gruparectan.pl MECHANIKA W PIGUŁCE Mały przewodnik po podstawach z Mechaniki Ogólnej Rectan
|
|
|
- Izabela Pietrzak
- 5 lat temu
- Przeglądów:
Transkrypt

1 MECHANIKA W PIGUŁCE Mały przewodnik po podstawach z Mechaniki Ogólnej Rectan
2 Spis Treści Wprowadzenie...3 Rozdział 1. Rozwiązywanie belek i ram statycznie wyznaczalnych Podstawowe jednostki i zależności między nimi Zależności kątowe Właściwości funkcji liniowej Funkcja kwadratowa i jej własności Kontrukcje statycznie wyznaczalne i niewyznaczalne Rodzaje podstawowych podpór i ich działanie Zasada działania sił w przegubie Rozpatrywanie działania siły pod kątem i jej rzut na oś X i Y Obciążenie rozłożone Moment zginający Wykresy sił wewnętrzych i ich wzory dla układów prostych Przykład nr 1: Obliczyć reakcje podporowe i siły wewnętrzne w belce statycznie wyznaczalnej Przykład nr 2: Wyznaczyć reakcje i obliczyć MTN w ramie statycznie wyznaczalnej Rozdział 2. Rozwiązywanie kratownic statycznie wyznaczalnych Identyfikacja prętów zerowych Metoda równoważenia węzłów Metoda Rittera Przykład nr 1: Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów, Rittera i Cremony Rozdział 3. Charakterystyki geometryczne figur płaskich Wprowadzenie do obliczeń charakterystyk figur płaskich Momenty statyczne figur płaskich Momenty bezwładności figur płaskich Momenty dewiacji oraz główne centralne momenty bezwładności Twierdzenie Steinera Przykład nr 1: Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności Przykład nr 2: Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności Zakończenie O Nas
3 Wprowadzenie Napisaliśmy Mechanika w pigułce po to by stworzyć darmowy poradnik dla ludzi rozpoczynających swoją przygodę na studiach inżynierskich. Z doświadczenia wiemy, że studia te nie należą do najłatwieszych. Poradnik ten pozwoli Ci przyswoić podstawy przedmiotu jakim jest Mechanika Ogólna. Oprócz zagadnień teoretycznych zawiera także przykłady pokazujące jak krok po kroku poradzić sobie z obliczaniem zadań, które z pewnością spotkasz na swojej drodze studując kierunki techniczne. Sam e-book możesz także traktować jako takie mini kompendium z podstawowymi zagadnieniami, do którego zawsze możesz zajrzeć, by odświeżyć swoją wiedzę zwłaszcza przed kolokwium lub egzaminem. Pamiętaj jednak, że nie zastąpi Ci kompletnie wiedzy jaką możesz znaleźć w książkach bądź w materiałach z wykładów. Cały poradnik składa się z trzech części. W rozdziale pierwszym zebrano materiały, które pozwolą lepiej zrozumieć zagadnienia związane z rozwiązywaniem układów statycznie wyznaczalych takich jak: belki i ramy. W drugiej części z kolei dowiemy się więcej o kratownicach. Ostatnia część jest poświęcona charakterystykom geometrycznym figur płaskich. Zapraszamy do lektury! Zespół Rectan 3

4 Rozdział 1. Rozwiązywanie belek i ram statycznie wyznaczalnych 4
5 1. Podstawowe jednostki i zależności między nimi Jednostki używane w obliczeniach budowlanych zdecydowanie różnią się od tych używanych na codzień. Warto znać ich nazwy oraz podstawowe zależności między nimi. Podstawową jednostką siły jest niuton. Jest on równy nastepującej wartości: N = m g = 1 kg m/s 2 Gdzie : N niuton m masa g grawitacja Zazwyczaj siła,,p jest podawana w kn (kiloniutonach). Mamy zatem następujące zależności : 10 N 1 kg 1 kn = 1000 N = 100 kg 1 MN = N = kg Często spotykamy się także z jednostkami powierzchni,,a : 1 mm 2 = 1 mm 1 mm 1 cm 2 = 10 mm 10 mm = 100 mm 2 1 dm 2 = 10 cm 10 cm = 100 mm 100mm = mm 2 1 m 2 = 10 dm 10 dm = 100 cm 100cm = 1000 mm 1000mm = mm 2 Mamy także momenty statyczne,,s : 1 mm 3 = 1 mm 1 mm 1 mm 1 cm 3 = 10 mm 10 mm 10 mm = 1000 mm 3 1 dm 3 = 10 cm 10 cm 10 cm = 100 mm 100mm 100mm = mm 3 1 m 3 = 10 dm 10 dm 10 dm = 100 cm 100cm 100cm = 1000 mm 1000mm 1000mm = mm 3 5
6 Ostatnią jednostką wartą wspomnienia są momenty bezwładności,,j : 1 mm 4 = 1 mm 1 mm 1 mm 1mm 1 cm 4 = 10 mm 10 mm 10 mm 10 mm = mm 4 1 dm 4 = 10 cm 10 cm 10 cm 10 cm = 100 mm 100mm 100mm 100mm = mm 4 1 m 4 = 10 dm 10 dm 10 dm 10 dm = 100 cm 100cm 100cm 100cm = 1000 mm 1000mm 1000mm 1000mm = mm 4 Z powodu bardzo długiego zapisu zazwyczaj stosuje się skróconą formę w postaci wartości pomnożonej przez dziesięć do odpowiedniej potęgi, np.: 2 m 4 = mm cm 3 = mm 10mm 10mm = mm 4 lub mm 4 Czasami nawet wartości bardzo małe potrzebujemy wyrazić w jednostkach wiekszych. Wtedy stosujemy zapis z wykorzystaniem potegi ujemnej, który informuje nas o tym, ile zer powinno być po przecinku przed naszą liczbą np.: 40 mm 4 = 40 0,1 cm 0,1 cm 0,1 cm 0,1 cm = cm 4 lub cm 4 Można powiedzieć, że jeżeli przesuwamy przecinek w lewo to odejmujemy liczbę od wykładnika potęgi, a jeśli w prawo to dodajemy. Czasami musimy wykonać bardziej złożone obliczenia, ale zasada jest ta sama, np. : 2 kn m 2 = N 100cm 100cm = N 10000cm 2 = 2 1 N 10cm 2 = 2 N 10 1 cm 2 = 0,2 N cm 2 Płynna zamiana jednostek wymaga wprawy, więc warto poświęcić trochę czasu na rozpisanie wszystkiego, zrozumienie i nie śpieszyć się. 6
7 2. Zależności kątowe gruparectan.pl W czasie studiów budowlanych wiele razy spotykamy się z problemem, gdy jakaś siła, obciążenie lub podpora występują pod kątem. W takiej sytuacji warto się zapoznać z podstawowoymi zależnościami kątowymi oraz ich wartościami najczęściej używanymi w obliczeniach. Mamy cztery podstawowe zależności w trójkącie: sinus (sin) cosinus (cos) tangens ( tg) cotangens (ctg). Zależności te można opisać następująco: sinα = b x Sinus alfa jest równy stosunkowi przyprostokątnej znajdującej się naprzeciwko kąta do przeciwprostokątnej trójkąta. 7
8 cosα = a x Cosinus alfa jest równy stosunkowi przyprostokątnej leżącej przy kącie do przeciwprostokątnej trójkąta. tgα = b a Tangens alfa jest równy stosunkowi przyprostokątnej znajdującej się naprzeciwko kąta do przyprostokątnej leżącej przy kącie. ctgα = a b Cotangens alfa jest równy stosunkowi przyprostokątnej leżącej przy kącie do przyprostokątnej znajdującej się naprzeciwko kąta. Warto znać i rozumieć powyższe zależności, ponieważ są one bardzo często używane zarówno podczas obliczeń inżynierskich i prac wykonawczych. Podstawowe wartości dla kątów 0, 30, 45, 60 oraz 90 : Kąt α Sinα Cosα Tgα Ctgα
9 3. Właściwości funkcji liniowej Funkcja liniowa ma postać: y = a x + b Gdzie: y wartość funkcji a współczynnik kierunkowy prostej b wyraz wolny Wykresem funkcji liniowej jest prosta. W zależności od współczynnika,,a funkcja może być rosnąca, stała lub malejąca. A) a > 0 Wykres funkcji będzie rosnący, czyli wraz ze wzrostem wartości,,x wzrastać będzie wartość,,y. 9
10 B) a = 0 Wykres funkcji będzie stały. 10
11 C) a < 0 Wykres funkcji będzie malejący, czyli wraz ze wzrostem wartości,,x wartość,,y będzie maleć. 11
12 Miejsce zerowe funkcji możemy wyznaczyć ze wzoru: x 0 = b a Gdzie : x0 miejsce zerowe funkcji a współczynnik kierunkowy prostej b wyraz wolny 12
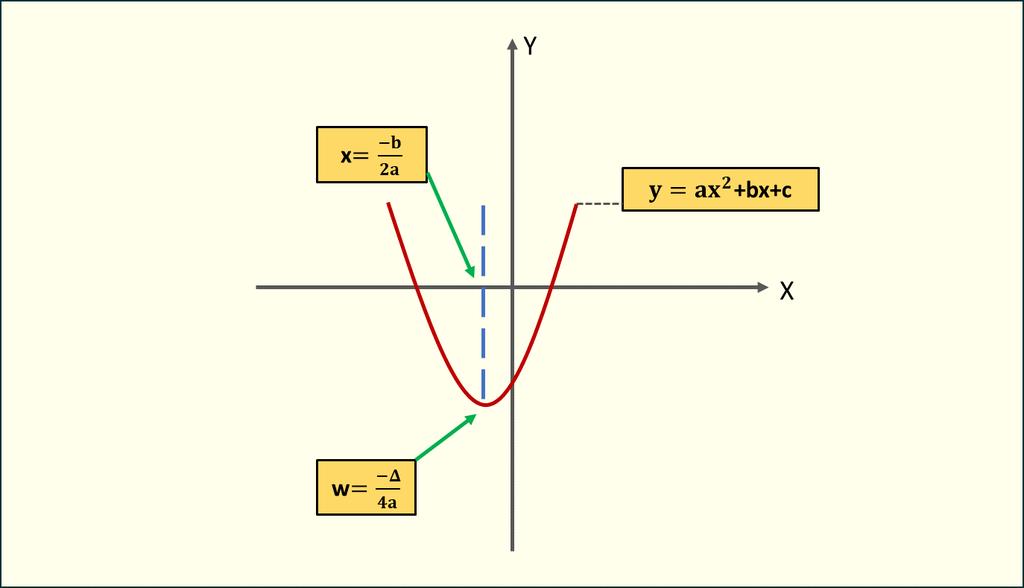
13 4. Funkcja kwadratowa i jej własności Funkcja kwadratowa jest jedną z najczęściej spotykanych funkcji matematycznych. Z tego powodu warto przyjrzeć się jej bliżej i zapoznać się z jej formą oraz własnościami. Funkcję kwadratową opisać można równaniem: y = ax 2 + bx + c Gdzie : y wartość funkcji a,b,c stałe funkcji x zmienna funkcji Wykresem tejże funkcji jest parabola, której ramiona mogą być skierowane w góre lub w dół w zależności od znaku przed stałą,,a. A) a > 0 13
14 B) a < 0 Jeżeli,,a jest równe zero to funkcja kwadratowa staje się liniową. Aby określić miejsca zerowe funkcji kwadratowej możemy użyć następujących wzorów: = b 2 4 a c Gdzie : współczynnik potrzebny do obliczenia miejsc zerowych zwany wyróżnikiem funkcji kwadratowej b,a,c stałe funkcji kwadratowej Kiedy obliczymy wyróżnik możemy określić ilu miejsc zerowych, czyli punktów przecięcia funkcji z osią,,x możemy się spodziewać. < 0 brak miejsc zerowych = 0 jedno miejsce zerowe > 0 dwa miejsca zerowe 14
15 Aby kontynuować obliczenia musimy znać pierwiastek z wyróżnika funkcji -. Następnie korzystając ze wzorów możemy obliczyć warość zmiennej,,x, dla której y = 0. x 1 = x 2 = b 2a b + 2a Funkcja przyjmuje wartość ekstremalną dla argumentu: x = b 2a Jeżeli: a < 0 ekstremum będzie wartością maksymalna a > 0 ekstremum będzie wartością minimalną Wartość ekstremalną liczymy ze wzoru: w = 4a Postaram się to zobrazować na rysunkach poniżej. 15
 a > 0")
16 A) a < 0 B) a > 0 16

17 5. Kontrukcje statycznie wyznaczalne i niewyznaczalne Konstrukcje statycznie wyznaczalne w uproszczeniu to takie, w których siły wewnętrzne pochodzą tylko i wyłącznie od obciążenia. Stopień statycznej niewyznaczalności w tego typu kontrukcjach wynosi zero. SSN w 3 t = 0 Gdzie : t - liczba tarcz w - liczba więzów Najprostszym przykładem tego typu konstrykcji jest belka podparta z jednej strony podporą przegubowo - przesuwną, a z drugiej strony podporą przegubowo - nieprzesuwną. Dzięki możliwości przesuwu na podporze z lewej strony belka może spokojnie pracować. Oznacza to, że w przypadku działania czynników zewnętrzych, np. temperatury, kiedy materiał ulega wydłużeniu lub skróceniu nie powoduje to dodatkowych naprężeń w przekroju elementu. Równocześnie układ pozostaje w równowadze i jest nieruchomy. Możemy zatem wyznaczyć reakcje podporowe i siły zewnętrzne z warunków równowagi. 17
18 Każdy element pozostający w równowadze musi spełniać trzy podstawowe warunki: A) Suma sił na oś X elementu równa się zero P x = 0 Oznacza to, że wartość wszystkich sił działających prostopadle do osi elementu musi się równoważyć. B) Suma sił na oś Y elementu równa się zero P y = 0 Oznacza to, że wartość wszystkich sił działających równolegle do osi elementu musi się równoważyć. C) Suma momentów równa się zero M p = 0 Oznacza to, że suma momentów względem każdego punktu,,p przyjętego do obliczeń elementu musi się równoważyć.... Konstrukcje statycznie niewyznaczalne to takie, w których siły wewnętrzne pochodzą od obciążenia oraz naprężeń spowodowanych odkształceniami elementu. Stopień statycznej niewyznaczalności w tego typu przypadkach będzie większy od zera. SSN w 3 t > 0 Gdzie : t- liczba tarcz w- liczba więzów 18

19 Przykładem tego typu konstrukcji jest np. belka podparta z obu stron podporą przegubowo nieprzesuwną. Konstrukcja ta nie ma możliwości ruchu. Z tego powodu w przekroju elementu bedą powstawać dodatkowe naprężenia w przekroju spowodowane działaniem czynnikami zewnętrznymi. SSN w 3 t = = 1 Widzimy zatem, że układ jest przesztywniony, posiada on jedną reakcję wiecej niż potrzeba, aby zapewnić równowagę. Układów takich nie policzymy korzystając tylko z podstawowych warunków równowagi. Z reguły jest to proces nieco bardziej skomplikowany. 19
 Podpora przegubowo przesuwna Podpora ta odbiera konstrukcji jedną możliwość ruchu.")
20 6. Rodzaje podstawowych podpór i ich działanie 1) Podpora przegubowo nieprzesuwna Podpora ta odbiera konstrukcji dwie możliwości ruchu. Blokuje ruch w pionie i poziomie oraz możliwy jest obrót elementu. 2) Podpora przegubowo przesuwna Podpora ta odbiera konstrukcji jedną możliwość ruchu. Blokuje ruch w pionie oraz możliwy jest obrót elementu i ruch w poziomie. 20
21 3) Wspornik Podpora ta odbiera konstrukcji 3 stopnie swobody. Żaden ruch nie jest zatem możliwy. 21

22 7. Zasada działania sił w przegubie Przegub to miejsce spotkania dwóch elementów (tarcz lub prętów głównie), w którym przekazywane są siły pionowe i poziome. Siły te jak pokazano na rysunku mają przeciwne zwroty i się równoważą. Ponieważ możliwy jest obrót, suma momentów w przegubie jest zawsze równa zero. Jest to bardzo ważny warunek, często wykorzystywany do obliczania sił oddziałujących na dany element konstrukcyjny. M i = 0 22

23 8. Rozpatrywanie działania siły pod kątem i jej rzut na oś X i Y Siłę pod kątem możemy rozłożyć na duże składowe. Jedna składowa działa pionowo na oś x, czyli prostopadle do elementu, a druga poziomo na oś y,czyli równolegle do elementu. Do obliczenia wartości siły w danym kierunku zazwyczaj wykorzystuje się zależności kątowe sin i cos: 23
24 sinα = b a b = a sinα cosα = c a c = a cosα Stąd siły Px i Py będą wynosić następująco: sin30 = P P X P = P X sin30 cos30 = P P Y P = P Y cos30 lub sin60 = P P Y P = P Y sin60 cos60 = P P X P = P X cos60 24
 Obciążenie rozłożone równomiernie q = 20kN/m Q = q l = 20 2 = 40kN Gdzie: Q siła wypadkowa q wartość obciążenia rozłożonego l całkowita")
25 9. Obciążenie rozłożone gruparectan.pl Zazwyczaj wyróżniamy dwa typy obciążenia rozłożonego: A) Obciążenie rozłożone równomiernie q = 20kN/m Q = q l = 20 2 = 40kN Gdzie: Q siła wypadkowa q wartość obciążenia rozłożonego l całkowita długość, na której działa obciążenie rozłożone Jest to obciążenie rozłożone wzdłuż całego elementu lub jego fragmentu. Jednostką tego obiążenia bedzie siła przypadająca na ustaloną długość zazwyczaj kn/m (kiloniuton na metr). Wypadkową,,Q tego obciążenia będzie siła równa iloczynowi wartości obciążenia oraz długości, na której występuje przyłożona równo w połowie tej długości. 25
26 B) Obciążenie rozłożone po trójkącie, q = 20kN/m Q = 1 2 q l = = 30kN 2 Gdzie : Q siła wypadkowa q wartość obciążenia rozłożonego l całkowita długość, na której działa obciążenie rozłożone Jest to obciążenie rozłożone wzdłuż całego elementu lub jego fragmentu. Jednostką tego obciążenia będzie siła przypadająca na ustaloną długość zazwyczaj kn/m (kiloniuton na metr). Wypadkową,,Q tego obciążenia będzie siła równa iloczynowi połowy wartości obciążenia oraz długości, na której występuje przyłożona w jednej trzeciej wysokości trójkąta od jego podstawy lub dwóch trzecich od jego wierzchołka. 26

27 10. Moment zginający gruparectan.pl Momentem zginającym nazywamy parę sił, które powodują obrót elementu. Wzór określający wartość momentu działajacego w danym punkcie to: M = P h Gdzie: P jest to siła działająca na dany element h jest to ramię, czyli odległość siły do punktu względem, którego liczymy moment Znak wartości momentu zależy od kierunku działania momentu na dany punkt. Zazwyczaj przyjmuje się, że jeżeli moment,,kręci w prawo to jego znak jest dodatni. Jeżeli w lewo to jego znak jest ujemny. Jak widać na powyższym obrazku para sił na ramieniu,,h powoduje obrót elementu w prawo, czyli moment będzie miał znak dodatni. Patrząc na rysunek poniżej widzimy, że mamy sytuację odwrotną i wartość momentu będzie ujemna. Jeżeli siła przechodzi przez punkt względem, którego liczymy wartość momentów dla danego punktu to nie powoduje ona obrotu danego elementu i wartość momentów pochodzących od tej siły będzie wynosić zero. 27


28 Popatrzmy teraz na sytuację przedstawioną na poniższym rysunku. Mamy belkę, na która dzialają dwie sily P1 i P2. Powiedzmy, ze chcemy znać calkowitą wartość momentów w punkcie podarcia na podporze W1 więc: M W1 = P P 2 X = P 2 X Suma momentów będzie równa sile P1 dzialającej na ramieniu zerowym, bo przechodzi ona przez punkt, względem którego liczymy i sile P2 na ramieniu x, ponieważ znajduje się ona w odległości x od punktu podparcia belki na podporze W1. Jeżeli chcielibyśmy policzyć sumę momentów względem punktu podparcia belki na podporze W2 to obliczenia prezentują się następujaco: 28

29 M W2 = P P 2 0 = 0 Wynika to z faktu, że dwie siły przechodzą przez punkt podparcia belki na podporze W2, zatem wartość ramion, na których działają owe siły wynosi zero. Zakładamy oczywiście, że obie siły działają w osiach belki, czyli mamy sytuację przedstawioną na poniższym obrazku. Mimo, że do obliczeń zakładamy, że belka jest elementem bardzo cieńkim w rzeczywistości ma ona przekrój o odpowiednich wymiarach. Punkt podparcia na podporze W2 to ta czarna kropka. Zazwyczaj rozpatrując dany element konstrukcyjny zakładamy, że siły działają w osiach przekroju elementu, czyli tak jak powyżej. Pozwala nam to uprościć rysunek belki i sprowadzić go do linii prostej. 29

30 11. Wykresy sił wewnętrzych i ich wzory dla układów prostych Dla niektórych prostych elementów konstrukcyjnych jesteśmy w stanie wyznaczyć wykresy sił wewnętrzych i ich wartości korzystając z prostych wzorów. Jest to niezykle użyteczne i pozwala nam z mniejszą lub wiekszą dokładnością oszacować jak wykres powinien wyglądać nawet w bardziej skomplikowanych elementach. 1. Na początek zajmiemy się belkami wspornikowymi. A) Siła skupiona Schemat ten jest bardzo prosty i w zasadzie wszystko sprowadza się do obliczenia reakcji we wsporniku. 30

31 B) Moment przyłożony Na element działa tylko moment skupiony, więc moment we wsporniku będzie go równoważył. C) Siła równomiernie rozłożona 31

32 Wartość momentu będzie równa wartości siły równomiernie rozłożonej pomnożonej przez odległość, na której ona działa oraz połowę tej odległości. Wypadkowa tej siły wypada idealnie w środku, zatem ramię, na którym działa moment jest równe połowie długości, na której działa siła równomiernie rozłożona. Innymi słowy: M = q a 1 2 a = q a2 2 Wartość siły tnącej jest równa wartości siły wypadkowej obciążenia Teraz omówimy belki swobodnie podparte. A) Moment skupiony Wartość reakcji podporowych jest równa wartości momentu podzielonej przez dlugość całkowitą belki. Siły tnące równe są wartości reakcji podporowych. Wartości momentów liczymy mnożąc wartość reakcji podporowej przez odległość pomiędzy podporą, a punktem przyłożenia momentu. 32

33 B) Siła skupiona Na początek spróbujmy policzyć reakcje w tej belce i sprawdzmy czy wzory są poprawne. M B = 0 R 1 (a + b) P b = 0 33
 = P a P a R 2 = (a + b) Widzimy")

34 R 1 (a + b) = P b P b R 1 = (a + b) M A = 0 R 2 (a + b) + P a = 0 R 2 (a + b) = P a P a R 2 = (a + b) Widzimy zatem, że wzory na reakcje podporowe są poprawne.spróbujmy policzyć wartość maksymalną momentu. M x = P b (a + b) a 34

35 M x = P b a (a + b) Zatem maksymalny moment jest równy iloczynowi wartości reakcji podporowej oraz odległości od podpory. Wzór jest zgodny. Jako ostatnie zostały nam wartości sił tnących. Są one równe wartości reakcji podporowych. C) Obciążenie równomiernie rozłożone Wartości reakcji podporowych są równe wartości siły wypadkowej podzielonej przez dwa, ponieważ obciążenie jest przekazywane jednakowo na każdą z dwóch podpór. Wartości sił tnących równe są reakcjom podporowym. Moment obliczymy jako iloczyn siły wypadkowej obciążenia przyłożonej w połowie długości elementu i jest odległości od podpory. Mamy zatem: M = q a a 35
36 Pierwsza wartość jest to reakcja podporowa, która jest stała. Druga natomiast to połowa odległości na której rozpatrujemy działanie obciążenia. My chcemy znać moment równo w środku przęsła, więc za drugie,,a musimy podstawić połowę tej wartości. Zatem: M = q a q a2 a = 2 8 Wszystko się zgadza. Warto znać te wzory oraz wiedzieć skąd się biorą. Z czasem są one nieocenioną pomocą w trakcie obliczeń i pozwalają wyrobić sobie nawyk przewidywania kształtu wykresów w skomplikowancyh elementach. 36


37 12. Przykład nr 1: Obliczyć reakcje podporowe i siły wewnętrzne w belce statycznie wyznaczalnej 1. Schemat statyczny 2. Stopień statycznej niewyznaczalności Liczba tarcz = 3 Liczba więzi = 9 3t = w 3 x 3 = 9 9 = 9 Warunek spełniony. Układ jest statycznie wyznaczalny. 37


38 3. Reakcje podporowe Suma momentów w przegubie jest równa zero. Korzystając z tego faktu możemy wyznaczyć reakcje podporowe rozkładając belkę na tarcze i układając odpowiednie równania. Najpierw policzymy reakcję pionową w węźle nr 5, obliczając sumę momentów względem węzła nr 4 dla tarczy nr III M 4 = 0 V 5 3 m + 15 sin(45 ) 3 m = 0 V 5 = 10.61kN 38


39 Następnie dodajemy drugą tarczę i liczymy reakcję w węźle nr 3 obliczając sumę momentów względem węzła nr 2. M 2 = 0 V 3 3 m + 10 knm + 15 kn sin(45 ) 7 m V 5 7 m = 0 3V knm kn 7 m kn 7 m = 0 3V 3 = 10 kn V 3 = 3.33kN Ostatnim krokiem jest rozpatrzenie całej belki i wyznaczenie reakcji we wsporniku korzystając z warunków równowagi. 39
 3 m V 5 3 m = 0 M 1 + 6 m 16.67 kn 100 knm + 10 knm + 3.33 knm + 31.82 knm 31.82 knm = 0 M 1 = 100 knm 100 knm + 10 knm + 3.")
40 P Y = 0 H kn cos (45 ) = 0 H 1 = 10.61kN P X = 0 V 1 10 kn/m 2 m + V 3 + V 5 15 kn sin (45 ) = 0 V 1 20 kn kn kn kn = 0 V 1 = 16.67kN M 4 = 0 M 1 + V 1 6 m 10 kn/m 2 m 5 m + V 3 1 m + 15 kn sin(45 ) 3 m V 5 3 m = 0 M m kn 100 knm + 10 knm knm knm knm = 0 M 1 = 100 knm 100 knm + 10 knm knm M 1 = knm 4. Siły wewnętrzne Następnym krokiem jest obliczenie sił wewnętrznych w belce. W tym celu musimy ciąć belkę w miejscach przyłożenia sił i układać równania do wyliczenia sił wewnętrznych. 40
41 4.1. Momenty Do obliczania momentów potrzebne nam są tylko siły pionowe i momenty skupione. Pomijamy wszelkie siły poziome, ponieważ przechodzą one przez oś belki. Oznacza to, że ramię działania tych sił wynosi zero, a co za tym idzie, moment działający na belkę od pochodzący od tych rownież wynosi zero. Przedział 1-2 0<x<2 M X kn x kn 10 kn/m x 1 2 x = 0 M X = 5x x Otrzymaliśmy funkcję kwadratową, więc konieczne jest policzenie miejsc zerowych tej funkcji aby móc narysować jej wykres. Musimy pamietać, że wykres funkcji kwadratowej nie jest linią prostą, lecz parabolą. Do policzenia miejsc zerowych potrzebne nam bedą podstawowe wzory matematyczne. 5x x = 0 Δ = b 2 4ac = ( 16.67) = Δ = 3.36 b + Δ x 1 = = = 2 2a 2 5 b Δ x 2 = = = a

42 Mamy zatem dwa miejsca zerowe. Jedno w odległości 1.33 metra od wspornika, a drugie na przegubie. Dla x = 0 wartość funkcji wynosi: = knm Jest to wartość momentu we wsporniku. Przedział 4-5 0<x<3 Policzymy to od końca belki, ponieważ uprości to obliczenia. Mamy do rozpatrzenia fragment belki, na którym wystepują tylko dwie siły. M X + x 15 kn sin(45 ) V 5 x = 0 M X = 0 Na tym odcinku nie występują żadne momenty zginające. Przedział 1-2 Do obliczenia środkowej części belki musimy znać siły w pierwszym przegubie od strony wspornika. 42

43 P X = 0 V 1 2m 10 kn/m + V P = kn 2 m 10 kn/m + V P = 0 V P = 3.33 kn Y = 0 H 1 + H P = 0 H p = kn Znając reakcje w przegubie możemy obliczyć momenty w środkowej części belki. Przedział 2-3 0<x<3 M X V P x = 0 M X = x V P M X = 3.33x 43

44 Obliczmy wartość momentu na podporze: M 3 = = 10kNm Na podporze występuje moment skupiony, który redukuje wykres momentów do zera, ponieważ jest przeciwnego znaku. Zatem nasz wykres momentów będzie wyglądał następująco: 4.2. Siły tnące Do obliczania sił tnących potrzebne nam są tylko siły pionowe. Przedział 1-2 0<x<2 44
 = 16.67kN T (2) = 10 2 + 16.67 = 3.")

45 V kn/m x + T (X) = 0 T (X) = +V 1 10x T (X) = 10x T (0) = T (0) = 16.67kN T (2) = = 3.33kN Przedział 2-4 0<x<4 T (X) V 3 = 0 T (X) = V p T (X) = 3.33 kn Z rysunku widzimy, że wykres sił tnących będzie niezmienny do podpory, a na podporze następuje redukcja sił tnących do zera. Czyli od podpory wykres będzie zerowy. Przedział 4-5 0<x<3 45


46 T X + 15 kn sin(45 ) V 5 = 0 V kn sin(45 ) = T X T X = 0 W tym przekroju belki nie wystepują żadne siły tnące. Wykres sił tnących będzie prezentował się następująco: 4.3. Siły normalne Do obliczenia sił normalnych bedą nam potrzebne tylko siły poziome. 46

47 Z rysunku możemy odczytać, że w układzie wystepują tylko dwie siły poziome na obu końcach belki. Z tego wynika, że cały element będzie rozciągany, ponieważ siły bedą przenoszone na każdą tarcze poprzez przeguby. Nasz końcowy wykres sił normalnych będzie wygladał następująco: 47

48 13. Przykład nr 2: Wyznaczyć reakcje i obliczyć MTN w ramie statycznie wyznaczalnej 1. Układ statyczny Rys. 1. Układ statyczny 48

49 2. Stopień statycznej niewyznaczalności SSN Liczba tarcz t=2 Liczba więzi n= 2+2+2=6 Wzór: 3t=n 3 * 2 = 6 6=6 Układ jest statycznie wyznaczalny. Rys. 2. Podział na tarcze 49
50 3. Reakcje podporowe Rys. 3. Reakcje podporowe do obliczenia Mamy cztery niewiadome do obliczenia: M2, V2, V4 i H4: Tarcza nr I, część 1-2 M W1 = 0 20kN 2m + M 2 = 0 M 2 = 40kNm 50
51 Tarcza nr II, część F Y = 0 20kN + H 4 = 0 H 4 = 20kN M W1 = 0 10kN/m 2m 1 2 2m + 30kNm V 4 3m H 4 2.5m = 0 50kN V 4 3m H 4 2.5m = 0 50kN 3V 4 ( 20kN) 2.5m = 0 50kN 3V kN 3V 4 = 100kN V 4 = kN F x = 0 V kN + V 4 = 0 V 2 20kN kN V 2 = kN Lub możemy wszystko obliczyć przy pomocy układu równań: { 10kN/m 2m 1 2 2m + 30kNm V 4 3m H 4 2.5m = 0 20kN + H 4 = 0 V kN + V 4 = 0 20kN 2m + M 2 = 0 Z kolei jeżeli napotkamy trudniejsze przypadki obliczeń możemy dokonać przy pomocy macierzy. Suma momentów dla całej ramy (sprawdzenie): M W1 = 0 M 2 2m 20kN + 10kN 2m 1 2 2m + 30kNm + H 4 2.5m V 4 3m = 0 40kNm 40kNm + 20kNm + 30kNm + 50kNm 100kNm = 0 0 = 0 51
52 Rys. 4. Reakcje podporowe obliczone 52

53 4. Obliczanie składowych sił pod kątem na podporze w węźle W4 Rys. 5. Obliczenie składowych sił pod kątem na podporze w węźle W4 V py = 33.33kN cos 22 = 30.90kN V px = 33.33kN sin 22 = 12.49kN H py = 20kN cos 68 = 7.49kN H px = 20kN sin 68 = 18.54kN 53

54 5. Siły wewnętrzne Rys. 6. Podział ramy 54
55 5.1. Siły w przegubie Rys. 7. Siły w przegubie P Y = 0 H 1 = 20kN = 0 H 1 = 20kN P X = kN + V 1 = 0 V 1 = 13.33kN 55

56 5.2. Siły tnące Przedział 1-1 P Y = 0 T x = 0 Siła tnąca w punkcie 1 będzie równa 0, ponieważ nie występuje reakcja podporowa poprzeczna
57 Przedział 2-2 P Y = 0 T X + 20kN = 0 T X = 20kN W punkcie nr 2 występuje skok o 20kN, więc T X = 20kN... 57

58 Przedział x 2 P xw1 = 0 T X = 0 T X1 = 13.33kN P xw3 = 0 T X x 1 2 x T X3 = x 2 T X3 = = 33.33kN W węźle nr 1 wartość tnącej będzie równa równoległej reakcji podporowej W węźle nr 3 wartość tnącej będzie równa sumie wartości z węzła nr 1 i wypadkowej z obciążenia. Siły z tych samych zwrotów

59 Przedział 5-5 P y = 0 T X + 20kN sin sin 22 = 0 T X = 6.05kN W punkcie nr W4 wartość będzie równa rożnicy sumy rzutów na oś x reakcji podporowych. Siły są równych zwrotów. Na pręcie 4-5 nie występuje żadna zmiana wartości sił tnących. T X = H PX V PY = 18.54kN 12.49kN = 6.05kN... Przedział

60 To samo co w przedziale 5-5. Żadna siła nie dochodzi.... Rys. 8 Wykres sił tnących 60
61 5.3. Siły normalne Siły normalne możemy liczyć analogicznie do sił tnących, ale uwzględniamy tylko siły podłużne. Przedział 1-1 Wzdłuż pręta 1-2 działa reakcja podporowa. P x = 0 N X = 0 N X = 13.33kN... 61

62 Przedział 2-2 P x = 0 N X = 0 N X = 13.33kN... Przedział 3-3 Wzdłuż pręta 1-3 działa siła podłużna 20kN. 62
63 P y = 0 N X + 20 = 0 N X = 20kN... Przedział 5-5 P x = 0 20kN cos cos 22 N X = 0 N X = 38.39kN... 63

64 Przedział 4-4 Wzdłuż pręta 3-4 działają siły podłużne pochodzące od reakcji podporowych. Obie siły ściskają pręt. P y = 0 20kN cos cos 22 N X = 0 N X = 38.39kN... 64

65 Rys. 9. Wykres sił normalnych 65
66 5.4. Momenty zginające Wykresy momentów najprościej jest policzyć licząć wartości tych wykresów w punktach przyłożenia siły. Uwzględniamy siły poprzeczne i momenty skupione. Siły podłużne nie dają wartości momentów, ponieważ ich ramię wynosi 0. Zaczynamy od podpór. Przedział 1-1 Moment w tym przedziale będzie równy momentowi na podporze. M = 0 M X + 40kNm = 0 M X = 40kNm... 66
67 Przedział x 2 M = 0 M X + 40kNm 20kN x = 0 M X = 40kNm 20kN x M 2 = 40kNm 20kN 0 = 40kNm M 1 = 40kN 20kN 2m = 0kNm Od punktu, w którym znajduje się siła 20kN moment będzie liniowo malał, ponieważ skraca się długość ramienia na jakim działa siła
.")
68 Przedział 3-3 Moment w przegubie jest zawsze równy 0 (węzeł nr 1). M = 0 M X 13.33kN x 10kN m x 1 2 x = 0 M X = 13.33kN x + 5x 2 M X = 13.33kN 2m = 26.66kNm + 20kNm = 46.66kNm... Przedział 5-5 Moment na podporze jest równy 0 (węzeł nr 4). M X = 0 68

69 ... Przedział 4-4 Moment na środku pręta w3-4 będzie pochodził od składowych reakcji podporowych. M = 0 M X = V PX 1.35m + H PX 1.35m M x = 12.49kN 1.35m kN 1.35m = 8.17kNm Występuje tutaj także skok momentu o 30kNm. M X + 30kN = 38.17kN Moment w węźle nr 3 będzie pochodził od składowych reakcji podporowych na odpowiednim ramieniu oraz momentowi przyłożonemu. M 1 1 = 0 M X = 30kN + H PX 2.7m V PX 1.35m M X = 30kN kN 2.7m 12.49kN 2.7m = 46.34kN 69

70 Od węzła nr 3 momenty będą maleć do podpory, gdzie ich wartość będzie zerowa. Wykres będzie malejącą funkcją kwadratową ze względu na rodzaj obciążenia.... Rys. 11. Wykres momentów zginających 70
71 Rozdział 2. Rozwiązywanie kratownic statycznie wyznaczalnych 71
 i nie ma żadnej siły albo reakcji w węźle wtedy oba pręty są zerowe.")
72 1. Identyfikacja prętów zerowych Pręt zerowy to taki, w którym nie działąją żadne siły. Możemy spotkać trzy przypadki. Przypadek nr 1 Jeżeli mamy dwa pręty połączone węzłem (pod dowolnym kątem) i nie ma żadnej siły albo reakcji w węźle wtedy oba pręty są zerowe. Przypadek nr 2 Jeżeli mamy trzy pręty połączone w węźle i jeżeli dwa pręty są ułożone w w tej samej linii oraz żadna siła albo reakcja nie działa w tym węźle wtedy pręt trzeci (nie będący w tej samej linii) jest prętem zerowym. 72
 i węzeł")

73 Przypadek nr 3 Jeżeli mamy dwa pręty połączone węzłem (pod dowlnym kątem) i węzeł ten jest obciążony siłą, która jest w tej samej linii co pręt, wtedy drugi pręt jest zerowy. 73

74 2. Metoda równoważenia węzłów Metoda ta umożliwia obliczanie sił wewnętrzych w prętach kratownicy. Polega ona na sprawdzeniu czy sumy rzutów na os,,x oraz,,y w danym węźle bedą wynosić zero. Powiedzmy, że chcemy policzyć pręty w powyższej kratownicy. Pierwszym etapem jest policzenie reakcji podporowych. 74
75 Policzmy najpierw sumę momentów względem punktu podparcia na podporze B. M B = 0 V A 1m + 10 kn 1m = 0 V A = 10 kn Znając wartość reakcji na podporze A możemy obliczyć VB korzystając z sumy rzutów na oś,,x. P X = 0 V a V b + 10 kn = 0 ( 10kN) V b + 10 kn = 0 V b = 0 Następnie możemy skorzystać z sumy rzutów na oś,,y. P y = 0 10 kn V B = 0 V B = 10 kn Znamy zatem wszystkie reakcje podporowe. Możemy przejść do obliczania reakcji w węzłach kratownicy. Jako pierwszy rozpatrzymy węzeł podporowy A. P X = 0 V A S 1 = 0 V A = S 1 S 1 = 10 kn 75
76 P y = 0 S 2 = 0 Poznaliśmy wartości sił w dwóch pierwszych węzłach. Teraz pora na węzeł podporowy B. P X = 0 S 3 V B = 0 S 3 = 0 P y = 0 S 2 H B S 4 cos(45 ) = kN S = 0 S = 10kN S 4 = 14,08kN Została nam jeszcze do policzenia siła w pręcie górnym. 76
77 P y = 0 10 kn + S 4 cos(45 ) + S 5 = 0 10kN 14,08 0,71 + S 5 = 0 S 5 = 0 Takim własnie sposobem policzyliśmy kratownicę metodą równoważenia węzłów. Jest to podstawowa metoda analityczna do obliczania sił w prętach kratownic statycznie wyznaczalnych. 77

78 3. Metoda Rittera Metoda Rittera to kolejny sposób oblicznia sił w prętach kratownic statycznie wyznaczalnych.często jest ona używana do sprawdzenia wyników liczonych metodą równoważenia węzłów lub po prostu jako ułatwienie obliczeń. W wielu przypadkach jest ona szybsza niż metoda równoważenia węzłów. Na powyższym rysunku mamy przykład cięcia metodą Rittera przez trzy pręty kratownicy. Spróbujmy obliczyć sumę momentów względem punktów P1 i P2. M P1 = 0 S 2 1m = 0 S 2 = 0 kn M P2 = 0 S 5 1 m + V A 1 m + 10 kn 1 m = 0 S 5 = 0 kn W tym konkretnym przypadku siły w prętach są zerowe, ale nie jest to istotne. Ważne aby zauważyć i odpowiednio dobrać punkty, według których liczymy sumę momentów i zredukować ilość prętów w obliczeniach do jednej niewiadomej. Wówczas wyskorzystując tą metodę znacznie przyśpieszymy proces obliczeń. 78
79 4. Przykład nr 1: Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów, Rittera i Cremony Wszystkie obliczenia i rysunki zostały wygenerowane w programie Kratos. 1. Szkic projektu Ustalenie warunku statycznej niewyznaczalności układu Warunek konieczny geometrycznej niezmienności i statycznej wyznaczalności kratownicy o strukturze prostej: p=2w-r gdzie: p= liczba prętów kratownicy w= liczba węzłów kratownicy r= liczba stopni swobody odbieranych przez podpory Kratownica:
80 warunek: 7=7, warunek jest spełniony 3. Obliczenie kątów nachylenia prętów do osi X wariant z sin i cos Pręt Nr 2-5=45 Pręt Nr 1-2=(-45) 80
81 4. Wyznaczenie Reakcji Podporowych siły i reakcje będziemy przyjmować za dodatnie, gdy są skierowane zgodnie z układem osi XY siły i reakcje będziemy przyjmować za ujemne, gdy są skierowane niezgodnie z układem osi XY siły i reakcje będziemy rzutować na oś X i oś Y wyliczając odpowiednie składowe rzutów gdzie β to kąt zawarty pomiędzy siłą lub reakcją a osią X na podstawie tego kąta można określić zwrot siły lub reakcji... Uwalniamy daną kratownicę od więzów i wyznaczamy reakcje podporowe. Ogólne warunki równowagi... suma wszystkich momentów od składowych reakcji i obciążeń siłowych w punkcie, w którym Moment = 0 przyjmujemy punkt, w którym znajduje się podpora przegubowa, w tym punkcie Moment = 0... suma wszystkich składowych reakcji i obciążeń siłowych rzutowana na oś X... suma wszystkich składowych reakcji i obciążeń siłowych rzutowana na oś Y 81
82 5. Szkic projektu 6. Sprawdzenie Reakcji Podporowych Sprawdzenia poprawności wyznaczenia reakcji podporowych dokonamy w punkcie [(-1);(-1)] w naszym układzie XY (Punkt musi być tak dobrany, aby wszystkie siły i reakcje brały udział w obliczaniu Sumy Momentów) W punkcie tym Suma Momentów od wszystkich sił i reakcji powinna wynosić M=0 82
83 suma wszystkich momentów od składowych reakcji i obciążeń siłowych w punkcie, w którym Moment = 0 7. Sprawdzenie Reakcji Podporowych Rzut X 8. Sprawdzenie Reakcji Podporowych Rzut Y 9. Obliczenie kątów nachylenia prętów do osi X wariant z tan Xb-Xa i Yb-Ya to różnica pomiędzy współrzędnymi końca pręta Pręt Nr 0-2=0 Pręt Nr 2-3=90 Pręt Nr 1-3=0 Pręt Nr 1-0=(-90) 83
84 Pręt Nr 3-5=0 Pręt Nr 2-5=45 Pręt Nr 1-2=(-45) 10. Obliczenie sił w Prętach Aby Węzeł był w równowadze to suma jego składowych sił i reakcji rzutowana na oś X i oś Y musi być równa zero To suma sił prętowych rzutowana na oś X w Węźle. To suma reakcji podporowych rzutowana na oś X w Węźle - jeżeli jest istnieje. To suma odziaływania zewnętrznego rzutowana na oś X w Węźle - jeżeli jest przyłożona. To suma sił prętowych rzutowana na oś Y w Węźle. To suma reakcji podporowych rzutowana na oś Y w Węźle - jeżeli jest istnieje. To suma odziaływania zewnętrznego rzutowana na oś Y w Węźle - jeżeli jest przyłożona. Obliczenia rozpoczynamy od Węzła, dla którego liczba niewiadomych sił w Prętach jest najmniejsza i wynosi maksymalnie


85 Wybrano Węzeł =0 Rzutowanie na oś X Rzutowanie na oś Y Układ równań... Wybrano Węzeł =5 85

86 Rzutowanie na oś X Rzutowanie na oś Y Układ równań Wybrano Węzeł =1 Rzutowanie na oś X Rzutowanie na oś Y 86

87 Układ równań... Wybrano Węzeł =2 Rzutowanie na oś X Rzutowanie na oś Y równanie lub równanie 87
88 Szkic projektu Tabela 1 Siły Prętowe Pręt N [kn] kąt [ ] L [m] funkcja ściskany jest zerowy rozciągany jest zerowy rozciągany ściskany rozciągany 88
89 12. Obliczenie sił w Prętach Metodą Rittera Punkt Rittera jest to punkt w którym przecinają się linie działania pozostałych dwóch sił. W naszym przypadku oznaczono je żółtym prostokątem. Wyliczając Moment Statyczny w Punkcie Rittera od sił i reakcji należących do odciętej części Kratownicy redukujemy w równaniach te niewiadome siły które się przecinają, ponieważ ramię działania momentu tych sił wynosi zero. Odcięta Kratownica jest w równowadze kiedy suma jej składowych sił i reakcji rzutowana na oś X i oś Y jest równa zero gdzie: To suma sił odciętej kratownicy rzutowana na oś X. To suma reakcji podporowych odciętej kratownicy rzutowana na oś X - jeżeli reakcje należą do części. To suma odziaływania zewnętrznego odciętej kratownicy rzutowana na oś X - jeżeli siły są przyłożone do części. To suma sił prętowych odciętej kratownicy rzutowana na oś Y. To suma reakcji podporowych odciętej kratownicy rzutowana na oś Y - jeżeli reakcje należą do części. To suma odziaływania zewnętrznego odciętej kratownicy rzutowana na oś Y - jeżeli siły są przyłożone do części
90 Wybrano Przecięcie =0 W tym przypadku są dwa punkty Rittera i do policzenia sił należy rozwiązać układ równań: 1: Suma Momentu Statycznego względem punktu Rittera 2: Rzutując niewiadome siły oraz oddziaływania P na oś X 3: Rzutując niewiadome siły oddziaływania P na oś Y Oczywiste jest że wyznaczenie siły w pręcie nie przecinającym się w punkcie Rittera jest natychmiastowe ponieważ tylko ta siła tworzy równanie z jedną niewiadomą Moment względem Punktu Rittera [0;1] 90
91 Moment względem Punktu Rittera [1;0] Moment względem Punktu Rittera [0;0] Rzutowanie na oś X Rzutowanie na oś Y... 91
92 Wybrano Przecięcie =1 W tym przypadku są trzy punkty Rittera i do policzenia sił należy rozwiązać pojedyncze równanie: 1: Suma Momentu Statycznego względem punktu Rittera nr.1 2: Suma Momentu Statycznego względem punktu Rittera nr.2 3: Suma Momentu Statycznego względem punktu Rittera nr.3 Oczywiste jest że wyznaczenie siły w pręcie nie przecinającym się w punkcie Rittera jest natychmiastowe ponieważ tylko ta siła tworzy równanie z jedną niewiadomą. Wygodnie jest policzyć od razu ramię działania siły nieznanej ze wzoru na przekątną trójkąta prostokątnego. Gdzie bokami trójkąta są różnice współrzędnych X i Y pomiędzy Punktem Rittera a danym punktem siły szukanej. I jeżeli siła prętowa nie działa pod kątem prostym to cosinus kąta działania siły jest pomiędzy prętem a rzutem prostopadłym na kierunek prostej ramienia. 92
93 Oczywiście można również obliczyć moment tej siły obliczając jej składowe względem osi X i względem osi Y. Moment względem Punktu Rittera [1;1]... Moment względem Punktu Rittera [1;0]... Moment względem Punktu Rittera [2;1]... 93
94 13. Obliczenie sił w Prętach Metodą Cremony Grot wektora jest oznaczony numerem pręta, pokazane są tylko pierwsze wektory iteracji (wektor drugiej iteracji będzie miał oczywiście zwrot przeciwny do pierwszego). Obliczamy reakcje podporowe kratownicy i rysujemy wielobok sił i reakcji. Porządek rysowania przyjmujemy zgodnie z ruchem wskazówek zegara. Rys. 1. Plan Maxwell 94
95 Rys. 2. Wielobok sił i reakcji... 95

96 Wybrano Węzeł =0 96

97 Wybrano Węzeł =5 97

98 Wybrano Węzeł =
99 Rys. Wykres Cremony... Aby określić wartości sił należy porównać wykreślone wektory sił ze skalownikiem... 99

100 Rozdział 3. Charakterystyki geometryczne figur płaskich 100
101 1. Wprowadzenie do obliczeń charakterystyk figur płaskich. Główne charakterystyki pojedyńczych figur płaskich zazwyczaj zawarte są w tablicach (np. dwuteowniki, teowniki) lub obliczane są z gotowych wzorów. Zupełnie inaczej przedstawia się sytuacja, w której mamy do policzenia charakterystyki dla całego układu figur. Musimy wtedy skorzystać z wzorów i wykonać cały szerego obliczeń. Dla ułatwienia zamieszczam poniżej podstawowy tok obliczeń dla układu figur płaskich: 1. Obliczenie charakterystyk pojedyńczych figur względem osi geometrycznego środka tych figur (momenty statyczne, pole przekroju, momenty bezwładności, momenty dewiacji) 2. Przyjęcie osi początkowych układu 3. Obliczenie różnicy odległości pomiędzy osiami geometrycznego środka figur oraz przyjętymi osiami początkowymi 4. Obliczenie momentu statycznego całego układu oraz wyznaczenie osi głównych 5. Obliczenie momentów bezwładności oraz dewiacji względem osi głównych 6. Obliczenie kąta α 7. Wyznaczenie osi głównych centralnych układu oraz obliczenie wartości ekstremalych momentów bezwładności względem tych osi. Mając powyższy schemat oraz materiały pomocnicze zawarte w dalszej części tego działu znacznie łatwiej jest zrozumieć cały proces oraz obliczenia zawarte w projekcie, który możecie państwo kupić na naszej stronie. 101

102 2. Momenty statyczne figur płaskich. Momentem statycznym figury płaskiej nazywamy iloczyn pola powierzchni tej figury oraz różnicy odległości jej środka geometrycnego i osi, względem której jest liczony. Sx i = A i y i Sy i = A i x i Moment statyczny może przyjmować wartość ujemną. Jest wyrażany w jednostach długości do trzeciej potęgi (m 3, cm 3 itd.) Jeżeli suma cząstkowych momentów statycznych jest równa zero to oś, względem której jest liczony, stanowi geometryczny środek figury. Środek geometryczny możemy obliczyć korzystając z poniższych wzorów: x c = Sy i A i y c = Sx i A i = A ix i A i = A iy i A i = A 1 x 1 + A 2 x 2 + A 3 x A n x n A 1 + A 2 + A A n = A 1 y 1 + A 2 y 2 + A 3 y A n y n A 1 + A 2 + A A n Załóżmy zatem, że chcemy się dowiedzieć gdzie jest geometryczny środek poniższego układu figur. Najpierw musimy policzyć moment statyczny względem osi, które możemy dobrać wedle upodobania oraz pole całkowite wszystkich figur. 102
 = 18 cm3 2 Teraz obliczmy niezbędne charakterystyki figury po lewej stronie.")
103 Zajmijmy się najpierw figurą po prawej stronie. A 1 = a b = 2 cm 3 cm = 6 cm 2 Sx 1 = A 1 y 1 = 6 cm 2 3 cm 1 2 = 9 cm3 Sy 1 = A 1 x 1 = 6 cm 2 (2 cm + 2 cm 1 ) = 18 cm3 2 Teraz obliczmy niezbędne charakterystyki figury po lewej stronie. A 2 = a b = 2 cm 3 cm = 6 cm 2 Sx 2 = A 2 y 2 = 6 cm 2 3 cm 1 2 = 9 cm3 Sy 2 = A 2 x 2 = 6 cm 2 2 cm 1 2 = 6 cm3 Mając powyższe dane możemy obliczyć geometryczny środek układu figur płaskich. x c = Sy i = Sy 1 + Sy 2 = 18 cm3 + 6 cm 3 24 cm3 A i A 1 + A 2 6 cm 2 = + 6 cm2 12 cm 2 = 2 cm y c = Sx i A i = Sx 1 + Sx 2 = 9 cm3 + 9 cm 3 18 cm3 A 1 + A 2 6 cm 2 = = 1,5 cm + 6 cm2 12 cm2 103
104 Obliczyliśmy w końcu współrzędne środka geometrycznego układu. Pora nanieść to na nasz rysunek. 104
105 3. Momenty bezwładności figur płaskich Momentem bezwładności figury płaskiej nazywamy iloczyn jej pola oraz kwadratu odległości od osi, względem której jest on liczony. Momenty bezwładności zazwyczaj jest wyrażany w jednostkach długości do czwartej potęgi m 4 (m 4, cm 4 itd.). Im większy moment bezwładności względem danej osi, tym przekrój jest sztywniejszy, a co za tym idzie, ugięcie powstałe w wyniku przyłozenia siły będzie mniejsze. Spójrzmy na powyższy rysunek. Wyobraźmy sobie, że jest to przekrój poprzeczny belki. Naszym zadaniem jest sprawdzić w jakiej pozycji ją ustawić, aby ugięcie po obciążeniu było najmniejsze. Musimy zatem obliczyć momenty bezwładności tego przekroju względem każdej z osi znajdujących się w centrum figury. 105



106 W tabeli poniżej przedstawiono parametry geometryczne najczęściej spotykanych figur płaskich. Figura Jxi Jyi Dxyi b h 3 12 b 3 h 12 0 b h 3 36 b 3 h 36 ± b2 h 2 72 π r 4 4 π r r r 4 r 4 8 4r4 9π = = r 4 106

107 0.1098r 4 π r b h3 J x = 12 = 2 cm 3 cm3 12 = 4,5 cm 4 J y = h b3 12 = 3 cm 2 cm3 12 = 2 cm 4 Wzory na pola figur płaskich możemy znaleźć w tablicach inżynierskich. W przypadku kształtowników tablice często sporządza sam producent. J x = 4.5 cm 4 > J y = 2 cm 4 Wynika z tego, że belkę najlepiej ustawić w pozycji, w której siła jest prostopadła do osi,,x. Dokładnie jak na rysunku poniżej. 107

108 4. Momenty dewiacji oraz główne centralne momenty bezwładności Moment dewiacji informuje nas o stopniu rozproszenia pola między osiami. Mogą przyjmować zarówno wartości dodatnie jak i ujmne. Obliczamy go ze wzoru: D xy = D xnyn + A n x y Gdzie : Dxy moment dewiacji układu figur płaskich Dxnyn moment dewiacji pojedyńczej figury An pole pojedynczej figury x różnica odległości pomiędzy osią,,x środka geometrycznego figury oraz osią, względem której liczymy charakterystyki y różnica odległości pomiędzy osią,,y środka geometrycznego figury oraz osią, względem której liczymy charakterystyki O tym, czy moment dewiacji będzie dodatni czy ujemny decyduje przewaga pola figury znajdującej się na dodatnich lub ujemnych ćwiartkach układu współrzędnych. Poniższy rysunek ilustruje rozkład pola względem osi układu. Zazwyczaj patrząc na rysunek możemy określić, czy większa część pola znajduje się w ćwiartkach ujemnych lub dodatnich. Jeżeli mamy wątpliwości 108
109 należy podzielić figurę na mniejsze części i obliczyć różnicę pól dodatnich i ujemnych. Główne centralne osie bezwładności to te, względem których suma momentów dewiacji jest równa zero, a momenty bezwładności osiagają wartości ekstremalne. Są to osie głowne obrócone o kąt alfa. tg2α = 2D xy J y J x Gdzie : Dxy moment dewiacji układu figur płaskich Jy moment bezwładności względem osi,,y układu figur płaskich Jx moment bezwładności względem osi,,x układu figur płaskich Wartości ekstremalne momentów bezwładności w tym układzie przyjmą wartości: J max = J x + J y 2 J min = J x + J y 2 Gdzie: + ( J 2 x J y 2 ) + D 2 xy ( J 2 x J y 2 ) + D 2 xy Jmax wartość maksymalna momentu bezwładności układu Jmin wartość minimalna momentu bezwładności układu Dxy moment dewiacji układu figur płaskich Jy moment bezwładności względem osi,,y układu figur płaskich Jx moment bezwładności względem osi,,x układu figur płaskich 109

110 5. Twierdzenie Steinera gruparectan.pl Twierdzenie Steinera wykorzystywane jest do obliczania momentów bezwładności układów figur płaskich lub pojedyńczych figur względem osi nie będącej geometrycznym środkiem. Aby obliczyć momenty bezwładności względem takiej osi możemy wykorzystać poniższe wzory. J x = J xn + A y 2 J y = J yn + A x 2 Gdzie: Jx, Jy całkowity moment bezwładności względem osi,,x lub,,y Jxn, Jyn moment bezwładności pojedyńczej figury względem osi jej geometrycznego środka A pole figury płaskiej x, y różnica odległości pomiędzy osiami znajdującymi się w geometrycznym środku figury oraz osiami, względem których obliczamy moment bezwładności. Postarajmy się obliczyć moment bezwładności kwadratu względem dowolnej osi. Najpierw policzmy moment bezwładności kwadratu względem jego geometrycznego środka. Dla większości figur płaskich wzory można znaleźć w tablicach inżynierskich. Jx 1 = h4 12 = 14 = m
111 Jy 1 = h4 12 = 14 = m4 12 Gdzie : h długość boku kwadratu Teraz musimy policzyć pole kwadratu: A = h 2 A = 1 m 2 oraz odległości Δx 2, Δy 2 będace różnicą odległości między osiami x1 i X oraz y1 i Y: Δx 2 = 1,5 m + 0,5 1 m = 1.75 m Δy 2 = 1,5 m + 0,5 1 m = 1.75 m Mając wszystkie potrzebne dane możemy zatem obliczyć potrzebne nam momenty bezwładności. J x = J xn + A y 2 = m m 2 (1.75 m) 2 = 3,146 m 4 J y = J yn + A x 2 = m m 2 (1.75 m) 2 = 3,146 m 4 111
 A i [cm 4 ] - pole powierzchni figury i x i [cm] - współrzędna X środka ciężkości figury i w układzie globalnym y i [cm] - współrzędna Y środka ciężkości figury i w układzie globalnym S i = (x")
112 6. Przykład nr 1: Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności 1. Schemat zadania Rys Schemat zadania dla przykładu nr 1 Oznaczenia: i nr figury, gdzie i = (1,2,3,...,n) A i [cm 4 ] - pole powierzchni figury i x i [cm] - współrzędna X środka ciężkości figury i w układzie globalnym y i [cm] - współrzędna Y środka ciężkości figury i w układzie globalnym S i = (x i, y i ) współrzędne środka ciężkości figury i Sy i = A i x i [cm 3 ] - moment statyczny względem osi Y w układzie globalnym Sx i = A i y i [cm 3 ] - moment statyczny względem osi X w układzie globalnym x c [cm] - współrzędna X środka ciężkości układu figur (figury całkowitej) w układzie globalnym y c [cm] - współrzędna Y środka ciężkości układu figur (figury całkowitej) w układzie globalnym x ci [cm] - odległość X pomiędzy środkiem ciężkości figury i a środkiem ciężkości całego układu 112
![y ci [cm] - odległość Y pomiędzy środkiem ciężkości figury i a środkiem ciężkości całego układu Jx i [cm 4 ] - moment bezwładności figury i względem osi X Jy i [cm 4 ] - moment bezwładności figury i](/docs-images/93/114452721/images/113-0.jpg "względem osi Y Dxy i [cm 4 ] - dewiacyjny moment bezwładności figury i 2 A i x ci [cm 4 ] - element do wzoru Steinera 2 A i y ci [cm 4 ] - element do wzoru Steinera A i x ci y ci [cm 4 ] - element do")
![wzoru Steinera [... tablice] lub Red Book - wartość odczytana z Tablic Inżynierskich.](/docs-images/93/114452721/images/113-2.jpg ".. Transformacja Kątowa : współrzędne X i Y obliczamy ze wzorów na obrót układu: gdzie X i Y to punkt po transformacji kątowej a X' i Y' punkt przed transformacją kątową gdzie φ to kąt obrotu figury")
113 y ci [cm] - odległość Y pomiędzy środkiem ciężkości figury i a środkiem ciężkości całego układu Jx i [cm 4 ] - moment bezwładności figury i względem osi X Jy i [cm 4 ] - moment bezwładności figury i względem osi Y Dxy i [cm 4 ] - dewiacyjny moment bezwładności figury i 2 A i x ci [cm 4 ] - element do wzoru Steinera 2 A i y ci [cm 4 ] - element do wzoru Steinera A i x ci y ci [cm 4 ] - element do wzoru Steinera [... tablice] lub Red Book - wartość odczytana z Tablic Inżynierskich... Transformacja Kątowa : współrzędne X i Y obliczamy ze wzorów na obrót układu: gdzie X i Y to punkt po transformacji kątowej a X' i Y' punkt przed transformacją kątową gdzie φ to kąt obrotu figury układ X'Y' względem układu XY - jeżeli jest on zgodny z ruchem wskazówek zegara to jest on ujemny... Transformacja Liniowa : współrzędne xi i yi obliczamy ze wzorów na przesunięcie układu: gdzie dx i dy to współrzędne początku figury w nowym położeniu x i = dx + x y i = dy + y Charakterystyki geometryczne poszczególnych figur układu 2.1. Figura nr 1 prostokąt b=2[cm] h=3[cm] Figura wejściowa Figura po transformacji S 1 = (x 1, y 1 ) S 1 = (x 1, y 1 ) x 1 = 1[cm] x 1 = 1[cm] y 1 = 1.5[cm] y 2 = 1.5[cm] kąt OX: 0 [stopnie] transformacja liniowa figury do punktu docelowego o wektor dx i dy dx = 0[cm] dy = 0[cm] 113
![x 1 = 0 + b 2 = 0 + 2 cm 2 = 1 [cm] y 1 = 0 + h 2 = 0 + 3 cm = 1.5 [cm] 2 A 1 = b h = 2 cm 3 cm = 6 [cm] 2 S 1 = (x 1 ; y 1 ) Sx 1 = A 1 y 1 = 6 cm 2 1.](/docs-images/93/114452721/images/114-0.jpg "5 cm = 9 [cm] 3 Sy 1 = A 1 x 1 = 6 cm 2")
![1 cm = 6 [cm] 3 b h3 Jx 1 = 12](/docs-images/93/114452721/images/114-1.jpg "= 2 33 54 cm4 = = 4.5 [cm] 4 12 12 Jy 1 = b3 h 12 = 23 3 24 cm4 = = 2 [cm] 4 12 12 Dxy 1 = 0 2.2. Figura nr 2 trójkąt b=3[cm] h=3[cm] Figura wejściowa S 2 = (x 2, y 2 ) x 2 = 1[cm] y 2 = 1[cm] Figura")
114 x 1 = 0 + b 2 = cm 2 = 1 [cm] y 1 = 0 + h 2 = cm = 1.5 [cm] 2 A 1 = b h = 2 cm 3 cm = 6 [cm] 2 S 1 = (x 1 ; y 1 ) Sx 1 = A 1 y 1 = 6 cm cm = 9 [cm] 3 Sy 1 = A 1 x 1 = 6 cm 2 1 cm = 6 [cm] 3 b h3 Jx 1 = 12 = cm4 = = 4.5 [cm] Jy 1 = b3 h 12 = cm4 = = 2 [cm] Dxy 1 = Figura nr 2 trójkąt b=3[cm] h=3[cm] Figura wejściowa S 2 = (x 2, y 2 ) x 2 = 1[cm] y 2 = 1[cm] Figura po transformacji S 2 = (x 2, y 2 ) x 2 = 3[cm] y 2 = 1[cm] kąt OX: 0 [stopnie] transformacja liniowa figury do punktu docelowego o wektor dx i dy dx = 2[cm] dy = 0[cm] x 2 = 2cm + b 3 y 2 = 0 + h 3 = cm 3 = 1 [cm] = 2cm + 3 cm 3 = 3 [cm] A 2 = 1 2 b h = 1 3 cm 3 cm = 4.5 [cm]2 2 S 2 = (x 2 ; y 2 ) Sx 2 = A 2 y 2 = 4.5 cm 2 1 cm = 4.5 [cm] 3 Sy 2 = A 2 x 2 = 4.5 cm 2 3 cm = 13.5 [cm] 3 b h3 Jx 2 = 36 = cm4 = = 2.25 [cm] Jy 2 = b3 h 36 = cm4 = = 2.25 [cm]
![Dxy 2 = b2 h 2 72 = 32 3 2 72 = 81 cm4 72 = 1,125 [cm] 4 Rys. 3.1.2.Środki ciężkości poszczególnych figur 3.](/docs-images/93/114452721/images/115-0.jpg "Położenie głównych centralnych osi bezwładności (xc, yc) względem układu XY Dla ułatwienia obliczeń zestwiamy wszystkie dane w formie tabelarycznej: Fig.")
115 Dxy 2 = b2 h 2 72 = = 81 cm4 72 = 1,125 [cm] 4 Rys Środki ciężkości poszczególnych figur 3. Położenie głównych centralnych osi bezwładności (xc, yc) względem układu XY Dla ułatwienia obliczeń zestwiamy wszystkie dane w formie tabelarycznej: Fig. i Ai [cm 2 ] xi [cm] yi [cm] Syi=Ai*xi [cm 3 ] Sxi=Ai*yi [cm 3 ] Mając powyższe dane możemy obliczyć geometryczny środek układu figur płaskich. x c = Sy i = Sy 1 + Sy 2 = 6 cm cm cm3 A i A 1 + A 2 6 cm 2 = [cm] cm cm2 y c = Sx i A i = Sx 1 + Sx 2 = 9 cm cm cm3 A 1 + A 2 6 cm 2 = 1,2857 [cm] cm cm2 115
![Rys. 3.1.3.Główne centralne osie bezwładności 4. Odległości od środka ciężkości figury do środka ciężkości układu x ci = x i x c y ci = y i y c 4.1. Figura prostokąt b=2[cm] h=3[cm] x c1 = x 1 x c = 1 cm 1.](/docs-images/93/114452721/images/116-0.jpg "8571 cm = 0,8571 cm y c1 = y 1 y c = 1.5 cm 1.2857 cm = 0.2143 cm 4.2. Figura trójkąt b=3[cm] h=3[cm] x c2 = x 2 x c = 3 cm 1.8571 cm = 1.1429 cm y c2 = y 2 y c = 1 cm 1.2857 cm = 0.2857 cm Rys. 3.1.4.Odległości środków ciężkości poszczególnych figur do środka ciężkości układu 116")
116 Rys Główne centralne osie bezwładności 4. Odległości od środka ciężkości figury do środka ciężkości układu x ci = x i x c y ci = y i y c 4.1. Figura prostokąt b=2[cm] h=3[cm] x c1 = x 1 x c = 1 cm cm = 0,8571 cm y c1 = y 1 y c = 1.5 cm cm = cm 4.2. Figura trójkąt b=3[cm] h=3[cm] x c2 = x 2 x c = 3 cm cm = cm y c2 = y 2 y c = 1 cm cm = cm Rys Odległości środków ciężkości poszczególnych figur do środka ciężkości układu 116
117 5. Centralne momenty bezwładności dla układu XcYc względem ciężkości osi centralnych Ponownie dla ułatwienia obliczeń zestwiamy wszystkie dane w formie tabelarycznej: Fig i Ai [cm 2 ] xci [cm] yci [cm] Jxi [cm 4 ] Jyi [cm 4 ] Dxyi [cm 4 ] Aixci 2 [cm 4 ] Aiyci 2 [cm 4 ] Aixciyci[cm 4 ] Sumy częściowe Jxi, Jyi, Dxyi Jx i = 6.75 [cm 4 ] Jy i = 4.25 [cm 4 ] Dxy i = [cm 4 ] Elementy do wzoru Steinera: A i x 2 ci = [cm 4 ] A i y 2 ci = [cm 4 ] A i x ci y ci = [cm 4 ] 6. Jxc, Jyc, Dxyc całego układu zgodnie z twierdzeniem Steinera Jx c = Jx i + A i y 2 ci = = [cm 4 ] Jy c = Jy i + A i x 2 ci = = [cm 4 ] Dxy c = Dxy i + A i x ci y ci = = [cm 4 ] to są Centralne Momenty Bezwładności układu figur 7. Kąt alfa głównych centralnych osi bezwładności tan2α gł = 2Dxy c = 2 ( ) Jy c Jx c = = α gł = arctan(tan2α gł ) = arctan( 1.035) = α gł =
[cm 4 ] 2 + ( 3.6964) 2 = 8.2. Jmin J max = Jy c + Jx c 2 = 14.5357 + 7.3929 2 ( Jy 2 c Jx c ) + Dxy 2 2 c = 14.5357 7.")
118 Rys Kąt alfa I rysunek końcowy 8. Główne centralne momenty bezwładności 8.1. Jmax J max = Jy c + Jx c 2 = ( Jy 2 c Jx c ) + Dxy 2 2 c = ( ) 2 = = = = J max = [cm 4 ] (J I )[cm 4 ] 2 + ( ) 2 = 8.2. Jmin J max = Jy c + Jx c 2 = ( Jy 2 c Jx c ) + Dxy 2 2 c = ( ) 2 = = = = 2 + ( 3,6964) 2 = 118
119 J max = [cm 4 ] (J II )[cm 4 ] 9. Sprawdzenie 9.1. Niezmiennik J1 δj 1 = (Jy c + Jx c ) (J max + J min ) = 0 (Jy c + Jx c ) = = (J max + J min ) = = δj 1 = = Niezmiennik J2 δj 2 = (Jy c Jx c Dxy c 2 ) (J max J min ) = 0 (Jy c Jx c Dxy c 2 ) = = (J max J min ) = = δj 2 = = Momenty bezwładności dla naszego układu XY w punkcie [0,0] Jx [0,0] = Jx c + A i y c 2 = = [cm 4 ] Jy [0,0] = Jy c + A i x c 2 = = [cm 4 ] Dxy [0,0] = Dxy c + A i x c y c = Dxy [0,0] = = [cm 4 ] 119
120 7. Przykład nr 2: Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności 1. Schemat układu Rys Schemat układu dla przykładu nr 2... Oznaczenia: i nr figury, gdzie i = (1,2,3,...,n) A i [cm 4 ] - pole powierzchni figury i x i [cm] - współrzędna X środka ciężkości figury i w układzie globalnym y i [cm] - współrzędna Y środka ciężkości figury i w układzie globalnym S i = (x i, y i ) współrzędne środka ciężkości figury i Sy i = A i x i [cm 3 ] - moment statyczny względem osi Y w układzie globalnym Sx i = A i y i [cm 3 ] - moment statyczny względem osi X w układzie globalnym x c [cm] - współrzędna X środka ciężkości układu figur (figury całkowitej) w układzie globalnym y c [cm] - współrzędna Y środka ciężkości układu figur (figury całkowitej) w układzie globalnym 120
121 x ci [cm] - odległość X pomiędzy środkiem ciężkości figury i a środkiem ciężkości całego układu y ci [cm] - odległość Y pomiędzy środkiem ciężkości figury i a środkiem ciężkości całego układu Jx i [cm 4 ] - moment bezwładności figury i względem osi X Jy i [cm 4 ] - moment bezwładności figury i względem osi Y Dxy i [cm 4 ] - dewiacyjny moment bezwładności figury i 2 A i x ci [cm 4 ] - element do wzoru Steinera A i y 2 ci [cm 4 ] - element do wzoru Steinera A i x ci y ci [cm 4 ] - element do wzoru Steinera [... tablice] lub Red Book - wartość odczytana z Tablic Inżynierskich... Transformacja Kątowa : współrzędne X i Y obliczamy ze wzorów na obrót układu: gdzie X i Y to punkt po transformacji kątowej a X' i Y' punkt przed transformacją kątową gdzie φ to kąt obrotu figury układ X'Y' względem układu XY - jeżeli jest on zgodny z ruchem wskazówek zegara to jest on ujemny... Transformacja Liniowa : współrzędne xi i yi obliczamy ze wzorów na przesunięcie układu: gdzie dx i dy to współrzędne początku figury w nowym położeniu x i = dx + x y i = dy + y Charakterystyki geometryczne poszczególnych figur układu Obliczenie nowych wartości środka ciężkości figury po obrocie o kąt i przesunięciu do punktu docelowego. Figura znajduje się teraz w takim położeniu jak wzory podane na obliczanie momentów. Układ taki nazywamy układem lokalnym figury. 2.1.Figura Prostokąt b=11[cm] h=6[cm] Figura wejściowa S 1 = (x 1, y 1 ) x 1 = 5.5[cm] y 1 = 3[cm] Figura po transformacji S 1 = (x 1, y 1 ) x 1 = 10.5[cm] y 2 = 7[cm] 121
![kąt OX: 0 [stopnie] transformacja liniowa figury do punktu docelowego o wektor dx i dy dx = 5[cm] dy = 10[cm] x 1 = 5 + 5.5 = 10.](/docs-images/93/114452721/images/122-0.jpg "5[cm] y 1 = 10 + ( 3) = 7[cm] Wartości Jx 1, Jy 1, Dxy 1 w układzie x 1 y 1 bez obrotu figury b = 11[cm] h = 6[cm] A 1 = b h = 66[cm 2 ] b h3 11 63 Jx 1 =")

![.. 2.2.Figura ćwiartka koła r=4[cm] Figura wejściowa S 2 = (x 2, y 2 ) x 2 = 1.6977[cm] y 2 = 1.6977[cm] Figura po transformacji S 2 = (x 2, y 2 ) x 2 = 6.](/docs-images/93/114452721/images/122-2.jpg "6977[cm] y 2 = 5.6977[cm] kąt OX: 0 [stopnie] transformacja liniowa figury do punktu docelowego o wektor dx i dy 122")
122 kąt OX: 0 [stopnie] transformacja liniowa figury do punktu docelowego o wektor dx i dy dx = 5[cm] dy = 10[cm] x 1 = = 10.5[cm] y 1 = 10 + ( 3) = 7[cm] Wartości Jx 1, Jy 1, Dxy 1 w układzie x 1 y 1 bez obrotu figury b = 11[cm] h = 6[cm] A 1 = b h = 66[cm 2 ] b h Jx 1 = = = 198 cm Jy 1 = h b3 12 = = 665,5 cm 4 12 Dxy 1 = 0 cm Układ nachylony nie występuje kąt nachylenia jest równy zero względem naszego układu XY Jx 1 = 198 cm 4 Jy 1 = 665,5 cm 4 Dxy 1 = 0 cm Ocena czy figura podana została jako ujemna pole dodatnie: figura została podana jako dodatnia wartości: Jxi, Jyi, Dxyi zostaną przy swoich znakach Figura ćwiartka koła r=4[cm] Figura wejściowa S 2 = (x 2, y 2 ) x 2 = [cm] y 2 = [cm] Figura po transformacji S 2 = (x 2, y 2 ) x 2 = [cm] y 2 = [cm] kąt OX: 0 [stopnie] transformacja liniowa figury do punktu docelowego o wektor dx i dy 122
![dx = 5[cm] dy = 4[cm] e = 4r = 1.6977 cm 3π x 2 = 5 + 1.6977 = 6.6977[cm] y 2 = 4 + 1.6977 = 5.](/docs-images/93/114452721/images/123-1.jpg "6977[cm] Wartości Jx 2, Jy 2, Dxy 2 w układzie x 2 y 2 bez obrotu figury A 2 = πr2 π 42 = = 4π = 12.5664 [cm 2 ] 4 4 Jx 2 = r 4 ( π 4 ) = 14.")
![0489 16 9π [cm4 ] Jy 2 = r 4 ( π 16 4 9π ) = 14.0489 [cm4 ] Dxy 2 = r4 8 4 r4 9π = 4.2166 [cm4 ] 2.2.1. Układ nachylony nie występuje kąt nachylenia jest równy zero względem naszego układu XY Jx 2 = 14.](/docs-images/93/114452721/images/123-2.jpg "0489 [cm 4 ] Jy 2 = 14.0489 [cm 4 ] Dxy 2 = 4.")
![2166 [cm 4 ] pole ujemne: figura została podana jako ujemna wartość: A - pole powierzchni zostało zmienione na ujemne A 2 = 12.5664 [cm 2 ]... 2.3.](/docs-images/93/114452721/images/123-3.jpg "Figura Dwuteownik 120 INP Figura wejściowa S 3 = (x 3, y 3 ) x 3 = 2.9[cm] y 3 = 6[cm] Figura po transformacji S 3 = (x 3, y 3 ) x 3 = 4.")
123 dx = 5[cm] dy = 4[cm] e = 4r = cm 3π x 2 = = [cm] y 2 = = [cm] Wartości Jx 2, Jy 2, Dxy 2 w układzie x 2 y 2 bez obrotu figury A 2 = πr2 π 42 = = 4π = [cm 2 ] 4 4 Jx 2 = r 4 ( π 4 ) = π [cm4 ] Jy 2 = r 4 ( π π ) = [cm4 ] Dxy 2 = r4 8 4 r4 9π = [cm4 ] Układ nachylony nie występuje kąt nachylenia jest równy zero względem naszego układu XY Jx 2 = [cm 4 ] Jy 2 = [cm 4 ] Dxy 2 = [cm 4 ] pole ujemne: figura została podana jako ujemna wartość: A - pole powierzchni zostało zmienione na ujemne A 2 = [cm 2 ] Figura Dwuteownik 120 INP Figura wejściowa S 3 = (x 3, y 3 ) x 3 = 2.9[cm] y 3 = 6[cm] Figura po transformacji S 3 = (x 3, y 3 ) x 3 = [cm] y 3 = [cm] kąt OX: [stopnie] Transformacja kątowa : figury w układzie lokalnym o kąt 123
124 ... transformacja liniowa figury do punktu docelowego o wektor dx i dy x 3 = ( ) = [cm] y 3 = ( ) = [cm] Wartości Jx 3, Jy 3, Dxy 3 w układzie x 3 y 3 bez obrotu figury s = 5.8 [cm] h = 12 [cm] A 3 = 14.2 [cm 2 ] Jx 3 = 328 [cm 4 ] Jy 3 = 21.5 [cm 4 ] Dxy 3 = 0 [cm 4 ] Momenty i dewiacje dla układu nachylonego względem naszego układu XY (ponieważ kąt nachylenia analizowanej figury jest różny od zera i wynosi jak poniżej to należy obliczyć układ nachylony ) = Momenty wejściowe do obliczenia układu nachylonego Jx 3 = 328 [cm 4 ] Jy 3 = 21.5 [cm 4 ] Dxy 3 = 0 [cm 4 ] Jx 3 w układzie nachylonym Jx 3 = Jx 3 + Jy Jx 3 Jy 3 2 cos(2α) Dxy 3 sin(2α) = 124
125 ,5 = 2 = ,5 2 gruparectan.pl cos(2 ( )) 0 sin(2 ( )) = cos( ) 0 sin( ) 2 2 = ( ) = = = cm Jy 3 w układzie nachylonym Jy 3 = Jx 3 + Jy 3 Jx 3 Jy 3 cos(2α) Dxy sin(2α) = = cos(2 ( )) 0 sin(2 ( )) = 2 2 = cos( ) 0 sin( ) = 2 2 = ( ) = = = cm Dxy 3 w układzie nachylonym Dxy 3 = Jx 3 Jy 3 sin(2α) + Dxy 2 3 cos(2α) = = sin(2 ( )) + 0 cos(2 ( )) = 2 = sin( ) = 2 = ( ) = = [cm 4 ] Ocena czy figura podana została jako ujemna pole dodatnie: figura została podana jako dodatnia wartości: Jx 3, Jy 3, Dxy 3 zostaną przy swoich znakach

126 Rys Środki ciężkości figur w układzie 3. Położenie głównych centralnych osi bezwładności (x c, y c ) względem układu XY Tabela Środki ciężkości Figur Fig. x i [cm] y i [cm] A i [cm 2 ] A i x i [cm 3 ] A i y i [cm 3 ] Sumy A i = [cm 2 ] A i x i = [cm 3 ] A i y i = [cm 3 ] S C = (x c, y c ) x c = A ix i = = [cm] A i
127 y c = A iy i = = [cm] A i gruparectan.pl Rys Główne centralne osi bezwładności 4. Odległości od środka ciężkości figury do środka ciężkości układu x ci = x i x c y ci = y i y c 4.1. Figura Prostokąt b=11[cm] h=6[cm] x c1 = x 1 x c = = [cm] y c1 = y 1 y c = = [cm] 4.2. Figura ćwiartka koła r=4[cm] x c2 = x 2 x c = = [cm] y c2 = y 2 y c = = [cm] 127
![4.3. Figura Dwuteownik 120 INP x c3 = x 3 x c = 4.8099 10.0118 = 5.2019 [cm] y c3 = y 3 y c = 1.3386 6.0533 = 4.7147 [cm] Rys. 3.2.4. Odległości środków ciężkości poszczególnych figur do środka ciężkości układu 5.](/docs-images/93/114452721/images/128-0.jpg "Centralne Momenty bezwładności dla układu x c y c względem środka ciężkości Osi Centralnych Tabela Momenty i Dewiacje Fig.")
128 4.3. Figura Dwuteownik 120 INP x c3 = x 3 x c = = [cm] y c3 = y 3 y c = = [cm] Rys Odległości środków ciężkości poszczególnych figur do środka ciężkości układu 5. Centralne Momenty bezwładności dla układu x c y c względem środka ciężkości Osi Centralnych Tabela Momenty i Dewiacje Fig. x ci [cm] y ci [cm] Jx i [cm 4 ] Jy i [cm 4 ] Dxy i [cm 4 ] A i x 2 ci [cm 4 ] A i y 2 ci [cm 4 ] A i x ci y ci [cm 4 ] Sumy Sumy częściowe Jxi, Jyi, Dxyi Jx i = [cm 4 ] Jy i = [cm 4 ] Dxy i = [cm 4 ] 128
129 Elementy do wzoru Steinera: A i x 2 ci = [cm 4 ] A i y 2 ci = [cm 4 ] A i x ci y ci = [cm 4 ] 6. Jxc, Jyc, Dxyc całego układu zgodnie z twierdzeniem Steinera Jx c = Jx i + A i y 2 ci = = [cm 4 ] Jy c = Jy i + A i x 2 ci = = [cm 4 ] Dxy c = Dxy i + A i x ci y ci = = [cm 4 ] to są Centralne Momenty Bezwładności układu figur 7. Kąt alfa Głównych Centralnych osi bezwładności tan2α gł = 2Dxy c = Jy c Jx c = = α gł = arctan (tan2α gł ) = arctan (3.3283) = α gł = α gł 2 =
 + Dxy 2 2 c = 986.2595 833.8051 + ( ) 2 = 910.0323 + 76.2272 2 + 253.708 2 = = 910.0323 + 70178.3139 = 910.0323 + 264.9119 = J max = 1174.")
130 Rys Kąt alfa, rysunek końcowy 8. Główne Centralne momenty bezwładności 8.1. Jmax J max = Jy c + Jx c 2 = ( Jy 2 c Jx c ) + Dxy 2 2 c = ( ) 2 = = = = = J max = [cm 4 ] (J I )[cm 4 ] = 130
Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów
 1. Kratownica Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów 2. Szkic projektu rysunek jest w skali True 3. Ustalenie warunku statycznej niewyznaczalności układu Warunek
1. Kratownica Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów 2. Szkic projektu rysunek jest w skali True 3. Ustalenie warunku statycznej niewyznaczalności układu Warunek
1. Silos Strona:1 Dla danego układu wyznaczyć MTN metodą sił Rys. Schemat układu ...
 1. Silos Dla danego układu wyznaczyć MTN metodą sił Rys. Schemat układu... Przyjęto przekrój podstawowy: I= 3060[cm4] E= 205[GPa] Globalne EI= 6273[kNm²] Globalne EA= 809750[kN] Strona:1 2. Ustalenie stopnia
1. Silos Dla danego układu wyznaczyć MTN metodą sił Rys. Schemat układu... Przyjęto przekrój podstawowy: I= 3060[cm4] E= 205[GPa] Globalne EI= 6273[kNm²] Globalne EA= 809750[kN] Strona:1 2. Ustalenie stopnia
Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1. MECHANIKA OGÓLNA - lista zadań 2016/17
 Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1 MECHANIKA OGÓLNA - lista zadań 2016/17 Część 1 analiza kinematyczna układów płaskich Przeprowadzić analizę kinematyczną układu. Odpowiednią
Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1 MECHANIKA OGÓLNA - lista zadań 2016/17 Część 1 analiza kinematyczna układów płaskich Przeprowadzić analizę kinematyczną układu. Odpowiednią
gruparectan.pl 1. Szkic projektu Strona:1
 Zadanie: Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności 1. Szkic projektu * Rozwiązanie zadania * Oznaczenia: A [cm²] - pole powierzchni figury
Zadanie: Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności 1. Szkic projektu * Rozwiązanie zadania * Oznaczenia: A [cm²] - pole powierzchni figury
rectan.co.uk 1. Szkic projektu Strona:1
 Zadanie: Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności 1. Szkic projektu * Rozwiązanie zadania * Oznaczenia: A [cm²] - pole powierzchni figury
Zadanie: Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności 1. Szkic projektu * Rozwiązanie zadania * Oznaczenia: A [cm²] - pole powierzchni figury
gruparectan.pl 1. Silos 2. Ustalenie stopnia statycznej niewyznaczalności układu SSN Strona:1 Dla danego układu wyznaczyć MTN metodą sił
 1. Silos Dla danego układu wyznaczyć MTN metodą sił Rys. Schemat układu Przyjęto przekrój podstawowy: I= 3060[cm4] E= 205[GPa] Globalne EI= 6273[kNm²] Globalne EA= 809750[kN] 2. Ustalenie stopnia statycznej
1. Silos Dla danego układu wyznaczyć MTN metodą sił Rys. Schemat układu Przyjęto przekrój podstawowy: I= 3060[cm4] E= 205[GPa] Globalne EI= 6273[kNm²] Globalne EA= 809750[kN] 2. Ustalenie stopnia statycznej
Zadanie : Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności Strona :1
 Zadanie : Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności * Rozwiązanie zadania * Oznaczenia : A [cm²] - pole powierzchni figury Xo [cm] - współrzędna
Zadanie : Wyznaczyć położenie głównych centralnych osi bezwładności i obliczyć główne centralne momenty bezwładności * Rozwiązanie zadania * Oznaczenia : A [cm²] - pole powierzchni figury Xo [cm] - współrzędna
5.1. Kratownice płaskie
 .. Kratownice płaskie... Definicja kratownicy płaskiej Kratownica płaska jest to układ prętowy złożony z prętów prostych, które są połączone między sobą za pomocą przegubów, Nazywamy je węzłami kratownicy.
.. Kratownice płaskie... Definicja kratownicy płaskiej Kratownica płaska jest to układ prętowy złożony z prętów prostych, które są połączone między sobą za pomocą przegubów, Nazywamy je węzłami kratownicy.
gruparectan.pl 1. Metor Strona:1 Dla danego układu wyznaczyć MTN metodą przemieszczeń Rys. Schemat układu Współrzędne węzłów:
 1. Metor Dla danego układu wyznaczyć MTN metodą przemieszczeń Rys. Schemat układu Współrzędne węzłów: węzeł 1 x=[0.000][m], y=[0.000][m] węzeł 2 x=[2.000][m], y=[0.000][m] węzeł 3 x=[2.000][m], y=[2.000][m]
1. Metor Dla danego układu wyznaczyć MTN metodą przemieszczeń Rys. Schemat układu Współrzędne węzłów: węzeł 1 x=[0.000][m], y=[0.000][m] węzeł 2 x=[2.000][m], y=[0.000][m] węzeł 3 x=[2.000][m], y=[2.000][m]
7. WYZNACZANIE SIŁ WEWNĘTRZNYCH W BELKACH
 7. WYZNCZNIE SIŁ WEWNĘTRZNYCH W ELKCH Zadanie 7.1 Dla belki jak na rysunku 7.1.1 ułożyć równania sił wewnętrznych i sporządzić ich wykresy. Dane: q, a, M =. Rys.7.1.1 Rys.7.1. W zależności od rodzaju podpór
7. WYZNCZNIE SIŁ WEWNĘTRZNYCH W ELKCH Zadanie 7.1 Dla belki jak na rysunku 7.1.1 ułożyć równania sił wewnętrznych i sporządzić ich wykresy. Dane: q, a, M =. Rys.7.1.1 Rys.7.1. W zależności od rodzaju podpór
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2014/15
 Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2014/15 1. Warunkiem koniecznym i wystarczającym równowagi układu sił zbieżnych jest, aby a) wszystkie
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2014/15 1. Warunkiem koniecznym i wystarczającym równowagi układu sił zbieżnych jest, aby a) wszystkie
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2015/16
 Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2015/16 1. Warunkiem koniecznym i wystarczającym równowagi układu sił zbieżnych jest, aby a) wszystkie
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2015/16 1. Warunkiem koniecznym i wystarczającym równowagi układu sił zbieżnych jest, aby a) wszystkie
Z1/2 ANALIZA BELEK ZADANIE 2
 05/06 Z1/. NLIZ LK ZNI 1 Z1/ NLIZ LK ZNI Z1/.1 Zadanie Udowodnić geometryczną niezmienność belki złożonej na rysunku Z1/.1 a następnie wyznaczyć reakcje podporowe oraz wykresy siły poprzecznej i momentu
05/06 Z1/. NLIZ LK ZNI 1 Z1/ NLIZ LK ZNI Z1/.1 Zadanie Udowodnić geometryczną niezmienność belki złożonej na rysunku Z1/.1 a następnie wyznaczyć reakcje podporowe oraz wykresy siły poprzecznej i momentu
Mechanika i Budowa Maszyn
 Mechanika i Budowa Maszyn Materiały pomocnicze do ćwiczeń Wyznaczanie sił wewnętrznych w belkach statycznie wyznaczalnych Andrzej J. Zmysłowski Andrzej J. Zmysłowski Wyznaczanie sił wewnętrznych w belkach
Mechanika i Budowa Maszyn Materiały pomocnicze do ćwiczeń Wyznaczanie sił wewnętrznych w belkach statycznie wyznaczalnych Andrzej J. Zmysłowski Andrzej J. Zmysłowski Wyznaczanie sił wewnętrznych w belkach
Przykład Łuk ze ściągiem, obciążenie styczne. D A
 Przykład 1.4. Łuk ze ściągiem, obciążenie styczne. Rysunek przedstawia łuk trójprzegubowy, kołowy, ze ściągiem. Łuk obciążony jest obciążeniem stycznym do łuku, o stałej gęstości na jednostkę długości
Przykład 1.4. Łuk ze ściągiem, obciążenie styczne. Rysunek przedstawia łuk trójprzegubowy, kołowy, ze ściągiem. Łuk obciążony jest obciążeniem stycznym do łuku, o stałej gęstości na jednostkę długości
3. RÓWNOWAGA PŁASKIEGO UKŁADU SIŁ
 3. ÓWNOWG PŁSKIEGO UKŁDU SIŁ Zadanie 3. elka o długości 3a jest utwierdzona w punkcie zaś w punkcie spoczywa na podporze przegubowej ruchomej, rysunek 3... by belka była statycznie wyznaczalna w punkcie
3. ÓWNOWG PŁSKIEGO UKŁDU SIŁ Zadanie 3. elka o długości 3a jest utwierdzona w punkcie zaś w punkcie spoczywa na podporze przegubowej ruchomej, rysunek 3... by belka była statycznie wyznaczalna w punkcie
Mechanika teoretyczna
 Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
{H B= 6 kn. Przykład 1. Dana jest belka: Podać wykresy NTM.
 Przykład 1. Dana jest belka: Podać wykresy NTM. Niezależnie od sposobu rozwiązywania zadania, zacząć należy od zastąpienia podpór reakcjami. Na czas obliczania reakcji można zastąpić obciążenie ciągłe
Przykład 1. Dana jest belka: Podać wykresy NTM. Niezależnie od sposobu rozwiązywania zadania, zacząć należy od zastąpienia podpór reakcjami. Na czas obliczania reakcji można zastąpić obciążenie ciągłe
4.1. Modelowanie matematyczne
 4.1. Modelowanie matematyczne Model matematyczny Model matematyczny opisuje daną konstrukcję budowlaną za pomocą zmiennych. Wartości zmiennych będą należały to zbioru liczb rzeczywistych i będą one reprezentować
4.1. Modelowanie matematyczne Model matematyczny Model matematyczny opisuje daną konstrukcję budowlaną za pomocą zmiennych. Wartości zmiennych będą należały to zbioru liczb rzeczywistych i będą one reprezentować
5. METODA PRZEMIESZCZEŃ - PRZYKŁAD LICZBOWY
 Część 2. METODA PRZEMIESZCZEŃ PRZYKŁAD LICZBOWY.. METODA PRZEMIESZCZEŃ - PRZYKŁAD LICZBOWY.. Działanie sił zewnętrznych Znaleźć wykresy rzeczywistych sił wewnętrznych w ramie o schemacie i obciążeniu podanym
Część 2. METODA PRZEMIESZCZEŃ PRZYKŁAD LICZBOWY.. METODA PRZEMIESZCZEŃ - PRZYKŁAD LICZBOWY.. Działanie sił zewnętrznych Znaleźć wykresy rzeczywistych sił wewnętrznych w ramie o schemacie i obciążeniu podanym
1. ANALIZA BELEK I RAM PŁASKICH
 5/6 1. NIZ BEEK I RM PŁSKICH 1 1. NIZ BEEK I RM PŁSKICH 1.1 naliza kinematyczna podstawowe definicje Podstawowym pojęciem stosowanym w analizie kinematycznej belek i ram płaskich jest tarcza sztywna. Jest
5/6 1. NIZ BEEK I RM PŁSKICH 1 1. NIZ BEEK I RM PŁSKICH 1.1 naliza kinematyczna podstawowe definicje Podstawowym pojęciem stosowanym w analizie kinematycznej belek i ram płaskich jest tarcza sztywna. Jest
Mechanika teoretyczna
 Inne rodzaje obciążeń Mechanika teoretyczna Obciążenie osiowe rozłożone wzdłuż pręta. Obciążenie pionowe na pręcie ukośnym: intensywność na jednostkę rzutu; intensywność na jednostkę długości pręta. Wykład
Inne rodzaje obciążeń Mechanika teoretyczna Obciążenie osiowe rozłożone wzdłuż pręta. Obciążenie pionowe na pręcie ukośnym: intensywność na jednostkę rzutu; intensywność na jednostkę długości pręta. Wykład
WYMAGANIA EDUKACYJNE Z PRZEDMIOTU: KONSTRUKCJE BUDOWLANE klasa III Podstawa opracowania: PROGRAM NAUCZANIA DLA ZAWODU TECHNIK BUDOWNICTWA 311204
 WYMAGANIA EDUKACYJNE Z PRZEDMIOTU: KONSTRUKCJE BUDOWLANE klasa III Podstawa opracowania: PROGRAM NAUCZANIA DLA ZAWODU TECHNIK BUDOWNICTWA 311204 1 DZIAŁ PROGRAMOWY V. PODSTAWY STATYKI I WYTRZYMAŁOŚCI MATERIAŁÓW
WYMAGANIA EDUKACYJNE Z PRZEDMIOTU: KONSTRUKCJE BUDOWLANE klasa III Podstawa opracowania: PROGRAM NAUCZANIA DLA ZAWODU TECHNIK BUDOWNICTWA 311204 1 DZIAŁ PROGRAMOWY V. PODSTAWY STATYKI I WYTRZYMAŁOŚCI MATERIAŁÓW
? 14. Dana jest funkcja. Naszkicuj jej wykres. Dla jakich argumentów funkcja przyjmuje wartości dodatnie? 15. Dana jest funkcja f x 2 a x
 FUNKCE FUNKCJA LINIOWA Sporządź tabelkę i narysuj wykres funkcji ( ) Dla jakich argumentów wartości funkcji są większe od 5 Podaj warunek równoległości prostych Wyznacz równanie prostej równoległej do
FUNKCE FUNKCJA LINIOWA Sporządź tabelkę i narysuj wykres funkcji ( ) Dla jakich argumentów wartości funkcji są większe od 5 Podaj warunek równoległości prostych Wyznacz równanie prostej równoległej do
PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE
 PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE Podstawy statyki budowli: Pojęcia podstawowe Model matematyczny, w odniesieniu do konstrukcji budowlanej, opisuje ją za pomocą zmiennych. Wartości zmiennych
PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE Podstawy statyki budowli: Pojęcia podstawowe Model matematyczny, w odniesieniu do konstrukcji budowlanej, opisuje ją za pomocą zmiennych. Wartości zmiennych
ĆWICZENIE 7 Wykresy sił przekrojowych w ustrojach złożonych USTROJE ZŁOŻONE. A) o trzech reakcjach podporowych N=3
 o trzech reakcjach podporowych N=3") ĆWICZENIE 7 Wykresy sił przekrojowych w ustrojach złożonych USTROJE ZŁOŻONE A) o trzech reakcjach podporowych N=3 B) o liczbie większej niż 3 - reakcjach podporowych N>3 A) wyznaczanie reakcji z równań
ĆWICZENIE 7 Wykresy sił przekrojowych w ustrojach złożonych USTROJE ZŁOŻONE A) o trzech reakcjach podporowych N=3 B) o liczbie większej niż 3 - reakcjach podporowych N>3 A) wyznaczanie reakcji z równań
Narysować wykresy momentów i sił tnących w belce jak na rysunku. 3ql
 Narysować wykresy momentów i sił tnących w belce jak na rysunku. q l Określamy stopień statycznej niewyznaczalności: n s = r - 3 - p = 5-3 - 0 = 2 Przyjmujemy schemat podstawowy: X 2 X Zakładamy do obliczeń,
Narysować wykresy momentów i sił tnących w belce jak na rysunku. q l Określamy stopień statycznej niewyznaczalności: n s = r - 3 - p = 5-3 - 0 = 2 Przyjmujemy schemat podstawowy: X 2 X Zakładamy do obliczeń,
Z1/7. ANALIZA RAM PŁASKICH ZADANIE 3
 Z1/7. NLIZ RM PŁSKIH ZNI 3 1 Z1/7. NLIZ RM PŁSKIH ZNI 3 Z1/7.1 Zadanie 3 Narysować wykresy sił przekrojowych w ramie wspornikowej przedstawionej na rysunku Z1/7.1. Następnie sprawdzić równowagę sił przekrojowych
Z1/7. NLIZ RM PŁSKIH ZNI 3 1 Z1/7. NLIZ RM PŁSKIH ZNI 3 Z1/7.1 Zadanie 3 Narysować wykresy sił przekrojowych w ramie wspornikowej przedstawionej na rysunku Z1/7.1. Następnie sprawdzić równowagę sił przekrojowych
FUNKCJA LINIOWA - WYKRES
 FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (Postać kierunkowa) Funkcja liniowa jest podstawowym typem funkcji. Jest to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości
FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (Postać kierunkowa) Funkcja liniowa jest podstawowym typem funkcji. Jest to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości
PRÓBNA MATURA ZADANIA PRZYKŁADOWE
 ZESPÓŁ SZKÓŁ HOTELARSKO TURYSTYCZNO GASTRONOMICZNYCH NR UL. KRASNOŁĘCKA 3, WARSZAWA Z A D AN I A Z A M K N I Ę T E ) Liczba, której 5% jest równe 6, to : A. 0,3 C. 30. D. 0 5% 6 II sposób: x nieznana liczba
ZESPÓŁ SZKÓŁ HOTELARSKO TURYSTYCZNO GASTRONOMICZNYCH NR UL. KRASNOŁĘCKA 3, WARSZAWA Z A D AN I A Z A M K N I Ę T E ) Liczba, której 5% jest równe 6, to : A. 0,3 C. 30. D. 0 5% 6 II sposób: x nieznana liczba
METODA SIŁ KRATOWNICA
 Część. METDA SIŁ - RATWNICA.. METDA SIŁ RATWNICA Sposób rozwiązywania kratownic statycznie niewyznaczalnych metodą sił omówimy rozwiązują przykład liczbowy. Zadanie Dla kratownicy przedstawionej na rys..
Część. METDA SIŁ - RATWNICA.. METDA SIŁ RATWNICA Sposób rozwiązywania kratownic statycznie niewyznaczalnych metodą sił omówimy rozwiązują przykład liczbowy. Zadanie Dla kratownicy przedstawionej na rys..
ĆWICZENIE 6 Kratownice
 ĆWICZENIE 6 Kratownice definicja konstrukcja składająca się z prętów prostych połączonych przegubowo w węzłach, dla której jedynymi obciążeniami są siły skupione przyłożone w węzłach. Umowa: jeśli konstrukcja
ĆWICZENIE 6 Kratownice definicja konstrukcja składająca się z prętów prostych połączonych przegubowo w węzłach, dla której jedynymi obciążeniami są siły skupione przyłożone w węzłach. Umowa: jeśli konstrukcja
R o z w i ą z a n i e Przy zastosowaniu sposobu analitycznego należy wyznaczyć składowe wypadkowej P x i P y
 Przykład 1 Dane są trzy siły: P 1 = 3i + 4j, P 2 = 2i 5j, P 3 = 7i + 3j (składowe sił wyrażone są w niutonach), przecinające się w punkcie A (1, 2). Wyznaczyć wektor wypadkowej i jej wartość oraz kąt α
Przykład 1 Dane są trzy siły: P 1 = 3i + 4j, P 2 = 2i 5j, P 3 = 7i + 3j (składowe sił wyrażone są w niutonach), przecinające się w punkcie A (1, 2). Wyznaczyć wektor wypadkowej i jej wartość oraz kąt α
Przykład 4.1. Ściag stalowy. L200x100x cm 10 cm I120. Obliczyć dopuszczalną siłę P rozciagającą ściąg stalowy o przekroju pokazanym na poniższym
 Przykład 4.1. Ściag stalowy Obliczyć dopuszczalną siłę P rozciagającą ściąg stalowy o przekroju pokazanym na poniższym rysunku jeśli naprężenie dopuszczalne wynosi 15 MPa. Szukana siła P przyłożona jest
Przykład 4.1. Ściag stalowy Obliczyć dopuszczalną siłę P rozciagającą ściąg stalowy o przekroju pokazanym na poniższym rysunku jeśli naprężenie dopuszczalne wynosi 15 MPa. Szukana siła P przyłożona jest
Rachunek wektorowy - wprowadzenie. dr inż. Romuald Kędzierski
 Rachunek wektorowy - wprowadzenie dr inż. Romuald Kędzierski Graficzne przedstawianie wielkości wektorowych Długość wektora jest miarą jego wartości Linia prosta wyznaczająca kierunek działania wektora
Rachunek wektorowy - wprowadzenie dr inż. Romuald Kędzierski Graficzne przedstawianie wielkości wektorowych Długość wektora jest miarą jego wartości Linia prosta wyznaczająca kierunek działania wektora
2. Charakterystyki geometryczne przekroju
 . CHRKTERYSTYKI GEOMETRYCZNE PRZEKROJU 1.. Charakterystyki geometryczne przekroju.1 Podstawowe definicje Z przekrojem pręta związane są trzy wielkości fizyczne nazywane charakterystykami geometrycznymi
. CHRKTERYSTYKI GEOMETRYCZNE PRZEKROJU 1.. Charakterystyki geometryczne przekroju.1 Podstawowe definicje Z przekrojem pręta związane są trzy wielkości fizyczne nazywane charakterystykami geometrycznymi
FUNKCJA LINIOWA - WYKRES. y = ax + b. a i b to współczynniki funkcji, które mają wartości liczbowe
 FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (postać kierunkowa) Funkcja liniowa to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości liczbowe Szczególnie ważny w postaci
FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (postać kierunkowa) Funkcja liniowa to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości liczbowe Szczególnie ważny w postaci
WIADOMOŚCI WSTĘPNE, PRACA SIŁ NA PRZEMIESZCZENIACH
 Część 1 1. WIADOOŚCI WSTĘNE, RACA SIŁ NA RZEIESZCZENIAC 1 1.. 1. WIADOOŚCI WSTĘNE, RACA SIŁ NA RZEIESZCZENIAC 1.1. Wstęp echanika budowli stanowi dział mechaniki technicznej zajmującej się statyką, dynamiką,
Część 1 1. WIADOOŚCI WSTĘNE, RACA SIŁ NA RZEIESZCZENIAC 1 1.. 1. WIADOOŚCI WSTĘNE, RACA SIŁ NA RZEIESZCZENIAC 1.1. Wstęp echanika budowli stanowi dział mechaniki technicznej zajmującej się statyką, dynamiką,
PRÓBNA MATURA ZADANIA PRZYKŁADOWE
 ZESPÓŁ SZKÓŁ HOTELARSKO TURYSTYCZNO GASTRONOMICZNYCH NR UL. KRASNOŁĘCKA, WARSZAWA Z A D AN I A Z A M K N I Ę T E ) Liczba, której 5% jest równe 6, to : A. 0, C. 0. D. 0 5% 6 II sposób: x nieznana liczba
ZESPÓŁ SZKÓŁ HOTELARSKO TURYSTYCZNO GASTRONOMICZNYCH NR UL. KRASNOŁĘCKA, WARSZAWA Z A D AN I A Z A M K N I Ę T E ) Liczba, której 5% jest równe 6, to : A. 0, C. 0. D. 0 5% 6 II sposób: x nieznana liczba
Z1/1. ANALIZA BELEK ZADANIE 1
 05/06 Z1/1. NLIZ LK ZNI 1 1 Z1/1. NLIZ LK ZNI 1 Z1/1.1 Zadanie 1 Udowodnić geometryczną niezmienność belki złożonej na rysunku Z1/1.1 a następnie wyznaczyć reakcje podporowe oraz wykresy siły poprzecznej
05/06 Z1/1. NLIZ LK ZNI 1 1 Z1/1. NLIZ LK ZNI 1 Z1/1.1 Zadanie 1 Udowodnić geometryczną niezmienność belki złożonej na rysunku Z1/1.1 a następnie wyznaczyć reakcje podporowe oraz wykresy siły poprzecznej
Siły wewnętrzne - związki różniczkowe
 Siły wewnętrzne - związki różniczkowe Weźmy dowolny fragment belki obciążony wzdłuż osi obciążeniem n(x) oraz poprzecznie obciążeniem q(x). Na powyższym rysunku zwroty obciążeń są zgodne z dodatnimi zwrotami
Siły wewnętrzne - związki różniczkowe Weźmy dowolny fragment belki obciążony wzdłuż osi obciążeniem n(x) oraz poprzecznie obciążeniem q(x). Na powyższym rysunku zwroty obciążeń są zgodne z dodatnimi zwrotami
1. ANALIZA KINAMATYCZNA PŁASKICH UKŁADÓW PRĘTOWYCH
 1 1.1. Płaskie układy tarcz sztywnych naliza kinematyczna służy nam do określenia czy dany układ spełnia wszystkie warunki aby być konstrukcją budowlaną. Podstawowym pojęciem stosowanym w analizie kinematycznej
1 1.1. Płaskie układy tarcz sztywnych naliza kinematyczna służy nam do określenia czy dany układ spełnia wszystkie warunki aby być konstrukcją budowlaną. Podstawowym pojęciem stosowanym w analizie kinematycznej
Zajęcia nr 1 (1h) Dwumian Newtona. Indukcja. Zajęcia nr 2 i 3 (4h) Trygonometria
 Dwumian Newtona. Indukcja. Zajęcia nr 2 i 3 (4h) Trygonometria") Technologia Chemiczna 008/09 Zajęcia wyrównawcze. Pokazać, że: ( )( ) n k k l = ( n l )( n l k l Zajęcia nr (h) Dwumian Newtona. Indukcja. ). Rozwiązać ( ) ( równanie: ) n n a) = 0 b) 3 ( ) n 3. Znaleźć
Technologia Chemiczna 008/09 Zajęcia wyrównawcze. Pokazać, że: ( )( ) n k k l = ( n l )( n l k l Zajęcia nr (h) Dwumian Newtona. Indukcja. ). Rozwiązać ( ) ( równanie: ) n n a) = 0 b) 3 ( ) n 3. Znaleźć
3. FUNKCJA LINIOWA. gdzie ; ół,.
 1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
POLITECHNIKA POZNAŃSKA INSTYTUT KONSTRUKCJI BUDOWLANYCH Zakład Mechaniki Budowli LINIE WPŁYWOWE SIŁ W UKŁADACH STATYCZNIE WYZNACZALNYCH
 POLITECHNIKA POZNAŃSKA INSTYTUT KONSTRUKCJI BUDOWLANYCH Zakład Mechaniki Budowli ĆWICZENIE nr 1 LINIE WPŁYWOWE SIŁ W UKŁADACH STATYCZNIE WYZNACZALNYCH Prowadzący: mgr inż. A. Kaczor STUDIUM ZAOCZNE, II
POLITECHNIKA POZNAŃSKA INSTYTUT KONSTRUKCJI BUDOWLANYCH Zakład Mechaniki Budowli ĆWICZENIE nr 1 LINIE WPŁYWOWE SIŁ W UKŁADACH STATYCZNIE WYZNACZALNYCH Prowadzący: mgr inż. A. Kaczor STUDIUM ZAOCZNE, II
Przykład 1 Dany jest płaski układ czterech sił leżących w płaszczyźnie Oxy. Obliczyć wektor główny i moment główny tego układu sił.
 Przykład 1 Dany jest płaski układ czterech sił leżących w płaszczyźnie Oxy Obliczyć wektor główny i moment główny tego układu sił. Wektor główny układu sił jest równy Moment główny układu wynosi Przykład
Przykład 1 Dany jest płaski układ czterech sił leżących w płaszczyźnie Oxy Obliczyć wektor główny i moment główny tego układu sił. Wektor główny układu sił jest równy Moment główny układu wynosi Przykład
FUNKCJA KWADRATOWA. Zad 1 Przedstaw funkcję kwadratową w postaci ogólnej. Postać ogólna funkcji kwadratowej to: y = ax + bx + c;(
 Zad Przedstaw funkcję kwadratową w postaci ogólnej Przykład y = ( x ) + 5 (postać kanoniczna) FUNKCJA KWADRATOWA Postać ogólna funkcji kwadratowej to: y = ax + bx + c;( a 0) Aby ją uzyskać pozbywamy się
Zad Przedstaw funkcję kwadratową w postaci ogólnej Przykład y = ( x ) + 5 (postać kanoniczna) FUNKCJA KWADRATOWA Postać ogólna funkcji kwadratowej to: y = ax + bx + c;( a 0) Aby ją uzyskać pozbywamy się
Wymagania edukacyjne z matematyki w klasie trzeciej zasadniczej szkoły zawodowej
 Wymagania edukacyjne z matematyki w klasie trzeciej zasadniczej szkoły zawodowej Temat ocena dopuszczająca ocena dostateczna ocena dobra ocena bardzo dobra ocena celująca Dział I. TRYGONOMETRIA (15 h )
Wymagania edukacyjne z matematyki w klasie trzeciej zasadniczej szkoły zawodowej Temat ocena dopuszczająca ocena dostateczna ocena dobra ocena bardzo dobra ocena celująca Dział I. TRYGONOMETRIA (15 h )
Dział I FUNKCJE I ICH WŁASNOŚCI
 MATEMATYKA ZAKRES PODSTAWOWY Rok szkolny 01/013 Klasa: II Nauczyciel: Mirosław Kołomyjski Dział I FUNKCJE I ICH WŁASNOŚCI Lp. Zagadnienie Osiągnięcia ucznia. 1. Podstawowe własności funkcji.. Podaje określenie
MATEMATYKA ZAKRES PODSTAWOWY Rok szkolny 01/013 Klasa: II Nauczyciel: Mirosław Kołomyjski Dział I FUNKCJE I ICH WŁASNOŚCI Lp. Zagadnienie Osiągnięcia ucznia. 1. Podstawowe własności funkcji.. Podaje określenie
MECHANIKA I WYTRZYMAŁOŚĆ MATERIAŁÓW - OBLICZANIE SIŁ WEWNĘTRZNYCH W BELKACH
 ECHANIKA I WYTRZYAŁOŚĆ ATERIAŁÓW - OBLICZANIE SIŁ WEWNĘTRZNYCH W BELKACH ZAD. 1. OBLICZYĆ SIŁY TNĄCE ORAZ OENTY ZGINAJĄCE W BELCE ORAZ NARYSOWAĆ WYKRESY TYCH SIŁ Wyznaczamy siły reakcji. Obciążenie ciągłe
ECHANIKA I WYTRZYAŁOŚĆ ATERIAŁÓW - OBLICZANIE SIŁ WEWNĘTRZNYCH W BELKACH ZAD. 1. OBLICZYĆ SIŁY TNĄCE ORAZ OENTY ZGINAJĄCE W BELCE ORAZ NARYSOWAĆ WYKRESY TYCH SIŁ Wyznaczamy siły reakcji. Obciążenie ciągłe
FUNKCJE I RÓWNANIA KWADRATOWE. Lekcja 78. Pojęcie i wykres funkcji kwadratowej str
 FUNKCJE I RÓWNANIA KWADRATOWE Lekcja 78. Pojęcie i wykres funkcji kwadratowej str. 178-180. Funkcja kwadratowa to taka, której wykresem jest parabola. Definicja Funkcją kwadratową nazywamy funkcje postaci
FUNKCJE I RÓWNANIA KWADRATOWE Lekcja 78. Pojęcie i wykres funkcji kwadratowej str. 178-180. Funkcja kwadratowa to taka, której wykresem jest parabola. Definicja Funkcją kwadratową nazywamy funkcje postaci
Pojęcia, wymagania i przykładowe zadania na egzamin poprawkowy dla klas II w roku szkolnym 2016/2017 w Zespole Szkół Ekonomicznych w Zielonej Górze
 Pojęcia, wymagania i przykładowe zadania na egzamin poprawkowy dla klas II w roku szkolnym 2016/2017 w Zespole Szkół Ekonomicznych w Zielonej Górze I. Funkcja i jej własności POZIOM PODSTAWOWY Pojęcie
Pojęcia, wymagania i przykładowe zadania na egzamin poprawkowy dla klas II w roku szkolnym 2016/2017 w Zespole Szkół Ekonomicznych w Zielonej Górze I. Funkcja i jej własności POZIOM PODSTAWOWY Pojęcie
Geometria analityczna
 Geometria analityczna Paweł Mleczko Teoria Informacja (o prostej). postać ogólna prostej: Ax + By + C = 0, A + B 0, postać kanoniczna (kierunkowa) prostej: y = ax + b. Współczynnik a nazywamy współczynnikiem
Geometria analityczna Paweł Mleczko Teoria Informacja (o prostej). postać ogólna prostej: Ax + By + C = 0, A + B 0, postać kanoniczna (kierunkowa) prostej: y = ax + b. Współczynnik a nazywamy współczynnikiem
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
 Część 6. WYZNCZNIE LINII UGIĘCI W UKŁDCH PRĘTWYCH 6. 6. WYZNCZNIE LINII UGIĘCI W UKŁDCH PRĘTWYCH 6.. Wyznaczanie przemieszczeń z zastosowaniem równań pracy wirtualnej w układach prętowych W metodzie pracy
Część 6. WYZNCZNIE LINII UGIĘCI W UKŁDCH PRĘTWYCH 6. 6. WYZNCZNIE LINII UGIĘCI W UKŁDCH PRĘTWYCH 6.. Wyznaczanie przemieszczeń z zastosowaniem równań pracy wirtualnej w układach prętowych W metodzie pracy
Katedra Mechaniki Konstrukcji ĆWICZENIE PROJEKTOWE NR 1 Z MECHANIKI BUDOWLI
 Katedra Mechaniki Konstrukcji Wydział Budownictwa i Inżynierii Środowiska Politechniki Białostockiej... (imię i nazwisko)... (grupa, semestr, rok akademicki) ĆWICZENIE PROJEKTOWE NR Z MECHANIKI BUDOWLI
Katedra Mechaniki Konstrukcji Wydział Budownictwa i Inżynierii Środowiska Politechniki Białostockiej... (imię i nazwisko)... (grupa, semestr, rok akademicki) ĆWICZENIE PROJEKTOWE NR Z MECHANIKI BUDOWLI
1. A 2. A 3. B 4. B 5. C 6. B 7. B 8. D 9. A 10. D 11. C 12. D 13. B 14. D 15. C 16. C 17. C 18. B 19. D 20. C 21. C 22. D 23. D 24. A 25.
 1. A 2. A 3. B 4. B 5. C 6. B 7. B 8. D 9. A 10. D 11. C 12. D 13. B 14. D 15. C 16. C 17. C 18. B 19. D 20. C 21. C 22. D 23. D 24. A 25. A Najłatwiejszym sposobem jest rozpatrzenie wszystkich odpowiedzi
1. A 2. A 3. B 4. B 5. C 6. B 7. B 8. D 9. A 10. D 11. C 12. D 13. B 14. D 15. C 16. C 17. C 18. B 19. D 20. C 21. C 22. D 23. D 24. A 25. A Najłatwiejszym sposobem jest rozpatrzenie wszystkich odpowiedzi
Obliczenia statyczne ustrojów prętowych statycznie wyznaczalnych. Pręty obciążone osiowo Kratownice
 Tematyka wykładu 2 Obliczenia statyczne ustrojów prętowych statycznie wyznaczalnych ręty obciążone osiowo Kratownice Mechanika budowli - kratownice Kratownicą lub układem kratowym nazywamy układ prostoliniowych
Tematyka wykładu 2 Obliczenia statyczne ustrojów prętowych statycznie wyznaczalnych ręty obciążone osiowo Kratownice Mechanika budowli - kratownice Kratownicą lub układem kratowym nazywamy układ prostoliniowych
Autor: mgr inż. Robert Cypryjański METODY KOMPUTEROWE
 METODY KOMPUTEROWE PRZYKŁAD ZADANIA NR 1: ANALIZA STATYCZNA KRATOWNICY PŁASKIEJ ZA POMOCĄ MACIERZOWEJ METODY PRZEMIESZCZEŃ Polecenie: Wykonać obliczenia statyczne kratownicy za pomocą macierzowej metody
METODY KOMPUTEROWE PRZYKŁAD ZADANIA NR 1: ANALIZA STATYCZNA KRATOWNICY PŁASKIEJ ZA POMOCĄ MACIERZOWEJ METODY PRZEMIESZCZEŃ Polecenie: Wykonać obliczenia statyczne kratownicy za pomocą macierzowej metody
Zadanie 3. Belki statycznie wyznaczalne. Dla belek statycznie wyznaczalnych przedstawionych. na rysunkach rys.a, rys.b, wyznaczyć:
 adanie 3. elki statycznie wyznaczalne. 15K la belek statycznie wyznaczalnych przedstawionych na rysunkach rys., rys., wyznaczyć: 18K 0.5m 1.5m 1. składowe reakcji podpór, 2. zapisać funkcje sił przekrojowych,
adanie 3. elki statycznie wyznaczalne. 15K la belek statycznie wyznaczalnych przedstawionych na rysunkach rys., rys., wyznaczyć: 18K 0.5m 1.5m 1. składowe reakcji podpór, 2. zapisać funkcje sił przekrojowych,
Zadania do samodzielnego rozwiązania zestaw 11
 Zadania do samodzielnego rozwiązania zestaw 11 1 Podać definicję pochodnej funkcji w punkcie, a następnie korzystając z tej definicji obliczyć ( ) π (a) f, jeśli f(x) = cos x, (e) f (0), jeśli f(x) = 4
Zadania do samodzielnego rozwiązania zestaw 11 1 Podać definicję pochodnej funkcji w punkcie, a następnie korzystając z tej definicji obliczyć ( ) π (a) f, jeśli f(x) = cos x, (e) f (0), jeśli f(x) = 4
Funkcja liniowa - podsumowanie
 Funkcja liniowa - podsumowanie 1. Funkcja - wprowadzenie Założenie wyjściowe: Rozpatrywana będzie funkcja opisana w dwuwymiarowym układzie współrzędnych X. Oś X nazywana jest osią odciętych (oś zmiennych
Funkcja liniowa - podsumowanie 1. Funkcja - wprowadzenie Założenie wyjściowe: Rozpatrywana będzie funkcja opisana w dwuwymiarowym układzie współrzędnych X. Oś X nazywana jest osią odciętych (oś zmiennych
FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH
 FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH PROPORCJONALNOŚĆ PROSTA Proporcjonalnością prostą nazywamy zależność między dwoma wielkościami zmiennymi x i y, określoną wzorem: y = a x Gdzie a jest
FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH PROPORCJONALNOŚĆ PROSTA Proporcjonalnością prostą nazywamy zależność między dwoma wielkościami zmiennymi x i y, określoną wzorem: y = a x Gdzie a jest
Wytrzymałość Materiałów
 Wytrzymałość Materiałów Zginanie Wyznaczanie sił wewnętrznych w belkach i ramach, analiza stanu naprężeń i odkształceń, warunek bezpieczeństwa Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości,
Wytrzymałość Materiałów Zginanie Wyznaczanie sił wewnętrznych w belkach i ramach, analiza stanu naprężeń i odkształceń, warunek bezpieczeństwa Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości,
WYZNACZANIE SIŁ WEWNĘTRZNYCH W BELCE
 POLITECHNIKA POZNAŃSKA INSTYTUT KONSTRUKCJI BUDOWLANYCH Zakład Mechaniki Budowli ĆWICZENIE nr 2 WYZNACZANIE SIŁ WEWNĘTRZNYCH W BELCE Prowadzący: mgr inŝ. A. Kaczor STUDIA DZIENNE MAGISTERSKIE, I ROK Wykonał:
POLITECHNIKA POZNAŃSKA INSTYTUT KONSTRUKCJI BUDOWLANYCH Zakład Mechaniki Budowli ĆWICZENIE nr 2 WYZNACZANIE SIŁ WEWNĘTRZNYCH W BELCE Prowadzący: mgr inŝ. A. Kaczor STUDIA DZIENNE MAGISTERSKIE, I ROK Wykonał:
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
 Część 1 8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH 1 8. 8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH 8.1. Analiza kinematyczna płaskiego układu tarcz sztywnych. Układy statycznie
Część 1 8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH 1 8. 8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH 8.1. Analiza kinematyczna płaskiego układu tarcz sztywnych. Układy statycznie
Z1/1. ANALIZA KINEMATYCZNA PŁASKICH UKŁADÓW PRĘTOWYCH ZADANIE 1
 Z/. NLZ KNEMTYCZN PŁSKCH UKŁDÓW PRĘTOWYCH ZDNE Z/. NLZ KNEMTYCZN PŁSKCH UKŁDÓW PRĘTOWYCH ZDNE Z/.. Kratownica numer Sprawdzić czy kratownica płaska przedstawiona na rysunku Z/. jest układem geometrycznie
Z/. NLZ KNEMTYCZN PŁSKCH UKŁDÓW PRĘTOWYCH ZDNE Z/. NLZ KNEMTYCZN PŁSKCH UKŁDÓW PRĘTOWYCH ZDNE Z/.. Kratownica numer Sprawdzić czy kratownica płaska przedstawiona na rysunku Z/. jest układem geometrycznie
Mechanika teoretyczna
 Siła skupiona Mechanika teoretyczna Wykłady nr 5 Obliczanie sił wewnętrznych w belkach przykłady 1 2 Moment skupiony Obciążenie ciągłe równomierne 3 4 Obciążenie ciągłe liniowo zmienne Obciążenie ciągłe
Siła skupiona Mechanika teoretyczna Wykłady nr 5 Obliczanie sił wewnętrznych w belkach przykłady 1 2 Moment skupiony Obciążenie ciągłe równomierne 3 4 Obciążenie ciągłe liniowo zmienne Obciążenie ciągłe
Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie
 Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie materiały pomocnicze do zajęć audytoryjnych i projektowych opracowanie: dr inż. Piotr Dębski, dr inż. Dariusz Zaręba
Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie materiały pomocnicze do zajęć audytoryjnych i projektowych opracowanie: dr inż. Piotr Dębski, dr inż. Dariusz Zaręba
Przygotowanie do poprawki klasa 1li
 Zadanie Rozwiąż równanie x 6 5 x 4 Przygotowanie do poprawki klasa li Zadanie Rozwiąż nierówność x 4 x 5 Zadanie Oblicz: a) 9 b) 6 5 c) 64 4 d) 6 0 e) 8 f) 7 5 6 Zadanie 4 Zapisz podane liczby bez znaku
Zadanie Rozwiąż równanie x 6 5 x 4 Przygotowanie do poprawki klasa li Zadanie Rozwiąż nierówność x 4 x 5 Zadanie Oblicz: a) 9 b) 6 5 c) 64 4 d) 6 0 e) 8 f) 7 5 6 Zadanie 4 Zapisz podane liczby bez znaku
Liczba godzin Liczba tygodni w tygodniu w semestrze
 15. Przedmiot: WYTRZYMAŁOŚĆ MATERIAŁÓW Kierunek: Mechatronika Specjalność: mechatronika systemów energetycznych Rozkład zajęć w czasie studiów Liczba godzin Liczba godzin Liczba tygodni w tygodniu w semestrze
15. Przedmiot: WYTRZYMAŁOŚĆ MATERIAŁÓW Kierunek: Mechatronika Specjalność: mechatronika systemów energetycznych Rozkład zajęć w czasie studiów Liczba godzin Liczba godzin Liczba tygodni w tygodniu w semestrze
ĆWICZENIE 3 Wykresy sił przekrojowych dla ram. Zasady graficzne sporządzania wykresów sił przekrojowych dla ram
 ĆWICZENIE 3 Wykresy sił przekrojowych dla ram Zasady graficzne sporządzania wykresów sił przekrojowych dla ram Wykresy N i Q Wykres sił dodatnich może być narysowany zarówno po górnej jak i dolnej stronie
ĆWICZENIE 3 Wykresy sił przekrojowych dla ram Zasady graficzne sporządzania wykresów sił przekrojowych dla ram Wykresy N i Q Wykres sił dodatnich może być narysowany zarówno po górnej jak i dolnej stronie
ĆWICZENIE 2 WYKRESY sił przekrojowych dla belek prostych
 ĆWICZENIE 2 WYKRESY sił przekrojowych dla belek prostych bez pisania funkcji Układ płaski - konwencja zwrotu osi układu domniemany globalny układ współrzędnych ze zwrotem osi jak na rysunku (nawet jeśli
ĆWICZENIE 2 WYKRESY sił przekrojowych dla belek prostych bez pisania funkcji Układ płaski - konwencja zwrotu osi układu domniemany globalny układ współrzędnych ze zwrotem osi jak na rysunku (nawet jeśli
Zadanie 3 Oblicz jeżeli wiadomo, że liczby 8 2,, 1, , tworzą ciąg arytmetyczny. Wyznacz różnicę ciągu. Rozwiązanie:
 Zadanie 3 Oblicz jeżeli wiadomo, że liczby 8 2,, 1, 6 11 6 11, tworzą ciąg arytmetyczny. Wyznacz różnicę ciągu. Uprośćmy najpierw liczby dane w treści zadania: 8 2, 2 2 2 2 2 2 6 11 6 11 6 11 26 11 6 11
Zadanie 3 Oblicz jeżeli wiadomo, że liczby 8 2,, 1, 6 11 6 11, tworzą ciąg arytmetyczny. Wyznacz różnicę ciągu. Uprośćmy najpierw liczby dane w treści zadania: 8 2, 2 2 2 2 2 2 6 11 6 11 6 11 26 11 6 11
Przykład 7.3. Belka jednoprzęsłowa z dwoma wspornikami
 Przykład.. eka jednoprzęsłowa z dwoma wspornikami Narysować wykresy sił przekrojowych da poniższej beki. α Rozwiązanie Rozwiązywanie zadania rozpocząć naeży od oznaczenia punktów charakterystycznych, składowych
Przykład.. eka jednoprzęsłowa z dwoma wspornikami Narysować wykresy sił przekrojowych da poniższej beki. α Rozwiązanie Rozwiązywanie zadania rozpocząć naeży od oznaczenia punktów charakterystycznych, składowych
Matematyka licea ogólnokształcące, technika
 Matematyka licea ogólnokształcące, technika Opracowano m.in. na podstawie podręcznika MATEMATYKA w otaczającym nas świecie zakres podstawowy i rozszerzony Funkcja liniowa Funkcję f: R R określoną wzorem
Matematyka licea ogólnokształcące, technika Opracowano m.in. na podstawie podręcznika MATEMATYKA w otaczającym nas świecie zakres podstawowy i rozszerzony Funkcja liniowa Funkcję f: R R określoną wzorem
MATEMATYKA 8. Funkcje trygonometryczne kąta ostrego (α < 90 ). Stosunki długości boków trójkąta prostokątnego nazywamy funkcjami trygonometrycznymi.
. Stosunki długości boków trójkąta prostokątnego nazywamy funkcjami trygonometrycznymi.") INSTYTUT MEDICUS Kurs przygotowawczy do matury i rekrutacji na studia medyczne Rok 017/018 www.medicus.edu.pl tel. 501 38 39 55 MATEMATYKA 8 FUNKCJE TRYGONOMETRYCZNE. Funkcje trygonometryczne kąta ostrego
INSTYTUT MEDICUS Kurs przygotowawczy do matury i rekrutacji na studia medyczne Rok 017/018 www.medicus.edu.pl tel. 501 38 39 55 MATEMATYKA 8 FUNKCJE TRYGONOMETRYCZNE. Funkcje trygonometryczne kąta ostrego
Zadania przygotowawcze do konkursu o tytuł NAJLEPSZEGO MATEMATYKA KLAS PIERWSZYCH I DRUGICH POWIATU BOCHEŃSKIEGO rok szk. 2017/2018.
 Zadania przygotowawcze do konkursu o tytuł NAJLEPSZEGO MATEMATYKA KLAS PIERWSZYCH I DRUGICH POWIATU BOCHEŃSKIEGO rok szk. 017/018 19 grudnia 017 1 1 Klasy pierwsze - poziom podstawowy 1. Dane są zbiory
Zadania przygotowawcze do konkursu o tytuł NAJLEPSZEGO MATEMATYKA KLAS PIERWSZYCH I DRUGICH POWIATU BOCHEŃSKIEGO rok szk. 017/018 19 grudnia 017 1 1 Klasy pierwsze - poziom podstawowy 1. Dane są zbiory
Zagadnienia z matematyki dla klasy II oraz przykładowe zadania
 Zagadnienia z matematyki dla klasy II oraz przykładowe zadania FUNKCJA KWADRATOWA Wykres funkcji f (x) = ax Przesunięcie wykresu funkcji f(x) = ax o wektor Postać kanoniczna i postać ogólna funkcji kwadratowej
Zagadnienia z matematyki dla klasy II oraz przykładowe zadania FUNKCJA KWADRATOWA Wykres funkcji f (x) = ax Przesunięcie wykresu funkcji f(x) = ax o wektor Postać kanoniczna i postać ogólna funkcji kwadratowej
Uwaga: Linie wpływu w trzech prętach.
 Zestaw nr 1 Imię i nazwisko zadanie 1 2 3 4 5 6 7 Razem punkty Zad.1 (5p.). Narysować wykresy linii wpływu sił wewnętrznych w przekrojach K i L oraz reakcji w podporze R. Zad.2 (5p.). Narysować i napisać
Zestaw nr 1 Imię i nazwisko zadanie 1 2 3 4 5 6 7 Razem punkty Zad.1 (5p.). Narysować wykresy linii wpływu sił wewnętrznych w przekrojach K i L oraz reakcji w podporze R. Zad.2 (5p.). Narysować i napisać
KRATOWNICE 1. Definicja: konstrukcja prętowa, składająca się z prętów prostych połączonych ze sobą przegubami. pas górny.
 KRTOWNIE efinicja: konstrukcja prętowa, składająca się z prętów prostych połączonych ze sobą przegubami słupki pas górny krzyżulce pas dolny Założenia: pręty są połączone w węzłach przegubami idealnymi
KRTOWNIE efinicja: konstrukcja prętowa, składająca się z prętów prostych połączonych ze sobą przegubami słupki pas górny krzyżulce pas dolny Założenia: pręty są połączone w węzłach przegubami idealnymi
Podpory sprężyste (podatne), mogą ulegać skróceniu lub wydłużeniu pod wpływem działających sił. Przemieszczenia występujące w tych podporach są
, mogą ulegać skróceniu lub wydłużeniu pod wpływem działających sił. Przemieszczenia występujące w tych podporach są") PODPORY SPRĘŻYSTE Podpory sprężyste (podatne), mogą ulegać skróceniu lub wydłużeniu pod wpływem działających sił. Przemieszczenia występujące w tych podporach są wprost proporcjonalne do reakcji w nich
PODPORY SPRĘŻYSTE Podpory sprężyste (podatne), mogą ulegać skróceniu lub wydłużeniu pod wpływem działających sił. Przemieszczenia występujące w tych podporach są wprost proporcjonalne do reakcji w nich
TRYGONOMETRIA. 1. Definicje i własności funkcji trygonometrycznych
 TRYGONOMETRIA. Definicje i własności funkcji trygonometrycznych Funkcje trygonometryczne kąta ostrego można zdefiniować przy użyciu trójkąta prostokątnego: c a α b DEFINICJA. Sinusem kąta ostrego α w trójkącie
TRYGONOMETRIA. Definicje i własności funkcji trygonometrycznych Funkcje trygonometryczne kąta ostrego można zdefiniować przy użyciu trójkąta prostokątnego: c a α b DEFINICJA. Sinusem kąta ostrego α w trójkącie
1. Obciążenie statyczne
 . Obciążenie statyczne.. Obliczenie stopnia kinematycznej niewyznaczalności n = Σ ϕ + Σ = + = p ( ) Σ = w p + d u = 5 + 5 + 0 0 =. Schemat podstawowy metody przemieszczeń . Schemat odkształceń łańcucha
. Obciążenie statyczne.. Obliczenie stopnia kinematycznej niewyznaczalności n = Σ ϕ + Σ = + = p ( ) Σ = w p + d u = 5 + 5 + 0 0 =. Schemat podstawowy metody przemieszczeń . Schemat odkształceń łańcucha
WYMAGANIA EDUKACYJNE NIEZBĘDNE DO OTRZYMANIA PRZEZ UCZNIA POSZCZEGÓLNYCH ŚRÓDROCZNYCH I ROCZNYCH OCEN KLASYFIKACYJNYCH Z MATEMATYKI
 WYMAGANIA EDUKACYJNE NIEZBĘDNE DO OTRZYMANIA PRZEZ UCZNIA POSZCZEGÓLNYCH ŚRÓDROCZNYCH I ROCZNYCH OCEN KLASYFIKACYJNYCH Z MATEMATYKI (zakres podstawowy) Rok szkolny 2017/2018 - klasa 2a, 2b, 2c 1. Funkcja
WYMAGANIA EDUKACYJNE NIEZBĘDNE DO OTRZYMANIA PRZEZ UCZNIA POSZCZEGÓLNYCH ŚRÓDROCZNYCH I ROCZNYCH OCEN KLASYFIKACYJNYCH Z MATEMATYKI (zakres podstawowy) Rok szkolny 2017/2018 - klasa 2a, 2b, 2c 1. Funkcja
Egzamin ustny z matematyki semestr II Zakres wymaganych wiadomości i umiejętności
 Egzamin ustny z matematyki semestr II Zakres wymaganych wiadomości i umiejętności I. Pojęcie funkcji definicja różne sposoby opisu funkcji określenie dziedziny, zbioru wartości, miejsc zerowych. Należy
Egzamin ustny z matematyki semestr II Zakres wymaganych wiadomości i umiejętności I. Pojęcie funkcji definicja różne sposoby opisu funkcji określenie dziedziny, zbioru wartości, miejsc zerowych. Należy
Funkcja kwadratowa. f(x) = ax 2 + bx + c,
 = ax 2 + bx + c,") Funkcja kwadratowa. Funkcją kwadratową nazywamy funkcję f : R R określoną wzorem gdzie a, b, c R, a 0. f(x) = ax 2 + bx + c, Szczególnym przypadkiem funkcji kwadratowej jest funkcja f(x) = ax 2, a R \
Funkcja kwadratowa. Funkcją kwadratową nazywamy funkcję f : R R określoną wzorem gdzie a, b, c R, a 0. f(x) = ax 2 + bx + c, Szczególnym przypadkiem funkcji kwadratowej jest funkcja f(x) = ax 2, a R \
KRYTERIA OCENIANIA Z MATEMATYKI W OPARCIU O PODSTAWĘ PROGRAMOWĄ I PROGRAM NAUCZANIA MATEMATYKA 2001 DLA KLASY DRUGIEJ
 KRYTERIA OCENIANIA Z MATEMATYKI W OPARCIU O PODSTAWĘ PROGRAMOWĄ I PROGRAM NAUCZANIA MATEMATYKA 2001 DLA KLASY DRUGIEJ TREŚCI KSZTAŁCENIA WYMAGANIA PODSTAWOWE WYMAGANIA PONADPODSTAWOWE Liczby wymierne i
KRYTERIA OCENIANIA Z MATEMATYKI W OPARCIU O PODSTAWĘ PROGRAMOWĄ I PROGRAM NAUCZANIA MATEMATYKA 2001 DLA KLASY DRUGIEJ TREŚCI KSZTAŁCENIA WYMAGANIA PODSTAWOWE WYMAGANIA PONADPODSTAWOWE Liczby wymierne i
Przykład 4.2. Sprawdzenie naprężeń normalnych
 Przykład 4.. Sprawdzenie naprężeń normalnych Sprawdzić warunki nośności przekroju ze względu na naprężenia normalne jeśli naprężenia dopuszczalne są równe: k c = 0 MPa k r = 80 MPa 0, kn 0 kn m 0,5 kn/m
Przykład 4.. Sprawdzenie naprężeń normalnych Sprawdzić warunki nośności przekroju ze względu na naprężenia normalne jeśli naprężenia dopuszczalne są równe: k c = 0 MPa k r = 80 MPa 0, kn 0 kn m 0,5 kn/m
x+h=10 zatem h=10-x gdzie x>0 i h>0
 Zadania optymalizacyjne. Jaka jest największa możliwa wartość iloczynu dwóch liczb, których suma jest równa 60? Rozwiązanie: KROK USTALENIE WZORU Liczby oznaczamy przez a i b więc x+y=60 Następnie wyznaczamy
Zadania optymalizacyjne. Jaka jest największa możliwa wartość iloczynu dwóch liczb, których suma jest równa 60? Rozwiązanie: KROK USTALENIE WZORU Liczby oznaczamy przez a i b więc x+y=60 Następnie wyznaczamy
Równania prostych i krzywych; współrzędne punktu
 Równania prostych i krzywych; współrzędne punktu Zad 1: Na paraboli o równaniu y = 1 x znajdź punkt P leŝący najbliŝej prostej o równaniu x + y = 0 Napisz równanie stycznej do tej paraboli, poprowadzonej
Równania prostych i krzywych; współrzędne punktu Zad 1: Na paraboli o równaniu y = 1 x znajdź punkt P leŝący najbliŝej prostej o równaniu x + y = 0 Napisz równanie stycznej do tej paraboli, poprowadzonej
Zagadnienia z matematyki dla klasy II oraz przykładowe zadania
 Zagadnienia z matematyki dla klasy II oraz przykładowe zadania FUNKCJA KWADRATOWA Wykres funkcji f () = a Przesunięcie wykresu funkcji f() = a o wektor Postać kanoniczna i postać ogólna funkcji kwadratowej
Zagadnienia z matematyki dla klasy II oraz przykładowe zadania FUNKCJA KWADRATOWA Wykres funkcji f () = a Przesunięcie wykresu funkcji f() = a o wektor Postać kanoniczna i postać ogólna funkcji kwadratowej
Funkcja liniowa i prosta podsumowanie
 Funkcja liniowa i prosta podsumowanie Definicja funkcji liniowej Funkcja liniowa określona jest wzorem postaci: y = ax + b, x R, a R, b R a, b współczynniki funkcji dowolne liczby rzeczywiste a- współczynnik
Funkcja liniowa i prosta podsumowanie Definicja funkcji liniowej Funkcja liniowa określona jest wzorem postaci: y = ax + b, x R, a R, b R a, b współczynniki funkcji dowolne liczby rzeczywiste a- współczynnik
MECHANIKA OGÓLNA wykład 4
 MECHNIK OGÓLN wykład 4 D R I N Ż. G T M R Y N I K Obliczanie sił wewnętrznych w układach prętowych. K R T O W N I C E KRTOWNIC UKŁD PRĘTÓW PROSTOLINIOWYCH Przegubowe połączenia w węzłach Obciążenie węzłowe
MECHNIK OGÓLN wykład 4 D R I N Ż. G T M R Y N I K Obliczanie sił wewnętrznych w układach prętowych. K R T O W N I C E KRTOWNIC UKŁD PRĘTÓW PROSTOLINIOWYCH Przegubowe połączenia w węzłach Obciążenie węzłowe
2kN/m Zgodnie z wyznaczonym zadaniem przed rozpoczęciem obliczeń dobieram wstępne przekroje prętów.
 2kN/m -20 C D 5kN 0,006m A B 0,004m +0 +20 0,005rad E 4 2 4 [m] Układ prętów ma dwie tarcze i osiem reakcji w podporach. Stopień statycznej niewyznaczalności SSN= 2, ponieważ, przy dwóch tarczach powinno
2kN/m -20 C D 5kN 0,006m A B 0,004m +0 +20 0,005rad E 4 2 4 [m] Układ prętów ma dwie tarcze i osiem reakcji w podporach. Stopień statycznej niewyznaczalności SSN= 2, ponieważ, przy dwóch tarczach powinno
WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY DRUGIEJ LICEUM OGÓLNOKSZTAŁCĄCEGO ZAKRES PODSTAWOWY
 WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY DRUGIEJ LICEUM OGÓLNOKSZTAŁCĄCEGO ZAKRES PODSTAWOWY I. Funkcja liniowa dopuszczającą jeżeli: wie, jaką zależność między dwiema wielkościami zmiennymi nazywamy
WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY DRUGIEJ LICEUM OGÓLNOKSZTAŁCĄCEGO ZAKRES PODSTAWOWY I. Funkcja liniowa dopuszczającą jeżeli: wie, jaką zależność między dwiema wielkościami zmiennymi nazywamy
2. Charakterystyki geometryczne przekroju
 . CHRKTERYSTYKI GEOMETRYCZNE PRZEKROJU 1.. Charakterystyki geometryczne przekroju.1 Podstawowe definicje Z przekrojem pręta związane są trzy wielkości fizyczne nazywane charakterystykami geometrycznymi
. CHRKTERYSTYKI GEOMETRYCZNE PRZEKROJU 1.. Charakterystyki geometryczne przekroju.1 Podstawowe definicje Z przekrojem pręta związane są trzy wielkości fizyczne nazywane charakterystykami geometrycznymi
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Treść ćwiczenia T6: Wyznaczanie sił wewnętrznych w belkach
 Instrukcja przygotowania i realizacji scenariusza dotyczącego ćwiczenia 6 z przedmiotu "Wytrzymałość materiałów", przeznaczona dla studentów II roku studiów stacjonarnych I stopnia w kierunku Energetyka
Instrukcja przygotowania i realizacji scenariusza dotyczącego ćwiczenia 6 z przedmiotu "Wytrzymałość materiałów", przeznaczona dla studentów II roku studiów stacjonarnych I stopnia w kierunku Energetyka
Sił Si y y w ewnętrzne (1)(1 Mamy my bry r łę y łę mate t r e iralną obc ob iążon ż ą u kła k de d m e si m ł si ł
(1 Mamy my bry r łę y łę mate t r e iralną obc ob iążon ż ą u kła k de d m e si m ł si ł") echanika ogóna Wykład nr 5 Statyczna wyznaczaność układu. Siły wewnętrzne. 1 Stopień statycznej wyznaczaności Stopień zewnętrznej statycznej wyznaczaności n: Beka: n=rgrs; Rama: n=r3ogrs; rs; Kratownica:
echanika ogóna Wykład nr 5 Statyczna wyznaczaność układu. Siły wewnętrzne. 1 Stopień statycznej wyznaczaności Stopień zewnętrznej statycznej wyznaczaności n: Beka: n=rgrs; Rama: n=r3ogrs; rs; Kratownica:
Al.Politechniki 6, Łódź, Poland, Tel/Fax (48) (42) Mechanika Budowli. Inżynieria Środowiska, sem. III
 (42) Mechanika Budowli. Inżynieria Środowiska, sem. III") KATEDRA MECHANIKI MATERIAŁÓW POLITECHNIKA ŁÓDZKA DEPARTMENT OF MECHANICS OF MATERIALS TECHNICAL UNIVERSITY OF ŁÓDŹ Al.Politechniki 6, 93-590 Łódź, Poland, Tel/Fax (48) (42) 631 35 51 Mechanika Budowli
KATEDRA MECHANIKI MATERIAŁÓW POLITECHNIKA ŁÓDZKA DEPARTMENT OF MECHANICS OF MATERIALS TECHNICAL UNIVERSITY OF ŁÓDŹ Al.Politechniki 6, 93-590 Łódź, Poland, Tel/Fax (48) (42) 631 35 51 Mechanika Budowli