Optymalizacja i Sterowanie
|
|
|
- Karolina Borkowska
- 6 lat temu
- Przeglądów:
Transkrypt
1 50 lat Komitetu Mechaniki PAN 14 kwietnia 2010 Optymalizacja i Sterowanie Tadeusz Burczyński Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki Wydział Mechaniczny Technologiczny Politechnika Śląska Instytut Informatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska
2 Klasyfikacja zadań mechaniki Zadanie bezpośrednie (analiza) Zadania odwrotne: - Optymalizacja - Identyfikacja - Sterowanie
3 Optymalizacja 3
4 x * argmin f ( x ) xd Zadanie optymalizacji Zadanie optymalizacji można sformułować następująco dana jest metryczna przestrzeń poszukiwań Ω=(U, ), gdzie U jest zbiorem wartości, metryką oraz podzbiór D U. Dana jest także funkcja celu f(x): U R Zadanie optymalizacji polega na znalezieniu takiego x*d, że: x* argmin ( x) f xd 4
5
6
7
8
9 Rodzaje zadań (1) W zależności od przestrzeni przeszukiwań, mówimy o sześciu rodzajach optymalizacji: 1. Optymalizacja parametryczna zakłada się, że punkt xu jest wektorem zmiennych niezależnych, z których każda przyjmuje pewną wartość; 2. Optymalizacja ciągła charakteryzuje się tym, że przestrzeń przeszukiwań jest iloczynem kartezjańskim zbioru liczb rzeczywistych U=Rn. Rozróżniamy tutaj zadania wypukłe i optymalizacji globalnej; 3. Optymalizacja dyskretna mówimy o niej, gdy wartości zmiennych niezależnych xi należą do zbiory dyskretnego U=Zn; 9
10 Rodzaje zadań (2) 4. Optymalizacja kombinatoryczna każda ze zmiennych niezależnych przyjmuje wartość logiczną prawda albo fałsz, czyli U=Zn2. Są też przypadki mieszane część zmiennych niezależnych przyjmuje wartości ze zbioru liczb rzeczywistych, część zaś całkowitych; 5. Optymalizacja bez ograniczeń gdy zbiór dopuszczalny D może być tożsamy z przestrzenią przeszukiwań U; 6. Optymalizacja z ograniczeniami gdy zbiór dopuszczalny D nie może być tożsamy z przestrzenią przeszukiwań U. 10
11 Sformułowanie zagadnienia optymalizacji w mechanice gdzie min J o x J 0 funkcja celu opisana x x, x,..., x,... x 1 2 i n - wektor zmiennych decyzyjnych x i zmienne decyzyjne opisujące parametry geometryczne lub materiałowe ograniczenia: J x x x, i,1,2,.. n min max i i i J J ( u,,, T, q, t), 0,1,2,... m 0, 1,2,.. m
12 Optymalizacja wielokryterialna Znajdź wektor x [ x1, x2,... x ] T n Warunki ograniczające g ( x) 0 i 1,2,..., m i h ( x) 0 i 1,2,..., p i Który minimalizuje funkcję wektorową składającą się z k funkcji celu f f1 f2 f k ( x) ( x), ( x),..., ( x) T
 f gdzie: k liczba funkcji celu; Jak wybrać wagi?")
13 Metoda współczynników wagowych k f ( x) wif i( x) i1 (f 1, f 2,..., f k,) f gdzie: k liczba funkcji celu; Jak wybrać wagi? x poszukiwany wektor; w i współczynniki wagowe w i 0,1 k i1 w i 1
14 Koncepcja frontu Pareto Dla zagadnienia minimalizacji zbiór k funkcji celu: f(x)=(f 1 (x),f 2 (x),...,f k (x)); rozwiązanie x jest zdominowane, jeśli istnieje rozwiązanie y nie gorsze od x dla każej funkcji celu f i : f i (y) f i (x) (i=1,... k) w przeciwnym razie x jest niezdominowanym rozwiązaniem
15 Koncepcja frontu Pareto Przykład dwóch kryteriów
16 Optymalizacja wielokryterialna
17 Optymalizacja w mechanice Podział zadań optymalizacji: - Optymalizacja wymiarów poprzecznych - Optymalizacja materiału - Optymalizacja kształtu - Optymalizacja topologiczna
18 Kryteria optymalizacji Kryteria naprężeniowe (wytrzymałościowe) Kryteria sztywnościowe lub podatnościowe (globalne) Kryteria sztywnościowe lokalne (zależne od przemieszczeń) Kryteria częstotliwościowe Kryteria dynamiczne Kryteria trwałościowe i niezawodnościowe
19 IDENTYFIKACJA zajmuje się określeniem parametrów modelu układu mechanicznych w których nieznane są: geometria układu liczba, rodzaj, kształt i położenie dfektów własności materiałowe na podstawie informacji w postaci odpowiedzi układu na dane wzbudzenie
20 ZAGADNIENIA IDENTYFIKACJI są matematycznie źle postawione (ill posed) nowe metody obliczeniowe, wprowadzenie nowych fukcjonałów jakości, nowe techniki regularyzacyjne, nowe procedury pomiarowe.




21 Sformułowanie zagadnienia identyfikacji pustki pęknięcia Należy znaleźć liczbę, rodzaj, kształt oraz położenie defektów
22 d y T y T d y u y u J 2 2 ) ( ) ( 2 1 ) ( ) ( 2 1 min x d y u y u J 2 ) ( ) ( 2 1 min x Dla zagadnień statycznych Identyfikacja nieznanych defektów Dla zagadnień dynamicznych T dtd t y u t y u J 2 ), ( ), ( 2 1 min x Dla zagadnień termo-mechanicznych Dla zagadnień własnych n i i i J min x
23 Wektor zmiennych decyzyjnych x = <x 1, x 2,...x i,...x N > x il x i x ir x i R gdzie: x i zmienna decyzyjna reprezentująca: geometrię defektu liczbę defektów parametry materiałowe
24 P 1 P2 P3 kształt brzegu Parametryzacja współrzędne punktów brzegowych P n P n-1 P r x P 1, x,p1,y,p2,x,p2,y,...,pr,x,pr, y,...,pn,x, Pn, y

25 . kształt brzegu współrzędne punktów kontrolnych krzywej NURBS x P 1, x,p1,y,p2,x,p2,y,...,pr,x,pr, y,...,pn,x, Pn, y
26 kształt pustek lub wtrąceń coordinates of center and radius value (circle) coordinates of center, radius values and angle of rotate (ellipse) coordinates of center, and n radius values (NURBS) y r y r y r x y r 3 r 2 r 1 x x x r n x xc, yc, r x x y, r, r, c, c x y x x y, r, r,..., r c, c 1 2 n
27 . kształt pęknięcia coordinates of center, length and angle of rotate y l y 2 l y 1 x x 1 x 2 x x, y, l, c c x x1, y1, x2, y2
28 Optymalizacja topologiczna i F
29 1 Parametryzacja poprzez sterowanie gęstością materiału Areas in which the interpolated surface is below of the surface for minimum values of mass density (or thickness) The interpolated surface generated by control points Control points of the surface The surface for maximum value of mass density (or thickness) The plane for minimum value of mass density (or thickness) The minimum value of design variable (zero) Value of mass density (or thickness) for e-th FE Void 2-D structure e-th FE 8


30
31 Metody optymalizacji
32 Metody optymalizacji (1) Metody programowania matematycznego Metody warunków optymalności Metody gradientowe: - metoda najszybszego spadku, - metoda Newtona i metody quasi-newtonowskie (zmiennej metryki), - metoda gradientów sprzężonych - Analiza wrażliwości (m.in. pochodna topologiczna)
33 Populacyjne metody optymalizacji
34 Metody optymalizacji (2) Metody inteligencji obliczeniowej: - Algorytmy ewolucyjne - Sztuczne systemy immunologiczne - Metody rojowe (rojów cząstek) - Symulowane wyżarzanie






35 Metody obliczeniowe inspirowane biologicznie 1 The basis of the artificial immune systems The basis of the evolutionary algorithms B-cell budding virus T-cell recognition the antigen
36 Idea Metody of evolutionary optymalizacji optimisation inspirowane biologicznie 1 Objective function value Objective function value Artificial immune systems Evolutionary algorithms pathogens Individuals The goal of AIS find the most dangerous pathogen i.e. the global optimum of objective function The goal of EA find the fittest chromosom i.e. the global optimum of objective function

 B-cell receptor min x x x max i i i xi design variable")
37 Idea Metody of evolutionary optymalizacji optimisation inspirowane biologicznie 1 Artificial immune systems floating point representation Evolutionary algorithms floating point representation x1 x1 B-cell= x2 x3 chrom= x2 x3 xn xn min x x x max i i i xi design variable (parameters of B-cell receptor) B-cell receptor min x x x max i i i xi design variable (genes) Chromosome
38 MASTER SEKWENCYJNY ALGORYTM EWOLUCYJNY MASTER MASTER START starting population creation evaluation of fitness function for each chromosome generation of the next population (evolutionary operators and selection) NO stop condition YES STOP
39 MASTER SLAVES RÓWNOLEGŁY ALGORITHM EWOLUCYJNY MASTER MASTER START starting population creation evaluation of fitness evaluation f. of SLAVE fitness function SLAVE for each chromosome for each chromoseme 1 2 SLAVE N-1 SLAVE N generation of the next population (evolutionary operators and selection) NO stop condition YES STOP
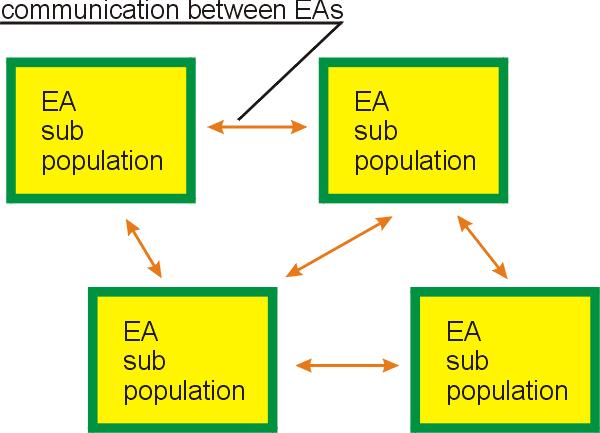

40 Równoległy AE Rozproszony AE
41 Komputerowe wspomaganie optymalizacji konstrukcji (CAOD) (1) START Zbuduj MODEL Wektor zm. decyzyjnych Funkcja celu oraz jej gradient MES, MEB, MRS, MB No Blok algorytmu optymalizacji EXIT? Yes Blok obliczania funkcji celu oraz jej gradientu END
42 Komputerowe wspomaganie optymalizacji konstrukcji (CAOD) (2) Brak jest uniwersalnych programów komputerowych optymalizacji konstrukcji Najczęściej budowane są programy komputerowe dedykowane do pewnej klasy zadań optymalizacji dla wybranych kryteriów oraz sposobu parametryzacji Otrzymywane wyniki są często niesatysfakcjonujące i wymagają odpowiedniej interpretacji Do rozwiązania zagadnienia bezpośredniego najczęściej stosowana jest MES lub MEB Uniwersalne programy komputerowe optymalizacji konstrukcji możliwe są tylko w postaci systemów ekspertowych
43 Optymalizacja konstrukcji prętowych (1) n l A mass n i1 - number of the member - length of the member - cross-sectional areas of members - density of the material l i A i fitness function mass penalty penalty 0 max( ) max( ) eq eq
44 Optymalizacja konstrukcji prętowych (2) - Admissible zone for changing of coordinates of joints additional admissible zone
45 masa kratow nicy Optymalizacja konstrukcji prętowych (3) generacja


46 Optymalizacja kształtu łopatki turbiny Criterion: min Ch - 1st principal stress Constraint: dm o Typical bladed disc model with isolated parameterisation zone
47 Trailing Edge Top view Parametric profile part description 1.0 Pressure Side Leading Edge Parameterisation of compound fillet zone Suction Side Interpolated Cross-section cross-sections number Defined cross-section Defined cross-sections parameterization: Shank/airfoil interface Airfoil H 1-8 y R1 1-8 R2 1-3, 6 Bottom platform, cross-sect.1-3, 6 R Bottom platform, cross-section 4-5, 7-8 x Local coordinate system


48 Chromosome: Ch Ch x,..., x, x,.., x, x R1,..., R1, R2,.., R2, H Process of parameterised FEM model generation





49 FEM Model DOFs
50 Optymalizacja topologiczna Fitness function KD= F U = 1 2 T D KD Constraints: N k 1 V k k fixed 0 1, k 1,, N 0 a x b x c [m] Loading [N] 100 x 100 x 100 Q=4x10 Scheme of loading


51 Comparison results of computation with example of authors: Jorgen Bay Jacobsen, Niels Olhoff, Erik Ronholf, Mechanics of Materials 28(1998), U min =28.28e-10 Nm U min =27.4e-10 Nm E=2e 5 MPa - steel E=0.7e 5 MPa - aluminum Structures after optimization

52 Identyfikacja parametrów kości Model of pelvis consists of two types of bone: cortical bone and trabecular bone
 *100 x uˆ k")

53 Funkcja celu uˆ i ui min F( x) *100 x uˆ k i i Przemieszczenia mierzone za pomocą ESPI

54 Identyfikacja parametrów kości korowej
55 Kierunki rozwoju (1) Identyfikacja i optymalizacja w modelowaniu wieloskalowym

56 Podeście wieloskalowe Nano




57 Identyfikacja w modelowaniu wieloskalowym strojenie modelu RVE Cel znaleźć parametry modelu w skali mikro na podstawie pomiarów eksperymentalnych w skali makro

 jak w układzie")
58 Model dyskretny MES Układ rzeczywisty Jakie parametry materiałowe modelu dają takie same wyniki w punktach pomiarowych (sensor points) jak w układzie rzeczywistym?
59 min Ch 0 J gdzie 0 m IDENTIFIKACJA ˆ J a u uˆ b i i i i j1 j1 m Ch x, x,..., x,... x 1 2 i n min x x x max, i,1,2,.. n i i i x i zmienne decyzyjne parametry materiałowe lub geometryczne w skali mikro u i uˆ i i i ˆ obliczone i zmierzone odksztacenia. i i obliczone i zmierzone przemieszczenia,



60 Identyfikacja mikrostruktury kości
61 Optymalizacja wieloskalowa gdzie 1 2 min J o Ch Ch x, x,..., x,... x i n J 0 funkcja celu opisana w skali makro - chromosom (wektor zmiennych decyzyjnych) x i geny (zmienne decyzyjne) opisujące parametry geometryczne lub materiałowe w skali mikro ograniczenia: J 0, 1,2,.. m x x x, i,1,2,.. n min max i i i J J ( u,, ), 0,1,2,... m

 0 0 Ch x, x,.")
62 Scale: m, cm mm m nm Meso scale: Grains Micro scale: Single grain Nano scale: Molecular/atomic level Macro scale: Structure J J ( u,, ) 0 0 Ch x, x,..., x,... x 1 2 i n


63 Ewolucyjna optymalizacja wieloskalowa Skala makro Skala mikro RVE



64 min J, where J u Ch 0 0 max Ch g, g, g, g, g, g, g, g g 7, g 8 The best solution in the 1st generation The best solution in the last generation DEA parameters: 2 subpopulations 20 chromosomes in each Rank selection Gasuss mutation Simple crossover






65 Optymalizacja klastrów atomowych Najstabilniejsze konfiguracje przestrzenne klastry Al Morse a i M-M N=4, czworościan N=6, ośmiościan N=13, osiemnastościan N=19, podwójny osiemnastościan
 na")

, będące")


66 Minima globalne oraz lokalne (isomery) na przykładzie N=9 Klaster Morse a - min. lokalne E b = eV (isomer), będące jednocześnie minimum globalnym dla klastra Murrella-Mortramma E b =1.764eV Morse min. glob E b = eV; Morse min. lok. E b = eV
67 Kierunki rozwoju (2) Optymalizacja (wielokryterialna) w zagadnieniach pól sprzężonych
![Example Design variable Min value [m] Max value [m]](/docs-images/91/105056759/images/68-0.jpg "Z1, Z2, Z3, Z4 0.01 0.05 Z5 0.0025 0.006 Z6 0.0025 0.008")
68 Example Design variable Min value [m] Max value [m] Z1, Z2, Z3, Z Z Z
69 Results of the optimization (Pareto approach) f 1 - volume f 2 - equivalent stress
70 Results of the optimization (Pareto approach) f 1 heat flux f 2 - equivalent stress
71 Results of the optimization (Pareto approach) f 1 volume f 2 - equivalent stress f 3 heat flux
72 Kierunki rozwoju (3) Optymalizacja i identyfikacja w warunkach niepewności
73 Kierunki rozwoju (4) Rozwój metod optymalizacji topologicznej Rozwój nowych metod optymalizacji wielokryterialnej (np. AE i SSI sprzężone z teorią gier)
74 Sterowanie
75 Sterowanie optymalne (1) Układ sterowany opisany równaniem x f( t, x, u) gdzie u wektor sterujący Ograniczenia: g( u) 0 Rodzaje sterowania optymalnego: A. Sterowanie minimalno-czasowe B. Sterowanie docelowe C. Sterowanie minimalno-całkowe
76 Sterowanie optymalne (2) Przedstawione zagadnienia sterowania optymalnego rozpatrywać można jako szczególny przypadek ogólnego problemu minimalizacji lub maksymalizacji funkcjonału Pontriagina Pbx ( t ) k Funkcja Hamiltona: Ht (, x, p, u) pf gdzie: p wektor sprzężony Zasada maksimum Pontriagina: Jeśli wektor sterujący u jest optymalny, to - gdy minimalizuje P, wtedy hamiltonian H(t,x,p,u) osiąga maksimum, - gdy maksymalizuje P, wtedy hamiltonian H(t,x,p,u) osiąga minimum, względem u w każdej chwili przedziału sterowania.
77 Sterowanie optymalne (3) Metoda programowania dynamicznego badania procesów optymalnych na bazie metod mechaniki Zasada optymalności Bellmana: Optymalna strategia sterowania ma tę własność, że jakiekolwiek byłby stan początkowy i decyzja początkowa, pozostałe decyzje muszą tworzyć strategię optymalną względem stanu powstałego w wyniku pierwszej decyzji. Sterowanie układami holonomicznymi i nieholonomicznymi Układy mechaniczne celowego działania Sterowanie więzami ciała odkształcalnego
78 Sterowanie optymalne (4) Projektowanie strategii i algorytmów sterowania nieliniowego układami mechatronicznymi Prace nad MEMS metody projektowania sterowania dla mikro-elektromechanicznych sensorów Zastosowanie smart materials w mechatronicznych układach sterowania Zastosowanie modeli sztywno/ odkształcalnych do sterowania układami odkształcalnymi i sterowanie drganiami.
79 Sterowanie optymalne (5) Sterowanie modelami humanoidów, modelami ciała ludzkiego Giroskopy MEMS szeroko rozpowszechnione w przemyśle samochodowym, kamerach cyfrowych, układach nawigacyjnych
80 Interdyscyplinarny charakter Sekcji Informatyka Matematyka Optymalizacja i Sterowanie Dyscypliny naukowe: Mechanika Budowa i Eksploatacja M. Automatyka i Robotyka Inżynieria Materiałowa Biocybernetyka i Inż. Biom.

81 RHex robot - superman, biegający, pływający, grający w piłkę kwintesencja modelowania i technik sterowania optymalnego oraz możliwości konstrukcyjnych
SZTUCZNA INTELIGENCJA
 SZTUCZNA INTELIGENCJA WYKŁAD 13. PROBLEMY OPTYMALIZACYJNE Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska PROBLEMY OPTYMALIZACYJNE Optymalizacja poszukiwanie
SZTUCZNA INTELIGENCJA WYKŁAD 13. PROBLEMY OPTYMALIZACYJNE Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska PROBLEMY OPTYMALIZACYJNE Optymalizacja poszukiwanie
Plan. Zakres badań teorii optymalizacji. Teoria optymalizacji. Teoria optymalizacji a badania operacyjne. Badania operacyjne i teoria optymalizacji
 Badania operacyjne i teoria optymalizacji Instytut Informatyki Poznań, 2011/2012 1 2 3 Teoria optymalizacji Teoria optymalizacji a badania operacyjne Teoria optymalizacji zajmuje się badaniem metod optymalizacji
Badania operacyjne i teoria optymalizacji Instytut Informatyki Poznań, 2011/2012 1 2 3 Teoria optymalizacji Teoria optymalizacji a badania operacyjne Teoria optymalizacji zajmuje się badaniem metod optymalizacji
Spis treści 377 379 WSTĘP... 9
 Spis treści 377 379 Spis treści WSTĘP... 9 ZADANIE OPTYMALIZACJI... 9 PRZYKŁAD 1... 9 Założenia... 10 Model matematyczny zadania... 10 PRZYKŁAD 2... 10 PRZYKŁAD 3... 11 OPTYMALIZACJA A POLIOPTYMALIZACJA...
Spis treści 377 379 Spis treści WSTĘP... 9 ZADANIE OPTYMALIZACJI... 9 PRZYKŁAD 1... 9 Założenia... 10 Model matematyczny zadania... 10 PRZYKŁAD 2... 10 PRZYKŁAD 3... 11 OPTYMALIZACJA A POLIOPTYMALIZACJA...
Metody Rozmyte i Algorytmy Ewolucyjne
 mgr inż. Wydział Matematyczno-Przyrodniczy Szkoła Nauk Ścisłych Uniwersytet Kardynała Stefana Wyszyńskiego Podstawy optymalizacji Plan prezentacji 1 Podstawy matematyczne 2 3 Eliminacja ograniczeń Metody
mgr inż. Wydział Matematyczno-Przyrodniczy Szkoła Nauk Ścisłych Uniwersytet Kardynała Stefana Wyszyńskiego Podstawy optymalizacji Plan prezentacji 1 Podstawy matematyczne 2 3 Eliminacja ograniczeń Metody
LABORATORIUM 1: Program Evolutionary Algorithms
 Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny, Politechnika Śląska www.imio.polsl.pl OBLICZENIA EWOLUCYJNE LABORATORIUM 1: Program Evolutionary Algorithms opracował:
Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny, Politechnika Śląska www.imio.polsl.pl OBLICZENIA EWOLUCYJNE LABORATORIUM 1: Program Evolutionary Algorithms opracował:
Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy: Polski Semestr 1 RME-1-103-s Podstawy
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy: Polski Semestr 1 RME-1-103-s Podstawy
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa. Marzec Podstawy teorii optymalizacji Oceanotechnika, II stop., sem.
 Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. II stop., sem. I, Kierunek Oceanotechnika, Spec. Okrętowe Podstawy teorii optymalizacji Wykład 1 M. H. Ghaemi Marzec 2016 Podstawy teorii
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. II stop., sem. I, Kierunek Oceanotechnika, Spec. Okrętowe Podstawy teorii optymalizacji Wykład 1 M. H. Ghaemi Marzec 2016 Podstawy teorii
OPTYMALIZACJA ZBIORNIKA NA GAZ PŁYNNY LPG
 Leon KUKIEŁKA, Krzysztof KUKIEŁKA, Katarzyna GELETA, Łukasz CĄKAŁA OPTYMALIZACJA ZBIORNIKA NA GAZ PŁYNNY LPG Streszczenie Praca dotyczy optymalizacji kształtu zbiornika toroidalnego na gaz LPG. Kryterium
Leon KUKIEŁKA, Krzysztof KUKIEŁKA, Katarzyna GELETA, Łukasz CĄKAŁA OPTYMALIZACJA ZBIORNIKA NA GAZ PŁYNNY LPG Streszczenie Praca dotyczy optymalizacji kształtu zbiornika toroidalnego na gaz LPG. Kryterium
11. 11. OPTYMALIZACJA KONSTRUKCJI
 11. OPTYMALIZACJA KONSTRUKCJI 1 11. 11. OPTYMALIZACJA KONSTRUKCJI 11.1. Wprowadzenie 1. Optymalizacja potocznie i matematycznie 2. Przykład 3. Kryterium optymalizacji 4. Ograniczenia w zadaniach optymalizacji
11. OPTYMALIZACJA KONSTRUKCJI 1 11. 11. OPTYMALIZACJA KONSTRUKCJI 11.1. Wprowadzenie 1. Optymalizacja potocznie i matematycznie 2. Przykład 3. Kryterium optymalizacji 4. Ograniczenia w zadaniach optymalizacji
PEWNE METODY HYBRYDOWE W JEDNOKRYTERIALNEJ OPTYMALIZACJI KONSTRUKCJI SOME HYBRID METHODS FOR SINGLE CRITERIA DESIGN OPTIMIZATION
 STANISŁAW KRENICH PEWNE METODY HYBRYDOWE W JEDNOKRYTERIALNEJ OPTYMALIZACJI KONSTRUKCJI SOME HYBRID METHODS FOR SINGLE CRITERIA DESIGN OPTIMIZATION S t r e s z c z e n i e A b s t r a c t W artykule przedstawiono
STANISŁAW KRENICH PEWNE METODY HYBRYDOWE W JEDNOKRYTERIALNEJ OPTYMALIZACJI KONSTRUKCJI SOME HYBRID METHODS FOR SINGLE CRITERIA DESIGN OPTIMIZATION S t r e s z c z e n i e A b s t r a c t W artykule przedstawiono
LABORATORIUM 4: Algorytmy ewolucyjne cz. 2 wpływ operatorów krzyżowania i mutacji na skuteczność poszukiwań AE
 Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny, Politechnika Śląska www.imio.polsl.pl METODY HEURYSTYCZNE LABORATORIUM 4: Algorytmy ewolucyjne cz. 2 wpływ operatorów krzyżowania
Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny, Politechnika Śląska www.imio.polsl.pl METODY HEURYSTYCZNE LABORATORIUM 4: Algorytmy ewolucyjne cz. 2 wpływ operatorów krzyżowania
Wielokryteriowa optymalizacja liniowa
 Wielokryteriowa optymalizacja liniowa 1. Przy decyzjach złożonych kierujemy się zwykle więcej niż jednym kryterium. Postępowanie w takich sytuacjach nie jest jednoznaczne. Pojawiło się wiele sposobów dochodzenia
Wielokryteriowa optymalizacja liniowa 1. Przy decyzjach złożonych kierujemy się zwykle więcej niż jednym kryterium. Postępowanie w takich sytuacjach nie jest jednoznaczne. Pojawiło się wiele sposobów dochodzenia
CHARAKTERYSTYKA I ZASTOSOWANIA ALGORYTMÓW OPTYMALIZACJI ROZMYTEJ. E. ZIÓŁKOWSKI 1 Wydział Odlewnictwa AGH, ul. Reymonta 23, Kraków
 36/3 Archives of Foundry, Year 004, Volume 4, 3 Archiwum Odlewnictwa, Rok 004, Rocznik 4, Nr 3 PAN Katowice PL ISSN 64-5308 CHARAKTERYSTYKA I ZASTOSOWANIA ALGORYTMÓW OPTYMALIZACJI ROZMYTEJ E. ZIÓŁKOWSKI
36/3 Archives of Foundry, Year 004, Volume 4, 3 Archiwum Odlewnictwa, Rok 004, Rocznik 4, Nr 3 PAN Katowice PL ISSN 64-5308 CHARAKTERYSTYKA I ZASTOSOWANIA ALGORYTMÓW OPTYMALIZACJI ROZMYTEJ E. ZIÓŁKOWSKI
ZASTOSOWANIE METOD OPTYMALIZACJI W DOBORZE CECH GEOMETRYCZNYCH KARBU ODCIĄŻAJĄCEGO
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 43-48, Gliwice 2010 ZASTOSOWANIE METOD OPTYMALIZACJI W DOBORZE CECH GEOMETRYCZNYCH KARBU ODCIĄŻAJĄCEGO TOMASZ CZAPLA, MARIUSZ PAWLAK Katedra Mechaniki Stosowanej,
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 43-48, Gliwice 2010 ZASTOSOWANIE METOD OPTYMALIZACJI W DOBORZE CECH GEOMETRYCZNYCH KARBU ODCIĄŻAJĄCEGO TOMASZ CZAPLA, MARIUSZ PAWLAK Katedra Mechaniki Stosowanej,
ZASTOSOWANIE ZASADY MAKSIMUM PONTRIAGINA DO ZAGADNIENIA
 ZASTOSOWANIE ZASADY MAKSIMUM PONTRIAGINA DO ZAGADNIENIA DYNAMICZNYCH LOKAT KAPITAŁOWYCH Krzysztof Gąsior Uniwersytet Rzeszowski Streszczenie Celem referatu jest zaprezentowanie praktycznego zastosowania
ZASTOSOWANIE ZASADY MAKSIMUM PONTRIAGINA DO ZAGADNIENIA DYNAMICZNYCH LOKAT KAPITAŁOWYCH Krzysztof Gąsior Uniwersytet Rzeszowski Streszczenie Celem referatu jest zaprezentowanie praktycznego zastosowania
Spis treści Przedmowa
 Spis treści Przedmowa 1. Wprowadzenie do problematyki konstruowania - Marek Dietrich (p. 1.1, 1.2), Włodzimierz Ozimowski (p. 1.3 -i-1.7), Jacek Stupnicki (p. l.8) 1.1. Proces konstruowania 1.2. Kryteria
Spis treści Przedmowa 1. Wprowadzenie do problematyki konstruowania - Marek Dietrich (p. 1.1, 1.2), Włodzimierz Ozimowski (p. 1.3 -i-1.7), Jacek Stupnicki (p. l.8) 1.1. Proces konstruowania 1.2. Kryteria
Kierownik Katedry: Prof. dr hab. inż. Tadeusz BURCZYŃSKI
 Kierownik Katedry: Prof. dr hab. inż. Tadeusz BURCZYŃSKI Zakład Inteligentnych Systemów Obliczeniowych RMT4-3 Kierownik Zakładu: Prof. dr hab. inż. Tadeusz BURCZYŃSKI Zakład Metod Numerycznych w Termomechanice
Kierownik Katedry: Prof. dr hab. inż. Tadeusz BURCZYŃSKI Zakład Inteligentnych Systemów Obliczeniowych RMT4-3 Kierownik Zakładu: Prof. dr hab. inż. Tadeusz BURCZYŃSKI Zakład Metod Numerycznych w Termomechanice
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Programowanie liniowe. Tadeusz Trzaskalik
 Programowanie liniowe Tadeusz Trzaskalik .. Wprowadzenie Słowa kluczowe Model matematyczny Cel, środki, ograniczenia Funkcja celu funkcja kryterium Zmienne decyzyjne Model optymalizacyjny Układ warunków
Programowanie liniowe Tadeusz Trzaskalik .. Wprowadzenie Słowa kluczowe Model matematyczny Cel, środki, ograniczenia Funkcja celu funkcja kryterium Zmienne decyzyjne Model optymalizacyjny Układ warunków
S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE
 KATEDRA SYSTEMÓW DECYZYJNYCH POLITECHNIKA GDA N SKA S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE prof. dr hab. inz. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych Wydział Elektroniki Telekomunikacji
KATEDRA SYSTEMÓW DECYZYJNYCH POLITECHNIKA GDA N SKA S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE prof. dr hab. inz. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych Wydział Elektroniki Telekomunikacji
Spis treści. Przedmowa 11
 Podstawy konstrukcji maszyn. T. 1 / autorzy: Marek Dietrich, Stanisław Kocańda, Bohdan Korytkowski, Włodzimierz Ozimowski, Jacek Stupnicki, Tadeusz Szopa ; pod redakcją Marka Dietricha. wyd. 3, 2 dodr.
Podstawy konstrukcji maszyn. T. 1 / autorzy: Marek Dietrich, Stanisław Kocańda, Bohdan Korytkowski, Włodzimierz Ozimowski, Jacek Stupnicki, Tadeusz Szopa ; pod redakcją Marka Dietricha. wyd. 3, 2 dodr.
Sterowanie optymalne
 Sterowanie optymalne Sterowanie Procesami Ciągłymi 2017 Optymalizacja statyczna funkcji Funkcja celu/kryterialna/kosztów Ograniczenie Q(x) min x x = arg min Q(x) x x X, gdzie X zbiór rozwiązań dopuszczalnych
Sterowanie optymalne Sterowanie Procesami Ciągłymi 2017 Optymalizacja statyczna funkcji Funkcja celu/kryterialna/kosztów Ograniczenie Q(x) min x x = arg min Q(x) x x X, gdzie X zbiór rozwiązań dopuszczalnych
IDENTYFIKACJA I ANALIZA PARAMETRÓW GEOMETRYCZNYCH I MECHANICZNYCH KOŚCI MIEDNICZNEJ CZŁOWIEKA
 POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE Nr 1651 Antoni JOHN SUB Gottingen 7 217 780 458 2005 A 3012 IDENTYFIKACJA I ANALIZA PARAMETRÓW GEOMETRYCZNYCH I MECHANICZNYCH KOŚCI MIEDNICZNEJ CZŁOWIEKA Gliwice 2004
POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE Nr 1651 Antoni JOHN SUB Gottingen 7 217 780 458 2005 A 3012 IDENTYFIKACJA I ANALIZA PARAMETRÓW GEOMETRYCZNYCH I MECHANICZNYCH KOŚCI MIEDNICZNEJ CZŁOWIEKA Gliwice 2004
BADANIA OPERACYJNE i teoria optymalizacji. Prowadzący: dr Tomasz Pisula Katedra Metod Ilościowych
 BADANIA OPERACYJNE i teoria optymalizacji Prowadzący: dr Tomasz Pisula Katedra Metod Ilościowych e-mail: tpisula@prz.edu.pl 1 Literatura podstawowa wykorzystywana podczas zajęć wykładowych: 1. Gajda J.,
BADANIA OPERACYJNE i teoria optymalizacji Prowadzący: dr Tomasz Pisula Katedra Metod Ilościowych e-mail: tpisula@prz.edu.pl 1 Literatura podstawowa wykorzystywana podczas zajęć wykładowych: 1. Gajda J.,
Komputerowe wspomaganie projektowania- CAT-01
 Komputerowe wspomaganie projektowania- CAT-01 Celem szkolenia jest praktyczne zapoznanie uczestników z podstawami metodyki projektowania 3D w programie CATIA V5 Interfejs użytkownika Modelowanie parametryczne
Komputerowe wspomaganie projektowania- CAT-01 Celem szkolenia jest praktyczne zapoznanie uczestników z podstawami metodyki projektowania 3D w programie CATIA V5 Interfejs użytkownika Modelowanie parametryczne
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy:
Programowanie nieliniowe. Badania operacyjne Wykład 3 Metoda Lagrange a
 Programowanie nieliniowe Badania operacyjne Wykład 3 Metoda Lagrange a Plan wykładu Przykład problemu z nieliniową funkcją celu Sformułowanie problemu programowania matematycznego Podstawowe definicje
Programowanie nieliniowe Badania operacyjne Wykład 3 Metoda Lagrange a Plan wykładu Przykład problemu z nieliniową funkcją celu Sformułowanie problemu programowania matematycznego Podstawowe definicje
Optymalizacja konstrukcji
 Optymalizacja konstrukcji Kształtowanie konstrukcyjne: nadanie właściwych cech konstrukcyjnych przeszłej maszynie określenie z jakiego punktu widzenia (wg jakiego kryterium oceny) będą oceniane alternatywne
Optymalizacja konstrukcji Kształtowanie konstrukcyjne: nadanie właściwych cech konstrukcyjnych przeszłej maszynie określenie z jakiego punktu widzenia (wg jakiego kryterium oceny) będą oceniane alternatywne
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Definicja problemu programowania matematycznego
 Definicja problemu programowania matematycznego minimalizacja lub maksymalizacja funkcji min (max) f(x) gdzie: x 1 x R n x 2, czyli: x = [ ] x n przy ograniczeniach (w skrócie: p.o.) p.o. g i (x) = b i
Definicja problemu programowania matematycznego minimalizacja lub maksymalizacja funkcji min (max) f(x) gdzie: x 1 x R n x 2, czyli: x = [ ] x n przy ograniczeniach (w skrócie: p.o.) p.o. g i (x) = b i
LABORATORIUM 3: Wpływ operatorów krzyżowania na skuteczność poszukiwań AE
 Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny, Politechnika Śląska www.imio.polsl.pl OBLICZENIA EWOLUCYJNE LABORATORIUM 3: Wpływ operatorów krzyżowania na skuteczność
Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny, Politechnika Śląska www.imio.polsl.pl OBLICZENIA EWOLUCYJNE LABORATORIUM 3: Wpływ operatorów krzyżowania na skuteczność
OPTYMALNA ALOKACJA OBIEKTÓW Z WYKORZYSTANIEM ALGORYTMÓW EWOLUCYJNYCH
 Stanisław KRENICH 1 Alokacja obiektów Optymalizacja Algorytmy ewolucyjne OPTYMALNA ALOKACJA OBIEKTÓW Z WYKORZYSTANIEM ALGORYTMÓW EWOLUCYJNYCH W artykule opisano metodę rozwiązywani zagadnienia optymalnej
Stanisław KRENICH 1 Alokacja obiektów Optymalizacja Algorytmy ewolucyjne OPTYMALNA ALOKACJA OBIEKTÓW Z WYKORZYSTANIEM ALGORYTMÓW EWOLUCYJNYCH W artykule opisano metodę rozwiązywani zagadnienia optymalnej
2.1.M.06: Modelowanie i wspomaganie komputerowe w inżynierii powierzchni
 2nd Workshop on Foresight of surface properties formation leading technologies of engineering materials and biomaterials in Białka Tatrzańska, Poland 29th-30th November 2009 1 Panel nt. Procesy wytwarzania
2nd Workshop on Foresight of surface properties formation leading technologies of engineering materials and biomaterials in Białka Tatrzańska, Poland 29th-30th November 2009 1 Panel nt. Procesy wytwarzania
Definicja pochodnej cząstkowej
 1 z 8 gdzie punkt wewnętrzny Definicja pochodnej cząstkowej JeŜeli iloraz ma granicę dla to granicę tę nazywamy pochodną cząstkową funkcji względem w punkcie. Oznaczenia: Pochodną cząstkową funkcji względem
1 z 8 gdzie punkt wewnętrzny Definicja pochodnej cząstkowej JeŜeli iloraz ma granicę dla to granicę tę nazywamy pochodną cząstkową funkcji względem w punkcie. Oznaczenia: Pochodną cząstkową funkcji względem
Metody Optymalizacji: Przeszukiwanie z listą tabu
 Metody Optymalizacji: Przeszukiwanie z listą tabu Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje: wtorek
Metody Optymalizacji: Przeszukiwanie z listą tabu Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje: wtorek
Tomasz M. Gwizdałła 2012/13
 METODY METODY OPTYMALIZACJI OPTYMALIZACJI Tomasz M. Gwizdałła 2012/13 Informacje wstępne Tomasz Gwizdałła Katedra Fizyki Ciała Stałego UŁ Pomorska 149/153, p.523b tel. 6355709 tomgwizd@uni.lodz.pl http://www.wfis.uni.lodz.pl/staff/tgwizdalla
METODY METODY OPTYMALIZACJI OPTYMALIZACJI Tomasz M. Gwizdałła 2012/13 Informacje wstępne Tomasz Gwizdałła Katedra Fizyki Ciała Stałego UŁ Pomorska 149/153, p.523b tel. 6355709 tomgwizd@uni.lodz.pl http://www.wfis.uni.lodz.pl/staff/tgwizdalla
Z-ZIP2-303z Zagadnienia optymalizacji Problems of optimization
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 0/03 Z-ZIP-303z Zagadnienia optymalizacji Problems of optimization A. USYTUOWANIE
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 0/03 Z-ZIP-303z Zagadnienia optymalizacji Problems of optimization A. USYTUOWANIE
Algorytmy ewolucyjne 1
 Algorytmy ewolucyjne 1 2 Zasady zaliczenia przedmiotu Prowadzący (wykład i pracownie specjalistyczną): Wojciech Kwedlo, pokój 205. Konsultacje dla studentów studiów dziennych: poniedziałek,środa, godz
Algorytmy ewolucyjne 1 2 Zasady zaliczenia przedmiotu Prowadzący (wykład i pracownie specjalistyczną): Wojciech Kwedlo, pokój 205. Konsultacje dla studentów studiów dziennych: poniedziałek,środa, godz
Wydział Inżynierii Lądowej i Środowiska Katedra Mechaniki Budowli Kierownik Katedry prof. dr hab. inż. Paweł Kłosowski
 Wydział Inżynierii Lądowej i Środowiska Kierownik Katedry prof. dr hab. inż. Paweł Kłosowski Laboratorium Mechaniki Konstrukcji i Materiałów Kierownik Laboratorium dr hab. inż. Piotr Iwicki, prof. nadzw.
Wydział Inżynierii Lądowej i Środowiska Kierownik Katedry prof. dr hab. inż. Paweł Kłosowski Laboratorium Mechaniki Konstrukcji i Materiałów Kierownik Laboratorium dr hab. inż. Piotr Iwicki, prof. nadzw.
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH
 AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH kierunek Automatyka i Robotyka Studia II stopnia specjalności Automatyka Dr inż. Zbigniew Ogonowski Instytut Automatyki, Politechnika Śląska Plan wykładu pojęcia
AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH kierunek Automatyka i Robotyka Studia II stopnia specjalności Automatyka Dr inż. Zbigniew Ogonowski Instytut Automatyki, Politechnika Śląska Plan wykładu pojęcia
Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów Prof. dr hab. inż. Janusz Frączek Instytut
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów Prof. dr hab. inż. Janusz Frączek Instytut
Modelowanie w projektowaniu maszyn i procesów cz.5
 Modelowanie w projektowaniu maszyn i procesów cz.5 Metoda Elementów Skończonych i analizy optymalizacyjne w środowisku CAD Dr hab inż. Piotr Pawełko p. 141 Piotr.Pawełko@zut.edu.pl www.piopawelko.zut.edu.pl
Modelowanie w projektowaniu maszyn i procesów cz.5 Metoda Elementów Skończonych i analizy optymalizacyjne w środowisku CAD Dr hab inż. Piotr Pawełko p. 141 Piotr.Pawełko@zut.edu.pl www.piopawelko.zut.edu.pl
MODELOWANIE ZA POMOCĄ MES Analiza statyczna ustrojów powierzchniowych
 MODELOWANIE ZA POMOCĄ MES Analiza statyczna ustrojów powierzchniowych PODSTAWY KOMPUTEROWEGO MODELOWANIA USTROJÓW POWIERZCHNIOWYCH Budownictwo, studia I stopnia, semestr VI przedmiot fakultatywny rok akademicki
MODELOWANIE ZA POMOCĄ MES Analiza statyczna ustrojów powierzchniowych PODSTAWY KOMPUTEROWEGO MODELOWANIA USTROJÓW POWIERZCHNIOWYCH Budownictwo, studia I stopnia, semestr VI przedmiot fakultatywny rok akademicki
Kształcenie w Szkole Doktorskiej Politechniki Białostockiej realizowane będzie według następującego programu:
 Kształcenie w Szkole Doktorskiej Politechniki Białostockiej realizowane będzie według następującego programu: Semestr 1 2 3 4 Rodzaj Forma Forma Liczba zajęć zajęć zaliczeń godzin Szkolenie biblioteczne
Kształcenie w Szkole Doktorskiej Politechniki Białostockiej realizowane będzie według następującego programu: Semestr 1 2 3 4 Rodzaj Forma Forma Liczba zajęć zajęć zaliczeń godzin Szkolenie biblioteczne
Optymalizacja konstrukcji
 Dariusz Skibicki dariusz.skibickiatutp.edu.pl Wydział Inżynierii Mechanicznej Uniwersytet Technologiczno Przyrodniczy im. Jana i Jędrzeja Śniadeckich w Bydgoszczy Optymalizacja konstrukcji Plan wykładu
Dariusz Skibicki dariusz.skibickiatutp.edu.pl Wydział Inżynierii Mechanicznej Uniwersytet Technologiczno Przyrodniczy im. Jana i Jędrzeja Śniadeckich w Bydgoszczy Optymalizacja konstrukcji Plan wykładu
METODY OPTYMALIZACJI. Tomasz M. Gwizdałła 2018/19
 METODY OPTYMALIZACJI Tomasz M. Gwizdałła 2018/19 Informacje wstępne Tomasz Gwizdałła Katedra Fizyki Ciała Stałego UŁ Pomorska 149/153, p.524b tel. 6355709 tomgwizd@uni.lodz.pl http://www.wfis.uni.lodz.pl/staff/tgwizdalla
METODY OPTYMALIZACJI Tomasz M. Gwizdałła 2018/19 Informacje wstępne Tomasz Gwizdałła Katedra Fizyki Ciała Stałego UŁ Pomorska 149/153, p.524b tel. 6355709 tomgwizd@uni.lodz.pl http://www.wfis.uni.lodz.pl/staff/tgwizdalla
INSTRUKCJA DO ĆWICZENIA NR 1
 L01 ---2014/10/17 ---10:52---page1---#1 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 1 PRZEDMIOT TEMAT Wybrane zagadnienia z optymalizacji elementów
L01 ---2014/10/17 ---10:52---page1---#1 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 1 PRZEDMIOT TEMAT Wybrane zagadnienia z optymalizacji elementów
W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora.
 1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach. Krzysztof Żurek Gdańsk,
 Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach Krzysztof Żurek Gdańsk, 2015-06-10 Plan Prezentacji 1. Manipulatory. 2. Wprowadzenie do Metody Elementów Skończonych (MES).
Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach Krzysztof Żurek Gdańsk, 2015-06-10 Plan Prezentacji 1. Manipulatory. 2. Wprowadzenie do Metody Elementów Skończonych (MES).
ZAGADNIENIA SPECJALNOŚCIOWE
 (ARK) Komputerowe sieci sterowania 1.Zaawansowane metody wyznaczania parametrów regulatorów 2.Mechanizmy innowacyjne. 3.Sieci neuronowe w modelowaniu obiektów dynamicznych. 4.Zasady projektowania i zastosowania
(ARK) Komputerowe sieci sterowania 1.Zaawansowane metody wyznaczania parametrów regulatorów 2.Mechanizmy innowacyjne. 3.Sieci neuronowe w modelowaniu obiektów dynamicznych. 4.Zasady projektowania i zastosowania
Lista przedmiotów prowadzonych przez pracowników Zakładu Sieci i Systemów Elektroenergetycznych
 Lista przedmiotów prowadzonych przez pracowników Zakładu Sieci i Systemów Elektroenergetycznych Informatyka w elektroenergetyce 1DE1703 W15, L30 Projektowanie komputerowe i systemy informacji przestrzennej
Lista przedmiotów prowadzonych przez pracowników Zakładu Sieci i Systemów Elektroenergetycznych Informatyka w elektroenergetyce 1DE1703 W15, L30 Projektowanie komputerowe i systemy informacji przestrzennej
Field of study: Computational Engineering Study level: First-cycle studies Form and type of study: Full-time studies. Auditorium classes.
 Faculty of: Metals and Industrial Computer Science Field of study: Computational Study level: First-cycle studies Form and type of study: Full-time studies Annual: 2014/2015 Lecture language: Polish Project
Faculty of: Metals and Industrial Computer Science Field of study: Computational Study level: First-cycle studies Form and type of study: Full-time studies Annual: 2014/2015 Lecture language: Polish Project
Problemy z ograniczeniami
 Problemy z ograniczeniami 1 2 Dlaczego zadania z ograniczeniami Wiele praktycznych problemów to problemy z ograniczeniami. Problemy trudne obliczeniowo (np-trudne) to prawie zawsze problemy z ograniczeniami.
Problemy z ograniczeniami 1 2 Dlaczego zadania z ograniczeniami Wiele praktycznych problemów to problemy z ograniczeniami. Problemy trudne obliczeniowo (np-trudne) to prawie zawsze problemy z ograniczeniami.
Zadania 1. Czas pracy przypadający na jednostkę wyrobu (w godz.) M 1. Wyroby
 M 1. Wyroby") Zadania 1 Przedsiębiorstwo wytwarza cztery rodzaje wyrobów: A, B, C, D, które są obrabiane na dwóch maszynach M 1 i M 2. Czas pracy maszyn przypadający na obróbkę jednostki poszczególnych wyrobów podany
Zadania 1 Przedsiębiorstwo wytwarza cztery rodzaje wyrobów: A, B, C, D, które są obrabiane na dwóch maszynach M 1 i M 2. Czas pracy maszyn przypadający na obróbkę jednostki poszczególnych wyrobów podany
Elementy Modelowania Matematycznego
 Elementy Modelowania Matematycznego Wykład 6 Metoda simpleks Spis treści Wstęp Zadanie programowania liniowego Wstęp Omówimy algorytm simpleksowy, inaczej metodę simpleks(ów). Jest to stosowana w matematyce
Elementy Modelowania Matematycznego Wykład 6 Metoda simpleks Spis treści Wstęp Zadanie programowania liniowego Wstęp Omówimy algorytm simpleksowy, inaczej metodę simpleks(ów). Jest to stosowana w matematyce
T2A_W01 T2A_W01 T2A_W02 3 SI_W03 Posiada szeroką wiedzę w zakresie teorii grafów T2A_W01
 Efekty dla studiów drugiego stopnia profil ogólnoakademicki, na kierunku Informatyka w języku polskim, na specjalnościach Metody sztucznej inteligencji oraz Projektowanie systemów CAD/CAM, na Wydziale
Efekty dla studiów drugiego stopnia profil ogólnoakademicki, na kierunku Informatyka w języku polskim, na specjalnościach Metody sztucznej inteligencji oraz Projektowanie systemów CAD/CAM, na Wydziale
Nazwa przedmiotu Wymiar ECTS blok I II III
 ólne dla wszyst. Zjawiska fizyczne w procesach wytwarzania W:30 L:15 3 fizyka 45 C:30 2 nietechniczne 30 W:15 P:15 2 HES 30 Podstawy matematyczne MES W:15 L:15 2 matematyka 30 Planowanie eksperymentu W:15
ólne dla wszyst. Zjawiska fizyczne w procesach wytwarzania W:30 L:15 3 fizyka 45 C:30 2 nietechniczne 30 W:15 P:15 2 HES 30 Podstawy matematyczne MES W:15 L:15 2 matematyka 30 Planowanie eksperymentu W:15
Elementy Modelowania Matematycznego Wykład 7 Programowanie nieliniowe i całkowitoliczbowe
 Spis treści Elementy Modelowania Matematycznego Wykład 7 i całkowitoliczbowe Romuald Kotowski Katedra Informatyki Stosowanej PJWSTK 2009 Spis treści Spis treści 1 Wstęp 2 3 Spis treści Spis treści 1 Wstęp
Spis treści Elementy Modelowania Matematycznego Wykład 7 i całkowitoliczbowe Romuald Kotowski Katedra Informatyki Stosowanej PJWSTK 2009 Spis treści Spis treści 1 Wstęp 2 3 Spis treści Spis treści 1 Wstęp
Metody Numeryczne Optymalizacja. Wojciech Szewczuk
 Metody Numeryczne Optymalizacja Optymalizacja Definicja 1 Przez optymalizację będziemy rozumieć szukanie minimów lub maksimów funkcji. Optymalizacja Definicja 2 Optymalizacja lub programowanie matematyczne
Metody Numeryczne Optymalizacja Optymalizacja Definicja 1 Przez optymalizację będziemy rozumieć szukanie minimów lub maksimów funkcji. Optymalizacja Definicja 2 Optymalizacja lub programowanie matematyczne
Podstawy Sztucznej Inteligencji (PSZT)
") Podstawy Sztucznej Inteligencji (PSZT) Paweł Wawrzyński Uczenie maszynowe Sztuczne sieci neuronowe Plan na dziś Uczenie maszynowe Problem aproksymacji funkcji Sieci neuronowe PSZT, zima 2013, wykład 12
Podstawy Sztucznej Inteligencji (PSZT) Paweł Wawrzyński Uczenie maszynowe Sztuczne sieci neuronowe Plan na dziś Uczenie maszynowe Problem aproksymacji funkcji Sieci neuronowe PSZT, zima 2013, wykład 12
Spis treści. Wstęp 13. Część I. UKŁADY REDUKCJI DRGAŃ Wykaz oznaczeń 18. Literatura Wprowadzenie do części I 22
 Spis treści Wstęp 13 Literatura - 15 Część I. UKŁADY REDUKCJI DRGAŃ - 17 Wykaz oznaczeń 18 1. Wprowadzenie do części I 22 2. Teoretyczne podstawy opisu i analizy układów wibroizolacji maszyn 30 2.1. Rodzaje
Spis treści Wstęp 13 Literatura - 15 Część I. UKŁADY REDUKCJI DRGAŃ - 17 Wykaz oznaczeń 18 1. Wprowadzenie do części I 22 2. Teoretyczne podstawy opisu i analizy układów wibroizolacji maszyn 30 2.1. Rodzaje
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016 Kierunek studiów: Mechanika i Budowa Maszyn
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016 Kierunek studiów: Mechanika i Budowa Maszyn
ALGORYTMY EWOLUCYJNE W OPTYMALIZACJI JEDNOKRYTERIALNEJ
 ALGORYTMY EWOLUCYJNE W OPTYMALIZACJI JEDNOKRYTERIALNEJ Zalety: nie wprowadzają żadnych ograniczeń na sformułowanie problemu optymalizacyjnego. Funkcja celu może być wielowartościowa i nieciągła, obszar
ALGORYTMY EWOLUCYJNE W OPTYMALIZACJI JEDNOKRYTERIALNEJ Zalety: nie wprowadzają żadnych ograniczeń na sformułowanie problemu optymalizacyjnego. Funkcja celu może być wielowartościowa i nieciągła, obszar
Programowanie liniowe
 Badania operacyjne Problem Model matematyczny Metoda rozwiązania Znaleźć optymalny program produkcji. Zmaksymalizować 1 +3 2 2 3 (1) Przy ograniczeniach 3 1 2 +2 3 7 (2) 2 1 +4 2 12 (3) 4 1 +3 2 +8 3 10
Badania operacyjne Problem Model matematyczny Metoda rozwiązania Znaleźć optymalny program produkcji. Zmaksymalizować 1 +3 2 2 3 (1) Przy ograniczeniach 3 1 2 +2 3 7 (2) 2 1 +4 2 12 (3) 4 1 +3 2 +8 3 10
WYKORZYSTANIE METOD OPTYMALIZACJI DO ESTYMACJI ZASTĘPCZYCH WŁASNOŚCI MATERIAŁOWYCH UZWOJENIA MASZYNY ELEKTRYCZNEJ
 MODELOWANIE INŻYNIERSKIE ISNN 1896-771X 3, s. 71-76, Gliwice 006 WYKORZYSTANIE METOD OPTYMALIZACJI DO ESTYMACJI ZASTĘPCZYCH WŁASNOŚCI MATERIAŁOWYCH UZWOJENIA MASZYNY ELEKTRYCZNEJ TOMASZ CZAPLA MARIUSZ
MODELOWANIE INŻYNIERSKIE ISNN 1896-771X 3, s. 71-76, Gliwice 006 WYKORZYSTANIE METOD OPTYMALIZACJI DO ESTYMACJI ZASTĘPCZYCH WŁASNOŚCI MATERIAŁOWYCH UZWOJENIA MASZYNY ELEKTRYCZNEJ TOMASZ CZAPLA MARIUSZ
Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne
 Wydział: Matematyki Stosowanej Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne Specjalność: Matematyka finansowa Rocznik: 2014/2015 Język wykładowy: Polski Semestr
Wydział: Matematyki Stosowanej Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne Specjalność: Matematyka finansowa Rocznik: 2014/2015 Język wykładowy: Polski Semestr
Krzysztof Trajkowski. Przegląd pakietów do optymalizacji liniowej
 Krzysztof Trajkowski Przegląd pakietów do optymalizacji liniowej 1. Wprowadzenie Niniejsze opracowanie dotyczy opisu funkcji solvelp(linprog) i lp(lpsolve) za pomocą których możemy rozwiązywać zadania
Krzysztof Trajkowski Przegląd pakietów do optymalizacji liniowej 1. Wprowadzenie Niniejsze opracowanie dotyczy opisu funkcji solvelp(linprog) i lp(lpsolve) za pomocą których możemy rozwiązywać zadania
Elementy Modelowania Matematycznego
 Elementy Modelowania Matematycznego Wykład 8 Programowanie nieliniowe Spis treści Programowanie nieliniowe Zadanie programowania nieliniowego Zadanie programowania nieliniowego jest identyczne jak dla
Elementy Modelowania Matematycznego Wykład 8 Programowanie nieliniowe Spis treści Programowanie nieliniowe Zadanie programowania nieliniowego Zadanie programowania nieliniowego jest identyczne jak dla
doc. dr Beata Pułska-Turyna Zarządzanie B506 mail: mgr Piotr J. Gadecki Zakład Badań Operacyjnych Zarządzania B 505.
 doc. dr Beata Pułska-Turyna Zakład Badań Operacyjnych Zarządzanie B506 mail: turynab@wz.uw.edu.pl mgr Piotr J. Gadecki Zakład Badań Operacyjnych Zarządzania B 505. Tel.: (22)55 34 144 Mail: student@pgadecki.pl
doc. dr Beata Pułska-Turyna Zakład Badań Operacyjnych Zarządzanie B506 mail: turynab@wz.uw.edu.pl mgr Piotr J. Gadecki Zakład Badań Operacyjnych Zarządzania B 505. Tel.: (22)55 34 144 Mail: student@pgadecki.pl
Algorytmy ewolucyjne
 Algorytmy ewolucyjne Dr inż. Michał Bereta p. 144 / 10, Instytut Modelowania Komputerowego mbereta@pk.edu.pl beretam@torus.uck.pk.edu.pl www.michalbereta.pl Problemy świata rzeczywistego często wymagają
Algorytmy ewolucyjne Dr inż. Michał Bereta p. 144 / 10, Instytut Modelowania Komputerowego mbereta@pk.edu.pl beretam@torus.uck.pk.edu.pl www.michalbereta.pl Problemy świata rzeczywistego często wymagają
Optymalizacja ciągła
 Optymalizacja ciągła 0. Wprowadzenie Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.02.2019 1 / 11 Kontakt wojciech.kotlowski@cs.put.poznan.pl http://www.cs.put.poznan.pl/wkotlowski/mp/
Optymalizacja ciągła 0. Wprowadzenie Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.02.2019 1 / 11 Kontakt wojciech.kotlowski@cs.put.poznan.pl http://www.cs.put.poznan.pl/wkotlowski/mp/
Modele i narzędzia optymalizacji w systemach informatycznych zarządzania
 Politechnika Poznańska Modele i narzędzia optymalizacji w systemach informatycznych zarządzania Joanna Józefowska POZNAŃ 2010/11 Spis treści Rozdział 1. Metoda programowania dynamicznego........... 5
Politechnika Poznańska Modele i narzędzia optymalizacji w systemach informatycznych zarządzania Joanna Józefowska POZNAŃ 2010/11 Spis treści Rozdział 1. Metoda programowania dynamicznego........... 5
Katedra Systemów Decyzyjnych. Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl
 Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne. laboratoryjne projektowe.
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 017/018 Język wykładowy: Polski Semestr 1 Fizyka
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 017/018 Język wykładowy: Polski Semestr 1 Fizyka
Standardy kształcenia dla kierunku studiów: Automatyka i robotyka A. STUDIA PIERWSZEGO STOPNIA
 Załącznik nr 9 Standardy kształcenia dla kierunku studiów: Automatyka i robotyka A. STUDIA PIERWSZEGO STOPNIA I. WYMAGANIA OGÓLNE Studia pierwszego stopnia trwają nie krócej niŝ 7 semestrów. Liczba godzin
Załącznik nr 9 Standardy kształcenia dla kierunku studiów: Automatyka i robotyka A. STUDIA PIERWSZEGO STOPNIA I. WYMAGANIA OGÓLNE Studia pierwszego stopnia trwają nie krócej niŝ 7 semestrów. Liczba godzin
Oferta badawcza Politechniki Gdańskiej dla przedsiębiorstw
 KATEDRA AUTOMATYKI kierownik katedry: dr hab. inż. Kazimierz Kosmowski, prof. nadzw. PG tel.: 058 347-24-39 e-mail: kazkos@ely.pg.gda.pl adres www: http://www.ely.pg.gda.pl/kaut/ Systemy sterowania w obiektach
KATEDRA AUTOMATYKI kierownik katedry: dr hab. inż. Kazimierz Kosmowski, prof. nadzw. PG tel.: 058 347-24-39 e-mail: kazkos@ely.pg.gda.pl adres www: http://www.ely.pg.gda.pl/kaut/ Systemy sterowania w obiektach
Jacek Skorupski pok. 251 tel konsultacje: poniedziałek , sobota zjazdowa
 Jacek Skorupski pok. 251 tel. 234-7339 jsk@wt.pw.edu.pl http://skorupski.waw.pl/mmt prezentacje ogłoszenia konsultacje: poniedziałek 16 15-18, sobota zjazdowa 9 40-10 25 Udział w zajęciach Kontrola wyników
Jacek Skorupski pok. 251 tel. 234-7339 jsk@wt.pw.edu.pl http://skorupski.waw.pl/mmt prezentacje ogłoszenia konsultacje: poniedziałek 16 15-18, sobota zjazdowa 9 40-10 25 Udział w zajęciach Kontrola wyników
Obliczenia ewolucyjne - plan wykładu
 Obliczenia ewolucyjne - plan wykładu Wprowadzenie Algorytmy genetyczne Programowanie genetyczne Programowanie ewolucyjne Strategie ewolucyjne Inne modele obliczeń ewolucyjnych Podsumowanie Ewolucja Ewolucja
Obliczenia ewolucyjne - plan wykładu Wprowadzenie Algorytmy genetyczne Programowanie genetyczne Programowanie ewolucyjne Strategie ewolucyjne Inne modele obliczeń ewolucyjnych Podsumowanie Ewolucja Ewolucja
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne
 Wydział: Matematyki Stosowanej Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne Specjalność: Matematyka w informatyce Rocznik: 2013/2014 Język wykładowy: Polski
Wydział: Matematyki Stosowanej Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne Specjalność: Matematyka w informatyce Rocznik: 2013/2014 Język wykładowy: Polski
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
INSTRUKCJA DO ĆWICZENIA NR 4
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 4 PRZEDMIOT TEMAT Wybrane zagadnienia z optymalizacji elementów konstrukcji Zastosowanie optymalizacji
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 4 PRZEDMIOT TEMAT Wybrane zagadnienia z optymalizacji elementów konstrukcji Zastosowanie optymalizacji
Wymiar godzin Pkt Kod Nazwa przedmiotu Egz.
 PLAN STUDIÓW STACJONARNYCH I-go STOPNIA (inżynierskich) NA WYDZIALE ELETROTECHNII, AUTOMATYI I INFORMATYI na kierunku AUTOMATYA I ROBOTYA Obowiązuje dla 1-go roku studiów w roku akademickim 2015/2016 I
PLAN STUDIÓW STACJONARNYCH I-go STOPNIA (inżynierskich) NA WYDZIALE ELETROTECHNII, AUTOMATYI I INFORMATYI na kierunku AUTOMATYA I ROBOTYA Obowiązuje dla 1-go roku studiów w roku akademickim 2015/2016 I
Kierunek:Informatyka- - inż., rok I specjalność: Grafika komputerowa
 :Informatyka- - inż., rok I specjalność: Grafika komputerowa Rok akademicki 018/019 Metody uczenia się i studiowania. 1 Podstawy prawne. 1 Podstawy ekonomii. 1 Matematyka dyskretna. 1 30 Wprowadzenie do
:Informatyka- - inż., rok I specjalność: Grafika komputerowa Rok akademicki 018/019 Metody uczenia się i studiowania. 1 Podstawy prawne. 1 Podstawy ekonomii. 1 Matematyka dyskretna. 1 30 Wprowadzenie do
Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne
 Wydział: Matematyki Stosowanej Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne Specjalność: Matematyka ubezpieczeniowa Rocznik: 2013/2014 Język wykładowy: Polski
Wydział: Matematyki Stosowanej Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne Specjalność: Matematyka ubezpieczeniowa Rocznik: 2013/2014 Język wykładowy: Polski
Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne
 Wydział: Matematyki Stosowanej Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne Specjalność: Matematyka finansowa Rocznik: 2013/2014 Język wykładowy: Polski Semestr
Wydział: Matematyki Stosowanej Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne Specjalność: Matematyka finansowa Rocznik: 2013/2014 Język wykładowy: Polski Semestr
MATEMATYCZNE METODY WSPOMAGANIA PROCESÓW DECYZYJNYCH
 MATEMATYCZNE METODY WSPOMAGANIA PROCESÓW DECYZYJNYCH 1. Przedmiot nie wymaga przedmiotów poprzedzających 2. Treść przedmiotu Proces i cykl decyzyjny. Rola modelowania matematycznego w procesach decyzyjnych.
MATEMATYCZNE METODY WSPOMAGANIA PROCESÓW DECYZYJNYCH 1. Przedmiot nie wymaga przedmiotów poprzedzających 2. Treść przedmiotu Proces i cykl decyzyjny. Rola modelowania matematycznego w procesach decyzyjnych.
Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia
 Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia 1. Wymiń warunki równowagi dowolnego płaskiego układu sił. 2. Co można wyznaczyć w statycznej próbie rozciągani. 3.
Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia 1. Wymiń warunki równowagi dowolnego płaskiego układu sił. 2. Co można wyznaczyć w statycznej próbie rozciągani. 3.
Pytania kierunkowe KIB 10 KEEEIA 5 KMiPKM 5 KIS 4 KPB 4 KTMiM 4 KBEPiM 3 KMRiMB 3 KMiETI 2
 Kierunek: INŻYNIERIA BEZPIECZEŃSTWA I stopień studiów I. Pytania kierunkowe Pytania kierunkowe KIB 10 KEEEIA 5 KMiPKM 5 KIS 4 KPB 4 KTMiM 4 KBEPiM 3 KMRiMB 3 KMiETI 2 Katedra Budowy, Eksploatacji Pojazdów
Kierunek: INŻYNIERIA BEZPIECZEŃSTWA I stopień studiów I. Pytania kierunkowe Pytania kierunkowe KIB 10 KEEEIA 5 KMiPKM 5 KIS 4 KPB 4 KTMiM 4 KBEPiM 3 KMRiMB 3 KMiETI 2 Katedra Budowy, Eksploatacji Pojazdów
WYKŁAD 9 METODY ZMIENNEJ METRYKI
 WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
Zadanie transportowe i problem komiwojażera. Tadeusz Trzaskalik
 Zadanie transportowe i problem komiwojażera Tadeusz Trzaskalik 3.. Wprowadzenie Słowa kluczowe Zbilansowane zadanie transportowe Rozwiązanie początkowe Metoda minimalnego elementu macierzy kosztów Metoda
Zadanie transportowe i problem komiwojażera Tadeusz Trzaskalik 3.. Wprowadzenie Słowa kluczowe Zbilansowane zadanie transportowe Rozwiązanie początkowe Metoda minimalnego elementu macierzy kosztów Metoda
Instrukcja do ćwiczeń laboratoryjnych Numeryczne metody analizy konstrukcji
 POLITECHNIKA SZCZECIŃSKA KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN Ćwiczenie nr 7 Instrukcja do ćwiczeń laboratoryjnych Numeryczne metody analizy konstrukcji Analiza statyczna obciążonego kątownika
POLITECHNIKA SZCZECIŃSKA KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN Ćwiczenie nr 7 Instrukcja do ćwiczeń laboratoryjnych Numeryczne metody analizy konstrukcji Analiza statyczna obciążonego kątownika
Optymalizacja. Wybrane algorytmy
 dr hab. inż. Instytut Informatyki Politechnika Poznańska www.cs.put.poznan.pl/mkomosinski, Andrzej Jaszkiewicz Problem optymalizacji kombinatorycznej Problem optymalizacji kombinatorycznej jest problemem
dr hab. inż. Instytut Informatyki Politechnika Poznańska www.cs.put.poznan.pl/mkomosinski, Andrzej Jaszkiewicz Problem optymalizacji kombinatorycznej Problem optymalizacji kombinatorycznej jest problemem
ROBOTYKA I SYSTEMY DECYZYJNE
 POLITECHIK GDŃSK SPECJLOŚĆ ROBOTYK I SYSTEMY DECYZYJE prof. dr hab. inż. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych i Robotyki Wydział Elektroniki Telekomunikacji i Informatyki Oczekiwania względem
POLITECHIK GDŃSK SPECJLOŚĆ ROBOTYK I SYSTEMY DECYZYJE prof. dr hab. inż. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych i Robotyki Wydział Elektroniki Telekomunikacji i Informatyki Oczekiwania względem
Projektowanie Wirtualne bloki tematyczne PW I
 Podstawowe zagadnienia egzaminacyjne Projektowanie Wirtualne - część teoretyczna Projektowanie Wirtualne bloki tematyczne PW I 1. Projektowanie wirtualne specyfika procesu projektowania wirtualnego, podstawowe
Podstawowe zagadnienia egzaminacyjne Projektowanie Wirtualne - część teoretyczna Projektowanie Wirtualne bloki tematyczne PW I 1. Projektowanie wirtualne specyfika procesu projektowania wirtualnego, podstawowe
Ekonometria - ćwiczenia 10
 Ekonometria - ćwiczenia 10 Mateusz Myśliwski Zakład Ekonometrii Stosowanej Instytut Ekonometrii Kolegium Analiz Ekonomicznych Szkoła Główna Handlowa 14 grudnia 2012 Wprowadzenie Optymalizacja liniowa Na
Ekonometria - ćwiczenia 10 Mateusz Myśliwski Zakład Ekonometrii Stosowanej Instytut Ekonometrii Kolegium Analiz Ekonomicznych Szkoła Główna Handlowa 14 grudnia 2012 Wprowadzenie Optymalizacja liniowa Na
II-go stopnia. Stacjonarne. Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1. Zaawansowane metody wyznaczania parametrów regulatorów 2. Mechanizmy innowacyjne. 3. Sieci neuronowe w modelowaniu obiektów dynamicznych. 4. Zasady projektowania i
(ARK) Komputerowe sieci sterowania 1. Zaawansowane metody wyznaczania parametrów regulatorów 2. Mechanizmy innowacyjne. 3. Sieci neuronowe w modelowaniu obiektów dynamicznych. 4. Zasady projektowania i
Rozdział 1 PROGRAMOWANIE LINIOWE
 Wprowadzenie do badań operacyjnych z komputerem Opisy programów, ćwiczenia komputerowe i zadania. T. Trzaskalik (red.) Rozdział 1 PROGRAMOWANIE LINIOWE 1.2 Ćwiczenia komputerowe Ćwiczenie 1.1 Wykorzystując
Wprowadzenie do badań operacyjnych z komputerem Opisy programów, ćwiczenia komputerowe i zadania. T. Trzaskalik (red.) Rozdział 1 PROGRAMOWANIE LINIOWE 1.2 Ćwiczenia komputerowe Ćwiczenie 1.1 Wykorzystując
Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych
 inż. Marek Duczkowski Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych słowa kluczowe: algorytm gradientowy, optymalizacja, określanie wodnicy W artykule
inż. Marek Duczkowski Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych słowa kluczowe: algorytm gradientowy, optymalizacja, określanie wodnicy W artykule