Sterowanie napędów maszyn i robotów
|
|
|
- Michał Wysocki
- 9 lat temu
- Przeglądów:
Transkrypt
1 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Prezentacja dystrybuowana jest bezpłatnie

2 Wprowadzenie do aktuatoryki maszyn i robotów Aktuatoryka/aktoryka - (ang. actuator - urządzenie uruchamiające, nastawnik) dziedzina mechatroniki zajmująca się budową i sterowaniem urządzeń wykonawczych, realizujących zadania ruchowe i siłowe eliminując tym samym udział człowieka w sterowaniu. Aktuator/aktor (urządzenie wykonawcze, element wykonawczy) w technice, określenie urządzenia mechanicznego, występującego w układach regulacji, które na podstawie sygnału sterującego wypracowuje sygnał wejściowy do obiektu regulacji. Do urządzeń wykonawczych można zaliczyć m.in.: w mechanice siłowniki pneumatyczne, hydrauliczne, silniki, dźwignie hydrauliczne, wzmacniacze elektrohydrauliczne, są to odpowiedniki : rąk, dłoni, nóg, palców człowieka. System mechatroniczny
 w technice, określenie urządzenia mechanicznego, występującego w układach regulacji, które na podstawie sygnału sterującego")
3 Współczesne urządzenia wykonawcze Silniki prądu stałego Siłowniki Silniki indukcyjne Elementy piezoelektryczne



4 Budowa serwomechanizmu napędowego sterownik silnika enkoder silnik do układu napędzanego (bezpośrednio lub poprzez przekładnię mechaniczną)

5 Sterowanie - celowe oddziaływanie na obiekt sterowania, mające doprowadzić do pożądanych zmian w procesach w nim zachodzących. Poziom energetyczny sygnałów sterujących z reguły znacznie niższy niż sygnałów, na które wpływają. Przykładowy układ sterowania: Otwarty układ sterowania Zamknięty układ sterowania

6 Zadania układów sterowania przeniesienia procedur sterowania na układ pozycyjny zestawiony ze sterownika procesorowego współpracującego z przetwornikiem (sensorem) położenia i ewent. innymi sensorami pełna automatyzacja działań rozruchu i uruchomienia układu napędowego z założeniem niepełnej lub całkowitej nieznajomości przez operatora parametrów napędu zapewnienie bezpiecznego przejścia od fazy rozruchu i uruchomienia do fazy normalnej pracy układu (zapewnienie determinowanego zachowania napędu) dobór nastaw startowych sterowania automatycznie, z założeniem nieznajomości zasad parametryzacji sterowania przez operatora (z ewent. wymaganiem niedopuszczenia operatora do tej czynności) odporność sterowania pozycyjnego na skokowe zmiany warunków pracy: - zmiany wartości zadanych położeń i zakresów przemieszczeń - zmiany kierunku ruchu napędu - zmiany położenia układu napędowego - zmiany wartości obciążenia (masowego)

7 Zadania układów sterowania, cd. kompensacja przez układ sterowania powolnych zmian wartości systemowych: - temperatury otoczenia - parametrów zasilania (wartości napięć, ciśnień itp.) - właściwości ciernych napędu i napędzanego urządzenia (np.. starzenie i zanieczyszczenie smaru) - zjawisk tribologicznych wywołanych postojem układu napędowego Generalnie można także powiedzieć, że ogólnym zadaniem układu sterowania jest zwiększenie globalnego zysku przedsiębiorstwa. Wyżej wymienione zadania są tylko elementami pośrednimi w realizacji tego głównego celu. Dobrze dobrany układ sterowania pozwala osiągnąć: - wysoką dokładność wykonania towarów, - mniejsza ilość braków, - bezpieczeństwo przebiegu procesu, co znacząco wpływa zysk.

8 Sterowanie pozycyjne (pozycjonowanie) układu napędowego jest celowym oddziaływaniem na przebieg procesu ruchu elementu ruchomego napędu dla zapewnienia żądanych zmian wartości jego położenia (drogi, pozycji, przemieszczenia liniowego lub kątowego) jako głównej wielkości sterowanej napędowego układu pozycyjnego. Rozróżnia się dwa rodzaje pozycjonowania: przestawianie przemieszczenie elementu ruchomego do pozycji zadanej, z zapewnieniem określonej jakości realizacji procesu ruchu i utrzymanie zadanej wartości położenia pozycji w czasie z określoną odchyłką ustaloną nadążanie przemieszczanie elementu ruchomego w sposób określony zmianami wartości wielkości zadającej, z zapewnieniem określonej jakości realizacji procesu ruchu i określonej odchyłki nadążania Pomocniczymi wielkościami sterowanymi układu pozycyjnego są: prędkość, przyśpieszenie, itp., jako kolejne, fazowe, zmienne stanu realizowanego procesu ruchu

9 Sterowanie siłowe (momentowe) jest oddziaływaniem siłowym na element napędzanego urządzenia Gdzie spotykamy się ze sterowaniem siłowym???

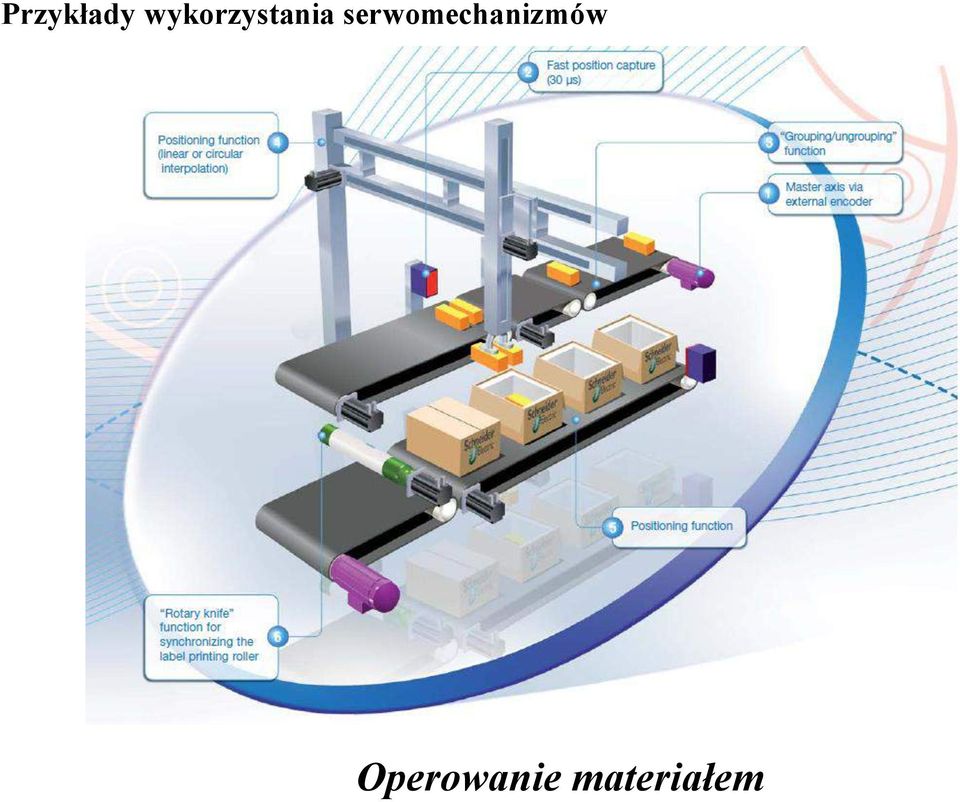
10 Przykłady wykorzystania serwomechanizmów Operowanie materiałem
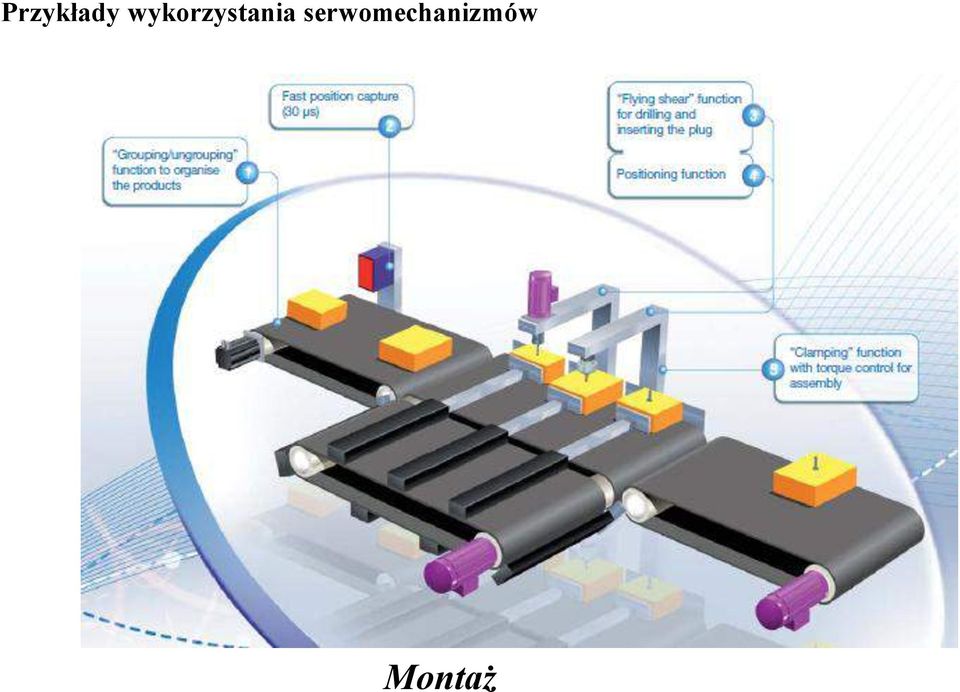
11 Przykłady wykorzystania serwomechanizmów Montaż
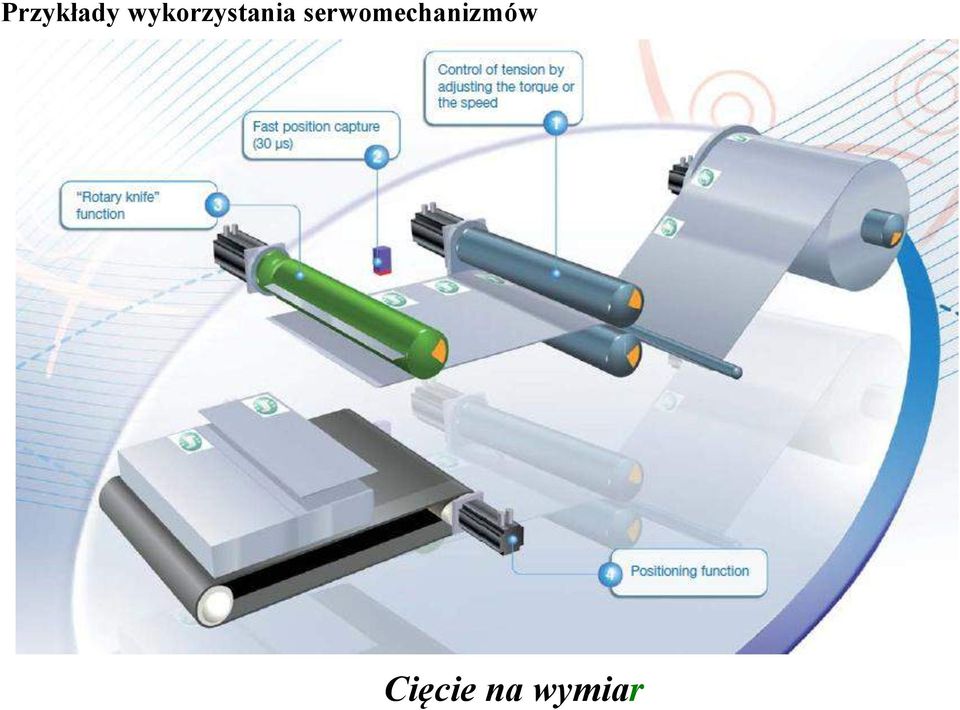
12 Przykłady wykorzystania serwomechanizmów Cięcie na wymiar
13 Wymagania stawiane współczesnym napędom - w warunkach statycznych: dysponowanie siłą lub momentem obrotowym potrzebnym do pokonania sił tarcia oraz obciążeń masowych, siłowych i momentowych dysponowanie dużym zakresem regulacji prędkości lub obrotów wykonywanie ruchu z minimalnymi przemieszczeniami (np.: od 0,1 µm do 1 mm) ruch ze stałą prędkością (v const), także dla najmniejszych prędkości (roboczych, technologicznych, pełzania) (rzędu 1-5 mm/s), brak drgań, zwłaszcza ciernych (tarcie przylgowe stick slip) 13
 ruch ze stałą prędkością (v const), także dla najmniejszych prędkości (roboczych, technologicznych,")
14 Wymagania stawiane współczesnym napędom - w warunkach dynamicznych: duże przyspieszenia (załączanie) i opóźnienia (hamowanie) ruchu dysponowanie odpowiednio dużymi momentami przyspieszenia i hamowania Czy moment potrzebny na przyśpieszenie/zwolnienie jest momentem stałym czy chwilowym, który musi wytworzyć maszyna??? dokładność odtworzenia toru ruchu przy zadanych prędkościach roboczych (od 1 [µm] do 1 [mm]) i prędkościach jałowych (od 1 [mm] do 10 mm) 14
 i prędkościach")
15 Dobór napędu: dane o maszynie Aby właściwe dobrać silnik do napędzanego układu potrzebne są informacje o kinematyce maszyny: Rodzaj osi: Obrotowa czy liniowa? Pionowa czy pozioma? Kąt nachylenia? Typ kinematyki maszyny: Rodzaj kinematyki (podajnik taśmowy, przekładnia śrubowa, przekładnia zębata,.) Rodzaj połączenia (ślizgowe, łożyska, rolki ) dla oszacowania tarcia Rodzaj i przełożenie przekładni. (zębata, pasowa, ) Rodzaj obciążenia maszyny: Rozmiar obciążenia Masa obciążenia 15
 Rodzaj połączenia (ślizgowe, łożyska, rolki ) dla oszacowania tarcia Rodzaj i przełożenie przekładni.")
16 Dobór napędu: dane o maszynie Należy zdefiniować wszystkie wymagania dotyczące parametrów ruchu: Maksymalna prędkości osi Wymagana siła lub moment obrotowy Parametry optymalnego cyklu pracy: czas cyklu, czas przyśpieszania i hamowania, dystans ruchu (odległość), 16

17 Dobór napędu: aspekty statyczne Parametry do zdefiniowania: Maksymalna prędkość silnika: n MAX. Na podstawie znanej kinematyki i wymagań odnośnie ruchu należy oszacować maksymalną prędkość jaką musi osiągać silnik Wytwarzany moment obrotowy M t. Na podstawie znanej kinematyki i wymagań odnośnie wytwarzanej siły należy oszacować potrzebny moment obrotowy Moment tarcia Mf. Należy obliczyć lub oszacować moment tarcia występujący w danej osi Pierwsze podejście w doborze silnika: Prędkość znamionowa: n N > n MAX. Moment znamionowy: M N > M t + M f. 17

18 Dobór napędu: aspekty dynamiczne Parametry do zdefiniowania: Moment obrotowy przyśpieszenia: M ACC = Jω. Na podstawie znanej kinematyki i wymagań odnośnie ruchu należy obliczyć moment obrotowy potrzebny do osiągnięcia wymaganego przyśpieszenia Moment tarcia M f. Należy obliczyć lub oszacować moment tarcia występujący w danej osi Moment ten jest dodawany do monety przyśpieszenia podczas przyśpieszania oraz odejmowany podczas hamowania Pierwsze podejście w doborze silnika: Maksymalny moment obrotowy: M MAX > M ACC + M f. 18

19 Dobór napędu: weryfikacja termiczna Dla silnika dobranego według poprzednich wytycznych konieczne jest sprawdzenie jego przydatności w cyklu pracy Należy narysować prędkość i moment obrotowy w funkcji czasu dla całego cyklu pracy

20 Dobór napędu: weryfikacja termiczna Obliczamy średnią prędkość w cyklu pracy. n n t i i avg Tcycle ni Podczas przyśpieszania i zwalniania: ni 2 Obliczamy ekwiwalentny moment termiczny M th Mi ² T cycle t i

21 Dobór napędu: weryfikacja termiczna Porównujemy wyniki obliczeń z wykresem momentu obrotowego silnika: M [Nm] Obszar pracy przerywanej B M th A M th n [obr/min] n avg n avg Obszar pracy ciągłej Przypadek A : Silnik dobrany prawidłowo do cyklu pracy Przypadek B : Należy wybrać inny silnik z wyższym ciągłym momentem obrotowym
22 Dobór napędu: moment bezwładności Znając dane maszyny oraz jej obciążenia należy obliczyć iloraz momentu bezwładności obciążenia silnika (zredukowanego do wału silnika) i momentu bezwładności silnika Jeżeli ten stosunek tych wartości jest zbyt duży należy go zmniejszyć poprzez: zmienić kinematykę (np. poprzez wykorzystanie dodatkowej przekładni) wykorzystać inny silnik z większym momentem bezwładności ewentualnie wykorzystać oba sposoby Po dokonanych zmianach należy dobrać silnik ponownie (zmiany kinematyki) Typowe ilorazy inercji obciążenia do inercji silnika: 1:1 to 3:1 dla aplikacji robotycznych (manipulatory kartezjańskie) 4:1 to 7:1 dla napędów osi obrabiarek numerycznych 8:1 to 10:1 dla innych aplikacji W praktyce często przyjmuje się stosunek wartości momentów bezwładności : 5:1 dla dynamicznych i dokładnych maszyn 10:1 dla maszyn standardowych wyższe jeżeli zależy nam na dokładności pozycjonowania bez ograniczeń dotyczących czasu cyklu
23 Dziękuję za uwagę
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie Napędów Maszyn i Robotów
 Wykład 1 - Wprowadzenie, pojęcia podstawowe Instytut Automatyki i Robotyki Warszawa, 2015 Program Dane dotyczące przedmiotu Prowadzący:, Gmach Mechatroniki, p. 346, e-mail: j.mozaryn@mchtr.pw.edu.pl. Strona
Wykład 1 - Wprowadzenie, pojęcia podstawowe Instytut Automatyki i Robotyki Warszawa, 2015 Program Dane dotyczące przedmiotu Prowadzący:, Gmach Mechatroniki, p. 346, e-mail: j.mozaryn@mchtr.pw.edu.pl. Strona
Sterowanie Napędów Maszyn i Robotów
 Wykład 1 - Wprowadzenie, pojęcia podstawowe Instytut Automatyki i Robotyki Warszawa, 2017 Zakres wykładu 2. Zakres wykładu Dane dotyczące przedmiotu Dane dotyczące przedmiotu Prowadzący: dr inż., Gmach
Wykład 1 - Wprowadzenie, pojęcia podstawowe Instytut Automatyki i Robotyki Warszawa, 2017 Zakres wykładu 2. Zakres wykładu Dane dotyczące przedmiotu Dane dotyczące przedmiotu Prowadzący: dr inż., Gmach
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie. Ćwiczenie 3 Dobór mikrosilnika prądu stałego do układu pozycjonującego
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym
 Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Zasady doboru mikrosilników prądu stałego
 Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
PROJEKTOWANIE MECHATRONICZNE UKŁADY NAPĘDOWE OBRABIAREK
 PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl Wśród układów napędowych obrabiarek można rozróżnić napędy główne
PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl Wśród układów napędowych obrabiarek można rozróżnić napędy główne
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
OSIE ELEKTRYCZNE SERII SHAK GANTRY
 OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
Ćwiczenie 1. Badanie aktuatora elektrohydraulicznego. Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium. Instrukcja laboratoryjna
 Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
OSIE ELEKTRYCZNE SERII SVAK
 OSIE ELEKTRYCZNE SERII SVAK 1 OSIE ELEKTRYCZNE SERII SVAK Jednostka liniowa serii SVAK to napęd paskowy ze stałym wózkiem i ruchomym profilem. Uzupełnia ona gamę osi elektrycznych Metal Work ułatwiając
OSIE ELEKTRYCZNE SERII SVAK 1 OSIE ELEKTRYCZNE SERII SVAK Jednostka liniowa serii SVAK to napęd paskowy ze stałym wózkiem i ruchomym profilem. Uzupełnia ona gamę osi elektrycznych Metal Work ułatwiając
SYSTEMY ENERGETYKI ODNAWIALNEJ
 SYSTEMY ENERGETYKI ODNAWIALNEJ Wykład: Układy sterowania i regulacji w energetyce Prowadzący: dr inż. Marcin Michalski kontakt: e-mail: energetyka.michalski@gmail.com energetyka.michalski Slajd 1 ZASADY
SYSTEMY ENERGETYKI ODNAWIALNEJ Wykład: Układy sterowania i regulacji w energetyce Prowadzący: dr inż. Marcin Michalski kontakt: e-mail: energetyka.michalski@gmail.com energetyka.michalski Slajd 1 ZASADY
Ćwiczenie 1 Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych
 Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych Przykłady napędów bezpośrednich - twardy
Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych Przykłady napędów bezpośrednich - twardy
Egzamin 1 Strona 1. Egzamin - AR egz Zad 1. Rozwiązanie: Zad. 2. Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same
 Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny
 Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Wpływ tarcia na serwomechanizmy
 Wpływ tarcia na serwomechanizmy Zakłócenia oddziałujące na serwomechanizm Siły potencjalne/grawitacji, Tarcie, Zmienny moment bezwładności, Zmienny moment obciążenia Tarcie Zjawisko to znane jest od bardzo
Wpływ tarcia na serwomechanizmy Zakłócenia oddziałujące na serwomechanizm Siły potencjalne/grawitacji, Tarcie, Zmienny moment bezwładności, Zmienny moment obciążenia Tarcie Zjawisko to znane jest od bardzo
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Sterowanie układem zawieszenia magnetycznego
 Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
SILNIK KROKOWY. w ploterach i małych obrabiarkach CNC.
 SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SIŁOWNIKI ŚRUBOWE FIRMY INKOMA - GROUP
 - 2 - Spis treści 1. Siłowniki śrubowe HSGK - Informacje ogólne... - 3-2. Siłowniki śrubowe HSGK - warianty wykonania... - 4-3. Siłowniki śrubowe HSGK - śruba trapezowa wykonanie ze śrubą obrotową (R)...
- 2 - Spis treści 1. Siłowniki śrubowe HSGK - Informacje ogólne... - 3-2. Siłowniki śrubowe HSGK - warianty wykonania... - 4-3. Siłowniki śrubowe HSGK - śruba trapezowa wykonanie ze śrubą obrotową (R)...
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
Ćwiczenie 2 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy
Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego
 Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Cel ćwiczenia. Przetwornik elektromagnetyczny. Silniki krokowe. Układ sterowania napędu mechatronicznego z silnikiem krokowym.
 KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
Próby ruchowe dźwigu osobowego
 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
Twój partner w potrzebie. 32-083 Balice, ul. Krakowska 50 tel.: +48 12 630 47 61, fax: +48 12 630 47 28 e-mail: sales@admech.pl www.admech.
 Twój partner w potrzebie 32-083 Balice, ul. Krakowska 50 tel.: +48 12 630 47 61, fax: +48 12 630 47 28 e-mail: sales@admech.pl www.admech.pl Sprzęgła CD SERIA A1C Sprzęgła CD SERIA A1C Precyzyjne, niezawodne
Twój partner w potrzebie 32-083 Balice, ul. Krakowska 50 tel.: +48 12 630 47 61, fax: +48 12 630 47 28 e-mail: sales@admech.pl www.admech.pl Sprzęgła CD SERIA A1C Sprzęgła CD SERIA A1C Precyzyjne, niezawodne
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną
 Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 3 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 3 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Opracował: mgr inż. Marcin Wieczorek
 Opracował: mgr inż. Marcin Wieczorek Jeżeli moment napędowy M (elektromagnetyczny) silnika będzie większy od momentu obciążenia M obc o moment strat jałowych M 0 czyli: wirnik będzie wirował z prędkością
Opracował: mgr inż. Marcin Wieczorek Jeżeli moment napędowy M (elektromagnetyczny) silnika będzie większy od momentu obciążenia M obc o moment strat jałowych M 0 czyli: wirnik będzie wirował z prędkością
Ćwiczenie 1b. Silnik prądu stałego jako element wykonawczy Modelowanie i symulacja napędu CZUJNIKI POMIAROWE I ELEMENTY WYKONAWCZE
 Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-6 BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-6 BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
Badanie silnika bezszczotkowego z magnesami trwałymi (BLCD)
") Badanie silnika bezszczotkowego z magnesami trwałymi (BLCD) Badane silniki BLCD są silnikami bezszczotkowymi prądu stałego (odpowiednikami odwróconego konwencjonalnego silnika prądu stałego z magnesami
Badanie silnika bezszczotkowego z magnesami trwałymi (BLCD) Badane silniki BLCD są silnikami bezszczotkowymi prądu stałego (odpowiednikami odwróconego konwencjonalnego silnika prądu stałego z magnesami
Wymagania konieczne ( na ocenę: dopuszczający)
") Wymagania edukacyjne dla uczniów TE ZS Nr 1 w Olkuszu z przedmiotu : Montaż i konserwacja maszyn i urządzeń elektrycznych na podstawie programu nauczania : TECHNIK ELEKTRYK Nr programu : 311303 nauczyciel
Wymagania edukacyjne dla uczniów TE ZS Nr 1 w Olkuszu z przedmiotu : Montaż i konserwacja maszyn i urządzeń elektrycznych na podstawie programu nauczania : TECHNIK ELEKTRYK Nr programu : 311303 nauczyciel
Serwomechanizmy sterowanie
 Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Automatyka i Regulacja Automatyczna SEIwE- sem.4
 Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
DOSTAWA WYPOSAŻENIA HAMOWNI MASZYN ELEKTRYCZNYCH DLA LABORATORIUM LINTE^2 OPIS PRZEDMIOTU ZAMÓWIENIA
 ZAŁĄCZNIK Z1.A do Specyfikacji Istotnych Warunków Zamówienia, postępowanie nr ZP/220/014/D/15 DOSTAWA WYPOSAŻENIA HAMOWNI MASZYN ELEKTRYCZNYCH DLA LABORATORIUM LINTE^2 OPIS PRZEDMIOTU ZAMÓWIENIA CZĘŚĆ
ZAŁĄCZNIK Z1.A do Specyfikacji Istotnych Warunków Zamówienia, postępowanie nr ZP/220/014/D/15 DOSTAWA WYPOSAŻENIA HAMOWNI MASZYN ELEKTRYCZNYCH DLA LABORATORIUM LINTE^2 OPIS PRZEDMIOTU ZAMÓWIENIA CZĘŚĆ
Badanie powtarzalności pozycjonowania robota IRp-6
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie powtarzalności pozycjonowania robota IRp-6 opracował: dr inż. Paweł Cegielski Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Automatyzacja
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie powtarzalności pozycjonowania robota IRp-6 opracował: dr inż. Paweł Cegielski Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Automatyzacja
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE.
 1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
SIŁOWNIKI ŚRUBOWE FIRMY INKOMA - GROUP
 - 2 - Spis treści 1. Siłowniki śrubowe KSH z przekładnią stożkową o dużej prędkości podnoszenia - informacje ogólne... - 3-2. Siłowniki śrubowe KSH z przekładnią stożkową o dużej prędkości podnoszenia
- 2 - Spis treści 1. Siłowniki śrubowe KSH z przekładnią stożkową o dużej prędkości podnoszenia - informacje ogólne... - 3-2. Siłowniki śrubowe KSH z przekładnią stożkową o dużej prędkości podnoszenia
Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY. 1. Cel ćwiczenia
 Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY 1. Cel ćwiczenia Przeprowadzenie izolacji drgań przekładni zębatej oraz doświadczalne wyznaczenie współczynnika przenoszenia drgań urządzenia na fundament.. Wprowadzenie
Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY 1. Cel ćwiczenia Przeprowadzenie izolacji drgań przekładni zębatej oraz doświadczalne wyznaczenie współczynnika przenoszenia drgań urządzenia na fundament.. Wprowadzenie
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: NAPĘDY I STEROWANIE ELEKTROHYDRAULICZNE MASZYN DRIVES AND ELEKTRO-HYDRAULIC MACHINERY CONTROL SYSTEMS Kierunek: Mechatronika Forma studiów: STACJONARNE Kod przedmiotu: S1_07 Rodzaj przedmiotu:
Nazwa przedmiotu: NAPĘDY I STEROWANIE ELEKTROHYDRAULICZNE MASZYN DRIVES AND ELEKTRO-HYDRAULIC MACHINERY CONTROL SYSTEMS Kierunek: Mechatronika Forma studiów: STACJONARNE Kod przedmiotu: S1_07 Rodzaj przedmiotu:
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Ćwiczenie EA1 Silniki wykonawcze prądu stałego
 Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA1 Silniki wykonawcze prądu stałego Program ćwiczenia: A Silnik wykonawczy elektromagnetyczny 1. Zapoznanie się
Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA1 Silniki wykonawcze prądu stałego Program ćwiczenia: A Silnik wykonawczy elektromagnetyczny 1. Zapoznanie się
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
Wykład 1. Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi.
 Serwonapędy w automatyce i robotyce Wykład 1 iotr Sauer Katedra Sterowania i Inżynierii Systemów Wprowadzenie Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi. roces pozycjonowania osi - sposób
Serwonapędy w automatyce i robotyce Wykład 1 iotr Sauer Katedra Sterowania i Inżynierii Systemów Wprowadzenie Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi. roces pozycjonowania osi - sposób
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Układy napędowe maszyn - opis przedmiotu
 Układy napędowe maszyn - opis przedmiotu Informacje ogólne Nazwa przedmiotu Układy napędowe maszyn Kod przedmiotu 06.1-WM-MiBM-P-59_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa maszyn
Układy napędowe maszyn - opis przedmiotu Informacje ogólne Nazwa przedmiotu Układy napędowe maszyn Kod przedmiotu 06.1-WM-MiBM-P-59_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa maszyn
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Softstart z hamulcem MCI 25B
 MCI 25B softstart z hamulcem stałoprądowym przeznaczony jest to kontroli silników indukcyjnych klatkowych nawet do mocy 15kW. Zarówno czas rozbiegu, moment początkowy jak i moment hamujący jest płynnie
MCI 25B softstart z hamulcem stałoprądowym przeznaczony jest to kontroli silników indukcyjnych klatkowych nawet do mocy 15kW. Zarówno czas rozbiegu, moment początkowy jak i moment hamujący jest płynnie
Pomiar prędkości obrotowej
 2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
Zautomatyzowane systemy produkcyjne Kod przedmiotu
 Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
INSTRUKCJA DO ĆWICZENIA NR 2. Analiza kinematyczna napędu z przekładniami
 INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO
 TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
Zasady i kryteria zaliczenia: Zaliczenie pisemne w formie pytań opisowych, testowych i rachunkowych.
 Jednostka prowadząca: Wydział Techniczny Kierunek studiów: Inżynieria bezpieczeństwa Nazwa przedmiotu: Mechanika techniczna Charakter przedmiotu: podstawowy, obowiązkowy Typ studiów: inżynierskie pierwszego
Jednostka prowadząca: Wydział Techniczny Kierunek studiów: Inżynieria bezpieczeństwa Nazwa przedmiotu: Mechanika techniczna Charakter przedmiotu: podstawowy, obowiązkowy Typ studiów: inżynierskie pierwszego
Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Struktura układu pomiarowego drgań mechanicznych
 Wstęp Diagnostyka eksploatacyjna maszyn opiera się na obserwacji oraz analizie sygnału uzyskiwanego za pomocą systemu pomiarowego. Pomiar sygnału jest więc ważnym, integralnym jej elementem. Struktura
Wstęp Diagnostyka eksploatacyjna maszyn opiera się na obserwacji oraz analizie sygnału uzyskiwanego za pomocą systemu pomiarowego. Pomiar sygnału jest więc ważnym, integralnym jej elementem. Struktura
Laboratorium Maszyny CNC
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 5 Badanie dynamiki pozycjonowania stołu obrotowego w zakresie małych przemieszczeń Opracował: mgr inż. Krzysztof Netter
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 5 Badanie dynamiki pozycjonowania stołu obrotowego w zakresie małych przemieszczeń Opracował: mgr inż. Krzysztof Netter
Opracować model ATP-EMTP silnika indukcyjnego i przeprowadzić analizę jego rozruchu.
 PRZYKŁAD C5 Opracować model ATP-EMTP silnika indukcyjnego i przeprowadzić analizę jego rozruchu. W charakterze przykładu rozpatrzmy model silnika klatkowego, którego parametry są następujące: Moc znamionowa
PRZYKŁAD C5 Opracować model ATP-EMTP silnika indukcyjnego i przeprowadzić analizę jego rozruchu. W charakterze przykładu rozpatrzmy model silnika klatkowego, którego parametry są następujące: Moc znamionowa
Ćwiczenie EA5 Silnik 2-fazowy indukcyjny wykonawczy
 Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA5 Silnik 2-fazowy indukcyjny wykonawczy 1. Zapoznanie się z konstrukcją, zasadą działania i układami sterowania
Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA5 Silnik 2-fazowy indukcyjny wykonawczy 1. Zapoznanie się z konstrukcją, zasadą działania i układami sterowania
Silnik AFB AKN. Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C. Numer 0 (dziesiętne wartości wskazań)
") Silnik Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C. Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości 1. Obroty silnika. 30 do
Silnik Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C. Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości 1. Obroty silnika. 30 do
Teoria maszyn mechanizmów
 Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
MiAcz3. Elektryczne maszynowe napędy wykonawcze
 MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
Laboratorium Maszyny CNC. Nr 3
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
PR242012 23 kwietnia 2012 Mechanika Strona 1 z 5. XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów
 Rozszerzony System Transportowy: nowatorska technologia napędów") Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
ĆWICZENIE NR.6. Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych
 ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
Softstarty MCI - układy łagodnego rozruchu i zatrzymania
 Softstarty MCI są sprawdzonym rozwiązaniem dla łagodnego rozruchu 3 fazowych asynchronicznych silników klatkowych, utrzymującym prądy rozruchowe na rozsądnym poziomie, co prowadzi do wydłużenia bezawaryjnej
Softstarty MCI są sprawdzonym rozwiązaniem dla łagodnego rozruchu 3 fazowych asynchronicznych silników klatkowych, utrzymującym prądy rozruchowe na rozsądnym poziomie, co prowadzi do wydłużenia bezawaryjnej
Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, Spis treści
 Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, 2016 Spis treści Wykaz ważniejszych oznaczeń 11 Od autora 13 Wstęp 15 Rozdział 1. Wprowadzenie 17 1.1. Pojęcia ogólne. Klasyfikacja pojazdów
Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, 2016 Spis treści Wykaz ważniejszych oznaczeń 11 Od autora 13 Wstęp 15 Rozdział 1. Wprowadzenie 17 1.1. Pojęcia ogólne. Klasyfikacja pojazdów
Dla nowoczesnych zespołów napędowych TOOLFLEX. Sprzęgło mieszkowe TOOLFLEX RADEX-NC ROTEX GS
 przęgło mieszkowe ROTEX G TOOLFLEX RADEX-NC 119 przęgło mieszkowe przęgło sprawdziło się już wielokrotnie (sprzęgło mieszkowe). Najbardziej istotnymi cechami są: dobra kompensacja odchyłek (osiowej, promieniowej
przęgło mieszkowe ROTEX G TOOLFLEX RADEX-NC 119 przęgło mieszkowe przęgło sprawdziło się już wielokrotnie (sprzęgło mieszkowe). Najbardziej istotnymi cechami są: dobra kompensacja odchyłek (osiowej, promieniowej
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ
 Postępy Nauki i Techniki nr 12, 2012 Jakub Lisiecki *, Paweł Rosa *, Szymon Lisiecki * STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ Streszczenie.
Postępy Nauki i Techniki nr 12, 2012 Jakub Lisiecki *, Paweł Rosa *, Szymon Lisiecki * STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ Streszczenie.
PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE
 ĆWICZENIE 5) BADANIE REGULATORA PI W UKŁADZIE STEROWANIA PRĘDKOŚCIĄ OBROTOWĄ SILNIKA PRĄDU STAŁEGO PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE ZAPOZNANIE SIĘ Z TREŚCIĄ INSTRUKCJI CEL ĆWICZENIA:
ĆWICZENIE 5) BADANIE REGULATORA PI W UKŁADZIE STEROWANIA PRĘDKOŚCIĄ OBROTOWĄ SILNIKA PRĄDU STAŁEGO PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE ZAPOZNANIE SIĘ Z TREŚCIĄ INSTRUKCJI CEL ĆWICZENIA:
MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1. Zbigniew Krzemiński, MMB Drives sp. z o.o.
 Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wymagania edukacyjne dla uczniów kl. IV f TE ZS Nr 1 w Olkuszu
 Wymagania edukacyjne dla uczniów kl. IV f TE ZS Nr 1 w Olkuszu z przedmiotu : Eksploatacja maszyn, urządzeń i instalacji elektrycznych na podstawie programu nauczania : TECHNIK ELEKTRYK Nr programu : 311303
Wymagania edukacyjne dla uczniów kl. IV f TE ZS Nr 1 w Olkuszu z przedmiotu : Eksploatacja maszyn, urządzeń i instalacji elektrycznych na podstawie programu nauczania : TECHNIK ELEKTRYK Nr programu : 311303
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
SPRZĘGŁA MIMOŚRODOWE INKOMA TYP KWK Inkocross
 - 2 - Spis treści 1.1 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje ogólne... - 3-1.2 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje techniczne... - 4-1.3 Sprzęgło mimośrodowe
- 2 - Spis treści 1.1 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje ogólne... - 3-1.2 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje techniczne... - 4-1.3 Sprzęgło mimośrodowe
Wprowadzenie do mechatroniki
 Człony wykonawcze Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Urządzenia nastawcze aktuatory elektro-mechaniczne Urządzenia nastawcze - wykorzystywane do wykonywania ruchów lub
Człony wykonawcze Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Urządzenia nastawcze aktuatory elektro-mechaniczne Urządzenia nastawcze - wykorzystywane do wykonywania ruchów lub
Hamulce elektromagnetyczne. EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie
 Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
SIŁOWNIKI ŚRUBOWE FIRMY INKOMA - GROUP
 - 2 - Spis treści 1. Siłowniki śrubowe ALBERT typ SGT 5 SGT 1000 ze śrubą toczną lub śrubą z gwintem trapezowym symetrycznym... - 3-2. Siłowniki śrubowe ALBERT typ SGT 5 SGT 1000 - warianty wykonania...
- 2 - Spis treści 1. Siłowniki śrubowe ALBERT typ SGT 5 SGT 1000 ze śrubą toczną lub śrubą z gwintem trapezowym symetrycznym... - 3-2. Siłowniki śrubowe ALBERT typ SGT 5 SGT 1000 - warianty wykonania...
PROJEKTOWANIE MECHATRONICZNE
 Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
AIR II stopień pytania na egzamin dyplomowy (22.03.2012)
") AIR II stopień pytania na egzamin dyplomowy (22.03.2012) GRUPA A 1. Na czym polega metoda elementów skończonych (MES). 2. Omów pojęcie współczynnika bezpieczeństwa. 3. Z jakich warunków równowagi wyznacza
AIR II stopień pytania na egzamin dyplomowy (22.03.2012) GRUPA A 1. Na czym polega metoda elementów skończonych (MES). 2. Omów pojęcie współczynnika bezpieczeństwa. 3. Z jakich warunków równowagi wyznacza