PROBLEMY GENERACJI SIATKI MES DLA KÓŁ ZĘBATYCH ПРОБЛЕМЫ ГЕНЕРАЦИИ КЭ-СЕТКИ ДЛЯ ЗУБЧАТЫХ КОЛЕС
|
|
|
- Alina Krupa
- 8 lat temu
- Przeglądów:
Transkrypt
1
2
3
4 Zeszyty Naukowe Katedry Mechaniki Stosowanej, nr 0/003 Aleksander SŁADKOWSKI, Katedra ransportu Szynowego, Politechnika Śląska Marek SIARZ, Katedra ransportu Szynowego, Politechnika Śląska Jerzy SŁADKOWSKI, Ukraiński Państwowy Uniwersytet Chemiczno - echnologiczny PROBLEMY GENERACJI SIAKI MES DLA KÓŁ ZĘBAYCH Streszczenie. W pracy rozpatrzono nową metodykę dla przedstawienia geometrii modelu ewolwentowego koła zębatego w MES przy użyciu jako tworzących zarys, krzywych złożonych spline line Bezier a. Zaletą otrzymanego modelu jest to, że dopuszcza dostatecznie prosty algorytm dyskretyzacji ES zarówno rozpatrywanego zarysu jak i całego obszaru. ПРОБЛЕМЫ ГЕНЕРАЦИИ КЭ-СЕТКИ ДЛЯ ЗУБЧАТЫХ КОЛЕС Аннотация. В данной статье рассматривается новая методика для образования геометрии конечно-элементной модели эвольвентного зубчатого колеса с использованием в качестве образующих кривых контура сплайнов Безье. Преимущество полученной геометрической модели заключается в том, что она допускает достаточно простую алгоритмизацию КЭ-дискретизации как рассматриваемого контура, так и области в целом. 1. WSĘP Wielu różnych uczonych prowadziło badania nad zachowaniem się pojedynczych zębów różnych kół zębatych pod wpływem przyłożonego do nich obciążenia. We współczesnej literaturze problem kontaktowej współpracy dwóch kół zębatych jest rzadko rozpatrywany [1,]. Chcąc opisać wzajemne oddziaływanie dwóch kół zębatych na siebie należy rozpatrzyć zazębienie dwóch par zębów jednocześnie. Dla większości przekładni zębatych więcej niż 50% czasu pracy przypada na zazębienie dwóch par zębów. W przeciwnym przypadku pojawiają się dodatkowe obciążenia dynamiczne. W celu otrzymania poprawnych wyników, wybrano segmenty składające się z trzech zębów. Większa ilość zębów w segmencie wpływać będzie negatywnie na dokładność wyników obliczeń, ponieważ przyrost ilości elementów prowadzi do nagromadzenia błędów związanych z zaokrągleniem otrzymywanych wyników przez algorytm programu wykorzystujący metodę elementów skończonych [3]. Prowadzi to również do nieoczekiwanego zwiększenia czasu obliczeń. Dla uproszczenia rozwiązania wyżej opisanego problemu opracowano program, którego rezultatem obliczeń jest zapisanie w neutralnym pliku geometrii segmentu, który składa się z jednego zęba centralnego i dwóch sąsiednich dla konkretnego koła zębatego (napędzającego lub napędzanego). Program eeth, opracowano we współczesnym języku programowania IBASIC. Podstawą jego jest pracy [4,5], а teoretyczne podstawy ewolwentowego zazębienia zostały zaczerpnięte z pracy [6].
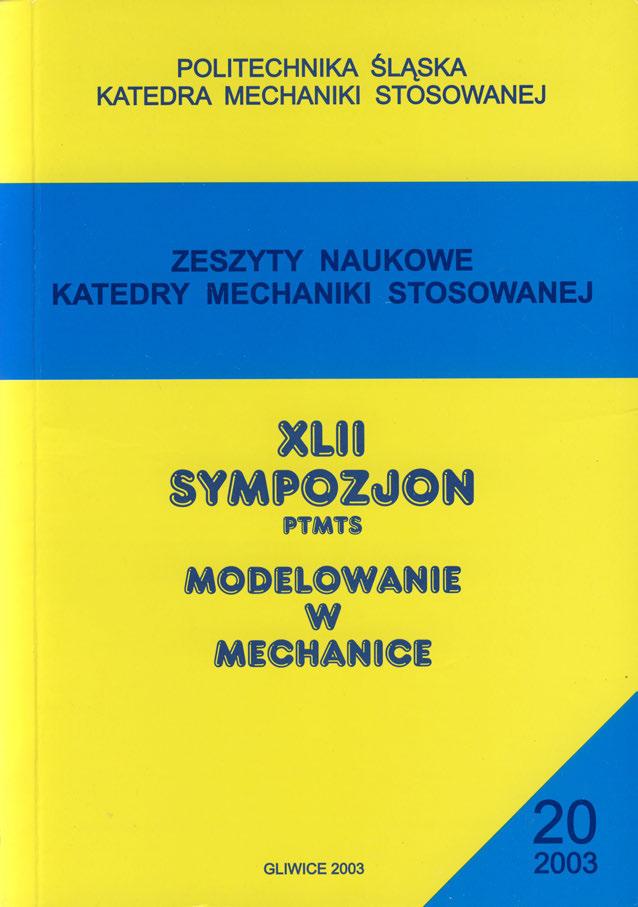
5 A. Sładkowski, M. Sitarz, J. Sładkowski. SFORMUŁOWANIE I ROZWIĄZANIE PROBLEMU Jako dane początkowe dla opracowanego programu muszą być zaznaczone: moduł zęba, liczba zębów i współczynniki korekcji początkowego konturu dla kół zębatych napędzanych i napędnych. W wyniku obliczeń otrzymujemy profil jednego zęba zadany punktowo, co nie jest wygodne dla dalszych prac (otrzymane punkty trzeba połączyć w krzywe w celu dalszego eksportowania i tworzenia modelu MES). en krok zależy od dalszego opracowania pliku neutralnego z wynikami obliczeń programu. Z tego powodu, że dla dalszej pracy został wybrany pre/postprocesor FEMAP kształt krzywych końcowych, jakie trzeba wykorzystać dla aproksymacji otrzymanych wcześniej punktów konturu zęba ewolwentowego trzeba wybrać wśród dostatecznie ograniczonego asortymentu matematycznych krzywych. o jest linii prostych (oczywiście profil stworzony z odcinków linii prostych tylko przypomina realny profil i dlatego nie może być wykorzystany w tej pracy), łuki okręgów (bardziej prawidłowy kształt krzywych zastępujących realny kontur, jednak wynika problem wyznaczenia promienia krzywych z tego powodu, że on musi być zmienny, stąd wynika problem wyznaczenia współrzędnych środków łuków). akoż możliwy eliptyczny, paraboliczny i hiperboliczny kształt krzywych aproksymujących, jednak każda z nich ma kilka wad, które nie pozwalają na ich wykorzystanie. Wybrane zostały specjalne krzywe mające nazwę nierównomiernych racjonalnych krzywych Bezier a - Non Uniform Rational Bezier Splines (NURBS). Jednak w tym wypadku kiedy liczba punktów składa się z więcej niż 100 punktów na jeden ząb (jak zostało wyżej wyznaczone liczba zębów musi wynosić przynajmniej trzy), proces ten staje się bardzo pracochłonny a nawet niemożliwy. Rozwiązać ten problem udało się przy bardziej szczegółowym rozpatrzeniu struktury krzywych Bezier a. Krzywe te bywają kilku rodzajów. Jak pokazała analiza dokumentacji technicznej zwykle krzywe Bezier a to są krzywe trzeciego rzędu. Jednak bywają uproszczone krzywe drugiego rzędu, które są szczególnym przypadkiem skomplikowanych wielopunktowych NURBS. Dla ich tworzenia wystarczy mieć tylko trzy punkty kontrolne przy czym przy prawidłowym zadaniu punktów kontrolnych dla uproszczonych krzywych różnica pomiędzy otrzymanymi krzywymi jest na tyle mała że można ją pominąć beż żadnej straty dla rozpatrywanego modelu. Jak wiadomo okręgi, elipsy, parabole i hiperbole są przekrojami stożka, które można matematycznie wyznaczyć jako funkcję drugiego rzędu. Bardzo korzystną właściwością uproszczonych krzywych Bezier a jest to, że w zależności od położenia współrzędnych punktów kontrolnych krzywe te mogą być jakimkolwiek przekrojem stożkowym, z tego powodu, że te ostatnie są szczególnym przypadkiem krzywych Beziera a. Główną przyczyną wyboru uproszczonych krzywych Bezier a jest możliwość dalszego matematycznego opracowania dla otrzymania np. dokładnej liczby długości krzywych itd. rzypunktowe krzywe Bezier a są krzywymi drugiego rzędu, dla których matematyczna x( t) zależność tensora { P ( t) } = może być przedstawiona w postaci y( t) { P ( t) } = (1 t) { P0 } + t(1 t) { P1 } + t { P }, (1) gdzie parametr t zmienia się w przedziałach 0 t 1. Początkowo trzeba było założyć jaka ostateczna liczba krzywych będzie narysowana dla rozpatrywanego w pierwszej kolejności centralnego zęba. Jak wykazały eksperymenty numeryczne dla generacji krzywej przejściowej AB (rys. 1) wystarczy jedna trzypunktowa krzywa Bezier a. Jednak robocza ewolwentowa powierzchnia zęba musi być podzielona z tego powodu, że w celu opracowania prawidłowej współpracy kontaktowej, potrzebne są punkty, które zagwarantują kontakt. ymi punktami mogą być punkty zazębienia i skrajne punkty profilu ewolwentowego dla sąsiednich zębów. Dlatego podjęto decyzje o podziale
6 Problemy generacji siatki MES dla kól zębatych profilu ewolwentowego na dwa odcinki od dolnego punktu roboczego B do specjalnie obliczonego punktu С, który znajduje się w punkcie przecięcia koła podziałowego z profilem ewolwentowym i dalej od punktu С do punktu D, który jednocześnie należy do profilu ewolwentowego i koła wierzchołkowego. W celu narysowania powyższych krzywych potrzebne są trzy punkty kontrolne z których dwa są skrajnymi punktami krzywej aproksymującej a trzeci leży na przecięciu dwóch linii prostych dotyczących profilu w skrajnych punktach rozpatrywanego odcinka profilu (na rys. przedstawiono punkty Е, F, G, odpowiednio dla krzywych opisujących krzywą przejściową, dolnej i górnej części profilu ewolwentowego) [7]. Rys. 1. Sposób rysowania trzypunktowych krzywych Bezier a W tym przypadku, matematycznie dla odpowiednich łuków krzywych, punkty kontrolne będą wyznaczone jak wektory wodzące rozpatrywanych powyżej punktów. S S S { P } { } { } { } { } { } 0 = B = xb, yb, P1 = F = xf, yf, P = C xc, yc { P } { } { } { } { } { } 0 = C = xc, yc, P1 = G = xg, yg, P = D xd, yd { P } = A = { x, y }, { P } = E = { x, y }, { P } = B { x, y } 1 : = : = 3 : 0 A A 1 E E = W praktyce w celu znalezienia współrzędnych jakiegokolwiek średniego kontrolnego punktu trzeba znaleźć rozwiązanie układu równań wyżej ukazanych linii prostych w następującym kształcie y y1 = k1( x x1 ), () y y = k( x x) gdzie k 1 i k tangensy kątów pochylenia odpowiednich linii prostych, а ( x 1, y1) i ( x, y) współrzędne skrajnych punktów kontrolnych. Dla wyznaczenia rozpatrywanych kątów trzeba wykorzystać wyznaczone kąty kierunku nacisku w punktach B, C i D. Kąt kierunku nacisku to jest kąt, który składa się z linii prostopadłej do profilu zęba dla konkretnego punktu profilu z linia prostą dotykającej okręgu o odpowiednim promieniu (np. dla punktu C to jest promień koła podziałowego). W wyniku B B
7 A. Sładkowski, M. Sitarz, J. Sładkowski czego, jeżeli wziąć np. górna część profilu ewolwentowego (rys. 3.) to kąt pochyłu linii stycznej do profilu w punkcie C przedstawia wzór π ψ = ( α d ϕ ), (3) xc gdzieα d - kąt kierunku nacisku w punkcie С, а ϕ = arctan - odpowiedni kąt środkowy. y C Rys.. Geometryczne wyznaczenie kata nachylenia ψ linii stycznej do profilu w punkcie С Wtedy ostatecznie wyznaczamy współczynniki π x C π x k = 1 tan α d arctan, y D k = tan α a1 arctan, (4) C yd gdzie α a1 - kąt kierunku nacisku na wierzchołek zęba. Zmiana znaku przed arctangensami związana z ujemnym znakiem współrzędnej X dla wszystkich rozpatrywanych punktów. W takim wypadku jeżeli obliczone są współczynniki k 1 i k, można rozwiązać układ równań (). W wyniku czego współrzędne średniego punktu kontrolnego dla krzywych Bezier a wyznaczają następujące wzory k1x1 kx y1 + y k1kx1 k1kx + k1 y k y1 x =, y =. (5) k1 k k1 k Np. po ostatecznym podstawieniu zmiennych, współrzędne punktu kontrolnego G wyznaczamy zgodnie ze wzorami k1xc kxd yc + yd k1k ( xc xd ) + k1 yd k yc xg =, yg =. (6) k1 k k1 k Analogicznie wyznaczamy współrzędne średniego punktu kontrolnego F dla dolnej części rozpatrywanego profilu ewolwentowego. Dla ostatniej krzywej Bezier a, która aproksymuje krzywą przejściową taki sposób znalezienia średniego punktu kontrolnego niestety nie jest możliwy dlatego, że dla skrajnego punktu А krzywej przejściowej kąt kierunku nacisku nie istnieje. W tym przypadku można skorzystać z równań linii prostych, które można narysować po znanych współrzędnych dwóch
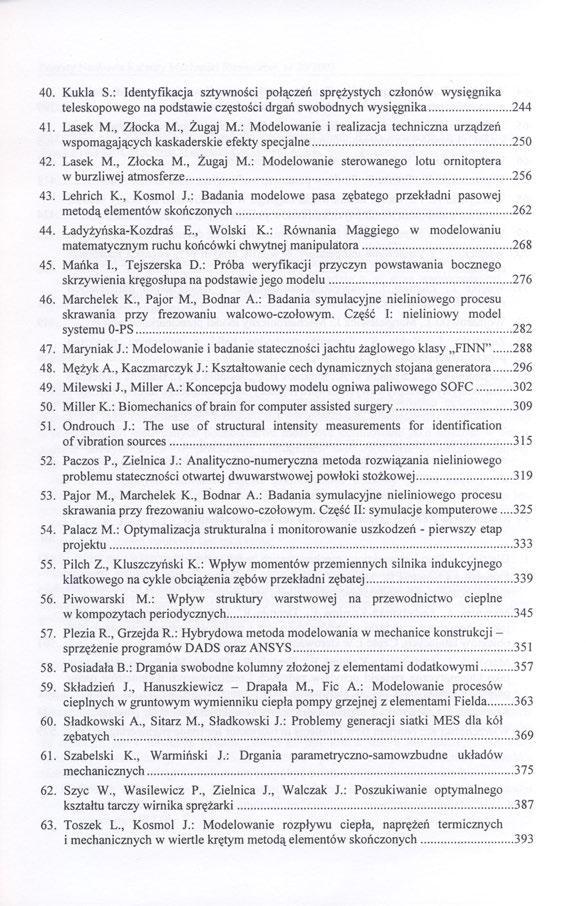
8 Problemy generacji siatki MES dla kól zębatych punktów. ymi punktami są co najmniej dwie skrajne punkty konturu z każdej strony krzywej przejściowej. Dla uproszczenia na rys. 3. pokazano schematycznie rysunek krzywej przejściowej, który może być tylko przy bardzo podciętym zębie co nie występuje w rzeczywistości. W takim wypadku układ równań dla znalezienia punktu Е można zapisać w postaci y y1 x x1 = y3 y1 x3 x1. (7) y y x x = y4 y x4 x W tych równaniach, analogicznie do poprzedniego układu (), przy pomocy matematycznego przekształcenia można otrzymać y3 y1 y4 y k1 =, k =. x3 x1 x4 x Znając te współczynniki, można znaleźć współrzędne punktu Е wystarczy podstawić potrzebne parametry do równania (5). Rys. 3. Wyznaczenie współrzędnych średniego punktu kontrolnego dla krzywej przejściowej przy pomocy metod geometrii analitycznej Wyznaczenie łuków okręgów wierzchołków i dna wrębów może się odbyć przy pomocy zapisu do pliku wynikowego w określonym porządku czterech numerów punktów z których jeden jest środkiem okręgu a trzy pozostałe leżą na łuku okręgu. 3. WYNIKI MODELOWANIA W wyniku przeprowadzonych operacji można wyznaczyć plik danych opisujący profil jednego zęba stworzony z krzywoliniowych odcinków. Dla zakończenia modelowania geometrycznego segmentu zębatego pozostało wykonać trzy działania: powtórzyć rysowanie profilu sąsiednich zębów, narysować ciało segmentu zębatego oraz połączyć wszystkie krzywe w jedna powierzchnię graniczna (rys. 4). Po zaimportowaniu geometrii segmentu zębatego do FEMAP trzeba dokonać sprawdzenia dokładności krzywych Bezier a aby uzyskać informacje o prawidłowości wyboru ukazanych
9 A. Sładkowski, M. Sitarz, J. Sładkowski krzywych. Np. rozpatrywano górny odcinek profilu ewolwentowego, który ma największą niedokładność z tego powodu, że ten odcinek ma największą długość. W wyniku czego na S niedokładność dla punktu średniego mierzona jako odległość po linii prostopadłej poprowadzonej z realnego punktu profilu na krzywą aproksymującą wyniosła (dla modułu m = 4 mm ) δ = 0, 0 mm. Jeśli odnieść wyznaczony błąd do modułu można zauważyć, że 4 δ = 9,08 10 m, (8) gdzie m moduł rozpatrywanego koła zębatego. Z powyższych rozważań nasuwa się wniosek o prawidłowości początkowego wyboru prostych krzywych Bezier a jako krzywych aproksymujących. Rys. 4. Dyskretyzacja ES segmentu zębatego W taki sposób teraz można programowo zadawać geometrie rozpatrywanego segmentu zębatego opisując odpowiednie krzywe przy pomocy krzywych Bezier a i łuków okręgów. Następnie krzywe te łączymy w jedną powierzchnię graniczną. Otrzymane informacje zapisywane są do pliku danych, który importujemy do NASRANa gdzie tworzymy model MES rozpatrywanej strefy koła zębatego. 4. WNIOSKI I KIERUNKI DALSZYCH BADAŃ Na podstawie prowadzonych badań można wysunąć następujące wnioski. Opracowana metoda pozwala prowadzić racjonalną generację siatek elementów skończonych dla kół zębatych. W podstawie tej metody jest założone wykorzystanie trzypunktowych krzywych Bezier a w celu opisania geometrii przekładni zębatych. Dokładność generowanej w taki sposób geometrii była sprawdzona i na podstawie prowadzonych badań opracowano przykłady siatek MES. W dalszych badaniach przewiduje się przeprowadzenie obliczeń współpracy kontaktowej dla różnych przekładni zębatych przy zmianie kąta obrotu kół. Przy takich badaniach oprócz rozkładu naprężeń będą obliczone sztywności przekładni zębatej w zależności od kąta obrotu.
10 Problemy generacji siatki MES dla kól zębatych LIERAURA [1] Dietrych J., Korewa W., Kornberger Z., Zygmunt K. Podstawy konstrukcji maszyn. Warsawa:WN, V s. [] MackAldener M. ooth Interior Fatigue Fracture & Robustness of Gears. Stockholm: Royal Institute of echnology, p. [3] Zienkiewicz O.C. Metoda elementów skończonych. Warszawa: Arkady, s. [4] Сладковский А.В., Мушенков Ю.А., Сладковский Ю.А. Исследование прочности корригированных зубьев эвольвентных передач с использованием MSC/ NASRAN for Windows // Вторая Российская конференция пользователей MSC. М.: Постоянное представительство MSC.Software Corporation в СНГ, С.1-6. [5] Сладковский А.В., Виноградов Б.В. Исследование напряженного состояния зубьев крупногабаритных передач при помощи ППП MSC/NASRAN // Повышение эффективности применения передовых компьютерных технологий инженерного анализа фирмы MSC.Software на предприятиях России, Белоруссии, Украины / Третья Российская конференция пользователей MSC. М.: Постоянное представительство MSC.Software Corporation в СНГ, 000. С [6] Литвин Ф.Л. Теория зубчатых зацеплений. М.: Наука, с. [7] Sładkowski J. Geometrical modeling of involute gearing // Proc. Int. Conf. Mechanika 003. Kaunas: echnologija, 003. P
WYKORZYSTANIE MES DO WYZNACZANIA WPŁYWU PĘKNIĘCIA W STOPIE ZĘBA KOŁA NA ZMIANĘ SZTYWNOŚCI ZAZĘBIENIA
 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2009 Seria: TRANSPORT z. 65 Nr kol. 1807 Tomasz FIGLUS, Piotr FOLĘGA, Piotr CZECH, Grzegorz WOJNAR WYKORZYSTANIE MES DO WYZNACZANIA WPŁYWU PĘKNIĘCIA W STOPIE ZĘBA
ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2009 Seria: TRANSPORT z. 65 Nr kol. 1807 Tomasz FIGLUS, Piotr FOLĘGA, Piotr CZECH, Grzegorz WOJNAR WYKORZYSTANIE MES DO WYZNACZANIA WPŁYWU PĘKNIĘCIA W STOPIE ZĘBA
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY
 ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie UNIWERSYT E ZACHODNIOPOMOR T T E CH LOGICZNY W SZCZECINIE NO SKI KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZAKŁAD PODSTAW KONSTRUKCJI MASZYN
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie UNIWERSYT E ZACHODNIOPOMOR T T E CH LOGICZNY W SZCZECINIE NO SKI KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZAKŁAD PODSTAW KONSTRUKCJI MASZYN
PROBLEMY GENERACJI SIATKI MES DLA KÓŁ ZĘBATYCH
 XLII Sympozjon Modelowanie w mechanice Aleksander SŁADKOWSKI, Katedra Transportu Szynowego, Politechnika Śląska Marek SITARZ, Katedra Transportu Szynowego, Politechnika Śląska Jerzy SŁADKOWSKI, Ukraiński
XLII Sympozjon Modelowanie w mechanice Aleksander SŁADKOWSKI, Katedra Transportu Szynowego, Politechnika Śląska Marek SITARZ, Katedra Transportu Szynowego, Politechnika Śląska Jerzy SŁADKOWSKI, Ukraiński
Geometria analityczna
 Geometria analityczna Paweł Mleczko Teoria Informacja (o prostej). postać ogólna prostej: Ax + By + C = 0, A + B 0, postać kanoniczna (kierunkowa) prostej: y = ax + b. Współczynnik a nazywamy współczynnikiem
Geometria analityczna Paweł Mleczko Teoria Informacja (o prostej). postać ogólna prostej: Ax + By + C = 0, A + B 0, postać kanoniczna (kierunkowa) prostej: y = ax + b. Współczynnik a nazywamy współczynnikiem
Koła stożkowe o zębach skośnych i krzywoliniowych oraz odpowiadające im zastępcze koła walcowe wytrzymałościowo równoważne
 Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
PORÓWNANIE NARZĘDZI DOSTĘPNYCH W OBSZARZE ROBOCZYM SZKICOWNIKA NX Z POLECENIAMI ZAWARTYMI W ANALOGICZNEJ PRZESTRZENI GEOMETRYCZNEJ CATIA V5
 PORÓWNANIE NARZĘDZI DOSTĘPNYCH W OBSZARZE ROBOCZYM SZKICOWNIKA NX Z POLECENIAMI ZAWARTYMI W ANALOGICZNEJ PRZESTRZENI GEOMETRYCZNEJ CATIA V5 Tworzenie profili o charakterystycznym kształcie NARZĘDZIA, KTÓRE
PORÓWNANIE NARZĘDZI DOSTĘPNYCH W OBSZARZE ROBOCZYM SZKICOWNIKA NX Z POLECENIAMI ZAWARTYMI W ANALOGICZNEJ PRZESTRZENI GEOMETRYCZNEJ CATIA V5 Tworzenie profili o charakterystycznym kształcie NARZĘDZIA, KTÓRE
ROZWIĄZANIA DO ZADAŃ
 TURNIRJ MATEMATYCZNY ELIPSA dla klas LO ROZWIĄZANIA DO ZADAŃ Zadanie. (2 pkt.) Dla jakich wartości parametru m (m R), część wspólna przedziałów A = (, m m i B = 2m 2, + ) jest zbiorem pustym? / Jeśli A
TURNIRJ MATEMATYCZNY ELIPSA dla klas LO ROZWIĄZANIA DO ZADAŃ Zadanie. (2 pkt.) Dla jakich wartości parametru m (m R), część wspólna przedziałów A = (, m m i B = 2m 2, + ) jest zbiorem pustym? / Jeśli A
A. fałszywa dla każdej liczby x.b. prawdziwa dla C. prawdziwa dla D. prawdziwa dla
 Zadanie 1 Liczba jest równa A. B. C. 10 D. Odpowiedź B. Zadanie 2 Liczba jest równa A. 3 B. 2 C. D. Odpowiedź D. Zadanie 3. Liczba jest równa Odpowiedź D. Zadanie 4. Liczba osobników pewnego zagrożonego
Zadanie 1 Liczba jest równa A. B. C. 10 D. Odpowiedź B. Zadanie 2 Liczba jest równa A. 3 B. 2 C. D. Odpowiedź D. Zadanie 3. Liczba jest równa Odpowiedź D. Zadanie 4. Liczba osobników pewnego zagrożonego
ROZWINIĘCIA POWIERZCHNI STOPNIA DRUGIEGO W OPARCIU O MIEJSCA GEOMETRYCZNE Z ZA- STOSOWANIEM PROGRAMU CABRI II PLUS.
 Anna BŁACH, Piotr DUDZIK, Anita PAWLAK Politechnika Śląska Ośrodek Geometrii i Grafiki Inżynierskiej ul. Krzywoustego 7 44-100 Gliwice tel./ fax: 0-32 237 26 58, e-mail: anna.blach@polsl.pl, piotr.dudzik@polsl.pl,
Anna BŁACH, Piotr DUDZIK, Anita PAWLAK Politechnika Śląska Ośrodek Geometrii i Grafiki Inżynierskiej ul. Krzywoustego 7 44-100 Gliwice tel./ fax: 0-32 237 26 58, e-mail: anna.blach@polsl.pl, piotr.dudzik@polsl.pl,
Geometria. Hiperbola
 Geometria. Hiperbola Definicja 1 Dano dwa punkty na płaszczyźnie: F 1 i F 2 oraz taką liczbę d, że F 1 F 2 > d > 0. Zbiór punktów płaszczyzny będących rozwiązaniami równania: XF 1 XF 2 = ±d. nazywamy hiperbolą.
Geometria. Hiperbola Definicja 1 Dano dwa punkty na płaszczyźnie: F 1 i F 2 oraz taką liczbę d, że F 1 F 2 > d > 0. Zbiór punktów płaszczyzny będących rozwiązaniami równania: XF 1 XF 2 = ±d. nazywamy hiperbolą.
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN
 POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN KOREKCJA ZAZĘBIENIA ĆWICZENIE LABORATORYJNE NR 5 Z PODSTAW KONSTRUKCJI MASZYN OPRACOWAŁ: dr inż. Jan KŁOPOCKI Gdańsk 2000
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN KOREKCJA ZAZĘBIENIA ĆWICZENIE LABORATORYJNE NR 5 Z PODSTAW KONSTRUKCJI MASZYN OPRACOWAŁ: dr inż. Jan KŁOPOCKI Gdańsk 2000
FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE
 Umiejętności opracowanie: Maria Lampert LISTA MOICH OSIĄGNIĘĆ FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE Co powinienem umieć Umiejętności znam podstawowe przekształcenia geometryczne: symetria osiowa i środkowa,
Umiejętności opracowanie: Maria Lampert LISTA MOICH OSIĄGNIĘĆ FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE Co powinienem umieć Umiejętności znam podstawowe przekształcenia geometryczne: symetria osiowa i środkowa,
GEOMETRIA ANALITYCZNA. Poziom podstawowy
 GEOMETRIA ANALITYCZNA Poziom podstawowy Zadanie (4 pkt.) Dana jest prosta k opisana równaniem ogólnym x + y 6. a) napisz równanie prostej k w postaci kierunkowej. b) podaj współczynnik kierunkowy prostej
GEOMETRIA ANALITYCZNA Poziom podstawowy Zadanie (4 pkt.) Dana jest prosta k opisana równaniem ogólnym x + y 6. a) napisz równanie prostej k w postaci kierunkowej. b) podaj współczynnik kierunkowy prostej
KLASA II TECHNIKUM POZIOM PODSTAWOWY PROPOZYCJA POZIOMÓW WYMAGAŃ
 KLASA II TECHNIKUM POZIOM PODSTAWOWY PROPOZYCJA POZIOMÓW WYMAGAŃ Wyróżnione zostały następujące wymagania programowe: konieczne (K), podstawowe (P), rozszerzające (R), dopełniające (D) i wykraczające (W).
KLASA II TECHNIKUM POZIOM PODSTAWOWY PROPOZYCJA POZIOMÓW WYMAGAŃ Wyróżnione zostały następujące wymagania programowe: konieczne (K), podstawowe (P), rozszerzające (R), dopełniające (D) i wykraczające (W).
11. Znajdż równanie prostej prostopadłej do prostej k i przechodzącej przez punkt A = (2;2).
.") 1. Narysuj poniższe figury: a), b), c) 2. Punkty A = (0;1) oraz B = (-1;0) należą do okręgu którego środek należy do prostej o równaniu x-2 = 0. Podaj równanie okręgu. 3. Znaleźć równanie okręgu przechodzącego
1. Narysuj poniższe figury: a), b), c) 2. Punkty A = (0;1) oraz B = (-1;0) należą do okręgu którego środek należy do prostej o równaniu x-2 = 0. Podaj równanie okręgu. 3. Znaleźć równanie okręgu przechodzącego
Model odpowiedzi i schemat oceniania do arkusza II
 Model odpowiedzi i schemat oceniania do arkusza II Zadanie 12 (3 pkt) Z warunków zadania : 2 AM = MB > > n Wprowadzenie oznaczeń, naprzykład: A = (x, y) i obliczenie współrzędnych wektorów n Obliczenie
Model odpowiedzi i schemat oceniania do arkusza II Zadanie 12 (3 pkt) Z warunków zadania : 2 AM = MB > > n Wprowadzenie oznaczeń, naprzykład: A = (x, y) i obliczenie współrzędnych wektorów n Obliczenie
składa się z m + 1 uporządkowanych niemalejąco liczb nieujemnych. Pomiędzy p, n i m zachodzi następująca zależność:
 TEMATYKA: Krzywe typu Splajn (Krzywe B sklejane) Ćwiczenia nr 8 Krzywe Bezier a mają istotne ograniczenie. Aby uzyskać kształt zawierający wiele punktów przegięcia niezbędna jest krzywa wysokiego stopnia.
TEMATYKA: Krzywe typu Splajn (Krzywe B sklejane) Ćwiczenia nr 8 Krzywe Bezier a mają istotne ograniczenie. Aby uzyskać kształt zawierający wiele punktów przegięcia niezbędna jest krzywa wysokiego stopnia.
Zestaw Obliczyć objętość równoległościanu zbudowanego na wektorach m, n, p jeśli wiadomo, że objętość równoległościanu zbudowanego na wektorach:
 Zestaw 9. Wykazać, że objętość równoległościanu zbudowanego na przekątnych ścian danego równoległościanu jest dwa razy większa od objętości równoległościanu danego.. Obliczyć objętość równoległościanu
Zestaw 9. Wykazać, że objętość równoległościanu zbudowanego na przekątnych ścian danego równoległościanu jest dwa razy większa od objętości równoległościanu danego.. Obliczyć objętość równoległościanu
KONKURS ZOSTAŃ PITAGORASEM MUM. Podstawowe własności figur geometrycznych na płaszczyźnie
 KONKURS ZOSTAŃ PITAGORASEM MUM ETAP I TEST II Podstawowe własności figur geometrycznych na płaszczyźnie 1. A. Stosunek pola koła wpisanego w kwadrat o boku długości 6 do pola koła opisanego na tym kwadracie
KONKURS ZOSTAŃ PITAGORASEM MUM ETAP I TEST II Podstawowe własności figur geometrycznych na płaszczyźnie 1. A. Stosunek pola koła wpisanego w kwadrat o boku długości 6 do pola koła opisanego na tym kwadracie
Przykład Łuk ze ściągiem, obciążenie styczne. D A
 Przykład 1.4. Łuk ze ściągiem, obciążenie styczne. Rysunek przedstawia łuk trójprzegubowy, kołowy, ze ściągiem. Łuk obciążony jest obciążeniem stycznym do łuku, o stałej gęstości na jednostkę długości
Przykład 1.4. Łuk ze ściągiem, obciążenie styczne. Rysunek przedstawia łuk trójprzegubowy, kołowy, ze ściągiem. Łuk obciążony jest obciążeniem stycznym do łuku, o stałej gęstości na jednostkę długości
Definicje i przykłady
 Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Rozdział 2. Krzywe stożkowe. 2.1 Elipsa. Krzywe stożkowe są zadane ogólnym równaniem kwadratowym na płaszczyźnie
 Rozdział Krzywe stożkowe Krzywe stożkowe są zadane ogólnym równaniem kwadratowym na płaszczyźnie x + By + Cxy + Dx + Ey + F = 0. (.) W zależności od relacji pomiędzy współczynnikami otrzymujemy elipsę,
Rozdział Krzywe stożkowe Krzywe stożkowe są zadane ogólnym równaniem kwadratowym na płaszczyźnie x + By + Cxy + Dx + Ey + F = 0. (.) W zależności od relacji pomiędzy współczynnikami otrzymujemy elipsę,
AutoCAD Mechanical - Konstruowanie przekładni zębatych i pasowych. Radosław JABŁOŃSKI Wydział Mechaniczny Technologiczny Politechnika Śląska, Gliwice
 AutoCAD Mechanical - Konstruowanie przekładni zębatych i pasowych Radosław JABŁOŃSKI Wydział Mechaniczny Technologiczny Politechnika Śląska, Gliwice Streszczenie: W artykule opisano funkcje wspomagające
AutoCAD Mechanical - Konstruowanie przekładni zębatych i pasowych Radosław JABŁOŃSKI Wydział Mechaniczny Technologiczny Politechnika Śląska, Gliwice Streszczenie: W artykule opisano funkcje wspomagające
Opis krzywych w przestrzeni 3D. Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej AGH
 Opis krzywych w przestrzeni 3D Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej AGH Krzywe Beziera W przypadku tych krzywych wektory styczne w punkach końcowych są określane bezpośrednio
Opis krzywych w przestrzeni 3D Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej AGH Krzywe Beziera W przypadku tych krzywych wektory styczne w punkach końcowych są określane bezpośrednio
RÓWNANIA RÓŻNICZKOWE WYKŁAD 4
 RÓWNANIA RÓŻNICZKOWE WYKŁAD 4 Obszar określoności równania Jeżeli występująca w równaniu y' f ( x, y) funkcja f jest ciągła, to równanie posiada rozwiązanie. Jeżeli f jest nieokreślona w punkcie (x 0,
RÓWNANIA RÓŻNICZKOWE WYKŁAD 4 Obszar określoności równania Jeżeli występująca w równaniu y' f ( x, y) funkcja f jest ciągła, to równanie posiada rozwiązanie. Jeżeli f jest nieokreślona w punkcie (x 0,
ZADANIA ZAMKNIETE W zadaniach 1-25 wybierz i zaznacz na karcie odpowiedzi poprawna
 Arkusz A06 2 Egzamin maturalny z matematyki Poziom podstawowy ZADANIA ZAMKNIETE W zadaniach 1-25 wybierz i zaznacz na karcie odpowiedzi poprawna odpowiedź Zadanie 1. (0-1) Wartość wyrażenia 1 3 + 1 + 3
Arkusz A06 2 Egzamin maturalny z matematyki Poziom podstawowy ZADANIA ZAMKNIETE W zadaniach 1-25 wybierz i zaznacz na karcie odpowiedzi poprawna odpowiedź Zadanie 1. (0-1) Wartość wyrażenia 1 3 + 1 + 3
Wskazówki do zadań testowych. Matura 2016
 Wskazówki do zadań testowych. Matura 2016 Zadanie 1 la każdej dodatniej liczby a iloraz jest równy.. C.. Korzystamy ze wzoru Zadanie 2 Liczba jest równa.. 2 C.. 3 Zadanie 3 Liczby a i c są dodatnie. Liczba
Wskazówki do zadań testowych. Matura 2016 Zadanie 1 la każdej dodatniej liczby a iloraz jest równy.. C.. Korzystamy ze wzoru Zadanie 2 Liczba jest równa.. 2 C.. 3 Zadanie 3 Liczby a i c są dodatnie. Liczba
MECHANIKA 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
KLUCZ PUNKTOWANIA ODPOWIEDZI
 Egzamin maturalny maj 009 MATEMATYKA POZIOM PODSTAWOWY KLUCZ PUNKTOWANIA ODPOWIEDZI Zadanie 1. Matematyka poziom podstawowy Wyznaczanie wartości funkcji dla danych argumentów i jej miejsca zerowego. Zdający
Egzamin maturalny maj 009 MATEMATYKA POZIOM PODSTAWOWY KLUCZ PUNKTOWANIA ODPOWIEDZI Zadanie 1. Matematyka poziom podstawowy Wyznaczanie wartości funkcji dla danych argumentów i jej miejsca zerowego. Zdający
OBLICZANIE KÓŁK ZĘBATYCH
 OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
Geometria w R 3. Iloczyn skalarny wektorów
 Geometria w R 3 Andrzej Musielak Str 1 Geometria w R 3 Działania na wektorach Wektory w R 3 możemy w naturalny sposób dodawać i odejmować, np.: [2, 3, 1] + [ 1, 2, 1] = [1, 5, 2] [2, 3, 1] [ 1, 2, 1] =
Geometria w R 3 Andrzej Musielak Str 1 Geometria w R 3 Działania na wektorach Wektory w R 3 możemy w naturalny sposób dodawać i odejmować, np.: [2, 3, 1] + [ 1, 2, 1] = [1, 5, 2] [2, 3, 1] [ 1, 2, 1] =
Rok akademicki 2005/2006
 GEOMETRIA WYKREŚLNA ĆWICZENIA ZESTAW I Rok akademicki 2005/2006 Zadanie I. 1. Według podanych współrzędnych punktów wykreślić je w przestrzeni (na jednym rysunku aksonometrycznym) i określić, gdzie w przestrzeni
GEOMETRIA WYKREŚLNA ĆWICZENIA ZESTAW I Rok akademicki 2005/2006 Zadanie I. 1. Według podanych współrzędnych punktów wykreślić je w przestrzeni (na jednym rysunku aksonometrycznym) i określić, gdzie w przestrzeni
Projekt połowicznej, prostej endoprotezy stawu biodrowego w programie SOLIDWorks.
 1 Projekt połowicznej, prostej endoprotezy stawu biodrowego w programie SOLIDWorks. Rysunek. Widok projektowanej endoprotezy według normy z wymiarami charakterystycznymi. 2 3 Rysunek. Ilustracje pomocnicze
1 Projekt połowicznej, prostej endoprotezy stawu biodrowego w programie SOLIDWorks. Rysunek. Widok projektowanej endoprotezy według normy z wymiarami charakterystycznymi. 2 3 Rysunek. Ilustracje pomocnicze
Modelowanie krzywych i powierzchni
 3 Modelowanie krzywych i powierzchni Modelowanie powierzchniowe jest kolejną metodą po modelowaniu bryłowym sposobem tworzenia części. Jest to też sposób budowy elementu bardziej skomplikowany i wymagający
3 Modelowanie krzywych i powierzchni Modelowanie powierzchniowe jest kolejną metodą po modelowaniu bryłowym sposobem tworzenia części. Jest to też sposób budowy elementu bardziej skomplikowany i wymagający
Politechnika Białostocka INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Temat ćwiczenia: Próba skręcania pręta o przekroju okrągłym Numer ćwiczenia: 4 Laboratorium z
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Temat ćwiczenia: Próba skręcania pręta o przekroju okrągłym Numer ćwiczenia: 4 Laboratorium z
Ćwiczenia nr 7. TEMATYKA: Krzywe Bézier a
 TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
PRÓBNY EGZAMIN MATURALNY Z MATEMATYKI
 WPISUJE ZDAJĄCY KOD PESEL PRÓBNY EGZAMIN MATURALNY Z MATEMATYKI POZIOM ROZSZERZONY PRZED MATURĄ MAJ 2015 1. Sprawdź, czy arkusz egzaminacyjny zawiera 22 strony ( zadania 1 19). Ewentualny brak zgłoś przewodniczącemu
WPISUJE ZDAJĄCY KOD PESEL PRÓBNY EGZAMIN MATURALNY Z MATEMATYKI POZIOM ROZSZERZONY PRZED MATURĄ MAJ 2015 1. Sprawdź, czy arkusz egzaminacyjny zawiera 22 strony ( zadania 1 19). Ewentualny brak zgłoś przewodniczącemu
Wykład 16. P 2 (x 2, y 2 ) P 1 (x 1, y 1 ) OX. Odległość tych punktów wyraża się wzorem: P 1 P 2 = (x 1 x 2 ) 2 + (y 1 y 2 ) 2
 P 1 (x 1, y 1 ) OX. Odległość tych punktów wyraża się wzorem: P 1 P 2 = (x 1 x 2 ) 2 + (y 1 y 2 ) 2") Wykład 16 Geometria analityczna Przegląd wiadomości z geometrii analitycznej na płaszczyźnie rtokartezjański układ współrzędnych powstaje przez ustalenie punktu początkowego zwanego początkiem układu współrzędnych
Wykład 16 Geometria analityczna Przegląd wiadomości z geometrii analitycznej na płaszczyźnie rtokartezjański układ współrzędnych powstaje przez ustalenie punktu początkowego zwanego początkiem układu współrzędnych
KONSTRUKCJA TRÓJKĄTA 1 KONSTRUKCJA TRÓJKĄTA 2 KONSTRUKCJA CZWOROKĄTA KONSTRUKCJA OKRĘGU KONSTRUKCJA STYCZNYCH
 Wstęp Ten multimedialny program edukacyjny zawiera zadania konstrukcyjne pozwalające na samodzielne ćwiczenie i sprawdzenie wiadomości w zakresie konstrukcji podstawowych figur geometrycznych. Jest przeznaczony
Wstęp Ten multimedialny program edukacyjny zawiera zadania konstrukcyjne pozwalające na samodzielne ćwiczenie i sprawdzenie wiadomości w zakresie konstrukcji podstawowych figur geometrycznych. Jest przeznaczony
Zadania do samodzielnego rozwiązania zestaw 11
 Zadania do samodzielnego rozwiązania zestaw 11 1 Podać definicję pochodnej funkcji w punkcie, a następnie korzystając z tej definicji obliczyć ( ) π (a) f, jeśli f(x) = cos x, (e) f (0), jeśli f(x) = 4
Zadania do samodzielnego rozwiązania zestaw 11 1 Podać definicję pochodnej funkcji w punkcie, a następnie korzystając z tej definicji obliczyć ( ) π (a) f, jeśli f(x) = cos x, (e) f (0), jeśli f(x) = 4
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY
 ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie UNIWERSYT E ZACHODNIOPOMOR T T E CH LOGICZNY W SZCZECINIE NO SKI KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZAKŁAD PODSTAW KONSTRUKCJI MASZYN
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie UNIWERSYT E ZACHODNIOPOMOR T T E CH LOGICZNY W SZCZECINIE NO SKI KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZAKŁAD PODSTAW KONSTRUKCJI MASZYN
MECHANIKA 2 KINEMATYKA. Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
KORESPONDENCYJNY KURS Z MATEMATYKI. PRACA KONTROLNA nr 1
 KORESPONDENCYJNY KURS Z MATEMATYKI PRACA KONTROLNA nr 1 październik 000r 1. Suma wszystkich wyrazów nieskończonego ciągu geometrycznego wynosi 040. Jeśli pierwszy wyraz tego ciągu zmniejszymy o 17, a jego
KORESPONDENCYJNY KURS Z MATEMATYKI PRACA KONTROLNA nr 1 październik 000r 1. Suma wszystkich wyrazów nieskończonego ciągu geometrycznego wynosi 040. Jeśli pierwszy wyraz tego ciągu zmniejszymy o 17, a jego
Przykład 4.1. Ściag stalowy. L200x100x cm 10 cm I120. Obliczyć dopuszczalną siłę P rozciagającą ściąg stalowy o przekroju pokazanym na poniższym
 Przykład 4.1. Ściag stalowy Obliczyć dopuszczalną siłę P rozciagającą ściąg stalowy o przekroju pokazanym na poniższym rysunku jeśli naprężenie dopuszczalne wynosi 15 MPa. Szukana siła P przyłożona jest
Przykład 4.1. Ściag stalowy Obliczyć dopuszczalną siłę P rozciagającą ściąg stalowy o przekroju pokazanym na poniższym rysunku jeśli naprężenie dopuszczalne wynosi 15 MPa. Szukana siła P przyłożona jest
Metody numeryczne Wykład 4
 Metody numeryczne Wykład 4 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Zakres wykładu Metody skończone rozwiązywania
Metody numeryczne Wykład 4 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Zakres wykładu Metody skończone rozwiązywania
8. PODSTAWY ANALIZY NIELINIOWEJ
 8. PODSTAWY ANALIZY NIELINIOWEJ 1 8. 8. PODSTAWY ANALIZY NIELINIOWEJ 8.1. Wprowadzenie Zadania nieliniowe mają swoje zastosowanie na przykład w rozwiązywaniu cięgien. Przyczyny nieliniowości: 1) geometryczne:
8. PODSTAWY ANALIZY NIELINIOWEJ 1 8. 8. PODSTAWY ANALIZY NIELINIOWEJ 8.1. Wprowadzenie Zadania nieliniowe mają swoje zastosowanie na przykład w rozwiązywaniu cięgien. Przyczyny nieliniowości: 1) geometryczne:
2. Pręt skręcany o przekroju kołowym
 2. Pręt skręcany o przekroju kołowym Przebieg wykładu : 1. Sformułowanie zagadnienia 2. Warunki równowagi kąt skręcenia 3. Warunek geometryczny kąt odkształcenia postaciowego 4. Związek fizyczny Prawo
2. Pręt skręcany o przekroju kołowym Przebieg wykładu : 1. Sformułowanie zagadnienia 2. Warunki równowagi kąt skręcenia 3. Warunek geometryczny kąt odkształcenia postaciowego 4. Związek fizyczny Prawo
WYZNACZANIE ZA POMOCĄ MEB WPŁYWU PĘKNIĘCIA U PODSTAWY ZĘBA NA ZMIANĘ SZTYWNOŚCI ZAZĘBIENIA
 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2009 Seria: TRANSPORT z. 65 Nr kol. 1807 Piotr FOLĘGA, Piotr CZECH, Tomasz FIGLUS, Grzegorz WOJNAR WYZNACZANIE ZA POMOCĄ MEB WPŁYWU PĘKNIĘCIA U PODSTAWY ZĘBA NA ZMIANĘ
ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2009 Seria: TRANSPORT z. 65 Nr kol. 1807 Piotr FOLĘGA, Piotr CZECH, Tomasz FIGLUS, Grzegorz WOJNAR WYZNACZANIE ZA POMOCĄ MEB WPŁYWU PĘKNIĘCIA U PODSTAWY ZĘBA NA ZMIANĘ
Geometria. Rozwiązania niektórych zadań z listy 2
 Geometria. Rozwiązania niektórych zadań z listy 2 Inne rozwiązanie zadania 2. (Wyznaczyć równanie stycznej do elipsy x 2 a 2 + y2 b 2 = 1 w dowolnym jej punkcie (x 0, y 0 ). ) Przypuśćmy, że krzywa na
Geometria. Rozwiązania niektórych zadań z listy 2 Inne rozwiązanie zadania 2. (Wyznaczyć równanie stycznej do elipsy x 2 a 2 + y2 b 2 = 1 w dowolnym jej punkcie (x 0, y 0 ). ) Przypuśćmy, że krzywa na
LUBELSKA PRÓBA PRZED MATURĄ 09 MARCA Kartoteka testu. Maksymalna liczba punktów. Nr zad. Matematyka dla klasy 3 poziom podstawowy
 Matematyka dla klasy poziom podstawowy LUBELSKA PRÓBA PRZED MATURĄ 09 MARCA 06 Kartoteka testu Nr zad Wymaganie ogólne. II. Wykorzystanie i interpretowanie reprezentacji.. II. Wykorzystanie i interpretowanie
Matematyka dla klasy poziom podstawowy LUBELSKA PRÓBA PRZED MATURĄ 09 MARCA 06 Kartoteka testu Nr zad Wymaganie ogólne. II. Wykorzystanie i interpretowanie reprezentacji.. II. Wykorzystanie i interpretowanie
LUBELSKA PRÓBA PRZED MATURĄ klasa 2 poziom podstawowy
 Kod ucznia.. M A T E M A T Y K A klasa 2 - pp MAJ 2019 Instrukcja dla zdającego Czas pracy: 170 minut 1. Sprawdź, czy arkusz zawiera 16 stron. Ewentualny brak zgłoś przewodniczącemu zespołu nadzorującego
Kod ucznia.. M A T E M A T Y K A klasa 2 - pp MAJ 2019 Instrukcja dla zdającego Czas pracy: 170 minut 1. Sprawdź, czy arkusz zawiera 16 stron. Ewentualny brak zgłoś przewodniczącemu zespołu nadzorującego
Nazwisko i imię.. PRÓBNY EGZAMIN MATURALNY Z MATEMATYKI
 Klasa Nazwisko i imię.. PRÓBNY EGZAMIN MATURALNY Z MATEMATYKI POZIOM PODSTAWOWY Czas pracy 170 minut MARZEC ROK 2019 Instrukcja dla zdającego 1. Sprawdź, czy arkusz egzaminacyjny zawiera 22 strony (zadania
Klasa Nazwisko i imię.. PRÓBNY EGZAMIN MATURALNY Z MATEMATYKI POZIOM PODSTAWOWY Czas pracy 170 minut MARZEC ROK 2019 Instrukcja dla zdającego 1. Sprawdź, czy arkusz egzaminacyjny zawiera 22 strony (zadania
R o z w i ą z a n i e Przy zastosowaniu sposobu analitycznego należy wyznaczyć składowe wypadkowej P x i P y
 Przykład 1 Dane są trzy siły: P 1 = 3i + 4j, P 2 = 2i 5j, P 3 = 7i + 3j (składowe sił wyrażone są w niutonach), przecinające się w punkcie A (1, 2). Wyznaczyć wektor wypadkowej i jej wartość oraz kąt α
Przykład 1 Dane są trzy siły: P 1 = 3i + 4j, P 2 = 2i 5j, P 3 = 7i + 3j (składowe sił wyrażone są w niutonach), przecinające się w punkcie A (1, 2). Wyznaczyć wektor wypadkowej i jej wartość oraz kąt α
Siły wewnętrzne - związki różniczkowe
 Siły wewnętrzne - związki różniczkowe Weźmy dowolny fragment belki obciążony wzdłuż osi obciążeniem n(x) oraz poprzecznie obciążeniem q(x). Na powyższym rysunku zwroty obciążeń są zgodne z dodatnimi zwrotami
Siły wewnętrzne - związki różniczkowe Weźmy dowolny fragment belki obciążony wzdłuż osi obciążeniem n(x) oraz poprzecznie obciążeniem q(x). Na powyższym rysunku zwroty obciążeń są zgodne z dodatnimi zwrotami
PRÓBNA MATURA ZADANIA PRZYKŁADOWE
 ZESPÓŁ SZKÓŁ HOTELARSKO TURYSTYCZNO GASTRONOMICZNYCH NR UL. KRASNOŁĘCKA 3, WARSZAWA Z A D AN I A Z A M K N I Ę T E ) Liczba, której 5% jest równe 6, to : A. 0,3 C. 30. D. 0 5% 6 II sposób: x nieznana liczba
ZESPÓŁ SZKÓŁ HOTELARSKO TURYSTYCZNO GASTRONOMICZNYCH NR UL. KRASNOŁĘCKA 3, WARSZAWA Z A D AN I A Z A M K N I Ę T E ) Liczba, której 5% jest równe 6, to : A. 0,3 C. 30. D. 0 5% 6 II sposób: x nieznana liczba
Instrukcja do ćwiczeń laboratoryjnych Numeryczne metody analizy konstrukcji
 POLITECHNIKA SZCZECIŃSKA KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN Ćwiczenie nr 7 Instrukcja do ćwiczeń laboratoryjnych Numeryczne metody analizy konstrukcji Analiza statyczna obciążonego kątownika
POLITECHNIKA SZCZECIŃSKA KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN Ćwiczenie nr 7 Instrukcja do ćwiczeń laboratoryjnych Numeryczne metody analizy konstrukcji Analiza statyczna obciążonego kątownika
PRÓBNA MATURA ZADANIA PRZYKŁADOWE
 ZESPÓŁ SZKÓŁ HOTELARSKO TURYSTYCZNO GASTRONOMICZNYCH NR UL. KRASNOŁĘCKA, WARSZAWA Z A D AN I A Z A M K N I Ę T E ) Liczba, której 5% jest równe 6, to : A. 0, C. 0. D. 0 5% 6 II sposób: x nieznana liczba
ZESPÓŁ SZKÓŁ HOTELARSKO TURYSTYCZNO GASTRONOMICZNYCH NR UL. KRASNOŁĘCKA, WARSZAWA Z A D AN I A Z A M K N I Ę T E ) Liczba, której 5% jest równe 6, to : A. 0, C. 0. D. 0 5% 6 II sposób: x nieznana liczba
Poniżej przedstawiony został podział wymagań na poszczególne oceny szkolne:
 Prosto do matury klasa d Rok szkolny 014/015 WYMAGANIA EDUKACYJNE Wyróżnione zostały następujące wymagania programowe: konieczne (K), podstawowe (P), rozszerzające (R), dopełniające (D) i wykraczające
Prosto do matury klasa d Rok szkolny 014/015 WYMAGANIA EDUKACYJNE Wyróżnione zostały następujące wymagania programowe: konieczne (K), podstawowe (P), rozszerzające (R), dopełniające (D) i wykraczające
ODPOWIEDZI I SCHEMAT PUNKTOWANIA ZESTAW NR 2 POZIOM PODSTAWOWY. Etapy rozwiązania zadania
 Przykładowy zestaw zadań nr z matematyki ODPOWIEDZI I SCHEMAT PUNKTOWANIA ZESTAW NR POZIOM PODSTAWOWY Nr zadania Nr czynności Etapy rozwiązania zadania Liczba punktów Uwagi. Podanie dziedziny funkcji f:
Przykładowy zestaw zadań nr z matematyki ODPOWIEDZI I SCHEMAT PUNKTOWANIA ZESTAW NR POZIOM PODSTAWOWY Nr zadania Nr czynności Etapy rozwiązania zadania Liczba punktów Uwagi. Podanie dziedziny funkcji f:
Projektowanie walcowych przekładni zębatych o zmiennym przełożeniu
 Projektowanie walcowych przekładni zębatych o zmiennym przełożeniu Igor Zarębski Opiekun naukowy: dr hab. inż.. Tadeusz Sałaciński Cele pracy Zbadanie zagadnień związanych z projektowaniem walcowych przekładni
Projektowanie walcowych przekładni zębatych o zmiennym przełożeniu Igor Zarębski Opiekun naukowy: dr hab. inż.. Tadeusz Sałaciński Cele pracy Zbadanie zagadnień związanych z projektowaniem walcowych przekładni
Krzywe stożkowe Lekcja II: Okrąg i jego opis w różnych układach współrzędnych
 Krzywe stożkowe Lekcja II: Okrąg i jego opis w różnych układach współrzędnych Wydział Matematyki Politechniki Wrocławskiej Okrąg Okrąg jest szczególną krzywą stożkową. Wyznacza nam koło, które jest podstawą
Krzywe stożkowe Lekcja II: Okrąg i jego opis w różnych układach współrzędnych Wydział Matematyki Politechniki Wrocławskiej Okrąg Okrąg jest szczególną krzywą stożkową. Wyznacza nam koło, które jest podstawą
Praca kontrolna z matematyki nr 1 Liceum Ogólnokształcące dla Dorosłych Semestr 5 Rok szkolny 2014/2015
 Praca kontrolna z matematyki nr 1 Liceum Ogólnokształcące dla Dorosłych Semestr 5 Rok szkolny 2014/2015 2 6 + 3 1. Oblicz 3. 3 x 1 3x 2. Rozwiąż nierówność > x. 2 3 3. Funkcja f przyporządkowuje każdej
Praca kontrolna z matematyki nr 1 Liceum Ogólnokształcące dla Dorosłych Semestr 5 Rok szkolny 2014/2015 2 6 + 3 1. Oblicz 3. 3 x 1 3x 2. Rozwiąż nierówność > x. 2 3 3. Funkcja f przyporządkowuje każdej
Projektowanie walcowych przekładni zębatych o zmieniającym się przełożeniu. Igor Zarębski Promotor: dr hab. inż. Tadeusz Sałaciński
 Projektowanie walcowych przekładni zębatych o zmieniającym się przełożeniu Igor Zarębski Promotor: dr hab. inż. Tadeusz Sałaciński Zarys historyczny Idea przekładni zębatych o zmiennym przełożeniu, opartych
Projektowanie walcowych przekładni zębatych o zmieniającym się przełożeniu Igor Zarębski Promotor: dr hab. inż. Tadeusz Sałaciński Zarys historyczny Idea przekładni zębatych o zmiennym przełożeniu, opartych
WYKORZYSTANIE MSC.MARC DLA ANALIZY WSPÓŁPRACY KONTAKTOWEJ KOŁA I SZYNY
 WYKORZYSTANIE MSC.MARC DLA ANALIZY WSPÓŁPRACY KONTAKTOWEJ KOŁA I SZYNY Aleksander Sładkowski Tomasz Kuminek Politechnika Śląska (Katowice) 1. Wstęp Modelowanie współpracy kontaktowej systemu koło szyna
WYKORZYSTANIE MSC.MARC DLA ANALIZY WSPÓŁPRACY KONTAKTOWEJ KOŁA I SZYNY Aleksander Sładkowski Tomasz Kuminek Politechnika Śląska (Katowice) 1. Wstęp Modelowanie współpracy kontaktowej systemu koło szyna
Geometria powłoki, wg publikacji dr inż. Wiesław Baran
 Geometria powłoki, wg publikacji dr inż. Wiesław Baran Gładką i regularną powierzchnię środkową S powłoki można opisać za pomocą funkcji wektorowej (rys. 2.1) dwóch współrzędnych krzywoliniowych u 1 i
Geometria powłoki, wg publikacji dr inż. Wiesław Baran Gładką i regularną powierzchnię środkową S powłoki można opisać za pomocą funkcji wektorowej (rys. 2.1) dwóch współrzędnych krzywoliniowych u 1 i
Osiadanie kołowego fundamentu zbiornika
 Przewodnik Inżyniera Nr 22 Aktualizacja: 01/2017 Osiadanie kołowego fundamentu zbiornika Program: MES Plik powiązany: Demo_manual_22.gmk Celem przedmiotowego przewodnika jest przedstawienie analizy osiadania
Przewodnik Inżyniera Nr 22 Aktualizacja: 01/2017 Osiadanie kołowego fundamentu zbiornika Program: MES Plik powiązany: Demo_manual_22.gmk Celem przedmiotowego przewodnika jest przedstawienie analizy osiadania
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Rysowanie precyzyjne. Polecenie:
 7 Rysowanie precyzyjne W ćwiczeniu tym pokazane zostaną różne techniki bardzo dokładnego rysowania obiektów w programie AutoCAD 2010, między innymi wykorzystanie punktów charakterystycznych. Z uwagi na
7 Rysowanie precyzyjne W ćwiczeniu tym pokazane zostaną różne techniki bardzo dokładnego rysowania obiektów w programie AutoCAD 2010, między innymi wykorzystanie punktów charakterystycznych. Z uwagi na
str 1 WYMAGANIA EDUKACYJNE ( ) - matematyka - poziom podstawowy Dariusz Drabczyk
 - matematyka - poziom podstawowy Dariusz Drabczyk") str 1 WYMAGANIA EDUKACYJNE (2017-2018) - matematyka - poziom podstawowy Dariusz Drabczyk Klasa 3e: wpisy oznaczone jako: (T) TRYGONOMETRIA, (PII) PLANIMETRIA II, (RP) RACHUNEK PRAWDOPODOBIEŃSTWA, (ST)
str 1 WYMAGANIA EDUKACYJNE (2017-2018) - matematyka - poziom podstawowy Dariusz Drabczyk Klasa 3e: wpisy oznaczone jako: (T) TRYGONOMETRIA, (PII) PLANIMETRIA II, (RP) RACHUNEK PRAWDOPODOBIEŃSTWA, (ST)
I. Funkcja kwadratowa
 Pojęcia, wymagania i przykładowe zadania na egzamin poprawkowy w roku szkolnym 2018/2019 w CKZiU nr 3 Ekonomik w Zielonej Górze KLASA III fl POZIOM PODSTAWOWY I. Funkcja kwadratowa narysować wykres funkcji
Pojęcia, wymagania i przykładowe zadania na egzamin poprawkowy w roku szkolnym 2018/2019 w CKZiU nr 3 Ekonomik w Zielonej Górze KLASA III fl POZIOM PODSTAWOWY I. Funkcja kwadratowa narysować wykres funkcji
ARKUSZ II
 www.galileusz.com.pl ARKUSZ II W każdym z zadań 1.-24. wybierz i zaznacz jedną poprawną odpowiedź. Zadanie 1. (0-1 pkt) Liczba 30 to p% liczby 80, zatem A) p = 44,(4)% B) p > 44,(4)% C) p = 43,(4)% D)
www.galileusz.com.pl ARKUSZ II W każdym z zadań 1.-24. wybierz i zaznacz jedną poprawną odpowiedź. Zadanie 1. (0-1 pkt) Liczba 30 to p% liczby 80, zatem A) p = 44,(4)% B) p > 44,(4)% C) p = 43,(4)% D)
WYZNACZANIE LUZU OBWODOWEGO W ZAZĘBIENIU KÓŁ PRZEKŁADNI FALOWEJ
 ZESZYTY NAUKOWE POLITECHNIKI RZESZOWSKIEJ 298, Mechanika 90 RUTMech, t. XXXV, z. 90 (4/18), październik-grudzień 2018, s. 481-489 Adam KALINA 1 Aleksander MAZURKOW 2 Stanisław WARCHOŁ 3 WYZNACZANIE LUZU
ZESZYTY NAUKOWE POLITECHNIKI RZESZOWSKIEJ 298, Mechanika 90 RUTMech, t. XXXV, z. 90 (4/18), październik-grudzień 2018, s. 481-489 Adam KALINA 1 Aleksander MAZURKOW 2 Stanisław WARCHOŁ 3 WYZNACZANIE LUZU
PRÓBNY EGZAMIN MATURALNY Z MATEMATYKI poziom rozszerzony
 Próbny egzamin maturalny z matematyki. Poziom rozszerzony 1 PRÓNY EGZMIN MTURLNY Z MTEMTYKI poziom rozszerzony ZNI ZMKNIĘTE W każdym z zadań 1.. wybierz i zaznacz jedną poprawną odpowiedź. Zadanie 1. (0
Próbny egzamin maturalny z matematyki. Poziom rozszerzony 1 PRÓNY EGZMIN MTURLNY Z MTEMTYKI poziom rozszerzony ZNI ZMKNIĘTE W każdym z zadań 1.. wybierz i zaznacz jedną poprawną odpowiedź. Zadanie 1. (0
Podstawy Konstrukcji Maszyn
 0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
XV WOJEWÓDZKI KONKURS Z MATEMATYKI
 XV WOJEWÓDZKI KONKURS Z MATEMATYKI DLA UCZNIÓW DOTYCHCZASOWYCH GIMNAZJÓW ORAZ KLAS DOTYCHCZASOWYCH GIMNAZJÓW PROWADZONYCH W SZKOŁACH INNEGO TYPU WOJEWÓDZTWA ŚWIĘTOKRZYSKIEGO W ROKU SZKOLNYM 2017/2018 ETAP
XV WOJEWÓDZKI KONKURS Z MATEMATYKI DLA UCZNIÓW DOTYCHCZASOWYCH GIMNAZJÓW ORAZ KLAS DOTYCHCZASOWYCH GIMNAZJÓW PROWADZONYCH W SZKOŁACH INNEGO TYPU WOJEWÓDZTWA ŚWIĘTOKRZYSKIEGO W ROKU SZKOLNYM 2017/2018 ETAP
STEREOMETRIA CZYLI GEOMETRIA W 3 WYMIARACH
 STEREOMETRIA CZYLI GEOMETRIA W 3 WYMIARACH Stereometria jest działem geometrii, którego przedmiotem badań są bryły przestrzenne oraz ich właściwości. WZAJEMNE POŁOŻENIE PROSTYCH W PRZESTRZENI 2 proste
STEREOMETRIA CZYLI GEOMETRIA W 3 WYMIARACH Stereometria jest działem geometrii, którego przedmiotem badań są bryły przestrzenne oraz ich właściwości. WZAJEMNE POŁOŻENIE PROSTYCH W PRZESTRZENI 2 proste
ZADANIA ZAMKNIETE W zadaniach 1-25 wybierz i zaznacz na karcie odpowiedzi poprawna
 Arkusz A05 2 Egzamin maturalny z matematyki Poziom podstawowy ZADANIA ZAMKNIETE W zadaniach 1-25 wybierz i zaznacz na karcie odpowiedzi poprawna odpowiedź Zadanie 1. (0-1) Ułamek 5+2 5 2 ma wartość: A.
Arkusz A05 2 Egzamin maturalny z matematyki Poziom podstawowy ZADANIA ZAMKNIETE W zadaniach 1-25 wybierz i zaznacz na karcie odpowiedzi poprawna odpowiedź Zadanie 1. (0-1) Ułamek 5+2 5 2 ma wartość: A.
Rachunek całkowy - całka oznaczona
 SPIS TREŚCI. 2. CAŁKA OZNACZONA: a. Związek między całką oznaczoną a nieoznaczoną. b. Definicja całki oznaczonej. c. Własności całek oznaczonych. d. Zastosowanie całek oznaczonych. e. Zamiana zmiennej
SPIS TREŚCI. 2. CAŁKA OZNACZONA: a. Związek między całką oznaczoną a nieoznaczoną. b. Definicja całki oznaczonej. c. Własności całek oznaczonych. d. Zastosowanie całek oznaczonych. e. Zamiana zmiennej
Metody numeryczne I Równania nieliniowe
 Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
MATEMATYKA WYKAZ UMIEJĘTNOŚCI WYMAGANYCH NA POSZCZEGÓLNE OCENY DLA KLASY DRUGIEJ
 MATEMATYKA WYKAZ UMIEJĘTNOŚCI WYMAGANYCH NA POSZCZEGÓLNE OCENY 1. SUMY ALGEBRAICZNE DLA KLASY DRUGIEJ 1. Rozpoznawanie jednomianów i sum algebraicznych Obliczanie wartości liczbowych wyrażeń algebraicznych
MATEMATYKA WYKAZ UMIEJĘTNOŚCI WYMAGANYCH NA POSZCZEGÓLNE OCENY 1. SUMY ALGEBRAICZNE DLA KLASY DRUGIEJ 1. Rozpoznawanie jednomianów i sum algebraicznych Obliczanie wartości liczbowych wyrażeń algebraicznych
STATYCZNA PRÓBA SKRĘCANIA
 Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego: Wprowadzenie STATYCZNA PRÓBA SKRĘCANIA Opracowała: mgr inż. Magdalena Bartkowiak-Jowsa Skręcanie pręta występuje w przypadku
Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego: Wprowadzenie STATYCZNA PRÓBA SKRĘCANIA Opracowała: mgr inż. Magdalena Bartkowiak-Jowsa Skręcanie pręta występuje w przypadku
GEOMETRIA ELEMENTARNA
 Bardo, 7 11 XII A. D. 2016 I Uniwersytecki Obóz Olimpiady Matematycznej GEOMETRIA ELEMENTARNA materiały przygotował Antoni Kamiński na podstawie zbiorów zadań: Przygotowanie do olimpiad matematycznych
Bardo, 7 11 XII A. D. 2016 I Uniwersytecki Obóz Olimpiady Matematycznej GEOMETRIA ELEMENTARNA materiały przygotował Antoni Kamiński na podstawie zbiorów zadań: Przygotowanie do olimpiad matematycznych
Wymagania na egzamin poprawkowy z matematyki dla klasy I C LO (Rok szkolny 2015/16) Wykaz zakładanych osiągnięć ucznia klasy I liceum
 Wykaz zakładanych osiągnięć ucznia klasy I liceum") Wymagania na egzamin poprawkowy z matematyki dla klasy I C LO (Rok szkolny 05/6) Wykaz zakładanych osiągnięć ucznia klasy I liceum (osiągnięcia ucznia w zakresie podstawowym) I. Liczby rzeczywiste. Język
Wymagania na egzamin poprawkowy z matematyki dla klasy I C LO (Rok szkolny 05/6) Wykaz zakładanych osiągnięć ucznia klasy I liceum (osiągnięcia ucznia w zakresie podstawowym) I. Liczby rzeczywiste. Język
Arkusz maturalny nr 2 poziom podstawowy ZADANIA ZAMKNIĘTE. Rozwiązania. Wartość bezwzględna jest odległością na osi liczbowej.
 Arkusz maturalny nr 2 poziom podstawowy ZADANIA ZAMKNIĘTE Rozwiązania Zadanie 1 Wartość bezwzględna jest odległością na osi liczbowej. Stop Istnieje wzajemnie jednoznaczne przyporządkowanie między punktami
Arkusz maturalny nr 2 poziom podstawowy ZADANIA ZAMKNIĘTE Rozwiązania Zadanie 1 Wartość bezwzględna jest odległością na osi liczbowej. Stop Istnieje wzajemnie jednoznaczne przyporządkowanie między punktami
LUBELSKA PRÓBA PRZED MATURĄ 2013
 LUBELSKA PRÓBA PRZED MATURĄ 03 MATEMATYKA - poziom podstawowy STYCZEŃ 03 Instrukcja dla zdającego Czas pracy: 70 minut. Sprawdź, czy arkusz zawiera 4 stron.. Rozwiązania zadań i odpowiedzi zamieść w miejscu
LUBELSKA PRÓBA PRZED MATURĄ 03 MATEMATYKA - poziom podstawowy STYCZEŃ 03 Instrukcja dla zdającego Czas pracy: 70 minut. Sprawdź, czy arkusz zawiera 4 stron.. Rozwiązania zadań i odpowiedzi zamieść w miejscu
KGGiBM GRAFIKA INŻYNIERSKA Rok III, sem. VI, sem IV SN WILiŚ Rok akademicki 2011/2012
 Rysowanie precyzyjne 7 W ćwiczeniu tym pokazane zostaną wybrane techniki bardzo dokładnego rysowania obiektów w programie AutoCAD 2012, między innymi wykorzystanie punktów charakterystycznych. Narysować
Rysowanie precyzyjne 7 W ćwiczeniu tym pokazane zostaną wybrane techniki bardzo dokładnego rysowania obiektów w programie AutoCAD 2012, między innymi wykorzystanie punktów charakterystycznych. Narysować
Geometria analityczna - przykłady
 Geometria analityczna - przykłady 1. Znaleźć równanie ogólne i równania parametryczne prostej w R 2, któr przechodzi przez punkt ( 4, ) oraz (a) jest równoległa do prostej x + 5y 2 = 0. (b) jest prostopadła
Geometria analityczna - przykłady 1. Znaleźć równanie ogólne i równania parametryczne prostej w R 2, któr przechodzi przez punkt ( 4, ) oraz (a) jest równoległa do prostej x + 5y 2 = 0. (b) jest prostopadła
Skrypt 24. Geometria analityczna: Opracowanie L5
 Projekt Innowacyjny program nauczania matematyki dla liceów ogólnokształcących współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Skrypt 24 Geometria analityczna:
Projekt Innowacyjny program nauczania matematyki dla liceów ogólnokształcących współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Skrypt 24 Geometria analityczna:
MECHANIKA PRĘTÓW CIENKOŚCIENNYCH
 dr inż. Robert Szmit Przedmiot: MECHANIKA PRĘTÓW CIENKOŚCIENNYCH WYKŁAD nr Uniwersytet Warmińsko-Mazurski w Olsztynie Katedra Geotechniki i Mechaniki Budowli Opis stanu odkształcenia i naprężenia powłoki
dr inż. Robert Szmit Przedmiot: MECHANIKA PRĘTÓW CIENKOŚCIENNYCH WYKŁAD nr Uniwersytet Warmińsko-Mazurski w Olsztynie Katedra Geotechniki i Mechaniki Budowli Opis stanu odkształcenia i naprężenia powłoki
Matura z matematyki 1920 r.
 Matura z matematyki 1920 r. (źródło: Sprawozdanie Dyrekcji Państwowego Gimnazjum im. Karola Marcinkowskiego w Poznaniu: za 1-sze dziesięciolecie zakładu w niepodległej i wolnej ojczyźnie: 1919-1929) Żelazna
Matura z matematyki 1920 r. (źródło: Sprawozdanie Dyrekcji Państwowego Gimnazjum im. Karola Marcinkowskiego w Poznaniu: za 1-sze dziesięciolecie zakładu w niepodległej i wolnej ojczyźnie: 1919-1929) Żelazna
Zajęcia nr 1 (1h) Dwumian Newtona. Indukcja. Zajęcia nr 2 i 3 (4h) Trygonometria
 Dwumian Newtona. Indukcja. Zajęcia nr 2 i 3 (4h) Trygonometria") Technologia Chemiczna 008/09 Zajęcia wyrównawcze. Pokazać, że: ( )( ) n k k l = ( n l )( n l k l Zajęcia nr (h) Dwumian Newtona. Indukcja. ). Rozwiązać ( ) ( równanie: ) n n a) = 0 b) 3 ( ) n 3. Znaleźć
Technologia Chemiczna 008/09 Zajęcia wyrównawcze. Pokazać, że: ( )( ) n k k l = ( n l )( n l k l Zajęcia nr (h) Dwumian Newtona. Indukcja. ). Rozwiązać ( ) ( równanie: ) n n a) = 0 b) 3 ( ) n 3. Znaleźć
- Wydział Fizyki Zestaw nr 2. Krzywe stożkowe
 1 Algebra Liniowa z Geometria - Wydział Fizyki Zestaw nr 2 Krzywe stożkowe 1 Znaleźć współrze dne środka i promień okre gu x 2 8x + y 2 + 6y + 20 = 0 2 Znaleźć zbiór punktów płaszczyzny R 2, których odległość
1 Algebra Liniowa z Geometria - Wydział Fizyki Zestaw nr 2 Krzywe stożkowe 1 Znaleźć współrze dne środka i promień okre gu x 2 8x + y 2 + 6y + 20 = 0 2 Znaleźć zbiór punktów płaszczyzny R 2, których odległość
KLUCZ PUNKTOWANIA ODPOWIEDZI
 Egzamin maturalny maj 009 MATEMATYKA POZIOM PODSTAWOWY KLUCZ PUNKTOWANIA ODPOWIEDZI Zadanie. a) Matematyka poziom podstawowy Wyznaczanie wartości funkcji dla danych argumentów i jej miejsca zerowego.
Egzamin maturalny maj 009 MATEMATYKA POZIOM PODSTAWOWY KLUCZ PUNKTOWANIA ODPOWIEDZI Zadanie. a) Matematyka poziom podstawowy Wyznaczanie wartości funkcji dla danych argumentów i jej miejsca zerowego.
Kolektor. Zagadnienia. Wyciągnięcia po profilach, Lustro, Szyk. Wykonajmy model kolektora jak na rys. 1.
 Kolektor Zagadnienia. Wyciągnięcia po profilach, Lustro, Szyk Wykonajmy model kolektora jak na rys. 1. Rysunek 1 Składa się on z grubszej rury, o zmiennym przekroju, leżącej w płaszczyźnie symetrii kolektora
Kolektor Zagadnienia. Wyciągnięcia po profilach, Lustro, Szyk Wykonajmy model kolektora jak na rys. 1. Rysunek 1 Składa się on z grubszej rury, o zmiennym przekroju, leżącej w płaszczyźnie symetrii kolektora
KRYTERIA OCEN Z MATEMATYKI DLA KLASY I GIMNAZJUM
 KRYTERIA OCEN Z MATEMATYKI DLA KLASY I GIMNAZJUM DZIAŁ: LICZBY WYMIERNE (DODATNIE I UJEMNE) Otrzymuje uczeń, który nie spełnia kryteriów oceny dopuszczającej, nie jest w stanie na pojęcie liczby naturalnej,
KRYTERIA OCEN Z MATEMATYKI DLA KLASY I GIMNAZJUM DZIAŁ: LICZBY WYMIERNE (DODATNIE I UJEMNE) Otrzymuje uczeń, który nie spełnia kryteriów oceny dopuszczającej, nie jest w stanie na pojęcie liczby naturalnej,
3. Wstępny dobór parametrów przekładni stałej
 4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
Wymagania programowe z matematyki na poszczególne oceny w klasie III A i III B LP. Kryteria oceny
 Wymagania programowe z matematyki na poszczególne oceny w klasie III A i III B LP Przygotowane w oparciu o propozycję Wydawnictwa Nowa Era 2017/2018 Kryteria oceny Znajomość pojęć, definicji, własności
Wymagania programowe z matematyki na poszczególne oceny w klasie III A i III B LP Przygotowane w oparciu o propozycję Wydawnictwa Nowa Era 2017/2018 Kryteria oceny Znajomość pojęć, definicji, własności
Krzywe stożkowe. Algebra. Aleksander Denisiuk
 Algebra Krzywe stożkowe Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045 Gdańsk Algebra p. 1 Krzywe stożkowe
Algebra Krzywe stożkowe Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045 Gdańsk Algebra p. 1 Krzywe stożkowe
TYCZENIE OSI TRASY W 2 R 2 SŁ KŁ W 1 W 3
 TYCZENIE TRAS W procesie projektowania i realizacji inwestycji liniowych (autostrad, linii kolejowych, kanałów itp.) materiałem źródłowym jest mapa sytuacyjno-wysokościowa w skalach 1:5 000; 1:10 000 lub
TYCZENIE TRAS W procesie projektowania i realizacji inwestycji liniowych (autostrad, linii kolejowych, kanałów itp.) materiałem źródłowym jest mapa sytuacyjno-wysokościowa w skalach 1:5 000; 1:10 000 lub
Przekładnie zębate. Klasyfikacja przekładni zębatych. 1. Ze względu na miejsce zazębienia. 2. Ze względu na ruchomość osi
 Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej