Podstawy automatyki i robotyki AREW001 Wykład 2 Układy regulacji i regulatory
|
|
|
- Magda Kot
- 7 lat temu
- Przeglądów:
Transkrypt


1 Podstawy automatyki i robotyki AREW001 Wykład 2 Układy regulacji i regulatory Dr inż. Zbigniew Zajda Katedra Automatyki, Mechatroniki i Systemów Sterowania Wydział Elektroniki Politechniki Wrocławskiej
2 Program wykładu Układy sterowania w przemyśle Dynamika obiektów Podstawowe człony dynamiczne
3 Klasyfikacja systemów sterownia Kryteria: technika realizacji (hydrauliczne, pneumatyczne, elektryczne) zadania systemu (sterownie logiczne, regulacja, monitorowanie stanu procesu) sposób przetwarzania informacji ciągłej stopień scentralizowania wielkość systemu (ilość zmiennych)
4 Klasyfikacja systemów sterownia - technika realizacji Siłownik hydrauliczne Rzadko wykorzystywane elementy dynamiczne. W powszechnym użyciu siłowniki z koniecznym oprzyrządowaniem (wzmacniacze, rozdzielacze sygnału, zawory itp.) pneumatyczne elektryczne (elektroniczne) Zadajnik wartości zadanej SP Człon korekcyjny Wzmacniacz strumieniowy Sygnał wielkości zmiennej procesowej (wielkości regulowanej) Regulator typu PI
5 Klasyfikacja systemów sterownia - technika realizacji hydrauliczne pneumatyczne Dzisiaj używane w zasadzie tylko w procesach o dużym zagrożeniu wybuchem. Elementem spotykanym powszechnie są jedynie zawory z napędem pneumatycznym. elektryczne (elektroniczne)
6 Klasyfikacja systemów sterownia - technika realizacji hydrauliczne pneumatyczne Dzisiaj używane w zasadzie tylko w procesach o dużym zagrożeniu wybuchem. Elementem spotykanym powszechnie są jedynie zawory z napędem pneumatycznym. elektryczne (elektroniczne) Regulator typu PI
 Elementom takich systemów poświęcony")
7 Klasyfikacja systemów sterownia - technika realizacji hydrauliczne pneumatyczne elektryczne (elektroniczne) Elementom takich systemów poświęcony jest wykład.
 bezpośredniego")
8 Regulatory - technika realizacji hydrauliczne pneumatyczne elektryczne (elektroniczne) bezpośredniego działania
 i dwustanowo oddziaływuje na obiekt (załączwyłącz). Około 75% wykorzystywanych systemów sterowania.")
9 Klasyfikacja systemów sterownia - zadania systemu Zadania jakie może realizować system sterowania procesem: sterownie logiczne Sterowanie logiczne (binarne, dwustanowe) wykorzystuje dwustanową informację o obiekcie (otwarte zamknięte, włączone wyłączone, poziom osiągnięty nieosiągnięty) i dwustanowo oddziaływuje na obiekt (załączwyłącz). Około 75% wykorzystywanych systemów sterowania. Podstawowym urządzeniem sterującym w takich systemach jest sterownik swobodnie programowalny (PLC) układy regulacji monitorowanie stanu procesu
10 Klasyfikacja systemów sterownia - zadania systemu Zadania jakie może realizować system sterowania procesem: sterownie logiczne układy regulacji Układ regulacji składa się z elementu porównującego (sumator), regulatora, elementu wykonawczego (zawór z napędem, siłownik, silnik), obiektu sterowania oraz układu pomiarowego (czujnik, przetwornik). Celem regulacji jest doprowadzenie do stanu, kiedy wielkość sterowana osiąga wartość równą wartości zadanej monitorowanie stanu procesu

11 Klasyfikacja systemów sterownia - zadania systemu Zadania jakie może realizować system sterowania procesem: sterownie logiczne układy regulacji monitorowanie stanu procesu
12 Klasyfikacja systemów sterownia - sposób przetwarzania informacji ciągłej Sposoby przetwarzania informacji ciągłej: technika analogowa Zmienia się poziom, postać fizyczna sygnału ale sygnał cały czas pozostaje sygnałem ciągłym. Systemy bardzo szybkie ale kłopoty z uruchamianiem, stałością parametrów i dokładnością. Obecnie rzadko stosowane. technika cyfrowe Sygnały ciągłe w przetwornikach analogowo cyfrowych przetwarzane są na sygnały cyfrowe (liczby), przetwarzanie odbywa się cyfrowo, wyniki przetwarzane są w przetwornikach cyfrowo analogowych na postać cyfrową. Regulatory cyfrowe często zabudowywane są w obudowy o standardach przyjętych dla regulatorów analogowych, tak by wymiana regulatora z punktu widzenia użytkownika nie wymagała żadnych zmian w instalacji.
13 Klasyfikacja systemów sterownia - stopień scentralizowania Stopień scentralizowania systemu ewoluował w czasie: zbiór niezależnych układów sterujących, zbiór niezależnych układów sterujących z dostępem do najważniejszych informacji i możliwością ręcznego sterowania przez operatora z centralnej sterowni, systemy bezpośredniego sterownia cyfrowego z centralnego komputera z kanałami przemysłowymi systemy bezpośredniego sterownia cyfrowego z rezerwą analogową lub centralne zbieranie informacji i układy analogowe z rezerwą cyfrową systemy rozproszone wiele sterowników PLC połączonych siecią przemysłową stopniowe ograniczanie ilości sterowników i zastępowanie ich większymi sterownikami z oddalonymi kasetami wejść/wyjść i sieciową komunikacją ze sterownikiem sterownik przemysłowy o dużej mocy obliczeniowej ( z reddundancją) i liczne oddalone kasety wejść/wyjść oraz urządzenia pomiarowe i wykonawcze z kartami sieciowymi
14 Dynamika obiektów Obiekt z punktu widzenia regulatora
15 Regulatory automatyczne - klasyfikacja Najbardziej znanym regulatorem używanym w praktyce jest regulator PID, w którym w nazwie znajdują się litery pochodzące od rodzajów sterowania jakie on w sobie zawiera: proporcjonalne P (ang. Proporcjonal), całkujące I (ang. Integral), różniczkujące D (ang. Derivative). Stosowane są również wersje uproszczone regulatora PID składające się z wybranych elementów składowych tego regulatora (P, I, PI, PD). Regulatory przemysłowe w zależności od rodzaju sterowania klasyfikowane są następująco: Regulatory: dwu- i trójstawny Regulator proporcjonalny P Regulator całkujący I Regulator proporcjonalno-całkujący PI Regulator proporcjonalno-różniczkujący PD Regulator proporcjonalno-całkująco-różniczkujący PID W większości regulatorów przemysłowych jako źródła mocy wykorzystywane są: napięcie, olej, powietrze lub energia sygnału mierzonego. W zależności od rodzaju źródła mocy regulatory mogą być klasyfikowane jako: elektroniczne, hydrauliczne, pneumatyczne, regulatory bezpośredniego działania (bez energii pomocniczej). Rodzaj użytego regulatora zależy od natury obiektu, warunków operacyjnych uwzględniających bezpieczeństwo, koszt, dostępność, niezawodność, dokładność, wagę i rozmiar.
16 Regulatory - technika realizacji hydrauliczne pneumatyczne elektryczne (elektroniczne) bezpośredniego działania Regulatory poziomu cieczy Regulatory te najczęściej jako człon pomiarowy mają pływak, głównie ze względu na jego prostą budowę. Jednak w przypadku zbiorników ciśnieniowych powstają trudności spowodowane potrzebą dobrych uszczelnień i jednocześnie małego tarcia w miejscach wprowadzeń dźwigni i trzpienia zaworu. Przykładowa konstrukcja to pływak, który za pośrednictwem dźwigni przestawia trzpień zaworu regulacyjnego. Komory pływakowe oraz zawory regulatorów poziomu są zazwyczaj obliczone na ciśnienie rzędu kn/m2, średnice zaworów są rzędu 40 mm, zmiana poziomu o mm powoduje pełne przestawienie zaworu.
 bezpośredniego")
17 Regulatory - technika realizacji hydrauliczne pneumatyczne elektryczne (elektroniczne) bezpośredniego działania
18 Regulatory liniowe - regulator proporcjonalny P REGULATOR PROPORCJONALNY P Dla regulatora proporcjonalnego, zależność pomiędzy wyjściem regulatora u(t) i wykonawczym sygnałem uchybu e(t) jest następująca Transmitancja regulatora proporcjonalnego gdzie K p jest wzmocnieniem proporcjonalnym. Regulator proporcjonalny jest w istocie wzmacniaczem z przestrajalnym wzmocnieniem.
19 Regulatory liniowe - regulator całkujący I REGULATOR CAŁKUJĄCY I W regulatorze ze sterowaniem całkującym, wartość wyjściowa regulatora u(t) jest przyrostem proporcjonalnym do wykonawczego sygnału uchybu e(t). lub gdzie Ki jest przestrajalną stałą. Transmitancja regulatora całkującego
20 Regulatory liniowe - regulator proporcjonalno-całkujący PI REGULATOR PROPORCJONALNO-CAŁKUJĄCY PI Wyjście regulatora proporcjonalno-całkującego zdefiniowane jest jako lub w postaci transmitancji gdzie T i nazywa się czasem całkowania.
21 Regulatory liniowe - regulator proporcjonalno-różniczkujący PD REGULATOR PROPORCJONALNO-RÓŻNICZKUJĄCY PD Sterowanie regulatora proporcjonalno-różniczkującego zdefiniowane jest jako i w postaci transmitancji gdzie T d nazywane jest czasem różniczkowania.
22 Regulatory liniowe - regulator proporcjonalno-całkująco-różniczkujący PID REGULATOR PROPORCJONALNO-CAŁKUJĄCO-RÓŻNICZKUJĄCY PID Połączenie sterowania proporcjonalnego, całkującego i różniczkującego nosi nazwę sterowania PID. To połączenie ma zalety każdego z trzech składników. Równanie regulatora w postaci czasowej ma postać lub w postaci transmitancji gdzie K p jest wzmocnieniem proporcjonalnym, T i czasem całkowania oraz T d czasem różniczkowania. Schemat blokowy regulatora PID.
*1(t)/ Δe(t)*1(t) T i - czas całkowania (czas zdwojenia) wyznacza się z odpowiedzi regulatora na skokową zmianę uchybu przyjmując T d =")
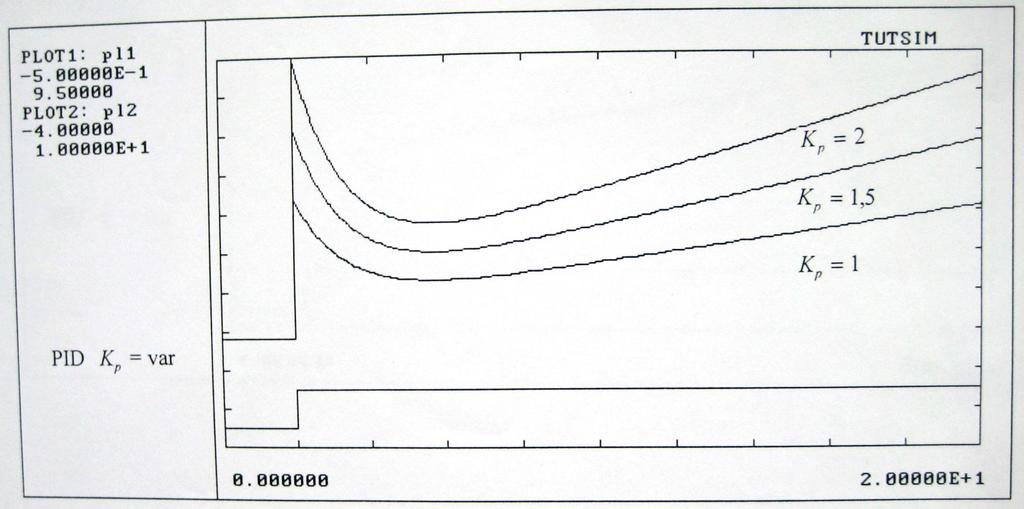
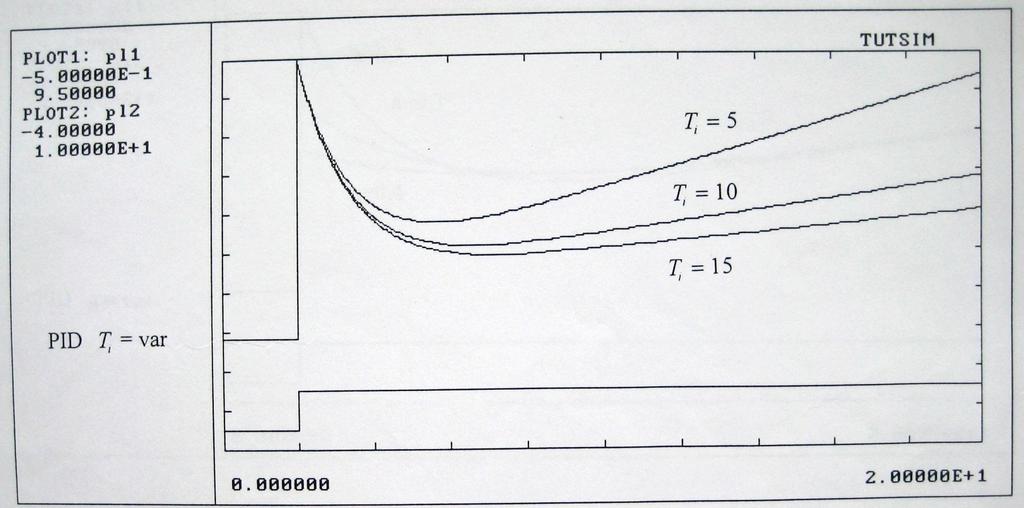
23 Regulatory liniowe - regulator proporcjonalno-całkująco-różniczkujący PID Badanie dynamiki regulatora PID K p - wzmocnienie proporcjonalne wyznacza się przyjmując T i = oraz T d = 0 K p = Δ u(t)*1(t)/ Δe(t)*1(t) T i - czas całkowania (czas zdwojenia) wyznacza się z odpowiedzi regulatora na skokową zmianę uchybu przyjmując T d = 0
 wyznacza się z odpowiedzi regulatora na uchyb narastający liniowo, przyjmując T i")
24 Regulatory liniowe - regulator proporcjonalno-całkująco-różniczkujący PID Badanie dynamiki regulatora PID T d czas różniczkowania (czas wyprzedzenia) wyznacza się z odpowiedzi regulatora na uchyb narastający liniowo, przyjmując T i =
25 Regulatory liniowe - regulator proporcjonalno-całkująco-różniczkujący PID
26 Regulatory liniowe - regulator proporcjonalno-całkująco-różniczkujący PID


27 Regulatory liniowe - regulator proporcjonalno-całkująco-różniczkujący PID
28 Regulatory liniowe - regulator proporcjonalno-całkująco-różniczkujący PID
29 Dobór nastaw regulatorów PID Dobór nastaw (= strojenie = ang. tuning) regulatorów Wymagania stawiane metodom doboru nastaw powinny być w miarę proste, nie powinny wymagać dokładnej znajomości modelu obiektu potrzebne parametry powinny być łatwe do zmierzenia, zarejestrowania i/lub wyznaczenia, powinny dawać wyniki w miarę szybko, eksperyment niezbędny do przeprowadzenia procedury dodboru nie powinien zaburzać samego procesu, powinna istnieć możliwość wykorzystania do samoczynnego doboru nastaw przez regulator
30 Dobór nastaw regulatorów PID Metody Zieglera-Nicholsa metoda cyklu granicznego modyfikacja Hanssena-Offereinsa metoda odpowiedzi skokowej modyfikacja Chiena, Hronesa, Reswicka modyfikacja Cohena Coona Metoda przekaźnikowa Åstroma i Hagglunda modyfikacja Abbasa
31 Dobór nastaw regulatorów PID metoda cyklu granicznego Metoda cyklu granicznego II metoda Zieglera-Nicholsa Metoda opracowana przez Johna Zieglera i Nathaniela Nicholsa w 1942 roku i nadal chętnie stosowana. Metoda doświadczalna nie potrzebujemy znajomości modelu obiektu Punktem wyjścia dla procesu doboru nastaw regulatora PID jest ustalenie, jak dynamiczna będzie reakcja układu sterowania na błąd uchybu. proces wolnozmienny parametry regulatora PID mogą być tak dobrane, by cały układ reagował natychmiast na wszelkie zmiany i odchylenia regulowanej wielkości od wartości zadanej proces szybkozmienny konieczne są szybkie reakcje układu, wówczas parametry regulatora PID dobiera się tak, by działając łagodził on skutki szybkich zmian, rozciągając korekcję w czasie Istotą strojenia układów pracujących w pętli jest ustalenie, jak gwałtownie sterowany proces reaguje na sygnały korekcyjne z regulatora oraz jak szybka powinna być reakcja regulatora PID na zmiany wielkości regulowanej w celu eliminacji uchybu.
32 Dobór nastaw regulatorów PID metoda cyklu granicznego Druga reguła Zieglera-Nicholsa wymaga badania układu w pętli zamkniętej i znana jest też pod nazwą cyklu granicznego lub granicy stabilności. Regulator należy skonfigurować jako regulator czysto proporcjonalny (ewentualnie ustawić w regulatorze PID maksymalny możliwy czas całkowania i możliwie mały czas różniczkowania). Następnie wzmocnienie Kp zwiększa się, aż do wystąpienia drgań niegasnących. Niech K kr oznacza wzmocnienie regulatora, odpowiadające tej granicy stabilności, dla której możliwe było oszacowanie okresu dragań T osc. Wyznaczanie wzmocnienia krytycznego i okresu drgań
33 Dobór nastaw regulatorów PID metoda cyklu granicznego Nastawy w/g Zieglera-Nicholsa dla wariantu z zamkniętym układem regulacji Kryterium minimum czasu regulacji najczęściej stosowane Przeregulowanie ok. 30% Typ regulatora Kp Ti Td P 0,5 K kr PI 0,45 K kr 0,83 T osc PID 0,6 K kr 0,5 T osc 0,125T osc
34 Dobór nastaw regulatorów PID metoda cyklu granicznego Kryterium aperiodyczności (dopuszczalne przeregulowanie 0%) Rzadko spotykane w literaturze bywa nazywane modyfikacją Pessena Typ regulatora Kp Ti Td P 0,2 K kr PI 0,15 K kr 0,4 T osc PID 0,25 K kr 0,33 T osc 0,5T osc
35 Dobór nastaw regulatorów PID metoda cyklu granicznego Metoda cyklu granicznego - podsumowanie Metoda daje akceptowalne rezultaty, gdy 2 < K 0 K kr < 20, gdzie K 0 wzmocnienie statyczne dla pętli otwartej układu. Sporym ograniczeniem jest konieczność doprowadzenia obiektu do granicy stabilności nie zawsze można to bezpiecznie zrobić Wyniki często nie są zadowalające Nastawy dobrane wg metody Z-N są traktowane zazwyczaj jako pierwsze przybliżenie nastaw optymalnych w praktyce inżynierskiej zwykle dobór nastaw optymalnych odbywa się metodą heurystyczną, czyli opartą na doświadczeniach personelu Druga reguła Zieglera - Nicholsa bywa stosowana do automatycznego strojenia regulatorów (samostrojenia).
36 Dobór nastaw regulatorów PID metoda odpowiedzi skokowej Metoda odpowiedzi skokowej I metoda Zieglera-Nicholsa Ziegler i Nichols zaobserwowali, że wszystkie dane niezbędne, aby dobrać nastawy regulatora, można obliczyć analizując parametry odpowiedzi skokowej Metodę opartą na pomiarze charakterystyk skokowych obiektu stosuje się do obiektów, których przybliżony model matematyczny można aproksymować modelem obiektu inercyjnego (wieloinercyjnego) z opóźnieniem. Większość obiektów występujących w przemyśle można opisać w ten sposób. Metoda polega na podaniu sygnału wymuszenia skokowego i rejestracji odpowiedzi przy otwartej linii sprzężenia zwrotnego
37 Dobór nastaw regulatorów PID metoda odpowiedzi skokowej Sposób postępowania: ustawić regulator P na Kp=1 (lub odłączyć regulator) przerwać pętlę sprzężenia zwrotnego doprowadzić wartość zadaną do takiej wielkości, aby na wyjściu obiektu otrzymać wartość zbliżoną do stałej wykonać skok wartości zadanej o określoną wartość u zarejestrować odpowiedź obiektu y(t) wyznaczyć parametry charakterystyczne odpowiedzi skokowej i obliczyć nastawy Możliwe odpowiedzi obiektu: statyczna lub astatyczna Modele obiektów: obiekt statyczny z opóźnieniem lub astatyczny z opóźnieniem Ograniczenie metody:
38 Dobór nastaw regulatorów PID metoda odpowiedzi skokowej Model obiektu wg Küpfmüllera
39 Dobór nastaw regulatorów PID metoda odpowiedzi skokowej Model obiektu
40 Dobór nastaw regulatorów PID metoda odpowiedzi skokowej Modyfikacje metody odpowiedzi skokowej
41 Dobór nastaw regulatorów PID metoda odpowiedzi skokowej Podsumowanie Metoda jest bardzo prosta Nie trzeba doprowadzać układu do granicy stabilności Można zadać niewielki skok Warunkiem powodzenia jest ustalenie wartości wyjściowej w warunkach sterowania bez pętli sprzężenia zwrotnego Długi czas pracy obiektu bez układu regulacji (z otwartą pętlą sprzężenia zwrotnego) Dobre rezultaty metody wskaźniki jakości regulacji dla dużego zakresu zmienności parametrów modeli obiektów są wyraźnie lepsze, niż przy metodzie cyklu granicznego
42 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny
43 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Układem regulacji dwustawnej (dwupołożeniowej) nazywa się układ, w którym regulator może nastawiać tylko dwie wartości wielkości sterującej obiektem regulacji. Schemat układu regulacji dwupołożeniowej Zgodnie z podaną definicją regulator dwustawny RD musi posiadać taką charakterystykę statyczną, aby na jego wyjściu istniały dwa stany stabilne. Jest to tzw. charakterystyka przekaźnikowa.
44 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Charakterystyki przekaźnikowe
45 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Charakterystyka statyczna przekaźnika dwupołożeniowego
46 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Regulator dwustawny (dwupołożeniowy) Regulatory dwupołożeniowe zalicza się do najprostszych rodzajów regulatorów. Posiadają one dwa stabilne stany wyjściowe oznaczane zazwyczaj jako: 1 - włączony (aktywny) 0 wyłączony (nieaktywny) Ze względu na małą dokładność regulacji wykorzystywane są tam, gdzie duża dokładność nie jest wymagana (sprzęt gospodarstwa domowego) lub tam gdzie duża dokładność regulacji nie jest wskazana np. przy sterowaniu pracą pomp, sprężarek, agregatów chłodniczych. Z racji swojej prostoty są jednocześnie tanie i niezawodne. Rysunek przedstawia przykład wykorzystania regulatora dwupołożeniowego bezposredniego działania (inaczej: bez energii pomocniczej )do utrzymywania stałego poziomu cieczy. Przy zbyt niskim poziomie cieczy następuje zamknięcie obwodu elektrycznego pompy i uzupełnienie ubytku wody. Schemat ten przedstawia jedynie ideę działania regulatora dwupołożeniowego, gdyż nie uwzględnia możliwości regulacji wartości poziomu cieczy oraz konieczności stosowania wyłącznika migowego z histerezą.
47 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny
48 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Przebiegi czasowe w układzie regulacji dwustawnej obiektu inercyjnego pierwszego rzędu z regulatorem o strefie nieczułości N = H/2
49 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Najprostszym układem regulatora jest przekaźnik dwupołożeniowy współdziałający ze wzmacniaczem błędu. Układ tego typu realizowany jest elektronicznie i ma charakterystykę asymetryczną z histerezą. Układ regulacji dwupołożeniowej z regulatorem elektronicznym Układy regulacji dwustawnej znalazły szerokie zastosowanie do regulacji temperatury w urządzeniach ogrzewanych elektrycznie
50 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Piec jest zazwyczaj obiektem wieloinercyjnym z opóźnieniem, o transmitancji gdzie: T1...Tn - stałe czasowe pieca, Tr - czas opóźnienia pieca, k - współczynnik wzmocnienia pieca (określa temperaturę ustaloną pieca przy wymuszeniu skokowym na wejściu)

51 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Odpowiedź skokowa pieca Uproszczony model pieca wg Küpfmüllera, gdzie: T - zastępcza stała czasowa pieca, T 0 - zastępczy czas opóźnienia pieca, k - zastępczy współczynnik wzmocnienia pieca
52 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Sterowanie obiektem inercyjnym pierwszego rzędu z opóźnieniem Odpowiedź skokowa obiektu termicznego, inercyjnego pierwszego rzędu z opóźnieniem
53 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Przebiegi czasowe w układzie regulacji dwustawnej obiektu inercyjnego pierwszego rzędu z opóźnieniem
54 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Przebiegi czasowe w układzie regulacji dwustawnej obiektu inercyjnego pierwszego rzędu z opóźnieniem przy różnym poziomie wartości zadanej
55 Regulatory o nieciągłym sygnale wyjściowym - regulator dwustawny Regulacja dwustawna (~ PID) Przykład regulatora dwustawnego wykorzystującego miernik wychyłowy z fotoelektrycznym detektorem położenia wskazówki
56 Regulatory o nieciągłym sygnale wyjściowym - regulator trójstawny 2N Charakterystyka statyczna przekaźnika trójstawnego
57 Regulatory o nieciągłym sygnale wyjściowym - regulator trójstawny y w 0 2a 2(a+h) 0 t u U 0 t Przebiegi wielkości regulowanej y(t) i sygnału sterującego w układzie regulacji trójpołożeniowej
58 Regulatory ciągłe z dyskretnym sygnałem wyjściowym
59 Regulatory ciągłe z dyskretnym sygnałem wyjściowym Sygnał wyjściowy regulatora ciągłego Sygnał wyjściowy generatora piły Sygnał wyjściowy komparatora Zasada modulacji szerokości impulsu
60 Moduły specjalizowane
61
62
63
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa.
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Podział regulatorów: I. Regulatory elektroniczne: II. Regulatory bezpośredniego działania: III. Regulatory dwustawne i trójstawne:
 REGULATORY CK68 Nie można wyświetlić połączonego obrazu. Plik mógł zostać przeniesiony lub usunięty albo zmieniono jego nazwę. Sprawdź, czy łącze wskazuje poprawny plik i lokalizację. Zadania regulatorów
REGULATORY CK68 Nie można wyświetlić połączonego obrazu. Plik mógł zostać przeniesiony lub usunięty albo zmieniono jego nazwę. Sprawdź, czy łącze wskazuje poprawny plik i lokalizację. Zadania regulatorów
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
SIMATIC S Regulator PID w sterowaniu procesami. dr inż. Damian Cetnarowicz. Plan wykładu. I n t e l i g e n t n e s y s t e m y z e
 Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 1. Dobór rodzaju i nastaw regulatorów PID Rodzaje regulatorów 2 Regulatory dwustawne (2P)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 1. Dobór rodzaju i nastaw regulatorów PID Rodzaje regulatorów 2 Regulatory dwustawne (2P)
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Automatyka i sterowanie w gazownictwie. Regulatory w układach regulacji
 Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
WYDZIAŁ ELEKTRYCZNY KATEDRA AUTOMATYKI I ELEKTRONIKI. Badanie układu regulacji dwustawnej
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ
 REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ 1 1. Zadania regulatorów w układach regulacji automatycznej Do podstawowych zadań regulatorów w układach regulacji automatycznej należą: porównywanie wartości
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ 1 1. Zadania regulatorów w układach regulacji automatycznej Do podstawowych zadań regulatorów w układach regulacji automatycznej należą: porównywanie wartości
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Praktyka inżynierska korzystamy z tego co mamy. regulator. zespół wykonawczy. obiekt (model) Konfiguracja regulatora
 Konfiguracja regulatora") raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Regulatory wykonywane są z zaworami zamykanymi lub otwieranymi przy wzroście temperatury. Pozycja temperatury może być ukośna, pozioma lub pionowa.
 27. Rodzaje regulatorów w instalacjach przemysłowych. I podział: Regulatory Regulatory są urządzeniami technicznymi, służącymi do wytwarzania na podstawie uchybu regulacji sygnału sterującego, to jest
27. Rodzaje regulatorów w instalacjach przemysłowych. I podział: Regulatory Regulatory są urządzeniami technicznymi, służącymi do wytwarzania na podstawie uchybu regulacji sygnału sterującego, to jest
11. Dobór rodzaju, algorytmu i nastaw regulatora
 205 11. Dobór rodzaju, algorytmu i nastaw regulatora 11.1 Wybór rodzaju i algorytmu regulatora Poprawny wybór rodzaju regulatora i jego algorytmu uzależniony jest od znajomości (choćby przybliżonej) właściwości
205 11. Dobór rodzaju, algorytmu i nastaw regulatora 11.1 Wybór rodzaju i algorytmu regulatora Poprawny wybór rodzaju regulatora i jego algorytmu uzależniony jest od znajomości (choćby przybliżonej) właściwości
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa
 Rok akademicki 2015/2016 Semestr letni PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa Wstęp teoretyczny: W układzie regulacji określa
Rok akademicki 2015/2016 Semestr letni PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa Wstęp teoretyczny: W układzie regulacji określa
Dobór parametrów regulatora - symulacja komputerowa. Najprostszy układ automatycznej regulacji można przedstawić za pomocą
 Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
UWAGA 2. Wszystkie wyniki zapisywać na dysku Dane E: (dotyczy symulacji i pomiarów rzeczywistych)
") Cel ćwiczenia: Zapoznanie się z budową i zasadą działania regulatorów ciągłych oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z budową i zasadą działania regulatorów ciągłych oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Regulacja dwupołożeniowa (dwustawna)
") Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Dla naszego obiektu ciągłego: przy czasie próbkowania T p =2.
 1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Spis treści. Dzień 1. I Elementy układu automatycznej regulacji (wersja 1109) II Rodzaje regulatorów i struktur regulacji (wersja 1109)
 II Rodzaje regulatorów i struktur regulacji (wersja 1109)") Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Dobór parametrów układu regulacji, Identyfikacja parametrów obiektów dynamicznych Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Dobór parametrów układu regulacji, Identyfikacja parametrów obiektów dynamicznych Kierunek studiów: Transport, Stacjonarne
Regulator P (proporcjonalny)
") Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
Ćw. S-III.4 ELEMENTY ANALIZY I SYNTEZY UAR (Dobór nastaw regulatora)
") Dr inż. Michał Chłędowski PODSTAWY AUTOMATYKI I ROBOTYKI LABORATORIUM Ćw. S-III.4 ELEMENTY ANALIZY I SYNTEZY UAR (Dobór nastaw regulatora) Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z pojęciem "syntezy
Dr inż. Michał Chłędowski PODSTAWY AUTOMATYKI I ROBOTYKI LABORATORIUM Ćw. S-III.4 ELEMENTY ANALIZY I SYNTEZY UAR (Dobór nastaw regulatora) Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z pojęciem "syntezy
II. STEROWANIE I REGULACJA AUTOMATYCZNA
 II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
UWAGA. Wszystkie wyniki zapisywać na dysku Dane E: Program i przebieg ćwiczenia:
 Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
LAB-EL LB-760A: regulacja PID i procedura samostrojenia
 Page 1 of 5 Copyright 2003-2010 LAB-EL Elektronika Laboratoryjna www.label.pl LAB-EL LB-760A: regulacja PID i procedura samostrojenia Nastawy regulatora PID W regulatorze LB-760A poczynając od wersji 7.1
Page 1 of 5 Copyright 2003-2010 LAB-EL Elektronika Laboratoryjna www.label.pl LAB-EL LB-760A: regulacja PID i procedura samostrojenia Nastawy regulatora PID W regulatorze LB-760A poczynając od wersji 7.1
Wykład nr 1 Podstawowe pojęcia automatyki
 Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Zespół Placówek Kształcenia Zawodowego w Nowym Sączu
 Zespół Placówek Kształcenia Zawodowego w Nowym Sączu Laboratorium układów automatyki Temat ćwiczenia: Optymalizacja regulatora na podstawie krytycznego nastawienia regulatora wg Zieglera i Nicholsa. Symbol
Zespół Placówek Kształcenia Zawodowego w Nowym Sączu Laboratorium układów automatyki Temat ćwiczenia: Optymalizacja regulatora na podstawie krytycznego nastawienia regulatora wg Zieglera i Nicholsa. Symbol
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Automatyzacja. Ćwiczenie 9. Transformata Laplace a sygnałów w układach automatycznej regulacji
 Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
WYDZIAŁ PPT / KATEDRA INŻYNIERII BIOMEDYCZNEJ D-1 LABORATORIUM Z MIERNICTWA I AUTOMATYKI Ćwiczenie nr 7. Badanie jakości regulacji dwupołożeniowej.
 Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Automatyka w inżynierii środowiska. Wykład 1
 Automatyka w inżynierii środowiska Wykład 1 Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 21.01.2012 Obecność na wykładach: zalecana. Zakres tematyczny przedmiotu: (10 godzin wykładów) Standardowe
Automatyka w inżynierii środowiska Wykład 1 Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 21.01.2012 Obecność na wykładach: zalecana. Zakres tematyczny przedmiotu: (10 godzin wykładów) Standardowe
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
REGULATOR PI W SIŁOWNIKU 2XI
 REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
4. Właściwości eksploatacyjne układów regulacji Wprowadzenie. Hs () Ys () Ws () Es () Go () s. Vs ()
 Ys () Ws () Es () Go () s. Vs ()") 4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
WYDZIAŁ PPT / KATEDRA INŻYNIERII BIOMEDYCZNEJ D-1 LABORATORIUM Z AUTOMATYKI I ROBOTYKI Ćwiczenie nr 4. Badanie jakości regulacji dwupołożeniowej.
 Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki. Badanie układu regulacji poziomu cieczy
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr. 6 Badanie układu regulacji poziomu cieczy Laboratorium z przedmiotu: PODSTAWY AUTOMATYKI 2 Kod: ES1C400 031 Opracowanie:
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr. 6 Badanie układu regulacji poziomu cieczy Laboratorium z przedmiotu: PODSTAWY AUTOMATYKI 2 Kod: ES1C400 031 Opracowanie:
Z-ZIP-103z Podstawy automatyzacji Basics of automation
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 01/013 Z-ZIP-103z Podstawy automatyzacji Basics of automation A. USYTUOWANIE MODUŁU
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 01/013 Z-ZIP-103z Podstawy automatyzacji Basics of automation A. USYTUOWANIE MODUŁU
K p. K o G o (s) METODY DOBORU NASTAW Metoda linii pierwiastkowych Metody analityczne Metoda linii pierwiastkowych
 METODY DOBORU NASTAW Metoda linii pierwiastkowych Metody analityczne Metoda linii pierwiastkowych") METODY DOBORU NASTAW 7.3.. Metody analityczne 7.3.. Metoda linii pierwiastkowych 7.3.2 Metody doświadczalne 7.3.2.. Metoda Zieglera- Nicholsa 7.3.2.2. Wzmocnienie krytyczne 7.3.. Metoda linii pierwiastkowych
METODY DOBORU NASTAW 7.3.. Metody analityczne 7.3.. Metoda linii pierwiastkowych 7.3.2 Metody doświadczalne 7.3.2.. Metoda Zieglera- Nicholsa 7.3.2.2. Wzmocnienie krytyczne 7.3.. Metoda linii pierwiastkowych
SYNTEZA UKŁADU DWUPOŁOŻENIOWEJ REGULACJI POZIOMU CIECZY W ZBIORNIKU
 Ćwiczenie SYNTEZA UKŁADU DWUPOŁOŻENIOWEJ REGULACJI POZIOMU CIECZY W ZBIORNIKU 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie studentów z pracą układu dwupołożeniowej regulacji poziomu cieczy w zbiorniku.
Ćwiczenie SYNTEZA UKŁADU DWUPOŁOŻENIOWEJ REGULACJI POZIOMU CIECZY W ZBIORNIKU 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie studentów z pracą układu dwupołożeniowej regulacji poziomu cieczy w zbiorniku.
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ. T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
 T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia") REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ Y o (s) - E(s) B(s) /T I s K p U(s) Z(s) G o (s) Y(s) T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ Y o (s) - E(s) B(s) /T I s K p U(s) Z(s) G o (s) Y(s) T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7
 Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Układy sterowania: a) otwarty, b) zamknięty w układzie zamkniętym, czyli w układzie z ujemnym sprzężeniem zwrotnym (układzie regulacji automatycznej)
 otwarty, b) zamknięty w układzie zamkniętym, czyli w układzie z ujemnym sprzężeniem zwrotnym (układzie regulacji automatycznej)") Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania; element sterujący nie otrzymuje żadnych informacji o sygnale wyjściowym y,
Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania; element sterujący nie otrzymuje żadnych informacji o sygnale wyjściowym y,
PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI
 PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI Ćwiczenie nr 4 BADANIE TERMOSTATYCZNYCH GŁOWIC GRZEJNIKOWYCH Rzeszów 2001 2 1. WPROWADZENIE Termostatyczne zawory grzejnikowe
PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI Ćwiczenie nr 4 BADANIE TERMOSTATYCZNYCH GŁOWIC GRZEJNIKOWYCH Rzeszów 2001 2 1. WPROWADZENIE Termostatyczne zawory grzejnikowe
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Elementy układu automatycznej regulacji (UAR)
") 1 Elementy układu automatycznej regulacji (UAR) Wprowadzenie W naszej szkole, specjalizacją w klasie elektronicznej jest automatyka przemysłowa. Niniejszy artykuł ma na celu przedstawienie czytelnikom
1 Elementy układu automatycznej regulacji (UAR) Wprowadzenie W naszej szkole, specjalizacją w klasie elektronicznej jest automatyka przemysłowa. Niniejszy artykuł ma na celu przedstawienie czytelnikom
Laboratorium Metod i Algorytmów Sterowania Cyfrowego
 Laboratorium Metod i Algorytmów Sterowania Cyfrowego Ćwiczenie 3 Dobór nastaw cyfrowych regulatorów rzemysłowych PID I. Cel ćwiczenia 1. Poznanie zasad doboru nastaw cyfrowych regulatorów rzemysłowych..
Laboratorium Metod i Algorytmów Sterowania Cyfrowego Ćwiczenie 3 Dobór nastaw cyfrowych regulatorów rzemysłowych PID I. Cel ćwiczenia 1. Poznanie zasad doboru nastaw cyfrowych regulatorów rzemysłowych..
Regulacja prędkości posuwu belki na prowadnicach pionowych przy wykorzystaniu sterownika Versa Max
 Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Podstawy Automatyki wykład
 Podstawy Automatyki wykład MATERIAŁY DLA STUDENTA Prowadzący: dr inż. Piotr JADWISZCZAK p.302 bud. C-6 Podstawy Automatyki Wykład 4 1. Dotychczasowe wiadomości pozwalają na: 1. Rozpoznanie i określenie
Podstawy Automatyki wykład MATERIAŁY DLA STUDENTA Prowadzący: dr inż. Piotr JADWISZCZAK p.302 bud. C-6 Podstawy Automatyki Wykład 4 1. Dotychczasowe wiadomości pozwalają na: 1. Rozpoznanie i określenie
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
Laboratorium elementów automatyki i pomiarów w technologii chemicznej
 POLITECHNIKA WROCŁAWSKA Wydziałowy Zakład Inżynierii Biomedycznej i Pomiarowej Laboratorium elementów automatyki i pomiarów w technologii chemicznej Instrukcja do ćwiczenia Regulacja dwupołożeniowa Wrocław
POLITECHNIKA WROCŁAWSKA Wydziałowy Zakład Inżynierii Biomedycznej i Pomiarowej Laboratorium elementów automatyki i pomiarów w technologii chemicznej Instrukcja do ćwiczenia Regulacja dwupołożeniowa Wrocław
(Wszystkie wyniki zapisywać na dysku Dane E:)
") Cel ćwiczenia: Zapoznanie się z budową i zasadą działania PID oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA Temperatura mikrotermostatu
Cel ćwiczenia: Zapoznanie się z budową i zasadą działania PID oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA Temperatura mikrotermostatu
Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena LABORATORIUM 4. PODSTAW 5. AUTOMATYKI
 Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena LABORATORIUM 4. PODSTAW 5. AUTOMATYKI") Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA7b 1 Badanie jednoobwodowego układu regulacji
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA7b 1 Badanie jednoobwodowego układu regulacji
Dobór typu regulatora i jego nastaw w procesie syntezy układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Robotyki
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Dobór typu regulatora i jego nastaw w procesie syntezy układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Robotyki mgr
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Dobór typu regulatora i jego nastaw w procesie syntezy układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Robotyki mgr
Urządzenia nastawcze
 POLITECHNIKA ŚLĄSKA WYDZIAŁ INŻYNIERII ŚRODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Urządzenia nastawcze Laboratorium automatyki (A-V) Opracował: dr inż. Leszek Remiorz Sprawdził:
POLITECHNIKA ŚLĄSKA WYDZIAŁ INŻYNIERII ŚRODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Urządzenia nastawcze Laboratorium automatyki (A-V) Opracował: dr inż. Leszek Remiorz Sprawdził:
PAiTM. materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż.
 PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
(Wszystkie wyniki zapisywać na dysku Dane E:)
") Cel ćwiczenia: Zapoznanie się z budową i zasadą działania PID oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA Temperatura mikrotermostatu
Cel ćwiczenia: Zapoznanie się z budową i zasadą działania PID oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. UWAGA Temperatura mikrotermostatu
KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK
 Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
USTAWNIK TOLERUJĄCY USZKODZENIA TORU SPRZĘśENIA ZWROTNEGO
 USTAWNIK TOLERUJĄCY USZKODZENIA TORU SPRZĘśENIA ZWROTNEGO Przykład zintegrowanego systemu mechatronicznego Michał Bartyś Wprowadzenie Schemat blokowy Funkcje ustawnika Model przyczynowo-skutkowy Środowisko
USTAWNIK TOLERUJĄCY USZKODZENIA TORU SPRZĘśENIA ZWROTNEGO Przykład zintegrowanego systemu mechatronicznego Michał Bartyś Wprowadzenie Schemat blokowy Funkcje ustawnika Model przyczynowo-skutkowy Środowisko
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Wykład 1. Standardowe algorytmy regulacji i sterowania
 Automatyka w Inżynierii Środowiska Wykład 1 Standardowe algorytmy regulacji i sterowania Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 15.01.2011 Obecność na wykładach: zalecana. Zakres tematyczny
Automatyka w Inżynierii Środowiska Wykład 1 Standardowe algorytmy regulacji i sterowania Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 15.01.2011 Obecność na wykładach: zalecana. Zakres tematyczny
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych
 Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Wydział Fizyki i Informatyki Stosowanej
 Wydział Fizyki i Informatyki Stosowanej Podstawy inżynierii sterowania Ćwiczenia laboratoryjne Laboratorium 3: Regulacja ciągła dr inż. Dominika Gołuńska dr inż. Szymon Łukasik 1. Regulatory ciągłe liniowe.
Wydział Fizyki i Informatyki Stosowanej Podstawy inżynierii sterowania Ćwiczenia laboratoryjne Laboratorium 3: Regulacja ciągła dr inż. Dominika Gołuńska dr inż. Szymon Łukasik 1. Regulatory ciągłe liniowe.
4. UKŁADY II RZĘDU. STABILNOŚĆ. Podstawowe wzory. Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat. Transmitancja układu zamkniętego
 4. UKŁADY II RZĘDU. STABILNOŚĆ Podstawowe wzory Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat (4.1) Transmitancja układu zamkniętego częstotliwość naturalna współczynnik tłumienia Odpowiedź
4. UKŁADY II RZĘDU. STABILNOŚĆ Podstawowe wzory Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat (4.1) Transmitancja układu zamkniętego częstotliwość naturalna współczynnik tłumienia Odpowiedź
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Automatyka i Regulacja Automatyczna SEIwE- sem.4
 Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
7. PNEUMATYCZNY REGULATOR PID WŁAŚCIWOŚCI STATYCZNE I DYNAMICZNE. Cel zadania: Zbadanie statycznych i dynamicznych właściwości przemysłowego,
 7. PNEUMATYCZNY REGULATOR PID WŁAŚCIWOŚCI STATYCZNE I DYNAMICZNE Cel zadania: Zbadanie statycznych i dynamicznych właściwości przemysłowego, pneumatycznego, analogowego regulatora PID. Poznanie działania
7. PNEUMATYCZNY REGULATOR PID WŁAŚCIWOŚCI STATYCZNE I DYNAMICZNE Cel zadania: Zbadanie statycznych i dynamicznych właściwości przemysłowego, pneumatycznego, analogowego regulatora PID. Poznanie działania
ZASTOSOWANIE PRZEKAŹNIKÓW PLC DO REALIZACJI ALGORYTMÓW STEROWANIA OGRZEWANIEM
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 92 Electrical Engineering 2017 Karol NOWAK* Grzegorz DOMBEK* Andrzej KSIĄŻKIEWICZ* Bartosz BOCHENEK* Piotr NOWACZYK* Paweł PLUTA* DOI 10.21008/j.1897-0737.2017.92.0037
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 92 Electrical Engineering 2017 Karol NOWAK* Grzegorz DOMBEK* Andrzej KSIĄŻKIEWICZ* Bartosz BOCHENEK* Piotr NOWACZYK* Paweł PLUTA* DOI 10.21008/j.1897-0737.2017.92.0037
Regulacja dwupołożeniowa.
 Politechnika Krakowska Wydział Inżynierii Elektrycznej i Komputerowej Zakład eorii Sterowania Regulacja dwupołożeniowa. Kraków Zakład eorii Sterowania (E ) Regulacja dwupołożeniowa opis ćwiczenia.. Opis
Politechnika Krakowska Wydział Inżynierii Elektrycznej i Komputerowej Zakład eorii Sterowania Regulacja dwupołożeniowa. Kraków Zakład eorii Sterowania (E ) Regulacja dwupołożeniowa opis ćwiczenia.. Opis
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
7.2.2 Zadania rozwiązane
 7.2.2 Zadania rozwiązane PRZYKŁAD 1 (DOBÓR REGULATORA) Do poniŝszego układu (rys.1) dobrać odpowiedni regulator tak, aby realizował poniŝsze załoŝenia: -likwidacja błędu statycznego, -zmniejszenie przeregulowania
7.2.2 Zadania rozwiązane PRZYKŁAD 1 (DOBÓR REGULATORA) Do poniŝszego układu (rys.1) dobrać odpowiedni regulator tak, aby realizował poniŝsze załoŝenia: -likwidacja błędu statycznego, -zmniejszenie przeregulowania
Sterowanie napędów maszyn i robotów
 Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
REGULACJA DWUPOŁOŻENIOWA
 Ćwiczenie REGULACJA DWUPOŁOŻENIOWA 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie z budową, właściwościami regulacyjnymi i działaniem dwupołożeniowych (dwustanowych) układów regulacji. W szczególności
Ćwiczenie REGULACJA DWUPOŁOŻENIOWA 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie z budową, właściwościami regulacyjnymi i działaniem dwupołożeniowych (dwustanowych) układów regulacji. W szczególności
UWAGA. Program i przebieg ćwiczenia:
 Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi