Szybkie prototypowanie w projektowaniu mechatronicznym
|
|
|
- Wojciech Dziedzic
- 6 lat temu
- Przeglądów:
Transkrypt

1 Szybkie prototypowanie w projektowaniu mechatronicznym
 są to dedykowane architektury komputerowe, które są")

2 Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią całego urządzenia. Rozwiązanie w oparciu o systemy wbudowane zwiększa szybkość i niezawodność, zmniejsza zużycie energii i podnosi bezpieczeństwo pracy.

3 Systemy wbudowane (Embedded Systems) Systemy wbudowane są stosowane: w przemyśle samochodowym (ABS, ESP, komputer pokładowy), w przemyśle obronnym (sterowanie w samolotach, rakietach), w przemyśle maszynowym, np. PLC, jako sterowniki robotów mechanicznych, sprzęt komputerowy drukarki, plotery, routery, w sterownikach bankomatów, czy też innych urządzeń codziennego użytku (odtwarzacze dvd, aparaty fotograficzne, kina domowe, telewizory, telefony komórkowe, kamery, ).

4 Systemy wbudowane (Embedded Systems) Systemy mechatroniczne wykorzystują zaawansowane mikroprocesory sterujące złożonymi procesami, w których zależności między sprzętem a oprogramowaniem są bardzo złożone. Stanowi to duże wyzwanie projektowe należy pogodzić wymagania aplikacji z ograniczeniami sprzętowo-programowymi, na jakie można napotkać. Proces projektowania długi, złożony, wieloetapowy: - określenie wymagań, - projektowanie hardware, - projektowanie software, - testowanie, - wdrożenie do produkcji.

")
 Tradycyjne podejście -")

5 Klasyczne projektowanie Dokumenty tekstowe (utrudniony przepływ informacji, często pojawiają się błędy związane z niekompletną, błędną specyfikacją ) Projekt i budowa prototypu (kosztowne) Tworzenie, kodowanie algorytmów (Różne narzędzia wiele błędów ludzkich) Testowanie na obiekcie rzeczywistym (im później znaleziony błąd tym trudniejszy i kosztowniejszy do usunięcia) Tradycyjne podejście - procedura długa, kosztowna, terminy nie dotrzymywane, wiele błędów, potrzebne poprawki. Często wynikowa aplikacja nie jest zgodna z początkowymi założeniami projektu.
")




6 Projektowanie w oparciu o modele (Model-Based design) Projektowanie z użyciem modeli ułatwia rozwijanie systemów mechatronicznych przez opracowanie i wykorzystywanie jednego spójnego środowiska do projektowania i łączenia elementów mechanicznych, elektronicznych, pneumatycznych, termicznych itp.
7 Projektowanie w oparciu o modele (Model-Based Design) Charakterystyka MBD: - podejście programowe, - łatwość porównywania różnych systemów i koncepcji, - brak kosztów budowania stanowisk pomiarowych i fizycznych prototypów, - efektywniejsze metody weryfikacji i testowania, - automatyczna generacja kodu źródłowego dla sprzętu, - krótszy czas realizacji projektu, - mniejsza liczba błędów, - możliwość pracy grupowej, - mniejsze koszty realizacji projektu.
 - modelu układu sterowania")
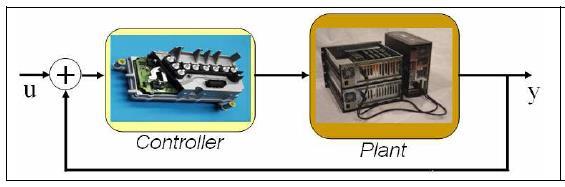
8 Projektowanie w oparciu o modele (Model-Based Design) Model systemu zbudowany jest z: - modelu obiektu (Plant) - modelu układu sterowania (Controller)

9 Budowa modelu układu sterowania (Model-Based Design) Modeluje się go najczęściej systemie w służącym do modelowania, symulacji i analizowania układów dynamicznych takich jak Simulink (Matlab) czy Easy5. 1. Model układu sterowania projektuje się w postaci diagramu blokowego. 2. Model posiada: Wejścia - sygnały dostarczane przez zewnętrzne wymuszenia, Wyjścia sygnały pokazujące reakcję modelu. 3. Wejścia i wyjścia reprezentowane są przez rzeczywiste wartości jak np. napięcie, temperatura, ph, ciśnienie, siła, położenie, prędkość, itp. 4. Wewnątrz modelu, bloki połączone są liniami, które odwzorowują matematyczne relacje pomiędzy nimi (a ściślej przepływ informacji pomiędzy elementami modelu).


10 Budowa modelu obiektu (Model-Based Design) Model obiektu tworzy się w postaci: modelu matematycznego formułuje się jawne równania matematyczne opisujące działanie układu. Matematyczny model może być prosty np. model silnika - równania opisujące zamianę napięcia na moment obrotowy lub złożony np. manipulator - równania opisujące zamianę momentów napędowych na przemieszczenia efektora.

11 Budowa modelu obiektu (Model-Based Design) uproszczony model matematyczny (Data-Driven Modeling ). Wejście Obiekt Wyjście Kiedy opis matematyczny systemu staje się zbyt trudny lub czasochłonny do opracowania, stosuje się podejście wykorzystujące dane empiryczne z obiektu rzeczywistego (Data-Driven Modeling), w myśl którego mając dane wejściowe i wyjściowe jesteśmy w stanie stworzyć przybliżony model matematyczny systemu. Podejście to nie daje jednak wglądu w fizykę systemu, ale daje dokładną reprezentację rzeczywistego systemu w określonym zakresie danych testowych. Wyjście = f(wejście)
12 Budowa modelu obiektu (Model-Based Design) wirtualny model symulacyjny w systemach analizy dynamicznej układów wieloczłonowych (MD.Adams, LMS Dads, SIMECHANICS, )
 Projektowanie w")
13 Projektowanie w oparciu o modele (Model-Based Design) Projektowanie w środowisku MD.Adams:

14 Projektowanie w oparciu o modele (Model-Based Design) Projektowanie w środowisku Matlab Simulink oraz Simechanics, RTW
15 Projektowanie w oparciu o modele (Model-Based Design) Projektowanie w środowisku MD.Adams (obiekt) Matlab Simulink (układ sterowania) oraz RTW (generowania kodu źródłowego dla sprzętu)
16 Testowanie i weryfikacja systemu Testowanie systemu może być realizowane na dwa sposoby: Rapid Control Prototyping, (RCP) szybkie prototypowanie układów sterowania, Symulacje - Hardware in the loop (HIL).

17 Rapid control prototyping szybkie prototypowanie

18 Rapid control prototyping szybkie prototypowanie Podczas szybkiego prototypowania (Rapid Control Prototyping): kod algorytmu sterującego generowany jest na specjalizowany komputer, który działa na systemie czasu rzeczywistego na którym uruchomiony jest programowy model układu sterowania i jest podłączony do istniejącego sprzętu. System sterowania w modelu zawiera wszystkie potrzebne wejścia/wyjścia, wygenerowany kod zarządza wszystkimi tymi urządzeniami i inżynier nie musi ich samodzielnie programować. Dzięki szybkiemu prototypowaniu wszystkie koncepcje można efektywnie i szybko przetestować w warunkach rzeczywistych.

19 Symulacje - Hardware in the loop (HIL)

20 Symulacje - Hardware in the loop (HIL) Każda modyfikacja regulatora (parametrów, struktury) niesie ze sobą niebezpieczeństwo uszkodzenia urządzenia (plant) sterowanego podczas prac uruchomieniowych. Dlatego też w symulacjach HIL odpowiednio przygotowana aplikacja uruchamiana na komputerze z systemem czasu rzeczywistego pełni rolę symulowanego modelu sterowanego urządzenia. Dzięki temu możliwe jest (bez niebezpieczeństwa uszkodzenia elementów rzeczywistego procesu) przetestowanie rozmaitych koncepcji systemów sterowania (regulatorów).

21 Symulacje - Hardware in the loop (HIL)
22
Systemy Czasu Rzeczywistego (SCR)
") SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 5: Modele projektowania systemu sterowania, idea szybkiego prototypowania układu sterowania RPC oraz symulacji w pętli sprzętowej HIL wprowadzenie WYDZIAŁ
SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 5: Modele projektowania systemu sterowania, idea szybkiego prototypowania układu sterowania RPC oraz symulacji w pętli sprzętowej HIL wprowadzenie WYDZIAŁ
Projektowanie bazujące na modelach
 Projektowanie mechatroniczne. Projektowanie bazujące na modelach Krzysztof Pietrusewicz 1. Wprowadzenie W artykule niniejszym przedstawiono problematykę realizacji innowacyjnych prac nad systemami sterowania
Projektowanie mechatroniczne. Projektowanie bazujące na modelach Krzysztof Pietrusewicz 1. Wprowadzenie W artykule niniejszym przedstawiono problematykę realizacji innowacyjnych prac nad systemami sterowania
Mechatronika i szybkie prototypowanie układów sterowania
 Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Stanisław SZABŁOWSKI
 Dydaktyka Informatyki 12(2017) ISSN 2083-3156 DOI: 10.15584/di.2017.12.26 http://www.di.univ.rzeszow.pl Wydział Matematyczno-Przyrodniczy UR Laboratorium Zagadnień Społeczeństwa Informacyjnego Stanisław
Dydaktyka Informatyki 12(2017) ISSN 2083-3156 DOI: 10.15584/di.2017.12.26 http://www.di.univ.rzeszow.pl Wydział Matematyczno-Przyrodniczy UR Laboratorium Zagadnień Społeczeństwa Informacyjnego Stanisław
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
Autoreferat Rozprawy Doktorskiej
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Autoreferat Rozprawy Doktorskiej Krzysztof Kogut Real-time control
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Autoreferat Rozprawy Doktorskiej Krzysztof Kogut Real-time control
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
Analiza i projektowanie oprogramowania. Analiza i projektowanie oprogramowania 1/32
 Analiza i projektowanie oprogramowania Analiza i projektowanie oprogramowania 1/32 Analiza i projektowanie oprogramowania 2/32 Cel analizy Celem fazy określania wymagań jest udzielenie odpowiedzi na pytanie:
Analiza i projektowanie oprogramowania Analiza i projektowanie oprogramowania 1/32 Analiza i projektowanie oprogramowania 2/32 Cel analizy Celem fazy określania wymagań jest udzielenie odpowiedzi na pytanie:
Spis treúci. 1. Wprowadzenie... 13
 Księgarnia PWN: W. Dąbrowski, A. Stasiak, M. Wolski - Modelowanie systemów informatycznych w języku UML 2.1 Spis treúci 1. Wprowadzenie... 13 2. Modelowanie cele i metody... 15 2.1. Przegląd rozdziału...
Księgarnia PWN: W. Dąbrowski, A. Stasiak, M. Wolski - Modelowanie systemów informatycznych w języku UML 2.1 Spis treúci 1. Wprowadzenie... 13 2. Modelowanie cele i metody... 15 2.1. Przegląd rozdziału...
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
Systemy wbudowane. Paweł Pełczyński ppelczynski@swspiz.pl
 Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Systemy Czasu Rzeczywistego (SCR)
") SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 6: Szybkie prototypowanie układu sterowania RPC oraz symulacji w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink
SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 6: Szybkie prototypowanie układu sterowania RPC oraz symulacji w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
1 Spotkanie Użytkowników Systemów B&R, 9 10 października Hotel Ossa Congress & SPA, Ossa, Rawa Mazowiecka - -
 1 Spotkanie Użytkowników Systemów B&R, 9 10 października 2013 Hotel Ossa Congress & SPA, Ossa, 96200 Rawa Mazowiecka 2 Spotkanie Użytkowników Systemów B&R, 9 10 października 2013 Zaprezentujemy szereg
1 Spotkanie Użytkowników Systemów B&R, 9 10 października 2013 Hotel Ossa Congress & SPA, Ossa, 96200 Rawa Mazowiecka 2 Spotkanie Użytkowników Systemów B&R, 9 10 października 2013 Zaprezentujemy szereg
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Idea szybkiego prototypowania układu sterowania RPC oraz symulacja w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink Politechnika
Systemy Czasu Rzeczywistego (SCR) Idea szybkiego prototypowania układu sterowania RPC oraz symulacja w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink Politechnika
Katedra Optoelektroniki i Systemów Elektronicznych. Profil dyplomowania i Specjalność Komputerowe Systemy Elektroniczne
 Katedra Optoelektroniki i Systemów Elektronicznych Profil dyplomowania i Specjalność Komputerowe Systemy Elektroniczne Przybyłem, zobaczyłem, zmierzyłem... Komputerowe Systemy Elektroniczne Absolwent profilu/specjalności
Katedra Optoelektroniki i Systemów Elektronicznych Profil dyplomowania i Specjalność Komputerowe Systemy Elektroniczne Przybyłem, zobaczyłem, zmierzyłem... Komputerowe Systemy Elektroniczne Absolwent profilu/specjalności
NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH STANOWISKA TECHNODYDAKTYCZNE
 2. OGÓLNOPOLSKI KONGRES EDUKACJI POZAFORMALNEJ NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT BADAWCZY w Radomiu
2. OGÓLNOPOLSKI KONGRES EDUKACJI POZAFORMALNEJ NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT BADAWCZY w Radomiu
METODY ZINTEGROWANEGO PROJEKTOWANIA SPRZĘTU I OPROGRAMOWANIA Z WYKORZYSTANIEM NOWOCZESNYCH UKŁADÓW PROGRAMOWALNYCH
 METODY ZINTEGROWANEGO PROJEKTOWANIA SPRZĘTU I OPROGRAMOWANIA Z WYKORZYSTANIEM NOWOCZESNYCH UKŁADÓW PROGRAMOWALNYCH Arkadiusz Bukowiec mgr inż. Agnieszka Węgrzyn Instytut Informatyki i Elektroniki, Uniwersytet
METODY ZINTEGROWANEGO PROJEKTOWANIA SPRZĘTU I OPROGRAMOWANIA Z WYKORZYSTANIEM NOWOCZESNYCH UKŁADÓW PROGRAMOWALNYCH Arkadiusz Bukowiec mgr inż. Agnieszka Węgrzyn Instytut Informatyki i Elektroniki, Uniwersytet
Systemy Wbudowane. Założenia i cele przedmiotu: Określenie przedmiotów wprowadzających wraz z wymaganiami wstępnymi: Opis form zajęć
 Systemy Wbudowane Kod przedmiotu: SW Rodzaj przedmiotu: kierunkowy ; obowiązkowy Wydział: Informatyki Kierunek: Informatyka Specjalność (specjalizacja): - Poziom studiów: pierwszego stopnia Profil studiów:
Systemy Wbudowane Kod przedmiotu: SW Rodzaj przedmiotu: kierunkowy ; obowiązkowy Wydział: Informatyki Kierunek: Informatyka Specjalność (specjalizacja): - Poziom studiów: pierwszego stopnia Profil studiów:
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
PROGRAM KSZTAŁCENIA dla kierunku automatyka i robotyka studiów pierwszego stopnia o profilu ogólnoakademickim
 PROGRAM KSZTAŁCENIA dla kierunku automatyka i robotyka studiów pierwszego stopnia o profilu ogólnoakademickim Program kształcenia dla określonego kierunku, poziomu studiów i profilu kształcenia obejmuje
PROGRAM KSZTAŁCENIA dla kierunku automatyka i robotyka studiów pierwszego stopnia o profilu ogólnoakademickim Program kształcenia dla określonego kierunku, poziomu studiów i profilu kształcenia obejmuje
NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH STANOWISKA TECHNODYDAKTYCZNE
 SESJA TEMATYCZNA I Innowacyjne rozwiązania wspomagające rozwój oraz uznawanie kompetencji zawodowych NOWOCZESNE METODY MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT
SESJA TEMATYCZNA I Innowacyjne rozwiązania wspomagające rozwój oraz uznawanie kompetencji zawodowych NOWOCZESNE METODY MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT
2.2 Opis części programowej
 2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES
 RYSZARD DINDORF, PAWEŁ ŁASKI, JAKUB TAKOSHOGLU, PIOTR WOŚ ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES S
RYSZARD DINDORF, PAWEŁ ŁASKI, JAKUB TAKOSHOGLU, PIOTR WOŚ ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES S
Specjalność: Komputerowe systemy sterowania i diagnostyki
 Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Metodyka projektowania komputerowych systemów sterowania
 Metodyka projektowania komputerowych systemów sterowania Andrzej URBANIAK Metodyka projektowania KSS (1) 1 Projektowanie KSS Analiza wymagań Opracowanie sprzętu Projektowanie systemu Opracowanie oprogramowania
Metodyka projektowania komputerowych systemów sterowania Andrzej URBANIAK Metodyka projektowania KSS (1) 1 Projektowanie KSS Analiza wymagań Opracowanie sprzętu Projektowanie systemu Opracowanie oprogramowania
Etapy życia oprogramowania
 Modele cyklu życia projektu informatycznego Organizacja i Zarządzanie Projektem Informatycznym Jarosław Francik marzec 23 w prezentacji wykorzystano również materiały przygotowane przez Michała Kolano
Modele cyklu życia projektu informatycznego Organizacja i Zarządzanie Projektem Informatycznym Jarosław Francik marzec 23 w prezentacji wykorzystano również materiały przygotowane przez Michała Kolano
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania, Sieci komputerowe Rodzaj zajęć: wykład, laboratorium MODELOWANIE I SYMULACJA Modelling
Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania, Sieci komputerowe Rodzaj zajęć: wykład, laboratorium MODELOWANIE I SYMULACJA Modelling
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
UKŁAD AUTOMATYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU STAŁEGO KONFIGUROWANY GRAFICZNIE
 UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
MODELE I MODELOWANIE
 MODELE I MODELOWANIE Model układ materialny (np. makieta) lub układ abstrakcyjny (np..rysunki, opisy słowne, równania matematyczne). Model fizyczny (nominalny) opis procesów w obiekcie (fizycznych, również
MODELE I MODELOWANIE Model układ materialny (np. makieta) lub układ abstrakcyjny (np..rysunki, opisy słowne, równania matematyczne). Model fizyczny (nominalny) opis procesów w obiekcie (fizycznych, również
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Etapy życia oprogramowania. Modele cyklu życia projektu. Etapy życia oprogramowania. Etapy życia oprogramowania
 Etapy życia oprogramowania Modele cyklu życia projektu informatycznego Organizacja i Zarządzanie Projektem Informatycznym Jarosław Francik marzec 23 Określenie wymagań Testowanie Pielęgnacja Faza strategiczna
Etapy życia oprogramowania Modele cyklu życia projektu informatycznego Organizacja i Zarządzanie Projektem Informatycznym Jarosław Francik marzec 23 Określenie wymagań Testowanie Pielęgnacja Faza strategiczna
Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego
 Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego Dziś bardziej niż kiedykolwiek narzędzia używane przez
Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego Dziś bardziej niż kiedykolwiek narzędzia używane przez
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń
 Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń inż. Paweł Stęczniewski Promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 22.11.2017 inż.
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń inż. Paweł Stęczniewski Promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 22.11.2017 inż.
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: NAPĘDY I STEROWANIE PNEUMATYCZNE MASZYN PNEUMATIC DRIVE AND CONTROL OF MACHINES Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: PROJEKTOWANIE SYSTEMÓW MECHANICZNYCH
Nazwa przedmiotu: NAPĘDY I STEROWANIE PNEUMATYCZNE MASZYN PNEUMATIC DRIVE AND CONTROL OF MACHINES Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: PROJEKTOWANIE SYSTEMÓW MECHANICZNYCH
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: projektowanie systemów mechanicznych Rodzaj zajęd: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU Symulacje
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: projektowanie systemów mechanicznych Rodzaj zajęd: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU Symulacje
Technika mikroprocesorowa. Struktura programu użytkownika w systemie mikroprocesorowym
 Struktura programu użytkownika w systemie mikroprocesorowym start inicjalizacja niekończaca się pętla zadania niekrytyczne czasowo przerwania zadania krytyczne czasowo 1 Znaczenie problematyki programowania
Struktura programu użytkownika w systemie mikroprocesorowym start inicjalizacja niekończaca się pętla zadania niekrytyczne czasowo przerwania zadania krytyczne czasowo 1 Znaczenie problematyki programowania
Simulink MATLAB Przegląd obiektów i przykłady zastosowań
 Simulink MATLAB Przegląd obiektów i przykłady zastosowań M. Berndt-Schreiber 1 Simulink MATLAB SIMULINK jest rozszerzeniem pakietu MATLAB; przy pomocy graficznego środowiska pozwala konstruować diagramy
Simulink MATLAB Przegląd obiektów i przykłady zastosowań M. Berndt-Schreiber 1 Simulink MATLAB SIMULINK jest rozszerzeniem pakietu MATLAB; przy pomocy graficznego środowiska pozwala konstruować diagramy
Projektowanie Graficznych Interfejsów Użytkownika Robert Szmurło
 Projektowanie Graficznych Interfejsów Użytkownika Robert Szmurło LATO 2007 Projektowanie Graficznych Interfejsów Użytkownika 1 UCD - User Centered Design 1) User Centered Design Projekt Skoncentrowany
Projektowanie Graficznych Interfejsów Użytkownika Robert Szmurło LATO 2007 Projektowanie Graficznych Interfejsów Użytkownika 1 UCD - User Centered Design 1) User Centered Design Projekt Skoncentrowany
Technologie informacyjne - wykład 12 -
 Zakład Fizyki Budowli i Komputerowych Metod Projektowania Instytut Budownictwa Wydział Budownictwa Lądowego i Wodnego Politechnika Wrocławska Technologie informacyjne - wykład 12 - Prowadzący: Dmochowski
Zakład Fizyki Budowli i Komputerowych Metod Projektowania Instytut Budownictwa Wydział Budownictwa Lądowego i Wodnego Politechnika Wrocławska Technologie informacyjne - wykład 12 - Prowadzący: Dmochowski
Automatyka i Robotyka studia stacjonarne drugiego stopnia
 #384 #380 dr inż. Mirosław Gajer Projekt i implementacja narzędzia do profilowania kodu natywnego przy wykorzystaniu narzędzi Android NDK (Project and implementation of tools for profiling native code
#384 #380 dr inż. Mirosław Gajer Projekt i implementacja narzędzia do profilowania kodu natywnego przy wykorzystaniu narzędzi Android NDK (Project and implementation of tools for profiling native code
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
Laboratorium demonstrator bazowych technologii Przemysłu 4.0 przykład projektu utworzenia laboratorium przez KSSE i Politechnikę Śląską
 Laboratorium demonstrator bazowych technologii Przemysłu 4.0 przykład projektu utworzenia laboratorium przez KSSE i Politechnikę Śląską (wynik prac grupy roboczej ds. kształcenia, kompetencji i zasobów
Laboratorium demonstrator bazowych technologii Przemysłu 4.0 przykład projektu utworzenia laboratorium przez KSSE i Politechnikę Śląską (wynik prac grupy roboczej ds. kształcenia, kompetencji i zasobów
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA, Rodzaj zajęć: wykład, laboratorium UKŁADY STEROWANIA Control systems Forma studiów: stacjonarne
Nazwa przedmiotu: Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA, Rodzaj zajęć: wykład, laboratorium UKŁADY STEROWANIA Control systems Forma studiów: stacjonarne
RAPORT. Gryfów Śląski
 RAPORT z realizacji projektu Opracowanie i rozwój systemu transportu fluidalnego w obróbce horyzontalnej elementów do układów fotogalwanicznych w zakresie zadań Projekt modelu systemu Projekt automatyki
RAPORT z realizacji projektu Opracowanie i rozwój systemu transportu fluidalnego w obróbce horyzontalnej elementów do układów fotogalwanicznych w zakresie zadań Projekt modelu systemu Projekt automatyki
Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania
 1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
Modelowanie jako sposób opisu rzeczywistości. Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka
 Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
LEGO Segway. Budowa i analiza strukturalnie niestabilnego robota mobilnego na bazie projektu Segway
 LEGO Segway Budowa i analiza strukturalnie niestabilnego robota mobilnego na bazie projektu Segway Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Kraków, 29.05.2009 Projekt LEGO Segway
LEGO Segway Budowa i analiza strukturalnie niestabilnego robota mobilnego na bazie projektu Segway Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Kraków, 29.05.2009 Projekt LEGO Segway
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Literatura Ryszard Pełka: Mikrokontrolery - architektura, programowanie, zastosowania Projektowanie
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Literatura Ryszard Pełka: Mikrokontrolery - architektura, programowanie, zastosowania Projektowanie
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Laboratorium Sterowania Robotów Sprawozdanie
 Instytut Automatyki Politechniki Łódzkiej FTIMS, Informatyka wtorek 10:15 12:00 Laboratorium Sterowania Robotów Sprawozdanie Skład grupy laboratoryjnej: Krzysztof Łosiewski 127260 Łukasz Nowak 127279 Kacper
Instytut Automatyki Politechniki Łódzkiej FTIMS, Informatyka wtorek 10:15 12:00 Laboratorium Sterowania Robotów Sprawozdanie Skład grupy laboratoryjnej: Krzysztof Łosiewski 127260 Łukasz Nowak 127279 Kacper
KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK
 Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
UML cz. III. UML cz. III 1/36
 UML cz. III UML cz. III 1/36 UML cz. III 2/36 Diagram współpracy Diagramy współpracy: prezentują obiekty współdziałające ze sobą opisują rolę obiektów w scenariuszu mogą prezentować wzorce projektowe UML
UML cz. III UML cz. III 1/36 UML cz. III 2/36 Diagram współpracy Diagramy współpracy: prezentują obiekty współdziałające ze sobą opisują rolę obiektów w scenariuszu mogą prezentować wzorce projektowe UML
Tematy magisterskie: Lp. Sugerowany stopień, kierunek studiów oraz specjalność Elektrotechnika Magisterska Dr hab. inż.
 Katedra Automatyki i Elektroniki Wydział Elektryczny Zgodnie z procedurą dyplomowania na Wydziale, poniżej przedstawiono tematy prac dyplomowych dla studentów Elektrotechnika oraz Telekomunikacja kończących
Katedra Automatyki i Elektroniki Wydział Elektryczny Zgodnie z procedurą dyplomowania na Wydziale, poniżej przedstawiono tematy prac dyplomowych dla studentów Elektrotechnika oraz Telekomunikacja kończących
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
Specjalność: Komputerowe systemy sterowania i diagnostyki. Strona 1 z 5
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Projektowanie układów nadzoru systemu mechatronicznego (SCADA) Project of Supervisory Control for Mechatronic Systems Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności:
Nazwa przedmiotu: Projektowanie układów nadzoru systemu mechatronicznego (SCADA) Project of Supervisory Control for Mechatronic Systems Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności:
3/13/2012. Automatyka i Sterowanie PRz Wprowadzenie. Wprowadzenie. Historia automatyki. dr inż. Tomasz Żabiński. Odśrodkowy regulator prędkości
 Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
Oprogramowanie komputerowych systemów sterowania
 Budowa i oprogramowanie komputerowych systemów sterowania Wykład 3 Oprogramowanie komputerowych systemów sterowania Wprowadzenie W komputerowych systemach automatyki wyróżnia się dwa ściśle z sobą powiązane
Budowa i oprogramowanie komputerowych systemów sterowania Wykład 3 Oprogramowanie komputerowych systemów sterowania Wprowadzenie W komputerowych systemach automatyki wyróżnia się dwa ściśle z sobą powiązane
Programowanie Układów Logicznych kod kursu: ETD6203. Szczegóły realizacji projektu indywidualnego W dr inż.
 Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Lista zadań nr 5. Ścieżka projektowa Realizacja każdego z zadań odbywać się będzie zgodnie z poniższą ścieżką projektową (rys.
 Sterowanie procesami dyskretnymi laboratorium dr inż. Grzegorz Bazydło G.Bazydlo@iee.uz.zgora.pl, staff.uz.zgora.pl/gbazydlo Lista zadań nr 5 Zagadnienia stosowanie skończonych automatów stanów (ang. Finite
Sterowanie procesami dyskretnymi laboratorium dr inż. Grzegorz Bazydło G.Bazydlo@iee.uz.zgora.pl, staff.uz.zgora.pl/gbazydlo Lista zadań nr 5 Zagadnienia stosowanie skończonych automatów stanów (ang. Finite
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
2012/2013. PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki
 PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki rok akademicki 2012/2013 Opole, styczeń 2013 r. Tekst jednolity po zmianach
PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki rok akademicki 2012/2013 Opole, styczeń 2013 r. Tekst jednolity po zmianach
Systemy czasu rzeczywistego wstęp
 J. Ułasiewicz Komputerowe systemy sterowania 1 1 Systemy wbudowane Często system sterujący stanowi integralną część urządzenia. Jest to system wbudowany. Nie posiada on żadnych elementów pozwalających
J. Ułasiewicz Komputerowe systemy sterowania 1 1 Systemy wbudowane Często system sterujący stanowi integralną część urządzenia. Jest to system wbudowany. Nie posiada on żadnych elementów pozwalających
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy:
Instrukcja obsługi SPEED CONTROL. Electro-pneumatic Speed control system Elektropneumatyczny Regulator Wydajności Pompy
 SPEED CONTROL Electro-pneumatic Speed control system Elektropneumatyczny Regulator Wydajności Pompy Informacje ogólne Sterownik Warren Rupp SPEED CONTROL może być stosowany do sterowania wydajnością pomp
SPEED CONTROL Electro-pneumatic Speed control system Elektropneumatyczny Regulator Wydajności Pompy Informacje ogólne Sterownik Warren Rupp SPEED CONTROL może być stosowany do sterowania wydajnością pomp
LEKCJA TEMAT: Zasada działania komputera.
 LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Laboratorium Komputerowe Systemy Pomiarowe
 Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Programowanie wielofunkcyjnej karty pomiarowej w VEE Data wykonania: 15.05.08 Data oddania: 29.05.08 Celem ćwiczenia była
Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Programowanie wielofunkcyjnej karty pomiarowej w VEE Data wykonania: 15.05.08 Data oddania: 29.05.08 Celem ćwiczenia była
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Nowe stanowiska techniczno-dydaktyczne dla potrzeb edukacji mechatronicznej
 Witold Morawski FESTO DIDACTIC Nowe stanowiska techniczno-dydaktyczne dla potrzeb edukacji mechatronicznej Firma Festo Dział Dydaktyki oferuje placówkom dydaktycznym specjalistyczny sprzęt i oprogramowanie
Witold Morawski FESTO DIDACTIC Nowe stanowiska techniczno-dydaktyczne dla potrzeb edukacji mechatronicznej Firma Festo Dział Dydaktyki oferuje placówkom dydaktycznym specjalistyczny sprzęt i oprogramowanie
Kierunkowy efekt kształcenia opis
 I. EFEKTY KSZTAŁCENIA DLA KIERUNKU AUTOMATYKA I ROBOTYKA T- obszar kształcenia w zakresie nauk technicznych 1-Studia pierwszego stopnia A- Profil ogólnoakademicki W- kategoria wiedzy U Kategoria umiejętności
I. EFEKTY KSZTAŁCENIA DLA KIERUNKU AUTOMATYKA I ROBOTYKA T- obszar kształcenia w zakresie nauk technicznych 1-Studia pierwszego stopnia A- Profil ogólnoakademicki W- kategoria wiedzy U Kategoria umiejętności
Automatyzacja. Ćwiczenie 9. Transformata Laplace a sygnałów w układach automatycznej regulacji
 Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII. Roman Kaula
 POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
HARMONOGRAM EGZAMINÓW - rok akademicki 2015/ semestr zimowy. Kierunek ENERGETYKA - studia inżynierskie środa
 Kierunek ENERGETYKA - studia inżynierskie 1 Analiza matematyczna Materiałoznawstwo 2 Termodynamika Wytrzymałość materiałów Gospodarka energetyczna Technologie energetyczne III Spalanie paliw stałych, ciekłych
Kierunek ENERGETYKA - studia inżynierskie 1 Analiza matematyczna Materiałoznawstwo 2 Termodynamika Wytrzymałość materiałów Gospodarka energetyczna Technologie energetyczne III Spalanie paliw stałych, ciekłych
Mechatronika Uniwersytet Rzeszowski
 Mechatronika Uniwersytet Rzeszowski Plan studiów inżynierskich STUDIA INŻYNIERKSIE (7 semestrów) Studia stacjonarne i niestacjonarne Specjalności: Projektowanie systemów mechatronicznych Systemy wbudowane
Mechatronika Uniwersytet Rzeszowski Plan studiów inżynierskich STUDIA INŻYNIERKSIE (7 semestrów) Studia stacjonarne i niestacjonarne Specjalności: Projektowanie systemów mechatronicznych Systemy wbudowane
4. Sylwetka absolwenta
 1. Technik mechatronik to nowoczesny i przyszłościowy zawód związany z projektowaniem, montowaniem, programowaniem oraz ekspoloatacją urządzeń i systemów mechatronicznych z wykorzystaniem technik komputerowych
1. Technik mechatronik to nowoczesny i przyszłościowy zawód związany z projektowaniem, montowaniem, programowaniem oraz ekspoloatacją urządzeń i systemów mechatronicznych z wykorzystaniem technik komputerowych
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Efekty kształcenia dla kierunku studiów INFORMATYKA, Absolwent studiów I stopnia kierunku Informatyka WIEDZA
 Symbol Efekty kształcenia dla kierunku studiów INFORMATYKA, specjalność: 1) Sieciowe systemy informatyczne. 2) Bazy danych Absolwent studiów I stopnia kierunku Informatyka WIEDZA Ma wiedzę z matematyki
Symbol Efekty kształcenia dla kierunku studiów INFORMATYKA, specjalność: 1) Sieciowe systemy informatyczne. 2) Bazy danych Absolwent studiów I stopnia kierunku Informatyka WIEDZA Ma wiedzę z matematyki
Wykład I. Podstawowe pojęcia. Studia Podyplomowe INFORMATYKA Architektura komputerów
 Studia Podyplomowe INFORMATYKA Architektura komputerów Wykład I Podstawowe pojęcia 1, Cyfrowe dane 2 Wewnątrz komputera informacja ma postać fizycznych sygnałów dwuwartościowych (np. dwa poziomy napięcia,
Studia Podyplomowe INFORMATYKA Architektura komputerów Wykład I Podstawowe pojęcia 1, Cyfrowe dane 2 Wewnątrz komputera informacja ma postać fizycznych sygnałów dwuwartościowych (np. dwa poziomy napięcia,
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Kierunek Informatyka stosowana Studia stacjonarne Studia pierwszego stopnia
 Studia pierwszego stopnia I rok Matematyka dyskretna 30 30 Egzamin 5 Analiza matematyczna 30 30 Egzamin 5 Algebra liniowa 30 30 Egzamin 5 Statystyka i rachunek prawdopodobieństwa 30 30 Egzamin 5 Opracowywanie
Studia pierwszego stopnia I rok Matematyka dyskretna 30 30 Egzamin 5 Analiza matematyczna 30 30 Egzamin 5 Algebra liniowa 30 30 Egzamin 5 Statystyka i rachunek prawdopodobieństwa 30 30 Egzamin 5 Opracowywanie
Cyfrowe algorytmy sterowania AR S1 semestr 4 Projekt 4
 Cyfrowe algorytmy sterowania AR S1 semestr 4 Projekt 4 MPC Sterowanie predykcyjne Cel: Poznanie podstaw regulacji predykcyjnej i narzędzi do badań symulacyjnych Wykonali: Konrad Słodowicz Patryk Frankowski
Cyfrowe algorytmy sterowania AR S1 semestr 4 Projekt 4 MPC Sterowanie predykcyjne Cel: Poznanie podstaw regulacji predykcyjnej i narzędzi do badań symulacyjnych Wykonali: Konrad Słodowicz Patryk Frankowski
Tabela odniesień efektów kierunkowych do efektów obszarowych
 Umiejscowienie kierunku w obszarze kształcenia Kierunek studiów automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika
Umiejscowienie kierunku w obszarze kształcenia Kierunek studiów automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika
SCENARIUSZ LEKCJI. Streszczenie. Czas realizacji. Podstawa programowa
 Autorzy scenariusza: SCENARIUSZ LEKCJI OPRACOWANY W RAMACH PROJEKTU: INFORMATYKA MÓJ SPOSÓB NA POZNANIE I OPISANIE ŚWIATA. PROGRAM NAUCZANIA INFORMATYKI Z ELEMENTAMI PRZEDMIOTÓW MATEMATYCZNO-PRZYRODNICZYCH
Autorzy scenariusza: SCENARIUSZ LEKCJI OPRACOWANY W RAMACH PROJEKTU: INFORMATYKA MÓJ SPOSÓB NA POZNANIE I OPISANIE ŚWIATA. PROGRAM NAUCZANIA INFORMATYKI Z ELEMENTAMI PRZEDMIOTÓW MATEMATYCZNO-PRZYRODNICZYCH
Projektowanie mechatroniczne. Technika Hardware-in-the-loop a założenia Industry 4.0
 Projektowanie mechatroniczne. Technika Hardware-in-the-loop a założenia Industry 4.0 Krzysztof Pietrusewicz BEZPIECZEŃSTWO 1. Wprowadzenie W artykule niniejszym przedstawiono technikę symulacji, w ramach
Projektowanie mechatroniczne. Technika Hardware-in-the-loop a założenia Industry 4.0 Krzysztof Pietrusewicz BEZPIECZEŃSTWO 1. Wprowadzenie W artykule niniejszym przedstawiono technikę symulacji, w ramach
ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC
 Mgr inż. Szymon BORYS Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.213 ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC Streszczenie: W artykule przedstawiono możliwość
Mgr inż. Szymon BORYS Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.213 ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC Streszczenie: W artykule przedstawiono możliwość
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny