Sterowniki programowalne
|
|
|
- Dawid Drozd
- 9 lat temu
- Przeglądów:
Transkrypt
1 Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski

2 Plan wykładu Przypomnienie Rodzaje zmiennych Typy danych Podprogramy Elementy logiczne programu Styki, przekaźniki Przekaźniki czasowe, liczniki

3 Plan wykładu cd. Elementy logiczne programu cd. Funkcje matematyczne Relacje matematyczne Operacje bitowe Operacje na danych Operacje tablicowe Funkcje konwersji Funkcje sterujące Najczęściej popełniane błędy logiczne

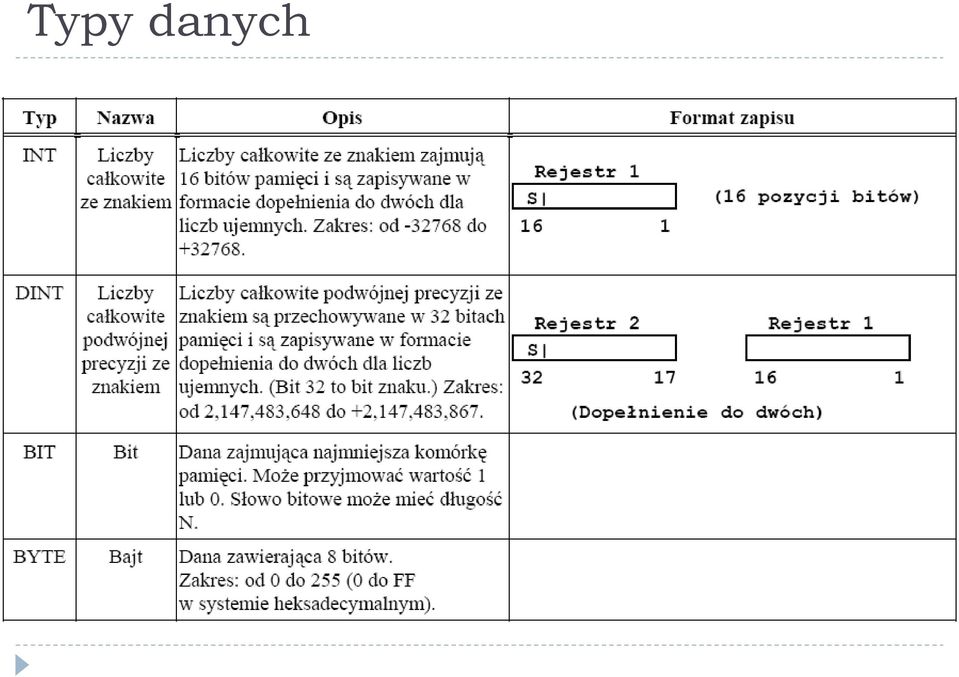
4 Zmienne rejestrowe %R zmienna 16 bitowa, rejestr w którym można przechowywać dane programu sterującego %AI zmienna 16 bitowa, rejestr przeznaczony do wczytania wartości wejścia analogowego %AQ zmienna 16 bitowa, rejestr przeznaczony do zapisu wartości wyjścia analogowego

5 Zmienne dyskretne %I reprezentujące fizyczne wejścia dyskretne %Q - reprezentujące fizyczne wyjścia dyskretne %M reprezentujące wewnętrzne (pomocnicze) zmienne programu sterującego %T tymczasowe (tracące swój stan po zaniku zasilania lub zatrzymaniu/uruchomieniu sterownika) zmienne pomocnicze %S - zmienne systemowe informacyjne (tylko do odczytu) %G zmienne globalne
 %G zmienne")
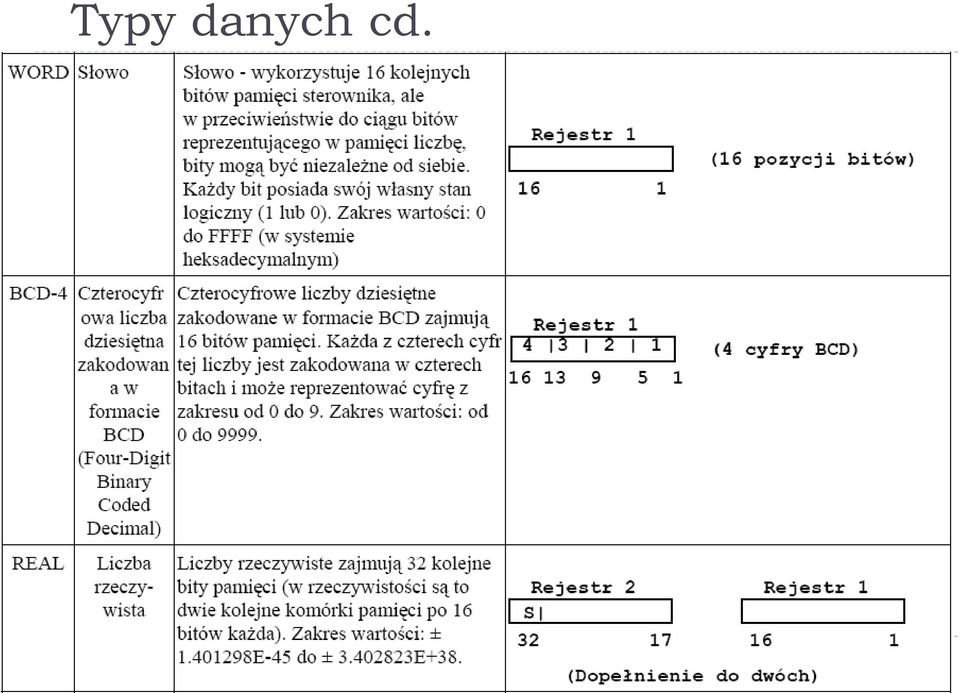
6 Typy danych
7 Typy danych cd.
8 Podprogramy Program może w trakcie wykonywania wywołać podprogram. Podprogram musi zostać zadeklarowany w projekcie dopiero wtedy podprogram ten można wywołać za pomocą instrukcji CALL. Maksymalnie w programie mogą zostać zadeklarowane 64 podprogramy, a dla każdego z bloków programu sterującego dozwolone są 64 instrukcje CALL. Maksymalny rozmiar podprogramów to 16 kb lub 3000 szczebli, lecz program główny wraz ze wszystkimi podprogramami musi zmieścić się w granicach obowiązujących dla poszczególnych jednostek centralnych.

9 Podprogramy (różne możliwości wywołania) a) Wywołanie rożnych podprogramów b)wywołanie 1 podprogramu MAIN MAIN c) Podprogram wywołuje inny podprogram MAIN
 Podprogram wywołuje inny")
10 Idea logiki drabinkowej Język symboliczny przeznaczony dla elektryków, wzorowany na schematach stycznikowo/przekaźnikowych Idea przepływy sygnału i zasilania pozostałych elementów programu Przepływ sygnału od góry do dołu, i od lewej do prawej

11 Idea logiki drabinkowej Szczeble programu Styki sterujące przepływem sygnału przekaźniki Blok funkcyjny Szyna sygnałowa źródło zasilania

12 Styki Służą do sterowania przepływem sygnału w programie drabinkowym Wyróżniamy styki Otwarte Zamknięte Stykom przypisuje się zmienne dyskretne (%I, %Q, %M, %S, %T, %G)

13 Styk otwarty Styk otwarty przewodzi sygnał, gdy przypisana do niego zmienna ma stan logiczny 1. Gdy przypisana zmienna jest w stanie niskim (stan logiczny 0) sygnał nie jest przewodzony

14 Styk zamknięty Styk zamknięty przewodzi sygnał, gdy przypisana do niego zmienna ma stan logiczny 0. Gdy przypisana zmienna jest w stanie wysokim (stan logiczny 1) sygnał nie jest przewodzony

15 Połączenia styków kombinacje logiczne Połączenie szeregowe styków sygnał jest przesyłany wyłącznie, gdy sygnał przewodzą oba styki a) b) (iloczyn logiczny) c)
 b) (iloczyn")
16 Połączenia styków kombinacje logiczne Połączenie równoległe styków sygnał jest przesyłany, gdy sygnał przewodzi przynajmniej jeden styk a) b) (suma logiczna)
 b) (suma")
17 Połączenia złożone CZYTELNOŚĆ!!! %I1 AND (NOT %I2) (%I1 AND (NOT %I2)) OR %I3 ((%I1 AND (NOT %I2)) OR %I3) AND %T1 (((%I1 AND (NOT %I2)) OR %I3) AND %T1) OR (NOT %M2) (((((%I1 AND (NOT %I2)) OR %I3) AND %T1) OR (NOT %M2)) AND (NOT %S5)
 OR (NOT %M2) (((((%I1 AND (NOT %I2)) OR %I3) AND")
18 Przekaźniki Przekaźniki stosowane są w celu wpływania na stan zmiennych dyskretnych (nie dotyczy np. zmiennych %S) Przekaźniki normalny zanegowany SET RESET ze zboczem narastającym ze zboczem opadającym
 Przekaźniki normalny zanegowany SET")
19 Przekaźniki cd. Dopływ sygnału do przekaźnika musi być sterowany przez inne elementy logiczne (np. styki lub bloki funkcyjne) Jeżeli określony stan zmiennej przypisanej przekaźnikowi ma decydować o wykonaniu pewnej części programu sterującego, należy tam zastosować zmienną wewnętrzną Przekaźniki są zawsze umieszczane skrajnie, po prawej stronie linii programu sterującego.

20 Przekaźnik normalny Gdy do przekaźnika normalnego dopłynie sygnał przypisana do niego zmienna zostanie ustawiona w stan wysoki (stan logiczny 1), gdy sygnał nie dopłynie zmienna zostanie ustawiona w stan niski (stan logiczny 0).

21 Przekaźnik zanegowany Gdy do przekaźnika zanegowanego dopłynie sygnał przypisana do niego zmienna zostanie ustawiona w stan niski (stan logiczny 0), gdy sygnał nie dopłynie zmienna zostanie ustawiona w stan wysoki (stan logiczny 1).
22 Przekaźniki sprzężone SET, RESET Gdy do przekaźnika SET dopłynie (choćby na chwilę) sygnał to przypisana do niego zmienna jest ustawiana w stan wysoki. Zmienna ta podtrzymywana jest w stanie wysokim, aż do zadziałania sprzężonego (przez nazwę zmiennej) przekaźnika RESET, wtedy jest ustawiana w stan niski
23 Przekaźniki SET, RESET cd.
24 Przekaźnik ze zboczem narastającym Gdy do przekaźnika nie dopływał sygnał, a w bieżącym cyklu zaczął dopływać to na czas jednego cyklu przypisana do niego zmienna ustawiana jest w stan wysoki
25 Przekaźniki z pamięcią Przekaźniki te działają analogicznie do odpowiadających im typom przekaźników bez pamięci, jednak stan zmiennej przypisanej do takiego przekaźnika zostaje zachowany nawet po wyłączeniu zasilania (za wyjątkiem %T i oczywiście %S)
26 Przekaźniki czasowe (timers) i liczniki (counters) Służą do odmierzania czasu i zliczania impulsów Potrzebują do swojej pracy trzech rejestrów pamięci %R Czas może być zliczany w dziesiątych, setnych lub tysięcznych częściach sekundy. Zakres zmierzonej wartości wynosi od 0 do jednostek czasu.zatem zakres 0d sek. do 3276,7 sek.
27 Przekaźnik czasowy TMR Przekaźnik czasowy bez pamięci (TMR) zlicza czas, gdy dopływa do niego sygnał, zostaje wyzerowany, gdy sygnał przestaje dopływać. Czas może być zliczany w dziesiątych, setnych lub tysięcznych częściach sekundy. Zakres zmierzonej wartości wynosi od 0 do jednostek czasu. 3,8 sek.
28 Przekaźnik czasowy ONDTR Przekaźnik czasowy z pamięcią zlicza czas, gdy dopływa do niego sygnał i zatrzymuje naliczoną wartość, gdy sygnał przestaje dopływać. 5,6 sek.
29 Przekaźnik czasowy OFDT Przekaźnik czasowy bez pamięci, z zanegowanym wejściem (OFDT) zlicza czas, gdy nie dopływa do niego sygnał i zostaje wyzerowany, gdy sygnał zacznie dopływać.
30 Licznik zliczający w górę UPCTR Licznik zliczający w górę służy do zliczania impulsów sygnału od 0 do zadanej wartości. Zakres licznika wynosi od 0 do impulsów. Podanie sygnału na wejście zerujące powoduje ustawienie wartości bieżącej licznika na 0. Zbocze narastające sygnału wejściowego (zmiana stanu sygnału wejściowego z 0 na 1) powoduje zwiększenie wartości bieżącej o 1. Wartość ta może być zwiększana ponad wartość zadaną PV. Sygnał wyjściowy jest wysyłany zawsze, gdy wartość bieżąca jest większa lub równa od wartości zadanej.
31 UPCTR
32 Licznik zliczający w dół DNCTR Licznik zliczający w dół (DNTCTR) służy do odliczania impulsów sygnału od zadanej wartości do 0. Minimalna wartość zadana może być równa zero, a maksymalna impulsów. Minimalna wartość bieżąca wynosi Podanie sygnału na wejście zerujące powoduje skopiowanie wartości bieżącej do rejestru, w którym przechowywana jest wartość zadana. Zbocze narastające sygnału wejściowego (zmiana stanu sygnału wejściowego z 0 na 1) powoduje zmniejszenie wartości bieżącej o 1. Sygnał wyjściowy jest wysyłany, gdy wartość bieżąca jest większa lub równa zeru.
33 Funkcje matematyczne * * CPU >= 350
34 Funkcje matematyczne Po doprowadzeniu sygnału do funkcji, wykonywane jest odpowiednie działanie matematyczne na dwóch liczbach I1 i I2, które są parametrami wejściowymi bloku funkcyjnego. Obydwa parametry wejściowe muszą być takiego samego typu. Parametr wyjściowy Q jest też tego samego typu.
35 Funkcje matematyczne %Q1 w stanie wysokim gdy %I1 w stanie wysokim oraz gdy wynik działania bloku jest poprawny
36 Relacje matematyczne
37 Relacje matematyczne przykład %Q1 w stanie wysokim gdy %I1 w stanie wysokim oraz gdy wartość zmiennej %R1 jest większa lub równa wartości zmiennej %R3
38 Operacje bitowe Bloki funkcyjne z tej grupy wykonują operacje logiczne na ciągach bitów. Funkcje AND, OR, XOR i NOT wykonują operacje na pojedynczym słowie. Pozostałe funkcje z tej grupy mogą wykonywać działania na ciągu słów, długość takiego ciągu nie może przekraczać 256 słów. Wszystkie funkcje do operacji bitowych wymagają danych typu WORD.
39 Operacje bitowe cd.
40 Operacje bitowe AND Za każdym razem, po doprowadzeniu sygnału, funkcje AND i OR porównują każdy bit parametru I1 z odpowiednim bitem parametru I2, począwszy od najmniej znaczących bitów. W przypadku funkcji AND, wartość każdego bitu parametru wyjściowego Q jest ustawiana na 1, jeśli odpowiednie bity pierwszego i drugiego parametru wejściowego (tzn. słów I1 oraz I2) mają wartość 1. Jeśli jeden lub obydwa bity mają wartość 0, to wartość odpowiedniego bitu słowa Q ustawiana jest na 0.
41 Operacje bitowe Argumenty mogą być typu mieszanego np. AND %R1 i %I17 W przypadku zmiennych dyskretnych adres zmiennej jest pierwszym bitem (najmniej znaczącym) argumentu W powyższym przypadku wykonywane jest AND na zmiennych ze słowa %R1 i zmiennych od %I17 do %I32 Wyrównywanie do pełnego bajtu!
42 Operacje bitowe Dane są wprawdzie pogrupowane w 16-bitowe słowa, lecz traktowane jako nieprzerwany ciąg bitów, z pierwszym bitem pierwszego słowa stanowiącym bit najbardziej znaczący (MSB), i ostatnim bitem ostatniego słowa stanowiącym bit najmniej znaczący (LSB) Przykładowo, jeśli funkcja ma wykonać operację na trzech słowach o adresie początkowym %R0100, to wykona ją na 48 kolejnych bitach,
43 Operacje bitowe cd.
44 Od 1go do 256 słów bitowych Operacje bitowe - obroty Funkcję SHL można wykorzystać do przesunięcia wszystkich bitów jednego słowa bitowego lub ciągu kilku słów bitowych w lewo, o wyszczególnioną liczbę miejsc. Wyższe bity (z lewej strony słowa) zostają "wypchnięte" ze słowa bitowego. Na puste miejsca zostają wpisane zadane wartości. SHL (Shift Left) SHR (Shift Right)
45 Operacje bitowe - rotacje Funkcję ROL można wykorzystać do przesunięcia wszystkich bitów jednego słowa bitowego lub ciągu kilku słów bitowych w lewo, o wyszczególnioną liczbę miejsc. Najbardziej znaczące bity (z lewej strony słowa), "wypchnięte" ze słowa bitowego zostają wpisane na puste miejsca z prawej strony słowa. ROL ROtation Left
46 Operacje bitowe cd.
47 Operacje bitowe - BTST Funkcja BTST jest stosowana do określenia wartości (0 lub 1) jednego z bitów słowa bitowego, po dopłynięciu do bloku funkcyjnego sygnału wejściowego. Wynik testu zostaje zapisany jako parametr Q.
48 Operacje przemieszczania danych
49 Operacje tablicowe
50 Funkcje konwersji

51 Funkcje sterujące

52 Funkcje sterujące
53 Funkcje sterujące
54 Najczęściej popełniane błędy logiczne(nie konfiguracja, nie składnia) Kilka przekaźników w programie z tym samym adresem zmiennej Brak sprzężenia przekaźników SET RESET tą samą zmienną Nadpisanie rejestrów licznika lub przekaźnika czasowego Niewłaściwa kolejność szczebli
55 Najczęściej popełniane błędy Nadpisanie drugiego słowa zmiennej REAL Przekroczenie zakresu zmiennych Niewłaściwe wykorzystanie procedur Brak inicjalizacji zmiennych BRAK ZEROWANIA PAMIĘCI przy rozpoczęciu testowania programu
56 Bibliografia GE Fanuc Automation, Sterowniki programowalne, Seria 90-30/Versa Max/Micro Opis funkcji, Kraków 1999 pobrane ze stron WWW firmy Astor Katalog Systemów Sterowania GE Fanuc Sterowniki serii 90-30, Astor
Sterowniki Programowalne (SP) Wykład #4
 Wykład #4") Sterowniki Programowalne (SP) Wykład #4 System GE Fanuc serii 90-30 Zasady działania systemu (część II) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski Październik
Sterowniki Programowalne (SP) Wykład #4 System GE Fanuc serii 90-30 Zasady działania systemu (część II) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski Październik
Sterowniki programowalne. System GE Fanuc serii 90-30 Zasady działania systemu (część I)
") Wykład w ramach przedmiotu Sterowniki programowalne System GE Fanuc serii 90-30 Zasady działania systemu (część I) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski Plan wykładu
Wykład w ramach przedmiotu Sterowniki programowalne System GE Fanuc serii 90-30 Zasady działania systemu (część I) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski Plan wykładu
STEROWANIE MASZYN I URZĄDZEŃ I. Laboratorium. 4. Przekaźniki czasowe
 STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 4. Przekaźniki czasowe Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny W tym ćwiczeniu będą realizowane programy sterujące zawierające elementy
STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 4. Przekaźniki czasowe Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny W tym ćwiczeniu będą realizowane programy sterujące zawierające elementy
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki
 Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
Działanie i charakterystyka sterownika GE FANUC VersaMaxNano
 Działanie i charakterystyka sterownika GE FANUC VersaMaxNano Sterownik wykonuje cyklicznie program sterujący. Oprócz wykonywania programu sterującego, sterownik regularnie gromadzi dane z urządzeń wejściowych,
Działanie i charakterystyka sterownika GE FANUC VersaMaxNano Sterownik wykonuje cyklicznie program sterujący. Oprócz wykonywania programu sterującego, sterownik regularnie gromadzi dane z urządzeń wejściowych,
STEROWANIE MASZYN I URZĄDZEŃ I. Laboratorium. 1. Wprowadzenie
 STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 1. Wprowadzenie Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny Ogólny schemat stanowiska laboratoryjnego ze sterownikiem programowalnym przedstawiono
STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 1. Wprowadzenie Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny Ogólny schemat stanowiska laboratoryjnego ze sterownikiem programowalnym przedstawiono
CoDeSys 3 programowanie w języku drabinkowym LD
 Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Podstawy programowania sterowników GeFanuc
 Podstawy programowania sterowników GeFanuc Waldemar Samociuk Zakład Teorii Maszyn i Automatyki Katedra Podstaw Techniki Felin p.110 http://ztmia.ar.lublin.pl/sips waldemar.samociuk@up.lublin,pl Podstawy
Podstawy programowania sterowników GeFanuc Waldemar Samociuk Zakład Teorii Maszyn i Automatyki Katedra Podstaw Techniki Felin p.110 http://ztmia.ar.lublin.pl/sips waldemar.samociuk@up.lublin,pl Podstawy
Norma IEC 1131-3 definiuje podział na dwie zasadnicze grupy:
 1. Standaryzacja metod programowania sterowników PLC Na początkowym etapie rozwoju sterowników PLC każdy producent stosował własny język programowania ze specyficzną listą rozkazów. Jednak wraz z wzrostem
1. Standaryzacja metod programowania sterowników PLC Na początkowym etapie rozwoju sterowników PLC każdy producent stosował własny język programowania ze specyficzną listą rozkazów. Jednak wraz z wzrostem
Język programowania: Lista instrukcji (IL Instruction List)
") Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski 08.12.2009 Norma IEC 1131 Języki tekstowe Języki graficzne
Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski 08.12.2009 Norma IEC 1131 Języki tekstowe Języki graficzne
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Sterownik Visilogic V260
 Sterownik Visilogic V260 Konfiguracja sprzętowa Po wykonaniu konfiguracji sprzętowej (skojarzeniu odpowiedniego modułu SNAP I/O) można przystąpić do tworzenia aplikacji przy użyciu trzech edytorów
Sterownik Visilogic V260 Konfiguracja sprzętowa Po wykonaniu konfiguracji sprzętowej (skojarzeniu odpowiedniego modułu SNAP I/O) można przystąpić do tworzenia aplikacji przy użyciu trzech edytorów
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Katedra Inżynierii Systemów Sterowania WEiA PG. Przemysłowe Sieci Informatyczne Laboratorium
 Katedra Inżynierii Systemów Sterowania WEiA PG Przemysłowe Sieci Informatyczne Laboratorium Instrukcja do ćwiczenia: Sieć Profibus DP (Decentralized Perhipals) Opracowali: Dr inż. Jarosław Tarnawski Dr
Katedra Inżynierii Systemów Sterowania WEiA PG Przemysłowe Sieci Informatyczne Laboratorium Instrukcja do ćwiczenia: Sieć Profibus DP (Decentralized Perhipals) Opracowali: Dr inż. Jarosław Tarnawski Dr
Język FBD w systemie Concept
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
1. Operacje logiczne A B A OR B
 1. Operacje logiczne OR Operacje logiczne są operacjami działającymi na poszczególnych bitach, dzięki czemu można je całkowicie opisać przedstawiając jak oddziałują ze sobą dwa bity. Takie operacje logiczne
1. Operacje logiczne OR Operacje logiczne są operacjami działającymi na poszczególnych bitach, dzięki czemu można je całkowicie opisać przedstawiając jak oddziałują ze sobą dwa bity. Takie operacje logiczne
IC200UDR002 ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO
 IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
STEROWANIE MASZYN I URZĄDZEŃ I. Laboratorium. 8. Układy ciągłe. Regulator PID
 STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5
 Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5 1. Cel ćwiczenia Zapoznanie się z podstawowymi elementami języka drabinkowego i zasadami programowania Programowalnych Sterowników Logicznych
Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5 1. Cel ćwiczenia Zapoznanie się z podstawowymi elementami języka drabinkowego i zasadami programowania Programowalnych Sterowników Logicznych
Zasady wykonywania programu drabinkowego w sterowniku
 Zasady wykonywania programu drabinkowego w sterowniku Programowanie sterownika Modicon Micro 612xx w środowisku uruchomieniowym Modsoft odbywa się przy pomocy języka drabinkowego wspomaganego blokami funkcyjnymi.
Zasady wykonywania programu drabinkowego w sterowniku Programowanie sterownika Modicon Micro 612xx w środowisku uruchomieniowym Modsoft odbywa się przy pomocy języka drabinkowego wspomaganego blokami funkcyjnymi.
Kurs Zaawansowany S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Część 3. Układy sekwencyjne. Układy sekwencyjne i układy iteracyjne - grafy stanów TCiM Wydział EAIiIB Katedra EiASPE 1
 Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Podstawy Informatyki Elementarne podzespoły komputera
 Podstawy Informatyki alina.momot@polsl.pl http://zti.polsl.pl/amomot/pi Plan wykładu 1 Reprezentacja informacji Podstawowe bramki logiczne 2 Przerzutniki Przerzutnik SR Rejestry Liczniki 3 Magistrala Sygnały
Podstawy Informatyki alina.momot@polsl.pl http://zti.polsl.pl/amomot/pi Plan wykładu 1 Reprezentacja informacji Podstawowe bramki logiczne 2 Przerzutniki Przerzutnik SR Rejestry Liczniki 3 Magistrala Sygnały
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
INSTRUKCJA OBSŁUGI CZYTNIKA POSIDRO-DEGA Czytnik jednoosiowy współpracuje z enkoderami inkrementalnymi
 INSTRUKCJA OBSŁUGI CZYTNIKA POSIDRO-DEGA Czytnik jednoosiowy współpracuje z enkoderami inkrementalnymi Dane techniczne 3 Opis złącz 4 6 pin 4 8 pin 4 Uwaga 4 Zastosowanie 4 Obsługa 5 Zerowanie 5 Ustawianie
INSTRUKCJA OBSŁUGI CZYTNIKA POSIDRO-DEGA Czytnik jednoosiowy współpracuje z enkoderami inkrementalnymi Dane techniczne 3 Opis złącz 4 6 pin 4 8 pin 4 Uwaga 4 Zastosowanie 4 Obsługa 5 Zerowanie 5 Ustawianie
Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski
 Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski") Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski Norma IEC 1131 Języki tekstowe Języki graficzne Języki
Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski Norma IEC 1131 Języki tekstowe Języki graficzne Języki
Kurs SIMATIC S7-300/400 i TIA Portal - Zaawansowany. Spis treści. Dzień 1
 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1503) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie nowego projektu I-6 Tworzenie
Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1503) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie nowego projektu I-6 Tworzenie
Politechnika Gdańska. Gdańsk, 2016
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Projekt z przedmiotu Systemy akwizycji i przesyłania informacji. Temat pracy: Licznik binarny zliczający do 10.
 Projekt z przedmiotu Systemy akwizycji i przesyłania informacji Temat pracy: Licznik binarny zliczający do 10. Andrzej Kuś Aleksander Matusz Prowadzący: dr inż. Adam Stadler Układy cyfrowe przetwarzają
Projekt z przedmiotu Systemy akwizycji i przesyłania informacji Temat pracy: Licznik binarny zliczający do 10. Andrzej Kuś Aleksander Matusz Prowadzący: dr inż. Adam Stadler Układy cyfrowe przetwarzają
Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2
 Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci,
Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci,
Standardowe bloki funkcjonalne
 Standardowe bloki funkcjonalne Wykorzystując języki ST i LD należy zapoznać się z działaniem standardowych bloków funkcjonalnych (elementy dwustanowe (bistabilne), elementy detekcji zbocza, liczniki, czasomierze)
Standardowe bloki funkcjonalne Wykorzystując języki ST i LD należy zapoznać się z działaniem standardowych bloków funkcjonalnych (elementy dwustanowe (bistabilne), elementy detekcji zbocza, liczniki, czasomierze)
Automatyzacja i robotyzacja procesów produkcyjnych
 Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Spis treści. Dzień 1. I Rozpoczęcie pracy ze sterownikiem (wersja 1707) II Bloki danych (wersja 1707) ZAAWANSOWANY TIA DLA S7-300/400
 II Bloki danych (wersja 1707) ZAAWANSOWANY TIA DLA S7-300/400") ZAAWANSOWANY TIA DLA S7-300/400 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1707) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie
ZAAWANSOWANY TIA DLA S7-300/400 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1707) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie
MiAcz2. Programowalne systemy przemysłowe automatyki PLC
 MiAcz2 Programowalne systemy przemysłowe automatyki PLC Programowalny sterownik logiczny WEJŚCIA PLC styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony do pamięci WYJŚCIA
MiAcz2 Programowalne systemy przemysłowe automatyki PLC Programowalny sterownik logiczny WEJŚCIA PLC styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony do pamięci WYJŚCIA
Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach
 Marcin Stępniak Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach 1. Informacje Matematyk o nazwisku Bool wymyślił gałąź matematyki do przetwarzania wartości prawda
Marcin Stępniak Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach 1. Informacje Matematyk o nazwisku Bool wymyślił gałąź matematyki do przetwarzania wartości prawda
PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy
 PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy DZIEŃ 1 Idea sterowania procesu lub maszyny: Sterowanie za pomocą przekaźników Sterowanie dedykowane Sterowanie za
PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy DZIEŃ 1 Idea sterowania procesu lub maszyny: Sterowanie za pomocą przekaźników Sterowanie dedykowane Sterowanie za
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
Programowany układ czasowy APSC
 Programowany układ czasowy APSC Ośmiobitowy układ czasowy pracujący w trzech trybach. Wybór trybu realizowany jest przez wartość ładowaną do wewnętrznego rejestru zwanego słowem sterującym. Rejestr ten
Programowany układ czasowy APSC Ośmiobitowy układ czasowy pracujący w trzech trybach. Wybór trybu realizowany jest przez wartość ładowaną do wewnętrznego rejestru zwanego słowem sterującym. Rejestr ten
Programowanie sterowników PLC wprowadzenie
 Programowanie sterowników PLC wprowadzenie Zakład Teorii Maszyn i Automatyki Katedra Podstaw Techniki Felin p.110 http://ztmia.ar.lublin.pl/sips waldemar.samociuk@up.lublin,pl Sterowniki programowalne
Programowanie sterowników PLC wprowadzenie Zakład Teorii Maszyn i Automatyki Katedra Podstaw Techniki Felin p.110 http://ztmia.ar.lublin.pl/sips waldemar.samociuk@up.lublin,pl Sterowniki programowalne
Elastyczne systemy wytwarzania
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium: Elastyczne systemy wytwarzania Załącznik do instrukcji nr 1 Opracował: Jakub Zawrotniak Poniżej przedstawiono sposób tworzenia nowego projektu/programu: a)
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium: Elastyczne systemy wytwarzania Załącznik do instrukcji nr 1 Opracował: Jakub Zawrotniak Poniżej przedstawiono sposób tworzenia nowego projektu/programu: a)
dwójkę liczącą Licznikiem Podział liczników:
 1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
Programowany układ czasowy
 Programowany układ czasowy Zbuduj na płycie testowej ze Spartanem-3A prosty ośmiobitowy układ czasowy pracujący w trzech trybach. Zademonstruj jego działanie na ekranie oscyloskopu. Projekt z Języków Opisu
Programowany układ czasowy Zbuduj na płycie testowej ze Spartanem-3A prosty ośmiobitowy układ czasowy pracujący w trzech trybach. Zademonstruj jego działanie na ekranie oscyloskopu. Projekt z Języków Opisu
Technika mikroprocesorowa I Wykład 2
 Technika mikroprocesorowa I Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci, -odczyt-zapis urządzenia we-wy,
Technika mikroprocesorowa I Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci, -odczyt-zapis urządzenia we-wy,
1. Cel ćwiczenia. Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU.
 1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
Kurs SIMATIC S7-300/400 i TIA Portal - Podstawowy. Spis treści. Dzień 1. I System SIEMENS SIMATIC S7 - wprowadzenie (wersja 1503)
") Spis treści Dzień 1 I System SIEMENS SIMATIC S7 - wprowadzenie (wersja 1503) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6
Spis treści Dzień 1 I System SIEMENS SIMATIC S7 - wprowadzenie (wersja 1503) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6
Odczyt zegara ze sterownika do panelu serii TIU z możliwością korekty ustawień zegara w sterowniku
 Informator Techniczny nr 12 -- styczeń 2001 -- INFORMATOR TECHNICZNY GE FANUC Odczyt zegara ze sterownika do panelu serii TIU z możliwością korekty ustawień zegara w sterowniku Program w sterowniku W sterowniku
Informator Techniczny nr 12 -- styczeń 2001 -- INFORMATOR TECHNICZNY GE FANUC Odczyt zegara ze sterownika do panelu serii TIU z możliwością korekty ustawień zegara w sterowniku Program w sterowniku W sterowniku
Kurs Podstawowy S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
LEKCJA. TEMAT: Funktory logiczne.
 TEMAT: Funktory logiczne. LEKCJA 1. Bramką logiczną (funktorem) nazywa się układ elektroniczny realizujący funkcje logiczne jednej lub wielu zmiennych. Sygnały wejściowe i wyjściowe bramki przyjmują wartość
TEMAT: Funktory logiczne. LEKCJA 1. Bramką logiczną (funktorem) nazywa się układ elektroniczny realizujący funkcje logiczne jednej lub wielu zmiennych. Sygnały wejściowe i wyjściowe bramki przyjmują wartość
ĆWICZENIE 7. Wprowadzenie do funkcji specjalnych sterownika LOGO!
 ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
Zbiór zadań dla sterowników GE-Fanuc serii 90-30/VersaMax/Micro wraz z przykładami rozwiązań
 Zbiór zadań dla sterowników GE-Fanuc serii 90-30/VersaMax/Micro wraz z przykładami rozwiązań Uwaga: Zadania zamieszczone w tym zbiorze można zrealizować używając już najmniejszego sterownika serii VersaMax
Zbiór zadań dla sterowników GE-Fanuc serii 90-30/VersaMax/Micro wraz z przykładami rozwiązań Uwaga: Zadania zamieszczone w tym zbiorze można zrealizować używając już najmniejszego sterownika serii VersaMax
Cyfrowe Elementy Automatyki. Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem
 Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Architektura komputerów. Asembler procesorów rodziny x86
 Architektura komputerów Asembler procesorów rodziny x86 Architektura komputerów Asembler procesorów rodziny x86 Rozkazy mikroprocesora Rozkazy mikroprocesora 8086 można podzielić na siedem funkcjonalnych
Architektura komputerów Asembler procesorów rodziny x86 Architektura komputerów Asembler procesorów rodziny x86 Rozkazy mikroprocesora Rozkazy mikroprocesora 8086 można podzielić na siedem funkcjonalnych
CoDeSys 3 programowanie w języku FBD
 Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
Architektura komputerów Wykład 2
 Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Tranzystor JFET i MOSFET zas. działania
 Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Programowalny sterownik logiczny PLC
 AiS Programowalne układy przemysłowe automatyki Cz.2 (wybrane slajdy) 1 Programowalny sterownik logiczny PLC WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony
AiS Programowalne układy przemysłowe automatyki Cz.2 (wybrane slajdy) 1 Programowalny sterownik logiczny PLC WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony
Struktura i działanie jednostki centralnej
 Struktura i działanie jednostki centralnej ALU Jednostka sterująca Rejestry Zadania procesora: Pobieranie rozkazów; Interpretowanie rozkazów; Pobieranie danych Przetwarzanie danych Zapisywanie danych magistrala
Struktura i działanie jednostki centralnej ALU Jednostka sterująca Rejestry Zadania procesora: Pobieranie rozkazów; Interpretowanie rozkazów; Pobieranie danych Przetwarzanie danych Zapisywanie danych magistrala
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń.
 1.Zasada działania2 Funkcje_logiczne_wejsciowe_i_wyjsciowe_UTXvTR 16.04.09 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1.ZASADA DZIAŁANIA... 2 2. FUNKCJE WEJŚCIOWE... 4 2.1 Zasada
1.Zasada działania2 Funkcje_logiczne_wejsciowe_i_wyjsciowe_UTXvTR 16.04.09 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1.ZASADA DZIAŁANIA... 2 2. FUNKCJE WEJŚCIOWE... 4 2.1 Zasada
2. 10. 1. Schemat drabinkowy... 16 str. 2. 10. 2. Lista instrukcji... 17 str. 3. Opis elementów logicznych oprogramowania MicroWin...
 SPIS TREŚCI 1 Podstawowe wiadomości dotyczące sterowników SIMATIC S7-200 2 str 1 1 Podstawowe dane techniczne sterowników 2 str 1 2 Opis wskaźników stanu 3 str 1 3 Numeracja wejść/wyjść sterownika 4 str
SPIS TREŚCI 1 Podstawowe wiadomości dotyczące sterowników SIMATIC S7-200 2 str 1 1 Podstawowe dane techniczne sterowników 2 str 1 2 Opis wskaźników stanu 3 str 1 3 Numeracja wejść/wyjść sterownika 4 str
GE Fanuc Automation. Sterownik VersaMax Nano i Micro. Sterowniki programowalne. Podręcznik użytkownika
 GE Fanuc Automation Sterowniki programowalne Sterownik VersaMax Nano i Micro Podręcznik użytkownika Znaki ostrzegawcze i uwagi Niebezpieczeństwo Symbolem tym oznaczono w niniejszym podręczniku informacje
GE Fanuc Automation Sterowniki programowalne Sterownik VersaMax Nano i Micro Podręcznik użytkownika Znaki ostrzegawcze i uwagi Niebezpieczeństwo Symbolem tym oznaczono w niniejszym podręczniku informacje
Systemy wbudowane. Wprowadzenie. Nazwa. Oznaczenia. Zygmunt Kubiak. Sterowniki PLC - Wprowadzenie do programowania (1)
") ybrane funkcje logiczne prowadzenie L L2 Y Nazwa Oznaczenia Y Sterowniki PLC - prowadzenie do programowania () Proste przykłady Załączenie jednego z dwóch (lub obu) przełączników lub powoduje zapalenie
ybrane funkcje logiczne prowadzenie L L2 Y Nazwa Oznaczenia Y Sterowniki PLC - prowadzenie do programowania () Proste przykłady Załączenie jednego z dwóch (lub obu) przełączników lub powoduje zapalenie
Ćwiczenie 3 - Sterownik PLC realizacja algorytmu PID
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie KATEDRA AUTOMATYKI LABORATORIUM Aparatura Automatyzacji Ćwiczenie 3. Sterownik PLC realizacja algorytmu PID Wydział EAIiE kierunek AiR rok
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie KATEDRA AUTOMATYKI LABORATORIUM Aparatura Automatyzacji Ćwiczenie 3. Sterownik PLC realizacja algorytmu PID Wydział EAIiE kierunek AiR rok
PROGRAMOWANIE Z LICZNIKIEM CYKLI
 PRz AiS - 2012 UKŁADY CZASOWE Programowanie z licznikiem cykli. Fala prostokątna. Standardowe czasomierze. Fala prostokątna w LD. Zabezpieczenie silnika. Drugie naciśnięcie. Minimalne układy z czasomierzami.
PRz AiS - 2012 UKŁADY CZASOWE Programowanie z licznikiem cykli. Fala prostokątna. Standardowe czasomierze. Fala prostokątna w LD. Zabezpieczenie silnika. Drugie naciśnięcie. Minimalne układy z czasomierzami.
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń.
 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1. ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...5 3. FUNKCJE WYJŚCIOWE...6 4. FUNKCJE LOGICZNE...9 Zabezpieczenie : ZSN 5U od: v. 1.0
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1. ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...5 3. FUNKCJE WYJŚCIOWE...6 4. FUNKCJE LOGICZNE...9 Zabezpieczenie : ZSN 5U od: v. 1.0
Instrukcja programu Symulator! -(S)-
-") Instrukcja programu Symulator! -(S)- Opracował: Jarosław Tarnawski 2016 na podstawie oryginalnej instrukcji obsługi z 2000 r. Zawartość Wstęp... 2 Zakres symulacji i konfiguracja wirtualnego sterownika...
Instrukcja programu Symulator! -(S)- Opracował: Jarosław Tarnawski 2016 na podstawie oryginalnej instrukcji obsługi z 2000 r. Zawartość Wstęp... 2 Zakres symulacji i konfiguracja wirtualnego sterownika...
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne
 Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Synchronizowanie czasu kontrolera PACSystems do urządzeń HMI
 Synchronizowanie czasu kontrolera PACSystems do urządzeń HMI SYNCHRONIZOWANIE CZASU KONTROLERA DO OPROGRAMOWANIA INTOUCH, PANELU OPERATORSKIEGO QUICKPANEL+ LUB ASTRAADA HMI Informacje ogólne Kontrolery
Synchronizowanie czasu kontrolera PACSystems do urządzeń HMI SYNCHRONIZOWANIE CZASU KONTROLERA DO OPROGRAMOWANIA INTOUCH, PANELU OPERATORSKIEGO QUICKPANEL+ LUB ASTRAADA HMI Informacje ogólne Kontrolery
Instrukcja pomocnicza TELMATIK do licznika / timera H8DA
 www.telmatik.pl Instrukcja pomocnicza TELMATIK do licznika / timera H8DA Wielo-funkcyjne urządzenie H8DA może pracować jako licznik impulsów albo przekaźnik czasowy ( timer ). Poza wyborem rodzaju pracy,
www.telmatik.pl Instrukcja pomocnicza TELMATIK do licznika / timera H8DA Wielo-funkcyjne urządzenie H8DA może pracować jako licznik impulsów albo przekaźnik czasowy ( timer ). Poza wyborem rodzaju pracy,
Podstawy programowania w języku C i C++
 Podstawy programowania w języku C i C++ Część czwarta Operatory i wyrażenia Autor Roman Simiński Kontakt roman.siminski@us.edu.pl www.us.edu.pl/~siminski Niniejsze opracowanie zawiera skrót treści wykładu,
Podstawy programowania w języku C i C++ Część czwarta Operatory i wyrażenia Autor Roman Simiński Kontakt roman.siminski@us.edu.pl www.us.edu.pl/~siminski Niniejsze opracowanie zawiera skrót treści wykładu,
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur. Piotr Fita
 Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur Piotr Fita Elektronika cyfrowa i analogowa Układy analogowe - przetwarzanie sygnałów, których wartości zmieniają się w sposób ciągły w pewnym zakresie
Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur Piotr Fita Elektronika cyfrowa i analogowa Układy analogowe - przetwarzanie sygnałów, których wartości zmieniają się w sposób ciągły w pewnym zakresie
Układy czasowo/licznikowe Współpraca sterownika PLC ze środowiskiem symulatora procesów PLC SIM 2
 GRUPA MT Temat i Autor Układy czasowo/licznikowe Współpraca sterownika PLC ze środowiskiem symulatora procesów PLC SIM 2 Arkadiusz Domoracki, Krzysztof Bodzek, Grzegorz Jarek CEL ĆWICZENIA 1. Zasada działania
GRUPA MT Temat i Autor Układy czasowo/licznikowe Współpraca sterownika PLC ze środowiskiem symulatora procesów PLC SIM 2 Arkadiusz Domoracki, Krzysztof Bodzek, Grzegorz Jarek CEL ĆWICZENIA 1. Zasada działania
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
KOMPUTERY W STEROWANIU. Ćwiczenie 8 Zasady programowania sterownika PLC Modicon Micro. Podstawowe instrukcje języka drabinkowego Modsoft
 Wydział Elektryczny Zespół Automatyki (ZTMAiPC) KOMPUTERY W STEROWANIU Ćwiczenie 8 Zasady programowania sterownika PLC Modicon Micro. Podstawowe instrukcje języka drabinkowego Modsoft 1. Cel ćwiczenia
Wydział Elektryczny Zespół Automatyki (ZTMAiPC) KOMPUTERY W STEROWANIU Ćwiczenie 8 Zasady programowania sterownika PLC Modicon Micro. Podstawowe instrukcje języka drabinkowego Modsoft 1. Cel ćwiczenia
LICZNIKI Liczniki scalone serii 749x
 LABOATOIUM PODSTAWY ELEKTONIKI LICZNIKI Liczniki scalone serii 749x Cel ćwiczenia Zapoznanie się z budową i zasadą działania liczników synchronicznych i asynchronicznych. Poznanie liczników dodających
LABOATOIUM PODSTAWY ELEKTONIKI LICZNIKI Liczniki scalone serii 749x Cel ćwiczenia Zapoznanie się z budową i zasadą działania liczników synchronicznych i asynchronicznych. Poznanie liczników dodających
Dr inż. Grażyna KRUPIŃSKA. D-10 pokój 227 WYKŁAD 7 WSTĘP DO INFORMATYKI
 Dr inż. Grażyna KRUPIŃSKA Grazyna.Krupinska@fis.agh.edu.pl D-10 pokój 227 WYKŁAD 7 WSTĘP DO INFORMATYKI Wyrażenia 2 Wyrażenia w języku C są bardziej elastyczne niż wyrażenia w jakimkolwiek innym języku
Dr inż. Grażyna KRUPIŃSKA Grazyna.Krupinska@fis.agh.edu.pl D-10 pokój 227 WYKŁAD 7 WSTĘP DO INFORMATYKI Wyrażenia 2 Wyrażenia w języku C są bardziej elastyczne niż wyrażenia w jakimkolwiek innym języku
MOŻLIWOŚCI PROGRAMOWE MIKROPROCESORÓW
 MOŻLIWOŚCI PROGRAMOWE MIKROPROCESORÓW Projektowanie urządzeń cyfrowych przy użyciu układów TTL polegało na opracowaniu algorytmu i odpowiednim doborze i zestawieniu układów realizujących różnorodne funkcje
MOŻLIWOŚCI PROGRAMOWE MIKROPROCESORÓW Projektowanie urządzeń cyfrowych przy użyciu układów TTL polegało na opracowaniu algorytmu i odpowiednim doborze i zestawieniu układów realizujących różnorodne funkcje
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń.
 Funkcje_logiczne_wejsciowe_i_wyjsciowe_UTXvL 15.01.10 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. Spis treści 1.ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...4 2.1.Zasada działania...4
Funkcje_logiczne_wejsciowe_i_wyjsciowe_UTXvL 15.01.10 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. Spis treści 1.ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...4 2.1.Zasada działania...4
ZASOBY ZMIENNYCH W STEROWNIKACH SAIA-BURGESS
 ZASOBY ZMIENNYCH W STEROWNIKACH SAIA-BURGESS Autorzy Wydanie Data : : : Zespół SABUR Sp. z o.o. 3.00 Sierpień 2013 2013 SABUR Sp. z o. o. Wszelkie prawa zastrzeżone Bez pisemnej zgody firmy SABUR Sp. z
ZASOBY ZMIENNYCH W STEROWNIKACH SAIA-BURGESS Autorzy Wydanie Data : : : Zespół SABUR Sp. z o.o. 3.00 Sierpień 2013 2013 SABUR Sp. z o. o. Wszelkie prawa zastrzeżone Bez pisemnej zgody firmy SABUR Sp. z
Programowalne układy logiczne
 Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
CYFROWE UKŁADY SCALONE STOSOWANE W AUTOMATYCE
 Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 5 str. 1/16 ĆWICZENIE 5 CYFROWE UKŁADY SCALONE STOSOWANE W AUTOMATYCE 1.CEL ĆWICZENIA: zapoznanie się z podstawowymi elementami cyfrowymi oraz z
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 5 str. 1/16 ĆWICZENIE 5 CYFROWE UKŁADY SCALONE STOSOWANE W AUTOMATYCE 1.CEL ĆWICZENIA: zapoznanie się z podstawowymi elementami cyfrowymi oraz z
SPIS TREŚCI: 1. Podział funkcji o działaniu szybkim... 2 str. 2. Instrukcje przerwań programowych... 2 str.
 SPIS TREŚCI: 1. Podział funkcji o działaniu szybkim... 2 str. 2. Instrukcje przerwań programowych... 2 str. 2. 1. Funkcje sterujące obsługą przerwań programowych... 5 str. 3. Szybkie liczniki - HSC...
SPIS TREŚCI: 1. Podział funkcji o działaniu szybkim... 2 str. 2. Instrukcje przerwań programowych... 2 str. 2. 1. Funkcje sterujące obsługą przerwań programowych... 5 str. 3. Szybkie liczniki - HSC...
LICZNIKI PODZIAŁ I PARAMETRY
 LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
1. Język programowania STL... 2 str. 2. Pojęcie stosu... 3 str Funkcja ładuj - LD... 4 str Iloczyn i suma logiczna - AND/OR... 4 str.
 S P I S T R E Ś C I 1 Język programowania STL 2 str 2 Pojęcie stosu 3 str 2 1 Funkcja ładuj - LD 4 str 2 2 Iloczyn i suma logiczna - AND/OR 4 str 2 3 Funkcja ALD oraz OLD 5 str 2 4 Funkcja przyporządkowania
S P I S T R E Ś C I 1 Język programowania STL 2 str 2 Pojęcie stosu 3 str 2 1 Funkcja ładuj - LD 4 str 2 2 Iloczyn i suma logiczna - AND/OR 4 str 2 3 Funkcja ALD oraz OLD 5 str 2 4 Funkcja przyporządkowania
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Inż. Kamil Kujawski Inż. Krzysztof Krefta. Wykład w ramach zajęć Akademia ETI
 Inż. Kamil Kujawski Inż. Krzysztof Krefta Wykład w ramach zajęć Akademia ETI Metody programowania Assembler Język C BASCOM Assembler kod maszynowy Zalety: Najbardziej efektywny Intencje programisty są
Inż. Kamil Kujawski Inż. Krzysztof Krefta Wykład w ramach zajęć Akademia ETI Metody programowania Assembler Język C BASCOM Assembler kod maszynowy Zalety: Najbardziej efektywny Intencje programisty są
Podstawy elektroniki cz. 2 Wykład 2
 Podstawy elektroniki cz. 2 Wykład 2 Elementarne prawa Trzy elementarne prawa 2 Prawo Ohma Stosunek natężenia prądu płynącego przez przewodnik do napięcia pomiędzy jego końcami jest stały R U I 3 Prawo
Podstawy elektroniki cz. 2 Wykład 2 Elementarne prawa Trzy elementarne prawa 2 Prawo Ohma Stosunek natężenia prądu płynącego przez przewodnik do napięcia pomiędzy jego końcami jest stały R U I 3 Prawo
S P I S T R E Ś C I. 1. Język programowania STL... 2 str. 2. Pojęcie stosu... 5 str.
 V - LISTA INSTRUKCJI STL S P I S T R E Ś C I 1 Język programowania STL 2 str 2 Pojęcie stosu 5 str 2 1 Funkcja ładuj - LD 6 str 2 2 Iloczyn i suma logiczna - AND/OR 7 str 2 3 Funkcja ALD oraz OLD 8 str
V - LISTA INSTRUKCJI STL S P I S T R E Ś C I 1 Język programowania STL 2 str 2 Pojęcie stosu 5 str 2 1 Funkcja ładuj - LD 6 str 2 2 Iloczyn i suma logiczna - AND/OR 7 str 2 3 Funkcja ALD oraz OLD 8 str
microplc Opis funkcji sterownika swobodnie programowalnego
 Opis funkcji sterownika swobodnie programowalnego microplc V1.06 01.06.2009 1 1.WPROWADZENIE DO PROGRAMOWANIA microplc 4 Zasady programowanie drabinkowego.... 9 2.FUNKCJE PODSTAWOWE 10 -- -- Rozpoczęcie
Opis funkcji sterownika swobodnie programowalnego microplc V1.06 01.06.2009 1 1.WPROWADZENIE DO PROGRAMOWANIA microplc 4 Zasady programowanie drabinkowego.... 9 2.FUNKCJE PODSTAWOWE 10 -- -- Rozpoczęcie
1. Poznanie właściwości i zasady działania rejestrów przesuwnych. 2. Poznanie właściwości i zasady działania liczników pierścieniowych.
 Ćwiczenie 9 Rejestry przesuwne i liczniki pierścieniowe. Cel. Poznanie właściwości i zasady działania rejestrów przesuwnych.. Poznanie właściwości i zasady działania liczników pierścieniowych. Wprowadzenie.
Ćwiczenie 9 Rejestry przesuwne i liczniki pierścieniowe. Cel. Poznanie właściwości i zasady działania rejestrów przesuwnych.. Poznanie właściwości i zasady działania liczników pierścieniowych. Wprowadzenie.
Pracownia elektryczna i elektroniczna. Elektronika cyfrowa. Ćwiczenie nr 5.
 Pracownia elektryczna i elektroniczna. Elektronika cyfrowa. Ćwiczenie nr 5. Klasa III Opracuj projekt realizacji prac związanych z badaniem działania cyfrowych bloków arytmetycznych realizujących operacje
Pracownia elektryczna i elektroniczna. Elektronika cyfrowa. Ćwiczenie nr 5. Klasa III Opracuj projekt realizacji prac związanych z badaniem działania cyfrowych bloków arytmetycznych realizujących operacje