5. Regulacja częstotliwościowa prędkości obrotowej silnika indukcyjnego klatkowego
|
|
|
- Filip Janicki
- 9 lat temu
- Przeglądów:
Transkrypt
1 5. Regulacja czętotlwoścowa pędkośc obotowej lnka ndukcyjnego klatkowego 5.1 Zaada egulacj czętotlwoścowej - waunk optymalzacj tatycznej; 5.2 Regulacja kalana pędkośc obotowej ( U/f); 5.3 Regulacja wektoowa pędkośc obotowej 5.4 Metoda bezpośednego teowana momentem tumenem (DTC); Falownk napęca z ezytoem hamowana

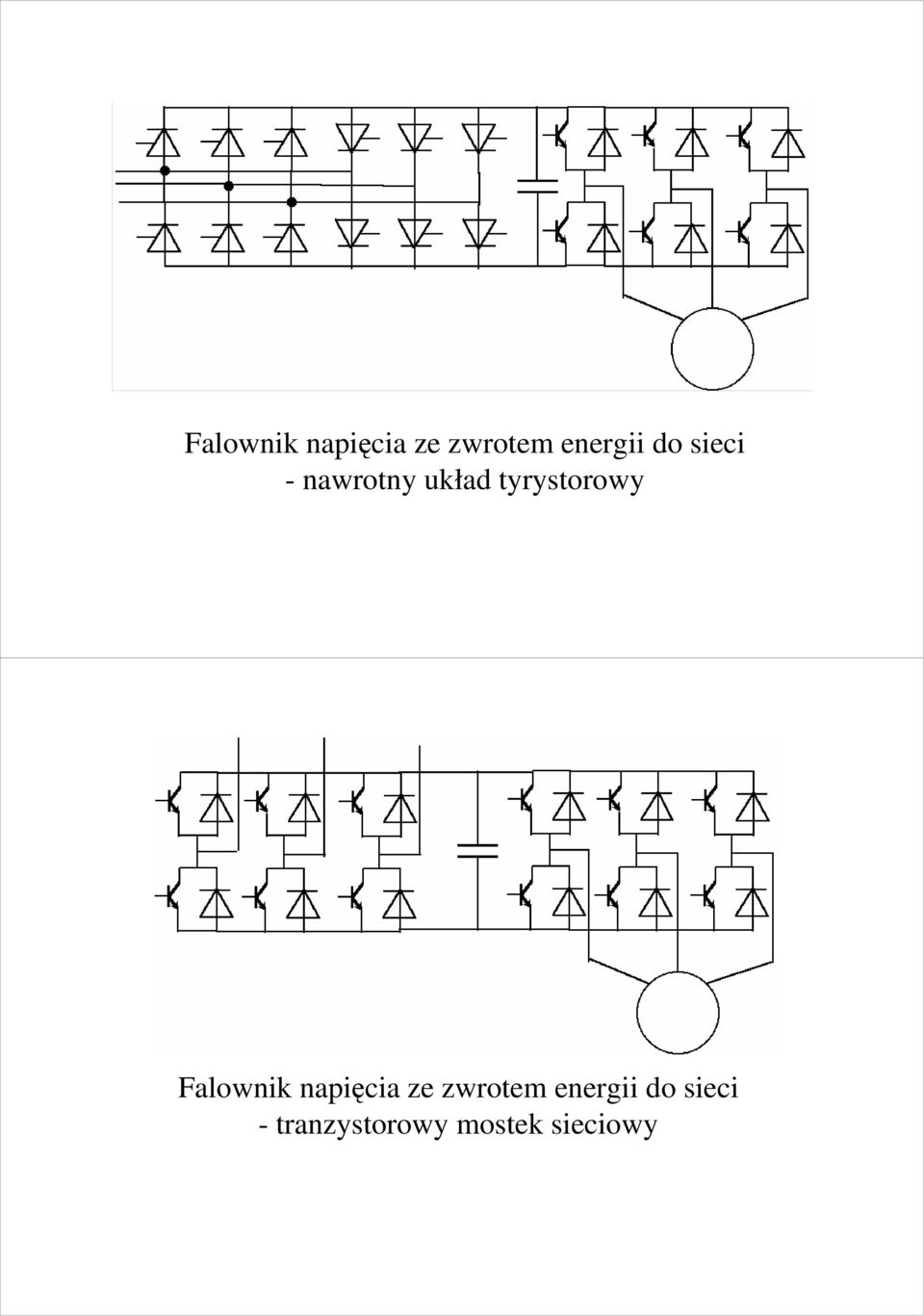
2 Falownk napęca ze zwotem eneg do ec - nawotny układ tyytoowy Falownk napęca ze zwotem eneg do ec - tanzytoowy motek ecowy
3 Chaakteytyka mechanczna lnka klatkowego z zaznaczonym zakeam pacy Zwązek napęca z czętotlwoścą Dla małych f ==> I U/R Ψ=/R*U ==> U=Ψ*R/ = k1 Dla duŝych f ==> I U/ω Ψ=U/ω ==> U=Ψ* ω = k2*f

4 Pzykładowy zetaw chaakteytyk tatycznych teowana lnka klatkowego 1,,8,6 u f -,24,24 u = RwR w f ( f n) 2 2 Rw w [ f R ( f n) R ] w ( f n) 2 w 2 2 w,4 Gdze: w = w 2 M,2 wyznacznk eaktancj mazyny aynchoncznej -1, -,8 -,6 -,4 -,2,2,4,6,8 1, Kedy lnk pacuje na dealnym begu jałowym R u = f 1 f Paktyczne toowana chaakteytyka teowana lnka ndukcyjnego klatkowego u f = u u = R

5 Chaakteytyk mechanczne lnka klatkowego pzy óŝnych czętotlwoścach zalana Schemat układu kalanej egulacj pędkośc lnka ndukcyjnego klatkowego wg zaady U/f = cont. (bez egulacj pądu)

6 Chaakteytyk mechanczne lnka Pzy napęcu zalana 4V Pzy zatoowanu chaakteytyk U/f=cont. (wdocznej ponŝej) Wzó na pąd tojan w funkcj pulacj wnka S = x w ω ω
 Wzó na pąd tojan w")
7 Pzykładowe pzebeg chaakteytyk f ( ω ) S = dla Ψ = Ψ = 1 R S R Metoda pośednego teowana tumena lnka klatkowego z uwzględnenem pądu

8 Steowane kalane U/f=cont. ozuch kok momentu opoowego Steowne kalane U/f=cont. ozuch bez ampy Steowne kalane U/f=cont. ozuch z ampą 1

9 Steowane kalane z egulacją pądu ozuch kok momentu opoowego Slnk Indukcyjny Klatkowy Steowane Skalane Op matematyczny lnka ndukcyjnego klatkowego

10 - ównana napęcowe obwodu tojana wnka u u k k = = k k d dt d dt Ψ Ψ k k - ównana tumenowo-pądowe jω Ψ j k ( ω ω ) Ψ k k k m Ψ Ψ k k = = k k M M k k - ównane uchu d ω dt m = 1 T M [ m m ] e o - ównane momentu elektomagnetycznego { } * m e = Im Ψ k k JΩ p M N gdze: M =, T b N = = δ δ M M,.
![k k - ównane uchu d ω dt m = 1 T M [ m m ] e o - ównane momentu](/docs-images/52/15009517/images/page_10.jpg "elektomagnetycznego { } * m e = Im Ψ k k JΩ p M N gdze: M =, T b N = =")
11 Slnk Indukcyjny klatkowy Steowane wektoowe Wyke wektoowy zmennych tanu lnka we wpółzędnych polowych x y = α = coγ α Ψ n γ Ψ β β n γ Ψ coγ Ψ Ilutacja kalanej egulacj momentu lnka (odpowedź na kok watośc zadanej)

12 Ilutacja wektoowej egulacj momentu lnka (odpowedź na kok watośc zadanej) d T M - 1 m op ψ q 1 T T M X - T M 1 ω m e T M ω Ry. Schemat tuktualny lnka ndukcyjnego klatkowego teowanego pądowo we wpółzędnych d,q.

13 Stuktua układu bezpośednego teowana polowo zoentowanego pzy wymuzenu pądowym z hteezowym egulatoam pądu

14 Układ teowana wektoowego IFOC Poównane dynamk metod kalanej wektoowej

15 Steowane wektoowe ozuch kok momentu opoowego Rozuch nawót hamowane pzy teowanu kalanym z bezpośednm teowanem tumena Rozuch nawót hamowane pzy teowanu wektoowym

16 Wektoowa epezentacja napęca wyjścowego falownka: a) upozczony chemat falownka zalającego lnk, b) połoŝene wektoów napęca β γ (3) γ (2) u 3 u 1 u 4 ψ u 6 γ (1) γ (4) ψ α 2H ψ γ (5) γ (6) Ry. Wybó wektoa napęca wyjścowego falownka w zaleŝnośc od połoŝena tumena tojana

17 Układ bezpośednego teowana momentu tumena (DTC) lnka klatkowego zalanego z falownka napęca Tabela elekcj wektoa napęca wyjścowego falownka d ψ d m γ (1) γ (2) γ (3) γ (4) γ (5) γ (6) 1 1 u 2 u 3 u 4 u 5 u 6 u 1 u u 7 u u 7 u u 7-1 u 6 u 1 u 2 u 3 u 4 u 5 1 u 3 u 4 u 5 u 6 u 1 u 2 u 7 u u 7 u u 7 u -1 u 5 u 6 u 1 u 2 u 3 u 4

18 Ry. Pędkość lnka klatkowego podcza nawotu z 25ad/ do - 25ad/ pzy tadycyjnym teowanu wektoowym DFOC. Ry Pądy fazowe lnka klatkowego podcza nawotu z 25ad/ do - 25ad/ pzy tadycyjnym teowanu wektoowym DFOC Ry Moment lnka klatkowego podcza nawotu z 25ad/ do - 25ad/ pzy tadycyjnym teowanu wektoowym DFOC. Ry Składowaβ tumena tojana lnka klatkowego podcza nawotu z 25ad/ do - 25ad/ pzy tadycyjnym teowanu wektoowym DFOC Ry Moment elektomagnetyczny lnka klatkowego podcza zmany kokowej watośc momentu zadanego z 1Nm do 1Nm, pzy tadycyjnym teowanu wektoowym DFOC Ry Stumeń tojana lnka we wpółzędnych αβ podcza zmany kokowej watośc momentu zadanego z 1Nm do 1Nm, pzy klaycznym teowanu DTC Uab [V] t [] Ry Pądy fazowe a, b, c lnka podcza zmany kokowej watośc momentu zadanego z 1Nm do 1Nm, pzy klaycznym teowanu DTC.. Ry Napęce pzewodowe Uab tojana lnka klatkowego podcza zmany kokowej watośc momentu zadanego z 1Nm do 1Nm, pzy tadycyjnym teowanu wektoowym DFOC.

5. Regulacja częstotliwościowa prędkości obrotowej silnika indukcyjnego klatkowego
 5. egulacja czętotlwoścowa pędkośc obotowej lnka ndukcyjnego klatkowego 5.1 Zaada egulacj czętotlwoścowej - waunk optymalzacj tatycznej; 5. egulacja kalana pędkośc obotowej ( U/f); 5.3 egulacja wektoowa
5. egulacja czętotlwoścowa pędkośc obotowej lnka ndukcyjnego klatkowego 5.1 Zaada egulacj czętotlwoścowej - waunk optymalzacj tatycznej; 5. egulacja kalana pędkośc obotowej ( U/f); 5.3 egulacja wektoowa
Sterowanie prędkością silnika krokowego z zastosowaniem mikrokontrolera ATmega8
 mg inż. ŁUKASZ BĄCZEK d hab. inż. ZYGFRYD GŁOWACZ pof. ndzw. w AGH Akademia Góniczo-Hutnicza Wydział Elektotechniki, Automatyki, Infomatyki i Elektoniki Kateda Mazyn Elektycznych Steowanie pędkością ilnika
mg inż. ŁUKASZ BĄCZEK d hab. inż. ZYGFRYD GŁOWACZ pof. ndzw. w AGH Akademia Góniczo-Hutnicza Wydział Elektotechniki, Automatyki, Infomatyki i Elektoniki Kateda Mazyn Elektycznych Steowanie pędkością ilnika

WPŁYW POJEMNOŚCI KONDENSATORA PRACY JEDNOFAZOWEGO SILNIKA INDUKCYJNEGO Z POMOCNICZYM UZWOJENIEM KONDENSATOROWYM NA PROCES ROZRUCHU
 Pace Nakowe Instytt Maszyn, Napędów Pomaów Elektycznych N 63 Poltechnk Wocławskej N 63 Stda Mateały N 29 2009 Kzysztof MAKOWSKI*, Macn WIK* mkoslnk, jednofazowe, ndkcyjne, kondensatoowe, modelowane obwodowe,
Pace Nakowe Instytt Maszyn, Napędów Pomaów Elektycznych N 63 Poltechnk Wocławskej N 63 Stda Mateały N 29 2009 Kzysztof MAKOWSKI*, Macn WIK* mkoslnk, jednofazowe, ndkcyjne, kondensatoowe, modelowane obwodowe,
BADANIE SILNIKA WYKONAWCZEGO PRĄDU STAŁEGO
 LABORATORIUM ELEKTRONIKI I ELEKTROTECHNIKI BADANIE SILNIKA WYKONAWCZEGO PRĄDU STAŁEGO Opacował: d inŝ. Aleksande Patyk 1.Cel i zakes ćwiczenia. Celem ćwiczenia jest zapoznanie się z budową, właściwościami
LABORATORIUM ELEKTRONIKI I ELEKTROTECHNIKI BADANIE SILNIKA WYKONAWCZEGO PRĄDU STAŁEGO Opacował: d inŝ. Aleksande Patyk 1.Cel i zakes ćwiczenia. Celem ćwiczenia jest zapoznanie się z budową, właściwościami
STEROWANIE WG. ZASADY U/f = const
 STEROWANIE WG. ZASADY U/f = cont Rozruch bezpośredni ilnika aynchronicznego (bez układu regulacji, odpowiedź na kok wartości zadanej napięcia zailania) Duży i niekontrolowany prąd przy rozruchu Ocylacje
STEROWANIE WG. ZASADY U/f = cont Rozruch bezpośredni ilnika aynchronicznego (bez układu regulacji, odpowiedź na kok wartości zadanej napięcia zailania) Duży i niekontrolowany prąd przy rozruchu Ocylacje
SK-7 Wprowadzenie do metody wektorów przestrzennych SK-8 Wektorowy model silnika indukcyjnego, klatkowego
 Ćwiczenia: SK-7 Wpowadzenie do metody wektoów pzetzennych SK-8 Wektoowy model ilnika indukcyjnego, klatkowego Wpowadzenie teoetyczne Wekto pzetzenny definicja i poawowe zależności. Dowolne wielkości kalane,
Ćwiczenia: SK-7 Wpowadzenie do metody wektoów pzetzennych SK-8 Wektoowy model ilnika indukcyjnego, klatkowego Wpowadzenie teoetyczne Wekto pzetzenny definicja i poawowe zależności. Dowolne wielkości kalane,
Praca i energia. x jest. x i W Y K Ł A D 5. 6-1 Praca i energia kinetyczna. Ruch jednowymiarowy pod działaniem stałych sił.
 ykład z fzyk. Pot Pomykewcz 40 Y K Ł A D 5 Pa enega. Pa enega odgywają waŝną olę zaówno w fzyce jak w codzennym Ŝycu. fzyce ła wykonuje konketną pacę, jeŝel dzała ona na pzedmot ma kładową wzdłuŝ pzemezczena
ykład z fzyk. Pot Pomykewcz 40 Y K Ł A D 5 Pa enega. Pa enega odgywają waŝną olę zaówno w fzyce jak w codzennym Ŝycu. fzyce ła wykonuje konketną pacę, jeŝel dzała ona na pzedmot ma kładową wzdłuŝ pzemezczena
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA PODSTAWY TEORETYCZNE
 SILNIK INDUKCYJNY SEROWANY Z WEKOROWEGO FALOWNIKA NAPIĘCIA PODSAWY EOREYCZNE 1. Poawowe cele teowana wektoowego lnka ndukcyjnego klatkowego Cągła kontola wzajemnego położena zmennych wektoowych pzetzennych
SILNIK INDUKCYJNY SEROWANY Z WEKOROWEGO FALOWNIKA NAPIĘCIA PODSAWY EOREYCZNE 1. Poawowe cele teowana wektoowego lnka ndukcyjnego klatkowego Cągła kontola wzajemnego położena zmennych wektoowych pzetzennych

Ryszard Goleman. Szybkoobrotowe hybrydowe silniki indukcyjne zasilane bezpośrednio z sieci 50 Hz
 Ryza Goleman Szybkoobotowe hybyowe lnk nukcyjne zalane bezpośeno z ec 5 Hz ubln 13 Szybkoobotowe hybyowe lnk nukcyjne zalane bezpośeno z ec 5 Hz Monogafe Poltechnka ubelka Poltechnka ubelka Wyzał Elektotechnk
Ryza Goleman Szybkoobotowe hybyowe lnk nukcyjne zalane bezpośeno z ec 5 Hz ubln 13 Szybkoobotowe hybyowe lnk nukcyjne zalane bezpośeno z ec 5 Hz Monogafe Poltechnka ubelka Poltechnka ubelka Wyzał Elektotechnk
MAGISTERSKA PRACA DYPLOMOWA
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH MAGISTERSKA PRACA DYPLOMOWA Układy teowania pędkością kątową ilników aynchonicznych w zeokim zakeie egulacji
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH MAGISTERSKA PRACA DYPLOMOWA Układy teowania pędkością kątową ilników aynchonicznych w zeokim zakeie egulacji
Energia potencjalna jest energią zgromadzoną w układzie. Energia potencjalna może być zmieniona w inną formę energii (na przykład energię kinetyczną)
") 1 Enega potencjalna jest enegą zgomadzoną w układze. Enega potencjalna może być zmenona w nną omę eneg (na pzykład enegę knetyczną) może być wykozystana do wykonana pacy. Sumę eneg potencjalnej knetycznej
1 Enega potencjalna jest enegą zgomadzoną w układze. Enega potencjalna może być zmenona w nną omę eneg (na pzykład enegę knetyczną) może być wykozystana do wykonana pacy. Sumę eneg potencjalnej knetycznej
Układ kaskadowy silnika indukcyjnego pierścieniowego na stałą moc
 Ćwiczenie 14 Układ kakadowy ilnika indukcyjnego ieścieniowego na tałą moc 14.1. Pogam ćwiczenia 1. Poznanie tuktuy układu omiaowego, budowy i właściwości naędowych kakady zawoowo-mazynowej tyu P = cont.
Ćwiczenie 14 Układ kakadowy ilnika indukcyjnego ieścieniowego na tałą moc 14.1. Pogam ćwiczenia 1. Poznanie tuktuy układu omiaowego, budowy i właściwości naędowych kakady zawoowo-mazynowej tyu P = cont.
[ ] D r ( ) ( ) ( ) POLE ELEKTRYCZNE
![[ ] D r ( ) ( ) ( ) POLE ELEKTRYCZNE](/thumbs/27/9941466.jpg "[ ] D r ( ) ( ) ( ) POLE ELEKTRYCZNE") LKTYCZNOŚĆ Pole elektcne Lne sł pola elektcnego Pawo Gaussa Dpol elektcn Pole elektcne w delektkach Pawo Gaussa w delektkach Polaacja elektcna Potencjał pola elektcnego Bewowość pola elektcnego óŝnckowa
LKTYCZNOŚĆ Pole elektcne Lne sł pola elektcnego Pawo Gaussa Dpol elektcn Pole elektcne w delektkach Pawo Gaussa w delektkach Polaacja elektcna Potencjał pola elektcnego Bewowość pola elektcnego óŝnckowa
OKREŚLANIE WARTOŚCI MOMENTU STATYCZNEGO DLA STANU NIERUCHOMEGO WAŁU SILNIKA INDUKCYJNEGO W PRZEKSZTAŁTNIKOWYM UKŁADZIE NAPĘDOWYM DŹWIGU
 Zeszyty Poblemowe Maszyny Elektyczne N 75/6 15 Jan Anuszczyk, Maiusz Jabłoński Politechnika Łódzka, Łódź OKREŚLANE WARTOŚC MOMENTU STATYCZNEGO DLA STANU NERUCHOMEGO WAŁU SLNKA NDUKCYJNEGO W PRZEKSZTAŁTNKOWYM
Zeszyty Poblemowe Maszyny Elektyczne N 75/6 15 Jan Anuszczyk, Maiusz Jabłoński Politechnika Łódzka, Łódź OKREŚLANE WARTOŚC MOMENTU STATYCZNEGO DLA STANU NERUCHOMEGO WAŁU SLNKA NDUKCYJNEGO W PRZEKSZTAŁTNKOWYM
Właściwości napędowe pięciofazowego silnika indukcyjnego klatkowego
 XV konferencja naukowo-technczna o charakterze szkolenowym AUTOMATYKA, ELEKTRYKA, ZAKŁÓCENA 24-26.05.2017, Jurata Współorganzatorzy: Poltechnka Gdańska, Zarząd Portu Port Gdyna SA, SPE/O Gdańsk Właścwośc
XV konferencja naukowo-technczna o charakterze szkolenowym AUTOMATYKA, ELEKTRYKA, ZAKŁÓCENA 24-26.05.2017, Jurata Współorganzatorzy: Poltechnka Gdańska, Zarząd Portu Port Gdyna SA, SPE/O Gdańsk Właścwośc
Dwufazowe silniki wykonawcze (DSW):
:") Dwfazowe lnk wykonawcze (DSW): -- Bdowa: Slnk kłada ę z dwóch zwoeń toana pzenętych względem ebe pod kątem potym. Naczęśce ą to dentyczne zwoena, z któych edno pełn olę zwoena wzbdzene a dge zwoena teącego.
Dwfazowe lnk wykonawcze (DSW): -- Bdowa: Slnk kłada ę z dwóch zwoeń toana pzenętych względem ebe pod kątem potym. Naczęśce ą to dentyczne zwoena, z któych edno pełn olę zwoena wzbdzene a dge zwoena teącego.
Laboratorium. Sterowanie napędami elektrycznymi zagadnienia wybrane
 POLITECHNIKA WROCŁAWSKA INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH ZAKŁAD NAPĘDU ELEKTRYCZNEGO, MECHATRONIKI I AUTOMATYKI PRZEMYSŁOWEJ Laboratorium Sterowanie napędami elektrycznymi zagadnienia
POLITECHNIKA WROCŁAWSKA INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH ZAKŁAD NAPĘDU ELEKTRYCZNEGO, MECHATRONIKI I AUTOMATYKI PRZEMYSŁOWEJ Laboratorium Sterowanie napędami elektrycznymi zagadnienia
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia
 Ćwiczenie 13 Układ napędowy z ilnikiem indukcyjnym i falownikiem napięcia 3.1. Program ćwiczenia 1. Zapoznanie ię ze terowaniem prędkością ilnika klatkowego przez zmianę czętotliwości napięcia zailającego..
Ćwiczenie 13 Układ napędowy z ilnikiem indukcyjnym i falownikiem napięcia 3.1. Program ćwiczenia 1. Zapoznanie ię ze terowaniem prędkością ilnika klatkowego przez zmianę czętotliwości napięcia zailającego..
MASZYNA ASYNCHRONICZNA 1. Oblicz sprawność silnika dla warunków znamionowych przy zadanej mocy strat i mocy znamionowej. Pmech
 MAYA AYCHOCA. Oblcz pawość lka dla wauków zaoowych pzy zadaej ocy tat ocy zaoowej. ech η η el ech ech. Jak a podtawe ocy zaoowej zaoowej pędkośc oblcza ę zaoowy oet lka? η 60 60 η 9,55 η 3. Wyzacz pawość
MAYA AYCHOCA. Oblcz pawość lka dla wauków zaoowych pzy zadaej ocy tat ocy zaoowej. ech η η el ech ech. Jak a podtawe ocy zaoowej zaoowej pędkośc oblcza ę zaoowy oet lka? η 60 60 η 9,55 η 3. Wyzacz pawość
Kondensatory. Definicja pojemności przewodnika: C = q V. stosunek!adunku wprowadzonego na przewodnik do wytworzonego potencja!u.
 Kondensatoy Defncja pojemnośc pzewodnka: stosunek!adunku wpowadzonego na pzewodnk do wytwozonego potencja!u. -6 - Jednostka: faad, F, µ F F, pf F Kondensato: uk!ad co najmnej dwóch pzewodnków, pzedzelonych
Kondensatoy Defncja pojemnośc pzewodnka: stosunek!adunku wpowadzonego na pzewodnk do wytwozonego potencja!u. -6 - Jednostka: faad, F, µ F F, pf F Kondensato: uk!ad co najmnej dwóch pzewodnków, pzedzelonych
WZMACNIACZ OPERACYJNY. Podstawowe właściwości wzmacniaczy operacyjnych. Rodzaj wzmacniacza Rezystancja wejściowa Rezystancja wyjściowa
 WZMACNIACZ OPEACYJNY kłady aktywne ze wzmacniaczami operacyjnymi... Podstawowe właściwości wzmacniaczy operacyjnych odzaj wzmacniacza ezystancja wejściowa ezystancja wyjściowa Bipolarny FET MOS-FET Idealny
WZMACNIACZ OPEACYJNY kłady aktywne ze wzmacniaczami operacyjnymi... Podstawowe właściwości wzmacniaczy operacyjnych odzaj wzmacniacza ezystancja wejściowa ezystancja wyjściowa Bipolarny FET MOS-FET Idealny
OPTYMALIZACJA PRZETWARZANIA ENERGII DLA MAŁYCH ELEKTROWNI WODNYCH Z GENERATORAMI PRACUJĄCYMI ZE ZMIENNĄ PRĘDKOŚCIĄ OBROTOWĄ
 Zezyty oblemowe Mazyny Elektyczne N 9/ Daiuz Bokowki, Tomaz Węgiel olitechnika Kakowka OTYMALZACJA RZETWARZANA ENERG DLA MAŁYC ELEKTROWN WODNYC Z GENERATORAM RACUJĄCYM ZE ZMENNĄ RĘDKOŚCĄ OBROTOWĄ ENERGY
Zezyty oblemowe Mazyny Elektyczne N 9/ Daiuz Bokowki, Tomaz Węgiel olitechnika Kakowka OTYMALZACJA RZETWARZANA ENERG DLA MAŁYC ELEKTROWN WODNYC Z GENERATORAM RACUJĄCYM ZE ZMENNĄ RĘDKOŚCĄ OBROTOWĄ ENERGY
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA
 SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
Marcin KAMIŃSKI, Mateusz DYBKOWSKI
 Macn KAMIŃSKI, Mateuz DYBKOWSKI Poltechnka Wocławka, Intytut Mazyn, apędów Pomaów Elektycznych Analza układu bezczujnkowego wektoowego teowana lnkem ndukcyjnym z etymatoem MRAS CC z neuonowym mechanzmem
Macn KAMIŃSKI, Mateuz DYBKOWSKI Poltechnka Wocławka, Intytut Mazyn, apędów Pomaów Elektycznych Analza układu bezczujnkowego wektoowego teowana lnkem ndukcyjnym z etymatoem MRAS CC z neuonowym mechanzmem
dr inż. Dariusz ŚWIERCZYŃSKI e-mail: swierczd@isep.pw.edu.pl dr inż. Marcin ŻELECHOWSKI e-mail: zelechom @isep.pw.edu.pl
 Dariuz ŚWIERCZYŃSKI Marcin ŻELECHOWSKI 621.313.8.016.1-52 621.313.333.016.1-52 UNIWERSALNA STRUKTURA BEZPOŚREDNIEGO STEROWANIA MOMENTEM I STRUMIENIEM DLA SILNIKÓW SYNCHRONICZNYCH O MAGNESACH TRWAŁYCH ORAZ
Dariuz ŚWIERCZYŃSKI Marcin ŻELECHOWSKI 621.313.8.016.1-52 621.313.333.016.1-52 UNIWERSALNA STRUKTURA BEZPOŚREDNIEGO STEROWANIA MOMENTEM I STRUMIENIEM DLA SILNIKÓW SYNCHRONICZNYCH O MAGNESACH TRWAŁYCH ORAZ
SEKCJA AUTOMATYKI, ELEKTROTECHNIKI, BIOCYBERNETYKI I TELEKOMUNIKACJI
 I SESJA STUENCKICH KÓŁ NAUKOWYCH PIONU HUTNICZEGO AKAEII GÓRNICZO - HUTNICZEJ I. STANISŁAWA STASICA W KRAKOWIE SEKCJA AUTOATYKI, ELEKTROTECHNIKI, BIOCYBERNETYKI I TELEKOUNIKACJI Koła naukowe: AGNESIK,
I SESJA STUENCKICH KÓŁ NAUKOWYCH PIONU HUTNICZEGO AKAEII GÓRNICZO - HUTNICZEJ I. STANISŁAWA STASICA W KRAKOWIE SEKCJA AUTOATYKI, ELEKTROTECHNIKI, BIOCYBERNETYKI I TELEKOUNIKACJI Koła naukowe: AGNESIK,
REZONATORY DIELEKTRYCZNE
 REZONATORY DIELEKTRYCZNE Rezonato dielektyczny twozy małostatny, niemetalizowany dielektyk o dużej pzenikalności elektycznej ( > 0) i dobej stabilności tempeatuowej, zwykle w kształcie cylindycznych dysków
REZONATORY DIELEKTRYCZNE Rezonato dielektyczny twozy małostatny, niemetalizowany dielektyk o dużej pzenikalności elektycznej ( > 0) i dobej stabilności tempeatuowej, zwykle w kształcie cylindycznych dysków
PRZYCZYNY I SKUTKI ZMIENNOŚCI PARAMETRÓW MASZYN INDUKCYJNYCH
 LV SESJA STUENCKICH KÓŁ NAUKOWYCH PRZYCZYNY I SKUTKI ZMIENNOŚCI PARAMETRÓW MASZYN INUKCYJNYCH Wykonali: Michał Góki, V ok Elektotechnika Maciej Boba, V ok Elektotechnika Oiekun naukowy efeatu: d hab. inż.
LV SESJA STUENCKICH KÓŁ NAUKOWYCH PRZYCZYNY I SKUTKI ZMIENNOŚCI PARAMETRÓW MASZYN INUKCYJNYCH Wykonali: Michał Góki, V ok Elektotechnika Maciej Boba, V ok Elektotechnika Oiekun naukowy efeatu: d hab. inż.
( ) ( ) s = 5. s 2s. Krzysztof Oprzędkiewicz Kraków r. Podstawy Automatyki Zadania do części rachunkowej
 ( ) s = 5. s 2s. Krzysztof Oprzędkiewicz Kraków r. Podstawy Automatyki Zadania do części rachunkowej") Kzyztof Opzędiewicz Kaów 09 0 0. Zajęcia : (ba zadań-wpowadzenie) Zajęcia : (ba zadań wyłącznie część laboatoyjna) Podtawy Automatyi Zadania do części achunowej Zajęcia : Chaateytyi czaowe podtawowych
Kzyztof Opzędiewicz Kaów 09 0 0. Zajęcia : (ba zadań-wpowadzenie) Zajęcia : (ba zadań wyłącznie część laboatoyjna) Podtawy Automatyi Zadania do części achunowej Zajęcia : Chaateytyi czaowe podtawowych
BUDOWA I ZASADA DZIAŁANIA MASZYN ASYNCHRONICZNYCH. l pod wpływem indukcji magnetycznej B) pojawi się napięcie indukowane:
 pojawi się napięcie indukowane:") BUDOWA I ZASADA DZIAŁANIA MASZYN ASYNCHRONICZNYCH Zaada działania mazyny indukcyjnej (aynchronicznej) opiera ię na zjawikach, które wytępują w przypadku, gdy pole magnetyczne poruza ię względem przewodnika
BUDOWA I ZASADA DZIAŁANIA MASZYN ASYNCHRONICZNYCH Zaada działania mazyny indukcyjnej (aynchronicznej) opiera ię na zjawikach, które wytępują w przypadku, gdy pole magnetyczne poruza ię względem przewodnika
STEROWANIE AUTONOMICZNYM GENERATOREM INDUKCYJNYM ZE WZBUDZENIEM PRZEKSZTAŁTNIKOWYM
 Zezyty Poblemowe Mazyny Elektyczne N 88/2010 123 BłaŜej Jakubowki, Kzyztof Pieńkowki Politechnika Wocławka STEROWANIE AUTONOMICZNYM GENERATOREM INDUKCYJNYM ZE WZBUDZENIEM PRZEKSZTAŁTNIKOWYM CONTROL OF
Zezyty Poblemowe Mazyny Elektyczne N 88/2010 123 BłaŜej Jakubowki, Kzyztof Pieńkowki Politechnika Wocławka STEROWANIE AUTONOMICZNYM GENERATOREM INDUKCYJNYM ZE WZBUDZENIEM PRZEKSZTAŁTNIKOWYM CONTROL OF
! ( + !! (#!! #, (#) % )! % % #. /") =>?.
=>?. Zeszyty Problemowe Maszyny Elektryczne Nr 75/ NOWY, NIELINIOWY REGULATOR PRĄDU A DYNAMIKA KSZTAŁTOWANIA MOMENTU SILNIKA INDUKCYJNEGO
 Zezyty Problemowe Mazyny Elektryczne Nr 75/2006 31 Adam Ruzczyk, Andrzej Sikorki Politechnika Białotocka, Białytok NOWY, NIELINIOWY REGULATOR PRĄDU A DYNAMIKA KSZTAŁTOWANIA MOMENTU SILNIKA INDUKCYJNEGO
Zezyty Problemowe Mazyny Elektryczne Nr 75/2006 31 Adam Ruzczyk, Andrzej Sikorki Politechnika Białotocka, Białytok NOWY, NIELINIOWY REGULATOR PRĄDU A DYNAMIKA KSZTAŁTOWANIA MOMENTU SILNIKA INDUKCYJNEGO
BADANIE SILNIKA INDUKCYJNEGO STEROWANEGO Z FALOWNIKA NAPIĘCIA
 BADANIE SILNIKA INDUKCYJNEGO SEROWANEGO Z FALOWNIKA NAPIĘCIA 1. Wprowadzenie Silni inducyjny należy do grupy mazyn aynchronicznych, tzn. taich, w tórych prędość wirnia jet różna od prędości wirowania pola
BADANIE SILNIKA INDUKCYJNEGO SEROWANEGO Z FALOWNIKA NAPIĘCIA 1. Wprowadzenie Silni inducyjny należy do grupy mazyn aynchronicznych, tzn. taich, w tórych prędość wirnia jet różna od prędości wirowania pola
Badanie trójfazowych maszyn indukcyjnych: silnik klatkowy, silnik pierścieniowy
 Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych CięŜkich PW Laboratorium Elektrotechniki i Elektroniki Ćwiczenie M2 protokół Badanie trójfazowych maszyn indukcyjnych: silnik klatkowy, silnik pierścieniowy
Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych CięŜkich PW Laboratorium Elektrotechniki i Elektroniki Ćwiczenie M2 protokół Badanie trójfazowych maszyn indukcyjnych: silnik klatkowy, silnik pierścieniowy
WPŁYW ASYMETRII SZCZELINY POWIETRZNEJ NA WARTOŚĆ NAPIĘĆ I PRĄDÓW WAŁOWYCH W SILNIKACH INDUKCYJNYCH DUśEJ MOCY
 Zezyty Poblemowe Mazyny Elektyczne N 81/29 73 Boniław Dak, Piot Zientek, Roman Nietój, Andzej Boboń Politechnika Śląka, Gliwice Józef Kwak, Zabzańkie Zakłady Mechaniczne, Zabze Jan Maek Lipińki, Zakład
Zezyty Poblemowe Mazyny Elektyczne N 81/29 73 Boniław Dak, Piot Zientek, Roman Nietój, Andzej Boboń Politechnika Śląka, Gliwice Józef Kwak, Zabzańkie Zakłady Mechaniczne, Zabze Jan Maek Lipińki, Zakład
Zeszyty Naukowe Wydziału Elektrotechniki i Automatyki Politechniki Gdańskiej
 Zezyty Naukowe Wydzału Elektotechnk Automatyk Poltechnk Gdańkej XVII Semnaum ZASTOSOWANIE KOPUTERÓW W NAUCE I TECHNICE 2007 Oddzał Gdańk PTETS Refeat n 5 WPŁYW SKOSU śłobków WIRNIKA SILNIKA KLATKOWEGO
Zezyty Naukowe Wydzału Elektotechnk Automatyk Poltechnk Gdańkej XVII Semnaum ZASTOSOWANIE KOPUTERÓW W NAUCE I TECHNICE 2007 Oddzał Gdańk PTETS Refeat n 5 WPŁYW SKOSU śłobków WIRNIKA SILNIKA KLATKOWEGO
WYKRYWANIE USZKODZEŃ UZWOJENIA WIRNIKA PRZEKSZTAŁTNIKOWEGO UKŁADU NAPĘDOWEGO Z SILNIKIEM INDUKCYJNYM
 Zezyty Polemowe Mazyny Elektyczne N 87/2 79 oet Wiezicki, Czeław T. Kowalki Politechnika Wocławka WYKYWANIE USZKODZEŃ UZWOJENIA WINIKA PZEKSZTAŁTNIKOWEGO UKŁADU NAPĘDOWEGO Z SILNIKIEM INDUKCYJNYM OTO FAULT
Zezyty Polemowe Mazyny Elektyczne N 87/2 79 oet Wiezicki, Czeław T. Kowalki Politechnika Wocławka WYKYWANIE USZKODZEŃ UZWOJENIA WINIKA PZEKSZTAŁTNIKOWEGO UKŁADU NAPĘDOWEGO Z SILNIKIEM INDUKCYJNYM OTO FAULT
Zeszyty Problemowe Maszyny Elektryczne Nr 75/2006 47
 ezyty Problemowe Mazyny Elektryczne Nr 75006 47 Maria J. ielińka Wojciech G. ielińki Politechnika Lubelka Lublin POŚLIGOWA HARAKTERYSTYKA ADMITANJI STOJANA SILNIKA INDUKYJNEGO UYSKANA PRY ASTOSOWANIU SYMULAJI
ezyty Problemowe Mazyny Elektryczne Nr 75006 47 Maria J. ielińka Wojciech G. ielińki Politechnika Lubelka Lublin POŚLIGOWA HARAKTERYSTYKA ADMITANJI STOJANA SILNIKA INDUKYJNEGO UYSKANA PRY ASTOSOWANIU SYMULAJI
POLITECHNIKA WARSZAWSKA WYDZIAŁ SAMOCHODÓW I MASZYN ROBOCZYCH Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 POLITECHNIKA WARSZAWSKA WYDZIAŁ SAMOCHODÓW I MASZYN ROBOCZYCH Intytut Podtaw Budowy Mazyn Zakład Mechaniki Laboratorium podtaw automatyki i teorii mazyn Intrukcja do ćwiczenia A-5 Badanie układu terowania
POLITECHNIKA WARSZAWSKA WYDZIAŁ SAMOCHODÓW I MASZYN ROBOCZYCH Intytut Podtaw Budowy Mazyn Zakład Mechaniki Laboratorium podtaw automatyki i teorii mazyn Intrukcja do ćwiczenia A-5 Badanie układu terowania
T =, { :p { A:B C , A:C. p } C }
 ÐØ ÖÒ ØÝÛÒ ÐÓ ÓÑÒ Ñ ½ Ï Ý Ð ÝÞÒ ÐÓ ÓÑÒ Ñ T =, { :p p } ½º Þ Ñ Ö ÖÓÞ Þ ÖÞ ¾ Ì ÓÖ T= {A}, ÈÖÞÝ ½ E = Th({A, B})º { A:B C ¾º Ö Ô ÑÓÒÓØÓÒ ÞÒÓ B } Ñ ÒÓÖÓÞ Þ ÖÞ Ò Ì ÓÖ T = {A}, { A:B C Ñ ÒÓÖÓÞ Þ ÖÞ Ò E Ó ÑÝ
ÐØ ÖÒ ØÝÛÒ ÐÓ ÓÑÒ Ñ ½ Ï Ý Ð ÝÞÒ ÐÓ ÓÑÒ Ñ T =, { :p p } ½º Þ Ñ Ö ÖÓÞ Þ ÖÞ ¾ Ì ÓÖ T= {A}, ÈÖÞÝ ½ E = Th({A, B})º { A:B C ¾º Ö Ô ÑÓÒÓØÓÒ ÞÒÓ B } Ñ ÒÓÖÓÞ Þ ÖÞ Ò Ì ÓÖ T = {A}, { A:B C Ñ ÒÓÖÓÞ Þ ÖÞ Ò E Ó ÑÝ
Pole magnetyczne prąd elektryczny
 Pole magnetyczne pąd elektyczny Czy pole magnetyczne może wytwazać pąd elektyczny? Piewsze ekspeymenty dawały zawsze wynik negatywny. Powód: statyczny układ magnesów. Michał Faaday piewszy zauważył, że
Pole magnetyczne pąd elektyczny Czy pole magnetyczne może wytwazać pąd elektyczny? Piewsze ekspeymenty dawały zawsze wynik negatywny. Powód: statyczny układ magnesów. Michał Faaday piewszy zauważył, że
BEZCZUJNIKOWY UKŁAD WEKTOROWEGO STEROWANIA SILNIKIEM INDUKCYJNYM KLATKOWYM METODĄ FDC
 Prace Naukowe Instytutu Maszyn, Napędów Pomarów Elektrycznych Nr 6 Poltechnk Wrocławskej Nr 6 Studa Materały Nr 8 8 Krzysztof P. DYRCZ* slnk ndukcyjny, napęd bezczujnkowy, estymacja zmennych stanu, sterowane
Prace Naukowe Instytutu Maszyn, Napędów Pomarów Elektrycznych Nr 6 Poltechnk Wrocławskej Nr 6 Studa Materały Nr 8 8 Krzysztof P. DYRCZ* slnk ndukcyjny, napęd bezczujnkowy, estymacja zmennych stanu, sterowane
Predykcyjny algorytm sterowania przekształtnikiem zasilającym silnik synchroniczny z magnesami trwałymi
 Rafał GRODZKI Politechnika Białotocka, Katedra Energoelektroniki i Napędów Elektrycznych Predykcyjny algorytm terowania przekztałtnikiem zailającym ilnik ynchroniczny z magneami trwałymi Strezczenie. W
Rafał GRODZKI Politechnika Białotocka, Katedra Energoelektroniki i Napędów Elektrycznych Predykcyjny algorytm terowania przekztałtnikiem zailającym ilnik ynchroniczny z magneami trwałymi Strezczenie. W
ROZRUCH I REGULACJA PRĘDKOŚCI OBROTOWEJ SILNIKA INDUKCYJNEGO PIERŚCIENIOWEGO
 Rozruch i regulacja obrotów silnika pierścieniowego 1 z 8 PRACOWNIA ENERGOELEKTRONICZNA w ZST Radom 2006/2007 ROZRUCH I REGULACJA PRĘDKOŚCI OBROTOWEJ SILNIKA INDUKCYJNEGO PIERŚCIENIOWEGO Przed wykonaniem
Rozruch i regulacja obrotów silnika pierścieniowego 1 z 8 PRACOWNIA ENERGOELEKTRONICZNA w ZST Radom 2006/2007 ROZRUCH I REGULACJA PRĘDKOŚCI OBROTOWEJ SILNIKA INDUKCYJNEGO PIERŚCIENIOWEGO Przed wykonaniem
Ćwiczenie 2 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy
Zadanie 1. Podaj model matematyczny układu jak na rysunku: a) w postaci transmitancji, b) w postaci równań stanu (równań różniczkowych).
 w postaci transmitancji, b) w postaci równań stanu (równań różniczkowych).") Zadanie Podaj model matematyczny uładu ja na ryunu: a w potaci tranmitancji, b w potaci równań tanu równań różniczowych. a ranmitancja operatorowa LC C b ównania tanu uładu di dt i A B du c u c dt i u
Zadanie Podaj model matematyczny uładu ja na ryunu: a w potaci tranmitancji, b w potaci równań tanu równań różniczowych. a ranmitancja operatorowa LC C b ównania tanu uładu di dt i A B du c u c dt i u
Na skutek takiego przemieszcznia ładunku, energia potencjalna układu pole-ładunek zmienia się o:
 E 0 Na ładunek 0 znajdujący się w polu elektycznym o natężeniu E działa siła elektostatyczna: F E 0 Paca na pzemieszczenie ładunku 0 o ds wykonana pzez pole elektyczne: dw Fds 0E ds Na skutek takiego pzemieszcznia
E 0 Na ładunek 0 znajdujący się w polu elektycznym o natężeniu E działa siła elektostatyczna: F E 0 Paca na pzemieszczenie ładunku 0 o ds wykonana pzez pole elektyczne: dw Fds 0E ds Na skutek takiego pzemieszcznia
SILNIK INDUKCYJNY KLATOWY STEROWANY ZE SKALARNEGO FALOWNIKA NAPIĘCIA
 SILNIK INDUKCYJNY KLATOWY STEROWANY ZE SKALARNEGO FALOWNIKA NAPIĘCIA 1. odel matematyczny ilnika indkcyjnego Do opi tanów dynamicznych ilników klatkowych toowana jet powzechnie metoda zepolonych wektorów
SILNIK INDUKCYJNY KLATOWY STEROWANY ZE SKALARNEGO FALOWNIKA NAPIĘCIA 1. odel matematyczny ilnika indkcyjnego Do opi tanów dynamicznych ilników klatkowych toowana jet powzechnie metoda zepolonych wektorów
SCHEMATY ZASTĘPCZE LINII ELEKTROENERGETYCZNYCH. bśr. 0,02415 log r
 EEOEEEYA - ĆWICZEIA PZEYŁ I OZDZIAŁ EEII EEYCZEJ Przemysław aaka Instytut Eektroenergetyki ud. A11, p. 508, V p. (OiE e-mai: przemysaw.taaka@wp.p www.i15.p.odz.p/~przemekt onsutacje: wtorki, godz. 14.15
EEOEEEYA - ĆWICZEIA PZEYŁ I OZDZIAŁ EEII EEYCZEJ Przemysław aaka Instytut Eektroenergetyki ud. A11, p. 508, V p. (OiE e-mai: przemysaw.taaka@wp.p www.i15.p.odz.p/~przemekt onsutacje: wtorki, godz. 14.15
WYZNACZANIE MODUŁU SPRĘŻYSTOŚCI POSTACIOWEJ G ORAZ NAPRĘŻEŃ SKRĘCAJĄCYCH METODĄ TENSOMETRYCZNĄ
 Ćwiczenie 7 WYZNACZANIE ODUŁU SPRĘŻYSTOŚCI POSTACIOWEJ G ORAZ NAPRĘŻEŃ SKRĘCAJĄCYCH ETODĄ TENSOETRYCZNĄ A. PRĘT O PRZEKROJU KOŁOWY 7. WPROWADZENIE W pręcie o przekroju kołowym, poddanym obciążeniu momentem
Ćwiczenie 7 WYZNACZANIE ODUŁU SPRĘŻYSTOŚCI POSTACIOWEJ G ORAZ NAPRĘŻEŃ SKRĘCAJĄCYCH ETODĄ TENSOETRYCZNĄ A. PRĘT O PRZEKROJU KOŁOWY 7. WPROWADZENIE W pręcie o przekroju kołowym, poddanym obciążeniu momentem

Streszczenie rozprawy doktorskiej
 Stezczenie ozpawy doktokiej tytuł: Analiza ważliwości aynchonicznych napędów takcyjnych teowanych wektoowo na zmiany paametów auto: mg inż. Rafał Nowak pomoto: d hab. inż. Andzej Dębowki, pof. PŁ Łódź
Stezczenie ozpawy doktokiej tytuł: Analiza ważliwości aynchonicznych napędów takcyjnych teowanych wektoowo na zmiany paametów auto: mg inż. Rafał Nowak pomoto: d hab. inż. Andzej Dębowki, pof. PŁ Łódź
Politechnika Wrocławska Instytut Maszyn, Napędów i Pomiarów Elektrycznych. Materiał ilustracyjny do przedmiotu. (Cz. 2)
") Poltechnka Wrocławska nstytut Maszyn, Napędów Pomarów Elektrycznych Materał lustracyjny do przedmotu EEKTOTEHNKA (z. ) Prowadzący: Dr nż. Potr Zelńsk (-9, A10 p.408, tel. 30-3 9) Wrocław 005/6 PĄD ZMENNY
Poltechnka Wrocławska nstytut Maszyn, Napędów Pomarów Elektrycznych Materał lustracyjny do przedmotu EEKTOTEHNKA (z. ) Prowadzący: Dr nż. Potr Zelńsk (-9, A10 p.408, tel. 30-3 9) Wrocław 005/6 PĄD ZMENNY
Zadanie 1. Liczba szkód w każdym z trzech kolejnych lat dla pewnego ubezpieczonego ma rozkład równomierny:
 Matematyka ubezpieczeń majątkowych 5.2.2008 r. Zadanie. Liczba szkód w każdym z trzech kolejnych lat dla pewnego ubezpieczonego ma rozkład równomierny: Pr ( N = k) = 0 dla k = 0,, K, 9. Liczby szkód w
Matematyka ubezpieczeń majątkowych 5.2.2008 r. Zadanie. Liczba szkód w każdym z trzech kolejnych lat dla pewnego ubezpieczonego ma rozkład równomierny: Pr ( N = k) = 0 dla k = 0,, K, 9. Liczby szkód w
Wykład 15 Elektrostatyka
 Wykład 5 Elektostatyka Obecne wadome są cztey fundamentalne oddzaływana: slne, elektomagnetyczne, słabe gawtacyjne. Slne słabe oddzaływana odgywają decydującą ole w budowe jąde atomowych cząstek elementanych.
Wykład 5 Elektostatyka Obecne wadome są cztey fundamentalne oddzaływana: slne, elektomagnetyczne, słabe gawtacyjne. Slne słabe oddzaływana odgywają decydującą ole w budowe jąde atomowych cząstek elementanych.
CHARAKTERYSTYKI I STEROWANIE SILNIKA INDUKCYJNEGO Z DWOMA UZWOJENIAMI STOJANA
 Zeszyty Problemowe Maszyny Elektryczne Nr 8/9 95 Krzysztof Pieńkowski Politechnika Wrocławska, Wrocław CHARAKTERYSTYKI I STEROWANIE SILNIKA INDUKCYJNEGO Z DWOMA UZWOJENIAMI STOJANA CHARACTERISTICS AND
Zeszyty Problemowe Maszyny Elektryczne Nr 8/9 95 Krzysztof Pieńkowski Politechnika Wrocławska, Wrocław CHARAKTERYSTYKI I STEROWANIE SILNIKA INDUKCYJNEGO Z DWOMA UZWOJENIAMI STOJANA CHARACTERISTICS AND
IDENTYFIKACJA PARAMETRÓW SILNIKA INDUKCYJNEGO W STANIE ZATRZYMANYM ZA POMOCĄ ALGORYTMU EWOLUCYJNEGO
 Pace aukowe Intytutu Mazyn, apędów Pomaów Elektycznych 56 Poltechnk Wocławkej 56 Studa Mateały 4 004 eea ORŁOWSKA-KOWALSKA *, Joanna LIS * Slnk ndukcyjny, dentyfkacja paametów, algoytmy ewolucyjne, poceoy
Pace aukowe Intytutu Mazyn, apędów Pomaów Elektycznych 56 Poltechnk Wocławkej 56 Studa Mateały 4 004 eea ORŁOWSKA-KOWALSKA *, Joanna LIS * Slnk ndukcyjny, dentyfkacja paametów, algoytmy ewolucyjne, poceoy
BADANIA SYMULACYJNE BEZCZUJNIKOWEGO UKŁADU STEROWANIA SILNIKIEM INDUKCYJNYM KLATKOWYM Z WYKORZYSTANIEM METODY FDC
 Prace Naukowe Instytutu Maszyn, Napędów Pomarów Elektrycznych Nr 59 Poltechnk Wrocławskej Nr 59 Studa Materały Nr 6 6 Napęd bezczujnkowy, slnk ndukcyjny, estymacja zmennych stanu, sterowane FDC. * Krzysztof
Prace Naukowe Instytutu Maszyn, Napędów Pomarów Elektrycznych Nr 59 Poltechnk Wrocławskej Nr 59 Studa Materały Nr 6 6 Napęd bezczujnkowy, slnk ndukcyjny, estymacja zmennych stanu, sterowane FDC. * Krzysztof
Fizyka 7. Janusz Andrzejewski
 Fzyka 7 Janusz Andzejewsk Poblem: Dlaczego begacze na stadone muszą statować z óżnych mejsc wbegu na 400m? Janusz Andzejewsk Ruch obotowy Cało sztywne Cało, któe obaca sę w tak sposób, że wszystke jego
Fzyka 7 Janusz Andzejewsk Poblem: Dlaczego begacze na stadone muszą statować z óżnych mejsc wbegu na 400m? Janusz Andzejewsk Ruch obotowy Cało sztywne Cało, któe obaca sę w tak sposób, że wszystke jego
Płatew dachowa. Kombinacje przypadków obciążeń ustala się na podstawie wzoru. γ Gi G ki ) γ Q Q k. + γ Qi Q ki ψ ( i ) G ki - obciążenia stałe
 γ Q Q k. + γ Qi Q ki ψ ( i ) G ki - obciążenia stałe") Płatew dachowa Przyjęcie schematu statycznego: - belka wolnopodparta - w halach posadowionych na szkodach górniczych lub w przypadkach, w których przewiduje się nierównomierne osiadanie układów poprzecznych
Płatew dachowa Przyjęcie schematu statycznego: - belka wolnopodparta - w halach posadowionych na szkodach górniczych lub w przypadkach, w których przewiduje się nierównomierne osiadanie układów poprzecznych
Elektrotechnika i elektronika
 Elektrotechnika i elektronika Metalurgia, Inżynieria Materiałowa II rok Silnik indukcyjny (aynchroniczny) Materiały do wykładów Katedra Automatyki Napędu i Urządzeń Przemyłowych AGH Kraków 2004 1. Wtęp
Elektrotechnika i elektronika Metalurgia, Inżynieria Materiałowa II rok Silnik indukcyjny (aynchroniczny) Materiały do wykładów Katedra Automatyki Napędu i Urządzeń Przemyłowych AGH Kraków 2004 1. Wtęp
PROGRAM W ŚRODOWISKU LABVIEW DO POMIARU I OBLICZEŃ W LABORATORIUM MASZYN ELEKTRYCZNYCH
 XLIII SESJA STUDENCKICH KÓŁ NAUKOWYCH PROGRAM W ŚRODOWISKU LABVIEW DO POMIARU I OBLICZEŃ W LABORATORIUM MASZYN ELEKTRYCZNYCH Wykonali: Michał Górski, III rok Elektrotechnika Maciej Boba, III rok Elektrotechnika
XLIII SESJA STUDENCKICH KÓŁ NAUKOWYCH PROGRAM W ŚRODOWISKU LABVIEW DO POMIARU I OBLICZEŃ W LABORATORIUM MASZYN ELEKTRYCZNYCH Wykonali: Michał Górski, III rok Elektrotechnika Maciej Boba, III rok Elektrotechnika
STEROWANIE STRUMIENIEM Z MODULACJĄ WEKTOROWĄ
 Paweł WÓJCIK STEROWANIE STRUMIENIEM Z MODULACJĄ WEKTOROWĄ STRESZCZENIE W tym artykule zotało przedtawione terowanie wektorowe bazujące na regulacji momentu poprzez modulację uchybu trumienia tojana. Opiana
Paweł WÓJCIK STEROWANIE STRUMIENIEM Z MODULACJĄ WEKTOROWĄ STRESZCZENIE W tym artykule zotało przedtawione terowanie wektorowe bazujące na regulacji momentu poprzez modulację uchybu trumienia tojana. Opiana
LABORATORIUM Z AUTOMATYKI NAPĘDU ELEKTRYCZNEGO
 Intytut Mazyn, Napędów i Pomiarów Elektrycznych Politechniki Wrocławkiej ZAKŁAD NAPĘDÓW ELEKTRYCZNYCH LABORATORIUM Z AUTOMATYKI NAPĘDU ELEKTRYCZNEGO Bezpośrednie terowanie momentem ilnika indukcyjnego
Intytut Mazyn, Napędów i Pomiarów Elektrycznych Politechniki Wrocławkiej ZAKŁAD NAPĘDÓW ELEKTRYCZNYCH LABORATORIUM Z AUTOMATYKI NAPĘDU ELEKTRYCZNEGO Bezpośrednie terowanie momentem ilnika indukcyjnego
XXXVII OLIMPIADA FIZYCZNA ETAP III Zadanie doświadczalne
 XXXVII OIMPIADA FIZYCZNA ETAP III Zadanie doświadczalne ZADANIE D Nazwa zadania: Obacający się pęt swobodnie Długi cienki pęt obaca się swobodnie wokół ustalonej pionowej osi, postopadłej do niego yc.
XXXVII OIMPIADA FIZYCZNA ETAP III Zadanie doświadczalne ZADANIE D Nazwa zadania: Obacający się pęt swobodnie Długi cienki pęt obaca się swobodnie wokół ustalonej pionowej osi, postopadłej do niego yc.
SPRAWNOŚĆ MAKSYMALNA INDUKCYJNEGO SILNIKA PIERŚCIENIOWEGO
 Zezyty oleowe Mazyny Elektyczne N 9/11 139 Henyk Banach oltechnka Luelka SRAWNOŚĆ MAKSYMALNA NDUKCYJNEGO SLNKA ERŚCENOWEGO MAXMAL EFFCENCY OF AN NDUCTON SL-RNG MOTOR Atact: Th atcle peent condeaton on
Zezyty oleowe Mazyny Elektyczne N 9/11 139 Henyk Banach oltechnka Luelka SRAWNOŚĆ MAKSYMALNA NDUKCYJNEGO SLNKA ERŚCENOWEGO MAXMAL EFFCENCY OF AN NDUCTON SL-RNG MOTOR Atact: Th atcle peent condeaton on
WPŁYW USZKODZENIA TRANZYSTORA IGBT PRZEKSZTAŁTNIKA CZĘSTOTLIWOŚCI NA PRACĘ NAPĘDU INDUKCYJNEGO
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 69 Politechniki Wrocławskiej Nr 69 Studia i Materiały Nr 33 2013 Kamil KLIMKOWSKI*, Mateusz DYBKOWSKI* DTC-SVM, DFOC, silnik indukcyjny,
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 69 Politechniki Wrocławskiej Nr 69 Studia i Materiały Nr 33 2013 Kamil KLIMKOWSKI*, Mateusz DYBKOWSKI* DTC-SVM, DFOC, silnik indukcyjny,
F : R 0;1 rozkład prawdopodobieństwa stopy zwrotu.
 Nie gaussowskie kyteia zaządzania potfelem Kyteia dominacji stochastycznej stopa zwotu C 0 C0 0, C ;, 0 t C C : R 0;1 ozkład pawdopodobieństwa stopy zwotu 0 U : R R funkcja użyteczności watości stopy zwotu
Nie gaussowskie kyteia zaządzania potfelem Kyteia dominacji stochastycznej stopa zwotu C 0 C0 0, C ;, 0 t C C : R 0;1 ozkład pawdopodobieństwa stopy zwotu 0 U : R R funkcja użyteczności watości stopy zwotu
MIERNICTWO WIELKOŚCI ELEKTRYCZNYCH I NIEELEKTRYCZNYCH
 Politechnika Białostocka Wydział Elektyczny Kateda Elektotechniki Teoetycznej i Metologii nstukcja do zajęć laboatoyjnych z pzedmiotu MENCTWO WEKOŚC EEKTYCZNYCH NEEEKTYCZNYCH Kod pzedmiotu: ENSC554 Ćwiczenie
Politechnika Białostocka Wydział Elektyczny Kateda Elektotechniki Teoetycznej i Metologii nstukcja do zajęć laboatoyjnych z pzedmiotu MENCTWO WEKOŚC EEKTYCZNYCH NEEEKTYCZNYCH Kod pzedmiotu: ENSC554 Ćwiczenie
Układ bezpośredniego sterowania momentem silnika indukcyjnego DTC-SVM odporny na uszkodzenia czujnika prędkości kątowej
 Kal KLIMKOWSKI, Matuz DYBKOWSKI Poltchnka Wocławka, Katda Mazyn, Napędów Poaów Elktycznych do:0.599/48.05.08.4 Układ bzpośdngo towana ont lnka ndukcyjngo DTC-SVM odpony na uzkodzna czujnka pędkośc kątowj
Kal KLIMKOWSKI, Matuz DYBKOWSKI Poltchnka Wocławka, Katda Mazyn, Napędów Poaów Elktycznych do:0.599/48.05.08.4 Układ bzpośdngo towana ont lnka ndukcyjngo DTC-SVM odpony na uzkodzna czujnka pędkośc kątowj
ANALIZA WEKTOROWYCH METOD PRZEKSZTAŁTNIKOWEGO STEROWANIA AUTONOMICZNYM GENERATOREM INDUKCYJNYM
 Zeszyty Problemowe Maszyny Elektryczne Nr 92/211 193 Błażej Jakubowski, Krzysztof Pieńkowski Politechnika Wrocławska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych ANALIZA WEKTOROWYCH METOD PRZEKSZTAŁTNIKOWEGO
Zeszyty Problemowe Maszyny Elektryczne Nr 92/211 193 Błażej Jakubowski, Krzysztof Pieńkowski Politechnika Wrocławska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych ANALIZA WEKTOROWYCH METOD PRZEKSZTAŁTNIKOWEGO
INSTRUKCJA. Ćwiczenie A2. Wyznaczanie współczynnika sprężystości sprężyny metodą dynamiczną.
 INSRUKCJA Ćwiczenie A Wyznaczanie wpółczynnia prężytości prężyny metodą dynamiczną. Przed zapoznaniem ię z intrucją i przytąpieniem do wyonania ćwiczenia należy zapoznać ię z natępującymi zagadnieniami:
INSRUKCJA Ćwiczenie A Wyznaczanie wpółczynnia prężytości prężyny metodą dynamiczną. Przed zapoznaniem ię z intrucją i przytąpieniem do wyonania ćwiczenia należy zapoznać ię z natępującymi zagadnieniami:
Obliczenia konstrukcyjne
 Obliczenia onstrucyjne Buyne biurowo-warsztatowy w Tolmicu Inwestor: Opracował: inż. Bogusław Kwaśnici Obliczenia wyonano la: - I strefy śniegowej w/g PN 80/B 0010 - II strefy wiatrowej w/g PN 77/B 0011
Obliczenia onstrucyjne Buyne biurowo-warsztatowy w Tolmicu Inwestor: Opracował: inż. Bogusław Kwaśnici Obliczenia wyonano la: - I strefy śniegowej w/g PN 80/B 0010 - II strefy wiatrowej w/g PN 77/B 0011
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
POLE MAGNETYCZNE W PRÓŻNI - CD. Zjawisko indukcji elektromagnetycznej polega na powstawaniu prądu elektrycznego w
 POL AGNTYCZN W PRÓŻNI - CD Indukcja elektomagnetyczna Zjawsko ndukcj elektomagnetycznej polega na powstawanu pądu elektycznego w zamknętym obwodze wskutek zmany stumena wektoa ndukcj magnetycznej. Np.
POL AGNTYCZN W PRÓŻNI - CD Indukcja elektomagnetyczna Zjawsko ndukcj elektomagnetycznej polega na powstawanu pądu elektycznego w zamknętym obwodze wskutek zmany stumena wektoa ndukcj magnetycznej. Np.
3 BADANIE WYDAJNOŚCI SPRĘŻARKI TŁOKOWEJ. 1. Wprowadzenie
 3 BADANIE WYDAJNOŚCI SPRĘŻARKI TŁOKOWEJ. Wprowadzene Sprężarka jet podtawowym przykładem otwartego układu termodynamcznego. Jej zadanem jet medzy nnym podwyżzene cśnena gazu w celu: uzykane czynnka napędowego
3 BADANIE WYDAJNOŚCI SPRĘŻARKI TŁOKOWEJ. Wprowadzene Sprężarka jet podtawowym przykładem otwartego układu termodynamcznego. Jej zadanem jet medzy nnym podwyżzene cśnena gazu w celu: uzykane czynnka napędowego
AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI, INFORMATYKI I ELEKTRONIKI KATEDRA MASZYN ELEKTRYCZNYCH
 AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI, INFORMATYKI I ELEKTRONIKI KATEDRA MASZYN ELEKTRYCZNYCH ROZPRAWA DOKTORSKA STANY DYNAMICZNE ELEKTROWNI WIATROWEJ Z
AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI, INFORMATYKI I ELEKTRONIKI KATEDRA MASZYN ELEKTRYCZNYCH ROZPRAWA DOKTORSKA STANY DYNAMICZNE ELEKTROWNI WIATROWEJ Z
Zasilacz laboratoryjny symetryczny PS-3005D-II
 Infomacje o podukcie Utwozo 01-11-2017 Zasilacz laboatoyjny symetyczny PS-3005D-II Cena : 850,00 zł N katalogowy : PS-3005D-II Poducent : Zhaoxin Dostępność : Dostępny Stan magazynowy : badzo wysoki Śednia
Infomacje o podukcie Utwozo 01-11-2017 Zasilacz laboatoyjny symetyczny PS-3005D-II Cena : 850,00 zł N katalogowy : PS-3005D-II Poducent : Zhaoxin Dostępność : Dostępny Stan magazynowy : badzo wysoki Śednia
3. Siła bezwładności występująca podczas ruchu ciała w układzie obracającym się siła Coriolisa
 3. Sła bezwładnośc występująca podczas uchu cała w układze obacającym sę sła Coolsa ω ω ω v a co wdz obsewato w układze necjalnym co wdz obsewato w układze nenecjalnym tajemncze pzyspeszene: to właśne
3. Sła bezwładnośc występująca podczas uchu cała w układze obacającym sę sła Coolsa ω ω ω v a co wdz obsewato w układze necjalnym co wdz obsewato w układze nenecjalnym tajemncze pzyspeszene: to właśne
Pomiar mocy i energii
 Zakład Napędów Weloźródłowych Instytut Maszyn Roboczych CęŜkch PW Laboratorum Elektrotechnk Elektronk Ćwczene P3 - protokół Pomar mocy energ Data wykonana ćwczena... Zespół wykonujący ćwczene: Nazwsko
Zakład Napędów Weloźródłowych Instytut Maszyn Roboczych CęŜkch PW Laboratorum Elektrotechnk Elektronk Ćwczene P3 - protokół Pomar mocy energ Data wykonana ćwczena... Zespół wykonujący ćwczene: Nazwsko
w10 Silnik AC y elektrotechniki odstaw P
 40 Wirujące pole magnetyczne Moment synchroniczny Moment asynchroniczny Charakterystyka silnika synchronicznego Charakterystyka silnika asynchronicznego Silnik klatkowy Silnik indukcyjny jednofazowy Moment
40 Wirujące pole magnetyczne Moment synchroniczny Moment asynchroniczny Charakterystyka silnika synchronicznego Charakterystyka silnika asynchronicznego Silnik klatkowy Silnik indukcyjny jednofazowy Moment
2. Wyznaczyć K(s)=? 3. Parametry układu przedstawionego na rysunku są następujące: Obiekt opisany równaniem: y = x(
=? 3. Parametry układu przedstawionego na rysunku są następujące: Obiekt opisany równaniem: y = x(") Przykładowe zadania EGZAMINACYJNE z przedmiotu PODSTAWY AUTOMATYKI. Dla przedtawionego układu a) Podać równanie różniczkujące opiujące układ Y b) Wyznacz tranmitancję operatorową X C R x(t) L. Wyznaczyć
Przykładowe zadania EGZAMINACYJNE z przedmiotu PODSTAWY AUTOMATYKI. Dla przedtawionego układu a) Podać równanie różniczkujące opiujące układ Y b) Wyznacz tranmitancję operatorową X C R x(t) L. Wyznaczyć
4. O funkcji uwikłanej 4.1. Twierdzenie. Niech będzie dana funkcja f klasy C 1 na otwartym podzbiorze. ϕ : K(x 0, δ) (y 0 η, y 0 + η), taka że
 (y 0 η, y 0 + η), taka że") 4. O funkcji uwikłanej 4.1. Twierdzenie. Niech będzie dana funkcja f klasy C 1 na otwartym podzbiorze taka że K(x 0, δ) (y 0 η, y 0 + η) R n R, f(x 0, y 0 ) = 0, y f(x 0, y 0 ) 0. Wówczas dla odpowiednio
4. O funkcji uwikłanej 4.1. Twierdzenie. Niech będzie dana funkcja f klasy C 1 na otwartym podzbiorze taka że K(x 0, δ) (y 0 η, y 0 + η) R n R, f(x 0, y 0 ) = 0, y f(x 0, y 0 ) 0. Wówczas dla odpowiednio
DOBÓR SERWOSILNIKA POSUWU
 DOBÓR SERWOSILNIKA POSUWU Rysunek 1 przedstawa schemat knematyczny napędu jednej os urządzena. Fp Fw mc l Sp Serwoslnk Rys. 1. Schemat knematyczny serwonapędu: przełożene przekładn pasowej, S p skok śruby
DOBÓR SERWOSILNIKA POSUWU Rysunek 1 przedstawa schemat knematyczny napędu jednej os urządzena. Fp Fw mc l Sp Serwoslnk Rys. 1. Schemat knematyczny serwonapędu: przełożene przekładn pasowej, S p skok śruby
Podstawy Procesów i Konstrukcji Inżynierskich. Ruch obrotowy INZYNIERIAMATERIALOWAPL. Kierunek Wyróżniony przez PKA
 Podstawy Pocesów Konstukcj Inżyneskch Ruch obotowy Keunek Wyóżnony pzez PKA 1 Ruch jednostajny po okęgu Ruch cząstk nazywamy uchem jednostajnym po okęgu jeśl pousza sę ona po okęgu lub kołowym łuku z pędkoścą
Podstawy Pocesów Konstukcj Inżyneskch Ruch obotowy Keunek Wyóżnony pzez PKA 1 Ruch jednostajny po okęgu Ruch cząstk nazywamy uchem jednostajnym po okęgu jeśl pousza sę ona po okęgu lub kołowym łuku z pędkoścą
Dielektryki Opis w domenie częstotliwości
 Dielektryki Opis w domenie częstotliwości Ryszard J. Barczyński, 2013 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Opis w domenie częstotliwości
Dielektryki Opis w domenie częstotliwości Ryszard J. Barczyński, 2013 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Opis w domenie częstotliwości
EKONOMETRIA I Spotkanie 1, dn. 05.10.2010
 EKONOMETRIA I Spotkane, dn. 5..2 Dr Katarzyna Beń Program ramowy: http://www.sgh.waw.pl/nstytuty/e/oferta_dydaktyczna/ekonometra_stacjonarne_nest acjonarne/ Zadana, dane do zadań, ważne nformacje: http://www.e-sgh.pl/ben/ekonometra
EKONOMETRIA I Spotkane, dn. 5..2 Dr Katarzyna Beń Program ramowy: http://www.sgh.waw.pl/nstytuty/e/oferta_dydaktyczna/ekonometra_stacjonarne_nest acjonarne/ Zadana, dane do zadań, ważne nformacje: http://www.e-sgh.pl/ben/ekonometra
Modelowanie ruchu autobusu miejskiego dla celów optymalizacji układu napędowego
 KORALEWSKI Gzegoz 1 WRONA Rafał Moelowane uchu autobusu mejskego la celów optymalzacj ukłau napęowego WSTĘP Współczesne autobusy, jak nne pojazy samochoowe, obecne bazo często poukuje sę zestawając gotowy
KORALEWSKI Gzegoz 1 WRONA Rafał Moelowane uchu autobusu mejskego la celów optymalzacj ukłau napęowego WSTĘP Współczesne autobusy, jak nne pojazy samochoowe, obecne bazo często poukuje sę zestawając gotowy
ANALIZA WŁASNOŚCI SILNIKA RELUKTANCYJNEGO METODAMI POLOWYMI
 Akadema Górnczo-Hutncza Wydzał Elektrotechnk, Automatyk, Informatyk Elektronk Koło naukowe MAGNEIK ANAIZA WŁANOŚCI INIKA EUKANCYJNEGO MEODAMI POOWYMI Marcn Welgus Wtold Zomek Opekun naukowy referatu: dr
Akadema Górnczo-Hutncza Wydzał Elektrotechnk, Automatyk, Informatyk Elektronk Koło naukowe MAGNEIK ANAIZA WŁANOŚCI INIKA EUKANCYJNEGO MEODAMI POOWYMI Marcn Welgus Wtold Zomek Opekun naukowy referatu: dr
Graf skierowany. Graf zależności dla struktur drzewiastych rozgrywających parametrycznie
 Gaf skieowany Gaf skieowany definiuje się jako upoządkowaną paę zbioów. Piewszy z nich zawiea wiezchołki gafu, a dugi składa się z kawędzi gafu, czyli upoządkowanych pa wiezchołków. Ruch po gafie możliwy
Gaf skieowany Gaf skieowany definiuje się jako upoządkowaną paę zbioów. Piewszy z nich zawiea wiezchołki gafu, a dugi składa się z kawędzi gafu, czyli upoządkowanych pa wiezchołków. Ruch po gafie możliwy
Badanie silnika asynchronicznego jednofazowego
 Badanie silnika asynchronicznego jednofazowego Cel ćwiczenia Celem ćwiczenia jest poznanie budowy i zasady funkcjonowania silnika jednofazowego. W ramach ćwiczenia badane są zmiany wartości prądu rozruchowego
Badanie silnika asynchronicznego jednofazowego Cel ćwiczenia Celem ćwiczenia jest poznanie budowy i zasady funkcjonowania silnika jednofazowego. W ramach ćwiczenia badane są zmiany wartości prądu rozruchowego
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Siły oporu prędkość graniczna w spadku swobodnym
 FZYKA Wykład echanika: Pojęcia podstawowe dynamika i punktu histoia mateialnego (V) Siły opou pędkość ganiczna w spadku swobodnym Układy Pojęcia nieinecjalne podstawowe () i histoia Siły w układach nieinecjalnych
FZYKA Wykład echanika: Pojęcia podstawowe dynamika i punktu histoia mateialnego (V) Siły opou pędkość ganiczna w spadku swobodnym Układy Pojęcia nieinecjalne podstawowe () i histoia Siły w układach nieinecjalnych
Metody systemowe i decyzyjne w informatyce
 Metody ytemowe i decyzyjne w informatyce Ćwiczenia lita zadań nr 1 Prote zatoowania równań różniczkowych Zad. 1 Liczba potencjalnych użytkowników portalu połecznościowego wynoi 4 miliony oób. Tempo, w
Metody ytemowe i decyzyjne w informatyce Ćwiczenia lita zadań nr 1 Prote zatoowania równań różniczkowych Zad. 1 Liczba potencjalnych użytkowników portalu połecznościowego wynoi 4 miliony oób. Tempo, w
OBLICZENIA SPRZ ENIA CIERNEGO
 OBLICZENIA SPRZENIA CIERNEGO 1. Dane wejciowe do oblicze: Udwig nominalny: Masa kabiny, amy i ospztu: Masa pzeciwwagi: Q := P := P b := 450 kg 60 kg 855 kg Pdko nominalna: v := 1 m s Wysoko podnoszenia:
OBLICZENIA SPRZENIA CIERNEGO 1. Dane wejciowe do oblicze: Udwig nominalny: Masa kabiny, amy i ospztu: Masa pzeciwwagi: Q := P := P b := 450 kg 60 kg 855 kg Pdko nominalna: v := 1 m s Wysoko podnoszenia:
ĆWICZENIE 2 SYGNAŁY DYSKRETNE, RÓWNANIA RÓśNICOWE I TRANSFORMACJA DTFT
 Ćw. 2. Sygnały dykretne, równania róŝnicowe i tranformacja DTT Laboratorium PiAPS 2007-10-13 A. Leśnicki, C. Stefańki, M.Makowki, A. Sobocinki 1/7 ĆWICZENIE 2 SYGNAŁY DYSKRETNE, RÓWNANIA RÓśNICOWE I TRANSORMACJA
Ćw. 2. Sygnały dykretne, równania róŝnicowe i tranformacja DTT Laboratorium PiAPS 2007-10-13 A. Leśnicki, C. Stefańki, M.Makowki, A. Sobocinki 1/7 ĆWICZENIE 2 SYGNAŁY DYSKRETNE, RÓWNANIA RÓśNICOWE I TRANSORMACJA
Diagnostyka ukladów napedowych
 Czeslaw T. Kowalski Diagnostyka ukladów napedowych z silnikiem indukcyjnym z zastosowaniem metod sztucznej inteligencji Oficyna Wydawnicza Politechniki Wroclawskiej Wroclaw 2013! Spis tresci Przedmowa
Czeslaw T. Kowalski Diagnostyka ukladów napedowych z silnikiem indukcyjnym z zastosowaniem metod sztucznej inteligencji Oficyna Wydawnicza Politechniki Wroclawskiej Wroclaw 2013! Spis tresci Przedmowa