Eliminacja drgań przy wykorzystaniu dynamicznego tłumika drgań z inerterem o zmiennej inertancji
|
|
|
- Eleonora Baran
- 7 lat temu
- Przeglądów:
Transkrypt
1 Eliminacja drgań przy wykorzystaniu dynamicznego tłumika drgań z inerterem o zmiennej inertancji Przemysław Perlikowski Katedra Dynamiki Maszyn Politechnika Łódzka IPPT PAN Warszawa
2 Współautorzy Piotr Brzeski, Mateusz Lazarek, Tomasz Kapitaniak Katedra Dynamiki Maszyn, Politechnika Łódzka


3 Urządzenie do tłumienia drgań, patent Nr
4 Wstęp Dynamiczny Tłumik Drgań (DTD) Liniowy DTD Nieliniowy DTD Wiele DTD DTD ze zmiennymi parametrami DTD pasywne DTD semiaktywne DTD aktywne
5 Wstęp Dynamiczny Tłumik Drgań Liniowy DTD Nieliniowy DTD Wiele DTD DTD ze zmiennymi parametrami DTD pasywne DTD semiaktywne DTD aktywne



6 * Lodz University of Technology Wstęp Dynamiczny Tłumik Drgań* Inerter Wariator - CVT
7 DTD wg. patentu Częstość drgań własnych DTD ω m, k, c T, I = 2 k m + I c T 4 m + I 2 Tłumienie c T odpowiada tłumieniu wiskotycznemu oraz oporom tarcia jest to wartość mała i może być pominięta: ω m, k, I = k m + I Model układu składa się z: ruchoma masa DTD (A) która jest połączona przez sprężynę (B), inerter (C) oraz tłumik (D) do płyty (E) która umożliwia zamocowanie DTD do układu którego drgania chcemy tłumić.
8 Wyniki numeryczne
9 ሷ ሶ ሶ Lodz University of Technology Model matematyczny Wymiarowe równanie ruchu: Mx ሷ + k 1 x + k 2 x 3 + cx ሶ + I +c T x y ሶ = F cos ω 0 t xሷ y ሷ + k x y + myሷ I xሷ yሷ k x y c T xሶ y ሶ = 0 Bezwymiarowe równanie ruchu: x + x + k 2D x 3 + cd x ሶ + I D x y ሶ = F D cos ω t +c TD x ሷ y ሷ + k D x y + y ሷ I D x ሷ y ሷ k D x y c TD x ሶ y ሶ = 0 gdzie: c D = 0.08, F D = oraz trzy wartości sztywności k 2D k 2D = 0, k 2D = 30 i k 2D = 60. Inertancja I D zależy od częstości wymuszenia harmonicznego ω. Dla ułatwienia, w równaniach bezwymiarowych pominęliśmy primy.
10 Wyniki numeryczne
11 Wykres amplitudowo-częstotliwościowy dla k 2D = 0 Panel (a) pokazuje wyniki uzyskane dla II zestawu parametrów DTD. Na panelu (b) pokazano porównanie wykresów dla wszystkich 4 zestawów parametrów DTD.
12 Wykres amplitudowo-częstotliwościowy dla k 2D = 30 Panel (a) pokazuje wyniki uzyskane dla II zestawu parametrów DTD. Na panelu (b) pokazano porównanie wykresów dla wszystkich 4 zestawów parametrów DTD.
13 Wykres amplitudowo-częstotliwościowy dla k 2D = 60 Panel (a) pokazuje wyniki uzyskane dla II zestawu parametrów DTD. Na panelu (b) pokazano porównanie wykresów dla wszystkich 4 zestawów parametrów DTD.

14 Stanowisko doświadczalne
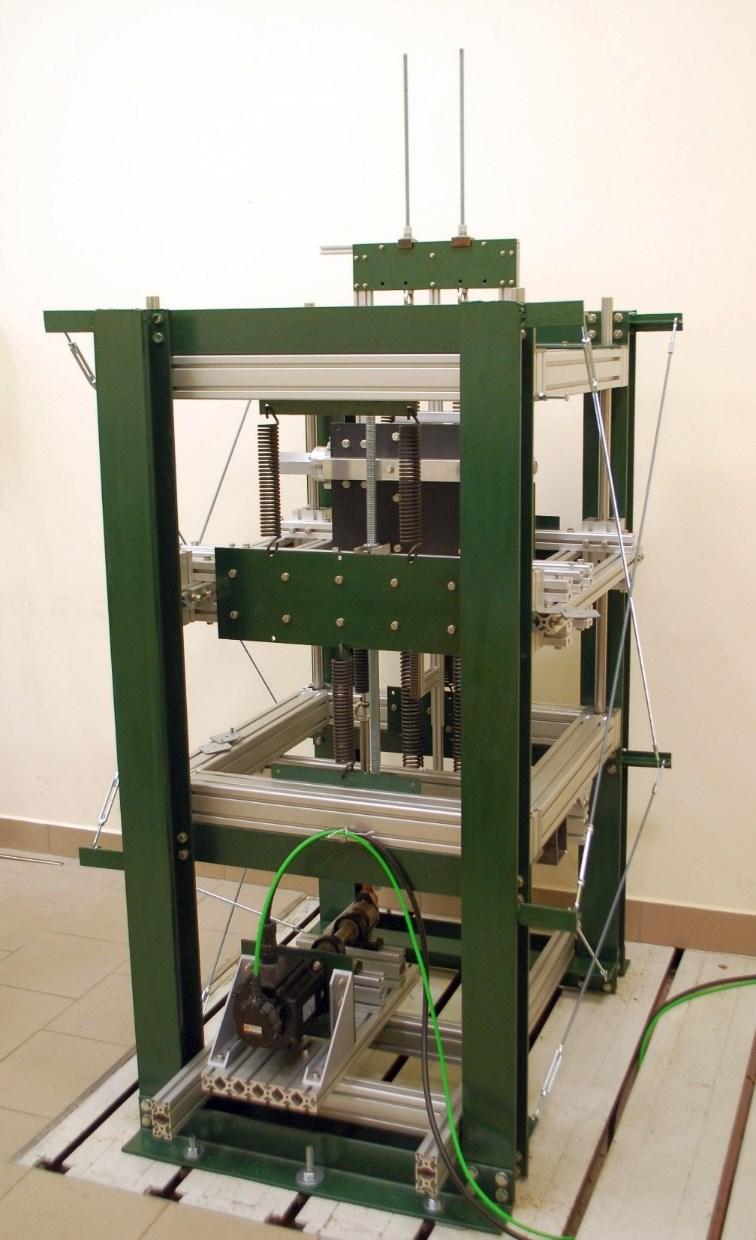
15 Urządzenie jest wyposażone w korpus 1 złożony z płyt górnej (1-p4) i dolnej (1-p3) usytuowanych poziomo, równolegle względem siebie i połączonych ze sobą dwoma płytami usytuowanymi pionowo (1-p1, 1-p2) także równolegle względem siebie. Do płyty górnej, od góry, jest przymocowany, za pomocą uchwytów, jeden koniec walcowej sprężyny 2, na której drugim końcu jest wsparty element bezwładnościowy 3 w postaci usytuowanej poziomo płyty, do której, od dołu, jest przymocowany, umieszczony wewnątrz sprężyny 3, koniec usytuowanej pionowo listwy zębatej 4. Listwa zębata 4 jest zamocowana w tulejach prowadzących 5 osadzonych między pionowymi płytami korpusu 1 i zazębia się z kołem zębatym 6 osadzonym na wale 7, ułożyskowanym w łożyskach 11 umieszczonych w pionowych płytach korpusu 1. Koniec wału 7 koła zębatego 6 jest złączony z przekładnią bezstopniową 8. Wał 7 koła zębatego stanowi wał napędowy tej przekładni. Z przekładnią bezstopniową 8 jest także złączony jeden koniec wału 10, ułożyskowanego w łożyskach umieszczonych w pionowych płytach korpusu 1. Na drugim końcu wału 10 jest osadzone koło zamachowe 9 usytuowane na zewnątrz korpusu 1. Wał 10 koła zamachowego 9 stanowi wał napędzany przekładni 8. Przekładnia bezstopniowa 8 jest umożliwia płynną zmianę jej przełożenia. Dolną płytę korpusu 1 urządzenia przymocowuje się do konstrukcji, której drgania mają być tłumione.
 7 Dodatkowe obciążenie 8 Gryf dodatkowe obciążenie 9 Sprężyny masy głównej Rysunek izometryczny (a) zdjęcie stanowiska (b).")
16 Stanowisko doświadczalne Cześć Opis 1 Stalowa konstrukcja zewnętrzna 2 System linek usztywniających konstrukcję 3a, 3b Aluminiowa konstrukcja wewnętrzna 4 Wałek prowadzący 5 Wymuszenie kinematyczne 6 Główna masa (tłumiona) 7 Dodatkowe obciążenie 8 Gryf dodatkowe obciążenie 9 Sprężyny masy głównej Rysunek izometryczny (a) zdjęcie stanowiska (b). 10 Wariator (CVT) 11 Ruchoma cześć DTD

17 DTD dynamiczny tłumik drgań Cześć Opis 12 Główny układ rolek prowadzących 13 Boczne rolki prowadzące 14 Sprężyny DTD 15 Płyty montażowe sprężyn 16 Bloki dystansujące sprężyn 17 Śruby napinające sprężyny 18 Listwa zębata Izometryczny widok DTD.

18 Inerter Cześć Opis Widok z góry. 18 Listwa zębata 19 Koło zębate
.")
19 CVT - wariator Cześć Opis 19 Koło zębate 20 Wał wejściowy 21 Łożyska w oprawie 22 Podpory łożysk 23 Płyta montażowa CVT 24 Nieruchomy wał wyjściowy 25 Podpory wału 26 Tarcze wariatora (CVT) 27 Pas 28 Sprężyna wariatora 29 Płytka oporowa sprężyny I = 1 d p 2 I 1 + r d p 2 I 2 30 Przekładnia śrubowa 31 Transporter kulowy 32 Tuleja zamknięta 33 Płyta montażowa Izometryczny widok CVT (wariatora).

20 Wymuszenie Cześć Opis 34 Serwomotor 35 Płyta montażowa serwomotoru 36 Kątownik montażowy 37 Płyta montażowa 38 Sprzęgło kłowe 39 Wał napędowy 40 Łożyska w oprawach 41 Podpory łożysk 42 Tuleja 43 Tarcza wykorbienia 44 Wał korbowy Izometryczny widok układu wymuszenia. 45 Korba 46 Tłok 47 Wałek prowadzący 48 Łożysko liniowe w oprawie 49 Płyta montażowa łożyska liniowego

21 Model stanowiska I = 1 d p 2 I 1 + r d p 2 I 2 c I = c const + c I I

22 Możliwość zmiany parametrów układu Masa główna Sztywność Masa DTD i Inerter Sztywność Masa Bezwładność koła zamachowego Przełożenie przekładni CVT Wymuszenie Częstość Amplituda
23 Identyfikacja tłumienia masy głównej Mx ሷ + 6Kx + Cx ሶ + D 2 π atan 105 x ሶ = 0 Masa oraz sztywność: M = [kg] K = 9544 [N/m] Wartość tłumienia: C = [Ns/m] D = [N] Drgania swobodne masy głównej.
24 Identyfikacja tłumienia DTD my ሷ + ky + cy ሶ + d 2 π atan 105 x ሶ = 0 Masa oraz sztywność: m = [kg] k = [N/m] Wartość tłumienia: c = [Ns/m] d = [N] Drgania swobodne DTD.
25 Identyfikacja dyssypacji energii w przekładni CVT c const + c I I = c(i) Wykorzystaliśmy do obliczenia stałej i zmiennej wartości tłumienia wartości tłumienia dla dwóch różnych inertancji (przełożeń przekładni CVT) c const + c I I a = c m1 c const + c I I b = c m2 Wartości wejściowe: c m1, c m2 [Ns/m] I a, I b [kg] Parametry identyfikowane: c const [Ns/m] c I [Ns/mkg]
26 Identyfikacja dyssypacji energii w przekładni CVT (m + I) y ሷ + ky + c(i) y ሶ + d 2 π atan 105 x ሶ = 0 Parametry: m = [kg] k = [N/m] d = [N] I a = kg Parametry identyfikowane c const [Ns/m] c I [Ns/mkg]
27 Identyfikacja dyssypacji energii w przekładni CVT (m + I) y ሷ + ky + c(i) y ሶ + d 2 π atan 105 x ሶ = 0 Parametry: m = [kg] k = [N/m] d = [N] I b = [kg] Wartości identyfikowane c const [Ns/m] c I [Ns/mkg]
28 Identyfikacja dyssypacji energii w przekładni CVT c const + c I I a = c m1 c const + c I I b = c m2 c m1 = [Ns/m] c m2 = [Ns/m] I a = kg I b = [kg] Wartość tłumienia: d = [N] c I = c const + c I I c const = [ Ns m ] c I = 0.48 [ Ns mkg ]
29 Wymuszenie Równania opisujące zmianę długości l AC : l AB cos α 1 l BC cos α 2 = 0 l AC i α 2 l AB sin α 1 l BC sin α 2 = l AC l AC = l AB sin α 1 + l BC Przybliżenie długości l AC : l AB l BC cos 2α l AB l BC Ostatecznie wymuszenie można opisać: cos 2α 1 +cos 4α 1 a t = l AC l BC
30 Porównanie przebiegów numerycznych i eksperymentalnych Porównanie przeprowadzono dla s = 250 [rpm] i dwóch wartości inertancji: I 1 = 6.36 [kg] (a) i I 2 = 12.9 [kg] (b).
31 Wyniki eksperymentalne Wykresy amplitudowo-częstotliwościowe dla 6 wartości przełożenia przekładni CVT. Powyżej wykresy podana jest wartość inertancji. Linie ciągłe uzyskano z modelu matematycznego, a kropki odpowiadają wartością pomierzonym.
32 Wyniki Wykresy amplitudowoczęstotliwościowe pokazujące redukcję amplitudy drgań DTD. Symulacja numeryczna (a); Badania eksperymentalne (b); Porównanie wyników z i bez DTD (c,d).
33 Wyniki Rozszerzenie zakresu efektywnego tłumienia może być uzyskane poprzez rozszerzenie zakresu przekładni CVT o 31%. Czarne linie zostały uzyskane numeryczne dla kolejnych wartości I. Czerwona lina odpowiada amplitudzie przy załączonym DTD. Zakreskowany obszar pokazuje zakres w którym przy obecnym zakresie przełożeń nie daje optymalnej redukcji drgań.
34 Filmy prezentujący działanie stanowiska: Pierwszy Drugi Artykuły są dostępne na stronie:
35 Wnioski Został zaprezentowany nowy dynamiczny tłumik drgań z inerterem o zmiennej bezstopniowo inertancji W badaniach numerycznych dla wszystkich wybranych wartości parametrów następuje znacząca redukcja amplitudy Zbudowano prototyp urządzenia uzyskując potwierdzenie analizy teoretycznej.
36 Bardzo dziękuję za uwagę Wniosek był finansowany w ramach projektu MNiSW Iuventus Plus nr 0352/IP2/2015/73 oraz NCN OPUS No. 2015/17/B/ST8/03325 Dziękujemy za cenną pomoc: Prof. E. Pavlovskaii (Univ. of Aberdeen), Prof. M. Wiercigrochowi (Univ. of Aberdeen) oraz dr hab. inż. Jerzemu Wojewodzie (PŁ).
PL B1. LISICKI JANUSZ ZAKŁAD PRODUKCYJNO HANDLOWO USŁUGOWY EXPORT IMPORT, Pukinin, PL BUP 17/16. JANUSZ LISICKI, Pukinin, PL
 PL 226242 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226242 (13) B1 (21) Numer zgłoszenia: 411231 (51) Int.Cl. A01D 46/26 (2006.01) A01D 46/00 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 226242 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226242 (13) B1 (21) Numer zgłoszenia: 411231 (51) Int.Cl. A01D 46/26 (2006.01) A01D 46/00 (2006.01) Urząd Patentowy Rzeczypospolitej
INSTRUKCJA DO ĆWICZENIA NR 5
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 5 PRZEDMIOT TEMAT OPRACOWAŁ MODELOWANIE UKŁADÓW MECHANICZNYCH Badania analityczne układu mechanicznego
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 5 PRZEDMIOT TEMAT OPRACOWAŁ MODELOWANIE UKŁADÓW MECHANICZNYCH Badania analityczne układu mechanicznego
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
PL B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL BUP 12/14. ANTONI SZUMANOWSKI, Warszawa, PL PAWEŁ KRAWCZYK, Ciechanów, PL
 PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 01/18. WIESŁAW FIEBIG, Wrocław, PL WUP 08/18 RZECZPOSPOLITA POLSKA
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229701 (13) B1 (21) Numer zgłoszenia: 419686 (51) Int.Cl. F16F 15/24 (2006.01) F03G 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229701 (13) B1 (21) Numer zgłoszenia: 419686 (51) Int.Cl. F16F 15/24 (2006.01) F03G 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
PL B1. POLITECHNIKA LUBELSKA, Lublin, PL UNIWERSYTET PRZYRODNICZY W LUBLINIE, Lublin, PL BUP 15/16
 PL 225230 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 225230 (13) B1 (21) Numer zgłoszenia: 410920 (51) Int.Cl. F16D 1/02 (2006.01) F16D 3/10 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 225230 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 225230 (13) B1 (21) Numer zgłoszenia: 410920 (51) Int.Cl. F16D 1/02 (2006.01) F16D 3/10 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN. Ćwiczenie D-3
 POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie D-3 Temat: Obliczenie częstotliwości własnej drgań swobodnych wrzecion obrabiarek Konsultacje: prof. dr hab. inż. F. Oryński
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie D-3 Temat: Obliczenie częstotliwości własnej drgań swobodnych wrzecion obrabiarek Konsultacje: prof. dr hab. inż. F. Oryński
(12) OPIS PATENTOWY (19) PL (11) (13)B1 PL B1. Instytut Sadownictwa i Kwiaciarstwa, Skierniewice, PL
 OPIS PATENTOWY (19) PL (11) (13)B1 PL B1. Instytut Sadownictwa i Kwiaciarstwa, Skierniewice, PL") RZECZPOSPOLITA PO LSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11)188114 (21) Numer zgłoszenia: 335915 (22) Data zgłoszenia: 08.10.1999 (13)B1 (51) IntCl7 A01D 46/26 (54)Otrząsacz
RZECZPOSPOLITA PO LSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11)188114 (21) Numer zgłoszenia: 335915 (22) Data zgłoszenia: 08.10.1999 (13)B1 (51) IntCl7 A01D 46/26 (54)Otrząsacz
Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY. 1. Cel ćwiczenia
 Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY 1. Cel ćwiczenia Przeprowadzenie izolacji drgań przekładni zębatej oraz doświadczalne wyznaczenie współczynnika przenoszenia drgań urządzenia na fundament.. Wprowadzenie
Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY 1. Cel ćwiczenia Przeprowadzenie izolacji drgań przekładni zębatej oraz doświadczalne wyznaczenie współczynnika przenoszenia drgań urządzenia na fundament.. Wprowadzenie
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
(13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1. Fig. 1 F16H 1/22 B63H 3/02 F01D 7/02. (73) Uprawniony z patentu:
 B1 (12) OPIS PATENTOWY (19) PL (11) PL B1. Fig. 1 F16H 1/22 B63H 3/02 F01D 7/02. (73) Uprawniony z patentu:") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 184780 (13) B1 (2 1) Numer zgłoszenia: 323265 (22) Data zgłoszenia: 19.11.1997 (51) IntCl7 F16H 1/22 B63H
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 184780 (13) B1 (2 1) Numer zgłoszenia: 323265 (22) Data zgłoszenia: 19.11.1997 (51) IntCl7 F16H 1/22 B63H
Laboratorium Mechaniki Technicznej
 Laboratorium Mechaniki Technicznej Ćwiczenie nr 5 Badanie drgań liniowych układu o jednym stopniu swobody Katedra Automatyki, Biomechaniki i Mechatroniki 90-924 Łódź, ul. Stefanowskiego 1/15, budynek A22
Laboratorium Mechaniki Technicznej Ćwiczenie nr 5 Badanie drgań liniowych układu o jednym stopniu swobody Katedra Automatyki, Biomechaniki i Mechatroniki 90-924 Łódź, ul. Stefanowskiego 1/15, budynek A22
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 03/08. BOGDAN BRANOWSKI, Poznań, PL JAROSŁAW FEDORCZUK, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
(12) OPIS PATENTOWY. (54)Uniwersalny moduł obrotowo-podziałowy
 OPIS PATENTOWY. (54)Uniwersalny moduł obrotowo-podziałowy") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160463 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 283098 (22) Data zgłoszenia: 28.12.1989 B23Q (51)IntCl5: 16/06 (54)Uniwersalny
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160463 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 283098 (22) Data zgłoszenia: 28.12.1989 B23Q (51)IntCl5: 16/06 (54)Uniwersalny
(R) przy obciążaniu (etap I) Wyznaczanie przemieszczenia kątowego V 2
 przy obciążaniu (etap I) Wyznaczanie przemieszczenia kątowego V 2") SPIS TREŚCI Przedmowa... 10 1. Tłumienie drgań w układach mechanicznych przez tłumiki tarciowe... 11 1.1. Wstęp... 11 1.2. Określenie modelu tłumika ciernego drgań skrętnych... 16 1.3. Wyznaczanie rozkładu
SPIS TREŚCI Przedmowa... 10 1. Tłumienie drgań w układach mechanicznych przez tłumiki tarciowe... 11 1.1. Wstęp... 11 1.2. Określenie modelu tłumika ciernego drgań skrętnych... 16 1.3. Wyznaczanie rozkładu
(12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1
 OPIS PATENTOWY (19) PL (11) 174940 (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 305007 (22) Data zgłoszenia: 12.09.1994 (51) IntCl6: B25J 9/06 B25J
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 305007 (22) Data zgłoszenia: 12.09.1994 (51) IntCl6: B25J 9/06 B25J
PL B1. Głowica pomiarowa do badania charakterystyk tribologicznych i szczelności ślizgowych uszczelnień czołowych
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)196330 (13) B1 (21) Numer zgłoszenia: 343384 (51) Int.Cl. G01N 3/56 (2006.01) G01M 3/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)196330 (13) B1 (21) Numer zgłoszenia: 343384 (51) Int.Cl. G01N 3/56 (2006.01) G01M 3/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
WZORU UŻYTKOWEGO PL Y1. KOPEX MACHINERY SPÓŁKA AKCYJNA, Zabrze, PL BUP 25/12
 PL 66689 Y1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 120040 (22) Data zgłoszenia: 23.05.2011 (19) PL (11) 66689 (13) Y1
PL 66689 Y1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 120040 (22) Data zgłoszenia: 23.05.2011 (19) PL (11) 66689 (13) Y1
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej
 MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
RZECZPOSPOLITA OPIS PATENTOWY
 RZECZPOSPOLITA OPIS PATENTOWY 152 047 POLSKA Patent dodatkowy do patentu nr Zgłoszono: 86 06 23 (P.260223) Int. Cl.5 B02C 19/16 URZĄD PATENTOWY RP Pierwszeństwo Zgłoszenie ogłoszono: 88 05 26 Opis patentowy
RZECZPOSPOLITA OPIS PATENTOWY 152 047 POLSKA Patent dodatkowy do patentu nr Zgłoszono: 86 06 23 (P.260223) Int. Cl.5 B02C 19/16 URZĄD PATENTOWY RP Pierwszeństwo Zgłoszenie ogłoszono: 88 05 26 Opis patentowy
WZORU UŻYTKOWEGO (,9,PL <1» 63238
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Rys Model układu
 Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
PL B1. POLITECHNIKA LUBELSKA, Lublin, PL BUP 10/13. JANUSZ TOMCZAK, Lublin, PL ZBIGNIEW PATER, Turka, PL
 PL 221916 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221916 (13) B1 (21) Numer zgłoszenia: 396852 (51) Int.Cl. B21B 13/18 (2006.01) B21B 21/00 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 221916 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221916 (13) B1 (21) Numer zgłoszenia: 396852 (51) Int.Cl. B21B 13/18 (2006.01) B21B 21/00 (2006.01) Urząd Patentowy Rzeczypospolitej
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
(57) 1. Zespół napędowy do maszyny produkującej (12) OPIS PATENTOWY (19)PL (11) (13) B1 PL B1 A23G 7/00 A23G 9/04
 1. Zespół napędowy do maszyny produkującej (12) OPIS PATENTOWY (19)PL (11) (13) B1 PL B1 A23G 7/00 A23G 9/04") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)168518 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 293225 (22) Data zgłoszenia: 17.01.1992 (51)In tc l6: A23G 9/04 A23G
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)168518 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 293225 (22) Data zgłoszenia: 17.01.1992 (51)In tc l6: A23G 9/04 A23G
(12) OPIS PATENTOWY (19) PL
 OPIS PATENTOWY (19) PL") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (21) Numer zgłoszenia: 284568 IntC l5: B66D 1/08 ( 5 1 ) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 30. 03. 1990 (54) Kołowrót linowy
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (21) Numer zgłoszenia: 284568 IntC l5: B66D 1/08 ( 5 1 ) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 30. 03. 1990 (54) Kołowrót linowy
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 179279 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 312589 (22) Data zgłoszenia: 30.01.1996 (51) IntCl7. B21B 31/24 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 179279 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 312589 (22) Data zgłoszenia: 30.01.1996 (51) IntCl7. B21B 31/24 (54)
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
MECHANIKA II. Drgania wymuszone
 MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny Daniel Lewandowski (I-19) MECHANIKA II. Drgania wymuszone 1 / 30 Układ drgajacy o jednym stopniu swobody
MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny Daniel Lewandowski (I-19) MECHANIKA II. Drgania wymuszone 1 / 30 Układ drgajacy o jednym stopniu swobody
PL B1. Sposób i urządzenie do zaciskania tulei na linach stalowych metodą walcowania wzdłużnego, bruzdowego. POLITECHNIKA LUBELSKA, Lublin, PL
 PL 219955 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219955 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 392946 (22) Data zgłoszenia: 15.11.2010 (51) Int.Cl.
PL 219955 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219955 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 392946 (22) Data zgłoszenia: 15.11.2010 (51) Int.Cl.
(57) pem usytuowany spalinowy silnik napędowy sprzęgnięty z zespołem zrębkującym (12) OPIS PATENTOWY (19) PL (11) PL B1 (13) B1
 pem usytuowany spalinowy silnik napędowy sprzęgnięty z zespołem zrębkującym (12) OPIS PATENTOWY (19) PL (11) PL B1 (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174347 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306322 (22) Data zgłoszenia: 14.12.1994 (51) IntCl6: B27L 11/00 A01G
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174347 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306322 (22) Data zgłoszenia: 14.12.1994 (51) IntCl6: B27L 11/00 A01G
O 2 O 1. Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
 msg M 7-1 - Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Zagadnienia: prawa dynamiki Newtona, moment sił, moment bezwładności, dynamiczne równania ruchu wahadła fizycznego,
msg M 7-1 - Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Zagadnienia: prawa dynamiki Newtona, moment sił, moment bezwładności, dynamiczne równania ruchu wahadła fizycznego,
(57) nych zabudowanych osłonami, transporterów podpartych w środkowych (13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1
 nych zabudowanych osłonami, transporterów podpartych w środkowych (13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180305 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 312853 (22) Data zgłoszenia: 16.02.1996 (51) Int.Cl.7: A21C 3/02 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180305 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 312853 (22) Data zgłoszenia: 16.02.1996 (51) Int.Cl.7: A21C 3/02 (54)
PL B1. RYBNICKA FABRYKA MASZYN RYFAMA SPÓŁKA AKCYJNA, Rybnik, PL BUP 06/08
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209268 (13) B1 (21) Numer zgłoszenia: 380539 (51) Int.Cl. B02C 4/42 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.09.2006
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209268 (13) B1 (21) Numer zgłoszenia: 380539 (51) Int.Cl. B02C 4/42 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.09.2006
PL B BUP 23/11
 PL 218230 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218230 (13) B1 (21) Numer zgłoszenia: 391114 (51) Int.Cl. B65G 23/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 218230 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218230 (13) B1 (21) Numer zgłoszenia: 391114 (51) Int.Cl. B65G 23/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL B1. Manipulacyjne zawiesie dźwignicy do transportu wydrążonych elementów cylindrycznych, zwłaszcza kręgów blach
 PL 221201 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221201 (13) B1 (21) Numer zgłoszenia: 401569 (51) Int.Cl. B66C 1/48 (2006.01) B21C 47/24 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 221201 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221201 (13) B1 (21) Numer zgłoszenia: 401569 (51) Int.Cl. B66C 1/48 (2006.01) B21C 47/24 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
WYKAZ TEMATÓW Z LABORATORIUM DRGAŃ MECHANICZNYCH dla studentów semestru IV WM
 WYKAZ TEMATÓW Z LABORATORIUM DRGAŃ MECHANICZNYCH dla studentów semestru IV WM 1. Wprowadzenie do zajęć. Równania Lagrange'a II rodzaju Ćwiczenie wykonywane na podstawie rozdziału 3 [1] 2. Drgania swobodne
WYKAZ TEMATÓW Z LABORATORIUM DRGAŃ MECHANICZNYCH dla studentów semestru IV WM 1. Wprowadzenie do zajęć. Równania Lagrange'a II rodzaju Ćwiczenie wykonywane na podstawie rozdziału 3 [1] 2. Drgania swobodne
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 2241785. (96) Data i numer zgłoszenia patentu europejskiego: 02.10.2008 08872337.
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 2241785. (96) Data i numer zgłoszenia patentu europejskiego: 02.10.2008 08872337.") RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 224178 (96) Data i numer zgłoszenia patentu europejskiego: 02..08 08872337.4 (13) (1) T3 Int.Cl. F16H 33/ (06.01) F03G 3/00
RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 224178 (96) Data i numer zgłoszenia patentu europejskiego: 02..08 08872337.4 (13) (1) T3 Int.Cl. F16H 33/ (06.01) F03G 3/00
(13) B1 (12) OPIS PATENTOWY (19)PL (11) PL B1. (21) Numer zgłoszenia: RZECZPOSPOLITA POLSKA. (51) IntCl6: Ä47J 43/07 A47J 44/00
 B1 (12) OPIS PATENTOWY (19)PL (11) PL B1. (21) Numer zgłoszenia: RZECZPOSPOLITA POLSKA. (51) IntCl6: Ä47J 43/07 A47J 44/00") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)176030 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 307407 Data zgłoszenia: 20.02.1995 (51) IntCl6: Ä47J 43/07 A47J 44/00
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)176030 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 307407 Data zgłoszenia: 20.02.1995 (51) IntCl6: Ä47J 43/07 A47J 44/00
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 186864 (21) Numer zgłoszenia: 326088 (22) Data zgłoszenia: 28.04.1998 (13) B1 (51) IntCl7 F03D 3/02 (54)
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 186864 (21) Numer zgłoszenia: 326088 (22) Data zgłoszenia: 28.04.1998 (13) B1 (51) IntCl7 F03D 3/02 (54)
Badania doświadczalne drgań własnych nietłumionych i tłumionych
 Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny Politechnika Śląska www.imio.polsl.pl fb.com/imiopolsl twitter.com/imiopolsl LABORATORIUM WYTRZYMAŁOŚCI MATERIAŁÓW Badania
Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny Politechnika Śląska www.imio.polsl.pl fb.com/imiopolsl twitter.com/imiopolsl LABORATORIUM WYTRZYMAŁOŚCI MATERIAŁÓW Badania
(13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 B23K 7/10 RZECZPOSPOLITA POLSKA. Urząd Patentowy Rzeczypospolitej Polskiej
 B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 B23K 7/10 RZECZPOSPOLITA POLSKA. Urząd Patentowy Rzeczypospolitej Polskiej") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175070 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306629 Data zgłoszenia: 29.12.1994 (51) IntCl6: B23K 7/10 (54) Przecinarka
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175070 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306629 Data zgłoszenia: 29.12.1994 (51) IntCl6: B23K 7/10 (54) Przecinarka
Drgania. O. Harmoniczny
 Dobrej fazy! Drgania O. Harmoniczny Położenie równowagi, 5 lipca 218 r. 1 Zadanie Zegar Małgorzata Berajter, update: 217-9-6, id: pl-ciepło-5, diff: 2 Pewien zegar, posiadający wahadło ze srebra, odmierza
Dobrej fazy! Drgania O. Harmoniczny Położenie równowagi, 5 lipca 218 r. 1 Zadanie Zegar Małgorzata Berajter, update: 217-9-6, id: pl-ciepło-5, diff: 2 Pewien zegar, posiadający wahadło ze srebra, odmierza
PL B1. ANIOŁ KAZIMIERZ PRZEDSIĘBIORSTWO PRODUKCYJNO-USŁUGOWO-HANDLOWE AKPIL, Pilzno, PL BUP 25/
 PL 212465 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212465 (13) B1 (21) Numer zgłoszenia: 379844 (51) Int.Cl. E01H 5/09 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 212465 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212465 (13) B1 (21) Numer zgłoszenia: 379844 (51) Int.Cl. E01H 5/09 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL B1. MAGNETO SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Częstochowa, PL BUP 10/12
 PL 220740 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220740 (13) B1 (21) Numer zgłoszenia: 396093 (51) Int.Cl. B21D 28/14 (2006.01) B26F 1/44 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 220740 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220740 (13) B1 (21) Numer zgłoszenia: 396093 (51) Int.Cl. B21D 28/14 (2006.01) B26F 1/44 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 14/14. BARTOSZ WIECZOREK, Poznań, PL MAREK ZABŁOCKI, Poznań, PL
 PL 223141 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223141 (13) B1 (21) Numer zgłoszenia: 402276 (51) Int.Cl. B62M 1/14 (2006.01) A61G 5/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223141 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223141 (13) B1 (21) Numer zgłoszenia: 402276 (51) Int.Cl. B62M 1/14 (2006.01) A61G 5/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Zwolnice przekładnie boczne
 Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
PL 210006 B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL
 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 210006 (21) Numer zgłoszenia: 380722 (22) Data zgłoszenia: 01.10.2006 (13) B1 (51) Int.Cl. A61G 5/02 (2006.01)
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 210006 (21) Numer zgłoszenia: 380722 (22) Data zgłoszenia: 01.10.2006 (13) B1 (51) Int.Cl. A61G 5/02 (2006.01)
PL B BUP 17/16. JAN HOLNICKI-SZULC, Warszawa, PL ARKADIUSZ MRÓZ, Kraków, PL RAMI FARAJ, Warszawa, PL
 PL 227058 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227058 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 411237 (22) Data zgłoszenia: 11.02.2015 (51) Int.Cl.
PL 227058 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227058 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 411237 (22) Data zgłoszenia: 11.02.2015 (51) Int.Cl.
INSTRUKCJA DO ĆWICZENIA NR 4
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 4 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA UKŁADÓW MECHANCZNYCH Modelowanie fizyczne układu o dwóch stopniach
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 4 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA UKŁADÓW MECHANCZNYCH Modelowanie fizyczne układu o dwóch stopniach
(12) OPIS PATENTOW Y (19) PL (11)
 OPIS PATENTOW Y (19) PL (11)") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOW Y (19) PL (11) 177094 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (2 1 ) Numer zgłoszenia: 307997 (22) Data zgłoszenia: 03.04.1995 (51) IntCl6: A01D 34/07
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOW Y (19) PL (11) 177094 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (2 1 ) Numer zgłoszenia: 307997 (22) Data zgłoszenia: 03.04.1995 (51) IntCl6: A01D 34/07
Teoria maszyn mechanizmów
 Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Moment obrotowy i moc silnika a jego obciążenie (3)
") Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Matematyczny opis układu napędowego pojazdu szynowego
 GRZESIKIEWICZ Wiesław 1 LEWANDOWSKI Mirosław 2 Matematyczny opis układu napędowego pojazdu szynowego WPROWADZENIE Rozważmy model układu napędowego pojazdu szynowego. Model ten dotyczy napędu jednej osi
GRZESIKIEWICZ Wiesław 1 LEWANDOWSKI Mirosław 2 Matematyczny opis układu napędowego pojazdu szynowego WPROWADZENIE Rozważmy model układu napędowego pojazdu szynowego. Model ten dotyczy napędu jednej osi
Ćwiczenie nr X ANALIZA DRGAŃ SAMOWZBUDNYCH TYPU TARCIOWEGO
 Ćwiczenie nr X ANALIZA DRGAŃ SAMOWZBUDNYCH TYPU TARCIOWEGO Celem ćwiczenia jest zbadanie zachowania układu oscylatora harmonicznego na taśmociągu w programie napisanym w środowisku Matlab, dla następujących
Ćwiczenie nr X ANALIZA DRGAŃ SAMOWZBUDNYCH TYPU TARCIOWEGO Celem ćwiczenia jest zbadanie zachowania układu oscylatora harmonicznego na taśmociągu w programie napisanym w środowisku Matlab, dla następujących
Równania różniczkowe opisujące ruch fotela z pilotem:
 . Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
. Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 14/14. BARTOSZ WIECZOREK, Poznań, PL MAREK ZABŁOCKI, Poznań, PL
 PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
PL B1. FILA ANTONI POLSKA FABRYKA WODOMIERZY I CIEPŁOMIERZY FILA, Sztum, PL BUP 25/ WUP 07/12. ANTONI FILA, Czernin, PL
 PL 211989 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211989 (13) B1 (21) Numer zgłoszenia: 382543 (51) Int.Cl. G01F 1/06 (2006.01) G01F 15/07 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 211989 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211989 (13) B1 (21) Numer zgłoszenia: 382543 (51) Int.Cl. G01F 1/06 (2006.01) G01F 15/07 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL B1. NOWAK ANDRZEJ, Terebiń, PL BUP 17/16. ANDRZEJ NOWAK, Terebiń, PL WUP 12/17. rzecz. pat.
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227579 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 415255 (22) Data zgłoszenia: 11.12.2015 (51) Int.Cl. E21B 7/02 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227579 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 415255 (22) Data zgłoszenia: 11.12.2015 (51) Int.Cl. E21B 7/02 (2006.01)
PL B1. POLITECHNIKA ŚLĄSKA, Gliwice, PL
 PL 214302 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 214302 (21) Numer zgłoszenia: 379747 (22) Data zgłoszenia: 22.05.2006 (13) B1 (51) Int.Cl.
PL 214302 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 214302 (21) Numer zgłoszenia: 379747 (22) Data zgłoszenia: 22.05.2006 (13) B1 (51) Int.Cl.
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 21/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
PL B1. PRZEDSIĘBIORSTWO HAK SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Wrocław, PL BUP 20/14. JACEK RADOMSKI, Wrocław, PL
 PL 224252 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224252 (13) B1 (21) Numer zgłoszenia: 403166 (51) Int.Cl. B66C 13/08 (2006.01) H02K 7/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 224252 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224252 (13) B1 (21) Numer zgłoszenia: 403166 (51) Int.Cl. B66C 13/08 (2006.01) H02K 7/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
(73) Uprawniony z patentu:
 Uprawniony z patentu:") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 182357 (13) B1 (21 ) Numer zgłoszenia: 318667 (51) IntCl7 A61G 3/06 (22) Data zgłoszenia: 26.02.1997 A61G
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 182357 (13) B1 (21 ) Numer zgłoszenia: 318667 (51) IntCl7 A61G 3/06 (22) Data zgłoszenia: 26.02.1997 A61G
(13) B1 PL B1. (21) Numer zgłoszenia: (51) IntCl7 B03C 3/76. (54) Urządzenie do strzepywania elektrod ulotowych elektrofiltra
 B1 PL B1. (21) Numer zgłoszenia: (51) IntCl7 B03C 3/76. (54) Urządzenie do strzepywania elektrod ulotowych elektrofiltra") RZECZPOSPOLITA (1 2) OPIS PATENTOWY (19) PL (11) 182674 POLSKA (13) B1 (21) Numer zgłoszenia: 319886 (51) IntCl7 B03C 3/76 Urząd Patentowy (22) Data zgłoszenia: 07.05.1997 B01D 35/16 Rzeczypospolitej Polskiej
RZECZPOSPOLITA (1 2) OPIS PATENTOWY (19) PL (11) 182674 POLSKA (13) B1 (21) Numer zgłoszenia: 319886 (51) IntCl7 B03C 3/76 Urząd Patentowy (22) Data zgłoszenia: 07.05.1997 B01D 35/16 Rzeczypospolitej Polskiej
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 19/10
 PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
a, F Włodzimierz Wolczyński sin wychylenie cos cos prędkość sin sin przyspieszenie sin sin siła współczynnik sprężystości energia potencjalna
 Włodzimierz Wolczyński 3 RUCH DRGAJĄCY. CZĘŚĆ 1 wychylenie sin prędkość cos cos przyspieszenie sin sin siła współczynnik sprężystości sin sin 4 3 1 - x. v ; a ; F v -1,5T,5 T,75 T T 8t x -3-4 a, F energia
Włodzimierz Wolczyński 3 RUCH DRGAJĄCY. CZĘŚĆ 1 wychylenie sin prędkość cos cos przyspieszenie sin sin siła współczynnik sprężystości sin sin 4 3 1 - x. v ; a ; F v -1,5T,5 T,75 T T 8t x -3-4 a, F energia
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Drgania układu o wielu stopniach swobody
 Drgania układu o wielu stopniach swobody Rozpatrzmy układ składający się z n ciał o masach m i (i =,,..., n, połączonych między sobą i z nieruchomym podłożem za pomocą elementów sprężystych o współczynnikach
Drgania układu o wielu stopniach swobody Rozpatrzmy układ składający się z n ciał o masach m i (i =,,..., n, połączonych między sobą i z nieruchomym podłożem za pomocą elementów sprężystych o współczynnikach
(96) Data i numer zgłoszenia patentu europejskiego:
 Data i numer zgłoszenia patentu europejskiego:") RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1557329 (96) Data i numer zgłoszenia patentu europejskiego: 03.11.2004 04026048.1 (13) T3 (51) Int. Cl. B60S9/08 (2006.01)
RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1557329 (96) Data i numer zgłoszenia patentu europejskiego: 03.11.2004 04026048.1 (13) T3 (51) Int. Cl. B60S9/08 (2006.01)
MECHANIKA II. Drgania wymuszone
 MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA II. Drgania wymuszone Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA 2. Drgania punktu materialnego. Wykład Nr 8. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 8 Drgania punktu materialnego Prowadzący: dr Krzysztof Polko Wstęp Drgania Okresowe i nieokresowe Swobodne i wymuszone Tłumione i nietłumione Wstęp Drgania okresowe ruch powtarzający
MECHANIKA 2 Wykład Nr 8 Drgania punktu materialnego Prowadzący: dr Krzysztof Polko Wstęp Drgania Okresowe i nieokresowe Swobodne i wymuszone Tłumione i nietłumione Wstęp Drgania okresowe ruch powtarzający
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/16
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
Z-ETI-1027 Mechanika techniczna II Technical mechanics II. Stacjonarne. Katedra Inżynierii Produkcji Dr inż. Stanisław Wójcik
 Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Z-ETI-1027 Mechanika
Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Z-ETI-1027 Mechanika
m OPIS OCHRONNY PL 59825
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA m OPIS OCHRONNY PL 59825 WZORU UŻYTKOWEGO u) Y1 (21) Numer zgłoszenia: 108523 51) Intel7: Urząd Patentowy Rzeczypospolitej Polskiej @ Data zgłoszenia: 19.08.1998
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA m OPIS OCHRONNY PL 59825 WZORU UŻYTKOWEGO u) Y1 (21) Numer zgłoszenia: 108523 51) Intel7: Urząd Patentowy Rzeczypospolitej Polskiej @ Data zgłoszenia: 19.08.1998
PL B1. PISKORZ WALDEMAR, Kodeń, PL PISKORZ TOMASZ TADEUSZ, Kodeń, PL PISKORZ IRENEUSZ, Kodeń, PL BUP 16/16
 PL 225300 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 225300 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 411022 (22) Data zgłoszenia: 22.01.2015 (51) Int.Cl.
PL 225300 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 225300 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 411022 (22) Data zgłoszenia: 22.01.2015 (51) Int.Cl.
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
PL B1. Walcarka ramowo-konsolowa, zwłaszcza do walcowania wzdłużnego wyrobów płaskich oraz kształtowych. POLITECHNIKA LUBELSKA, Lublin, PL
 PL 221074 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221074 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 396594 (22) Data zgłoszenia: 10.10.2011 (51) Int.Cl.
PL 221074 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221074 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 396594 (22) Data zgłoszenia: 10.10.2011 (51) Int.Cl.
INSTRUKCJA DO ĆWICZENIA NR 2. Analiza kinematyczna napędu z przekładniami
 INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
WZORU UŻYTKOWEGO. d2)opis OCHRONNY (19) PL (11)62537 EGZEMPLARZ ARCHIWALNY. Litwin Stanisław, Przybysławice, PL A45B 19/10 (2006.
opis OCHRONNY (19) PL (11)62537 EGZEMPLARZ ARCHIWALNY. Litwin Stanisław, Przybysławice, PL A45B 19/10 (2006.") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej d2)opis OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 113748 (22) Data zgłoszenia: 13.12.2002 EGZEMPLARZ ARCHIWALNY (19) PL (11)62537
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej d2)opis OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 113748 (22) Data zgłoszenia: 13.12.2002 EGZEMPLARZ ARCHIWALNY (19) PL (11)62537
PL B1. KRUCZEK MAREK, Dębica, PL BUP 21/07. WIESŁAW GALEND, Tarnobrzeg, PL GUSTAW JADCZYK, Koniecpol, PL MAREK KRUCZEK, Dębica, PL
 PL 212309 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212309 (13) B1 (21) Numer zgłoszenia: 379363 (51) Int.Cl. B62M 7/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 212309 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212309 (13) B1 (21) Numer zgłoszenia: 379363 (51) Int.Cl. B62M 7/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
PL B1. OSTROWSKI LESZEK, Gdańsk-Wrzeszcz, PL OSTROWSKI STANISŁAW, Gdańsk-Wrzeszcz, PL BUP 26/10
 PL 213042 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213042 (13) B1 (21) Numer zgłoszenia: 388240 (51) Int.Cl. F02D 15/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 213042 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213042 (13) B1 (21) Numer zgłoszenia: 388240 (51) Int.Cl. F02D 15/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
WZORU UŻYTKOWEGO q Y1 UlJ Numer zgłoszenia: s~\ t f i7.
 RZECZPOSPOLITA POLSKA OPIS OCHRONNY PL 60914 WZORU UŻYTKOWEGO q Y1 UlJ Numer zgłoszenia: 111026 s~\ t f i7. Urząd Patentowy Rzeczypospolitej Polskiej @ Data zgłoszenia: 30.05.2000 EGZEMPLARZ ARCHIWALNY
RZECZPOSPOLITA POLSKA OPIS OCHRONNY PL 60914 WZORU UŻYTKOWEGO q Y1 UlJ Numer zgłoszenia: 111026 s~\ t f i7. Urząd Patentowy Rzeczypospolitej Polskiej @ Data zgłoszenia: 30.05.2000 EGZEMPLARZ ARCHIWALNY
Seria 6100. Prowadnice siłownika zaprojektowano w dwóch wersjach:
 Seria 600 mocowanie górne przyłącza górne rowek pod czujnik mocowanie boczne alternatywne przyłącza boczne (zakorkowane) mocowanie dolne rowek kształtu T do mocowania dolnego rowek pod czujnik Siłowniki
Seria 600 mocowanie górne przyłącza górne rowek pod czujnik mocowanie boczne alternatywne przyłącza boczne (zakorkowane) mocowanie dolne rowek kształtu T do mocowania dolnego rowek pod czujnik Siłowniki
WZORU UŻYTKOWEGO PL Y1 B62K 5/04 ( ) Gębski Paweł, Warszawa, PL BUP 17/08. Paweł Gębski, Warszawa, PL
 Gębski Paweł, Warszawa, PL BUP 17/08. Paweł Gębski, Warszawa, PL") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 116619 (22) Data zgłoszenia: 07.02.2007 (19) PL (11) 64368 (13) Y1 (51) Int.Cl.
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 116619 (22) Data zgłoszenia: 07.02.2007 (19) PL (11) 64368 (13) Y1 (51) Int.Cl.
WZORU UŻYTKOWEGO. d9) PL (id63499 EGZEMPLARZ ARCHIWALNY A01B 39/00 ( ) A01B 33/00 ( ) (22) Data zgłoszenia:
 PL (id63499 EGZEMPLARZ ARCHIWALNY A01B 39/00 ( ) A01B 33/00 ( ) (22) Data zgłoszenia:") RZECZPOSPOLITA POLSKA \&7 Urząd Patentowy Rzeczypospolitej Polskiej d2) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 115462 (22) Data zgłoszenia: 09.05.2005 EGZEMPLARZ ARCHIWALNY d9) PL (id63499
RZECZPOSPOLITA POLSKA \&7 Urząd Patentowy Rzeczypospolitej Polskiej d2) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 115462 (22) Data zgłoszenia: 09.05.2005 EGZEMPLARZ ARCHIWALNY d9) PL (id63499
PL B1. Urządzenie do walcowania poprzecznego, trójwalcowego odkuwek z regulowanym rozstawem osi. POLITECHNIKA LUBELSKA, Lublin, PL
 PL 218845 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218845 (13) B1 (21) Numer zgłoszenia: 394506 (51) Int.Cl. B21B 13/08 (2006.01) B21B 37/58 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 218845 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218845 (13) B1 (21) Numer zgłoszenia: 394506 (51) Int.Cl. B21B 13/08 (2006.01) B21B 37/58 (2006.01) Urząd Patentowy Rzeczypospolitej
(19) PL (n)63376 (2)OPIS OCHRONNY WZORU UŻYTKOWEGO EGZEMPLARZ ARCHIWALNY. (21) Numer zgłoszenia: A01D 13/00 ( )
 PL (n)63376 (2)OPIS OCHRONNY WZORU UŻYTKOWEGO EGZEMPLARZ ARCHIWALNY. (21) Numer zgłoszenia: A01D 13/00 ( )") RZECZPOSPOLITA POLSKA (2)OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 115223 EGZEMPLARZ ARCHIWALNY (19) PL (n)63376 (13) Y1 (51) Int.CI. A01D 13/00 (2006.01) Urząd Patentowy (22) Data zgłoszenia:
RZECZPOSPOLITA POLSKA (2)OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 115223 EGZEMPLARZ ARCHIWALNY (19) PL (n)63376 (13) Y1 (51) Int.CI. A01D 13/00 (2006.01) Urząd Patentowy (22) Data zgłoszenia:
Siła sprężystości - przypomnienie
 Siła sprężystości - przypomnienie Pomiary siły sprężystości wykonane kilka wykładów wcześniej (z uwzględnieniem kierunku siły). F = kx = 0.13x 0 F x cm mg Prawo Hooke a Ciało m na idealnie gładkiej powierzchni
Siła sprężystości - przypomnienie Pomiary siły sprężystości wykonane kilka wykładów wcześniej (z uwzględnieniem kierunku siły). F = kx = 0.13x 0 F x cm mg Prawo Hooke a Ciało m na idealnie gładkiej powierzchni
(19) PL (11) (13) B2 (12) OPIS PATENTOWY PL B2 B23C 3/02. (57) 1. Przyrząd mocująco-centrujący na frezarkonakiełczarkę,
 PL (11) (13) B2 (12) OPIS PATENTOWY PL B2 B23C 3/02. (57) 1. Przyrząd mocująco-centrujący na frezarkonakiełczarkę,") RZECZPO SPO LITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (21) Numer zgłoszenia: 284148 (22) Data zgłoszenia: 03.03.1990 (19) PL (11) 161879 (13) B2 (51) IntCl5: B23C 3/02 (54)
RZECZPO SPO LITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (21) Numer zgłoszenia: 284148 (22) Data zgłoszenia: 03.03.1990 (19) PL (11) 161879 (13) B2 (51) IntCl5: B23C 3/02 (54)
(12) OPIS PATENTOWY (19)PL (11)182858
 OPIS PATENTOWY (19)PL (11)182858") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)182858 (21) Numer zgłoszenia. 319132 Urząd Patentowy zgłoszenia. 2 0.0 3.1 9 9 7 Rzeczypospolitej Polskiej (51) IntCl7 B62K 5/02 (54) Rower trójkołowy
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)182858 (21) Numer zgłoszenia. 319132 Urząd Patentowy zgłoszenia. 2 0.0 3.1 9 9 7 Rzeczypospolitej Polskiej (51) IntCl7 B62K 5/02 (54) Rower trójkołowy
(13) B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL
 B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
WIBROIZOLACJA określanie właściwości wibroizolacyjnych materiałów
 LABORATORIUM WIBROAUSTYI MASZYN Wydział Budowy Maszyn i Zarządzania Instytut Mechaniki Stosowanej Zakład Wibroakustyki i Bio-Dynamiki Systemów Ćwiczenie nr WIBROIZOLACJA określanie właściwości wibroizolacyjnych
LABORATORIUM WIBROAUSTYI MASZYN Wydział Budowy Maszyn i Zarządzania Instytut Mechaniki Stosowanej Zakład Wibroakustyki i Bio-Dynamiki Systemów Ćwiczenie nr WIBROIZOLACJA określanie właściwości wibroizolacyjnych