Iloczyn skalarny, wektorowy, mieszany. Ortogonalność wektorów. Metoda ortogonalizacji Grama-Schmidta. Małgorzata Kowaluk semestr X
|
|
|
- Urszula Nowak
- 4 lat temu
- Przeglądów:
Transkrypt
1 Iloczyn skalarny, wektorowy, mieszany. Ortogonalność wektorów. Metoda ortogonalizacji Grama-Schmidta. Małgorzata Kowaluk semestr X
2 ILOCZYN SKALARNY Iloczyn skalarny operator na przestrzeni liniowej przypisujący dwóm argumentom (wektorom) tej przestrzeni rzeczywistą wartość skalarną. E n n-wymiarowa przestrzeń euklidesowa. Iloczyn skalarny dwóch wektorów a = (a, a 2,, a n ) i b = (b, b 2,, b n ) w przestrzeni E n dany jest wzorem: n a b = a i b i = a b + a 2 b a n b n. i= 2
3 W przestrzeni euklidesowej istnieje zależność między iloczynem skalarnym a długością i kątem. Niech a, b będą dowolnymi wektorami w R 3. Iloczyn skalarny wektorów a i b określamy wzorem: a b = a b cosφ, gdzie φ jest kątem między wektorami a i b. 3
4 Interpretacja geometryczna iloczynu skalarnego. Jeżeli kąt między wektorami oznaczymy przez α, a operację mnożenia skalarnego przez a b, to otrzymamy: a b = a b cosα. Iloczyn skalarny możemy przedstawić jako iloczyn rzutu jednego wektora na kierunek drugiego i modułu drugiego. a b = a b cosα = b a cosα = arz a b = brz b a 4
5 Własności iloczynu skalarnego: a b = b a (przemienność), m a b = ma b = a (mb) (łączność), a (b + c) = a b + a c (rozdzielność względem dodawania wektorów), a (rb + c) = r(a b) + (a c) (dwuliniowość), a a 0 (nieujemność) niezerowe wektory a i b są prostopadłe (ortogonalne), wtedy i tylko wtedy gdy a b = 0, a b a b (równość jest możliwa tylko wtedy, gdy a i b są równoległe), a a = a 2 5
6 Przykłady. Przykład. a = 2,4,6, b = [,3,5] a b = = = 44 Przykład 2. Sprawdzić, czy funkcja x, y = 3x y 2x y 2 2x 2 y + 4x 2 y 2 jest iloczynem skalarnym w przestrzeni R 3. ) x, y = 3x y 2x y 2 2x 2 y + 4x 2 y 2 = 3y x 2y x 2 2y 2 x + 4y 2 x 2 = y, x 2) x + y, z = 3 x + y z 2 x + y z 2 2 x 2 + y 2 z + 4 x 2 + y 2 z 2 = = 3x z 2x z 2 2x 2 z + 4x 2 z 2 + 3y z 2y z 2 2y 2 z + 4y 2 z 2 = = x, z + (y, z ) 3) αx, y = 3(αx )y 2 αx y 2 2 αx 2 y + 4 αx 2 y 2 = = α 3x y 2x y 2 2x 2 y + 4x 2 y 2 = α x, y 4) x, x = 3x 2 4x x 2 + 4x 2 2 Δ = 32 x x, x 0 5) x, x = 0 x = 0 Δ = 0 x 2 = x = 0 x = 0 6
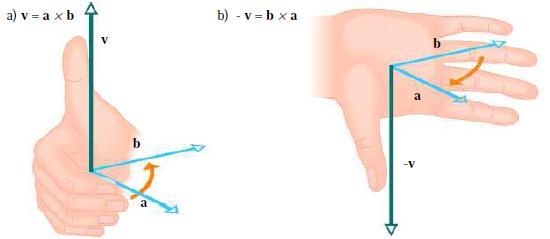
7 ILOCZYN WEKTOROWY Iloczyn wektorowy - dwuargumentowe działanie przyporządkowujące parze wektorów ze zorientowanej, trójwymiarowej przestrzeni euklidesowej wektor do nich prostopadły, tzn. normalny do płaszczyzny je zawierającej. Mnożenie wektorowe jest to operacja, której wynikiem jest nowy wektor. Iloczynem wektorowym wektorów niezerowych a i b nazywamy wektor c, taki, że: ) c = a b sin (a, b), 2) c jest wektorem prostopadłym do wektorów a i b, 3) jego zwrot jest taki, że układ wektorów a, b, c ma orientację zgodną z przyjętą orientacją przestrzeni. 7

8 Niech a = (x, y, z ), b = (x 2, y 2, z 2 ), c = (x 3, y 3, z 3 ), będą wektorami w R 3. Mówimy, że wektory a, b, c tworzą układ o orientacji zgodnej z orientacją układu współrzędnych, jeżeli x y z x 2 y 2 z 2 > 0. x 3 y 3 z 3 W przypadku, gdy podany wyznacznik jest ujemny mówimy, że orientacja układu wektorów a, b, c jest przeciwna do orientacji układu współrzędnych. Układ a, b, c nazywamy prawoskrętnym (lewoskrętnym), gdy jest on zgodny z prawoskrętnym (lewoskrętnym) układem współrzędnych. 8
9 9
10 Wzór do obliczenia iloczynu wektorowego. Niech a = (x, y, z ), b = (x 2, y 2, z 2 ) będą wektorami w R 3. Wtedy: a b = i j k x y z, x 2 y 2 z 2 gdzie i, j, k oznaczają wersory odpowiednio na osiach Ox, Oy, Oz. 0
11 Własności iloczynu wektorowego : a b = b a (antyprzemienność ), (a + b) c = a c + b c, a b a b, (α a) b = a (α b) = α (a b) a (b + c) = a b + a c, wektory a i b są równoległe wtedy i tylko wtedy gdy a b = 0.
12 Interpretacja geometryczna iloczynu wektorowego. Jeżeli kąt między wektorami oznaczymy przez α, a operację mnożenia wektorowego przez a b, to otrzymamy: a b = a b sinα. Z określenia modułu iloczynu wektorowego oraz powyższego rysunku wynika, że jest on równy polu równoległoboku zbudowanego na wektorach a i b. 2
13 Przykłady. Przykład. a = 2,3,5, b = 3,,0. Oblicz a b. Rozwiązanie: a b = Przykład 2. i j k = i j k = 5i + 5j k = [5,5, ] W przestrzeni euklidesowej R 3 dane są wektory v = [0,, ], w = [2,, 3]. Obliczyć sin (v, w). Rozwiązanie: v w = i j k = i 3 j k 0 2 = [4, 2, 2] v w = 24, v = 2, w = 4 a b a b = sinα sin v, w = = = 6 7
14 ILOCZYN MIESZANY Iloczyn mieszany trójki wektorów a, b, c to liczba, którą otrzymujemy mnożąc skalarnie iloczyn wektorowy a b przez wektor c. Iloczyn mieszany trójki wektorów a, b, c określamy wzorem: (a, b, c) = (a b) c. 4
15 Wzór do obliczania iloczynu mieszanego. 5
16 Interpretacja geometryczna iloczynu mieszanego. W interpretacji geometrycznej iloczyn mieszany jest równy liczbowo objętości równoległościanu zbudowanego na wektorach u, v i w. Przyjmijmy, że podstawa równoległościanu jest równoległobokiem rozpiętym na wektorach u, v. Objętość V tego równoległościanu jest równa iloczynowi pola P = u v jego podstawy oraz wysokości = w cos (u v, w). Z podanej interpretacji geometrycznej wynika, że gdy wektory te leżą w jednej płaszczyźnie, to iloczyn mieszany jest równy zeru. 6
17 Własności iloczynu mieszanego. Niech a, b, c, d będą wektorami w R 3 oraz niech αεr. Wtedy: (a, b, c) = ( b, c, a), (a, b, c) = ( b, a, c), (a + d, b, c) = (a, b, c) + (d, b, c), (αa, b, c) = α (a, b, c), wektory a, b, c, leżą w jednej płaszczyźnie wtedy i tylko wtedy gdy (a, b, c) = 0, (a, b, c) a b c. 7
18 Przykład. Oblicz objętość równoległościanu rozpiętego na wektorach: a = [2, 4, 5], b = [0, 2, 4], c = [3, 4, ]. Rozwiązanie: a b c = = = 0 a b c = 0 = 0 8
19 ORTOGONALNOŚĆ WEKTORÓW Ortogonalność (z gr. ortho proste, gonia kąt) uogólnienie pojęcia prostopadłości znanego z geometrii euklidesowej na abstrakcyjne przestrzenie z określonym iloczynem skalarnym czyli tzw. przestrzenie unitarne. Elementy x, y należące do tej przestrzeni są ortogonalne, jeśli x y = 0. W szczególności wektor 0 jest ortogonalny do każdego wektora. Układ elementów przestrzeni nazywa się układem ortogonalnym, jeżeli każde dwa różne jego elementy są ortogonalne. Ortonormalność ortogonalność wraz z dodanym warunkiem unormowania, tzn. wymagania, aby elementy ortogonalne miały długość jednostkową (były wersorami). 9
20 Metoda ortogonalizacji Grama-Schmidta. Ortogonalizacja Grama-Schmidta to metoda za pomocą której można przekształcić zbiór liniowo niezależnych wektorów przestrzeni w zbiór wektorów ortogonalnych. Przestrzenie liniowe, rozpinane przez zbiory przed i po ortogonalizacji są tożsame, tak więc proces może służyć do ortogonalizowania bazy. Baza przestrzeni V - dowolny uporządkowany zbiór n wektorów liniowo niezależnych n-wymiarowej przestrzeni V. Mówimy, że wektory v, v 2,, v n należące do przestrzeni liniowej V są liniowo niezależne, jeżeli dla dowolnych rzeczywistych współczynników α, α 2,, α n z warunku wynikają równości: α v + α 2 v 2 + α n v n = 0, α = α 2 =, = α n = 0. 20
21 Twierdzenie. (ortogonalizacja Grama-Schmidta) Niech {u, u 2,, u n } będzie bazą przestrzeni euklidesowej E. Wtedy układ wektorów {v, v 2,, v n } określonych wzorami jest bazą ortogonalną tej przestrzeni. 2
22 proj v u = <u,v> v - operator wektora v na wektor u <v,v> v k = u k k j = proj vj u k - {v, v 2,, v n } zbiór wektorów ortogonalnych 22
23 23
24 24
25 25
26 Przykład. Zortogonalizuj wektory u =,,, u 2 =,, 0, u 3 = [, 0, 0]w przestrzeni E 3. v = u = [,, ] v 2 = u 2 proj v u 2 proj v u 2 = < u 2, v > < v, v > v < u 2, v > =,, 0,, = 2 < v, v > =,,,, = 3 proj v u 2 = 2 3,, = [2 3, 2 3, 2 3 ] v 2 =,, 0 2 3, 2 3, 2 3 = [ 3, 3, 2 3 ] 26
27 v 3 = u 3 2 j = proj vj u 3 = u 3 proj v u 3 proj v2 u 3 proj v u 3 = < u 3, v > < v, v > v proj v2 u 3 = < u 3, v 2 > < v 2, v 2 > v 2 < u 3, v > =, 0, 0,, = < u 3, v 2 > =, 0, 0 3, 3, 2 3 = 3 < v, v > =,,,, = 3 < v 2, v 2 > = 3, 3, 2 3 3, 3, 2 3 = 2 3 proj v u 3 = 3,, = [ 3, 3, 3 ] proj v 2 u 3 = , 3, 2 3 = [ 6, 6, 3 ] v 3 =, 0, 0 3, 3, 3 [ 6, 6, 3 ] = [ 2, 2, 0] 27
28 Jeżeli iloczyn skalarny funkcji ciągłych jest określony wzorem: b f, g w = w x f x g x dx, a gdzie w(x) jest funkcją wagową, to dla zbioru funkcji liniowo niezależnych przekształcenie w zbiór funkcji ortogonalnych przebiega następująco: g 0 x = f 0 x g i x = f i x i j =0 g j x b a w t f i t g j t dt b a w t g j 2 t dt 28
29 Przykład: Znaleźć bazę ortogonalną przestrzeni euklidesowej E = R 2 [x] z iloczynem skalarnym zdefiniowanym wzorem f, g = f x g x dx, f 0 = x. Rozwiązanie: 0 Będziemy zortogonalizować bazę standardową, x, x 2 przestrzeni R 2 [x]. Wektory bazy ortogonalnej obliczamy ze wzorów: g 0, g = x t dt dt = x 2 t 2 0 = x 2, g 2 = x = x 2 t 2 dt 2 dt 3 t3 0 = x 2 x + 6 x 2 t 2 t 0 2 dt 0 t 2 x 2 4 t4 6 t3 0 2 dt = 3 t3 2 t2 + 4 t 0 = x2 3 x = 29
PODSTAWY RACHUNKU WEKTOROWEGO
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Skalar Definicja Skalar wielkość fizyczna (lub geometryczna)
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Skalar Definicja Skalar wielkość fizyczna (lub geometryczna)
GEOMETRIA ANALITYCZNA W PRZESTRZENI
 Wykład z Podstaw matematyki dla studentów Inżynierii Środowiska Wykład 13. Egzaminy I termin wtorek 31.01 14:00 Aula A Wydział Budownictwa II termin poprawkowy czwartek 9.02 14:00 Aula A Wydział Budownictwa
Wykład z Podstaw matematyki dla studentów Inżynierii Środowiska Wykład 13. Egzaminy I termin wtorek 31.01 14:00 Aula A Wydział Budownictwa II termin poprawkowy czwartek 9.02 14:00 Aula A Wydział Budownictwa
SIMR 2016/2017, Analiza 2, wykład 1, Przestrzeń wektorowa
 SIMR 06/07, Analiza, wykład, 07-0- Przestrzeń wektorowa Przestrzeń wektorowa (liniowa) - przestrzeń (zbiór) w której określone są działania (funkcje) dodawania elementów i mnożenia elementów przez liczbę
SIMR 06/07, Analiza, wykład, 07-0- Przestrzeń wektorowa Przestrzeń wektorowa (liniowa) - przestrzeń (zbiór) w której określone są działania (funkcje) dodawania elementów i mnożenia elementów przez liczbę
Iloczyn wektorowy. Autorzy: Michał Góra
 Iloczyn wektorowy Autorzy: Michał Góra 019 Iloczyn wektorowy Autor: Michał Góra DEFINICJA Definicja 1: Iloczyn wektorowy Iloczynem wektorowym wektorów v = ( v x, v y, v z ) R 3 oraz w = ( w x, w y, w z
Iloczyn wektorowy Autorzy: Michał Góra 019 Iloczyn wektorowy Autor: Michał Góra DEFINICJA Definicja 1: Iloczyn wektorowy Iloczynem wektorowym wektorów v = ( v x, v y, v z ) R 3 oraz w = ( w x, w y, w z
Zadania z algebry liniowej Iloczyn skalarny, przestrzenie euklidesowe
 Zadania z algebry liniowej Iloczyn skalarny, przestrzenie euklidesowe Definicja 1 (Iloczyn skalarny). Niech V będzie rzeczywistą przestrzenią liniową. Iloczynem skalarnym w przestrzeni V nazywamy funkcję
Zadania z algebry liniowej Iloczyn skalarny, przestrzenie euklidesowe Definicja 1 (Iloczyn skalarny). Niech V będzie rzeczywistą przestrzenią liniową. Iloczynem skalarnym w przestrzeni V nazywamy funkcję
Geometria Lista 0 Zadanie 1
 Geometria Lista 0 Zadanie 1. Wyznaczyć wzór na pole równoległoboku rozpiętego na wektorach u, v: (a) nie odwołując się do współrzędnych tych wektorów; (b) odwołując się do współrzędnych względem odpowiednio
Geometria Lista 0 Zadanie 1. Wyznaczyć wzór na pole równoległoboku rozpiętego na wektorach u, v: (a) nie odwołując się do współrzędnych tych wektorów; (b) odwołując się do współrzędnych względem odpowiednio
Elementy geometrii analitycznej w R 3
 Rozdział 12 Elementy geometrii analitycznej w R 3 Elementy trójwymiarowej przestrzeni rzeczywistej R 3 = {(x,y,z) : x,y,z R} możemy interpretować co najmniej na trzy sposoby, tzn. jako: zbiór punktów (x,
Rozdział 12 Elementy geometrii analitycznej w R 3 Elementy trójwymiarowej przestrzeni rzeczywistej R 3 = {(x,y,z) : x,y,z R} możemy interpretować co najmniej na trzy sposoby, tzn. jako: zbiór punktów (x,
WYBRANE DZIAŁY ANALIZY MATEMATYCZNEJ. Wykład II
 Wykład II I. Algebra wektorów 2.1 Iloczyn wektorowy pary wektorów. 2.1.1 Orientacja przestrzeni Załóżmy, że trójka wektorów a, b i c jest niekomplanarna. Wynika z tego, że żaden z tych wektorów nie jest
Wykład II I. Algebra wektorów 2.1 Iloczyn wektorowy pary wektorów. 2.1.1 Orientacja przestrzeni Załóżmy, że trójka wektorów a, b i c jest niekomplanarna. Wynika z tego, że żaden z tych wektorów nie jest
W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora.
 1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
Matematyka stosowana i metody numeryczne
 Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 14 Rachunekwektorowy W celu zdefiniowania wektora a należy podać: kierunek(prostą na której leży wektor)
Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 14 Rachunekwektorowy W celu zdefiniowania wektora a należy podać: kierunek(prostą na której leży wektor)
Układy współrzędnych
 Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Przestrzeń unitarna. Jacek Kłopotowski. 23 października Katedra Matematyki i Ekonomii Matematycznej SGH
 Katedra Matematyki i Ekonomii Matematycznej SGH 23 października 2018 Definicja iloczynu skalarnego Definicja Iloczynem skalarnym w przestrzeni liniowej R n nazywamy odwzorowanie ( ) : R n R n R spełniające
Katedra Matematyki i Ekonomii Matematycznej SGH 23 października 2018 Definicja iloczynu skalarnego Definicja Iloczynem skalarnym w przestrzeni liniowej R n nazywamy odwzorowanie ( ) : R n R n R spełniające
cx cx 1,cx 2,cx 3,...,cx n. Przykład 4, 5
 Matematyka ZLic - 07 Wektory i macierze Wektorem rzeczywistym n-wymiarowym x x 1, x 2,,x n nazwiemy ciąg n liczb rzeczywistych (tzn odwzorowanie 1, 2,,n R) Zbiór wszystkich rzeczywistych n-wymiarowych
Matematyka ZLic - 07 Wektory i macierze Wektorem rzeczywistym n-wymiarowym x x 1, x 2,,x n nazwiemy ciąg n liczb rzeczywistych (tzn odwzorowanie 1, 2,,n R) Zbiór wszystkich rzeczywistych n-wymiarowych
Matematyka z el. statystyki, # 1 /Geodezja i kartografia I/
 Matematyka z el. statystyki, # 1 /Geodezja i kartografia I/ dr n. mat. Zdzisław Otachel Uniwersytet Przyrodniczy w Lublinie Katedra Zastosowań Matematyki i Informatyki ul. Akademicka 15, p.211a, bud. Agro
Matematyka z el. statystyki, # 1 /Geodezja i kartografia I/ dr n. mat. Zdzisław Otachel Uniwersytet Przyrodniczy w Lublinie Katedra Zastosowań Matematyki i Informatyki ul. Akademicka 15, p.211a, bud. Agro
Arkusz 6. Elementy geometrii analitycznej w przestrzeni
 Arkusz 6. Elementy geometrii analitycznej w przestrzeni Zadanie 6.1. Obliczyć długości podanych wektorów a) a = [, 4, 12] b) b = [, 5, 2 2 ] c) c = [ρ cos φ, ρ sin φ, h], ρ 0, φ, h R c) d = [ρ cos φ cos
Arkusz 6. Elementy geometrii analitycznej w przestrzeni Zadanie 6.1. Obliczyć długości podanych wektorów a) a = [, 4, 12] b) b = [, 5, 2 2 ] c) c = [ρ cos φ, ρ sin φ, h], ρ 0, φ, h R c) d = [ρ cos φ cos
Algebra liniowa z geometrią
 Algebra liniowa z geometrią Maciej Czarnecki 15 stycznia 2013 Spis treści 1 Geometria płaszczyzny 2 1.1 Wektory i skalary........................... 2 1.2 Macierze, wyznaczniki, układy równań liniowych.........
Algebra liniowa z geometrią Maciej Czarnecki 15 stycznia 2013 Spis treści 1 Geometria płaszczyzny 2 1.1 Wektory i skalary........................... 2 1.2 Macierze, wyznaczniki, układy równań liniowych.........
i = [ 0] j = [ 1] k = [ 0]
![i = [ 0] j = [ 1] k = [ 0]](/thumbs/70/62901734.jpg "i = [ 0] j = [ 1] k = [ 0]") Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
Wykład 16. P 2 (x 2, y 2 ) P 1 (x 1, y 1 ) OX. Odległość tych punktów wyraża się wzorem: P 1 P 2 = (x 1 x 2 ) 2 + (y 1 y 2 ) 2
 P 1 (x 1, y 1 ) OX. Odległość tych punktów wyraża się wzorem: P 1 P 2 = (x 1 x 2 ) 2 + (y 1 y 2 ) 2") Wykład 16 Geometria analityczna Przegląd wiadomości z geometrii analitycznej na płaszczyźnie rtokartezjański układ współrzędnych powstaje przez ustalenie punktu początkowego zwanego początkiem układu współrzędnych
Wykład 16 Geometria analityczna Przegląd wiadomości z geometrii analitycznej na płaszczyźnie rtokartezjański układ współrzędnych powstaje przez ustalenie punktu początkowego zwanego początkiem układu współrzędnych
Geometria analityczna
 Geometria analityczna Wektory Zad Dane są wektory #» a, #» b, #» c Znaleźć długość wektora #» x (a #» a = [, 0, ], #» b = [0,, 3], #» c = [,, ], #» x = #» #» a b + 3 #» c ; (b #» a = [,, ], #» b = [,,
Geometria analityczna Wektory Zad Dane są wektory #» a, #» b, #» c Znaleźć długość wektora #» x (a #» a = [, 0, ], #» b = [0,, 3], #» c = [,, ], #» x = #» #» a b + 3 #» c ; (b #» a = [,, ], #» b = [,,
Co to jest wektor? Jest to obiekt posiadający: moduł (długość), kierunek wraz ze zwrotem.
, kierunek wraz ze zwrotem.") 1 Wektory Co to jest wektor? Jest to obiekt posiadający: moduł (długość), kierunek wraz ze zwrotem. 1.1 Dodawanie wektorów graficzne i algebraiczne. Graficzne - metoda równoległoboku. Sprowadzamy wektory
1 Wektory Co to jest wektor? Jest to obiekt posiadający: moduł (długość), kierunek wraz ze zwrotem. 1.1 Dodawanie wektorów graficzne i algebraiczne. Graficzne - metoda równoległoboku. Sprowadzamy wektory
1 Geometria analityczna
 1 Geometria analityczna 1.1 Wektory na płaszczyźnie Wektor to uporządkowana para punktów, z których pierwszy nazywa się początkiem, a drugi końcem wektora. Jeżeli wprowadzimy prostokątny układ współrzędnych,
1 Geometria analityczna 1.1 Wektory na płaszczyźnie Wektor to uporządkowana para punktów, z których pierwszy nazywa się początkiem, a drugi końcem wektora. Jeżeli wprowadzimy prostokątny układ współrzędnych,
WYK LAD 5: GEOMETRIA ANALITYCZNA W R 3, PROSTA I P LASZCZYZNA W PRZESTRZENI R 3
 WYK LAD 5: GEOMETRIA ANALITYCZNA W R 3, PROSTA I P LASZCZYZNA W PRZESTRZENI R 3 Definicja 1 Przestrzenia R 3 nazywamy zbiór uporzadkowanych trójek (x, y, z), czyli R 3 = {(x, y, z) : x, y, z R} Przestrzeń
WYK LAD 5: GEOMETRIA ANALITYCZNA W R 3, PROSTA I P LASZCZYZNA W PRZESTRZENI R 3 Definicja 1 Przestrzenia R 3 nazywamy zbiór uporzadkowanych trójek (x, y, z), czyli R 3 = {(x, y, z) : x, y, z R} Przestrzeń
Wektory. Algebra. Aleksander Denisiuk. Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi Gdańsk
 Algebra Wektory Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045 Gdańsk Algebra p. 1 Wektory Najnowsza wersja
Algebra Wektory Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045 Gdańsk Algebra p. 1 Wektory Najnowsza wersja
Informacja o przestrzeniach Hilberta
 Temat 10 Informacja o przestrzeniach Hilberta 10.1 Przestrzenie unitarne, iloczyn skalarny Niech dana będzie przestrzeń liniowa X. Załóżmy, że każdej parze elementów x, y X została przyporządkowana liczba
Temat 10 Informacja o przestrzeniach Hilberta 10.1 Przestrzenie unitarne, iloczyn skalarny Niech dana będzie przestrzeń liniowa X. Załóżmy, że każdej parze elementów x, y X została przyporządkowana liczba
Iloczyn skalarny. Mirosław Sobolewski. Wydział Matematyki, Informatyki i Mechaniki UW. 10. wykład z algebry liniowej Warszawa, grudzień 2013
 Iloczyn skalarny Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 10. wykład z algebry liniowej Warszawa, grudzień 2013 Mirosław Sobolewski (UW) Warszawa, grudzień 2013 1 / 14 Standardowy
Iloczyn skalarny Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 10. wykład z algebry liniowej Warszawa, grudzień 2013 Mirosław Sobolewski (UW) Warszawa, grudzień 2013 1 / 14 Standardowy
Akwizycja i przetwarzanie sygnałów cyfrowych
 Akwizycja i przetwarzanie sygnałów cyfrowych Instytut Teleinformatyki ITI PK Kraków 21 luty 2011 Reprezentacje sygnału Jak reprezentujemy sygnał: wybieramy sygnały wzorcowe (bazę) rozwijamy sygnał w wybranej
Akwizycja i przetwarzanie sygnałów cyfrowych Instytut Teleinformatyki ITI PK Kraków 21 luty 2011 Reprezentacje sygnału Jak reprezentujemy sygnał: wybieramy sygnały wzorcowe (bazę) rozwijamy sygnał w wybranej
ALGEBRA z GEOMETRIA, ANALITYCZNA,
 ALGEBRA z GEOMETRIA, ANALITYCZNA, MAT00405 PRZEKSZTAL CANIE WYRAZ EN ALGEBRAICZNYCH, WZO R DWUMIANOWY NEWTONA Uprościć podane wyrażenia 7; (b) ( 6)( + ); (c) a 5 6 8a ; (d) ( 5 )( 5 + ); (e) ( 45x 4 y
ALGEBRA z GEOMETRIA, ANALITYCZNA, MAT00405 PRZEKSZTAL CANIE WYRAZ EN ALGEBRAICZNYCH, WZO R DWUMIANOWY NEWTONA Uprościć podane wyrażenia 7; (b) ( 6)( + ); (c) a 5 6 8a ; (d) ( 5 )( 5 + ); (e) ( 45x 4 y
Rachunek wektorowy - wprowadzenie. dr inż. Romuald Kędzierski
 Rachunek wektorowy - wprowadzenie dr inż. Romuald Kędzierski Graficzne przedstawianie wielkości wektorowych Długość wektora jest miarą jego wartości Linia prosta wyznaczająca kierunek działania wektora
Rachunek wektorowy - wprowadzenie dr inż. Romuald Kędzierski Graficzne przedstawianie wielkości wektorowych Długość wektora jest miarą jego wartości Linia prosta wyznaczająca kierunek działania wektora
Wykład 9. Matematyka 3, semestr zimowy 2011/ listopada 2011
 Wykład 9. Matematyka 3, semestr zimowy 2011/2012 4 listopada 2011 W trakcie poprzedniego wykładu zdefiniowaliśmy pojęcie k-kowektora na przestrzeni wektorowej. Wprowadziliśmy także iloczyn zewnętrzny wielokowektorów
Wykład 9. Matematyka 3, semestr zimowy 2011/2012 4 listopada 2011 W trakcie poprzedniego wykładu zdefiniowaliśmy pojęcie k-kowektora na przestrzeni wektorowej. Wprowadziliśmy także iloczyn zewnętrzny wielokowektorów
Geometria w R 3. Iloczyn skalarny wektorów
 Geometria w R 3 Andrzej Musielak Str 1 Geometria w R 3 Działania na wektorach Wektory w R 3 możemy w naturalny sposób dodawać i odejmować, np.: [2, 3, 1] + [ 1, 2, 1] = [1, 5, 2] [2, 3, 1] [ 1, 2, 1] =
Geometria w R 3 Andrzej Musielak Str 1 Geometria w R 3 Działania na wektorach Wektory w R 3 możemy w naturalny sposób dodawać i odejmować, np.: [2, 3, 1] + [ 1, 2, 1] = [1, 5, 2] [2, 3, 1] [ 1, 2, 1] =
Lista. Przestrzenie liniowe. Zadanie 1 Sprawdź, czy (V, +, ) jest przestrzenią liniową nadr :
 jest przestrzenią liniową nadr :") Lista Przestrzenie liniowe Zadanie 1 Sprawdź, czy (V, +, ) jest przestrzenią liniową nadr : V = R[X], zbiór wielomianów jednej zmiennej o współczynnikach rzeczywistych, wraz ze standardowym dodawaniem
Lista Przestrzenie liniowe Zadanie 1 Sprawdź, czy (V, +, ) jest przestrzenią liniową nadr : V = R[X], zbiór wielomianów jednej zmiennej o współczynnikach rzeczywistych, wraz ze standardowym dodawaniem
1 Rozwiązywanie układów równań. Wyznaczniki. 2 Wektory kilka faktów użytkowych
 Rozwiązywanie układów równań. Wyznaczniki. 2 Wektory kilka faktów użytkowych 2. Wektory. 2.. Wektor jako n ka liczb W fizyce mamy do czynienia z pojęciami lub obiektami o różnym charakterze. Są np. wielkości,
Rozwiązywanie układów równań. Wyznaczniki. 2 Wektory kilka faktów użytkowych 2. Wektory. 2.. Wektor jako n ka liczb W fizyce mamy do czynienia z pojęciami lub obiektami o różnym charakterze. Są np. wielkości,
Wektory. dr Jolanta Grala-Michalak. Teoria
 Wektory dr Jolanta Grala-Michalak Teoria Uważa się, że pierwszym podręcznikiem geometrii jest dzieło Euklidesa Elementy, napisane w III wieku p.n.e. Opisywana w nim płaszczyzna i przestrzeń zawierają różne
Wektory dr Jolanta Grala-Michalak Teoria Uważa się, że pierwszym podręcznikiem geometrii jest dzieło Euklidesa Elementy, napisane w III wieku p.n.e. Opisywana w nim płaszczyzna i przestrzeń zawierają różne
ALGEBRA LINIOWA 2. Lista zadań 2003/2004. Opracowanie : dr Teresa Jurlewicz, dr Zbigniew Skoczylas
 ALGEBRA LINIOWA 2 Lista zadań 23/24 Opracowanie : dr Teresa Jurlewicz dr Zbigniew Skoczylas Lista pierwsza Zadanie Uzasadnić z definicji że zbiór wszystkich rzeczywistych macierzy trójkątnych górnych stopnia
ALGEBRA LINIOWA 2 Lista zadań 23/24 Opracowanie : dr Teresa Jurlewicz dr Zbigniew Skoczylas Lista pierwsza Zadanie Uzasadnić z definicji że zbiór wszystkich rzeczywistych macierzy trójkątnych górnych stopnia
Zaawansowane metody numeryczne
 Wykład 6 Własności wielomianów ortogonalnych Wszystkie znane rodziny wielomianów ortogonalnych dzielą pewne wspólne cechy: 1) definicja za pomocą wzoru różniczkowego, jawnej sumy lub funkcji tworzącej;
Wykład 6 Własności wielomianów ortogonalnych Wszystkie znane rodziny wielomianów ortogonalnych dzielą pewne wspólne cechy: 1) definicja za pomocą wzoru różniczkowego, jawnej sumy lub funkcji tworzącej;
Algebra Liniowa 2 (INF, TIN), MAP1152 Lista zadań
, MAP1152 Lista zadań") Algebra Liniowa 2 (INF, TIN), MAP1152 Lista zadań Przekształcenia liniowe, diagonalizacja macierzy 1. Podano współrzędne wektora v w bazie B. Znaleźć współrzędne tego wektora w bazie B, gdy: a) v = (1,
Algebra Liniowa 2 (INF, TIN), MAP1152 Lista zadań Przekształcenia liniowe, diagonalizacja macierzy 1. Podano współrzędne wektora v w bazie B. Znaleźć współrzędne tego wektora w bazie B, gdy: a) v = (1,
1. Liczby zespolone. Jacek Jędrzejewski 2011/2012
 1. Liczby zespolone Jacek Jędrzejewski 2011/2012 Spis treści 1 Liczby zespolone 2 1.1 Definicja liczby zespolonej.................... 2 1.2 Postać kanoniczna liczby zespolonej............... 1. Postać
1. Liczby zespolone Jacek Jędrzejewski 2011/2012 Spis treści 1 Liczby zespolone 2 1.1 Definicja liczby zespolonej.................... 2 1.2 Postać kanoniczna liczby zespolonej............... 1. Postać
1 Przestrzeń liniowa. α 1 x α k x k = 0
 Z43: Algebra liniowa Zagadnienie: przekształcenie liniowe, macierze, wyznaczniki Zadanie: przekształcenie liniowe, jądro i obraz, interpretacja geometryczna. Przestrzeń liniowa Już w starożytności człowiek
Z43: Algebra liniowa Zagadnienie: przekształcenie liniowe, macierze, wyznaczniki Zadanie: przekształcenie liniowe, jądro i obraz, interpretacja geometryczna. Przestrzeń liniowa Już w starożytności człowiek
Wektor, prosta, płaszczyzna; liniowa niezależność, rząd macierzy
 Wektor, prosta, płaszczyzna; liniowa niezależność, rząd macierzy Justyna Winnicka Na podstawie podręcznika Matematyka. e-book M. Dędys, S. Dorosiewicza, M. Ekes, J. Kłopotowskiego. rok akademicki 217/218
Wektor, prosta, płaszczyzna; liniowa niezależność, rząd macierzy Justyna Winnicka Na podstawie podręcznika Matematyka. e-book M. Dędys, S. Dorosiewicza, M. Ekes, J. Kłopotowskiego. rok akademicki 217/218
Zadania egzaminacyjne
 Rozdział 13 Zadania egzaminacyjne Egzamin z algebry liniowej AiR termin I 03022011 Zadanie 1 Wyznacz sumę rozwiązań równania: (8z + 1 i 2 2 7 iz 4 = 0 Zadanie 2 Niech u 0 = (1, 2, 1 Rozważmy odwzorowanie
Rozdział 13 Zadania egzaminacyjne Egzamin z algebry liniowej AiR termin I 03022011 Zadanie 1 Wyznacz sumę rozwiązań równania: (8z + 1 i 2 2 7 iz 4 = 0 Zadanie 2 Niech u 0 = (1, 2, 1 Rozważmy odwzorowanie
1 Zbiory i działania na zbiorach.
 Matematyka notatki do wykładu 1 Zbiory i działania na zbiorach Pojęcie zbioru jest to pojęcie pierwotne (nie definiuje się tego pojęcia) Pojęciami pierwotnymi są: element zbioru i przynależność elementu
Matematyka notatki do wykładu 1 Zbiory i działania na zbiorach Pojęcie zbioru jest to pojęcie pierwotne (nie definiuje się tego pojęcia) Pojęciami pierwotnymi są: element zbioru i przynależność elementu
Kierunek i poziom studiów: Matematyka, studia I stopnia (licencjackie), rok I
, rok I") Uniwersytet Śląski w Katowicach str. 1 Kierunek i poziom studiów: Matematyka, studia I stopnia (licencjackie), rok I Sylabus modułu: Wstęp do algebry liniowej i geometrii analitycznej (03-M01N-12-WALG)
Uniwersytet Śląski w Katowicach str. 1 Kierunek i poziom studiów: Matematyka, studia I stopnia (licencjackie), rok I Sylabus modułu: Wstęp do algebry liniowej i geometrii analitycznej (03-M01N-12-WALG)
Przestrzenie liniowe
 Przestrzenie liniowe Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 2 wykład z algebry liniowej Warszawa, październik 2015 Mirosław Sobolewski (UW) Warszawa, wrzesień 2015 1 / 10 Przestrzenie
Przestrzenie liniowe Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 2 wykład z algebry liniowej Warszawa, październik 2015 Mirosław Sobolewski (UW) Warszawa, wrzesień 2015 1 / 10 Przestrzenie
3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B
![3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B](/thumbs/73/69286698.jpg "3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B") 1. Dla macierzy a) A = b) A = c) A = d) A = 3 1 + i 1 i i i 0 i i 0 1 + i 1 i 0 0 0 0 1 0 1 0 1 + i 1 i Wyznaczyć macierze spełniające własność komutacji: A, X = B. Obliczyć pierwiaski z macierzy: A =
1. Dla macierzy a) A = b) A = c) A = d) A = 3 1 + i 1 i i i 0 i i 0 1 + i 1 i 0 0 0 0 1 0 1 0 1 + i 1 i Wyznaczyć macierze spełniające własność komutacji: A, X = B. Obliczyć pierwiaski z macierzy: A =
Liczby zespolone. x + 2 = 0.
 Liczby zespolone 1 Wiadomości wstępne Rozważmy równanie wielomianowe postaci x + 2 = 0. Współczynniki wielomianu stojącego po lewej stronie są liczbami całkowitymi i jedyny pierwiastek x = 2 jest liczbą
Liczby zespolone 1 Wiadomości wstępne Rozważmy równanie wielomianowe postaci x + 2 = 0. Współczynniki wielomianu stojącego po lewej stronie są liczbami całkowitymi i jedyny pierwiastek x = 2 jest liczbą
Skrypt z Algebry Liniowej 2
 Uniwersytet Wrocławski Wydział Matematyki i Informatyki Instytut Matematyczny specjalność: matematyka nauczycielska Barbara Szczepańska Skrypt z Algebry Liniowej 2 Praca magisterska napisana pod kierunkiem
Uniwersytet Wrocławski Wydział Matematyki i Informatyki Instytut Matematyczny specjalność: matematyka nauczycielska Barbara Szczepańska Skrypt z Algebry Liniowej 2 Praca magisterska napisana pod kierunkiem
1 Formy hermitowskie. GAL (Informatyka) Wykład - formy hermitowskie. Paweł Bechler
 Wykład - formy hermitowskie. Paweł Bechler") GAL (Informatyka) Wykład - formy hermitowskie Wersja z dnia 23 stycznia 2014 Paweł Bechler 1 Formy hermitowskie Niech X oznacza przestrzeń liniową nad ciałem K. Definicja 1. Funkcję φ : X X K nazywamy
GAL (Informatyka) Wykład - formy hermitowskie Wersja z dnia 23 stycznia 2014 Paweł Bechler 1 Formy hermitowskie Niech X oznacza przestrzeń liniową nad ciałem K. Definicja 1. Funkcję φ : X X K nazywamy
Geometria analityczna - przykłady
 Geometria analityczna - przykłady 1. Znaleźć równanie ogólne i równania parametryczne prostej w R 2, któr przechodzi przez punkt ( 4, ) oraz (a) jest równoległa do prostej x + 5y 2 = 0. (b) jest prostopadła
Geometria analityczna - przykłady 1. Znaleźć równanie ogólne i równania parametryczne prostej w R 2, któr przechodzi przez punkt ( 4, ) oraz (a) jest równoległa do prostej x + 5y 2 = 0. (b) jest prostopadła
Wektory. dr Jolanta Grala-Michalak. Teoria
 Wektory dr Jolanta Grala-Michalak Teoria Uważa się, że pierwszym podręcznikiem geometrii jest dzieło Euklidesa Elementy, napisane w III wieku p.n.e. Opisywana w nim płaszczyzna i przestrzeń zawierają różne
Wektory dr Jolanta Grala-Michalak Teoria Uważa się, że pierwszym podręcznikiem geometrii jest dzieło Euklidesa Elementy, napisane w III wieku p.n.e. Opisywana w nim płaszczyzna i przestrzeń zawierają różne
Elementy grafiki komputerowej. Elementy geometrii afinicznej
 Elementy grafiki komputerowej. Elementy geometrii j Aleksander Denisiuk Uniwersytet Warmińsko-Mazurski Olsztyn, ul. Słoneczna 54 denisjuk@matman.uwm.edu.pl 1 / 28 Elementy geometrii j Najnowsza wersja
Elementy grafiki komputerowej. Elementy geometrii j Aleksander Denisiuk Uniwersytet Warmińsko-Mazurski Olsztyn, ul. Słoneczna 54 denisjuk@matman.uwm.edu.pl 1 / 28 Elementy geometrii j Najnowsza wersja
1 Funkcje dwóch zmiennych podstawowe pojęcia
 1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
Kierunek i poziom studiów: Matematyka, studia I stopnia (licencjackie), rok I
, rok I") Uniwersytet Śląski w Katowicach str. 1 Kierunek i poziom studiów: Matematyka, studia I stopnia (licencjackie), rok I Sylabus modułu: Wstęp do algebry liniowej i geometrii analitycznej A (03-M01S-12-WALGA)
Uniwersytet Śląski w Katowicach str. 1 Kierunek i poziom studiów: Matematyka, studia I stopnia (licencjackie), rok I Sylabus modułu: Wstęp do algebry liniowej i geometrii analitycznej A (03-M01S-12-WALGA)
Dystrybucje. Marcin Orchel. 1 Wstęp Dystrybucje Pochodna dystrybucyjna Przestrzenie... 5
 Dystrybucje Marcin Orchel Spis treści 1 Wstęp 1 1.1 Dystrybucje................................... 1 1.2 Pochodna dystrybucyjna............................ 3 1.3 Przestrzenie...................................
Dystrybucje Marcin Orchel Spis treści 1 Wstęp 1 1.1 Dystrybucje................................... 1 1.2 Pochodna dystrybucyjna............................ 3 1.3 Przestrzenie...................................
Geometria Analityczna w Przestrzeni
 Algebra p. 1/25 Algebra Geometria Analityczna w Przestrzeni Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045
Algebra p. 1/25 Algebra Geometria Analityczna w Przestrzeni Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045
Dr inż. Janusz Dębiński Mechanika ogólna Wykład 2 Podstawowe wiadomości z matematyki Kalisz
 Dr inż. Janusz Dębiński Mechanika ogólna Wykład 2 Podstawowe wiadomości z matematyki Kalisz Dr inż. Janusz Dębiński 1 2.1. Przestrzeń i płaszczyzna Podstawowe definicje Punkt - najmniejszy bezwymiarowy
Dr inż. Janusz Dębiński Mechanika ogólna Wykład 2 Podstawowe wiadomości z matematyki Kalisz Dr inż. Janusz Dębiński 1 2.1. Przestrzeń i płaszczyzna Podstawowe definicje Punkt - najmniejszy bezwymiarowy
Lista. Algebra z Geometrią Analityczną. Zadanie 1 Przypomnij definicję grupy, które z podanych struktur są grupami:
 Lista Algebra z Geometrią Analityczną Zadanie 1 Przypomnij definicję grupy, które z podanych struktur są grupami: (N, ), (Z, +) (Z, ), (R, ), (Q \ {}, ) czym jest element neutralny i przeciwny w grupie?,
Lista Algebra z Geometrią Analityczną Zadanie 1 Przypomnij definicję grupy, które z podanych struktur są grupami: (N, ), (Z, +) (Z, ), (R, ), (Q \ {}, ) czym jest element neutralny i przeciwny w grupie?,
macierze jednostkowe (identyczności) macierze diagonalne, które na przekątnej mają same
 macierze diagonalne, które na przekątnej mają same") 1 Macierz definicja i zapis Macierzą wymiaru m na n nazywamy tabelę a 11 a 1n A = a m1 a mn złożoną z liczb (rzeczywistych lub zespolonych) o m wierszach i n kolumnach (zamiennie będziemy też czasem mówili,
1 Macierz definicja i zapis Macierzą wymiaru m na n nazywamy tabelę a 11 a 1n A = a m1 a mn złożoną z liczb (rzeczywistych lub zespolonych) o m wierszach i n kolumnach (zamiennie będziemy też czasem mówili,
Całki powierzchniowe w R n
 Całki powierzchniowe w R n Na początek małe uzupełnienie z algebry liniowej. Niech R n k oznacza przestrzeń liniową macierzy o n wierszach i k kolumnach. Dla dowolnej macierzy A R n k, gdzie k n, połóżmy
Całki powierzchniowe w R n Na początek małe uzupełnienie z algebry liniowej. Niech R n k oznacza przestrzeń liniową macierzy o n wierszach i k kolumnach. Dla dowolnej macierzy A R n k, gdzie k n, połóżmy
3. FUNKCJA LINIOWA. gdzie ; ół,.
 1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
Aproksymacja. j<k. L 2 p[a, b] l 2 p,n X = Lemat 1. Wielomiany ortogonalne P 0,P 1,...,P n tworza przestrzeni liniowej Π n. Dowód.
![Aproksymacja. j<k. L 2 p[a, b] l 2 p,n X = Lemat 1. Wielomiany ortogonalne P 0,P 1,...,P n tworza przestrzeni liniowej Π n. Dowód.](/thumbs/98/135408382.jpg "Aproksymacja. j<k. L 2 p[a, b] l 2 p,n X = Lemat 1. Wielomiany ortogonalne P 0,P 1,...,P n tworza przestrzeni liniowej Π n. Dowód.") Metody numeryczne Paweł Zieliński p. 1/19 Lemat 1. Wielomiany ortogonalne P 0,P 1,...,P n tworza bazę przestrzeni liniowej Π n. Dowód. Lemat 2. Dowolny wielomian Q j stopnia j niższego od k jest prostopadły
Metody numeryczne Paweł Zieliński p. 1/19 Lemat 1. Wielomiany ortogonalne P 0,P 1,...,P n tworza bazę przestrzeni liniowej Π n. Dowód. Lemat 2. Dowolny wielomian Q j stopnia j niższego od k jest prostopadły
19 Własności iloczynu skalarnego: norma, kąt i odległość
 19 Własności iloczynu skalarnego: norma, kąt i odległość Załóżmy, że V jest przestrzenią liniową z iloczynem skalarnym.,.. Definicja 19.1 Normą (długością) wektora v V nazywamy liczbę v = v, v. Uwaga 1
19 Własności iloczynu skalarnego: norma, kąt i odległość Załóżmy, że V jest przestrzenią liniową z iloczynem skalarnym.,.. Definicja 19.1 Normą (długością) wektora v V nazywamy liczbę v = v, v. Uwaga 1
Wyznaczniki. Mirosław Sobolewski. Wydział Matematyki, Informatyki i Mechaniki UW. 6. Wykład z algebry liniowej Warszawa, listopad 2013
 Wyznaczniki Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 6. Wykład z algebry liniowej Warszawa, listopad 2013 Mirosław Sobolewski (UW) Warszawa, listopad 2013 1 / 13 Terminologia
Wyznaczniki Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 6. Wykład z algebry liniowej Warszawa, listopad 2013 Mirosław Sobolewski (UW) Warszawa, listopad 2013 1 / 13 Terminologia
Wprowadzenie do metod numerycznych Wykład 3 Metody algebry liniowej I Wektory i macierze
 Wprowadzenie do metod numerycznych Wykład 3 Metody algebry liniowej I Wektory i macierze Polsko-Japońska Wyższa Szkoła Technik Komputerowych Katedra Informatyki Stosowanej Spis treści Spis treści 1 Wektory
Wprowadzenie do metod numerycznych Wykład 3 Metody algebry liniowej I Wektory i macierze Polsko-Japońska Wyższa Szkoła Technik Komputerowych Katedra Informatyki Stosowanej Spis treści Spis treści 1 Wektory
2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I
![2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I](/thumbs/88/115575416.jpg "2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I") Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Definicja i własności wartości bezwzględnej.
 Równania i nierówności z wartością bezwzględną. Rozwiązywanie układów dwóch (trzech) równań z dwiema (trzema) niewiadomymi. Układy równań liniowych z parametrem, analiza rozwiązań. Definicja i własności
Równania i nierówności z wartością bezwzględną. Rozwiązywanie układów dwóch (trzech) równań z dwiema (trzema) niewiadomymi. Układy równań liniowych z parametrem, analiza rozwiązań. Definicja i własności
Funkcja liniowa i prosta podsumowanie
 Funkcja liniowa i prosta podsumowanie Definicja funkcji liniowej Funkcja liniowa określona jest wzorem postaci: y = ax + b, x R, a R, b R a, b współczynniki funkcji dowolne liczby rzeczywiste a- współczynnik
Funkcja liniowa i prosta podsumowanie Definicja funkcji liniowej Funkcja liniowa określona jest wzorem postaci: y = ax + b, x R, a R, b R a, b współczynniki funkcji dowolne liczby rzeczywiste a- współczynnik
ALGEBRA Tematyka LITERATURA
 ALGEBRA Tematyka Podstawowe pojęcia algebry: działania, własności działań. Struktury algebraiczne: grupy, pierścienie, ciała, przestrzenie liniowe. Ciała liczbowe: ciało liczb wymiernych, ciało liczb rzeczywistych,
ALGEBRA Tematyka Podstawowe pojęcia algebry: działania, własności działań. Struktury algebraiczne: grupy, pierścienie, ciała, przestrzenie liniowe. Ciała liczbowe: ciało liczb wymiernych, ciało liczb rzeczywistych,
Funkcja liniowa -zadania. Funkcja liniowa jest to funkcja postaci y = ax + b dla x R gdzie a, b R oraz
 Funkcja liniowa jest to funkcja postaci y = ax + b dla x R gdzie a, b R oraz x argumenty funkcji y wartości funkcji a współczynnik kierunkowy prostej ( a = tg, gdzie osi OX) - kąt nachylenia wykresu funkcji
Funkcja liniowa jest to funkcja postaci y = ax + b dla x R gdzie a, b R oraz x argumenty funkcji y wartości funkcji a współczynnik kierunkowy prostej ( a = tg, gdzie osi OX) - kąt nachylenia wykresu funkcji
Formy kwadratowe. Mirosław Sobolewski. Wydział Matematyki, Informatyki i Mechaniki UW. wykład z algebry liniowej Warszawa, styczeń 2009
 Formy kwadratowe Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW wykład z algebry liniowej Warszawa, styczeń 2009 Mirosław Sobolewski (UW) Warszawa, 2009 1 / 15 Definicja Niech V, W,
Formy kwadratowe Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW wykład z algebry liniowej Warszawa, styczeń 2009 Mirosław Sobolewski (UW) Warszawa, 2009 1 / 15 Definicja Niech V, W,
Wektory w przestrzeni
 Wektory w przestrzeni Informacje pomocnicze Denicja 1. Wektorem nazywamy uporz dkowan par punktów. Pierwszy z tych punktów nazywamy pocz tkiem wektora albo punktem zaczepienia wektora, a drugi - ko«cem
Wektory w przestrzeni Informacje pomocnicze Denicja 1. Wektorem nazywamy uporz dkowan par punktów. Pierwszy z tych punktów nazywamy pocz tkiem wektora albo punktem zaczepienia wektora, a drugi - ko«cem
PRÓBNA MATURA ZADANIA PRZYKŁADOWE
 ZESPÓŁ SZKÓŁ HOTELARSKO TURYSTYCZNO GASTRONOMICZNYCH NR UL. KRASNOŁĘCKA 3, WARSZAWA Z A D AN I A Z A M K N I Ę T E ) Liczba, której 5% jest równe 6, to : A. 0,3 C. 30. D. 0 5% 6 II sposób: x nieznana liczba
ZESPÓŁ SZKÓŁ HOTELARSKO TURYSTYCZNO GASTRONOMICZNYCH NR UL. KRASNOŁĘCKA 3, WARSZAWA Z A D AN I A Z A M K N I Ę T E ) Liczba, której 5% jest równe 6, to : A. 0,3 C. 30. D. 0 5% 6 II sposób: x nieznana liczba
φ(x 1,..., x n ) = a i x 2 i +
 = a i x 2 i +") Teoria na egzamin z algebry liniowej Wszystkie podane pojęcia należy umieć określić i podać pprzykłady, ewentualnie kontrprzykłady. Ponadto należy znać dowody tam gdzie to jest zaznaczone. Liczby zespolone.
Teoria na egzamin z algebry liniowej Wszystkie podane pojęcia należy umieć określić i podać pprzykłady, ewentualnie kontrprzykłady. Ponadto należy znać dowody tam gdzie to jest zaznaczone. Liczby zespolone.
Zajęcia nr 1 (1h) Dwumian Newtona. Indukcja. Zajęcia nr 2 i 3 (4h) Trygonometria
 Dwumian Newtona. Indukcja. Zajęcia nr 2 i 3 (4h) Trygonometria") Technologia Chemiczna 008/09 Zajęcia wyrównawcze. Pokazać, że: ( )( ) n k k l = ( n l )( n l k l Zajęcia nr (h) Dwumian Newtona. Indukcja. ). Rozwiązać ( ) ( równanie: ) n n a) = 0 b) 3 ( ) n 3. Znaleźć
Technologia Chemiczna 008/09 Zajęcia wyrównawcze. Pokazać, że: ( )( ) n k k l = ( n l )( n l k l Zajęcia nr (h) Dwumian Newtona. Indukcja. ). Rozwiązać ( ) ( równanie: ) n n a) = 0 b) 3 ( ) n 3. Znaleźć
ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ. 1. Ciała
 ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ WSHE, O/K-CE 1. Ciała Definicja 1. Układ { ; 0, 1; +, } złożony ze zbioru, dwóch wyróżnionych elementów 0, 1 oraz dwóch działań +:, : nazywamy ciałem
ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ WSHE, O/K-CE 1. Ciała Definicja 1. Układ { ; 0, 1; +, } złożony ze zbioru, dwóch wyróżnionych elementów 0, 1 oraz dwóch działań +:, : nazywamy ciałem
Algebra z geometrią Lista 1 - Liczby zespolone
 Algebra z geometrią Lista 1 - Liczby zespolone 1. Oblicz a) (1 + i)(2 i); b) (3 + 2i) 2 ; c) (2 + i)(2 i); d) (3 i)/(1 + i); e) (1 + i 3)/(2 + i 3); f) (2 + i) 3 ; g) ( 3 i) 3 ; h) ( 2 + i 3) 2 2. Korzystając
Algebra z geometrią Lista 1 - Liczby zespolone 1. Oblicz a) (1 + i)(2 i); b) (3 + 2i) 2 ; c) (2 + i)(2 i); d) (3 i)/(1 + i); e) (1 + i 3)/(2 + i 3); f) (2 + i) 3 ; g) ( 3 i) 3 ; h) ( 2 + i 3) 2 2. Korzystając
1 Podstawowe oznaczenia
 Poniżej mogą Państwo znaleźć skondensowane wiadomości z wykładu. Należy je traktować jako przegląd pojęć, które pojawiły się na wykładzie. Materiały te nie są w pełni tożsame z tym co pojawia się na wykładzie.
Poniżej mogą Państwo znaleźć skondensowane wiadomości z wykładu. Należy je traktować jako przegląd pojęć, które pojawiły się na wykładzie. Materiały te nie są w pełni tożsame z tym co pojawia się na wykładzie.
Met Me ody numer yczne Wykład ykład Dr inż. Mic hał ha Łanc Łan zon Instyt Ins ut Elektr Elektr echn iki echn i Elektrot Elektr echn olo echn
 Metody numeryczne Wykład 3 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Zakres wykładu Pojęcia podstawowe Algebra
Metody numeryczne Wykład 3 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Zakres wykładu Pojęcia podstawowe Algebra
Przekształcenia liniowe
 ALGEBRA LINIOWA 2 Wydział Mechaniczny / AIR, MTR Semestr letni 2009/2010 Prowadzący: dr Teresa Jurlewicz Przekształcenia liniowe Uwaga. W nawiasach kwadratowych podane są numery zadań znajdujących się
ALGEBRA LINIOWA 2 Wydział Mechaniczny / AIR, MTR Semestr letni 2009/2010 Prowadzący: dr Teresa Jurlewicz Przekształcenia liniowe Uwaga. W nawiasach kwadratowych podane są numery zadań znajdujących się
Zadania z algebry liniowej - sem. I Przestrzenie liniowe, bazy, rząd macierzy
 Zadania z algebry liniowej - sem I Przestrzenie liniowe bazy rząd macierzy Definicja 1 Niech (K + ) będzie ciałem (zwanym ciałem skalarów a jego elementy nazywać będziemy skalarami) Przestrzenią liniową
Zadania z algebry liniowej - sem I Przestrzenie liniowe bazy rząd macierzy Definicja 1 Niech (K + ) będzie ciałem (zwanym ciałem skalarów a jego elementy nazywać będziemy skalarami) Przestrzenią liniową
ALGEBRA Z GEOMETRIĄ ANALITYCZNĄ
 ALGEBRA Z GEOMETRIĄ ANALITYCZNĄ Lista zadań dla kursów mających ćwiczenia co dwa tygodnie. Zadania po symbolu potrójne karo omawiane są na ćwiczeniach rzadko, ale warto też poświęcić im nieco uwagi. Przy
ALGEBRA Z GEOMETRIĄ ANALITYCZNĄ Lista zadań dla kursów mających ćwiczenia co dwa tygodnie. Zadania po symbolu potrójne karo omawiane są na ćwiczeniach rzadko, ale warto też poświęcić im nieco uwagi. Przy
1. PODSTAWY TEORETYCZNE
 1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie Teoria sprężystości jest działem mechaniki, zajmującym się bryłami sztywnymi i ciałami plastycznymi. Sprężystość zajmuje się odkształceniami
1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie Teoria sprężystości jest działem mechaniki, zajmującym się bryłami sztywnymi i ciałami plastycznymi. Sprężystość zajmuje się odkształceniami
Matematyka liczby zespolone. Wykład 1
 Matematyka liczby zespolone Wykład 1 Siedlce 5.10.015 Liczby rzeczywiste Zbiór N ={0,1,,3,4,5, } nazywamy zbiorem Liczb naturalnych, a zbiór N + ={1,,3,4, } nazywamy zbiorem liczb naturalnych dodatnich.
Matematyka liczby zespolone Wykład 1 Siedlce 5.10.015 Liczby rzeczywiste Zbiór N ={0,1,,3,4,5, } nazywamy zbiorem Liczb naturalnych, a zbiór N + ={1,,3,4, } nazywamy zbiorem liczb naturalnych dodatnich.
Przestrzenie wektorowe
 Rozdział 4 Przestrzenie wektorowe Rozważania dotyczące przestrzeni wektorowych rozpoczniemy od kilku prostych przykładów. Przykład 4.1. W przestrzeni R 3 = {(x, y, z) : x, y, z R} wprowadzamy dwa działania:
Rozdział 4 Przestrzenie wektorowe Rozważania dotyczące przestrzeni wektorowych rozpoczniemy od kilku prostych przykładów. Przykład 4.1. W przestrzeni R 3 = {(x, y, z) : x, y, z R} wprowadzamy dwa działania:
GEOMETRIA ANALITYCZNA. Poziom podstawowy
 GEOMETRIA ANALITYCZNA Poziom podstawowy Zadanie (4 pkt.) Dana jest prosta k opisana równaniem ogólnym x + y 6. a) napisz równanie prostej k w postaci kierunkowej. b) podaj współczynnik kierunkowy prostej
GEOMETRIA ANALITYCZNA Poziom podstawowy Zadanie (4 pkt.) Dana jest prosta k opisana równaniem ogólnym x + y 6. a) napisz równanie prostej k w postaci kierunkowej. b) podaj współczynnik kierunkowy prostej
1.1. Rachunek zdań: alternatywa, koniunkcja, implikacja i równoważność zdań oraz ich zaprzeczenia.
 1. Elementy logiki i algebry zbiorów 1.1. Rachunek zdań: alternatywa, koniunkcja, implikacja i równoważność zdań oraz ich zaprzeczenia. Funkcje zdaniowe. Zdania z kwantyfikatorami oraz ich zaprzeczenia.
1. Elementy logiki i algebry zbiorów 1.1. Rachunek zdań: alternatywa, koniunkcja, implikacja i równoważność zdań oraz ich zaprzeczenia. Funkcje zdaniowe. Zdania z kwantyfikatorami oraz ich zaprzeczenia.
dr Mariusz Grządziel 15,29 kwietnia 2014 Przestrzeń R k R k = R R... R k razy Elementy R k wektory;
 Wykłady 8 i 9 Pojęcia przestrzeni wektorowej i macierzy Układy równań liniowych Elementy algebry macierzy dodawanie, odejmowanie, mnożenie macierzy; macierz odwrotna dr Mariusz Grządziel 15,29 kwietnia
Wykłady 8 i 9 Pojęcia przestrzeni wektorowej i macierzy Układy równań liniowych Elementy algebry macierzy dodawanie, odejmowanie, mnożenie macierzy; macierz odwrotna dr Mariusz Grządziel 15,29 kwietnia
Baza w jądrze i baza obrazu ( )
") Przykład Baza w jądrze i baza obrazu (839) Znajdź bazy jądra i obrazu odwzorowania α : R 4 R 3, gdzie α(x, y, z, t) = (x + 2z + t, 2x + y 3z 5t, x y + z + 4t) () zór ten oznacza, że α jest odwzorowaniem
Przykład Baza w jądrze i baza obrazu (839) Znajdź bazy jądra i obrazu odwzorowania α : R 4 R 3, gdzie α(x, y, z, t) = (x + 2z + t, 2x + y 3z 5t, x y + z + 4t) () zór ten oznacza, że α jest odwzorowaniem
z = x + i y := e i ϕ z. cos ϕ sin ϕ = sin ϕ cos ϕ
 Izometrie liniowe Przypomnijmy, że jeśli V jest przestrzenią euklidesową (skończonego wymiaru), to U End V jest izometrią wtedy i tylko wtedy, gdy U U = UU = E, to znaczy, gdy jest odwzorowaniem ortogonalnym.
Izometrie liniowe Przypomnijmy, że jeśli V jest przestrzenią euklidesową (skończonego wymiaru), to U End V jest izometrią wtedy i tylko wtedy, gdy U U = UU = E, to znaczy, gdy jest odwzorowaniem ortogonalnym.
METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ
 METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ Wykład 3 Elementy analizy pól skalarnych, wektorowych i tensorowych Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej 1 Analiza
METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ Wykład 3 Elementy analizy pól skalarnych, wektorowych i tensorowych Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej 1 Analiza
Elementy geometrii w przestrzeni R 3
 Elementy geometrii w przestrzeni R 3 Z.Šagodowski Politechnika Lubelska 29 maja 2016 Podstawowe denicje Wektorem nazywamy uporz dkowan par punktów (A,B) z których pierwszy nazywa si pocz tkiem a drugi
Elementy geometrii w przestrzeni R 3 Z.Šagodowski Politechnika Lubelska 29 maja 2016 Podstawowe denicje Wektorem nazywamy uporz dkowan par punktów (A,B) z których pierwszy nazywa si pocz tkiem a drugi
Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne.
 Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne. pytania teoretyczne:. Co to znaczy, że wektory v, v 2 i v 3
Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne. pytania teoretyczne:. Co to znaczy, że wektory v, v 2 i v 3
Przestrzenie liniowe
 Rozdział 4 Przestrzenie liniowe 4.1. Działania zewnętrzne Niech X oraz F będą dwoma zbiorami niepustymi. Dowolną funkcję D : F X X nazywamy działaniem zewnętrznym w zbiorze X nad zbiorem F. Przykład 4.1.
Rozdział 4 Przestrzenie liniowe 4.1. Działania zewnętrzne Niech X oraz F będą dwoma zbiorami niepustymi. Dowolną funkcję D : F X X nazywamy działaniem zewnętrznym w zbiorze X nad zbiorem F. Przykład 4.1.
Matematyka II. Bezpieczeństwo jądrowe i ochrona radiologiczna Semestr letni 2018/2019 wykład 13 (27 maja)
") Matematyka II Bezpieczeństwo jądrowe i ochrona radiologiczna Semestr letni 208/209 wykład 3 (27 maja) Całki niewłaściwe przedział nieograniczony Rozpatrujemy funkcje ciągłe określone na zbiorach < a, ),
Matematyka II Bezpieczeństwo jądrowe i ochrona radiologiczna Semestr letni 208/209 wykład 3 (27 maja) Całki niewłaściwe przedział nieograniczony Rozpatrujemy funkcje ciągłe określone na zbiorach < a, ),
WEKTORY skalary wektory W ogólnym przypadku, aby określić wektor, należy znać:
 WEKTORY Wśród wielkości fizycznych występujących w fizyce możn wyróżnić sklry i wektory. Aby określić wielkość sklrną, wystrczy podć tylko jedną liczbę. Wielkościmi tkimi są ms, czs, tempertur, objętość
WEKTORY Wśród wielkości fizycznych występujących w fizyce możn wyróżnić sklry i wektory. Aby określić wielkość sklrną, wystrczy podć tylko jedną liczbę. Wielkościmi tkimi są ms, czs, tempertur, objętość
Definicja macierzy Typy i właściwości macierzy Działania na macierzach Wyznacznik macierzy Macierz odwrotna Normy macierzy RACHUNEK MACIERZOWY
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Czym jest macierz? Definicja Macierzą A nazywamy funkcję
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Czym jest macierz? Definicja Macierzą A nazywamy funkcję
Analiza funkcjonalna 1.
 Analiza funkcjonalna 1. Wioletta Karpińska Semestr letni 2015/2016 0 Bibliografia [1] Banaszczyk W., Analiza matematyczna 3. Wykłady. (http://math.uni.lodz.pl/ wbanasz/am3/) [2] Birkholc A., Analiza matematyczna.
Analiza funkcjonalna 1. Wioletta Karpińska Semestr letni 2015/2016 0 Bibliografia [1] Banaszczyk W., Analiza matematyczna 3. Wykłady. (http://math.uni.lodz.pl/ wbanasz/am3/) [2] Birkholc A., Analiza matematyczna.
Algebra z geometrią analityczną zadania z odpowiedziami
 Algebra z geometrią analityczną zadania z odpowiedziami Maciej Burnecki Spis treści strona główna 1 Wyrażenia algebraiczne, indukcja matematyczna 2 2 Geometria analityczna w R 2 Liczby zespolone 4 4 Wielomiany
Algebra z geometrią analityczną zadania z odpowiedziami Maciej Burnecki Spis treści strona główna 1 Wyrażenia algebraiczne, indukcja matematyczna 2 2 Geometria analityczna w R 2 Liczby zespolone 4 4 Wielomiany
1.1 Definicja. 1.2 Przykład. 1.3 Definicja. Niech G oznacza dowolny, niepusty zbiór.
 20. Definicje i przykłady podstawowych struktur algebraicznych (grupy, pierścienie, ciała, przestrzenie liniowe). Pojęcia dotyczące przestrzeni liniowych (liniowa zależność i niezależność układu wektorów,
20. Definicje i przykłady podstawowych struktur algebraicznych (grupy, pierścienie, ciała, przestrzenie liniowe). Pojęcia dotyczące przestrzeni liniowych (liniowa zależność i niezależność układu wektorów,
Bardziej formalnie, wektor to wielkość, której współrzędne zmieniają się w określony sposób przy obrót prostokątnego układu współrzędnych.
 Rachunek wektorowy (fragmenty z Wikipedii) Zastosowanie wektorów w matematycznym opisie pola elektromagnetycznego umożliwia przedstawienie równań w postaci bardzo zwięzłej i niezależnej od przyjętego układu
Rachunek wektorowy (fragmenty z Wikipedii) Zastosowanie wektorów w matematycznym opisie pola elektromagnetycznego umożliwia przedstawienie równań w postaci bardzo zwięzłej i niezależnej od przyjętego układu
Fizyka. dr Bohdan Bieg p. 36A. wykład ćwiczenia laboratoryjne ćwiczenia rachunkowe
 Fizyka dr ohdan ieg p. 36A wykład ćwiczenia laboratoryjne ćwiczenia rachunkowe Literatura Raymond A. Serway, John W. Jewett, Jr. Physics for Scientists and Engineers, Cengage Learning D. Halliday, D. Resnick,
Fizyka dr ohdan ieg p. 36A wykład ćwiczenia laboratoryjne ćwiczenia rachunkowe Literatura Raymond A. Serway, John W. Jewett, Jr. Physics for Scientists and Engineers, Cengage Learning D. Halliday, D. Resnick,