilo Conrol Cnr (GCC) Sysmy radiokom. Masr Conrol Cnr GNOS Sgmn nazimny Komponny globaln COSPAS -SARSAT Sarch & Rscu GSM, UMTS Komponny sysmow Komponny lokaln Sgmn użykownika Komponny lokaln Komponny lokaln Sgmn użykownika Usługi Usługi GNOS Usługi lokaln Usługi saliarn Usługi miszan Rys. 2. Archikura GALLO w ujęciu usługowym [na pods. 13] Komponny archikury GALLO Komponny globaln worzą rdzń sysmu i skupiają lmny nizbędn do właściwgo funkcjonowania GALLO. Można j podzilić na sgmn kosmiczny (spac sgmn) i sgmn nazimny (ground sgmn). Sgmn kosmiczny składa się z 30 saliów rozmiszczonych równomirni na rzch kołowych orbiach śrdnich MO (Mdium arh 12

13 Orbi), z czgo 27 (j. po 9 na każdj z 3 orbi) płni funkcję saliów roboczych, naomias pozosał 3 są akywnymi saliami zapasowymi na wypadk awarii kórgoś z saliów roboczych. Tgo ypu układ nazywany js konslacją Walkra 27/3/1 (rys. 3). Rys. 3. Konslacja saliów GALLO. Saliy umiszczon są ponad km nad Zimią, okrs obigu wynosi 14 godzin 22 minuy, zaś ką inklinacji orbi wynosi 6. Jak już wspominano, ak duża liczba saliów (w GPS 24 saliy na 6 orbiach), jak ż ich rozmiszczni korzysni wpływa na dosępność sygnałów nawigacyjnych równiż w rudno dosępnych mijscach Zimi. Salia, kórgo przwidywany czas życia o około 20 la, js zbudowany z plaformy i dwóch zasadniczych modułów (ang. payload): nawigacyjngo i odpowidzialngo za funkcj poszukiwawczoraowicz (sarch and rscu). Ważną kwsią js zapwni wysoko sabilnych zgarów; w przypadku GALLO zdcydowano się wykorzysać 4 zgary: dwa opar na oscylaorach rubidowych i dwa wykorzysując birn masry wodorow (Passiv Hydrogn Masr PHM) [12]. W sgmnci nazimnym z koli można wyróżnić dwa nizalżn lmny, j. podsgmn konroli saliów GCS (Ground Conrol Sysm) oraz podsgmn konroli misji MCS (Mission Conrol Sysm), zaś nad całością nadzór sprawować będą dwa zlokalizowan w uropi cnra konroli GCC (Galilo Conrol Cnr). Pod pojęcim konroli saliów nalży rozumić urzymywani właściwj ich konslacji oraz nadzór nad sanm chnicznym, a akż organizowani w razi koniczności napraw saliów, z koli konrola misji skupia aki funkcj jak: wyznaczani orbi, synchronizacja czasu, worzni i rozsyłani za pośrdnicwm sgmnu kosmiczngo informacji o wiarygodności wiadomości nawigacyjnych ingriy. Komponn GCS do komunikacji wykorzysuj sacj TT&C zapwniając dwukirunkową łączność z saliami w pasmi S oraz jdnokirunkową w pasmi C sić a nosi nazwę Galilo Uplink Saions (GUS); z koli sgmn konroli misji MCS korzysa z 20 nazimnych sacji snsorowych GSS (Galilo Snsor Saion), rozsianych po całym świci. ch zadanim js odbiór sygnału saliarngo, a akż dodakowych danych (np. morologicznych), kór są nasępni przkazywan do GCC clm dalszgo przwarzania, w ym ocny wiarygodności wiadomości nawigacyjnych. Dodakowo MCS wykorzysuj sacj TT&C pracując w paśmi C (jdnokirunkow). Sić złożona z ych sacji oraz GSS nosi nazwę Mission Uplink Saion (MUS). Koljnym lmnm archikury GALLO są zw. komponny lokaln. Spcyfikacja sysmu umożliwia worzni lokalnych lmnów przysosowanych do warunków i 13
, jak ż ich rozmiszczni korzysni wpływa na dosępność sygnałów nawigacyjnych równiż w rudno dosępnych mijscach Zimi.")
14 wymagań doyczących ylko wybrango obszaru. Polga o na adapacji lokalnych lmnów infrasrukury na porzby zasosowań spcjalisycznych, np. obsługa loniska, poru, ip., ak, aby orzymany podsysm charakryzował się dużo lpszymi paramrami, niż klasyczny sysm GALLO byłby w sani zaofrować. W szczgólności paramry powinny być zgodn z wymaganiami sawianymi przy obsłudz ak isonych obików jak wspomnian loniska czy pory. Przwiduj się, ż go ypu lmny lokaln będą wykorzysywać ni ylko GALLO, czy inn sysmy nawigacji saliarnj, al akż sysmy radiokomunikacyjn (GSM, UMTS) czy radiow sysmy nawigacyjn (LORAN-C). Wszyski go ypu lokaln podsysmy zapwniając polpszni w skali lokalnj prcyzji pozycjonowania, okrślania czasu, ciągłości, dosępności i wiarygodności, rakowan jako całość są okrślan jako komponny lokaln. Koljnym lmnm archikury GALLO są zw. komponny rgionaln, czyli zspół sacji nadzorujących lokalni wiarygodność informacji (ingriy) przsyłanych w sysmi. Jak już wspomniano, sysm GALLO sam przsyła aki informacj w skali globalnj, jdnak w nikórych przypadkach wymagania sawian danj usłudz są większ i mogą ni być spłnion za pośrdnicwm jdyni sgmnu globalngo. W akij syuacji dzięki komponnom rgionalnym można wyznaczać informacj o wiarygodności ylko dla pwngo obszaru, a nasępni przsyłać j za pośrdnicwm saliów GALLO do odbiorców konkrnych usług. Podsawow funkcj sysmu GNOS zosały zasygnalizowan w wczśnijszj części opracowania. W clu wyliminowania poncjalnych niprawidłowości funkcjonowania całości sysmu planuj się, ż GNOS będzi oddzilony od komponnów globalnych GALLO. Osani lmn, j. sgmn użykownika, sanowią wszyski odbiorniki sygnałów miowanych przz saliy GALLO Usługi GALLO Sysm GALLO ma charakryzować się znaczni większym, niż doychczasow sysmy, nasawinim na usługi. ch dobór był poprzdzony grunownymi badaniami rynku i analizą porzb jak najszrszj grupy poncjalnych użykowników, poczynając od wilkich korporacji, poprzz naukowców, sgmn rządowy, aż do użykowników cywilnych korzysających z prosych i anich odbiorników. W fkci zdfiniowano 4 główn klasy usług GALLO (GALLO srvics) [13]: 1. usługi saliarn (salli-only srvics) 2. usługi lokaln (locally assisd srvics) 3. usługi GNOS (GNOS srvics) 4. usługi miszan (GALLO combind srvics) Poniżj wszyski czry kagori usług zosaną króko scharakryzowan. W ramach usług saliarnych (salli-only srvics) wyróżnić można nasępując podkagori usług: usługi owar (Opn Srvic), usługi bzpiczńswa życia (Safy-of-Lif Srvic), usługi komrcyjn (Commrcial Srvic), usługi na rzcz służb pańswowych (Public Rgulad Srvic), 14
 czy radiow sysmy nawigacyjn (LORAN-C).")
15 usługi poszukiwania i raownicwa (Sarch and Rscu Srvic). Usługi owar (opn srvic, OS) zapwniają możliwość pozycjonowania, okrślania prędkości oraz czasu dla zasosowań ni profsjonalnych i są dosępn za darmo pod warunkim posiadania odpowidnigo odbiornika (prosgo i rlaywni anigo). Typow zasosowania o np. nawigacja w samochodzi czy lfoni komórkowym. Jakość usług OS będzi porównywalna z jakością podobnych usług ofrowanych przz już isnijąc sysmy nawigacji i będzi mogła być dodakowo zwiększona dzięki używaniu odbiorników dwusysmowych (GALLO + GPS), kór w momnci uruchominia sysmu mają sać się sandardm. W clu ralizacji usługi owarj sygnały prznosząc nizbędn informacj będą rozdzilon na osi częsoliwości clm zapwninia rdukcji błędów wynikających z wpływu jonosfry. Na obu częsoliwościach będą przsyłan ciągi rozpraszając (składowa synfazowa i kwadraurowa). Jdna z składowych będzi dodakowo prznosić dan, zaś druga ni prznosząca danych (sygnał piloowy) ma na clu uzyskani większj prcyzji pomiaru. Usługi bzpiczńswa życia (safy of lif, SoL) są skirowan w obszary, w kórych poncjalni moż dojść do zagrożnia bzpiczńswa czy życia ludzkigo (np. nawigacja morska i lonicza, obsługa ransporu koljowgo, ip.). Dokładność pozycjonowania w przypadku usług SoL będzi na podobnym poziomi jak w przypadku usług owarych, jdnak w skali globalnj ralizowana będzi usługa wiarygodności (ingriy), pozwalająca na ocnę poprawności i w razi porzby skorygowani wiadomości nawigacyjnych. Właśni implmnacja usługi ingriy js podsawowym czynnikim odróżniającym usługi SoL od OS. W przypadku sosowania dwuczęsoliwościowych odbiorników planuj się zapwnini gwarancji poprawngo funkcjonowania usługi SoL. Przwiduj się wprowadzni dwóch poziomów ralizacji funkcji wiarygodności: kryyczngo (np. prowadzni pionow w lonicwi) oraz nikryyczngo (np. nawigacja płnomorska) [14]. Usługi komrcyjn (commrcial srvic, CS) są usługami zasrzżonymi, przznaczonymi dla zasosowań komrcyjnych i profsjonalnych, w kórych wymagana js jakość znaczni przwyższająca ofrowaną w usługach powszchni dosępnych. Dosęp do usług js płany i wymaga posiadania spcjalngo odbiornika, zaś auoryzacja ma się opirać na wykorzysaniu okrślongo klucza kodowgo. W ym wypadku łączni z sygnałami dosępnymi dla wszyskich użykowników, nadawan będą dwa sygnały zabzpiczon algorymm szyfrującym. Usługi na rzcz służb pańswowych (public rgulad srvic, PRS) są osanią grupą usług zasrzżonych wyłączni dla służb ochrony cywilnj, wojska, zapobigania przsępczości, ip. W ym wypadku najważnijszym wymaganim sawianym usłudz js zabzpiczni sygnału przd podsłuchm oraz clową niuprawnioną modyfikacją, a akż zapwnini ciągłości pracy sysmu. Dysrybucja odbiorników ddykowanych dla usług z grupy PRS, jak i algorymy szyfrowania sygnału będą lżć w domni rządowj. Dla ralizacji usługi PRS przwidzian inn zakrsy częsoliwości, niż w przypadku usług owarych, aby umożliwić sały dosęp do usługi PRS, naw w syuacji gdy usługa owara js lokalni nidosępna. W ab.1 zsawiono podsawow charakrysyki jakościow usług GALLO. 1
,")
16 Dokładność pozycjonowania (h w poziomi, v w pioni) Tabl. 1. Charakrysyki jakościow usług saliarnych GALLO [11]. Usługi owar (OS) Usługi komrcyjn (CS) Usługi na rzcz służb pańswowych (PRS) Usługi bzpiczńswa życia (SoL) Pokryci Globaln Globaln Lokaln Globaln Lokaln Globaln h=4m, v=8m (odb. dwuczęs.) <10cm (lokalni wzmocnion sygnały) 1m (lokalni wzmocnion sygnały) <1m (odb. h=6,m, v=12m h=1m, v=3m dwuczęs.) (odb. jdnoczęs.) Dosępność 99,8% 99,8% 99-99,9% 99,8% Ni Tak Tak Wiarygodność (ingriy) W zalżności od rodzaju usługi 4-6m (odb. dwuczęs.) Koljną klasą usług są zw. usługi lokaln (Locally Assisd Srvics). soą j klasy usług js dodakow polpszani paramrów usług saliarnych (usługa owara, komrcyjna, bzpiczńswa życia i usługa na rzcz służb panswowych) dzięki funkcjonowaniu lmnów lokalnych sysmu. Dokładn scharakryzowani i zdfiniowani usług nalżących do j kagorii wymaga szczgółowych badań rynku, analiz aspków konomicznych i uwarunkowań prawnych, ym nimnij już raz przwiduj się wdrożni czrch ogólnych podkagorii usług lokalnych, j.: 1. Lokalna usługa nawigacji prcyzyjnj (Local Prcision Navigaion Srvic) wykorzysan będą komponny lokaln, kór dzięki zasosowaniu korkcji różnicowj będą ofrować usługi okrślania pozycji z błędm poniżj 1 mra, a akż umożliwią znacząc poprawini paramrów usługi wiarygodności (ingriy). 2. Lokalna usługa nawigacji wysoko-prcyzyjnj (Local High-Prcision Navigaion Srvic) dzięki wykorzysaniu rzch nośnych możliwa będzi prcyzja pozycjonowania rzędu pojdynczych cnymrów. Dalszych analiz wymaga naomias wpływ j usługi na paramry usługi wiarygodności. 3. Usługa nawigacyjna wspomagana lokalni (Locally Assisd Navigaion Srvic) poprzz rdukcję ilości informacji konicznych do zdkodowania przz rminal użykownika, można będzi zwiększyć dosępność sygnałów saliarnych (Signal-in- Spac). 4. Usługa o lokalni zwiększonj dosępności (Locally Augmnd Availabiliy Srvic) zakłada wykorzysani sacji lokalnych miujących sygnał saliarny (psudosaliarny) dla zwiększnia dosępności sygnału na konkrnym obszarz. Js o szczgólni ison z punku widznia ralizacji usług w rudnych środowiskach lub w przypadku wysokich wymagań odnośni dosępności sygnału (np. nawigacja przy podchodzniu samolou do lądowania). Koljną klasą usług są zw. usługi GNOS. Do podsawowych funkcji ralizowanych za pośrdnicwm ych usług nalży: korkcja różnicowa zwiększająca prcyzję pozycjonowania sysmów GPS i GLONASS, a akż ralizacja usługi wiarygodności (ingriy), czyli ciągł moniorowani wiadomości przsyłanych przz sysm i informowani o zaisniałych niprawidłowościach i błędach. Osanią klasą usług są usługi miszan, kór o korzysają z jdnj z podsawowych cch charakryzujących przyszły sysm, a mianowici lasyczności i możliwości współdziałania (inroprabiliy) z innymi sysmami. Dzięki zasosowaniu akigo podjścia, usługi umożliwiają zaspokojni porzb najbardzij wymagających użykowników, rdukcję pwnych słabości samgo sysmu 16
 Dosępność 99,8% 99,8% 99-99,9% 99,8% Ni Tak Tak Wiarygodność (ingriy) W zalżności od rodzaju usługi 4-6m (odb. dwuczęs.) Koljną klasą usług są zw. usługi lokaln (Locally Assisd Srvics).")
17 nawigacji saliarnj, a akż znaczn poszrzni konomicznj i rynkowj arakcyjności nowgo sysmu. Gnralni można wyróżnić dwi kagori usług miszanych: 1. Usługi wynikając z współpracy GALLO z innym sysmm GNSS (np. GPS, GLONASS, SBAS, GBAS). W fkci korzysamy z znaczni rozszrzongo sgmnu kosmiczngo, co wpływa na zwiększni dosępności sygnału saliarngo i w dalszj koljności przkłada się na jakość usługi. Ponado sysmy SBAS zapwniają ralizację usługi wiarygodności dla sygnałów GPS i GLONASS. nną korzyścią js uzyskani zapasowj infrasrukury, co js wymagan zwłaszcza w przypadku ralizacji usług bzpiczńswa życia. 2. Usługi wynikając z współpracy GALLO z sysmami innymi niż GNSS (non- GNSS). Koljna grupa usług miszanych wykorzysuj sysmy nawigacyjn (np. LORAN-C), radiokomunikacyjn (UMTS) lub ż sici snsorow. Korzyści z punku widznia prcyzji lokalizacji, jaki uzyskać można zapwniając współpracę GALLO z GPS obrazuj abl. 2. (m.a. masking angl). Tabl. 2. Porównani jakości usług GALLO w konkści współpracy sysmu z GPS-m. Dokładność w poziomi [m] Dokładność w pioni [m] GALLO OS (10 m.a) Odbiornik jdnoczęs. GALLO OS +GPS (10 m.a) Odbiornik jdnoczęs. GALLO OS (10 m.a) Odbiornik dwuczęs. GALLO OS +GPS (10 m.a) Odbiornik dwuczęs. GALLO OS (30 m.a) Odbiornik jdnoczęs. GALLO OS +GPS (30 m.a) Odbiornik jdnoczęs Sygnały GALLO Nawigacyjn sygnały sysmu GALLO będą przsyłan w czrch pasmach częsoliwościowych, nalżących do zakrsu przydzilongo dla RNSS (Radio Navigaion Salli Srvics). Sygnały zosały zobrazowan na rys.4. Rys. 4. Częsoliwości wykorzysywan w sysmi GALLO. 17

18 W ogólności przwiduj się wykorzysani 10 sygnałów nawigacyjnych i jdngo sygnału SAR. Taka ilość sygnałów wynika przd wszyskim z dużj liczby planowanych usług, ransmiowan sygnały będą mapowan (przydzilan) na porzby konkrnych usług, prznosząc informacj nizbędn dla ich prawidłowj ralizacji. W prakyc każdy z czrch podsawowych sygnałów (j. a, b, 6 i L1) js rozdzilony na dwa ( i Q) lub rzy (A,B,C) kanały płniąc różn funkcj. W poniższj abli (abl. 3) zsawiono podsawow paramry wszyskich sygnałów GALLO z uwzględninim przydzilania ich do poszczgólnych usług ypu Salli-only. Tabl. 3. Sygnały GALLO i ich mapowani na poszczgóln usługi [1]. Nr Nazwa Typ Chip ra [Mc/s] Symbol ra [Ms/s] Modulacja Usługi 1 a () Dan 10 0 OS/SoL 2 a (Q) Pilo 10 - OS/SoL AlBOC(1,10) 3 b () Dan OS/SoL/CS 4 b (Q) Pilo 10 - OS/SoL/CS 6 (A) Dan N/A N/A N/A PRS 6 6 (B) Dan 1000 CS 7 6(C) Pilo - BPSK() CS 8 2-L1-1(A) Dan N/A N/A N/A PRS 9 2-L1-1(B) Dan 1 20 OS/SoL/CS 10 2-L1-1(C) Pilo 1 - BOC(1,1) OS/SoL/CS 11 L6 Dan SAR Jak wynika z powyższj abli, nikór sygnały prznoszą zarówno ciągi rozpraszając (ranging cods), jak i dan nawigacyjn, inn zaś wyłączni ciągi rozpraszając. W ym drugim przypadku mówimy o zw. sygnałach piloowych. Wyjaśninia wymagają uży w abli oznacznia modulacji. BPSK(n) oznacza binarną modulację fazy połączoną z rozpraszanim widma przy szybkości podawania chipów (n 1.023) MHz. Z koli w przypadku modulacji BOC(m,n) (Binary Offs Carrir) i AlBOC(m,n) (Alrna BOC) mamy do czyninia z syuacją, w kórj nośna zmodulowana przz sygnał danych oraz przmnożona przz ciąg rozpraszający o szybkości (n 1.023) MHz, js dodakowo przmnożona przz prosokąną podnośną o częsoliwości (m 1.023) MHz. W przypadku klasycznj modulacji BOC wynikow widmo js rozdzilon na dwi części położon po lwj i prawj sroni częsoliwości nośnj. Z koli modulacja AlBOC skukuj ym, ż widmo ni js rozbi na dwi części, lcz po prosu przsunię w kirunku (na przykład) wyższj częsoliwości; możliw js równiż przsunięci składowj widma do niższj częsoliwości. W fkci można wykorzysać liski boczn widma sygnału do prznosznia różnych informacji [16]. W dalszj części omówion zosaną modulacj sygnałów GALLO, za wyjąkim opracji na sygnałach 6(A) oraz 2-L1-1(A), kór są wykorzysywan do usług PRS, dosępnych jdyni dla uprawnionych służb i informacj odnośni ych sygnałów ni są z go powodu w 18
 zsawiono podsawow paramry wszyskich sygnałów GALLO z uwzględninim przydzilania ich do poszczgólnych usług ypu Salli-only. Tabl. 3. Sygnały GALLO i ich mapowani na poszczgóln usługi [1].")
19 domni publicznj. W j syuacji, w przypadku sygnału 2-L1-1 będzimy się posługiwać uproszczonym rminm sygnał 1. Opis charakrysyk poszczgólnych sygnałów i ich przwarzania, a akż kodów js zgodny z opublikowaną w 2006 wsępną wrsją spcyfikacji sysmu [1]. W opisi charakrysyk sygnałowych GALLO zosaną zasosowan oznacznia, kór zbrano w abl. 4. Tabl. 4. Wyjaśnini znaczń poszczgólnych symboli wykorzysywanych w opisi sygnałów GALLO. Paramr Znaczni C X Y () Binarny ciąg rozpraszający (modulacja NRZ) D X Y () Binarny sygnał danych (modulacja NRZ) wiadomość nawigacyjna sc X Y () Binarna podnośna (modulacja NRZ) x y () Binarny komponn zawirający kod, podnośną (w okrślonych przypadkach) oraz dan (w okrślonych przypadkach); ( ) = C ( ) sc ( ) D ( ) X Y X Y X Y X Y s X () Znormalizowany sygnał pasmowy; s ( ) = s ( ) + j s ( ) c X Y, k X X X Q k-y chip ciągu rozpraszającgo d k-y symbol wiadomości nawigacyjnj X Y, k (danych) DC Liczba chipów na symbol X i L [ ] DC Y i modulo L i Część całkowia z i / DC rc T () Funkcja przyjmująca warość 1 dla 0 < < T i warość 0 w pozosałych przypadkach RS, X Częsoliwość podnośnj [Hz] Y Częsoliwość nośna [Hz] f X W abli X oznacza sygnał (, a, b, 6 lub 1), zaś Y oznacza składową dango sygnału (, Q, B lub C). 19
 Binarny ciąg rozpraszający (modulacja NRZ) D X Y () Binarny sygnał danych (modulacja NRZ) wiadomość nawigacyjna sc X Y () Binarna podnośna (modulacja NRZ) x y () Binarny")
20 Sygnał Przwarzani składowych sygnału przdsawiono na rys.. AlBOC ) ( C a ) ( C Q a ) ( C b ) ( C Q b ) ( D a ) ( D b ) ( s Rys.. Modulacja sygnału [1]. Jak widać poszczgóln składow powsają w nasępujący sposób: a - powsaj w wyniku połącznia sruminia danych nawigacyjnych a D z niszyfrowanym ciągim kodowym a C ; a Q - powsaj z ciągu kodowgo Q a C (kanał piloowy ni prznosi danych); b - powsaj w wyniku połącznia sruminia danych nawigacyjnych b D z niszyfrowanym ciągim kodowym b C ; b Q - powsaj z ciągu kodowgo Q b C (kanał piloowy). Upraszczając, można swirdzić, iż poszczgóln komponny składają się z zmodulowanych BPSK ciągów rozpraszających przmnożonych w odpowidnich kanałach przz sygnał danych. Rlacj można przdsawić za pomocą nasępujących wyrażń mamaycznych: [ ] [ ] [ ] [ ] [ ] [ ] + = + = + = + = = = = = i Q b C T i Q b Q b i b C T i b i b b i Q a C T i Q a Q a i a C T i a i a a T i rc c T i rc d c T i rc c T i rc d c Q b C Q b L b C b DC b L Q a C Q a L a C a DC a L ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) (,,,,,,,,,,,,,, (1)

21 21 Powyższ składow są nasępni wykorzysywan do uworznia szrokopasmowgo sygnału wyjściowgo z modulacją AlBOC (1,10). W modulacji j js sosowana prosokąna podnośna o częsoliwości MHz = 1.34MHz. Analiyczna formuła sygnału wyjściowgo ma posać: ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] 4) / ( ) ( ) ( ) ( ) / ( ) ( ) ( ) ( ) / ( ) ( ) ( ) ( ) / ( ) ( ) ( ) ( ) (,,,, s P P Q b b s P P Q a a s S S Q b b s S S Q a a T sc j sc j T sc j sc j T sc j sc j T sc j sc j s =, (2) gdzi składow Q b b Q a a,,, zosały zdfiniowan zalżnością (1), naomias składow Q b b Q a a,,, powsają w wyniku nasępujących opracji: = = = = Q a a b Q b Q a a Q b b Q b b a Q a Q b b Q a a (3) Z koli paramry S sc oraz P sc w wzorz (2) rprznują czrowarościową funkcję podnośnj dla składowych oraz odpowidnio, j.: ( ) ( ) + = + = = = i s T i P i s T i S T i rc AP sc T i rc AS sc S S /8, ) ( /8 ) (, 8 /, 8 /, 8, 8 (4) gdzi współczynniki i AS oraz i AP przyjmują warości jak w abl.. Tabl.. Warości współczynników i AS i i AP AS i AP i
22 Sygnał 6 Rys. 6. przdsawia sposób gnracji sygnału 6. D ( ) 6 B C ( ) 6 B ( ) 6 B 1 2 C ( ) 6 C ( ) 6C - s 6 ( ) Rys. 6. Modulacja sygnału 6 [1]. Składow B i C sygnału 6 powsają w nasępujący sposób: 6 B - powsaj w wyniku połącznia sruminia danych D B 6 C - powsaj z ciągu kodowgo C C są on opisan nasępującymi zalżnościami: 6 z ciągim kodowym C B 6 (kanał piloowy ni prznosi danych); 6 ; 6B 6C = = + i= [ c6b, i d6b,[ i] rct ( i TC, 6B) ] + [ c6c, i rct ( i T ] C C C, 6 C ) L 6 C, 6 i= L 6B DC 6B C, 6B () Wyjściowy sygnał 6 zawirający składow B i C js worzony zgodni z nasępująca zalżnością: s 1 ) = [ 6B( ) C ( )]. (6) 2 6( 6 22
23 Sygnał 1 Na rys. 7. przdsawiono sposób gnracji sygnału 1. sc 1 B ( ) D 1 B ( ) C 1 B ( ) 1 B ( ) 1 2 C 1 C ( ) 1 C ( ) - s ( 1 ) sc 1 C ( ) Rys. 7. Modulacja sygnału 1 [1]. Jak wynika z rysunku, składowa 1 B powsaj z wykorzysanim sruminia danych D 1 B modulujących ciąg rozpraszający C 1 B oraz podnośną sc 1 B, naomias składowa 1 C powsaj w wyniku połącznia ciągu rozpraszającgo C 1 C z podnośną sc 1 C, j.: 1B 1C ( ) = ( ) = + [ c1 B, i d1 B,[ i] rct ( i T ) [ ( ) ] C B sign RS B C B, 1 sin 2π, 1, 1 i= + [ c1 C, i rct ( i T ) [ ( ) ] C C sign RS C L C C C, 1 sin 2π, 1, 1 1 i= L1B DC1B W przypadku opracji na składowych B i C wykorzysywana js modulacja BOC(1,1), w kórj szybkość podawania chipów oraz częsoliwość prosokąnj podnośnj wynoszą odpowidnio 1.023Mc/s i 1.023MHz. Wynikowy sygnał 1, złożony z sygnałów B ( ) i C ( ) powsaj zgodni z zalżnością: s ) = [ 1 B( ) C ( )]. (8) 2 1( 1 (7) 3.3. Kody rozpraszając w sysmi GALLO W poniższym podrozdzial przdsawion zosaną podsawow informacj doycząc kodów rozpraszających (ranging cods) w sysmi GALLO. Są on worzon z połącznia zw. kodów podsawowych (primary) i drugorzędnych (scondary). Długości kodów są ściśl usalon i sał dla poszczgólnych składowych sygnałów, co przdsawiono w abl
24 Tabl. 6. Długości kodów rozpraszających dla poszczgólnych składowych [1]. Składowa Długość ciągu kodowgo [ms] Długość ciągu kodowgo [chipy] Kod podsawowy Kod drugorzędny a a-q b b-q B C Kody rozpraszając (podsawow) mogą być skwncjami psudoprzypadkowymi gnrowanymi przy wykorzysaniu rjsru z sprzężnim zwronym lub ż zw. opymalnymi skwncjami psudoprzypadkowymi (opimizd psudo-nois squncs). W pirwszym przypadku kody są gnrowan na podsawi dwóch M-skwncji, skracanych do wymaganj długości; mogą on być gnrowan na biżąco w rjsrach lub ż zgromadzon w pamięci. W drugim przypadku (opymaln skwncj psudoprzypadkow) kody muszą być gromadzon w pamięci. Ciągi kodów drugorzędnych są sał i usalon na szywno. Na rys. 8. przdsawiono sposób gnrowania ciągów kodowych w oparciu o kody podsawow i drugorzędn. Waro zauważyć, iż ciągi są worzon wdług srukury rzędowj (ird cods), w kórj o kody drugorzędn służą do modyfikacji koljnych powórzń kodu podsawowgo. Długość kodu podsawowgo: N Długość kodu drugorzędngo: N S Szybkość chipowa kodu pods.: fc Szybkość chipowa kodu drugorzędngo: f cs = f c /N /N f cs Kod drugorzędny (scondary) Zgar f c Kod podsawowy (prim ary) Kod wynikowy f c N chipów Kod podsawowy (primary) Okrs (poch) i Okrs (poch) i+1.. Okrs (poch) i+ns -1 Okrs (poch) i+ns Kod drugorzędny (scondary) 1. czip 2. czip.. Ns. czip Okrs kodu wynikowgo Rys. 8. Gnracja kodów w sysmi GALLO, na pods. [1]. 24
25 Ogólny schma rjsru gnrującgo ciągi kodu podsawowgo w oparciu o zw. M- skwncj zosał pokazany na rys. 9. Aby zapwnić pożądaną długość wynikowych ciągów (N), po N cyklach pracy zawarość dwóch rjsrów przsuwnych js rsowana i 1 R s = s,..., s, gdzi R inicjalizowana ponowni zw. warościami sarowymi (sar-valus) [ ] js długością rjsru przsuwngo. Do płngo opisu powyższgo rjsru nizbędna js znajomość położnia jgo odczpów. Na rys. 9. odczpy są zdfiniowan poprzz lmny wkora a = a, a,..., a, a ], j j j [ j, 1 j,2 j, R 1 j, R a j, i {0,1}, przy czym oczywiści zrowa warość a j, i oznacza brak połącznia, naomias jdynka oznacza wysępowani w danym mijscu odczpu. W dokumnacjach, kody (a ściślj mówiąc, rjsry gnrując kody) są najczęścij zdfiniowan za pomocą opisu wilomianowgo (w noacji okalnj), kóry ławo można przransformować do posaci wkora a, uzyskując w n sposób widzę o położniu koljnych sprzężń w rjsrz j przsuwnym. Sposób posępowania js nasępujący: okalną dfinicję rjsru nalży zapisać w posaci binarnj, a nasępni zliczyć orzyman biy od prawj srony, zaczynając od i = 0 (LSB najmnij znaczący bi), a kończąc na i = R (MSB najbardzij znaczący bi), gdzi R js długością rjsru. Nasępni i-y zliczony bi rprznuj i-y lmn wkora a,, dla i = 1,..., R. i j j Rys. 9. Ogólny schma rjsru gnrującgo ciągi pirwon [1]. 2
26 Nalży podkrślić, ż zliczani biów zaczynało się od zra, naomias przypisywani biów koljnym lmnom wkora a i, j odbywa się od i = 1. Warość a j, R js zawsz równa jdności. Procs n (dla przykładowj warości wilomianu) przdsawiono na rys Zapis wilomianowy (okalny) MSB LSB Zapis binarny Odczpy rjsru a j,1 a j,2 a j, 13 a j, 14 = a j, R Rys. 10. Przykład ransformacji zapisu okalngo dfiniującgo rjsr przsuwny na posać wkora a. j Nico inny sposób posępowania obowiązuj w przypadku przkszałcania ósmkowj posaci zw. warości sarowych w odpowiadając im poziomy logiczn. Aby go dokonać, w pirwszj koljności nalży okalny zapis wyrazić w posaci binarnj, a nasępni zliczać biy począwszy od i = 1 (LSB) aż do i = R (MSB), gdzi R ponowni oznacza długość i rjsru. Po ym zliczniu i-y bi odpowiada lmnowi s j wkora przdsawiono przykładową ralizację opisanj procdury (rys. 11). s j. Poniżj Zapis wilomianowy (okalny) MSB LSB Zapis binarny Warości sarow 1 s 2 2 s 13 2 s 2 Rys. 11. Przykład ransformacji zapisu okalngo warości sarowych na odpowiadając im warości logiczn. 14 s 2 Szczgółow zsawini wszyskich kodów w sysmi GALLO znajduj się w spcyfikacji [7]. Dokumn zawira wszyski wilomiany okaln dfiniując sprzężnia, jak i warości sarow, a akż zsawini kodów drugorzędnych. 26
27 Waro dodać, iż ni js jszcz przsądzony sposób przypisania konkrnych numrów kodów podsawowych i drugorzędnych do konkrnych saliów. Być moż zosani o uzupłnion wraz z nasępną akualizacją spcyfikacji sysmu Ogólna srukura wiadomości przsyłanych w sysmi GALLO W sysmi GALLO wykorzysuj się 4 rodzaj wiadomości: F/NAV (Frly Accssibl Navgaion) zawirając podsawow informacj nawigacyjn dosępn dla wszyskich użykowników, /NAV (ngriy Navigaion) zawirając dan nizbędn dla ralizacji usługi wiarygodności (ingriy), C/NAV (Commrcial Navigaion) zawirając dan wymagan dla ralizacji usług komrcyjnych, G/NAV (Govrnmn Accss Navgaion) zawirając dan przznaczon dla odbiorców usługi PRS. Z punku widznia ypowych zasosowań sysmu GALLO najważnijsz wydają się być dwi pirwsz klasy wiadomości, j. F/NAV (prznoszona w kanal a-) oraz /NAV (prznoszona w kanałach b- i 1-B). Podsawową jdnoską składową wiadomości nawigacyjnj js zw. srona (pag). Okrślona liczba sron worzy podramkę (sub-fram), kilka podramk worzy ramkę (fram), naomias komplna wiadomość nawigacyjna js zbudowana z skwncji ramk. Przykładowo, w wypadku wiadomości F/NAV, jdna ramka, kóra rwa 600 skund, składa się 12 podramk (po 0 skund każda), zaś jdna podramka zawira sron. Czas rwania jdnj srony wynosi 10 skund. Ogólny forma srony przdsawiono na rysunku poniżj. Synchronizacja N Symbol M Łączni symboli N+M Srona danych M/2 Łączni biów M/2 Rys. 12. Srukura srony (pag). Jak widać, srona rozpoczyna się od pola synchronizacji zawirającgo unikalną, sałą skwncję N symboli. Js o wykorzysywan w odbiorniku dla uzyskania synchronizacji z granicami srony. Skwncj synchronizacyjn dla podsawowych rodzajów wiadomości (F/NAV, /NAV) pokazano w abl. 7: Tabl. 7. Skwncj synchronizacyjn dla wiadomości F/NAV i /NAV. Rodzaj wiadomości Liczba symboli Skwncja synchronizacyjna F/NAV /NAV
28 Waznymi lmnami w procsi formowania sygnałów w sysmi GALLO są: kodowani korkcyjn (FC forward rror corrcion) oraz przplo. Paramry kodowania sploowgo, kór będzi ralizowan w wszyskich kanałach prznoszących dan zbrano w abl. 8: Tabl. 8. Paramry kodowania sploowgo sosowango w sysmi GALLO. Paramr Warość Sprawność kodowania ½ Typ kodowania sploow Sała ograniczająca 7 Wilomiany gnrując [okalni] G1=171 o G2=133 o Skwncja kodująca G1, pom G2 Poniżj przdsawiono schma wykorzysywango kodra sploowgo (rys. 13). Rys. 13. Kodr sploowy w sysmi GALLO. Zakodowana srona podlga nasępni przploowi blokowmu. Dan zapisywan są w n kolumnach, zaś odczyywan w k wirszach, przy czym n i k zalżą od ypu wiadomości. Zsawini ych warości dla wiadomości F/NAV i /NAV pokazano w abl. 9. Tabl. 9. Paramry przplou w sysmi GALLO. Typ wiadomości Paramr F/NAV /NAV Rozmiar układu przplou (symbol) (n kolumn x k wirszy) 61 x 8 30 x 8 28
29 3.. Podsumowani W ninijszym rozdzial przdsawiono archikurę sysmu, jak i przwidywan do wdrożnia usługi. W dalszj części skupiono się na opisi przwarzania sygnałów w sysmi, z szczgólnym uwzględninim modulacji dla koljnych pasm, a akż sposobu gnracji ciągów rozpraszających. Już pobiżna analiza ych rozważań pozwala swirdzić, jak dużą złożonością charakryzują się opracj, co w sposób oczywisy przkłada się na wysoki wymagania dla odbiorników sygnałów GALLO. Podsawową innowacją w sosunku do GPS-u js wykorzysani dłuższych ciągów rozpraszających, a akż nowgo sygnału BOC, charakryzującgo się węższą niż BPSK funkcją auokorlacji, co skukuj większą prcyzją pozycjonowania, jdnak za cnę większgo skomplikowania procsu korlacji go sygnału w odbiorniku. Waro dodać, iż spcyfikacja sysmu [1], na kórj się opirano przy opracowaniu ninijszgo rozdziału js jdyni wrsją wsępną (draf), w związku z czym można się spodziwać pwnych modyfikacji w jj koljnych wrsjach. 29
30 4. Sysm GALLO w świl wymagań morskich Podsawowy szkil wymagań MO odnośni przyszłych usług radionawigacyjnych oparych na sysmach saliarnych worzą dwi rzolucj [17] i [8]. Pirwsza z nich okrśla formaln wymagania i procdury warunkując akcpację nowych sysmów jako składowych WWRNS (World-Wid Radionavigaion Sysm), podczas gdy druga przdsawia wymagania doycząc przyszłgo rozwoju GNSS. Jak już wspomniano w rozdzial 2, zarówno sysm GPS jak i GLONASS zosały uznan za składow WWRNS w roku Wymagania na odbiorniki sakow GPS i GLONASS były opracowan przz MO i nasępni wryfikowan równolgl z wymaganiami na odbiorniki dla różnicowgo GPS (dgps) i różnicowgo GLONASS (dglonass). nncją MO js równiż uznani dwóch usług GALLO, usługi owarj (OS) i usługi bzpiczńswa życia (SoL) jako składowych WWRNS. Przwiduj się, ż procdury uznawania ych usług będą podobn jak w przypadku GPS i GLONASS. Wymagania MO, odnosząc się do przyszłgo sysmu GNSS, doyczą równiż GALLO, kóry ma być uropjskim wkładm do go sysmu. Wymagania można podzilić na ogóln, opracyjn, insyucjonaln i wymagania okrsu przjściowgo [8]. Poniżj przyoczon zasały ważnijsz punky ych wymagań. a) Wymagania ogóln przyszłgo sysmu GNSS: Sysm powinin w pirwszym rzędzi spłniać wymagania opracyjn użykowników w zakrsi ogólnj nawigacji włączni z podchodznim do porów i żglugą po wodach ograniczonych. Sysm powinin służyć równiż do innych clów związanych z nawigacją i pozycjonowanim, kór mogą mić zasosowani. Sysm powinin mić zdolność (opracyjną i insyucjonalną) spłniania dodakowych wymagań, spcyficznych dla dango obszaru, przy wykorzysaniu lokalnych sysmów wspomagających. Powinna isnić możliwość wykorzysywania opracyjnych i insyucjonalnych możliwości sysmu przz niograniczoną liczbę użykowników na morzu, w powirzu i na lądzi. Sysm powinin charakryzować się nizawodnością i niskim koszm użykowania. Podczas podziału i odzyskiwania koszów powinno być sosowan zróżnicowani pomiędzy użykownikami morskimi, wykorzysującymi sysm dla clów związanych z bzpiczńswm żglugi i ymi, kórzy będą z nigo korzysać w clach komrcyjnych. b) Wymagania opracyjn przyszłgo sysmu GNSS: Sysm powinin spłniać wymagania opracyjn użykowników morskich w zakrsi ogólnj nawigacji włączni z podchodznim do porów i żglugą po wodach ograniczonych. [8] Sysm spłniać wymagania opracyjn użykowników morskich w zakrsi aplikacji związanych z pozycjonowanim. [8] Sysm powinin współpracować z sysmami godzyjnymi i sysmami rfrncyjnym kompaybilnymi z obcni działającymi sysmami nawigacji saliarnj. [8] Usługodawcy ni ponoszą odpowidzialności za paramry wyposażnia sakowgo, kór powinno spłniać sandardy przyję przz MO. 30
31 Zalcany js rozwój i sosowani zingrowanych odbiorników przysosowanych zarówno do przyszłgo sysmu GNSS jak i sysmów nazimnych. Wyposażni sakow przyszłgo sysmu GNSS powinno dosarczać użykownikowi informacji o pozycji, czasi, kursi i szybkości. Wyposażni sakow przyszłgo sysmu GNSS, włączni z wyminionym powyżj zingrowanym odbiornikim, powinno posiadać inrfjs ransmisji danych umożliwiający współpracę z innymi urządzniami sakowymi w clu dosarczania i/lub wykorzysywania informacji związanych z nawigacją i pozycjonowanim, akich jak: CDS, AS, GMDSS, moniorowanim ruchu saków ip. Wszyscy użykownicy powinni być w odpowidnim czasi informowani o dgradacji paramrów sygnałów poszczgólnych saliów i/lub całj usługi, poprzz dosarczani informacji o wiarygodności (ang. ingriy mssags). c) Wymagania insyucjonaln przyszłgo sysmu GNSS: Sysm powinin działać w ramach srukur insyucjonalnych i umów doyczących kirowania nim przz międzynarodową organizację cywilną, rprznującą w szczgólności współpracując rządy i użykowników. Międzynarodow organizacj cywiln powinny posiadać srukury insyucjonaln i umowy zzwalając na dosarczani usług, monioring i srowani sysmm i/lub usługami w ramach wczśnij przyjęych usalń doyczących minimalizacji koszów. Wymagania będą spłnion przy wykorzysaniu isnijącj (isnijących) organizacji lub poprzz usanowini nowj (nowych). Organizacja aka moż być sama prowajdrm i opraorm sysmu, albo moniorować i kirować dosarczycilm usługi. MO ni js w sani samodzilni być prowajdrm i opraorm GNSS; posiada jdnak możliwość ocniania i rozpoznawania nasępujących aspków GNSS: dosarczania usługi dla użykowników morskich bz ograniczń, ocny działania sysmu pod kąm spłniania wymagań użykowników morskich, sosowania międzynarodowo usalonych zasad podziału i odzyskiwania koszów, sosowania międzynarodowo usalonych zasad doyczących odpowidzialności. d) Wymagania okrsu przjściowgo Sysm powinin być rozwijany równolgl z isnijącymi sysmami nawigacji saliarnj, moż ż w części lub w całości wywodzić się z akigo sysmu. Rgionalny sysm nawigacji saliarnj, kóry js w płni sprawny, moż być uznawany za komponn sysmu WWRNS. Odbiorniki sakow lub inn urządznia dla przyszłgo GNSS powinny, jżli o możliw, być kompaybiln z podobnymi urządzniami pracującymi w ramach obcni działających sysmów nawigacji saliarnj. W ramach podkomiu MO do spraw bzpiczńswa żglugi (NAV) przprowadzono analizę warości podsawowych paramrów usługowych GALLO pod kąm spcyficznych wymagań morskich dla sysmu GNSS [18] Do paramrów ych nalżą: 31
32 dokładność okrślania pozycji (accuracy), wiarygodność (ingriy), ciągłość funkcjonowania (coninuiy), i dosępność (availabiliy). Paramr dokładność dfiniowany js jako sopiń zgodności pomiędzy oszacowaną lub zmirzoną pozycją i rzczywisą pozycją użykownika przy danym poziomi ufności, w dowolnym momnci czasowym. Js on okrślany jako błąd pozycji przy 9 % poziomi ufności. Wiarygodność sysmu (ingriy), j. zdolność dosarczania do użykowników osrzżń o niwłaściwym jgo funkcjonowaniu, js jdnym z ważnijszych paramrów z punku widznia zasosowań morskich. Wymagania doycząc wiarygodności objmują: warość progową błędu okrślania pozycji, kórj przkroczni skukuj wysłanim alarmu do użykownika ( próg alarmu ; ang. alr limi) oraz warość czasu, po kórj wysąpi alarm ( opóźnini alarmu ; ang. im o alarm). Ryzyko wiarygodności (ingriy risk) js o warość prawdopodobińswa, ż w okrślonym okrsi działania sysmu, błąd oblicznia pozycji przkroczy maksymalną dopuszczalną warość ( próg alarmu ) i ż użykownik ni zosani poinformowany o ym zdarzniu w ciągu zdfiniowango przdziału czasu ( opóźnini alarmu ). Paramr ciągłość (coninuiy) okrśla zdolność sysmu do zapwninia żądanj usługi, w sposób niprzrwany, w ciągu zdfiniowango odcinka czasu. Odpowiada on ryzyku uray dokładności albo wiarygodności w sysmi GALLO. Poniważ mogą wysąpić przypadki, ż przkroczon zasaną wymagania na wiarygodność, a mimo o sysm będzi mógł dalj okrślać pozycję w ramach spcyficznych wymagań doyczących dokładności, isniją dwa składniki ryzyka uray ciągłości. Pirwszy z nich wynika z przkrocznia okrślonych granic błędu ( progu alarmu ) dla danj opracji. Granic w sysmi GALLO wynoszą 12 m w poziomi i 2 m w pioni. Wymagania morski są łagodnijsz i okrślają próg alarmu w poziomi jako 2 m, ni mają ż swojgo odpowidnika w pioni. Składnik drugi doyczy zakłócnia funkcji nawigacyjnych spowodowango nisprawnością sysmu lub złą widocznością saliów w mijscu lokalizacji użykownika. Pojęci dosępność odnosi się do prawdopodobińswa, ż funkcj związan z okrślanim pozycji i moniorowanim wiarygodności są osiągaln i zapwniają wymaganą dokładność, wiarygodność i ciągłość. Paramr n, w odnisiniu do funkcji pozycjonowania, powinin wynosić, co najmnij 99,8 % w przdzial czasu 3 godzin, co js zgodn z wymaganiami MO. Tabl. 10 zawira zsawini minimalnych wymagań użykowników morskich (wg. MO), w abl. 11 przdsawiono naomias charakrysyki jakościow usługi SoL GALLO. Wymagania MO doycząc dokładności okrślania pozycji, podobni jak GALLO, dfiniują błąd pomiaru pozycji przy 9 % poziomi ufności, co umożliwia bzpośrdni porównywani warości go paramru. Porównywani nikórych innych paramrów było rudn i wymagało przprowadznia bardzij szczgółowj analizy, oparj czasami na symulacji kompurowj. Dokumny MO powirdzają jdnak, ż usługa GALLO SoL, opara na odbiorz dwuczęsoliwościowym powinna spłniać wszyski wymagania MO doycząc nawigacji ocanicznj, przybrzżnj, podczas podchodznia do porów oraz żglugi po akwnach zamknięych [18]. Wymagając najwyższj prcyzji opracj, aki jak 32
33 manwrowani w porach i bzpiczn cumowani, będą wymagały wspomagania przz sgmn lokalny. Tabl. 10. Minimaln wymagania użykowników morskich dla nawigacji ogólnj. Paramry sysmow Paramry usługow Paramr Dokładność pozycjonowania Ocany Wody przybrzżn Środowisko Podjścia do porów i akwny zamknię Pory H: 10 m H: 1 m Próg alarmu 2 m 2, m Opóźnini alarmu Ryzyko wiarygodności 10 s 10 - / 3 h Dosępność 99,8 % Ciągłość Ni wymagana 99,97 % Pokryci Globaln Globaln Rgionaln Lokaln Typ odbiornika Wiarygodność Tabl. 11. Charakrysyki jakościow usługi SoL GALLO. Częsoliwości nośn Obliczani wiarygodności Korkcja jonosfryczna Podwójn lub porójn Tak, w oparciu o globalną usługę wiarygodności (ingriy) GALLO Opara na pomiarach dwu-częsoliwościowych Warunki kryyczn Warunki ni kryyczn Dokładność (9%) H: 4 m, V: 8 m H: 220 m Próg alarmu H: 12 m, V: 20m H: 6 m Opóźnini alarmu 6 skund 10 skund Ryzyko wiarygodności 3,x10-7 / 10 s 10-7 / godz. Ciągłość 10- / 1 s 10-4 /godz / godz. Osiągalność wiarygodności 99, % Osiągalność dokładności 99,8 % 33
34 Prac doycząc zgodności GALLO z wymaganiami MO są konynuowan przz ksprów z podkomiu NAV. Z szczgółowych zagadniń wymagających dalszych badań symulacyjnych można wyminić: działani GALLO w przypadku dosępności ylko jdnj częsoliwości nośnj, działani GALLO w połączniu z isnijącym sysmm GPS przy użyciu nizalżngo mchanizmu monioringu wiarygodności RAM (Rcivr Auonomous ngriy Monioring). Z wprowadznim sysmu GALLO będzi związan równiż wspomagani obcni działającgo międzynarodowgo sysmu saliarngo COSPAS-SARSAT, w clu poprawinia jgo paramrów opracyjnych. Dokładność okrślania pozycji radiopław alarmowych PRB (mrgncy Posiion ndicaing Radio Bacon) przz obcny podsysm LOSAR sysmu COSPAS-SARSAT js niwilka, a równiż alarmowani ni zawsz odbywa się w czasi rzczywisym. Podsysm GOSAR sysmu COSPAS-SARSAT js obcni wspomagany przz sysm GPS. Zakłada się, ż wprowadzni nowgo srwisu SAR/GALLO przynisi nasępując korzyści [19]: poprawini dokładności okrślania pozycji radiopławy alarmowj PRB, wyposażonj w odbiornik GALLO, do kilku mrów (obcn wymagania wynoszą km); prawi naychmiasowy odbiór alarmowania o nibzpiczńswi (śrdni czas odbioru alarmu wynosi obcni w podsysmi LOSAR ok. 1 godziny); wykrywani sygnału alarmowgo przz więcj niż jdngo salię w clu uniknięcia mijscowgo blokowania usługi, w ciężkich warunkach; poprawę dosępności sgmnu kosmiczngo przz dodani 27 saliów MO, (obcni COSPAS-SARSAT wykorzysuj 4 saliy LO i 3 saliy GO). Wprowadzon zosani równiż łącz zwron pomiędzy opraorm SAR i radiopławą miującą sygnał o nibzpiczńswi. Umożliwi o wykorzysani nowych funkcji uławiających prowadzni akcji raowniczj oraz wspomagających idnyfikację i liminację fałszywych alarmów. Usługa SAR/GALLO zosała schmayczni przdsawiona na rys. 14. Rys. 14. Srwis SAR/GALLO. 34
35 Transpondr SAR na salici GALLO wykrywa sygnał alarmowy wysyłany przz radiopławę COSPAS-SARSAT, miowany w paśmi 406,0 406,1 MHz, a nasępni przkazuj go w paśmi L6, do ddykowanych sacji nazimnych (MOLUT). Przwiduj się, ż pięć sacji MOLUT, równomirni rozmiszczonych na kuli zimskij, zapwni j usłudz możliwość działania w skali globalnj. Paramry usługow srwisu SAR/GALLO zsawion zosały w abl. 12. Pojmność Opóźnini sysmu Tabl. 12. Paramry srwisu SAR/GALLO. Każdy salia powinin mić możliwość przkazywania sygnałów od maksymalni 10 radiopław Komunikacja pomiędzy radiopławą i sacją nazimną SAR powinna umożliwiać wykryci i lokalizację ransmisji w nibzpiczńswi w czasi krószym niż 10 minu Biowa sopa błędów < 10 - dla ransmisji pomiędzy Jakość usługi radiopławą i sacją nazimną SAR Szybkość danych 6 wiadomości (100-biowych) na minuę powirdznia Dosępność > 99,8 % 3
36 . Wymagania morski na odbiornik GALLO Podkomi Bzpiczńswa na Morzu (NAV) Międzynarodowj Organizacji Morskij (MO) zaakcpował porzbę opracowani wymagań ksploaacyjnych na odbiornik Galilo, jszcz zanim usługi go sysmu zosaną udosępnion. Ma o na clu uorowani drogi sysmowi GALLO do rakowania go przz MO jako składnika świaowgo sysmu radionawigacyjngo WWRNS (World Wid Radio Navigaion Sysm). Podkomi NAV uworzył Grupę Korspondncyjną zajmującą się ym zagadninim, kórj powirzył nasępując zadania: przgląd wsępnych projków wymagań ksploaacyjnych na odbiornik GALLO dla usługi owarj (OS) i usługi bzpiczńswa życia (SoL); rozparzni planów zakwalifikowania sysmu GALLO jako składnika WWRNS. W skład Grupy Korspondncyjnj wchodzą dlgaci z Chin, Francji, Nimic, Włoch, Liwy, Norwgii, Polski, Hiszpanii i Sanów Zjdnoczonych oraz rprznanci Komisji uropjskij (U) i Międzynarodowj Fdracji Pracowników Transporu (TF-CFTU). Wsępn projky zalcń okrślających minimaln wymagania ksploaacyjn na sakowy odbiornik GALLO dla usługi OS i dla usługi SoL [20, 21] podlgały opiniowaniu w clu zbrania propozycji zmian oraz komnarzy. Na osanim (2-gim) posidzniu podkomiu NAV, kór odbyło się w lipcu 2006 r., zosał zawirdzony projk rzolucji o przyjęciu wymagań ksploaacyjnych na wyposażni sakowgo odbiornika GALLO. Posanowiono uznać prac nad ą pozycją programu podkomiu NAV zakończon Podkomi zwraca uwagę, ż wymagania doyczą auonomiczngo odbiornika GALLO i ż w przyszłości moż zaisnić porzba opracowania wymagań ksploaacyjnych na wspólny odbiornik GALLO/GNSS (GALLO/GPS i/lub GLONASS). Akualna wrsja wymagań zosała opublikowana w Anksi 8 do raporu z 2-go posidznia podkomiu NAV [22]..1. Wyposażni sakowgo odbiornika GALLO Okrślni wyposażni odbiornika GALLO objmuj wszyski części i zspoły nizbędn dla sysmu przysosowango do ralizacji jgo funkcji. Minimalny zsaw wyposażnia odbiornika powinna objmować (jako minimum): annę umożliwiającą odbiór sygnałów GALLO; odbiornik GALLO wraz z procsorm przwarzającym odbran dan; środki dosępu do wyliczonych danych doyczących pozycji (szrokość i długość gograficzna); srowniki i inrfjsy; wyświlacz obrazujący pozycję i, jżli js o wymagan, inn formy przdsawiania danych wyjściowych. Projk anny powinin uwzględniać aką jj lokalizację na saku, kóra zapwnia bzpośrdni konak wizualny z konslacją saliów i uwzględni wnualn przszkody, kór mogą wysępować na saku. 36
37 .2. Wymagania ksploaacyjn dla odbiornika GALLO Wyposażni odbiornika GALLO, przznaczon do sosowania w clach nawigacyjnych na sakach ni przkraczających prędkości 70 węzłów, powinno spłniać, w uzupłniniu wymagań ogólnych okrślonych w posanowiniu [4], przdsawion poniżj minimaln wymagania ksploaacyjn. Zawirają on wymagania doycząc usalania pozycji, okrślnia kursu względm zimi (COG Cours Ovr Ground), prędkości względm zimi (SOG Spd Ovr Ground) oraz paramrów czasowych, zarówno dla clów nawigacyjnych jak i jako dan wjściow dla innych sysmów. Wymagania ni objmują dodakowych możliwości obliczniowych, kór moż posiadać wyposażni, ani paramrów innych sysmów, kór mogą pobirać dan wjściow od odbiornika GALLO. Odbiornik GALLO powinin ralizować wyszczgólnion poniżj funkcj. 1. Umożliwiać odbiór i przwarzani sygnałów GALLO doyczących pozycji i prędkości saku oraz sygnałów czasu przkazywanych na: pojdynczj częsoliwości L1, w przypadku odbiornika jdno-częsoliwościowgo. Odbiornik powinin wykorzysywać prosy jonosfryczny modl rozgłaszania dla wyworznia sygnału korkcji jonosfrycznj; częsoliwościach L1 i b lub częsoliwościach L1 i a, w przypadku odbiornika dwu-częsoliwościowgo. Odbiornik powinin sosować dwu-częsoliwościow przwarzani dla wyworznia sygnału korkcji jonosfrycznj. 2. Dosarczać informacji o szrokości i długości gograficznj wyrażonych w sopniach, minuach i ysięcznych częściach minuy. 3. Dosarczać warości czasu w odnisiniu do UTC (Univrsal Tim Co-ordinad). 4. Zapwniać co najmnij dwa wyjścia do innych urządzń, dla informacji o pozycji, czasi UTC, kursi COG, prędkości SOG i o alarmach. Wyjści dla informacji o pozycji powinno wykorzysywać odnisini WGS84 i powinno być zgodn z sandardami międzynarodowymi. 1 Sygnały wyjściow UTC, COG, SOG i alarmy powinny być zgodn z wymaganiami zawarymi w punkach 16 i 18.. Posiadać aką dokładność sayczną, kóra pozwoli na okrślni pozycji anny w ramach: 1 m w poziomi (9%) i 3 m w pioni (9%), dla pracy z pojdynczą częsoliwością L1; 10 m w poziomi (9%) i 10 m w pioni (9%), dla pracy dwu-częsoliwościowj L1 i a lub L1 i b Posiadać dokładność dynamiczną równoważną saycznj, okrślonj powyżj w p., przy uwzględniniu sanów morza i ruchu saku. 3 1 Publikacja [23] 2 Wymagania na minimalną dokładność okrślon dla pracy dwu-częsoliwościowj opar są na wymaganiachmo zawarych w rzolucjach [8] i [17], dla nawigacji przy zbliżaniu się do porów, wchodzniu do porów i żglugi na wodach przybrzżnych. Sysm GALLO będzi umożliwiał lpszą dokładność (4 m w poziomi 9% i 8 m pionowo 9%). 3 Rzolucja [4], Publikacj C i C
38 7. Posiadać rozdzilczość okrślania pozycji równą lub lpszą od 0,001 minuy, zarówno dla szrokości, jak i długości gograficznj. 8. Posiadać dokładność pozwalającą na okrślni czasu w ramach 0 ns w sosunku do UTC. 9. Umożliwiać auomayczny wybór odpowidnich sygnałów ransmiowanych przz saliy w clu okrślnia pozycji saku, jgo prędkości oraz czasu, z wymaganą dokładnością i częsością uakualniania. 10. Umożliwiać namirzani sygnałów saliarnych przy poziomi wjściowym częsoliwości nośnj w zakrsi od 128 dbm do 118 dbm. Po namirzniu sygnału saliarngo, urządzni powinno konynuować pracę w sposób zadawalający przy spadku poziomu nośnj do 131 dbm. 11. Umożliwiać zadawalając działani w normalnych warunkach zakłócń okrślonych przz wymagania zawar w rzolucji [4]. 12. Umożliwiać namirzani pozycji, prędkości i czasu, z wymaganą dokładnością, w ciągu minu, w przypadku braku ważnych danych (almanac daa) zw. zimny sar. 13. Umożliwiać usalni pozycji, prędkości i czasu, z wymaganą dokładnością, w ciągu 1 minuy w przypadku isninia ważnych danych (almanac daa) zw. cipły sar ; 14. Umożliwiać ponown usalni pozycji, prędkości i czasu, z wymaganą dokładnością, w ciągu 1 minuy, w przypadku, jżli nasąpiło przrwani usługi na okrs czasu równy 60 skund lub krószy. 1. Gnrować i wysyłać do wyświlacza oraz do inrfjsu cyfrowgo 4 informacj o nowj pozycji, co najmnij raz na skundę, w przypadku konwncjonalnych jdnosk pływających i co najmnij raz na 0, skundy, w przypadku jdnosk bardzo szybkich. 16. Dosarczać dan wyjściow COG, SOG i UTC, wyposażon w znacznik wiarygodności zgodny z znacznikim przyporządkowanym danym o pozycji. Wymagania na dokładność dla COG i SOG ni powinny być niższ od odpowidnich sandardów dla okrślania kursu oraz dla wyposażnia do pomiaru odlgłości i szybkości (SDM) 6. Dokładność a powinna być urzymywana w różnych dynamiczni zminiających się warunkach, kórym moż być poddawany sak. 17. Udosępnić co najmnij jdn syk, normalni zamknięy, dla wskaźnika uszkodznia odbiornika GALLO. 18. Odbiornik GALLO powinin posiadać dwukirunkowy inrfjs dla uławinia ransfrowania sygnałów alarmowych do sysmów zwnęrznych i poprzz kóry alarm akusyczny moż być powirdzany przz zwnęrzn sysmy; inrfjs powinin być zgodny z odpowidnimi sandardami międzynarodowymi. 7 4 Zgodngo z srią [23]. Rzolucja [24] dla saków konwncjonalnych i rzolucja [2] dla saków bardzo szybkich. 6 Rzolucja [26]. 7 Publikacja [4]. 38
39 19. Umożliwiać przwarzani danych wjściowych różnicowgo GALLO (dgallo) zgodni z sandardami TU-R 8 i odpowidnim sandardm RTCM 9 oraz sygnalizować, ż sygnały dgallo są odbiran i czy są on wykorzysywan do okrślania pozycji saku..3. Sprawdzani wiarygodności, osrzżnia o nisprawności i wskaźniki sanu Wyposażni odbiornika sakowgo powinno równiż wskazywać przkroczni przz paramry sysmu GALLO granic narzuconych przz ogóln wymagania doycząc nawigacji na ocanach, wodach przybrzżnych, podjściach do porów, wodach ograniczonych i podczas faz podróży po śródlądowych orach wodnych, zgodni z rzolucją A.93(23) lub dodakim 2 do rzolucji A.91(22) i odpowidnio późnijszych poprawk. Odbiornik GALLO powinin, jako minimum: 1. Wysawiać w ciągu skund osrzżni, jżli nowa pozycja, opara na informacjach uzyskanych od konslacji GALLO, ni zosała wyliczona w ciągu 1 skundy, w przypadku konwncjonalnych jdnosk pływających i 0, skundy, w przypadku jdnosk bardzo szybkich. W akich warunkach, podczas przywracania normalnj pracy, powinny być ksponowan osani znan warości pozycji i czasu z wyraźnym wskazanim sanu braku nijdnoznaczności. 2. Sosować nizalżny od odbiornika monioring wiarygodności RAM (Rcivr Auonomous ngriy Monioring) w clu uzyskania poziomu wiarygodności odpowidnigo dla podjmowanych działań. 3. Wykorzysywać funkcj samosowania. W przypadku odbiorników przysosowanych do usługi bzpiczńswa życia (SoL). monioring wiarygodności i algorymy alarmowania powinny opirać się na wykorzysywaniu odpowidnigo połącznia wiadomości o wiarygodności w sysmi Galilo (Galilo ingriy) i monioringu RAM. Odbiornik powinin wysawiać w ciągu 10 skund (TTA Tim o Alarm) od począku zdarznia alarm, jżli js przkroczony limi alarmowania 2 m (HAL Horizonal Alr Limi), na przciąg czasu co najmnij 3 skund. Prawdopodobińswo wykrycia zdarznia powinno być większ od 99,999 % w ciągu okrsu 3 godzin (ingriy risk 10 - /3h)..4. Zabzpicznia Powinny być wprowadzon zabzpicznia, kór zapwnią, ż ni nasąpi rwał uszkodzni w rzulaci przypadkowgo zwarcia lub uziminia anny lub jakigokolwik z wjść lub wyjść odbiornika GALLO, przz okrs czasu ni dłuższy od minu. 8 Zalcni [27]. 9 RTCM lub
40 6. Koncpcj sprzęowj ralizacji odbiornika GALLO Bz wąpinia ralizacja sprzęowa odbiornika ak złożongo sysmu, jakim js sysm nawigacji saliarnj ni js zadanim ławym. Podsawowym zadanim sojącym przd projkanm js wybór sprzęu, kóry zapwni możliwi fkywną ralizację algorymów zdfiniowanych na api opracowywania koncpcji, a akż kóry będzi rlaywni ani oraz w razi porzby umożliwi późnijsz rozszrzni funkcjonalności goowgo urządznia (posula szczgólni isony, biorąc pod uwagę mpo z jakim rozwijają się współczsn sysmy i algorymy). Z pomocą przychodzi nam ogromny posęp jaki nasąpił w obszarz chniki półprzwodnikowj, a akż możliwość zasąpinia lmnów analogowych poprzz ralizując sam funkcj układy cyfrow. Na przsrzni la i wraz z rozwojm chnologicznym pojawiło się sporo rozwiązań wykorzysywanych w nawigacji saliarnj. W ninijszym rozdzial omówimy króko rzy najważnijsz, najszrzj rprznowan w prakyc, koncpcj ralizacji sprzęowych odbiornika sygnałów saliarnych, a konkrni: Rozwiązania wykorzysując układy ASC Rozwiązania wykorzysując układy FPGA Tchnika radia programowalngo SDR Rozwiązania wykorzysując układy ASC Układy ASC (Applicaion Spcific ngrad Circui), jak sama nazwa wskazują są układami scalonymi projkowanymi pod kąm ralizacji ściśl okrślongo zadania. ch podsawową zalą js przd wszyskim duża wydajność oraz zmnijszony pobór nrgii w sosunku do układów ogólngo przznacznia. Charakryzują się ym, ż jdn aki układ, moż zasąpić cały zsaw układów scalonych ogólngo przznacznia, dzięki czmu uzyskuj się szrg korzyści związanych z zmnijsznim zajmowanj powirzchni. Zasosowani pojdynczgo chipu obniża koszy projkowania, produkcji i monażu płyk drukowanych. Dodakowo układy ASC są szybsz, ańsz i bardzij nizawodn w porównaniu z konwncjonalnymi układami scalonymi. Z drugij srony czasochłonność zaprojkowania i wykonania lmnów ASC js rlaywni duża. Wraz z upływm czasu złożoność układów ASC wzrosła w ogromnym sopniu: liczba bramk logicznych sięga 100 milionów, a pojdyncz układy mogą zawirać 32-biow procsory, zaawansowan układy pamięciow, ip. Z punku widznia zasosowań chnologii układów ASC dla porzb nawigacji saliarnj (a konkrni opracowywania odbiornika nawigacyjnych sygnałów saliarnych) nalży swirdzić, iż js ona dominująca w go ypu zasosowaniach. W zasadzi większość isnijących odbiorników czy ż wchodzących w ich skład komponnów wykorzysuj układy ASC. Z go powodu można swirdzić, ż chnika ASC js najbardzij radycyjnym, klasycznym podjścim koncpcyjnym przy ralizacji odbiorników sygnałów saliarnych. Ogólny, koncpcyjny schma odbiornika nawigacyjngo, opargo na omawianj chnologii, można przdsawić, jak na rys
41 AGC Kanał n Wzmacniacz niskoszumny + filr Miszacz F (A) Przwornik A/D F (D) Kanał 2 Kanał 1 Odbiornik cyfrowy Oscylaor odnisinia Synzaor częsoliwości Część analogowa - hardwar (ASC) Część cyfrowa hardwar (ASC) nrfjs użykownika Sofwar Blok formowania sygnału nawigacyjngo Odzyskiwani danych nawigacyjnych Sofwar (mikroprocsor) Srowani śldznim saliów Rys. 1. Schma blokowy radycyjngo odbiornika GNSS, wykorzysującgo układy ASC [28]. Sygnał radiowy z anny js doprowadzany do niskoszumngo wzmacniacza wjściowgo, kóry oprócz wzmocninia sygnału, dokonuj równiż jgo wsępnj filracji i zabzpicza odbiornik przd uszkodzniami lkrycznymi. Wzmocniony sygnał rafia do układu miszacza, kórgo zadanim js przkszałcnia sygnału wysokij częsoliwości, docirającgo z anny, na sygnał o niższj częsoliwości pośrdnij (F), w clu uławinia jgo późnijszgo przwarzania. Do układu miszacza js doprowadzany równiż sygnał z synzaora częsoliwości srowango przz oscylaor lokalny gnrujący częsoliwość odnisinia. Analogowy sygnał pośrdnij częsoliwości F-A js zaminiany w przworniku A/D na sygnał cyfrowy F-D. Przwornik A/D powiązany js z układm miszacza pęlą auomaycznj rgulacji poziomu AGC. Układ ASC ralizujący odbiornik cyfrowy ralizuj funkcj przwarzania w paśmi podsawowym (ang. basband procssor). Przjmuj on próbki sygnału F-D, dokonuj szybkich opracji korlacji na kodzi (ranging cod) i gromadzi wyniki opracji przz okrs. Zgromadzon wyniki przsyłan są nasępni do mikroprocsora, kórgo zadanim js srowani pęlami śldznia saliów oraz dkodowani i przwarzani sruminia danych nawigacyjnych w clu okrślnia pozycji, prędkości i odchyłki czasu odbiornika w sosunku do czasu GPS. Już a pobiżna analiza działania układu z rys. 1. pozwala okrślić podsawową wadę go rozwiązania. Oparci działania znaczącj części odbiornika na lmnach ASC, kór z dfinicji są ściśl wyspcjalizowan do konkrngo zasosowania, isoni zmnijsza możliwości późnijszj rozbudowy układu. lasyczność proponowanj srukury js więc bardzo ograniczona, a jakikolwik zmiany wymagałyby ingrncji w srukurę sprzęową odbiornika, co z punku widznia użykownika js rozwiązanim szczgólni nidogodnym. Jak już wspominano, problm zapwninia lasyczności i adapowalności odbiorników js w dzisijszych czasach szczgólni isony. Obcn sysmy są modrnizowan coraz częścij i w coraz większym zakrsi, zaś fakyczn przysosowani urządznia do ych zmian ni zawsz wymaga modyfikacji hardwar u. W odnisiniu do odbiornika GALLO, przykładow modyfikacj, jaki zgodni z przwidywaniami będą koniczn o np. 41
42 implmnacja nowych algorymów modulacji czy pozycjonowania lub przysosowani sysmu do współdziałania z innymi sysmami (główni z GPS-m). snij sporo ralizacji układów wjściowych (fron-ndów) oraz procsorów nawigacyjnych w chnologii ASC. Kilka przykładów go ypu rozwiązań zbrano w poniższych ablach (abl. 13 i abl. 14). Tabl. 13. Przykładow układy fron-nd wykorzysując chnikę ASC. l.p. Producn Układ scalony (fron-nd) 1 ST Microlcronics STB610 2 ATML ATR0600, ATR ZarlinkSmiconducor GP2010, GP201 4 Nmrix NJ1006A u-nav Microlcronics un100, un8021c 6 Philips Smiconducors UAA170HL 7 MAXM MAX2742, MAX2744, MAX274 8 NFNON PMB3330 Tabl. 14. Przykładow procsory nawigacyjn wykorzysując chnikę ASC. l.p. Producn Układ scalony (bas-band) 1 ST Microlcronics STA201 2 ATML ATR0620, ATR Zarlink Smiconducor GP1020, GP2021, GP Nmrix NJ1020, NJ1030 u-nav Microlcronics un8031a, un8031b 6 Philips Smiconducors SAA17HL 7 SONY CXD NFNON PMB Rozwiązania wykorzysując układy FPGA Koljn z prznowanych rozwiązań sprzęowj ralizacji odbiornika GALLO sanowi pwin krok naprzód jśli chodzi o ofrowaną lasyczność. Układy FPGA (Fild Programmabl Ga Array) w ogólności spłniają sam funkcj co układy ASC, jdnak mogą on być przprogramowywan już po wyworzniu. Składają się z bloków logicznych, kór mogą być programowalni łączon z sobą dla porzb ralizacji okrślonych funkcji. Bloki logiczn najczęścij są zgrupowan w formi marycy, zaś ich liczba moż być zróżnicowana w zalżności od sopnia skomplikowania od kilkudzisięciu 42
43 do wilu ysięcy. Dodakowo pojdynczy blok logiczny moż być ak prosy, jak pojdynczy ranzysor, al ż równi złożony, jak mikroprocsor [29]. Najczęścij za jgo pośrdnicwm można zralizować szrg kombinacyjnych bądź skwncyjnych funkcji logicznych; przykładowo prosy blok logiczny moż być zbudowany z muliplksra, bramki logicznj i przrzunika, jak na rys. 16. Rys. 16. Przykładowa ralizacji bloku logiczngo wchodzącgo w skład marycy FPGA [29]. Naomias ogólną srukurę układu FPGA przdsawia rys Rys. 17. Ogólna srukura układu FPGA [29]. W porównaniu do klasycznych układów ASC, układy wykorzysując chnikę FPGA są z rguły są nico wolnijsz i charakryzując się większym poborm mocy. Z drugij jdnak srony zapwniają bardzo dobrą przpusowość (zbliżoną do układów ASC) i możliwość rkonfiguracji (przprogramowania). T dwi zaly w dużj mirz przsądziły o popularności go rozwiązania, akż w obszarz nawigacji saliarnj. 43
44 6.3. Tchnika radia programowalngo (SDR) Wykorzysani chnologii radia dfiniowango programowo SDR (ang. Sofwar Dfind Radio) sanowi koljny krok w rozwoju nowoczsnych odbiorników dla globalngo sysmu nawigacji saliarnj (GNSS). Tchnologia a, w przciwińswi do chnologii oparj na wyspcjalizowanych układach scalonych ASC, wykorzysuj programowaln mikroprocsory lub procsory sygnałow (DSP), zapwniając rozdzilni pomiędzy częścią analogową ralizowaną sprzęowo i cyfrowym przwarzanim sygnałów, wykonywanym programowo. Taki podjści do ralizacji odbiornika moż przyniść szrg korzyści w przypadku sysmu GNSS, kóry będzi w najbliższj przyszłości uzupłniany o now sygnały, a w szczgólności objmi równiż uropjski sysm nawigacji saliarnj GALLO. Akcpacja nowych sygnałów, w przypadku odbiorników oparych na chnologii ASC, będzi wymagała zmian w sprzęci, podczas gdy w odbiornikach oparych na chnologii SDR wysarczy akualizacja oprogramowania. Tchnologia radia programowalngo js opara na spcjalisycznym oprogramowaniu, współpracującym z uniwrsalną plaformą sprzęową. dalny odbiornik GNSS wykonany w chnologii radia programowalngo js urządznim uniwrsalnym, w kórym ralizowan sprzęowo funkcj będą sprowadzon do nizbędngo minimum. Podsawowym modułm odbiornika js procsor sygnałowy, współpracujący z szrokopasmowymi przwornikami analogowo-cyfrowymi A/C. Procsor sygnałowy powinin posiadać możliwość zdalnj wymiany oprogramowania, kór wyznaczy funkcj rminala ruchomgo, związan z jgo współdziałanim w danym sysmi i zapwni ralizację okrślonych usług. lmny wykorzysywan do opracji analogowych, aki jak anna, wzmacniacz i filry, muszą posiadać bardzo szroki pasmo i umożliwiać odbiór różngo rodzaju sygnałów przy wyjąkowo dużj rozpięości częsoliwości nośnych. W idalnym przypadku archikurę radia programowalngo można by przdsawić jak na rys. 18. D/A dalny cyrkulaor Anna nadawcza/ odbiorcza RF oupu Wysoko-fkywny liniowy wzmacniacz mocy DSP RF inpu A/D Rys. 18. dalizowana archikura radia programowalngo SDR [30]. 44
45 Ralizacja idalngo odbiornika SDR, składającgo się jdyni z anny, przwornika A/C i procsora sygnałowgo, pracującgo w bardzo szrokim paśmi częsoliwości napoyka jdnak ciągl na problmy, związan z implmnacją poszczgólnych jgo członów. Pirwszą napokaną barirą js wyworzni szybkich przworników A/C i C/A, zapwniających odpowidnią rozdzilczość przwarzania. Szacuj się, ż rozdzilczość a powinna być rzędu 16 biów, co zapwni dynamikę przwarzania na poziomi 100 db. Z rndów rozwojowych j gałęzi produkcji układów scalonych wynika, ż zwiększani częsoliwości próbkowania w konsruowanych przwornikach ni idzi w parz z wzrosm rozdzilczości. Z analizy paramrów lkrycznych przworników A/C (wynikającj z orii nioznaczoności Hisnbrg a) wynika, ż granicę chnologiczną sanowi wyprodukowani przwornika pracującgo z częsoliwością próbkowania 1 GHz i rozdzilczością 20 biów, co zapwnia dynamikę przwarzania na poziomi 120 db. Dalsz polpszni paramrów lkrycznych przworników moż być ralizowaln jdyni po znacznym obniżniu mpraury oocznia pracy przwornika (do pojdynczych sopni Klwina). Oczywiści spłnini go osanigo posulau rudno na dziń dzisijszy wyobrazić sobi w sprzęci prznośnym. Kłopoy chnologiczn z wyworznim przworników C/A dla porzb chnologii radia programowalngo są związan z zapwninim odpowidnio wysokij liniowości przwarzania, ingracji filru wyjściowgo w jdnym układzi scalonym oraz skucznj izolacji sygnałów akujących pracę przwornika od jgo wyjścia analogowgo w clu zminimalizowania zakłócń. Oddzilnym problmm js wyworzni szybkich procsorów sygnałowych, mogących sprosać wymaganj szybkości cyfrowj obróbki sygnałów w czasi rzczywisym. Jak wynika z licznych badań symulacyjnych, prowadzonych dla porzb sysmu UMTS (Univrsal Mobil Tlcommunicaions Sysms), wydajność obliczniowa procsorów sygnałowych do implmnacji rminali w chnologii radia programowalngo powinna sięgać dzisiąk miliardów insrukcji/s, przy zadowalającj dokładności obliczń. Na dziń dzisijszy ponaci w produkcji procsorów sygnałowych ofrują szybkość obliczniową swoich produków o przynajmnij jdn rząd mnijszą od wymaganj. Z analizy rynku układów scalonych wynika, ż na zwiększni wydajności obliczniowj procsorów sygnałowych o miliard insrukcji/s porzba około jdngo roku. Dodakowym urudninim w zapwniniu odpowidnich procsorów sygnałowych do przyszłych zasosowań w rminalach ruchomych, podobni jak o ma mijsc przy wywarzaniu przworników A/C js korlacja pomiędzy wzrosm szybkości przwarzania a poborm mocy, zn. im wyższa js wydajność obliczniowa procsora sygnałowgo, ym pobór mocy z źródła zasilania js większy, co js nikorzysn z punku widznia zasosowań w sprzęci prznośnym. Ralizacja prakyczna odbiornika SDR, przy zasosowaniu dzisijszj chnologii, js możliwa poprzz ograniczniu zakrsu odbiranych sygnałów i przwarzani ylko jdngo, lub kilku przylgających do sibi pasm częsoliwości lub naw wyłączni składowych widma sygnału radiowgo prznoszących większą część mocy sygnału. Rozwiązani aki pozwala o na zrdukowani wymagango nakładu przwarzania do warości umożliwiającj całkowici programow przwarzani sygnałów. Ponado, przy projkowaniu odbiorników GNSS js sosowana chnika prznosznia widma odbirango sygnału do niższgo zakrsu częsoliwości poprzz zasosowani konwrrów obniżających częsoliwość (miszaczy). Moż o być ralizowan wilosopniowo lub za pomocą pojdynczgo konwrra programowalngo [31]. 4
46 Obcni, podobni jak w przypadku chniki ASC, przdsawimy schmayczn ujęci odbiornika sygnałów nawigacyjnych z wykorzysanim chniki radia programowalngo (rys. 19). AGC Kanał n Wzmacniacz niskoszumny + filr Miszacz F (A) Przwornik A/D F (D) Kanał 2 Kanał 1 Mikroprocsor/DSP Odbiornik cyfrowy Oscylaor odnisinia Synzaor częsoliwości Część analogowa - hardwar (ASC) Mikroprocsor / DSP / DSP+FPGA (Sofwar) nrfjs użykownika Blok formowania sygnału nawigacyjngo Odzyskiwani danych nawigacyjnych Srowani śldznim saliów Sofwar Rys. 19. Schma koncpcyjny odbiornika GNSS opargo na chnologii radia programowalngo SDR [28]. Jak widać, część analogowa odbiornika ma idnyczną srukurę, jak w przypadku zasosowania klasycznj archikury ASC, naomias pozosał funkcj, j. korlacja sygnałów w kanałach oraz część nawigacyjna, są ralizowan przz wyspcjalizowany mikroprocsor, bądź ż co js obcni bardzo częsą prakyką: połączni marycy FPGA z mikroprocsorm, z uwagi na fak, iż przy ralizacji szczgólni wymagających algorymów właśni układy FPGA charakryzują się większą wydajnością. Korzyści z wykorzysania chnologii radia programowalngo są bardzo liczn. Oprócz wyminionj już znakomij lasyczności, kóra umożliwia ław przysosowywani urządzń do nowych wymagań czy sandardów, nalży wyminić przd wszyskim przsłanki konomiczn. Kosz wywarzania oprogramowania js wyraźni niższy, niż produkcja hardwar u; dodakowo dużo mnijsz są wymagania odnośni liczności zspołu, jak i jgo wyposażnia (w prakyc do worznia sofwar u porzbny js wyłączni kompur i środowisko programisyczn). SDR js dobrą plaformą do worznia urządzń pracujących w wilu rybach (muli-mod), np. łącząc w sobi funkcj lfonu komórkowgo oraz odbiornika GALLO, ip. Rzcz jasna, a wilorybowość byłaby ralizowana na poziomi sofwar u, ni zaś sprzęu. Ponado z uwagi na dużą lasyczność, SDR moż być wykorzysywany jako baza do opracowywania plaform sowych (s-bd plaforms) dla nowo wdrażanych urządzń czy sysmów [28]. 46
47 7. Koncpcja budowy odbiornika GALLO W ninijszym rozdzial przdsawiona zosani koncpcja budowy odbiornika GALLO. Mówiąc ściślj, będzi o koncpcja odbiornika dwusysmowgo (GALO+GPS), pracującgo w pasmi L1 (odbiór sygnałów GPS C/A oraz GALLO BOC(1,1)), sąd można w ym wypadku użyć sformułowania odbiornik GNSS. W pirwszj części skupimy się na schmaci funkcjonalnym akigo urządznia, naomias w dalszj części przjdzimy do opisu koncpcji ralizacji odbiornika Archikura i działani odbiornika GNSS W najprosszym ujęciu schma blokowy odbiornika dwusysmowgo GNSS można przdsawić jak na rys. 20. Rys. 20. Podsawowy schma blokowy odbiornika GNSS [na pods. 32, 33, 34]. Odbrany przz annę sygnał radiowy js w pirwszym api przwarzany w bloku nazywanym częso fron-ndm. Podsawow funkcj go członu objmują filrowani, odpowidni wzmocnini sygnału i konwrsję w dół na osi częsoliwości, a akż konwrsję analogowo-cyfrową. Filrowani js nizbędn z uwagi na obcność w przwarzanym sygnal inrfrncji poza-pasmowych (ou-of-band inrfrncs) i js częso ralizowan za pomocą filrów ypu SAW (surfac acousic wav). Konwrsja w dół przwarzango sygnału js najczęścij ralizowana jako procs dwu- lub jdnoapowy. W pirwszym przypadku są wykorzysywan dwi częsoliwości pośrdni, z kórych osania js bliska pasmu podsawowmu; rozwiązani o zapwnia poprawn łumini składowj lusrzanj. W przypadku konwrsji jdnoapowj częsoliwość pośrdnia js z rguły większa (rzędu kilkudzisięciu MHz). Osanim apm js przworzni sygnału do posaci cyfrowj, kóra js wykorzysywana w dalszych blokach funkcjonalnych odbiornika. W procsi akwizycji odbiornik wyszukuj sygnały od saliów będących w zasięgu jgo widzialności. Dodakowo ma mijsc zgrubn oszacowani przsunięcia dopplrowskigo częsoliwości nośnj (dopplr shif) oraz przsunięci fazy odbrango ciągu kodowgo (cod phas shif). Jak wiadomo w procsi odbiorczym są gnrowan zarówno lokaln rpliki ciągów kodowych jak i częsoliwości nośnj, dlago dla zapwninia możliwi największj jakości koniczn js, aby zarówno nośna, jak i ciągi kodow były dokładni 47
48 zsynchronizowan z ciągami i nośną zawarą w sygnal odbranym. Za zapwnini j zgodności odpowiadają dwi pęl śldząc: zw. pęla śldząca kod (cod racking loop) oraz pęla śldząca nośną (carrir racking loop). O sposobach ich ralizacji będzi mowa w dalszj części ninijszgo rozdziału. Akwizycja moż być ralizowana na kilka sposobów. Pirwszy z nich, najbardzij oczywisy zakłada korlację sygnału odbrango z wszyskimi możliwymi ciągami kodowymi (uwzględniając przsunięcia) po wszyskich możliwych częsoliwościach, aż do osiągnięcia zakładanj warości progowj na wyjściu korlaora. Każda para ciąg-częsoliwość worzy swoisą komórkę, kóra musi być przworzona podczas akwizycji i kóra okrśla rozdzilczość procsu. Opisana moda (zwana algorymm przszukiwania szrgowgo srial sarch acquisiion) js rlaywni prosa w implmnacji sprzęowj (przykładowo: sam korlaory są wykorzysywan i do akwizycji, i do procsu śldznia), jdnak swarza ogromn wymagania odnośni wydajności obliczniowj. Dla ciągu kodowgo o długości chipów i założongo maksymalngo przsunięcia dopplrowskigo wynoszącgo +/- khz przsrzń częsoliwościowo-kodowa, kóra musiałaby być przworzona w akwizycji osiągnęłaby wymiar ponad komórk (przy założniu, ż jdna komórka objmuj 0, chipa/00hz) [3]. W związku z przdsawioną powyżj nidogodnością szrgowj mody akwizycji, korzysnijsz js zasosowani inngo algorymu, zwango przszukiwanim równolgłym (paralll cod phas sarch acquisiion), kóry rdukuj żmudn przszukiwani w dwóch wymiarach do procsu jdnowymiarowgo objmującgo jdyni przsrzń częsoliwości nośnych. Schma blokowy opisujący ę modę przdsawiono poniżj (rys. 21). Z przwornika A/D FFT FFT ^2 Q Zspolon sprzężni Oscylaor FFT Gnraor PRN Rys. 21. Akwizycja modą przszukiwania równolgłgo. Na rys. 22. przdsawiono przykładowy wynik akwizycji przy pomocy algorymu równolgłgo. Rys. a) obrazuj syuację, gdy żadn z saliów ni js widoczny dla odbiornika, naomias rys. b) gdy jdn z saliów js widoczny (pik wyraźni przwyższający pozosał próbki). Na podsawi rys. b) można akż zgrubni okrślić warość przsunięcia ciągu kodowgo (fazę kodu) oraz częsoliwość nośną. 48
49 moduł moduł faza ciągu a) częsoliwość kodowgo b) częsoliwość faza ciągu kodowgo Rys. 22. Wyniki procsu akwizycji (moda przszukiwania równolgłgo). a) brak saliów w obszarz widoczności odbiornika, b) widoczny jdn z saliów. Js oczywis, ż opisana moda zapwnia ogromną rdukcję przszukiwanych kombinacji, jdnakż z drugij srony każd z przszukiwań charakryzuj się dużą złożonością obliczniową, o wil większą, niż przy pojdynczym przszukaniu moda klasyczna. Js o związan z wykorzysywanim algorymów prosj i odwronj ransformay Fourira i właśni od szybkości algorymu ralizującgo obliczani ransforma Fourira zalży fkywność opisywanj mody. W dalszj koljności scharakryzowan zosaną pęl śldząc nośną oraz ciąg kodowy. Po konwrsji analogowo-cyfrowj orzymany srumiń zosaj przmnożony przz lokalni wygnrowaną składową kwadraurową i synfazową częsoliwości nośnj w clu uworznia dwóch kanałów oraz Q. Wymagan js, aby wygnrowana lokalni nośna wolna była od składowj dopplrowskij powsającj w wyniku przmiszczania się odbiornika. Za prmannną konrolę i srowani gnraorm nośnj odpowiada pęla śldznia nośnj, ralizowana najczęścij w prakyc jako pęla fazowa PLL (Phas Lockd Loop). Uproszczony schma akij pęli (ściślj mówiąc js o zw. pęla Cosasa) przdsawiono na rys. 23. Kod PRN FDP Z przwornika A/D NCO gn. nośnj Filr pęli Dyskryminaor pęli 90 O Q FDP Rys. 23. Pęla śldznia nośnj [36]. 49
50 Podsawow komponny składając się na pęlę o: Dyskryminaor pęli śldzącj nośną, Filr pęli, Srowany numryczni oscylaor (NCO Numrically Conrolld Oscillaor). Z uwagi na dużą dokładność oraz niwrażliwość na zmiany fazy nośnj o 180º, dyskryminaor posanowiono wykonać jako układ ralizujący funkcję arcus angns (arcangn discriminaor), a zam jgo wyjści opisuj zalżność (parz akż rys. 24): k Q ϕ = arcan k, (9) gdzi: Q k i k i o sygnały z gałęzi i Q (składowa synfazowa i kwadraurowa), k o numr saliy. Rys. 24. Wyjaśnini znacznia paramru ϕ. Filr pęli śldzącj nośną js nizbędny z dwóch powodów: w wyniku działania pęli powsaj dodakowy szum (naw przy dużych warościach SNR), kóry nalży ograniczyć, a akż dla przciwdziałania poncjalnmu wzbudzaniu się pęli. Srowany numryczni oscylaor odpowiada za gnrację wolnj od błędu częsoliwości nośnj. Pęla śldząca fazę kodu odpowiada za gnrację w odbiorniku lokalnych rplik ciągów rozpraszających, kórych faza js zgodna z fazą ciągu zawargo w odbranym sygnal saliarnym. Dzięki mu dysponujmy sygnałm o możliwi największj mocy, a akż w oparciu o przsunięci fazy ciągu rozpraszającgo możmy okrślić zw. TOT (Tim of Transmission), czyli czas ransmisji sygnału, wykorzysywany do wyznaczania psudoodlgłości (psudo-rang) między odbiornikim a konkrnym salią. Układ śldzący kod najczęścij wykonywany js jako pęla DLL (Dlay Lockd Loop). W przypadku odbiorników GPS układ pęli śldzących ciąg kodowy był ralizowany z wykorzysanim zw. mody arly-la, kóra polgała na korlowaniu sygnału odbrango z rzma wrsjami wygnrowango lokalni ciągu rozpraszającgo: biżącą (Promp), opóźnioną o pół chipa (La) i przsunięą do przodu o pół chipa (arly), co umożliwiało dokładną lokalizację maksimum funkcji korlacji. Jak się okazuj w przypadku odbiornika 0
51 GALLO, przwarzającgo sygnał BOC(1,1) aki podjści moż być niwysarczając. Wynika o z posaci funkcji auokorlacji sygnału BOC(1,1), kóra charakryzuj się dodakowymi ujmnymi pikami, kór na wyjściu dyskryminaora mogą być błędni inrprowan jako maksima funkcji auokorlacji. Dlago ż nizbędn js wykorzysani w ym przypadku dwóch dodakowych korlaorów zwanych vry-arly i vry-la, kór będą wykorzysywan do wykrywania ych dodakowych bocznych mimimów i biżącgo korygowania w przypadku zaisninia błędów w pęli. Funkcj auokorlacji dla sygnałów BPSK(1) (GPS) oraz BOC(1,1) (GALLO) przdsawiono poniżj na rys. 2. Zaznaczono równiż warości arly (), Promp (P), La (L), Vry-arly (V), Vry-La (VL). a) b) Rys. 2. Funkcj auokorlacji sygnału a) BPSK(1) i b) BOC(1,1) [na pods. 37, 38]. Srukura pęli śldzącj z wykorzysanim korlaorów Vry-arly i Vry-La zosała przdsawiona na rys. 26. V C ałko w an i akum ulacja C a łko w a ni akum ulacja P C a łko w a ni akum ulacja Dyskrym inaor Filr pęli O scy laor V L L C a łko w a ni akum ulacja C a łko w a ni akum ulacja D kcja błę dngo piku 90 O G nraor kodu PRN N C O Q Przw arzani analo giczn (jak d la ) Rys. 26. Pęla śldznia ciągu kodowgo z wykorzysanim pięciu korlaorów [39]. 1
52 Za wyjąkim obcności dwóch dodakowych korlaorów (Vry arly, Vry La) nizbędnych do odbioru sygnału GALLO podsawowa srukura pęli pozosaj nizminna. Umożliwia o worzni układu obsługującgo obydwa sysmy, w kórym w przypadku odbioru sygnału GPS wykorzysan będą korlaory, P, L, zaś w przypadku GALLO dodakowo V i VL, zaś przłączani między obydwoma rybami odbywa się w sposób płynny, bz ingrncji użykownika. Wykorzysany dyskryminaor pracuj jako zw. normalizowany dyskryminaor arly-minusla-powr i jgo wyjści opisuj nasępująca zalżność: D = ( + Q ) ( L + QL ) ( + Q ) + ( L + QL ), (10) gdzi:, Q oznaczają wyjścia korlaora arly w gałęzi oraz Q, odpowidnio, zaś L, Q L oznaczają wyjścia korlaora La w gałęzi oraz Q, odpowidnio. W prakycznych ralizacjach odbiornika GNSS obi pęl pracują w sposób łączny będąc po części wzajmni zalżnymi od sibi. Ni wpływa o na uproszczni srukury odbiornika, al js dogodn z uwagi na rdukcję wymagań obliczniowych, co wynika z dublowania pwnych funkcji przz obi pęl. Rys. 27 przdsawia osaczny schma układu śldzącgo dwusysmowgo odbiornika GALLO+GPS. V Całkowani akumulacja Całkowani akumulacja P Całkowani akumulacja L Całkowani akumulacja Oscylaor VL Całkowani akumulacja Dkcja błędngo piku Gnraor kodu PRN NCO Dyskr. pęli kodowj DLL V Całkowani akumulacja 90 O Całkowani akumulacja Dkcja błędngo piku Q P Całkowani akumulacja L Całkowani akumulacja VL Całkowani akumulacja NCO gn. nośnj Filr pęli Dyskryminaor pęli nośnj Rys. 27. Pęl śldząc w odbiorniku GNSS. PLL 2
53 Sygnał cyfrowy po usunięciu ciągu rozpraszającgo js podawany do dalszych bloków odbiornika (procsor nawigacyjny), gdzi ma mijsc dkodowani wiadomości nawigacyjnj i, akż w oparciu o znan warości psudoodlgłości, osaczn wyznaczni pożądanych informacji: pozycji/czasu/prędkości Koncpcja ralizacji sprzęowj odbiornika Na api opracowywania koncpcji hardwar owj odbiornika GALLO+GPS jdnym z podsawowych kryriów było zapwnini możliwi dużj lasyczności proponowango rozwiązania. Z uwagi na fak, iż odbiornik ma być przznaczony do pracy na morzu, rozmiar urządznia ni js w ym wypadku kryyczny; opymalizacja powinna zmirzać naomias w kirunku możliwości implmnacji nowych usług. Sworzni archikury możliwi bliskij prznowanj w wczśnijszym podrozdzial koncpcji radia programowalngo SDR wydaj się być opymalnym rozwiązanim, pozwalającym na rlaywni szybką i ławą rkonfigurację i przysosowani odbiornika do nowych funkcji. W czasach, gdy sandardy sysmów, jak i oczkiwania użykowników zminiają się bardzo szybko maksymalna uniwrsalność odbiornika sanowiłaby jgo nizaprzczalną zalę. Koncpcję sprzęowj ralizacji prznowango odbiornika przdsawiono na rys. 28. Fron-nd (GP201) PC (konfiguracja procsora nawigacyjngo) FPGA (układ korlaorów) Procsor nawigacyjny (MCF373L) Urządzni końcow (inrfjs użykownika) Rys. 28. Koncpcja ralizacji sprzęowj odbiornika. Jak już wspominano, fron-nd odpowiada za wsępną obróbkę analogowgo sygnału, j. filrowani, wzmocnini, konwrsję w dół i konwrsję analogowo-cyfrową. Posanowiono wykorzysać w ym clu jdn z goowych modułów, GP201 firmy Zarlink Smiconducor [39]. Układ odbira saliarny sygnał L1 (17,42MHz), zaś na wyjści przkazuj sygnał F o częsoliwości 4,309MHz, co js osiągan przy wykorzysaniu 3-sopniowj konwrsji w dół. Koljn częsoliwości pośrdni o: 3
54 F1 17,42MHz F2 3,42MHz F3 4,309MHz. GP201 charakryzuj się niwilkimi wymiarami oraz małym poborm mocy (ypowo ok. 200 mw); moż być zasilany z źródł 3 oraz V. W procsi konwrsji A/C wykorzysano przwornik o rozdzilczości 2 biów. Układ posiada dwa cyfrow wyjścia, z kórych jdno (SGN oupu) rprznuj polaryzację sygnału F, zaś drugi (MAG oupu) jgo moduł ampliudy (magniud). Schma blokowy urządznia, pochodzący wpros z jgo spcyfikacji przdsawiono poniżj (rys. 29). Rys. 29. Schma blokowy modułu GP201 [40]. Waro zauważyć, iż prznowan rozwiązani odnośni fron-ndu ni js opymaln, gdyż wymusza pracę na jdnym ylko pasmi częsoliwościowym. Nisy na rynku rudno wciąż znalźć fron-ndy zaprojkowan ypowo z myślą o sysmi GALLO, dominują naomias GPS-ow fron-ndy na pasmo L1, sąd ż akimi rozwiązaniami rzba się póki co posiłkować. Nalży się jdnak spodziwać, iż w najbliższym czasi luka a zosani zapłniona i sosown układy pojawią się w sprzdaży, co mogłoby poncjalni wpłynąć na zmianę prznowanj koncpcji. Pożądanym rozwiązanim byłby przykładowo fron-nd oprujący na dwóch zakrsach, j. L1 i, co przd wszyskim umożliwiłoby na rdukcję nikorzysngo wpływu jonosfry na dokładność wykorzysania pozycji (rdukcja a js jdną z podsawowych cch odbiorników dwu- i wiloczęsoliwościowych), a akż ogólny wzros jakości pracy odbiornika. 4
55 Akwizycja (algorym przszukiwania równolgłgo) oraz procs korlacji z wykorzysanim pięciu korlaorów (Vry arly, arly, Promp, La, Vry La) będą ralizowan w układzi FPGA. Sygnał każdgo z saliów musi być przwarzany osobno, w związku z czym nizbędn js wykorzysani 24 równolgłych, idnycznych układów korlaorów, z kórych każdy js odpowidzialny za przwarzani sygnału od jdngo z saliów. Liczba 24 wynika z faku, iż dla dango sysmu w danj chwili odbiornik moż maksymalni odbirać sygnały z 12 saliów. Koniczność zasosowania FPGA, a ni bzpośrdnio procsora sygnałowgo DSP wynika z osrych wymagań wydajnościowych sawianych blokowi. Procs korlacji, kóry musi być ralizowany w czasi rzczywisym jdnoczśni w wilu kanałach, js najbardzij wymagającym pod względm szybkości przwarzania spośród wszyskich bloków funkcjonalnych odbiornika GALLO. W ych warunkach obcn procsory sygnałow mogą okazać się niwysarczając, aby w płni podołać mu zadaniu. W bloku korlaorów nizbędna js obcność lokalnych gnraorów rplik ciągów psudoprzypadkowych,, j. ciągów wykorzysywanych przz GALLO, jak i GPS. Podczas pracy, w zalżności od go z kórgo sysmu korzysa w danj chwili odbiornik, nasępować będzi przłączani pomiędzy odpowidnimi gnraorami. Proponowan plaformy sprzęow przznaczon do ralizacji procsu korlacji o przd wszyskim maryc firm XLNX lub Alra (np. Sraix). Sygnały z wyjść układu FPGA będą przkazywan do procsora nawigacyjngo, odpowidzialngo za srowani pęlami śldzącymi (nośną oraz ciąg kodowy), a akż dkodowani wiadomości nawigacyjnych i w dalszj koljności wyznaczani położnia, prędkości i czasu. Jako podsawę hardwar ową posanowiono wykorzysać u procsor MCF373L firmy Frscal. W przypadku go urządznia bardzij zasadn wydaj się być używani nazwy sysm procsorowy, gdyż ingruj on możliwości obliczniow procsora z bardzo szroką obsługą inrfjsów i urządzń pryfryjnych. Archikurę sysmu MCF373L przdsawia rys. 30. Dla poprawngo funkcjonowania całości odbiornika dan przkazywan z FPGA do procsora są w nim przwarzan clm wyznacznia warości poprawk fazy kodu oraz przsunięcia nośnj, kór są nasępni przsyłan w odwronym kirunku w pęlach DLL i PLL. Układ MF373L wykorzysuj jądro Coldfir V3 Cor umożliwiając ralizację 211 milionów opracji na skundę (211 MPS) przy częsoliwości zgara 240MHz. Spośród cch urządznia nalży wyminić m.in.: 16kB pamięci Cach, 32kB pamięci SRAM oraz dodakowy konrolr pamięci DDR/SDRAM. Ponado - konrolr USB 2.0, a akż konrolr USB On-Th-Go (USB OTG), kóry umożliwia sysmowi pracę zarówno w rybi masr, jak i dvic, konrolr hrn 10/100, a akż 3 obwody UART (Univrsal Asynchronous Transmir/Rcivr) dla bzpośrdnij komunikacji między kompurami i innymi urządzniami. Koncpcja ralizacji go bloku funkcjonalngo odbiornika zakłada uruchomini na omawianym procsorz sysmu opracyjngo UNX, a nasępni insalację maszyny wirualnj JAVY, dzięki czmu obsługa i programowani lmnu byłoby dużo ławijsz i szybsz. Taki rozwiązani ma szrg zal. Sysm UNX znany js z sabilności swojj pracy, bzpiczńswa, umożliwia ż pracę wilowąkową. Darmow dysrybucj konsolow (działając w rybi ksowym) cchują się niskimi wymaganiami sprzęowymi oraz małym zużycim zasobów sprzęowych.
![Rys. 30. Archikura proponowango sysmu mikroprocsorowgo, MCF373L [41]. Z koli podsawową zalą JAVY js jj nizalżność od plaformy sprzęowj oraz sysmu opracyjngo.](/docs-images/20/1002157/images/56-0.png "Język n, podobni jak UNX, w bardzo dużym zakrsi umożliwia pracę wilowąkową (wilopookową); ponado ważną jgo cchą js obsługa klas, kóra znaczni uławia rozszrzani funkcjonalności programu przz pros")
56 Rys. 30. Archikura proponowango sysmu mikroprocsorowgo, MCF373L [41]. Z koli podsawową zalą JAVY js jj nizalżność od plaformy sprzęowj oraz sysmu opracyjngo. Język n, podobni jak UNX, w bardzo dużym zakrsi umożliwia pracę wilowąkową (wilopookową); ponado ważną jgo cchą js obsługa klas, kóra znaczni uławia rozszrzani funkcjonalności programu przz pros dodawani koljnych klas. Na bardzo wysokim poziomi js w Javi obsługa wyjąków, naw niznanych, co wpływa na sabilność worzongo oprogramowania. Wrszci kod wynikowy js objęościowo niwilki (zwłaszcza w porównaniu z innymi językami wysokigo poziomu). Dzięki akimu podjściu js możliwa obsługa całgo odbiornika np. za pośrdnicwm kompura PC na dwóch różnych poziomach. Z jdnj srony - zwnęrzna aplikacja służy jako inrfjs użykownika, do kórgo są przkazywan wyniki pracy odbiornika dan lokalizacyjn, czas, prędkość, a akż, w kórj możliwa js obsługa innych dosępnych aplikacji, zaś z drugij srony z poziomu kompura ralizowan js programowani procsora, zarówno z punku widznia jgo podsawowych funkcji wynikających z samj zasady działania odbiornika GNSS, jak i modyfikowania oraz dodawania nowych usług i aplikacji. Z uwagi na mnogość inrfjsów obsługiwanych przz MCF373L, sposób dwukirunkowj komunikacji między ym odbiornikim a urządznim końcowym ni js ograniczony do jdnj ylko opcji: do dyspozycji js zarówno komunikacja przz USB czy RS232, jak i poprzz hrn. Nalży dodać, ż choć srowani i konfigurowani procsora odbywałoby się nimal wyłączni za pośrdnicwm PC, o z drugij srony kompur wcal ni musi być koniczni urządznim końcowym (wyświlani wyników) moż nim być dowoln urządzni będąc w sani obsługiwać sosowną aplikację. Proponowan rozwiązani zapwnia wysoki poziom uniwrsalności i lasyczności, co js priorym przy opracowywaniu rozwiązań, kór nadążałyby za coraz szybcij dokonującym się posępm chnologicznym. Tym nimnij przjści od koncpcji do 6
57 fizycznj ralizacji urządznia wymaga dalszych prac i badań, w szczgólności dokładnych badań symulacyjnych poszczgólnych bloków funkcjonalnych odbiornika, kór pozwoliłyby zopymalizować sosowan algorymy przd wnualnym przysąpinim do programowania hardwar u. Osobną kwsią js dobór usług i aplikacji związanych z nawigacją morską, kór mogłyby zosać zaimplmnowan w urządzniu. Prac nad ym zagadninim prowadząc do opracowania arakcyjnych rynkowo usług dodakowych będą ralizowan w P-8 w roku
58 8. Podsumowani Z przprowadzonych analiz wynika, ż podsawowym warunkim osiągnięcia sukcsu na przyszłym rynku morskich aplikacji nawigacyjnych, oparych o sysm GALLO, js zbudowani odbiornika, charakryzującgo się dużą lasycznością w jgo poncjalnych zasosowaniach i sosunkowo niska cna w odnisiniu do ofrowanj funkcjonalności. Wydaj się, ż zaproponowana chnologia radia programowalngo js w sani sprosać posawionym zadaniom. W ramach ninijszj pracy sauowj zosała opracowana koncpcja uniwrsalngo odbiornika sygnałów GALLO w chnologii SDR, z możliwością rozszrznia o współpracę z sysmm GPS. Przprowadzona analiza wskazuj, ż js możliw zbudowani akigo odbiornika i co moż być w płni zralizowan po zamknięciu procsu sandaryzacyjngo sysmu GALLO. Jak wiadomo, zbudowani uniwrsalngo odbiornika, umożliwiającgo współpracę z sysmm GALLO oraz GPS js procsm wiloapowym. Ninijsza praca sauowa sanowi pirwszy ap budowy modlu odbiornika w nowaorskij chnologii radia programowalngo. W ym mijscu nalży dodać, ż zdobya widza podczas ralizacji ninijszj pracy sauowj, sanowią cnny mariał dydakyczny dla sudnów z spcjalności lkomunikacja. 8
59 Załącznik 1. Arykuł opublikowany w zszyach naukowych Wydziału T PG 9
60 60
61 61
62 62
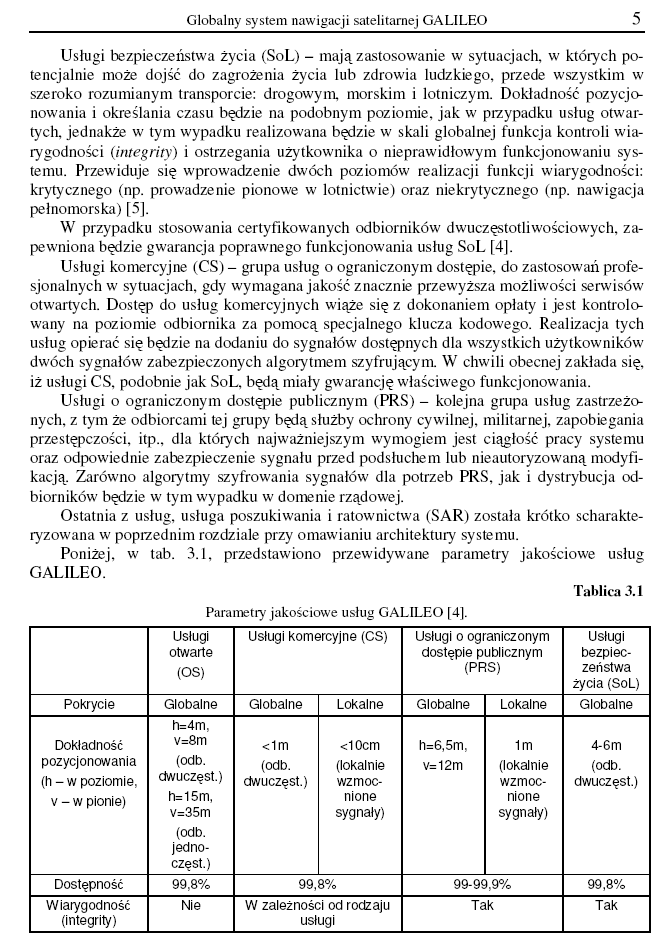
63 63
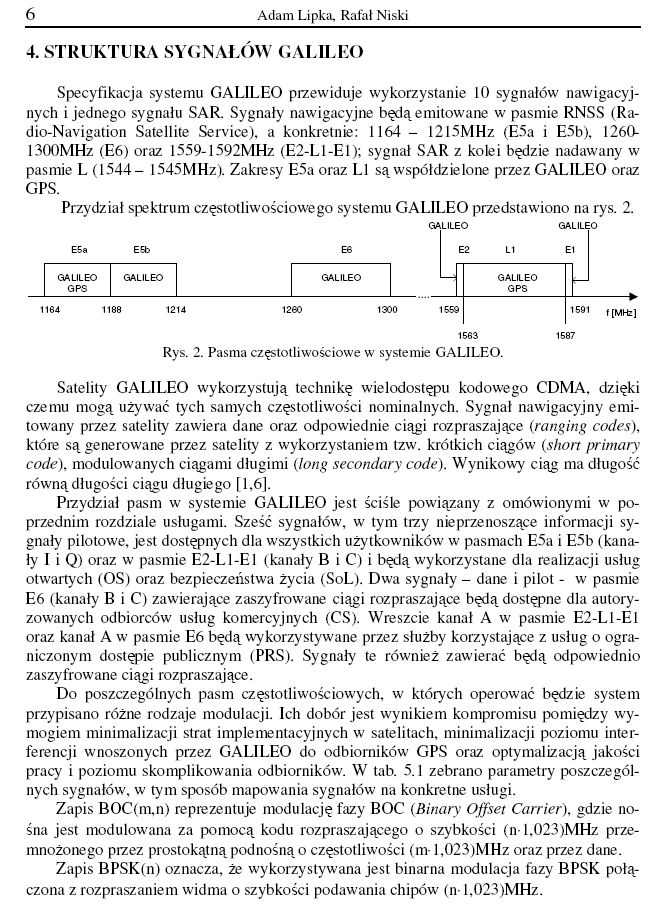
64 64
65 6
66 66
67 Arykuł opublikowany w mariałach z konfrncji MCC2006 w Gdyni Załącznik 2 67
68 68
69 69
70 70
71 71
72 72
73 Arykuł opublikowany w mariałach konfrncji KKRRiTv w Poznaniu Załącznik 3. 73
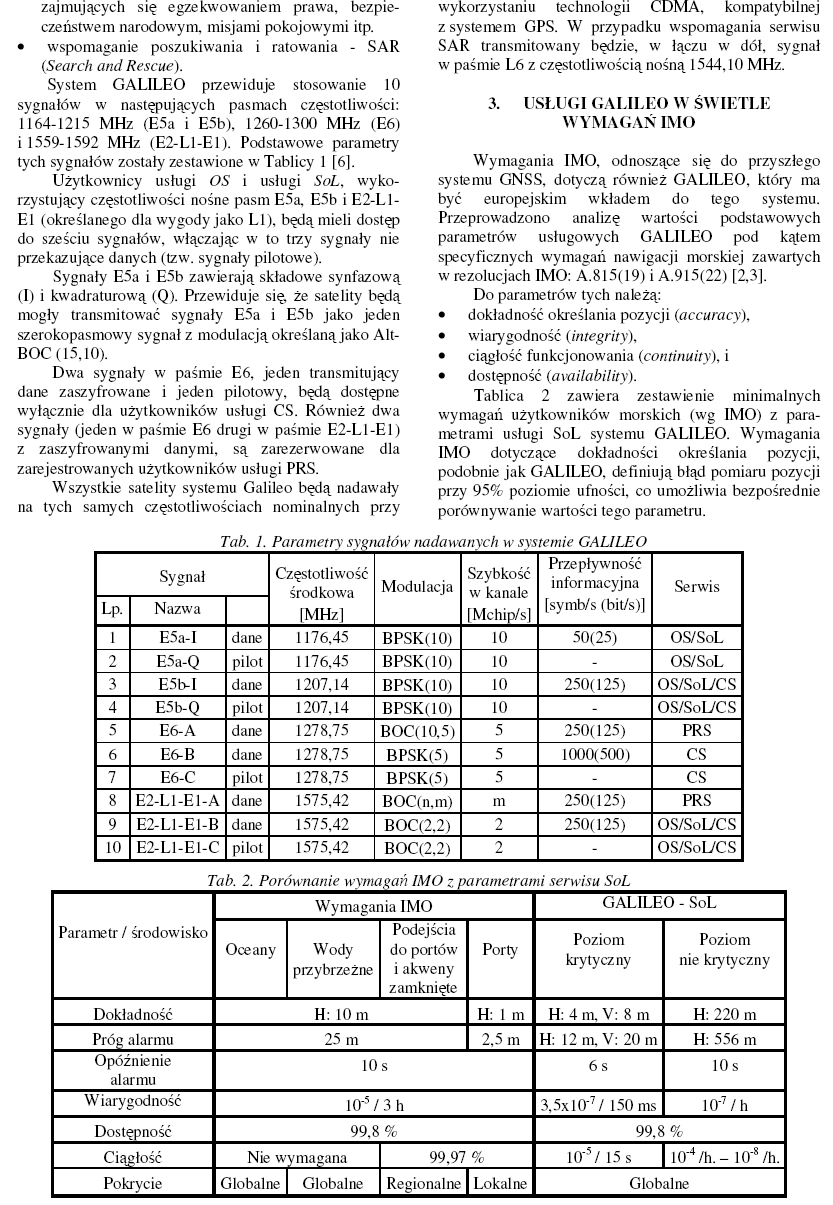
74 74
ĆWICZENIE 11 OPTYMALIZACJA NIEZAWODNOŚCIOWA STRUKTURY ELEKTRONICZNEGO SYSTEMU BEZPIECZEŃSTWA
 ĆWICZENIE OPTYMALIZACJA NIEZAWODNOŚCIOWA STUKTUY ELEKTONICZNEGO SYSTEMU EZPIECZEŃSTWA Cl ćwicznia: zapoznani z analizą nizawodnościowo-ksploaacyjną lkronicznych sysmów bzpiczńswa; wyznaczni wybranych wskaźników
ĆWICZENIE OPTYMALIZACJA NIEZAWODNOŚCIOWA STUKTUY ELEKTONICZNEGO SYSTEMU EZPIECZEŃSTWA Cl ćwicznia: zapoznani z analizą nizawodnościowo-ksploaacyjną lkronicznych sysmów bzpiczńswa; wyznaczni wybranych wskaźników
Ekonomiczno-techniczne aspekty wykorzystania gazu w energetyce
 Ekonomiczno-chniczn aspky wykorzysania gazu w nrgyc anusz oowicz Wydział Inżynirii i Ochrony Środowiska Polichnika Częsochowska zacowani nakładów inwsycyjnych na projky wykorzysania gazu w nrgyc anusz
Ekonomiczno-chniczn aspky wykorzysania gazu w nrgyc anusz oowicz Wydział Inżynirii i Ochrony Środowiska Polichnika Częsochowska zacowani nakładów inwsycyjnych na projky wykorzysania gazu w nrgyc anusz
LABORATORIUM ESBwT. Optymalizacja niezawodnościowa struktury elektronicznego systemu bezpieczeństwa
 ZESPÓŁ LAORATORIÓW TELEMATYKI TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE WYDZIAŁ TRANSPORTU POLITECHNIKI WARSZAWSKIEJ LAORATORIUM ESwT INSTRUKCJA DO ĆWICZENIA nr Opymalizacja nizawodnościowa srukury
ZESPÓŁ LAORATORIÓW TELEMATYKI TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE WYDZIAŁ TRANSPORTU POLITECHNIKI WARSZAWSKIEJ LAORATORIUM ESwT INSTRUKCJA DO ĆWICZENIA nr Opymalizacja nizawodnościowa srukury
LABORATORIUM ESBwT. Program,,Wspomaganie Decyzji Niezawodnościowo-Eksploatacyjnych Transportowych Systemów Nadzoru
 ZESPÓŁ LAORATORIÓW TELEMATYKI TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE WYDZIAŁ TRANSPORTU POLITECHNIKI WARSZAWSKIEJ LAORATORIUM ESwT Program,,Wspomagani Dcyzji Nizawodnościowo-Eksploaacyjnych Transporowych
ZESPÓŁ LAORATORIÓW TELEMATYKI TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE WYDZIAŁ TRANSPORTU POLITECHNIKI WARSZAWSKIEJ LAORATORIUM ESwT Program,,Wspomagani Dcyzji Nizawodnościowo-Eksploaacyjnych Transporowych
POLITECHNIKA WARSZAWSKA WYDZIAŁ TRANSPORTU
 POLITECHNIKA WARSZAWSKA WYDZIAŁ TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE EKSPLOATACJA SYSTEMÓW TELEKOMUNIKACYJNYCH LAORATORIUM Program,,Wspomagani Dcyzji Nizawodnościowo- Eksploaacyjnych Transporowych
POLITECHNIKA WARSZAWSKA WYDZIAŁ TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE EKSPLOATACJA SYSTEMÓW TELEKOMUNIKACYJNYCH LAORATORIUM Program,,Wspomagani Dcyzji Nizawodnościowo- Eksploaacyjnych Transporowych
REGULAMIN PRZYJMOWANIA I PRZEKAZYWANIA ZLECEŃ NABYCIA LUB ZBYCIA INSTRUMENTÓW FINANSOWYCH PRZEZ EFIX DOM MAKLERSKI S.A.
 REGULAMIN PRZYJMOWANIA I PRZEKAZYWANIA ZLECEŃ NABYCIA LUB ZBYCIA INSTRUMENTÓW FINANSOWYCH PRZEZ EFIX DOM MAKLERSKI S.A. Rozdział I. POSTANOWIENIA OGÓLNE 1. Rgulamin okrśla zasady przyjmowania i przkazywania
REGULAMIN PRZYJMOWANIA I PRZEKAZYWANIA ZLECEŃ NABYCIA LUB ZBYCIA INSTRUMENTÓW FINANSOWYCH PRZEZ EFIX DOM MAKLERSKI S.A. Rozdział I. POSTANOWIENIA OGÓLNE 1. Rgulamin okrśla zasady przyjmowania i przkazywania
.pl KSIĄŻKA ZNAKU. Portal Kulturalny Warmii i Mazur. www.eświatowid.pl. Przygotował: Krzysztof Prochera. Zatwierdził: Antoni Czyżyk
 Portalu Kulturalngo Warmii i Mazur www.światowid Przygotował: Krzysztof Prochra... Zatwirdził: Antoni Czyżyk... Elbląg, dn. 4.12.2014 Płna forma nazwy prawnj: www.światowid Formy płnj nazwy prawnj nalży
Portalu Kulturalngo Warmii i Mazur www.światowid Przygotował: Krzysztof Prochra... Zatwirdził: Antoni Czyżyk... Elbląg, dn. 4.12.2014 Płna forma nazwy prawnj: www.światowid Formy płnj nazwy prawnj nalży
POLITECHNIKA WARSZAWSKA Instytut Elektroenergetyki, Zakład Elektrowni i Gospodarki Elektroenergetycznej
 POLITECHIA WARSZAWSA Insyu Elkronrgyki, Zakład Elkrowni i Gospodarki Elkronrgycznj Ekonomika wywarzania, przwarzania i uŝykowania nrgii lkrycznj - laboraorium Insrukcja do ćwicznia p.: Obliczani koszów
POLITECHIA WARSZAWSA Insyu Elkronrgyki, Zakład Elkrowni i Gospodarki Elkronrgycznj Ekonomika wywarzania, przwarzania i uŝykowania nrgii lkrycznj - laboraorium Insrukcja do ćwicznia p.: Obliczani koszów
Stanowisko laboratoryjne do badań przesuwników fazowych
 Polichnika Śląska Wydział Elkryczny Insyu Mrologii i Auomayki Elkrochniczn Tma pracy: Sanowisko laboraoryn do badań przsuwników fazowych Promoor: Dr inż. Adam Cichy Dyploman: Adam Duna Srukura rfrau. Wsęp.
Polichnika Śląska Wydział Elkryczny Insyu Mrologii i Auomayki Elkrochniczn Tma pracy: Sanowisko laboraoryn do badań przsuwników fazowych Promoor: Dr inż. Adam Cichy Dyploman: Adam Duna Srukura rfrau. Wsęp.
Katastrofą budowlaną jest nie zamierzone, gwałtowne zniszczenie obiektu budowlanego lub jego części, a także konstrukcyjnych elementów rusztowań,
 O A A O O! Katastrofą budowlaną jst ni zamirzon, gwałtown zniszczni obiktu budowlango lub jgo części, a takż konstrukcyjnych lmntów rusztowań, lmntów formujących, ściank szczlnych i obudowy wykopów (art.
O A A O O! Katastrofą budowlaną jst ni zamirzon, gwałtown zniszczni obiktu budowlango lub jgo części, a takż konstrukcyjnych lmntów rusztowań, lmntów formujących, ściank szczlnych i obudowy wykopów (art.
REGULAMIN PSKO 2016. I. Kryteria i wymagania dla zawodników Optimist PSKO. II. Mistrzostwa PSKO. III. Puchar Polski PSKO
 I. Krytria i wymagania dla zawodników Optimist PSKO 1. W rgatach PSKO mogą startować zawodnicy do lat 15 posiadający licncję sportową PZŻ, aktualn ubzpiczni OC i będący członkami PSKO, spłniający wymagania
I. Krytria i wymagania dla zawodników Optimist PSKO 1. W rgatach PSKO mogą startować zawodnicy do lat 15 posiadający licncję sportową PZŻ, aktualn ubzpiczni OC i będący członkami PSKO, spłniający wymagania
ZASTOSOWANIE REGRESJI LOGISTYCZNEJ DO OKREŚLENIA PRAWDOPODOBIEŃSTWA SPRZEDAŻY ZASOBU MIESZKANIOWEGO
 ZASTOSOWANIE REGRESJI LOGISTYCZNEJ DO OKREŚLENIA PRAWDOPODOBIEŃSTWA SPRZEDAŻY ZASOBU MIESZKANIOWEGO Łukasz MACH Strszczni: W artykul przdstawiono procs budowy modlu rgrsji logistycznj, którgo clm jst wspomagani
ZASTOSOWANIE REGRESJI LOGISTYCZNEJ DO OKREŚLENIA PRAWDOPODOBIEŃSTWA SPRZEDAŻY ZASOBU MIESZKANIOWEGO Łukasz MACH Strszczni: W artykul przdstawiono procs budowy modlu rgrsji logistycznj, którgo clm jst wspomagani
Zakład Ubezpieczeń Społecznych Departament Zamówień Publicznych ul. Szamocka 3, 5, 01-748 Warszawa tel: 22 667 17 04, fax: 22 667 17 33
 Zakład Ubzpiczń Społcznych Dpartamnt Zamówiń Publicznych ul. Szamocka 3, 5, 01-748 Warszawa tl: 22 667 17 04, fax: 22 667 17 33 993200/271/IN- 268/15 Warszawa, dnia 19.03.2015 r. Informacja dla Wykonawców,
Zakład Ubzpiczń Społcznych Dpartamnt Zamówiń Publicznych ul. Szamocka 3, 5, 01-748 Warszawa tl: 22 667 17 04, fax: 22 667 17 33 993200/271/IN- 268/15 Warszawa, dnia 19.03.2015 r. Informacja dla Wykonawców,
REGULAMIN ŚWIADCZENIA USŁUGI DORADZTWA DLA PRZEDSIĘBIORSTW W EFIX DOM MAKLERSKI S.A.
 REGULAMIN ŚWIADCZENIA USŁUGI DORADZTWA DLA PRZEDSIĘBIORSTW W EFIX DOM MAKLERSKI S.A. Rozdział I. POSTANOWIENIA OGÓLNE 1. Rgulamin okrśla zasady świadcznia usługi doradztwa dla przdsiębiorstw w zakrsi:
REGULAMIN ŚWIADCZENIA USŁUGI DORADZTWA DLA PRZEDSIĘBIORSTW W EFIX DOM MAKLERSKI S.A. Rozdział I. POSTANOWIENIA OGÓLNE 1. Rgulamin okrśla zasady świadcznia usługi doradztwa dla przdsiębiorstw w zakrsi:
Wykład 6 Pochodna, całka i równania różniczkowe w praktycznych zastosowaniach w elektrotechnice.
 Wykład 6 Pochodna, całka i równania różniczkow w prakycznych zasosowaniach w lkrochnic. Przypomnini: Dfinicja pochodnj: Granica ilorazu różnicowgo-przyros warości funkcji do przyrosu argumnów-przy przyrości
Wykład 6 Pochodna, całka i równania różniczkow w prakycznych zasosowaniach w lkrochnic. Przypomnini: Dfinicja pochodnj: Granica ilorazu różnicowgo-przyros warości funkcji do przyrosu argumnów-przy przyrości
Farmakokinetyka furaginy jako przykład procesu pierwszego rzędu w modelu jednokompartmentowym zawierającym sztuczną nerkę jako układ eliminujący lek
 1 Matriał tortyczny do ćwicznia dostępny jst w oddzilnym dokumnci, jak równiż w książc: Hrmann T., Farmakokintyka. Toria i praktyka. Wydawnictwa Lkarski PZWL, Warszawa 2002, s. 13-74 Ćwiczni 6: Farmakokintyka
1 Matriał tortyczny do ćwicznia dostępny jst w oddzilnym dokumnci, jak równiż w książc: Hrmann T., Farmakokintyka. Toria i praktyka. Wydawnictwa Lkarski PZWL, Warszawa 2002, s. 13-74 Ćwiczni 6: Farmakokintyka
2.1 Zagadnienie Cauchy ego dla równania jednorodnego. = f(x, t) dla x R, t > 0, (2.1)
 dla x R, t > 0, (2.1)") Wykład 2 Sruna nieograniczona 2.1 Zagadnienie Cauchy ego dla równania jednorodnego Równanie gań sruny jednowymiarowej zapisać można w posaci 1 2 u c 2 2 u = f(x, ) dla x R, >, (2.1) 2 x2 gdzie u(x, ) oznacza
Wykład 2 Sruna nieograniczona 2.1 Zagadnienie Cauchy ego dla równania jednorodnego Równanie gań sruny jednowymiarowej zapisać można w posaci 1 2 u c 2 2 u = f(x, ) dla x R, >, (2.1) 2 x2 gdzie u(x, ) oznacza
Analiza danych jakościowych
 Analiza danych jakościowych Ccha ciągła a ccha dyskrtna! Ciągła kg Dyskrtna Cchy jakościow są to cchy, których jdnoznaczn i oczywist scharaktryzowani za pomocą liczb jst nimożliw lub bardzo utrudnion.
Analiza danych jakościowych Ccha ciągła a ccha dyskrtna! Ciągła kg Dyskrtna Cchy jakościow są to cchy, których jdnoznaczn i oczywist scharaktryzowani za pomocą liczb jst nimożliw lub bardzo utrudnion.
Badanie funktorów logicznych TTL - ćwiczenie 1
 adanie funkorów logicznych TTL - ćwiczenie 1 1. Cel ćwiczenia Zapoznanie się z podsawowymi srukurami funkorów logicznych realizowanych w echnice TTL (Transisor Transisor Logic), ich podsawowymi paramerami
adanie funkorów logicznych TTL - ćwiczenie 1 1. Cel ćwiczenia Zapoznanie się z podsawowymi srukurami funkorów logicznych realizowanych w echnice TTL (Transisor Transisor Logic), ich podsawowymi paramerami
Laboratorium Półprzewodniki Dielektryki Magnetyki Ćwiczenie nr 11 Badanie materiałów ferromagnetycznych
 Laboratorium Półprzwodniki Dilktryki Magntyki Ćwiczni nr Badani matriałów frromagntycznych I. Zagadninia do przygotowania:. Podstawow wilkości charaktryzując matriały magntyczn. Związki pomiędzy B, H i
Laboratorium Półprzwodniki Dilktryki Magntyki Ćwiczni nr Badani matriałów frromagntycznych I. Zagadninia do przygotowania:. Podstawow wilkości charaktryzując matriały magntyczn. Związki pomiędzy B, H i
Warstwa fizyczna. Model OSI Model TCP/IP. Aplikacji. Aplikacji. Prezentacji. Sesji. Transportowa. Transportowa. Sieciowa. Sieciowa.
 Warswa fizyczna Model OSI Model TCP/IP Aplikacji Prezenacji Aplikacji Sesji Transporowa Sieciowa Transporowa Sieciowa przesłanie informacji przez nośnik fizyczny Łącza danych Fizyczna Dosępu do sieci Przegląd
Warswa fizyczna Model OSI Model TCP/IP Aplikacji Prezenacji Aplikacji Sesji Transporowa Sieciowa Transporowa Sieciowa przesłanie informacji przez nośnik fizyczny Łącza danych Fizyczna Dosępu do sieci Przegląd
C d u. Po podstawieniu prądu z pierwszego równania do równania drugiego i uporządkowaniu składników lewej strony uzyskuje się:
 Zadanie. Obliczyć przebieg napięcia na pojemności C w sanie przejściowym przebiegającym przy nasępującej sekwencji działania łączników: ) łączniki Si S są oware dla < 0, ) łącznik S zamyka się w chwili
Zadanie. Obliczyć przebieg napięcia na pojemności C w sanie przejściowym przebiegającym przy nasępującej sekwencji działania łączników: ) łączniki Si S są oware dla < 0, ) łącznik S zamyka się w chwili
5. Usługodawca jest administratorem danych swoich klientów. Oznacza to, że jeśli posiadasz Konto na naszej
 .1 Posanowienia Ogólne 1. Adminisraorem danych jes Sunday Morning Doradzwo Personalne Aleksandra Bukowska z siedzibą w Łodzi, ul Bałycka 32b/22, NIP: 7282225534, REGON: 365983994. Ochrona danych odbywa
.1 Posanowienia Ogólne 1. Adminisraorem danych jes Sunday Morning Doradzwo Personalne Aleksandra Bukowska z siedzibą w Łodzi, ul Bałycka 32b/22, NIP: 7282225534, REGON: 365983994. Ochrona danych odbywa
PROJEKT nr 1 Projekt spawanego węzła kratownicy. Sporządził: Andrzej Wölk
 PROJEKT nr 1 Projek spawanego węzła kraownicy Sporządził: Andrzej Wölk Projek pojedynczego węzła spawnego kraownicy Siły: 1 = 10 3 = -10 Kąy: α = 5 o β = 75 o γ = 75 o Schema węzła kraownicy Dane: Grubość
PROJEKT nr 1 Projek spawanego węzła kraownicy Sporządził: Andrzej Wölk Projek pojedynczego węzła spawnego kraownicy Siły: 1 = 10 3 = -10 Kąy: α = 5 o β = 75 o γ = 75 o Schema węzła kraownicy Dane: Grubość
POLITYKA BEZPIECZEŃSTWA OKTAWAVE (dalej również: Polityka )
") POLITYKA BEZPIECZEŃSTWA OKTAWAVE (dalj równiż: Polityka ) wrsja: 20150201.1 Wyrazy pisan wilką litrą, a nizdfiniowan w Polityc mają znacznia nadan im odpowidnio w Rgulamini świadcznia usług Oktawav dla
POLITYKA BEZPIECZEŃSTWA OKTAWAVE (dalj równiż: Polityka ) wrsja: 20150201.1 Wyrazy pisan wilką litrą, a nizdfiniowan w Polityc mają znacznia nadan im odpowidnio w Rgulamini świadcznia usług Oktawav dla
ψ przedstawia zależność
 Ruch falowy 4-4 Ruch falowy Ruch falowy polega na rozchodzeniu się zaburzenia (odkszałcenia) w ośrodku sprężysym Wielkość zaburzenia jes, podobnie jak w przypadku drgań, funkcją czasu () Zaburzenie rozchodzi
Ruch falowy 4-4 Ruch falowy Ruch falowy polega na rozchodzeniu się zaburzenia (odkszałcenia) w ośrodku sprężysym Wielkość zaburzenia jes, podobnie jak w przypadku drgań, funkcją czasu () Zaburzenie rozchodzi
Przetwarzanie sygnałów biomedycznych
 Prztwarzani sygnałów biomdycznych dr hab. inż. Krzysztof Kałużyński, prof. PW Człowik- najlpsza inwstycja Projkt współfinansowany przz Unię Europjską w ramach Europjskigo Funduszu Społczngo Wykład XI Filtracja
Prztwarzani sygnałów biomdycznych dr hab. inż. Krzysztof Kałużyński, prof. PW Człowik- najlpsza inwstycja Projkt współfinansowany przz Unię Europjską w ramach Europjskigo Funduszu Społczngo Wykład XI Filtracja
Perspektywy rozwoju rolnictwa ekologicznego w Polsce
 Anna urczak Zachodniopomorska Szkoła Biznsu w Szczcini Prspktywy rozwoju rolnictwa kologiczngo w Polsc Strszczni W artykul wyjaśniono istotę rolnictwa kologiczngo Następni szczgółowo omówiono zasady, na
Anna urczak Zachodniopomorska Szkoła Biznsu w Szczcini Prspktywy rozwoju rolnictwa kologiczngo w Polsc Strszczni W artykul wyjaśniono istotę rolnictwa kologiczngo Następni szczgółowo omówiono zasady, na
CHARAKTERYSTYKA OBCIĄŻENIOWA
 Opracowani: dr inż. Ewa Fudalj-Kostrzwa CHARAKTERYSTYKA OBCIĄŻENIOWA Charaktrystyki obciążniow są wyznaczan w ramach klasycznych statycznych badań silników zarówno dla silników o zapłoni iskrowym jak i
Opracowani: dr inż. Ewa Fudalj-Kostrzwa CHARAKTERYSTYKA OBCIĄŻENIOWA Charaktrystyki obciążniow są wyznaczan w ramach klasycznych statycznych badań silników zarówno dla silników o zapłoni iskrowym jak i
Analiza wybranych własności rozkładu reszt
 Analiza wybranych własności rozkładu rsz Poprawni skonsruowany i oszacowany modl, kóry nasępni ma być wykorzysany do clów analizy i prdykcji, poza wysokim sopnim odzwircidlania zmian warości mpirycznych
Analiza wybranych własności rozkładu rsz Poprawni skonsruowany i oszacowany modl, kóry nasępni ma być wykorzysany do clów analizy i prdykcji, poza wysokim sopnim odzwircidlania zmian warości mpirycznych
DYNAMIKA KONSTRUKCJI
 10. DYNAMIKA KONSTRUKCJI 1 10. 10. DYNAMIKA KONSTRUKCJI 10.1. Wprowadzenie Ogólne równanie dynamiki zapisujemy w posaci: M d C d Kd =P (10.1) Zapis powyższy oznacza, że równanie musi być spełnione w każdej
10. DYNAMIKA KONSTRUKCJI 1 10. 10. DYNAMIKA KONSTRUKCJI 10.1. Wprowadzenie Ogólne równanie dynamiki zapisujemy w posaci: M d C d Kd =P (10.1) Zapis powyższy oznacza, że równanie musi być spełnione w każdej
Wstęp... 1. Rozdział 2 Wpływ inflacji na koszt użycia kapitału... 17 2.1 Inflacja i koszt użycia kapitału...17 2.2 Finansowanie pożyczkami...
 Spis rści Wsęp... Rozdział Podakowa rozja kapiału a warość przdsiębiorswa... 3.. Isoa rozji kapiału...3... Gospodarka bz podaków... 3..2. Gospodarka z podakai... 4..3. Ilusracja podakowj rozji kapiału...
Spis rści Wsęp... Rozdział Podakowa rozja kapiału a warość przdsiębiorswa... 3.. Isoa rozji kapiału...3... Gospodarka bz podaków... 3..2. Gospodarka z podakai... 4..3. Ilusracja podakowj rozji kapiału...
Uogólnione wektory własne
 Uogólnion wktory własn m Dfinicja: Wktor nazywamy uogólnionym wktorm własnym rzędu m macirzy A do wartości własnj λ jśli ( A - I) m m- λ al ( A - λ I) Przykład: Znajdź uogólniony wktor własny rzędu do
Uogólnion wktory własn m Dfinicja: Wktor nazywamy uogólnionym wktorm własnym rzędu m macirzy A do wartości własnj λ jśli ( A - I) m m- λ al ( A - λ I) Przykład: Znajdź uogólniony wktor własny rzędu do
WNIOSKOWANIE STATYSTYCZNE
 Wnioskowanie saysyczne w ekonomerycznej analizie procesu produkcyjnego / WNIOSKOWANIE STATYSTYCZNE W EKONOMETRYCZNEJ ANAIZIE PROCESU PRODUKCYJNEGO Maeriał pomocniczy: proszę przejrzeć srony www.cyf-kr.edu.pl/~eomazur/zadl4.hml
Wnioskowanie saysyczne w ekonomerycznej analizie procesu produkcyjnego / WNIOSKOWANIE STATYSTYCZNE W EKONOMETRYCZNEJ ANAIZIE PROCESU PRODUKCYJNEGO Maeriał pomocniczy: proszę przejrzeć srony www.cyf-kr.edu.pl/~eomazur/zadl4.hml
LVIII Egzamin dla Aktuariuszy z 3 października 2011 r.
 Komisja Egzamiacyja la Akuariuszy LIII Egzami la Akuariuszy z 3 paźzirika 0 r. Część II Mamayka ubzpiczń życiowych Imię i azwisko osoby gzamiowaj:... Czas gzamiu: 00 miu Warszawa, 3 paźzirika 0 r. Mamayka
Komisja Egzamiacyja la Akuariuszy LIII Egzami la Akuariuszy z 3 paźzirika 0 r. Część II Mamayka ubzpiczń życiowych Imię i azwisko osoby gzamiowaj:... Czas gzamiu: 00 miu Warszawa, 3 paźzirika 0 r. Mamayka
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji.
 Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
BUDYNEK OŚRODKA SZKOLENIA W WARSZAWIE KW PSP w WARSZAWIE i JEDNOSTKI RATOWNICZO-GAŚNICZEJ NR 8 KM PSP w WASZAWIE ul. Majdańskia 38/40, 04-110 Warszawa
 DOKUMENTACJA OKREŚLAJĄCA SCENARIUSZ ODNIESIENIA (baseline) oraz OSZACOWANIE EMISJI I REDUKCJI, OGRANICZENIA LUB UNIKNIĘCIA EMISJI BUDYNEK OŚRODKA SZKOLENIA W WARSZAWIE KW PSP w WARSZAWIE i JEDNOSTKI RATOWNICZO-GAŚNICZEJ
DOKUMENTACJA OKREŚLAJĄCA SCENARIUSZ ODNIESIENIA (baseline) oraz OSZACOWANIE EMISJI I REDUKCJI, OGRANICZENIA LUB UNIKNIĘCIA EMISJI BUDYNEK OŚRODKA SZKOLENIA W WARSZAWIE KW PSP w WARSZAWIE i JEDNOSTKI RATOWNICZO-GAŚNICZEJ
- Jeśli dany papier charakteryzuje się wskaźnikiem beta równym 1, to premia za ryzyko tego papieru wartościowego równa się wartości premii rynkowej.
 Śrdni waŝony koszt kapitału (WACC) Spółki mogą korzystać z wilu dostępnych na rynku źródł finansowania: akcj zwykł, kapitał uprzywiljowany, krdyty bankow, obligacj, obligacj zaminn itd. W warunkach polskich
Śrdni waŝony koszt kapitału (WACC) Spółki mogą korzystać z wilu dostępnych na rynku źródł finansowania: akcj zwykł, kapitał uprzywiljowany, krdyty bankow, obligacj, obligacj zaminn itd. W warunkach polskich
WYKORZYSTANIE STATISTICA DATA MINER DO PROGNOZOWANIA W KRAJOWYM DEPOZYCIE PAPIERÓW WARTOŚCIOWYCH
 SaSof Polska, el. 12 428 43 00, 601 41 41 51, info@sasof.pl, www.sasof.pl WYKORZYSTANIE STATISTICA DATA MINER DO PROGNOZOWANIA W KRAJOWYM DEPOZYCIE PAPIERÓW WARTOŚCIOWYCH Joanna Maych, Krajowy Depozy Papierów
SaSof Polska, el. 12 428 43 00, 601 41 41 51, info@sasof.pl, www.sasof.pl WYKORZYSTANIE STATISTICA DATA MINER DO PROGNOZOWANIA W KRAJOWYM DEPOZYCIE PAPIERÓW WARTOŚCIOWYCH Joanna Maych, Krajowy Depozy Papierów
Instrukcja do ćwiczenia laboratoryjnego. Badanie liczników
 Insrukcja do ćwiczenia laboraoryjnego Badanie liczników Opracował: mgr inż. Andrzej Biedka Wymagania, znajomość zagadnień: 3. 4. Budowa licznika cyfrowego. zielnik częsoliwości, różnice między licznikiem
Insrukcja do ćwiczenia laboraoryjnego Badanie liczników Opracował: mgr inż. Andrzej Biedka Wymagania, znajomość zagadnień: 3. 4. Budowa licznika cyfrowego. zielnik częsoliwości, różnice między licznikiem
Rozdział 4 Instrukcje sekwencyjne
 Rozdział 4 Insrukcje sekwencyjne Lisa insrukcji sekwencyjnych FBs-PLC przedsawionych w niniejszym rozdziale znajduje się w rozdziale 3.. Zasady kodowania przy zasosowaniu ych insrukcji opisane są w rozdziale
Rozdział 4 Insrukcje sekwencyjne Lisa insrukcji sekwencyjnych FBs-PLC przedsawionych w niniejszym rozdziale znajduje się w rozdziale 3.. Zasady kodowania przy zasosowaniu ych insrukcji opisane są w rozdziale
2. Tablica routingu dla pewnej sieci złożonej z czterech węzłów wygląda następująco:
 Colloquium 4, Grupa A. Jaką oszczędność w zarządzaniu działm Biura Obsługi Klina (polgającą na rdukcji liczby sanowisk obsługi) mogą odnoować dwa połączon przdsiębiorswa, jżli: a. każda z firm przd połącznim
Colloquium 4, Grupa A. Jaką oszczędność w zarządzaniu działm Biura Obsługi Klina (polgającą na rdukcji liczby sanowisk obsługi) mogą odnoować dwa połączon przdsiębiorswa, jżli: a. każda z firm przd połącznim
Kombinowanie prognoz. - dlaczego należy kombinować prognozy? - obejmowanie prognoz. - podstawowe metody kombinowania prognoz
 Noaki do wykładu 005 Kombinowanie prognoz - dlaczego należy kombinować prognozy? - obejmowanie prognoz - podsawowe meody kombinowania prognoz - przykłady kombinowania prognoz gospodarki polskiej - zalecenia
Noaki do wykładu 005 Kombinowanie prognoz - dlaczego należy kombinować prognozy? - obejmowanie prognoz - podsawowe meody kombinowania prognoz - przykłady kombinowania prognoz gospodarki polskiej - zalecenia
POMIAR PARAMETRÓW SYGNAŁOW NAPIĘCIOWYCH METODĄ PRÓKOWANIA I CYFROWEGO PRZETWARZANIA SYGNAŁU
 Pomiar paramerów sygnałów napięciowych. POMIAR PARAMERÓW SYGNAŁOW NAPIĘCIOWYCH MEODĄ PRÓKOWANIA I CYFROWEGO PRZEWARZANIA SYGNAŁU Cel ćwiczenia Poznanie warunków prawidłowego wyznaczania elemenarnych paramerów
Pomiar paramerów sygnałów napięciowych. POMIAR PARAMERÓW SYGNAŁOW NAPIĘCIOWYCH MEODĄ PRÓKOWANIA I CYFROWEGO PRZEWARZANIA SYGNAŁU Cel ćwiczenia Poznanie warunków prawidłowego wyznaczania elemenarnych paramerów
Postęp techniczny. Model lidera-naśladowcy. Dr hab. Joanna Siwińska-Gorzelak
 Posęp echniczny. Model lidera-naśladowcy Dr hab. Joanna Siwińska-Gorzelak Założenia Rozparujemy dwa kraje; kraj 1 jes bardziej zaawansowany echnologicznie (lider); kraj 2 jes mniej zaawansowany i nie worzy
Posęp echniczny. Model lidera-naśladowcy Dr hab. Joanna Siwińska-Gorzelak Założenia Rozparujemy dwa kraje; kraj 1 jes bardziej zaawansowany echnologicznie (lider); kraj 2 jes mniej zaawansowany i nie worzy
NARODOWY FUNDUSZ INWESTYCYJNY PROGRESS S.A.
 NARODOWY FUNDUSZ INWESTYCYJNY PROGRESS S.A. RAPORT UZUPEŁNIAJĄCY OPINIĘ Z BADANIA INFORMACJI FINANSOWEJ, OBEJMUJĄCEJ WPROWADZENIE, BILANS, RACHUNEK ZYSKÓW I STRAT ORAZ DODATKOWE INFORMACJE I OBJAŚNIENIA
NARODOWY FUNDUSZ INWESTYCYJNY PROGRESS S.A. RAPORT UZUPEŁNIAJĄCY OPINIĘ Z BADANIA INFORMACJI FINANSOWEJ, OBEJMUJĄCEJ WPROWADZENIE, BILANS, RACHUNEK ZYSKÓW I STRAT ORAZ DODATKOWE INFORMACJE I OBJAŚNIENIA
Definicja: Wektor nazywamy uogólnionym wektorem własnym rzędu m macierzy A
 Uogólnion wktory własnw Dfinicja: Wktor nazywamy uogólnionym wktorm własnym rzędu m macirzy A m do wartości własnj λ jśli ( A - I) m m- λ al ( A - λ I) Przykład: Znajdź uogólniony wktor własny rzędu do
Uogólnion wktory własnw Dfinicja: Wktor nazywamy uogólnionym wktorm własnym rzędu m macirzy A m do wartości własnj λ jśli ( A - I) m m- λ al ( A - λ I) Przykład: Znajdź uogólniony wktor własny rzędu do
Kontroler ruchu i kierunku obrotów KFD2-SR2-2.W.SM. Charakterystyka. Konstrukcja. Funkcja. Przyłącze
 Konroler ruchu i kierunku obroów Charakerysyka Konsrukcja -kanałowy separaor galwaniczny Zasilanie 4 V DC Wejścia ypu PNP/push-pull, syk lub Programowane częsoliwości graniczne wyjścia syku przekaźnika
Konroler ruchu i kierunku obroów Charakerysyka Konsrukcja -kanałowy separaor galwaniczny Zasilanie 4 V DC Wejścia ypu PNP/push-pull, syk lub Programowane częsoliwości graniczne wyjścia syku przekaźnika
E2. BADANIE OBWODÓW PRĄDU PRZEMIENNEGO
 E. BADANE OBWODÓW PĄDU PZEMENNEGO ks opracowały: Jadwga Szydłowska Bożna Janowska-Dmoch Badać będzmy charakrysyk obwodów zawrających różn układy lmnów akch jak: opornk, cwka kondnsaor, połączonych z sobą
E. BADANE OBWODÓW PĄDU PZEMENNEGO ks opracowały: Jadwga Szydłowska Bożna Janowska-Dmoch Badać będzmy charakrysyk obwodów zawrających różn układy lmnów akch jak: opornk, cwka kondnsaor, połączonych z sobą
4.2. Obliczanie przewodów grzejnych metodą dopuszczalnego obciążenia powierzchniowego
 4.. Obliczanie przewodów grzejnych meodą dopuszczalnego obciążenia powierzchniowego Meodą częściej sosowaną w prakyce projekowej niż poprzednia, jes meoda dopuszczalnego obciążenia powierzchniowego. W
4.. Obliczanie przewodów grzejnych meodą dopuszczalnego obciążenia powierzchniowego Meodą częściej sosowaną w prakyce projekowej niż poprzednia, jes meoda dopuszczalnego obciążenia powierzchniowego. W
Zestawienie produktów
 EPIC B, G, G, X7 Paźdirnik Sysmy poliylnow PE, PE 00 sawini produków DO BUDOWY SIECI WODOCIĄGOWYC, SIECI DYSTRYBUCYJNYC GAU, KANAIACJI CIŚNIENIOWEJ, INSTAACJI PREYSŁOWYC Sysmy doskonał dla sici infrasrukuralnych
EPIC B, G, G, X7 Paźdirnik Sysmy poliylnow PE, PE 00 sawini produków DO BUDOWY SIECI WODOCIĄGOWYC, SIECI DYSTRYBUCYJNYC GAU, KANAIACJI CIŚNIENIOWEJ, INSTAACJI PREYSŁOWYC Sysmy doskonał dla sici infrasrukuralnych
Politechnika Częstochowska Wydział Inżynierii Mechanicznej i Informatyki. Sprawozdanie #2 z przedmiotu: Prognozowanie w systemach multimedialnych
 Poliechnika Częsochowska Wydział Inżynierii Mechanicznej i Informayki Sprawozdanie #2 z przedmiou: Prognozowanie w sysemach mulimedialnych Andrzej Siwczyński Andrzej Rezler Informayka Rok V, Grupa IO II
Poliechnika Częsochowska Wydział Inżynierii Mechanicznej i Informayki Sprawozdanie #2 z przedmiou: Prognozowanie w sysemach mulimedialnych Andrzej Siwczyński Andrzej Rezler Informayka Rok V, Grupa IO II
Koszty zadań planowanych do realizacji w ramach opisywaych etapów. Cena jednostkowa (w zł) Ilość / liczba. Jedn. miary 60,00. m-c
 Ilość / liczba. Jedn. miary 60,00. m-c") Oznaczni / I Wyszczgólnini kosztów ralizacji ponisionych / poprzdnich tapach 3 Jdn. Cna jdnostkowa Koszty zadań planowanych do ralizacji w ramach opisywaych 0 2 Funkcjonowani LGD koszty funkcjonowania
Oznaczni / I Wyszczgólnini kosztów ralizacji ponisionych / poprzdnich tapach 3 Jdn. Cna jdnostkowa Koszty zadań planowanych do ralizacji w ramach opisywaych 0 2 Funkcjonowani LGD koszty funkcjonowania
dr Bartłomiej Rokicki Katedra Makroekonomii i Teorii Handlu Zagranicznego Wydział Nauk Ekonomicznych UW
 Kaedra Makroekonomii i Teorii Handlu Zagranicznego Wydział Nauk Ekonomicznych UW Sposoby usalania płac w gospodarce Jednym z głównych powodów, dla kórych na rynku pracy obserwujemy poziom bezrobocia wyższy
Kaedra Makroekonomii i Teorii Handlu Zagranicznego Wydział Nauk Ekonomicznych UW Sposoby usalania płac w gospodarce Jednym z głównych powodów, dla kórych na rynku pracy obserwujemy poziom bezrobocia wyższy
Inwestycje. MPK = R/P = uc (1) gdzie uc - realny koszt pozyskania kapitału. Przyjmując, że funkcja produkcji ma postać Cobba-Douglasa otrzymamy: (3)
 gdzie uc - realny koszt pozyskania kapitału. Przyjmując, że funkcja produkcji ma postać Cobba-Douglasa otrzymamy: (3)") Dr Barłomij Rokicki Ćwiczia z Makrokoomii II Iwsycj Iwsycj są ym składikim PB, kóry wykazuj ajwiększą skłoość do flukuacji czyli wahań. Spadk popyu a dobra i usługi jaki js obsrwoway podczas rcsji zwykl
Dr Barłomij Rokicki Ćwiczia z Makrokoomii II Iwsycj Iwsycj są ym składikim PB, kóry wykazuj ajwiększą skłoość do flukuacji czyli wahań. Spadk popyu a dobra i usługi jaki js obsrwoway podczas rcsji zwykl
ASY PALI. Tadeusz Uhl*, Maciej Kaliski*, Łukasz Sękiewicz* *Akademia Górniczo - Hutnicza w Krakowie STRESZCZENIE SŁOWA KLUCZOWE: NR 59-60/2007
 Tadusz Uhl*, Macij Kaliski*, Łukasz Sękiwicz* *Akadmia Górniczo - Hutnicza w Krakowi ASY PALI IE I E II STRESZCZENIE Artykuł zawira informacj na tmat zastosowania ogniw paliwowych jako gnratorów nrgii
Tadusz Uhl*, Macij Kaliski*, Łukasz Sękiwicz* *Akadmia Górniczo - Hutnicza w Krakowi ASY PALI IE I E II STRESZCZENIE Artykuł zawira informacj na tmat zastosowania ogniw paliwowych jako gnratorów nrgii
Ubezpieczenie w razie poważnego zachorowania. Maj 2012
 LifProtct Ubzpiczni w razi poważngo zachorowania. Maj 2012 Nasz plan ubzpiczniowy dotyczący poważnych zachorowań stanowi najbardzij komplksową ochronę tgo typu dostępną w Irlandii. Podniśliśmy jakość polisy
LifProtct Ubzpiczni w razi poważngo zachorowania. Maj 2012 Nasz plan ubzpiczniowy dotyczący poważnych zachorowań stanowi najbardzij komplksową ochronę tgo typu dostępną w Irlandii. Podniśliśmy jakość polisy
Wartość rynku odpadów komunalnych w Polsce szacowana jest na około 6-7 mld złotych
 Sminarium Brytyjsko-Polskij Izby Handlowj Gospodarowani odpadami komunalnymi Jak pobudzić publiczn i prywatn inwstycj w sktorz trmiczngo przkształcania odpadów? 13 maja 2014 r. Wartość rynku odpadów komunalnych
Sminarium Brytyjsko-Polskij Izby Handlowj Gospodarowani odpadami komunalnymi Jak pobudzić publiczn i prywatn inwstycj w sktorz trmiczngo przkształcania odpadów? 13 maja 2014 r. Wartość rynku odpadów komunalnych
PROGRAM DZIAŁAŃ W ZAKRESIE ROZWOJU SPOŁECZEŃSTWA INFORMACYJNEGO
 Część 3 Projkt z nia 26.01.2007 r. PROGRAM DZIAŁAŃ W ZAKRESIE ROZWOJU SPOŁECZEŃSTWA INFORMACYJNEGO W ramach programu ziałań w zakrsi rozwoju społczństwa informacyjngo ęą pojmowan inicjatywy, któr wzmocnią
Część 3 Projkt z nia 26.01.2007 r. PROGRAM DZIAŁAŃ W ZAKRESIE ROZWOJU SPOŁECZEŃSTWA INFORMACYJNEGO W ramach programu ziałań w zakrsi rozwoju społczństwa informacyjngo ęą pojmowan inicjatywy, któr wzmocnią
Jerzy Czesław Ossowski Katedra Ekonomii i Zarzdzania Przedsibiorstwem Wydział Zarzdzania i Ekonomii Politechnika Gdaska
 Jrzy Czsław Ossowski Kadra Ekonomii i Zarzdzania Przdsibiorswm Wydział Zarzdzania i Ekonomii Polichnika Gdaska I Sminarium Naukow Kadry Ekonomii i Zarzdzania Przdsibiorswm Polichniki Gdaskij n.: GOSPODARKA
Jrzy Czsław Ossowski Kadra Ekonomii i Zarzdzania Przdsibiorswm Wydział Zarzdzania i Ekonomii Polichnika Gdaska I Sminarium Naukow Kadry Ekonomii i Zarzdzania Przdsibiorswm Polichniki Gdaskij n.: GOSPODARKA
wydanie 3 / listopad 2015 znaków ewakuacji i ochrony przeciwpożarowej PN-EN ISO 7010 certyfikowanych pr zez C N B O P www.znaki-tdc.
 Stosowani znaków wakuacji i ochron przciwpożarowj crtfikowanch pr zz C N B O P www.znaki-tdc.com wdani 3 / listopad 2015 AA 001 Wjści wakuacjn AA 010 Drzwi wakuacjn AA 009 Drzwi wakuacjn AA E001 E001 AA
Stosowani znaków wakuacji i ochron przciwpożarowj crtfikowanch pr zz C N B O P www.znaki-tdc.com wdani 3 / listopad 2015 AA 001 Wjści wakuacjn AA 010 Drzwi wakuacjn AA 009 Drzwi wakuacjn AA E001 E001 AA
Systemy przyszłościowe. Global Navigation Satellite System Globalny System Nawigacji Satelitarnej
 Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
LABORATORIUM PODSTAWY ELEKTRONIKI Badanie Bramki X-OR
 LORTORIUM PODSTWY ELEKTRONIKI adanie ramki X-OR 1.1 Wsęp eoreyczny. ramka XOR ramka a realizuje funkcję logiczną zwaną po angielsku EXLUSIVE-OR (WYŁĄZNIE LU). Polska nazwa brzmi LO. Funkcję EX-OR zapisuje
LORTORIUM PODSTWY ELEKTRONIKI adanie ramki X-OR 1.1 Wsęp eoreyczny. ramka XOR ramka a realizuje funkcję logiczną zwaną po angielsku EXLUSIVE-OR (WYŁĄZNIE LU). Polska nazwa brzmi LO. Funkcję EX-OR zapisuje
gdzie E jest energią całkowitą cząstki. Postać równania Schrödingera dla stanu stacjonarnego Wprowadźmy do lewej i prawej strony równania Schrödingera
 San sacjonarny cząsk San sacjonarny - San, w kórym ( r, ) ( r ), gęsość prawdopodobńswa znalzna cząsk cząsk w danym obszarz przsrzn n zalży od czasu. San sacjonarny js charakrysyczny dla sacjonarngo pola
San sacjonarny cząsk San sacjonarny - San, w kórym ( r, ) ( r ), gęsość prawdopodobńswa znalzna cząsk cząsk w danym obszarz przsrzn n zalży od czasu. San sacjonarny js charakrysyczny dla sacjonarngo pola
Eksploracja danych. KLASYFIKACJA I REGRESJA cz. 1. Wojciech Waloszek. Teresa Zawadzka.
 Eksploracja danych KLASYFIKACJA I REGRESJA cz. 1 Wojciech Waloszek wowal@ei.pg.gda.pl Teresa Zawadzka egra@ei.pg.gda.pl Kaedra Inżyrii Oprogramowania Wydział Elekroniki, Telekomunikacji i Informayki Poliechnika
Eksploracja danych KLASYFIKACJA I REGRESJA cz. 1 Wojciech Waloszek wowal@ei.pg.gda.pl Teresa Zawadzka egra@ei.pg.gda.pl Kaedra Inżyrii Oprogramowania Wydział Elekroniki, Telekomunikacji i Informayki Poliechnika
13. Optyczne łącza analogowe
 TELEKOMUNIKACJA OPTOFALOWA 13. Opyczne łącza analogowe Spis reści: 13.1. Wprowadzenie 13.. Łącza analogowe z bezpośrednią modulacją mocy 13.3. Łącza analogowe z modulacją zewnęrzną 13.4. Paramery łącz
TELEKOMUNIKACJA OPTOFALOWA 13. Opyczne łącza analogowe Spis reści: 13.1. Wprowadzenie 13.. Łącza analogowe z bezpośrednią modulacją mocy 13.3. Łącza analogowe z modulacją zewnęrzną 13.4. Paramery łącz
Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu. 20 maja, 2016 R. Krenz 1
 Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu R. Krenz 1 Wstęp Celem projektu było opracowanie cyfrowego system łączności dla bezzałogowych statków latających średniego
Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu R. Krenz 1 Wstęp Celem projektu było opracowanie cyfrowego system łączności dla bezzałogowych statków latających średniego
2. STRUKTURA RADIOFONICZNYCH SYGNAŁÓW CYFROWYCH
 1. WSTĘP Radiofonię cyfrową cechują strumienie danych o dużych przepływnościach danych. Do przesyłania strumienia danych o dużych przepływnościach stosuje się transmisję z wykorzystaniem wielu sygnałów
1. WSTĘP Radiofonię cyfrową cechują strumienie danych o dużych przepływnościach danych. Do przesyłania strumienia danych o dużych przepływnościach stosuje się transmisję z wykorzystaniem wielu sygnałów
Funkcja nieciągła. Typy nieciągłości funkcji. Autorzy: Anna Barbaszewska-Wiśniowska
 Funkcja niciągła. Typy niciągłości funkcji Autorzy: Anna Barbaszwska-Wiśniowska 2018 Funkcja niciągła. Typy niciągłości funkcji Autor: Anna Barbaszwska-Wiśniowska DEFINICJA Dfinicja 1: Funkcja niciągła
Funkcja niciągła. Typy niciągłości funkcji Autorzy: Anna Barbaszwska-Wiśniowska 2018 Funkcja niciągła. Typy niciągłości funkcji Autor: Anna Barbaszwska-Wiśniowska DEFINICJA Dfinicja 1: Funkcja niciągła
Całka nieoznaczona Andrzej Musielak Str 1. Całka nieoznaczona
 Całka nieoznaczona Andrzej Musielak Sr Całka nieoznaczona Całkowanie o operacja odwrona do liczenia pochodnych, zn.: f()d = F () F () = f() Z definicji oraz z abeli pochodnych funkcji elemenarnych od razu
Całka nieoznaczona Andrzej Musielak Sr Całka nieoznaczona Całkowanie o operacja odwrona do liczenia pochodnych, zn.: f()d = F () F () = f() Z definicji oraz z abeli pochodnych funkcji elemenarnych od razu
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Wykład 5 Elementy teorii układów liniowych stacjonarnych odpowiedź na dowolne wymuszenie
 Wykład 5 Elemeny eorii układów liniowych sacjonarnych odpowiedź na dowolne wymuszenie Prowadzący: dr inż. Tomasz Sikorski Insyu Podsaw Elekroechniki i Elekroechnologii Wydział Elekryczny Poliechnika Wrocławska
Wykład 5 Elemeny eorii układów liniowych sacjonarnych odpowiedź na dowolne wymuszenie Prowadzący: dr inż. Tomasz Sikorski Insyu Podsaw Elekroechniki i Elekroechnologii Wydział Elekryczny Poliechnika Wrocławska
Temat: Weryfikacja nienaruszalności bezpieczeństwa SIL struktury sprzętowej realizującej funkcje bezpieczeństwa
 1 Lab3: Bezpieczeńswo funkcjonalne i ochrona informacji Tema: Weryfikacja nienaruszalności bezpieczeńswa SIL srukury sprzęowej realizującej funkcje bezpieczeńswa Kryeria probabilisyczne bezpieczeńswa funkcjonalnego
1 Lab3: Bezpieczeńswo funkcjonalne i ochrona informacji Tema: Weryfikacja nienaruszalności bezpieczeńswa SIL srukury sprzęowej realizującej funkcje bezpieczeńswa Kryeria probabilisyczne bezpieczeńswa funkcjonalnego
Silniki cieplne i rekurencje
 6 FOTO 33, Lao 6 Silniki cieplne i rekurencje Jakub Mielczarek Insyu Fizyki UJ Chciałbym Pańswu zaprezenować zagadnienie, kóre pozwala, rozważając emaykę sprawności układu silników cieplnych, zapoznać
6 FOTO 33, Lao 6 Silniki cieplne i rekurencje Jakub Mielczarek Insyu Fizyki UJ Chciałbym Pańswu zaprezenować zagadnienie, kóre pozwala, rozważając emaykę sprawności układu silników cieplnych, zapoznać
Różnica bilansowa dla Operatorów Systemów Dystrybucyjnych na lata (którzy dokonali z dniem 1 lipca 2007 r. rozdzielenia działalności)
") Różnica bilansowa dla Operaorów Sysemów Dysrybucyjnych na laa 2016-2020 (kórzy dokonali z dniem 1 lipca 2007 r. rozdzielenia działalności) Deparamen Rynków Energii Elekrycznej i Ciepła Warszawa 201 Spis
Różnica bilansowa dla Operaorów Sysemów Dysrybucyjnych na laa 2016-2020 (kórzy dokonali z dniem 1 lipca 2007 r. rozdzielenia działalności) Deparamen Rynków Energii Elekrycznej i Ciepła Warszawa 201 Spis
Analiza efektywności kosztowej w oparciu o wskaźnik dynamicznego kosztu jednostkowego
 TRANSFORM ADVICE PROGRAMME Invesmen in Environmenal Infrasrucure in Poland Analiza efekywności koszowej w oparciu o wskaźnik dynamicznego koszu jednoskowego dr Jana Rączkę Warszawa, 13.06.2002 2 Spis reści
TRANSFORM ADVICE PROGRAMME Invesmen in Environmenal Infrasrucure in Poland Analiza efekywności koszowej w oparciu o wskaźnik dynamicznego koszu jednoskowego dr Jana Rączkę Warszawa, 13.06.2002 2 Spis reści
Projektowanie procesu doboru próby
 Projkowai procsu doboru próby Okrśli populacji gralj i badaj Okrśli jdoski próby 3 Okrśli wykazu badaj populacji 4 Okrśli liczbości próby 5 Wybór mody doboru próby losowgo ilosowgo Usali ko lub co moż
Projkowai procsu doboru próby Okrśli populacji gralj i badaj Okrśli jdoski próby 3 Okrśli wykazu badaj populacji 4 Okrśli liczbości próby 5 Wybór mody doboru próby losowgo ilosowgo Usali ko lub co moż
Uświadomienie potrzeby badawczej.
 III. BADANIA MARKETINGOWE PROWADZENIA BADAŃ 1. W badaniach marktingowych poszukuj się odpowidzi na trzy rodzaj pytań: pytania o fakty o różnym stopniu złożoności co jst? pytania o cchy (właściwości) stwirdzanych
III. BADANIA MARKETINGOWE PROWADZENIA BADAŃ 1. W badaniach marktingowych poszukuj się odpowidzi na trzy rodzaj pytań: pytania o fakty o różnym stopniu złożoności co jst? pytania o cchy (właściwości) stwirdzanych
Równania różniczkowe. Lista nr 2. Literatura: N.M. Matwiejew, Metody całkowania równań różniczkowych zwyczajnych.
 Równania różniczkowe. Lisa nr 2. Lieraura: N.M. Mawiejew, Meody całkowania równań różniczkowych zwyczajnych. W. Krysicki, L. Włodarski, Analiza Maemayczna w Zadaniach, część II 1. Znaleźć ogólną posać
Równania różniczkowe. Lisa nr 2. Lieraura: N.M. Mawiejew, Meody całkowania równań różniczkowych zwyczajnych. W. Krysicki, L. Włodarski, Analiza Maemayczna w Zadaniach, część II 1. Znaleźć ogólną posać
1.1. Bezpośrednie transformowanie napięć przemiennych
 Rozdział Wprowadzenie.. Bezpośrednie ransformowanie napięć przemiennych Bezpośrednie ransformowanie napięć przemiennych jes formą zmiany paramerów wielkości fizycznych charakeryzujących energię elekryczną
Rozdział Wprowadzenie.. Bezpośrednie ransformowanie napięć przemiennych Bezpośrednie ransformowanie napięć przemiennych jes formą zmiany paramerów wielkości fizycznych charakeryzujących energię elekryczną
FUNKCJA NIEZAWODNOŚCI I CZAS BEZAWARYJNEJ PRACY ODPOWIADAJĄCY EKSPONENCJALNEJ INTENSYWNOŚCI USZKODZEŃ
 CZSOPISMO INŻYNIERII LĄDOWEJ, ŚRODOWISK I RCHIEKURY JOURNL OF CIVIL ENGINEERING, ENVIRONMEN ND RCHIECURE JCEE,. XXXII, z. 62 (3/I/5), lipi-wrzsiń 25, s. 3-327 Lszk OPYRCHŁ FUNKCJ NIEZWODNOŚCI I CZS EZWRYJNEJ
CZSOPISMO INŻYNIERII LĄDOWEJ, ŚRODOWISK I RCHIEKURY JOURNL OF CIVIL ENGINEERING, ENVIRONMEN ND RCHIECURE JCEE,. XXXII, z. 62 (3/I/5), lipi-wrzsiń 25, s. 3-327 Lszk OPYRCHŁ FUNKCJ NIEZWODNOŚCI I CZS EZWRYJNEJ
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Poliechnika Gdańska Wydział Elekroechniki i Auomayki Kaedra Inżynierii Sysemów Serowania Podsawy Auomayki Repeyorium z Podsaw auomayki Zadania do ćwiczeń ermin T15 Opracowanie: Kazimierz Duzinkiewicz,
Poliechnika Gdańska Wydział Elekroechniki i Auomayki Kaedra Inżynierii Sysemów Serowania Podsawy Auomayki Repeyorium z Podsaw auomayki Zadania do ćwiczeń ermin T15 Opracowanie: Kazimierz Duzinkiewicz,
REGULAMIN FUNDUSZU ROZLICZENIOWEGO
 REGULAMIN FUNDUSZU ROZLICZENIOEGO przyjęy uchwałą nr 10/60/98 Rady Nadzorczej Krajowego Depozyu Papierów arościowych S.A. z dnia 28 września 1998 r., zawierdzony decyzją Komisji Papierów arościowych i
REGULAMIN FUNDUSZU ROZLICZENIOEGO przyjęy uchwałą nr 10/60/98 Rady Nadzorczej Krajowego Depozyu Papierów arościowych S.A. z dnia 28 września 1998 r., zawierdzony decyzją Komisji Papierów arościowych i
Metoda Elementów Skończonych w Modelowaniu Układów Mechatronicznych. Układy prętowe (Scilab)
") Mtoda Elmntów Skończonych w Modlowaniu Układów Mchatronicznych Układy prętow (Scilab) str.1 I. MES 1D układy prętow. Podstawow informacj Istotą mtody lmntów skończonych jst sposób aproksymacji cząstkowych
Mtoda Elmntów Skończonych w Modlowaniu Układów Mchatronicznych Układy prętow (Scilab) str.1 I. MES 1D układy prętow. Podstawow informacj Istotą mtody lmntów skończonych jst sposób aproksymacji cząstkowych
WYBRANE METODY OCENY BEZPIECZEŃSTWA W LOTNICTWIE
 4-9 ROBLEMY EKSLOATACJI 6 Józf ŻUREK Insyu Tchniczny Wojsk Loniczych, Waszawa WYBRANE METODY OCENY BEZIECZEŃSTWA W LOTNICTWIE Słowa kluczow Bzpiczńswo, anspo loniczy, yzyko zagożń. Sszczni W aykul pzdsawiono
4-9 ROBLEMY EKSLOATACJI 6 Józf ŻUREK Insyu Tchniczny Wojsk Loniczych, Waszawa WYBRANE METODY OCENY BEZIECZEŃSTWA W LOTNICTWIE Słowa kluczow Bzpiczńswo, anspo loniczy, yzyko zagożń. Sszczni W aykul pzdsawiono
TERMOMECHANICZNY OPIS PROCESU PEŁZANIA DREWNA
 ROCZNIKI INŻYNIERII BUDOWLANEJ ZESZYT 8/8 Komisja Inżynirii Budowlanj Oddział Polskij Akadmii Nauk w Kaowicach TERMOMECHANICZNY OPIS PROCESU PEŁZANIA DREWNA Kamil PAWLIK Polichnika Opolska, Opol. Wprowadzni
ROCZNIKI INŻYNIERII BUDOWLANEJ ZESZYT 8/8 Komisja Inżynirii Budowlanj Oddział Polskij Akadmii Nauk w Kaowicach TERMOMECHANICZNY OPIS PROCESU PEŁZANIA DREWNA Kamil PAWLIK Polichnika Opolska, Opol. Wprowadzni
2. Architektury sztucznych sieci neuronowych
 - 8-2. Architktury sztucznych sici nuronowych 2.. Matmatyczny modl nuronu i prostj sici nuronowj Sztuczn sici nuronow są modlami inspirowanymi przz strukturę i zachowani prawdziwych nuronów. Podobni jak
- 8-2. Architktury sztucznych sici nuronowych 2.. Matmatyczny modl nuronu i prostj sici nuronowj Sztuczn sici nuronow są modlami inspirowanymi przz strukturę i zachowani prawdziwych nuronów. Podobni jak
System zielonych inwestycji (GIS Green Investment Scheme)
") PROGRAM PRIORYTETOWY Tyuł programu: Sysem zielonych inwesycji (GIS Green Invesmen Scheme) Część 6) SOWA Energooszczędne oświelenie uliczne. 1. Cel programu Ograniczenie lub uniknięcie emisji dwulenku węgla
PROGRAM PRIORYTETOWY Tyuł programu: Sysem zielonych inwesycji (GIS Green Invesmen Scheme) Część 6) SOWA Energooszczędne oświelenie uliczne. 1. Cel programu Ograniczenie lub uniknięcie emisji dwulenku węgla
Przykład 1 modelowania jednowymiarowego przepływu ciepła
 Przykład 1 modlowania jdnowymiarowgo przpływu cipła 1. Modl przpływu przz ścianę wilowarstwową Ściana składa się trzch warstw o różnych grubościach wykonana z różnych matriałów. Na jdnj z ścian zwnętrznych
Przykład 1 modlowania jdnowymiarowgo przpływu cipła 1. Modl przpływu przz ścianę wilowarstwową Ściana składa się trzch warstw o różnych grubościach wykonana z różnych matriałów. Na jdnj z ścian zwnętrznych
INFORMATOR TECHNICZNY
 INFRMATR TECHNICZNY YTEMY RURWE PE - WDA - KANALIZACJA P.P.H.U. MIL-pol sp. z o.o. 42-0 Częstochowa ul. partańska 8/10 http://www.milo-pol.pl, -mail: milo@milo-pol.pl tl./fax +48 34 362 72 11, 362 83 12
INFRMATR TECHNICZNY YTEMY RURWE PE - WDA - KANALIZACJA P.P.H.U. MIL-pol sp. z o.o. 42-0 Częstochowa ul. partańska 8/10 http://www.milo-pol.pl, -mail: milo@milo-pol.pl tl./fax +48 34 362 72 11, 362 83 12
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
DYNAMICZNE MODELE EKONOMETRYCZNE
 DYNAMICZNE MODELE EKONOMETRYCZNE X Ogólnopolskie Seminarium Naukowe, 4 6 września 2007 w Toruniu Kaedra Ekonomerii i Saysyki, Uniwersye Mikołaja Kopernika w Toruniu Uniwersye Gdański Zasosowanie modelu
DYNAMICZNE MODELE EKONOMETRYCZNE X Ogólnopolskie Seminarium Naukowe, 4 6 września 2007 w Toruniu Kaedra Ekonomerii i Saysyki, Uniwersye Mikołaja Kopernika w Toruniu Uniwersye Gdański Zasosowanie modelu
Kluczowe wnioski ze Światowego Badania Bezpieczeństwa Informacji 2012. 4 grudnia 2012
 Kluczowe wnioski ze Świaowego Badania Bezpieczeńswa Informacji 2012 4 grudnia 2012 Erns & Young 2012 Świaowe Badanie Bezpieczeńswa Informacji Świaowe Badanie Bezpieczeńswa Informacji Erns & Young 2012
Kluczowe wnioski ze Świaowego Badania Bezpieczeńswa Informacji 2012 4 grudnia 2012 Erns & Young 2012 Świaowe Badanie Bezpieczeńswa Informacji Świaowe Badanie Bezpieczeńswa Informacji Erns & Young 2012
Wskazówki projektowe do obliczania nośności i maksymalnego zanurzenia statku rybackiego na wstępnym etapie projektowania
 CEPOWSKI omasz 1 Wskazówki projekowe do obliczania nośności i maksymalnego zanurzenia saku rybackiego na wsępnym eapie projekowania WSĘP Celem podjęych badań było opracowanie wskazówek projekowych do wyznaczania
CEPOWSKI omasz 1 Wskazówki projekowe do obliczania nośności i maksymalnego zanurzenia saku rybackiego na wsępnym eapie projekowania WSĘP Celem podjęych badań było opracowanie wskazówek projekowych do wyznaczania
Sygnały, ich klasyfikacja, parametry, widma
 ndrz Lśnici Synały, ich lasyfiaca, paramry, widma / Synały, ich lasyfiaca, paramry, widma ndrz Lśnici, PG Kadra Sysmów Mulimdialnych, Gdańs. Poęci synału W współczsnych społczńswach w obiu znadu się oromna
ndrz Lśnici Synały, ich lasyfiaca, paramry, widma / Synały, ich lasyfiaca, paramry, widma ndrz Lśnici, PG Kadra Sysmów Mulimdialnych, Gdańs. Poęci synału W współczsnych społczńswach w obiu znadu się oromna
Szeregi Fouriera. Powyższe współczynniki można wyznaczyć analitycznie z następujących zależności:
 Trygonomeryczny szereg Fouriera Szeregi Fouriera Każdy okresowy sygnał x() o pulsacji podsawowej ω, spełniający warunki Dirichlea:. całkowalny w okresie: gdzie T jes okresem funkcji x(), 2. posiadający
Trygonomeryczny szereg Fouriera Szeregi Fouriera Każdy okresowy sygnał x() o pulsacji podsawowej ω, spełniający warunki Dirichlea:. całkowalny w okresie: gdzie T jes okresem funkcji x(), 2. posiadający
ZASTOSOWANIE METODY GRAFÓW WIĄZAŃ DO MODELOWANIA PRACY ZESPOŁU PRĄDOTWÓRCZEGO W SIŁOWNI OKRĘTOWEJ
 Chybowski L. Grzbiniak R. Matuszak Z. Maritim Acadmy zczcin Poland ZATOOWANIE METODY GRAFÓW WIĄZAŃ DO MODELOWANIA PRACY ZEPOŁU PRĄDOTWÓRCZEGO W IŁOWNI OKRĘTOWEJ ummary: Papr prsnts issus of application
Chybowski L. Grzbiniak R. Matuszak Z. Maritim Acadmy zczcin Poland ZATOOWANIE METODY GRAFÓW WIĄZAŃ DO MODELOWANIA PRACY ZEPOŁU PRĄDOTWÓRCZEGO W IŁOWNI OKRĘTOWEJ ummary: Papr prsnts issus of application
Układy sekwencyjne asynchroniczne Zadania projektowe
 Układy sekwencyjne asynchroniczne Zadania projekowe Zadanie Zaprojekować układ dwusopniowej sygnalizacji opycznej informującej operaora procesu o przekroczeniu przez konrolowany paramer warości granicznej.
Układy sekwencyjne asynchroniczne Zadania projekowe Zadanie Zaprojekować układ dwusopniowej sygnalizacji opycznej informującej operaora procesu o przekroczeniu przez konrolowany paramer warości granicznej.
O pewnym algorytmie rozwiązującym problem optymalnej alokacji zasobów. Cezary S. Zaremba*, Leszek S. Zaremba ** WPROWADZENIE
 O pewnym algorymie rozwiązującym problem opymalnej alokacji zasobów Cezary S. Zaremba*, Leszek S. Zaremba ** WPROWADZENIE W kierowaniu firmą Zarząd częso saje wobec problemu rozdysponowania (alokacji)
O pewnym algorymie rozwiązującym problem opymalnej alokacji zasobów Cezary S. Zaremba*, Leszek S. Zaremba ** WPROWADZENIE W kierowaniu firmą Zarząd częso saje wobec problemu rozdysponowania (alokacji)
Wyznaczanie temperatury i wysokości podstawy chmur
 Wyznaczanie emperaury i wysokości podsawy chmur Czas rwania: 10 minu Czas obserwacji: dowolny Wymagane warunki meeorologiczne: pochmurnie lub umiarkowane zachmurzenie Częsoliwość wykonania: 1 raz w ciągu
Wyznaczanie emperaury i wysokości podsawy chmur Czas rwania: 10 minu Czas obserwacji: dowolny Wymagane warunki meeorologiczne: pochmurnie lub umiarkowane zachmurzenie Częsoliwość wykonania: 1 raz w ciągu