SPIS TREŚCI. 1. Marian PA SK O: Wąskopasmowy filtr RC-GIC zawierajęcy okresowo sterowane parametry... 5
|
|
|
- Bronisława Bednarska
- 6 lat temu
- Przeglądów:
Transkrypt



1 SPIS TREŚCI 1. Marian PA SK O: Wąskopasmowy filtr RC-GIC zawierajęcy okresowo sterowane parametry Marian PASKO: Wszechprzepustowy filtr drugiego rzędu z wykorzystaniem filtru środkowoprzepustowego z parametrami sterowanymi okresowo Marian PASKO, Lesław TOPÓR-KAMIŃSKI: Filtr aktywny RC o strukturze równoległej przełęczanej Zygmunt GARCZARCZYK: Analiza numeryczna pewnej klasy nieliniowych obwodów rezystancyjnych Stanisław FRYCZ, Lesław TOPÓR-KAMIŃSKI: Przełęcznikowo-kondensatorowy układ mnożęcy Lesław TOPÓR-KAMIŃSKI: Połęczenie elementów osobliwych z dwójnikemi klasycznymi San CHOOCAN: Obliczanie wrażliwości wyższych rzędów i ich zastosowanie ' Andrzej DRYGA3Ł0: Dyskretne dladyczne układy liniowe Piotr PACANOWSKI: Dyskretna reprezentacja układów w oparciu o algebry Banacha Tadeusz GLINKA: Silnik pi ezoelektryczny Krzysztof KLUSZCZYŃSKI: Harmoniczne przestrzenne przepływu w maszynach asynchronicznych Roman MIKSIEWICZ: Silnik Jednofazowy o dziewięciu układach połęczeó uzwojeń stojana Aleksander FR CH0WICZ: Metodyka identyfikacji parametrów modelu matematycznego układu elektromaszynowego na podstawie Jego charakterystyki częstotliwościowej Maciej SIWCZYŃSKI, Zuzanna SIWCZYŃSKA: Równania funkcyjne w teorii układów o parametrach 'rozłożonych Str.



2 ZESZYTY NAUKOWE POLITECHNIKI Ś L ISKIEJ Seria: ELEKTRYKA z Nr kol. 820 Marian PASKO Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika śląska WĄSKOPASMOWY FILTR RC-GIC ZAWIERAJĄCY OKRESOWO STEROWANE PARAMETRY S t r e s zc z e n i e. W artykule przedstawiono podstawową sekcję wąskopasmowego filtru RC z w y k o rzystaniem uogólnionego konwertora impedancji (GIC). Syntezę oparto o model syntezy Yanagisawy dla k o n w e r torów impedancji ujemnej. Przedstawiono wpływ na dobroć Q P r? e_ strajanych okresowo parametrów filtru. Rozważono wrażliwość s Q, S x o SJ D(JW ) I proponowanego filtru na zmiany parametrów. 1. Wstęp W wielu urządzeniach pomiarowo- kontrolnych istnieje potrzeba s t o s o w a nia filtrów o przestrajanych charakterystykach. PrzestraJanie to może o d bywać się np. poprzez zmianę wartości przewodności. W pracy zaproponowano model filtru wąskopasmowego wykorzystując uogólniony konwertor impedancji (GIC) drugiego rzędu, który prowadzi do struktury filtru mającego dwie uziemione przewodności, które można łatwo przestrajać. 2. Analiza filtru Zmodyfikowany model syntezy Yanagis wy [2], [9]. przedstawiono na rys. 1, w którym: Y l g, \ 2 g, Y lb Y b są to dwójniki RC. Element (GIC) jest czwórnikiem aktywnym o macierzy łańcuchowej. 1 O O k (s) (1) Rys. 1 gdzie : k(s) = const.
![6 M. Pasko Rys. 2 Na rysunku 2 przedstawiona Jest Jedna z możliwych realizacji GIC [ l ], [2] [4 J z wykorzystaniem dwóch wzmacniaczy operacyjnych.](/docs-images/97/134045528/images/3-0.jpg "Dla nieskończenie dużych w s p ó ł c z y n n i k ó w wzmocnienia i układ z rys.")

 S H9 ; * 26 8 o U ) można zrealizować na wiele sposobów dobierajęc odpowiednio admitancje Y la Y2 a ' Y lb\"")
3 6 M. Pasko Rys. 2 Na rysunku 2 przedstawiona Jest Jedna z możliwych realizacji GIC [ l ], [2] [4 J z wykorzystaniem dwóch wzmacniaczy operacyjnych. Dla nieskończenie dużych w s p ó ł c z y n n i k ó w wzmocnienia i układ z rys. 2 ma macierz A o postaci: Y Y ( 2 ) Przez dobór odpowiednich admltancjl możliwa staje się realizacja dwójni- 2 1 ków aktywnych o wysokiej dobroci i o impedancjach typu <Xs, / ^s. ^ - j. s T r ansmitancja napięciowo- napięciowa układu z rys. 1 ma postać Ku (e) U2(e) U T T s T Y la + k ( 8 > Y lb Y la + Y 2a +" k ( s M V lb * Y z b J (3) Z relacji (3) wynika, że transmitancję napięciowo- napięciowę filtru pasmowego postaci Ku (s) S H9 ; * 26 8 o U ) można zrealizować na wiele sposobów dobierajęc odpowiednio admitancje Y la Y2 a ' Y lb" Y2b oraz k ( s ) - W pracy zaproponowano strukturę z w y k o rzystaniem (GIC) drugiego rzędu o k(s) = ks2 i wówczas admitancje dwójnlków RC s ę :

 * 2b (7) 1Q '1 o n 0 ks!")

4 Wąskopasmowy filtr RC-GIC. 7 natomiast Y la " s C la ' Y lb ' Y 2a G 2 a ' Y 2b G 2b Dla powyższych admitancji transmltencja (3) filtru ma postać: G la 8 K (s) = z = 5? = ^ u 2 la. 2 a s2 2 6 e *v> ' s + a + o 2b 2b g d z i e : C2 C4 k % (6) * 2b (7) 1Q '1 o n 0 ks! 2a 0 J2b Rys. 3 Schemat filtru wąskopasmowego przedstawiono na rys relacji (6) i (7) wynika, że Jeżeli będziemy zmieniać G2a i G2 b, tak aby 2a 2b * const wówczas co _ c o n s t, o a zmieniać się będzie dobroć Q realizowanego filtru.

 Celem poprawności działania układu zakłada się, że częstotliwość")
 w miejsce G2a i G 2b transmitancja (7) przyj mie postać: Ku (s) (9) stęd Q śr = Q y, natomiast coq")
5 8 M. Pasko a) c L b) i # ( t ) t * ( t ) c) i 9 w 6 O- d t T Ry#. 4 P r zestrojenie G 2fl i G 2b można realizować np. poprzez sterowanie kluczem tak Jak przedstawiono to na rys. 4a. Niech klucz zmienia swe położenie wg funkcji podanej na rys. 4b, wówczas przebieg przewodności g(t) zmienia się zgodnie z rys. 4c. średnia przewodność za okres przyjmie postać : d 0 ( 8 ) Celem poprawności działania układu zakłada się, że częstotliwość kluczowania jest znacznie większa od częstotliwości pracy filtru. Wstawiajęc relację (8) w miejsce G2a i G 2b transmitancja (7) przyj mie postać: Ku (s) (9) stęd Q śr = Q y, natomiast coq pozostaje bez zmiany. 3. W rażliwość O Wrażliwość Sx, S x i S podanej przez Bode'a [e].,t(s) ^ T ( s ) x S x " >c T T s I

) ł>1d (JM)1 s k o(jwvi «TT ^ G 2 b (G2a - ^ G 2 b )k (G2a - kw2g 2 b )2 fc>cla)2")
6 Wąskopasmowy filtr RC-GIC 9 Wpływ zmian parametrów czwórnlka aktywnego na częstotliwościową charakterystykę filtru ocsniono poprzez zmiany modułu tranemitancjl dla s «J«. W tym celu w y s t arczy ocenić zmiany modułu mianownika, zmiana bowiem modułu licznika powoduje Jedynie podnleelenie charakterystyki bez zmiany kształtu Ola rozpatrywanego ogniwa filtru» 0 1 o 1 o _ 1 S k - r SG 2b? S G 2a? Sumaryczna modułowa wrażliwość wynosi e i s; i -, x : i s i X I Natomiast o (jo )) ł>1d (JM)1 s k o(jwvi «TT ^ G 2 b (G2a - ^ G 2 b )k (G2a - kw2g 2 b )2 fc>cla)2 Wyrażenie to przyjmie wartość ekstremalną dla tu 1 wynosi Q. Przebieg s ld(jo>)l. f ^ ). gdzie ^ przedstawiono na rys. 5. Rys. 5

 = x -------- 2_------- (10) u T - 9 * 0, 0 2 j s t 1 R z e c z y w i s t y model filtru został przedstawiony na rys. 6. Parametry rzeczywiste filtru pokrywaję się z wyznaczonymi teoretycznie.")
7 10 M. Paako 4. Uwagi końcowe Z a p r o j e k t o w a n o filtr o następujących danych f = 1000 Hz, Q = 50, współczynnik ^ >5 - T * 10 ts, przyjęto GZg = G2b * G» 10 3 S, G 3 = Gg * G x = 10~4 S, C2 «C4» Cx, Wówczas C G C, =» 3,184 nf, C ,92 nf. la Q u>q x w o Transmitancja (7) dla wartości znormalizowanych R q» 1 kil, W Q = 25f przyjmuje postać 0,02 i 5 K..(i) = x _ (10) u T - 9 * 0, 0 2 j s t 1 R z e c z y w i s t y model filtru został przedstawiony na rys. 6. Parametry rzeczywiste filtru pokrywaję się z wyznaczonymi teoretycznie. Rys. 6 LITERATURA Cl] Białko M. : Filtry aktywne RC. WNT, Warszawa [ 2] Bruton ' L.T.: Biquadratic Sectioqs using Generalized Impedance Converters. The Radio Electronic Engineer No 11, November [3 ] Bruton L. T. : Tunable RC-Active Filters Using Periodically Switched Conductances. IEEE Trans, on Circuit Theory VOL CT-20, No 3, May [4 ] Bruton L. T. : M u l t i p l e-amplifier RC-Active Filter Design With Emphasis on G I C Realizations. IEEE Trans, on Circuits and Systems, VOL CAS-25, No 10, October 1978.
![W ą s k o pasmowy filtr R C - G I C.. 11 [ 5] Hlrano K. : Active RC All- Pass Filters Containing Periodically Operated Switches. IEEE Trans, on Circuits and Systems, September 1975. [ć] Mitra S. K. : Analiza i synteza układów aktywnych liniowych.](/docs-images/97/134045528/images/8-0.jpg "WNT, Warszawa 1974. 7] Pasko M. : Porównanie metod syntezy aktywnych filtrów RC. Materiały Seminarium VSSE Pilzen, Czechosłowacja 1978. f 8] Temes C., Mitra S. K. : Teoria i projektowanie filtrów.")


8 W ą s k o pasmowy filtr R C - G I C.. 11 [ 5] Hlrano K. : Active RC All- Pass Filters Containing Periodically Operated Switches. IEEE Trans, on Circuits and Systems, September [ć] Mitra S. K. : Analiza i synteza układów aktywnych liniowych. WNT, Warszawa ] Pasko M. : Porównanie metod syntezy aktywnych filtrów RC. Materiały Seminarium VSSE Pilzen, Czechosłowacja f 8] Temes C., Mitra S. K. : Teoria i projektowanie filtrów. WNT, Warszawa [9J Yanaglsawa T. : RC Active Networks Using Current Inversion Type Negative Impedance Converters. IRE Trans, on Circuit Theory, No 3, Recenzent : prof. dr inż. S t a nisław Bolkowski Wpłynęło do redakcji dnia 4. X I r. y3k 0n0JI0CH Łtó $HJITP RC-OKC c hepem ehhhm h iiapam etpam h P e 3 o m e ; B cxaite npeftciabjieh a peajin3a«hh y3konoaooh oro <J>Mi,Tpa RC c ncnoxb30b a- HHeu ocodmdhhoro KOHBepiopa conpoihbzehaa OKC. CHHie3 npobexdh aa ochobe Meioxa HaaraoaBbi b K z a c c e RC-KOC. Paccuoipeaa T a x x e aybcibhxeiihocib S x' S x sioro $HJinpa, A N A RROW BAND-PASS RC-GIC FILTER WITH P ERIODICALLY CONTROLLED PARAMETERS S u m m a r y A basic link of the narrow band-pass filter based on the generalized impedance converter GIC is presented. The synthesis is based on Yanagisawa procedure for negative Impedance converters. The Q-factor dependence on the periodically controlled parameters of the filter, as well as, its S^, S x, sensitivities are analised.

. przy której * -ot.")
9 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ Seria: ELEKTRYKA z Nr kol. 820 Marian PASKO Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika śląska WSZECHPRZEPUSTOWY FILTR DRUGIEGO RZfDU Z WYKORZYSTANIEM FILTRU ŚRODKOWOPRZEPUSTOWEGO Z PARAMETRAMI STEROWANYMI OKRESOWO Streszczenie. W artykule podano niektóre realizacje wszechprzepustowej sekcji drugiego rzędu przy zastosowaniu ogniwa filtru środkowoprzepustowego. Wybrano te realizacje filtrów środkowoprzepustowych, które odznaczają się łatwością przestrajanis częstotliwości (wo ). przy której * -ot. Przestrajanie a>0 odbywa się poprzez zmieniajęcę się przewodność sterowaną okresowo [4]. Wprowadzenie Filtrem wszechprzepustowym nazywamy czwórnik o tranamitancji operatorowej np. napięciowo-napięciowej postaci * < > 1 & T 1 ' tj. funkcji o stałym module na osi urojonej i zmiennym argumencie. Wielomian p (s ) Jest wielomianem Hurwitza. W pracy poszukiwać będziemy tranamitancji Ku (s). * - { s b. + as + b którę można przedstawić w postaci K (s). * H (a), (2 ) s + a s + b s + a s + b przy czym Hu (s) Jest transmitancję napięciowo-napięciowę filtru środkowoprzepustowego. Zależność (2 ) można przedstawić Jako połączenie równoległe układów o tranamitancji: - środkowoprzepustowej * identycznościowej.

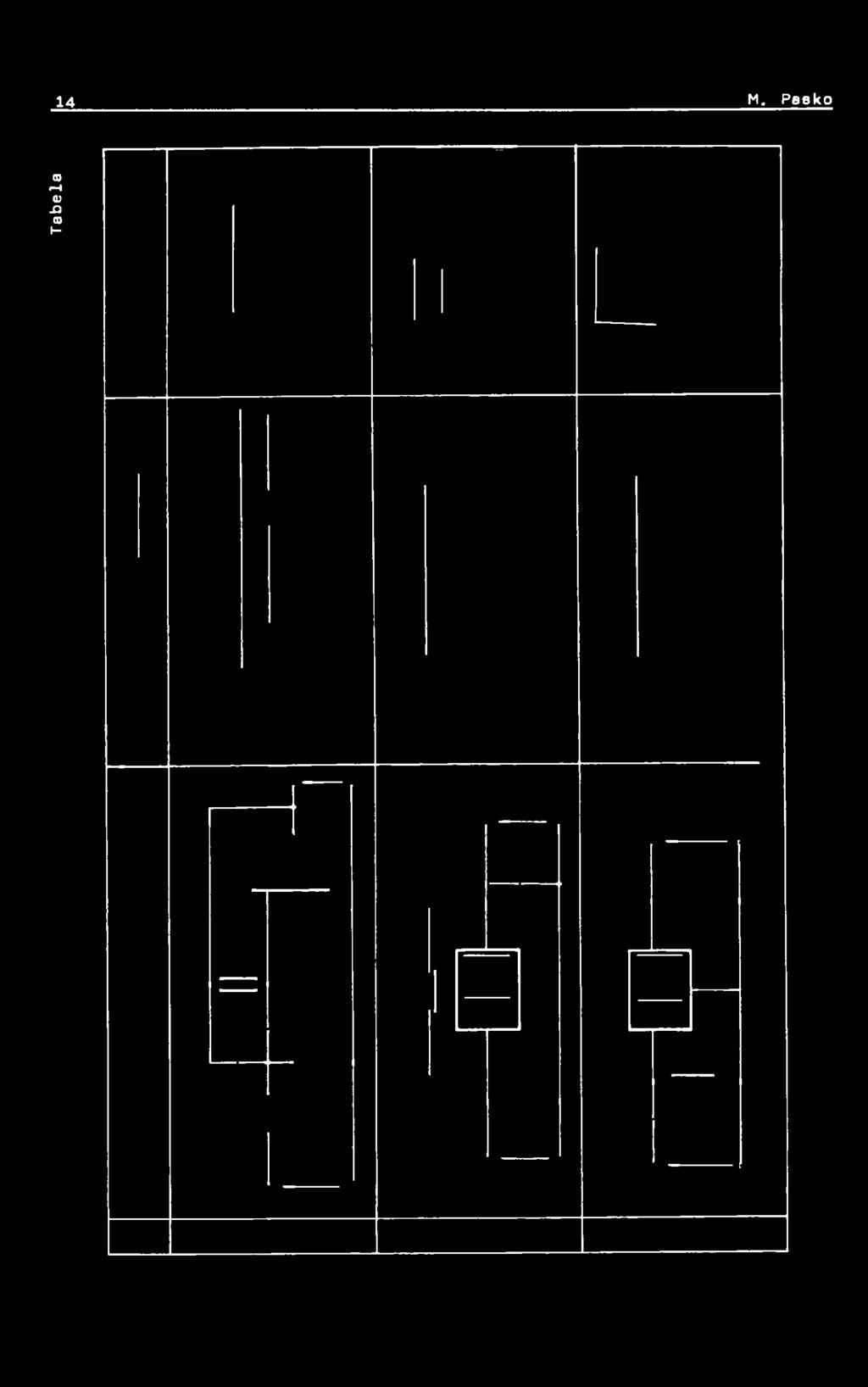
10 14 M. Pasko Tabela
![Wszechprzepustowy filtr drugiego rzędu. 15 Rys. 1 Zasadę tę przedstawiono na rysunku 1 [5], fć].](/docs-images/97/134045528/images/11-0.jpg "Realizacja filtrów środkowoprzepustowych Do realizacji filtrów środkowoprzepustowych wykorzystano te spośród znanych realizacji, w których w prosty sposób")
 = G y,")
![przy spełnieniu warunku, źe okres kluczowania T Jest znacznie mniejszy od okresu sygnału wejściowego t8 [3], [4].](/docs-images/97/134045528/images/11-2.jpg "W tabeli 1 podano trzy różne realizacje filtrów środkowoprzepustowych. Na rys.")
11 Wszechprzepustowy filtr drugiego rzędu. 15 Rys. 1 Zasadę tę przedstawiono na rysunku 1 [5], fć]. Realizacja filtrów środkowoprzepustowych Do realizacji filtrów środkowoprzepustowych wykorzystano te spośród znanych realizacji, w których w prosty sposób można przestrajać toq, np. za pomocę sterowanej przewodności. Zmianę o>0 uzyskuje się poprzez zmianę przewodności, której wartość średnia zależy od współczynnika wypełnienia, Wartość tę wyraża zależność G(t) = G y, przy spełnieniu warunku, źe okres kluczowania T Jest znacznie mniejszy od okresu sygnału wejściowego t8 [3], [4]. W tabeli 1 podano trzy różne realizacje filtrów środkowoprzepustowych. Na rys. 2 przedstawiono przykładowo wszechprzepustową 3ekcję IX rzędu przy zastosowaniu GIC I rzędu. Zastosowany w tym rozwiązaniu 6umator napięcia opisany Jest następującym wzorem, przy założeniu, że wzmacniacz operacyjny Jest Idealny i Jeżeli R i + R f = Rm + Rcj- Rys. 2


![Projektowanie R - przełęczanych układów może opierać się na wykorzystaniu klasycznych rozwięzań układów aktywnych RC. LITERATURA [1] Białko M. : Filtry aktywne RC. WNT, Warszawa 1979. [2] Geiger R.L., Allen P.](/docs-images/97/134045528/images/12-2.jpg "E., Ngo D. T. : Switched-resistor Filters - a Continuous Time Approach to Monolithic MOS Filter Design, IEEE Trans, on CT, Vol. CAS-19, No 5, 1982. [3] Guzińskl A.")
12 16 M. Pasko Zatem Z zależności (4) wynika, że współczynnik licznika funkcji Hu (s) można dowolnie nastawiać. Uwagi końcowe Z przedstawionych rozwiązań wynika, że układy te pozwalają w prosty sposób na przestrajanie <oq. Przestrajanle odbywa się poprzez zmianę Jednej tylko przewodności. Idea (przestrajanle) zmiany rezystancji czy też przewodności w obecnej chwili znajduje wielu zwolenników, dężęc do wprowadzenia tzw. układów R - przełęczanych [^z], [3J, które mogę stać się konkurencyjne z tzw. układami C - przełęczanymi. Projektowanie R - przełęczanych układów może opierać się na wykorzystaniu klasycznych rozwięzań układów aktywnych RC. LITERATURA [1] Białko M. : Filtry aktywne RC. WNT, Warszawa [2] Geiger R.L., Allen P.E., Ngo D. T. : Switched-resistor Filters - a Continuous Time Approach to Monolithic MOS Filter Design, IEEE Trans, on CT, Vol. CAS-19, No 5, [3] Guzińskl A. : Filtry R - przełęczane realizowane technikę MOS. Materi ły VI KKTOiUE, Gliwice [4 ] Hirano K. : Active RC All-Pass Filters Containing Periodically Operated Switches. IEEE Trans, on Circuits snd Systems, September [5] Kunicki T. : Synteza aktywnej wszechprzepustowej sekcji drugiego rzędu sterowanej napięciowo. Materiały III KKTOiUE, Gdaósk [6j Roberts G. : On Tuning the Group Delay of an Active RC All-Pass Resonators. IEEE Trans, on Circuits Theory, March Recenzent : prof. dr inż. Stanisław Bolkowski Wpłynęło do redakcji dnia 4.XI.1983 r.



13 Wszechprzepustowy filtr drugiego rzędu.. 17 BCEXnOJIOCHiiH MUIbTP C HCtI0JIb30BAHHBM nojioghoto SHJIBTPA C HEPEMEHHHMH IIAPAMETPAM0 F e 3 x> m e B c i a i & e p a c c u o i p e H U H e K O T o p u e p e a a u a a iih H B c e x n o a o c H H X $ h ju > t p o b c a c n o j i B a B H 6 M n ojio C H H X $ H J I b T p 0 8. PaC C M O TpeH H 1 6 p e a jm s a U H H nojioohhdi $ H JIb T p O B, b k o t o p h z u o x h o ji e r i c o p e r y j i n p o B a i b E a c i o i y z j l k K o i o p o tt - r f. P e r y jr a p o B - K y ( o n p o H S B O A H ic a < t e p e s n a p a o A m e c K H y n p a B J is u y io n 3 M e H «e i< y i> n p o B o A H M o c T b. A SECOND ORDER ALL-PASS LINK BASED ON THE BAND-PASS LINK WITH PERIODICALLY CONTROLLED PARAMETERS S u m m a r y In this paper there are presented some ell-pass link realizations with the bsnd-pess link application. Easy for tuning of frequency for which m -JC realizations have been chosen. This frequency Is tuned by a change of a periodically controlled conductance.



14 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIE3 Seria: ELEKTRYKA z Nr kol. 820 Marian PASKO Lesław TOPÓR-KAMIŃSKI Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika ślęska FILTR AKTYWNY RC O STRUKTURZE RÓWNOLEGŁEJ PRZEŁĄCZANEJ Streszczenie. Przedstawiono sposób realizacji transmitacji zmienianej cyfrowo"poprzez przełączanie struktury równoległej filtru, impulsami sterującymi o zmiennym współczynniku wypełnienia. Pokazano przykładowę realizację filtru środkowoprzepustowego o regulowanej szerokości pasma. 1. Wprowadzenie W zwięzku z coraz powszechniejszym stosowaniem mikroprocesorów w układach sterujęcych, zachodzi często konieczność przestrajanla parametrów torów analogowych sygnałem cyfrowym. Realizuje się to obecnie najczęściej poprzez bezpośrednlę zmianę wartości pewnych elementów w filtrach analogowych, takich jak rezystancje lub współczynniki wzmocnienia przy zastosowaniu mnożęcych przetworników cyfrowo-analogowych [i], [3]. W niniejszej pracy przedstawiono sposób realizacji zmienianej cyfrowo poprzez przełęczanie, struktury równoległej filtru, przy czym sterowaniu cyfrowemu podlega współczynnik wypełnienia Impulsów sterujęcych przy ich stałej częstotliwości. Zasada ta bywała dotychczas stosowana przy zmianach wielkości rezystancji, przy czym wartość jej przyjmowana byłe Jako średnia ze okres przebiegu sterujęcego [2J, [ś], [5]. 2. Ogólna zasada działania Na rysunku 1 przedstawiony Jest blokowy schemat filtru o strukturze równoległej przełęczanej. W układzie tym bloki i są filtrami podstawowymi o dowolnych z góry zaprojektowanych transmitancjach elementarnych, np. dolno- górnolub środkowoprzepustowych. Bloki mnożęce reprezentuję w ogólnym przypadku klucze Jako elementy przełęczajęce. Blok S jest sumatorem, a blok idealnym filtrem dolnoprzepustowym.
 T r 7-T 7 27 t 27 t Rys.")

e k«-w> ( 1) Jkw (t - i),(t) t")
15 20 M. Pasko, L. Topór-Kamiński Rys. 1 P(i) T r 7-T 7 27 t 27 t Rys. 2 Na rysunku 2 przedstawione są przebiegi czasowe funkcji sterujących kluczami. Funkcje te opisane sę relacjami: p(t) i q(t) p(t)» a Jkc^t, Sc(k3T a)e k«-w> ( 1) Jkw (t - i),(t) t (1-a)^ Sc[k?r(l-a) e k*-oo (2) _ 2*u' w których: a = y, 05s y.

 = 0 (3) Transformaty Fouriera tych przebiegów wynoszą: CTO p (co) * 2 ar a I Z Sc (kto a)<j(oo - kto ) k oo s 8 (4) Q (w) 2jr(l-a) ' Sc")
x(to) (7) Natomiast sygnały Z 1 i Z2 za kluczami mają widma: z j M «* p (w)] ( 8 ) oo Zjito) a y S c i k t ^ a ^ i c o - kcdg) k»-oo ( 9 ) Z2")
16 Filtr aktywny RC o strukturze równoległej. 21 Współczynniki wypełnienia tych przebiegów sterowane są Jednocześnie sygnałem cyfrowym w układzie opisanym n8 rys. 5, w ten sposób, źe spełniona jest zawsze zależność: p(t). q(t) = 0 (3) Transformaty Fouriera tych przebiegów wynoszą: CTO p (co) * 2 ar a I Z Sc (kto a)<j(oo - kto ) k oo s 8 (4) Q (w) 2jr(l-a) ' Sc j^kto9 (1-a)J tj(to - ktob)e 2 k =-90 (5) Widma sygnałów wyjściowych z filtrów podstawowych wynoszą: X j (to) «H ^ i o^co) (6) X2 (co) = H2 (to)x(to) (7) Natomiast sygnały Z 1 i Z2 za kluczami mają widma: z j M «* p (w)] ( 8 ) oo Zjito) a y S c i k t ^ a ^ i c o - kcdg) k»-oo ( 9 ) Z2 (to) «ji x2 (co) * Q(eo)J (1 0) Z2 (to) «(1-a) 'S Sc jktos (l-a)j X2 ((o-kcog )e 2 k=-*> (11) Sygnał wyjściowy z sumatora posiada widmo: Z (to) - y k=-oo a Sc(kcosa)X1 (<o-kws ) + ( l - a ) Sc kcos (1-a)J X2 (to-ktog) e -j<4 ( 12)
 ma ograniczone widmo, czyli x(w) * 0 dla co il (l3) Natomiast pulsacja przełączania kluczy cog musi spełniać zależności: W = i2 (14) S T Filtr Hj")
 ax1(o>) + (l-a)x2 (w)e (16) Wobec relacji (6) i (7) oraz założeniu, że cog >12 mitację całego filtru Jako: otrzymuje się trans- H («o) = - ahjfc)) ( l -")

17 22 M. Pasko, L. Topór-Kamlńskl Zakłada się, że sygnał wejściowy x(t) ma ograniczone widmo, czyli x(w) * 0 dla co il (l3) Natomiast pulsacja przełączania kluczy cog musi spełniać zależności: W = i2 (14) S T Filtr Hj teoretycznie powinien być idealnym filtrem dolnoprzepustowym o częstotliwości granicznej, przy czym winno zachodzić: Q sg cod «w s - il Sygnał wyjściowy y(t) całego układu będzie miał wtedy widmo ograniczone do k = 0 i opisane relację: y (oj) ax1(o>) + (l-a)x2 (w)e (16) Wobec relacji (6) i (7) oraz założeniu, że cog >12 mitację całego filtru Jako: otrzymuje się trans- H («o) = - ahjfc)) ( l - a ) H 2 (o>j (17) Oak wynika z relacji (17) przedstawiona na rys. 1 struktura przełęczana filtru pozwala otrzymać wypadkowę transmitancję jako sumę transmitancji filtrów podstawowych Hx i H2 wziętych z pewnymi wagami zależnymi od współczynnika wypełnienia a sterowanego sygnałem cyfrowym. 3. Filtr środkowo-przepustowy o regulowanej szerokości pasma Spośród wielu możliwości realizacji filtrów starowanych na Jakie pozwala struktura z rys. 1 Jako przykład rozpatrywany będzie filtr środkowoprzepustowy o regulowanej szerokości pasma. W tym przypadku filtry podstawowe Hj i H2 dobiera się Jako elementarne ogniwa środkowoprzepuetowe o tych samych częstotliwościach środkowych i wzmocnieniach: w ol = W o2 V H lo = H2 o Ho (18) a różnych dobrociach i Q2, przy czym: Q 1 - nq2 (19)
![Filtr aktywny RC o strukturze równoległe].](/docs-images/97/134045528/images/18-0.jpg "23 Zatem dla transmitancji Hj i H2 wyrażonych relacjami: H x(w) aq -co Jkcoe1 * Ja^to ( 20) H2 (o>) bq - oj Jkcob.")
![+ JbjW (21) oraz wobec relacji (l7), (18) 1 (19) otrzymuje się dla całego filtru: H(co) = kjb cl( l - n ) n]ł. JnB C + JBC(l+n) * on i 1.](/docs-images/97/134045528/images/18-1.jpg "_ \ - nbo' ( 2 2 ) g d z i e : bi = na^ (23) B = a1 to (24) C = a O - co (25) Następnie mozna określić moduł transmitancji h (co) dla")
 Otrzymana postać modułu transmitancji Jest trudna do dalszej analizy, zatem aby określić wpływ współczynnika wypełnienia a na jej wartość")
18 Filtr aktywny RC o strukturze równoległe]. 23 Zatem dla transmitancji Hj i H2 wyrażonych relacjami: H x(w) aq -co Jkcoe1 * Ja^to ( 20) H2 (o>) bq - oj Jkcob. + JbjW (21) oraz wobec relacji (l7), (18) 1 (19) otrzymuje się dla całego filtru: H(co) = kjb cl( l - n ) n]ł. JnB C + JBC(l+n) * on i 1._ \ - nbo' ( 2 2 ) g d z i e : bi = na^ (23) B = a1 to (24) C = a O - co (25) Następnie mozna określić moduł transmitancji h (co) dla częstotliwości znormalizowanej. V. O w to. i (26) oraz dobroci (27) Otrzymuje się relację: (1-J2 )2 (aił-n) + n [ «e j»,.. f. (28) Otrzymana postać modułu transmitancji Jest trudna do dalszej analizy, zatem aby określić wpływ współczynnika wypełnienia a na jej wartość sporzędzono diagram H(J)» f(a) dla ^ Jako parametru. Diagram sporzędzono dla przykładowych wartości n 10 i Q» 10 według tablicy 1 i przedstawiono na rys. 3.



19 24 M. Pasko, L. Topór-Kamińskl K ' 0 0,2 0,9 0,5 0,6 0,8 0,9 1 0,7 0,81 0,66 0,52 0,95 0,38 0^5 0,18 0,19 Tablica 1 0,8 0,91 0,75 0,60 0,53 0,95 0,32 0,26 0,22 0,9 0,98 0,89 0,70 0,69 0,56 0,99 0,95 0,93 0,95 0,99 0,87 0,83 0,79 0,76 0,72 0,71 0, Rys. 3



20 Filtr aktywny RC o strukturze równoległej. 25 Na diagramie linię przerywaną oznaczono poziom 3 db spadku modułu wypadkowego transmltancji całego filtru. Na poziomie tym można odczytać wpływ wartości współczynnika wypełnienia a na szerokość pasma. 4. Realizacja praktyczna przykładowego filtru środkowoprzepustowego W celu przebadania własności podanej struktury filtru zaprojektowano i wykonano filtr o własnościach Jak w punkcie 3, którego schemat przedstawiono na rys. 4. Filtry podstawowe zrealizowano na wzmacniaczach W2 i W3 Jako środkowoprzepustowe o częstotliwości fq «500 Hz 1 dobrociach odpowiednio = 62,8 oraz Q2 6,28. Funkcję przełączników spełniał układ scalony MCY sterowany z przetwornika sygnału cyfrowego na szerokość impulsu, którego schemat przedstawiony Jest na rys. 5. Charakterystyki modułu transmltancji całego filtru wykreślone na rejestratorze X-Y w skalach liniowych częstotliwości 1 wzmocnienia przedstawione są na rys. 6. Linie te są wykreślone odpowiednio dla pięciu wartości współczynnika wypełnienia a» 0, j, 1, co odpowiada dwubitowym dekoderom w układzie przetwornika z rys. 5. Pulsacja impulsów przełączających a)g zależna Jest od pulsaćjl przebiegu impulsów taktujących cot. gdzie n maksymalna liczba bitów sygnału cyfrowego. Wzmacniacz W4 na rys. 4 spełnia rolę sumatora oraz filtru dolnoprzepustowego. 5. Wnioski końcowe Oak wynika z przebadanego układu oraz analizy Innych przypadków doboru transmltancji filtrów podstawowych i H2, przedstawiona struktura filtru przełączanego umożliwia w łatwy sposób przestrajanie szerokości pasma oraz nachylenia charakterystyk, natomiast mało efektywne Jest przestrajanie częstotliwości granicznych i środkowych.


21 26 M. Pasko. L. Topór-Kamiński


22 Filtr aktywny RC o strukturze równoległej. 27 Rys

23 28 M. Paako. L. Topór-Kamiński t F
![Filtr aktywny RC o strukturze równoległej. 29 LITERATURA [l] Zurada 0., Białko M. : Projektowanie 1 realizacja filtrów aktywnych RC przestrajanych cyfrowo. IV KKT01UE, Zielona Góra 1981.](/docs-images/97/134045528/images/24-0.jpg "[2J Czarnul Z., Białko M. : Realizacja filtrów aktywnych RC przestrajanych cyfrowo o zwiększonym zakresie częstotliwości. V KKTOiUE, Łódi 1982. [3j Czarnul Z., Guzinski A.")
![: Elementarne układy do realizacji przestrajanych cyfrowo filtrów aktywnych RC z zastosowaniem RZNSN o wzmocnieniu 1. IV KKTOIUE, Zielona Góra 1981. [4] Hirana K., Nlshimura S.](/docs-images/97/134045528/images/24-1.jpg ": Active RCALL-Pass Filters Containing Periodicaly Operated Swithes. IEEE Transactions on Circuits Aud Systems. September 1975. [5] Pasko M.")

24 Filtr aktywny RC o strukturze równoległej. 29 LITERATURA [l] Zurada 0., Białko M. : Projektowanie 1 realizacja filtrów aktywnych RC przestrajanych cyfrowo. IV KKT01UE, Zielona Góra [2J Czarnul Z., Białko M. : Realizacja filtrów aktywnych RC przestrajanych cyfrowo o zwiększonym zakresie częstotliwości. V KKTOiUE, Łódi [3j Czarnul Z., Guzinski A. : Elementarne układy do realizacji przestrajanych cyfrowo filtrów aktywnych RC z zastosowaniem RZNSN o wzmocnieniu 1. IV KKTOIUE, Zielona Góra [4] Hirana K., Nlshimura S.: Active RCALL-Pass Filters Containing Periodicaly Operated Swithes. IEEE Transactions on Circuits Aud Systems. September [5] Pasko M. : Wąskopasmowy filtr RC-GIC zawierający okresowo sterowane parametry. Zeszyty Naukowe Politechniki śląskiej. Elektryka z. 95, Gliwice Recenzent: doc. dr inż. Maria Oastrzębske Wpłynęło do redakcji dnia 2 maja 1984 r. AKTKBHHÍ ÍHJIBTP RC C IlAPAJUUSJIbHOil IlEPEKJlKHATEJlbHOVÍ OTPyKTyPOÜ P e 3 D m e B oieite npeaciabjieh «eioa ocymecibjiehha xapaktepncihkh n3memii)siea uk- $pobuu CHTHajiou, Hepe3 nepekjimehhe napajuiejibhoii cxpyxxypu <{>njibxpa, ynpa- BjiKeui^MH HMnyjiboaMH c aepemehhhoi TtoaiMiHUHeHiOM 3anojnteHHS. IIoKa3aHO npz- MepHoe ocymectbjieirae noaocho-aponyckaioąero $njibipa c peryjiapobaahoi nijphho;; iipoayckahha. ACTIVE RC FILTERS WITH SWITCHED PARALLEL STRUCTURE S u m m a r y A realization method of the digltaly changed transfer function by th means of switching the parallel filter structure with the use of varyitime duration pulses is presented Band-pass filter with controlled band width has been shown as an example.

 if Ag(Ałx + E) - AO - O (i) przedstawia dla n 1 węzłowego obwodu zewierajęcego m gałęzi, układ n nieliniowych równań węzłowych z n niewiadomymi potencjałami węzłowymi xa, i 1, 2,.")

25 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ Seria: ELEKTRYKA z Nr kol. 820 Zygmunt GARCZARCZYK Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika śląska ANALIZA NUMERYCZNA PEWNEO KLASY NIELINIOWYCH OBWODÓW REZYSTANCYONYCH Streszczenie. W pracy przedstawiono metodę lteracyjnę analizy rezyetancyjnych obwodów opisywanych równaniami węzłowymi, która Jest zbieżna globalnie'. 1. Wstęp Równanie f(x) if Ag(Ałx + E) - AO - O (i) przedstawia dla n 1 węzłowego obwodu zewierajęcego m gałęzi, układ n nieliniowych równań węzłowych z n niewiadomymi potencjałami węzłowymi xa, i 1, 2,...,n. W równaniu tym A - oznacza zredukowanę macierz incydencji, E - wektor stałych wymuszeń napięciowych, O - wektor stałych wymuszeń prędowych, a g(u) - [ g ^ U j ), 9Z ^ 2 ^ w6ktor cha_ rakterystyk prędowo-napięclowych rezystorów nieliniowych i liniowych. Przy tym u» A*x + E - oznacza wektor napięć na rezystorach. Zastosowanie algorytmu Newtona-Raphsona do rozwięzania równania (i) prowadzi do znanej metody iteracyjnej, w której obwód nieliniowy Jest przekształcony w obwód liniowy rozwiązywany metodę potencjałów węzłowych [l], [2]. W metodzie tej istnieje Jednak problem zbieżności. Oest ona bowiem zbieżna Jedynie lokalnie tzn., że przybliżenie początkowe x^0 ^ winno być bliskie właściwemu rozwiązaniu x* równania (i), aby uzyskany ciąg przybliżeń x^1^, był zbieżny do x*. Wprawdzie twierdzenie Newtona-Raphsona-Kantorowlcza ustala Jak bliskie właściwemu rozwiązaniu musi być przybliżenie początkowe, aby zapewnić zbieżność, ale rezultat ten ma głównie znaczenie teoretyczne, gdyż Jego wykorzystanie w praktyce nie Jest łatwe. Jeśli wręcz niemożliwe. Pozostaje więc arbitralny wybór przybliżenia początkowego w oparciu o znajomość charakterystyk elementów nieliniowych. W praktyce prowadzi to do wielokrotnych prób, aż zostanie uzyskane rozwiązanie.
![32 Z. Garczarczyk Przedstawiona w pracy podejście do rozwięzania równania (i) oparte o znanę w analizie numerycznej metodę kontynuacji [3], [4], [5], pozwala tak zmodyfikować tę metodę analizy](/docs-images/97/134045528/images/26-0.jpg "obwodu, by była ona zbieżna globalnie, tj.")
![dla dowolnego przybliżenia poczętkowego x \ W oparciu o tę sarnę ideę w pracy [ó] była prezentowana metoda numerycznego rozwięzania równania obwodu, w którym niewiadomymi sę napięcia lub prędy](/docs-images/97/134045528/images/26-1.jpg "rezystorów nieliniowych. 2. Metoda kontynuac.ii Metoda kontynuacji Jest na ogół zbieżna globalnie [^5j.")
» 0 (4) był łatwy do rozwięzania. Funkcja H nazywana Jest często homotopię.")
26 32 Z. Garczarczyk Przedstawiona w pracy podejście do rozwięzania równania (i) oparte o znanę w analizie numerycznej metodę kontynuacji [3], [4], [5], pozwala tak zmodyfikować tę metodę analizy obwodu, by była ona zbieżna globalnie, tj. dla dowolnego przybliżenia poczętkowego x \ W oparciu o tę sarnę ideę w pracy [ó] była prezentowana metoda numerycznego rozwięzania równania obwodu, w którym niewiadomymi sę napięcia lub prędy rezystorów nieliniowych. 2. Metoda kontynuac.ii Metoda kontynuacji Jest na ogół zbieżna globalnie [^5j. Idea tej metody Jest następujęca: załóżmy, że H (x,30 = O dla 31«< 0, 1 > (2 ) Jest rodzinę równań nieliniowych zależnych od parametru takę, że f (x ) > H ( x,1) (3) Istotne przy tym Jest by układ równań H ( x,0)» 0 (4) był łatwy do rozwięzania. Funkcja H nazywana Jest często homotopię. Jeżeli pierwiastki x(jo równań (2) zależę od & w sposób cięgły, to opisuję one pewnę krzywę łęczęcę punkt x(o) z zerem x(l) układu (l). Rozwięzania x = x(&) wyznacza się dla cięgu rosnęcego wartości = C,,&2,...,&s» i stosujęc Jakęś szybko zbieżnę metodę iteracyjnę (np. metodę Newtona-Raphsona) do kolejnych równań H(x,»,1) = 0 i - 0, 1, 2 s (5) z na ogół dobrym przybliżeniem poczętkowym x(&i)^0 ^ zera x(&i). Przybliżenie to otrzymuje się z poprzednich wyników x (a 1 ) ^ x(>,i_ 1) (6) Rodzinę równań (2 ) tworzy się przyjmujęc Jako homotopię następujęca wyrażenie : (7)
 flíxj.xg) = Xj X j X 2 2 x 2-74. / 2 2 f2 (xlfx2 )» 2Xj + 2x^xg + x2-73 który posiada cztery rozwiązania: (3.")
![5], [-3, -5], [8, -5], [-8, 5]. Przyjęto homotoplę postaci (7) z funkcją x2 - b «0 gdzie a, b dowolne liczby stanowiące rozwiązanie układu f (x) 0.](/docs-images/97/134045528/images/27-1.jpg "Stosując algorytm Newtona-Raphsona do rozwiązania równania typu (5) uzyskano, przyjmując kolejno różne stałe a, b, zbieżność do każdego z rozwiązań.")
![Zastosowanie tego saaego algorytmu bezpośrednio do układu f(x) 0 zakończyło się niepowodzeniem dla przybliżenia początkowego x ' [0. O], 3.](/docs-images/97/134045528/images/27-2.jpg "Hoaotopla równań węzłowych Niech każdy z n gałęzi rozważanego obwodu posiada strukturę pokazaną na rys.")
27 Analiza numeryczna pewnej klasy nieliniowych.. 33 gdzie rozwiązanie układu H(x.O) = fq (x) ( 8) jest łatwe do uzyakanla. Przykład 1 Opisaną metodę kontynuacji zastosowano do rozwiązania układu równań f(x) flíxj.xg) = Xj X j X 2 2 x / 2 2 f2 (xlfx2 )» 2Xj + 2x^xg + x2-73 który posiada cztery rozwiązania: (3. 5], [-3, -5], [8, -5], [-8, 5]. Przyjęto homotoplę postaci (7) z funkcją x2 - b «0 gdzie a, b dowolne liczby stanowiące rozwiązanie układu f (x) 0. Stosując algorytm Newtona-Raphsona do rozwiązania równania typu (5) uzyskano, przyjmując kolejno różne stałe a, b, zbieżność do każdego z rozwiązań. Zastosowanie tego saaego algorytmu bezpośrednio do układu f(x) 0 zakończyło się niepowodzeniem dla przybliżenia początkowego x ' [0. O], 3. Hoaotopla równań węzłowych Niech każdy z n gałęzi rozważanego obwodu posiada strukturę pokazaną na rys. 1, gdzie G k oznacza rezystor nieliniowy lub liniowy opisany zależnością (9 ) natomiast oznacza konduktancję rezystora liniowego. Pokażeay, że Jeśli < 0, 1 > to równanie węzłowe tego obwodu tworzy homotoplę postaci (7). Uwzględniając przyjętą strukturę gałęzi obwodu otrzymuje się równanie u - u - E ( 10)

 mozna napisać + E) + (l-x)gjl(atx+e) - 0 (14) Stąd otrzymuje się następujące")
28 34 Z. Garczarczyk (1-A)GkA u k i = i - O (U) gd zie: u, i - oznaczają wektory napięć i prądów gałęzi, u, i - wektory napięć i prądów elementów rezystancyjnych. PoniewaZ i»>,g(ó) + (l->,)g^u ( 12) gdzie G, - d i a g j ^, ^ 3 L V 2 ^ " " to na podstawie I prawa Kirchhoffa Ai - O (13) oraz wykorzystując transformację węzłową,t u > A x (14) mozna napisać + E) + (l-x)gjl(atx+e) - 0 (14) Stąd otrzymuje się następujące równanie węzłowe H ( x,jo ^ ^ A g ( A t x+e) - A O (l-».)- A G, A ł x - A ( 0 - G A E)l - O (15) ( 7>
 = AG Atx - A(0-G E) (16) O ia Jest szczególnie proste, gdyż jest to układ równań liniowych. 4.")

 można przekształcić równania (17) do postaci : A J a, G ^ + (l-*)g^jatx ^ + 1^ = - a [o ^ - J l G ^ E + (l-?")
29 Analiza numeryczna pewnej klasy nieliniowych. 35 Przy tym wyznaczenie rozwiązania układu f (x) = AG Atx - A(0-G E) (16) O ia Jest szczególnie proste, gdyż jest to układ równań liniowych. 4. Dyskretny obwód równoważny Algorytm Newtona-Raphsona dla układu równań (15) ma postać: o ( x ^, & ) x ^ + 1 ^» - h ( x ^, j i ) ( 1 7 ) Macierz Oacoblego funkcji H(x,fc) Jest następujęca: 3 ( x ^. f c ) - A ^ f c G ^ + (I-JOg J a * (18) gdzie G^J^ oznacza diagonalne macierz dynamicznych konduktancji rezystorów nieliniowych dla napięć na tych rezystorach w J-teJ iteracji. Uwzględniając zależność (18) można przekształcić równania (17) do postaci : A J a, G ^ + (l-*)g^jatx ^ + 1^ = - a [o ^ - J l G ^ E + (l-?) (D-G^E)J dla», < 0,1> (19) gdzie 3 ^ - 3 ^ + G ^ U ^ J (20) UQ ^ f A *x ^ + E (2 1 ^ 3*j) g ( u ^ ) (22) Równania (19) stanowię zmodyfikowane postać równań węzłowych tzw. dyskretnego obwodu równoważnego [2]. Rozwięzywanie tych równań rozpoczyna się od rozwięzania układu równań liniowych reprezentujęcych dla >.«0 poczetkowy obwód liniowy: AGJlA tx (j + 1) - A(O-G^E) (23)
 (24) stanowiący algorytm Newtona- Raphsona dla równania (i).")
 stanowiło podstawę do napisania programu komputerowego analizy nieliniowych obwodów rezyetancyjnych opisanych równaniem węzłowym (l).")
30 36 Z. Garczarczyk Dla O < & < 1 rozwiązywane są równania obwodów, w których konduktancje liniowa gałęzi sę atopnlowo zmniejszane i zastępowane konduktancjami nieliniowymi. Dla A» 1 rozwięzuje się układ równań A G ^ ^ A tx ^ + 1 ^ - A ( O ^ - G ^ E ) (24) stanowiący algorytm Newtona- Raphsona dla równania (i). Postępowanie to pozwala na otrzymanie dobrego przybliżenia początkowego x ( l ) ^ dla równania (24). co zapewnia zbieżność do właściwego rozwiązania x* równania (l). 5. Program komputerowy Równanie (19) stanowiło podstawę do napisania programu komputerowego analizy nieliniowych obwodów rezyetancyjnych opisanych równaniem węzłowym (l). Tekst programu napisanego w Języku Fortran i realizowanego na minikomputerze MERA 60 podany Jest w DODATKU. W programie tym użytkownik może wielokrotnie zadawać wybrane wartości konduktancji początkowego obwodu liniowego oraz przyrostu parametru A,. Przedstawiona wersja programu przystosowana Jest do pobierania informacji dotyczących obwodu ze zbioru wcześniej przygotowanego. Przykład 2 Wykorzystując napisany program dokonano obliczeń dla obwodu pokazanego na rys. 2. Przyjęto, że E» 11 V, Rj R^» 2ił, R2 " R3 Za*oio no przy tym, że charakterystyki rezystorów liniowych są określone dla zakresu napięć < -20 V, 20 V >. Charakterystyki kondukcyjne rezystorów nieliniowych Rg i Rfi określone zostały tabelami U5 15 u6 * V 0 0,25 0, ,25 A V A Przyjęto,,ta konduktancje początkowe obwodu liniowego mają wartości: G, G G,» G. G- 0,25 S, - 1 S. Wybierając przyrost parametru A A «0,5 uzyekano właściwe rozwiązania równe xa» 4 V, xfa 1 V, xc * - 3 v * xd

.")
31 Analiz«numeryczna pewnej klaty nieliniowych.. 37 Rys. 2 6.»»agi końcowe Przedstawiona metoda analizy jak łatwo spoetrzac noże być rónleż stosowana w przypadku obwodów nieliniowych zawierających liniowe jak i nieliniowe źródła prądowe sterowane napięciem. W tyn przypadku n a d a r z G ^ w równaniu (19) nie będzie już diagonalna. Konduktancje liniowe >C2 ^ " *,Gn^ 99 stanowić zbiór dowolnych liczb rzeczywistych. Oznacza to, że dla różnych zbiorów ich wartości otrzymuje elę różne przybliżenia rozwięzanla x(o). Fakt ten można by wykorzystać przy opracowywaniu procedury znajdowania wszystkich rozwięzart równania (l) [7j. LITERATURA [l] Calahan O.A.: Projektowania układów elektronicznych za ponocę naszyny cyfrowej. WNT, Werszawa [2j Chua L. O., Lin P.M.: Konputarowa analiza układów elektronicznych. WNT, Warszawa [3] Dahlqulst G., BJorck A.: Matody numeryczna. PWN, Warszawa [4] Oryja M., Oankowacy CJ.M. : Przeględ metod 1 algorytmów numerycznych. WNT, Warszawa [5J Ortega 3. M., Rhelnboldt W. C. : Iterative solution of nonlinear equations in several variables. Academic Press, New York [ó] Tadeusiewicz M. : Analiza pewnej klasy obwodów rezystencyjnych w przestrzeni mn. Rozprawy Elektrotechniczne, 1973, z. 2.
![38 Z. Garczarczyk [ 7 ] Chao K. S., Lin O.K., Pan C. T.](/docs-images/97/134045528/images/32-0.jpg ": A systematic search method for obtaining multiple solutions of simultaneous nonlinear equations, IEEE Transactions on Circuits and")
![Systems, September 1975. [8] Chao K.S., Saeks S.: Continuation Methods in Circuit Analysis. Proc. L IEEE, August 1977. Recenzent: doc.](/docs-images/97/134045528/images/32-1.jpg "dr hab. ini. Michał Tadeusiewicz Wpłynęło do redakcji dnia 2 maja 1984 r.")

32 38 Z. Garczarczyk [ 7 ] Chao K. S., Lin O.K., Pan C. T. : A systematic search method for obtaining multiple solutions of simultaneous nonlinear equations, IEEE Transactions on Circuits and Systems, September [8] Chao K.S., Saeks S.: Continuation Methods in Circuit Analysis. Proc. L IEEE, August Recenzent: doc. dr hab. ini. Michał Tadeusiewicz Wpłynęło do redakcji dnia 2 maja 1984 r. HHCJIEHHHii AHAJIH3 OCHOTO KJIACCA HEJttiHEilHHX PE3HCTHBHHX HEHEii P e 3 b u e B o iat b e n pesciab jieh rjiocajibho oioahmh8 mstoa HTeppaTHBHoro pemehhh y3jiobax ypabhehhfl HejiHHeamoc pe3ncihbhłix uen efi. NUMERICAL ANALYSIS OF A CLASS OF NONLINEAR RESISTIVE NETWORKS S u m m a r y In the paper globally convergent iterative method of analysis of nonlinear resistive networks described by nodal equations has been presented.

 C... NDO - WEZEL KOŃCOWY < DO ) C... A - MACIERZ INCYDENCJI C... ES - WEKTOR SEM < E ) C... JS - WEKTOR SPM (J> C.")

33 Analiza numeryczna pewnej klasy nieliniowych. 39 FORTRAN IV V02.5 PAGE 001 C... PROGRAM ANALIZY NIELINIOWYCH OBWODOW REZYSTANCYJNYCH C... OPARTY NA ROZWIĄZANIU HOMOTOPII ROWNAN WĘZŁOWYCH METODA C... NEWTONA-RAPHSONA. DYSKRETNY OBWOD RÓWNOWAŻNY C... DEFINICJA ZMIENNYCH C... NW - LICZBA WEZLOW NIEZALEŻNYCH C... NG - LICZBA GALEZI C... MIX - WSKAŹNIK TYPU WYDRUKÓW C... = O V PLUS WYNIKI KOŃCOWE ANALIZY C... = 1 JAK DLA O PLUS GN ORAZ JN C... = 2 JAK DLA 1 PLUS A, UQ. JQ, G C... ETYP - TYP ELEMENTU GALEZI (G,E»J,EX) C... NTYP - KOD TYPU GALEZI (1,2,3,4 ) C... GALZ - NUMER GALEZI C... NOD - WEZEL POCZĄTKOWY < OD ) C... NDO - WEZEL KOŃCOWY < DO ) C... A - MACIERZ INCYDENCJI C... ES - WEKTOR SEM < E ) C... JS - WEKTOR SPM (J> C... UG - WSPÓŁRZĘDNE NAPIEC CHARAKTERYSTYK NIEL.(WIERSZAMI) C... IG - WSPÓŁRZĘDNE PRADOW CHARAKTERYSTYK NIEL. (WIERSZAMI) C... NK - LICZBA WSPÓŁRZĘDNYCH C... UQ - WEKTOR NAPIEC REZYSTORÓW NIELINIOWYCH C... JQ - WEKTOR PRADOW REZYSTORÓW NIELINIOWYCH C... G - MACIERZ RÓŻNICZKOWYCH KONDUKTANCJI GAŁĘZIOWYCH C... GN - MACIERZ KONDUKTANCJI WĘZŁOWYCH C... JN - WEKTOR WĘZŁOWYCH WYDAJNOŚCI PRĄDOWYCH C... V»VN - WEKTOR POTENCJAŁÓW WĘZŁOWYCH C... Ul - WEKTOR NAPIEC GALEZI C... JG - WEKTOR PRADOW GALEZI C... X - POMOCNICZY WEKTOR NAPIEC CHARAKTERYSTYKI NIEL. C... Y - POMOCNICZY WEKTOR PRADOW CHARAKTERYSTYKI NIEL. C... ND - LICZBA WSPÓŁRZĘDNYCH WEKTORA X I Y C... T - PARAMETR HOMOTOPII C... DT - PRZYROST PARAMETRU C... GT - WEKTOR KONDUKTANCJI POCZĄTKOWEGO OBWODU LINIOWEGO C... DANE WEJŚCIOWE C... REKORD O - NW, NG, MIX C... REKORD 1 - ETYP, GALZ, NOD, NDO C... REKORD 2 - ND, X(l), Y(l>, X(2>, Y(2),...,X(ND>, Y(ND) C... ALBO - ES(GALZ) C... LUB - JS(GALZ) C,.. ZESTAW REKORDOW 1 I 2 NALEŻY POWTORZYC TYLE RAZY C... ILE JEST ELEMENTÓW (G,E,J> W OBWODZIE C... DANE POCZĄTKOWE C... REKORD O - V<1), V(2>,...,V(NW) C... UWAGA: DANE WEJŚCIOWE KOŃCZY REKORD Z ELEMENTEM' EX. C... WEZEL ODNIESIENIA WINIEN MIEC NUMER 0. C... CHARAKTERYSTYKI REZYSTORÓW LINIOWYCH SA C... ZADAWANE PRZEZ TRZY PUNKTY ( U, J(U) ) PROGRAM ANOR 0002 REAL JS,JN,J1,IG,JQ,JG,JW 0003 INTEGER ETYP,GALZ 0004 DIMENSION NTYP(4),A(10,20),ES(20),JS(20),J1 (20),G(20,20), *GN(10,10),G1(20,10>,JN(10),V(10),X(10),Y(10),

 WRITE(7,1000) FORMAT(// DANE //) READ (2,10) NW,NG,MIX FORMAT(313) WRITE (7,20) NW.")
34 40 Z. Garczarczyk FORTRAN IV V02.5 PAGE 002 iuq(20),u1(20),jg(20>,vn(10),jg<20),gt(20> 0005 COMMON UG(20,10),IG(20,10>,NK(20) 0006 DATA A/200*0./,ES/20*0./,JS/20»0./,NTYPa>,NTYP(2>, Ó C..- F ' 215 «NTYF (3>,NTYP(4)/ G,'E,'J, EX / OPEN (UNIT=2> NAME" DX1: FTN2.DAT,TYPE= OLD ) WRITE(7,1000) FORMAT(// DANE //) READ (2,10) NW,NG,MIX FORMAT(313) WRITE (7,20) NW.NG FORMAT(5X,' ANALIZA NIELINIOWEGO OBWODU REZYSTANCYJNEG0V5X, \*' METODA POTECJALOW WĘZŁOWYCH - DYSKRETNY OBWOD RÓWNOWAŻNY'// 5X» LICZBA WEZLOW =,I2»5X, LICZBA GALEZI - >12//) C... ( CZYTANIE I WYDRUK DANYCH DO 50 1=1.4 ' IF(ETYP.EQ.NTYP(I)) GO TO 70 CONTINUE WRITE(7.60) ETYP FORMAT(/5X.A2. «NIEWŁAŚCIWY TYP ELEMENTU«/) GO TO 30 IF(1-4) WRITE(7.90) FORMAT(//5X. KONIEC DANYCH'//' PUNKT STARTOWY /) GO TO ( ).1 READ( ) N D.(X(I> >Y(I),1=1,ND) FORMAT(I3.20F9.3) NK(GALZ)=ND DO 130 1=1, ND UG(GALZ,I)=X(I) IG(GALZ,I)=Y(I) WRITE(7,140) ETYP,GALZ,NOD,NDO,(X(I>,Y(I),1=1,ND) FORMAT(/5X.A2, GALAZ,13, OD WEZLA,13, DO WEZLA,13, (6X, U,10X, J /30(47X,E10.3,1X,E10.3/)) GO TO 200 READ(2,160) WARTOŚĆ FORMAT(F6.2) ES(GALZ)=WARTQSC WRITE(7,170) ETYP,GALZ,WARTOŚĆ FORMAT(5X,A2, GO TO 30 READ( 2, 190) WARTOŚĆ FORMAT(F6.2) JS (GALZ) =UARTOSC WRITE(7,170) ETYP,GALZ.WARTOŚĆ GO TO 30 IF(NOD.GT.O) A(N0D,GALZ)=1.0 IF(NDO.GT.O) A(ND0,GALZ)=-1.0 GO TO 30 GALAZ,I3.5X, WARTOSC=,E10.3/)
 GO TO 265 C... ITERACJA L - TA C... OBLICZANIE WEKTORA NAPIEC REZYSTORÓW UQ=AT*V+ES DO 260 1=1, NG ui(i)=o. DO 250 J=1,NW 0065 250 Ul<I)=U1<I)+A(J,I)#V(J) 0066 260 UG(I)=U1 CD+ESCI) C.")
 GO TO 210 0076 280 CONTINUE C... WYDRUKI KONTROLNE 0077 IF(MIX.LE.")
 0084 WRITE(7,320) 0085 320 FORMAT (//5X, WEKTORYi',5X»'UG >6X, JG /) 0086 DO 330 1=1,NG 0087 330 WRITE(7,340) I,UG(I),JG(I) 0088 340 FORMAT(12X,I2,2(2X,F6.")
35 Analiza numeryczna pewnej klasy nieliniowych.. 41 FORTRAN IV V02.5 PAGE T= L=0 WRITE(7,225) T 225 FORMAT< PARAMETR = ',F4.2//> 230 L=L+1 IF(T.EG.O.) GO TO 265 C... ITERACJA L - TA C... OBLICZANIE WEKTORA NAPIEC REZYSTORÓW UQ=AT*V+ES DO 260 1=1, NG ui(i)=o. DO 250 J=1,NW Ul<I)=U1<I)+A(J,I)#V(J) UG(I)=U1 CD+ESCI) C... OBLICZANIE WEKTORA F'RADOW REZYSTORÓW NIELINIOWYCH JQ ORAZ C... MACIERZY RÓŻNICZKOWYCH KONDUKTANCJI GAŁĘZIOWYCH DO 280 1=1,NG 0068 DO 270 J=1,NG (I,J)= IF(T.EQ.O.) GO TO IGAR=I 0073 CALL FUNC(IGAR,UQ(I>,JG(I),G<I,I>,FIX,L> 0074 IF(FIX.EG.0.) GO TO CONTINUE C... WYDRUKI KONTROLNE 0077 IF(MIX.LE.1) GO TO WRITE(7,290) FORMAT(///5X, MACIERZ INCYDENCJI /) 0081 DO 300 1=1,NW WRITE(7,310> (A(I,J>,J=1,NG> FORMAT(IX,20F6.1) 0084 WRITE(7,320) FORMAT (//5X, WEKTORYi',5X»'UG >6X, JG /) 0086 DO 330 1=1,NG WRITE(7,340) I,UG(I),JG(I) FORMAT(12X,I2,2(2X,F6.2)) 0089 WRITE(7,350) FORMAT(// MACIERZ RÓŻNICZKOWYCH KONDUKTANCJI GAŁĘZIOWYCH /) 0091 DO 360 1=1,NG WRITE(7,370) (G(I,J),J=1,NG) FORMAT(1X,15F8.2> C... FORMOWANIE ROWNAN WĘZŁOWYCH C... MACIERZ KONDUKTANCJI WĘZŁOWYCH GN=A*G*AT DO 385 1=1, NG G(I,I)=T*G(I,I)+(1-T)*GT(I) 0096 DO 390 J=1,NW 0097 DO 390 I=1,NG 0098 G1(I,J)= DO 390 K=1,NG G1(I,J)=G1(I,J)+G(I,K)*A(J,K) 0101 DO 400 1=1, NW 0102 DO 400 J=1,NW 0103 GN(I,J)= DO 400 K=1,NG GN(I,J)=GN(I,J)+A(I,K)#G1(K,J)
»J=1»NW> 0112 430 FORMAT(1X.10E12.3) C... WEKTOR WĘZŁOWYCH WYDAJNOŚCI PRĄDOWYCH JN=A*(JS-JQ+G»AT*V> 0113 440 DO 460 1=1. NG 0114 J1(I)=0. 0115 IF(T.EQ.O.) GO TO 455 0117 DO 450 J=1.")
=JN(I)+A(I»J)*J1(J> 0126 IF(MIX.LT.l) GO TO 510 0128 WRITEC7.480) 0129 480 FORMAT<//5X. WEKTOR WĘZŁOWYCH WYDAJNOŚCI FRADOWYCH '/) 0130 DO 490 1=1. NW» 0131 490 WRITE(7.")
=JN(I) 0141 IF(ABS(V(I)-VN(I))-TOL) 520.520.530 0142 520 CONTINUE 0143 GO TO 550 C... NASTĘPNA ITERACJA 0144 530 DO 540 1=1.NW 0145 540 V(I)=JN(I) 0146 IF(T.GT.O.) GO TO 230 0148 550 WRITE(7.")
36 42 2. Garczarczyk FORTRAN IV V02.5 PAGE IF(MIX.LT.l) GO TO WRITE(7.410) FORMAT<//5Xr' MACIERZ KONDUKTANCJI WĘZŁOWYCH /) 0110 DO 420 1=1>NW WRITE(7f430) (GN(I.J)»J=1»NW> FORMAT(1X.10E12.3) C... WEKTOR WĘZŁOWYCH WYDAJNOŚCI PRĄDOWYCH JN=A*(JS-JQ+G»AT*V> DO 460 1=1. NG 0114 J1(I)= IF(T.EQ.O.) GO TO DO 450 J=1.NW J1<I>=J1<I>+G1<I»J>*V<J> 0119 Jl(I)=JS(I)-T*(Ja(I>-Jl(I>> / J1(I)=J1(I>-(1-T>*GT(I)*ES(I) CONTINUE 0122 DO 470 1=1.NW 0123 JN(I>= DO 470 J=1.NG JN(I)=JN(I)+A(I»J)*J1(J> 0126 IF(MIX.LT.l) GO TO WRITEC7.480) FORMAT<//5X. WEKTOR WĘZŁOWYCH WYDAJNOŚCI FRADOWYCH '/) 0130 DO 490 1=1. NW» WRITE(7.500) JN(I) FORMAT<1X»E12.3) C... OBLICZANIE POTENCJAŁÓW WĘZŁOWYCH - METODA ELIMINACJI GAUSSA CALL GAUSS(NW.GN.JN.DIX) 0134 IF(DIX.EQ.O.) GO TO T0L=l.E IF(T.EQ.O.) GO TO DO 520 1=1.NW 0140 VN(I)=JN(I) 0141 IF(ABS(V(I)-VN(I))-TOL) CONTINUE 0143 GO TO 550 C... NASTĘPNA ITERACJA DO 540 1=1.NW V(I)=JN(I) 0146 IF(T.GT.O.) GO TO WRITE(7.555) L.(I.VN(I)»1=1.NW) FORMAT ( ITERAC JA= ', 13» WEZEL» POTENCJAL /IO (16X, I2.3X. *E13.6/>> 0150 T=TYDT 0151 IF(T.GT.l.) GO TO GO TO 220 C... WYNIKI ANALIZY - PRĄDY I NAPIĘCIA GAŁĘZI OBWODU DO 565 1=1.NG 0155 U1(I)= DO 565 J = i»nw Ul(I)=U1(I)+A(J.I)*V(J> 0158 DO 570 1=1. NG JG(I)=JQ(I)-JS(I) 0160 DO 580 1=1»NG WRITE(7.590) I.U1(I)»JG(I>
 0167 WRITE(7.610) I.JW 0168 610 FORMAT< UEZEL,12. SUMA PRADOW=,F8.")
37 Analiza numeryczna pewnej klasy nieliniowych.. 43 FORTRAN IV V02.5 PAGE FORMAT<6X> GALAZ '.I2.3X» NAPIECIE=»E10.3.3X, PRAD=.E10.3/) C... SPRAWDZENIE WYNIKÓW ANALIZY - I PRAWO KIRCHHÜFFA 0163 DO 620 1=1.NU 0164 JW= DO 600 J=1.NG JU=JW+A(I»J>*JG<J) 0167 WRITE(7.610) I.JW FORMAT< UEZEL,12. SUMA PRADOW=,F8.5) CONTINUE WRITE(7,640) FORMATC///5X,' KONIEC ANALIZY'///) 0172 STOP 0173 END /
>B<10>20)>C(10f20)fD(10f20) f * H<10)fW(10)fU(10)fU (10)fM(IOfIO) 0004")
=UG(K,I+1)-UG(KfI) 0012 N2=N-2 0013 DO 20 1=1 fn2 0014 W(I)=H(I+1)/(H(I)+H(I+1)) 0015 20 U(I)=1.")
) GO TO 40 0021 M(IfI+1)=W(I> 0022 M(I+1fI)=U(I+1) 0023 40 M(IfI)=2.0 0024 50 CONTINUE 0025 CALL GAUSS(N2fM fv fdix) 0026 C(1fK>=0. 0027 C(NfK)=0.")
38 44 Z. Garczarczyk FORTRAN IM C... PODPROGRAM OBLICZANIA PRADOW I RÓŻNICZKOWYCH KONDUKTANCJI C... REZYSTORÓW NIELINIOWYCH 0 CHARAKTERYSTYKACH J(U) INTERPOLOWANYCH C... NATURALNYMI FUNKCJAMI SKLEJANYMI STOPNIA SUBROUTINE FUNC(KfZfS fdsffixfier> 0002 REAL M>IG 0003 DIMENSION A <10120)>B<10>20)>C(10f20)fD(10f20) f * H<10)fW(10)fU(10)fU (10)fM(IOfIO) 0004 COMMON UG(20f10)fIG(20f10)fNK<20) 0005 DATA M/900*0./ OOOó N=NK(K> 0007 IF(IER.GT.l) GO TO 80 c... WYZNACZANIE WSPÓŁCZYNNIKÓW FUNKCJI SKLEJANYCH 0009 N1=N DO 10 1=1fNI H(I)=UG(K,I+1)-UG(KfI) 0012 N2=N DO 20 1=1 fn W(I)=H(I+1)/(H(I)+H(I+1)) U(I)=1.-W(I) 0016 IO 30 1=1 fn V(I)=3.0*(<IG<KfI+2)-IG(KfI+1))/H(I+1)-<IG(KfI+1)-IG<KfI)>/ * H(I))/(H<I)+H(I+1)) 0018 IO 50 1=1 fn IFCI.GT.(N-3)) GO TO M(IfI+1)=W(I> 0022 M(I+1fI)=U(I+1) M(IfI)= CONTINUE 0025 CALL GAUSS(N2fM fv fdix) 0026 C(1fK>= C(NfK)= DO 60 I=1fN C(I+1fK)=V(I) 0030 DO 70 I=1fN A(IfK)=IG(KfI) B(IfK)=(IG(KfI+1)-IG(KfI))/H(I)-H(I)*(C(I+1fK)+2.*C<IfK>>/3. 70 D(IfK) = (C(I+1fK)-C<IfK))/H(I)/3. C... WYZNACZENIE PRZEDZIAŁU W KTÓRYM LEZY Z IF(Z-UG(Kf1)) 120f90f ' 1= GO TO IF<Z-UG(KfN>> 140f110f I=N GO TO WRITE(7f130) Z fk FORMAT<»ZMIENNA NIEZALEZNA='fE10.3f' Z GALEZI fi3f * NIE NALEŻY DO DZIEDZINY*'//' ZMIENIĆ PUNKT STARTOWY /) 0042 FIX= RETURN DO 150 I=2fN IF(Z-UG(KfI)) 160fIó Of CONTINUE =1-1 C... OBLICZANIE WARTOŚCI FUNKCJI S(Z) I POCHODNEJ DS<Z>
+ (Z -U G (N ti))*(b < I»K )+ (Z -U G")
)) 0049 D S= B (I> K )+ (Z -U G < K»I)> *< 2.")
39 Analiza numeryczna pewnej klasy nieliniowych.. FORTRAN IV V 02.5 PAGE S = A (I»K )+ (Z -U G (N ti))*(b < I»K )+ (Z -U G (K»I))* * (C < l7 K )+ (Z -U 6 < K» I))*D < I.K ))) 0049 D S= B (I> K )+ (Z -U G < K»I)> *< 2.»C < I»K )+ (Z -U G (K»I))«3.»D (I»K )) 0050 FIX = RETURN 0052 END
fB<10> 0003 N1=N-1 0004 DO 100 1=1 inl 0005 P=0.")
 3 0 f3 0 f50 0012 30 WRITE(7*40) 0013 40 FORMAT</10Xf * OSOBLIWY UKŁAD ROWNAN * / * ZMIENIĆ PUNKT STARTOWY'/) 0014 DIX=0.")
=A(KiI)/P 0027 70 CONTINUE 0028 DO 90 K=KK,N 0029 DO 80 JK=KK»N 0030 A(KfJK)=A(K.")
40 46 2. Garczarczyk FORTRAN IV V02.5 PAGE 001 C... PODPROGRAM ROZWIĄZYWANIA UKŁADU ROWNAN LINIOWYCH 0001 SUBROUTINE GAUSS<NfA fb fdix> 0002 DIMENSION A<10f10)fB<10> 0003 N1=N DO 100 1=1 inl 0005 P=0. OOOÓ DO 20 K=IfN 0007 IF(ABS(P)-ABS(A(KfI))) 1 0 f2 0 f P=A(KfI> 0009 L=K CONTINUE 0011 IF(ABS(P>-0.) 3 0 f3 0 f WRITE(7*40) FORMAT</10Xf * OSOBLIWY UKŁAD ROWNAN * / * ZMIENIĆ PUNKT STARTOWY'/) 0014 DIX= RETURN DO 60 J= rn 0017 SAVE=A(IfJ) 0018 A<IfJ)=ACLfJ> 0019 A<LfJ)=SAVE CONTINUE 0021 SAVE=B<I) 0022 B(I)=B(L) 0023 B(L)=SAVE 0024 KK=I DO 70 K=KKiN 0026 A(K»I)=A(KiI)/P CONTINUE 0028 DO 90 K=KK,N 0029 DO 80 JK=KK»N 0030 A(KfJK)=A(K.JK)-A(K»I)*A<IfJK) CONTINUE 0032 B<K)=B(K)-A(KfI)*B(I> CONTINUE CONTINUE 0035 B(N)=B<N)/A<NfN) 0036 IF<N.EQ.l) GO TO DO 120 1=1 fni 0039 IB=N-I 0040 IC=N DO 110 K=1fI B(IB)=B<IB)-A<1B.IC)«B(IC) 0043 IC=IC CONTINUE 0045 B(IB)=B(IB)/A(IBfIB) CGNIINUE DIX= RETURN 0049 END



41 ZESZYTY NAUKOWE POLITECHNIKI ŚLISKIEJ Seria: ELEKTRYKA z Nr kol. 820 Stanisław FRYCZ Lesław TOPÓR-KAMIŃSKI Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika śląska PRZE ŁĄCZNIK0W0-K0NDENSAT0ROWY UKŁAD MNOŻĄCY Streszczenie. Przedstawiono klasyfikację analogowych i cyfrowych układów mnożących. Pokazano przykład układu parametrycznego sterowanego cyfrowo oraz opisano model układu mnożącego zbudowanego na bazie aktywnych obwodów przełęcznikowo-kondensetorowych. 1. Wprowadzenie Operacja mnożenia sygnałów elektrycznych, ważna z punktu widzenia przetwarzania przenoszonej przez nie informacji. Jest niemożliwa do wykonania w układach liniowych i stacjonarnych. Oo realizacji mnożników analogowych wykorzystuje się elementy o pewnych charakterystykach nieliniowych np. logarytmicznych, lub elementy o parametrach sterowanych innym sygnałem np. tranzystor połowy. W praktyce mnożniki te wykonywane sę technikę mikroelektronlcznę Jako elementy scalone. Majęc do dyspozycji analogowy układ mnożęcy o odpowiedniej klasie dokładności mnożenia, można tworzyć sieci elektryczne o zadanych z góry własnościach nieliniowości lub niestacjonarności czasowej. Obecnie wskutek powszechnego wprowadzenia do praktyki cyfrowych systemów sterujęcych (mikroprocesory) oraz sterowanych mini układów analogowych (filtry przestrajane cyfrowo) zachodzi konieczność stosowania układów mnożących Jednocześnie sygnały analogowe i cyfrowe. Zakładając w ogólności, że każdy układ mnożący posiada dwa wejścia oznaczone jako x i y. Jedno wyjście z oraz dzieląc sygnały na dwie klasy: analogowe (a ) i cyfrowe (C), można wyróżnić sześć rodzajów mnożników przedstawionych w tablicy 1. Bloki 2 i 4 z tej tablicy znane są powszechnie Jako przetworniki w układach analogowo-cyfrowych przy założeniu, że na Jedno z ich wejść podawany Jest analogowy sygnał wzorcowy. Z punktu widzenia teorii obwodów interesujące znaczenie ma blok gdyż pozwala on budować sieci analogowe o parametrach sterowanych sygnałem cyfrowym. W najprostszym przypadku PCA, PCA może być uważany ze źródło napięciowe sterowane napięciem, którego współczynnik wzmocnienia z kolei

 Przetwornik cyfrowo-")

42 48 S. Frycz, L. Top6r-Kamlńakl Tablica 1 Lp Rodzaje sygnałów Zaciskowych A_ A Nazwa Lub schem ed z a s ię p c z y Analogowy układ mnożący (A Uhl) Przetwornik cyfrowo- 2. o analogowy (PCA) -3. A-stały PCA PCA * A A Przetwornik analogowo- cyfrowy (PAC) 5. >1 C A -stały c V PCA r PAC. C o 6. C Cyfrowy układ mnożący (CUM)
 Rys. 1 Rys. 2 sterowany Jest sygnałem cyfrowym (rys. 1).")
 - kf(n)j (1) ZakładaJęc, źe")

43 Przełęcznlkowp-kondensatorowy układ mnożący Ul HC ')u2=kfu1 ( >F Ul \ 1 u Ś' 1 Co > U2=kfu1 )l_l *f(n) Rys. 1 Rys. 2 sterowany Jest sygnałem cyfrowym (rys. 1). Na bazie tego źródła da się zrealizować przykładowo układ z pojemnością CQ, przedstawiony na rys. 2. W ogólnym przypadku Jest on opisany równaniem róźnicowo-różniczkowym o postacit 1 ^ ( 0 co a r Ujit) - kf(n)j (1) ZakładaJęc, źe wartość współczynnika f w źródle u2 Jest podtrzymywana przez cały okres kwantyzacji sygnału cyfrowego f(n), można w równaniu (l) zastępie go funkcję achodkowę czasu clęgłsgo Równanie to wtedy przyjmie postać: du du. srr- - kcofs(t)3 r + kc0ui df (t) dt (2 ) Odpowiadajęcy równaniu (2) schemat zastępczy układu z rys. 2 przedstawiony Jest na rys. 3, na którym: n»0 (3) Rys. 3

 Przedstawione dotychczas klasyfikacja układów mnożących zakłada rozpatrywanie tylko dwu rodzajów sygnałów: analogowych i")

44 50 S. Frycz, L. Topór-Kanirtski Z analizy przedstawionego prostego przykładu zastosowania mnożnika analogowo-cyfrowego w teorii obwodów widać, że tworzone przy Jego zastosowaniu sieci są parametryczne o typie nieatacjonarności zarówno ciągłej (kondensator C2 ) Jak 1 dyskretnej (konduktancja Gj wraz j. kluczem <p (t)). 2. Mnożenie sygnałów w układach przełacznlkowo-kondensatorowych (SC) Przedstawione dotychczas klasyfikacja układów mnożących zakłada rozpatrywanie tylko dwu rodzajów sygnałów: analogowych i cyfrowych. Istnieją jednak układy, w których sygnały o wartościach ciągłych (dowolna liczba rzeczywista) są przetwarzane dla dyskretnych momentów czasowych (np. układy SC). Na rys. 4 przedstawiony Jest schemat blokowy mnożnika, w któ- Rys. 4 rym proces mnożenia sygnałów x i y dokonywany Jest w okresie kwantyzacji t Jednego z nich, przy czym wartość drugiego przetwarzania Jest na częstotliwość Impulsów sterujących pewnymi przełącznikami. Przebiegi sterujące kluczami przedstawione są na rys. 5. Odpowiednik układu z rys. 4 zrealizowany przy użyciu przełączników, kondensatorów i wzmacniaczy operacyjnych pokazuje rys. 6. W układzie tym: przy czym: (5)



45 \ Przełęcznikowo-kondensatorowy układ m >. y y 51 Ry s. 5 U, % u2 Rys. 6 zatem dla całego układu zachodzi: u2 = ( 6 ) przy czym mnożenie jest dwućwiartkowe. gdyż > O. Poprzez wprowadzenie dodatkowego sygnału u^ steru r.cego częstotllwościę funkcji przełączającej : k = ^ U4- (7)



46 52 S. Frycz, L. Topór-Kamlnski otrzymuje się układ mnożąco-dzielący działający zgodnie z relacją: ( 8 ) gdzie k = c2/c3. Aby u2 było równe 0 dla & > X przetwornik ut na f powinien wytwarzać w tym przypadku <j?2 = O, a y>3 * <p 1. W celu uzyskania mnożenia czteroćwiartkowego należałoby wprowadzić dodatkowo detektor znaku sygnału u3> który przełączałby odpowiednio strukturę całego układu. Oeżeli założyć ciągłość sygnałów u1 oraz u2, np. poprzez zastosowanie na wyjściu ekstrapolatora lub filtra, natomiast częstotliwość f sterować sygnałem cyfrowym, to przedstawiony układ może spełniać rolę przetwornika cyfrowo-analogowego. LITERATURA I l] Topór-Kamiński L. : Analogowy układ mnożący jako element teorii obwodów. ZN Politechniki Śląskiej, Elektryka z, 54, Gliwice I 2] Topór-Kamiński L. : Elementy składowe rezystancyjnych aktywnych obwodów parametrycznych. III SPETO, Ustroń 1979, ZN Politechniki śląskiej. Elektryka z. 68, Gliwice [3] Michajłow F.A., Terjajaw D., Buljekow W.: Dinamika niestacjonarnych diskretnych sistem. Izd. Nauka, Moskwa i4] Viawanathan T. R., Faruque S.M., Vlach O.: Switched-Capacitor Transconductance and Related Building Blocks. IEEE Trans. CAS, No 6, [5] Jury E.I.: Przekształcenie Z i Jego zastosowanie, WNT, 'Warszawa [6] Data acquisition components and subsystems catalog. Analog Oavices, Recenzent: doc. dr inż. Maria Jastrzębska Wpłynęło do redakcji dnia 10 maja 1984 r.

47 Przelecznikowo-kondensatorowy uklad mnoiecy 53 AHAJIOTOBHE H UH4P0BHE MHOSKTEJIBHHE yctpodciba P e 3 jo u e B C T a i b e n p e A O i a B j i e H a Kjiacca<j?HKauna a H a a o r o B t o t a o a $ p o B n x M H O x a x e j i B H H x y o i p o i t c i B, I I o K a 3 a H n p a M e p n a p a i t e x p a H e c K o i i c a c x e M H o u h i J p o b h m y n p a B j i e H a e M a x a K x e o n a c a H a M o a e a b M H O x a x e j i b H o r o y c x p o a c i B a, n o c x p o e H H o r o H a o c h o b s a a x H B H b i x e u K o c x H O - K J i r a e B H x p e neft. ANALOQUE AND DIGITAL MULTIPLIERS S u m m a r y Classification of digital and analoque multipliers has been presented. An example of a time-varying digitally controlled network is shown and a model of the multiplier built of active ewitched-capacitor elements is described.



48 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ Seria: ELEKTRYKA z Nr kol. 820 Lesław TOPÓR-KAMIŃSKI Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika Ślęska POŁĄCZENIA ELEMENTÓW OSOBLIWYCH Z DWÓONIKAMI KLASYCZNYMI Streszczenie. Opisano charakterystyczne dla sieci osobliwych reguły rozdzielności połączeń szeregowych i równoległych względem siebie. Przedstawiono sposób określania dwójnika zastępczego przy połęczeniach mieszanych elementów osobliwych i klasycznych, llustrujęc go analizę podstawowych dwójników układów z przełączanymi kondensatorami. 1. Wstęp Dwójniki elektryczne, na zaciskach których pręd i napięcie mogę być tylko zerowe lub dowolne w pewnym obszarze wartości, nazywane sę elementami osobliwymi. Oo zbioru tych elementów oprócz wprowadzonych przez Cerlina i Youla'ę [i] nullatora i noratora, można także zaliczyć przerwę i zwarcie [ 2 ], uogólnione komutatory [3 ], źródła autonomiczne [4 ] oraz idealne elementy diodowe [5]. Sak pokazano w pracach [3, 4, 5 ], elementy te można opisywać za pomocę formuł boolowsklch, korzystając z transformacji N przekształcającej zbiór R liczb rzeczywistych w zbiór dwuelsmentowy 0, 1r według definicji: Nx 0 gdy x s R i Jest równe tylko 0 1 gdy x g R 1 Jest dowolne Formuły te maję ogólnę postać: A i B u 0, ( 2 ) w których: A, B - sę operatorami logicznymi o wartościach ze zbioru j0 *1)«które mogę być stałe, zależne od czasu lub od obszarów zmienności prędu i napięcia, - sę odpowiednio logicznymi działaniami koniunkcji, alternatywy i równoważności.
 dwójnika osobliwego określone sę jednoznacznie przez operatory A i 8, gdyż pręd i napięcie mogę przyjmować tylko takie wartości, dla których formuła")

i + (Bj.")
49 56 L. Topór-Kamlńskl Natomiast i, u sę N-transformacjaml prędu i napięcia. Własności opisywanego przez formułę (2) dwójnika osobliwego określone sę jednoznacznie przez operatory A i 8, gdyż pręd i napięcie mogę przyjmować tylko takie wartości, dla których formuła ta jest spełniona.^ 2. Charakterystyczne własności aieci elementów oaobllwycti W pracach [3 ], [4 ], [5 ] pokazano sposób poszukiwania dwójników osobliwych równoważnych do danej sieci osobliwej widzianej między dwoma wybranymi węzłami. Sprowadza się on do wykonania odpowiednich działań logicznych na operatorach opisujęcych poprzez formuły boolowskle typu (2 ) elementy składowe tej sieci. Dla połęczeń szeregowego i równoległego dwóch elementów opisanych parami operatorów A lt B 1 oraz j A 2, B2 J, elementy zastępcze opisuję odpowiednio formuły: (Aj + A2 )i + (Bj. B2 )u * 0 (3) (AŁ. A2 )i + (B1 t B2)u» O (4) Korzystajęc z podanych zwięzków można wykazać równoważność tak zwanych połęczeń mieszanych trzech dwójników osobliwych przedstawionych na rys. 1 oraz rys. 2. b) (U h : ^3 ( Ą A ) d '3 a.3 Rys. 1 aj di bj dj d3 i L - d$ ( H I H L h (_l H " U I i Rys. 2
A3J l + [BjBg + b J u - O (5) [A, Aj + A 2A3] i + ^(Bx + B3) (B2 + 83 )]u - 0 (6) Dwa dwójnlkl osobliwe możne uważać za równoważne jeżeli")
, obowiązujących w algebrze Boole's [7J. Wykazaną równoważność układów a) 1 b) z rys.")

50 Połączenia elementów osobliwych z dwójnlkaml klasycznymi 57 I tak układy a) i b) z rys. 1 opisują odpowiednio formuły boolowskie: [(A, + A2 )A3J l + [BjBg + b J u - O (5) [A, Aj + A 2A3] i + ^(Bx + B3) (B )]u - 0 (6) Dwa dwójnlkl osobliwe możne uważać za równoważne jeżeli operatory logiczne w opisujących je formułach boolowskich są sobia równe, co dla relacji (5) i (6) można łatwo pokazać na podstawie reguł rozdzielności dodawania względem mnożenia (operatory A) oraz rozdzielności mnożenia względem dodawania (operatory B ), obowiązujących w algebrze Boole's [7J. Wykazaną równoważność układów a) 1 b) z rys. 1 można nazwać regułą rozdzielności połączenia szeregowego względem równoległego elementu osobliwego, natomiast równoważność układów z rya. 2 regułą rozdzielności połączenia równoległego względem dwójnika osobliwego szeregowego. Pokazane reguły rozdzielności nie obowiązują dla połączeń dwójnlków klasycznych (nieosobliwych), które opisują prewa algebry klasycznej ^8J. 3. Połączenia elementów osobliwych z dwójnlkami klasycznymi Rozpatrywane będą podstawowe połączenia, przedstawione na rys. 3, dwójnika osobliwego dq opisanego formułą (2) z dwójnikiem klasycznym d^ opisanym zależnością funkcyjną algebry klasycznej wiąłącą Jego zmienne zaciskowe. Rys. 3 W obu przypadkach dwójnik zastępczy może być osobliwym lub > klasycznym, przy czym uzależnione to jest wyłącznie od wartości operatorów.w {a. b opisujących element osobliwy. Aby to rozstrzygnąć należy badać ić die polączenia szeregowego wartość relacji (7), a dla równoległego wartość relacji (8), które są funkcjami logicznymi typu iloczyn z zakazem. Eg» A B (7) Er = AB (8)
 Ola dwójnlków osobliwych zmiennych w czasie (np.")
 dla odpowiednich przedziałów zmiennych zaciskowych.")
.. DZ. R Lo DZ Z k U o G Rys.")
51 58 L. Topór-Kamińskl Wartość operatora E dla odpowiedniego połączenia dwójnlków poprzez relację (9) decyduje o rodzaju dwójnika zastępczego d. dz ' doe + dke (9) Ola dwójnlków osobliwych zmiennych w czasie (np. typu komutator) należy relacje (7), (8) i (9 ) rozpatrywać w odpowiednich przedziałach czasowych, natomiast dla dwójnlków osobliwych nieliniowych (np. elementy diodowe) dla odpowiednich przedziałów zmiennych zaciskowych. Przykładem ilustrującym powyższe zależności (7) (8) (9 ) mogą być układy połączeń idealnej diody Zenera z rezystancją i konduktancją (rys. 4).. DZ. R Lo DZ Z k U o G Rys. 4 Ola obu połączeń diody Zenera szeregowego i równoległego wartości odpowiednich operatorów według relacji (7) (8) (9) przedstawiono w tablicy i oraz zilustrowano zależnościami geometrycznymi na płaszczyźnie i - u, pokazanymi na rys. 5. Rys. 5

 b a a Rys. 6 Rys.")
.")
52 Połączenia elementów osobliwych z dwójnikami klasycznymi 59 Tablica 1 i O u o A B S B r dzs dzr > f 0 d k d 0 0 Uz ro do d k < 0 o d k d o 4. Układy SC lako przykład połączeń elementów klasycznych Układy SC są typowym przykładem połączeń komutatorów sterowanych określonymi dyskretnymi funkcjami czasu cp. jako elementów osobliwych oraz kondensatorów jako elementów klasycznych. Modele podstawowych bloków SC można przedstawić ogólnie w postaci schematu podanego na rys. 6, przy czym źródło e reprezentuje zmienny w czasie sygnał wejściowy Uj. ( y Sieć L a L-s? komuiaiom =c d V* i s b e ) b a a Rys. 6 Rys. 7 f Źródło e wraz z siecią 1 komutatorów tworzą dwójnik osobliwy d z kondensatowldziany z zacisków ab (rys. 7). Układ wypadkowy dodk trywany Jako połączenie szeregowe dwójnika wypadkowego będzie rozpa- rem C (rys. 8). Jeżeli komutatory S^ do S^ będą sterowane dyskretnymi funkcjami czasu do i ich negacjami (pj do to elementy sieci komutatorowej łącznie ze źródłem e opisują formuły:
 o V_ Rys- 6 w układach SC zawsze z sygnałem wejściowym u 1 (czyli źródłem e) występuje w połęczeniu szeregowym jeden z komutatorów S^, pełnięc ę ^ rolę elementu")
![kwantyzujęcego napięcie Uj w * czasie [9]. Powoduje to występowanie w sieci osobliwej dq gałęzi o strukturze podanej na y, rys. 9 opisanej formułę (13). 0* Rys.](/docs-images/97/134045528/images/53-2.jpg "9 dk : «pk i + i»k < e > u = 0 (13) Obliczajęc zastępczy osobliwy dwójnik całej sieci komutatorowej dq otrzymuje się formułę (14), w której operatory A i B sę funkcjami boolowskimi operatorów")
53 60 L. Topór- Kamlńskl e: O i t l(u^e) = 0 (ll) a h ^? [ - f Formułę (ll) można inaczej zapisać Jako (12) " dla przesuniętego o e jjkładu współrzędnych. ~ V ^ o[2 ot+l<e>u=0 (12) o V_ Rys- 6 w układach SC zawsze z sygnałem wejściowym u 1 (czyli źródłem e) występuje w połęczeniu szeregowym jeden z komutatorów S^, pełnięc ę ^ rolę elementu kwantyzujęcego napięcie Uj w * czasie [9]. Powoduje to występowanie w sieci osobliwej dq gałęzi o strukturze podanej na y, rys. 9 opisanej formułę (13). 0* Rys. 9 dk : «pk i + i»k < e > u = 0 (13) Obliczajęc zastępczy osobliwy dwójnik całej sieci komutatorowej dq otrzymuje się formułę (14), w której operatory A i B sę funkcjami boolowskimi operatorów zmiennych w czasie ^ do oraz ich negacji. A [^l-..pl.p i-.-pji 8 [?Ji- 'V i = 0 (14) Konsekwencję powyższego Jtet takze zalezność relacji (7) i (9) od funkcji czasowych do dla całego dwójnika dz z rys. 8. Napięcia przed naładowaniem kondensatora u1 i po Jego naładowaniu u" w ogólnym przypadku będę funkcjami dyskretnymi przebiegów do <p^ oraz napięcia e. u «f'( ą..,ip 1,e) (15) u = f " ( ^... Ą. e ) (16) Dla koncepcji układów SC przedstawionej przez Fettweisa Qlo] zbiór dwójników podstawowych, które sę odpowiednikami dwójników klasycznych C, R i L pokazany jest na rys. 10, a odpowiadajęce im sieci osobliwe na rys. 11. Pracę kluczy Sj do S4 opisuję dyskretne funkcje czasu będęce okresowymi cięgami impulsów zerojedynkowych opisanych wraz z ich transformatami z przez relacje: * 1 - {1010} 4 6 *1 [ * * - 4 m (17)
 c) s3. JSc U l s2 3*\" S s ' u 1 Rys. 10 Joa Rys.")
 >3 - {l000}4 fi i3 = ipj.")
 Klucze do S4 opisywane są zatem formułami! S l!")
54 Połączenia elementów osobliwych z dwójnlkaml klasycznymi 61 '1 Ca H h b ) c) s3. JSc U l s2 3*" S s ' u 1 Rys. 10 Joa Rys. 11 lo c * i0101} 4 5? 2 * v ; - ś r * 7 ^ (18) >3 - {l000}4 fi i3 = ipj. (19) ^ 4 = {o i }4 ą 4.-2 ( 20) Klucze do S4 opisywane są zatem formułami! S l! ^2 ^ + ^1 0 ( 21) Sg! ipj i + <pz u * O ( 22) s3! </>3 i + <pa u - O (23) S4 : ^4 1 + * 0 (24)
 dq c : O f + < > + >3 < - e > ] u «O (27) Odpowiadające im relacje typu (9) mają postać: dza * d0pi < «>")
![+ dki i < > dzb dk [ * 2 < 0 > +?1 < 0 > ] (29) dzc dk [?](/docs-images/97/134045528/images/55-1.jpg "4 < e > + ^ 3 <- >] (30) Dla dwójnika dza w momentach n 2 k zachodzi: d za(2k) * do + dk1 < e > d k (31) Zatem kondensator ładuje się")
 do 1 < e> + dk 0 \" do (32) Lecz dq Jest wtedy przerwą, a zatem uc pozostaje takie samo Jak")
55 62 L. Topór-Kamlński \ Natomiast dwójnlki osobliwe z rys. 11 formułami: dq a : tpz i + <(>i < e > u» O (25) do b! O i + [ <f>2 ^ < e>] u» O (26) dq c : O f + < > + >3 < - e > ] u «O (27) Odpowiadające im relacje typu (9) mają postać: dza * d0pi < «> + dki i < > dzb dk [ * 2 < 0 > +?1 < 0 > ] (29) dzc dk [? 4 < e > + ^ 3 <- >] (30) Dla dwójnika dza w momentach n 2 k zachodzi: d za(2k) * do + dk1 < e > d k (31) Zatem kondensator ładuje się do napięcia e bowiem prąd mole być dowolny, gdyż A > <p = o. W momentach n = 2k + 1 zachodzi: dze(2k+l) do 1 < e> + dk 0 " do (32) Lecz dq Jest wtedy przerwą, a zatem uc pozostaje takie samo Jak dla poprzedzającego momentu parzystego. Napięcia na kondensatorze Ca wynoszą: ua (n) = 'y ip1 (k)e(n-k) (33) u"8 (n) = ^Jpjik-Zjein-k) O Stąd transformata Z ładunku dopływającego:
 - C E (z)1 ~ (36) a a 1 + z * Prąd można określić Jako: I(z) - (37) gdzie T» 21', a 1 Jest odstępem kwantyzacji")
, kondensator ładuje się kolejno do napięć e i 0.")
 można napisać: Pj <p2 - {ioio)4 + {oioi]4 - {i lj2 - y>0 (39) Stęd jej transformata Z: -1 - ł- - S- -.")
56 Przełączenia elementów osobliwych z dwójnlkami klasycznymi 63 czyli: 1-2 Q.(z) - C E (z)1 ~ (36) a a 1 + z * Prąd można określić Jako: I(z) - (37) gdzie T» 21', a 1 Jest odstępem kwantyzacji dyskretnych funkcji czasu. Impedancja Z(z) wynosi zatem: k (3'> Analogicznie dla dwójnika clz5 > P zwarciu punktów af (rys. 8), kondensator ładuje się kolejno do napięć e i 0. Pręd ładowania może być dowolny, gdyż dla dqb operator A zawsze Jest równy 0. Dla relacji (29) można napisać: Pj <p2 - {ioio)4 + {oioi]4 - {i lj2 - y>0 (39) Stęd jej transformata Z: -1 - ł- - S- -. l(z) (40) 1 - z' - Napięcia na wynoszę: n u b (n)» ^ ^ 0 (k)e(n-k) (41) O n ub (n) - L ^ o ^ 1)0 0 (42' S t ę d : Q b (z) - CbE(z)y -- L y = CbE(z)l(z) (43) Natomiast: Z b (z) = ^ (44)
 moina napisać i ^ 3 * * 4 {1010}4 (10) 2 *1 (45) Napięcia na kondensatorze Cc wynoszę i n uć (n) ^ < i i( )e(n-k) <4 6 > 0 n")
![u';(n) - ^(pjik-zi^-ein-k)] <4 7 ) Stęd : Qc (*) - CcE(z) fiiz) ^ ( z i z -2] <48) Czyli: Q (*) - C^eU)1 * ZX (49) 1 - z S t ę d : *.](/docs-images/97/134045528/images/57-2.jpg "<*> i 1 z Deżell dla lmpedancji Z(z) opisanych relacjami (38). (44) 1 (50) wprowadzić przekształcenia: z2 - w <51> 2-1-1.")
57 64 L. Topór-Kamlóakl Dla trzeciego dwójnlka dzc po zwarciu punktów af kondensator ładuje się na przemian do napięć e i -e. Dla relacji (30) moina napisać i ^ 3 * * 4 {1010}4 (10) 2 *1 (45) Napięcia na kondensatorze Cc wynoszę i n uć (n) ^ < i i( )e(n-k) <4 6 > 0 n u';(n) - ^(pjik-zi^-ein-k)] <4 7 ) Stęd : Qc (*) - CcE(z) fiiz) ^ ( z i z -2] <48) Czyli: Q (*) - C^eU)1 * ZX (49) 1 - z S t ę d : *.<*> i 1 z Deżell dla lmpedancji Z(z) opisanych relacjami (38). (44) 1 (50) wprowadzić przekształcenia: z2 - w <51> Ti> (52) W 1 * to otrzymuje się relacje: T_ 1 (53) a

![Wydeje się takie, Ze opia ten może być duzym ułatwieniem przy snalizle układów bardziej złozonych, które mozna by rozwiązywać z zastosowaniem przekształceń macierzy boolowsklch [ć] w miejsce](/docs-images/97/134045528/images/58-1.jpg "operatorów A 1 B. LITERATURA f l] Carlln H.O., Youla D. C. : Network synthesis with negative resistors. Proc. IRE, 49, 1961. \_2~\ Davies A.C.: The Significance of Nullators, Nora tors and Nullore in Active - network Theory.")
![The Rsdlo and Electr. Engln. Nov. 1967. f 3] Topór-Kamirtski L. :Elementy osobliwe i rozszerzenie pojęcia komutacji w obwodach elektrycznych. V SPETO, Ustroń 1981, ZN Politechniki śląskiej.](/docs-images/97/134045528/images/58-2.jpg "Elektryka z. 79; 1982. [ 4] Topór-Kamlńekl L. : Wprowadzenia Idealnych Źródeł autonomicznych 1 Zródlatora do zbioru elementów osobliwych. ZN Politechniki śląskiej. Automatyka z. 71, 1983.")
58 Połączenia elementów osobliwych z dwójnlkaml klasycznymi 65 które opisuję odpowiedniki elementów C, R i L ne płaszczyźnie lj). 5. Uwagi końcowe Przedstawiony sposób opisu połączeń układów elementów osobliwych z dwójniksmi klasycznymi daje dla prostych przykładów wyniki zgodne z otrzymanymi poprzez metody klasyczne. Wydeje się takie, Ze opia ten może być duzym ułatwieniem przy snalizle układów bardziej złozonych, które mozna by rozwiązywać z zastosowaniem przekształceń macierzy boolowsklch [ć] w miejsce operatorów A 1 B. LITERATURA f l] Carlln H.O., Youla D. C. : Network synthesis with negative resistors. Proc. IRE, 49, \_2~\ Davies A.C.: The Significance of Nullators, Nora tors and Nullore in Active - network Theory. The Rsdlo and Electr. Engln. Nov f 3] Topór-Kamirtski L. :Elementy osobliwe i rozszerzenie pojęcia komutacji w obwodach elektrycznych. V SPETO, Ustroń 1981, ZN Politechniki śląskiej. Elektryka z. 79; [ 4] Topór-Kamlńekl L. : Wprowadzenia Idealnych Źródeł autonomicznych 1 Zródlatora do zbioru elementów osobliwych. ZN Politechniki śląskiej. Automatyka z. 71, [ 5] Topór-Kamińskl L. : Diodowe elementy osobliwe. VI SPETO, Ustroń [ 6^ Topór-Kamlński L. : Ansllze obwodów osobliwych metodą mscierzowych formuł boolowsklch. ZN Politechniki śląskiej, Automstyka (przyjęte do druku). [ 7] Grzegorczyk A.: Zarys logiki matematycznej. PWN, Werszawe [ 8 3 Opial Z.: Algebra wyzsza. PWN, Warszawa [ 9 3 Nossek O.A.: Switched - Cepacitor - Filterrs: A Comparison of the Basic Design Principles. ECCTD, Warszawa [l03 Tettwels A. : Basic Principles of Switched Capscltor - Filters Using Voltage Inverter Switches. Arch. Elektron, u. Übertragungstechnik, 33, Recenzent: doc. dr InZ. Maria Oastrzębska Wpłynęło do redakcji dnie 10 maja 1984 r.



59 66 L. Topór-Kamlrtskl C O Iili,H H E H H E AHOMAJIBHfciX 9 J IE M E H T O B C KJIACCHHECKHMH AByXIlOJUOCHMKAMK P e 3 10 m e B c x a x b e o i r a c a H u l a a a H H u e A i m a H o u a j i b H H x o e i e f t n p a B n a a p a c n p e A e j i e H H H c o e ^ H H e H H a n o c x e A O B a T e x b H u x h n a p a A A e x b H u x o i H O C H i e j i b H O c e f i a. I l p e A C T a B x e H M e x o i o n p e A e j i e H H a 3 a M e H n i e x b H o r o A B y x n o x i o c H H K a A i m c u e m a H H H x c o e A H H e H H t t a H O M a u ib H H x h K a a o o H s e o K H X a x e u e H x o B a x a a j c e n p H B e A ë H a H a x H 3 o o h o b h u x A B y x - nojd O C H H K O B B ë M K O C X H O -K jn O 'le B H X U e O H X. CONNECTIONS OF SINGULAR ELEMENTS WITH CONVENTIONAL ELEMENTS S u m m a r y The characteristic dlstrlbutlvlty rules of series and parallel connections for singular networks are described. The method of determining of the equivalent one-part for mixed connections of singular and convencional elements is shown snd ilustrated by means of the analysis of basic one parts with switched capacitors.



60 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ Seria: ELEKTRYKA z Nr kol. 820 Oan CHOOCAN Instytut Elektroniki Politechnika śląska OBLICZANIE WRAŻLIWOŚCI WYŻSZYCH RZfDÓW I ICH ZASTOSOWANIE Streszczenie. W pracy przedstawiono wzory na obliczanie wrażliwo śći 5 I 3 rźędu funkcji układowych (oraz ich modułu 1 fazy) w dziedzinie częstotliwości. Uwzględnienie wrażliwości wyższych rzędów pozwala na rozszerzenie kresu górnego wrażliwości małoprzyrostowych. Pozwala to na lepszę aproksymację funkcji układowych przy większych odchyłkach parametrów. 1. Wprowadzenie Do analizy zachowania się obwodów przy małych zmianach wartości parametrów wykorzystuje się wrażliwości małoprzyrostowe 1 rzędu. Można określić ich kres górny [7, lo]. Przy większych zmianach wartości parametrów wykorzystuje się wrażliwości wielkoprzyrostowe. Mankamentem tej metody jest znaczny nakład czasu na analizę. Wykorzystanie małoprzyrostowych wrażliwości wyższych rzędów rozszerza znacznie zakres stosowania metod małoprzyrostowej analizy wrażliwośćiowej dla większych przyrostów parametrów. Takiemu postawieniu problemu i próbie jego rozwiązania poświęcona jest ta praca. Wyprowadzono wzory na obliczanie wrażliwości rzędu efektywną metodę obwodów dołączonych w dziedzinie częstotliwości dla liniowych obwodów złożonych z dwójników pasywnych i źródeł sterowanych i niesterowanych. Podano również wzory na wrażliwości modułu fazy prostych i złożonych funkcji układowych. Przeanalizowano ile i Jakich dodatkowych obwodów należy rozwiązać aby obliczyć współczynniki wrażliwości 2 i 3 rzędu. Wskazano, na prostych przykładach, na możliwość znacznego zwiększenia kresu górnego wrażliwości małoprzyrostowych. 2. Wrażliwości 2 rzędu Do obliczania wrażliwości 2 rzędu wykorzystano metodę obwodów dołączonych [l, 2, 4, 5, 6, 8j, a uzyskane wyniki dla prostych funkcji układo-
![68 O. Cholean wych podano w pracach [9, lo]. Dla przypomnienia podano wzory na wrażliwość napięcia wyjściowego układu U0 na zmiany admitancji oraz Yj quo df i Y i a2uo Y i u uouo.](/docs-images/97/134045528/images/61-0.jpg "i ( 1 ) y2 2 U- 5 U- UiUiUi U ) O O 2 U0 df YiY 1 6 U0 V j,,.o,,0,1..,0,,,,0,ji fr,t V j \" T ' ^YiaYj C i U +UiUJUi } (2) gdzie U^.")


61 68 O. Cholean wych podano w pracach [9, lo]. Dla przypomnienia podano wzory na wrażliwość napięcia wyjściowego układu U0 na zmiany admitancji oraz Yj quo df i Y i a2uo Y i u uouo.i ( 1 ) y2 2 U- 5 U- UiUiUi U ) O O 2 U0 df YiY 1 6 U0 V j,,.o,,0,1..,0,,,,0,ji fr,t V j " T ' ^YiaYj C i U +UiUJUi } (2) gdzie U^. Uj - napięcie na admitancji Y i(yj) w obwodzie podstawowym, U, U - napięcie na tych samych elementach w obwodzie dołęczonym, U 1, U '1 - napięcia na Y ^,Yj w obwodzie podstawowym zasilanym przez SPM 1 A dołęczonę równolegle do admitancji Y^, U 'J - napięcie na admitancji Y^ w obwodzie podstawowym zasilanym przez SPM 1 A dołęczonę równolegle do admitancji Y^. Wiadomo, że dla wrażliwości 1 rzędu U IU I U s s i + 3<3v X1 xi ~xi gdzie Uo " l Uo l 8 U u df X ć) U S x = u"~ * T l wrażliwość względna 1 rzędu modułu napięcia i I o wyjściowego UQ na zmianę rzeczywistego parametru o df " x i - wrażliwość 1 rzędu fazy napięcia UQ na zmianę i 1 rzeczywistego parametru x i. Zależność ta dla w r a żliwości 2 rzędu Jest bardziej złożona. Można wykazać [10], że np. U luj. U 2 U Uj U S = S 1 1- (Q ) J(Q S 0lQ x ) (4) x~ x2 2 xi xf xi x i gdzie u df. x2 e2 U S 2 = 2 T CTT ' 5 w r d i ^iwo^^ względna 2 rzędu modułu napięx i 0 cxi cia U o na zmianę parametru x ^,
 wynika, że luj U, 2 S 2 * Re(s + l (Qx ) (5) Xi X1 i U.")
 T 4, u x w0 wy o gdzie a, b proste")
 x^ x^ x^ xi xi ST ^ ^ sa - Sb - sa Sb - sa sb + 2Sb sb (lo) xjxj v x±xj x 1xJ xa Xj Xj")
62 Obliczanie wrażliwości wyższych rzędów.. 69 U 2 Q? r wrażliwość 2 rzędu fazy napięcia U na zmianę pax i Bx 1 rametru xt. Ze wzoru (4) wynika, że luj U, 2 S 2 * Re(s + l (Qx ) (5) Xi X1 i U. u u Q - Im(s ) - s' 0lQ (6) 2 ' 2' X vx X* x * X1 X1 Postępujęc analogicznie, uzyskano UJ x.x, VTuj u u u K J. \ - j i t f ) o, ; «, ; W oraz 0 Uo df _ ^ _. I m ( s Uo, _ s l u o l 0 u o l u o L u o Xj^Xj 1 J xixj xi J XJ 1 Dla złożonych funkcji układowych (T KI1,KT,M,N,Y,Y ) T 4, u x w0 wy o gdzie a, b proste funkcje układowe (prędy lub napięcia na wrotach), wrażliwości 2 rzędu na zmianę Jednego parametru x^ lub dwóch xlf x.; można wyznaczyć z zależności [lo] : st2 s82 ~ sb2 " s 82Sx + (Sx ^ (9) x^ x^ x^ xi xi ST ^ ^ sa - Sb - sa Sb - sa sb + 2Sb sb (lo) xjxj v x±xj x 1xJ xa Xj Xj x ± x Ł Xj Po przekształceniach [lo] uzyskano wzory na wrażliwości modułu i fazy funkcji układowych: S ^ 1 = s al - s b - s j a sj^b l + ( s l b )2 ( 1 1 ) xf xf xf xi xi xi
![70 3. Cholean i ( 12) oraz i (14) Z przeprowadzonej w pracach [lo 1 4] analizy wynika, że do obliczenia wrażliwości 2 rzędu funkcji układowej na zmianę m](/docs-images/97/134045528/images/63-0.jpg "parametrów obwodu należy dodatkowo rozwięzać układów równań opisujęcych układ podstawowy z wymuszeniami (SPM 1 A) połęczonymi równolegle kolejno do")

![obwodu podstawowego (gdzie 1 - liczba zmieniajęcych się źródeł sterowanych) lo] zasilanego przez SPM 1 A połęczonę kolejno równolegle do gełęzi sterujęcej](/docs-images/97/134045528/images/63-2.jpg "zmieniajęcego się źródła sterowanego.")
63 70 3. Cholean i ( 12) oraz i (14) Z przeprowadzonej w pracach [lo 1 4] analizy wynika, że do obliczenia wrażliwości 2 rzędu funkcji układowej na zmianę m parametrów obwodu należy dodatkowo rozwięzać układów równań opisujęcych układ podstawowy z wymuszeniami (SPM 1 A) połęczonymi równolegle kolejno do każdego ze zmieniajęcych się elementów lub gałęzi sterowanych zmieniajęcych współczynnik sterowania źródeł. 3. Wrażliwości 3 rzędu Obliczanie wrażliwości 3 rzędu metodę obwodów dołęczonych Jest bsrdzo ekonomiczne, wymaga bowiem tylko dodatkowej 1-krotneJ analizy obwodu podstawowego (gdzie 1 - liczba zmieniajęcych się źródeł sterowanych) lo] zasilanego przez SPM 1 A połęczonę kolejno równolegle do gełęzi sterujęcej zmieniajęcego się źródła sterowanego. Wrażliwości względne 3 rzędu funkcji układowej T na zalany parametrów xaxjxk zdefiniowane sę następujęco: (15) (16) S. ;T X.X.X, i J k df xix ixk r - *»X jbxj t>xk (17)
 = 2U1uJu uj i + 2UtU U '1,U '1 + 8 Y i + 2U1U U,','U 6UiUl (Ui'i^ a wrażliwość 3 rzędu U, Y3 03U Y3 S J - 1 r = 3")

64 O bliczanie wrażliwości wyższych rzędów Prześledźmy wyprowadzenie wzoru na wrażliwość 3 rzędu prostej funkcji układowej, np. T» UQ na zmianę parametru x^ «Y^. Trzecia pochodna napięcia Uo podług wyznaczona Jest z zależności i 3u0 r^-(2uiu U 'i) = 2U1uJu uj i + 2UtU U '1,U '1 + 8 Y i + 2U1U U,','U 6UiUl (Ui'i^ a wrażliwość 3 rzędu U, Y3 03U Y3 S J - 1 r = 3 * - OT» i W 1) (18> Y± O BYj^ o Oeszcze wyprowadzenie wzoru na wrażliwość 3 rzędu napięcia U0 na zmianę współczynnika wzmocnienia napięciowego < ws^ wego sterowanego napięciem (ŹNSN). Trzecię pochodnę napięcia UQ podług ^ o a..0,221, O,,0.0,221 s = ws^ liuli 221 li li 22i ^ gdzie [ 8] Uli- U li> u u - napięcia na gałęzi sterujęcej i-tego ŹNSN kolejno w obwodzie podstawowym, dołęczonym 1 podstawowym zasilanym przez SPM 1 A połęczonę równolegle do gałęzi sterowanej tego źródła, U22iir'U221 napięcie na gałęzi sterowanej i-tego ŹNSN kolejno w obwodzie dołęczonym i podstawowym zasilanym przez SPM 1 A połęczonę równolegle do gałęzi sterowanej tego źródła. Ponieważ pochodne częstkowe pierwszego rzędu można wyznaczyć [8] z zależności : eull..li fwst = 11 22i,, ,221..0,221,11 0 w s 1 uli 22i


65 72 3. Chojcan * e* vr> * W M - r o * M.» Z K l i ^ i* z M (.7 Z 1 M. I m * * z * z m tr z z a to-» z M U> -< -< -< Z -< -< * to» z «-* ir. z a to. m" J z a ro. z M V) Z -< < M S 1 X r* % < x -< a ro. z x CC z a to. z c* Cf' z a ro. -< -< -< M-* g M Z X x a?? «-* M z o x z z o o N M z z z o o o to ro to to ^ to z z z O O o M M M m ro ro z z o o m ro M M Z z o o * o Zo zo Z O o > z O M m a m < H zo ~ 3 U 3 N z o M Z O M O 3 0 O M M 1 X C > C N O 1 3 i a. >< -» o N n a n a m <» c -» o < < M a a cr n C M tłh rt 3 o m m a to m n 3 a O a N 3 o a»» i < i c M O c M X M c c x w O ' C. r. c* A M. c c c c r O u o x O i r M O N M W 2 O M _x c c ro *-* o ro C M c* o * i N M ^ ro m. M x c c x xc a ro c O M c ro O M <-*.o c M. M x ro «-» M C u» M O c M «ro O C «-*to 10 O M M - X M C «-*.o c M M x- c C «-*o O C M O to x- M - IO M M M M «-» to W X ro c M M co c «-*o c «-* o *ro IO M c O < * M C M to O c 10. M O C to O M M M - M M to M c c O M O M. M- M U M M M c O M C ^ M O N * M M M c M C M _ M O C M. to O O C M M - M M O M t* m r. U M M C C M M *-». i M c c c M O O M M «-*M C M C M to M O X" M M «-* c «-* C M M O C M O.M to X to M A ' c O m o M M* ṀM M X M c M O <-»M M C M x c M mco mca M U c M * M c M O M c M O M. MM C M O M - M M M M C M O M C* M O M MM M W N ' C M O M O M M to M A M MC0 M - M M lj ^ j M c C M O C - o x c c *-» o M O C X «-»o c. x o M «C M X c M o M c X o c M O c M O c t* o X c c M O X c c X o c M O c c o c X o X M M.5 c M O M of Ą M c M c M O c c* o M c M O c M O M c M O c o» c M c M O c M O M to c X e> 01 c o X X T a b l i c e

![i U (2U ij0 221,,O,221.0, O.221,2 "Oj «,«3 5 ' O U l i l2uliu li 221 221 11 > * ( i 9 ) Wszystkie wzory podano w pracy [lo], niektóre z nich umieszczono w tablicy 1.](/docs-images/97/134045528/images/66-2.jpg "Analogicznie, jak dla wrażliwości 2 rzędu, wyprowadza się wzory na wrażliwości 3 rzędu modułu 1 fazy prostych funkcji układowych (np. T = UQ ) na zmiany parametrów xixjx^ i tak fioj.")
66 Obliczanie wrażliwości wyższych rzędów. 73 * i i 0 221,,0,.0,221 8 w8l " li 221 ^! i i, u uo.li 11 22i,.0,221 Ł 221.,0.221,.0, E w 9i = Uli 221 więc po przekształceniach i wykorzystaniu zasady międzywzajemności [l, 1<^ uzyskamy wzór na wrażliwość postaci: SU. i U (2U ij0 221,,O,221.0, O.221,2 "Oj «,«3 5 ' O U l i l2uliu li > * ( i 9 ) Wszystkie wzory podano w pracy [lo], niektóre z nich umieszczono w tablicy 1. Analogicznie, jak dla wrażliwości 2 rzędu, wyprowadza się wzory na wrażliwości 3 rzędu modułu 1 fazy prostych funkcji układowych (np. T = UQ ) na zmiany parametrów xixjx^ i tak fioj.3 3 J uol df i * i 6 l uo l. _ i J u o l, A 2 n uon uo 3 * 1 ' ~0-- * b U0 1 0xj " ^S 3' * 7 Sx * 1 2 xi xi x2 xi (20),u l t>.. 2 > 1.,. s l u» l (oy S 2, *2XJ 2 l Uol Ćx2 cfcj x2xj 2 xj x! 4- S i Uo1 «W * X \ * «V < M > i xi xj i j xi x* xj

 s Uo1 ou xixjx k 1 i k i)xi<)xj xixjx k x ixj * ~x k - s 1» 1 guo. s luol0 o. s W 0\"o. xixkxj XJ XJXk Xi xi xjxk XJ xi k k xixj X 1 XJ k Wzory dla złożonych funkcji układowych podano w pracy [lo].")
, - n obwodów podstawowych (n 0 '1, i = l,.")
67 74 J. Chojcan Q U0 df 1 p. Im(su0 }. s l-olq-o. s luol Q o. x2xj 2 1 i ć>x2ixj x2xj x2 XJ x ixj xi - = i U o,», \ - s J U o l«us X 0 )2. U <» ) xi i J J x* * X 1 XJ wreszcie s luol df XlX.1Xk a 3 luol. Re(su0 X + s luol 0\ u0 + x ixjxk IU01 B x i^xj fixk xixjxk xi xj x k S UoIq V S IU W * ^ QU0 * XJ X1 xk xk x i xk x ixj xk Un Un Un U + Q x X Q X + Q X X Q X ( 24> i k XJ XJ k xi 0U df x x X Ial(sU ) s Uo1 ou xixjx k 1 i k i)xi<)xj xixjx k x ixj * ~x k - s 1» 1 guo. s luol0 o. s W 0"o. xixkxj XJ XJXk Xi xi xjxk XJ xi k k xixj X 1 XJ k Wzory dla złożonych funkcji układowych podano w pracy [lo]. Tak więc dla obliczania wrażliwości małoprzyrostowej prostej funkcji układowej na zmiany, np. n parametrów metodę obwodów dołęczonych należy przeprowadzić analizę: - obwodu podstawowego N i dołęczonego N (wrażliwości 1 rzędu), - n obwodów podstawowych (n 0 '1, i = l,...,n) zasilanych przez SPM 1 A połączonę kolejno równolegle do każdego ze zmieniajęcych się elementów Jeśli Jest to dwójnik lub równolegle do gałęzi Sterowanych, jeśli zraisniajęcym się parametrem Je3t współczynnik sterowania źródła starowanego (wrażliwości 2 rzędu), - 1 obwodów podstawowych (gdzie 1 - liczba zmienlajęcych się współczynników sterowania źródeł sterowanych) 2 ssllenych kolejno przez SPM 1 A połęczonę równolegle do gałęzi sterujęcych zmieniajęcych się źródeł
 4.")

 i = 1 1 gdzie n - liczba parametrów obwodu uwzględnionych przy obliczaniu wrażliwości 1 rzędu, ti - odchyłka i-go parametru Po uwzględnieniu wrażliwości 1 1 2")
68 Obliczanie wrażliwości wyższych rzędów. 75 (wrażliwości 3 rzędu), czyli liczba niezbędnych analiz obwodu do obliczenia wrażliwości 1, 2 i 3 rzędu wynosi N» 2 + n + 1. (26) 4. Zastosowanie Oak już wspomniano wrażliwości wyższych rzędów mogę być wykorzystane również do lepszej aproksymacji funkcji układowych dla większych, niż to było możliwe przy uwzględnieniu tylko wrażliwości 1 rzędu, odchyłek wartości parametrów obwodu. Przeanalizujemy dokładność aproksymacji modułu funkcji układowej T. Gdy uwzględnione zostanę wrażliwości 1 rzędu wówczas odchyłka *'4Tl < ' *! (27) i = 1 1 gdzie n - liczba parametrów obwodu uwzględnionych przy obliczaniu wrażliwości 1 rzędu, ti - odchyłka i-go parametru Po uwzględnieniu wrażliwości rzędu odchyłka aproksymowana jest zależnościę» I n - E ^ i + E s v L v j 1=1 1 i=1 J = i 1 3 (28) gdzie m - liczba parametrów obwodu uwzględnionych przy obliczaniu wrażliwości 2 rzędu, t^ - odchyłka J-go parametru Xj. Analogicznie, gdy uwzględnimy wrażliwości 1, 2 i 3 rzędu
 (29) występuję w rażliwości")

 i równych (co do modułów) tolerancyjnych parametrów zależności (27) (28) (29) redukuję się do postaci t, n - at. (30) at + bt.")
69 O. Chojcan gdzie, o. ^iczba parametrów obwodu uwzględnionych przy obliczaniu w r a ż l i wości 3 rzędu, t, - odchyłka k-go parametru xk# Na uwagę zasługuje fakt, źe w zależnościach (28) (29) występuję w rażliwości modułów funkcji układowych a nie części rzeczywiste wrażliwości funkcji układowych. Analogicznie, jak dla w r a żliwości 1 rzędu, można i dla wrażliwości w y ższych rzędów zdefiniować kres górny wrażliwości małoprzyrostowych jako tę wartość odchyłki parametrów, dla której moduł względnej różnicy między odchyłkę funkcji układowej aproksymowanej zależnościę (27) (28) lub (29) a dokładna wartością tej odchyłki jest mniejszy od zadanej wartości e(e = 0,005; 0,01; 0,05; 0,1) [3, 7, l o ]. Dla najgorszych w arunków pracy (dla w r a żliwości 1 rzędu) i równych (co do modułów) tolerancyjnych parametrów zależności (27) (28) (29) redukuję się do postaci t, n - at. (30) at + bt. (31) IT I at + bt*1 + ct^ (32) Aproksymacja odchyłki jest przedstawiona w postaci potęgowego szeregu Taylora, więc uwzg lędnienie kolejnego wyrazu rozwinięcia zmniejsza resztę, czyli błęd aproksymacji. Oznaczmy dokładną wartość odchyłki modułu funkcji układowej przez t T wówczas kres górny w r a żliwości m ałoprzyrostowych można wyznaczyć z z a leżności : 1,1 - r1rl tf r I (33) dla wrażliwości 1 rzędu. (34) it t dla wrażliwości rzędu f* t 0 I * IfJ ~ ITI to! 1 IT I (35) dla wrażliwości 1, 2 i 3 rzędu.

 + (s0?*? sg G t.t + su t ) + O G 1 1 2 G 2 1 1 2 1 2 G2 s U t 3 + ps1! + s U r2r t2t s U t t 2 + s V 1 2 + % _2 1 2 > - +.")

70 Obliczenie wrażliwości w y ższych rzędów Zilustrujmy te wyniki prostymi, dla przejrzystości, przykładami. Bardziej złożone podano w pracy [loj. Przykład 1 Należy określić kres górny wrażliwości małoprzyrostowej dla wrażliwości 1, rzędu oporowego dzielnika napięcia eg jg2 dla najgorszych warunków pracy dzielnika (tj = tg1» t» -tq *2^ J óli napięcie wyjściowe T» UQ zbierane jest z G2, t «0 a nominalna wartości parametrów*: E «3 V, Gj 1 S, G2 0,5 S ' Odchyłka napięcia U0 dla najgorszych warunków pracy aproksymowana jest zeleżnościę tu " (Sg0ti + SG t2 ) + (s0?*? sg G t.t + su t ) + O G G G2 s U t 3 + ps1! + s U r2r t2t s U t t 2 + s V % _2 1 2 > Un Un U- U- u_ - (s 0 - s ) t + (s + s - sg G ) t 2 + G 1 2 G2 G2 1 2 * (<;U * «5 c;uo e U ^ Sr.2 _ -2r " _3' " y * - 5 * * G Stęd można obliczyć, że kres górny tolerancji t» tg «wynosi: - dla wrażliwości 1 rzędu t 3 e, - dla wrażliwości rzędu tg «sytef, - dla wrażliwości 1, 2 i 3 rzędu t 3 Y I* Y W tablicy 2 podano kresy górne tolerancji dla kilku wartości e. Tablica 2 tg dla wrażliwości rzędu: e = 0,05 e * 0,01 e = 0,05 e «0,1 1 0,015 0,03 0,15 0, ,212 0,3 0,671 0,949 1, 2 i 3 0,513 0,646 1,11 1,393



71 78 3. Chojcan Przykład 2 Dzielnik z poprzedniego przykładu zastąpiono dzielnikiem EGC. Nominalne wartości: E = 1 V, G = 1 S, co C = 1 S. Funkcja układowa T = UQ, gdzie UQ napięcie na zaciekach kondensatora. Kresy górne tolerancji i modułu napięcia UQ dla najniekorzystniejszych warunków pracy (t «tę ^ilku wartości e podano w tablicy 3. Tablica 3 tg dla wrażliwości rzędu: e = 0,005 e * 0,01 e 0,05 e «0,1 1 0,01 0,02 0,088 0, ,102 0,145 0,31 0,51 1, 2 i 3 0,215 0,27 0,428 0,52 5. Wnioski Wykorzystanie wrażliwości wyższych rzędów do zwiększenia dokładności aproksymacji lub rozszerzenia przedziału dopuszczalnych odchyłek parametrów przy stałym błędzie aproksymacji funkcji układowej budzi, ze względu na konkurencyjny w porównaniu z analizę wielkoprzyrostowę czas obliczeń, uzasadnionę nadzieję na ich szersze zastosowanie. Uwzględnianie wrażliwości wyższych, niż 3 rzędów nie wymaga dodatkowych analiz obwodu, wydłużaję się Jednak wzory końcowe. LITERATURA [1] Calahan D. : Projektowanie układów elektronicznych za pomocę maszyn cyfrowych, WNT, Warszawa [2 ] Chua L., Pen-M.L.: Komputerowa analiza układów elektronicznych, WNT, Warszawa [3] Stybliński M. : Metody analizy i optymalizacji tolerancji parametrów układów elektronicznych, WNT, Warszawa [4] Seth A.K., Roe P.H,: Higher Derivative Network Sensitivities Using Adjoint Network, Int. 3. Cir. Theory Appl., Vol. 1, (1973). [5J Richards G.A. : Second-Derivative Sensitivity Using the Concept of the Adjoint Network, El. Lett., 5, (1969). [ć] Goddard P.3., Spence R. : Efficient Method for Calculation of First and Secong-Order Network Sensitivities, El. Lett., 5, (1969). [7] Metody statystycznej i wrażliwościowej analizy i optymalizacji układów, Wydawnictwo Politechniki Warszawskiej, Warszawa [8] Chojcan 3., Lasek L. : Metody analizy wrażliwościowej układów elektronicznych, skrypt uczelniany Politechniki ślęskiej, wyd. II, Gliwice 1982.
![Obliczanie wrażliwości wyższych rzędów.. 79 [ 9] Chojcan 0. : Analiza wrażliwości wyższych rzędów. Materiały VI KKT01UE s. 156-161, Gliwice 1983. fio ł Chojcan D.](/docs-images/97/134045528/images/72-0.jpg ": Obliczanie wrażliwości wyższych rzędów. Raport wewnętrzny Instytutu Elektroniki, Gliwice 1983. Recenzent: doc. dr hab. lnż.")


72 Obliczanie wrażliwości wyższych rzędów.. 79 [ 9] Chojcan 0. : Analiza wrażliwości wyższych rzędów. Materiały VI KKT01UE s , Gliwice fio ł Chojcan D. : Obliczanie wrażliwości wyższych rzędów. Raport wewnętrzny Instytutu Elektroniki, Gliwice Recenzent: doc. dr hab. lnż. Michał Tadeusiewicz Wpłynęło do redakcji dnie 10 maja 1984 r. AHAJ1H3 'iybctbhtejibhocth MAJHX IIPHPAIHEHHii BHCHMX IIQIHAKOB P e 3 jo u e B c i a i b e n p e f l d a B j i e H a H a j t H 3 l y B c i B H i e z b H o c z z, u e i o A o u n p a c o e A H H b H H i c c o x e n, B i o p o r o h T p s i b e r o n o p s A K a. P a c c M a T p z B a e i c «n p z M e z e H z e e r o k a H a a z 3 y p a 3 f i p o c o B b h x o a o b 3 A e K T p o H H H x c x e u. I l p e A O i a B a e H U j j H c a e H H i i e n p a u e p H, SOLVING OF HIGHER ORDER NETWORK SENSITIVITIES AND THEIR APPLICATIONS S u m m a r y In the paper formulas for solving second and third order network sensitivities in the frequency domain and their application to the approximation of the transfer functions for larger change of parameters are given.



73 I ', ZESZYTY NAUKOWE POLITECHNIKI ŚLASKIEO - 19H Seria: ELEKTRYKA z. 95 ' Nr kol. 620 Andrzej DRYGA3Ł0 Instytut Elektroniki Politechnika leska DYSKRETNE OIAOYCZNE UKŁADY LINIOWE Streszczenie. W pracy przedstawiono opis dyskretnych układów liniowych niezmiennych względem przesunięcia diadycznego wykorzystujęc metodę odpowiedzi impulsowej. Wykazano, że diadyczne układy liniowe mogę być realizowane przez cyfrowe skalarne filtry sekwencyjnościowe za pomocę algorytmów szybkich transformacji. 1. Wprowadzenie Rozwój techniki cyfrowej, oparty na postępach technologii układów scalonych, stworzył potrzebę adekwatnej analizy i syntezy liniowych układów dyskretnych za pomocę algorytmów o minimalnej złożoności obliczeniowej. Znaczny postęp w tym zakresie można uzyskać na bazie teorii sekwencyjnościowej sygnałów Y), w której pod pojęciem sekwencyjność rozumiana jest uogólniona częstotliwość oznaczajęca jednę drugę liczby przejść przez zero funkcji Walsha w przedziale określoności. Punktem wyjścia do rozważań przeprowadzonych w niniejszej pracy sę następujęce znane stwierdzenia f2j : - matematycznę definicję u k ł a d u d y s k r e t n e g o jest jednoznaczne przekształcenie lub operator, który odwzorowuje cięg wejściowy jxj w cięg wyjściowy j y j : {y} - t [{x }] (i : - k l a s y u k ł a d ó w d y s k r e t n y c h określa się na podstawie właściwości T [-]. - klasę u k ł a d ó w l i n i o w y c h określa zasada superpozycji: Jeśli jyjj i 1^2] odpowiedziami układu odpowiednio na pobudzenia {x lj 1 {x2^ * t0 Jsst liniowy wtedy i tylko wtedy, gdy T[a { Xl} ł b{ X2}] " 3 T [{xi}] * b t [ { x2}] = 8{yi} ł b{ y2) dla dowolnych stałych a i b.
 punktach można wyrazić Jako sumę diadycznie przesuniętych i pomnożonych cięgów impulsowych N-l x(m) = tj(m n) x(n) (3) n*0 gdzie oznacza różnicę modulo 2, która jest równoważna sumie modulo 2")
 = ^ ^ < 5 ( m n) x(n) ^4) n=0 Przykładowo, wynik zastosowania operacji przesunięcia diadycznego dyskretnych sygnałów skończonych danych w N = 8 punktach")
 w połęczeniu z zależnościę (2) sugeruje, że układ liniowy można w pełni scharakteryzować za pomocę Jego odpowiedzi impulsowej.")
74 82 A. Drygajło 2. Splot dladyczny Dowolny skończony cięg jx(m) dany w i, = 2P (p» 0,1,2,...) punktach można wyrazić Jako sumę diadycznie przesuniętych i pomnożonych cięgów impulsowych N-l x(m) = tj(m n) x(n) (3) n*0 gdzie oznacza różnicę modulo 2, która jest równoważna sumie modulo 2 oznaczanej przez. Zatem opis równoważny ma postać N-l x(m) = ^ ^ < 5 ( m n) x(n) ^4) n=0 Przykładowo, wynik zastosowania operacji przesunięcia diadycznego dyskretnych sygnałów skończonych danych w N = 8 punktach przedstawia rysunek i. 1. Można zauważyć, że przesunięcie diadyczne skończonych cięgów netc x(n)j dla N = 2 P zachowuje ich podstawowe symetrie. Diadyczny sposób przedstawiania sygnałów (4) w połęczeniu z zależnościę (2) sugeruje, że układ liniowy można w pełni scharakteryzować za pomocę Jego odpowiedzi impulsowej. W szczególności niech g(m,n)j- będzie odpowiednię układu na cięg impulsowy (m n ), występujęcy dla m = n. Wówczas z zależności (l) i (4): -N-l y(m) = T X I '5 ^m n*0 x ^n \ Na podstawie równania (2) można napisać N-l N-l y(m) = ^ 7 j ( m n)l n)j x(n) = jjj g(m,n) x(n) (5) n=0 n=0 Zgodnie z zależnościę (5) odpowiedź układu na pobudzenie x(n) można wyrazić w zależności od odpowiedzi układu na cj(m n). Deśli narzucić tylko warunek liniowości, g(m,n) będzie zależeć zarówno od m jak i od n, a to bardzo ograniczy możliwości obliczenia wyrażenia (5). Znacznie bardziej użyteczne wyniki uzyskuje się, jeśli przyjęć dodatkowo warunek niezmienności względem przesunięcia diadycznego.



75 Dyskretne dladyezne układy liniowe 83 Rys. 1
j jest odpowledzię na pobudzenie jx(n)j, to jy(m k)j Jest odpowledzię na jx(n k)j. gdzie k Jest dodatnlę liczbę całkowltę [3], [4].")
 przyjmuje postać N-l y(m) «X ] 9(m n) x(n) n*0 (6 ) Równanie (6) nazywa się zwykle s p l o t e m.")
 uzyskuje się inne wyrażanie N-l y(\") - ^ x(m n) g(n) (7) E n»0 oznaczane")
76 84 A. Drygajło K l a s ę u k ł a d ó w l i n i o w y c h n i e z n i e n n y c h w z g l ę d e m p r z e s u n i ę c i a d i a d y c z n e g o charakteryzuje się przez właściwość. Ze Jeśli jy(m)j jest odpowledzię na pobudzenie jx(n)j, to jy(m k)j Jest odpowledzię na jx(n k)j. gdzie k Jest dodatnlę liczbę całkowltę [3], [4]. Właściwość niezmienności względem przesunięcia diadycznego nasuwa wniosek. Ze Jeśli jg(n)j Jest odpowledzię na j 6 (n)j, to odpowledzię na jd (m n)j Jest wprost g(m n)j. Tak więc zalezność (5) przyjmuje postać N-l y(m) «X ] 9(m n) x(n) n*0 (6 ) Równanie (6) nazywa się zwykle s p l o t e m. Jeśli jyj Jest cięgiem, którego wartości sę określone przez wartości dwóch cięgów jgj i {x} poprzez wzór (6) to mówimy. Ze jyj Jest s p l o t e m d i a - d y c z n y m jgj z jxj i oznaczamy to symbolem y 9 x Zamieniejęc zmienne we wzorze (6) uzyskuje się inne wyrażanie N-l y(") - ^ x(m n) g(n) (7) E n»0 oznaczane symbolem y «x g. Tak więc, kolejność w jakiej splata się dwa cięgi nie Jest ważna i odpowiedź układu y Jest taka sama. Jeśli role pobudzenia i odpowiedzi impulsowej zostanę zamienione, y Dwa układy liniowe niezmienne względem przesunięcia diadycznego połęczone kaskadowo tworzę układ liniowy, niezmienny względem przesunięcia diadycznego, o odpowiedzi impulsowej, która Jest splotem diadycznym Rys. 2 dwóch odpowiedzi impulsowych. Właściwość ta Jest pokazana na rys. 2 Z równania (6) lub (7) wynika takze, Ze dwa układy liniowe niezmienna względem przesunięcia diadycznego połęczone równolegle sę równoważne Jednemu układowi, którego odpowiedź impulsowa Jest sumę poszczególnych odpowiedzi Impulsowych. Pokazano na na rys. 3.
.")

77 Dyskretne diadyczne układy liniowe Realizacja dladycznych układów liniowych x Dek wynika z zapisu (6) równanie splotu diadycznego można wyrazić aaclerzowo: 1 - fl 2. (8 ) Rys. 3 g d z i e : - macierz kolumnowa odpowiedzi układu o wymiarach N x 1 1 elementach y(«>). - macierz kolumnowa wymuszenia układu o wymiarach 1 1 elementach x(n), - macierz dladyczna odpowiedzi Impulsowych układu o wymiarach N x N 1 elementach jj g(m n). Dladyczny układ liniowy Jest swego rodzaju przetwornikiem sygnału. przetwarzającym sygnał w e j ściowy xj na sygnał wyjściowy yj. 0 rodzaju tego przetwarzania. Jak wykazaliśmy, decyduje dyskretna funkcja odpowiedzi Impulsowej układu charakteryzująca całkowicie układ z punktu widzenia Jego zachowania zewnętrznego, tzn. zawierejęca dostateczna i n f o rmecję, aby na podstawie sygnału wejściowego wyznaczyć sygnał wyjściowy. Patrzeć na działanie układu diadycznego z widmowego punktu widzenia, można go traktować Jako przetwornik widma, przekształcający widmo eekwen- cyjnońclowe sygnału wejściowego w widmo sygnału wyjściowego zgodnie z charakterystyka sekwencyjnośclowa dana meclerza G [5]. Można to zapisać następująco t - (9) g d z l a : W - ortogonalne macierz Walsha o wymiarach N x N, W -1 - macierz odwrotna do macierzy W. Znajomość charakterystyki sekwencyjnościowej G wystarcza, aby znajęc widmo sygnału na wejściu układu wyznaczyć widmo sygnału na Jago wyjściu. Zatem N 1 n»0 n) x(n) fl G x (10) g d z l a : X - transformata Walsha sygnału x.

![Z właściwości dyskretnych funkcji Walsha oraz macierzy diadycznych wynika, że macierz G odpowiadajęca dowolnej macierzy diadycznej jest macierzę diagonalnę [ć] : G - w a w 1 - diag [g ( 0 ), G ( 1 ).](/docs-images/97/134045528/images/78-1.jpg "..G(N-l)] (12) x (0) x C1) x (2)- X (3) x( 4) x(5) X C6 ) x (7) 5 = dlag [ GCO),G(0 G(7)j g (o) g CD gc2) gc3) g (4) g (5) g (6) 9(7) g (D g co) g(3) g (2) g (5) g(4) 9(7) g (6) g(2) g (3) g(o) gci)")
 g(5) 9 (4) 9 CD 9(2) g C1) 9 (0). Rys.")
78 86 A. Drygajło oraz a - w-1 g w ( n ) W zależności od kształtu charakterystyki G układu pewne składowe sekwencyjnościowe widma sygnału wejściowego mogę być stłumiona, inne natomiast pozostawione bez zmian lub wzmocnione. Dyskretny układ liniowy niezmienny względem przesunięcia diadycznego można zatem traktować jako cyfrowy filtr sekwencyjnościowy. Z właściwości dyskretnych funkcji Walsha oraz macierzy diadycznych wynika, że macierz G odpowiadajęca dowolnej macierzy diadycznej jest macierzę diagonalnę [ć] : G - w a w 1 - diag [g ( 0 ), G ( 1 )...G(N-l)] (12) x (0) x C1) x (2)- X (3) x( 4) x(5) X C6 ) x (7) 5 = dlag [ GCO),G(0 G(7)j g (o) g CD gc2) gc3) g (4) g (5) g (6) 9(7) g (D g co) g(3) g (2) g (5) g(4) 9(7) g (6) g(2) g (3) g(o) gci) g(6) 9(7) g (4) 9(5) 9(3) g(2) 9 CD g CO) 9(7) g (6) g (5) g (4) g (4) 9 C5J g(6) g (7) g(o) gc1) 9(2; 9(3) g (5) qw g(7) gc6) g Cl) g (o) g (3) 9(2) g(6) gc7) 9(4) 9(5) gc2) 9(3) 9 (0) g (D gc 7) g (6) g(5) 9 (4) 9 CD 9(2) g C1) 9 (0). Rys. 4 Zatem dyskretny układ liniowy niezmienny względem przesunięcia dladycznego Jest skalarnym filtrem sekwencyjnościowym i charakteryzuje się tym, że Jeśli na Jego wejście podany zostanie sygnał będęcy dyskretnę funkcję Walsha, to odpowiedź układu też będzie dyskretnę funkcję Walsha o tej samej sekwancyjności. Dyskretny diadyczny układ liniowy opisany zależnościę (9) może być realizowany za pomocę algorytmów szybkiej transformacji Walsha w sposób podany na rys. 4 [ 5].


 y( ) x(3) ^ - < > ------ ~ o ^ ^ > 3 y(3) x(5) ^ -----o----y (5) G = dia g [ 1,1, 1/2, 1/2, 1/4 1/4, 1/4, 1/4 ] 1/2 1/4 1/8 1/8 0 0 0 0 1/4 1/2 1/8 1/8 0 0 0 0 1/8 1/8 1/2 1/4 0 0 0 0 1/8 1/8")
79 Dyskretne dladyczne układy liniowe 87 Ogólnie, złożoność obliczeniowa takiej realizacji wynosi 2Nlog2N operacji dodawania i odejmowania liczb rzeczywistych oraz N operacji mnożenia liczb rzeczywistych i Jest znacznie mniejsza od złożoności obliczeniowej układów dyskretnych niezmiennych względem przesunięcia i realizowanych za pomocę algorytmów szybkiej transformacji Fouriera [ 7]. Dyskretne układy liniowe niezmienne względem przesunięcia diadycznego aproksymujęce charakterystyki sekwencyjnościowe za pomocę elementów będących całkowitymi potęgami liczby 2 mogę wykorzystywać algorytmy szybkich transformacji bazujących na układach ortogonalnych funkcji trójwartościowych [8], 9]. Złożoność obliczeniowa takich realizacji jest mniejsza i wynosi Jedynie od 4(N-1) do 2Nlog2N-N operacji dodawania 1 odejmowania liczb rzeczywistych. Przykładową realizację przedstawia rys. 5. x ( ) y( ) x(3) ^ - < > ~ o ^ ^ > 3 y(3) x(5) ^ -----o----y (5) G = dia g [ 1,1, 1/2, 1/2, 1/4 1/4, 1/4, 1/4 ] 1/2 1/4 1/8 1/ /4 1/2 1/8 1/ /8 1/8 1/2 1/ /8 1/8 1/4 1/ /2 1/4 1/8 1/ /4 1/2 1/8 1/ /8 1/8 1/2 1/ /8 1/8 1/4 1/2 Rys Podsumowanie Największą zaletą przedstawionych w pracy układów liniowych niezmiennych względem przesunięcia diadycznego w porównaniu z układami liniowymi niezmiennymi względem przesunięcia jest ich lepsze przystosowanie do techniki cyfrowej. Dyskretne diadyczne układy liniowe wykorzystując algorytmy szybkiej transformacji Walsha mogą służyć do konstrukcji modeli układów dyskretnych aproksymujących układy liniowe niezmienne względem przesunięcia [loj. Pozwala to na efektywną identyfikację i syntezę systemów liniowych stacjonarnych [llj. Mogą być również zastosowane jako szyb
![88 A. Orygajło kie filtry cyfrowe do przetwarzania sygnałów [ 12], [l3], [14J.](/docs-images/97/134045528/images/80-0.jpg "Diadyczne układy liniowe bazujące na ortogonalnych funkcjach trójwartościowych o kazały się, ze względu na małę złożoność o b l i c z e n i o w ą, szczególnie dogodne do cyfrowego przetwarzania")
![sygnałów wielowymiarowych, w tym obrazów cyfrowych Qis], LITERATURA [ lj Harmuth H.F. : Sequency Theory - Foundations and Applications. A c a demic Press, New York 1977. [ 2 ] Oppenheim A.V.](/docs-images/97/134045528/images/80-1.jpg ", Schafer R.W. : Cyfrowe przetwarzanie sygnałów. WKŁ, Warszawa 1979. 3j Pichler F. : On State- Space Description of Linear Dyadic-Invariant Systems.")

80 88 A. Orygajło kie filtry cyfrowe do przetwarzania sygnałów [ 12], [l3], [14J. Diadyczne układy liniowe bazujące na ortogonalnych funkcjach trójwartościowych o kazały się, ze względu na małę złożoność o b l i c z e n i o w ą, szczególnie dogodne do cyfrowego przetwarzania sygnałów wielowymiarowych, w tym obrazów cyfrowych Qis], LITERATURA [ lj Harmuth H.F. : Sequency Theory - Foundations and Applications. A c a demic Press, New York [ 2 ] Oppenheim A.V., Schafer R.W. : Cyfrowe przetwarzanie sygnałów. WKŁ, Warszawa j Pichler F. : On State- Space Description of Linear Dyadic-Invariant Systems Proceedings "Applications of Walsh Functions", Washington O.C. AD , str [ 41 Chang O.K., Liu 0.0.: Time- Oomein A n alysis of Dyadic-Invariant S ystems. Proc. IEEE, vol. 62, no. 7, Ouly 1974, str [ 5 ] Beauchamp K. G. : Walsh Functions and Their Applications. Academic Press, London [ ć] Griffiths O. W. R., Stocklin P. L., C. van Schoonevald: Signal Processing. Academic Press, New York 1973j Pichler F. : Walsh Functions-Introduction to the Theory, str [ 7 ] Ahmed N., Rao K. R. : Orthogonal Transforms for Digital Signal Processing. S p r i n g e r - V e r l a g, New York [ 8j Drygajło A.: Zastosowania ortogonalnych funkcji trójwartościowych do analizy widmowej sygnałów dyskretnych. M a t e riały VI SPETO, Gliwice - Ustroń, , str [ 9 ] Drygajło A.: Zastosowanie szybkich trsnsformacji bazujących ns funkcjach schodkowych do przetwarzania sygnałów cyfrowych Jedno- i d wuwymiarowych. Praca doktorska. Politechnika śląska, Gliwice 1983, [lo l Pearl 0. : Optimal Dyadic Models of Time-Invariant Systems. IEEE Trans. Comp., vol. C-24, no. 6, Oune 1975, str [ll] Kulesza W. : Widmowa synteza systemów dyskretnych ze szczególnym uwzględnieniem systemów liniowych stacjonarnych. Dodatek do Biuletynu Nr 11 (351) WAT, Werszawa [12J Rumatowski K. : Zastosowanie d y s kretnych transformacji Walsha i Haara w algorytmach filtracji cyfrowej. W y d awnictwo Politechniki Poznańskiej, Seria Rozprawy nr 75, Poznań [13] Drygajło A., Ihnatowlcz 0.: Szybkie nlerekursywne filtry sekwencyj- ' nośclowe Jedno- i dwuwymiarowe. VI KK T O i U E, G l i w l c e - K o z u b n i k, , str [1 4 ] Harmuth H. F. : N o nsinusoldal Waves for Radar and Radio Communication. A c ademic Press, New York 1981, [1 5 ] Drygajło A., Ihnatowlcz 0.: On the Construction of Two-Dimensional Digital Filters by Fast Hadsmard-Haar Hybrid Transforms. VI European Conference on Circuit Theory and Design ( E C C T D ' 8 3 ), Stuttgart, 6-9 Sept. 1983, str Recenzent: doć. dr hab. inż. Kazimierz Mikołajuk W p ł y n ę ł o do redakcji dnie 10 maja 1984 r.


81 Dyskretne dladyczne układy liniowe 89 AHCKPETHHE flhmhue JHHEiiHHE CHCTEMhl P e 3» m e / B pao ote n p e A d ab jieh o oraioahhe AHCKpeiHttx HHBa'pHaHTHtoc cu e tom o ih o c h - TeibHO AHaAHoro cabhra AaneflHiix cu ciem n p a nomonpi MeTOAa MMnyjiBCHoii <fyhk- Uhh y K a a a a o, >110 AHaAHtie AHHegHhie OHCieMH 6hah peaah3 0BaHu. uh^pobumh OKa- ASpHHMH CeKBeHTHHMH $HAhTpaMH Ha 6a3e aarophtmob OHOTpHX npeocpa30- BaHHii, DISCRETE DYADIC LINEAR SYSTEMS S u m m a r y In the paper a description of discrete dyadic-shift-invariant linear systems using unit-sample response method is presented. It is shown, that the dyadic linear systems can be realized by digital scalar sequency filters based on the fast transform algorithms.



82 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 1985 Seria: ELEKTRYKA z. 95 Nr kol. 820 Piotr PACANOWSKI Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika Ślęska OYSKRETNA REPREZENTACJA UKŁADÓW W OPARCIU O ALGEBRY BANACHA Stroszczenie. W pracy pokazano, źe stosowana powszechnie w teorii układów dyskretnych transformacja Z Jest przekształceniem Gelfanda w odpowiednio skonstruowanej algebrze 8anacha. Pozwala to na zastąpienie transformacji Z ogólniejszym przekształceniem, którego właściwości są dowodzone za pomocę aparatu analizy funkcjonalnej. Został podany przykład ilustrujący użyteczność takiego podejścia. Wstęp W teorii układów dyskretnych powszechnie stosowana Jest transformacja Z. Posiada ona szereg własności, które są dowodzone na gruncie teorii funkcji analitycznych czy rzeczywistych. Artykuł ten ukazuje zwięzek transformacji Z z przekształceniem Gelfanda, którego własności można badać na gruncie analizy funkcjonalnej. Zwięzek ten pozwala na traktowanie sygnałów dyskretnych Jako punktów pewnej przestrzeni unormowanej, w której określone jest ponadto struktura algebry. Umpżllwia to wykorzystanie zarówno zależności geometrycznych, jak i algebraicznych do dyskusji tak złożonych obiektów Jakimi są zbiory cięgów sygnałów dyskretnych. Konstrukcja pewnej algebry Banacha: Niech Pp (n + ) będzie zbiorem sygnałów x(n) o następujących właściwościach n=0 Określamy w zbiorze Pr(N+ ) następujące działanie: (x + y)(n) = x(n) + y(n) (1) (otx)(n) =oc. x(n) /
 J«*t przestrzenia linlowę.")
 3 l x + y r «Ix r y. r ' Gdy x(n) jaat elaaantaa Pr(N+ ), to x(n)r_n jaat element««l (n + ) ( W. [2]).")
 z dzlałanieal określonymi wzorami (l) z norma okraślon«wzorem (2) Jaat przestrzenia Banacha (Pr (N+ ), 11.11 r).")
83 92 P. Pacanowski Zachodzi ponadto: ^T^ x(n) + y(n) r_n «= ^^jx(n) r-n ^ ~ y(n) r~n n-0 n*0 n«0 Wynika stad, że auaa elementów zbioru Pp (N+ ) jeet także elementem tago zbioru. Tok więc pp (N+ ) J«*t przestrzenia linlowę. Określamy w Pr (N+ ) następujący funkcjonał I I r ^~~l x(n) r" n«0 (2 ) Funkcjonał tan Jaat normę w Pr (N+ ), gdyż: 1 IIx IIp 0 < * x - ^oj 2 «OCX Ir Iot I. Ilx Ir Voce C. x «P r (N+ ) 3 l x + y r «Ix r y. r ' Gdy x(n) jaat elaaantaa Pr(N+ ), to x(n)r_n jaat element««l (n + ) ( W. [2]). Z zupełności przestrzeni (l (n + ),. I ) wynika zupełność (pr (N+ ). H. r ). Wnloaek : Zbiór Pr (N+ ) z dzlałanieal określonymi wzorami (l) z norma okraślon«wzorem (2) Jaat przestrzenia Banacha (Pr (N+ ), r). W Pr (N+ ) wprowadzamy mnożenie określona wzorem: xy(n) YZ x(n - m)y(m) (3) a e N Jaat ono odwzorowaniem Pp (N+ ) x Pp (N+ ) Pp (N+ ), gdyż y! I *y(n) r"n - YZ x ^n I r ~ n * n e N n e N m s N < Yi v(«> r-" YZ x(n - > r' (n"b) M N n c N ^ i y(m) r m. YZ x(n) r_n. o «N n N
 jest łęczne, liniowe ze względu na keżdy czynnik z osobna, rozdzielne i przemienne z mnożeniem przez liczby zespolone (własności splotu).")
![Posiada Jedność a ponadto a r» 1. (1 dla n > O O dla n > O Wniosek i Przestrzeń (Pr (N+ ),. r ) z mnożeniem określonym wzorem (3) tworzy komutatywnę algebrę Banacha z jednościę [l], [3].](/docs-images/97/134045528/images/84-1.jpg "Określenie przekształcenia Gelfanda w (Pf(N+ ),. r ).")
 można utożsamić z przestrzenię (pi/p(n4.)< II* II00)» gdzie.»» Sup x(n) rn.")
84 Dy s prezentacja układów. 93 Best ono także przemienne, a ponadto zachodzi: ll*y lr «S l x r. y r Mnożenie określone wzorem (3) jest łęczne, liniowe ze względu na keżdy czynnik z osobna, rozdzielne i przemienne z mnożeniem przez liczby zespolone (własności splotu). Posiada Jedność a ponadto a r» 1. (1 dla n > O O dla n > O Wniosek i Przestrzeń (Pr (N+ ),. r ) z mnożeniem określonym wzorem (3) tworzy komutatywnę algebrę Banacha z jednościę [l], [3]. Określenie przekształcenia Gelfanda w (Pf(N+ ),. r ). Definicja t Przestrzenię pj/r (N+ ) nazywamy zbiór wszystkich sygnałów, dla których Sup x(n) (i)"n < + 0» nen Twierdzenie: Przestrzeń sprzężonę do przestrzeni (Pr (N+),. r ) można utożsamić z przestrzenię (pi/p(n4.)< II* II00)» gdzie.»» Sup x(n) rn.ponadto fl N każdy liniowy funkcjonał zadany na pr(n+ ) określony Jest wzorem: h(x) «^ : H(n) x(n) H'(n)r-n x(n) n e N n «N gdzie H(n)e P ~ r (N+ ), H'(n)c L ~ < * + ). Dowód: Każdy cięg x(n)r n Jest elementem L(N+ ), a Jak wiadomo [l], [2J każdy funkcjonał liniowy zadany ne l(n+ ) ma postać: h(x) H'(n)r-n x(n) n t N+ gdzie H 1(n) «L0 0 (Nł). Wobec tago H 1(n)r n e ' co roćczy dowód.
 spełnia równanie funkcyjne: H' (n) s H'(m + n) H 1( ).")
 to wówczae H'(n) nie byłby elementem przestrzeni L \" ( n + ). Można też przeprowadzić bardziej formalny dowód.")
85 94 P. Pacanowski Oeżeli x, y Pp (N+ ), to h(x, y)» y,h'(n)r"n ) 'x(n-m)y(m) n e N i c N h(x, y) = y i,ih 1(n+m)x(n)r n y(m)r~" n t N m N Funkcjonał tan jest aultlpllkatywny wtedy 1 tylko wtedy, gdy L ~ ( N + ) spełnia równanie funkcyjne: H' (n) s H'(m + n) H 1( ). H'(n) (4 ) Cedynym rozwiązaniem tego równania w L (n + ) Jest rodzina H 1(n) n X c K(0, 1) (5) lub co Jeat równoważne: H 1(n) X n z e C \ K ( 0, 1) Gest to oczywlate, gdyż w przypadku, gdy Z > 1 (dle 5) to wówczae H'(n) nie byłby elementem przestrzeni L " ( n + ). Można też przeprowadzić bardziej formalny dowód. Wobec powyższego każdy homomorflzm (funkcjonał llniowo-multipllkatywny) określony na Pp (N+ ), taki że h(x) - y _ X n r_n x(n)» ^ \ n e N+ n e N+ Z~n x(n) można utożsamić z określonym punktem Z e C \ k (0, r), przy czym zbiór ten wyczerpuje wszyatkle tego typu funkcjonały. Przekształcenie Gelfande ([*] [3]) elementu x(n) e Pr(N+ ) ma postać x(z) = h(x) «y Z-n x(n), z e C \ k ( o, r) n e N+ Czyli przekształcenie Gelfanda danego cięgu przyporządkowuje mu Jego transformację Z. Przekształcanie Gelfanda Jest tutaj homomorfizmem algebry (Pp(N+ ),. r ) na podalgebrze wszystkich ograniczonych C-wartościowych funkcji zadanych na C \ k (o, r). Przykład zastosowania wyprowadzonych zwięzków:
 : A i (Z) r ł Z C \ K ( 0,r) } i0} algebra (Pr (N4 ),.")
![r ) Jest algebrę półprostę [lj, [3]. Ne mocy odpowiedniego twierdzenia analizy funkcjonalnej [lj odwzorowania x x(z) dla Z e C \ K ( 0, r ) Jest izomorfizmem, dbu.](/docs-images/97/134045528/images/86-1.jpg "Wnioski : Dzięki interpretacji transformacji Z Jako przekształcenie Gelfanda możemy w teorii układów dyskretnych stosować eparat analizy funkcjonalnej, co może znaczisie wzbogacić arsenał środków")
![dostępnych przy analizie czy syntezie układów dyskretnych, LITERATURA [1] Slwczyński M. : Zastosowanie algebr Banacha w teorii sygnałów i układów wielowymiarowych. Politechnika ślęska, Elektryka z.](/docs-images/97/134045528/images/86-2.jpg "81. [2] Musielak J. : Wstęp do analizy funkcjonalnej. Warszawa 1976, [3] Żelazko W.i Algebry Banacha. Warszawa 1967. [4] Nowomiejskl Z. : Transformacja Fouriera. Gliwice 1979. [5] Oury E.")
86 Dyskretna reprezentacja układów.. 95 Twierdzenie : Dis każdej transformaty Z istnieje Jednoznacznie wyznaczalns transformata odwrotna określona wzorem: x(n) > - i x'n ^(z), n N. n i + Nie istnieje dwe różne cięgi xn 6 Pr^N-t^ posladejęce tę se*ę transformatę Z. Dowód Ponieważ: Ker ( J *. ( x e P (N ) : A i (Z) r ł Z C \ K ( 0,r) } i0} algebra (Pr (N4 ),. r ) Jest algebrę półprostę [lj, [3]. Ne mocy odpowiedniego twierdzenia analizy funkcjonalnej [lj odwzorowania x x(z) dla Z e C \ K ( 0, r ) Jest izomorfizmem, dbu. Wnioski : Dzięki interpretacji transformacji Z Jako przekształcenie Gelfanda możemy w teorii układów dyskretnych stosować eparat analizy funkcjonalnej, co może znaczisie wzbogacić arsenał środków dostępnych przy analizie czy syntezie układów dyskretnych, LITERATURA [1] Slwczyński M. : Zastosowanie algebr Banacha w teorii sygnałów i układów wielowymiarowych. Politechnika ślęska, Elektryka z. 81. [2] Musielak J. : Wstęp do analizy funkcjonalnej. Warszawa 1976, [3] Żelazko W.i Algebry Banacha. Warszawa [4] Nowomiejskl Z. : Transformacja Fouriera. Gliwice [5] Oury E. 1 Transformacja Z i jej zastosowania. Warszawa Recenzent: doc. dr hab. lnż. Maciej Siwczyńskl Wpłynęło do redakcji dnia 2 maja 1984 r.


87 96 P. Pacanowski AHCKPETHbM AHCAMEJlb yctpohctb HA OCHOBAHHE EAHAXOBHX A JirEEP P e 3 lo m e B p a 6 o ie nokasaho, n o nphmehaemaa BoeoCme b TeopHH AHCKpeiHHX ycxpoitcib TpaHO(J)opMaiiHa Z flbjtaeicfl npeo6pa30bahheii rejihijiaiaa b ajirefipe EaHaxa. 3 to no3bajiset Ha 3aMeHy TpaHC<J>opMamiH Z fiojiee ocibhm npeo6pa30bahheu, CBoftCTBa KOToporo floka3hbajoich npa nomohh a n n a p a ia tjjyhkhhohajibhoro aaajih 3a. HpuBeAeH nphmep HajaooipHpyiomHfi nphroahoctt TaKoro noaxo^a. DISCRETE REPRESANTATION OF SYSTEMS BASED ON BANACH ALGEBRAS S u m m a r y In the paper it has been proved that the well known discrete Z transform is the Gelfand transform in a Banach algebra. The Z transform may be substituted by the more general transform whose properties are derived using functional analysis. The example has been given to present advantages of this approach.



88 ZESZYTY NAUKOWE POLITECHNIKI ŚLISKIEJ Seria: ELEKTRYKA z Nr kol. 820 Tadeusz GLINKA Instytut Maszyn i Urządzeń Elektrycznych Politechnika Śląska SILNIK PIEZOELEKTRYCZNY Streszczenie. Nowe materiały piezoelektryczne typu ceramicznego posiadają energetyczny współczynnik sprawności wynoszący kilkadziesiąt procent. Materiały te umożliwiają budowę elektromechanicznych przetworników energii - silników piezoelektrycznych. W artykule przedstawiono podstawy budowy 1 działania silnika piezoelektrycznego, przedstawiono takze model takiego silnika i podstawowe Jego charakterystyki elektromechaniczne. 1. Wst ęp Zjawisko powstawania indukcji elektrycznej w ciele stałym zachodzące pod wpływem naprężeń mechanicznych, nazywane w fizyce prostym efektem piezoelektrycznym, odkryli w 1880 r. bracia Pierre i Oacques Curie. Zjawisko powstawania odkształceń materiałów piezoelektrycznych pod wpływem pola elektrycznego, odwrotny efekt piezoelektryczny, został teoretycznie przewidziany przez G. Lippmana, a praktycznie potwierdzony przez braci Curie w 1881 roku. W praktyce po raz pierwszy kryształy piezoelektryczne zostały wykorzystane w 1917 r. do pobudzania fal akustycznych w wodzie. Odtąd rozpoczyna się okres stosowania kryształów piezoelektrycznych również w innych urządzeniach, np. w układach rezonansowych, generatorach o bardzo stabilnej częstotliwości zmian napięcia, filtrach o bardzo wąskim paśmie częstotliwości i innych. Coraz powszechniejsze stosowanie kryształów piezoelektrycznych Jest czynnikiem wymuszającym rozwój technologii ich otrzymywania, a także stymuluje poszukiwania coraz to nowych materiałów piezoelektrycznych. W układach i przyrządach elektronicznych wykorzystuje się kryształy kwarcu S i02, kryształy berlinitu A1P04 oraz kryształ nlobianu litu LiNbOj. Kryształy te cechuje duża stałość parametrów w czasie i w szerokim przedziale temperatury - natomiast mają niską sprawność przetwarzania energii w granicach 1% [l]. Drugą grupę materiałów piezoelektrycznych stanowią materiały c e ramiczne. Materiały te cechuje prosta technologia wytwarzania, pozwalająca uzyskiwać próbki o dowolnej wielkości i kształcie. Wadą tych materiałów Jest

![Wysoka sprawność stanowi głównę ich zaletę i stwarza możliwość w y k o rzystania tych materiałów do budowy elektromechanicznych przetworników energii [2, 3. 4, 5].](/docs-images/97/134045528/images/89-1.jpg "Konstruktorzy tych przetworników podaję szereg ich zalet : - duża stabilność prędkości obrotowej lub liniowej, - prosta b u d o w a w szczególności silnika liniowego, - proste układy zasilania i")

89 98 T. Glinka trudność otrzymywania ceramik o powtarzalnych parametrach oraz znacznie mniejsze w porównaniu z kryształami kwarcu, stabilność parametrów w czasie, a także większa zależność ich parametrów od temperatury. Ceramiki piezoelektryczne maję wysokę sprawność przetwarzania energii mechanicznej na elektryczna dochodzgca do kilkudziesięciu procent. Wysoka sprawność stanowi głównę ich zaletę i stwarza możliwość w y k o rzystania tych materiałów do budowy elektromechanicznych przetworników energii [2, 3. 4, 5]. Konstruktorzy tych przetworników podaję szereg ich zalet : - duża stabilność prędkości obrotowej lub liniowej, - prosta b u d o w a w szczególności silnika liniowego, - proste układy zasilania i sterowania, - niski poziom hałasów, jeżeli pracuję przy częstotliwościach ponad a kustycznych. w Instytucie Maszyn i Urzędzeń E l ektrycznych Politechniki śląskiej przeprowadzono także pewne wstępne prace dotyczęce przetworników elektromechanicznych piezoelektrycznych [2J. Z b u dowano model takiego silnika i przeprowadzono Jego badania, co w sposób krótki omówiono w tym artykule. 2. Rezonator piezoelektryczny Rezonator piezoelektryczny Jest to próbka materiału piezoceramicznego określonego kształtu z naniesionymi metalicznymi elektrodami. W przetwornikach elektromechanicznych stosowane sę rezonatory piezoelektryczne o kształcie prostopadłościanu lub pierścienia. W rezonatorze pod wpływem przyłożonego przemiennego pola elektrycznego wzbudzane sę drgania mechaniczne. Piezoelektryczny rezonator mechanicznie nieobclężony ( s w o b o d n y ), w pobliżu częstotliwości rezonansowej można przedstawić w postaci schematu zastępczego z elementami skupionymi (rys. 1). Pojemność CQ nazywana Jest pojemnością statyczna rezonatora, a parametry L, R, C parametrami dynamicznymi, przy czym rezystancja R reprezentuje straty mechaniczne w płytce. Charakterystyka modułowo-fazowa admitancji rezonatora piezoelektrycznego wynosi przy czym Y =. JcoC j-. G + JB (1) R + * > L + i k G o >2 C^R (l - o >2 LC)2 + (tocr)2
 1 jego elektryczny echemat z a stępczy (b) co C (1 -")
.")

90 Silnik piezoelektryczny. 99 Rys. 1. Rezonator piezoelektryczny (a) 1 jego elektryczny echemat z a stępczy (b) co C (1 - co2lc) B «coc >--- *----- K 0 (l - CO LC) + (tocr) i ma kształt zbliżony do okręgu (rys. 2). Charakterystyka ta może być wykorzystana dla identyfikacji parametrów schematu zastępczego: Maksimum admitancji Yfflax występuje w przypadku tzw. rezonansu szeregowego, to znaczy gdy: * sl + pr ć 0 (2)». * Imax + JW8C0 (3) Minimum admitancji Xm±n I " y 9t9PuJe > 9dy zechodzi tzw. rezonans równoległy: ^ r L (4)
 J")

 oblicza się R i C, a z S r u max")
91 100 T. Glinka 2* fr " w r,lcn * c Imln m 1 7 LC----- R ł cou ; - * & ) J i C + ^ r LC U0 c ii 1 J T T f o c0(c0 ł C) (5) Znając z pomiarów wykres modułowo- fazowy rezonatora, można określić metodę graficznę admitancje Y ax i Y«iln dla częstotliwości rezonansowych 1 f_. Z admitancli Y (równanie 3) oblicza się R i C, a z S r u max o admitancji Y, in (równanie 5) pozostałe dwa parametry płytki L I C.
, - określonę dla częstotliwości f-.")


92 Silnik piezoelektryczny Parametry schematu zastępczego można również obliczyć z innych punktów charakterystyki częstotliwościowej y (ł >), na przykład: B «(im Y) - określonę dla częstotliwości f.. ma x * ins x B = O - określonę dla częstotliwości f i B. = (im Y), - określonę dla częstotliwości f-. Biin ~ nii n * Dla płytki n i e o b c i ę ż o n e j, którę wykorzystano do budowy modelu silnika, zdjęto charakterystykę częstotliwościowe (rys. 2). W oparciu o tę charakterystykę wyznaczono parametry schematu zastępczego, które wynoszę: f = 16,221 khz fp = 16,755 khz R = l,084fl ; CQ» 4,97 JtF, C «0,32 xf L «17 mh. Parametry te mogę służyć do doboru generatora zasilajęcego oraz do obliczeń projektowych przetwornika elektromechanicznego. Płytki piezoelektryczne maję kilka pasm częstotliwości rezonansowych. Podane tutaj pasmo 16 khz Jest pierwszę częstotllwościę rezonansowę. Druga i wyższe częstotliwości rezonansowe leżę w paśmie znacznie wyższym od częstotliwości akustycznej. Stęd też sę częściej wykorzystywane w przetwornikach elektromechanicznych z uwagi na minimalne zakłócenia akustyczne. 3. Piezoelektryczne przetworniki elektromechaniczne Energia elektryczna dostarczana do płytki piezoelektrycznej jest zamieniana pod wpływem pola elektrycznego na energię drgań mechanicznych. Problem konstrukcji przetwornika elektromechanicznego piezoelektrycznego sprowadza się do zamiany tych drgań w ruch obrotowy lub liniowy. Obecnie w konstrukcji silników piezoelektrycznych można wyróżnić trzy typy [3]: - silniki piezoelektryczne z aktywnym stojanem i pasywnym wirnikiem, - silniki piezoelektryczne z aktywnym wirnikiem i pasywnym stojanem, - silniki piezoelektryczne z aktywnym wirnikiem i aktywnym stojanem. Zaprezentowany tutaj zostanie silnik z aktywnym stojanem i pasywnym wirnikiem. Schemat kinematyczny tego silnika podano na rys. 3. Układ pokazany na rys. 3 poddany jest działaniu następujących sił: F^ - siły docisku płytki do wirnika, P - siły ciężkości płytki, Fs - siły reakcji w punkcie zamocowania płytki, F (t) - siły napędzającej.
 - Fo sing>t (6 ) Oeśli płytka piezoelektryczna Jest zamocowana wahliwie, to z równania m o mentów")
 W punkcie styczności płytki piezoelektrycznej i wirnika działaję dwie siły wypadkowet - siła styczna; F 8 (t) «Fn (t)slnoc- (Frf + j P)sin/$ ( 8) - siła normalna : N ( t ) «Fn ( t ) c o s «+")
93 102 T. Glinka Rye. 3. K i n e matyczny schemat silnika piezoelektrycznego W e k t o r y s ił Fd, P, F#, Fp na rye. 3 narysowane sę linię cięgłę. Siły Fd, p, Fg sę siłami stałymi w czasie, natomiaat siła Fn Jest siłę zmiennę sinusoidalnie F (t) - Fo sing>t (6 ) Oeśli płytka piezoelektryczna Jest zamocowana wahliwie, to z równania m o mentów działajęcych w punkcie styku płytki z wirnikiem możne obliczyć, że F.? P (7) W punkcie styczności płytki piezoelektrycznej i wirnika działaję dwie siły wypadkowet - siła styczna; F 8 (t) «Fn (t)slnoc- (Frf + j P)sin/$ ( 8) - siła normalna : N ( t ) «Fn ( t ) c o s «+ (Fd + j P)cos/!i (9) Wektory siły % ( * ) 1 N (*) na rv narysowane linię przerywanę. Na rys. 3 pokazano siły Fg(t) 1 N(t) działajęce na płytkę piezoelektrycznę. Identyczne siły o zwrotach przeciwnych będę działać na wirnik. Pod wpływem siły [ - % ( * ) ] będzie odbywał się ruch wirnika. W p rzedziałach czasu, w których płytka się wydłuża i siła napędzajęca ma wartość dodatnię przy odpowiednim kęcle oc, istnieje możliwość spełnienia warunku: i?t N(t) > Fg (t)

 O oraz pt * sin<*0 (ll) a także bioręc pod uwagę, że wartość -yt J«st mała 0,1 można założyć, że 1 S cosoco.")

94 Silnik piezoelektryczny 103 gdzie 7 t - współczynnik tarcia 1 wówczas mamy do czynienia z ruchem płytki 1 ruchem wirnika bezpoślizgowym. Z warunku tego można obliczyć kęt oc styku płytki z normalna do powierzchni wirnika, przy którym nie występuje poślizg. Kęt ten określamy dla amplitudy siły n a pę d zajęcej, to Jest dla chwili ^ Fn (tl> Fo Oznaczajęc Fh +? P & = d p (10) O oraz pt * sin<*0 (ll) a także bioręc pod uwagę, że wartość -yt J«st mała 0,1 można założyć, że 1 S cosoco. (12) Przy tym założeniu otrzymuje się wyrażenie na określenie kęta styku oc, przy którym nie występuje poślizg, to Jest przy którym prędkość liniowa płytki piezoelektrycznej przy jej wydłużaniu się Jest równa prędkości obwodowej wirnika. OC» arcsin sin(/$ + 0CQ )J + cco (13) Można również określić optymalny stosunek siły docisku i amplitudy siły napędzajęcej sin(oc - cc ) * i T ń t ^ T J ot W półokresach drgań płytki, przy których długość płytki piezoelektrycznej zmniejsza się. kierunek siły napędzajęcej Fn (*) zmienia się na przeciwny Fn^*) co powoduje zmniejszenie się siły normalnej N(t). Gdy n (t) zmniejszy się do zera, wówczas następl oderwanie roboczego końca płytki piezoelektrycznej od powierzchni wirnika (rys. 4). N(t2 ) * F ^ (12)cos cc + (Fj + j P)coa/i = O (15)
 płytki piezoelektrycznej")
 * K ł 1 si Natomiast ponowny styk płytki i wirnika następi w")
 - arcsin Fd ; cos& r~ O CO S OC Czas styku płytki")
95 104 T. Glinka Rys. 4. Przebieg czasowy siły napędzającej Fn (t) płytki piezoelektrycznej przy jej blokadzie mechanicznej s tęd Fd * 2 P cos i sinwt2 - p. O 2 o) * K ł 1 si Natomiast ponowny styk płytki i wirnika następi w czasie narastania w chwili tj. gdy N(tj) = O (rys. 4). N(t) - arcsin Fd ; cos& r~ O CO S OC Czas styku płytki piezoelektrycznej z wirnikiem ' i * - ' 2 przy czym czas oderwania się końca płytki od wirnika



96 Silnik piezoelektryczny Opis modelu silnika Szkic konstrukcyjny modelu silnika pokazany Jest na rys. 5, a na rys. 6 zdjęcie zbudowanego modelu. Elementem aktywnym jest prostopadłościenna Rys. 5. Szkic konstrukcyjny silnika piezoelektrycznego płytka piezoelektryczna 1 z metalicznymi elektrodami napylonymi na jej dwóch przeciwległych powierzchniach bocznych. Wielkość płytki warunkowała wybór konstrukcji silnika. Płytka piezoce- ramiczna umieszczona jest w metalowej obejmie 4 i odizolowana jest od niej folię mikanitowę. Obejma łęcznie z płytkę umieszczona Jest wahliwie w,,.. -,, Rys. 6. Silnik piezoelektryczny - widok ogólny trzymadle 2 zamocowanym na podstawie 3. Trzymadło jest blokowane śrubę 9 i można go przesuwać, zmieniajęo w ten sposób kęt przyłożenia płytki do w i r nika. Koniec roboczy płytki piezoceramicznej zakończony Jest nasadkę ze stali twardej i oparty Jest na wirniku stalowym 8. Wirnik osadzony jest na wałku 7, który Jest ułożyskowany za pomocę łożysk ślizgowych saraocentrujęcych się w obudowie 6. Urzędzenie dociskajęce roboczy koniec płytki piezoelektrycznej do wirnika składa się z prowadni-

k H z.")

97 106 T. Glinka V \ ) Rys. 7. Schemat układu zasilającego 6ilnik piezoelektryczny cy 5. sworznia 11 i tarczy 10, no którą stawia się ciężarek F^. Do elektrod płytki piezoelektrycznej przylutowane sę przewody 12 doprowadzajęce napięcie. Schemat układu zasilajęcego silnik piezoelektryczny pokazany jest na rys. 7. Układ ten wymaga generatora o parametrach: około 100 W, ( )V, ( 40-60)kHz oraz mierników prądu, napięcia i mocy przystosowanych do pracy w paśmie częstotliwości (40-60)kHz. Z uwagi na brak w naszym laboratorium generatora o takich parametrach, badania zostały przeprowadzone w paśmie pierwszej częstotliwości rezonansowej płytki, to jest (15-17)k H z. Układ ten z uwagi na transformator dopasowujący Tr nie mógł być wykorzystany w pasmach wyższych częstotliwości rezonansowych. Nie m i e liśmy również rozwiązanego zagadnienia pomiaru mocy, co zubożyło pomiary, gdyż nie można było określić np. sprawności silnika. W tym układzie pomiarowym pomierzono charakterystyki: - prędkości obrotowej w funkcji momentu obciążenia n = f(m) przy U = const i f = 16,3 khz i F^ = 4 N, - prędkości obrotowej w funkcji napięcia n = f(u) przy M «const i f = 16,3 khz i Fd = 4 N. - prędkości obrotowej od siły docisku n = f(fd ) przy U = 100 V, f = 16,3 khz i M = const, które przedstawiono na rys Wnioski Badania wykazały, że istnieje możliwość w y korzystania m ateriałów piezoelektrycznych do budowy przetworników elektromechanicznych. Z uwagi na brak w naszych laboratoriach źródeł zasilania o wysokiej częstotliwości i dużej mocy. badania były prowadzone przy dolnej częstotliwości rezonansowej płytki, to jest 16,3 khz. Częstotliwość zalecana do zasilania silnika winna mieścić się w przedziale częstotliwości ultradźwiękowych (20-200) khz. Brak watomierza uniemożliwił wykonanie pełnego zakresu badań c h arakterystyk e l ektromechanicznych silnika W literaturze [ 5] podane są dane

![i "[o^/min] 60.](/docs-images/97/134045528/images/98-1.jpg ". 0 gem 40")

98 Silnik piezoelektryczny 107 O gem 40 gem BO g c m i "[o^/min] gem 40 gem ~ ' fd M Rys. 8. Charakterystyki silnika piezoelektrycznego


.")
99 108 T. Glinka Podstawowe dane silników piezoelektrycznych Tabela 1 Typ silnika U V f khz n obr/min M 10-3 Nm Gabaryt mm Mass kg DPE-01, WL/ x13x6 0,005 DPE-0,4, WL/ x24x20 0,035 DPE-0,4, W L / ,5 52x24x20 0,035 DPE-1,5, WL/ x40x30 0,080 DPE-0.75, NL/ $ 44x10 0,080 DPE-0,4, NL/ x70x10 0,150 silników piezoelektrycznych, które zostały opracowane i są wytwarzane w Politechnice Kijowskiej - tabela 1. Największy silnik skonstruowany w tym ośrodku posiada moment o brotowy na wale 10 Nm przy 48 obr/min, co daje moc obciążenia 50 W, Natomiast jeśli chodzi o prędkość obrotową, uzyskano górną granicę obr/min. Przewiduje się Jednak, że największe z a s t o sowanie tych silników będzie w zakresie małych mocy (ok. 3 W). W zaletach tego typu silników podkreśla się: - prostotę budowy, - niepalność, - można dopuścić wysoką temperaturę pracy (kilkaset stopni C), - cały silnik może być wykonany z elementów niemetalowych (materiały ceramiczne, szkło, tworzywa sztuczne), - parametry i charakterystyki silnika są znacznie korzystniejsze niż silników elektromagnetycznych, między Innymi silniki te cechuje duża stabilność i równomierność prędkości obrotowej, stąd przeprowadza się próby ich stosowania w v i d e o m a g n e t o f o n e c h, rejestratorach magnetycznych itp, LITERATURA ClJ W s t ę p do piezoslektronikl. Praca zbiorowa. WNT, Warszawa [ 2] Migurski P., Pietrzyk W. : Wykorzystanie efektu piezoelektrycznego do budowy przetworników elektromechanicznych. Praca dyplomowa. Politechnika Śląska, Instytut Maszyn i Urządzeń Elektrycznych, Gliwice [3] Vishnevski V.S., Lavrinienko V. V. : A piezo-electric Motor. Patent USA Nr , patent U.K. Nr , patent Francja Nr , patent Canada Nr [4 ] Trofimow A.I., O e w m j enjenko W. W. : Liniejnyje piezoeljektriczeskije mikrodwigatjeli. Eljektriczjestwo r. Nr 5. [5] Ławrinjenko W.W., WisznJewskiJ W.S., Bojczjenko O.Ł., Hadkjernicznyj S.P., Szuljrjenko A. P. : Piezoelj ekt ricz j eskij dwigatjel. Eljektriczjestwo 1981 r. Nr 6. Wpłynęło do redakcji dnie 2. V r. R ecenzent: doc. dr inż. Oerzy Hickiewlcz



100 Silnik piezoelektryczny 109 ITbE303JIEKTHlHi»KHii flbhratejib P e 3 io u e HoBue ni>6303jibkiphheckhs uatepaa^u KepaMHHecKoro nporchozmehhh miexii 3HepreiHuecKHil K0 3<M>HUHeHT rxoaeshoro AeitoiBHfl HecKOJifcKo xecaikob upousht 9t h waiephajih ^act b o 3m o j c h o c t b oipoehhh BJieKTpoMexaHnnecKHX npeoopa30baiejieil 3HeprHH-ni.e303aeKTpH'iecKHx ABaraiexea. B ciatbe npejuioxehti o c h o b h no- CTpo&KH h AeScTBHH nte303jiekiphaeckoro ibhraieia, a Taxxe nphbsaehh Moaejib Taxoro- XBHraiejifl h pe3yjn>taibi skcnephmehtajibhhx HcnuTaHHfi noxynehkbie aa 3X0«MOflejIK. PIEZO-ELECTRIC MOTOR S u m m a r y New piezoelectric ceramic materlale give the poeeibility of energy traneformetion with efficiency of some scores of per cent. These materials clear a w ay for construction of electromechanical transformers. In the paper the principles of construction and action of piezoelectric motor are given. There is also presented a working model of such a motor and Its testing results.



101 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ Seria: ELEKTRYKA z Nr kol. 820 Krzysztof KLUSZCZYŃSKI Instytut Maszyn i Urządzeń Elektrycznych Politechnika śląska HARMONICZNE PRZESTRZENNE PRZEPŁYWU W MASZYNACH ASYNCHRONICZNYCH Streszczenia. W wielofazowych symetrycznych uzwojeniach maszyn asynchronicznych można rozłożyć wektory napięć i prądów fazowych na składowe, wytwarzające określone ciągi harmonicznych przestrzennych przepływu. W k-osiowym układzie współrzędnych składowe te odpowiadają parom współrzędnych lub pojedynczym współrzędnym. W stanach ustalonych wiążą się ze składowymi symetrycznymi. Model matematyczny uzwojenia w k-osiowym układzie współrzędnych nazwany schematem rozkładu uzwojenia wielofazowego na uzwojenia elementarne w bezpośredni sposób pozwala wyznaczać widmo krzywej przestrzennej przepływu przy różnym zasilaniu i różnych połączeniach faz. 1. Rozkład ortogonalny wektorów prądów 1 napięć fazowych maszyny asynchronicznej w stanie nieustalonym W pracach j^2j, 3] wykazano. Ze w wielofazowej symetrycznej maszynie asynchronicznej o gładkiej szczelinie powietrznej i liniowym (nienasyconym) obwodzie magnetycznym jest możliwy rozkład ortogonalny wektorów prądów i napięć fazowych stojana, i wirnika na składowe, generujące określone cięgi harmonicznych przestrzennych przepływu (poją magnetycznego) w szczelinie powietrznej maszyny. Rozkład ten szczególnie dogodnie można przedstawić w k-osiowym układzie współrzędnych, wprowadzanym za pomocą macierzy transformacji: coso cos <K sino sin W cos2 cc sin2 oc cos(m-l)c# sin(m-l)a:., * * \m co ^ cos 75 ctco s2... cos(m-l) ^ (X sino sin pck... sin(m-l)2^- a: (1) 1_ 1_ ' 1_ 1_ V2 V2 Í2 V2V2 gdy ra = liczba nieparzysta,lub
oc coso r * costj sino sin(f 1 1 Vi V2 1 1 V2 V2 cos2(j - 1 ) «... cos(m-l) - l)oc 8ln2(^ - l)oc.")
 gdy g d zie: liczba parzysta, m - liczba faz uzwojenia, _ 2JT * \" albowiem poszczególnym składowym")
![rozkładu ortogonalnego odpowiadają wówczas pary lub pojedyncze współrzędne >>],(k) 1 (k) 2 w (k) 3 0 0 0 0 0 0.](/docs-images/97/134045528/images/102-2.jpg ". w (k) 4 0 +... +. w (k) m-2 w (k> 10 1 0 0 0 (k). m. i10,(k) *2 (k) 3 (k) 4 (k) m-2 (k) a-l (k) składowa «j, w k^ składowa w.")
102 112 K. Kluszczyński O ooo sino cos <x sin<x cos2oc sln2cc... coe(m-l)<x:... sln(m-l)oc coso r * costj sino sin(f 1 1 Vi V2 1 1 V2 V2 cos2(j - 1 ) «... cos(m-l) - l)oc 8ln2(^ - l)oc... sin(m-l)(s _ i)a 1_ 1_ V2 Y2 1_ 1_ Y? Tl2 ( 2 ) gdy g d zie: liczba parzysta, m - liczba faz uzwojenia, _ 2JT * " albowiem poszczególnym składowym rozkładu ortogonalnego odpowiadają wówczas pary lub pojedyncze współrzędne >>],(k) 1 (k) 2 w (k) w (k) w (k) m-2 w (k> (k). m. i10,(k) *2 (k) 3 (k) 4 (k) m-2 (k) a-l (k) składowa «j, w k^ składowa w. (k) J**2 (k) Si _(k). (k) (k) składowa w a - l 1 ; J-iii * 1 k -5- s kład owa w. a+1 (3) gdy a liczba nieparzysta,
 składowa w. + 1 gdy m» liczba parzysta.")
. 2. Rozkład ortogonalny wektorów prądów 1 napięć fazowych maszyny asynchroniczne!")
 1 a - 1 a\"'2 a - 3... a -1 ł). 1 a - 2 a - 4 a\"*6... a2 2 * ( D i 1 a\"\"3 a\" 6 a\" 9... a3 *3 : \" Vm m m e * (5) ; <» 1 1 1 1... 1. V gdzie a» e^05.")
103 Harmoniczne przestrzenne przepływu. 113 lub "i,<k> 2 (k) *3 (k) składowe składowa Wj, w(t) - W * 1^ 3 0 w j ^ e J wj)k ) (t) = * ^ 1)e3Ł, t + W ^ e 3 0 * «( O - l * «, 3^ e 3\"*' (7) / ro k^ (t) «i2 Re HP W ^ e gdy m = liczba nieparzysta lub w ^ ( t ) «W ^ e 3 0 + e 3 0")

 wytwarzanych w stanie nieustalonym przez poszczególne składowe rozkładu ortogonalnego (zespolone i rzeczywiste współrzędne k-osiowe) oraz w stanie ustalonym")
104 114 K. Kluszczyński w<k)(t) - W * 1^ 3 0 w j ^ e J wj)k ) (t) = * ^ 1)e3Ł, t + W ^ e 3 0 * «( O - l * «, 3^ e 3"*' (7) / ro k^ (t) «i2 Re HP W ^ e gdy m = liczba nieparzysta lub w ^ ( t ) «W ^ e e 3 0 " m ^ (t) - W' ' e3 e 0 + VTi; e 0 (7)? - l w < k>(t) m-^f Re w^1^«3 0 2 w n i k)(t) 1(2 Re W m (l^e3 gdy m liczba parzysta. Każda składowa 2-wyalarowa rozkładu ortogonalnego jest określona przez dwie składowe symetryczne, ześ 1-wymlarowa - przez Jedn; składów; symetryczn;. 3. Schemat rozkładu uzwojenia wielofazowego na uzwojenia elementarne Podsumowaniem przedstawionych rozważań jest tabela 1, w której zestawiono cięgi harmonicznych przestrzennych przepływu (pola magnetycznego w szczelinie powietrznej) wytwarzanych w stanie nieustalonym przez poszczególne składowe rozkładu ortogonalnego (zespolone i rzeczywiste współrzędne k-osiowe) oraz w stanie ustalonym przez poszczególne składowe symetryczne. Tabelę tę dogodnie można ujęć w formę tablicy, której wiersze odpowiadaj; składowym ortogonalnym rozkładu (3), (4), zaś kolumny - rzędom harmonicznych przestrzennych przepływu. Liczba wierszy równa się liczbie składowych rozkładu ortogonalnego (liczbie zespolonych i rzeczywis-



105 Harmoniczne przestrzenne przepływu Tabela 1 Cięgi harmonicznych przestrzennych przepływu generowane przez poszczególne składowe r.ozkładu ortogonalnego, współrzędne k-oslowe 1 składowe symetryczne w s p o f r z e d n e z e s p o l o n e s k t b d o w e c i o g k - o s i o w e w s p ó f k - o s i o w e s y m e t r y c z n i r z ę d y h a r m o n i c z n y c h p r z e s t r z e n n y c h p r z e p t y w i j (t) 1» i w ' «i W 1 0 W * * '. 1 i m - i 1, m - 1, m «1, 2 m - 1, 2 m * 1, 3 m - l, 3 m * w rt w ' w W 2 VIi M 2 ł " m - i 2. m - 2, m» 2, 2 m m 2, 3 m - 2, 3 m» 2..., 1 m -1 ~ 2 w ' z " i i, («1 * m -1 T m -1 m. l _ m - 1 m -1. m -1, m -1 ~ * - > 3 m m - j m - j g 0 2. T 2 m *1 T w M m w m m, 2 m. 3 m, A m... g d y m = 1. n i e p a r z y s t a w f ( M 1 w 2 * 1 1 m - 1, m * 1, 2 m - 1, 2 m * 1, 3 m - l, 3 m» ; m. i 1 (» w. l w " ",» 1-2» f - t - ^ - 1, ^ " * 1. r n * ę * 1> 2 m - y» 1, 3 m «- y - l. S m - y * 1. m T u/ m -1 ( 0 w ę y, m, m, m... f M w (rt m W i m. 2 m, 3 m, A m... gdy m : l. parzysta tych współrzędnych k-osiowych), zaś liczba kolumn - rzędowi najwyiszej uwzględnianej w analizie harmonicznej przestrzennej. Dla przykładu przedstawiono tablice dla 6- i 7-fazowego uzwojenia, uwzględniajęc w obu przypadkach 16 kolejnych harmonicznych przestrzennych (rys. 1, 2). Tablice te odpowiadaję modelowi matematycznemu uzwojeń w k-osiowym układzie współrzędnych [3]. Znak _1 symbolizuje symetryczne uzwojenia 2-fazowe o prostopadłych i lewostronnie zorientowanych osiach faz, znak L - uzwojenie 2-fezowe o prawostronnej orientacji osi faz zaś znak I - uzwojenie jednofazowe. KaZde z tych 2- i 1-fazowych uzwojeń posiada sinusoidalny rozkład krzywej układu prędowego i może wytwarzać tylko jednę harmoniczne przestrzenne przepływu o rzędzie równym numerowi kolumny. Uzwojenia takie będziemy nazywali uzwojeniami elementarnymi. Odpowiada Jęce sobie fazy uzwojeń elementarnych, zajmujęcych tan sam wiersz sę

 0 i on 0 ł-")

106 116 K. Kluszczyński r*» j n > ID n l/ł Vl f*ł CS n - j o n j CTł 00 n n U3 l/ł j -ł _i m o c 1. (D 4-> co E H C m»» m n 0 1 N 3 <N 0 C O O) 0 i on 0 ł- n j j - J O 1«O 5 - Oł 0 n 01N 3"O0 rm N Oi. p E 0XOcn H 0 >* CC n i f" ID l/ł ca n OJ n >» co j _j _J n Rys. 2. Schemat rozkładu uzwojenia 7-fazowego na uzwojenia elementarne - n - n y i s. s i j v V Y V i 5 V V V
, (4 ).")

107 Harmoniczne przestrzenne przepływu szeregowo (galwanicznie) połęczone i zasilane kolejnymi współrzędnymi k-osiowymi wektora napięcia. Wszystkie uzwojenia elementarna z danego wiersza tworzę uzwojenie zastępcze dla odpowiedniej składowej rozkładu ortogonalnego (3), (4 ). Uzwojenia elementarne układaję się w obrębie tabeli w cyklicznie powtarzajęcy się charakterystyczny kształt litery V. W przypadku nieparzystej liczby faz wierzchołek litery V Jest spłaszczony. Ta regularność w budowie tabel pozwala na ich sporzędzanie w sposób mnemotechniczny. Będziemy Je nazywać dalej schematami rozkładu uzwojeń na uzwojenia elementarne. Ze schematu rozkładu uzwojenia wielofazowego na uzwojenia elementarne wynika następujęcy zasadniczy wniosek: wielofazowe uzwojenie symetryczne, (którego poszczególne fazy generuję wszystkie harmoniczne przestrzenne przepływu), zasilane kolejnymi składowymi rozkładu ortogonalnego wytwarza pola magnetyczne w szczelinie powietrznej maszyny o rozrzedzonym widmie 1 róznym rzędzie najniższej harmonicznej przestrzennej. Widmo to Jest tym rzadsze, im wyższa Jest liczba faza uzwojenia m. Tak więc zarówno w stanie ustalonym Jak i nieustalonym, można poprzez odpowiedni dobór składowej napięcia zesilajęcego uzwojenie wytwarzać w szczelinie powietrznej pola magnetyczne o różnej liczbie par biegunów i w różny sposób odkształcone przez wyższe harmoniczne przestrzenne przepływu. Przedstawione wnioski leżę u podstaw teorii uzwojeń maszyn elektrycznych m.in. w syntetyczny i przejrzysty sposób opisuję mechanizm generowania wielobiegunowych pól magnetycznych przez uzwojenia wielofazowe. 4. Przykład Rozważmy uzwojenie, złożone z 6 Jednakowych grup, które traktować będziemy umownie jako uzwojenie 6-fazowe. Zakładamy najogólniejszy przypadek, a mianowicie, że pojedyncza grupa wytwarza wszyatkie kolejne harmoniczne przestrzenne przepływu (w rzeczywistości niektóre harmoniczne przestrzenne mogę nie wyetępić na skutek zerowania się współczynnika skrótu lub grupy). Schemat rozkładu uzwojenia 6-fazowego na jjzwojenie elementarne przedstawia rys. 1 (rzęd najwyższej uwzględnionej harmonicznej przestrzennej wynosi 18), zaś składowe symetryczne 6-fazowe (rys. 3). Uzwoje ,4.6 4 Rys. 3. Składowe symetryczne 6-fezowe


 lub 12-blegunowe (odkształcone przez 6, 1 2, 18... harmoniczna). Niezależne fazy uzwojeń można łęczyc w węzły i oczka, wykluczając w ten sposób możliwość występowania określonych składowych symetrycznych Rys.")
108 118 K. Kluszczyński nie takie, zasilane pierwsza lub pietę składowę symetryczna napięcie wytwarza przepływ zawierający harmoniczne przestrzenne 1, 5, 7, 11, 13, Pole. magnetyczne w szczelinie powietrznej jest więc polem 2-biegunowym, odkształconym wyższymi harmonicznymi przestrzennymi: 5, 7, 13, W stanie ustalonym pole kołowe wiruje przeciwnie lub zgodnie z ruchem wskazówek zegara w zależności od tego czy uzwojenie jest zasilane pierwsza, czy też pięta składowę symetryczna napięcia. Oeśll to samo uzwojenie zasilimy druga lub czwarta składowę symetryczna, w szczelinie powietrznej powstanie pole 4-biegunowe, odkształcone wyższymi, harmonicznymi 4, 8, 10, 14, 16,... Uzwojenie, zasilane składowę symetryczna trzeclę lub szóetę wytwarza pole magnetyczne pulsujęce odpowiednio 6-biegunowe (odkształcone przez 3, 9, harmoniczna) lub 12-blegunowe (odkształcone przez 6, 1 2, harmoniczna). Niezależne fazy uzwojeń można łęczyc w węzły i oczka, wykluczając w ten sposób możliwość występowania określonych składowych symetrycznych Rys. 5. Uzwojenie 4-blegunowe prądu i napięcia. Połączmy fazy uzwojenie 6-fezowego tak. Jak to przedstawiono na rys. 4. Równania węzłów przyjmu ja postać: «-14, 12» -ig, ig. Spełniają je prędy składowych symetrycznych: g*'- r(1) Uzwojenie Jest więc uzwojeniem *3 2-biegunowym, którego rozkład przepływu może być odkształcony wyższymi harmonicznymi - 3, 5, 7, 9, 10, 11, 1*3, 15,,17... Węzeł (skojarzenie faz w gwiazdę): ig + i4 + i& = O, wyklucza składowę symetryczna 8 w konsekwencji - możliwość wystąpienia harmonicznych przestrzennych: 3, 9, Dla uzwojenia 6-fazowego, połączonego tak jak na rys. 5 obowiązuję równania: ił» i4, ig = ig, i3 = ig. Spełniają je składowe symetryczne:. 4^ «pol8 magnetyczne w szczelinie powietrznej Jest więc polem 4-biegunowym, odkształconym przez harmoniczne przestrzenne - 4, 8, 10, 14, Węzeł: ig + i4 + ig b o (linia przerywane) wyklucza składowa symetryczna I g. czyli harmoniczne przestrzenne: 6, 12, Aby umożliwić porównywahla widm przepływu uzwojeń o niejednakowej liczbie par
, a więc p-tej : Porównajmy widma przepływu uzwojeń z rys. 4 i 5.")


109 Harmoniczne przestrzenne przepływu biegunów p, rzędy poszczególnych harmonicznych przestrzennych podaje się w odniesieniu do rzędu harmonicznej głównej (pracującej), a więc p-tej : Porównajmy widma przepływu uzwojeń z rys. 4 i 5. Dla uzwojenia 2-biegunowego, zasilanego składową lub * ^J * 1. 5 «7# 10, 11, 13, zaś dla uzwojenia 4-biegunowego zasilanego składową lub : I ^ J» 1, 2, 4, 5, 7, 8, 10, 11, 13, 14, 16, Widmo uzwojenia 2-biegunowego Jest znacznie rzadsze od widma uzwojenia 4-biegunowego, bowiem nie zawiera parzystych harmonicznych przestrzennych. Takie zróżnicowanie widm jest charakterystyczne dla uzwojeń, posiadających odpowiednio Jedną lub dwie strefy fazowe na parę biegunów. Uzwojenia Jednowarstwowe z jedną strefą na biegun to uzwojenia z grupami pełnymi, ześ z dwoma strefami na biegun - z grupami dzielonymi. Uzwojenia dwuwarstwowe to zazwyczaj uzwojenia z dwoma strefami fazowymi na parę biegunów. Oeden z wyjątków stanowi uzwojenie silnika 2-biegowego (uzwojenie Dahlandera) przy większej z dwóch możliwych liczb par biegunów. LITERATURA [1] Heller B., Hamate V. : Harmonie field effects in induction machines. Academia, Publishing House of the Czechoslovak Academy of Sciences, Prague [2] Kluszczyński K. : Przestrzenie aktywne i zerowe macierzy indukcyjności w maszynach asynchronicznych przy uwzględnieniu wyższych harmonicznych przestrzennych pola magnetycznego. Prace X Sympozjum nt. : Metody matematyczne w elektrotechnice, Karpacz [3 ] Kluszczyński K. : Model matematyczny wielofazowej maszyny asynchronicznej. Zeszyty Naukowe Politechniki Łódzkiej, Elektryka z. 74, Łódź [4] Wach P. : Nlesymetrle wewnętrzne maszyn indukcyjnych. Zeszyty Naukowe Elektryka z. 19, WSI, Opole [5] Zembrzuski 3., Kratochwil Z.: Uzwojenia silników indukcyjnych. WNT, Warszawa Recenzent: doc. dr lnz. Oerzy Hickiewicz Wpłynęło do redakcji dnia 2 maja 1984 r.



110 120 K. Kluazczyhskl BHGUME IIP0GIPAHC TBEHHUE rapmohhkh MArHHTOJCBHjylUEft CHJIH B ACHHXPOHHHX MAmHHAX P 8 3 B M e B U H o r c x p a a H M c j n o i e i p H i H H x o O m o t k s x a c H K x p o H H H X u a m H H u o z a o p a s a o x H T t B B K I O p b l i ia a H H X H a H p K X 8H H it T O K O B H a C O C T a B J U B j q H e, K O T O p H e O O B A a s r o n p a - A b a S h h «p * a h n p o o s p a H C S B e H H H Z ra p M O H H K M a r H H i o A B H j c y n e M c h a b i, B x - o c e B o i C X C ie M B K O O p A H H a i B T H C O C T a B J L a n q t i e C O O B B I C I B y X Z o a p o i l K O O p A H H a T HAH 8A H H H - HHHM K O O p A H H a i a U. B y O ia H O B H B H H X C a p e x H l i a Z OHH 3 B H 3a H H C CH1CM6 iphhhbzmh C T a B A H P H H M H. M a ie M a Z H H a C K a H M OABAB O O U C TK H B K - O O e B o f l C H C T 8H 8 K O O p A H H a T, H a a s a H a c x a u o g p a a x o z e H H H H M H o r o $ a 3H o 8 o O u o t k h a a a A B M e H ia p H H S x a i y q K H, H 8 n O C p «A O T B 8HHO A O A a e i B 0 3 M0XHHM O O p e A B A A T B C Q 6 K T p r a p U O H H K U a r H H T O A B H X y - q a t t c h j i h n p a p a a o B i x H H z a H H H o O u o t k h h p a a H u x c o * a h h h h h $ a a. MFF SPACE HARMONICS IN ASYNCHRONOUS MACHINES S u n a r y In polyphas* syaaetrlcal winding* of aaynchronoua aachinaa voltage and current vectors can be decoapossd Into coaponants, generating tha definite sequence of MFF space harmonica. Thesa coaponants correspond to the couple and lndywldual k-axis coordinates. In steady atate orthogonal coaponenta refer to syaaetrlcal coaponants. Matheastlcal model of winding In k-axls coordinate systea, so-called the diagram of decoapoeition of winding Into aleaentary windings allows to obtain tha spectrua of MFF harmonica In tha case of various phaea connections.



111 Z ESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ Seria: ELEKTRYKA z Nr kol. 820 Roman M IKSIEWICZ Instytut Maszyn i Urzędzeń Elektrycznych Politechnika ślęska S I LNIK 3EDN0FAZ0WY O DZIEWIĘCIU UKŁADACH POŁĄCZEŃ UZWOOEŃ ST03ANA Streszczenie. Przeprowadzono analizę i przedstawiono metodę obllczeh obwodu elektromagnetycznego indukcyjnego silnika Jednofazowego z kondensatorem pracy umożliwiajęcym uzyskiwanie dziewięciu różnych charakterystyk mechanicznych. Algorytm obliczeń z w e ryfikowano pomiarowo na silniku zaprojektowanym w oparciu o przeprowadzona metodę obliczeń, 1. Wprowadzenie Silniki indukcyjne Jednofazowe z kondensatorem pracy produkcji krajowej posiadaję uzwojenia, których osie sę przesunięte przestrzennie o kęt e l e ktryczny. Dotyczy to zarówno silników o uzwojeniach włęczonych ns stałe (silniki ogólnego zastosowania np. serii S E f ), Jak również silników o uzwojeniach przełęczalnych o dwóch lub trzech prędkościach obrotowych [3]. W pracach l], [4 ] omawia się rozwięzania, w których kęt elektryczny między osiami uzwojeń Jest różny od Daje to lepsze możliwości otrzymania różnych charakterystyk mechanicznych, zwłaszcza w silnikach o przełęczalnych uzwojeniach. Wg autora patentu [2] możliwe Jest otrzymanie dziewięciu prędkości obrotowych silnika przaz zastosowanie tylko dwóch uzwojeń dodatkowych i odpowiednie włęczanie tych uzwojeń za pomocę przełęcznika P (rys. 1). Autor patentu zaleca, aby kęt między osię fazy Rys. 1. Układ połęczeń silnika o przełęczalnych uzwojeniach stojana



112 122 R. Mikslewicz głównej i pomocniczej zawierał się w przedziale , natomiast kąt m i ędzy osię fazy głównej, a osię fazy dodatkowej wynosił Celem niniejszej pracy było określenie możliwości uzyskania takiego rozwięzania w oparciu o obwód m a g netyczny silnika produkowanego. Należało więc opracować algorytm obliczeń, zaprojektować uzwojenia oraz dokonać weryfikacji p o m i a r o w e j. 2. Obliczanie obwodu elektromagnetycznego Przy opracowywaniu algorytmu obliczeń silnika posłużono się teorię pól wirujących. Przyjęto n i e nasycony obwód magnetyczny, uwzględniono podstawową harmoniczną przestrzenną, pominięto straty w rdzeniu oraz indukcyjności w zajemne między uzwojeniami związane ze strumieniem rozproszenia. Aby uprościć analizę, z astąpiono rzeczywisty układ połączeń układem równoważnym, pozwalającym na realizację w szystkich układów połączeń uzwojeń silnika rzeczywistego. Schemat takiego układu przedstawia rys. 2. W Rys. 2. Układ połączeń uzwojeń stojana silnika równoważnego Impedancje Z ^ = R^ + Jx 8 i > gdziej i a, b, dj, d2, d^ zawierają rezystancje i reaktancje rozproszeń -faz. Zgodnie z teorią pól wirujących siły elektromotoryczne w poszczególnych uzwojeniach wytworzone przez pole wirujące zgodnie i przeciwnie pochodzące, od wszystkich faz są wyrażone w p o s t a c i : (z1e - W +z 2eJ r)^d 3 id3 + ( Z j e - ^ e Z g e * 9 ) * ^
-»rb^d l I<J1 (z1e J ^ - ^ +z2 e - J ^ - ^ ) ^ d 2 I<J2 (Z1e J (^ ^ +Z 2 e - J ^ - i > ^ d 3 id3 podobnie dla pozostałych uzwojeń, gdzie : j a z b kub.» _ zd l ku d l. V zd 2 ku d 2.")

113 Silnik Jednofazowy o d z i e w i ęciu układach Mb ł < i*fe*błb (z1e J (/ł- i )+Z 2 e - J (/?-^)-»rb^d l I<J1 (z1e J ^ - ^ +z2 e - J ^ - ^ ) ^ d 2 I<J2 (Z1e J (^ ^ +Z 2 e - J ^ - i > ^ d 3 id3 podobnie dla pozostałych uzwojeń, gdzie : j a z b kub.» _ zd l ku d l. V zd 2 ku d 2. T O dl T ^ T ' d2 T P ^ T z k ^d3 z ^- - przekładnia sprowadzająca uzwojenia danej fazy do fazy 8 u8 odniesienia, Zj, Z 2 - lmpedancje dla składowej zgodnej i przeciwnej. Korzystając z powyższych wyra2eń oraz równań prądowo-napięclowych obwodu (rys. 2), można wyprowadzić wzory na prądy fazowe: BB 1 n * U y 11 X Ł = A A - B B ~ = A B =B A ^B A Iu u 'y-* -y m = A A =BB " A B =BA gdzie : Za a - a + S2 d l + ^ 1d 3 + [ L ł ('(,r S'd d i l + i +^ 3 ) c o s t * + (^ d l + ^ 3 )2] (^ 2 ^AB " d3 + [ V * * ' > * [ v # * i r i s ) <» * ' * «) * ' V ' d l * <,d 3 > 'j W ' t ] s 2
 (<^dl * ^ d2 - n ^ e ^ \" ^ ] Z ± +")
{e\" 3ir+ i,d l +,S 2 ) + * (. - # + ^ d l e - J ^ - ^ - V d 3.J(^-t)) - t f g k + [ 2^ b ^ 2 C08(/5-^ + ( l?")
![d3,cl2)(9;, i+,,dl+nid2) + - Prądy składowych zgodnych 1 przeciwnych: I I * [ i - J* M 1d i ^ d 3 )]l* + [ * b«"j* - ^ d 2 - ' ^ 3 )ej!](/docs-images/97/134045528/images/114-2.jpg "r] i b Ja - [ l + e J T (*^dl+ ^ 3 )J xa fymifi - ( ^ a - i i s ^ ^ I b Napięcia składowych zgodnych 1 przeciwnych: I I * I I II 2 \" 2 2")
114 124 R. Mlkslewlcz B A - l a + I d l + i 1 * ^ l ^ + ^ d 3e " J1 f + ^ d 2 e J T - -<3>beJ > + (<^dl ^ d 3 ) (<^dl * ^ d2 - n ^ e ^ " ^ ] Z ± + V l ^ ^ + l^d 3 0* ^ + l^ d 2* ^ + (itdl * d 3 ) W dl ^ d2 - B B b " h ~ I d 2 + [ ^ b ^ ^ - ^ * (,?d 3 - ^ 2 ){e" 3ir+ i,d l +,S 2 ) + * (. - # + ^ d l e - J ^ - ^ - V d 3.J(^-t)) - t f g k + [ 2^ b ^ 2 C08(/5-^ + ( l? d3,cl2)(9;, i+,,dl+nid2) + - Prądy składowych zgodnych 1 przeciwnych: I I * [ i - J* M 1d i ^ d 3 )]l* + [ * b«"j* - ^ d 2 - ' ^ 3 )ej!r] i b Ja - [ l + e J T (*^dl+ ^ 3 )J xa fymifi - ( ^ a - i i s ^ ^ I b Napięcia składowych zgodnych 1 przeciwnych: I I * I I II 2 " 2 2 Znajęc w a rtości napięć składowych oblicza aię indukcję w szczelinie oraz w poazczagólnych elementach obwodu magnetycznego. M o m e n t y składowe: M i m *! * { i i } M 2 S S T xl Re { i s }
 odpowiadają następujące położenia przełącznika P, liczby zwojów (przekładnie) i impedancje rozproszeń Z^ uzwojeń dodatkowych: układ 1-1-1' i 1-1\"")


115 Silnik jednofazowy o dziewięciu układach Poszczególnym układom połączeń uzwojeń (rys. 1) odpowiadają następujące położenia przełącznika P, liczby zwojów (przekładnie) i impedancje rozproszeń Z^ uzwojeń dodatkowych: układ 1-1-1' i 1-1" 4Tdl» V cl * - 0. nrd3 = 0 Idl * Icl + c2' Id2 ' Id3 * 0 układ 2-1-1' i 2-2» ó?*dl = <Tc l. ^ d2 * ^ c 2. ^d3 = 0 Idl Icl* Id2 Ic2 ' Id3 0 układ 3-1-1' 1 3-3» + di - 0. ^ d2 - V cl * # c 2. ^ d3 = 0 Idl " - Id2 " Icl + Ic2- Id3 " 0 układ 4-2-2' i 1-1" ntdl. Vc l. ^ d2» 0, ^ 3. C2 Idl = I c l' Id2 " * Id3 = Ic2 układ 5-2-2' i 2-2" *dl = *c l. Vd2 =0. ^ = 0 Idl = Icl* Id2 " * Id3 0 układ 6-2-2' i 3-3" ^ = 0. * d2 = ^d3» 0 Idl * Id2 ' Ic2 ' Id3 3 0 układ 7-3-3' i 1-1» ^dl = 0. / d2 = 0, ^ 3 = Vcl +Jc2 Idl = * Id 2 = * Id 3 = Icl + Ic2 układ 8-3-3' i 2-2» = O. ^ d2 = 0, = ^ cl Idl = * Id2 ' Id 3 = Icl układ 9-3-3' i 3-3» ^ dl = 0, ^ d2 = 0, ^ d3 = 0 Idl " * Id2 = Id3 * *



116 126 R. Mikslewlcz = U---M--- = -n j r r + -i= = = i ,------i!!* i i!! i: r r 1 r '!' ' I H II U i n n M i <d lv n,, I h - t p H -W 1-1 L -, F ^ 1 \\ ,i - 1 i t - k - A Clii C2 1Ib X Zł ii Z2 'Y Rys. 3. Schemat uzwojenia stojana żj «16; 2 p b = 2 ; Ya 7»5 «yb * 7; Vc * 7 Na podstawie przedstawionych zależności opracowano algorytm i program -obliczeń na maszynie cyfrowej umożliwiający zaprojektowanie tego typu s ilnika. Przyjęto do obliczeń obwód magnetyczny silnika UA-121 produkowanego przez FSMM Silma. Oparcie się o gotowy obwód m a g netyczny ogranicza w z nacznym stopniu możliwości projektowe, dotyczy to zwłaszcza doboru uzwojenia (rozmieszczenia przestrzennego uzwojeń fazy głównej, pomocniczej i dodatkowych), przy określonej liczbie Żłobków stojana. Dla stojana o liczbie Żłobków stojana Z 1-16 zaprojektowano uzwojenie o liczbie biegunów 2p - 2 (rys. 3), dla którego kęty elektryczne między osiami uzwojeń w y noszę [t) 112,5, y» 67,5. Przy projektowaniu uwzględniono w sposób t radycyjny dla ęaszyn elektrycznych, nasycenie obwodu magnetycznego oraz straty mechaniczne i straty w rdzeniu. Zmiennymi niezależnymi zadania projektowego były więc dane nawojowe uzwojeń (liczby zwojów i przekroje przewodów) oraz pojemność kondensatora. P rojektowanie polegało na takim doborze danych nawojowych, aby uzyskać możliwie maksymalnie duze zróżnicowanie między charakterystykami m e c h a nicznymi silnika, co przy założonej charakterystyce obcięzenia daje rózne prędkości obrotowe. Ograniczenia dotyczyły: gęstości prędów w p oszczególnych uzwojeniach, napięcia na kondensatorze, indukcji w szczelinie sto- j an-wirnik oraz zapełnienia Żłobków stojana. Dla silników ogólnego zastosowania ograniczenia sę sprawdzane przy biegu jałowym i obcięzeniu z namionowym. W tym przypadku nelezało sprawdzać ograniczenia dla każdego z układów połęczeń oddzielnie, dla poślizgów określonych przecięciem charakterystyk mechanicznych silnika z charakterystykę obcięzenia. Dla przebiegu charakterystyk silnika istotne znaczenie ma oprócz danych nawojowych również dobór kętów między osiami uzwojeń. Dek wykazały obliczenia, największe wartości momentów krytycznych uzyskuje się przy [b ss 90, natomiast poprzez zfiianę przesunięcia uzwojeń dodatkowych (kęt ) uzyskuje się zmianę wartości momentów krytycznych, wzrost będź zmniejszenie ze


> = const Rys. 5.")
117 Silnik -jednofazowy o dziewięciu ukłaoach Kat przesunięcia fazydod.^p Rys. 4. Momenty krytyczne dla poszczególnych układów przy [)> = const Rys. 5. Charakterystyki mechaniczne silnika dla poszczególnych układów połączeń



118 128 R. Miksiewicz»»zrostem kęta «f (rys. 4). W praktyce dowolne przemieszczenie osi uzwojeń nie Jest możliwe, mogę zachodzić tylko skokowe zmiany spowodowane użłobkowaniem stojana. Zmiany te sę ograniczone również stosunkowo niewielkę liczbę żłobków w silnikach małej mocy. Dla zaprojektowanego silnika uzyskano charakterystyki mechaniczne, które przedstawia rys. 5. Przy z a ł o ż o nej charakterystyce obciężenia uzyskano dla poszczególnych układów p r ę d kości obrotowe n = 1580, 2010, 2160, 2325, 2490, 2535, 2580, 2700, 2760 obr/min. Badania laboratoryjne silnika wykonanego w oparciu o projekt w y kazały zadowalajęcę zgodność wyników obliczeń z pomiarami. Dla układu połęczeń 9 na rys. 6 przedstawiono charakterystyki obliczone i uzyskane z pomiarów. poślizg s Rys. 6. Charakterystyki silnika d l a układu połęczeń 9



119 Silnik jednofazowy o dziewięciu układach Wnioski Stwierdzono, że zastosowanie dodatkowych uzwojeń umożliwia uzyskanie dziewięciu różnych charakterystyk mechanicznych, a w konsekwencji d z i e więciu prędkości obrotowych silnika. Wprawdzie przy zmianie tych charakterystyk nie ulega zmianie poślizg krytyczny, ale dla obciężenle typu w e n t y l atorowego przedstawiony sposób zmian prędkości daje zadowalajęce rezultaty. W praktyce rzadko istnieje potrzeba nastawy dziewięciu prędkości, Elimlnujęc Jeden z przełęczników można uzyskać trzy grupy, z których każda zawiera trzy różne charakterystyki. w zależności od rodzaju wentylatora w ten sposób (poprzez zastosowanie o dpowiedniego przełęczenla) można dostosować charakterystyki silnika do różnych charakterystyk obciężenia celem uzyskania zbliżonych prędkości obrotowych. O pracowany program obliczeń może być również zastosowany do obliczeń projektowych wielu typów uzwojeń o dowolnych kętach przesunięć między uzwojeniami, w tym również do obliczeń silnika trójfazowego zasilanego z sieci Jednofazowej. LITERATURA [ 0 Guru B.S. : Cross-field analysis of asymmetric three-phase induction motors extensions to single-and two-phase machines theoreof. IEEE Transactions PAS-98, 1979, nr 4. I2j Kohn A,: Perfectionnements aux moteurs monophasés a condensateur Patent nr [3] Kluszczyński K., Miksiewicz R. : Projektowanie indukcyjnych silników Jednofazowych z kondensatorem pracy za pomocę maszyny cyfrowej. Rozprawy Elektrotechniczne 1983, 29, z. 1. [4] Veinott C.G. : Perforance calculations on L-and T-connected tappedwindlng capacitor motors. IEEE, Transactions PAS-96, 1977, nr 4. Recenzent: doc. dr lnż. Oerzy Hicklewlcz Wpłynęło do redakcji dnia 2 maja 1984 r.



120 R. Mlkslewlcz Ofl,HOOA3HhlH ABHrATEJIB 0 AEBflTH CXEMAX BKJBCMEHHfl OBMOTOK CTATOPA P e 3 b m e IIpeACiaBjieH MeioA pacietob h npon3be,n,eho ahajin3 ojiekipomarhhthoit neun 0AH0$a3H0ro HHnyKiiHOHHoro ABaraxejia o paooahm KOHAeHcaiopoM. Hepe3 cooibeioibybnee nepekjamhbahne ocmotok oiaiopa stot ABHraiejiB aejiaei bo3mo*hujc noay^ehhe a s b r t u paajih'jhux MexaHHiecKHX xapaktepacihk. A jiropam paoneiob npobepea axh ABnraiejifl, kotophh 6hji npoekihpobaa c o m a c H o c pa3pa6oiahhbai MeioAOM pacaeiob. SINGLE PHASE CAPACITOR MOTOR WITH NINE VARIOUS CONNECTIONS OF STATOR WINDINGS S u m m a r y The single phase capacitor motor, allowing to obtain nine various torque characteristics has been described. The motor, designed according to presented algorithm of calculation of electromagnetic circuit has been accomplished and tested.



121 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ Seria: ELEKTRYKA z Nr kol. 820 Aleksander FRĘCHOWICZ Instytut Elektryfikacji i Automatyzacji Górnictwa Politechnika ślęska M E TODYKA IDENTYFIKACJI PARAMETRÓW MODELU MATEMATYCZNEGO U KŁADU ELEKTROMASZYNOWEGO NA PODSTAWIE JEGO CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWEJ Streszczenie. Pomiery i obliczenia parametrów maszyn elektrycznych małej mocy obarczone sę znacznym błędem. W a r t y k u l e, na przykładzie obcowzbudnej hamownicy prędu stałego, przedstawiono m e todykę identyfikacji parametrów modelu matematycznego układu e l e ktromaszynowego, na podstawie Jego charakterystyki amplitudowo-częstotliw o ś c i o w e j. 1. Wstęp u s PT Rys. 1. Schemat ideowy hamownicy wraz z silnikiem badanym H - hamownlca; S - silnik badany; TG - t a c h o p r ę d n i c a ; PT - przekształtnik tyrystorowy wraz z układami regulacji 1 sterowania; ueu m lernik prędkości obrotowej ; I/U. - przetwornik prędu; M/U - przetwornik momentu W artykule przedstawiono metodę identyfikacji parametrów modelu matematycznego układu elektromaszynowego, na przykładzie obcowzbudnej hamownicy prędu stałego, zasilanej przez pełnosterowny wzmacniacz tyrystorowy, przeznaczonej do badań silników indukcyjnych w stanach nieustalonych. Zadaniem hamownicy Jest wytworzenie momentu hamujęcego, regulowanego w trakcie rozruchu badanego silnika indukcyjnego. Schemat ideowy hamownicy przedstawiono na rys. 1. Poprawna synteza układu regulacji hamownicy wymagała wiernego modelu matematycznego. Pomiary i obliczenia parametrów maszyn małej mocy, do k tórych można zaliczyć omawianę hamowni- cę, obarczone sę dużym błędem. M i n i malizację tego błędu osięga się w normalnej praktyce inżynierskiej, - przez uzupełnienie podstawowych równań fizycznych maszyny o inne e l ementy (np. wpływ nasycenia) i szczególnie staranny pomiar parametrów m a s z y ny. W artykule przedstawiono metodykę budowy poprawnego modelu mateme-

 > C!")
 W powyższych równaniach użyte symbole oznaczają: U * u > - napięcia sterujące wzmacniacza tyrystorowego, E I M e ' M s M t a>m wyjściowe wzmacniacza tyrystorowego i wyjściowe przetwornika")
122 132 A. Fręchowicz tycznego układu elektromaszynowego, opartego na podstawowych równaniach fizycznych maszyny prądu stałego, za pomoc? obliczeń identyfikacyjnych parametrów modelu. Obliczenia wykonano opierając się na znajomości c harakterystyki częstotliwościowej układu. 2. Model matematyczny obwodu twornika harmocnicy Model m a t e matyczny hamownicy sporządzono wychodząc z podstawowych równań fizycznych obcowzbudnej maszyny prądu stałego 2, przetworników p rądu i wzmacniacza tyrystorowego: Me(t ) > C! ł l( t ) (1) E ( t ) = C $Q)m(t) (2) E ( t ) - U(t) - R 11 ( t ) + Te L Ms (t) - Me (t) - Mt (t) - o d l ( t ) l dt J deoffl(t) dt (3) (4) U(t)» C + kpug t( t ) (5) uł(t) - kt l ( t ) (6) Mt (t)» c tcot (7 ) W powyższych równaniach użyte symbole oznaczają: U * u > - napięcia sterujące wzmacniacza tyrystorowego, E I M e ' M s M t a>m wyjściowe wzmacniacza tyrystorowego i wyjściowe przetwornika prądu, - napięcie rotacji indukowane w obwodzie twornika' h a m o w n i c y, - prąd twornika hamownicy, momenty! elektromagnetyczny hamownicy, elektromagnetyczny silnika indukcyjnego, tarcia w ł o ż y s k a c h, - prędkość kątowa wirowania zespołu, R., cł, 0, c t, kj^, kp - współczynniki stałe. U względniając ponadto, że maszyna indukcyjna pracuje na stabilnej części charakterystyki mechanicznej opisanej równaniem: (8)
 S (l + p c t'v B 2 ) = k i k p ; z 7 - ( 9 ) R Cc ft9 J + 1 ł p e + H -T b")
 k(i + pt) KM 777%rfjrr 0 «0 Na tej podstawie wyprowadzono wyrażenie określające charakterystykę")
 przeprowadzono opierając się na")
123 Metodyka identyfikacji, parametrów modelu transmitancję operatorową obwodu twornika hamownicy można zapisać w postaci : U ^ P ) S (l + p c t'v B 2 ) = k i k p ; z 7 - ( 9 ) R Cc ft9 J + 1 ł p e + H -T b T 5 + p c - V B Stosując podstawienia: 3 T = * r ^ r k i kd (c t + B2 ) k 'ł 2 p, 5 d o ) c i * R ( c t + B2 ) V R ( c t + B2> ' I 3 R T * c 2i Te (ct + B2) 2 3 T u. Otrzymuje się prostą postać transmitancji operatorowej: U l (p) k(i + pt) KM 777%rfjrr 0 «0 Na tej podstawie wyprowadzono wyrażenie określające charakterystykę amplitudowo-częstotliwościową obwodu twornika hamownicy [ l j : Lh (w). 20 lgk + 10 lg(l + c j 2!2 ) * * 40 Igo) - 10 lg (w2 -oi2 )2 + (2dw 01)2 I (11) 3. Identyflkacla parametrów modelu matematycznego obwodu twornika h a m o w nicy Obliczenia identyfikacyjne paramefrów równania (9) przeprowadzono opierając się na znajomości charakterystyki amplitudowo-częstotliwościowej obwodu twornika hamownicy [lj. Schemat układu pomiarowego przedstawiono na rys. 2.



124 134 A. Fręchowlcz Rys. 2. Schemat układu pomiarowego do w y z naczania charakterystyki ampli tudowo-częstotliwośclowej hamownicy GS - generator napięcia s inusoidalnego; ZS - z a silacz stabilizowany; Dł - dławik; Vs - w oltomierz selektywny Silnik indukcyjny załęczono bez obclężenia momentem hamujęcym. Po dojściu do prędkości podsynchronlcznej ustalono wartość prędu hamu- Jęcego, wysterowujęc w zmacniacz tyrystorowy napięciem z zasilacza ZS. Następnie, za pomocę generatora napięcia sinusoidalnego doprowadzono do oscylacji prędu hamujęcego w o kół zadanej wartości średniej. A m plitudę drgań prędu hamownicy zmierzono woltomierzem selektywnym dostrojonym do częstotliwości drgań generatora. Otrzymanę w ten sposób charakterystykę przedstawiono na rys. 3. ob S ' 6-4' 2 0 5» Im d /sl i - 6 L(u) Rys. 3. Charakterystyka amplitudowo- częstotliwościowa wirujęcej hamownicy Przyjmujęc, Ze przedstawiona-na rys. 3 charakterystyka opisana Jest zaleznościę (11), stwierdzić można, że Jest ona funkcję pulsacji (o i czterech parametrów; T, k,co. i d lub uwzględniając zależności (9), jest 2 2 funkcję pulsacji W i sześciu parametrów: R, 0, c t i S2, Te, c i, kakp. w pracy przeprowadzono identyfikację sześciu parametrów fizycznych. Na podstawie pomierzonej charakterystyki (rys. 3) utworzono wektor wa r t o ś c i rzeczywistych ^Er (w)], który obejmuje trzydzieści sześć kolejnych wartości pomierzonej funkcji Lh r (<i>) dla trzydziestu sześciu wartości pulsacji to.
t i trzydziestu sześciu wartości pulsacji O) (tych samych co w wektorze ) > obliczono z zależności (ll) trzydzieści sześć wartości funkcji L.")
![(oj) i utworzono z nich wektor wartości obliczonych [E(o,)j : [e m ] - Lh,Ri,;)i * ^C t +B2^i' T ei ' ^i* ^k ikp ^ i ] Lh [«2-R i'3 i* K ^ i - Te i '( < = V ) i.](/docs-images/97/134045528/images/125-1.jpg "(klkp ) i ] (13) L h[tó36-r i' i- Te i ' <cv > i * <kikp>i] Korzystajęc za w z orów (12) i (13), obliczono odległość euklidesowę między wektorami [Er (o>)j i Je (w )J, Jako: d 2 (Er,E) «[Er (o>) -")
![E(a>)J T [ Er (co) - E(co)J (14) O dległość (14) minimalizowano za pomocę maszyny cyfrowej posługujęc się algorytmem optymalizacyjnym Hooke'a - Oeevesa [ 4].](/docs-images/97/134045528/images/125-2.jpg "Wartość parametrów, dla których odległość (14) osięga minimum sę wartościami szukanymi parametrów modelu matematycznego.")
125 Metodyka ldentyfikac.1 i parametrów modelu. 135 Lh r (tv hr (t^) (12) hr (tdje) Ola przyjętych parametrów identyfikowanych: R^, a t. (ct - 92 )t. T (c2 ^ ),. (kt k )t i trzydziestu sześciu wartości pulsacji O) (tych samych co w wektorze ) > obliczono z zależności (ll) trzydzieści sześć wartości funkcji L. (oj) i utworzono z nich wektor wartości obliczonych [E(o,)j : [e m ] - Lh,Ri,;)i * ^C t +B2^i' T ei ' ^i* ^k ikp ^ i ] Lh [«2-R i'3 i* K ^ i - Te i '( < = V ) i. (klkp ) i ] (13) L h[tó36-r i' i- Te i ' <cv > i * <kikp>i] Korzystajęc za w z orów (12) i (13), obliczono odległość euklidesowę między wektorami [Er (o>)j i Je (w )J, Jako: d 2 (Er,E) «[Er (o>) - E(a>)J T [ Er (co) - E(co)J (14) O dległość (14) minimalizowano za pomocę maszyny cyfrowej posługujęc się algorytmem optymalizacyjnym Hooke'a - Oeevesa [ 4]. Wartość parametrów, dla których odległość (14) osięga minimum sę wartościami szukanymi parametrów modelu matematycznego. Przeprowadzajęc obliczenia identyfikacyjna stwierdzono, że obliczone parametry transmltancji obwodu twornlka zależę od doboru punktu s t artowego. Każdy, obliczony w ten sposób zestaw obliczonych parametrów, prowadzi do podobnej charakterystyki amplitudowo-częstotl i w o ś c i o w e j, a zatem do z bliżonych własności dynamicznych hamownlcy. Właściwość ta stwarza szansę doboru takich parametrów równań (i) - (6), które nie tylko umożliwię z budowanie poprawnego modelu dynamicznego układu, (symulacja cyfrowa r o z r u chu zespołu wirujęcego oraz stany przejściowe zespołu zatrzymanego i w y sterowanego, przy współpracy z różnymi typami silników indukcyjnych), ale również zapewnię odpowiednie własności statyczne hamownlcy. Spośród sześciu wymienionych parametrów trzy (stałe czasowa T, tangens kęta n achylenia części stabilnej charakterystyki mechanicznej B2 oraz stała h a m ownlcy c $ ) powinny mieć wartość zgodnę z rzeczywistę. Próby ustalenia tych trzech parametrów i przeprowadzenia obliczeń identyfikacyjnych za pomocę pozostałych trzech parametrów - nie dawały poprawnego rozwlęzania. R ównież obliczenia umożliwiajęce -drobnę korektę trzech parametrów przy zasadniczęj zmianie trzech pozostałych - dawały wynik negatywny (wydłuże
. \ c.")


126 136 A. Fręchowlcz nie czasu obliczeń, charakterystyka otrzymana przy pomocy parametrów o b l i czonych odbiegała od charakterystyki rzeczywistej). Poprawne wyniki otrzymano dopiero przy założeniu dowolnych zmian czterech parametrów: R, 0, 2 2 i k, 1 k p oraz c # i minimalnych zmian współczynników T 6 oraz (cł+b ). \ c. Rozrzut punktów charakterystyki pomierzonej i obliczonej za pomocą parametrów otrzymanych z obliczeń identyfikacyjnych był mniejszy od 0,3 db. Bako parametry punktu startowego przyjęto rzeczywiste, fizykalne parametry hamownlcy. 4. Wyniki obliczeń identyfikacyjnych i symulacyjnych hamownlcy W tabeli 1 zestawiono parametry punktu startowego obliczeń identyfikacyjnych i w a rtości obliczone tych parametrów. Obliczenia przeprowadzone zostały dla hamownlcy wielkości mechanicznej 2 B " o danych znamionowych U V, I «4 A, n_ = 3000 obr/min. n n n R Tabela 1 P a r a m e t r Punkt startowy Obliczona wartość - rezystancja obwodu twornika 4.3 a 5,5 a 0 - moment bezwładności mas O o wirujących 0, 0067 kgm 0,0062 kgm c.+bp - nachylenie charakterystyki silnika badanego 0,255 Nms 0, 2587 Nms 2 2 c i - kwadrat stałego współczynnika 0,64(Hl)2 0,43(2i)2 Ta - elektromagnetyczna stała czasowa 0,0309 s 0,0325 s kj^kp - współczynnik wzmocnienia 45 43,3 Przyjęcie w modelu matematycznym stałego współczynnika maszyny c $ > - V c V = Vo,43» 0,65 prowadziłoby do błędnej zależności momentu elekt r o m agnetycznego w funkcji prędu hamownlcy. A b y tego uniknęć równania m o delu hamownlcy (i) 1 (2) przedstawione w postaci: M e (t) - Ajlft) (la) E (t) - A ^ C t ) (2a) Przyjmujęc: A^ - 0,8 ^ (zgodnis z wartościę pomierzoną parametru) otrzy- mano : A 2 - ^ * - 54 V S -
 wielkości obliczone, b) oscylogram przebiegów Dzięki temu zabiegowi uzyskano poprawne własności dynamiczne modelu ^A 1A2 c2 2 ) a także")

127 M etodyka Identyfikac.1 i parametrów modelu Rys. 4. Moment hamujęcy i prędkość kętowa hamownicy w cyklu pracy a) wielkości obliczone, b) oscylogram przebiegów Dzięki temu zabiegowi uzyskano poprawne własności dynamiczne modelu ^A 1A2 c2 2 ) a także zgodny z rzeczywistości? stosunek momentu elektromagnetycznego do prędu: M e (t). q Nm T t r r 0<8 Wyniki obliczeń identyfikacyjnych uzyte zostały w programie symulacyjnym do obliczeń cyklu pracy hamownicy. Pełny program symulacji oprócz równań (l) - (6) obejmował równania momentu silnika badanego [3] oraz symulację cyklu hamownicy obejmujęcego narastanie momentu hamujęcego zatrzymanego zespołu i rozruch silnika obcię^opego momentem hamujęcym. Na rys. 4 p rzedstawiono wyniki obliczeń i oscylogram rzeczywistych przebiegów mo-' mantu i prędkości obrotowej hamownicy.
![138 A. Fręchowicz LITERATURA [1] Fręchowicz A. : Właściwości dynamiczna elektromaszynowej hamownicy prędu stałego o stałym momencie hamującym. Rozprawa doktorska. Politechnika śliska, Gliwice 1983.](/docs-images/97/134045528/images/128-0.jpg "[ 2] G ogolewski Z., Gabryś W.: Maszyny prędu stałego. PWT, Warszawa 1960. [3\"1 Kopyłow O. P.! Elektromechaniczne przetworniki energii. PWN, Warszawa 1978. [4] W ę g r z y n S.: Podstawy automatyki.")


128 138 A. Fręchowicz LITERATURA [1] Fręchowicz A. : Właściwości dynamiczna elektromaszynowej hamownicy prędu stałego o stałym momencie hamującym. Rozprawa doktorska. Politechnika śliska, Gliwice [ 2] G ogolewski Z., Gabryś W.: Maszyny prędu stałego. PWT, Warszawa [3"1 Kopyłow O. P.! Elektromechaniczne przetworniki energii. PWN, Warszawa [4] W ę g r z y n S.: Podstawy automatyki. PWN, Warszawa Recenzent: doc. dr inż. Oerzy Hickiewicz Wpłynęło do redakcji dnia 2. V r. METOiHKA HHEHIHiMiKAIlfDi HAPAMEIPOB MATEMAIHHECK08 MO^EJIH ajtrktpomahlhhhott CHCIEMH, HA OCHOBAHIOŁ E E HAOIOTHOfli XAPAKTEPHCTHKH P e 3 n u e H s u e p e u a m uc^hcjishiu napaueipob ajiektphxeckxx u a n a aaaos mouhocth oopexexexh zsem xiexbuoit obhokofi. B c ia i Ł * n a npmsepe sopuosa noctoaamoro Toxa esabaoiuioro BosCyameMHa, npeaciabzeaa u eio^ak a xaehih$hkanhh napaa e ip o s u&tsimukmscxom uojje&s ejtextpoxahnxxom c k cts u h, Ha ochobaaaz ee au- MHiyAHO- iacs o*xot xapaxi epacshxh < M E T HODOLOGY O P PARAMETERS IDENTIFICATION IN A M A T H E MATICAL MODEL O F T HE ELECTRICAL MACHINES SYSTEM, ON THE BASIS OF ITS FREQUENCY CHARACTERISTICS S u m m a r y In the measurements and calculations concerning the parameters of lowpower electric machines there often appear considerable errors. The paper, taking as an example dynamometer of direct current, shows the methodology of parameters identification in a mathematical model of the electrical machines system, on the basis of its amplitude- frequency characteristics.


129 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ Seria: ELEKTRYKA z Nr kol. 820 Maciej SIWCZYŃSKI Politechnika ślęska Zuzanna SIWCZYŃSKA Wyższa Szkoła Inżynierska w Opolu RÓWNANIA FUNKCYJNE W TEORII UKŁADÓW O PARAMETRACH ROZŁOŻONYCH S t r e s z c z e n i e. W pracy sformułowano teorię niejednorodnych liniowych obwodów o parametrach rozłożonych z użyciem równań funkcyjnych. Podano ogólne rozwięzania równania funkcyjnego obwodu. N a stępnie rozpatrzono obwody kawałkami różniczkowalne, kawałkami J ednorodne, kawałkami analityczne. W tych przypadkach równanie funkcyjne sprowadzono do równań całkowych obowięzujęcych na kawałkach. Podano rozwięzanie tych równań całkowych metodę p e r t u r b a c y j n ę, metodę kolejnych przybliżeń i metodę szeregów potęgowych. Zaproponowano też metodę faktoryzacji równania funkcyjnego. 1. Czwórnlki skupione (A, a) V2 < ] = u 2 Rys. i. Czwórnik skupiony l2j Na rysunku 1 pokazano czwórnik s kupiony, w którym wektor napięcie - pręd v 1 jest zwięzany z wektorem napięcie - pręd odwzorowaniem afinicznym ( A, a ) : m (a,b )v 2 - A v 2 + a (l) Odwzorowanie to składa się z macierzy łańcuchowej A i wektora źródeł a. Czwórnik nie zawierajęcy źródeł autonomicznych ma zerowy wektor źródeł i będzie nazywany b e z ź r ó d ł o w y m. Jednostkowe odwzorowanie afiniczne ma p ostać (i, ), gdzie I Jest maclerzę Jednostkowę. Złożenie odwzorowań afinicznych, odpowiadajęce kaskadzie czwórników, odbywa się według wzoru: (Aj.aj)' " (A2,a2 ) = (a 1A2, A ±a2 + a ^ (2) 2. Równania funkcyjne linii W pokazanym na rys. 2 odcinku, linii operator afiniczny więżęcy n apięcie i pręd w miejscu x z napięciem i prędem w miejscu y zależy od pary (x,y), 0 < x < y < l t
 \i(y) = ] (y) (A,a) (x,z) A x y (A,a) (x,y) ( A. a ) (y,z) ^ x y Z Rys. 2. Odcinek linii Rys. 3. Dwa przylegające odcinki v(x)» (A,a)(x.](/docs-images/97/134045528/images/130-0.jpg "y)v(y) A(x,y)v(y) + a(x,y). (3) Kaskada widoczna na rys.")
. W tym celu dokonamy tzw.")
a k, A k c), ć)a (ć) ozna* czymy brzegi odcinka A k odpowiednio: lewy, prawy i o bustronny. Rys. 4.")
130 140 M. Slwczyńskl, Z. Slwezyńska v(x)= ](*) \i(y) = ] (y) (A,a) (x,z) A x y (A,a) (x,y) ( A. a ) (y,z) ^ x y Z Rys. 2. Odcinek linii Rys. 3. Dwa przylegające odcinki v(x)» (A,a)(x.y)v(y) A(x,y)v(y) + a(x,y). (3) Kaskada widoczna na rys. 3 prowadzi bezpośrednio do równania funkcyjnego, w którym niewiadoma Jest operator afiniczny odcinka linii zawartego między przekrojami x,y: (a,a)(x,z) «(A,a)(x,y) o (A,a)(y,z), ( 4 ) gdzie x y z. S formułujemy podstawowa własność r ó w n a n i a " (4). W tym celu dokonamy tzw. regularnego podziału linii dzieląc Ję na skończony cięg rozłącznych, przylegających do siebie otwartych odcinków A k< k - i,2,... (rys. 4). Symbo- ^k-1 V 1 lami t)a k, A k c), ć)a (ć) ozna* czymy brzegi odcinka A k odpowiednio: lewy, prawy i o bustronny. Rys. 4. Regularny podział linii Przez A k (x ) ozna czać będziemy odcinek, do którego należy x. Niech x,y,z «A k i niech (A,a)k (x,y) spełnia równanie funkcyjne (4) - powiemy też, że funkcja (A,a)k (x,y) spełnia równanie (4) na odcinku Wówczas funkcja (A,a)(x.y) i (A.a)k ( x ) (x, A ^ x ) ) (a,a) [k(x)łl] ( 3 A [ k(x] +1j )... o ( A,a ) [k(y)-i]{^ [ k (y ) - i ] ) (A.a)k ( y ) ( i ó k ( y ).y) (5) jest rozwiązaniem równania (4). Założenie operatorów afinlcznych dane wzorem (2) rozbija równanie (4) na dwa równania funkcyjna A(x,z)» a (x,y) A(y,z) (6a) a(x,z)» a (x,y) a(y,z) + a(x,y). (6b) I

Hk (y) (7a) 8 'k, y ( x. y ) - A k (x,y)hk (y) (7b) gdzie (8a,b) sę tzw. tworzącymi macierzy A k (x,y) i źródła ak (x,y), będziemy też mówili: tworzącymi na odcinku A k.")
, a k (x,y) możns wyznaczyć przez rozwiązanie równań różniczkowych (7) przy warunkach początkowych A k (x,x) - I, a k (x,x)» (9a,b) Rozwiązanie równanie funkcyjnego (4) dla funkcji")
131 Równania funkcyjne w teorii układów. 141 Widać, że równanie (6a) Jest niezależne od (6b). Dlatego równanie (6a) odgrywać będzie dalej rolę zasadniczę. Ze w zględów praktycznych dużę rolę odgrywaję linie kawałkami różnlczk o w a l n e, tj. takie dla których istnieję regularne podziały na odcinki 4 k# na których funkcje (A,a)k (x,y) sę różniczkowalne, Różniczkujęc wówczas równania (6) na odcinku 4 k podług z w punkcie z = y otrzymamy: A k,y^*'y ^ = A k (x,y )Hk (y) (7a) 8 'k, y ( x. y ) - A k (x,y)hk (y) (7b) gdzie (8a,b) sę tzw. tworzącymi macierzy A k (x,y) i źródła ak (x,y), będziemy też mówili: tworzącymi na odcinku A k. Tworzące reprezentują rozkłady parametrów i źródeł autonomicznych wzdłuż linii, dlatego uważamy je za znane w procesie analizy obwodu. Funkcje A k (x,y), a k (x,y) możns wyznaczyć przez rozwiązanie równań różniczkowych (7) przy warunkach początkowych A k (x,x) - I, a k (x,x)» (9a,b) Rozwiązanie równanie funkcyjnego (4) dla funkcji kawałkami różniczkowal- nych ma postać: (a,a)(x,y) o ( A -a ) k ( y ) ( 8 4 k(y)'y) ( 1 0 ) Powróćmy do równań (7a,b) dla odcinka 4 k. Jeżeli znajdziemy rozwiązanie równania (7a), to rozwiązanie równania (7b) można określić wzorem V x \ ( 11) Odcinek 4 k nazwiemy wz a j e m n ym. Jeżeli nie zawiera on rozłożonych źródeł sterowanych, tj. gdy macierz ma strukturę
. Z tożsamości Oakobiego dla równania (7a) wynika, że dla odcinka wzajemnego JF t r h A k (x.")
![y ) = ex (P ] d3 (13) 3.](/docs-images/97/134045528/images/132-1.jpg "Linie z nieznaczna niejednorodnością Rozważmy odcinek linii, na którym istnieje tworząca H + E F ( x ), gdzie H Jest stałę macierzowę, a małym parametrem.")
![Równanie różniczkowe (7a) na tym odcinku przyjmuje postać: A'y (x,y) = A(x,y) [h + F(y)].](/docs-images/97/134045528/images/132-2.jpg "(14) Równanie to doprowadzimy do równania całkowego Volterry: A(x,y) = e (y_x)h + j ła(x,x+^) F ( x+^) e (y-x_s )Hd (15) 0 Stosujęc metodę perturbacyjną poszukujemy")
132 142 M. Siwczyóski, Z. Siwczyńska M y ) = (y) ( 12) gdzie Z k i Y k to impedancja podłużna i admitancja poprzeczna odcinka na jednostkę długości. Źródła sterowane rozłożone zapełniają miejsca zerowe w m a cierzy (12). Z tożsamości Oakobiego dla równania (7a) wynika, że dla odcinka wzajemnego JF t r h A k (x.y ) = ex (P ] d3 (13) 3. Linie z nieznaczna niejednorodnością Rozważmy odcinek linii, na którym istnieje tworząca H + E F ( x ), gdzie H Jest stałę macierzowę, a małym parametrem. Równanie różniczkowe (7a) na tym odcinku przyjmuje postać: A'y (x,y) = A(x,y) [h + F(y)]. (14) Równanie to doprowadzimy do równania całkowego Volterry: A(x,y) = e (y_x)h + j ła(x,x+^) F ( x+^) e (y-x_s )Hd (15) 0 Stosujęc metodę perturbacyjną poszukujemy rozwiązania równania (15) w postaci szeregu potęgowego parametru: A(x,y) = [i + A 1 (x,y) + 2A 2 (x,y) ---] e (y_ x )H (1 6 ) Podstawiając funkcję (16) do równania (15) łatwo otrzymuje się formuły rekurencyjne dla macierzy A (x,y): y-x A n * l ( x 'y) * / A n ( x 'x+p ^ F(x+S )e" ^ Hd^' (l7) 0 A 0 (x -y) =
 będziemy poszukiwać w postaci szeregów A n (x,y) = (y-x)n ^ (y-x)m An m (x) (18) m =0 W tym celu rozwinięto w")
![szereg potęgowy funkcję F ( x * p = FQ (x) + ^ F 1 (x) + J 2 F2 (x) + ---- (19) Fn (x> ń T [F ( n ) <x+^ ] 5 = 0 Korzystając ze wzoru 9akera -](/docs-images/97/134045528/images/133-1.jpg "Campbella - Hausdorffa [2] ea Be\"A = B + QA,B ] + [A,[A,B]] + y y [ A,[A.[ A,3]] ] +.")
![.. gdzie [a,b ] = a b - b a Jest komutatorem macierzy, mamy kolejne rozwinięcia: e!h F0 (x)e"3h = Fq (x ) + 5 [ h,f0 (x )] + * ^ 2 [H.](/docs-images/97/134045528/images/133-2.jpg "[H,FQ (x )] ] + 3 r 3 3 th -CH,QH,F0 (x)]] ] +... + ^ 2 [H.F1 (x )] + 5 - ^ 3 [h,[h,f1 (x )] ] + 3t 5 4 [h.[h.ch.f1(x)]]] +.")
133 Równania funkcyjne w teorii układów... i43 Poszczególnych funkcji A n (x,y) będziemy poszukiwać w postaci szeregów A n (x,y) = (y-x)n ^ (y-x)m An m (x) (18) m =0 W tym celu rozwinięto w szereg potęgowy funkcję F ( x * p = FQ (x) + ^ F 1 (x) + J 2 F2 (x) (19) Fn (x> ń T [F ( n ) <x+^ ] 5 = 0 Korzystając ze wzoru 9akera - Campbella - Hausdorffa [2] ea Be"A = B + QA,B ] + [A,[A,B]] + y y [ A,[A.[ A,3]] ] +... gdzie [a,b ] = a b - b a Jest komutatorem macierzy, mamy kolejne rozwinięcia: e!h F0 (x)e"3h = Fq (x ) + 5 [ h,f0 (x )] + * ^ 2 [H.[H,FQ (x )] ] + 3 r 3 3 th -CH,QH,F0 (x)]] ] ^ 2 [H.F1 (x )] ^ 3 [h,[h,f1 (x )] ] + 3t 5 4 [h.[h.ch.f1(x)]]] +... e'sh5 2 F2 (x)e'5h = 5 2 F2 (x) J 3 CH,F2 (x > ] j J 4 [h,[h,f2 (x)]] * 3T ^ 5 th.[h,[h,f2 ( x ) ] ] ] ł... Po zsumowaniu powyższych wzorów otrzymujemy rozwinięcie eth F(x+5)e"3H» Q 0 (x) (x) + 5 2Q 2 (x) +... (20)
![144 M. Slwczyńskl. Z. Siwczyńska gdzie O o (x) = Fo (x) (x)» [ h.fq (x )] + Fx (x) ( 21) Q 2 (x ) - [ H.](/docs-images/97/134045528/images/134-0.jpg "t H, F 0 (x)]] 4 [H,F1 (x): + F2 (x ) Qj ( x ) - 5j [ h, [ h, [ h.")
![f 0 ( x )JJ] 4 5 [ h, [ h, f 1 ( x )]] 4 [ h, f 2 ( x )] 4 f3 ( x ) Zanim skorzystamy ze wzoru (17), trzeba wymnoiyć szeregi (18) i ( 2 0 ) i An (x,x 4 $](/docs-images/97/134045528/images/134-1.jpg ") e * HF (x4 ]p e 3 H > 1 n 5 \" A n.")
![(x>[qo(x) + W X > + m*0 S nan o (x)qo (x) + S n + 1 [A n l (x)qo (x) + A n o (x)ql (x)] + + S n + 2 [A n 2 (x)qo (x) + A n l (x)qi*x) + A n o (x)q2 (x)j +](/docs-images/97/134045528/images/134-2.jpg "*'* Wzór (17) daje A n+ i(x.")
134 144 M. Slwczyńskl. Z. Siwczyńska gdzie O o (x) = Fo (x) (x)» [ h.fq (x )] + Fx (x) ( 21) Q 2 (x ) - [ H. t H, F 0 (x)]] 4 [H,F1 (x): + F2 (x ) Qj ( x ) - 5j [ h, [ h, [ h. f 0 ( x )JJ] 4 5 [ h, [ h, f 1 ( x )]] 4 [ h, f 2 ( x )] 4 f3 ( x ) Zanim skorzystamy ze wzoru (17), trzeba wymnoiyć szeregi (18) i ( 2 0 ) i An (x,x 4 $ ) e * HF (x4 ]p e 3 H > 1 n 5 " A n. (x>[qo(x) + W X > + m*0 S nan o (x)qo (x) + S n + 1 [A n l (x)qo (x) + A n o (x)ql (x)] + + S n + 2 [A n 2 (x)qo (x) + A n l (x)qi*x) + A n o (x)q2 (x)j + *'* Wzór (17) daje A n+ i(x.y) (y-x ) n4l T r T T A n o (x) Q o (x) + + (Y - x)i T T - 5 [ A n l (x) Q o (x) + A n o (x) Q l (x)] + + (Y - x)2 i r r - s [ A n 2 (x) Q o (x) + A n l (x) Q l (x) + + A n o (x) Q 2 (x)3 + Stęd łatwo określić wzór rekurencyjny dla m acierzy - współczynników szeregu (18) : A n 4 l, m (x) = Ł T T i E A n. m - p (x> Q p (x> p*0 (22) przy czym A q o (x ) I, A o m (x ) =» dla m > 0.

 ma w tym przypadku postać: Ay(x,y) - a (x,y )[h + F(y)] (23) Równanie (23'' łatwo doprowadzić do równania całkowego Volterry: A(x,y) - a (y ~ *)H + J a ( x, x+ $) F ( x+ ) e^y' x\" ^")
 = $ n Jest zwężeniem, w ó w czas równanie X - 3 ( x ) ma w i* Jednoznaczne")
135 Równania funkcyjne w teorii układów Linie kawałkami analityczne Linię kawałkami analityczna nazywamy linię, dla której istnieje podział regularny taki, że na poszczególnych odcinkach tego podziału istnieje tworzęca rozwijalna w odpowiednio zbieżne szeregi potęg przyrostów argumentu x. W e ź m y pod uwagę odcinek A linii, na którym istnieje tworzęca H + F ( x ), gdzie H Jest macierzę niezależna od x. Równanie (7a) ma w tym przypadku postać: Ay(x,y) - a (x,y )[h + F(y)] (23) Równanie (23'' łatwo doprowadzić do równania całkowego Volterry: A(x,y) - a (y ~ *)H + J a ( x, x+ $) F ( x+ ) e^y' x" ^ )Hd^ (24) O R o zważmy równanie (24) z punktu widzenia zasady odwzorowań zwężających. Niech <8 będzie takim ciągłym operatorem przekształcającym przestrzeń m e tryczna R w siebie, że pewna Jego potęga 3) = $ n Jest zwężeniem, w ó w czas równanie X - 3 ( x ) ma w i* Jednoznaczne rozwiązanie. Iatotnie, niech X będzie punktem stałym operatora S), tj. 3) (x) n X. Wtedy s (x) «<8[ )k (x)] -2)k [ S (x)] = 2)k (xo ) x, ( k - ~ ) ponieważ operator 3) jest zwężeniem i dlatego cięg 5)(x0 ), 2)2 (x0 ), i)3 (xo ),... dla dowolnego X Q «R dąiy do punktu stałego X operatora 3). Zatem 3(x) = x. Ten punkt stały Jest Jedyny, gdyż dowolny punkt stały względem j Jest stały również względem operatora zwężającego 3 > dla którego punkt stały może być tylko Jeden. Niech [3(A)] (x,y) - e (y-x)h + Vj a ( x. x+$t F ( x+ ) e (y-x"? )Hd^ (251 O Oest to więc operator równania (24). Zbadamy i8tnienie i jednoznaczność rozwięzania równania (24) w przedziale: x,y t A.

![Wykażemy, że pewna potęga operatora (25 ^ Jest zwężeniem: U [ S Í A j ^ l í x. y ) - [ 3 (a 2 )] (x,y) - y-x J [Ajíx.x+J) - A^x.](/docs-images/97/134045528/images/136-1.jpg "x-t-^)] F(x+^)e^y _ x P ' 7 0 Hd <u(y-x) max IA,(x,y) - A_(x,y) u(y-x) p(a,,a_), 4 x,yc \" gdzie p.")
 - [ ^ ( A g ) ] ( x, y ) ^ p 2 p ( A lta 2 ) [3 (Ai)]('l*y) - [ 3 n (A2 >] t n f,łn ^ n](/docs-images/97/134045528/images/136-2.jpg "p ( A lta 2 > Z a t e m : gdżle IA I oznacza długość odcinka A. Wynika stęd, że zawsze można wybrać na tyle duże n, aby ( /X A )n _.")
136 146 M. Slwczyóski, Z. Slwczyńska Metrykę wprowadzimy następujęco: p(a,,a,) - max ÜAjfxiy) - A (x,y) x. y «A gdzie li II Jest zwykłę normę macierzy A [ 8 ij]' 11,N IX "a* X > t 1. Wykażemy, że pewna potęga operatora (25 ^ Jest zwężeniem: U [ S Í A j ^ l í x. y ) - [ 3 (a 2 )] (x,y) - y-x J [Ajíx.x+J) - A^x.x-t-^)] F(x+^)e^y _ x P ' 7 0 Hd <u(y-x) max IA,(x,y) - A_(x,y) u(y-x) p(a,,a_), 4 x,yc " gdzie p. max F(x)e(V-x)HIL x,y «4 Stęd 2 (A1 )](x,y) - [ ^ ( A g ) ] ( x, y ) ^ p 2 p ( A lta 2 ) [3 (Ai)]('l*y) - [ 3 n (A2 >] t n f,łn ^ n p ( A lta 2 > Z a t e m : gdżle IA I oznacza długość odcinka A. Wynika stęd, że zawsze można wybrać na tyle duże n, aby ( /X A )n _. n f - * 1 - Czyli 3n Jest zwężeniem i równanie (24) posiada Jednoznaczne rozwlęzanle, które Jest granicę cięgu danego wzorom:
 e (V-x- P Hd^ (26) O W celu dalszej analizy równania (24) wprowadzimy pojęcie szeregu absolutnie <1 - zbieżnego.")
 x < cl szereg liczbowy ] M n An <2 8 > n=0 jest zbieżny.")
, sin(xa) sę przykładami szeregów absolutnie zbieżnych. Oczywiście wielomian A_ +")
137 Równania funkcyjne w teorii układów 147 A n + i (x,y) - e (V-x)H + Vj A n (x.x+ p F(x+$) e (V-x- P Hd^ (26) O W celu dalszej analizy równania (24) wprowadzimy pojęcie szeregu absolutnie <1 - zbieżnego. Szereg O O i : * v n =0 _ gdzie A n sę stałymi macierzami, nazywamy absolutnie <J - zbieżnym. J e żeli istnieje taka liczba 6 > 0, że dla każdego (27) x < cl szereg liczbowy ] M n An <2 8 > n=0 jest zbieżny. Szczególnym przypadkiem jest szereg absolutnie zbieżny, dla którego przy wszystkich x szereg (28) Jest zbieżny. Łatwo przekonać się, że szeregi e x A, c o s ( x A ), sin(xa) sę przykładami szeregów absolutnie zbieżnych. Oczywiście wielomian A_ + XA X A, o i n Jest szeregiem absolutnie zbieżnym. Niech szeregi n=0 n=0 będę absolutnie ó - zbieżne. Zbadajmy iloczyn sum częściowych: N N N N 2N E E i : E E - V n»0 m«0 n=0 m*0 n«0 gdzie n C * S A B. n /.i n-p p p=0

.")
 s i i całkując otrzymamy A 1 (x,y) w postaci absolutnie <5 - z b i e ż n e g o szeregu potęg (y-x).")
138 148 M. Slwczyńskl. Z. Slwczyńska Zachodzi nierówność 2N 2N n 2N n E l x n Cn - E x n l E A n -pb p H X > n X > n - nno n«0 p=0 n=0 p=0 pb pl 2N n N N E lx ne iian-pinibpii = E E x,n+>niinb«j n«0 p«0 n=0 m*o - E ix niani i E x "iib 11, n*0 m =0 z której wynika, że iloczyn absolutnie <J - zbieżnych szeregów również Jest absolutnie <5 - zbieżny. Z ałóżmy teraz, że macierz F ( x + P rozkłada się w absolutnie 6 - zbieżny szereg (19). Szereg ten pomnożony przez absolutnie zbieżny szereg funkc ji e^y-x" S ^ H daje w wyniku szereg absolutnie ó - zbieżny. Przyjmujęc A o (x,x+j) s i i całkując otrzymamy A 1 (x,y) w postaci absolutnie <5 - z b i e ż n e g o szeregu potęg (y-x). Z drugiej strony łatwo zauważyć, że o perator (25) przekształca absolutnie 6 - z b i e ż n y szereg potęg (y-x) w absolutnie <T - zbieżny szereg tych potęg. Na zasadzie indukcji wynika więc ze wzoru (26), że równanie (24) ma Jednoznaczne absolutnie - zbieżne rozwiązanie. Przyjmując A0 (x.y) - e (y-x >H i stosując iteracje (26) otrzymamy A^(x,y) - e (y x)h J* e5h F(x*$).(y-x-$>H«ę - 0 -[i + (y-zjpjjiz) + (y-x)2 P12(x) +...] e^y_x^h - - P ^. y ).(y-^h, gdzie P j ^. y ) Jeet absolutnie d - zbieżnym szeregiem potęg (y-x). Podstawiając do wzoru.(26) An (x.y) - Pn (x,y) e (y-x)h,
 = I. Zatem Jedynym rozwięzaniem równania (24) Jest funkcja A(x,y) = [p0 (x ) (y-x)p1 (x) + (y-x)2 P2 (x) +.")
![..] e^y _ x ) H, (29) PQ ( x ) = I, gdzie szereg w nawiasie kwadratowym Jest absolutnie ó - zbieżny. Równanie (24) przepiszemy w formie y-x A ( x, y ) e^x- y ^H I + J a(x,x+ ) F(x+^) e ^ HdJ.](/docs-images/97/134045528/images/139-1.jpg "(30) O Będziemy wyznaczać niewiadome macierze wstawiajęc funkcję (29) do równania (30): P 1 (x), P2 (x),... bezpośrednio, (y-x) P 1 (x) + (y-x)2 P2 (x) +.")
 O Rozwijamy w szereg potęgowy funkcję th F(x*$)e\"iH = 0 Q (x) * ' $ Q 1 U ) + ^ 2Q 2 (X ) + przy czym macierze Q q (x ), Qj(x), Q 2 (x),... wyznaczamy za pomocę wzorów (19) 1 (21).")
139 Równania funkcylne w teorii układów. 149 gdzie Pn (x,y) Jest absolutnie - zbieżnym szeregiem potęg (y-x) i Pn ( x, x ) = I, otrzymamy A n + i { x -y) - pn + i ( x -y> * (y" x ) H. gdzie pn + i(x 'V0 też Jest absolutnie cj - zbieżny i Pn + 1 ( x, x ) = I. Zatem Jedynym rozwięzaniem równania (24) Jest funkcja A(x,y) = [p0 (x ) (y-x)p1 (x) + (y-x)2 P2 (x) +...] e^y _ x ) H, (29) PQ ( x ) = I, gdzie szereg w nawiasie kwadratowym Jest absolutnie ó - zbieżny. Równanie (24) przepiszemy w formie y-x A ( x, y ) e^x- y ^H I + J a(x,x+ ) F(x+^) e ^ HdJ. (30) O Będziemy wyznaczać niewiadome macierze wstawiajęc funkcję (29) do równania (30): P 1 (x), P2 (x),... bezpośrednio, (y-x) P 1 (x) + (y-x)2 P2 (x) y-x = / [ p0 (x) + ^ p l (x) + ^ 2p2 ^ x) + F(x+J)e'lHd^. (31) O Rozwijamy w szereg potęgowy funkcję th F(x*$)e"iH = 0 Q (x) * ' $ Q 1 U ) + ^ 2Q 2 (X ) + przy czym macierze Q q (x ), Qj(x), Q 2 (x),... wyznaczamy za pomocę wzorów (19) 1 (21). Wymnoźenie szeregów daje: [ p0 ( x ) + ^ P i ( x ) + ^ 2 P2 ( x ) +... ] [ Q 0 (x ) + $ Q 1 ( x ) + ^ 2Q2 ( x ) +... ] - = P0 ( x)qq ( x ) + J [ p 1 ( x )U0 ( x) + Pq ( x)q 1 ( x ) ] + ^ 2 [ p2 (x )Q0 (x ) + p 1 (x)q1 (x) + P q (x )Q2 (x )] + (32)
p0 (x)q0 (x) + (y-x)2 [ p 1 ( x)q0 ( x ) + Po (x)01 (x)] + + (y-x)3 3-[p 2 (x ) Q 0 ^x) * p i(x ^ l ^ x ^ + p 0 (x )Q2 (x )] + > a stęd w ynikają w z o r y rekurencyjne : P a (x) = P 3")
![(x)qp (x) P2 (x) = p 1 (x )Qq (x ) + P0 (x)q1 (x)j P 3 (x) = ^ [ P 2 (x)0o (x) * P1 (x)q1 (x) + Pq ( x )Q2 ( x) ] ^ n - 1 P (x ) = i Pn.](/docs-images/97/134045528/images/140-2.jpg "( x ) q ( x) n m x n-l-m m m =0 Oeżeli funkcja p ( x t p w równaniu (24) rozwija się w absolutnie <J - zbieżny szereg potęg ^, to równanie to ma jedyne rozwiązanie (29), gdzie s zereg w nawiasie")
140 150 M. Siwczyński, Z. Siwczyńska Wstawiajęc szereg (32) do równania (31) i całkując otrzymamy ( y - x ) P1 (x) + (y-x)2 P2 (x) + (y-x)3 P3 (x) +... = (y-x)p0 (x)q0 (x) + (y-x)2 [ p 1 ( x)q0 ( x ) + Po (x)01 (x)] + + (y-x)3 3-[p 2 (x ) Q 0 ^x) * p i(x ^ l ^ x ^ + p 0 (x )Q2 (x )] + > a stęd w ynikają w z o r y rekurencyjne : P a (x) = P 3 (x)qp (x) P2 (x) = p 1 (x )Qq (x ) + P0 (x)q1 (x)j P 3 (x) = ^ [ P 2 (x)0o (x) * P1 (x)q1 (x) + Pq ( x )Q2 ( x) ] ^ n - 1 P (x ) = i Pn. ( x ) q ( x) n m x n-l-m m m =0 Oeżeli funkcja p ( x t p w równaniu (24) rozwija się w absolutnie <J - zbieżny szereg potęg ^, to równanie to ma jedyne rozwiązanie (29), gdzie s zereg w nawiasie kwadratowym jest absolutnie zbieżny. Wniosek ten ma z naczenie wówczas, gdy F ( x + p Jest wielomianem. 5. Faktoryzacja rozwiązenia [ć] W tym rozdziale o t r z ymamy macierz A(x,y) w postaci iloczynu w i e l o m i anów i funkcji wykładniczych. Zapiszmy równanie (7a) w postaci A = AH, (3 4 ) O gdzie H Q (y) * H(y) jest tworzącą odcinka linii, symbol A* oznacza Ay(x,y). Podstawmy w równaniu (34): A(x #y) * A d l (x,y)aq ( x, y ).
 z tworzącą H 1 (x,y) zadaną wzorem (37).")
 o takiej samej strukturze co")

141 Równania funkcyjne w teorii układów. 151 co zapiszemy krótko (35) Otrzymamy równanie (36) odzie (37) Macierz A., nazwiemy macierz? linii resztkowej. Linia resztkowa spełnia di równanie (36) z tworzącą H 1 (x,y) zadaną wzorem (37). Macierz linii resztkowej powinna być możliwie bliska macierzy j e d n o stkowej, co ma miejsce gdy tworząca H 1 (x,y) Jest równa macierzy zerowej, czyli gdy spełnione Jest równanie: Ponieważ macierz resztkowa A dl spełnia równanie (36) o takiej samej strukturze co równanie (34), można więc z macierz? A rfl postąpić tak samo jak z macierz? A. Kontynuując ten proces dalej uzyskuje się ciąg równań : H2 = (A1H 1 - A 1 )A1_1 H3 = (A2H2 - A 2 )A2_1 A, s A. -A dn d,n+l n Proces ten jest prowadzony w kierunku uzyskania najmniejszej co do normy macierzy tworzęcej Hn# Stęd otrzymujemy
, a następnie obliczamy H j ^. y ) przyjmujęc H Q (y) = H(y). Potem wyznaczamy A 1 (x,y), a stęd H2 (x,y).")
 może być sprowadzony do następującej")
 = I + (y-x)pn l (x) + (y-x)2 Pn 2 (x) +.")
142 152 M. Siwczyński. Z. Siwczyńska W powyższym ciągu równań najważniejsze są te, które ujęto w ramki. W praktyce proces zaczynamy od wyboru funkcji A Q (x,y), a następnie obliczamy H j ^. y ) przyjmujęc H Q (y) = H(y). Potem wyznaczamy A 1 (x,y), a stęd H2 (x,y). Postępując tak dalej w kierunku wyznaczonym przez strzałki d o c h o d z i m y do pewnej tworzącej H n + i^x >y^' która powinna być mała co do normy. Każde z równań ujętych w ramki można zastąpić równaniem c a ł k o w ym Volterry, dlatego proces rozwiązywania równania (34) może być sprowadzony do następującej procedury: Wybieramy, funkcję A Q (x,y), w y z n a c z a m y rekurencyjnie (39) y-x O (4 0 ) z a p i s u j e m y rozwięzanie w formie iloczynu (41) to funkcji A n (x,y) będziemy poszukiwać w formie szeregu: A n (x,y) = I + (y-x)pn l (x) + (y-x)2 Pn 2 (x) +... a macierze pn i^x ) wyznaczymy ze wzorów (33) : We wzorze (39) zachodzi konieczność odwrócenia macierzy to zrobić wykorzystując wzór A n (x,y). Można (I I + X ) -" 1 = I - X + X 2 -X3 +...
 w postaci szeregu potęg (y-x). Uwzględniając obcięty szereg I - X +... + (-1)N XN popełniamy błąd, który można określić z równości (i + X) I - X +.")
 w s z e r e g uzyskujemy ze wzorów (21). Jeżeli natomiast H n (x,y) - Q n o (x) (y-x)qn l (x) +... + (y-x)n Q n g( x ), A n (x,y) = I + (y-x)pn l (x).")
143 Równania funkcyjne w teorii układów słuszny przy II XII < 1. W tym przypadku za X przyjmujemy część szeregu funkcji A n (x,y), tj.! (y-x)pn l (x) +... Dzięki temu otrzymamy macierz A ~ 1 (x,y) w postaci szeregu potęg (y-x). Uwzględniając obcięty szereg I - X (-1)N XN popełniamy błąd, który można określić z równości (i + X) I - X (-1)N X N - 1 (-1)N X N+1 Oeżeli przyjąć (y-x)e.(x) A n. x (x.y) e, (42) to (y-x)en_ 1 (x)r, (x-y)en_ x (x) Hn (x,y) = e [Hn- l^x, y ) E n-l^x J 6 pokrywa się z wynikiem otrzymanym w rozdziale 6. Macierze współczynniki rozkładu funkcji Hn (x,y) w s z e r e g uzyskujemy ze wzorów (21). Jeżeli natomiast H n (x,y) - Q n o (x) (y-x)qn l (x) (y-x)n Q n g( x ), A n (x,y) = I + (y-x)pn l (x)... + (y-x)m Pn M (x), (43) to Hn+ l ( x 'y) * L Pn l (x) + (y - x )2Pn 2 (x) + + (y- x)" +M(N+Młl)Pn,N+M + l (x) " - Pn l (x) - (y-x)2pn 2 (x) (y-x)m 1M P n M (x)]a 1 ( x >y) - - [ ( y - x ) M (M+ l)pn M + 1 (x)... + (y-x)n + M (N+M+ l)pn > N + M + 1 (x)]a;1 (x,y) Stosując na przemian funkcje (42) i (43) otrzymamy funkcję A(x,y) w postaci naprzemiennego iloczynu wielomianów potęg (y-x) i macierzy wykładniczych argumentu (y-x).
![M. S l w c z y ń s k l. Z. Slwczyrtska LITERATURA l] Bellman R. : Introduction to Matrix Analysis. McGraw-Hill 1960. [2 ] Brockett R. : Lie algebras and Lie groups in control theory. Proc.](/docs-images/97/134045528/images/144-0.jpg "of the NATO Advanced study institute held at London, August 27 - S e p t e m ber 7, 1973, Dordrecht - Boston, D, Reidel Publishing Company, 1973, pp, 43-82. (\"3 ] K ołmogorow A.N., Fomin S.W.")
![: Elementy teorii funkcij i funkcjonalnowo analiza. Nauka, Moskwa 1976. 4 ] Lankaster P.: Theory of Matrices, Academic Press.1969, TsT Redheffer R. M. ; Novel uses of functional equations, 0.](/docs-images/97/134045528/images/144-1.jpg "Rational Mech. L Anal. 3 1954, pp. 271-279. [e] Siwczyhska 2. : Iteracyjne metody rozwiązywania liniowych n i e jednorodnych obwodów o parametrach rozłożonych. Praca doktorska.")

144 M. S l w c z y ń s k l. Z. Slwczyrtska LITERATURA l] Bellman R. : Introduction to Matrix Analysis. McGraw-Hill [2 ] Brockett R. : Lie algebras and Lie groups in control theory. Proc. of the NATO Advanced study institute held at London, August 27 - S e p t e m ber 7, 1973, Dordrecht - Boston, D, Reidel Publishing Company, 1973, pp, ("3 ] K ołmogorow A.N., Fomin S.W. : Elementy teorii funkcij i funkcjonalnowo analiza. Nauka, Moskwa ] Lankaster P.: Theory of Matrices, Academic Press.1969, TsT Redheffer R. M. ; Novel uses of functional equations, 0. Rational Mech. L Anal , pp [e] Siwczyhska 2. : Iteracyjne metody rozwiązywania liniowych n i e jednorodnych obwodów o parametrach rozłożonych. Praca doktorska. Politechnika śląska, Gliwice $yhkuhohajibhhe ypabhehuh B IE0PHM UEHEki C PACIffi&EJliSHHHMH 1IAPAMETPAMH P e 3 10 m e B p a d o ie p a 3 p a 6 o ia H a TeopHH HeonHopoAHnx jihheshhx u en eft c p acnpea ejigh - humh n a p a u e x p a u E c npaueh ek H eu cfyhkuhohajibhux ypabuehhti. HaftAeHO o 6 q e e pemehhe yhkuh ohajibho ro ypabhehhh n ew. H ajiee paccm oipeh H K ycoh H o-peryjw ph tie uenh, Kyoosao-OAHopoAHiie h KycoHHo-ajtajiHTiraecKHe u e m. B sthx cjtjm a sx <SyH- KUHOHajibHue ypabaehhh CBexeHu k KycoHHo-HHTerpapeeuuM ypabhehxhii. HaitneHo pemehhe s t h x HHTerpajibHtoc ypabhekhit mstoaom w ajioro n a p a u e T p a, HHTepauHOHhhm MeiOAOM h MeioAOB otenehhbix phaob. IIpeAJioxeH la x z e u eto A 4>aKTopH3aiiHH penehhh $yhkhhohajii>horo ypabhshhh. FUNCTIONAL EQUATIONS IN THE THEORY OF THE SYSTEMS WITH DISTRIBUTED PARAMETERS S u m m a r y The theory of nonhomogenous systems with distributed parameters by the means of functional equations was formulated. The general solution of circuit functional equations was given. Piecewise differentiable, piecewise homogenous, and piecewise analytic circuits were examined. The functional equations of this cases are reduced to integral equations suitable for the pieces. The solution of the integral equations with the use of periupbation method, step by step method and power series method is given. The factorization of functional equation solution is proposed.
proponowanego filtru na zmiany parametrów.
 ZESZYTY NAUKOWE POLITECHNIKI Ś L ISKIEJ Seria: ELEKTRYKA z. 95 1985 Nr kol. 820 Marian PASKO Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika śląska WĄSKOPASMOWY FILTR RC-GIC
ZESZYTY NAUKOWE POLITECHNIKI Ś L ISKIEJ Seria: ELEKTRYKA z. 95 1985 Nr kol. 820 Marian PASKO Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika śląska WĄSKOPASMOWY FILTR RC-GIC
Tranzystorowe wzmacniacze OE OB OC. na tranzystorach bipolarnych
 Tranzystorowe wzmacniacze OE OB OC na tranzystorach bipolarnych Wzmacniacz jest to urządzenie elektroniczne, którego zadaniem jest : proporcjonalne zwiększenie amplitudy wszystkich składowych widma sygnału
Tranzystorowe wzmacniacze OE OB OC na tranzystorach bipolarnych Wzmacniacz jest to urządzenie elektroniczne, którego zadaniem jest : proporcjonalne zwiększenie amplitudy wszystkich składowych widma sygnału
Systemy. Krzysztof Patan
 Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Przyjmuje się umowę, że:
 MODELE OPERATOROWE Modele operatorowe elementów obwodów wyprowadza się wykorzystując znane zależności napięciowo-prądowe dla elementów R, L, C oraz źródeł idealnych. Modele te opisują zależności pomiędzy
MODELE OPERATOROWE Modele operatorowe elementów obwodów wyprowadza się wykorzystując znane zależności napięciowo-prądowe dla elementów R, L, C oraz źródeł idealnych. Modele te opisują zależności pomiędzy
Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, Spis treści
 Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, 2013 Spis treści Słowo wstępne 8 Wymagania egzaminacyjne 9 Wykaz symboli graficznych 10 Lekcja 1. Podstawowe prawa
Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, 2013 Spis treści Słowo wstępne 8 Wymagania egzaminacyjne 9 Wykaz symboli graficznych 10 Lekcja 1. Podstawowe prawa
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
ANALIZA WŁAŚCIWOŚCI FILTRU PARAMETRYCZNEGO I RZĘDU
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 78 Electrical Engineering 2014 Seweryn MAZURKIEWICZ* Janusz WALCZAK* ANALIZA WŁAŚCIWOŚCI FILTRU PARAMETRYCZNEGO I RZĘDU W artykule rozpatrzono problem
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 78 Electrical Engineering 2014 Seweryn MAZURKIEWICZ* Janusz WALCZAK* ANALIZA WŁAŚCIWOŚCI FILTRU PARAMETRYCZNEGO I RZĘDU W artykule rozpatrzono problem
Transmitancje układów ciągłych
 Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Transmitancja operatorowa, podstawowe człony liniowe Transmitancja operatorowa (funkcja przejścia, G(s)) stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego
Metody numeryczne I Równania nieliniowe
 Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe
 Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe Przetworniki cyfrowo / analogowe W cyfrowych systemach pomiarowych często zachodzi konieczność zmiany sygnału cyfrowego na analogowy, np. w celu
Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe Przetworniki cyfrowo / analogowe W cyfrowych systemach pomiarowych często zachodzi konieczność zmiany sygnału cyfrowego na analogowy, np. w celu
WSTĘP DO ELEKTRONIKI
 WSTĘP DO ELEKTRONIKI Część IV Czwórniki Linia długa Janusz Brzychczyk IF UJ Czwórniki Czwórnik (dwuwrotnik) posiada cztery zaciski elektryczne. Dwa z tych zacisków uważamy za wejście czwórnika, a pozostałe
WSTĘP DO ELEKTRONIKI Część IV Czwórniki Linia długa Janusz Brzychczyk IF UJ Czwórniki Czwórnik (dwuwrotnik) posiada cztery zaciski elektryczne. Dwa z tych zacisków uważamy za wejście czwórnika, a pozostałe
Metody Numeryczne w Budowie Samolotów/Śmigłowców Wykład I
 Metody Numeryczne w Budowie Samolotów/Śmigłowców Wykład I dr inż. Tomasz Goetzendorf-Grabowski (tgrab@meil.pw.edu.pl) Dęblin, 11 maja 2009 1 Organizacja wykładu 5 dni x 6 h = 30 h propozycja zmiany: 6
Metody Numeryczne w Budowie Samolotów/Śmigłowców Wykład I dr inż. Tomasz Goetzendorf-Grabowski (tgrab@meil.pw.edu.pl) Dęblin, 11 maja 2009 1 Organizacja wykładu 5 dni x 6 h = 30 h propozycja zmiany: 6
Rys. 1. Przebieg napięcia u D na diodzie D
 Zadanie 7. Zaprojektować przekształtnik DC-DC obniżający napięcie tak, aby mógł on zasilić odbiornik o charakterze rezystancyjnym R =,5 i mocy P = 10 W. Napięcie zasilające = 10 V. Częstotliwość przełączania
Zadanie 7. Zaprojektować przekształtnik DC-DC obniżający napięcie tak, aby mógł on zasilić odbiornik o charakterze rezystancyjnym R =,5 i mocy P = 10 W. Napięcie zasilające = 10 V. Częstotliwość przełączania
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych
 Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
ELEMENTY ANALIZY NUMERYCZNEJ ELEMENTY ANALIZY NUMERYCZNEJ. Egzamin pisemny zestaw 1 24 czerwca 2019 roku
 Egzamin pisemny zestaw. ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x n, to funkcja x0 x gx ( ) + [ gx (
Egzamin pisemny zestaw. ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x n, to funkcja x0 x gx ( ) + [ gx (
ELEMENTY ANALIZY NUMERYCZNEJ ELEMENTY ANALIZY NUMERYCZNEJ. Egzamin pisemny zestaw 1 26 czerwca 2017 roku
 Egzamin pisemny zestaw czerwca 0 roku Imię i nazwisko:.... ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x
Egzamin pisemny zestaw czerwca 0 roku Imię i nazwisko:.... ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x
1 Równania nieliniowe
 1 Równania nieliniowe 1.1 Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym jest numeryczne poszukiwanie rozwiązań równań nieliniowych, np. algebraicznych (wielomiany),
1 Równania nieliniowe 1.1 Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym jest numeryczne poszukiwanie rozwiązań równań nieliniowych, np. algebraicznych (wielomiany),
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
1 Metody rozwiązywania równań nieliniowych. Postawienie problemu
 1 Metody rozwiązywania równań nieliniowych. Postawienie problemu Dla danej funkcji ciągłej f znaleźć wartości x, dla których f(x) = 0. (1) 2 Przedział izolacji pierwiastka Będziemy zakładać, że równanie
1 Metody rozwiązywania równań nieliniowych. Postawienie problemu Dla danej funkcji ciągłej f znaleźć wartości x, dla których f(x) = 0. (1) 2 Przedział izolacji pierwiastka Będziemy zakładać, że równanie
przy warunkach początkowych: 0 = 0, 0 = 0
 MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
Wpływ nieliniowości elementów układu pomiarowego na błąd pomiaru impedancji
 Wpływ nieliniowości elementów układu pomiarowego na błąd pomiaru impedancji Wiesław Miczulski* W artykule przedstawiono wyniki badań ilustrujące wpływ nieliniowości elementów układu porównania napięć na
Wpływ nieliniowości elementów układu pomiarowego na błąd pomiaru impedancji Wiesław Miczulski* W artykule przedstawiono wyniki badań ilustrujące wpływ nieliniowości elementów układu porównania napięć na
Filtry aktywne filtr środkowoprzepustowy
 Filtry aktywne iltr środkowoprzepustowy. Cel ćwiczenia. Celem ćwiczenia jest praktyczne poznanie właściwości iltrów aktywnych, metod ich projektowania oraz pomiaru podstawowych parametrów iltru.. Budowa
Filtry aktywne iltr środkowoprzepustowy. Cel ćwiczenia. Celem ćwiczenia jest praktyczne poznanie właściwości iltrów aktywnych, metod ich projektowania oraz pomiaru podstawowych parametrów iltru.. Budowa
Przekształcanie schematów blokowych. Podczas ćwiczenia poruszane będą następujące zagadnienia:
 Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
rezonansu rezonansem napięć rezonansem szeregowym rezonansem prądów rezonansem równoległym
 Lekcja szósta poświęcona będzie analizie zjawisk rezonansowych w obwodzie RLC. Zjawiskiem rezonansu nazywamy taki stan obwodu RLC przy którym prąd i napięcie są ze sobą w fazie. W stanie rezonansu przesunięcie
Lekcja szósta poświęcona będzie analizie zjawisk rezonansowych w obwodzie RLC. Zjawiskiem rezonansu nazywamy taki stan obwodu RLC przy którym prąd i napięcie są ze sobą w fazie. W stanie rezonansu przesunięcie
Przetworniki cyfrowo-analogowe C-A CELE ĆWICZEŃ PODSTAWY TEORETYCZNE
 Przetworniki cyfrowo-analogowe C-A CELE ĆWICZEŃ Zrozumienie zasady działania przetwornika cyfrowo-analogowego. Poznanie podstawowych parametrów i działania układu DAC0800. Poznanie sposobu generacji symetrycznego
Przetworniki cyfrowo-analogowe C-A CELE ĆWICZEŃ Zrozumienie zasady działania przetwornika cyfrowo-analogowego. Poznanie podstawowych parametrów i działania układu DAC0800. Poznanie sposobu generacji symetrycznego
Wprowadzenie Metoda bisekcji Metoda regula falsi Metoda siecznych Metoda stycznych RÓWNANIA NIELINIOWE
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Zazwyczaj nie można znaleźć
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Zazwyczaj nie można znaleźć
ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów
 ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów. Cel ćwiczenia Badanie układów pierwszego rzędu różniczkującego, całkującego
ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów. Cel ćwiczenia Badanie układów pierwszego rzędu różniczkującego, całkującego
Wzmacniacze operacyjne
 Wzmacniacze operacyjne Cel ćwiczenia Celem ćwiczenia jest badanie podstawowych układów pracy wzmacniaczy operacyjnych. Wymagania Wstęp 1. Zasada działania wzmacniacza operacyjnego. 2. Ujemne sprzężenie
Wzmacniacze operacyjne Cel ćwiczenia Celem ćwiczenia jest badanie podstawowych układów pracy wzmacniaczy operacyjnych. Wymagania Wstęp 1. Zasada działania wzmacniacza operacyjnego. 2. Ujemne sprzężenie
Wzmacniacz jako generator. Warunki generacji
 Generatory napięcia sinusoidalnego Drgania sinusoidalne można uzyskać Poprzez utworzenie wzmacniacza, który dla jednej częstotliwości miałby wzmocnienie równe nieskończoności. Poprzez odtłumienie rzeczywistego
Generatory napięcia sinusoidalnego Drgania sinusoidalne można uzyskać Poprzez utworzenie wzmacniacza, który dla jednej częstotliwości miałby wzmocnienie równe nieskończoności. Poprzez odtłumienie rzeczywistego
Funkcje wymierne. Jerzy Rutkowski. Działania dodawania i mnożenia funkcji wymiernych określa się wzorami: g h + k l g h k.
 Funkcje wymierne Jerzy Rutkowski Teoria Przypomnijmy, że przez R[x] oznaczamy zbiór wszystkich wielomianów zmiennej x i o współczynnikach rzeczywistych Definicja Funkcją wymierną jednej zmiennej nazywamy
Funkcje wymierne Jerzy Rutkowski Teoria Przypomnijmy, że przez R[x] oznaczamy zbiór wszystkich wielomianów zmiennej x i o współczynnikach rzeczywistych Definicja Funkcją wymierną jednej zmiennej nazywamy
KARTA MODUŁU KSZTAŁCENIA
 KARTA MODUŁU KSZTAŁCENIA I. Informacje ogólne I. 1 Nazwa modułu kształcenia Podstawy elektrotechniki i elektroniki I 2 Nazwa jednostki prowadzącej moduł Instytut Informatyki, Zakład Informatyki Stosowanej
KARTA MODUŁU KSZTAŁCENIA I. Informacje ogólne I. 1 Nazwa modułu kształcenia Podstawy elektrotechniki i elektroniki I 2 Nazwa jednostki prowadzącej moduł Instytut Informatyki, Zakład Informatyki Stosowanej
ROZWIĄZYWANIE RÓWNAŃ NIELINIOWYCH
 Transport, studia I stopnia Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym
Transport, studia I stopnia Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transform
 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Ćwiczenie: "Obwody prądu sinusoidalnego jednofazowego"
 Ćwiczenie: "Obwody prądu sinusoidalnego jednofazowego" Opracowane w ramach projektu: "Informatyka mój sposób na poznanie i opisanie świata realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres
Ćwiczenie: "Obwody prądu sinusoidalnego jednofazowego" Opracowane w ramach projektu: "Informatyka mój sposób na poznanie i opisanie świata realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres
WZMACNIACZ NAPIĘCIOWY RC
 WZMACNIACZ NAPIĘCIOWY RC 1. WSTĘP Tematem ćwiczenia są podstawowe właściwości jednostopniowego wzmacniacza pasmowego z tranzystorem bipolarnym. Zadaniem ćwiczących jest dokonanie pomiaru częstotliwości
WZMACNIACZ NAPIĘCIOWY RC 1. WSTĘP Tematem ćwiczenia są podstawowe właściwości jednostopniowego wzmacniacza pasmowego z tranzystorem bipolarnym. Zadaniem ćwiczących jest dokonanie pomiaru częstotliwości
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 7 BADANIE ODPOWIEDZI USTALONEJ NA OKRESOWY CIĄG IMPULSÓW 1. Cel ćwiczenia Obserwacja przebiegów wyjściowych
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 7 BADANIE ODPOWIEDZI USTALONEJ NA OKRESOWY CIĄG IMPULSÓW 1. Cel ćwiczenia Obserwacja przebiegów wyjściowych
Metody analizy obwodów w stanie ustalonym
 Metody analizy obwodów w stanie ustalonym Stan ustalony Stanem ustalonym obwodu nazywać będziemy taki stan, w którym charakter odpowiedzi jest identyczny jak charakter wymuszenia, to znaczy odpowiedzią
Metody analizy obwodów w stanie ustalonym Stan ustalony Stanem ustalonym obwodu nazywać będziemy taki stan, w którym charakter odpowiedzi jest identyczny jak charakter wymuszenia, to znaczy odpowiedzią
Teoria obwodów elektrycznych / Stanisław Bolkowski. wyd dodruk (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Teoria obwodów elektrycznych / Stanisław Bolkowski. wyd. 10-1 dodruk (PWN). Warszawa, 2017 Spis treści Przedmowa 13 1. Wiadomości wstępne 15 1.1. Wielkości i jednostki używane w elektrotechnice 15 1.2.
Teoria obwodów elektrycznych / Stanisław Bolkowski. wyd. 10-1 dodruk (PWN). Warszawa, 2017 Spis treści Przedmowa 13 1. Wiadomości wstępne 15 1.1. Wielkości i jednostki używane w elektrotechnice 15 1.2.
Zaawansowane metody numeryczne
 Wykład 11 Ogólna postać metody iteracyjnej Definicja 11.1. (metoda iteracyjna rozwiązywania układów równań) Metodą iteracyjną rozwiązywania { układów równań liniowych nazywamy ciąg wektorów zdefiniowany
Wykład 11 Ogólna postać metody iteracyjnej Definicja 11.1. (metoda iteracyjna rozwiązywania układów równań) Metodą iteracyjną rozwiązywania { układów równań liniowych nazywamy ciąg wektorów zdefiniowany
Induktor i kondensator. Warunki początkowe. oraz ciągłość warunków początkowych
 Termin AREK73C Induktor i kondensator. Warunki początkowe Przyjmujemy t, u C oraz ciągłość warunków początkowych ( ) u ( ) i ( ) i ( ) C L L Prąd stały i(t) R u(t) u( t) Ri( t) I R RI i(t) L u(t) u() t
Termin AREK73C Induktor i kondensator. Warunki początkowe Przyjmujemy t, u C oraz ciągłość warunków początkowych ( ) u ( ) i ( ) i ( ) C L L Prąd stały i(t) R u(t) u( t) Ri( t) I R RI i(t) L u(t) u() t
0 gdy x s R i Jest równe tylko 0
 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ Seria: ELEKTRYKA z. 95 1985 Nr kol. 820 Lesław TOPÓR-KAMIŃSKI Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika Ślęska POŁĄCZENIA ELEMENTÓW
ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ Seria: ELEKTRYKA z. 95 1985 Nr kol. 820 Lesław TOPÓR-KAMIŃSKI Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechnika Ślęska POŁĄCZENIA ELEMENTÓW
ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI
 1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
/ ZESZYTY NAUKOWE POLITECHNIKI SLĄSKISJ Seria: ELEKTRYKA z. 103 Nr kol. 904
 / ZESZYTY NAUKOWE POLITECHNIKI SLĄSKISJ 1988 Seria: ELEKTRYKA z. 103 Nr kol. 904 Marian PĄSKO Tadeusz Swietlicki Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechniki Śląskiej
/ ZESZYTY NAUKOWE POLITECHNIKI SLĄSKISJ 1988 Seria: ELEKTRYKA z. 103 Nr kol. 904 Marian PĄSKO Tadeusz Swietlicki Instytut Podstawowych Problemów Elektrotechniki i Energoelektroniki Politechniki Śląskiej
Układy równań i równania wyższych rzędów
 Rozdział Układy równań i równania wyższych rzędów Układy równań różniczkowych zwyczajnych Wprowadzenie W poprzednich paragrafach zajmowaliśmy się równaniami różniczkowymi y = f(x, y), których rozwiązaniem
Rozdział Układy równań i równania wyższych rzędów Układy równań różniczkowych zwyczajnych Wprowadzenie W poprzednich paragrafach zajmowaliśmy się równaniami różniczkowymi y = f(x, y), których rozwiązaniem
Stabilność. Krzysztof Patan
 Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Ćwiczenie 2: pomiar charakterystyk i częstotliwości granicznych wzmacniacza napięcia REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU
 REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U LABORATORIUM pomiarów elektronicznych UKŁADÓW ANALOGOWYCH Ćwiczenie 2: pomiar charakterystyk i częstotliwości granicznych wzmacniacza
REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U LABORATORIUM pomiarów elektronicznych UKŁADÓW ANALOGOWYCH Ćwiczenie 2: pomiar charakterystyk i częstotliwości granicznych wzmacniacza
Metody iteracyjne rozwiązywania układów równań liniowych (5.3) Normy wektorów i macierzy (5.3.1) Niech. x i. i =1
 Normy wektorów i macierzy (5.3.1) Niech. x i. i =1") Normy wektorów i macierzy (5.3.1) Niech 1 X =[x x Y y =[y1 x n], oznaczają wektory przestrzeni R n, a yn] niech oznacza liczbę rzeczywistą. Wyrażenie x i p 5.3.1.a X p = p n i =1 nosi nazwę p-tej normy
Normy wektorów i macierzy (5.3.1) Niech 1 X =[x x Y y =[y1 x n], oznaczają wektory przestrzeni R n, a yn] niech oznacza liczbę rzeczywistą. Wyrażenie x i p 5.3.1.a X p = p n i =1 nosi nazwę p-tej normy
W celu obliczenia charakterystyki częstotliwościowej zastosujemy wzór 1. charakterystyka amplitudowa 0,
 Bierne obwody RC. Filtr dolnoprzepustowy. Filtr dolnoprzepustowy jest układem przenoszącym sygnały o małej częstotliwości bez zmian, a powodującym tłumienie i opóźnienie fazy sygnałów o większych częstotliwościach.
Bierne obwody RC. Filtr dolnoprzepustowy. Filtr dolnoprzepustowy jest układem przenoszącym sygnały o małej częstotliwości bez zmian, a powodującym tłumienie i opóźnienie fazy sygnałów o większych częstotliwościach.
BADANIE FILTRÓW. Instytut Fizyki Akademia Pomorska w Słupsku
 BADANIE FILTRÓW Cel ćwiczenia. Celem ćwiczenia jest zapoznanie się z właściwościami filtrów. Zagadnienia teoretyczne. Filtry częstotliwościowe Filtrem nazywamy układ o strukturze czwórnika, który przepuszcza
BADANIE FILTRÓW Cel ćwiczenia. Celem ćwiczenia jest zapoznanie się z właściwościami filtrów. Zagadnienia teoretyczne. Filtry częstotliwościowe Filtrem nazywamy układ o strukturze czwórnika, który przepuszcza
Ćwiczenie nr 8. Podstawowe czwórniki aktywne i ich zastosowanie cz. 1
 Ćwiczenie nr Podstawowe czwórniki aktywne i ich zastosowanie cz.. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobem realizacji czwórników aktywnych opartym na wzmacniaczu operacyjnym µa, ich
Ćwiczenie nr Podstawowe czwórniki aktywne i ich zastosowanie cz.. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobem realizacji czwórników aktywnych opartym na wzmacniaczu operacyjnym µa, ich
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
dr inż. Krzysztof Stawicki
 Wybrane zagadnienia teorii obwodów 1 dr inż. Krzysztof Stawicki e-mail: ks@zut.edu.pl w temacie wiadomości proszę wpisać tylko słowo STUDENT strona www: ks.zut.edu.pl/wzto 2 Wybrane zagadnienia teorii
Wybrane zagadnienia teorii obwodów 1 dr inż. Krzysztof Stawicki e-mail: ks@zut.edu.pl w temacie wiadomości proszę wpisać tylko słowo STUDENT strona www: ks.zut.edu.pl/wzto 2 Wybrane zagadnienia teorii
Matematyka stosowana i metody numeryczne
 Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 6 Rozwiązywanie równań nieliniowych Rozwiązaniem lub pierwiastkiem równania f(x) = 0 lub g(x) = h(x)
Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 6 Rozwiązywanie równań nieliniowych Rozwiązaniem lub pierwiastkiem równania f(x) = 0 lub g(x) = h(x)
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać układu równań liniowych Układ liniowych równań algebraicznych
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać układu równań liniowych Układ liniowych równań algebraicznych
5. Rozwiązywanie układów równań liniowych
 5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
R 1 = 20 V J = 4,0 A R 1 = 5,0 Ω R 2 = 3,0 Ω X L = 6,0 Ω X C = 2,5 Ω. Rys. 1.
 EROELEKR Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 9/ Rozwiązania zadań dla grupy elektrycznej na zawody stopnia adanie nr (autor dr inŝ. Eugeniusz RoŜnowski) Stosując twierdzenie
EROELEKR Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 9/ Rozwiązania zadań dla grupy elektrycznej na zawody stopnia adanie nr (autor dr inŝ. Eugeniusz RoŜnowski) Stosując twierdzenie
Elementy elektroniczne i przyrządy pomiarowe
 Elementy elektroniczne i przyrządy pomiarowe Cel ćwiczenia. Nabycie umiejętności posługiwania się miernikami uniwersalnymi, oscyloskopem, generatorem, zasilaczem, itp. Nabycie umiejętności rozpoznawania
Elementy elektroniczne i przyrządy pomiarowe Cel ćwiczenia. Nabycie umiejętności posługiwania się miernikami uniwersalnymi, oscyloskopem, generatorem, zasilaczem, itp. Nabycie umiejętności rozpoznawania
BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO
 Ćwiczenie 11 BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO 11.1 Cel ćwiczenia Celem ćwiczenia jest poznanie rodzajów, budowy i właściwości przerzutników astabilnych, monostabilnych oraz
Ćwiczenie 11 BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO 11.1 Cel ćwiczenia Celem ćwiczenia jest poznanie rodzajów, budowy i właściwości przerzutników astabilnych, monostabilnych oraz
Liniowe układy scalone. Filtry aktywne w oparciu o wzmacniacze operacyjne
 Liniowe układy scalone Filtry aktywne w oparciu o wzmacniacze operacyjne Wiadomości ogólne (1) Zadanie filtrów aktywnych przepuszczanie sygnałów znajdujących się w pewnym zakresie częstotliwości pasmo
Liniowe układy scalone Filtry aktywne w oparciu o wzmacniacze operacyjne Wiadomości ogólne (1) Zadanie filtrów aktywnych przepuszczanie sygnałów znajdujących się w pewnym zakresie częstotliwości pasmo
WZMACNIACZ OPERACYJNY
 1. OPIS WKŁADKI DA 01A WZMACNIACZ OPERACYJNY Wkładka DA01A zawiera wzmacniacz operacyjny A 71 oraz zestaw zacisków, które umożliwiają dołączenie elementów zewnętrznych: rezystorów, kondensatorów i zwór.
1. OPIS WKŁADKI DA 01A WZMACNIACZ OPERACYJNY Wkładka DA01A zawiera wzmacniacz operacyjny A 71 oraz zestaw zacisków, które umożliwiają dołączenie elementów zewnętrznych: rezystorów, kondensatorów i zwór.
Analiza numeryczna Kurs INP002009W. Wykłady 6 i 7 Rozwiązywanie układów równań liniowych. Karol Tarnowski A-1 p.
 Analiza numeryczna Kurs INP002009W Wykłady 6 i 7 Rozwiązywanie układów równań liniowych Karol Tarnowski karol.tarnowski@pwr.wroc.pl A-1 p.223 Plan wykładu Podstawowe pojęcia Własności macierzy Działania
Analiza numeryczna Kurs INP002009W Wykłady 6 i 7 Rozwiązywanie układów równań liniowych Karol Tarnowski karol.tarnowski@pwr.wroc.pl A-1 p.223 Plan wykładu Podstawowe pojęcia Własności macierzy Działania
Ćwiczenie 3 BADANIE OBWODÓW PRĄDU SINUSOIDALNEGO Z ELEMENTAMI RLC
 Ćwiczenie 3 3.1. Cel ćwiczenia BADANE OBWODÓW PRĄD SNSODANEGO Z EEMENTAM RC Zapoznanie się z własnościami prostych obwodów prądu sinusoidalnego utworzonych z elementów RC. Poznanie zasad rysowania wykresów
Ćwiczenie 3 3.1. Cel ćwiczenia BADANE OBWODÓW PRĄD SNSODANEGO Z EEMENTAM RC Zapoznanie się z własnościami prostych obwodów prądu sinusoidalnego utworzonych z elementów RC. Poznanie zasad rysowania wykresów
METODA MACIERZOWA OBLICZANIA OBWODÓW PRĄDU PRZEMIENNEGO
 POZNAN UNIVERSITY OF TECHNOLOGY ACADEMIC JOURNALS No 93 Electrical Engineering 2018 DOI 10.21008/j.1897-0737.2018.93.0026 Piotr FRĄCZAK METODA MACIERZOWA OBLICZANIA OBWODÓW PRĄDU PRZEMIENNEGO W pracy przedstawiono
POZNAN UNIVERSITY OF TECHNOLOGY ACADEMIC JOURNALS No 93 Electrical Engineering 2018 DOI 10.21008/j.1897-0737.2018.93.0026 Piotr FRĄCZAK METODA MACIERZOWA OBLICZANIA OBWODÓW PRĄDU PRZEMIENNEGO W pracy przedstawiono
Politechnika Białostocka
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: UKŁADY ELEKTRONICZNE 2 (TS1C500 030) Tranzystor w układzie wzmacniacza
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: UKŁADY ELEKTRONICZNE 2 (TS1C500 030) Tranzystor w układzie wzmacniacza
Przetworniki C/A. Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego
 Przetworniki C/A Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego Przetwarzanie C/A i A/C Większość rzeczywistych sygnałów to sygnały analogowe. By je przetwarzać w dzisiejszych
Przetworniki C/A Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego Przetwarzanie C/A i A/C Większość rzeczywistych sygnałów to sygnały analogowe. By je przetwarzać w dzisiejszych
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH
 POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST Semestr letni Wykład nr 2 Prawo autorskie Niniejsze
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST Semestr letni Wykład nr 2 Prawo autorskie Niniejsze
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
Teoria sterowania - studia niestacjonarne AiR 2 stopień
 Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
42. Prąd stały. Prawa, twierdzenia, metody obliczeniowe
 Prąd stały. Prawa, twierdzenia, metody obliczeniowe 42. Prąd stały. Prawa, twierdzenia, metody obliczeniowe Celem ćwiczenia jest doświadczalne sprawdzenie praw obowiązujących w obwodach prądu stałego,
Prąd stały. Prawa, twierdzenia, metody obliczeniowe 42. Prąd stały. Prawa, twierdzenia, metody obliczeniowe Celem ćwiczenia jest doświadczalne sprawdzenie praw obowiązujących w obwodach prądu stałego,
WYMAGANIA DOTYCZĄCE ZALICZENIA ZAJĘĆ
 Nazwa przedmiotu: Techniki symulacji Kod przedmiotu: ES1C300 015 Forma zajęć: pracownia specjalistyczna Kierunek: elektrotechnika Rodzaj studiów: stacjonarne, I stopnia (inŝynierskie) Semestr studiów:
Nazwa przedmiotu: Techniki symulacji Kod przedmiotu: ES1C300 015 Forma zajęć: pracownia specjalistyczna Kierunek: elektrotechnika Rodzaj studiów: stacjonarne, I stopnia (inŝynierskie) Semestr studiów:
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Część 2 Analiza obwodów w stanie ustalonym przy wymuszeniu sinusoidalnym Przypomnienie ostatniego wykładu Prąd i napięcie Podstawowe
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Część 2 Analiza obwodów w stanie ustalonym przy wymuszeniu sinusoidalnym Przypomnienie ostatniego wykładu Prąd i napięcie Podstawowe
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
POŁÓWKOWO-PASMOWE FILTRY CYFROWE
 Krzysztof Sozański POŁÓWKOWOPASMOWE FILTRY CYFROWE W pracy przedstawiono połówkowopasmowe filtry cyfrowe. Opisano dwa typy filtrów: pierwszy z zastosowaniem filtrów typu FIR oraz drugi typu IIR. Filtry
Krzysztof Sozański POŁÓWKOWOPASMOWE FILTRY CYFROWE W pracy przedstawiono połówkowopasmowe filtry cyfrowe. Opisano dwa typy filtrów: pierwszy z zastosowaniem filtrów typu FIR oraz drugi typu IIR. Filtry
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
A-2. Filtry bierne. wersja
 wersja 04 2014 1. Zakres ćwiczenia Celem ćwiczenia jest zrozumienie propagacji sygnałów zmiennych w czasie przez układy filtracji oparte na elementach rezystancyjno-pojemnościowych. Wyznaczenie doświadczalne
wersja 04 2014 1. Zakres ćwiczenia Celem ćwiczenia jest zrozumienie propagacji sygnałów zmiennych w czasie przez układy filtracji oparte na elementach rezystancyjno-pojemnościowych. Wyznaczenie doświadczalne
Celem dwiczenia jest poznanie budowy i właściwości czwórników liniowych, a mianowicie : układu różniczkującego i całkującego.
 1 DWICZENIE 2 PRZENOSZENIE IMPULSÓW PRZEZ CZWÓRNIKI LINIOWE 2.1. Cel dwiczenia Celem dwiczenia jest poznanie budowy i właściwości czwórników liniowych, a mianowicie : układu różniczkującego i całkującego.
1 DWICZENIE 2 PRZENOSZENIE IMPULSÓW PRZEZ CZWÓRNIKI LINIOWE 2.1. Cel dwiczenia Celem dwiczenia jest poznanie budowy i właściwości czwórników liniowych, a mianowicie : układu różniczkującego i całkującego.
Własności i charakterystyki czwórników
 Własności i charakterystyki czwórników nstytut Fizyki kademia Pomorska w Słupsku Cel ćwiczenia. Celem ćwiczenia jest poznanie własności i charakterystyk czwórników. Zagadnienia teoretyczne. Pojęcia podstawowe
Własności i charakterystyki czwórników nstytut Fizyki kademia Pomorska w Słupsku Cel ćwiczenia. Celem ćwiczenia jest poznanie własności i charakterystyk czwórników. Zagadnienia teoretyczne. Pojęcia podstawowe
Obwody prądu zmiennego
 Obwody prądu zmiennego Prąd stały ( ) ( ) i t u t const const ( ) u( t) i t Prąd zmienny, dowolne funkcje czasu i( t) t t u ( t) t t Natężenie prądu i umowny kierunek prądu Prąd stały Q t Kierunek poruszania
Obwody prądu zmiennego Prąd stały ( ) ( ) i t u t const const ( ) u( t) i t Prąd zmienny, dowolne funkcje czasu i( t) t t u ( t) t t Natężenie prądu i umowny kierunek prądu Prąd stały Q t Kierunek poruszania
Opis systemów dynamicznych w przestrzeni stanu. Wojciech Kurek , Gdańsk
 Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Opis systemów dynamicznych Mieczysław Brdyś 27.09.2010, Gdańsk Rozważmy układ RC przedstawiony na rysunku poniżej: wejscie u(t) R C wyjście y(t)=vc(t) Niech u(t) = 2 + sin(t) dla t t 0 gdzie t 0 to chwila
Ćwiczenie 1. Sprawdzanie podstawowych praw w obwodach elektrycznych przy wymuszeniu stałym
 Ćwiczenie 1 Sprawdzanie podstawowych praw w obwodach elektrycznych przy wymuszeniu stałym Wprowadzenie Celem ćwiczenia jest sprawdzenie podstawowych praw elektrotechniki w obwodach prądu stałego. Badaniu
Ćwiczenie 1 Sprawdzanie podstawowych praw w obwodach elektrycznych przy wymuszeniu stałym Wprowadzenie Celem ćwiczenia jest sprawdzenie podstawowych praw elektrotechniki w obwodach prądu stałego. Badaniu
u (0) = 0 i(0) = 0 Obwód RLC Odpowiadający mu schemat operatorowy E s 1 sc t = 0 i(t) w u R (t) E u C (t) C
 = 0 i(0) = 0 Obwód RLC Odpowiadający mu schemat operatorowy E s 1 sc t = 0 i(t) w u R (t) E u C (t) C") Obwód RLC t = 0 i(t) R L w u R (t) u L (t) E u C (t) C Odpowiadający mu schemat operatorowy R I Dla zerowych warunków początkowych na cewce i kondensatorze 1 sc sl u (0) = 0 C E s i(0) = 0 Prąd I w obwodzie
Obwód RLC t = 0 i(t) R L w u R (t) u L (t) E u C (t) C Odpowiadający mu schemat operatorowy R I Dla zerowych warunków początkowych na cewce i kondensatorze 1 sc sl u (0) = 0 C E s i(0) = 0 Prąd I w obwodzie
Pracownia Automatyki i Elektrotechniki Katedry Tworzyw Drzewnych Ćwiczenie 1. Połączenia szeregowe oraz równoległe elementów RC
 Pracownia Automatyki i Elektrotechniki Katedry Tworzyw Drzewnych Ćwiczenie ĆWICZENIE Połączenia szeregowe oraz równoległe elementów C. CEL ĆWICZENIA Celem ćwiczenia jest praktyczno-analityczna ocena wartości
Pracownia Automatyki i Elektrotechniki Katedry Tworzyw Drzewnych Ćwiczenie ĆWICZENIE Połączenia szeregowe oraz równoległe elementów C. CEL ĆWICZENIA Celem ćwiczenia jest praktyczno-analityczna ocena wartości
Tranzystory bipolarne. Małosygnałowe parametry tranzystorów.
 ĆWICZENIE 3 Tranzystory bipolarne. Małosygnałowe parametry tranzystorów. I. Cel ćwiczenia Celem ćwiczenia jest wyznaczenie małosygnałowych parametrów tranzystorów bipolarnych na podstawie ich charakterystyk
ĆWICZENIE 3 Tranzystory bipolarne. Małosygnałowe parametry tranzystorów. I. Cel ćwiczenia Celem ćwiczenia jest wyznaczenie małosygnałowych parametrów tranzystorów bipolarnych na podstawie ich charakterystyk
RÓWNANIA RÓŻNICZKOWE WYKŁAD 4
 RÓWNANIA RÓŻNICZKOWE WYKŁAD 4 Obszar określoności równania Jeżeli występująca w równaniu y' f ( x, y) funkcja f jest ciągła, to równanie posiada rozwiązanie. Jeżeli f jest nieokreślona w punkcie (x 0,
RÓWNANIA RÓŻNICZKOWE WYKŁAD 4 Obszar określoności równania Jeżeli występująca w równaniu y' f ( x, y) funkcja f jest ciągła, to równanie posiada rozwiązanie. Jeżeli f jest nieokreślona w punkcie (x 0,
SYMULACJA ZAKŁÓCEŃ W UKŁADACH AUTOMATYKI UTWORZONYCH ZA POMOCĄ OBWODÓW ELEKTRYCZNYCH W PROGRAMACH MATHCAD I PSPICE
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 76 Electrical Engineering 2013 Piotr FRĄCZAK* SYMULACJA ZAKŁÓCEŃ W UKŁADACH AUTOMATYKI UTWORZONYCH ZA POMOCĄ OBWODÓW ELEKTRYCZNYCH W PROGRAMACH MATHCAD
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 76 Electrical Engineering 2013 Piotr FRĄCZAK* SYMULACJA ZAKŁÓCEŃ W UKŁADACH AUTOMATYKI UTWORZONYCH ZA POMOCĄ OBWODÓW ELEKTRYCZNYCH W PROGRAMACH MATHCAD
Obwody elektryczne prądu stałego
 Obwody elektryczne prądu stałego Dr inż. Andrzej Skiba Katedra Elektrotechniki Teoretycznej i Informatyki Politechniki Gdańskiej Gdańsk 12 grudnia 2015 Plan wykładu: 1. Rozwiązanie zadania z poprzedniego
Obwody elektryczne prądu stałego Dr inż. Andrzej Skiba Katedra Elektrotechniki Teoretycznej i Informatyki Politechniki Gdańskiej Gdańsk 12 grudnia 2015 Plan wykładu: 1. Rozwiązanie zadania z poprzedniego
Przekształcanie równań stanu do postaci kanonicznej diagonalnej
 Przekształcanie równań stanu do postaci kanonicznej diagonalnej Przygotowanie: Dariusz Pazderski Liniowe przekształcenie równania stanu Rozważmy liniowe równanie stanu i równanie wyjścia układu niesingularnego
Przekształcanie równań stanu do postaci kanonicznej diagonalnej Przygotowanie: Dariusz Pazderski Liniowe przekształcenie równania stanu Rozważmy liniowe równanie stanu i równanie wyjścia układu niesingularnego
WIECZOROWE STUDIA NIESTACJONARNE LABORATORIUM UKŁADÓW ELEKTRONICZNYCH
 POLITECHNIKA WARSZAWSKA Instytut Radioelektroniki Zakład Radiokomunikacji WIECZOROWE STUDIA NIESTACJONARNE Semestr III LABORATORIUM UKŁADÓW ELEKTRONICZNYCH Ćwiczenie Temat: Badanie wzmacniacza operacyjnego
POLITECHNIKA WARSZAWSKA Instytut Radioelektroniki Zakład Radiokomunikacji WIECZOROWE STUDIA NIESTACJONARNE Semestr III LABORATORIUM UKŁADÓW ELEKTRONICZNYCH Ćwiczenie Temat: Badanie wzmacniacza operacyjnego
( ) + ( ) T ( ) + E IE E E. Obliczanie gradientu błędu metodą układu dołączonego
 + ( ) T ( ) + E IE E E. Obliczanie gradientu błędu metodą układu dołączonego") Obliczanie gradientu błędu metodą uładu dołączonego /9 Obliczanie gradientu błędu metodą uładu dołączonego Chodzi o wyznaczenie pochodnych cząstowych funcji błędu E względem parametrów elementów uładu
Obliczanie gradientu błędu metodą uładu dołączonego /9 Obliczanie gradientu błędu metodą uładu dołączonego Chodzi o wyznaczenie pochodnych cząstowych funcji błędu E względem parametrów elementów uładu
VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa.
 VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa. W rozdziale tym zajmiemy się dokładniej badaniem stabilności rozwiązań równania różniczkowego. Pojęcie stabilności w
VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa. W rozdziale tym zajmiemy się dokładniej badaniem stabilności rozwiązań równania różniczkowego. Pojęcie stabilności w
Programowanie celowe #1
 Programowanie celowe #1 Problem programowania celowego (PC) jest przykładem problemu programowania matematycznego nieliniowego, który można skutecznie zlinearyzować, tzn. zapisać (i rozwiązać) jako problem
Programowanie celowe #1 Problem programowania celowego (PC) jest przykładem problemu programowania matematycznego nieliniowego, który można skutecznie zlinearyzować, tzn. zapisać (i rozwiązać) jako problem
Laboratorium Półprzewodniki Dielektryki Magnetyki Ćwiczenie nr 8
 Laboratorium Półprzewodniki Dielektryki Magnetyki Ćwiczenie nr 8 Analiza właściwości zmiennoprądowych materiałów i elementów elektronicznych I. Zagadnienia do przygotowania:. Wykonanie i przedstawienie
Laboratorium Półprzewodniki Dielektryki Magnetyki Ćwiczenie nr 8 Analiza właściwości zmiennoprądowych materiałów i elementów elektronicznych I. Zagadnienia do przygotowania:. Wykonanie i przedstawienie
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII. Roman Kaula
 POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
Modelowanie diod półprzewodnikowych
 Modelowanie diod półprzewodnikowych Programie PSPICE wbudowane są modele wielu elementów półprzewodnikowych takich jak diody, tranzystory bipolarne, tranzystory dipolowe złączowe, tranzystory MOSFET, tranzystory
Modelowanie diod półprzewodnikowych Programie PSPICE wbudowane są modele wielu elementów półprzewodnikowych takich jak diody, tranzystory bipolarne, tranzystory dipolowe złączowe, tranzystory MOSFET, tranzystory
9. METODY SIECIOWE (ALGORYTMICZNE) ANALIZY OBWODÓW LINIOWYCH
 ANALIZY OBWODÓW LINIOWYCH") OBWOD SGNAŁ 9. METOD SECOWE (ALGORTMCZNE) ANALZ OBWODÓW LNOWCH 9.. WPROWADZENE ANALZA OBWODÓW Jeżeli przy badaniu obwodu elektrycznego dane są parametry elementów i schemat obwodu, a poszukiwane są napięcia
OBWOD SGNAŁ 9. METOD SECOWE (ALGORTMCZNE) ANALZ OBWODÓW LNOWCH 9.. WPROWADZENE ANALZA OBWODÓW Jeżeli przy badaniu obwodu elektrycznego dane są parametry elementów i schemat obwodu, a poszukiwane są napięcia