Zastosowania obliczeń inteligentnych do wyszukiwania w obrazowych bazach danych
|
|
|
- Agata Czajka
- 7 lat temu
- Przeglądów:
Transkrypt
1 Zastosowania obliczeń inteligentnych do wyszukiwania w obrazowych bazach danych Tatiana Jaworska Jaworska@ibspan.waw.pl




2 Istniejące systemy - Google



3 Istniejące systemy - Google




4 Istniejące systemy - Google




5 Istniejące systemy - Google




6 Istniejące systemy CIRES i FIDS
7 Podstawowe pojęcia Content-BasedImage Retrieval(CBIR) obrazowa baza danych moduł odpowiedzialny za przetwarzanie obrazu baza danych interfejs użytkownika GUI silnik wyszukiwania


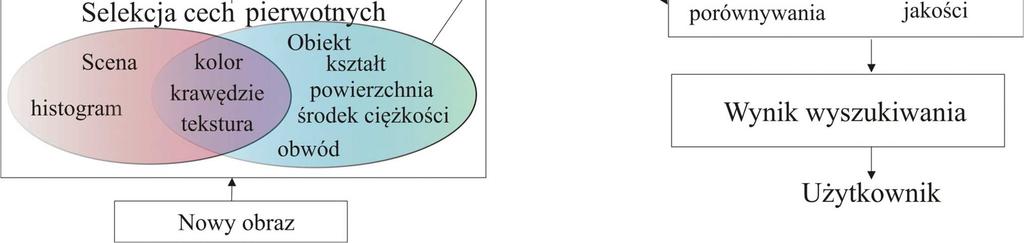
8 Schemat ogólny obrazowej bazy danych



9 Segmentacja obrazu metodą c-środków C = 5 C = 12

10 Idea algorytmu opartego na kolorach



11 Segmentacja obrazu oparta na kolorach



12 Wydzielenie obiektów

13 Tekstury a) tkanina b) kamień c) marmur d) korek Tekstura może być opisywana jako: Dwuwymiarowy proces Markowa Dwuwymiarowy histogram Korelacja transformat Fouriera tekstur z wcześniej przygotowanymi maskami
14 Dwuwymiarowe transformacje falkowe obrazu sprowadzają się do rzutowania obrazu na ustalony ortonormalny układu falek Ze względu na dyskretny charakter obrazów, będziemy się posługiwać falkami dyskretnymi. Dwuwymiarowy separowany układ falek ortonormalnych utworzony konwencjonalnie na podstawie układu jednowymiarowego ma postać: 4 ),,, (,, )} ( ), ( { Z m l k j m l k j y x ψ ψ Falki dwuwymiarowe gdzie ψ j,k (x) jest k-tą falką jednowymiarową na poziomie j-tym analizy wielorozdzielczej. Wykorzystując założenia analizy wielorozdzielczej można pokazać, że wyżej zaproponowany układ jest nadmiarowy i można go zredukować do następującego układu: gdzie: 3 ),, ( 3,, 2,, 1,, )}, ( ),, ( ),, ( { Z m k j m k j m k j m k j y x y x y x ψ ψ ψ ) ( ) ( ), ( ) ( ) ( ), ( ) ( ) ( ), ( y x y x y x y x y x y x ψ ψ ψ φ ψ ψ ψ φ ψ = = =



15 Obiekt z fakturą

16 Mapa odległości oparta na transformacji falkowej Przekrój przez detale horyzontalne dla 100-tej kolumny (falka Haara, j=1)
17 Odległości liczone na podstawie dodatnich współczynników falkowych Odległości wyznaczone dla progu odcięcia 1% wartości maksymalnej dla całej macierzy detali horyzontalnych dodatnich. Przekrój przez 100-ną kolumnę
18 Odległości liczone na podstawie ujemnych współczynników falkowych Odległości wyznaczone dla progu odcięcia 1% wartości minimalnej dla całej macierzy detali horyzontalnych ujemnych. Przekrój przez 100-ną kolumnę




19 Mapa odległości wyznaczonych na podstawie horyzontalnych współczynników dodatnich



20 Mapa odległości wyznaczonych na podstawie horyzontalnych współczynników ujemnych


21 Mapa odległości wyznaczonych na podstawie wertykalnych współczynników dodatnich



22 Mapa odległości wyznaczonych na podstawie wertykalnych współczynników ujemnych


23 Parametry tekstury Na podstawie wykonanych map odległości można oszacować rozmiar pionowy dachówki na falek czyli pikseli, natomiast rozmiar pionowy na and falek czyli pikseli.
24 Różne deskryptory kształtu Definicja Obiekt Sposób kodowania Kod 2 2 ] ) ( [ ] ) ( [ ) ( y y x x r + = θ θ θ = = )exp ( 1 N n N n j r N a θ θ π θ
25 Wielomiany Zernike a Ciąg wielomianów ortogonalnych nad dyskiem jednostkowym,, 0,1 V pq (r,θ) = 2 r = x + y 2 gdzie: jest długością wektora od środka dysku do punktu (x,y). Wielomiany o wartościach rzeczywistych gdzie p q jest parzyste, 0 q p i p 0. Niech s (p k)/2, wtedy wielomiany mogą być reprezentowane jako

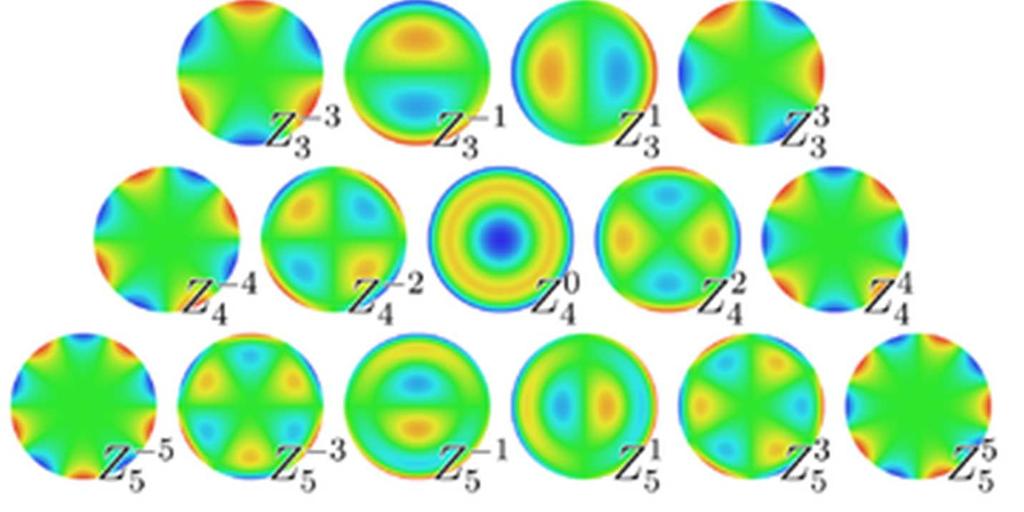
26 Funkcje bazowe Zernike a
 gdzie V * pq ( x, y) = Vp, q (")
27 Momenty Zernike a Wtedy B pqk są współczynnikami tego wielomianu: Dwuwymiarowe momenty Zernike a rzędu p z powtórzeniami q dla obrazu o funkcji intensywności f(x,y) gdzie V * pq ( x, y) = Vp, q ( x, y)
28 Właściwości momentów Zernike a 1. Tak zdefiniowane momenty Zernike a są niezmiennicze względem rotacji. 2. Aby uzyskać niezmienniczość względem przesunięcia trzeba centrum obiektu umieścić w środku układu współrzędnych. 3. Natomiast niezmienniczość skali uzyskujemy poprzez skalowanie obiektu.



29 Przykład dopasowania dwóch obiektów na podstawie pierwszych 10 momentów Zernike a



30 Struktura bazy danych - Oracle
31 Biblioteka wzorców Biblioteka wzorców zawiera informację o wzorcowych wektorach cech obiektu graficznego, zakresie wartości i wagach przypisanych tym wartościom. Dla każdego obiektu mamy więc wzorcowy wektor cech P k z wagami µ ( ) [0,1] P f i k Każdy obiekt jest przyporządkowywany do określonej klasy z biblioteki wzorców poprzez szukanie najmniejszej odległości pomiędzy wektorami O i P 1 k r m m d( FO, Pk ) = µ P ( fi ) FO ( fi ) Pk ( f k i ) i= 1 Na tej podstawie każdy obiekt otrzymuje etykietę L k








32 Klasyfikacja obiektów ID=4 ID=31 ID=9 ID=25 ID=3 ID=24
33 Opis rozkładu przestrzennego obiektów graficznych na obrazie z użyciem analizy składowych głównych 1 W bazie danych mamy M klas obiektów oznaczonych etykietami L 1, L 2,, L M. Możemy zatem określić sygnaturę obrazu I i jako następujący wektor: Signature (I i ) = [nobc i1, nobc i2,, nobc im ] gdzie: nobc ik oznacza liczbę obiektów o ij o klasie L k w danym obrazie I i. Poza tą informacją rozpatrujemy też wzajemne położenie obiektów w obrazie w oparciu o analizę składowych głównych (PCA).
34 Opis rozkładu przestrzennego obiektów graficznych na obrazie z użyciem analizy składowych głównych 2 Porównujemy dwa obrazy składające się ze zbioru obiektów I i = {o i1, o i2,, o in } opisanych przez środki ciężkości C ij = (x ij, y ij ) i klasę L ij Formalnie obraz I składa się z n obiektów i k klas gdzie k N, ponieważ kilka obiektów może być tej samej klasy. Jako linię odniesienia do liczenia kąta pomiędzy obiektami wybieramy największą odległość między centroidami obiektów istniejącą na obrazie dist (C p,c q ) = max {dist (C i,c j ) i,j {1,2,,k} and L i L j } Następnie od tej linii liczymy kąty θ ij pomiędzy kolejnymi środkami ciężkości. W ten sposób metoda jest niezmiennicza względem obrotu.
/2 takich trójek dla obrazów o n obiektach.")
35 Określenie kąta między obiektami przy wyznaczaniu macierzy do analizy składowych głównych 3 Otrzymujemy więc trójki (L i, L j, θ ij ), gdzie kąt jest liczony względem linii odniesienia. Dostajemy T = n(n-1)/2 takich trójek dla obrazów o n obiektach. Następnie poszukujemy wektorów własnych PCV i macierzy kowariancji zgodnie z metodą analizy składowych głównych.




36 Graficzne zapytanie do bazy poprzez GUI




37 Graficzne zapytanie do bazy poprzez GUI
38 Metoda wyszukiwania slajd 1 Obraz z bazy możemy oznaczyć jako I b = {o 1, o 2,, o }. Niech zapytaniem będzie obraz I q taki, że I q = {o 1, o 2,, o }. Aby odpowiedzieć na to zapytanie porównujemy z nim każdy obraz I b z bazy w następujący sposób. Najpierw określamy podobieństwo sim sgn pomiędzy I q i I b licząc odległość między sygnaturami obrazów: sim sgn (I q, I b ) = d (sgn q, sgn b ) np. analogicznie do liczenia termów w dokumentach tekstowych 0, 0 TF,, 0 Wtedy odległość tych wektorów można już policzyć metryką euklidesową. Jeśli to podobieństwo jest mniejsze od założonego progu wtedy obraz I b jest odrzucany z dalszych porównań.
39 Metoda wyszukiwania slajd 2 Jeśli to podobieństwo jest większe, to przechodzimy do następnego etapu i znajdujemy podobieństwo sim PCV między rozkładem przestrzennym obiektów w obrazach I q i I b licząc odległość euklidesową między wektorami PCV: sim 3 q b = b q 2 PCV ( I, I ) 1 ( PCVi PCVi ) i= 1 Jeśli z kolei to podobieństwo okaże się mniejsze od wartości progowej obraz I b jest odrzucany. W przeciwnym razie, przechodzimy do następnego kroku, w którym liczymy podobieństwo poszczególnych obiektów wchodzących w skład obu obrazów I q i I b. Dla każdego obiektu o wchodzącego w skład obrazu Iq, znajdujemy najbardziej podobny obiekt w tej samej klasie na obrazie I b.
 1 ( F oil F o jl ) b j")

40 Dopasowanie parami z eliminacją Dla każdego obiektu o L można obliczyć między obiektami: q b = q b simob ( oi, o j ) 1 ( F oil F o jl ) b j gdzie: l jest numerem cechy w wektorze cech F O poszczególnych obiektów. Może zajść jednak sytuacja przedstawiona na rysunku: q i l q sim ob ( o i, o 2 b j )
41 Koncepcja wyszukiwania slajd 3 Z powyższego algorytmu dostajemy wektor podobieństw pomiędzy zapytaniem I q i obrazem I b : sim( I q, I b ) = sim sim gdzie: n jest liczbą obiektów reprezentujących obraz I q. Porządkujemy obrazy I b względem zapytania I q, q b na podstawie ( o i, o ) sim ob j ob ob ( o M ( o q 1 q n, o, o b 1 b n ) )
42 Proponowane zagadnienia Identyfikacja obiektów na podstawie klasy wzorców Opracowanie reguł ułatwiających klasyfikację obiektów Porównywanie wielowymiarowych wzorców Implementacja miękkich metod wyszukiwania Przetestowanie różnych miar podobieństwa
43 Literatura Russ J. C.: The Image Processing Handbook, wyd. 2, CRC Press, Wojnar L., Kurzydłowski K., Szala J.: Praktyka analizy obrazu,polskie Towarzystwo Stereologiczne, Kraków, Artificial intelligence for Maximizing Content Based Image Retrieval, red. Zongmin Ma, Information Science Reference, NY, Deb S.: Multimedia Systems and Content-Based Image retrieval, Idea Group Publishing, Melbourne, Jaworska T., Object extraction as a basic process for content-based image retrieval (CBIR) system, Opto-Electronics Review, Vol. 15, Nr. 4, str , Jaworska T., A Search-Engine Concept Based on Multi-Feature Vectors and Spatial Relationship,LECTURE NOTES IN ARTIFICIAL INTELLIGENCE nr 7022, str , 2011.
Przetwarzanie obrazu
 Przetwarzanie obrazu Przegląd z uwzględnieniem obrazowej bazy danych Tatiana Jaworska Jaworska@ibspan.waw.pl www.ibspan.waw.pl/~jaworska Umiejscowienie przetwarzania obrazu Plan prezentacji Pojęcia podstawowe
Przetwarzanie obrazu Przegląd z uwzględnieniem obrazowej bazy danych Tatiana Jaworska Jaworska@ibspan.waw.pl www.ibspan.waw.pl/~jaworska Umiejscowienie przetwarzania obrazu Plan prezentacji Pojęcia podstawowe
Przetwarzanie obrazu
 Przetwarzanie obrazu Przegląd z uwzględnieniem obrazowej bazy danych Tatiana Jaworska Jaworska@ibspan.waw.pl www.ibspan.waw.pl/~jaworska Umiejscowienie przetwarzania obrazu Plan prezentacji Pojęcia podstawowe
Przetwarzanie obrazu Przegląd z uwzględnieniem obrazowej bazy danych Tatiana Jaworska Jaworska@ibspan.waw.pl www.ibspan.waw.pl/~jaworska Umiejscowienie przetwarzania obrazu Plan prezentacji Pojęcia podstawowe
KORELACJA MIĘDZY OBIEKTAMI GRAFICZNYMI JAKO ASPEKT WYSZUKIWANIA ICH W OBRAZOWEJ BAZIE DANYCH
 KORELACJA MIĘDZY OBIEKTAMI GRAFICZNYMI JAKO ASPEKT WYSZUKIWANIA ICH W OBRAZOWEJ BAZIE DANYCH Tatiana Jaworska e-mail: Tatiana.Jaworska@ibspan.waw.pl Instytut Badań Systemowych, Polska Akademia Nauk, ul.
KORELACJA MIĘDZY OBIEKTAMI GRAFICZNYMI JAKO ASPEKT WYSZUKIWANIA ICH W OBRAZOWEJ BAZIE DANYCH Tatiana Jaworska e-mail: Tatiana.Jaworska@ibspan.waw.pl Instytut Badań Systemowych, Polska Akademia Nauk, ul.
Zastosowania obliczeń inteligentnych do wyszukiwania w obrazowych bazach danych
 Zastosowania obliczeń inteligentnych do wyszukiwania w obrazowych bazach danych Tatiana Jaworska Jaworska@ibspan.waw.pl www.ibspan.waw.pl/~jaworska Istniejące systemy - Google Istniejące systemy - Google
Zastosowania obliczeń inteligentnych do wyszukiwania w obrazowych bazach danych Tatiana Jaworska Jaworska@ibspan.waw.pl www.ibspan.waw.pl/~jaworska Istniejące systemy - Google Istniejące systemy - Google
1. Wprowadzenie. 2. Struktura obrazowej bazy danych
 WYZNACZANIE FAKTUR WE WSTĘPNYM PRZYGOTOWANIU OBRAZÓW DLA CELÓW OBRAZOWEJ BAZY DANYCH Tatiana Jaworska Instytut Badań Systemowych, Polska Akademia Nauk, ul. Newelska 6, 01-447 Warszawa, W artykule przedstawiono
WYZNACZANIE FAKTUR WE WSTĘPNYM PRZYGOTOWANIU OBRAZÓW DLA CELÓW OBRAZOWEJ BAZY DANYCH Tatiana Jaworska Instytut Badań Systemowych, Polska Akademia Nauk, ul. Newelska 6, 01-447 Warszawa, W artykule przedstawiono
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Laboratorium JAVA Zadanie nr 2 Rozpoznawanie liter autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się z problemem klasyfikacji
Metody systemowe i decyzyjne w informatyce Laboratorium JAVA Zadanie nr 2 Rozpoznawanie liter autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się z problemem klasyfikacji
Akwizycja i przetwarzanie sygnałów cyfrowych
 Akwizycja i przetwarzanie sygnałów cyfrowych Instytut Teleinformatyki ITI PK Kraków 21 luty 2011 Analiza czas - częstotliwość analiza częstotliwościowa: problem dla sygnału niestacjonarnego zwykła transformata
Akwizycja i przetwarzanie sygnałów cyfrowych Instytut Teleinformatyki ITI PK Kraków 21 luty 2011 Analiza czas - częstotliwość analiza częstotliwościowa: problem dla sygnału niestacjonarnego zwykła transformata
2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I
![2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I](/thumbs/88/115575416.jpg "2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I") Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Cyfrowe przetwarzanie i kompresja danych
 Cyfrowe przetwarzanie i kompresja danych dr inż.. Wojciech Zając Wykład 5. Dyskretna transformata falkowa Schemat systemu transmisji danych wizyjnych Źródło danych Przetwarzanie Przesył Przetwarzanie Prezentacja
Cyfrowe przetwarzanie i kompresja danych dr inż.. Wojciech Zając Wykład 5. Dyskretna transformata falkowa Schemat systemu transmisji danych wizyjnych Źródło danych Przetwarzanie Przesył Przetwarzanie Prezentacja
Transformaty. Kodowanie transformujace
 Transformaty. Kodowanie transformujace Kodowanie i kompresja informacji - Wykład 10 10 maja 2009 Szeregi Fouriera Każda funkcję okresowa f (t) o okresie T można zapisać jako f (t) = a 0 + a n cos nω 0
Transformaty. Kodowanie transformujace Kodowanie i kompresja informacji - Wykład 10 10 maja 2009 Szeregi Fouriera Każda funkcję okresowa f (t) o okresie T można zapisać jako f (t) = a 0 + a n cos nω 0
Agnieszka Nowak Brzezińska
 Agnieszka Nowak Brzezińska jeden z algorytmów regresji nieparametrycznej używanych w statystyce do prognozowania wartości pewnej zmiennej losowej. Może również byd używany do klasyfikacji. - Założenia
Agnieszka Nowak Brzezińska jeden z algorytmów regresji nieparametrycznej używanych w statystyce do prognozowania wartości pewnej zmiennej losowej. Może również byd używany do klasyfikacji. - Założenia
WEKTORY I WARTOŚCI WŁASNE MACIERZY. = λ c (*) problem przybliżonego rozwiązania zagadnienia własnego dla operatorów w mechanice kwantowej
 problem przybliżonego rozwiązania zagadnienia własnego dla operatorów w mechanice kwantowej") WEKTORY I WARTOŚCI WŁASNE MACIERZY Ac λ c (*) ( A λi) c nietrywialne rozwiązanie gdy det A λi problem przybliżonego rozwiązania zagadnienia własnego dla operatorów w mechanice kwantowej A - macierzowa
WEKTORY I WARTOŚCI WŁASNE MACIERZY Ac λ c (*) ( A λi) c nietrywialne rozwiązanie gdy det A λi problem przybliżonego rozwiązania zagadnienia własnego dla operatorów w mechanice kwantowej A - macierzowa
Hierarchiczna analiza skupień
 Hierarchiczna analiza skupień Cel analizy Analiza skupień ma na celu wykrycie w zbiorze obserwacji klastrów, czyli rozłącznych podzbiorów obserwacji, wewnątrz których obserwacje są sobie w jakimś określonym
Hierarchiczna analiza skupień Cel analizy Analiza skupień ma na celu wykrycie w zbiorze obserwacji klastrów, czyli rozłącznych podzbiorów obserwacji, wewnątrz których obserwacje są sobie w jakimś określonym
EKSTRAKCJA CECH TWARZY ZA POMOCĄ TRANSFORMATY FALKOWEJ
 Janusz Bobulski Instytut Informatyki Teoretycznej i Stosowanej Politechnika Częstochowska ul. Dąbrowskiego 73 42-200 Częstochowa januszb@icis.pcz.pl EKSTRAKCJA CECH TWARZY ZA POMOCĄ TRANSFORMATY FALKOWEJ
Janusz Bobulski Instytut Informatyki Teoretycznej i Stosowanej Politechnika Częstochowska ul. Dąbrowskiego 73 42-200 Częstochowa januszb@icis.pcz.pl EKSTRAKCJA CECH TWARZY ZA POMOCĄ TRANSFORMATY FALKOWEJ
10. Redukcja wymiaru - metoda PCA
 Algorytmy rozpoznawania obrazów 10. Redukcja wymiaru - metoda PCA dr inż. Urszula Libal Politechnika Wrocławska 2015 1 1. PCA Analiza składowych głównych: w skrócie nazywana PCA (od ang. Principle Component
Algorytmy rozpoznawania obrazów 10. Redukcja wymiaru - metoda PCA dr inż. Urszula Libal Politechnika Wrocławska 2015 1 1. PCA Analiza składowych głównych: w skrócie nazywana PCA (od ang. Principle Component
Algebra Liniowa 2 (INF, TIN), MAP1152 Lista zadań
, MAP1152 Lista zadań") Algebra Liniowa 2 (INF, TIN), MAP1152 Lista zadań Przekształcenia liniowe, diagonalizacja macierzy 1. Podano współrzędne wektora v w bazie B. Znaleźć współrzędne tego wektora w bazie B, gdy: a) v = (1,
Algebra Liniowa 2 (INF, TIN), MAP1152 Lista zadań Przekształcenia liniowe, diagonalizacja macierzy 1. Podano współrzędne wektora v w bazie B. Znaleźć współrzędne tego wektora w bazie B, gdy: a) v = (1,
WYKŁAD 12. Analiza obrazu Wyznaczanie parametrów ruchu obiektów
 WYKŁAD 1 Analiza obrazu Wyznaczanie parametrów ruchu obiektów Cel analizy obrazu: przedstawienie każdego z poszczególnych obiektów danego obrazu w postaci wektora cech dla przeprowadzenia procesu rozpoznania
WYKŁAD 1 Analiza obrazu Wyznaczanie parametrów ruchu obiektów Cel analizy obrazu: przedstawienie każdego z poszczególnych obiektów danego obrazu w postaci wektora cech dla przeprowadzenia procesu rozpoznania
Formy kwadratowe. Mirosław Sobolewski. Wydział Matematyki, Informatyki i Mechaniki UW. wykład z algebry liniowej Warszawa, styczeń 2009
 Formy kwadratowe Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW wykład z algebry liniowej Warszawa, styczeń 2009 Mirosław Sobolewski (UW) Warszawa, 2009 1 / 15 Definicja Niech V, W,
Formy kwadratowe Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW wykład z algebry liniowej Warszawa, styczeń 2009 Mirosław Sobolewski (UW) Warszawa, 2009 1 / 15 Definicja Niech V, W,
Kodowanie transformujace. Kompresja danych. Tomasz Jurdziński. Wykład 11: Transformaty i JPEG
 Tomasz Wykład 11: Transformaty i JPEG Idea kodowania transformujacego Etapy kodowania 1 Wektor danych x 0,...,x N 1 przekształcamy (odwracalnie!) na wektor c 0,...,c N 1, tak aby: energia była skoncentrowana
Tomasz Wykład 11: Transformaty i JPEG Idea kodowania transformujacego Etapy kodowania 1 Wektor danych x 0,...,x N 1 przekształcamy (odwracalnie!) na wektor c 0,...,c N 1, tak aby: energia była skoncentrowana
ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ
 ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ WSHE, O/K-CE 10. Homomorfizmy Definicja 1. Niech V, W będą dwiema przestrzeniami liniowymi nad ustalonym ciałem, odwzorowanie ϕ : V W nazywamy homomorfizmem
ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ WSHE, O/K-CE 10. Homomorfizmy Definicja 1. Niech V, W będą dwiema przestrzeniami liniowymi nad ustalonym ciałem, odwzorowanie ϕ : V W nazywamy homomorfizmem
W poszukiwaniu sensu w świecie widzialnym
 W poszukiwaniu sensu w świecie widzialnym Andrzej Śluzek Nanyang Technological University Singapore Uniwersytet Mikołaja Kopernika Toruń AGH, Kraków, 28 maja 2010 1 Podziękowania Przedstawione wyniki powstały
W poszukiwaniu sensu w świecie widzialnym Andrzej Śluzek Nanyang Technological University Singapore Uniwersytet Mikołaja Kopernika Toruń AGH, Kraków, 28 maja 2010 1 Podziękowania Przedstawione wyniki powstały
Kolejny krok iteracji polega na tym, że przechodzimy do następnego wierzchołka, znajdującego się na jednej krawędzi z odnalezionym już punktem, w
 Metoda Simpleks Jak wiadomo, problem PL z dowolną liczbą zmiennych można rozwiązać wyznaczając wszystkie wierzchołkowe punkty wielościanu wypukłego, a następnie porównując wartości funkcji celu w tych
Metoda Simpleks Jak wiadomo, problem PL z dowolną liczbą zmiennych można rozwiązać wyznaczając wszystkie wierzchołkowe punkty wielościanu wypukłego, a następnie porównując wartości funkcji celu w tych
Wektory i wartości własne
 Treść wykładu Podprzestrzenie niezmiennicze... Twierdzenie Cayley Hamiltona Podprzestrzenie niezmiennicze Definicja Niech f : V V będzie przekształceniem liniowym. Podprzestrzeń W V nazywamy niezmienniczą
Treść wykładu Podprzestrzenie niezmiennicze... Twierdzenie Cayley Hamiltona Podprzestrzenie niezmiennicze Definicja Niech f : V V będzie przekształceniem liniowym. Podprzestrzeń W V nazywamy niezmienniczą
i = [ 0] j = [ 1] k = [ 0]
![i = [ 0] j = [ 1] k = [ 0]](/thumbs/70/62901734.jpg "i = [ 0] j = [ 1] k = [ 0]") Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
1 Formy hermitowskie. GAL (Informatyka) Wykład - formy hermitowskie. Paweł Bechler
 Wykład - formy hermitowskie. Paweł Bechler") GAL (Informatyka) Wykład - formy hermitowskie Wersja z dnia 23 stycznia 2014 Paweł Bechler 1 Formy hermitowskie Niech X oznacza przestrzeń liniową nad ciałem K. Definicja 1. Funkcję φ : X X K nazywamy
GAL (Informatyka) Wykład - formy hermitowskie Wersja z dnia 23 stycznia 2014 Paweł Bechler 1 Formy hermitowskie Niech X oznacza przestrzeń liniową nad ciałem K. Definicja 1. Funkcję φ : X X K nazywamy
Cyfrowe przetwarzanie obrazów i sygnałów Wykład 7 AiR III
 1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
Stosowana Analiza Regresji
 Stosowana Analiza Regresji Wykład VIII 30 Listopada 2011 1 / 18 gdzie: X : n p Q : n n R : n p Zał.: n p. X = QR, - macierz eksperymentu, - ortogonalna, - ma zera poniżej głównej diagonali. [ R1 X = Q
Stosowana Analiza Regresji Wykład VIII 30 Listopada 2011 1 / 18 gdzie: X : n p Q : n n R : n p Zał.: n p. X = QR, - macierz eksperymentu, - ortogonalna, - ma zera poniżej głównej diagonali. [ R1 X = Q
Analiza skupień. Analiza Skupień W sztucznej inteligencji istotną rolę ogrywają algorytmy grupowania
 Analiza skupień W sztucznej inteligencji istotną rolę ogrywają algorytmy grupowania Analiza Skupień Elementy składowe procesu grupowania obiekt Ekstrakcja cech Sprzężenie zwrotne Grupowanie klastry Reprezentacja
Analiza skupień W sztucznej inteligencji istotną rolę ogrywają algorytmy grupowania Analiza Skupień Elementy składowe procesu grupowania obiekt Ekstrakcja cech Sprzężenie zwrotne Grupowanie klastry Reprezentacja
Macierze. Rozdział Działania na macierzach
 Rozdział 5 Macierze Funkcję, która każdej parze liczb naturalnych (i, j) (i 1,..., n; j 1,..., m) przyporządkowuje dokładnie jedną liczbę a ij F, gdzie F R lub F C, nazywamy macierzą (rzeczywistą, gdy
Rozdział 5 Macierze Funkcję, która każdej parze liczb naturalnych (i, j) (i 1,..., n; j 1,..., m) przyporządkowuje dokładnie jedną liczbę a ij F, gdzie F R lub F C, nazywamy macierzą (rzeczywistą, gdy
Reprezentacja i analiza obszarów
 Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek ciężkości ułożenie przestrzenne momenty wyższych rzędów promienie max-min centryczność
Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek ciężkości ułożenie przestrzenne momenty wyższych rzędów promienie max-min centryczność
Sztuczna inteligencja : Algorytm KNN
 Instytut Informatyki Uniwersytetu Śląskiego 23 kwietnia 2012 1 Algorytm 1 NN 2 Algorytm knn 3 Zadania Klasyfikacja obiektów w oparciu o najbliższe obiekty: Algorytm 1-NN - najbliższego sąsiada. Parametr
Instytut Informatyki Uniwersytetu Śląskiego 23 kwietnia 2012 1 Algorytm 1 NN 2 Algorytm knn 3 Zadania Klasyfikacja obiektów w oparciu o najbliższe obiekty: Algorytm 1-NN - najbliższego sąsiada. Parametr
Elementy modelowania matematycznego
 Elementy modelowania matematycznego Modelowanie algorytmów klasyfikujących. Podejście probabilistyczne. Naiwny klasyfikator bayesowski. Modelowanie danych metodą najbliższych sąsiadów. Jakub Wróblewski
Elementy modelowania matematycznego Modelowanie algorytmów klasyfikujących. Podejście probabilistyczne. Naiwny klasyfikator bayesowski. Modelowanie danych metodą najbliższych sąsiadów. Jakub Wróblewski
2. Próbkowanie Sygnały okresowe (16). Trygonometryczny szereg Fouriera (17). Częstotliwość Nyquista (20).
. Trygonometryczny szereg Fouriera (17). Częstotliwość Nyquista (20).") SPIS TREŚCI ROZDZIAŁ I SYGNAŁY CYFROWE 9 1. Pojęcia wstępne Wiadomości, informacje, dane, sygnały (9). Sygnał jako nośnik informacji (11). Sygnał jako funkcja (12). Sygnał analogowy (13). Sygnał cyfrowy
SPIS TREŚCI ROZDZIAŁ I SYGNAŁY CYFROWE 9 1. Pojęcia wstępne Wiadomości, informacje, dane, sygnały (9). Sygnał jako nośnik informacji (11). Sygnał jako funkcja (12). Sygnał analogowy (13). Sygnał cyfrowy
Wektory i wartości własne
 Treść wykładu Podprzestrzenie niezmiennicze Podprzestrzenie niezmiennicze... Twierdzenie Cayley Hamiltona Podprzestrzenie niezmiennicze Definicja Niech f : V V będzie przekształceniem liniowym. Podprzestrzeń
Treść wykładu Podprzestrzenie niezmiennicze Podprzestrzenie niezmiennicze... Twierdzenie Cayley Hamiltona Podprzestrzenie niezmiennicze Definicja Niech f : V V będzie przekształceniem liniowym. Podprzestrzeń
P R Z E T W A R Z A N I E S Y G N A Ł Ó W B I O M E T R Y C Z N Y C H
 W O J S K O W A A K A D E M I A T E C H N I C Z N A W Y D Z I A Ł E L E K T R O N I K I Drukować dwustronnie P R Z E T W A R Z A N I E S Y G N A Ł Ó W B I O M E T R Y C Z N Y C H Grupa... Data wykonania
W O J S K O W A A K A D E M I A T E C H N I C Z N A W Y D Z I A Ł E L E K T R O N I K I Drukować dwustronnie P R Z E T W A R Z A N I E S Y G N A Ł Ó W B I O M E T R Y C Z N Y C H Grupa... Data wykonania
MODELOWANIE PRZESTRZENI ZA POMOCĄ MULTIILOCZYNÓW WEKTORÓW
 Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechniki Łódzkiej MODELOWANIE PRZESTRZENI ZA POMOCĄ MULTIILOCZYNÓW WEKTORÓW Praca zawiera opis kształtowania przestrzeni n-wymiarowej, definiowania orientacji
Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechniki Łódzkiej MODELOWANIE PRZESTRZENI ZA POMOCĄ MULTIILOCZYNÓW WEKTORÓW Praca zawiera opis kształtowania przestrzeni n-wymiarowej, definiowania orientacji
Detekcja kształtów i wybrane cechy obrazów konturowych
 Informatyka, S2 sem. Letni, 2013/2014, wykład#7 Detekcja kształtów i wybrane cechy obrazów konturowych dr inż. Paweł Forczmański Katedra Systemów Multimedialnych, Wydział Informatyki ZUT 1 / 61 Proces
Informatyka, S2 sem. Letni, 2013/2014, wykład#7 Detekcja kształtów i wybrane cechy obrazów konturowych dr inż. Paweł Forczmański Katedra Systemów Multimedialnych, Wydział Informatyki ZUT 1 / 61 Proces
Data Mining Wykład 9. Analiza skupień (grupowanie) Grupowanie hierarchiczne O-Cluster. Plan wykładu. Sformułowanie problemu
 Grupowanie hierarchiczne O-Cluster. Plan wykładu. Sformułowanie problemu") Data Mining Wykład 9 Analiza skupień (grupowanie) Grupowanie hierarchiczne O-Cluster Plan wykładu Wprowadzanie Definicja problemu Klasyfikacja metod grupowania Grupowanie hierarchiczne Sformułowanie problemu
Data Mining Wykład 9 Analiza skupień (grupowanie) Grupowanie hierarchiczne O-Cluster Plan wykładu Wprowadzanie Definicja problemu Klasyfikacja metod grupowania Grupowanie hierarchiczne Sformułowanie problemu
Akwizycja i przetwarzanie sygnałów cyfrowych
 Akwizycja i przetwarzanie sygnałów cyfrowych Instytut Teleinformatyki ITI PK Kraków 21 luty 2011 Reprezentacje sygnału Jak reprezentujemy sygnał: wybieramy sygnały wzorcowe (bazę) rozwijamy sygnał w wybranej
Akwizycja i przetwarzanie sygnałów cyfrowych Instytut Teleinformatyki ITI PK Kraków 21 luty 2011 Reprezentacje sygnału Jak reprezentujemy sygnał: wybieramy sygnały wzorcowe (bazę) rozwijamy sygnał w wybranej
Cyfrowe przetwarzanie obrazów i sygnałów Wykład 9 AiR III
 1 Na podstawie materiałów autorstwa dra inż. Marka Wnuka. Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania
1 Na podstawie materiałów autorstwa dra inż. Marka Wnuka. Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania
Zaawansowane metody numeryczne
 Wykład 11 Ogólna postać metody iteracyjnej Definicja 11.1. (metoda iteracyjna rozwiązywania układów równań) Metodą iteracyjną rozwiązywania { układów równań liniowych nazywamy ciąg wektorów zdefiniowany
Wykład 11 Ogólna postać metody iteracyjnej Definicja 11.1. (metoda iteracyjna rozwiązywania układów równań) Metodą iteracyjną rozwiązywania { układów równań liniowych nazywamy ciąg wektorów zdefiniowany
Wykład 12 i 13 Macierz w postaci kanonicznej Jordana , 0 A 2
 Wykład 12 i 13 Macierz w postaci kanonicznej Jordana Niech A - macierz kwadratowa stopnia n Jak obliczyć np A 100? a 11 0 0 0 a 22 0 Jeśli A jest macierzą diagonalną tzn A =, to Ak = 0 0 a nn Niech B =
Wykład 12 i 13 Macierz w postaci kanonicznej Jordana Niech A - macierz kwadratowa stopnia n Jak obliczyć np A 100? a 11 0 0 0 a 22 0 Jeśli A jest macierzą diagonalną tzn A =, to Ak = 0 0 a nn Niech B =
5. Analiza dyskryminacyjna: FLD, LDA, QDA
 Algorytmy rozpoznawania obrazów 5. Analiza dyskryminacyjna: FLD, LDA, QDA dr inż. Urszula Libal Politechnika Wrocławska 2015 1 1. Liniowe funkcje dyskryminacyjne Liniowe funkcje dyskryminacyjne mają ogólną
Algorytmy rozpoznawania obrazów 5. Analiza dyskryminacyjna: FLD, LDA, QDA dr inż. Urszula Libal Politechnika Wrocławska 2015 1 1. Liniowe funkcje dyskryminacyjne Liniowe funkcje dyskryminacyjne mają ogólną
Klasyfikatory: k-nn oraz naiwny Bayesa. Agnieszka Nowak Brzezińska Wykład IV
 Klasyfikatory: k-nn oraz naiwny Bayesa Agnieszka Nowak Brzezińska Wykład IV Naiwny klasyfikator Bayesa Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną
Klasyfikatory: k-nn oraz naiwny Bayesa Agnieszka Nowak Brzezińska Wykład IV Naiwny klasyfikator Bayesa Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną
Lista. Przestrzenie liniowe. Zadanie 1 Sprawdź, czy (V, +, ) jest przestrzenią liniową nadr :
 jest przestrzenią liniową nadr :") Lista Przestrzenie liniowe Zadanie 1 Sprawdź, czy (V, +, ) jest przestrzenią liniową nadr : V = R[X], zbiór wielomianów jednej zmiennej o współczynnikach rzeczywistych, wraz ze standardowym dodawaniem
Lista Przestrzenie liniowe Zadanie 1 Sprawdź, czy (V, +, ) jest przestrzenią liniową nadr : V = R[X], zbiór wielomianów jednej zmiennej o współczynnikach rzeczywistych, wraz ze standardowym dodawaniem
Przestrzeń unitarna. Jacek Kłopotowski. 23 października Katedra Matematyki i Ekonomii Matematycznej SGH
 Katedra Matematyki i Ekonomii Matematycznej SGH 23 października 2018 Definicja iloczynu skalarnego Definicja Iloczynem skalarnym w przestrzeni liniowej R n nazywamy odwzorowanie ( ) : R n R n R spełniające
Katedra Matematyki i Ekonomii Matematycznej SGH 23 października 2018 Definicja iloczynu skalarnego Definicja Iloczynem skalarnym w przestrzeni liniowej R n nazywamy odwzorowanie ( ) : R n R n R spełniające
Prawdopodobieństwo i statystyka
 Wykład XV: Zagadnienia redukcji wymiaru danych 2 lutego 2015 r. Standaryzacja danych Standaryzacja danych Własności macierzy korelacji Definicja Niech X będzie zmienną losową o skończonym drugim momencie.
Wykład XV: Zagadnienia redukcji wymiaru danych 2 lutego 2015 r. Standaryzacja danych Standaryzacja danych Własności macierzy korelacji Definicja Niech X będzie zmienną losową o skończonym drugim momencie.
METODY CHEMOMETRYCZNE W IDENTYFIKACJI ŹRÓDEŁ POCHODZENIA
 METODY CHEMOMETRYCZNE W IDENTYFIKACJI ŹRÓDEŁ POCHODZENIA AMFETAMINY Waldemar S. Krawczyk Centralne Laboratorium Kryminalistyczne Komendy Głównej Policji, Warszawa (praca obroniona na Wydziale Chemii Uniwersytetu
METODY CHEMOMETRYCZNE W IDENTYFIKACJI ŹRÓDEŁ POCHODZENIA AMFETAMINY Waldemar S. Krawczyk Centralne Laboratorium Kryminalistyczne Komendy Głównej Policji, Warszawa (praca obroniona na Wydziale Chemii Uniwersytetu
Reprezentacja i analiza obszarów
 Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek cięŝkości ułoŝenie przestrzenne momenty wyŝszych rzędów promienie max-min centryczność
Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek cięŝkości ułoŝenie przestrzenne momenty wyŝszych rzędów promienie max-min centryczność
Co to jest wektor? Jest to obiekt posiadający: moduł (długość), kierunek wraz ze zwrotem.
, kierunek wraz ze zwrotem.") 1 Wektory Co to jest wektor? Jest to obiekt posiadający: moduł (długość), kierunek wraz ze zwrotem. 1.1 Dodawanie wektorów graficzne i algebraiczne. Graficzne - metoda równoległoboku. Sprowadzamy wektory
1 Wektory Co to jest wektor? Jest to obiekt posiadający: moduł (długość), kierunek wraz ze zwrotem. 1.1 Dodawanie wektorów graficzne i algebraiczne. Graficzne - metoda równoległoboku. Sprowadzamy wektory
Statystyka i eksploracja danych
 Wykład XII: Zagadnienia redukcji wymiaru danych 12 maja 2014 Definicja Niech X będzie zmienną losową o skończonym drugim momencie. Standaryzacją zmiennej X nazywamy zmienną losową Z = X EX Var (X ). Definicja
Wykład XII: Zagadnienia redukcji wymiaru danych 12 maja 2014 Definicja Niech X będzie zmienną losową o skończonym drugim momencie. Standaryzacją zmiennej X nazywamy zmienną losową Z = X EX Var (X ). Definicja
Przekształcenia liniowe
 Przekształcenia liniowe Zadania Które z następujących przekształceń są liniowe? (a) T : R 2 R 2, T (x, x 2 ) = (2x, x x 2 ), (b) T : R 2 R 2, T (x, x 2 ) = (x + 3x 2, x 2 ), (c) T : R 2 R, T (x, x 2 )
Przekształcenia liniowe Zadania Które z następujących przekształceń są liniowe? (a) T : R 2 R 2, T (x, x 2 ) = (2x, x x 2 ), (b) T : R 2 R 2, T (x, x 2 ) = (x + 3x 2, x 2 ), (c) T : R 2 R, T (x, x 2 )
Wyszukiwanie obrazów 1
 Wyszukiwanie obrazów 1 Wyszukiwanie według zawartości Wyszukiwanie wg zawartości jest procesem wyszukiwania w bazach danych (zbiorach dokumentów ) obiektów o treści najbardziej zbliżonej do zadanego wzorca.
Wyszukiwanie obrazów 1 Wyszukiwanie według zawartości Wyszukiwanie wg zawartości jest procesem wyszukiwania w bazach danych (zbiorach dokumentów ) obiektów o treści najbardziej zbliżonej do zadanego wzorca.
Przekształcenia geometryczne. Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej
 Przekształcenia geometryczne Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej Akademia Górniczo Hutnicza w Krakowie Przekształcenia elementarne w przestrzeni D Punkty p w E na płaszczyźnie
Przekształcenia geometryczne Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej Akademia Górniczo Hutnicza w Krakowie Przekształcenia elementarne w przestrzeni D Punkty p w E na płaszczyźnie
dr Mariusz Grządziel 15,29 kwietnia 2014 Przestrzeń R k R k = R R... R k razy Elementy R k wektory;
 Wykłady 8 i 9 Pojęcia przestrzeni wektorowej i macierzy Układy równań liniowych Elementy algebry macierzy dodawanie, odejmowanie, mnożenie macierzy; macierz odwrotna dr Mariusz Grządziel 15,29 kwietnia
Wykłady 8 i 9 Pojęcia przestrzeni wektorowej i macierzy Układy równań liniowych Elementy algebry macierzy dodawanie, odejmowanie, mnożenie macierzy; macierz odwrotna dr Mariusz Grządziel 15,29 kwietnia
Formy kwadratowe. Mirosław Sobolewski. Wydział Matematyki, Informatyki i Mechaniki UW. 14. wykład z algebry liniowej Warszawa, styczeń 2011
 Formy kwadratowe Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 14. wykład z algebry liniowej Warszawa, styczeń 2011 Mirosław Sobolewski (UW) Warszawa, 2011 1 / 16 Definicja Niech V,
Formy kwadratowe Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 14. wykład z algebry liniowej Warszawa, styczeń 2011 Mirosław Sobolewski (UW) Warszawa, 2011 1 / 16 Definicja Niech V,
Podstawy robotyki. Wykład II. Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska
 Podstawy robotyki Wykład II Ruch ciała sztywnego w przestrzeni euklidesowej Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Preliminaria matematyczne
Podstawy robotyki Wykład II Ruch ciała sztywnego w przestrzeni euklidesowej Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Preliminaria matematyczne
Metody Przetwarzania Danych Meteorologicznych Ćwiczenia 14
 Danych Meteorologicznych Sylwester Arabas (ćwiczenia do wykładu dra Krzysztofa Markowicza) Instytut Geofizyki, Wydział Fizyki Uniwersytetu Warszawskiego 18. stycznia 2010 r. Zadanie 14.1 : polecenie znalezienie
Danych Meteorologicznych Sylwester Arabas (ćwiczenia do wykładu dra Krzysztofa Markowicza) Instytut Geofizyki, Wydział Fizyki Uniwersytetu Warszawskiego 18. stycznia 2010 r. Zadanie 14.1 : polecenie znalezienie
Rozdział 5. Macierze. a 11 a a 1m a 21 a a 2m... a n1 a n2... a nm
 Rozdział 5 Macierze Funkcję, która każdej parze liczb naturalnych (i,j) (i = 1,,n;j = 1,,m) przyporządkowuje dokładnie jedną liczbę a ij F, gdzie F = R lub F = C, nazywamy macierzą (rzeczywistą, gdy F
Rozdział 5 Macierze Funkcję, która każdej parze liczb naturalnych (i,j) (i = 1,,n;j = 1,,m) przyporządkowuje dokładnie jedną liczbę a ij F, gdzie F = R lub F = C, nazywamy macierzą (rzeczywistą, gdy F
1 Podobieństwo macierzy
 GAL (Informatyka) Wykład - zagadnienie własne Wersja z dnia 6 lutego 2014 Paweł Bechler 1 Podobieństwo macierzy Definicja 1 Powiemy, że macierze A, B K n,n są podobne, jeżeli istnieje macierz nieosobliwa
GAL (Informatyka) Wykład - zagadnienie własne Wersja z dnia 6 lutego 2014 Paweł Bechler 1 Podobieństwo macierzy Definicja 1 Powiemy, że macierze A, B K n,n są podobne, jeżeli istnieje macierz nieosobliwa
Systemy uczące się Lab 4
 Systemy uczące się Lab 4 dr Przemysław Juszczuk Katedra Inżynierii Wiedzy, Uniwersytet Ekonomiczny 26 X 2018 Projekt zaliczeniowy Podstawą zaliczenia ćwiczeń jest indywidualne wykonanie projektu uwzględniającego
Systemy uczące się Lab 4 dr Przemysław Juszczuk Katedra Inżynierii Wiedzy, Uniwersytet Ekonomiczny 26 X 2018 Projekt zaliczeniowy Podstawą zaliczenia ćwiczeń jest indywidualne wykonanie projektu uwzględniającego
Obraz jako funkcja Przekształcenia geometryczne
 Cyfrowe przetwarzanie obrazów I Obraz jako funkcja Przekształcenia geometryczne dr. inż Robert Kazała Definicja obrazu Obraz dwuwymiarowa funkcja intensywności światła f(x,y); wartość f w przestrzennych
Cyfrowe przetwarzanie obrazów I Obraz jako funkcja Przekształcenia geometryczne dr. inż Robert Kazała Definicja obrazu Obraz dwuwymiarowa funkcja intensywności światła f(x,y); wartość f w przestrzennych
Rozwiązywanie układów równań liniowych metody dokładne Materiały pomocnicze do ćwiczeń z metod numerycznych
 Rozwiązywanie układów równań liniowych metody dokładne Materiały pomocnicze do ćwiczeń z metod numerycznych Piotr Modliński Wydział Geodezji i Kartografii PW 13 stycznia 2012 P. Modliński, GiK PW Rozw.
Rozwiązywanie układów równań liniowych metody dokładne Materiały pomocnicze do ćwiczeń z metod numerycznych Piotr Modliński Wydział Geodezji i Kartografii PW 13 stycznia 2012 P. Modliński, GiK PW Rozw.
Adaptive wavelet synthesis for improving digital image processing
 for improving digital image processing Politechnika Łódzka Wydział Fizyki Technicznej, Informatyki i Matematyki Stosowanej 4 listopada 2010 Plan prezentacji 1 Wstęp 2 Dyskretne przekształcenie falkowe
for improving digital image processing Politechnika Łódzka Wydział Fizyki Technicznej, Informatyki i Matematyki Stosowanej 4 listopada 2010 Plan prezentacji 1 Wstęp 2 Dyskretne przekształcenie falkowe
O MACIERZACH I UKŁADACH RÓWNAŃ
 O MACIERZACH I UKŁADACH RÓWNAŃ Problem Jak rozwiązać podany układ równań? 2x + 5y 8z = 8 4x + 3y z = 2x + 3y 5z = 7 x + 8y 7z = Definicja Równanie postaci a x + a 2 x 2 + + a n x n = b gdzie a, a 2, a
O MACIERZACH I UKŁADACH RÓWNAŃ Problem Jak rozwiązać podany układ równań? 2x + 5y 8z = 8 4x + 3y z = 2x + 3y 5z = 7 x + 8y 7z = Definicja Równanie postaci a x + a 2 x 2 + + a n x n = b gdzie a, a 2, a
Wykład 10 Skalowanie wielowymiarowe
 Wykład 10 Skalowanie wielowymiarowe Wrocław, 30.05.2018r Skalowanie wielowymiarowe (Multidimensional Scaling (MDS)) Główne cele MDS: przedstawienie struktury badanych obiektów przez określenie treści wymiarów
Wykład 10 Skalowanie wielowymiarowe Wrocław, 30.05.2018r Skalowanie wielowymiarowe (Multidimensional Scaling (MDS)) Główne cele MDS: przedstawienie struktury badanych obiektów przez określenie treści wymiarów
a 11 a a 1n a 21 a a 2n... a m1 a m2... a mn a 1j a 2j R i = , C j =
 11 Algebra macierzy Definicja 11.1 Dla danego ciała F i dla danych m, n N funkcję A : {1,..., m} {1,..., n} F nazywamy macierzą m n (macierzą o m wierszach i n kolumnach) o wyrazach z F. Wartość A(i, j)
11 Algebra macierzy Definicja 11.1 Dla danego ciała F i dla danych m, n N funkcję A : {1,..., m} {1,..., n} F nazywamy macierzą m n (macierzą o m wierszach i n kolumnach) o wyrazach z F. Wartość A(i, j)
Rozpoznawanie obrazów
 Rozpoznawanie obrazów Ćwiczenia lista zadań nr 7 autorzy: A. Gonczarek, J.M. Tomczak Przykładowe problemy Klasyfikacja binarna Dla obrazu x zaproponowano dwie cechy φ(x) = (φ 1 (x) φ 2 (x)) T. Na obrazie
Rozpoznawanie obrazów Ćwiczenia lista zadań nr 7 autorzy: A. Gonczarek, J.M. Tomczak Przykładowe problemy Klasyfikacja binarna Dla obrazu x zaproponowano dwie cechy φ(x) = (φ 1 (x) φ 2 (x)) T. Na obrazie
Algebra liniowa z geometrią
 Algebra liniowa z geometrią Maciej Czarnecki 15 stycznia 2013 Spis treści 1 Geometria płaszczyzny 2 1.1 Wektory i skalary........................... 2 1.2 Macierze, wyznaczniki, układy równań liniowych.........
Algebra liniowa z geometrią Maciej Czarnecki 15 stycznia 2013 Spis treści 1 Geometria płaszczyzny 2 1.1 Wektory i skalary........................... 2 1.2 Macierze, wyznaczniki, układy równań liniowych.........
Skalowanie wielowymiarowe idea
 Skalowanie wielowymiarowe idea Jedną z wad metody PCA jest możliwość używania jedynie zmiennych ilościowych, kolejnym konieczność posiadania pełnych danych z doświadczenia(nie da się użyć PCA jeśli mamy
Skalowanie wielowymiarowe idea Jedną z wad metody PCA jest możliwość używania jedynie zmiennych ilościowych, kolejnym konieczność posiadania pełnych danych z doświadczenia(nie da się użyć PCA jeśli mamy
Ważne rozkłady i twierdzenia c.d.
 Ważne rozkłady i twierdzenia c.d. Funkcja charakterystyczna rozkładu Wielowymiarowy rozkład normalny Elipsa kowariacji Sploty rozkładów Rozkłady jednostajne Sploty z rozkładem normalnym Pobieranie próby
Ważne rozkłady i twierdzenia c.d. Funkcja charakterystyczna rozkładu Wielowymiarowy rozkład normalny Elipsa kowariacji Sploty rozkładów Rozkłady jednostajne Sploty z rozkładem normalnym Pobieranie próby
KADD Minimalizacja funkcji
 Minimalizacja funkcji n-wymiarowych Forma kwadratowa w n wymiarach Procedury minimalizacji Minimalizacja wzdłuż prostej w n-wymiarowej przestrzeni Metody minimalizacji wzdłuż osi współrzędnych wzdłuż kierunków
Minimalizacja funkcji n-wymiarowych Forma kwadratowa w n wymiarach Procedury minimalizacji Minimalizacja wzdłuż prostej w n-wymiarowej przestrzeni Metody minimalizacji wzdłuż osi współrzędnych wzdłuż kierunków
Wyszukiwanie informacji w internecie. Nguyen Hung Son
 Wyszukiwanie informacji w internecie Nguyen Hung Son Jak znaleźć informację w internecie? Wyszukiwarki internetowe: Potężne machiny wykorzystujące najnowsze metody z różnych dziedzin Architektura: trzy
Wyszukiwanie informacji w internecie Nguyen Hung Son Jak znaleźć informację w internecie? Wyszukiwarki internetowe: Potężne machiny wykorzystujące najnowsze metody z różnych dziedzin Architektura: trzy
3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B
![3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B](/thumbs/73/69286698.jpg "3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B") 1. Dla macierzy a) A = b) A = c) A = d) A = 3 1 + i 1 i i i 0 i i 0 1 + i 1 i 0 0 0 0 1 0 1 0 1 + i 1 i Wyznaczyć macierze spełniające własność komutacji: A, X = B. Obliczyć pierwiaski z macierzy: A =
1. Dla macierzy a) A = b) A = c) A = d) A = 3 1 + i 1 i i i 0 i i 0 1 + i 1 i 0 0 0 0 1 0 1 0 1 + i 1 i Wyznaczyć macierze spełniające własność komutacji: A, X = B. Obliczyć pierwiaski z macierzy: A =
A,B M! v V ; A + v = B, (1.3) AB = v. (1.4)
 AB = v. (1.4)") Rozdział 1 Prosta i płaszczyzna 1.1 Przestrzeń afiniczna Przestrzeń afiniczna to matematyczny model przestrzeni jednorodnej, bez wyróżnionego punktu. Można w niej przesuwać punkty równolegle do zadanego
Rozdział 1 Prosta i płaszczyzna 1.1 Przestrzeń afiniczna Przestrzeń afiniczna to matematyczny model przestrzeni jednorodnej, bez wyróżnionego punktu. Można w niej przesuwać punkty równolegle do zadanego
φ(x 1,..., x n ) = a i x 2 i +
 = a i x 2 i +") Teoria na egzamin z algebry liniowej Wszystkie podane pojęcia należy umieć określić i podać pprzykłady, ewentualnie kontrprzykłady. Ponadto należy znać dowody tam gdzie to jest zaznaczone. Liczby zespolone.
Teoria na egzamin z algebry liniowej Wszystkie podane pojęcia należy umieć określić i podać pprzykłady, ewentualnie kontrprzykłady. Ponadto należy znać dowody tam gdzie to jest zaznaczone. Liczby zespolone.
Zadania przygotowawcze, 3 kolokwium
 Zadania przygotowawcze, 3 kolokwium Mirosław Sobolewski 8 grudnia. Niech φ t : R 3 R 3 bedzie endomorfizmem określonym wzorem φ t ((x, x, )) (x +, tx + x, x + ), gdzie parametr t R. a) Zbadać dla jakiej
Zadania przygotowawcze, 3 kolokwium Mirosław Sobolewski 8 grudnia. Niech φ t : R 3 R 3 bedzie endomorfizmem określonym wzorem φ t ((x, x, )) (x +, tx + x, x + ), gdzie parametr t R. a) Zbadać dla jakiej
= i Ponieważ pierwiastkami stopnia 3 z 1 są (jak łatwo wyliczyć) liczby 1, 1+i 3
 liczby 1, 1+i 3") ZESTAW I 1. Rozwiązać równanie. Pierwiastki zaznaczyć w płaszczyźnie zespolonej. z 3 8(1 + i) 3 0, Sposób 1. Korzystamy ze wzoru a 3 b 3 (a b)(a 2 + ab + b 2 ), co daje: (z 2 2i)(z 2 + 2(1 + i)z + (1 +
ZESTAW I 1. Rozwiązać równanie. Pierwiastki zaznaczyć w płaszczyźnie zespolonej. z 3 8(1 + i) 3 0, Sposób 1. Korzystamy ze wzoru a 3 b 3 (a b)(a 2 + ab + b 2 ), co daje: (z 2 2i)(z 2 + 2(1 + i)z + (1 +
METODY INŻYNIERII WIEDZY
 METODY INŻYNIERII WIEDZY Metoda K Najbliższych Sąsiadów K-Nearest Neighbours (KNN) ĆWICZENIA Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
METODY INŻYNIERII WIEDZY Metoda K Najbliższych Sąsiadów K-Nearest Neighbours (KNN) ĆWICZENIA Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
Implementacja filtru Canny ego
 ANALIZA I PRZETWARZANIE OBRAZÓW Implementacja filtru Canny ego Autor: Katarzyna Piotrowicz Kraków,2015-06-11 Spis treści 1. Wstęp... 1 2. Implementacja... 2 3. Przykłady... 3 Porównanie wykrytych krawędzi
ANALIZA I PRZETWARZANIE OBRAZÓW Implementacja filtru Canny ego Autor: Katarzyna Piotrowicz Kraków,2015-06-11 Spis treści 1. Wstęp... 1 2. Implementacja... 2 3. Przykłady... 3 Porównanie wykrytych krawędzi
Agnieszka Nowak Brzezińska Wykład III
 Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
[ A i ' ]=[ D ][ A i ] (2.3)
![[ A i ' ]=[ D ][ A i ] (2.3)](/thumbs/71/66132002.jpg "[ A i ' ]=[ D ][ A i ] (2.3)") . WSTĘP DO TEORII SPRĘŻYSTOŚCI 1.. WSTĘP DO TEORII SPRĘŻYSTOŚCI.1. Tensory macierzy Niech macierz [D] będzie macierzą cosinusów kierunkowych [ D ]=[ i ' j ] (.1) Macierz transformowana jest równa macierzy
. WSTĘP DO TEORII SPRĘŻYSTOŚCI 1.. WSTĘP DO TEORII SPRĘŻYSTOŚCI.1. Tensory macierzy Niech macierz [D] będzie macierzą cosinusów kierunkowych [ D ]=[ i ' j ] (.1) Macierz transformowana jest równa macierzy
Spośród licznych filtrów nieliniowych najlepszymi właściwościami odznacza się filtr medianowy prosty i skuteczny.
 Filtracja nieliniowa może być bardzo skuteczną metodą polepszania jakości obrazów Filtry nieliniowe Filtr medianowy Spośród licznych filtrów nieliniowych najlepszymi właściwościami odznacza się filtr medianowy
Filtracja nieliniowa może być bardzo skuteczną metodą polepszania jakości obrazów Filtry nieliniowe Filtr medianowy Spośród licznych filtrów nieliniowych najlepszymi właściwościami odznacza się filtr medianowy
Rozpoznawanie obiektów z użyciem znaczników
 Rozpoznawanie obiektów z użyciem znaczników Sztuczne znaczniki w lokalizacji obiektów (robotów) Aktywne znaczniki LED do lokalizacji w przestrzeni 2D (do 32): Znaczniki z biblioteki AruCo (do 1024) Id
Rozpoznawanie obiektów z użyciem znaczników Sztuczne znaczniki w lokalizacji obiektów (robotów) Aktywne znaczniki LED do lokalizacji w przestrzeni 2D (do 32): Znaczniki z biblioteki AruCo (do 1024) Id
METODY INŻYNIERII WIEDZY
 METODY INŻYNIERII WIEDZY Metoda K Najbliższych Sąsiadów K-Nearest Neighbours (KNN) ĆWICZENIA Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
METODY INŻYNIERII WIEDZY Metoda K Najbliższych Sąsiadów K-Nearest Neighbours (KNN) ĆWICZENIA Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU
 ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU obraz dr inż. Jacek Naruniec Analiza Składowych Niezależnych (ICA) Independent Component Analysis Dąży do wyznaczenia zmiennych niezależnych z obserwacji Problem opiera
ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU obraz dr inż. Jacek Naruniec Analiza Składowych Niezależnych (ICA) Independent Component Analysis Dąży do wyznaczenia zmiennych niezależnych z obserwacji Problem opiera
Zadania egzaminacyjne
 Rozdział 13 Zadania egzaminacyjne Egzamin z algebry liniowej AiR termin I 03022011 Zadanie 1 Wyznacz sumę rozwiązań równania: (8z + 1 i 2 2 7 iz 4 = 0 Zadanie 2 Niech u 0 = (1, 2, 1 Rozważmy odwzorowanie
Rozdział 13 Zadania egzaminacyjne Egzamin z algebry liniowej AiR termin I 03022011 Zadanie 1 Wyznacz sumę rozwiązań równania: (8z + 1 i 2 2 7 iz 4 = 0 Zadanie 2 Niech u 0 = (1, 2, 1 Rozważmy odwzorowanie
Laboratorium Przetwarzania Sygnałów
 PTS - laboratorium Laboratorium Przetwarzania Sygnałów Ćwiczenie 4 Transformacja falkowa Opracował: - prof. dr hab. inż. Krzysztof Kałużyński Zakład Inżynierii Biomedycznej Instytut Metrologii i Inżynierii
PTS - laboratorium Laboratorium Przetwarzania Sygnałów Ćwiczenie 4 Transformacja falkowa Opracował: - prof. dr hab. inż. Krzysztof Kałużyński Zakład Inżynierii Biomedycznej Instytut Metrologii i Inżynierii
przetworzonego sygnału
 Synteza falek ortogonalnych na podstawie oceny przetworzonego sygnału Instytut Informatyki Politechnika Łódzka 28 lutego 2012 Plan prezentacji 1 Sformułowanie problemu 2 3 4 Historia przekształcenia falkowego
Synteza falek ortogonalnych na podstawie oceny przetworzonego sygnału Instytut Informatyki Politechnika Łódzka 28 lutego 2012 Plan prezentacji 1 Sformułowanie problemu 2 3 4 Historia przekształcenia falkowego
zadania z rachunku prawdopodobieństwa zapożyczone z egzaminów aktuarialnych
 zadania z rachunku prawdopodobieństwa zapożyczone z egzaminów aktuarialnych 1. [E.A 5.10.1996/zad.4] Funkcja gęstości dana jest wzorem { 3 x + 2xy + 1 y dla (x y) (0 1) (0 1) 4 4 P (X > 1 2 Y > 1 2 ) wynosi:
zadania z rachunku prawdopodobieństwa zapożyczone z egzaminów aktuarialnych 1. [E.A 5.10.1996/zad.4] Funkcja gęstości dana jest wzorem { 3 x + 2xy + 1 y dla (x y) (0 1) (0 1) 4 4 P (X > 1 2 Y > 1 2 ) wynosi:
PRZYGOTOWANIE WSTĘPNE OBRAZU DO OBRAZOWEJ BAZY DANYCH
 Słowa kluczowe: przetwarzanie obrazu, obrazowe bazy danych, segmentacja obrazu, selekcja obiektów, segmentacja elementów roślinnych Tatiana JAWORSKA * PRZYGOTOWANIE WSTĘPNE OBRAZU DO OBRAZOWEJ BAZY DANYCH
Słowa kluczowe: przetwarzanie obrazu, obrazowe bazy danych, segmentacja obrazu, selekcja obiektów, segmentacja elementów roślinnych Tatiana JAWORSKA * PRZYGOTOWANIE WSTĘPNE OBRAZU DO OBRAZOWEJ BAZY DANYCH
1 Wartości własne oraz wektory własne macierzy
 Rozwiązania zadania umieszczonego na końcu poniższych notatek proszę przynieść na kartkach Proszę o staranne i formalne uzasadnienie odpowiedzi Za zadanie można uzyskać do 6 punktów (jeżeli przyniesione
Rozwiązania zadania umieszczonego na końcu poniższych notatek proszę przynieść na kartkach Proszę o staranne i formalne uzasadnienie odpowiedzi Za zadanie można uzyskać do 6 punktów (jeżeli przyniesione
Agnieszka Nowak Brzezińska Wykład III
 Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Robert Susmaga. Instytut Informatyki ul. Piotrowo 2 Poznań
 ... Robert Susmaga Instytut Informatyki ul. Piotrowo 2 Poznań kontakt mail owy Robert.Susmaga@CS.PUT.Poznan.PL kontakt osobisty Centrum Wykładowe, blok informatyki, pok. 7 Wyłączenie odpowiedzialności
... Robert Susmaga Instytut Informatyki ul. Piotrowo 2 Poznań kontakt mail owy Robert.Susmaga@CS.PUT.Poznan.PL kontakt osobisty Centrum Wykładowe, blok informatyki, pok. 7 Wyłączenie odpowiedzialności
Układy równań i nierówności liniowych
 Układy równań i nierówności liniowych Wiesław Krakowiak 1 grudnia 2010 1 Układy równań liniowych DEFINICJA 11 Układem równań m liniowych o n niewiadomych X 1,, X n, nazywamy układ postaci: a 11 X 1 + +
Układy równań i nierówności liniowych Wiesław Krakowiak 1 grudnia 2010 1 Układy równań liniowych DEFINICJA 11 Układem równań m liniowych o n niewiadomych X 1,, X n, nazywamy układ postaci: a 11 X 1 + +
Przekształcenie Fouriera obrazów FFT
 Przekształcenie ouriera obrazów T 6 P. Strumiłło, M. Strzelecki Przekształcenie ouriera ourier wymyślił sposób rozkładu szerokiej klasy funkcji (sygnałów) okresowych na składowe harmoniczne; taką reprezentację
Przekształcenie ouriera obrazów T 6 P. Strumiłło, M. Strzelecki Przekształcenie ouriera ourier wymyślił sposób rozkładu szerokiej klasy funkcji (sygnałów) okresowych na składowe harmoniczne; taką reprezentację
Przegląd metod optymalizacji wielowymiarowej. Funkcja testowa. Funkcja testowa. Notes. Notes. Notes. Notes. Tomasz M. Gwizdałła
 Przegląd metod optymalizacji wielowymiarowej Tomasz M. Gwizdałła 2012.12.06 Funkcja testowa Funkcją testową dla zagadnień rozpatrywanych w ramach tego wykładu będzie funkcja postaci f (x) = (x 1 1) 4 +
Przegląd metod optymalizacji wielowymiarowej Tomasz M. Gwizdałła 2012.12.06 Funkcja testowa Funkcją testową dla zagadnień rozpatrywanych w ramach tego wykładu będzie funkcja postaci f (x) = (x 1 1) 4 +
Diagonalizacja macierzy i jej zastosowania
 Diagonalizacja macierzy i jej zastosowania Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 9. wykład z algebry liniowej Warszawa, listopad 2012 Mirosław Sobolewski (UW) Warszawa,listopad
Diagonalizacja macierzy i jej zastosowania Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 9. wykład z algebry liniowej Warszawa, listopad 2012 Mirosław Sobolewski (UW) Warszawa,listopad
Segmentacja przez detekcje brzegów
 Segmentacja przez detekcje brzegów Lokalne zmiany jasności obrazu niosą istotną informację o granicach obszarów (obiektów) występujących w obrazie. Metody detekcji dużych, lokalnych zmian jasności w obrazie
Segmentacja przez detekcje brzegów Lokalne zmiany jasności obrazu niosą istotną informację o granicach obszarów (obiektów) występujących w obrazie. Metody detekcji dużych, lokalnych zmian jasności w obrazie