Modele i metody automatyki. Układy automatycznej regulacji UAR
|
|
|
- Magdalena Brzozowska
- 9 lat temu
- Przeglądów:
Transkrypt
1 Modele i metody automatyki Układy automatycznej regulacji UAR

2 Możliwości i problemy jakie stwarzają zamknięte układy automatycznej regulacji powodują, że stały się one głównym obiektem zainteresowań automatyków. Opracowano pewne klasyczne algorytmy regulacji, które znalazły szerokie zastosowanie. Do doboru regulatora i jego dostrojenia potrzebna jest znajomość cech statycznych i dynamicznych obiektu, oraz kryterium pozwalające oceniać i porównywać uzyskane wyniki. Istotny jest również charakter działających na układ zakłóceń. Błąd regulacji powstaje w wyniku działania zakłóceń wpływających na obiekt, lub zmian wielkości wzorcowej. Reakcja układu zależy od miejsca ingerencji zaburzenia i dla optymalnego zwalczania błędu w poszczególnych przypadkach regulator powinien być inaczej dostrojony.

3 Uwzględniając ten fakt rozróżniamy trzy typy układów: 1. Układ stabilizacyjny, w którym wielkość x(t) = x0 jest stała. Głównym zadaniem układu jest zwalczanie wpływu zakłóceń działających na obiekt. 2. Układ nadążny (śledzący) x(t) - jest zmienna. Głównym zadaniem układu jest wymuszanie nadążania wielkości wyjściowej za nieznanymi wcześniej zmianami wzorca. 3 Układ programowy, w którym błędy regulacji mogą wynikać ze zmienności x(t) i z(t), ale zmienność x(t) jest znaną funkcją czasu i fakt ten można wykorzystać do poprawy jakości regulacji. (Można wprowadzić do regulatora zmodyfikowany sygnał wzorcowy, uwzględniający wynikające z dynamiki układu opóźnienie w formowaniu pożądanej wielkości wyjściowej.).
 i z(t), ale zmienność x(t) jest znaną funkcją czasu i fakt ten można wykorzystać do poprawy jakości")
4 Istnieją układy regulacji nie objęte powyższym podziałem. Realizują one inaczej postawione zadania, co wynika z niemożności przyjęcia przytoczonych założeń, nazywamy je układami specjalnymi (niekonwencjonalnymi, ekstremalnymi, adaptacyjnymi). Nawet przy spełnieniu omówionych założeń w przypadku wysokich wymagań jakościowych i obiektów zbyt trudnych do regulacji, ze względu na dynamikę, popularne algorytmy regulacji mogą nie dać zadawalających wyników. Stosowane są wówczas, na ogół realizowane cyfrowo, algorytmy specjalne. W układach ze sprzężeniem zwrotnym bardzo istotne jest opóźnienie występujące w dopływie do regulatora informacji o reakcji obiektu na zmiany sterowania. Opóźnienia te powodują, że regulator wypracowuje korektę sterowania na podstawie zdezaktualizowanej informacji. Prowadzi to do wolnego zaniku błędu regulacji, a w skrajnym przypadku do teoretycznie nieograniczonego wzrostu błędu, co określamy jako utratę stabilności przez układ regulacji.

5 Cechy statyczne elementów UAR. Linearyzacja. Względy praktyczne (możliwość korzystania z zasady superpozycji) powodują, że jeżeli jest to tylko możliwe posługujemy się modelami liniowymi. Założenie liniowości zawsze obowiązuje z pewnymi ograniczeniami. Opis cech statycznych (związków niezależnych od czasu) obiektów, czyli matematyczny model ujmujący związki pomiędzy interesującymi nas wielkościami w stanach ustalonych prowadzi się z większą dokładnością niż cech dynamicznych. Statyczne błędy regulacji nie przekraczają kilku procent, natomiast błędy dynamiczne sięgają 100% ale mają charakter przejściowy. Przy opisie cech dynamicznych możemy sobie pozwolić na większa tolerancję i staramy się zlinearyzować występujące zależności. Technologia wymaga aby na etapie doboru nominalnego punktu pracy obiektu uwzględniać nieliniowy charakter zależności statycznych y = f (u), które ewentualnie później będzie można zlinearyzować.

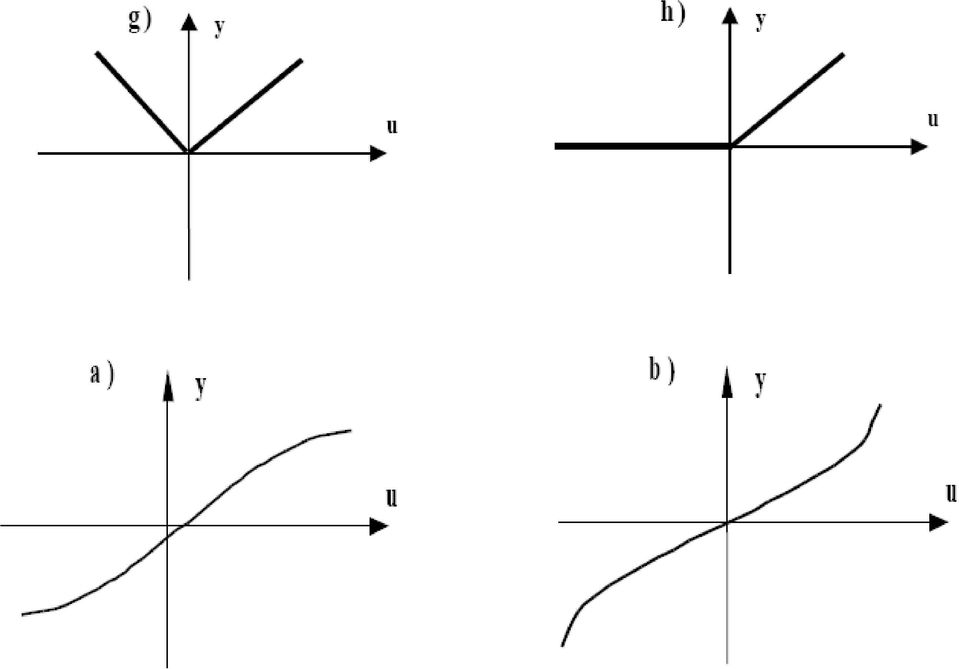
6 Rozróżniamy wiele typów nieliniowości charakterystyk statycznych i często nie będzie ich można zlinearyzować. Dotyczy to wystąpienia w interesującym nas zakresie charakterystyki nieciągłości funkcji, niejednoznaczności, nieciągłości pierwszej pochodnej. Znacznie lepiej nadają się do linearyzacji funkcje gładkie.

7

8
9 Stosowane są dwie metody linearyzacji. Jeżeli tak jak w układzie stabilizacyjnym, istnieje punkt pracy od którego stan nie powinien się znacznie oddalać to stosujemy metodę stycznej. Jeżeli natomiast przewidujemy pracę w pewnym przedziale zmienności zmiennej niezależnej to stosujemy metodę siecznej.

10 Metoda stycznej polega na przybliżeniu funkcji nieliniowej linią prostą styczną do niej w przyjętym punkcie nominalnym. Jeżeli zależność nieliniowa podana jest w formie analitycznej to stosujemy rozwinięcie funkcji w szereg Taylora wokół przyjętego punktu pracy i uwzględniamy tylko dwa pierwsze wyrazy.: Następnym krokiem w zadaniach automatyki jest przesunięcie początku Następnym krokiem w zadaniach automatyki jest przesunięcie początku układu współrzędnych do punktu styczności (y 0, u 0 ), przez podstawienie: y=y 0 +y*;u=u 0 +u*.pozbędziemysięwtensposóbwyrazuwolnego:

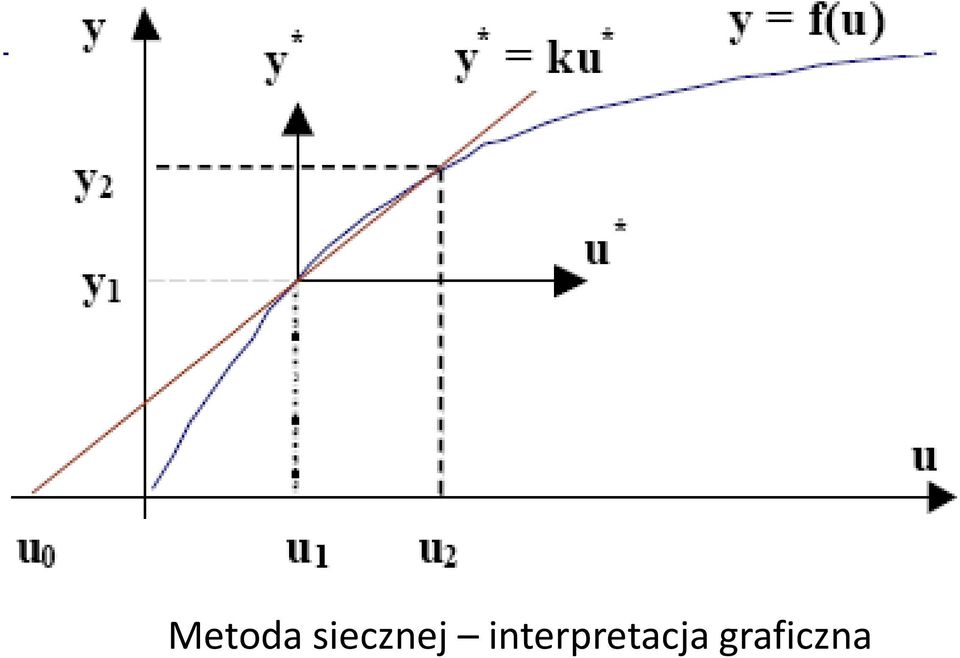
11 Metoda stycznej interpretacja graficzna

12 Metoda siecznej polega na zastąpieniu krzywej w zadanym przedziale prostą przecinającą krzywą w wybranych dwóch punktach (lepsze przybliżenie można uzyskać stosując metodę minimum całki z kwadratu odchyłki między krzywą, a przyjętą prostą). Przy funkcji podanej analitycznie mamy: Po przesunięciu układu współrzędnych do punktu ( y 1, u 1 ), przez podstawienie: y = y 1 + y*; u = u 1 + u* pozbędziemy się wyrazu wolnego:
,")
13 Metoda siecznej interpretacja graficzna
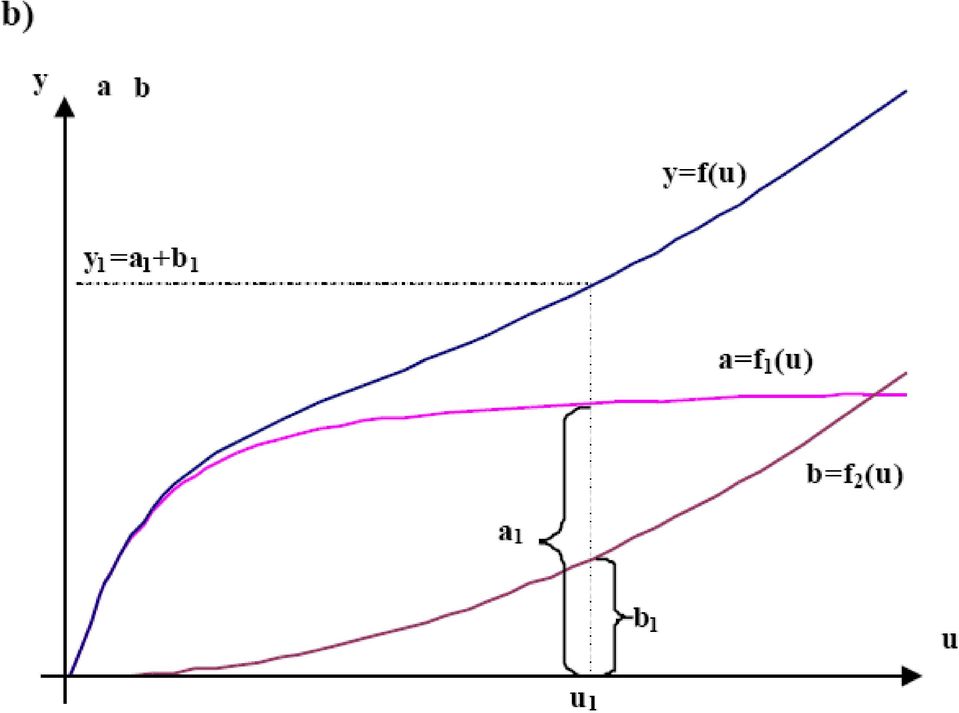
14 Linearyzacja elementów UAR. Jeżeli w UAR występują człony nieliniowe to chcąc je zlinearyzować musimy na wstępie określić punkty (przedziały) ich nominalnej pracy. Wymaga to określenia nieliniowych zależności pomiędzy zmiennymi układu. W układzie mogą wystąpić trzy podstawowe sytuacje połączenia bloków nieliniowych: szeregowe, równoległe i ze sprzężeniem zwrotnym. Nieliniowe zależności statyczne między sygnałami najczęściej podane są w formie graficznej i wypadkowe charakterystyki zastępcze wyznacza się graficznie. Połączenie szeregowe. W połączeniu przykładowym dysponujemy charakterystykami a = f 1 (u) i y = f 2 (a). Charakterystyki te możemy umieścić na wspólnym wykresie i kolejno dla poszczególnych wartości u wyznaczać punkty charakterystyki wypadkowej jak na rysunku przykładowym zgodnie z relacją:

15

16 Połączenie równoległe. Wspólny sygnał po przejściu przez dwa bloki jest w zależności od znaków stojących przy sumatorze dodawany lub odejmowany. Operację tę ilustruje rysunek poniżej, zgodnie z relacją:

17
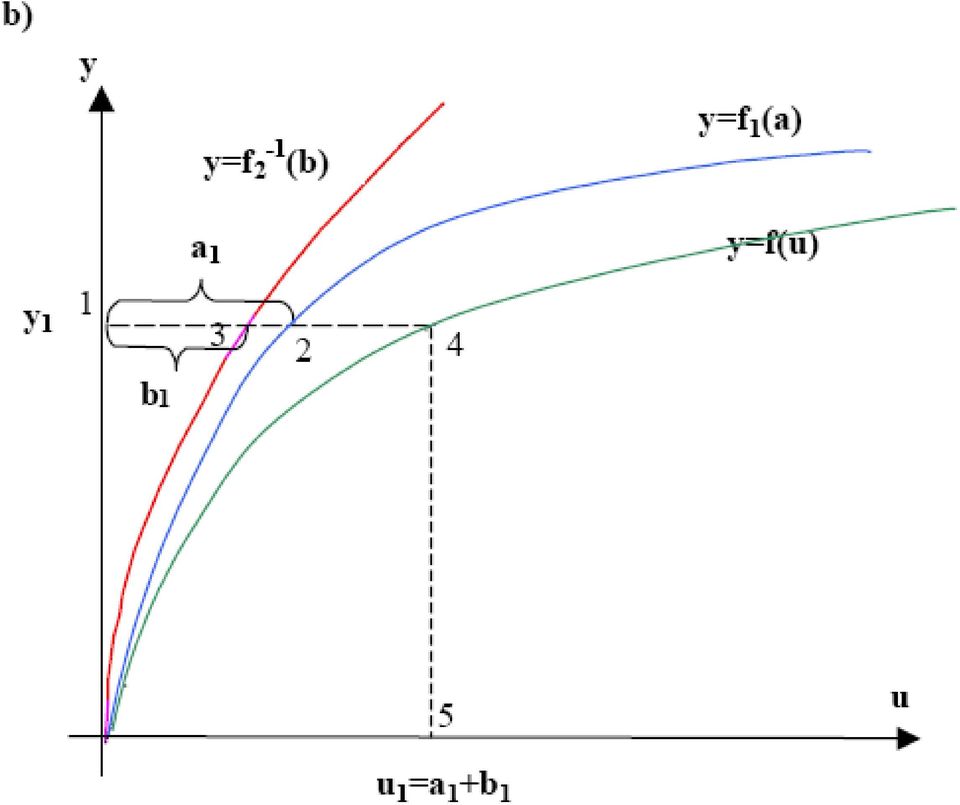
18 Połączenie bloków ze sprzężeniem zwrotnym. Szukamy funkcji y = f(u). Wielość sygnałów po stronie u powoduje, że łatwiej jest wyznaczyć funkcje odwrotną u = f -1 (y). W ten sposób możemy przyjmując kolejne wartości y wyznaczyć odpowiadające im wartości po czym uzyskaną zależność trzeba znów odwrócić. Zamiast dwukrotnego odwracania funkcji wystarczy na czas operacji zmienić role osi odciętych i rzędnych i przyjmując kolejne wartości y odczytać każdorazowo wartość a z funkcji y = f 1 (a) i b z krzywej y = f -1 2 (b). Czyli tylko funkcję f 2 trzeba odwrócić. Zauważmy, że ze względu na typ i jednostki sygnału b i y, w podanym układzie współrzędnych możemy narysować tą zależność tylko jako odwróconą. Aby układ mógł działać poprawnie uzyskane zależności muszą być jednoznaczne. Mając w układzie zadaną konkretną wartość wejściową, korzystając z przytoczonych przekształceń, wyznaczamy odpowiadającą jej wartość wielkości wyjściowej i punkty pracy wszystkich bloków. Następnie charakterystyki poszczególnych bloków linearyzujemy metodą stycznych wokół punktów pracy. W przypadku przewidywanej zmienności wielkości wejściowej w pewnym przedziale, stosujemy metodę siecznych.
. Czyli tylko funkcję f 2 trzeba odwrócić.")
19

20
21 Modele dynamiki. Potrzeba szybkiej minimalizacji pojawiających się na skutek działania zakłóceń błędów regulacji wymaga odpowiedniego dobrania i dostrojenia pod kątem dynamicznym elementów automatyki. W tym celu musimy przede wszystkim określić dynamikę obiektu. Istnieją dwa czynniki opóźniające stabilizację sygnału wyjściowego na nowym poziomie równowagi, po zmianie wartości wielkości wejściowej: opóźnienie transportowe(czas martwy) i bezwładność obiektów. Opóźnienie transportowe spowodowane jest skończoną prędkością nośników informacji. Przy szybkim nośniku informacji i krótkich trasach jej transportu opóźnienie transportowe może być niezauważalnie małe, ale nawet tak szybki nośnik informacji jakim jest światło w skali kosmicznej daje równie kosmiczne opóźnienia. W zadaniach technologicznych opóźnienia o charakterze transportowym mogą być na tyle duże, że uniemożliwią sprawne działanie UAR.
22 Duże opóźnienia mają miejsce gdy dotyczą transportu masy (np. ciecz o zmienianym składzie chemicznym transportowana jest na znaczną odległość). Opóźnienia utrudniające, lub uniemożliwiające działanie UAR wynikają często z trudności w szybkim pozyskaniu informacji o zmianach wielkości regulowanej. Opóźnienie transportowe wywołuje przesunięcie sygnału w czasie, które zapisujemy: f (t - τ) i wynosi ; gdzie: l jest długością drogi jaką pokonuje sygnał z prędkością v. Bezwładność wynika z faktu, że nowy stan równowagi wymaga zmiany poziomu napełnienia znajdujących się w obiekcie magazynów energii. Prędkość przepływu energii pomiędzy magazynami jest ograniczana przez opory i zależy na ogół od różnicy stanu ich napełnienia, więc w trakcie wyrównywania poziomów prędkość ta ulega zwolnieniu.
23 Jeżeli w obiekcie występują tylko skupione magazyny energii i obowiązują wcześniej przyjęte założenia liniowości i stacjonarności obiektu to zależność wielkości wyjściowej od sterowania możemy opisać jednym równaniem różniczkowym n-tego rzędu. Gdzie n jest równe ilości uwzględnianych w obiekcie magazynów energii.: Znak = rozdziela skutki od przyczyny. Z tego faktu wynika, że w realnym Znak = rozdziela skutki od przyczyny. Z tego faktu wynika, że w realnym układzie n>m. Opis układu w którym n = m choć często przyjmowany, jest już tylko modelowym przybliżeniem rzeczywistości bo zakłada równoczesność reakcji z pobudzeniem. Postać lewej strony równania wynika z budowy obiektu, a prawej zależy od miejsca i sposobu sterowania obiektem i przyjęcia zgodnie z naszymi zainteresowaniami określonego sygnału wyjściowego.
24 W układach automatyki występuje z reguły większa ilość członów dynamicznych w połączeniach: szeregowych, równoległych i w pętlach sprzężenia zwrotnego. Poszczególne sygnały podlegają w nich obróbce, z tego względu bardzo istotną jest możliwość algebraizacji równań różniczkowych jakie daje przekształcenie Laplace a. Równanie, przy założeniu zerowych warunków początkowych, (co w większości zadań rozwiązywanych w badaniu UAR nie jest istotnym ograniczeniem), po zastosowaniu przekształcenia Laplace`a przyjmie postać:
25 Wprowadzimy się pojęcie transmitancji, która w dziedzinie zmiennej s opisuje obróbkę sygnału w danym obiekcie. czyli Transmitancja obiektu reprezentującego tylko opóźnienie transportowe f (t - τ)ma postać:
26 W układach liniowych można dokonywać zmian konfiguracji układu blokowego, przestrzegając jedynie aby sygnał na swojej drodze pomiędzy wejściem, a interesującym nas wyjściem był tak samo obrobiony. Z tego punktu widzenia nieistotna jest kolejność usytuowania poszczególnych bloków oraz to czy przez dany blok przechodzą równocześnie inne sygnały. W UAR mogą wystąpić trzy elementarne połączenia członów: szeregowe, równoległe i z pętlą sprzężenia zwrotnego. Odpowiednie transmitancje zastępcze można łatwo wyznaczyć.
27 Szeregowe połączenie członów: Zgodnie z oznaczeniami jak na rysunku powyżej wyliczmy transmitancję wypadkową: Zastępcza transmitancja szeregowo połączonych członów, równa jest iloczynowi transmitancji.
28 Równoległe połączenie członów: Zastępcza transmitancja równolegle połączonych członów, równa jest sumie transmitancji.
29 Połączenie członów w układzie ze sprzężeniem zwrotnym: Zgodnie z oznaczeniami jak na rysunku, z sumatora wynika związek:
30 Ostatecznie otrzymujemy wzór na transmitancję zastępczą: Każde przekształcenie schematu blokowego liniowego UAR da się sprowadzić do powyższych trzech przypadków elementarnych.
31 Korzystając z powyższych przekształceń UAR możemy przedstawić w zwięzłej formie, jak na rysunku poniżej, wyróżniając tylko dwa bloki. Obiekt reprezentuje część technologiczną układu, a regulator elementy automatyki. Zwraca się tu uwagę na dwa sygnały wejściowe w i z ingerującewpracęukładuidwawyjściayiε. Sygnał y ma istotne znaczenie technologiczne, a sygnał błędu ε wykorzystywany jest do oceny jakościowej pracy układu.
32
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Przekształcanie schematów blokowych. Podczas ćwiczenia poruszane będą następujące zagadnienia:
 Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Rys. 1 Otwarty układ regulacji
 Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
przy warunkach początkowych: 0 = 0, 0 = 0
 MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych
 Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
M10. Własności funkcji liniowej
 M10. Własności funkcji liniowej dr Artur Gola e-mail: a.gola@ajd.czest.pl pokój 3010 Definicja Funkcję określoną wzorem y = ax + b, dla x R, gdzie a i b są stałymi nazywamy funkcją liniową. Wykresem funkcji
M10. Własności funkcji liniowej dr Artur Gola e-mail: a.gola@ajd.czest.pl pokój 3010 Definicja Funkcję określoną wzorem y = ax + b, dla x R, gdzie a i b są stałymi nazywamy funkcją liniową. Wykresem funkcji
Laboratorium z automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z automatyki Algebra schematów blokowych, wyznaczanie odpowiedzi obiektu na sygnał zadany, charakterystyki częstotliwościowe Kierunek studiów:
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z automatyki Algebra schematów blokowych, wyznaczanie odpowiedzi obiektu na sygnał zadany, charakterystyki częstotliwościowe Kierunek studiów:
Klasa 1 technikum. Poniżej przedstawiony został podział wymagań na poszczególne oceny szkolne:
 Klasa 1 technikum Przedmiotowy system oceniania wraz z wymaganiami edukacyjnymi Wyróżnione zostały następujące wymagania programowe: konieczne (K), podstawowe (P), rozszerzające (R), dopełniające (D) i
Klasa 1 technikum Przedmiotowy system oceniania wraz z wymaganiami edukacyjnymi Wyróżnione zostały następujące wymagania programowe: konieczne (K), podstawowe (P), rozszerzające (R), dopełniające (D) i
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Systemy. Krzysztof Patan
 Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Modele i metody automatyki
 Modele i metody automatyki Dr inż. Wiesław Madej Wstęp Modele i metody automatyki 30 h wykład 15 h ćwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura T. Kaczorek Teoria sterowania
Modele i metody automatyki Dr inż. Wiesław Madej Wstęp Modele i metody automatyki 30 h wykład 15 h ćwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura T. Kaczorek Teoria sterowania
ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II
 ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II POZIOM ROZSZERZONY Równania i nierówności z wartością bezwzględną. rozwiązuje równania i nierówności
ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II POZIOM ROZSZERZONY Równania i nierówności z wartością bezwzględną. rozwiązuje równania i nierówności
FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH
 FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH PROPORCJONALNOŚĆ PROSTA Proporcjonalnością prostą nazywamy zależność między dwoma wielkościami zmiennymi x i y, określoną wzorem: y = a x Gdzie a jest
FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH PROPORCJONALNOŚĆ PROSTA Proporcjonalnością prostą nazywamy zależność między dwoma wielkościami zmiennymi x i y, określoną wzorem: y = a x Gdzie a jest
FUNKCJA LINIOWA - WYKRES
 FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (Postać kierunkowa) Funkcja liniowa jest podstawowym typem funkcji. Jest to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości
FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (Postać kierunkowa) Funkcja liniowa jest podstawowym typem funkcji. Jest to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości
Całkowanie numeryczne
 Całkowanie numeryczne Poniżej omówione zostanie kilka metod przybliżania operacji całkowania i różniczkowania w szczególności uzależnieniu pochodnej od jej różnic skończonych gdy równanie różniczkowe mamy
Całkowanie numeryczne Poniżej omówione zostanie kilka metod przybliżania operacji całkowania i różniczkowania w szczególności uzależnieniu pochodnej od jej różnic skończonych gdy równanie różniczkowe mamy
Rozwiązywanie równań nieliniowych
 Rozwiązywanie równań nieliniowych Marcin Orchel 1 Wstęp Przykłady wyznaczania miejsc zerowych funkcji f : f(ξ) = 0. Wyszukiwanie miejsc zerowych wielomianu n-tego stopnia. Wymiar tej przestrzeni wektorowej
Rozwiązywanie równań nieliniowych Marcin Orchel 1 Wstęp Przykłady wyznaczania miejsc zerowych funkcji f : f(ξ) = 0. Wyszukiwanie miejsc zerowych wielomianu n-tego stopnia. Wymiar tej przestrzeni wektorowej
II. STEROWANIE I REGULACJA AUTOMATYCZNA
 II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
2) R stosuje w obliczeniach wzór na logarytm potęgi oraz wzór na zamianę podstawy logarytmu.
 R stosuje w obliczeniach wzór na logarytm potęgi oraz wzór na zamianę podstawy logarytmu.") ZAKRES ROZSZERZONY 1. Liczby rzeczywiste. Uczeń: 1) przedstawia liczby rzeczywiste w różnych postaciach (np. ułamka zwykłego, ułamka dziesiętnego okresowego, z użyciem symboli pierwiastków, potęg); 2)
ZAKRES ROZSZERZONY 1. Liczby rzeczywiste. Uczeń: 1) przedstawia liczby rzeczywiste w różnych postaciach (np. ułamka zwykłego, ułamka dziesiętnego okresowego, z użyciem symboli pierwiastków, potęg); 2)
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
FUNKCJA LINIOWA - WYKRES. y = ax + b. a i b to współczynniki funkcji, które mają wartości liczbowe
 FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (postać kierunkowa) Funkcja liniowa to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości liczbowe Szczególnie ważny w postaci
FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (postać kierunkowa) Funkcja liniowa to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości liczbowe Szczególnie ważny w postaci
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Podstawy Automatyki. Wykład 2 - matematyczne modelowanie układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - matematyczne modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - matematyczne modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
Technikum Nr 2 im. gen. Mieczysława Smorawińskiego w Zespole Szkół Ekonomicznych w Kaliszu
 Technikum Nr 2 im. gen. Mieczysława Smorawińskiego w Zespole Szkół Ekonomicznych w Kaliszu Wymagania edukacyjne niezbędne do uzyskania poszczególnych śródrocznych i rocznych ocen klasyfikacyjnych z obowiązkowych
Technikum Nr 2 im. gen. Mieczysława Smorawińskiego w Zespole Szkół Ekonomicznych w Kaliszu Wymagania edukacyjne niezbędne do uzyskania poszczególnych śródrocznych i rocznych ocen klasyfikacyjnych z obowiązkowych
PRZEDMIOTOWY SYSTEM OCENIANIA PROSTO DO MATURY KLASA 1 ZAKRES PODSTAWOWY
 PRZEDMIOTOWY SYSTEM OCENIANIA PROSTO DO MATURY KLASA 1 ZAKRES PODSTAWOWY Warszawa 2019 LICZBY RZECZYWISTE stosować prawidłowo pojęcie zbioru, podzbioru, zbioru pustego; zapisywać zbiory w różnej postaci
PRZEDMIOTOWY SYSTEM OCENIANIA PROSTO DO MATURY KLASA 1 ZAKRES PODSTAWOWY Warszawa 2019 LICZBY RZECZYWISTE stosować prawidłowo pojęcie zbioru, podzbioru, zbioru pustego; zapisywać zbiory w różnej postaci
ROZKŁAD MATERIAŁU DO II KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ.
 A WYMAGANIA PODSTAWY PROGRAMOWEJ.") ROZKŁAD MATERIAŁU DO II KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ. LICZBA TEMAT GODZIN LEKCYJNYCH Potęgi, pierwiastki i logarytmy (8 h) Potęgi 3 Pierwiastki 3 Potęgi o wykładnikach
ROZKŁAD MATERIAŁU DO II KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ. LICZBA TEMAT GODZIN LEKCYJNYCH Potęgi, pierwiastki i logarytmy (8 h) Potęgi 3 Pierwiastki 3 Potęgi o wykładnikach
Zaawansowane metody numeryczne Komputerowa analiza zagadnień różniczkowych 4. Równania różniczkowe zwyczajne podstawy teoretyczne
 Zaawansowane metody numeryczne Komputerowa analiza zagadnień różniczkowych 4. Równania różniczkowe zwyczajne podstawy teoretyczne P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ semestr letni 2005/06 Wstęp
Zaawansowane metody numeryczne Komputerowa analiza zagadnień różniczkowych 4. Równania różniczkowe zwyczajne podstawy teoretyczne P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ semestr letni 2005/06 Wstęp
III. DOŚWIADCZALNE OKREŚLANIE WŁAŚCIWOŚCI UKŁADÓW POMIAROWYCH I REGULACYJNYCH
 III. DOŚWIADCZALNE OKREŚLANIE WŁAŚCIWOŚCI UKŁADÓW POMIAROWYCH I REGULACYJNYCH Tak zwana identyfikacja charakteru i właściwości obiektu regulacji, a zwykle i całego układu pomiarowo-regulacyjnego, jest
III. DOŚWIADCZALNE OKREŚLANIE WŁAŚCIWOŚCI UKŁADÓW POMIAROWYCH I REGULACYJNYCH Tak zwana identyfikacja charakteru i właściwości obiektu regulacji, a zwykle i całego układu pomiarowo-regulacyjnego, jest
13. Równania różniczkowe - portrety fazowe
 13. Równania różniczkowe - portrety fazowe Grzegorz Kosiorowski Uniwersytet Ekonomiczny w Krakowie rzegorz Kosiorowski (Uniwersytet Ekonomiczny 13. wrównania Krakowie) różniczkowe - portrety fazowe 1 /
13. Równania różniczkowe - portrety fazowe Grzegorz Kosiorowski Uniwersytet Ekonomiczny w Krakowie rzegorz Kosiorowski (Uniwersytet Ekonomiczny 13. wrównania Krakowie) różniczkowe - portrety fazowe 1 /
PLAN WYNIKOWY DLA KLASY DRUGIEJ POZIOM PODSTAWOWY I ROZSZERZONY. I. Proste na płaszczyźnie (15 godz.)
") PLAN WYNIKOWY DLA KLASY DRUGIEJ POZIOM PODSTAWOWY I ROZSZERZONY I. Proste na płaszczyźnie (15 godz.) Równanie prostej w postaci ogólnej Wzajemne połoŝenie dwóch prostych Nierówność liniowa z dwiema niewiadomymi
PLAN WYNIKOWY DLA KLASY DRUGIEJ POZIOM PODSTAWOWY I ROZSZERZONY I. Proste na płaszczyźnie (15 godz.) Równanie prostej w postaci ogólnej Wzajemne połoŝenie dwóch prostych Nierówność liniowa z dwiema niewiadomymi
Podstawy Automatyki. Wykład 2 - modelowanie matematyczne układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
Rachunek wektorowy - wprowadzenie. dr inż. Romuald Kędzierski
 Rachunek wektorowy - wprowadzenie dr inż. Romuald Kędzierski Graficzne przedstawianie wielkości wektorowych Długość wektora jest miarą jego wartości Linia prosta wyznaczająca kierunek działania wektora
Rachunek wektorowy - wprowadzenie dr inż. Romuald Kędzierski Graficzne przedstawianie wielkości wektorowych Długość wektora jest miarą jego wartości Linia prosta wyznaczająca kierunek działania wektora
Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji
 Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji Opracowanie: mgr inż. Krystian Łygas, inż. Wojciech Danilczuk Na podstawie materiałów Prof. dr hab.
Katedra Automatyzacji Laboratorium Podstaw Automatyzacji Produkcji Laboratorium Podstaw Automatyzacji Opracowanie: mgr inż. Krystian Łygas, inż. Wojciech Danilczuk Na podstawie materiałów Prof. dr hab.
WYMAGANIA EDUKACYJNE Z MATEMATYKI KLASA III ZAKRES ROZSZERZONY (90 godz.) , x
 , x") WYMAGANIA EDUACYJNE Z MATEMATYI LASA III ZARES ROZSZERZONY (90 godz.) Oznaczenia: wymagania konieczne (dopuszczający); P wymagania podstawowe (dostateczny); R wymagania rozszerzające (dobry); D wymagania
WYMAGANIA EDUACYJNE Z MATEMATYI LASA III ZARES ROZSZERZONY (90 godz.) Oznaczenia: wymagania konieczne (dopuszczający); P wymagania podstawowe (dostateczny); R wymagania rozszerzające (dobry); D wymagania
4. Właściwości eksploatacyjne układów regulacji Wprowadzenie. Hs () Ys () Ws () Es () Go () s. Vs ()
 Ys () Ws () Es () Go () s. Vs ()") 4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
Podstawy Automatyki. Wykład 2 - modelowanie matematyczne układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Wykład 2 - modelowanie matematyczne układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp Obiekty (procesy) rzeczywiste, a co za tym idzie układy regulacji, mają właściwości nieliniowe,
Ćwiczenia nr 7. TEMATYKA: Krzywe Bézier a
 TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
RÓWNANIA RÓŻNICZKOWE WYKŁAD 2
 RÓWNANIA RÓŻNICZKOWE WYKŁAD 2 Równania różniczkowe o zmiennych rozdzielonych Równania sprowadzalne do równań o zmiennych rozdzielonych Niech f będzie funkcją ciągłą na przedziale (a, b), spełniającą na
RÓWNANIA RÓŻNICZKOWE WYKŁAD 2 Równania różniczkowe o zmiennych rozdzielonych Równania sprowadzalne do równań o zmiennych rozdzielonych Niech f będzie funkcją ciągłą na przedziale (a, b), spełniającą na
Transmitancje układów ciągłych
 Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
MATeMAtyka 1. Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych. Zakres podstawowy i rozszerzony Klasa pierwsza
 MATeMAtyka 1 Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych Zakres podstawowy i rozszerzony Klasa pierwsza Wyróżnione zostały następujące wymagania programowe: konieczne (K), podstawowe
MATeMAtyka 1 Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych Zakres podstawowy i rozszerzony Klasa pierwsza Wyróżnione zostały następujące wymagania programowe: konieczne (K), podstawowe
RÓWNANIA RÓŻNICZKOWE WYKŁAD 4
 RÓWNANIA RÓŻNICZKOWE WYKŁAD 4 Obszar określoności równania Jeżeli występująca w równaniu y' f ( x, y) funkcja f jest ciągła, to równanie posiada rozwiązanie. Jeżeli f jest nieokreślona w punkcie (x 0,
RÓWNANIA RÓŻNICZKOWE WYKŁAD 4 Obszar określoności równania Jeżeli występująca w równaniu y' f ( x, y) funkcja f jest ciągła, to równanie posiada rozwiązanie. Jeżeli f jest nieokreślona w punkcie (x 0,
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Regulacja dwupołożeniowa.
 Politechnika Krakowska Wydział Inżynierii Elektrycznej i Komputerowej Zakład eorii Sterowania Regulacja dwupołożeniowa. Kraków Zakład eorii Sterowania (E ) Regulacja dwupołożeniowa opis ćwiczenia.. Opis
Politechnika Krakowska Wydział Inżynierii Elektrycznej i Komputerowej Zakład eorii Sterowania Regulacja dwupołożeniowa. Kraków Zakład eorii Sterowania (E ) Regulacja dwupołożeniowa opis ćwiczenia.. Opis
Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych
 Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
Ćwiczenie nr 1 Odpowiedzi czasowe układów dynamicznych 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
Wymagania edukacyjne z matematyki
 Wymagania edukacyjne z matematyki Liceum Ogólnokształcące Klasa I Poniżej przedstawiony został podział wymagań edukacyjnych na poszczególne oceny. Wiedza i umiejętności konieczne do opanowania (K) to zagadnienia,
Wymagania edukacyjne z matematyki Liceum Ogólnokształcące Klasa I Poniżej przedstawiony został podział wymagań edukacyjnych na poszczególne oceny. Wiedza i umiejętności konieczne do opanowania (K) to zagadnienia,
MATEMATYKA WYKAZ UMIEJĘTNOŚCI WYMAGANYCH NA POSZCZEGÓLNE OCENY DLA KLASY PIERWSZEJ
 MATEMATYKA WYKAZ UMIEJĘTNOŚCI WYMAGANYCH NA POSZCZEGÓLNE OCENY 1. LICZBY RZECZYWISTE DLA KLASY PIERWSZEJ 1. Podawanie przykładów liczb: naturalnych, całkowitych, wymiernych, niewymiernych, pierwszych i
MATEMATYKA WYKAZ UMIEJĘTNOŚCI WYMAGANYCH NA POSZCZEGÓLNE OCENY 1. LICZBY RZECZYWISTE DLA KLASY PIERWSZEJ 1. Podawanie przykładów liczb: naturalnych, całkowitych, wymiernych, niewymiernych, pierwszych i
Definicje i przykłady
 Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
WYMAGANIA EDUKACYJNE Z MATEMATYKI 2016/2017 (zakres podstawowy) klasa 3abc
 klasa 3abc") WYMAGANIA EDUKACYJNE Z MATEMATYKI 2016/2017 (zakres podstawowy) klasa 3abc 1, Ciągi zna definicję ciągu (ciągu liczbowego); potrafi wyznaczyć dowolny wyraz ciągu liczbowego określonego wzorem ogólnym;
WYMAGANIA EDUKACYJNE Z MATEMATYKI 2016/2017 (zakres podstawowy) klasa 3abc 1, Ciągi zna definicję ciągu (ciągu liczbowego); potrafi wyznaczyć dowolny wyraz ciągu liczbowego określonego wzorem ogólnym;
Elementy rachunku różniczkowego i całkowego
 Elementy rachunku różniczkowego i całkowego W paragrafie tym podane zostaną elementarne wiadomości na temat rachunku różniczkowego i całkowego oraz przykłady jego zastosowania w fizyce. Małymi literami
Elementy rachunku różniczkowego i całkowego W paragrafie tym podane zostaną elementarne wiadomości na temat rachunku różniczkowego i całkowego oraz przykłady jego zastosowania w fizyce. Małymi literami
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Próbny egzamin z matematyki dla uczniów klas II LO i III Technikum. w roku szkolnym 2012/2013
 Próbny egzamin z matematyki dla uczniów klas II LO i III Technikum w roku szkolnym 2012/2013 I. Zakres materiału do próbnego egzaminu maturalnego z matematyki: 1) liczby rzeczywiste 2) wyrażenia algebraiczne
Próbny egzamin z matematyki dla uczniów klas II LO i III Technikum w roku szkolnym 2012/2013 I. Zakres materiału do próbnego egzaminu maturalnego z matematyki: 1) liczby rzeczywiste 2) wyrażenia algebraiczne
FUNKCJA KWADRATOWA. Zad 1 Przedstaw funkcję kwadratową w postaci ogólnej. Postać ogólna funkcji kwadratowej to: y = ax + bx + c;(
 Zad Przedstaw funkcję kwadratową w postaci ogólnej Przykład y = ( x ) + 5 (postać kanoniczna) FUNKCJA KWADRATOWA Postać ogólna funkcji kwadratowej to: y = ax + bx + c;( a 0) Aby ją uzyskać pozbywamy się
Zad Przedstaw funkcję kwadratową w postaci ogólnej Przykład y = ( x ) + 5 (postać kanoniczna) FUNKCJA KWADRATOWA Postać ogólna funkcji kwadratowej to: y = ax + bx + c;( a 0) Aby ją uzyskać pozbywamy się
KRYTERIA OCENIANIA Z MATEMATYKI W OPARCIU O PODSTAWĘ PROGRAMOWĄ I PROGRAM NAUCZANIA MATEMATYKA 2001 DLA KLASY DRUGIEJ
 KRYTERIA OCENIANIA Z MATEMATYKI W OPARCIU O PODSTAWĘ PROGRAMOWĄ I PROGRAM NAUCZANIA MATEMATYKA 2001 DLA KLASY DRUGIEJ TREŚCI KSZTAŁCENIA WYMAGANIA PODSTAWOWE WYMAGANIA PONADPODSTAWOWE Liczby wymierne i
KRYTERIA OCENIANIA Z MATEMATYKI W OPARCIU O PODSTAWĘ PROGRAMOWĄ I PROGRAM NAUCZANIA MATEMATYKA 2001 DLA KLASY DRUGIEJ TREŚCI KSZTAŁCENIA WYMAGANIA PODSTAWOWE WYMAGANIA PONADPODSTAWOWE Liczby wymierne i
Tematyka egzaminu z Podstaw sterowania
 Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
Tematyka egzaminu z Podstaw sterowania Rafał Trójniak 6 września 2009 Spis treści 1 Rozwiązane tematy 1 1.1 Napisać równanie różniczkowe dla zbiornika z odpływem grawitacyjnym...............................
3. FUNKCJA LINIOWA. gdzie ; ół,.
 1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
FUNKCJE. Kurs ZDAJ MATURĘ Z MATEMATYKI MODUŁ 5 Teoria funkcje cz.1. Definicja funkcji i wiadomości podstawowe
 1 FUNKCJE Definicja funkcji i wiadomości podstawowe Jeżeli mamy dwa zbiory: zbiór X i zbiór Y, i jeżeli każdemu elementowi ze zbioru X przyporządkujemy dokładnie jeden element ze zbioru Y, to takie przyporządkowanie
1 FUNKCJE Definicja funkcji i wiadomości podstawowe Jeżeli mamy dwa zbiory: zbiór X i zbiór Y, i jeżeli każdemu elementowi ze zbioru X przyporządkujemy dokładnie jeden element ze zbioru Y, to takie przyporządkowanie
WYMAGANIE EDUKACYJNE Z MATEMATYKI W KLASIE II GIMNAZJUM. dopuszczającą dostateczną dobrą bardzo dobrą celującą
 1. Statystyka odczytać informacje z tabeli odczytać informacje z diagramu 2. Mnożenie i dzielenie potęg o tych samych podstawach 3. Mnożenie i dzielenie potęg o tych samych wykładnikach 4. Potęga o wykładniku
1. Statystyka odczytać informacje z tabeli odczytać informacje z diagramu 2. Mnożenie i dzielenie potęg o tych samych podstawach 3. Mnożenie i dzielenie potęg o tych samych wykładnikach 4. Potęga o wykładniku
Wymagania edukacyjne matematyka klasa 1 zakres podstawowy 1. LICZBY RZECZYWISTE
 Wymagania edukacyjne matematyka klasa 1 zakres podstawowy 1. LICZBY RZECZYWISTE podaje przykłady liczb: naturalnych, całkowitych, wymiernych, niewymiernych, pierwszych i złożonych oraz przyporządkowuje
Wymagania edukacyjne matematyka klasa 1 zakres podstawowy 1. LICZBY RZECZYWISTE podaje przykłady liczb: naturalnych, całkowitych, wymiernych, niewymiernych, pierwszych i złożonych oraz przyporządkowuje
Metody numeryczne Technika obliczeniowa i symulacyjna Sem. 2, EiT, 2014/2015
 Metody numeryczne Technika obliczeniowa i symulacyjna Sem. 2, EiT, 2014/2015 1 Metody numeryczne Dział matematyki Metody rozwiązywania problemów matematycznych za pomocą operacji na liczbach. Otrzymywane
Metody numeryczne Technika obliczeniowa i symulacyjna Sem. 2, EiT, 2014/2015 1 Metody numeryczne Dział matematyki Metody rozwiązywania problemów matematycznych za pomocą operacji na liczbach. Otrzymywane
Sztuczna Inteligencja Tematy projektów Sieci Neuronowe
 PB, 2009 2010 Sztuczna Inteligencja Tematy projektów Sieci Neuronowe Projekt 1 Stwórz projekt implementujący jednokierunkową sztuczną neuronową złożoną z neuronów typu sigmoidalnego z algorytmem uczenia
PB, 2009 2010 Sztuczna Inteligencja Tematy projektów Sieci Neuronowe Projekt 1 Stwórz projekt implementujący jednokierunkową sztuczną neuronową złożoną z neuronów typu sigmoidalnego z algorytmem uczenia
WYMAGANIA na poszczególne oceny-klasa I Gimnazjum
 WYMAGANIA na poszczególne oceny-klasa I Gimnazjum Oceny z plusem lub minusem otrzymują uczniowie, których wiadomości i umiejętności znajdują się na pograniczu wymagań danej oceny głównej. (Znaki + i -
WYMAGANIA na poszczególne oceny-klasa I Gimnazjum Oceny z plusem lub minusem otrzymują uczniowie, których wiadomości i umiejętności znajdują się na pograniczu wymagań danej oceny głównej. (Znaki + i -
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 7 BADANIE ODPOWIEDZI USTALONEJ NA OKRESOWY CIĄG IMPULSÓW 1. Cel ćwiczenia Obserwacja przebiegów wyjściowych
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 7 BADANIE ODPOWIEDZI USTALONEJ NA OKRESOWY CIĄG IMPULSÓW 1. Cel ćwiczenia Obserwacja przebiegów wyjściowych
Funkcja liniowa - podsumowanie
 Funkcja liniowa - podsumowanie 1. Funkcja - wprowadzenie Założenie wyjściowe: Rozpatrywana będzie funkcja opisana w dwuwymiarowym układzie współrzędnych X. Oś X nazywana jest osią odciętych (oś zmiennych
Funkcja liniowa - podsumowanie 1. Funkcja - wprowadzenie Założenie wyjściowe: Rozpatrywana będzie funkcja opisana w dwuwymiarowym układzie współrzędnych X. Oś X nazywana jest osią odciętych (oś zmiennych
Plan wykładu. Własności statyczne i dynamiczne elementów automatyki:
 Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
Wykład z Technologii Informacyjnych. Piotr Mika
 Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
FUNKCJE ELEMENTARNE I ICH WŁASNOŚCI
 FUNKCJE ELEMENTARNE I ICH WŁASNOŚCI DEFINICJA (funkcji elementarnych) Podstawowymi funkcjami elementarnymi nazywamy funkcje: stałe potęgowe wykładnicze logarytmiczne trygonometryczne Funkcje, które można
FUNKCJE ELEMENTARNE I ICH WŁASNOŚCI DEFINICJA (funkcji elementarnych) Podstawowymi funkcjami elementarnymi nazywamy funkcje: stałe potęgowe wykładnicze logarytmiczne trygonometryczne Funkcje, które można
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Procesy wykładniczego wzrostu i spadku (np populacja bakterii, rozpad radioaktywny, wymiana ciepła) można modelować równaniem
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Mgr Kornelia Uczeń. WYMAGANIA na poszczególne oceny-klasa VII-Szkoła Podstawowa
 Mgr Kornelia Uczeń WYMAGANIA na poszczególne oceny-klasa VII-Szkoła Podstawowa Oceny z plusem lub minusem otrzymują uczniowie, których wiadomości i umiejętności znajdują się na pograniczu wymagań danej
Mgr Kornelia Uczeń WYMAGANIA na poszczególne oceny-klasa VII-Szkoła Podstawowa Oceny z plusem lub minusem otrzymują uczniowie, których wiadomości i umiejętności znajdują się na pograniczu wymagań danej
Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych klasa druga zakres rozszerzony
 Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych klasa druga zakres rozszerzony Wymagania konieczne (K) dotyczą zagadnień elementarnych, stanowiących swego rodzaju podstawę, zatem
Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych klasa druga zakres rozszerzony Wymagania konieczne (K) dotyczą zagadnień elementarnych, stanowiących swego rodzaju podstawę, zatem
Pochodna i różniczka funkcji oraz jej zastosowanie do obliczania niepewności pomiarowych
 Pochodna i różniczka unkcji oraz jej zastosowanie do obliczania niepewności pomiarowych Krzyszto Rębilas DEFINICJA POCHODNEJ Pochodna unkcji () w punkcie określona jest jako granica: lim 0 Oznaczamy ją
Pochodna i różniczka unkcji oraz jej zastosowanie do obliczania niepewności pomiarowych Krzyszto Rębilas DEFINICJA POCHODNEJ Pochodna unkcji () w punkcie określona jest jako granica: lim 0 Oznaczamy ją
Plan wynikowy z wymaganiami edukacyjnymi z matematyki w zakresie podstawowym dla klasy 1 zsz Katarzyna Szczygieł
 Plan wynikowy z wymaganiami edukacyjnymi z matematyki w zakresie podstawowym dla klasy 1 zsz Katarzyna Szczygieł Lp. Temat Kształcone umiejętności 1 Zasady pracy na lekcjach matematyki. Dział I. LICZBY
Plan wynikowy z wymaganiami edukacyjnymi z matematyki w zakresie podstawowym dla klasy 1 zsz Katarzyna Szczygieł Lp. Temat Kształcone umiejętności 1 Zasady pracy na lekcjach matematyki. Dział I. LICZBY
WYMAGANIA EDUKACYJNE Z MATEMATYKI W KLASIE II W PUBLICZNYM GIMNAZJUM NR 2 W ZESPOLE SZKÓŁ W RUDKACH
 WYMAGANIA EDUKACYJNE Z MATEMATYKI W KLASIE II W PUBLICZNYM GIMNAZJUM NR 2 W ZESPOLE SZKÓŁ W RUDKACH Marzena Zbrożyna DOPUSZCZAJĄCY: Uczeń potrafi: odczytać informacje z tabeli odczytać informacje z diagramu
WYMAGANIA EDUKACYJNE Z MATEMATYKI W KLASIE II W PUBLICZNYM GIMNAZJUM NR 2 W ZESPOLE SZKÓŁ W RUDKACH Marzena Zbrożyna DOPUSZCZAJĄCY: Uczeń potrafi: odczytać informacje z tabeli odczytać informacje z diagramu
ĆWICZENIE 6 OBWODY NIELINIOWE PRĄDU STAŁEGO Podstawy teoretyczne ćwiczenia
 ĆWCZENE 6 OBWODY NELNOWE RĄD STAŁEGO Cel ćwiczenia: poznanie podstawowych zjawisk zachodzących w nieliniowych obwodach elektrycznych oraz pomiar parametrów charakteryzujących te zjawiska. 6.1. odstawy
ĆWCZENE 6 OBWODY NELNOWE RĄD STAŁEGO Cel ćwiczenia: poznanie podstawowych zjawisk zachodzących w nieliniowych obwodach elektrycznych oraz pomiar parametrów charakteryzujących te zjawiska. 6.1. odstawy
Pochodna i różniczka funkcji oraz jej zastosowanie do rachunku błędów pomiarowych
 Pochodna i różniczka unkcji oraz jej zastosowanie do rachunku błędów pomiarowych Krzyszto Rębilas DEFINICJA POCHODNEJ Pochodna unkcji () w punkcie określona jest jako granica: lim 0 Oznaczamy ją symbolami:
Pochodna i różniczka unkcji oraz jej zastosowanie do rachunku błędów pomiarowych Krzyszto Rębilas DEFINICJA POCHODNEJ Pochodna unkcji () w punkcie określona jest jako granica: lim 0 Oznaczamy ją symbolami:
Przedmiotowy system oceniania
 Przedmiotowy system oceniania gimnazjum - matematyka Opracowała mgr Katarzyna Kukuła 1 MATEMATYKA KRYTERIA OCEN Kryteria oceniania zostały określone przez podanie listy umiejętności, którymi uczeń musi
Przedmiotowy system oceniania gimnazjum - matematyka Opracowała mgr Katarzyna Kukuła 1 MATEMATYKA KRYTERIA OCEN Kryteria oceniania zostały określone przez podanie listy umiejętności, którymi uczeń musi
Poniżej przedstawiony został podział wymagań na poszczególne oceny szkolne:
 Prosto do matury klasa d Rok szkolny 014/015 WYMAGANIA EDUKACYJNE Wyróżnione zostały następujące wymagania programowe: konieczne (K), podstawowe (P), rozszerzające (R), dopełniające (D) i wykraczające
Prosto do matury klasa d Rok szkolny 014/015 WYMAGANIA EDUKACYJNE Wyróżnione zostały następujące wymagania programowe: konieczne (K), podstawowe (P), rozszerzające (R), dopełniające (D) i wykraczające
Funkcje wymierne. Jerzy Rutkowski. Działania dodawania i mnożenia funkcji wymiernych określa się wzorami: g h + k l g h k.
 Funkcje wymierne Jerzy Rutkowski Teoria Przypomnijmy, że przez R[x] oznaczamy zbiór wszystkich wielomianów zmiennej x i o współczynnikach rzeczywistych Definicja Funkcją wymierną jednej zmiennej nazywamy
Funkcje wymierne Jerzy Rutkowski Teoria Przypomnijmy, że przez R[x] oznaczamy zbiór wszystkich wielomianów zmiennej x i o współczynnikach rzeczywistych Definicja Funkcją wymierną jednej zmiennej nazywamy
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
KADD Metoda najmniejszych kwadratów funkcje nieliniowe
 Metoda najmn. kwadr. - funkcje nieliniowe Metoda najmniejszych kwadratów Funkcje nieliniowe Procedura z redukcją kroku iteracji Przykłady zastosowań Dopasowanie funkcji wykładniczej Dopasowanie funkcji
Metoda najmn. kwadr. - funkcje nieliniowe Metoda najmniejszych kwadratów Funkcje nieliniowe Procedura z redukcją kroku iteracji Przykłady zastosowań Dopasowanie funkcji wykładniczej Dopasowanie funkcji
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Dobór parametrów regulatora - symulacja komputerowa. Najprostszy układ automatycznej regulacji można przedstawić za pomocą
 Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
5. Rozwiązywanie układów równań liniowych
 5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a