WIADOMOŚCI OGÓLNE O NAPRĘŻENIACH. Stan naprężenia w punkcie ciała
|
|
|
- Feliks Marczak
- 10 lat temu
- Przeglądów:
Transkrypt

1 WIADOMOŚCI OGÓLN O NAPRĘŻNIACH Stan naprężenia w punkcie ciała Załóżmy, że pewne ciało (rys. 1.1), obciążone układem sił zewnętrznych czynnych i biernych, znajduje się w równowadze. Poprowadzimy myślowo pewną zamkniętą powierzchnię A wewnątrz obszaru ciała. Interesuje nas, jakie jest oddziaływanie materiału części zewnętrznej na materiał ograniczony powierzchnią A. Rys. 1.1 Rozważmy element powierzchniowy ΔA na uprzednio wydzielonej powierzchni A oraz poprowadźmy wektor jednostkowy ν normalny do ΔA i skierowany na zewnątrz powierzchni A. W ten sposób uzyskaliśmy orientację ΔA w rozpatrywanym obszarze ciała, a ponadto jesteśmy w stanie rozróżnić dwie strony ΔA w stosunku do wektora ν. Materiał leżący po stronie dodatniej A, odpowiadającej dodatniemu kierunkowi wektora ν, wywiera siłę ΔF na część przyległą ΔA, ale leżącą po stronie ujemnej normalnej ν. Równocześnie siła ΔF, wynikająca z obciążenia zewnętrznego oraz odciętego przez A ciężaru ciała, staje się funkcją pola elementu powierzchniowego ΔA, a poprzez ν jest jednoznacznie zorientowana na wydzielonej powierzchni A.


2 Gdy ΔA zmierza do zera, to granica ilorazu ΔF df ΔA zmierza do granicy skończonej da przy czym moment sił działających na element ΔA, względem dowolnego punktu tego elementu powierzchniowego zanika. Wektor graniczny o kierunku ΔF p ν = df da nazywamy wektorem naprężenia lub krótko naprężeniem. (1.1) Wynika stąd zasada naprężenia ulera i Cauchy ego, która mówi, że na dowolnej, myślowo poprowadzonej, zamkniętej powierzchni A wewnątrz danego materiału istnieje pole wektorowe naprężeń, którego działanie na materiał wewnątrz A jest równoważne z oddziaływaniem przyległego materiału zewnętrznego. Rys. 1.2 Przyjmijmy, że normalna zewnętrzna ν elementu ΔA jest skierowana tak jak na rys. 1.2, ale się z nią nie pokrywa. Wobec tego wektor p ν = p x może być rozłożony (wzór 1.1.) na trzy składowe o kierunkach przyjętego układu osi współrzędnych: p xx, p xy, p xz, przy czym: p x = p xx i + p xy j + p xz k Podobnie dla innych powierzchni elementu ΔA zorientowanych względem przyjętego układu współrzędnych będzie:

 Składowe o indeksach równoimiennych są skierowane wzdłuż normalnych do rozpatrywanych powierzchni, a odpowiadające im naprężenia nazywamy naprężeniami normalnymi i oznaczamy przez ζ, pozostałe zaś")
3 p y = p yx i + p yy j + p yz k p z = p zx i + p zy j + p zz k (1.2) Składowe o indeksach równoimiennych są skierowane wzdłuż normalnych do rozpatrywanych powierzchni, a odpowiadające im naprężenia nazywamy naprężeniami normalnymi i oznaczamy przez ζ, pozostałe zaś składowe nazywamy naprężeniami stycznymi i oznaczamy przez η. Jednostką naprężenia jest Pascal (Pa). Pa = N m 2. Wobec powyższego składowe naprężeń, działających na pola elementarne, równoległe do płaszczyzn przyjętego układu osi współrzędnych, można zapisać w postaci wyznacznika o składnikach: składowa stanu naprężenia: - powierzchnia normalna do x ζ x η xy η xz - powierzchnia normalna do y η yx ζ y η yz (1.3) - powierzchnia normalna do z η zx η zy ζ z co zostało przedstawione na rys. (1.3) Rys. 1.3


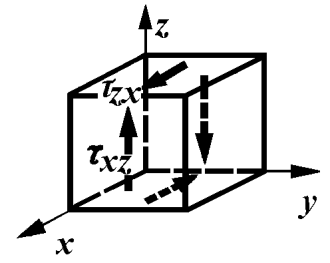
4 Układ (rys. 1.3) zawiera składowe ogólnego stanu naprężenia w dowolnym punkcie rozpatrywanego ciała. Z podanych założeń i opisu stanu naprężenia wynika znakowanie naprężeń, przy czym jednoznacznie określony jest tylko znak naprężenia ζ; gdy działa ono wzdłuż osi na zewnątrz przekroju, to uważamy go za dodatni, co w rzeczywistości odpowiada skutkom przez niego wywołanym. Natomiast znak naprężenia stycznego η jest umowny, przy czym najwygodniej jest, aby podstawę znakowania tworzył przyjęty układ współrzędnych. Rys. 1.4 Rozważmy obecnie stan równowagi prostopadłościanu o ściankach równoległych do płaszczyzn współrzędnych. Naprężenia działające na poszczególnych ściankach zaznaczone są na rys. 1.4, z którego wynika, że sile (ζ x + δζ x δx dx)dxdy działającej na ściance pionowej przedniej odpowiada siła ζ x dydz, działająca na ściance pionowej tylnej itd. Jako ciężar elementu przyjmujemy siłę masową myślowo wyciętego elementu, przy gęstości ρ, równą ρxdxdydz. Warunek równowagi wymaga, aby suma sił i momentów sił były równe zeru. Dla sumy rzutów na oś x otrzymamy:


5 ζ x + δζ x δx dx dydz - ζ xdydz + η yx + δη yx δy dy dzdx η yxdzdx + + η zx + δη zx δz dz dxdy η zxdxdy + ρxdxdydz = 0 Pisząc pozostałe równania rzutów na osie y i z oraz porządkując i dzieląc obie strony równania przez d x d y d z otrzymamy: δζ x δx + δη yx δy + δη zx δz + ρx = 0 δη xy δx + δζ y δy + δη zy δz δη xz δx + δη yz δy + δζ z δz + ρz = 0 + ρy = 0 (1.4) Następnie piszemy pozostałe trzy równania momentów względem poszczególnych osi. Rys. 1.5 Równanie momentów względem osi x lub dla wygody względem osi x (co nie zmienia istoty zagadnienia - rys. 1.5), na którym zaznaczono tylko te naprężenia, które względem osi x dają momenty różne od zera, znajdujemy: η yz + δη yz δy dy dzdx 1 2 dy + η yzdzdx 1 2 dy η zy + δη zy δz dz dxdy 1 2 dz + η zy dxdy 1 2 dz = 0


6 Wykonując odpowiednie działania i skracając obie strony przez dxdydz otrzymujemy: 2η yz + δη yz δy dy 2η zy - δη zy δz dz = 0, a następnie skreślając wyrażenia małe wyższego rzędu, otrzymamy: η yz = η zy Analogicznie, pisząc równania momentów względem pozostałych dwóch osi: y oraz z i wykonując odpowiednie działania otrzymamy: η xy = η yx η xz = η zx (1.5) Te trzy równania wyrażają prawo równości odpowiadających sobie naprężeń stycznych tzw. aksjomat Boltzmana, który możemy sformułować nastepująco: składowe naprężeń stycznych, prostopadłe do krawędzi przecięcia się dwóch elementarnych przekrojów wzajemnie prostopadłych są sobie równe. Ta zależność zmniejsza ilość składowych stanu naprężenia w dowolnym punkcie z dziewięciu do sześciu. x xy xz p (1.6) y yz z 1.2. Naprężenia główne Stan naprężenia w otoczeniu punktu, który nazywamy stanem naprężenia w punkcie, jest to stan fizyczny określony właściwościami materiału i oddziaływaniami zewnętrznymi. Został on scharakteryzowany sześcioma składowymi stanu naprężenia. Istnieje taki układ współrzędnych, związany z rozpatrywanym punktem ciała, dla którego składowe stanu naprężenia przyjmują postać: ζ 1, ζ 2, ζ 3, 0, 0, 0 a więc: η xy = 0 η yz = 0 (1.7) η xz = 0 Trzy osie, dla których otrzymamy takie wartości, nazywamy osiami głównymi stanu naprężenia i oznaczamy je przez 1, 2, 3 natomiast naprężenia: ζ 1, ζ 2, ζ 3 nazywamy naprężeniami głównymi.

7 Naprężenia główne ζ 1, ζ 2, ζ 3 możemy łatwo wyliczyć korzystając z tzw. równania wiekowego (sekularnego): ζ 3 ζ 2 S I + ζs II S III = 0 (1.8) gdzie: S I, S II, S III niezmienniki stanu naprężenia, które wynoszą odpowiednio: S I = ζ x + ζ y + ζ z S II = ζ x ζ y + ζ y ζ z + ζ z ζ x η 2 x η 2 y η 2 z (1.9) S III = ζ x ζ y ζ z + 2η x η y η z ζ x η 2 x ζ y η 2 y ζ z η 2 z Równanie (1.8) zawsze posiada trzy pierwiastki rzeczywiste, przedstawiające poszukiwane naprężenia główne ζ 1, ζ 2, ζ 3, przy czym pomiędzy tymi wartościami musi zachodzić zależność: ζ 1 > ζ 2 > ζ 3 Naprężenia te leżą wzdłuż trzech osi głównych 1, 2, 3 stanu naprężenia wzajemnie do siebie prostopadłych. Jeśli rozpatrywany punkt ciała otoczymy elementarnym równoległościanem o bokach równoległych do płaszczyzn głównych w tym punkcie, to na bokach tego równoległościanu będą działać tylko naprężenia normalne równe naprężeniom głównym. Jest to fizycznie istotna i bardzo ważna właściwość stanu naprężenia, pozwalająca na określenie naprężenia na dowolnej płaszczyźnie, zorientowanej wektorem ν, zależnością: ζ ν = ζ 1 l 2 + ζ 2 m 2 + ζ 3 n 2 (1.10) 1.3. Płaski stan naprężenia Gdy jedno z naprężeń głównych jest równe zeru, to taki stan naprężenia nazywamy płaskim (spotykamy również określenie dwukierunkowy stan naprężenia). Przyjmujemy, że naprężenie główne ζ 3 = 0, czyli kierunkowi jego występowania odpowiada oś z. W tym przypadku mamy (rys. 1.6): ζ 3 = ζ z = 0 oraz: η xz = η zx = 0, a także η zy = η yz = 0. Dla takiego przypadku niezmiennik S III stanu naprężenia jest równy zeru, co jest wystarczającym warunkiem do stwierdzenia płaskości stanu naprężenia.
 zawsze posiada trzy pierwiastki rzeczywiste, przedstawiające poszukiwane naprężenia główne ζ 1, ζ 2, ζ 3, przy czym pomiędzy tymi wartościami musi zachodzić zależność: ζ 1 > ζ 2 > ζ 3 Naprężenia")
 Pierwiastkami tego równania, odpowiadającym wartościom ekstremalnym naprężeń, są naprężenia główne płaskiego stanu naprężeń (dwukierunkowego): Podstawiając ζ 1,2 = S 1 2 ± S 2 I 4 - S II oraz S I")
8 Rys. 1.6 Równanie (1.8) przyjmie postać: ζ 2 ζs I + S II = 0 (1.11) Pierwiastkami tego równania, odpowiadającym wartościom ekstremalnym naprężeń, są naprężenia główne płaskiego stanu naprężeń (dwukierunkowego): Podstawiając ζ 1,2 = S 1 2 ± S 2 I 4 - S II oraz S I = ζ x + ζ y znajdujemy S II = ζ x ζ y η 2 x ζ 1,2 = 1 2 ζ x + ζ y ± 1 2 (ζ x - ζ y ) 2 + 4η 2 xy (1.12) przy czym: Natomiast kąt nachylenia płaszczyzny głównej znajdujemy z następującego wzoru: tg2α n = α n = α 1 + nπ 2, 2η ζ x - ζ y (1.13)
 2 + 4η 2 xy (1.")
, jeżeli: l = cosα, m = cosβ = sinα, n = cosγ = 0 to wartości naprężeń (zgodnie z 1.")
9 gdzie: n = 0, 1, 2,... Interesują nas jedynie wartości α 1 przy n = 0 oraz α 2 = α 1 + π 2 przy n = 1. Oznacza to, że wartości ekstremalne ζ 1 = ζ α1 i ζ 2 = ζ α2 są do siebie wzajemnie prostopadłe. Załóżmy, że znane są wartości naprężeń ζ 1 i ζ 2 a także położenie odpowiadających im osi: 1 oraz 2. Dla wybranej przez nas płaszczyzny, określonej wektorem ν (rys. 1.7), jeżeli: l = cosα, m = cosβ = sinα, n = cosγ = 0 to wartości naprężeń (zgodnie z 1.10) wynoszą: ζ ν = ζ α = ζ 1 cos 2 α + ζ 2 sin 2 α = 1 2 ζ 1 + ζ ζ 1 - ζ 2 cos2α, η ν = η α = (-ζ 1 + ζ 2 ) sinα cosα = ζ 1 - ζ 2 sin2α, (1.14) gdyż: η ν = p ν s = (iζ 1 l + jζ 2 m) (-im + jl). Rys. 1.7 Z warunku istnienia ekstremum: otrzymamy: δη ν δα = dη ν dα = 0, ζ 1 - ζ 2 = 0,
 wynoszą: ζ ν = ζ α = ζ 1 cos 2 α + ζ 2 sin 2 α = 1 2 ζ 1 + ζ 2-1 2 ζ 1 - ζ 2 cos2α, η ν = η α = (-ζ 1 + ζ 2 ) sinα cosα = - 1 2 ζ 1 - ζ 2 sin2α, (1.")
10 lub: oraz: sin 2α = 0, ζ 1 ζ 2. W pierwszym przypadku naprężenia styczne są równe zeru na dowolnej płaszczyźnie równoległej do osi z, tzn., że wszystkie takie płaszczyzny są płaszczyznami głównymi. W drugim przypadku α = ± π 4, co oznacza, że wartości maksymalne η 1,2 = ± ζ 1 - ζ 2 2 występują na płaszczyznach odchylonych o kąt ± 45 o od płaszczyzn głównych. Naprężenia maksymalne η 1,2 = ± ζ 1 - ζ 2 2 otrzymujemy podstawiając obliczone wg (1.12) ζ 1 i ζ 2 : η 1,2 = ± 1 2 (ζ x - ζ y ) 2 + 4η 2 xy (1.15) W naszych rozważaniach będziemy się zajmowali tylko płaskim stanem naprężenia (dwukierunkowym). OGÓLN WIADOMOŚCI O ODKSZTAŁCNIACH Opis geometryczny odkształceń W założeniach wytrzymałościowych mechaniki ciała odkształcalnego przyjmuje się, że zachodzące w nim, wskutek pewnych oddziaływań fizycznych, zmiany mają charakter ciągły. Oznacza to, że dwa sąsiadujące ze sobą przed odkształceniem punkty ciała pozostają punktami sąsiednimi także po odkształceniu. Wydzielmy z pewnego ciała odkształcalnego element prostopadłościenny o krawędziach dx, dy, dz. Po odkształceniu przekrój ten ulegnie odpowiednim przemieszczeniom, zależnym zarówno od zaistniałych oddziaływań fizycznych, jak i własności materiałowych ciała. lement prostopadłościenny zmienia się zatem na równoległościenny, a odkształcenie polega na zmianie kątów ściennych elementu (rys. 2.1).
 W naszych rozważaniach będziemy się zajmowali tylko płaskim stanem naprężenia (dwukierunkowym).")

11 Rys. 2.1 Długości krawędzi: dx, dy, dz doznają przyrostów algebraicznych ε x dx, ε y dy, ε z dz, zaś proste przed odkształceniem kąty dwuścienne przyjmują po odkształceniu wartości: π/2-γ xy, π/2-γ yz, π/2-γ zx. Zatem odkształcenie elementu dx, dy, dz może być określone przez sześć wielkości jednostkowych; - trzy wielkości wydłużenia względnego ε x, ε y, ε z, - oraz trzy wielkości odkształcenia postaci, wyrażone zmianami kątów γ xy, γ yz, γ zx. Przez wydłużenie względne rozumiemy stosunek przyrostu Δl pewnej długości do jej wymiaru pierwotnego l.


12 Rys. 2.2 Wyobraźmy sobie (rys. 2.2), że rozpatrywany element prostopadłościenny składa się z dużej liczby cienkich warstewek. Przyjmijmy, że odkształcenie nastąpiło na skutek poślizgu poszczególnych warstw po sobie, ale w ten sposób, że krawędź B pozostała nieruchoma, zaś krawędź BC przeszła w BC, a krawędź D w D. Przy dostatecznie małych wymiarach elementu odkształcenie takie nie wpływa na wielkość pola jego powierzchni, a powoduje jedynie zmianę kształtu, wyrażoną przez nachylenie boku BC i powstanie kąta γ. Miarą tego odkształcenia jest, odniesione do jednostki długości boku BC, przemieszczenie CC które wynosi (rys. 2.2) CC = δ = BCtgγ = BCγ Rodzaje odkształceń W ogólnym stanie odkształcenia, gdy wszystkie składowe odkształceń są różne od zera, objętość V równoległościanu, powstałego z prostopadłościanu V = dxdydz, można obliczyć mnożąc (rys. 2.1): - podstawę prostopadłościanu (1 + ε x )dx(1 + ε y )dy sin - przez jego wysokość, która wynosi: π 2 - γ xy = (1 + ε x )(1 + ε y )dxdy cosγ xy 1 + ε z dz sin π 2 - γ yz sin π 2 - γ zx = 1 + ε z dz cosγ yz cosγ zx Otrzymujemy wtedy V = (1 + ε x )(1 + ε y )(1 + ε z ) cosγ xy cosγ yz cosγ zx (2.1)

 Po wymnożeniu dwumianów w nawiasach i po odrzuceniu iloczynów ε jako wielkości małego rzędu znajdujemy: ΔV V = (1 + ε x+ ε y + ε z ) cosγ xy cosγ yz cosγ zx 1 (2.3) Podany we wzorze (2.")
13 Objętość ta, będzie różna od objętości pierwotnej. Stąd przyrost jednostkowy objętości wyrazi się zależnością: ΔV V = V' - V V = ( 1 + ε x )( 1 + ε y )( 1+ ε z ) cos γ xy cos γ yz cos, γ zx 1 (2.2) Po wymnożeniu dwumianów w nawiasach i po odrzuceniu iloczynów ε jako wielkości małego rzędu znajdujemy: ΔV V = (1 + ε x+ ε y + ε z ) cosγ xy cosγ yz cosγ zx 1 (2.3) Podany we wzorze (2.3) przyrost objętości uwzględnia wszystkie składowe stanu odkształcenia, zwanego mieszanym. Mogą zaistnieć przypadki, gdy odkształceniu będzie towarzyszyła wyłącznie zmiana objętości bez zmiany kształtu lub odwrotnie, gdy zmieni się kształt bez zmiany objętości. Pierwszy rodzaj odkształcenia nazywamy odkształceniem objętościowym, natomiast drugi odkształceniem postaci. warunki: Aby zaistniało odkształcenie czysto objętościowe, muszą być spełnione następujące γ xy = γ yz = γ zx = 0 i równocześnie ε x = ε y = ε z = ε 0, (2.4) gdyż tylko w takim przypadku wszystkie kąty γ ij będą równe zeru. Rys. 2.3 Gdyby składowe odkształceń jednostkowych różniły się między sobą, np. ε x ε y, to zgodnie z rysunkiem 2.3 musiałby powstać kąt γ, gdyż: tg(α + γ) = (1 + ε y)dy (1 + ε x ) dx = 1 + ε y 1 + ε x tgα. Natomiast przy ε x = ε y = ε otrzymamy:

14 tg(α + γ) = 1 + ε 1 + ε tgα, co jest możliwe tylko przy γ = 0 (co należało udowodnić). Dlatego też, przy ε x = ε y = ε z = ε prostopadłościan dx, dy, dz zmieni się na podobny o krawędziach zmienionych w stosunku do pierwotnego w proporcji (1 + ε) 1 i wówczas otrzymamy: ΔV V = 3ε., (2.5) Przy odkształceniu czysto postaciowym objętość musi pozostać niezmieniona, czyli: ΔV = 0, co wyraża zależność: ΔV V = (1 + ε x+ ε y + ε z ) cosγ xy cosγ yz cosγ zx 1 = 0 (2.6) W przybliżeniu, biorąc pod uwagę, że kąty γ ij są bardzo małe i wobec tego cosγ ij 1, warunek (2.6) przyjmie postać: ε x + ε y + ε z = 0 (2.7) Jednoczesne niespełnienie warunku (2.4) i (2.7) świadczy o tym, że mamy do czynienia z odkształceniem mieszanym: objętościowo postaciowym. warunek: oraz Do zaistnienia odkształcenia czysto objętościowego musi być spełniony następujący γ ij = 0 ε x = ε y = ε z = ε 0. Natomiast dla odkształcenia postaciowego ale γ ij 0, ε x + ε y + ε z = 0.
 W przybliżeniu, biorąc pod uwagę, że kąty γ ij są bardzo małe i wobec tego cosγ ij 1, warunek (2.6) przyjmie postać: ε x + ε y + ε z = 0 (2.7) Jednoczesne niespełnienie warunku (2.4) i (2.")
15 PRAWO HOOK A Zależność między stałymi sprężystości W ogólnym stanie naprężenia ciała otrzymaliśmy sześć składowych stanu naprężenia: ζ x, ζ y, ζ z, η xy, η yz, η zx, oraz sześć składowych stanu odkształcenia: ε x, ε y, ε z, γ xy, γ yz, γ zx. Związki łączące stan naprężenia ze stanem odkształcenia szczegółowo badał angielski fizyk Robert Hooke ( ) i zależności które podał, nazywamy prawem Hooke a. Hooke przyjął liniową zależność pomiędzy składowymi stanu naprężenia a odkształcenia. Składowe stanu naprężenia są jednorodnymi liniowymi funkcjami składowych stanu odkształcenia. Właściwość tę wyrażamy w postaci prawa Hooke a; ε = 1 ζ, (3.1) które mówi nam: odkształcenie jest proporcjonalne do naprężeń, które je spowodowały, przy czym, zwane modułem sprężystości podłużnej lub modułem Younga, określa proporcjonalność pomiędzy ε a ζ. Wielkość charakteryzuje odkształcalność materiału. Jest to tzw. stała materiałowa, którą wyznaczamy doświadczalnie (jest stała dla danego rodzaju materiału). Prawo Hooke a, jak wynika ze wzoru (3.1) definiuje nam związki fizyczne między odkształceniami a naprężeniami jako liniowe. Zmiany przekroju poprzecznego są proporcjonalne do naprężenia ζ, zaś stosunek ε' ε jest liczbą stałą zależną od właściwości materiału. gdzie: ε = - μ ε ε odkształcenie poprzeczne, ε odkształcenie wzdłużne. Uwzględniając (3.1) otrzymamy: z uwagi na to, że ε 2 = ε 3 = - μ 1 ζ 1 (3.2) ζ 2 = ζ 3 = 0. Stała μ, zwana współczynnikiem Poissona, jest obok drugą stałą charakteryzującą materiał, która przyjmuje wartości 0 < μ < 1 2 dla wszystkich materiałów.

 Wielkość ta jest ściśle związana z podanymi wyżej dwoma stałymi materiałowymi i G = 2(1 + μ).")
16 Istnieje jeszcze trzecia stała materiałowa, którą oznaczamy przez G i określamy jako moduł sprężystości poprzecznej lub moduł Kirchoffa. wynosi: Cecha ta odnosi się do kąta odkształcenia postaciowego γ, zwana prawem Kirchoffa. γ = 1 G η (3.3) Wielkość ta jest ściśle związana z podanymi wyżej dwoma stałymi materiałowymi i G = 2(1 + μ). (3.4) Mamy więc formalnie trzy stałe materiałowe. Jednak ze względu na wzór (3.4), faktycznie w materiale izotropowym występują tylko dwie stałe materiałowe (sprężystości). W obliczeniach wytrzymałościowych bardzo często stosuje się zasadę superpozycji. Oznacza ona, że jeśli szereg przyczyn P i wywołuje odpowiednie skutki S i, związane z przyczynami jednakową zależnością funkcyjną: to suma tych przyczyn: S i = f(p i ) (3.5) P = n i 1 Pi, wywoła skutek równy sumie poszczególnych skutków: S = n i 1 Si, przy czym dla sumy będzie spełniona ta sama zależność funkcyjna, jak dla poszczególnych wielkości (3.5). Aby można było stosować zasadę superpozycji, zależność pomiędzy przyczyną a skutkami musi być funkcją liniową, czyli: gdzie: S i = kp i, k - współczynnik proporcjonalności, dlatego przy dodawaniu przyczyn współczynnik ten czyli: można wyłączyć przed nawias, S 1 + S S n = k(p 1 + P P n ), S = kp. (3.6)

17 W przypadku zagadnień wytrzymałościowych o zastosowaniu zasady superpozycji można mówić m. in. przy związkach między naprężeniami ζ jako przyczynami, a odkształceniami ε, jako skutkami. Można przyjąć, że zasada ta może być stosowana do materiałów podlegających prawu Hooke a. Jeśli w materiale podlegającym prawu Hooke a wywołamy naprężenia: ζ 1, ζ 2,...ζ n i gdy zarówno każda wartość ζ i jak i ich suma jest mniejsza od wartości na granicy proporcjonalności R H = ζ H, to znając poszczególne wydłużenia: ε 1 = 1 ζ 1, ε 2 = 1 ζ 2, ε n = 1 ζ n, możemy powiedzieć, że odkształcenie całkowite jest równe sumie odkształceń ε i : ε = ε i = 1 ζ i = ζ (3.7) Gdyby natomiast którekolwiek z poszczególnych naprężeń ζ i lub naprężenie sumaryczne ζ było większe od wartości R H, powyższe równanie nie będzie spełnione. Jeśli znany jest ogólny stan naprężenia, określony przez układ naprężeń: ζ x,..., η xy,..., oraz jeśli są znane odpowiadające im odkształcenia, to możemy stosując zasadę superpozycji wyznaczyć związki pomiędzy odkształceniami a naprężeniami w złożonym stanie naprężeń (rys. 3.1). Zakładając, że żadne z naprężeń ani ich sumy nie wywołują przekroczenia granicy proporcjonalności, przyjmując ponadto wg (3.1), że: oraz wg (3.2): ε' i = ζ i, a także wg (3.3), ε i = - μ 1 ζ i, γ i = 1 G η i, możemy znaleźć poszczególne składowe odkształceń, jak to podano w tabeli (rys. 3.1). W związku z tym, sumując zgodnie z zasadą superpozycji poszczególne wiersze tabeli (rys. 3.1) dla materiału izotropowego prawo Hooke a przyjmie postać:






18 Naprężenia Odkształcenia ε x ε y ε z γ xy γ yz γ zx ζ x -μ ζ x -μ ζ x μ ζ y ζ y -μ ζ y μ ζ z -μ ζ z ζ z η xy G η yz G η zx G Rys. 3.1

19 ε x = 1 ζ x μ(ζ y + ζ z ) ε y = 1 ζ y μ(ζ z + ζ x ) ε z = 1 ζ z μ(ζ x + ζ y ) (3.8) γ x = η xy G γ y = η yz G γ z = η zx G Wzory te wyrażają dla trójosiowego (trójkierunkowego) stanu naprężenia tzw. uogólnione prawa Hooke a: składowe stanu odkształcenia są liniowymi jednorodnymi funkcjami składowych stanu naprężenia.

POMIAR WSPÓŁCZYNNIKA ROZSZERZALNOŚCI LINIOWEJ CIAŁ STAŁYCH. Kraków, 2004 21.03.2013
 Anna Linscheid Katedra Chemii i Fizyki, Uniwersytet Rolniczy Do użytku wewnętrznego ĆWICZENIE 11 POMIAR WSPÓŁCZYNNIKA ROZSZERZALNOŚCI LINIOWEJ CIAŁ STAŁYCH Kraków, 24 21.3.213 SPIS TREŚCI I. CZĘŚĆ TEORETYCZNA...
Anna Linscheid Katedra Chemii i Fizyki, Uniwersytet Rolniczy Do użytku wewnętrznego ĆWICZENIE 11 POMIAR WSPÓŁCZYNNIKA ROZSZERZALNOŚCI LINIOWEJ CIAŁ STAŁYCH Kraków, 24 21.3.213 SPIS TREŚCI I. CZĘŚĆ TEORETYCZNA...
3. PŁASKI STAN NAPRĘŻENIA I ODKSZTAŁCENIA
 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA 1 3. 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA Analizując płaski stan naprężenia posługujemy się składowymi tensora naprężenia w postaci wektora {,,y } (3.1) Za dodatnie
3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA 1 3. 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA Analizując płaski stan naprężenia posługujemy się składowymi tensora naprężenia w postaci wektora {,,y } (3.1) Za dodatnie
Wykorzystywanie teorii błędów do opracowywania pomiarów geodezyjnych 311[10].Z1.07
![Wykorzystywanie teorii błędów do opracowywania pomiarów geodezyjnych 311[10].Z1.07](/thumbs/13/15530.jpg "Wykorzystywanie teorii błędów do opracowywania pomiarów geodezyjnych 311[10].Z1.07") MINISTERSTWO EDUKACJI NARODOWEJ Leszek Wiatr Wykorzystywanie teorii błędów do opracowywania pomiarów geodezyjnych 3[].Z.7 Poradnik dla ucznia Wydawca Instytut Technologii Eksploatacji Państwowy Instytut
MINISTERSTWO EDUKACJI NARODOWEJ Leszek Wiatr Wykorzystywanie teorii błędów do opracowywania pomiarów geodezyjnych 3[].Z.7 Poradnik dla ucznia Wydawca Instytut Technologii Eksploatacji Państwowy Instytut
( m) Przykładowe zadania z matematyki na poziomie rozszerzonym wraz z rozwiązaniami. Zadanie 1. (0-1)
 Przykładowe zadania z matematyki na poziomie rozszerzonym wraz z rozwiązaniami. Zadanie 1. (0-1)") Przykładowe zadania z matematyki na poziomie rozszerzonym wraz z rozwiązaniami Zadanie. (0-) Funkcja określona wzorem f ( x) = x dla wszystkich liczb rzeczywistych A. nie ma miejsc zerowych. B. ma dokładnie
Przykładowe zadania z matematyki na poziomie rozszerzonym wraz z rozwiązaniami Zadanie. (0-) Funkcja określona wzorem f ( x) = x dla wszystkich liczb rzeczywistych A. nie ma miejsc zerowych. B. ma dokładnie
KONSTRUKCJE STALOWE W EUROPIE
 KONSTRUKCJE STALOWE W EUROPIE Wielokondygnacyjne konstrukcje stalowe Część 10: Wskazówki dla twórców oprogramowania do projektowania Wielokondygnacyjne konstrukcje stalowe Część 10: Wskazówki dla twórców
KONSTRUKCJE STALOWE W EUROPIE Wielokondygnacyjne konstrukcje stalowe Część 10: Wskazówki dla twórców oprogramowania do projektowania Wielokondygnacyjne konstrukcje stalowe Część 10: Wskazówki dla twórców
Moc (praca w jednostce czasu) pobierana przez urządzenie elektryczne wynosi:
 pobierana przez urządzenie elektryczne wynosi:") Ćwiczenie POMIARY MOCY. Wprowadzenie Moc (praca w jednostce czasu) pobierana przez urządzenie elektryczne wynosi: P = U I (.) Jest to po prostu (praca/ładunek)*(ładunek/czas). Dla napięcia mierzonego w
Ćwiczenie POMIARY MOCY. Wprowadzenie Moc (praca w jednostce czasu) pobierana przez urządzenie elektryczne wynosi: P = U I (.) Jest to po prostu (praca/ładunek)*(ładunek/czas). Dla napięcia mierzonego w
MATEMATYKA Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych (zakres podstawowy)
") MATEMATYKA Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych (zakres podstawowy) Omawiając dane zagadnienie programowe lub rozwiązując zadanie, nauczyciel określa, do jakiego zakresu
MATEMATYKA Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych (zakres podstawowy) Omawiając dane zagadnienie programowe lub rozwiązując zadanie, nauczyciel określa, do jakiego zakresu
Nowa podstawa programowa z matematyki ( w liceum od 01.09.2012 r.)
") IV etap edukacyjny Nowa podstawa programowa z matematyki ( w liceum od 01.09.01 r.) Cele kształcenia wymagania ogólne ZAKRES PODSTAWOWY ZAKRES ROZSZERZONY I. Wykorzystanie i tworzenie informacji. Uczeń
IV etap edukacyjny Nowa podstawa programowa z matematyki ( w liceum od 01.09.01 r.) Cele kształcenia wymagania ogólne ZAKRES PODSTAWOWY ZAKRES ROZSZERZONY I. Wykorzystanie i tworzenie informacji. Uczeń
NOWA PODSTAWA PROGRAMOWA Z MATEMATYKI liceum zakres podstawowy
 1 NOWA PODSTAWA PROGRAMOWA Z MATEMATYKI liceum zakres podstawowy 1. Cele kształcenia wymagania ogólne. NOWA ZAKRES PODSTAWOWY w postawie programowej obowiązującej począwszy od 01.09.2012 r. w klasach pierwszych
1 NOWA PODSTAWA PROGRAMOWA Z MATEMATYKI liceum zakres podstawowy 1. Cele kształcenia wymagania ogólne. NOWA ZAKRES PODSTAWOWY w postawie programowej obowiązującej począwszy od 01.09.2012 r. w klasach pierwszych
FFT, FILTRACJA, MOC SYGNAŁU
 SYSTEMY TELEINFORMATYCZNE INSTRUKCJA DO ĆWICZENIA NR LAB TEMAT: FFT, FILTRACJA, MOC SYGNAŁU SYSTEMY TELEINFORMATYCZNE I. CEL ĆWICZENIA: Celem ćwiczenia jest wprowadzenie studentów w zagadnienie szybkiej
SYSTEMY TELEINFORMATYCZNE INSTRUKCJA DO ĆWICZENIA NR LAB TEMAT: FFT, FILTRACJA, MOC SYGNAŁU SYSTEMY TELEINFORMATYCZNE I. CEL ĆWICZENIA: Celem ćwiczenia jest wprowadzenie studentów w zagadnienie szybkiej
Arkusz maturalny nr 2 poziom podstawowy ZADANIA ZAMKNIĘTE. Rozwiązania. Wartość bezwzględna jest odległością na osi liczbowej.
 Arkusz maturalny nr 2 poziom podstawowy ZADANIA ZAMKNIĘTE Rozwiązania Zadanie 1 Wartość bezwzględna jest odległością na osi liczbowej. Stop Istnieje wzajemnie jednoznaczne przyporządkowanie między punktami
Arkusz maturalny nr 2 poziom podstawowy ZADANIA ZAMKNIĘTE Rozwiązania Zadanie 1 Wartość bezwzględna jest odległością na osi liczbowej. Stop Istnieje wzajemnie jednoznaczne przyporządkowanie między punktami
Brunon R. Górecki. Podstawowy kurs nowoczesnej ekonometrii
 Brunon R. Górecki Podstawowy kurs nowoczesnej ekonometrii SPIS TREŚCI Wstęp CZĘŚĆ I. KLASYCZNY MODEL REGRESJI LINIOWEJ.Wprowadzenie.. Czym jest ekonometria?.. Pojęcie modelu ekonometrycznego.3. Dane statystyczne.4.
Brunon R. Górecki Podstawowy kurs nowoczesnej ekonometrii SPIS TREŚCI Wstęp CZĘŚĆ I. KLASYCZNY MODEL REGRESJI LINIOWEJ.Wprowadzenie.. Czym jest ekonometria?.. Pojęcie modelu ekonometrycznego.3. Dane statystyczne.4.
ASYMETRIA CZASU 1. Jerzy Gołosz ABSTRACT
 Jerzy Gołosz ASYMETRIA CZASU 1 ABSTRACT W artykule analizowane jest rozróżnienie pomiędzy asymetrią w czasie procesów fizycznych i asymetrią samego czasu. Opierając się na założeniu, że każde rozwiązanie
Jerzy Gołosz ASYMETRIA CZASU 1 ABSTRACT W artykule analizowane jest rozróżnienie pomiędzy asymetrią w czasie procesów fizycznych i asymetrią samego czasu. Opierając się na założeniu, że każde rozwiązanie
KONSTRUKCJE STALOWE W EUROPIE. Jednokondygnacyjne konstrukcje stalowe Część 11: Połączenia zginane
 KONSTRUKCJE STALOWE W EUROPIE Jednokondygnacyjne konstrukcje stalowe Część 11: Połączenia zginane Jednokondygnacyjne konstrukcje stalowe Część 11: Połączenia zginane 11 - ii PRZEDMOWA Niniejsza publikacja
KONSTRUKCJE STALOWE W EUROPIE Jednokondygnacyjne konstrukcje stalowe Część 11: Połączenia zginane Jednokondygnacyjne konstrukcje stalowe Część 11: Połączenia zginane 11 - ii PRZEDMOWA Niniejsza publikacja
12 PODSTAWY MIKROSKOPII ELEKTRONOWEJ I JEJ WYBRANE ZASTOSOWANIA W CHARAKTERYSTYCE KATALIZATORÓW NOŚNIKOWYCH
 GRZEGORZ SŁOWIK Zakład Technologii Chemicznej, Wydział Chemii, Uniwersytet Marii Curie-Skłodowsiej, Pl. M. Curie-Skłodowskiej, 20-031 Lublin grzesiek.slowik@gmail.com Rozdział 12 PODSTAWY MIKROSKOPII ELEKTRONOWEJ
GRZEGORZ SŁOWIK Zakład Technologii Chemicznej, Wydział Chemii, Uniwersytet Marii Curie-Skłodowsiej, Pl. M. Curie-Skłodowskiej, 20-031 Lublin grzesiek.slowik@gmail.com Rozdział 12 PODSTAWY MIKROSKOPII ELEKTRONOWEJ
2. Wzory i formuły obliczeniowe
 13 2. Wzory i formuły obliczeniowe 2.1. Zapotrzebowanie na moc cieplną ze względu na potrzeby c.o. 5 czerwca 2006 została zatwierdzona norma PN-EN 12831:2006, będąca tłumaczeniem normy europejskiej EN
13 2. Wzory i formuły obliczeniowe 2.1. Zapotrzebowanie na moc cieplną ze względu na potrzeby c.o. 5 czerwca 2006 została zatwierdzona norma PN-EN 12831:2006, będąca tłumaczeniem normy europejskiej EN
Prowadzenie prac mierniczych 311[04].O1.05
![Prowadzenie prac mierniczych 311[04].O1.05](/thumbs/17/143377.jpg "Prowadzenie prac mierniczych 311[04].O1.05") MINISTERSTWO EDUKACJI i NAUKI Władysława Maria Francuz Prowadzenie prac mierniczych 311[04].O1.05 Poradnik dla ucznia Wydawca Instytut Technologii Eksploatacji Państwowy Instytut Badawczy Radom 2005 0
MINISTERSTWO EDUKACJI i NAUKI Władysława Maria Francuz Prowadzenie prac mierniczych 311[04].O1.05 Poradnik dla ucznia Wydawca Instytut Technologii Eksploatacji Państwowy Instytut Badawczy Radom 2005 0
Tadeusz Pabjan. Czas
 Tadeusz Pabjan Czas Czas jedna z fundamentalnych wielkości fizycznych będąca swego rodzaju miarą zmienności rzeczy, umożliwiającą określanie kolejności zdarzeń (topologia) i dokonywanie pomiarów odstępów
Tadeusz Pabjan Czas Czas jedna z fundamentalnych wielkości fizycznych będąca swego rodzaju miarą zmienności rzeczy, umożliwiającą określanie kolejności zdarzeń (topologia) i dokonywanie pomiarów odstępów
Stan równowagi chemicznej
 Stan równowagi chemicznej Metodyka i praktyka szkolna Scenariusz lekcji chemii w szkole ponadgimnazjalnej Scenariusz ten uzyskał I nagrodę w konkursie, pod tym samym tytułem, ogłoszonym na łamach naszego
Stan równowagi chemicznej Metodyka i praktyka szkolna Scenariusz lekcji chemii w szkole ponadgimnazjalnej Scenariusz ten uzyskał I nagrodę w konkursie, pod tym samym tytułem, ogłoszonym na łamach naszego
FUNKCJE LICZBOWE. Na zbiorze X określona jest funkcja f : X Y gdy dowolnemu punktowi x X przyporządkowany jest punkt f(x) Y.
 Y.") FUNKCJE LICZBOWE Na zbiorze X określona jest funkcja f : X Y gdy dowolnemu punktowi x X przyporządkowany jest punkt f(x) Y. Innymi słowy f X Y = {(x, y) : x X oraz y Y }, o ile (x, y) f oraz (x, z) f pociąga
FUNKCJE LICZBOWE Na zbiorze X określona jest funkcja f : X Y gdy dowolnemu punktowi x X przyporządkowany jest punkt f(x) Y. Innymi słowy f X Y = {(x, y) : x X oraz y Y }, o ile (x, y) f oraz (x, z) f pociąga
Czas i przestrzeń w teorii względności
 Czas i przestrzeń w teorii względności Żeby zrozumieć czas trzeba zrozumieć fizykę. Jak się dalej okaże nie ma innej drogi do fizyki, jak królewskiej drogi matematyki. Zastanowimy się w tym referacie czy
Czas i przestrzeń w teorii względności Żeby zrozumieć czas trzeba zrozumieć fizykę. Jak się dalej okaże nie ma innej drogi do fizyki, jak królewskiej drogi matematyki. Zastanowimy się w tym referacie czy
Umieszczanie zbiorów częściowo uporządkowanych w książce o minimalnej liczbie stron
 Uniwersytet Warszawski Wydział Matematyki, Informatyki i Mechaniki Anna Beata Kwiatkowska Umieszczanie zbiorów częściowo uporządkowanych w książce o minimalnej liczbie stron rozprawa doktorska napisana
Uniwersytet Warszawski Wydział Matematyki, Informatyki i Mechaniki Anna Beata Kwiatkowska Umieszczanie zbiorów częściowo uporządkowanych w książce o minimalnej liczbie stron rozprawa doktorska napisana
VADEMECUM MŚP. określenie statusu MŚP przedsiębiorstwa oraz wynikające z tego konsekwencje
 VADEMECUM MŚP określenie statusu MŚP przedsiębiorstwa oraz wynikające z tego konsekwencje Spis Treści Wstęp... 2 Wykaz skrótów... 3 I. Podstawowe definicje... 4 1. Przedsiębiorstwo... 4 2. Sektor MŚP...
VADEMECUM MŚP określenie statusu MŚP przedsiębiorstwa oraz wynikające z tego konsekwencje Spis Treści Wstęp... 2 Wykaz skrótów... 3 I. Podstawowe definicje... 4 1. Przedsiębiorstwo... 4 2. Sektor MŚP...
Wprowadzenie do programu
 Wprowadzenie do programu Wersja 4.2 www.geogebra.org Wprowadzenie do programu GeoGebra Data ostatniej modyfikacji: 6 Listopada, 2012. Aktualizacja dotyczy najnowszej wersji programu: GeoGebra 4.2. Podręcznik
Wprowadzenie do programu Wersja 4.2 www.geogebra.org Wprowadzenie do programu GeoGebra Data ostatniej modyfikacji: 6 Listopada, 2012. Aktualizacja dotyczy najnowszej wersji programu: GeoGebra 4.2. Podręcznik
Prawo Kennetha R. Hammonda i Roberta E. Goodina i prawa Charlesa Murray
 Prawo Kennetha R. Hammonda i Roberta E. Goodina i prawa Charlesa Murray Wstęp Na pierwszym wykładzie podkreślałem za Sztompką, że składnikami teorii są twierdzenia prawopodobne. W związku z tym wszędzie
Prawo Kennetha R. Hammonda i Roberta E. Goodina i prawa Charlesa Murray Wstęp Na pierwszym wykładzie podkreślałem za Sztompką, że składnikami teorii są twierdzenia prawopodobne. W związku z tym wszędzie
STOWARZYSZENIE HYDROLOGÓW POLSKICH
 Sfinansowano ze środków Narodowego Funduszu Ochrony Środowiska i Gospodarki Wodnej na zlecenie Krajowego Zarządu Gospodarki Wodnej Metodyka obliczania przepływów i opadów maksymalnych o określonym prawdopodobieństwie
Sfinansowano ze środków Narodowego Funduszu Ochrony Środowiska i Gospodarki Wodnej na zlecenie Krajowego Zarządu Gospodarki Wodnej Metodyka obliczania przepływów i opadów maksymalnych o określonym prawdopodobieństwie
CZAS I WIECZNOŚĆ W FILOZOFII PRZYRODY
 Czas i wieczność w filozofii przyrody 183 CZAS I WIECZNOŚĆ W FILOZOFII PRZYRODY Poszukiwanie czegoś trwałego jest jednym z najgłębszych instynktów przywodzących ludzi do filozofii. [ ] filozofowie z wielką
Czas i wieczność w filozofii przyrody 183 CZAS I WIECZNOŚĆ W FILOZOFII PRZYRODY Poszukiwanie czegoś trwałego jest jednym z najgłębszych instynktów przywodzących ludzi do filozofii. [ ] filozofowie z wielką
EGZAMIN MATURALNY 2011 MATEMATYKA
 Centralna Komisja Egzaminacyjna w Warszawie EGZAMIN MATURALNY 0 MATEMATYKA POZIOM PODSTAWOWY MAJ 0 Egzamin maturalny z matematyki poziom podstawowy Zadanie (0 ) Obszar standardów i tworzenie informacji
Centralna Komisja Egzaminacyjna w Warszawie EGZAMIN MATURALNY 0 MATEMATYKA POZIOM PODSTAWOWY MAJ 0 Egzamin maturalny z matematyki poziom podstawowy Zadanie (0 ) Obszar standardów i tworzenie informacji
Wprowadzenie do środowiska R
 Łukasz Komsta 21 sierpnia 2004 Spis treści 1 Wstęp 3 2 Pierwsze kroki 3 2.1 Najprostsze obliczenia.................................. 4 2.2 Przykłady operacji na wektorach............................ 4
Łukasz Komsta 21 sierpnia 2004 Spis treści 1 Wstęp 3 2 Pierwsze kroki 3 2.1 Najprostsze obliczenia.................................. 4 2.2 Przykłady operacji na wektorach............................ 4
WSZECHŚWIAT: NIESKOŃCZONOŚĆ I CZAS
 FILOZOFIA I NAUKA Studia filozoficzne i interdyscyplinarne Tom 2, 2014 Marek Łagosz 1 Instytut Filozofii Uniwersytetu Wrocławskiego WSZECHŚWIAT: NIESKOŃCZONOŚĆ I CZAS STRESZCZENIE Rozważania podjęte w
FILOZOFIA I NAUKA Studia filozoficzne i interdyscyplinarne Tom 2, 2014 Marek Łagosz 1 Instytut Filozofii Uniwersytetu Wrocławskiego WSZECHŚWIAT: NIESKOŃCZONOŚĆ I CZAS STRESZCZENIE Rozważania podjęte w