PRACA DYPLOMOWA MAGISTERSKA
|
|
|
- Natalia Turek
- 9 lat temu
- Przeglądów:
Transkrypt
1 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński OPIEKUN Dr inż. Wacław Kuś WYKONAŁ Piotr Jarczyk

2 Wprowadzenie Cel pracy Celem pracy było zaprojektowanie robota mobilnego, wykonanie modelu w programie CAD, oraz szczegółowa analiza kinematyki w programie MSC. Visual Nastran. Założenia konstrukcyjne Konstrukcja robota ma umożliwić bezpieczne przemieszczanie przedmiotów o niedużych gabarytach. Powinien być mobilny i pokonywać odległości powyżej 200m; mieć ruchliwość, która pozwoli manipulować przedmiotem w małych i ciasnych pomieszczeniach.

3 Wstęp Robot z definicji Robot to urządzenie techniczne przeznaczone do realizacji niektórych funkcji manipulacyjnych i lokomocyjnych człowieka, mające określony poziom energetyczny, informatyczny i inteligencji maszynowej. Pedipulator z siłownikami Manipulator z siłownikami Informacja wewnętrzna Komputer Otoczenie Zadanie Schemat blokowy robota.

4 Wstęp Spotkać można wiele definicji robota, każda z nich jest mniej lub bardziej szczegółowa. Definicja wg normy ISO ITR 8373 jest następująca: manipulacyjny robot przemysłowy jest automatycznie sterowaną, programowaną, wielozadaniową maszyną manipulacyjną o wielu stopniach swobody, posiadającą własności manipulacyjne lub lokomocyjne, stacjonarną lub mobilną. Klasyfikacja manipulatorów: Klasyfikację robotów przemysłowych można prowadzić na podstawie różnych, podanych dalej kategorii. Roboty przemysłowe można klasyfikować, biorąc pod uwagę zasadnicze cechy budowy, rodzaj sterowania lub inne kryteria podziału np. dokładność pozycjonowania, mobilność. Poniżej przedstawiono przykładowe klasyfikacje robotów.

5 Wstęp Klasyfikacja robotów ze względu na sterowanie - Robot sekwencyjny - Robot realizujący zadane trajektorie - Robot adaptacyjny Klasyfikacja robotów ze względu na budowę jednostki kinematycznej - monolityczne -modułowe - pseudomodułowe

6 Klasyfikacja robotów ze względu na rodzaj napędu

7 Wstęp Klasyfikacja robotów ze względu na strukturę kinematyczną i jej budowę

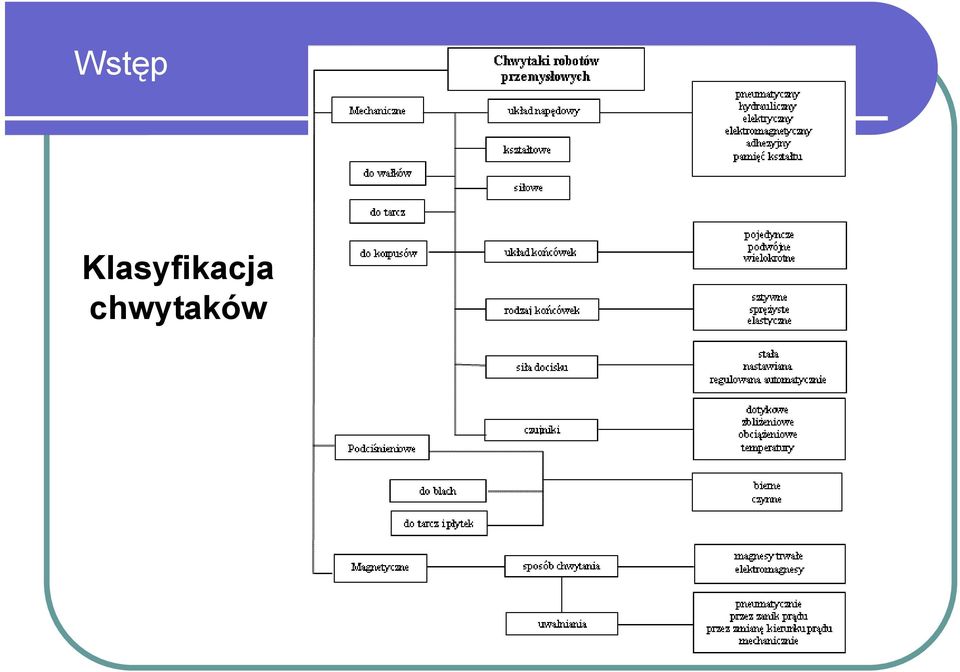
8 Wstęp Klasyfikacja chwytaków
9 Wstęp Przykładowa budowa i sposób przeniesienia napędu chwytaków: Sposoby realizacji napędu: a) dźwigniowy, b) klinowy, c) jarzmowy, d) zębaty, e) cięgnowy (łańcuchowy).
 jarzmowy, d) zębaty, e)")
10 Modelowanie robota Modelowanie robota w programie Catia Po doborze elementów robota i wybraniu powyższej konstrukcji rozpoczęto modelowanie w programie Catia. W pierwszej kolejności przystąpiono do odwzorowania poszczególnych elementów tj. silników, przekładni, łożysk, kół, profilu ramion. Następnym krokiem było zamodelowanie platformy mobilnej wraz z potrzebnymi elementami do zamocowania kół, przekładni i silników W kolejnym etapie zamodelowano mechanizm obrotnicy i potrzebne elementy mocujące i dołączono do modelu platformy mobilnej.

11 Modelowanie robota W dalszym procesie stworzono ramiona robota wraz przegubami łączącymi, w których zamocowano silniki i przekładnie napędzające poszczególne ramiona. Mechanizm ten dołączono do modelu platformy mobilnej wraz z obrotnicą. Ostatnim krokiem było zamodelowanie chwytaka i połączenie go z wcześniejszym modelem, po czym uzyskano efekt końcowy tj. model całego robota.

12 Modelowanie robota Platforma mobilna (widok z boku).

13 Modelowanie robota Platforma mobilna (widok z dołu)

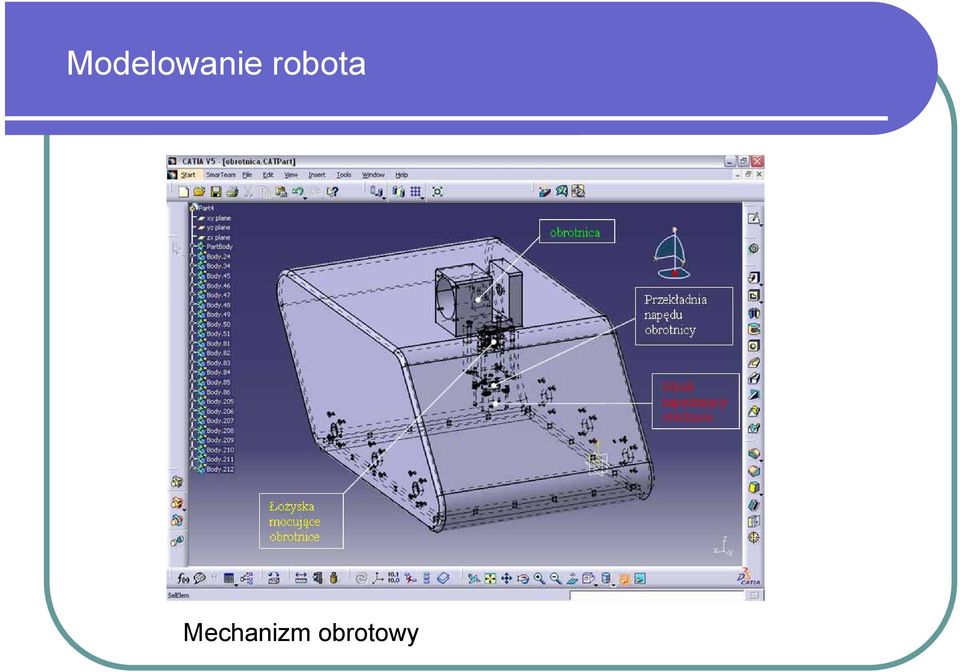
14 Modelowanie robota Mechanizm obrotowy
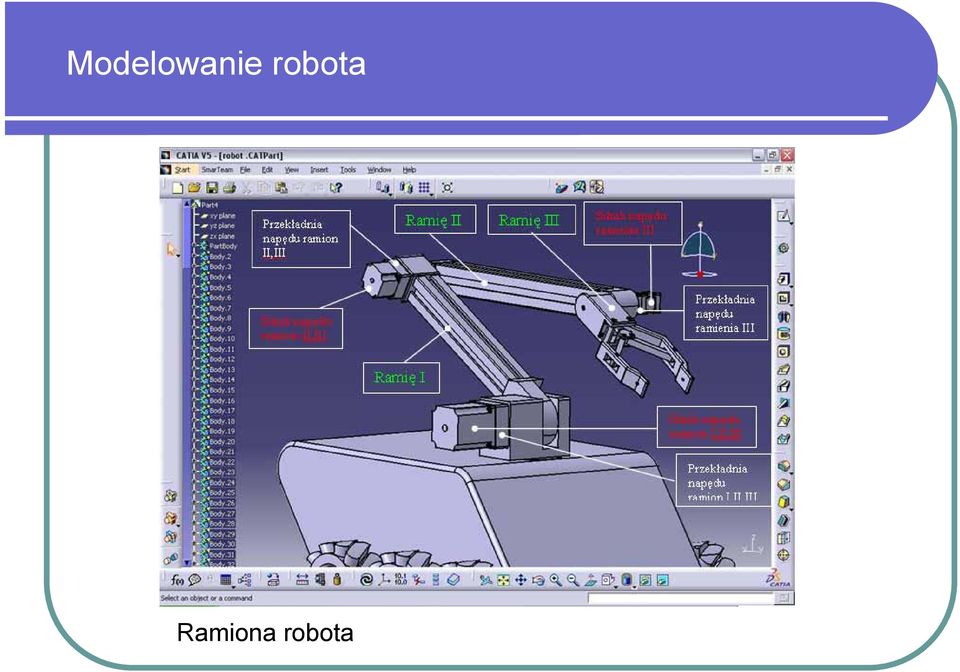
15 Modelowanie robota Ramiona robota
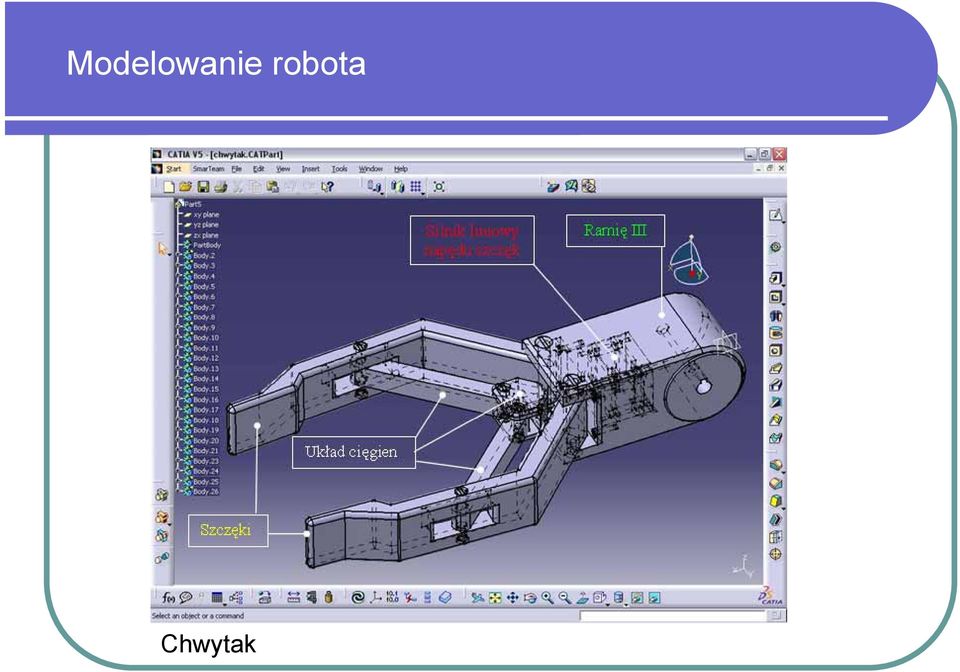
16 Modelowanie robota Chwytak
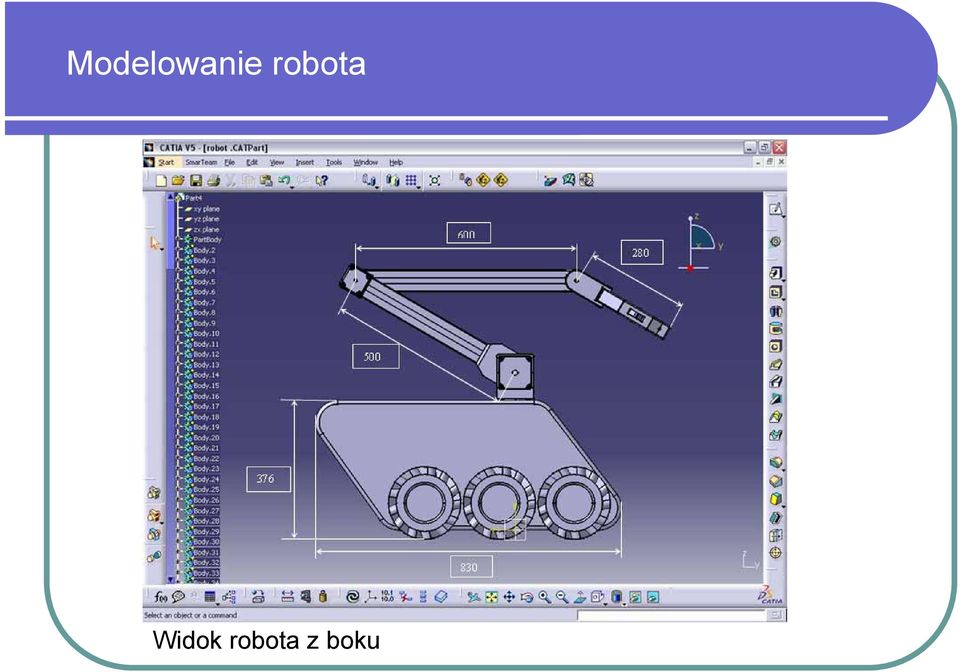
17 Modelowanie robota Widok robota z boku
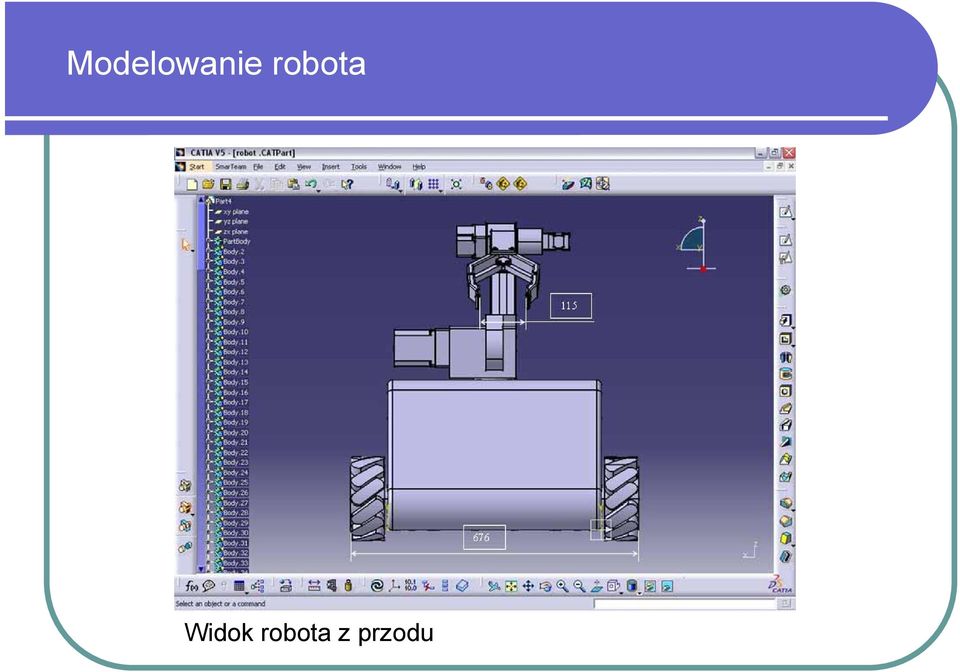
18 Modelowanie robota Widok robota z przodu
19 Modelowanie robota Modelowanie robota w programie MSC.VisualNastran Proces modelowania w programie MSC Visual Nastran, rozpocząłem od zaimportowania poszczególnych części robota z modelu wykonanego w programie Catia. Aby możliwe było zaimportowanie modelu konieczne jest przekonwertowanie plików zapisanych w postaci *.CATPart na *.stp; co umożliwił to powyższy program. Stworzyłem model platformy mobilnej, i kolejno dołączałem poszczególne elementy wraz z napędami tj. obrotnicę, ramiona, w ostatniej fazie chwytak. Przedstawiają to poniższe rysunki.

20 Modelowanie robota Platforma mobilna z obrotnicą

21 Modelowanie robota Platforma mobilna z obrotnicą i ramionami
22 Modelowanie robota Kompletny model robota
23 Analiza kinematyki W procesie analizy kinematyki w programie MSC. Visual Nastran postanowiłem sprawdzić poprawność działania mechanizmu, a także czy doboru poszczególnych elementów napędzających tj. przekładni i silników jest odpowiedni. Do analizy przyjęto następujące wielkości parametrów: -Prędkość obrotowa napędów 45 [deg/s] -Siła obciążająca robota 30[N] - Współczynnik tarcia między podłożem a układem jezdnym robota 1,5
24 Analiza kinematyki Ruch, w którym przeprowadzono analizy
25 Analiza kinematyki Analiza platformy mobilnej
26 Analiza kinematyki Analiza napędu obrotnicy
27 Analiza kinematyki Analiza napędu ramion I, II i III
28 Analiza kinematyki Analiza napędu ramion II i III
29 Analiza kinematyki Analiza napędu ramienia III
30 Analiza kinematyki Analiza chwytaka
31 Analiza kinematyki
32 Podsumowanie i wnioski Celem niniejszej pracy było zaprojektowanie robota mobilnego, oraz analiza kinematyki w programie MSC Visual Nastran. W procesie projektowania skorzystano z programu Catia, w którym wykonano model rzeczywisty robota, na podstawie dostępnych na rynku elementów. Program ten jest doskonały do projektowania w przestrzeni 3D. Prostota obsługi, szybkość tworzenia elementów 3D, łatwość wprowadzania modyfikacji spowodowała, że to w nim zaprojektowano robota. Kolejnym krokiem było zaimportowanie modelu wykonanego w Cati do programu MSC Visual Nastran.
33 Podsumowanie i wnioski Program po głębszym poznaniu umożliwia szczegółową analizę skomplikowanych mechanizmów. Można w nim tworzyć także proste model 3D, lecz do budowy złożonych konstrukcji trzeba skorzystać z osobnego środowiska CAD. Mimo tego import modeli z innych programów i sposób łączenia w jeden spójny mechanizm nie jest trudny. Proces analizy, łatwość zmiany parametrów oraz przejrzysta forma przedstawiania wyników jest jego dużym atutem. W programie tym przeprowadzono analizy sił i momentów działających na poszczególne napędy robota. Wykazano dzięki temu czy dobrany napęd zapewnia warunki poprawnego działania konstrukcji.
34 Podsumowanie i wnioski Pozwoliło to także stwierdzić czy etap projektowania teoretycznego pokrywa się z rzeczywistością. W większości przypadków wyniki analiz wykazały poprawność procesu projektowania teoretycznego. Dzięki tej analizie można wykazać poprawność działania konstrukcji, co pozwala na wyeliminowanie błędów już w procesie projektowania. Oba środowiska tj. Catia i MSC Visual Nastran stają się strategicznym oprogramowaniem w procesie projektowania w biurach konstrukcyjnych. W niniejszej pracy zostały przedstawione różne analizy, które ukazują wykorzystanie w praktyce powyższego oprogramowania i zarazem ich szerokie zalety.
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Politechnika Śląska. Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki. Praca dyplomowa inżynierska. Wydział Mechaniczny Technologiczny
 Politechnika Śląska Wydział Mechaniczny Technologiczny Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki Praca dyplomowa inżynierska Temat pracy Symulacja komputerowa działania hamulca tarczowego
Politechnika Śląska Wydział Mechaniczny Technologiczny Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki Praca dyplomowa inżynierska Temat pracy Symulacja komputerowa działania hamulca tarczowego
Rok akademicki: 2015/2016 Kod: RME s Punkty ECTS: 12. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Kiść robota. Rys. 1. Miejsce zabudowy chwytaka w robocie IRb-6.
 Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. kiści. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia
Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. kiści. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia
Roboty przemysłowe. Wprowadzenie
 Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Rok akademicki: 2013/2014 Kod: RAR s Punkty ECTS: 5. Poziom studiów: Studia I stopnia Forma i tryb studiów: -
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Laboratorium z Napęd Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Podstawy robotyki wykład I. Wprowadzenie Robot i jego historia
 Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
PRZEKŁADNIE ZĘBATE. Przekł. o osiach stałych. Przekładnie obiegowe. Planetarne: W=1 Różnicowe i sumujące: W>1
 PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces.
 AKADEMIA HUMANISTYCZNO-EKONOMICZNA W ŁODZI otwiera NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces. Zachęcamy do studiowania na 3.5 - letnich inżynierskich studiach stacjonarnych
AKADEMIA HUMANISTYCZNO-EKONOMICZNA W ŁODZI otwiera NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces. Zachęcamy do studiowania na 3.5 - letnich inżynierskich studiach stacjonarnych
Research & Development. Zespół R&D
 Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń
 Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń inż. Paweł Stęczniewski Promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 22.11.2017 inż.
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń inż. Paweł Stęczniewski Promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 22.11.2017 inż.
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
PROJEKT TECHNICZNY MECHANIZMU CHWYTAKA TYPU P-(O-O-O)
") PROJEKT TECHNICZNY MECHANIZMU CHWYTAKA TYPU P-(O-O-O) ZADANIE PROJEKTOWE: Zaprojektować chwytak do manipulatora przemysłowego wg zadanego schematu kinematycznego spełniający następujące wymagania: a) w
PROJEKT TECHNICZNY MECHANIZMU CHWYTAKA TYPU P-(O-O-O) ZADANIE PROJEKTOWE: Zaprojektować chwytak do manipulatora przemysłowego wg zadanego schematu kinematycznego spełniający następujące wymagania: a) w
Roboty przemysłowe. Cz. II
 Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH CATIA I MATLAB MODEL OF SERIAL MANIPULATOR IN CATIA AND MATLAB
 Kocurek Łukasz, mgr inż. email: kocurek.lukasz@gmail.com Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH
Kocurek Łukasz, mgr inż. email: kocurek.lukasz@gmail.com Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH
T13 Modelowanie zautomatyzowanych procesów wytwórczych, programowanie maszyn CNC
 T13 Modelowanie zautomatyzowanych procesów wytwórczych, programowanie maszyn CNC 1. Wstęp Wg normy ISO ITR 8373, robot przemysłowy jest automatycznie sterowaną, programowalną, wielozadaniową maszyną manipulacyjną
T13 Modelowanie zautomatyzowanych procesów wytwórczych, programowanie maszyn CNC 1. Wstęp Wg normy ISO ITR 8373, robot przemysłowy jest automatycznie sterowaną, programowalną, wielozadaniową maszyną manipulacyjną
PROPOZYCJA PRZEDMIOTÓW WYBIERALNYCH W SEMESTRZE III DLA STUDENTÓW STUDIÓW STACJONARNYCH (CYWILNYCH) nabór 2007 Kierunek MECHANIKA I BUDOWA MASZYN
 nabór 2007 Kierunek MECHANIKA I BUDOWA MASZYN") PROPOZYCJA PRZEDMIOTÓW WYBIERALNYCH W SEMESTRZE III DLA STUDENTÓW STUDIÓW STACJONARNYCH (CYWILNYCH) nabór 2007 Kierunek MECHANIKA I BUDOWA MASZYN 2 III SEMESTR - nabór 2007 ogółem godz. ECTS wykł. ćwicz.
PROPOZYCJA PRZEDMIOTÓW WYBIERALNYCH W SEMESTRZE III DLA STUDENTÓW STUDIÓW STACJONARNYCH (CYWILNYCH) nabór 2007 Kierunek MECHANIKA I BUDOWA MASZYN 2 III SEMESTR - nabór 2007 ogółem godz. ECTS wykł. ćwicz.
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY PROJEKT DYPLOMOWY INŻYNIERSKI
 Forma studiów: stacjonarne Kierunek studiów: ZiIP Katedra: Technologii Maszyn i Automatyzacji Produkcji Projekt systemu modułowych separatorów przedmiotów dla docierarek jednotarczowych 1. Studia literatury
Forma studiów: stacjonarne Kierunek studiów: ZiIP Katedra: Technologii Maszyn i Automatyzacji Produkcji Projekt systemu modułowych separatorów przedmiotów dla docierarek jednotarczowych 1. Studia literatury
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARi/17/Z Automatyczny mini wojownik. projektowania urządzeń automatycznych opartych
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARi/17/Z Automatyczny mini wojownik. projektowania urządzeń automatycznych opartych
Tematy prac dyplomowych magisterskich, realizacja semestr: letni 2018 kierunek AiR
 Tematy prac dyplomowych magisterskich, realizacja semestr: letni 2018 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARm/18/L Model CAD i MES jelit człowieka Opracowanie modelu CAD 3D jelit dr inż.
Tematy prac dyplomowych magisterskich, realizacja semestr: letni 2018 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARm/18/L Model CAD i MES jelit człowieka Opracowanie modelu CAD 3D jelit dr inż.
Zastosowania Robotów Mobilnych
 Zastosowania Robotów Mobilnych Temat: Zapoznanie ze środowiskiem Microsoft Robotics Developer Studio na przykładzie prostych problemów nawigacji. 1) Wstęp: Microsoft Robotics Developer Studio jest popularnym
Zastosowania Robotów Mobilnych Temat: Zapoznanie ze środowiskiem Microsoft Robotics Developer Studio na przykładzie prostych problemów nawigacji. 1) Wstęp: Microsoft Robotics Developer Studio jest popularnym
MOBILNE STANOWISKO DO BADAŃ DYNAMIKI POJAZDÓW
 MOBILNE STANOWISKO DO BADAŃ DYNAMIKI POJAZDÓW ADAM GOŁASZEWSKI 1, TOMASZ SZYDŁOWSKI 2 Politechnika Łódzka Streszczenie Badania dynamiki ruchu pojazdów wpływają w istotny sposób na rozwój ogólnie rozumianej
MOBILNE STANOWISKO DO BADAŃ DYNAMIKI POJAZDÓW ADAM GOŁASZEWSKI 1, TOMASZ SZYDŁOWSKI 2 Politechnika Łódzka Streszczenie Badania dynamiki ruchu pojazdów wpływają w istotny sposób na rozwój ogólnie rozumianej
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: KINEMATYKA I DYNAMIKA MANIPULATORÓW I ROBOTÓW Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
Nazwa przedmiotu: KINEMATYKA I DYNAMIKA MANIPULATORÓW I ROBOTÓW Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
Tematy prac dyplomowych magisterskich realizacja semestr Letni 2017 kierunek AiR
 Tematy prac dyplomowych magisterskich realizacja semestr Letni 2017 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARm/17/L Automatyzacja układania płytek podłogowych Zarezerwowany: 2/I8/ARm/17/L Moduł
Tematy prac dyplomowych magisterskich realizacja semestr Letni 2017 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARm/17/L Automatyzacja układania płytek podłogowych Zarezerwowany: 2/I8/ARm/17/L Moduł
Efekty kształcenia na kierunku AiR drugiego stopnia - Wiedza Wydziału Elektrotechniki, Automatyki i Informatyki Politechniki Opolskiej
 Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Komputerowe wspomaganie projektowania- CAT-01
 Komputerowe wspomaganie projektowania- CAT-01 Celem szkolenia jest praktyczne zapoznanie uczestników z podstawami metodyki projektowania 3D w programie CATIA V5 Interfejs użytkownika Modelowanie parametryczne
Komputerowe wspomaganie projektowania- CAT-01 Celem szkolenia jest praktyczne zapoznanie uczestników z podstawami metodyki projektowania 3D w programie CATIA V5 Interfejs użytkownika Modelowanie parametryczne
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
1. Kiść. 1. Kiść 5. Podstawa 2. Przedramię 6. Przewody łączeniowe 3. Ramię 7. Szafa sterownicza 4. Kolumna obrotowa
 1. Kiść 5. Podstawa 2. Przedramię 6. Przewody łączeniowe 3. Ramię 7. Szafa sterownicza 4. Kolumna obrotowa 1. Kiść Manipulator Kr 15 jest wyposażony w kiść dla ładunku użytecznego do 15 kg. Kiść mocowana
1. Kiść 5. Podstawa 2. Przedramię 6. Przewody łączeniowe 3. Ramię 7. Szafa sterownicza 4. Kolumna obrotowa 1. Kiść Manipulator Kr 15 jest wyposażony w kiść dla ładunku użytecznego do 15 kg. Kiść mocowana
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Projektowanie systemów mechatronicznych Rodzaj przedmiotu:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Projektowanie systemów mechatronicznych Rodzaj przedmiotu:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Projektowanie systemów Rodzaj przedmiotu: Fakultatywny Kod przedmiotu: MT 1 S 0 6 40-1_1 Rok: 3 Semestr: 6 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Projektowanie systemów Rodzaj przedmiotu: Fakultatywny Kod przedmiotu: MT 1 S 0 6 40-1_1 Rok: 3 Semestr: 6 Forma studiów:
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
ROBOT PRZEMYSŁOWY W DOJU KRÓW
 Problemy Inżynierii Rolniczej nr 4/2009 Henryk Juszka, Tomasz Kapłon, Marcin Tomasik, Krystian Góra Katedra Energetyki i Automatyzacji Procesów Rolniczych Uniwersytet Rolniczy im. H. Kołłątaja w Krakowie
Problemy Inżynierii Rolniczej nr 4/2009 Henryk Juszka, Tomasz Kapłon, Marcin Tomasik, Krystian Góra Katedra Energetyki i Automatyzacji Procesów Rolniczych Uniwersytet Rolniczy im. H. Kołłątaja w Krakowie
Kinematyka robotów mobilnych
 Kinematyka robotów mobilnych Maciej Patan Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Adaptacja slajdów do wykładu Autonomous mobile robots R. Siegwart (ETH Zurich Master Course:
Kinematyka robotów mobilnych Maciej Patan Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Adaptacja slajdów do wykładu Autonomous mobile robots R. Siegwart (ETH Zurich Master Course:
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium, projekt I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium, projekt I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
DROGA ROZWOJU OD PROJEKTOWANIA 2D DO 3D Z WYKORZYSTANIEM SYSTEMÓW CAD NA POTRZEBY PRZEMYSŁU SAMOCHODOWEGO
 Marta KORDOWSKA, Andrzej KARACZUN, Wojciech MUSIAŁ DROGA ROZWOJU OD PROJEKTOWANIA 2D DO 3D Z WYKORZYSTANIEM SYSTEMÓW CAD NA POTRZEBY PRZEMYSŁU SAMOCHODOWEGO Streszczenie W artykule omówione zostały zintegrowane
Marta KORDOWSKA, Andrzej KARACZUN, Wojciech MUSIAŁ DROGA ROZWOJU OD PROJEKTOWANIA 2D DO 3D Z WYKORZYSTANIEM SYSTEMÓW CAD NA POTRZEBY PRZEMYSŁU SAMOCHODOWEGO Streszczenie W artykule omówione zostały zintegrowane
Politechnika Poznańska Wydział Maszyn Roboczych i Transportu
 Politechnika Poznańska Wydział Maszyn Roboczych i Transportu Szymon Grabański KONCEPCJA I OBLICZENIA WYTRZYMAŁOŚCIOWE METODĄ ELEMENTÓW SKOŃCZONYCH DŹWIGU PLATFORMOWEGO DLA OSÓB Z OGRANICZONĄ ZDOLNOŚCIĄ
Politechnika Poznańska Wydział Maszyn Roboczych i Transportu Szymon Grabański KONCEPCJA I OBLICZENIA WYTRZYMAŁOŚCIOWE METODĄ ELEMENTÓW SKOŃCZONYCH DŹWIGU PLATFORMOWEGO DLA OSÓB Z OGRANICZONĄ ZDOLNOŚCIĄ
WPŁYW USTALENIA I MOCOWANIA KORPUSÓW PRZEKŁADNI TECHNOLOGICZNIE PODOBNYCH NA KSZTAŁT OTWORÓW POD ŁOŻYSKA
 WPŁYW USTALENIA I MOCOWANIA KORPUSÓW PRZEKŁADNI TECHNOLOGICZNIE PODOBNYCH NA KSZTAŁT OTWORÓW POD ŁOŻYSKA Ryszard WOJCIK 1, Norbert KEPCZAK 1 1. WPROWADZENIE Procesy symulacyjne pozwalają prześledzić zachowanie
WPŁYW USTALENIA I MOCOWANIA KORPUSÓW PRZEKŁADNI TECHNOLOGICZNIE PODOBNYCH NA KSZTAŁT OTWORÓW POD ŁOŻYSKA Ryszard WOJCIK 1, Norbert KEPCZAK 1 1. WPROWADZENIE Procesy symulacyjne pozwalają prześledzić zachowanie
Laboratorium Napędu Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
Zastosowanie silników krokowych jako napęd robota mobilnego
 Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Tematy prac dyplomowych magisterskich kierunek MiBM
 Tematy prac dyplomowych magisterskich kierunek MiBM Nr pracy Temat Cel Zakres Prowadzący 001/I8/Mgr/2013 Badanie sił skrawania i chropowatości powierzchni podczas obróbki stopów niklu 002/I8/ Mgr /2013
Tematy prac dyplomowych magisterskich kierunek MiBM Nr pracy Temat Cel Zakres Prowadzący 001/I8/Mgr/2013 Badanie sił skrawania i chropowatości powierzchni podczas obróbki stopów niklu 002/I8/ Mgr /2013
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
GM System przedstawia: Projektowanie części maszyn w systemie CAD SOLID EDGE na wybranych przykładach
 GM System przedstawia: Projektowanie części maszyn w systemie CAD SOLID EDGE System SOLID EDGE oferuje rozwiązania umożliwiające szybkie i poprawne projektowanie CAD 3D/2D w różnych branżach inżynierskich.
GM System przedstawia: Projektowanie części maszyn w systemie CAD SOLID EDGE System SOLID EDGE oferuje rozwiązania umożliwiające szybkie i poprawne projektowanie CAD 3D/2D w różnych branżach inżynierskich.
Projekt konstrukcyjny i wykonanie prototypu mechanizmu Jansena. The construction project and making the prototype of the Jansen mechanism
 inż. Karol Sieczka, email : krlsieczka@gmail.com dr inż. Piotr Skawiński, email : psk@simr.pw.edu.pl Politechnika Warszawska, Wydział Samochodów i Maszyn Roboczych Projekt konstrukcyjny i wykonanie prototypu
inż. Karol Sieczka, email : krlsieczka@gmail.com dr inż. Piotr Skawiński, email : psk@simr.pw.edu.pl Politechnika Warszawska, Wydział Samochodów i Maszyn Roboczych Projekt konstrukcyjny i wykonanie prototypu
Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady
 Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Mechanizacja, Automatyzacja, Robotyzacja
Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Mechanizacja, Automatyzacja, Robotyzacja
SPECYFIKACJA TECHNICZNO-HANDLOWA OPROGRAMOWANIA DO PRAC KONSTRUKCYJNYCH 3D (razem 6 licencji)
") ZAŁĄCZNIK NR 1 SPECYFIKACJA TECHNICZNO-HANDLOWA OPROGRAMOWANIA DO PRAC KONSTRUKCYJNYCH 3D (razem 6 licencji) I. Dwa zestawy oprogramowania (2 licencje (PODAĆ NAZWĘ PRODUCENTA I NAZWĘ PAKIETU 1. Parametryczne
ZAŁĄCZNIK NR 1 SPECYFIKACJA TECHNICZNO-HANDLOWA OPROGRAMOWANIA DO PRAC KONSTRUKCYJNYCH 3D (razem 6 licencji) I. Dwa zestawy oprogramowania (2 licencje (PODAĆ NAZWĘ PRODUCENTA I NAZWĘ PAKIETU 1. Parametryczne
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia. Podstawy konstrukcji maszyn II
 modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia. Podstawy konstrukcji maszyn II") Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia Przedmiot: Podstawy konstrukcji maszyn II Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MBM S 0 5 52-0_ Rok: III Semestr:
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia Przedmiot: Podstawy konstrukcji maszyn II Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MBM S 0 5 52-0_ Rok: III Semestr:
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
ROBOTY AUTOMATYZACJA PRODUKCJI
 ROBOTY AUTOMATYZACJA PRODUKCJI Roboty najnowszej generacji 02 Dane techniczne oraz więcej informacji na www.dopak.pl ROBOTY NAJNOWSZEJ GENERACJI PICKERSPX10 Robot przeznaczony do odbioru wlewków jak również
ROBOTY AUTOMATYZACJA PRODUKCJI Roboty najnowszej generacji 02 Dane techniczne oraz więcej informacji na www.dopak.pl ROBOTY NAJNOWSZEJ GENERACJI PICKERSPX10 Robot przeznaczony do odbioru wlewków jak również
MODUŁ 3. WYMAGANIA EGZAMINACYJNE Z PRZYKŁADAMI ZADAŃ
 MODUŁ 3. WYMAGANIA EGZAMINACYJNE Z PRZYKŁADAMI ZADAŃ 2. Przykład zadania do części praktycznej egzaminu dla wybranych umiejętności z kwalifikacji M.44. Organizacja i nadzorowanie procesów produkcji maszyn
MODUŁ 3. WYMAGANIA EGZAMINACYJNE Z PRZYKŁADAMI ZADAŃ 2. Przykład zadania do części praktycznej egzaminu dla wybranych umiejętności z kwalifikacji M.44. Organizacja i nadzorowanie procesów produkcji maszyn
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI. Robot do pokrycia powierzchni terenu
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
PL 213839 B1. Manipulator równoległy trójramienny o zamkniętym łańcuchu kinematycznym typu Delta, o trzech stopniach swobody
 PL 213839 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213839 (13) B1 (21) Numer zgłoszenia: 394237 (51) Int.Cl. B25J 18/04 (2006.01) B25J 9/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 213839 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213839 (13) B1 (21) Numer zgłoszenia: 394237 (51) Int.Cl. B25J 18/04 (2006.01) B25J 9/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Podstawy robotyki - opis przedmiotu
 Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
PL B1. AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE, Kraków, PL BUP 14/18
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 230767 (13) B1 (21) Numer zgłoszenia: 420034 (51) Int.Cl. B65G 7/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 29.12.2016
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 230767 (13) B1 (21) Numer zgłoszenia: 420034 (51) Int.Cl. B65G 7/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 29.12.2016
Kierunkowe efekty kształcenia wraz z odniesieniem do efektów obszarowych. Energetyka studia I stopnia
 Załącznik 3 do uchwały nr /d/05/2012 Wydział Mechaniczny PK Kierunkowe efekty kształcenia wraz z odniesieniem do efektów Kierunek: Energetyka studia I stopnia Lista efektów z odniesieniem do efektów Kierunek:
Załącznik 3 do uchwały nr /d/05/2012 Wydział Mechaniczny PK Kierunkowe efekty kształcenia wraz z odniesieniem do efektów Kierunek: Energetyka studia I stopnia Lista efektów z odniesieniem do efektów Kierunek:
znormalizowanych jednostek posuwowych.
 Tematy prac dyplomowych magisterskich realizacja semestr letni 2014/2015 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARm/15/L Projekt jednostki Projekt jednostki wiertarskiej sterowanej w Rozeznanie
Tematy prac dyplomowych magisterskich realizacja semestr letni 2014/2015 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARm/15/L Projekt jednostki Projekt jednostki wiertarskiej sterowanej w Rozeznanie
Egzamin 1 Strona 1. Egzamin - AR egz Zad 1. Rozwiązanie: Zad. 2. Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same
 Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Deski. Butelki. Bloczki. Zgrzewki Kanistry Szyby
 manipulatory pneumatyczne manipulatory podciśnieniowe wciągniki wózki manipulacyjne Deski Bloczki Butelki Zgrzewki Kanistry Szyby Wciagniki Wciągniki elektryczne (linowe i łańcuchowe) znajdują swoje
manipulatory pneumatyczne manipulatory podciśnieniowe wciągniki wózki manipulacyjne Deski Bloczki Butelki Zgrzewki Kanistry Szyby Wciagniki Wciągniki elektryczne (linowe i łańcuchowe) znajdują swoje
Spis treści Przedmowa
 Spis treści Przedmowa 1. Wprowadzenie do problematyki konstruowania - Marek Dietrich (p. 1.1, 1.2), Włodzimierz Ozimowski (p. 1.3 -i-1.7), Jacek Stupnicki (p. l.8) 1.1. Proces konstruowania 1.2. Kryteria
Spis treści Przedmowa 1. Wprowadzenie do problematyki konstruowania - Marek Dietrich (p. 1.1, 1.2), Włodzimierz Ozimowski (p. 1.3 -i-1.7), Jacek Stupnicki (p. l.8) 1.1. Proces konstruowania 1.2. Kryteria
PL B1. Mechanizm pedipulatora do ustawiania pozycji modułu napędowego, zwłaszcza robota mobilnego
 PL 223875 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223875 (13) B1 (21) Numer zgłoszenia: 406656 (51) Int.Cl. F16H 1/36 (2006.01) F16H 3/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223875 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223875 (13) B1 (21) Numer zgłoszenia: 406656 (51) Int.Cl. F16H 1/36 (2006.01) F16H 3/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY PROJEKT DYPLOMOWY INŻYNIERSKI
 Forma studiów: stacjonarne Kierunek studiów: ZiIP Specjalność/Profil: Zarządzanie Jakością i Informatyczne Systemy Produkcji Katedra: Technologii Maszyn i Automatyzacji Produkcji Badania termowizyjne nagrzewania
Forma studiów: stacjonarne Kierunek studiów: ZiIP Specjalność/Profil: Zarządzanie Jakością i Informatyczne Systemy Produkcji Katedra: Technologii Maszyn i Automatyzacji Produkcji Badania termowizyjne nagrzewania
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
TEORIA MASZYN MECHANIZMÓW ĆWICZENIA LABORATORYJNE Badanie struktury modeli mechanizmów w laboratorium.
 MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 1 str. 1 MiBM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN MECHANIZMÓW
MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 1 str. 1 MiBM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN MECHANIZMÓW
R 1. Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych
 Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego inżynierskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Sprzętowe i programowe składniki sieci komputerowych. 2. Routing w sieciach komputerowych. 3. Siedmiowarstwowy model
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Sprzętowe i programowe składniki sieci komputerowych. 2. Routing w sieciach komputerowych. 3. Siedmiowarstwowy model
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Narzędzie informatyczne do modelowania, zarządzania i dokumentowania procesów systemu zarządzania jakością
 Narzędzie informatyczne do modelowania, zarządzania i dokumentowania procesów systemu zarządzania jakością ProMoS Każde działanie można ująć w formie procesu i odpowiednio doskonalić. (W.E. Deming) ProMoS
Narzędzie informatyczne do modelowania, zarządzania i dokumentowania procesów systemu zarządzania jakością ProMoS Każde działanie można ująć w formie procesu i odpowiednio doskonalić. (W.E. Deming) ProMoS
MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOSIM 200
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-15 MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOSIM
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-15 MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOSIM
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski mgr inż. Stanisław Iszora mgr inż. Włodzimierz Sakwiński dr inż.
 Katedra Systemów Automatyki Katedra Systemów Automatyki prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski dr inż. Paweł Raczyński dr inż. Stefan Sieklicki dr inż. Krzysztof Cisowski mgr
Katedra Systemów Automatyki Katedra Systemów Automatyki prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski dr inż. Paweł Raczyński dr inż. Stefan Sieklicki dr inż. Krzysztof Cisowski mgr
Teoria sprężystości i plastyczności 1W E (6 ECTS) Modelowanie i symulacja ruchu maszyn i mechanizmów 1L (3 ECTS)
 Modelowanie i symulacja ruchu maszyn i mechanizmów 1L (3 ECTS)") Kierunek : MECHANIKA I BUDOWA MASZYN. Studia niestacjonarne II-go stopnia, specjalność KOMPUTEROWE PROJEKTOWANIE MASZYN I URZĄDZEŃ godzin Analiza wytrzymałościowa elementów konstrukcji W E, C ( ECTS) Symulacje
Kierunek : MECHANIKA I BUDOWA MASZYN. Studia niestacjonarne II-go stopnia, specjalność KOMPUTEROWE PROJEKTOWANIE MASZYN I URZĄDZEŃ godzin Analiza wytrzymałościowa elementów konstrukcji W E, C ( ECTS) Symulacje
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
005/I8/ARi/13/Z. 002/I8/ARi/13/Z
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2013/2014 kierunek AiR Lp. Temat Cel Zakres Prowadzący 001/I8/ARi/13/Z Zaprojektowanie magazynów wraz z magazynów mechanizmami wydającymi
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2013/2014 kierunek AiR Lp. Temat Cel Zakres Prowadzący 001/I8/ARi/13/Z Zaprojektowanie magazynów wraz z magazynów mechanizmami wydającymi
Projektowanie systemów zrobotyzowanych
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 4 Temat: Programowanie trajektorii ruchu Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin Wiśniewski
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 4 Temat: Programowanie trajektorii ruchu Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin Wiśniewski
Badanie powtarzalności pozycjonowania robota IRp-6
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie powtarzalności pozycjonowania robota IRp-6 opracował: dr inż. Paweł Cegielski Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Automatyzacja
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie powtarzalności pozycjonowania robota IRp-6 opracował: dr inż. Paweł Cegielski Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Automatyzacja
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
MOBOT RoboSnake. Moduł wieloczłonowego robota
 MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy konstrukcji maszyn Rodzaj przedmiotu: obowiązkowy Kod przedmiotu:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy konstrukcji maszyn Rodzaj przedmiotu: obowiązkowy Kod przedmiotu:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy konstrukcji maszyn Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT N 0 4 6-0_ Rok: II Semestr: 4 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy konstrukcji maszyn Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT N 0 4 6-0_ Rok: II Semestr: 4 Forma studiów:
IRB PODSUMOWANIE:
 IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
Walce do zwijania blach DOKUMENTACJA TECHNICZNO RUCHOWA
 Walce do zwijania blach DOKUMENTACJA TECHNICZNO Stron 10 Strona 1 Spis treści I. Rysunek poglądowy maszyny 2 II. Podstawowe dane techniczne 4 III. Konstrukcja i przeznaczenie 4 IV. Układ napędowy 8 V.
Walce do zwijania blach DOKUMENTACJA TECHNICZNO Stron 10 Strona 1 Spis treści I. Rysunek poglądowy maszyny 2 II. Podstawowe dane techniczne 4 III. Konstrukcja i przeznaczenie 4 IV. Układ napędowy 8 V.
Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia
 Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia 1. Wymiń warunki równowagi dowolnego płaskiego układu sił. 2. Co można wyznaczyć w statycznej próbie rozciągani. 3.
Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia 1. Wymiń warunki równowagi dowolnego płaskiego układu sił. 2. Co można wyznaczyć w statycznej próbie rozciągani. 3.
Podstawy Konstrukcji Maszyn II Machine Desing. podstawowy obowiązkowy polski V
 Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Podstawy
Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Podstawy