Tra r n a s n fo f rm r a m c a ja a na n p a rę r ż ę eń e pomi m ę i d ę zy y uk u ł k a ł d a am a i m i obr b ó r cony n m y i m
|
|
|
- Aniela Stankiewicz
- 6 lat temu
- Przeglądów:
Transkrypt
1 Wytrzymałość materiałów Naprężenia główne na przykładzie płaskiego stanu naprężeń 1
2 Tensor naprężeń Naprężenia w stanie przestrzennym: τ τxz τ yx τ yz τzx τzy zz Układ współrzędnych jest zwykle wybrany w ten sposób, że os z ma kierunek pionowy, a osie x i y zlokalizowane są w płaszczyźnie poziomej. Kierunek osi x i y też jest dobierany zwykle na podstawie pewnych przesłanek, np. wzdłuż osi belki. Z tymże te kierunki nie muszą być najważniejszymi i nie ma powodu, żeby sprawdzać inne kierunki lub szukać zastępczych naprężeń według hipotez wytrzymałościowych.
3 Płaski stan naprężenia Można dobrać w taki sposób układ współrzędnych, że naprężenia normalne przyjmą wartości ekstremalne a naprężenia styczne przyjmą wartości zerowe. Naprężenia normalne w takim układzie są nazywane naprężeniami głównymi, a kierunki osi kierunkami głównymi. Metody poszukiwania kierunków głównych zostaną wykonane na przykładzie płaskiego stanu naprężeń (PSN). Naprężenia w PSN w dowolnym układzie współrzędnych: τ yx τ
4 Transformacja naprężeń pomiędzy układami obróconymi Zależność pomiędzy składowymi tensora stanu naprężeń zostanie wyprowadzona na podstawie równowagi elementu o szerokości b. Zestawienie podstawowych zależności: BC dt da b dt da x b dx da y b dy dx dy ( ) cos dt dt b dx b dy ( ) cos b dt b dt da ( ) x da y cos da da sin ( ) sin ( ) sin ( )
5 Transformacja naprężeń pomiędzy układami obróconymi Naprężenia na ścianie ukośnej można rozłożyć na kierunki osi x i y tak jak jest to pokazane na rysunku z prawej strony zgodnie z następującymi zależności: y x sin ( ) cos( ) oraz τ x sin ( ) cos( ) τ τ y τ
6 Transformacja naprężeń pomiędzy układami obróconymi Suma rzutów składowych sił na kierunek osi x: b dy b dy da b dx da b dt da y x b dx τ da cos da sin yx ( ) ( ) Po uwzględnieniu powyższych zależności mamy: da cos da τ x ( ) da sin( ) + da x 0 b dt τ τ yx + x + b dt x 0 BC dt Ostatecznie: ( ) sin( ) τ τ + 0 cos yx x x
7 Transformacja naprężeń pomiędzy układami obróconymi Suma rzutów składowych sił na kierunek osi y: b dx b dy da b dx da b dt da y x b dy τ da cos da sin ( ) ( ) Po uwzględnieniu powyższych zależności mamy: da sin + da τ + b dt τ ( ) da cos( ) y + da y 0 τ y + + b dt y 0 BC dt Ostatecznie: ( ) cos( ) τ + τ + 0 sin y y
8 Transformacja naprężeń pomiędzy układami obróconymi Zestawienie równań równowagi: ( ) sin( ) τ yx τ x + x 0 ( ) cos( ) τ + τ + 0 cos sin Składowe naprężeń są równe: cos τ x x τ sin ( ) ( ) y τ y τ Zestawienie równań równowagi: τ τ yx y sin cos ( ) ( ) ( ) τ sin( ) τ sin( ) + cos( ) 0 ( ) τ cos( ) + τ cos( ) + sin( ) 0 cos sin y
9 Transformacja naprężeń pomiędzy układami obróconymi Zestawienie równań równowagi: ( ) τ sin( ) τ sin( ) + cos( ) 0 ( ) τ cos( ) + τ cos( ) + sin( ) 0 cos sin Z powyższego układu równań wyznaczamy i τ, które są równe: cos ( ) + sin ( ) + τ sin( ) cos( ) ( ) cos( ) sin( ) τ sin ( ) cos ( ) [ ] τ
10 Transformacja naprężeń pomiędzy układami obróconymi Naprężenia w układzie współrzędnych obróconym o są równe: cos ( ) + sin ( ) + τ sin( ) cos( ) ( ) cos ( ) sin ( ) τ sin ( ) cos ( ) [ ] τ τ sin Podstawiając do powyższych równań zależności: sin 1 cos ( ) ( ) ( ) cos( ) sin( ) otrzymamy: cos cos 1+ cos ( ) ( ) ( ) cos ( ) sin ( ) + + cos τ sin( ) τ cos( ) ( ) + τ sin( )
11 Transformacja naprężeń pomiędzy układami obróconymi Naprężenia w układzie współrzędnych obróconym o są równe: + n + cos ( ) + τ sin( ) + t + cos τ sin τ sin( ) τ cos( ) ( ) ( )
12 Naprężenia i kierunki główne naprężeń Naprężenia główne są naprężenia, które przyjmują wartości ekstremalne. Ekstremum występuje wtedy, gdy pochodna względem zmiennej funkcji (w tym przypadku względem kąta ) ) jest równa zero. Pochodna względem opisana jest wzorem: d ( ) sin( ) + τ cos( ) d 0 0 sin o + τ cos d d ( ) ( ) ( ) o Kąt pomiędzy osiami dowolnego układu współrzędnych i kierunkami głównymi czyli pomiędzy x i n: tan ( ) o τ o
13 Naprężenia i kierunki główne naprężeń Naprężenia w układzie z kierunkami głównymi są równe: + ( ) + τ sin( ) n + cos o a kąt o musi spełnić równanie: tan ( ) o τ + t + cos o τ sin τ sin( o ) τ cos( o ) ( ) ( ) o o
14 Naprężenia i kierunki główne naprężeń Naprężenia w układzie z kierunkami głównymi są równe: n t τ τ + τ Naprężenia normalne wzdłuż kierunków głównych przyjmują wartości ekstremalne, a naprężenia styczne są równe zero.
15 Koło Mohra dla naprężeń Naprężenia główne można wyznaczyć na podstawie koła Mohra, które wyznaczamy za pomocą dwóch punktów A i B. Punkty A i B umieszczamy w układzie współrzędnych o osiach i τ.. Punkty te mają następujące współrzędne A(, τ ) i B(, -τ ).
16 Koło Mohra dla naprężeń Naprężenia względem dowolnych osi na podstawie koła Mohra są opisane za pomocą współrzędnych dwóch punktów A i B, które są punktami przecięcia koła Mohra oraz średnicy obróconej o kat, gdzie jest katem pomiędzy osiami układów współrzędnych.
17 Koło Mohra dla naprężeń Wzór na naprężenia główne: + max ± + τ min Długości odcinków na rysunku: OD AC + BC τ ( AB ) ( AC ) + ( BC ) AB ( ) + ( τ ) min OE OD ED max OF OD + ED
18 Koło Mohra dla naprężeń Wzór na naprężenia główne na podstawie Koła Mohra: max OD ± min ED AB OD max min max min AB ED ( ) + ( τ ) ± ± 1 ( ) + ( τ ) + τ
19 Analogia pomiędzy momentami bezwładności i naprężeniami Wzory transformacji pomiędzy dowolnymi układami obróconymi o kąt : momenty bezwładności J + J J J ξ η ξ η J x + cos( ) + J ξη sin( ) J + J J J J ξ η ξ η + cos ( ) J ξη sin ( ) y J η J ξ sin ( ) J cos ( ) J ξη naprężenia + n + cos + t + cos τ sin τ sin( ) τ cos( ) ( ) + τ sin( ) ( ) ( )
20 Analogia pomiędzy momentami bezwładności i naprężeniami Położenie osi głównych oraz wartości ekstremalne wartości głównych : momenty bezwładności I max min J tan Iξ + Iη Iξ Iη ± + I 0 ( ) o J J ξ ξη J η ξη momenty bezwładności względem osi są zawsze dodatnie naprężenia τ max min tan 0 ( ) o + τ ± + τ naprężenia mogą przyjmować wartości ujemne
21 Przykład wyznaczyć naprężenia i kierunki główne naprężeń Dane: Naprężenia główne: + max ± min Wzór na wyznaczenie kierunków głównych: 35.00kPa kPa τ τ yx kPa tan ( ) o τ + τ
22 Przykład wyznaczyć naprężenia i kierunki główne naprężeń Dane: 35.00kPa kPa τ τ yx kPa Naprężenia główne: max min kPa 0.695kPa 35.00kPa kPa max ± + min Wzór na wyznaczenie kierunków głównych: τ kPa tan( o ) tan( o ) 35.00kPa kPa ± + τ ( kPa)
23 Przykład wyznaczyć naprężenia i kierunki główne naprężeń Naprężenia główne: 35.00kPa 0.695kPa 35.00kPa kPa max ± + min max kPa ± kPa min max kPa min kPa Wzór na wyznaczenie kierunków głównych: ( kPa) kPa tan o 35.00kPa kPa ( ) o o o o τ o 0



24 Przykład składowe tensora naprężeń dla całej tarczy
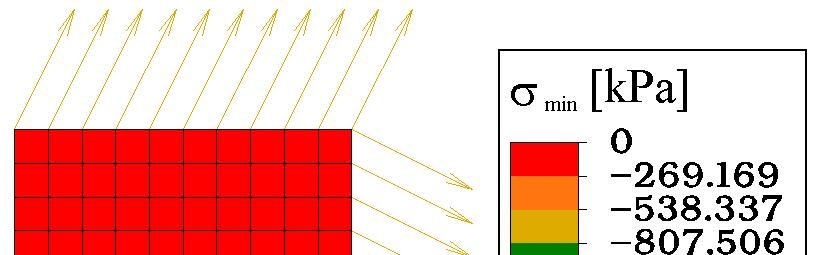


25 Przykład naprężenia główne dla całej tarczy
26 Koniec 6
TENSOMETRIA ZARYS TEORETYCZNY
 TENSOMETRIA ZARYS TEORETYCZNY Stan naprężenia jest niemożliwy do pomiaru, natomiast łatwo zmierzyć stan odkształcenia na powierzchni zewnętrznej badanej konstrukcji. Aby wyznaczyć stan naprężenia trzeba
TENSOMETRIA ZARYS TEORETYCZNY Stan naprężenia jest niemożliwy do pomiaru, natomiast łatwo zmierzyć stan odkształcenia na powierzchni zewnętrznej badanej konstrukcji. Aby wyznaczyć stan naprężenia trzeba
3. PŁASKI STAN NAPRĘŻENIA I ODKSZTAŁCENIA
 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA 1 3. 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA Analizując płaski stan naprężenia posługujemy się składowymi tensora naprężenia w postaci wektora {,,y } (3.1) Za dodatnie
3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA 1 3. 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA Analizując płaski stan naprężenia posługujemy się składowymi tensora naprężenia w postaci wektora {,,y } (3.1) Za dodatnie
PYTANIA KONTROLNE STAN NAPRĘŻENIA, ODKSZTAŁCENIA PRAWO HOOKE A
 PYTANIA KONTROLNE STAN NAPRĘŻENIA, ODKSZTAŁCENIA PRAWO HOOKE A TENSOMETRIA ZARYS TEORETYCZNY Stan naprężenia jest niemożliwy do pomiaru, natomiast łatwo zmierzyć stan odkształcenia na powierzchni zewnętrznej
PYTANIA KONTROLNE STAN NAPRĘŻENIA, ODKSZTAŁCENIA PRAWO HOOKE A TENSOMETRIA ZARYS TEORETYCZNY Stan naprężenia jest niemożliwy do pomiaru, natomiast łatwo zmierzyć stan odkształcenia na powierzchni zewnętrznej
Wprowadzenie do WK1 Stan naprężenia
 Wytrzymałość materiałów i konstrukcji 1 Wykład 1 Wprowadzenie do WK1 Stan naprężenia Płaski stan naprężenia Dr inż. Piotr Marek Wytrzymałość Konstrukcji (Wytrzymałość materiałów, Mechanika konstrukcji)
Wytrzymałość materiałów i konstrukcji 1 Wykład 1 Wprowadzenie do WK1 Stan naprężenia Płaski stan naprężenia Dr inż. Piotr Marek Wytrzymałość Konstrukcji (Wytrzymałość materiałów, Mechanika konstrukcji)
Przykład 4.2. Sprawdzenie naprężeń normalnych
 Przykład 4.. Sprawdzenie naprężeń normalnych Sprawdzić warunki nośności przekroju ze względu na naprężenia normalne jeśli naprężenia dopuszczalne są równe: k c = 0 MPa k r = 80 MPa 0, kn 0 kn m 0,5 kn/m
Przykład 4.. Sprawdzenie naprężeń normalnych Sprawdzić warunki nośności przekroju ze względu na naprężenia normalne jeśli naprężenia dopuszczalne są równe: k c = 0 MPa k r = 80 MPa 0, kn 0 kn m 0,5 kn/m
Dr inż. Janusz Dębiński
 Wytrzymałość materiałów ćwiczenia projektowe 5. Projekt numer 5 przykład 5.. Temat projektu Na rysunku 5.a przedstawiono belkę swobodnie podpartą wykorzystywaną w projekcie numer 5 z wytrzymałości materiałów.
Wytrzymałość materiałów ćwiczenia projektowe 5. Projekt numer 5 przykład 5.. Temat projektu Na rysunku 5.a przedstawiono belkę swobodnie podpartą wykorzystywaną w projekcie numer 5 z wytrzymałości materiałów.
Wytrzymałość materiałów
 Wytrzymałość materiałów Wykład 3 Analiza stanu naprężenia i odkształcenia w przekroju pręta Poznań 1 3.1. Podstawowe założenia Charakterystyka materiału Zakładamy na początek, że mamy do czynienia z ośrodkiem
Wytrzymałość materiałów Wykład 3 Analiza stanu naprężenia i odkształcenia w przekroju pręta Poznań 1 3.1. Podstawowe założenia Charakterystyka materiału Zakładamy na początek, że mamy do czynienia z ośrodkiem
Przykład 4.1. Ściag stalowy. L200x100x cm 10 cm I120. Obliczyć dopuszczalną siłę P rozciagającą ściąg stalowy o przekroju pokazanym na poniższym
 Przykład 4.1. Ściag stalowy Obliczyć dopuszczalną siłę P rozciagającą ściąg stalowy o przekroju pokazanym na poniższym rysunku jeśli naprężenie dopuszczalne wynosi 15 MPa. Szukana siła P przyłożona jest
Przykład 4.1. Ściag stalowy Obliczyć dopuszczalną siłę P rozciagającą ściąg stalowy o przekroju pokazanym na poniższym rysunku jeśli naprężenie dopuszczalne wynosi 15 MPa. Szukana siła P przyłożona jest
Przykład Łuk ze ściągiem, obciążenie styczne. D A
 Przykład 1.4. Łuk ze ściągiem, obciążenie styczne. Rysunek przedstawia łuk trójprzegubowy, kołowy, ze ściągiem. Łuk obciążony jest obciążeniem stycznym do łuku, o stałej gęstości na jednostkę długości
Przykład 1.4. Łuk ze ściągiem, obciążenie styczne. Rysunek przedstawia łuk trójprzegubowy, kołowy, ze ściągiem. Łuk obciążony jest obciążeniem stycznym do łuku, o stałej gęstości na jednostkę długości
Defi f nicja n aprę r żeń
 Wytrzymałość materiałów Stany naprężeń i odkształceń 1 Definicja naprężeń Mamy bryłę materialną obciążoną układem sił (siły zewnętrzne, reakcje), będących w równowadze. Rozetniemy myślowo tę bryłę na dwie
Wytrzymałość materiałów Stany naprężeń i odkształceń 1 Definicja naprężeń Mamy bryłę materialną obciążoną układem sił (siły zewnętrzne, reakcje), będących w równowadze. Rozetniemy myślowo tę bryłę na dwie
2. Charakterystyki geometryczne przekroju
 . CHRKTERYSTYKI GEOMETRYCZNE PRZEKROJU 1.. Charakterystyki geometryczne przekroju.1 Podstawowe definicje Z przekrojem pręta związane są trzy wielkości fizyczne nazywane charakterystykami geometrycznymi
. CHRKTERYSTYKI GEOMETRYCZNE PRZEKROJU 1.. Charakterystyki geometryczne przekroju.1 Podstawowe definicje Z przekrojem pręta związane są trzy wielkości fizyczne nazywane charakterystykami geometrycznymi
7. WYZNACZANIE SIŁ WEWNĘTRZNYCH W BELKACH
 7. WYZNCZNIE SIŁ WEWNĘTRZNYCH W ELKCH Zadanie 7.1 Dla belki jak na rysunku 7.1.1 ułożyć równania sił wewnętrznych i sporządzić ich wykresy. Dane: q, a, M =. Rys.7.1.1 Rys.7.1. W zależności od rodzaju podpór
7. WYZNCZNIE SIŁ WEWNĘTRZNYCH W ELKCH Zadanie 7.1 Dla belki jak na rysunku 7.1.1 ułożyć równania sił wewnętrznych i sporządzić ich wykresy. Dane: q, a, M =. Rys.7.1.1 Rys.7.1. W zależności od rodzaju podpór
Zadanie 3. Belki statycznie wyznaczalne. Dla belek statycznie wyznaczalnych przedstawionych. na rysunkach rys.a, rys.b, wyznaczyć:
 adanie 3. elki statycznie wyznaczalne. 15K la belek statycznie wyznaczalnych przedstawionych na rysunkach rys., rys., wyznaczyć: 18K 0.5m 1.5m 1. składowe reakcji podpór, 2. zapisać funkcje sił przekrojowych,
adanie 3. elki statycznie wyznaczalne. 15K la belek statycznie wyznaczalnych przedstawionych na rysunkach rys., rys., wyznaczyć: 18K 0.5m 1.5m 1. składowe reakcji podpór, 2. zapisać funkcje sił przekrojowych,
Al.Politechniki 6, Łódź, Poland, Tel/Fax (48) (42) Mechanika Budowli. Inżynieria Środowiska, sem. III
 (42) Mechanika Budowli. Inżynieria Środowiska, sem. III") KATEDRA MECHANIKI MATERIAŁÓW POLITECHNIKA ŁÓDZKA DEPARTMENT OF MECHANICS OF MATERIALS TECHNICAL UNIVERSITY OF ŁÓDŹ Al.Politechniki 6, 93-590 Łódź, Poland, Tel/Fax (48) (42) 631 35 51 Mechanika Budowli
KATEDRA MECHANIKI MATERIAŁÓW POLITECHNIKA ŁÓDZKA DEPARTMENT OF MECHANICS OF MATERIALS TECHNICAL UNIVERSITY OF ŁÓDŹ Al.Politechniki 6, 93-590 Łódź, Poland, Tel/Fax (48) (42) 631 35 51 Mechanika Budowli
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2014/15
 Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2014/15 1. Warunkiem koniecznym i wystarczającym równowagi układu sił zbieżnych jest, aby a) wszystkie
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2014/15 1. Warunkiem koniecznym i wystarczającym równowagi układu sił zbieżnych jest, aby a) wszystkie
2. Pręt skręcany o przekroju kołowym
 2. Pręt skręcany o przekroju kołowym Przebieg wykładu : 1. Sformułowanie zagadnienia 2. Warunki równowagi kąt skręcenia 3. Warunek geometryczny kąt odkształcenia postaciowego 4. Związek fizyczny Prawo
2. Pręt skręcany o przekroju kołowym Przebieg wykładu : 1. Sformułowanie zagadnienia 2. Warunki równowagi kąt skręcenia 3. Warunek geometryczny kąt odkształcenia postaciowego 4. Związek fizyczny Prawo
Przykład 1 Dany jest płaski układ czterech sił leżących w płaszczyźnie Oxy. Obliczyć wektor główny i moment główny tego układu sił.
 Przykład 1 Dany jest płaski układ czterech sił leżących w płaszczyźnie Oxy Obliczyć wektor główny i moment główny tego układu sił. Wektor główny układu sił jest równy Moment główny układu wynosi Przykład
Przykład 1 Dany jest płaski układ czterech sił leżących w płaszczyźnie Oxy Obliczyć wektor główny i moment główny tego układu sił. Wektor główny układu sił jest równy Moment główny układu wynosi Przykład
MECHANIKA PRĘTÓW CIENKOŚCIENNYCH
 dr inż. Robert Szmit Przedmiot: MECHANIKA PRĘTÓW CIENKOŚCIENNYCH WYKŁAD nr Uniwersytet Warmińsko-Mazurski w Olsztynie Katedra Geotechniki i Mechaniki Budowli Opis stanu odkształcenia i naprężenia powłoki
dr inż. Robert Szmit Przedmiot: MECHANIKA PRĘTÓW CIENKOŚCIENNYCH WYKŁAD nr Uniwersytet Warmińsko-Mazurski w Olsztynie Katedra Geotechniki i Mechaniki Budowli Opis stanu odkształcenia i naprężenia powłoki
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2015/16
 Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2015/16 1. Warunkiem koniecznym i wystarczającym równowagi układu sił zbieżnych jest, aby a) wszystkie
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2015/16 1. Warunkiem koniecznym i wystarczającym równowagi układu sił zbieżnych jest, aby a) wszystkie
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
Analiza stanu naprężenia - pojęcia podstawowe
 10. ANALIZA STANU NAPRĘŻENIA - POJĘCIA PODSTAWOWE 1 10. 10. Analiza stanu naprężenia - pojęcia podstawowe 10.1 Podstawowy zapisu wskaźnikowego Elementy konstrukcji znajdują się w przestrzeni fizycznej.
10. ANALIZA STANU NAPRĘŻENIA - POJĘCIA PODSTAWOWE 1 10. 10. Analiza stanu naprężenia - pojęcia podstawowe 10.1 Podstawowy zapisu wskaźnikowego Elementy konstrukcji znajdują się w przestrzeni fizycznej.
Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów
 1. Kratownica Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów 2. Szkic projektu rysunek jest w skali True 3. Ustalenie warunku statycznej niewyznaczalności układu Warunek
1. Kratownica Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów 2. Szkic projektu rysunek jest w skali True 3. Ustalenie warunku statycznej niewyznaczalności układu Warunek
Integralność konstrukcji w eksploatacji
 1 Integralność konstrukcji w eksploatacji Wykład 0 PRZYPOMNINI PODSTAWOWYCH POJĘĆ Z WYTRZYMAŁOŚCI MATRIAŁÓW Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości, Zmęczenia Materiałów i Konstrukcji
1 Integralność konstrukcji w eksploatacji Wykład 0 PRZYPOMNINI PODSTAWOWYCH POJĘĆ Z WYTRZYMAŁOŚCI MATRIAŁÓW Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości, Zmęczenia Materiałów i Konstrukcji
Zginanie proste belek
 Zginanie belki występuje w przypadku obciążenia działającego prostopadle do osi belki Zginanie proste występuje w przypadku obciążenia działającego w płaszczyźnie głównej zx Siły przekrojowe w belkach
Zginanie belki występuje w przypadku obciążenia działającego prostopadle do osi belki Zginanie proste występuje w przypadku obciążenia działającego w płaszczyźnie głównej zx Siły przekrojowe w belkach
2. Charakterystyki geometryczne przekroju
 . CHRKTERYSTYKI GEOMETRYCZNE PRZEKROJU 1.. Charakterystyki geometryczne przekroju.1 Podstawowe definicje Z przekrojem pręta związane są trzy wielkości fizyczne nazywane charakterystykami geometrycznymi
. CHRKTERYSTYKI GEOMETRYCZNE PRZEKROJU 1.. Charakterystyki geometryczne przekroju.1 Podstawowe definicje Z przekrojem pręta związane są trzy wielkości fizyczne nazywane charakterystykami geometrycznymi
Stan naprężenia. Przykład 1: Tarcza (płaski stan naprężenia) Określić siły masowe oraz obciążenie brzegu tarczy jeśli stan naprężenia wynosi:
 Określić siły masowe oraz obciążenie brzegu tarczy jeśli stan naprężenia wynosi:") Stan naprężenia Przkład 1: Tarcza (płaski stan naprężenia) Określić sił masowe oraz obciążenie brzegu tarcz jeśli stan naprężenia wnosi: 5 T σ. 8 Składowe sił masowch obliczam wkonując różniczkowanie zapisane
Stan naprężenia Przkład 1: Tarcza (płaski stan naprężenia) Określić sił masowe oraz obciążenie brzegu tarcz jeśli stan naprężenia wnosi: 5 T σ. 8 Składowe sił masowch obliczam wkonując różniczkowanie zapisane
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
gruparectan.pl 1. Kratownica 2. Szkic projektu 3. Ustalenie warunku statycznej niewyznaczalności układu Strona:1
 1. Kratownica Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów 2. Szkic projektu 3. Ustalenie warunku statycznej niewyznaczalności układu Warunek konieczny geometrycznej
1. Kratownica Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów 2. Szkic projektu 3. Ustalenie warunku statycznej niewyznaczalności układu Warunek konieczny geometrycznej
Siły wewnętrzne - związki różniczkowe
 Siły wewnętrzne - związki różniczkowe Weźmy dowolny fragment belki obciążony wzdłuż osi obciążeniem n(x) oraz poprzecznie obciążeniem q(x). Na powyższym rysunku zwroty obciążeń są zgodne z dodatnimi zwrotami
Siły wewnętrzne - związki różniczkowe Weźmy dowolny fragment belki obciążony wzdłuż osi obciążeniem n(x) oraz poprzecznie obciążeniem q(x). Na powyższym rysunku zwroty obciążeń są zgodne z dodatnimi zwrotami
10 zadań związanych z granicą i pochodną funkcji.
 0 zadań związanych z granicą i pochodną funkcji Znajdź przedziały monotoniczności funkcji f() 4, określonej dla (0,) W przedziale ( 0,) wyrażenie 4 przyjmuje wartości ujemne, dlatego dla (0,) funkcja f()
0 zadań związanych z granicą i pochodną funkcji Znajdź przedziały monotoniczności funkcji f() 4, określonej dla (0,) W przedziale ( 0,) wyrażenie 4 przyjmuje wartości ujemne, dlatego dla (0,) funkcja f()
Wytrzymałość Konstrukcji I - MEiL część II egzaminu. 1. Omówić wykresy rozciągania typowych materiałów. Podać charakterystyczne punkty wykresów.
 Wytrzymałość Konstrukcji I - MEiL część II egzaminu 1. Omówić wykresy rozciągania typowych materiałów. Podać charakterystyczne punkty wykresów. 2. Omówić pojęcia sił wewnętrznych i zewnętrznych konstrukcji.
Wytrzymałość Konstrukcji I - MEiL część II egzaminu 1. Omówić wykresy rozciągania typowych materiałów. Podać charakterystyczne punkty wykresów. 2. Omówić pojęcia sił wewnętrznych i zewnętrznych konstrukcji.
Z1/1. ANALIZA BELEK ZADANIE 1
 05/06 Z1/1. NLIZ LK ZNI 1 1 Z1/1. NLIZ LK ZNI 1 Z1/1.1 Zadanie 1 Udowodnić geometryczną niezmienność belki złożonej na rysunku Z1/1.1 a następnie wyznaczyć reakcje podporowe oraz wykresy siły poprzecznej
05/06 Z1/1. NLIZ LK ZNI 1 1 Z1/1. NLIZ LK ZNI 1 Z1/1.1 Zadanie 1 Udowodnić geometryczną niezmienność belki złożonej na rysunku Z1/1.1 a następnie wyznaczyć reakcje podporowe oraz wykresy siły poprzecznej
Materiały pomocnicze do wykładów z wytrzymałości materiałów 1 i 2 (299 stron)
") Jerzy Wyrwał Materiały pomocnicze do wykładów z wytrzymałości materiałów 1 i 2 (299 stron) Uwaga. Załączone materiały są pomyślane jako pomoc do zrozumienia informacji podawanych na wykładzie. Zatem ich
Jerzy Wyrwał Materiały pomocnicze do wykładów z wytrzymałości materiałów 1 i 2 (299 stron) Uwaga. Załączone materiały są pomyślane jako pomoc do zrozumienia informacji podawanych na wykładzie. Zatem ich
1.1 Przegląd wybranych równań i modeli fizycznych. , u x1 x 2
 Temat 1 Pojęcia podstawowe 1.1 Przegląd wybranych równań i modeli fizycznych Równaniem różniczkowym cząstkowym rzędu drugiego o n zmiennych niezależnych nazywamy równanie postaci gdzie u = u (x 1, x,...,
Temat 1 Pojęcia podstawowe 1.1 Przegląd wybranych równań i modeli fizycznych Równaniem różniczkowym cząstkowym rzędu drugiego o n zmiennych niezależnych nazywamy równanie postaci gdzie u = u (x 1, x,...,
Układy współrzędnych
 Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Funkcja jednej zmiennej - przykładowe rozwiązania 1. Badając przebieg zmienności funkcji postępujemy według poniższego schematu:
 Funkcja jednej zmiennej - przykładowe rozwiązania Zadanie 4 c) Badając przebieg zmienności funkcji postępujemy według poniższego schematu:. Analiza funkcji: (a) Wyznaczenie dziedziny funkcji (b) Obliczenie
Funkcja jednej zmiennej - przykładowe rozwiązania Zadanie 4 c) Badając przebieg zmienności funkcji postępujemy według poniższego schematu:. Analiza funkcji: (a) Wyznaczenie dziedziny funkcji (b) Obliczenie
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Matematyka z el. statystyki, # 4 /Geodezja i kartografia I/
 Matematyka z el. statystyki, # 4 /Geodezja i kartografia I/ dr n. mat. Zdzisław Otachel Uniwersytet Przyrodniczy w Lublinie Katedra Zastosowań Matematyki i Informatyki ul. Akademicka 15, p.211a, bud. Agro
Matematyka z el. statystyki, # 4 /Geodezja i kartografia I/ dr n. mat. Zdzisław Otachel Uniwersytet Przyrodniczy w Lublinie Katedra Zastosowań Matematyki i Informatyki ul. Akademicka 15, p.211a, bud. Agro
STATYCZNA PRÓBA SKRĘCANIA
 Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego: Wprowadzenie STATYCZNA PRÓBA SKRĘCANIA Opracowała: mgr inż. Magdalena Bartkowiak-Jowsa Skręcanie pręta występuje w przypadku
Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego: Wprowadzenie STATYCZNA PRÓBA SKRĘCANIA Opracowała: mgr inż. Magdalena Bartkowiak-Jowsa Skręcanie pręta występuje w przypadku
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
WYMAGANIA EDUKACYJNE Z PRZEDMIOTU: KONSTRUKCJE BUDOWLANE klasa III Podstawa opracowania: PROGRAM NAUCZANIA DLA ZAWODU TECHNIK BUDOWNICTWA 311204
 WYMAGANIA EDUKACYJNE Z PRZEDMIOTU: KONSTRUKCJE BUDOWLANE klasa III Podstawa opracowania: PROGRAM NAUCZANIA DLA ZAWODU TECHNIK BUDOWNICTWA 311204 1 DZIAŁ PROGRAMOWY V. PODSTAWY STATYKI I WYTRZYMAŁOŚCI MATERIAŁÓW
WYMAGANIA EDUKACYJNE Z PRZEDMIOTU: KONSTRUKCJE BUDOWLANE klasa III Podstawa opracowania: PROGRAM NAUCZANIA DLA ZAWODU TECHNIK BUDOWNICTWA 311204 1 DZIAŁ PROGRAMOWY V. PODSTAWY STATYKI I WYTRZYMAŁOŚCI MATERIAŁÓW
Przykład 7.3. Belka jednoprzęsłowa z dwoma wspornikami
 Przykład.. eka jednoprzęsłowa z dwoma wspornikami Narysować wykresy sił przekrojowych da poniższej beki. α Rozwiązanie Rozwiązywanie zadania rozpocząć naeży od oznaczenia punktów charakterystycznych, składowych
Przykład.. eka jednoprzęsłowa z dwoma wspornikami Narysować wykresy sił przekrojowych da poniższej beki. α Rozwiązanie Rozwiązywanie zadania rozpocząć naeży od oznaczenia punktów charakterystycznych, składowych
PODSTAWY WYTRZYMAŁOŚCI MATERIAŁÓW (POWYM)
") PODSTAWY WYTRZYMAŁOŚCI MATERIAŁÓW (POWYM) Automatyka i Robotyka Sem. 3 Dr inŝ. Anna DĄBROWSKA-TKACZYK (4,, 8, 5) X; (8, 3,, 9) XI; (6, 3, 0), XII; (3, 0, 7, 4) I 3 XI (wtorek) zamiast 5 XI (czwartek) Dzień
PODSTAWY WYTRZYMAŁOŚCI MATERIAŁÓW (POWYM) Automatyka i Robotyka Sem. 3 Dr inŝ. Anna DĄBROWSKA-TKACZYK (4,, 8, 5) X; (8, 3,, 9) XI; (6, 3, 0), XII; (3, 0, 7, 4) I 3 XI (wtorek) zamiast 5 XI (czwartek) Dzień
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Materiały do wykładu na temat Obliczanie sił przekrojowych, naprężeń i zmian geometrycznych prętów rozciąganych iściskanych bez wyboczenia.
 Materiały do wykładu na temat Obliczanie sił przekrojowych naprężeń i zmian geometrycznych prętów rozciąganych iściskanych bez wyboczenia. Sprawdzanie warunków wytrzymałości takich prętów. Wydruk elektroniczny
Materiały do wykładu na temat Obliczanie sił przekrojowych naprężeń i zmian geometrycznych prętów rozciąganych iściskanych bez wyboczenia. Sprawdzanie warunków wytrzymałości takich prętów. Wydruk elektroniczny
w stanie granicznym nośności
 Wytrzyałość ateriałów Hipotezy wytrzyałościowe 1 Podstawy wyiarowania w stanie graniczny nośności Wyiarowanie konstrukcji polega na doborze wyiarów i kształtu przekrojów eleentów. Podstawą doboru jest
Wytrzyałość ateriałów Hipotezy wytrzyałościowe 1 Podstawy wyiarowania w stanie graniczny nośności Wyiarowanie konstrukcji polega na doborze wyiarów i kształtu przekrojów eleentów. Podstawą doboru jest
Mechanika teoretyczna
 Siła skupiona Mechanika teoretyczna Wykłady nr 5 Obliczanie sił wewnętrznych w belkach przykłady 1 2 Moment skupiony Obciążenie ciągłe równomierne 3 4 Obciążenie ciągłe liniowo zmienne Obciążenie ciągłe
Siła skupiona Mechanika teoretyczna Wykłady nr 5 Obliczanie sił wewnętrznych w belkach przykłady 1 2 Moment skupiony Obciążenie ciągłe równomierne 3 4 Obciążenie ciągłe liniowo zmienne Obciążenie ciągłe
Wykład 2. Kinematyka. Podstawowe wielkości opisujące ruch. W tekście tym przedstawię podstawowe pojecia niezbędne do opiosu ruchu:
 Wykład 2. Kinematyka. Aby prześledzić tok tego wykładu MUSISZ rozumieć pojęcie wektora, jego składowych w układzie kartezjańskim oraz w trakcie wykładu zrozumieć intuicyjnie pojęcie pochodnej funkcji jednej
Wykład 2. Kinematyka. Aby prześledzić tok tego wykładu MUSISZ rozumieć pojęcie wektora, jego składowych w układzie kartezjańskim oraz w trakcie wykładu zrozumieć intuicyjnie pojęcie pochodnej funkcji jednej
Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1. MECHANIKA OGÓLNA - lista zadań 2016/17
 Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1 MECHANIKA OGÓLNA - lista zadań 2016/17 Część 1 analiza kinematyczna układów płaskich Przeprowadzić analizę kinematyczną układu. Odpowiednią
Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1 MECHANIKA OGÓLNA - lista zadań 2016/17 Część 1 analiza kinematyczna układów płaskich Przeprowadzić analizę kinematyczną układu. Odpowiednią
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
Politechnika Białostocka INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Temat ćwiczenia: Próba skręcania pręta o przekroju okrągłym Numer ćwiczenia: 4 Laboratorium z
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Temat ćwiczenia: Próba skręcania pręta o przekroju okrągłym Numer ćwiczenia: 4 Laboratorium z
1 Pochodne wyższych rzędów
 Pochodne wyższych rzędów Pochodną rzędu drugiego lub drugą pochodną funkcji y = f(x) nazywamy pochodną pierwszej pochodnej tej funkcji. Analogicznie definiujemy pochodne wyższych rzędów, jako pochodne
Pochodne wyższych rzędów Pochodną rzędu drugiego lub drugą pochodną funkcji y = f(x) nazywamy pochodną pierwszej pochodnej tej funkcji. Analogicznie definiujemy pochodne wyższych rzędów, jako pochodne
Przepływy laminarne - zadania
 Zadanie 1 Warstwa cieczy o wysokości = 3mm i lepkości v = 1,5 10 m /s płynie równomiernie pod działaniem siły ciężkości po płaszczyźnie nachylonej do poziomu pod kątem α = 15. Wyznaczyć: a) Rozkład prędkości.
Zadanie 1 Warstwa cieczy o wysokości = 3mm i lepkości v = 1,5 10 m /s płynie równomiernie pod działaniem siły ciężkości po płaszczyźnie nachylonej do poziomu pod kątem α = 15. Wyznaczyć: a) Rozkład prędkości.
Statyka płynów - zadania
 Zadanie 1 Wyznaczyć rozkład ciśnień w cieczy znajdującej się w stanie spoczynku w polu sił ciężkości. Ponieważ na cząsteczki cieczy działa wyłącznie siła ciężkości, więc składowe wektora jednostkowej siły
Zadanie 1 Wyznaczyć rozkład ciśnień w cieczy znajdującej się w stanie spoczynku w polu sił ciężkości. Ponieważ na cząsteczki cieczy działa wyłącznie siła ciężkości, więc składowe wektora jednostkowej siły
ĆWICZENIE 2 WYKRESY sił przekrojowych dla belek prostych
 ĆWICZENIE 2 WYKRESY sił przekrojowych dla belek prostych bez pisania funkcji Układ płaski - konwencja zwrotu osi układu domniemany globalny układ współrzędnych ze zwrotem osi jak na rysunku (nawet jeśli
ĆWICZENIE 2 WYKRESY sił przekrojowych dla belek prostych bez pisania funkcji Układ płaski - konwencja zwrotu osi układu domniemany globalny układ współrzędnych ze zwrotem osi jak na rysunku (nawet jeśli
Wytrzymałość Materiałów
 Wytrzymałość Materiałów Zginanie Wyznaczanie sił wewnętrznych w belkach i ramach, analiza stanu naprężeń i odkształceń, warunek bezpieczeństwa Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości,
Wytrzymałość Materiałów Zginanie Wyznaczanie sił wewnętrznych w belkach i ramach, analiza stanu naprężeń i odkształceń, warunek bezpieczeństwa Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości,
Obliczanie długości łuku krzywych. Autorzy: Witold Majdak
 Obliczanie długości łuku krzywych Autorzy: Witold Majdak 7 Obliczanie długości łuku krzywych Autor: Witold Majdak DEFINICJA Definicja : Długość łuku krzywej zadanej parametrycznie Rozważmy krzywą Γ zadaną
Obliczanie długości łuku krzywych Autorzy: Witold Majdak 7 Obliczanie długości łuku krzywych Autor: Witold Majdak DEFINICJA Definicja : Długość łuku krzywej zadanej parametrycznie Rozważmy krzywą Γ zadaną
1. Silos Strona:1 Dla danego układu wyznaczyć MTN metodą sił Rys. Schemat układu ...
 1. Silos Dla danego układu wyznaczyć MTN metodą sił Rys. Schemat układu... Przyjęto przekrój podstawowy: I= 3060[cm4] E= 205[GPa] Globalne EI= 6273[kNm²] Globalne EA= 809750[kN] Strona:1 2. Ustalenie stopnia
1. Silos Dla danego układu wyznaczyć MTN metodą sił Rys. Schemat układu... Przyjęto przekrój podstawowy: I= 3060[cm4] E= 205[GPa] Globalne EI= 6273[kNm²] Globalne EA= 809750[kN] Strona:1 2. Ustalenie stopnia
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów studia niestacjonarne I-go stopnia, semestr zimowy
 Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów studia niestacjonarne I-go stopnia, semestr zimowy 1. Położenie osi obojętnej przekroju rozciąganego mimośrodowo zależy od: a) punktu przyłożenia
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów studia niestacjonarne I-go stopnia, semestr zimowy 1. Położenie osi obojętnej przekroju rozciąganego mimośrodowo zależy od: a) punktu przyłożenia
Zadanie 1. Wektor naprężenia. Tensor naprężenia. Zależność wektor-tensor.
 Zadanie 1. Wektor naprężenia. Tensor naprężenia. Zależność wektor-tensor. Dany jest stan naprężenia w układzie x 1,x 2,x 3 T 11 12 13 [ ] 21 23 31 32 33 Znaleźć wektor naprężenia w płaszczyźnie o normalnej
Zadanie 1. Wektor naprężenia. Tensor naprężenia. Zależność wektor-tensor. Dany jest stan naprężenia w układzie x 1,x 2,x 3 T 11 12 13 [ ] 21 23 31 32 33 Znaleźć wektor naprężenia w płaszczyźnie o normalnej
Wykłady z Matematyki stosowanej w inżynierii środowiska, II sem. 3. CAŁKA POTRÓJNA
 Wykłady z Matematyki stosowanej w inżynierii środowiska, II sem 1 Całka potrójna po prostopadłościanie CAŁKA POTRÓJNA 2 Całka potrójna po obszarach normalnych Współrzędne walcowe 4 Współrzędne sferyczne
Wykłady z Matematyki stosowanej w inżynierii środowiska, II sem 1 Całka potrójna po prostopadłościanie CAŁKA POTRÓJNA 2 Całka potrójna po obszarach normalnych Współrzędne walcowe 4 Współrzędne sferyczne
Rozciąganie i ściskanie prętów naprężenia normalne, przemieszczenia 2
 Rozciąganie i ściskanie prętów naprężenia normane, przemieszczenia W przypadku rozciągania/ściskania pręta jego obciążenie stanowi zbiór sił czynnych wzdłuż osi pręta (oś x ). a rys..a przedstawiono przykład
Rozciąganie i ściskanie prętów naprężenia normane, przemieszczenia W przypadku rozciągania/ściskania pręta jego obciążenie stanowi zbiór sił czynnych wzdłuż osi pręta (oś x ). a rys..a przedstawiono przykład
Pochodna funkcji jednej zmiennej
 Pochodna funkcji jednej zmiennej Def:(pochodnej funkcji w punkcie) Jeśli funkcja f : D R, D R określona jest w pewnym otoczeniu punktu 0 D i istnieje skończona granica ilorazu różniczkowego: f f( ( 0 )
Pochodna funkcji jednej zmiennej Def:(pochodnej funkcji w punkcie) Jeśli funkcja f : D R, D R określona jest w pewnym otoczeniu punktu 0 D i istnieje skończona granica ilorazu różniczkowego: f f( ( 0 )
WKLĘSŁOŚĆ I WYPUKŁOŚĆ KRZYWEJ. PUNKT PRZEGIĘCIA.
 WKLĘSŁOŚĆ I WYPUKŁOŚĆ KRZYWEJ. PUNKT PRZEGIĘCIA. Załóżmy, że funkcja y f jest dwukrotnie różniczkowalna w Jeżeli Jeżeli przedziale a;b. Punkt P, f nazywamy punktem przegięcia funkcji y f wtedy i tylko
WKLĘSŁOŚĆ I WYPUKŁOŚĆ KRZYWEJ. PUNKT PRZEGIĘCIA. Załóżmy, że funkcja y f jest dwukrotnie różniczkowalna w Jeżeli Jeżeli przedziale a;b. Punkt P, f nazywamy punktem przegięcia funkcji y f wtedy i tylko
Geometria i łuku (1) Wezg z ło ł w o ia ia punkty po dpa rcia ł a uku; Klucz ( cz zwornik) najw na y jw żs ż zy z punk łuku łu ; klu kl c u z ku;
 Wezg z ło ł w o ia ia punkty po dpa rcia ł a uku; Klucz ( cz zwornik) najw na y jw żs ż zy z punk łuku łu ; klu kl c u z ku;") Mechanika ogóna Wykład nr 1 Pręty o osi zakrzywionej. Łuki. 1 Łuki, skepienia Łuk: : pręt o osi zakrzywionej (w stanie nieodkształconym) w płaszczyźnie działania sił i podparty na końcach w taki sposó,
Mechanika ogóna Wykład nr 1 Pręty o osi zakrzywionej. Łuki. 1 Łuki, skepienia Łuk: : pręt o osi zakrzywionej (w stanie nieodkształconym) w płaszczyźnie działania sił i podparty na końcach w taki sposó,
MECHANIKA 2. Praca, moc, energia. Wykład Nr 11. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
Treść ćwiczenia T6: Wyznaczanie sił wewnętrznych w belkach
 Instrukcja przygotowania i realizacji scenariusza dotyczącego ćwiczenia 6 z przedmiotu "Wytrzymałość materiałów", przeznaczona dla studentów II roku studiów stacjonarnych I stopnia w kierunku Energetyka
Instrukcja przygotowania i realizacji scenariusza dotyczącego ćwiczenia 6 z przedmiotu "Wytrzymałość materiałów", przeznaczona dla studentów II roku studiów stacjonarnych I stopnia w kierunku Energetyka
ĆWICZENIE 3 Wykresy sił przekrojowych dla ram. Zasady graficzne sporządzania wykresów sił przekrojowych dla ram
 ĆWICZENIE 3 Wykresy sił przekrojowych dla ram Zasady graficzne sporządzania wykresów sił przekrojowych dla ram Wykresy N i Q Wykres sił dodatnich może być narysowany zarówno po górnej jak i dolnej stronie
ĆWICZENIE 3 Wykresy sił przekrojowych dla ram Zasady graficzne sporządzania wykresów sił przekrojowych dla ram Wykresy N i Q Wykres sił dodatnich może być narysowany zarówno po górnej jak i dolnej stronie
Wydział Inżynierii Środowiska; kierunek Inż. Środowiska. Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni
 Wydział Inżynierii Środowiska; kierunek Inż. Środowiska Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni Tabele wzorów matematycznych i fizycznych oraz obszerniejsze listy zadań do kursu są dostępne
Wydział Inżynierii Środowiska; kierunek Inż. Środowiska Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni Tabele wzorów matematycznych i fizycznych oraz obszerniejsze listy zadań do kursu są dostępne
Mechanika teoretyczna
 Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Linie wpływu w belce statycznie niewyznaczalnej
 Prof. Mieczysław Kuczma Poznań, styczeń 215 Zakład Mechaniki Budowli, PP Linie wpływu w belce statycznie niewyznaczalnej (Przykład liczbowy) Zacznijmy od zdefiniowania pojęcia linii wpływu (używa się też
Prof. Mieczysław Kuczma Poznań, styczeń 215 Zakład Mechaniki Budowli, PP Linie wpływu w belce statycznie niewyznaczalnej (Przykład liczbowy) Zacznijmy od zdefiniowania pojęcia linii wpływu (używa się też
d J m m dt model maszyny prądu stałego
 model maszyny prądu stałego dit ut itr t Lt E u dt E c d J m m dt m e 0 m c i. O wartości wzbudzenia decyduje prąd wzbudzenia zmienną sterująca strumieniem jest i, 2. O wartości momentu decyduje prąd twornika
model maszyny prądu stałego dit ut itr t Lt E u dt E c d J m m dt m e 0 m c i. O wartości wzbudzenia decyduje prąd wzbudzenia zmienną sterująca strumieniem jest i, 2. O wartości momentu decyduje prąd twornika
Kubatury Gaussa (całka podwójna po trójkącie)
") Kubatury Gaussa (całka podwójna po trójkącie) Całka podwójna po trójkącie Dana jest funkcja dwóch zmiennych f (x, y) ciągła i ograniczona w obszarze trójkątnym D. Wierzchołki trójkąta wyznaczają punkty
Kubatury Gaussa (całka podwójna po trójkącie) Całka podwójna po trójkącie Dana jest funkcja dwóch zmiennych f (x, y) ciągła i ograniczona w obszarze trójkątnym D. Wierzchołki trójkąta wyznaczają punkty
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
Rysunek Łuk trójprzegubowy, kołowy, obciążony ciężarem własnym na prawym odcinku łuku..
 rzykład 10.. Łuk obciążony ciężarem przęsła. Rysunek przedstawia łuk trójprzegubowy, którego oś ma kształt części półokręgu. Łuk obciążony jest ciężarem własnym. Zakładamy, że prawe przęsło łuku jest nieporównanie
rzykład 10.. Łuk obciążony ciężarem przęsła. Rysunek przedstawia łuk trójprzegubowy, którego oś ma kształt części półokręgu. Łuk obciążony jest ciężarem własnym. Zakładamy, że prawe przęsło łuku jest nieporównanie
WIADOMOŚCI OGÓLNE O NAPRĘŻENIACH. Stan naprężenia w punkcie ciała
 WIADOMOŚCI OGÓLN O NAPRĘŻNIACH Stan naprężenia w punkcie ciała Załóżmy, że pewne ciało (rys. 1.1), obciążone układem sił zewnętrznych czynnych i biernych, znajduje się w równowadze. Poprowadzimy myślowo
WIADOMOŚCI OGÓLN O NAPRĘŻNIACH Stan naprężenia w punkcie ciała Załóżmy, że pewne ciało (rys. 1.1), obciążone układem sił zewnętrznych czynnych i biernych, znajduje się w równowadze. Poprowadzimy myślowo
wiczenie 15 ZGINANIE UKO Wprowadzenie Zginanie płaskie Zginanie uko nie Cel wiczenia Okre lenia podstawowe
 Ćwiczenie 15 ZGNANE UKOŚNE 15.1. Wprowadzenie Belką nazywamy element nośny konstrukcji, którego: - jeden wymiar (długość belki) jest znacznie większy od wymiarów przekroju poprzecznego - obciążenie prostopadłe
Ćwiczenie 15 ZGNANE UKOŚNE 15.1. Wprowadzenie Belką nazywamy element nośny konstrukcji, którego: - jeden wymiar (długość belki) jest znacznie większy od wymiarów przekroju poprzecznego - obciążenie prostopadłe
22. CAŁKA KRZYWOLINIOWA SKIEROWANA
 CAŁA RZYWOLINIOWA SIEROWANA Niech łuk o równaniach parametrycznych: x x(t), y y(t), a < t < b, będzie łukiem regularnym skierowanym, tzn łukiem w którym przyjęto punkt A(x(a), y(a)) za początek łuku, zaś
CAŁA RZYWOLINIOWA SIEROWANA Niech łuk o równaniach parametrycznych: x x(t), y y(t), a < t < b, będzie łukiem regularnym skierowanym, tzn łukiem w którym przyjęto punkt A(x(a), y(a)) za początek łuku, zaś
Nieskończona jednowymiarowa studnia potencjału
 Nieskończona jednowymiarowa studnia potencjału Zagadnienie dane jest następująco: znaleźć funkcje własne i wartości własne operatora energii dla cząstki umieszczonej w nieskończonej studni potencjału,
Nieskończona jednowymiarowa studnia potencjału Zagadnienie dane jest następująco: znaleźć funkcje własne i wartości własne operatora energii dla cząstki umieszczonej w nieskończonej studni potencjału,
Ważną rolę odgrywają tzw. funkcje harmoniczne. Przyjmujemy następującą definicję. u = 0, (6.1) jest operatorem Laplace a. (x,y)
 jest operatorem Laplace a. (x,y)") Wykład 6 Funkcje harmoniczne Ważną rolę odgrywają tzw. funkcje harmoniczne. Przyjmujemy następującą definicję. e f i n i c j a Funkcję u (x 1, x 2,..., x n ) nazywamy harmoniczną w obszarze R n wtedy i
Wykład 6 Funkcje harmoniczne Ważną rolę odgrywają tzw. funkcje harmoniczne. Przyjmujemy następującą definicję. e f i n i c j a Funkcję u (x 1, x 2,..., x n ) nazywamy harmoniczną w obszarze R n wtedy i
1. ANALIZA BELEK I RAM PŁASKICH
 5/6 1. NIZ BEEK I RM PŁSKICH 1 1. NIZ BEEK I RM PŁSKICH 1.1 naliza kinematyczna podstawowe definicje Podstawowym pojęciem stosowanym w analizie kinematycznej belek i ram płaskich jest tarcza sztywna. Jest
5/6 1. NIZ BEEK I RM PŁSKICH 1 1. NIZ BEEK I RM PŁSKICH 1.1 naliza kinematyczna podstawowe definicje Podstawowym pojęciem stosowanym w analizie kinematycznej belek i ram płaskich jest tarcza sztywna. Jest
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 7 2012/2013, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 7 2012/2013, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
PŁYTY OPIS W UKŁADZIE KARTEZJAŃSKIM Charakterystyczne wielkości i równania
 Charakterystyczne wielkości i równania PODSTAWY KOMPUTEROWEGO MODELOWANIA USTROJÓW POWIERZCHNIOWYCH Budownictwo, studia I stopnia, semestr VI przedmiot fakultatywny Instytut L-5, Wydział Inżynierii Lądowej,
Charakterystyczne wielkości i równania PODSTAWY KOMPUTEROWEGO MODELOWANIA USTROJÓW POWIERZCHNIOWYCH Budownictwo, studia I stopnia, semestr VI przedmiot fakultatywny Instytut L-5, Wydział Inżynierii Lądowej,
SKRĘCANIE WAŁÓW OKRĄGŁYCH
 KRĘCANIE AŁÓ OKRĄGŁYCH kręcanie występuje wówczas gdy para sił tworząca moment leży w płaszczyźnie prostopadłej do osi elementu konstrukcyjnego zwanego wałem Rysunek pokazuje wał obciążony dwiema parami
KRĘCANIE AŁÓ OKRĄGŁYCH kręcanie występuje wówczas gdy para sił tworząca moment leży w płaszczyźnie prostopadłej do osi elementu konstrukcyjnego zwanego wałem Rysunek pokazuje wał obciążony dwiema parami
1. STAN NAPRĘŻENIA 1.1. SIŁY POWIERZCHNIOWE I OBJĘTOŚCIOWE
 Część STAN NAPRĘŻĘNIA STAN NAPRĘŻENIA SIŁY POWIERZCHNIOWE I OBJĘTOŚCIOWE Rozważmy ciało o objętości V 0 ograniczone powierzchnią S 0 poddane działaniu sił będących w równowadze (rys ) Rozróżniamy tutaj
Część STAN NAPRĘŻĘNIA STAN NAPRĘŻENIA SIŁY POWIERZCHNIOWE I OBJĘTOŚCIOWE Rozważmy ciało o objętości V 0 ograniczone powierzchnią S 0 poddane działaniu sił będących w równowadze (rys ) Rozróżniamy tutaj
Karta (sylabus) przedmiotu Mechanika i Budowa Maszyn Studia I stopnia o profilu: A P
 przedmiotu Mechanika i Budowa Maszyn Studia I stopnia o profilu: A P") WM Karta (sylabus) przedmiotu Mechanika i Budowa Maszyn Studia I stopnia o profilu: A P Przedmiot: Wytrzymałość Materiałów I Kod ECTS Status przedmiotu: obowiązkowy MBM 1 S 0 3 37-0_0 Język wykładowy:
WM Karta (sylabus) przedmiotu Mechanika i Budowa Maszyn Studia I stopnia o profilu: A P Przedmiot: Wytrzymałość Materiałów I Kod ECTS Status przedmiotu: obowiązkowy MBM 1 S 0 3 37-0_0 Język wykładowy:
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Mechanika i Budowa Maszyn
 Mechanika i Budowa Maszyn Materiały pomocnicze do ćwiczeń Wyznaczanie sił wewnętrznych w belkach statycznie wyznaczalnych Andrzej J. Zmysłowski Andrzej J. Zmysłowski Wyznaczanie sił wewnętrznych w belkach
Mechanika i Budowa Maszyn Materiały pomocnicze do ćwiczeń Wyznaczanie sił wewnętrznych w belkach statycznie wyznaczalnych Andrzej J. Zmysłowski Andrzej J. Zmysłowski Wyznaczanie sił wewnętrznych w belkach
Politechnika Śląska w Gliwicach Wydział Organizacji i Zarządzania Katedra Podstaw Systemów Technicznych
 Przedmiot: Mechanika stosowana Liczba godzin zajęć dydaktycznych: Politechnika Śląska w Gliwicach Wydział Organizacji i Zarządzania Katedra Podstaw Systemów Technicznych Studia magisterskie: wykład 30
Przedmiot: Mechanika stosowana Liczba godzin zajęć dydaktycznych: Politechnika Śląska w Gliwicach Wydział Organizacji i Zarządzania Katedra Podstaw Systemów Technicznych Studia magisterskie: wykład 30
Rozwiązywanie belek prostych i przegubowych wyznaczanie reakcji i wykresów sił przekrojowych 6
 ozwiązwanie beek prostch i przegubowch wznaczanie reakcji i wkresów sił przekrojowch 6 Obciążenie beki mogą stanowić sił skupione, moment skupione oraz obciążenia ciągłe q rs. 6.. s. 6. rzed przstąpieniem
ozwiązwanie beek prostch i przegubowch wznaczanie reakcji i wkresów sił przekrojowch 6 Obciążenie beki mogą stanowić sił skupione, moment skupione oraz obciążenia ciągłe q rs. 6.. s. 6. rzed przstąpieniem
3. RÓWNOWAGA PŁASKIEGO UKŁADU SIŁ
 3. ÓWNOWG PŁSKIEGO UKŁDU SIŁ Zadanie 3. elka o długości 3a jest utwierdzona w punkcie zaś w punkcie spoczywa na podporze przegubowej ruchomej, rysunek 3... by belka była statycznie wyznaczalna w punkcie
3. ÓWNOWG PŁSKIEGO UKŁDU SIŁ Zadanie 3. elka o długości 3a jest utwierdzona w punkcie zaś w punkcie spoczywa na podporze przegubowej ruchomej, rysunek 3... by belka była statycznie wyznaczalna w punkcie
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
 Część 6. WYZNCZNIE LINII UGIĘCI W UKŁDCH PRĘTWYCH 6. 6. WYZNCZNIE LINII UGIĘCI W UKŁDCH PRĘTWYCH 6.. Wyznaczanie przemieszczeń z zastosowaniem równań pracy wirtualnej w układach prętowych W metodzie pracy
Część 6. WYZNCZNIE LINII UGIĘCI W UKŁDCH PRĘTWYCH 6. 6. WYZNCZNIE LINII UGIĘCI W UKŁDCH PRĘTWYCH 6.. Wyznaczanie przemieszczeń z zastosowaniem równań pracy wirtualnej w układach prętowych W metodzie pracy
Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego (Katera)
") Politechnika Łódzka FTMS Kierunek: nformatyka rok akademicki: 2008/2009 sem. 2. Termin: 6 V 2009 Nr. ćwiczenia: 112 Temat ćwiczenia: Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
Politechnika Łódzka FTMS Kierunek: nformatyka rok akademicki: 2008/2009 sem. 2. Termin: 6 V 2009 Nr. ćwiczenia: 112 Temat ćwiczenia: Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
AUTORKA: ELŻBIETA SZUMIŃSKA NAUCZYCIELKA ZESPOŁU SZKÓŁ OGÓLNOKSZTAŁCĄCYCH SCHOLASTICUS W ŁODZI ZNANE RÓWNANIA PROSTEJ NA PŁASZCZYŹNIE I W PRZESTRZENI
 UTORK: ELŻBIET SZUMIŃSK NUCZYCIELK ZESPOŁU SZKÓŁ OGÓLNOKSZTŁCĄCYCH SCHOLSTICUS W ŁODZI ZNNE RÓWNNI PROSTEJ N PŁSZCZYŹNIE I W PRZESTRZENI SPIS TREŚCI: PROST N PŁSZCZYŻNIE Str 1. Równanie kierunkowe prostej
UTORK: ELŻBIET SZUMIŃSK NUCZYCIELK ZESPOŁU SZKÓŁ OGÓLNOKSZTŁCĄCYCH SCHOLSTICUS W ŁODZI ZNNE RÓWNNI PROSTEJ N PŁSZCZYŹNIE I W PRZESTRZENI SPIS TREŚCI: PROST N PŁSZCZYŻNIE Str 1. Równanie kierunkowe prostej
GEOMETRIA ANALITYCZNA W PRZESTRZENI
 GEOMETRIA ANALITYCZNA W PRZESTRZENI Położenie punktu w przestrzeni określamy za pomocą trzech liczb (x, y, z). Liczby te odpowiadają rzutom na osie układu współrzędnych: każdy rzut wzdłuż płaszczyzny równoległej
GEOMETRIA ANALITYCZNA W PRZESTRZENI Położenie punktu w przestrzeni określamy za pomocą trzech liczb (x, y, z). Liczby te odpowiadają rzutom na osie układu współrzędnych: każdy rzut wzdłuż płaszczyzny równoległej
Rzuty aksonometryczne służą do poglądowego przedstawiania przedmiotów.
 RZUTOWANIE AKSONOMETRYCZNE Rzuty aksonometryczne służą do poglądowego przedstawiania przedmiotów. W metodzie aksonometrycznej rzutnią jest płaszczyzna dowolnie ustawiona względem trzech osi,, układu prostokątnego
RZUTOWANIE AKSONOMETRYCZNE Rzuty aksonometryczne służą do poglądowego przedstawiania przedmiotów. W metodzie aksonometrycznej rzutnią jest płaszczyzna dowolnie ustawiona względem trzech osi,, układu prostokątnego
MECHANIKA II. Praca i energia punktu materialnego
 MECHANIKA II. Praca i energia punktu materialnego Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA II. Praca i energia punktu materialnego Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
11. Znajdż równanie prostej prostopadłej do prostej k i przechodzącej przez punkt A = (2;2).
.") 1. Narysuj poniższe figury: a), b), c) 2. Punkty A = (0;1) oraz B = (-1;0) należą do okręgu którego środek należy do prostej o równaniu x-2 = 0. Podaj równanie okręgu. 3. Znaleźć równanie okręgu przechodzącego
1. Narysuj poniższe figury: a), b), c) 2. Punkty A = (0;1) oraz B = (-1;0) należą do okręgu którego środek należy do prostej o równaniu x-2 = 0. Podaj równanie okręgu. 3. Znaleźć równanie okręgu przechodzącego
Funkcje dwóch zmiennych
 Funkcje dwóch zmiennych Andrzej Musielak Str Funkcje dwóch zmiennych Wstęp Funkcja rzeczywista dwóch zmiennych to funkcja, której argumentem jest para liczb rzeczywistych, a wartością liczba rzeczywista.
Funkcje dwóch zmiennych Andrzej Musielak Str Funkcje dwóch zmiennych Wstęp Funkcja rzeczywista dwóch zmiennych to funkcja, której argumentem jest para liczb rzeczywistych, a wartością liczba rzeczywista.
2. CHARAKTERYSTYKI GEOMETRYCZNE FIGUR PŁASKICH
 dam Bodnar: Wtrzmałość Materiałów. Charakterstki geometrczne figur płaskich.. CHRKTERSTKI GEOMETRCZNE FIGUR PŁSKICH.. Definicje podstawowch charakterstk geometrcznch Podczas zajęć z wtrzmałości materiałów
dam Bodnar: Wtrzmałość Materiałów. Charakterstki geometrczne figur płaskich.. CHRKTERSTKI GEOMETRCZNE FIGUR PŁSKICH.. Definicje podstawowch charakterstk geometrcznch Podczas zajęć z wtrzmałości materiałów