Podstawy analizy strukturalnej układów kinematycznych
|
|
|
- Bronisława Malinowska
- 6 lat temu
- Przeglądów:
Transkrypt
 połączonych ze sobą w sposób umożliwiający ruch")
 i analizą własności ruchowych")
1 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez naturę lub człowieka do wypełniania celowych funkcji. Analiza strukturalna zajmuje się badaniem struktury (budowy) i analizą własności ruchowych układów kinematycznych.

2
3
4 Połączenia ruchowe Napędy Człony
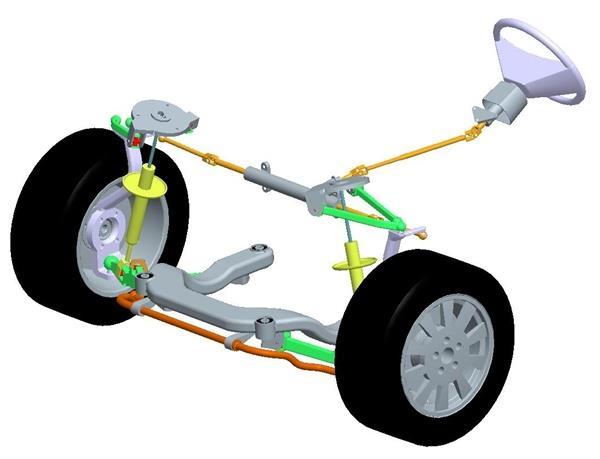
5 Budowa układów kinematycznych Układ rzeczywisty
6
7 Budowa układów kinematycznych Schemat kinematyczny
8 Budowa układów kinematycznych Układ rzeczywisty

9 Budowa układów kinematycznych Układ rzeczywisty
10 Budowa układów kinematycznych Schemat kinematyczny
11 Budowa układów kinematycznych Układ rzeczywisty

12 Budowa układów kinematycznych Układ rzeczywisty
13 Budowa układów kinematycznych Schemat kinematyczny

14 Budowa układów kinematycznych Układ rzeczywisty
15 Przykłady
16 Przykłady
17 Człony Człon to element układu kinematycznego, który wchodzi w połączenia ruchowe z innymi członami. Podział funkcjonalny członów: człon nieruchomy (podstawa ) - 0 człony czynne (napędowe) 2 człony bierne (napędzane) 1 człony pośredniczące 3
18 Człony podział ze względu na węzłowość
19 Człony schematyzacja

20 20

21 21
22 22

23 23

24 Pary kinematyczne Para kinematyczna
25 Pary kinematyczne Para kinematyczna to ruchowe połączenie dwóch członów, połączenie dające łączonym członom możliwość wykonywania ruchów względnych. Podziały par kinematycznych: - według rodzaju styku tworzących członów - według stopni swobody ruchu względnego


26 Pary kinematyczne podział według rodzaju styku tworzących członów Pary kinematyczne dzielimy na: niższe, wyższe, mieszane.
27 Pary kinematyczne podział według stopni swobody ruchu względnego Pary kinematyczne dzielimy na klasy według liczby stopni swobody jednego członu względem drugiego członu pary. Stopnie swobody swobodnego członu (6 stopni swobody) Pary: I klasy jeden stopień swobody II klasy dwa stopnie swobody III klasy trzy stopnie swobody IV klasy cztery stopnie swobody V klasy pięć stopni swobody


28 Pary kinematyczne podział na klasy Para I klasy - obrotowa Para I klasy - postępowa Para II klasy - cylindryczna Para III klasy - sferyczna


 II klasy przegub")
29 Pary kinematyczne podział na klasy Para I klasy - postępowa Para III klasy - płaszczyznowa R 1,R 2 Para IV klasy Para V klasy Para (węzeł) II klasy przegub Cardana
30 Pary kinematyczne płaskie Klasy par płaskich: I jeden stopień swobody II dwa stopnie swobody Stopnie swobody swobodnego płaskiego członu (3 stopnie swobody)
31
32 Pary kinematyczne płaskie podział na klasy TR R Para II - krzywkowa Para I - obrotowa R T TR Para II - zębata Para I - postępowa T TR Para II - jarzmowa







33
 c) e) b) d) Łańcuchy dzielimy na: - otwarte (a) - zamknięte (b, c, d, e) - płaskie (a, b, c, d) - przestrzenne (e) - ruchliwe (a, b, d,")
34 Łańcuchy kinematyczne Łańcuchem kinematycznym nazywamy szereg członów połączonych ze sobą parami kinematycznymi. a) c) e) b) d) Łańcuchy dzielimy na: - otwarte (a) - zamknięte (b, c, d, e) - płaskie (a, b, c, d) - przestrzenne (e) - ruchliwe (a, b, d, e) - nieruchliwe sztywne (c)
35 Łańcuchy kinematyczne ruchliwość W W=1 W=2 W>0 - łańcuchy ruchliwe W=0 - łańcuchy nieruchliwe (sztywne) W<0 - łańcuchy nieruchliwe (przesztywnione)
36 Łańcuchy kinematyczne ruchliwość W Struktura mechanizmu: n- liczba członów p 1 liczba par I klasy p 2 liczba par II klasy p 3 liczba par III klasy p 4 liczba par IV klasy p 5 liczba par V klasy n-1 - liczba członów ruchomych 6(n-1) - liczba stopni swobody członów ruchomych 6-i - liczba stopni swobody odebranych przez jedną parę i-tej klasy W= 6(n-1) -5p 1-4p 2-3p 3-2p 4 -p 5
37 Łańcuchy kinematyczne płaskie ruchliwość W Struktura mechanizmu płaskiego: n- liczba członów p 1 liczba par I klasy p 2 liczba par II klasy n-1 - liczba członów ruchomych 3(n-1) - liczba stopni swobody członów ruchomych 3-i - liczba stopni swobody odebranych przez jedną parę i-tej klasy W= 3(n-1) -2p 1 -p 2
38 Łańcuchy kinematyczne ruchliwość W III I 6 5 I I 4 7 I III 3 1 I I 2 8 III n=8 p 1 =6 p 3 =3 p 2 = p 4 = p 5 =0 W= 6(n-1) 5p 1 4p 2 3p 3 2p 4 p 5 W= 6(8-1) -5x6 3x3 = 3
39 Łańcuchy kinematyczne ruchliwość W W=3 Układ kinematyczny jest jednobieżny jeżeli liczba członów czynnych (napędów) jest równa ruchliwości. Mechanizmem nazywamy jednobieżny łańcuch kinematyczny zaprojektowany do przekształcanie ruchu jednego lub kilku członów na ruch innych członów.
40 Łańcuchy kinematyczne ruchliwość W II 13 3 I 12 I II 14 I 24 4 n = 4 p 1 = 3 p 2 =2 W= 3(n-1) 2p 1 p 2 W= 3(4-1) 2x3-2 = 1
41 Interpretacja ruchliwości W R = W W L + R B W R - ruchliwość rzeczywista W - ruchliwość teoretyczna W L - ruchliwość lokalna R B - więzy bierne
42 Ruchliwość lokalna W L n=4 p 1 =3 p 2 =1 W = 3(n-1) - 2p 1 - p 2 W=2



43 Ruchliwość lokalna W L W=2 W R =2 W R =W-W L W R =1 W L =0 W L =1
44 Ruchliwość lokalna W L W=1 W R =1 W L =0 n=4 p 1 =4 p 2 =0 W = 3(n-1) - 2p 1 - p 2 W=1 W R =0 W L =1
45 Ruchliwość lokalna W L
46 Więzy bierne b AB=CD AD=BC DF=CE a = b a n 4; p1 4; p2 0 W 3( n 1) 2 p 1 p 2 1 EF= CD W R = W= 1
47 Więzy bierne n= 5 p 1 = 6 p 2 =0 b a AB=CD AD=BC DF=CE EF=CD a = b R B - więzy bierne - dodatkowe, zbędne kinematycznie ograniczenia ruchu W = 3(n-1) - 2p 1 + p 2 = 0 W R = 1 W= 0 W R = W + R B R B = 1
48 Więzy bierne b a AB=CD AD=BC DF=CE EF=CD a = b W R = 1 W = 0 R B = 1 Układ nieracjonalny R B >0 b a a b DF CE EF CD W R = 0 W = 0
49 Więzy bierne ) 6( 0,,, B R T R W W p n W p p p p p n Układ racjonalny R B =0
50 Więzy bierne n 2 p 1 p 1 p, p, W 6( n 1) 5p1 4 p2 3 W 3 1 W R p 5 0 W R W R B RB 4 UKŁAD Z WIĘZAMI BIERNYMI - NIERACJONALNY R B >0
51 Więzy bierne UKŁAD Z WIĘZAMI BIERNYMI - NIERACJONALNY a 0 0 h 0 a 0 h
52 Więzy bierne Modyfikacja struktury, aby układ był racjonalny: R B = 0 W R = W W L = 0 n = 2 pi 2 brak więzów biernych, brak ruchliwości lokalnych, wirnik powinien tworzyć z podstawą dwie pary kinematyczne A i B. W = 6(n-1) -5p 1-4p 2-3p 3-2p 4-1p 5 1 = =
53 Więzy bierne Rozwiązanie: n = 2, p 3 = 1, p 4 = 1 UKŁAD BEZ WIĘZÓW BIERNYCH - RACJONALNY
54 Układy racjonalne i nieracjonalne Mechanizmy bez więzów biernych (R B =0) to są układy racjonalne. Ruch jest możliwy dla dowolnych warunków geometrycznych. Mechanizmy z więzami biernymi (R B >0) to układy nieracjonalne. Są to układy teoretycznie sztywne (W<=0). Ruch układu z więzami biernymi jest możliwy tylko dla szczególnych warunków geometrycznych. Odchyłki wymiarów liniowych i kątowych zawsze skutkują kłopotami montażowymi, dodatkowymi siłami, obniżeniem trwałości układu kinematycznego. W praktyce należy projektować układy racjonalne. Odstępstwo od tej zasady może być tylko świadome! 54
55 Układy racjonalne i nieracjonalne Układ racjonalny Układ nieracjonalny


56 Układy racjonalne i nieracjonalne Układ racjonalny Układ nieracjonalny
57 Więzy bierne
58 Klasyfikacja strukturalna rodziny mechanizmów RODZINY MECHANIZMÓW wg. Leonida Assura ( ), Iwana Artobolevskiego ( ) Kryterium podziału: liczba wspólnych więzów przestrzenne płaskie klinowe brak więzów dozwolone wszystkie ruchy T Y R Z T X liniowe
59 Klasyfikacja strukturalna klasy mechanizmów Mechanizm płaski, ruchliwość W = 1 W g = 0 W 0 =1 1 człon czynny W = W 0 + W g 1 = 1 + 0
60 Klasyfikacja strukturalna grupy strukturalne (grupy Assura) W g = 0 W g = 3k - 2p 1 (zakładamy p 2 = 0) k p Grupy II klasy: k = 2, p 1 = 3 3R T2R RTR TRT 2TR
61 Klasyfikacja strukturalna grupy strukturalne (grupy Assura) Grupy III klasy: k = 4, p 1 = 6 Grupa IV klasy: k = 4, p 1 = 6
62 Klasyfikacja strukturalna klasy mechanizmów W g1 = 0 Ruchliwość W = 1 W g2 = 0 W 0 =1 W = W 0 + W g1 + W g2 = klasa mechanizmu = klasa najwyższej grupy
63 Klasyfikacja strukturalna klasy mechanizmów grupa II klasy człon czynny grupa II klasy MECHANIZM II KLASY
64 Klasyfikacja strukturalna klasy mechanizmów grupa III klasy MECHANIZM III KLASY człon czynny
65
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
KINEMATYKA POŁĄCZEŃ STAWOWYCH
 KINEMATYKA POŁĄCZEŃ STAWOWYCH RUCHOMOŚĆ STAWÓW Ruchomość określa zakres ruchów w stawach, jedną z funkcjonalnych właściwości połączeń stawowych. WyróŜniamy ruchomość: czynną zakres ruchu jaki uzyskamy
KINEMATYKA POŁĄCZEŃ STAWOWYCH RUCHOMOŚĆ STAWÓW Ruchomość określa zakres ruchów w stawach, jedną z funkcjonalnych właściwości połączeń stawowych. WyróŜniamy ruchomość: czynną zakres ruchu jaki uzyskamy
Z poprzedniego wykładu:
 Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Teoria maszyn mechanizmów
 Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
TEORIA MASZYN MECHANIZMÓW ĆWICZENIA LABORATORYJNE Badanie struktury modeli mechanizmów w laboratorium.
 MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 1 str. 1 MiBM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN MECHANIZMÓW
MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 1 str. 1 MiBM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN MECHANIZMÓW
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Ogłoszenie. Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz
 Laboratorium Badań Technoklimatycznych i Maszyn Roboczych Ogłoszenie Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz. 9 00 12 00. II
Laboratorium Badań Technoklimatycznych i Maszyn Roboczych Ogłoszenie Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz. 9 00 12 00. II
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Z poprzedniego wykładu:
 Z orzedniego wykładu: Człon: Ciało stałe osiadające możliwość oruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stoni swobody) Niższe i wyższe ary kinematyczne
Z orzedniego wykładu: Człon: Ciało stałe osiadające możliwość oruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stoni swobody) Niższe i wyższe ary kinematyczne
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
ANTONI GRONOWICZ, STEFAN MILLER MECHANIZMY METODY TWORZENIA ZBIORÓW ROZWI ZAÑ ALTERNATYWNYCH KATALOG SCHEMATÓW STRUKTURALNYCH I KINEMATYCZNYCH
 ANTONI GRONOWICZ, STEFAN MILLER MECHANIZMY METODY TWORZENIA ZBIORÓW ROZWI ZAÑ ALTERNATYWNYCH KATALOG SCHEMATÓW STRUKTURALNYCH I KINEMATYCZNYCH Spis treœci 1. WPROWADZENIE................................................................
ANTONI GRONOWICZ, STEFAN MILLER MECHANIZMY METODY TWORZENIA ZBIORÓW ROZWI ZAÑ ALTERNATYWNYCH KATALOG SCHEMATÓW STRUKTURALNYCH I KINEMATYCZNYCH Spis treœci 1. WPROWADZENIE................................................................
Teoria maszyn i podstawy automatyki ćwiczenia projektowe Wydział Samochodów i Maszyn Roboczych
 grupa 1 (poniedziałek, 8-10, s. 2.19, mgr inż. M. Bieliński) grupa 2 (poniedziałek, 8-10, s. 2.19, mgr inż. R. Nowak) grupa 7 (poniedziałek, 17-19, s. 2.19, mgr inż. M. Bieliński) grupa 8 (poniedziałek,
grupa 1 (poniedziałek, 8-10, s. 2.19, mgr inż. M. Bieliński) grupa 2 (poniedziałek, 8-10, s. 2.19, mgr inż. R. Nowak) grupa 7 (poniedziałek, 17-19, s. 2.19, mgr inż. M. Bieliński) grupa 8 (poniedziałek,
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
AiR. Podstawy modelowania i syntezy mechanizmów. Ćwiczenie laboratoryjne nr 2 str. 1. PMiSM-2017
 AiR. Podstawy modelowania i syntezy mechanizmów. Ćwiczenie laboratoryjne nr 2 str. Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki PMiSM-207 PODSTAWY
AiR. Podstawy modelowania i syntezy mechanizmów. Ćwiczenie laboratoryjne nr 2 str. Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki PMiSM-207 PODSTAWY
Roboty przemysłowe. Wprowadzenie
 Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Kiść robota. Rys. 1. Miejsce zabudowy chwytaka w robocie IRb-6.
 Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. kiści. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia
Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. kiści. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia
Teoria Maszyn i Dynamika Mechanizmów II
 Teoria Maszyn i Dynamika Mechanizmów II Wydział Mechaniczny, Kierunek studiów: Mechatronika, studia II stopnia (magisterskie), rok akademicki: 2010/2011 Liczba godzin: wykład 15 ćwiczenia 15 Wykład: prof.
Teoria Maszyn i Dynamika Mechanizmów II Wydział Mechaniczny, Kierunek studiów: Mechatronika, studia II stopnia (magisterskie), rok akademicki: 2010/2011 Liczba godzin: wykład 15 ćwiczenia 15 Wykład: prof.
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka
 Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
ANALIZA KINEMATYCZNA PALCÓW RĘKI
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 111-116, Gliwice 2010 ANALIZA KINEMATYCZNA PALCÓW RĘKI ANTONI JOHN, AGNIESZKA MUSIOLIK Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki, Politechnika
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 111-116, Gliwice 2010 ANALIZA KINEMATYCZNA PALCÓW RĘKI ANTONI JOHN, AGNIESZKA MUSIOLIK Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki, Politechnika
Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 1 Podstawowe pojęcia i analiza strukturalna Mechanizmy dźwigniowe
 Wykład 1 Podstawowe pojęcia i analiza strukturalna Mechanizmy dźwigniowe") Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 1 Podstawowe pojęcia i analiza strukturalna Mechanizmy dźwigniowe Lublin
Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 1 Podstawowe pojęcia i analiza strukturalna Mechanizmy dźwigniowe Lublin
PRZEKŁADNIE ZĘBATE. Przekł. o osiach stałych. Przekładnie obiegowe. Planetarne: W=1 Różnicowe i sumujące: W>1
 PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
ZARYS TEORII MECHANIZMÓW I MASZYN
 cssno JAN ODERFELD ZARYS TEORII MECHANIZMÓW I MASZYN ŁÓDŹ - 1959 - WARSZAWA PAŃSTWOWE WYDAWNICTWO NAUKOWE Spia- rzeczy SPIS' RZECZY Pr a edmowa... 4... *.... 3 1. Wstęp '. 5 2. Struktura mechanizmów-k
cssno JAN ODERFELD ZARYS TEORII MECHANIZMÓW I MASZYN ŁÓDŹ - 1959 - WARSZAWA PAŃSTWOWE WYDAWNICTWO NAUKOWE Spia- rzeczy SPIS' RZECZY Pr a edmowa... 4... *.... 3 1. Wstęp '. 5 2. Struktura mechanizmów-k
Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1. MECHANIKA OGÓLNA - lista zadań 2016/17
 Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1 MECHANIKA OGÓLNA - lista zadań 2016/17 Część 1 analiza kinematyczna układów płaskich Przeprowadzić analizę kinematyczną układu. Odpowiednią
Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1 MECHANIKA OGÓLNA - lista zadań 2016/17 Część 1 analiza kinematyczna układów płaskich Przeprowadzić analizę kinematyczną układu. Odpowiednią
Wykład 1 Podstawowe pojęcia i analiza strukturalna Mechanizmy dźwigniowe
 Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 1 Podstawowe pojęcia i analiza strukturalna Mechanizmy dźwigniowe Lublin
Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 1 Podstawowe pojęcia i analiza strukturalna Mechanizmy dźwigniowe Lublin
NOWE METODY SYNTEZY STRUKTURALNEJ ŁAŃCUCHÓW KINEMATYCZNYCH O ZEROWEJ LICZBIE STOPNI SWOBODY
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 8, s. 18-19, Gliwice 2009 NOWE METODY SYNTEZY STRUKTURALNEJ ŁAŃCUCHÓW KINEMATYCZNYCH O ZEROWEJ LICZBIE STOPNI SWOBODY KRYSTYNA ROMANIAK Wydział Architektury, Politechnika
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 8, s. 18-19, Gliwice 2009 NOWE METODY SYNTEZY STRUKTURALNEJ ŁAŃCUCHÓW KINEMATYCZNYCH O ZEROWEJ LICZBIE STOPNI SWOBODY KRYSTYNA ROMANIAK Wydział Architektury, Politechnika
Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów Prof. dr hab. inż. Janusz Frączek Instytut
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów Prof. dr hab. inż. Janusz Frączek Instytut
PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE
 PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE Podstawy statyki budowli: Pojęcia podstawowe Model matematyczny, w odniesieniu do konstrukcji budowlanej, opisuje ją za pomocą zmiennych. Wartości zmiennych
PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE Podstawy statyki budowli: Pojęcia podstawowe Model matematyczny, w odniesieniu do konstrukcji budowlanej, opisuje ją za pomocą zmiennych. Wartości zmiennych
4.1. Modelowanie matematyczne
 4.1. Modelowanie matematyczne Model matematyczny Model matematyczny opisuje daną konstrukcję budowlaną za pomocą zmiennych. Wartości zmiennych będą należały to zbioru liczb rzeczywistych i będą one reprezentować
4.1. Modelowanie matematyczne Model matematyczny Model matematyczny opisuje daną konstrukcję budowlaną za pomocą zmiennych. Wartości zmiennych będą należały to zbioru liczb rzeczywistych i będą one reprezentować
Mechanika teoretyczna
 Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Teoria mechanizmów Prof. dr hab. inż. Krzysztof Czołczyński Katedra Dynamiki Maszyn pok. 124a
 Teoria mechanizmów Prof. dr hab. inż. Krzysztof Czołczyński Katedra Dynamiki Maszyn pok. 124a Mechanizm Mechanizmem nazywa się układ połączonych ze sobą ciał (ogniw) o ściśle określonym ruchu względnym.
Teoria mechanizmów Prof. dr hab. inż. Krzysztof Czołczyński Katedra Dynamiki Maszyn pok. 124a Mechanizm Mechanizmem nazywa się układ połączonych ze sobą ciał (ogniw) o ściśle określonym ruchu względnym.
 Wydawnictwo
Wydawnictwo Analiza wpływu tarcia na reakcje w parach kinematycznych i sprawność i mechanizmów.
 Automatyka i Robotyka. Podstawy modelowania i syntezy mechanizmów arcie w parach kinematycznych mechanizmów 1 ARCIE W PARACH KINEMAYCZNYCH MECHANIZMÓW Analiza wpływu tarcia na reakcje w parach kinematycznych
Automatyka i Robotyka. Podstawy modelowania i syntezy mechanizmów arcie w parach kinematycznych mechanizmów 1 ARCIE W PARACH KINEMAYCZNYCH MECHANIZMÓW Analiza wpływu tarcia na reakcje w parach kinematycznych
Elementy dynamiki mechanizmów
 Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
UKŁADY WIELOCZŁONOWE Z WIĘZAMI JEDNOSTRONNYMI W ZASTOSOWANIU DO MODELOWANIA ZŁOŻONYCH UKŁADÓW MECHANICZNYCH
 POLITECHNIKA GDAŃSKA KRZYSZTOF LIPIŃSKI UKŁADY WIELOCZŁONOWE Z WIĘZAMI JEDNOSTRONNYMI W ZASTOSOWANIU DO MODELOWANIA ZŁOŻONYCH UKŁADÓW MECHANICZNYCH GDAŃSK 2012 PRZEWODNICZĄCY KOMITETU REDAKCYJNEGO WYDAWNICTWA
POLITECHNIKA GDAŃSKA KRZYSZTOF LIPIŃSKI UKŁADY WIELOCZŁONOWE Z WIĘZAMI JEDNOSTRONNYMI W ZASTOSOWANIU DO MODELOWANIA ZŁOŻONYCH UKŁADÓW MECHANICZNYCH GDAŃSK 2012 PRZEWODNICZĄCY KOMITETU REDAKCYJNEGO WYDAWNICTWA
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
 Część 1 8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH 1 8. 8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH 8.1. Analiza kinematyczna płaskiego układu tarcz sztywnych. Układy statycznie
Część 1 8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH 1 8. 8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH 8.1. Analiza kinematyczna płaskiego układu tarcz sztywnych. Układy statycznie
Dynamika mechanizmów
 Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
MORFOLOGIA W UJĘCIU BIOMECHANICZNYM
 MORFOLOGIA W UJĘCIU BIOMECHANICZNYM * geometria * wielkości geometryczne * goniometria * pomiary goniometryczne * struktura układu nośnego człowieka * stopnie swobody * ruchliwość * pary biokinematyczne
MORFOLOGIA W UJĘCIU BIOMECHANICZNYM * geometria * wielkości geometryczne * goniometria * pomiary goniometryczne * struktura układu nośnego człowieka * stopnie swobody * ruchliwość * pary biokinematyczne
Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Roboty przemysłowe. Cz. II
 Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
STEROWANIE A REGULACJA
 STEROWANIE A REGULACJA Sterowanie to proces nerwowo-mięśniowy (dwukierunkowy) - współdziałanie ukł. nerwowego z ukł. mięśniowym - podporządkowanie ukł. mięśniowego (ukł. sterowania) układowi nerwowemu
STEROWANIE A REGULACJA Sterowanie to proces nerwowo-mięśniowy (dwukierunkowy) - współdziałanie ukł. nerwowego z ukł. mięśniowym - podporządkowanie ukł. mięśniowego (ukł. sterowania) układowi nerwowemu
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
5.1. Kratownice płaskie
 .. Kratownice płaskie... Definicja kratownicy płaskiej Kratownica płaska jest to układ prętowy złożony z prętów prostych, które są połączone między sobą za pomocą przegubów, Nazywamy je węzłami kratownicy.
.. Kratownice płaskie... Definicja kratownicy płaskiej Kratownica płaska jest to układ prętowy złożony z prętów prostych, które są połączone między sobą za pomocą przegubów, Nazywamy je węzłami kratownicy.
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 19/10
 PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Elementy dynamiki mechanizmów
 Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
WYZNACZANIE REAKCJI WIĘZÓW W UKŁADZIE TARCZ SZTYWNYCH
 POLITECHNIKA POZNAŃSKA INSTYTUT KONSTRUKCJI BUDOWLANYCH Zakład Mechaniki Budowli ĆWICZENIE nr 1 WYZNACZANIE REAKCJI WIĘZÓW W UKŁADZIE TARCZ SZTYWNYCH Prowadzący: mgr inŝ. A. Kaczor STUDIA DZIENNE MAGISTERSKIE,
POLITECHNIKA POZNAŃSKA INSTYTUT KONSTRUKCJI BUDOWLANYCH Zakład Mechaniki Budowli ĆWICZENIE nr 1 WYZNACZANIE REAKCJI WIĘZÓW W UKŁADZIE TARCZ SZTYWNYCH Prowadzący: mgr inŝ. A. Kaczor STUDIA DZIENNE MAGISTERSKIE,
KARTA MODUŁU KSZTAŁCENIA
 KARTA MODUŁU KSZTAŁCENIA I. 1 Nazwa modułu kształcenia Mechanika teoretyczna Informacje ogólne 2 Nazwa jednostki prowadzącej moduł Państwowa Szkoła Wyższa im. Papieża Jana Pawła II,Katedra Nauk Technicznych,
KARTA MODUŁU KSZTAŁCENIA I. 1 Nazwa modułu kształcenia Mechanika teoretyczna Informacje ogólne 2 Nazwa jednostki prowadzącej moduł Państwowa Szkoła Wyższa im. Papieża Jana Pawła II,Katedra Nauk Technicznych,
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
PL 213839 B1. Manipulator równoległy trójramienny o zamkniętym łańcuchu kinematycznym typu Delta, o trzech stopniach swobody
 PL 213839 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213839 (13) B1 (21) Numer zgłoszenia: 394237 (51) Int.Cl. B25J 18/04 (2006.01) B25J 9/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 213839 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213839 (13) B1 (21) Numer zgłoszenia: 394237 (51) Int.Cl. B25J 18/04 (2006.01) B25J 9/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
1. ANALIZA KINAMATYCZNA PŁASKICH UKŁADÓW PRĘTOWYCH
 1 1.1. Płaskie układy tarcz sztywnych naliza kinematyczna służy nam do określenia czy dany układ spełnia wszystkie warunki aby być konstrukcją budowlaną. Podstawowym pojęciem stosowanym w analizie kinematycznej
1 1.1. Płaskie układy tarcz sztywnych naliza kinematyczna służy nam do określenia czy dany układ spełnia wszystkie warunki aby być konstrukcją budowlaną. Podstawowym pojęciem stosowanym w analizie kinematycznej
Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie
 Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie materiały pomocnicze do zajęć audytoryjnych i projektowych opracowanie: dr inż. Piotr Dębski, dr inż. Dariusz Zaręba
Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie materiały pomocnicze do zajęć audytoryjnych i projektowych opracowanie: dr inż. Piotr Dębski, dr inż. Dariusz Zaręba
PL B1. HIKISZ BARTOSZ, Łódź, PL BUP 05/07. BARTOSZ HIKISZ, Łódź, PL WUP 01/16. rzecz. pat.
 PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Teoria maszyn i mechanizmów Kod przedmiotu
 Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
(12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1
 OPIS PATENTOWY (19) PL (11) 174940 (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 305007 (22) Data zgłoszenia: 12.09.1994 (51) IntCl6: B25J 9/06 B25J
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 305007 (22) Data zgłoszenia: 12.09.1994 (51) IntCl6: B25J 9/06 B25J
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: Wykład TEORIA MASZYN I MECHANIZMÓW Theory of machines and mechanisms Poziom przedmiotu: I stopnia Liczba godzin/tydzień:
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: Wykład TEORIA MASZYN I MECHANIZMÓW Theory of machines and mechanisms Poziom przedmiotu: I stopnia Liczba godzin/tydzień:
Kinematyka manipulatorów robotów
 Wstęp do Robotyki c W. Szynkiewicz, 29 1 Podstawowe pojęcia: Kinematyka manipulatorów robotów Ogniwo(człon, ramię) bryła sztywna(zbiór punktów materialnych, których wzajemne położenie jest stałe). Przegub(złącze)
Wstęp do Robotyki c W. Szynkiewicz, 29 1 Podstawowe pojęcia: Kinematyka manipulatorów robotów Ogniwo(człon, ramię) bryła sztywna(zbiór punktów materialnych, których wzajemne położenie jest stałe). Przegub(złącze)
INSTRUKCJA DO ĆWICZENIA NR 2. Analiza kinematyczna napędu z przekładniami
 INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym
 Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym Dr inż. Tomasz Buratowski Wydział inżynierii Mechanicznej i Robotyki Katedra Robotyki i Mechatroniki Bezpieczna Obsługa Robota Podstawowe
Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym Dr inż. Tomasz Buratowski Wydział inżynierii Mechanicznej i Robotyki Katedra Robotyki i Mechatroniki Bezpieczna Obsługa Robota Podstawowe
Spis treści. Przedmowa... 7
 Spis treści SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac przygotowanych... 22 1.4. Przyrost funkcji i wariacja funkcji...
Spis treści SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac przygotowanych... 22 1.4. Przyrost funkcji i wariacja funkcji...
Schematy kinematyczne. Technologia napraw - ćwiczenia 133
 Schematy kinematyczne Technologia napraw - ćwiczenia 133 Plan zajęć Wprowadzenie Schemat - definicja Rodzaje schematów Schemat kinematyczny zasadniczy Schemat kinematyczny vs. normy Zasady wykonywania
Schematy kinematyczne Technologia napraw - ćwiczenia 133 Plan zajęć Wprowadzenie Schemat - definicja Rodzaje schematów Schemat kinematyczny zasadniczy Schemat kinematyczny vs. normy Zasady wykonywania
Analiza mechanizmu korbowo-suwakowego
 Cel ćwiczenia: Metody modelowania i symulacji kinematyki i dynamiki z wykorzystaniem CAD/CAE Laboratorium I Analiza mechanizmu korbowo-suwakowego Celem ćwiczenia jest zapoznanie ze środowiskiem symulacji
Cel ćwiczenia: Metody modelowania i symulacji kinematyki i dynamiki z wykorzystaniem CAD/CAE Laboratorium I Analiza mechanizmu korbowo-suwakowego Celem ćwiczenia jest zapoznanie ze środowiskiem symulacji
Roboty manipulacyjne (stacjonarne)
") Roboty manipulacyjne (stacjonarne) Podstawowe układy i zespoły Roboty przemysłowe składa się z następujących trzech podstawowych układów: zasilania, sterowania i ruchu. Układ zasilania Układ zasilania
Roboty manipulacyjne (stacjonarne) Podstawowe układy i zespoły Roboty przemysłowe składa się z następujących trzech podstawowych układów: zasilania, sterowania i ruchu. Układ zasilania Układ zasilania
Modelowanie i Wizualizowanie 3W grafiki. Łańcuchy kinematyczne
 Modelowanie i Wizualizowanie 3W grafiki. Łańcuchy kinematyczne Aleksander Denisiuk Uniwersytet Warmińsko-Mazurski Olsztyn, ul. Słoneczna 54 denisjuk@matman.uwm.edu.pl 1 / 31 Łańcuchy kinematyczne Najnowsza
Modelowanie i Wizualizowanie 3W grafiki. Łańcuchy kinematyczne Aleksander Denisiuk Uniwersytet Warmińsko-Mazurski Olsztyn, ul. Słoneczna 54 denisjuk@matman.uwm.edu.pl 1 / 31 Łańcuchy kinematyczne Najnowsza
Analiza kinematyczna mechanizmów. Środki obrotu
 Analiza kinemayczna mechanizmów Środki obrou Meody określania środków obrou w mechanizmach S 23 2 1 3 S 34 4 S 12 S 14 Środki obrou: rwałe (S 12, S 14, S 23, S 34 ) rwałe sałe (S 12, S 14 ) Ile jes środków
Analiza kinemayczna mechanizmów Środki obrou Meody określania środków obrou w mechanizmach S 23 2 1 3 S 34 4 S 12 S 14 Środki obrou: rwałe (S 12, S 14, S 23, S 34 ) rwałe sałe (S 12, S 14 ) Ile jes środków
PL B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL INSTYTUT TECHNOLOGII EKSPLOATACJI. PAŃSTWOWY INSTYTUT BADAWCZY, Radom, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207917 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 380341 (22) Data zgłoszenia: 31.07.2006 (51) Int.Cl. G01B 21/04 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207917 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 380341 (22) Data zgłoszenia: 31.07.2006 (51) Int.Cl. G01B 21/04 (2006.01)
WIERZBICKI JĘDRZEJ. 4 (ns)
") WIERZBICKI JĘDRZEJ 4 (ns) CZĘŚĆ 1a BELKA 1. Zadanie Przeprowadzić analizę kinematyczną oraz wyznaczyć reakcje w więzach belki, danej schematem przedstawionym na rys. 1. Wymiary oraz obciążenia przyjąć
WIERZBICKI JĘDRZEJ 4 (ns) CZĘŚĆ 1a BELKA 1. Zadanie Przeprowadzić analizę kinematyczną oraz wyznaczyć reakcje w więzach belki, danej schematem przedstawionym na rys. 1. Wymiary oraz obciążenia przyjąć
Materiały dydaktyczne. Mechanika. Semestr I. Wykłady
 Materiały dydaktyczne Mechanika Semestr I Wykłady 8. Przedmiot: MECHANIKA Kierunek: Mechatronika Specjalność: elektroautomatyka okrętowa Rozkład zajęć w czasie studiów Studia pierwszego stopnia Liczba
Materiały dydaktyczne Mechanika Semestr I Wykłady 8. Przedmiot: MECHANIKA Kierunek: Mechatronika Specjalność: elektroautomatyka okrętowa Rozkład zajęć w czasie studiów Studia pierwszego stopnia Liczba
WYZNACZANIE SIŁ WEWNĘTRZNYCH W BELCE
 POLITECHNIKA POZNAŃSKA INSTYTUT KONSTRUKCJI BUDOWLANYCH Zakład Mechaniki Budowli ĆWICZENIE nr 2 WYZNACZANIE SIŁ WEWNĘTRZNYCH W BELCE Prowadzący: mgr inŝ. A. Kaczor STUDIA DZIENNE MAGISTERSKIE, I ROK Wykonał:
POLITECHNIKA POZNAŃSKA INSTYTUT KONSTRUKCJI BUDOWLANYCH Zakład Mechaniki Budowli ĆWICZENIE nr 2 WYZNACZANIE SIŁ WEWNĘTRZNYCH W BELCE Prowadzący: mgr inŝ. A. Kaczor STUDIA DZIENNE MAGISTERSKIE, I ROK Wykonał:
Mechanika. Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji.
 Mechanika Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji. Przyłożenie układu zerowego (układ sił równoważących się, np. dwie siły o takiej samej mierze,
Mechanika Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji. Przyłożenie układu zerowego (układ sił równoważących się, np. dwie siły o takiej samej mierze,
W budowie maszyn poprzez sprzęgło rozumie się urządzenie (mechanizm) służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego
 służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego") SPRZĘGŁA W budowie maszyn poprzez sprzęgło rozumie się urządzenie (mechanizm) służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego bez zmiany jego wartości i kierunku. W ogólnym
SPRZĘGŁA W budowie maszyn poprzez sprzęgło rozumie się urządzenie (mechanizm) służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego bez zmiany jego wartości i kierunku. W ogólnym
Zadania kinematyki mechanizmów
 Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki
Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki
PODSTAWY KONSTRUKCJI MASZYN
 KLASA I TECHNIKUM ZAWODOWE DZIAŁ : ODWZOROWANIE PRZEDMIOTÓW Stopień celujący otrzymuje uczeń, który: opanował w pełni wymagania programowe a jego wiadomości i umiejętności są twórcze (dodatkowe prace,
KLASA I TECHNIKUM ZAWODOWE DZIAŁ : ODWZOROWANIE PRZEDMIOTÓW Stopień celujący otrzymuje uczeń, który: opanował w pełni wymagania programowe a jego wiadomości i umiejętności są twórcze (dodatkowe prace,
AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA,
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207456 (13) B1 (21) Numer zgłoszenia: 382526 (51) Int.Cl. H02N 2/10 (2006.01) G11B 5/55 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207456 (13) B1 (21) Numer zgłoszenia: 382526 (51) Int.Cl. H02N 2/10 (2006.01) G11B 5/55 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
PL 203749 B1. Akademia Górniczo-Hutnicza im. Stanisława Staszica,Kraków,PL 17.10.2005 BUP 21/05. Bogdan Sapiński,Kraków,PL Sławomir Bydoń,Kraków,PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 203749 (13) B1 (21) Numer zgłoszenia: 367146 (51) Int.Cl. B25J 9/10 (2006.01) G05G 15/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 203749 (13) B1 (21) Numer zgłoszenia: 367146 (51) Int.Cl. B25J 9/10 (2006.01) G05G 15/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Egzamin 1 Strona 1. Egzamin - AR egz Zad 1. Rozwiązanie: Zad. 2. Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same
 Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
PAiTM - zima 2014/2015
 PAiTM - zima 204/205 Wyznaczanie przyspieszeń mechanizmu płaskiego metodą planu przyspieszeń (metoda wykreślna) Dane: geometria mechanizmu (wymiary elementów, ich położenie i orientacja) oraz stała prędkość
PAiTM - zima 204/205 Wyznaczanie przyspieszeń mechanizmu płaskiego metodą planu przyspieszeń (metoda wykreślna) Dane: geometria mechanizmu (wymiary elementów, ich położenie i orientacja) oraz stała prędkość
Mechanika teoretyczna
 Inne rodzaje obciążeń Mechanika teoretyczna Obciążenie osiowe rozłożone wzdłuż pręta. Obciążenie pionowe na pręcie ukośnym: intensywność na jednostkę rzutu; intensywność na jednostkę długości pręta. Wykład
Inne rodzaje obciążeń Mechanika teoretyczna Obciążenie osiowe rozłożone wzdłuż pręta. Obciążenie pionowe na pręcie ukośnym: intensywność na jednostkę rzutu; intensywność na jednostkę długości pręta. Wykład
Przekładnie niepełnoobrotowe GS 50.3 GS z podstawą i dźwignią
 Przekładnie niepełnoobrotowe GS 50.3 GS 250.3 z podstawą i dźwignią Stosować tylko w połączeniu z instrukcją obsługi! Niniejsza krótka instrukcja NIE zastępuje instrukcji obsługi! Jest ona przeznaczona
Przekładnie niepełnoobrotowe GS 50.3 GS 250.3 z podstawą i dźwignią Stosować tylko w połączeniu z instrukcją obsługi! Niniejsza krótka instrukcja NIE zastępuje instrukcji obsługi! Jest ona przeznaczona
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Biomechanika Dodawanie wektorów 1.Prostolinijny ruch post powy 2.Ruch wokół osi 3.Ruch zło ony
 Biomechanika- dotyczy układu ruchu żywego układu. Dzielimy ją na działy : -statyka -kinematyka -dynamika Statyka przedmiotem badań będzie oddziaływanie sił na ciało znajdujące się w spoczynku Kinematyka
Biomechanika- dotyczy układu ruchu żywego układu. Dzielimy ją na działy : -statyka -kinematyka -dynamika Statyka przedmiotem badań będzie oddziaływanie sił na ciało znajdujące się w spoczynku Kinematyka
wszystkie elementy modelu płaskiego są w jednej płaszczyźnie, zwanej płaszczyzną modelu
 Schemat statyczny zawiera informacje, takie jak: geometria i połoŝenie tarcz (ciał sztywnych), połączenia tarcz z fundamentem i ze sobą, rodzaj, połoŝenie i wartość obciąŝeń czynnych. wszystkie elementy
Schemat statyczny zawiera informacje, takie jak: geometria i połoŝenie tarcz (ciał sztywnych), połączenia tarcz z fundamentem i ze sobą, rodzaj, połoŝenie i wartość obciąŝeń czynnych. wszystkie elementy
PL B1. NOWAK ANDRZEJ, Terebiń, PL BUP 17/16. ANDRZEJ NOWAK, Terebiń, PL WUP 12/17. rzecz. pat.
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227579 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 415255 (22) Data zgłoszenia: 11.12.2015 (51) Int.Cl. E21B 7/02 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227579 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 415255 (22) Data zgłoszenia: 11.12.2015 (51) Int.Cl. E21B 7/02 (2006.01)
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Podstawowe informacje o module
 Podstawowe informacje o module Nazwa jednostki prowadzącej studia: Wydział Budownictwa i Inżynierii środowiska Nazwa kierunku studiów: Budownictwo Obszar : nauki techniczne Profil : ogólnoakademicki Poziom
Podstawowe informacje o module Nazwa jednostki prowadzącej studia: Wydział Budownictwa i Inżynierii środowiska Nazwa kierunku studiów: Budownictwo Obszar : nauki techniczne Profil : ogólnoakademicki Poziom
TEORIA MASZYN I MECHANIZMÓW ĆWICZENIA LABORATORYJNE
 MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 5 str. 1 MiBM TMiM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN I
MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 5 str. 1 MiBM TMiM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN I
CZĘŚĆ II PARAMETRYCZNE PROJEKTOWANIE 2D
 CZĘŚĆ II PARAMETRYCZNE PROJEKTOWANIE 2D Projektowanie parametryczne jest możliwe wyłącznie za pomocą pełnej wersji programu AutoCAD. AutoCAD LT ma bardzo ograniczone możliwości w tym zakresie. Pozwala
CZĘŚĆ II PARAMETRYCZNE PROJEKTOWANIE 2D Projektowanie parametryczne jest możliwe wyłącznie za pomocą pełnej wersji programu AutoCAD. AutoCAD LT ma bardzo ograniczone możliwości w tym zakresie. Pozwala
Podstawy mechaniki. Maciej Pawłowski
 Podstawy mechaniki Maciej Pawłowski Gdańsk 2016 Recen zent prof. nadzw. dr hab. inż. Adam Cenian Książka wykorzystuje bogate doświadczenie badawcze i dydaktyczne autora, zdobyte podczas 40-letniej pracy
Podstawy mechaniki Maciej Pawłowski Gdańsk 2016 Recen zent prof. nadzw. dr hab. inż. Adam Cenian Książka wykorzystuje bogate doświadczenie badawcze i dydaktyczne autora, zdobyte podczas 40-letniej pracy
Wyznaczanie sił w przegubach maszyny o kinematyce równoległej w trakcie pracy, z wykorzystaniem metod numerycznych
 kinematyka równoległa, symulacja, model numeryczny, sterowanie mgr inż. Paweł Maślak, dr inż. Piotr Górski, dr inż. Stanisław Iżykowski, dr inż. Krzysztof Chrapek Wyznaczanie sił w przegubach maszyny o
kinematyka równoległa, symulacja, model numeryczny, sterowanie mgr inż. Paweł Maślak, dr inż. Piotr Górski, dr inż. Stanisław Iżykowski, dr inż. Krzysztof Chrapek Wyznaczanie sił w przegubach maszyny o
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 26/17
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229343 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 419886 (22) Data zgłoszenia: 20.12.2016 (51) Int.Cl. A61F 2/38 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229343 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 419886 (22) Data zgłoszenia: 20.12.2016 (51) Int.Cl. A61F 2/38 (2006.01)