Optymalizacja konstrukcji
|
|
|
- Dawid Turek
- 8 lat temu
- Przeglądów:
Transkrypt
1 Dariusz Skibicki dariusz.skibickiatutp.edu.pl Wydział Inżynierii Mechanicznej Uniwersytet Technologiczno Przyrodniczy im. Jana i Jędrzeja Śniadeckich w Bydgoszczy Optymalizacja konstrukcji
2 Plan wykładu 1. Konstruowanie a Konstrukcja dobra. Matematyczny model optymalizacji a Konstrukcja optymalna b Budowa modelu optymalizacji c Nieprawidłowe modele optymalizacji 3. Metody optymalizacji a Potrzeba metod optymalizacji b Błędy w metodach numerycznych c Poszukiwanie ekstremum na kierunku d Metody bezgradientowe 4. Oprogramowanie optymalizacyjne a Matlab b Ecel c Ansys 5. Polioptymalizacja 6. Metody globalne optymalizacji a Algorytmy genetyczne 7. Praktyka kiedy brak jawnej postaci modelu a MES b Aproksymacja, interpolacja e Metody gradientowe f Metody newtonowskie g Metody funkcji kary h Metoda simple
3 Konstruowanie 1. Projekt jest abstrakcyjnym obrazem wytworu.. Projekt jest zapisywany w postaci dokumentacji projektowej. 3. Projektowanie maszyn nazywa się konstruowaniem. 4. Konstruowanie polega na określeniu cech konstrukcyjnych: materiałowych, geometrycznych i montażowych. 5. Cechy konstrukcyjne dobieramy w oparciu o kryteria: - konstrukcyjne, - technologiczne, - eksploatacyjne. 3
4 Konstruowanie 1. Kryteria konstrukcyjne: właściwy układ przenoszenia obciążeń, wytrzymałość, sztywność.. Kryteria technologiczne: technologiczność, taniość i dostępność materiałów, łatwość montażu. 3. Kryteria eksploatacyjne: funkcjonalność, ergonomiczność, niezawodność, trwałość, sprawność, łatwość eksploatacji, naprawialność. 4
5 Konstruowanie Jeżeli każdej z cech konstrukcyjnych przypiszemy pewną liczbę, to całą konstrukcję możemy opisać zbiorem liczb. d w d w d w d z d z d z Matematyczny model konstrukcji 5
6 Konstruowanie Konstrukcja spełniająca wszystkie warunki konstrukcyjne nazywa się konstrukcją dobrą. d w d z, d w ϕ 0 1 d z Konstrukcja dobra 6
7 Konstruowanie Zadanie PKM Należy skonstruować wał drążony ze stali 55, której wytrzymałość na skręcanie wynosi k s =100 MPa. Wał powinien przenosić moment skręcający Ms=1000 Nm. Ze względów technologicznych, otwór wewnętrzny wału nie może być mniejszy niż 0% średnicy zewnętrznej oraz nie może być większy niż 80% tej średnicy. Ze względu na warunki montażu, średnica zewnętrzna wału nie powinna być większa od średnicy Ø50 mm otworu w korpusie maszyny. W osiągalnym asortymencie półwyrobów dostępne są pręty o średnicach nie mniejszych niż 38 mm. τ s k s 0. dw / d d 50 z z ϕ1 = d z + dw d z 0 ϕ = 0.d z d w 0 ϕ3 = 0.8d z + dw 0 ϕ4 = d z 50 0 ϕ5 = d z Różne konstrukcje dobre 7
8 Konstruowanie Zadanie PKM ϕ1 = d z + dw d z 0 ϕ3 0.8d z + d 0 = w ϕ5 = d z ϕ1 = d z + dw d z 0 ϕ 0.d z d 0 = w ϕ5 = d z ϕ 0.d z d 0 = w ϕ4 d 50 0 = z ϕ3 0.8d z + d 0 = w ϕ4 d 50 0 = z d d z w = 50mm = 10mm d d z w = 50mm = 40mm Różne konstrukcje dobre 8
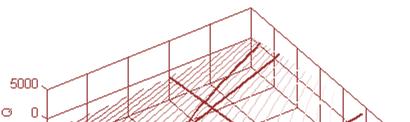
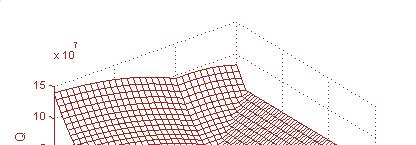
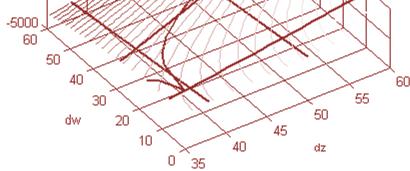
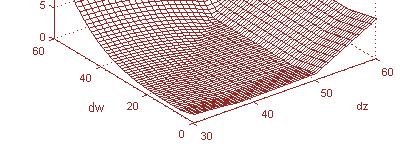
9 Matematyczny model optymalizacji Zmienne decyzyjne = [ ] 1... n Rozwiązanie optymalne Φ Q Funkcja celu Q Ograniczenia obszar rozwiązań dobrych ϕ 0 1 ϕ 0 dla j = 1, K q j, ϕ 0 ϕ5 0 ϕ 0 ϕ Konstrukcja dobrą najlepszą ze względu na kryterium optymalizacji nazywamy konstrukcją optymalną. 9
10 Matematyczny model optymalizacji Model opisowy Model matematyczny Należy skonstruować wał drążony ze stali 55, której wytrzymałość na skręcanie wynosi k s =100 MPa. Wał powinien przenosić moment skręcający Ms=1000 Nm. Ze względów technologicznych, otwór wewnętrzny wału nie może być mniejszy niż 0% średnicy zewnętrznej oraz nie może być większy niż 80% tej średnicy. Ze względu na warunki montażu, średnica zewnętrzna wału nie powinna być większa od średnicy Ø50 mm otworu w korpusie maszyny. W osiągalnym asortymencie półwyrobów dostępne są pręty o średnicach nie mniejszych niż 38 mm. Wał powinien być najlżejszy z możliwych. Zmienne decyzyjne = Funkcja celu [ d z d ] w Q = d z d w Ograniczenia obszar rozwiązań dobrych 4 4 = z w z 4 ϕ1 d + d d 0 ϕ = 0.d z dw 0 ϕ3 = 0.8d z + dw 0 ϕ4 = d z 50 0 ϕ5 = d z Przykład przewodni 1 10
![Matematyczny model optymalizacji Zmienne decyzyjne = [ d z d ] w Funkcja celu Q = d z d w](/docs-images/63/49371201/images/11-0.jpg "Ograniczenia obszar rozwiązań dobrych 4 4 4 ϕ1 = d z + dw + 5.1 10 d z 0 ϕ = 0.d z dw 0 ϕ3 = 0.")

11 Matematyczny model optymalizacji Zmienne decyzyjne = [ d z d ] w Funkcja celu Q = d z d w Ograniczenia obszar rozwiązań dobrych ϕ1 = d z + dw d z 0 ϕ = 0.d z dw 0 ϕ3 = 0.8d z + dw 0 ϕ4 = d z 50 0 ϕ5 = d z d 5.1 d 0. 5 ϕ1 dw z 10 : z ϕ : d 0. w d z ϕ 3 : d 0. 8 ϕ4 : d z ϕ5 : d z w d z φ5 ˆ φ 1 φ 3 opt φ 4 φ Φ Graficzne przedstawienie matematycznego modelu optymalizacji 11
12 Matematyczny model optymalizacji Model opisowy Model matematyczny W przedsiębiorstwie złożonym z 4 wydziałów produkcyjnych, specjalizujących się w określonej obróbce, wytwarza się wyroby. Normy czasowe potrzebne do wykonania jednej sztuki wyrobu na odpowiednich wydziałach oraz moce produkcyjne, jakimi dysponują poszczególne wydziały zestawiono w tabeli. Nr wydziału Normy czasowe dla Moc produkcyjna wyrobu [godz.] wydziału [godz.] wyrób 1 wyrób Na wyprodukowaniu jednej sztuki pierwszego wyrobu zakład zarabia 30 zł, zaś na wyprodukowaniu sztuki wyrobu drugiego 0 zł. Ile sztuk wyrobu pierwszego, a ile sztuk wyrobu drugiego powinno się produkować, aby w określonych powyżej warunkach produkcyjnych osiągnąć maksymalny zysk? Zmienne decyzyjne Funkcja celu [ 1 ] = Q = Ograniczenia obszar rozwiązań dobrych ϕ1 = ϕ = ϕ3 = ϕ4 = ϕ ϕ 5 = 1 6 = Przykład przewodni 1 1
![Matematyczny model optymalizacji Zmienne decyzyjne [ 1 ] = Funkcja celu Q = 301 + 0 ϕ1 = 1 + 1 0 ϕ = 11 + 9 0 ϕ3 = 41 + 0 16 ϕ4 = 01 + 4 14 ϕ 5 = 1 ϕ = 6 0 0](/docs-images/63/49371201/images/13-0.jpg "0 0 ϕ ϕ 1 : 1 + ϕ ϕ ϕ ϕ = : 1 + 3 : 1 = 4 : = 5 : 1 = 6 : = = 4 3.5 0 0 6 4.")
13 Matematyczny model optymalizacji Zmienne decyzyjne [ 1 ] = Funkcja celu Q = ϕ1 = ϕ = ϕ3 = ϕ4 = ϕ 5 = 1 ϕ = ϕ ϕ 1 : 1 + ϕ ϕ ϕ ϕ = : : 1 = 4 : = 5 : 1 = 6 : = = φ3 φ 1 φ 4 ˆ φ Φ Graficzne przedstawienie matematycznego modelu optymalizacji 13
14 Matematyczny model optymalizacji ϕ 0 = ϕ 0 1 = Q Nieprawidłowe modele optymalizacyjne 14
15 Optymalizacja obliczeń obliczeń = = 10 zmiennych podział 1 Metoda systematycznego przeszukiwania 15
16 Optymalizacja Załóżmy, że zadanie optymalizacji polega na skonstruowaniu najlżejszej kratownicy. Konstrukcja kratownicy złożona jest z 10 prętów. Żądamy spełnienia kryteriów wytrzymałościowych i sztywnościowych. Zakładamy, że średnica pręta może zmieniać się od 0 do 100 mm i że interesuje nas dokładność obliczeń rzędu 1 mm. Średnica każdego z 10 prętów może przyjąć więc jedną ze 100 wartości. Musimy sprawdzić, czy nie zostały naruszone ograniczenia dla każdej kombinacji danych. Dla rozwiązań dopuszczalnych musimy policzyć dodatkowo wartość funkcji celu. Jak łatwo sprawdzić, mamy do wykonania co najmniej obliczeń. Pętlę dodawania liczb całkowitych np. a=a+1, komputer z zegarem.4 MHz wykonuje w czasie s. Wynika z tego, że jedna operacja dodawania trwa 1.57*10-6 s. >> Miliony_Lat = 100^10*1.57*10^-6/60/60/4/365/ Miliony_Lat = 4.9 >> Miliony_Lat = 100^1*1.57*10^-6/60/60/4/365/ Miliony_Lat = 4.9e+004 Potrzeba metod numerycznych 16
17 Błędy w komputerze 1. Błędy wejściowe: wyniki pomiarów, stałe fizyczne.. Błędy zaokrągleń >> = 0. >> for i=1:00 =+0., end = Błędy obcięcia e i n = = i! n! i= Uwarunkowanie zadania 1 + 1,1 1 + = 10 = 10,4 1 = 4, = = 10 1, = 10,4 1 = 8, = 1 17
18 Metody poszukiwania ekstremum funkcji 1. Metody bezgradientowe. W przypadku tej grupy do znalezienia kierunku poprawy potrzebne są jedynie wartości funkcji. Do metod tej grupy zaliczyć można metody Gaussa- Seidla i Powella.. Metody gradientowe. Są to metody, których zastosowanie wymaga wyznaczenia wartości ś funkcji oraz jej gradientu. Jako przykłady posłużyć mogą: metoda gradientu prostego, metoda najszybszego spadku i metoda gradientu sprzężonego. 3. Metody newtonowskie. Są to metody w których procedura poszukiwania ekstremum funkcji wymaga wyznaczenia wartości, gradientu i hesjanu badanej funkcji. Takimi metodami są np. metoda Newtona-Raphsona i metoda Davidona-Fletchera-Powella. Ogólny podział metod 18
19 Metody bezgradientowe. Metody minimalizacji funkcji na kierunku Q 1. [ a ] 0 b 0 Qr0 Ql0. l r i i = b = a i i k b + k b i i 5 1 k = 0,618 a a i i Q a0 l0 ro b0 3. l i Q r i i+ 1 = a i Q i+ 1 i b = r a i+ 1 i Q l i > a = l Q r i i+ 1 i b = b 4. ε o a b i i a1 l1 l1 b1 5. = a b i i Metoda złotego podziału 19
20 Metody bezgradientowe. Metody minimalizacji funkcji na kierunku wielomian interpolacyjny f poszukiwane ekstremum nieznana funkcja Q ekstremum wielomianu interpolacyjnego Q f Qa Qc 0 Metoda interpolacji kwadratowej 1 c Q b a b Q a c a Q c b c Q b a b Q a c a Q c b m = c m a b b c a c b a c Q c b a b c a b Q c a b a c b a Q f + + = Qa Qb
21 Metody bezgradientowe 1. 0 = [ 1... n ] iteracja 1 0 ε 0, = 1 ε 1 0,1 etap 1 1, = 1,1 etap. 3. i-1 + j Q ε o = n i, j = 1 λ ε j j i i 1 min = j i 1, j 1 Metoda Gaussa-Seidela 1
22 Metody bezgradientowe 1. 0 = [ 1... n ] 0, ε 4 0,3 =1 1,. i-1 + j Q ε 3 ε 6 ε 5 i 1, n + 1 i 1, n 1,1 1,3 = 3. ε = n + 1 i 1, n + 1 i 1, n λ ε j j min 0 ε 1 ε ε 0,1 4. ε o i i 1 = ε 1 1 = n i, j = 1 j i 1, j Metoda Powella
23 Metody gradientowe 1. 0 = [ 1... n ] e. g i -1 = i-grad Q 1 g 5 β e βe 3 3. ε = g g i 1 i ε 0 g 1 e e 4. i i-1 = + eε i-1 g 0 0 i i-1 = + βeε i-1 1 Metoda największego spadku 3
24 Metody gradientowe 1. 0 = [ 1... n ] g g i-1 3 g = grad Q. i -1 g ε i 1 = g g i -1 ε i-1 Q + λ ε i 1 i 1 min g 0 1 Metoda gradientu prostego 4
25 Szereg Taylora f i i 1 f f ' f '' + i 1 i i 1 + i 1 1 i i 1 f = f=inline'.^3-*-5'; f1p=inline'3*.^-'; fp=inline'6*'; ploti, fi1,'k*' ploti, fi1+... f1pi1*i-i1,'ko' ploti, fi1+... f1pi1*i-i1+... fpi1*i-i1.^/,'k+' 5
26 Metoda Newtona f i i 1 f f ' f f '' + i 1 i i 1 + i 1 1 i i 1 i 1 i i 1 + i 1 f ' = 0 f f i 1 i i 1 i 1 1 f = i f ' i 1 i i i-1 = + Poszukiwanie miejsc zerowych 6
27 Metoda Newtona i i 1 i 1 1 f = i f ' f 3 = 5 i i-1 = + f=inline'.^3-*-5'; f1p=inline'3*.^-'; for i=:6 i=i-1-fi-1/f1pi-1; end Poszukiwanie miejsc zerowych 7
28 Metody Newtonowskie Poszukiwanie miejsc zerowych i i 1 i 1 1 f = i f ' f Poszukiwanie ekstremum i i 1 i 1 1 f ' = i f '' f' Poszukiwanie ekstremum 8

![*1+* ]'; :,1=[1;1]; for i=:5](/docs-images/63/49371201/images/29-1.jpg ":,i=:,i-1-h:,i-1\g:,i-1; end")
29 Metody Newtonowskie f = 1 + G=inline'[*1; *]'; H=inline'[ *1+*; *1+* ]'; :,1=[1;1]; for i=:5 :,i=:,i-1-h:,i-1\g:,i-1; end Poszukiwanie ekstremum 9
30 Optymalizacja z ograniczeniami Modyfikacja funkcji celu Q Q k Q k Q k = Q + m j j= 1 ϕ j r Q funkcja kary =0. =1 Q = 10 ϕ 1 = ϕ = 1 0 Q k r1 r = Metoda wewnętrznej funkcji kary 30
31 Optymalizacja z ograniczeniami Modyfikacja funkcji celu Q Q k Q k Q k m 1 = Q + ϕ j r i j= 1 funkcja kary =1 Q = 10 ϕ1 = [0, + 1 0] Q k = r 1 Metoda zewnętrznej funkcji kary 31
32 Optymalizacja z ograniczeniami opt Metoda zewnętrznej funkcji kary dla przykładu 1 3
33 Metoda simple ϕ 1 ϕ Q = + 1 Rozwiązanie optymalne ϕ 3 1 Iteracja metody gradientowej Iteracja metody Simple Liniowy model optymalizacji 33

34 Oprogramowanie optymalizacyjne Przykład 1 Przykład Ecel 34

35 Oprogramowanie optymalizacyjne Przykład 1 Ecel 35


36 Oprogramowanie optymalizacyjne Ecel 36
37 Oprogramowanie optymalizacyjne Przykład 1 Matlab 37

38 Oprogramowanie optymalizacyjne Przykład 1 Matlab 38


39 Oprogramowanie optymalizacyjne R1 Design variable OPVAR, H, DV, 0,H1-5,0.001 OPVAR, R1, DV, 5,H1/-X1//L*H-5,0.001 OPVAR, X1, DV, R1+5,L-R1-5,0.001 OPVAR, Y1, DV, X1/L*H+R1+5,H1-R1-5,0.001 X1 Y1 H State variable OPVAR, SMAX, SV,0,600,0.001 Objective function OPVAR, VOLUME, OBJ,,,0 Ansys 39
40 Polioptymalizacja Φ q a 3 a 1 a 4 a 1 a a 5 q min 1 q 1min q 1 zbiór rozwiązań polioptymalnych w zbiorze dopuszczalnym krzywa stanów polioptymalnych w zbiorze stanów osiągalnych Krzywa stanów polioptymalnych 40
41 Polioptymalizacja Q = p q pq q p 1 q = q 1 + p Q p krzywa stanów polioptymalnych w zbiorze stanów osiągalnych = m Q i= 1 p i q i q ˆ, q 1 ˆ q 1 Q = const Pseudopolioptymalizacja 41
42 Globalne metody optymalizacji 4
43 Globalne metody optymalizacji Algorytmy genetyczne 1975 L-systemy Zbiory rozmyte 1965 Fraktale 1975 lemu Skala rozwiązywanego probl Problemy klasy "NP" Sieci neuronowe 1943 Statystyka 181 Równania różniczkowe XVIII Automaty komórkowe 1948 Metody dyskretne MES Pewność, dokładność i rozwią ązania 43
44 Globalne metody optymalizacji Liczba dziesiętna Liczba binarna [ ] Populacja [ ] [ ] Osobnik Chromosom [ ] Osobnik Gen Algorytmy genetyczne 44
45 Globalne metody optymalizacji Start Losowanie populacji początkowej Selekcja wybór populacji rodzicielskiej Reprodukcja zastosowanie operatorów genetycznych Warunek zatrzymania Najlepszy osobnik Algorytmy genetyczne 45


46 Globalne metody optymalizacji Selekcja 46

47 Globalne metody optymalizacji Crossover Mutacja Reprodukcja 47
48 Globalne metody optymalizacji y = y - funkcja celu - zmienna decyzyjna Problem optymalizacyjny: znaleść takie dla którego y osiągnie wartość maksymalną Przykład 48
49 Globalne metody optymalizacji Osobnik Chromosom y Przystosowanie % % % % % % % % 0.54% 3.80% % % Przykład 49
50 Globalne metody optymalizacji Osobnik Chromosom y Przystosowanie % % % % % % % % 0.54% 3.80% Nr Dystrubuanta % 0.98% % % % % Nr Losowanie % % Nr Dystrubuanta Wylosowane liczby % % % % % % Osobnik populacji Osobnik rodzicielskiej populacji Pk Mk Chromosom Przykład 50
51 Globalne metody optymalizacji Wylosowane pary Chromosomy Punkt Podzielone Nowa krzyżowania chromosomy populacja 3 100** *** ** *** *** ** *** ** * ***** * ***** Przykład 51
52 Globalne metody optymalizacji Populacja Pk Osobnik Chromosom y Średnia: 589 Populacja Pk+1 Osobnik Chromosom y Średnia: Przykład 5
53 Globalne metody optymalizacji [ ] Wartość funkcji celu w pokoleniu Kratownica 53
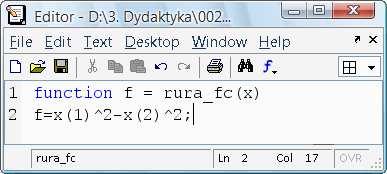
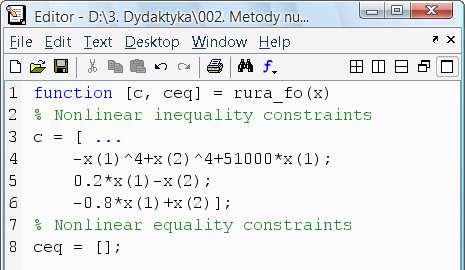
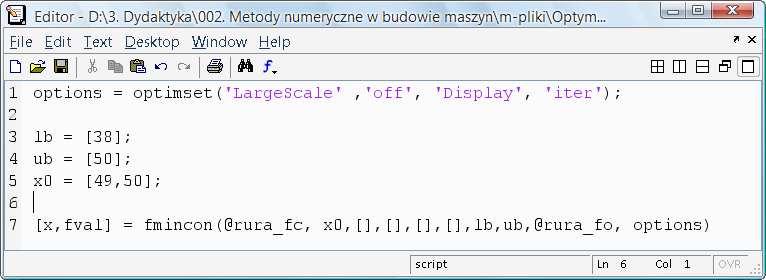
54 Praktyka kiedy brak jawnej postaci modelu 0 = ones3,1; [, fval] = function [c, ceq] = optym_fo_zuraw [U F Sigma Epsilon] = MESn, f, c,e, 0; end c = [ 5-; absu-; abssigma-100 ]; function waga = optym_fc_zuraw waga=sum; end MES 54
55 Praktyka kiedy brak jawnej postaci modelu Patrz Dodatek 1. Aproksymacja i interpolacja Aproksymacja i interpolacja 55
SCHEMAT ROZWIĄZANIA ZADANIA OPTYMALIZACJI PRZY POMOCY ALGORYTMU GENETYCZNEGO
 SCHEMAT ROZWIĄZANIA ZADANIA OPTYMALIZACJI PRZY POMOCY ALGORYTMU GENETYCZNEGO. Rzeczywistość (istniejąca lub projektowana).. Model fizyczny. 3. Model matematyczny (optymalizacyjny): a. Zmienne projektowania
SCHEMAT ROZWIĄZANIA ZADANIA OPTYMALIZACJI PRZY POMOCY ALGORYTMU GENETYCZNEGO. Rzeczywistość (istniejąca lub projektowana).. Model fizyczny. 3. Model matematyczny (optymalizacyjny): a. Zmienne projektowania
Z-ZIP2-303z Zagadnienia optymalizacji Problems of optimization
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 0/03 Z-ZIP-303z Zagadnienia optymalizacji Problems of optimization A. USYTUOWANIE
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 0/03 Z-ZIP-303z Zagadnienia optymalizacji Problems of optimization A. USYTUOWANIE
Algorytmy genetyczne. Materiały do laboratorium PSI. Studia niestacjonarne
 Algorytmy genetyczne Materiały do laboratorium PSI Studia niestacjonarne Podstawowy algorytm genetyczny (PAG) Schemat blokowy algorytmu genetycznego Znaczenia, pochodzących z biologii i genetyki, pojęć
Algorytmy genetyczne Materiały do laboratorium PSI Studia niestacjonarne Podstawowy algorytm genetyczny (PAG) Schemat blokowy algorytmu genetycznego Znaczenia, pochodzących z biologii i genetyki, pojęć
Algorytm genetyczny (genetic algorithm)-
-") Optymalizacja W praktyce inżynierskiej często zachodzi potrzeba znalezienia parametrów, dla których system/urządzenie będzie działać w sposób optymalny. Klasyczne podejście do optymalizacji: sformułowanie
Optymalizacja W praktyce inżynierskiej często zachodzi potrzeba znalezienia parametrów, dla których system/urządzenie będzie działać w sposób optymalny. Klasyczne podejście do optymalizacji: sformułowanie
Podstawy Konstrukcji Maszyn. Wykład nr. 1_01
 Podstawy Konstrukcji Maszyn Wykład nr. 1_01 Zaliczenie: Kolokwium na koniec semestru obejmujące : - część teoretyczną - obliczenia (tylko inż. i zarz.) Minimum na ocenę dostateczną 55% - termin zerowy
Podstawy Konstrukcji Maszyn Wykład nr. 1_01 Zaliczenie: Kolokwium na koniec semestru obejmujące : - część teoretyczną - obliczenia (tylko inż. i zarz.) Minimum na ocenę dostateczną 55% - termin zerowy
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Metody optymalizacji Metody poszukiwania ekstremum funkcji jednej zmiennej Materiały pomocnicze do ćwiczeń
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Metody optymalizacji Metody poszukiwania ekstremum funkcji jednej zmiennej Materiały pomocnicze do ćwiczeń
11. 11. OPTYMALIZACJA KONSTRUKCJI
 11. OPTYMALIZACJA KONSTRUKCJI 1 11. 11. OPTYMALIZACJA KONSTRUKCJI 11.1. Wprowadzenie 1. Optymalizacja potocznie i matematycznie 2. Przykład 3. Kryterium optymalizacji 4. Ograniczenia w zadaniach optymalizacji
11. OPTYMALIZACJA KONSTRUKCJI 1 11. 11. OPTYMALIZACJA KONSTRUKCJI 11.1. Wprowadzenie 1. Optymalizacja potocznie i matematycznie 2. Przykład 3. Kryterium optymalizacji 4. Ograniczenia w zadaniach optymalizacji
WYKŁAD 9 METODY ZMIENNEJ METRYKI
 WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
Metody Rozmyte i Algorytmy Ewolucyjne
 mgr inż. Wydział Matematyczno-Przyrodniczy Szkoła Nauk Ścisłych Uniwersytet Kardynała Stefana Wyszyńskiego Podstawowe operatory genetyczne Plan wykładu Przypomnienie 1 Przypomnienie Metody generacji liczb
mgr inż. Wydział Matematyczno-Przyrodniczy Szkoła Nauk Ścisłych Uniwersytet Kardynała Stefana Wyszyńskiego Podstawowe operatory genetyczne Plan wykładu Przypomnienie 1 Przypomnienie Metody generacji liczb
Programowanie liniowe całkowitoliczbowe. Tadeusz Trzaskalik
 Programowanie liniowe całkowitoliczbowe Tadeusz Trzaskalik .. Wprowadzenie Słowa kluczowe Rozwiązanie całkowitoliczbowe Założenie podzielności Warunki całkowitoliczbowości Czyste zadanie programowania
Programowanie liniowe całkowitoliczbowe Tadeusz Trzaskalik .. Wprowadzenie Słowa kluczowe Rozwiązanie całkowitoliczbowe Założenie podzielności Warunki całkowitoliczbowości Czyste zadanie programowania
LABORATORIUM 4: Algorytmy ewolucyjne cz. 2 wpływ operatorów krzyżowania i mutacji na skuteczność poszukiwań AE
 Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny, Politechnika Śląska www.imio.polsl.pl METODY HEURYSTYCZNE LABORATORIUM 4: Algorytmy ewolucyjne cz. 2 wpływ operatorów krzyżowania
Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny, Politechnika Śląska www.imio.polsl.pl METODY HEURYSTYCZNE LABORATORIUM 4: Algorytmy ewolucyjne cz. 2 wpływ operatorów krzyżowania
ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ
 ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie minimalizacji bez ograniczeń f(ˆx) = min x R nf(x) f : R n R funkcja ograniczona z dołu Algorytm rozwiazywania Rekurencyjny
ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie minimalizacji bez ograniczeń f(ˆx) = min x R nf(x) f : R n R funkcja ograniczona z dołu Algorytm rozwiazywania Rekurencyjny
Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, Spis treści
 Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, 2017 Spis treści Od autorów 11 I. Klasyczne metody numeryczne Rozdział 1. Na początek 15 1.1.
Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, 2017 Spis treści Od autorów 11 I. Klasyczne metody numeryczne Rozdział 1. Na początek 15 1.1.
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metody kierunków poparwy (metoda Newtona-Raphsona, metoda gradientów sprzężonych) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.03.2019 1
Optymalizacja ciągła 5. Metody kierunków poparwy (metoda Newtona-Raphsona, metoda gradientów sprzężonych) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.03.2019 1
Metody numeryczne Technika obliczeniowa i symulacyjna Sem. 2, EiT, 2014/2015
 Metody numeryczne Technika obliczeniowa i symulacyjna Sem. 2, EiT, 2014/2015 1 Metody numeryczne Dział matematyki Metody rozwiązywania problemów matematycznych za pomocą operacji na liczbach. Otrzymywane
Metody numeryczne Technika obliczeniowa i symulacyjna Sem. 2, EiT, 2014/2015 1 Metody numeryczne Dział matematyki Metody rozwiązywania problemów matematycznych za pomocą operacji na liczbach. Otrzymywane
Algorytmy genetyczne. Materiały do laboratorium PSI. Studia stacjonarne i niestacjonarne
 Algorytmy genetyczne Materiały do laboratorium PSI Studia stacjonarne i niestacjonarne Podstawowy algorytm genetyczny (PAG) Schemat blokowy algorytmu genetycznego Znaczenia, pochodzących z biologii i genetyki,
Algorytmy genetyczne Materiały do laboratorium PSI Studia stacjonarne i niestacjonarne Podstawowy algorytm genetyczny (PAG) Schemat blokowy algorytmu genetycznego Znaczenia, pochodzących z biologii i genetyki,
Modelowanie w projektowaniu maszyn i procesów cz.5
 Modelowanie w projektowaniu maszyn i procesów cz.5 Metoda Elementów Skończonych i analizy optymalizacyjne w środowisku CAD Dr hab inż. Piotr Pawełko p. 141 Piotr.Pawełko@zut.edu.pl www.piopawelko.zut.edu.pl
Modelowanie w projektowaniu maszyn i procesów cz.5 Metoda Elementów Skończonych i analizy optymalizacyjne w środowisku CAD Dr hab inż. Piotr Pawełko p. 141 Piotr.Pawełko@zut.edu.pl www.piopawelko.zut.edu.pl
Plan. Zakres badań teorii optymalizacji. Teoria optymalizacji. Teoria optymalizacji a badania operacyjne. Badania operacyjne i teoria optymalizacji
 Badania operacyjne i teoria optymalizacji Instytut Informatyki Poznań, 2011/2012 1 2 3 Teoria optymalizacji Teoria optymalizacji a badania operacyjne Teoria optymalizacji zajmuje się badaniem metod optymalizacji
Badania operacyjne i teoria optymalizacji Instytut Informatyki Poznań, 2011/2012 1 2 3 Teoria optymalizacji Teoria optymalizacji a badania operacyjne Teoria optymalizacji zajmuje się badaniem metod optymalizacji
Testy De Jonga. Problemy. 1 Optymalizacja dyskretna i ciągła
 Problemy 1 Optymalizacja dyskretna i ciągła Problemy 1 Optymalizacja dyskretna i ciągła 2 Środowisko pomiarowe De Jonga Problemy 1 Optymalizacja dyskretna i ciągła 2 Środowisko pomiarowe De Jonga 3 Ocena
Problemy 1 Optymalizacja dyskretna i ciągła Problemy 1 Optymalizacja dyskretna i ciągła 2 Środowisko pomiarowe De Jonga Problemy 1 Optymalizacja dyskretna i ciągła 2 Środowisko pomiarowe De Jonga 3 Ocena
Optymalizacja systemów
 Optymalizacja systemów Laboratorium - problem detekcji twarzy autorzy: A. Gonczarek, J.M. Tomczak, S. Zaręba, P. Klukowski Cel zadania Celem zadania jest zapoznanie się z gradientowymi algorytmami optymalizacji
Optymalizacja systemów Laboratorium - problem detekcji twarzy autorzy: A. Gonczarek, J.M. Tomczak, S. Zaręba, P. Klukowski Cel zadania Celem zadania jest zapoznanie się z gradientowymi algorytmami optymalizacji
Metody Rozmyte i Algorytmy Ewolucyjne
 mgr inż. Wydział Matematyczno-Przyrodniczy Szkoła Nauk Ścisłych Uniwersytet Kardynała Stefana Wyszyńskiego Podstawy optymalizacji Plan prezentacji 1 Podstawy matematyczne 2 3 Eliminacja ograniczeń Metody
mgr inż. Wydział Matematyczno-Przyrodniczy Szkoła Nauk Ścisłych Uniwersytet Kardynała Stefana Wyszyńskiego Podstawy optymalizacji Plan prezentacji 1 Podstawy matematyczne 2 3 Eliminacja ograniczeń Metody
RYNEK CIEPŁA REC 2013 OPTYMALIZACJA ROZDZIAŁU OBCIĄŻEŃ POMIĘDZY PRACUJĄCE RÓWNOLEGLE BLOKI CIEPŁOWNICZE
 RYEK CIEPŁA REC 2013 OPTYMALIZACJA ROZDZIAŁU OBCIĄŻEŃ POMIĘDZY PRACUJĄCE RÓWOLEGLE BLOKI CIEPŁOWICZE Prof. dr ha. inż. Henryk Rusinowski Dr ha. inż. Marcin Szega Prof. nzw. w Pol. Śl. Mgr inż. Marcin Plis
RYEK CIEPŁA REC 2013 OPTYMALIZACJA ROZDZIAŁU OBCIĄŻEŃ POMIĘDZY PRACUJĄCE RÓWOLEGLE BLOKI CIEPŁOWICZE Prof. dr ha. inż. Henryk Rusinowski Dr ha. inż. Marcin Szega Prof. nzw. w Pol. Śl. Mgr inż. Marcin Plis
6. Klasyczny algorytm genetyczny. 1
 6. Klasyczny algorytm genetyczny. 1 Idea algorytmu genetycznego została zaczerpnięta z nauk przyrodniczych opisujących zjawiska doboru naturalnego i dziedziczenia. Mechanizmy te polegają na przetrwaniu
6. Klasyczny algorytm genetyczny. 1 Idea algorytmu genetycznego została zaczerpnięta z nauk przyrodniczych opisujących zjawiska doboru naturalnego i dziedziczenia. Mechanizmy te polegają na przetrwaniu
Strategie ewolucyjne. Gnypowicz Damian Staniszczak Łukasz Woźniak Marek
 Strategie ewolucyjne Gnypowicz Damian Staniszczak Łukasz Woźniak Marek Strategie ewolucyjne, a algorytmy genetyczne Podobieństwa: Oba działają na populacjach rozwiązań Korzystają z zasad selecji i przetwarzania
Strategie ewolucyjne Gnypowicz Damian Staniszczak Łukasz Woźniak Marek Strategie ewolucyjne, a algorytmy genetyczne Podobieństwa: Oba działają na populacjach rozwiązań Korzystają z zasad selecji i przetwarzania
Aproksymacja funkcji a regresja symboliczna
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Optymalizacja konstrukcji
 Optymalizacja konstrukcji Kształtowanie konstrukcyjne: nadanie właściwych cech konstrukcyjnych przeszłej maszynie określenie z jakiego punktu widzenia (wg jakiego kryterium oceny) będą oceniane alternatywne
Optymalizacja konstrukcji Kształtowanie konstrukcyjne: nadanie właściwych cech konstrukcyjnych przeszłej maszynie określenie z jakiego punktu widzenia (wg jakiego kryterium oceny) będą oceniane alternatywne
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Metody optymalizacji Metody bezgradientowe optymalizacji bez ograniczeń Materiały pomocnicze do ćwiczeń
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Metody optymalizacji Metody bezgradientowe optymalizacji bez ograniczeń Materiały pomocnicze do ćwiczeń
Zagadnienia optymalizacji Problems of optimization
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 0/04 Zagadnienia optymalizacji Problems of optimization A. USYTUOWANIE MODUŁU W
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 0/04 Zagadnienia optymalizacji Problems of optimization A. USYTUOWANIE MODUŁU W
Zadanie 5 - Algorytmy genetyczne (optymalizacja)
") Zadanie 5 - Algorytmy genetyczne (optymalizacja) Marcin Pietrzykowski mpietrzykowski@wi.zut.edu.pl wersja 1.0 1 Cel Celem zadania jest zapoznanie się z Algorytmami Genetycznymi w celu rozwiązywanie zadania
Zadanie 5 - Algorytmy genetyczne (optymalizacja) Marcin Pietrzykowski mpietrzykowski@wi.zut.edu.pl wersja 1.0 1 Cel Celem zadania jest zapoznanie się z Algorytmami Genetycznymi w celu rozwiązywanie zadania
KADD Minimalizacja funkcji
 Minimalizacja funkcji Poszukiwanie minimum funkcji Foma kwadratowa Metody przybliżania minimum minimalizacja Minimalizacja w n wymiarach Metody poszukiwania minimum Otaczanie minimum Podział obszaru zawierającego
Minimalizacja funkcji Poszukiwanie minimum funkcji Foma kwadratowa Metody przybliżania minimum minimalizacja Minimalizacja w n wymiarach Metody poszukiwania minimum Otaczanie minimum Podział obszaru zawierającego
KADD Minimalizacja funkcji
 Minimalizacja funkcji n-wymiarowych Forma kwadratowa w n wymiarach Procedury minimalizacji Minimalizacja wzdłuż prostej w n-wymiarowej przestrzeni Metody minimalizacji wzdłuż osi współrzędnych wzdłuż kierunków
Minimalizacja funkcji n-wymiarowych Forma kwadratowa w n wymiarach Procedury minimalizacji Minimalizacja wzdłuż prostej w n-wymiarowej przestrzeni Metody minimalizacji wzdłuż osi współrzędnych wzdłuż kierunków
Numeryczne metody optymalizacji Optymalizacja w kierunku. informacje dodatkowe
 Numeryczne metody optymalizacji Optymalizacja w kierunku informacje dodatkowe Numeryczne metody optymalizacji x F x = min x D x F(x) Problemy analityczne: 1. Nieliniowa złożona funkcja celu F i ograniczeń
Numeryczne metody optymalizacji Optymalizacja w kierunku informacje dodatkowe Numeryczne metody optymalizacji x F x = min x D x F(x) Problemy analityczne: 1. Nieliniowa złożona funkcja celu F i ograniczeń
w analizie wyników badań eksperymentalnych, w problemach modelowania zjawisk fizycznych, w analizie obserwacji statystycznych.
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(), zwaną funkcją aproksymującą
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Algorytmy genetyczne
 Politechnika Łódzka Katedra Informatyki Stosowanej Algorytmy genetyczne Wykład 2 Przygotował i prowadzi: Dr inż. Piotr Urbanek Powtórzenie Pytania: Jaki mechanizm jest stosowany w naturze do takiego modyfikowania
Politechnika Łódzka Katedra Informatyki Stosowanej Algorytmy genetyczne Wykład 2 Przygotował i prowadzi: Dr inż. Piotr Urbanek Powtórzenie Pytania: Jaki mechanizm jest stosowany w naturze do takiego modyfikowania
PLAN WYKŁADU OPTYMALIZACJA GLOBALNA OPERATOR KRZYŻOWANIA ETAPY KRZYŻOWANIA
 PLAN WYKŁADU Operator krzyżowania Operator mutacji Operator inwersji Sukcesja Przykłady symulacji AG Kodowanie - rodzaje OPTYMALIZACJA GLOBALNA Wykład 3 dr inż. Agnieszka Bołtuć OPERATOR KRZYŻOWANIA Wymiana
PLAN WYKŁADU Operator krzyżowania Operator mutacji Operator inwersji Sukcesja Przykłady symulacji AG Kodowanie - rodzaje OPTYMALIZACJA GLOBALNA Wykład 3 dr inż. Agnieszka Bołtuć OPERATOR KRZYŻOWANIA Wymiana
ALGORYTMY EWOLUCYJNE W OPTYMALIZACJI JEDNOKRYTERIALNEJ
 ALGORYTMY EWOLUCYJNE W OPTYMALIZACJI JEDNOKRYTERIALNEJ Zalety: nie wprowadzają żadnych ograniczeń na sformułowanie problemu optymalizacyjnego. Funkcja celu może być wielowartościowa i nieciągła, obszar
ALGORYTMY EWOLUCYJNE W OPTYMALIZACJI JEDNOKRYTERIALNEJ Zalety: nie wprowadzają żadnych ograniczeń na sformułowanie problemu optymalizacyjnego. Funkcja celu może być wielowartościowa i nieciągła, obszar
BŁĘDY OBLICZEŃ NUMERYCZNYCH
 BŁĘDY OBLICZEŃ NUMERYCZNYCH błędy zaokrągleń skończona liczba cyfr (bitów) w reprezentacji numerycznej błędy obcięcia rozwinięcia w szeregi i procesy iteracyjne - w praktyce muszą być skończone błędy metody
BŁĘDY OBLICZEŃ NUMERYCZNYCH błędy zaokrągleń skończona liczba cyfr (bitów) w reprezentacji numerycznej błędy obcięcia rozwinięcia w szeregi i procesy iteracyjne - w praktyce muszą być skończone błędy metody
Strategie ewolucyjne (ang. evolu4on strategies)
") Strategie ewolucyjne (ang. evolu4on strategies) Strategia ewolucyjna (1+1) W Strategii Ewolucyjnej(1 + 1), populacja złożona z jednego osobnika generuje jednego potomka. Kolejne (jednoelementowe) populacje
Strategie ewolucyjne (ang. evolu4on strategies) Strategia ewolucyjna (1+1) W Strategii Ewolucyjnej(1 + 1), populacja złożona z jednego osobnika generuje jednego potomka. Kolejne (jednoelementowe) populacje
REPREZENTACJA LICZBY, BŁĘDY, ALGORYTMY W OBLICZENIACH
 REPREZENTACJA LICZBY, BŁĘDY, ALGORYTMY W OBLICZENIACH Transport, studia I stopnia rok akademicki 2012/2013 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Pojęcie
REPREZENTACJA LICZBY, BŁĘDY, ALGORYTMY W OBLICZENIACH Transport, studia I stopnia rok akademicki 2012/2013 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Pojęcie
Excel - użycie dodatku Solver
 PWSZ w Głogowie Excel - użycie dodatku Solver Dodatek Solver jest narzędziem używanym do numerycznej optymalizacji nieliniowej (szukanie minimum funkcji) oraz rozwiązywania równań nieliniowych. Przed pierwszym
PWSZ w Głogowie Excel - użycie dodatku Solver Dodatek Solver jest narzędziem używanym do numerycznej optymalizacji nieliniowej (szukanie minimum funkcji) oraz rozwiązywania równań nieliniowych. Przed pierwszym
ALGORYTMY GENETYCZNE ćwiczenia
 ćwiczenia Wykorzystaj algorytmy genetyczne do wyznaczenia minimum globalnego funkcji testowej: 1. Wylosuj dwuwymiarową tablicę 100x2 liczb 8-bitowych z zakresu [-100; +100] reprezentujących inicjalną populację
ćwiczenia Wykorzystaj algorytmy genetyczne do wyznaczenia minimum globalnego funkcji testowej: 1. Wylosuj dwuwymiarową tablicę 100x2 liczb 8-bitowych z zakresu [-100; +100] reprezentujących inicjalną populację
Algorytmy genetyczne w optymalizacji
 Algorytmy genetyczne w optymalizacji Literatura 1. David E. Goldberg, Algorytmy genetyczne i ich zastosowania, WNT, Warszawa 1998; 2. Zbigniew Michalewicz, Algorytmy genetyczne + struktury danych = programy
Algorytmy genetyczne w optymalizacji Literatura 1. David E. Goldberg, Algorytmy genetyczne i ich zastosowania, WNT, Warszawa 1998; 2. Zbigniew Michalewicz, Algorytmy genetyczne + struktury danych = programy
Wprowadzenie Metoda bisekcji Metoda regula falsi Metoda siecznych Metoda stycznych RÓWNANIA NIELINIOWE
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Zazwyczaj nie można znaleźć
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Zazwyczaj nie można znaleźć
Algorytmy ewolucyjne - algorytmy genetyczne. I. Karcz-Dulęba
 Algorytmy ewolucyjne - algorytmy genetyczne I. Karcz-Dulęba Algorytmy klasyczne a algorytmy ewolucyjne Przeszukiwanie przestrzeni przez jeden punkt bazowy Przeszukiwanie przestrzeni przez zbiór punktów
Algorytmy ewolucyjne - algorytmy genetyczne I. Karcz-Dulęba Algorytmy klasyczne a algorytmy ewolucyjne Przeszukiwanie przestrzeni przez jeden punkt bazowy Przeszukiwanie przestrzeni przez zbiór punktów
REPREZENTACJA LICZBY, BŁĘDY, ALGORYTMY W OBLICZENIACH
 REPREZENTACJA LICZBY, BŁĘDY, ALGORYTMY W OBLICZENIACH Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Reprezentacja
REPREZENTACJA LICZBY, BŁĘDY, ALGORYTMY W OBLICZENIACH Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Reprezentacja
Zwięzły kurs analizy numerycznej
 Spis treści Przedmowa... 7 1. Cyfry, liczby i błędy podstawy analizy numerycznej... 11 1.1. Systemy liczbowe... 11 1.2. Binarna reprezentacja zmiennoprzecinkowa... 16 1.3. Arytmetyka zmiennopozycyjna...
Spis treści Przedmowa... 7 1. Cyfry, liczby i błędy podstawy analizy numerycznej... 11 1.1. Systemy liczbowe... 11 1.2. Binarna reprezentacja zmiennoprzecinkowa... 16 1.3. Arytmetyka zmiennopozycyjna...
POLITECHNIKA CZĘSTOCHOWSKA. Poszukiwanie optymalnej średnicy rurociągu oraz grubości izolacji
 POLITECHNIKA CZĘSTOCHOWSKA Instytut Maszyn Cieplnych Optymalizacja Procesów Cieplnych Ćwiczenie nr 3 Poszukiwanie optymalnej średnicy rurociągu oraz grubości izolacji Częstochowa 2002 Wstęp. Ze względu
POLITECHNIKA CZĘSTOCHOWSKA Instytut Maszyn Cieplnych Optymalizacja Procesów Cieplnych Ćwiczenie nr 3 Poszukiwanie optymalnej średnicy rurociągu oraz grubości izolacji Częstochowa 2002 Wstęp. Ze względu
Metody Numeryczne Optymalizacja. Wojciech Szewczuk
 Metody Numeryczne Optymalizacja Optymalizacja Definicja 1 Przez optymalizację będziemy rozumieć szukanie minimów lub maksimów funkcji. Optymalizacja Definicja 2 Optymalizacja lub programowanie matematyczne
Metody Numeryczne Optymalizacja Optymalizacja Definicja 1 Przez optymalizację będziemy rozumieć szukanie minimów lub maksimów funkcji. Optymalizacja Definicja 2 Optymalizacja lub programowanie matematyczne
Algorytmy ewolucyjne NAZEWNICTWO
 Algorytmy ewolucyjne http://zajecia.jakubw.pl/nai NAZEWNICTWO Algorytmy ewolucyjne nazwa ogólna, obejmująca metody szczegółowe, jak np.: algorytmy genetyczne programowanie genetyczne strategie ewolucyjne
Algorytmy ewolucyjne http://zajecia.jakubw.pl/nai NAZEWNICTWO Algorytmy ewolucyjne nazwa ogólna, obejmująca metody szczegółowe, jak np.: algorytmy genetyczne programowanie genetyczne strategie ewolucyjne
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
Algorytmy genetyczne. Paweł Cieśla. 8 stycznia 2009
 Algorytmy genetyczne Paweł Cieśla 8 stycznia 2009 Genetyka - nauka o dziedziczeniu cech pomiędzy pokoleniami. Geny są czynnikami, które decydują o wyglądzie, zachowaniu, rozmnażaniu każdego żywego organizmu.
Algorytmy genetyczne Paweł Cieśla 8 stycznia 2009 Genetyka - nauka o dziedziczeniu cech pomiędzy pokoleniami. Geny są czynnikami, które decydują o wyglądzie, zachowaniu, rozmnażaniu każdego żywego organizmu.
Spis treści 377 379 WSTĘP... 9
 Spis treści 377 379 Spis treści WSTĘP... 9 ZADANIE OPTYMALIZACJI... 9 PRZYKŁAD 1... 9 Założenia... 10 Model matematyczny zadania... 10 PRZYKŁAD 2... 10 PRZYKŁAD 3... 11 OPTYMALIZACJA A POLIOPTYMALIZACJA...
Spis treści 377 379 Spis treści WSTĘP... 9 ZADANIE OPTYMALIZACJI... 9 PRZYKŁAD 1... 9 Założenia... 10 Model matematyczny zadania... 10 PRZYKŁAD 2... 10 PRZYKŁAD 3... 11 OPTYMALIZACJA A POLIOPTYMALIZACJA...
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2016/2017
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 206/207 Kierunek studiów: Budownictwo Profil:
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 206/207 Kierunek studiów: Budownictwo Profil:
STATYSTYKA MATEMATYCZNA WYKŁAD 4. WERYFIKACJA HIPOTEZ PARAMETRYCZNYCH X - cecha populacji, θ parametr rozkładu cechy X.
 STATYSTYKA MATEMATYCZNA WYKŁAD 4 WERYFIKACJA HIPOTEZ PARAMETRYCZNYCH X - cecha populacji, θ parametr rozkładu cechy X. Wysuwamy hipotezy: zerową (podstawową H ( θ = θ i alternatywną H, która ma jedną z
STATYSTYKA MATEMATYCZNA WYKŁAD 4 WERYFIKACJA HIPOTEZ PARAMETRYCZNYCH X - cecha populacji, θ parametr rozkładu cechy X. Wysuwamy hipotezy: zerową (podstawową H ( θ = θ i alternatywną H, która ma jedną z
Programowanie matematyczne
 dr Adam Sojda Badania Operacyjne Wykład Politechnika Śląska Programowanie matematyczne Programowanie matematyczne, to problem optymalizacyjny w postaci: f ( x) max przy warunkach g( x) 0 h( x) = 0 x X
dr Adam Sojda Badania Operacyjne Wykład Politechnika Śląska Programowanie matematyczne Programowanie matematyczne, to problem optymalizacyjny w postaci: f ( x) max przy warunkach g( x) 0 h( x) = 0 x X
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Struktury i Algorytmy Wspomagania Decyzji Zadanie projektowe 2 Czas realizacji: 6 godzin Maksymalna liczba
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Struktury i Algorytmy Wspomagania Decyzji Zadanie projektowe 2 Czas realizacji: 6 godzin Maksymalna liczba
Całkowanie numeryczne
 Całkowanie numeryczne Poniżej omówione zostanie kilka metod przybliżania operacji całkowania i różniczkowania w szczególności uzależnieniu pochodnej od jej różnic skończonych gdy równanie różniczkowe mamy
Całkowanie numeryczne Poniżej omówione zostanie kilka metod przybliżania operacji całkowania i różniczkowania w szczególności uzależnieniu pochodnej od jej różnic skończonych gdy równanie różniczkowe mamy
Podstawy Sztucznej Inteligencji (PSZT)
") Podstawy Sztucznej Inteligencji (PSZT) Paweł Wawrzyński Uczenie maszynowe Sztuczne sieci neuronowe Plan na dziś Uczenie maszynowe Problem aproksymacji funkcji Sieci neuronowe PSZT, zima 2013, wykład 12
Podstawy Sztucznej Inteligencji (PSZT) Paweł Wawrzyński Uczenie maszynowe Sztuczne sieci neuronowe Plan na dziś Uczenie maszynowe Problem aproksymacji funkcji Sieci neuronowe PSZT, zima 2013, wykład 12
Oprogramowanie CAD. w projektowaniu konstrukcji mechanicznych
 Oprogramowanie CAD w projektowaniu konstrukcji mechanicznych Opracował: dr inż.zbigniew Rudnicki Oprogramowanie CAD w projektowaniu konstrukcji mechanicznych Wykład 1: Organizacja i tematyka zajęć Podstawowe
Oprogramowanie CAD w projektowaniu konstrukcji mechanicznych Opracował: dr inż.zbigniew Rudnicki Oprogramowanie CAD w projektowaniu konstrukcji mechanicznych Wykład 1: Organizacja i tematyka zajęć Podstawowe
x y
 Przykłady pytań na egzamin końcowy: (Uwaga! Skreślone pytania nie obowiązują w tym roku.). Oblicz wartość interpolacji funkcjami sklejanymi (przypadek (case) a), dla danych i =[- 4 5], y i =[0 4 -]. Jaka
Przykłady pytań na egzamin końcowy: (Uwaga! Skreślone pytania nie obowiązują w tym roku.). Oblicz wartość interpolacji funkcjami sklejanymi (przypadek (case) a), dla danych i =[- 4 5], y i =[0 4 -]. Jaka
8. PODSTAWY ANALIZY NIELINIOWEJ
 8. PODSTAWY ANALIZY NIELINIOWEJ 1 8. 8. PODSTAWY ANALIZY NIELINIOWEJ 8.1. Wprowadzenie Zadania nieliniowe mają swoje zastosowanie na przykład w rozwiązywaniu cięgien. Przyczyny nieliniowości: 1) geometryczne:
8. PODSTAWY ANALIZY NIELINIOWEJ 1 8. 8. PODSTAWY ANALIZY NIELINIOWEJ 8.1. Wprowadzenie Zadania nieliniowe mają swoje zastosowanie na przykład w rozwiązywaniu cięgien. Przyczyny nieliniowości: 1) geometryczne:
doc. dr Beata Pułska-Turyna Zarządzanie B506 mail: mgr Piotr J. Gadecki Zakład Badań Operacyjnych Zarządzania B 505.
 doc. dr Beata Pułska-Turyna Zakład Badań Operacyjnych Zarządzanie B506 mail: turynab@wz.uw.edu.pl mgr Piotr J. Gadecki Zakład Badań Operacyjnych Zarządzania B 505. Tel.: (22)55 34 144 Mail: student@pgadecki.pl
doc. dr Beata Pułska-Turyna Zakład Badań Operacyjnych Zarządzanie B506 mail: turynab@wz.uw.edu.pl mgr Piotr J. Gadecki Zakład Badań Operacyjnych Zarządzania B 505. Tel.: (22)55 34 144 Mail: student@pgadecki.pl
Zadania laboratoryjne i projektowe - wersja β
 Zadania laboratoryjne i projektowe - wersja β 1 Laboratorium Dwa problemy do wyboru (jeden do realizacji). 1. Water Jug Problem, 2. Wieże Hanoi. Water Jug Problem Ograniczenia dla każdej z wersji: pojemniki
Zadania laboratoryjne i projektowe - wersja β 1 Laboratorium Dwa problemy do wyboru (jeden do realizacji). 1. Water Jug Problem, 2. Wieże Hanoi. Water Jug Problem Ograniczenia dla każdej z wersji: pojemniki
Zadanie transportowe i problem komiwojażera. Tadeusz Trzaskalik
 Zadanie transportowe i problem komiwojażera Tadeusz Trzaskalik 3.. Wprowadzenie Słowa kluczowe Zbilansowane zadanie transportowe Rozwiązanie początkowe Metoda minimalnego elementu macierzy kosztów Metoda
Zadanie transportowe i problem komiwojażera Tadeusz Trzaskalik 3.. Wprowadzenie Słowa kluczowe Zbilansowane zadanie transportowe Rozwiązanie początkowe Metoda minimalnego elementu macierzy kosztów Metoda
1 Równania nieliniowe
 1 Równania nieliniowe 1.1 Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym jest numeryczne poszukiwanie rozwiązań równań nieliniowych, np. algebraicznych (wielomiany),
1 Równania nieliniowe 1.1 Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym jest numeryczne poszukiwanie rozwiązań równań nieliniowych, np. algebraicznych (wielomiany),
Algorytmy stochastyczne, wykład 02 Algorytmy genetyczne
 Algorytmy stochastyczne, wykład 02 Algorytmy genetyczne J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 2014-02-27 1 Mutacje algorytmu genetycznego 2 Dziedzina niewypukła abstrakcyjna
Algorytmy stochastyczne, wykład 02 Algorytmy genetyczne J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 2014-02-27 1 Mutacje algorytmu genetycznego 2 Dziedzina niewypukła abstrakcyjna
Układy równań nieliniowych (wielowymiarowa metoda Newtona-Raphsona) f(x) = 0, gdzie. dla n=2 np.
 f(x) = 0, gdzie. dla n=2 np.") Układy równań nieliniowych (wielowymiarowa metoda Newtona-Raphsona f(x 0, f ( f, f,..., f n gdzie 2 x ( x, x 2,..., x n dla n2 np. f ( x, y 0 g( x, y 0 dla każdej wielowymiarowej rozwinięcie w szereg Taylora
Układy równań nieliniowych (wielowymiarowa metoda Newtona-Raphsona f(x 0, f ( f, f,..., f n gdzie 2 x ( x, x 2,..., x n dla n2 np. f ( x, y 0 g( x, y 0 dla każdej wielowymiarowej rozwinięcie w szereg Taylora
Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: Badania operacyjne
 Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: Badania operacyjne Temat ćwiczenia: Komputerowe wspomaganie rozwiązywania zadań programowania nieliniowego Zachodniopomorski Uniwersytet Technologiczny
Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: Badania operacyjne Temat ćwiczenia: Komputerowe wspomaganie rozwiązywania zadań programowania nieliniowego Zachodniopomorski Uniwersytet Technologiczny
Optymalizacja optymalizacji
 7 maja 2008 Wstęp Optymalizacja lokalna Optymalizacja globalna Algorytmy genetyczne Badane czasteczki Wykorzystane oprogramowanie (Algorytm genetyczny) 2 Sieć neuronowa Pochodne met-enkefaliny Optymalizacja
7 maja 2008 Wstęp Optymalizacja lokalna Optymalizacja globalna Algorytmy genetyczne Badane czasteczki Wykorzystane oprogramowanie (Algorytm genetyczny) 2 Sieć neuronowa Pochodne met-enkefaliny Optymalizacja
Automatyka i Robotyka II Stopień ogólno akademicki studia niestacjonarne wszystkie Katedra Automatyki i Robotyki Prof. dr hab. inż.
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
WYNIKI REALIZOWANYCH PROJEKTÓW BADAWCZYCH
 PROPONOWANA TEMATYKA WSPÓŁPRACY prof. dr hab. inż. WOJCIECH KACALAK WYNIKI REALIZOWANYCH PROJEKTÓW BADAWCZYCH 00:00:00 --:-- --.--.---- 1 111 PROPOZYCJE PROPOZYCJE DO WSPÓŁPRACY Z PRZEMYSŁEM W ZAKRESIE
PROPONOWANA TEMATYKA WSPÓŁPRACY prof. dr hab. inż. WOJCIECH KACALAK WYNIKI REALIZOWANYCH PROJEKTÓW BADAWCZYCH 00:00:00 --:-- --.--.---- 1 111 PROPOZYCJE PROPOZYCJE DO WSPÓŁPRACY Z PRZEMYSŁEM W ZAKRESIE
Spis treści Przedmowa
 Spis treści Przedmowa 1. Wprowadzenie do problematyki konstruowania - Marek Dietrich (p. 1.1, 1.2), Włodzimierz Ozimowski (p. 1.3 -i-1.7), Jacek Stupnicki (p. l.8) 1.1. Proces konstruowania 1.2. Kryteria
Spis treści Przedmowa 1. Wprowadzenie do problematyki konstruowania - Marek Dietrich (p. 1.1, 1.2), Włodzimierz Ozimowski (p. 1.3 -i-1.7), Jacek Stupnicki (p. l.8) 1.1. Proces konstruowania 1.2. Kryteria
Standardowe zadanie programowania liniowego. Gliwice 1
 Standardowe zadanie programowania liniowego 1 Standardowe zadanie programowania liniowego Rozważamy proces, w którym zmiennymi są x 1, x 2,, x n. Proces poddany jest m ograniczeniom, zapisanymi w postaci
Standardowe zadanie programowania liniowego 1 Standardowe zadanie programowania liniowego Rozważamy proces, w którym zmiennymi są x 1, x 2,, x n. Proces poddany jest m ograniczeniom, zapisanymi w postaci
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Laboratorium MATLAB Zadanie nr 2 Detekcja twarzy autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się algorytmem gradientu prostego
Metody systemowe i decyzyjne w informatyce Laboratorium MATLAB Zadanie nr 2 Detekcja twarzy autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się algorytmem gradientu prostego
Algorytmy genetyczne
 Algorytmy genetyczne Motto: Zamiast pracowicie poszukiwać najlepszego rozwiązania problemu informatycznego lepiej pozwolić, żeby komputer sam sobie to rozwiązanie wyhodował! Algorytmy genetyczne służą
Algorytmy genetyczne Motto: Zamiast pracowicie poszukiwać najlepszego rozwiązania problemu informatycznego lepiej pozwolić, żeby komputer sam sobie to rozwiązanie wyhodował! Algorytmy genetyczne służą
Definicja problemu programowania matematycznego
 Definicja problemu programowania matematycznego minimalizacja lub maksymalizacja funkcji min (max) f(x) gdzie: x 1 x R n x 2, czyli: x = [ ] x n przy ograniczeniach (w skrócie: p.o.) p.o. g i (x) = b i
Definicja problemu programowania matematycznego minimalizacja lub maksymalizacja funkcji min (max) f(x) gdzie: x 1 x R n x 2, czyli: x = [ ] x n przy ograniczeniach (w skrócie: p.o.) p.o. g i (x) = b i
Wielokryterialne harmonogramowanie portfela projektów. Bogumiła Krzeszowska Katedra Badań Operacyjnych
 Wielokryterialne harmonogramowanie portfela projektów Bogumiła Krzeszowska Katedra Badań Operacyjnych Problem Należy utworzyć harmonogram portfela projektów. Poprzez harmonogram portfela projektów będziemy
Wielokryterialne harmonogramowanie portfela projektów Bogumiła Krzeszowska Katedra Badań Operacyjnych Problem Należy utworzyć harmonogram portfela projektów. Poprzez harmonogram portfela projektów będziemy
TECHNOLOGIA MASZYN. Wykład dr inż. A. Kampa
 TECHNOLOGIA MASZYN Wykład dr inż. A. Kampa Technologia - nauka o procesach wytwarzania lub przetwarzania, półwyrobów i wyrobów. - technologia maszyn, obejmuje metody kształtowania materiałów, połączone
TECHNOLOGIA MASZYN Wykład dr inż. A. Kampa Technologia - nauka o procesach wytwarzania lub przetwarzania, półwyrobów i wyrobów. - technologia maszyn, obejmuje metody kształtowania materiałów, połączone
Spis treści. Przedmowa 11
 Podstawy konstrukcji maszyn. T. 1 / autorzy: Marek Dietrich, Stanisław Kocańda, Bohdan Korytkowski, Włodzimierz Ozimowski, Jacek Stupnicki, Tadeusz Szopa ; pod redakcją Marka Dietricha. wyd. 3, 2 dodr.
Podstawy konstrukcji maszyn. T. 1 / autorzy: Marek Dietrich, Stanisław Kocańda, Bohdan Korytkowski, Włodzimierz Ozimowski, Jacek Stupnicki, Tadeusz Szopa ; pod redakcją Marka Dietricha. wyd. 3, 2 dodr.
LABORATORIUM 2: Wpływ wielkości populacji i liczby pokoleń na skuteczność poszukiwań AE. opracował: dr inż. Witold Beluch
 OBLICZENIA EWOLUCYJNE LABORATORIUM 2: Wpływ wielkości populacji i liczby pokoleń na skuteczność poszukiwań AE opracował: dr inż. Witold Beluch witold.beluch@polsl.pl Gliwice 12 OBLICZENIA EWOLUCYJNE LABORATORIUM
OBLICZENIA EWOLUCYJNE LABORATORIUM 2: Wpływ wielkości populacji i liczby pokoleń na skuteczność poszukiwań AE opracował: dr inż. Witold Beluch witold.beluch@polsl.pl Gliwice 12 OBLICZENIA EWOLUCYJNE LABORATORIUM
Rachunek Prawdopodobieństwa i Statystyka
 Rachunek Prawdopodobieństwa i Statystyka W 2. Probabilistyczne modele danych Zmienne losowe. Rozkład prawdopodobieństwa i dystrybuanta. Wartość oczekiwana i wariancja zmiennej losowej Dr Anna ADRIAN Zmienne
Rachunek Prawdopodobieństwa i Statystyka W 2. Probabilistyczne modele danych Zmienne losowe. Rozkład prawdopodobieństwa i dystrybuanta. Wartość oczekiwana i wariancja zmiennej losowej Dr Anna ADRIAN Zmienne
Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa. P. F. Góra
 Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Uwarunkowanie zadania numerycznego Niech ϕ : R n R m będzie pewna funkcja odpowiednio wiele
Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Uwarunkowanie zadania numerycznego Niech ϕ : R n R m będzie pewna funkcja odpowiednio wiele
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Struktury i Algorytmy Wspomagania Decyzji Zapoznanie z narzędziami optymalizacyjnymi w środowisku MATLAB
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Struktury i Algorytmy Wspomagania Decyzji Zapoznanie z narzędziami optymalizacyjnymi w środowisku MATLAB
SZTUCZNA INTELIGENCJA
 SZTUCZNA INTELIGENCJA WYKŁAD 13. PROBLEMY OPTYMALIZACYJNE Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska PROBLEMY OPTYMALIZACYJNE Optymalizacja poszukiwanie
SZTUCZNA INTELIGENCJA WYKŁAD 13. PROBLEMY OPTYMALIZACYJNE Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska PROBLEMY OPTYMALIZACYJNE Optymalizacja poszukiwanie
[ P ] T PODSTAWY I ZASTOSOWANIA INŻYNIERSKIE MES. [ u v u v u v ] T. wykład 4. Element trójkątny płaski stan (naprężenia lub odkształcenia)
![[ P ] T PODSTAWY I ZASTOSOWANIA INŻYNIERSKIE MES. [ u v u v u v ] T. wykład 4. Element trójkątny płaski stan (naprężenia lub odkształcenia)](/thumbs/88/115575588.jpg "[ P ] T PODSTAWY I ZASTOSOWANIA INŻYNIERSKIE MES. [ u v u v u v ] T. wykład 4. Element trójkątny płaski stan (naprężenia lub odkształcenia)") PODSTAWY I ZASTOSOWANIA INŻYNIERSKIE MES wykład 4 Element trójkątny płaski stan (naprężenia lub odkształcenia) Obszar zdyskretyzowany trójkątami U = [ u v u v u v ] T stopnie swobody elementu P = [ P ]
PODSTAWY I ZASTOSOWANIA INŻYNIERSKIE MES wykład 4 Element trójkątny płaski stan (naprężenia lub odkształcenia) Obszar zdyskretyzowany trójkątami U = [ u v u v u v ] T stopnie swobody elementu P = [ P ]
Liczby zmiennoprzecinkowe i błędy
 i błędy Elementy metod numerycznych i błędy Kontakt pokój B3-10 tel.: 829 53 62 http://golinski.faculty.wmi.amu.edu.pl/ golinski@amu.edu.pl i błędy Plan wykładu 1 i błędy Plan wykładu 1 2 i błędy Plan
i błędy Elementy metod numerycznych i błędy Kontakt pokój B3-10 tel.: 829 53 62 http://golinski.faculty.wmi.amu.edu.pl/ golinski@amu.edu.pl i błędy Plan wykładu 1 i błędy Plan wykładu 1 2 i błędy Plan
Programowanie liniowe
 Badania operacyjne Problem Model matematyczny Metoda rozwiązania Znaleźć optymalny program produkcji. Zmaksymalizować 1 +3 2 2 3 (1) Przy ograniczeniach 3 1 2 +2 3 7 (2) 2 1 +4 2 12 (3) 4 1 +3 2 +8 3 10
Badania operacyjne Problem Model matematyczny Metoda rozwiązania Znaleźć optymalny program produkcji. Zmaksymalizować 1 +3 2 2 3 (1) Przy ograniczeniach 3 1 2 +2 3 7 (2) 2 1 +4 2 12 (3) 4 1 +3 2 +8 3 10
Wstęp do metod numerycznych 9a. Układy równań algebraicznych. P. F. Góra
 Wstęp do metod numerycznych 9a. Układy równań algebraicznych P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Układy równań algebraicznych Niech g:r N równanie R N będzie funkcja klasy co najmniej
Wstęp do metod numerycznych 9a. Układy równań algebraicznych P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Układy równań algebraicznych Niech g:r N równanie R N będzie funkcja klasy co najmniej
Algorytmy ewolucyjne Część II
 Wydział Zarządzania AGH Katedra Informatyki Stosowanej Algorytmy ewolucyjne Część II Metaheurystyki Treść wykładu Zastosowania Praktyczne aspekty GA Reprezentacja Funkcja dopasowania Zróżnicowanie dopasowania
Wydział Zarządzania AGH Katedra Informatyki Stosowanej Algorytmy ewolucyjne Część II Metaheurystyki Treść wykładu Zastosowania Praktyczne aspekty GA Reprezentacja Funkcja dopasowania Zróżnicowanie dopasowania
Elementy Modelowania Matematycznego
 Elementy Modelowania Matematycznego Wykład 6 Metoda simpleks Spis treści Wstęp Zadanie programowania liniowego Wstęp Omówimy algorytm simpleksowy, inaczej metodę simpleks(ów). Jest to stosowana w matematyce
Elementy Modelowania Matematycznego Wykład 6 Metoda simpleks Spis treści Wstęp Zadanie programowania liniowego Wstęp Omówimy algorytm simpleksowy, inaczej metodę simpleks(ów). Jest to stosowana w matematyce
Optymalizacja ciągła
 Optymalizacja ciągła 4. Metody kierunków poprawy (metoda spadku wzdłuż gradientu) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 21.03.2019 1 / 41 Plan wykładu Minimalizacja
Optymalizacja ciągła 4. Metody kierunków poprawy (metoda spadku wzdłuż gradientu) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 21.03.2019 1 / 41 Plan wykładu Minimalizacja
LABORATORIUM 1: Program Evolutionary Algorithms
 Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny, Politechnika Śląska www.imio.polsl.pl OBLICZENIA EWOLUCYJNE LABORATORIUM 1: Program Evolutionary Algorithms opracował:
Instytut Mechaniki i Inżynierii Obliczeniowej Wydział Mechaniczny Technologiczny, Politechnika Śląska www.imio.polsl.pl OBLICZENIA EWOLUCYJNE LABORATORIUM 1: Program Evolutionary Algorithms opracował:
INTERPOLACJA I APROKSYMACJA FUNKCJI
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Obliczenia Naukowe. Wykład 12: Zagadnienia na egzamin. Bartek Wilczyński
 Obliczenia Naukowe Wykład 12: Zagadnienia na egzamin Bartek Wilczyński 6.6.2016 Tematy do powtórki Arytmetyka komputerów Jak wygląda reprezentacja liczb w arytmetyce komputerowej w zapisie cecha+mantysa
Obliczenia Naukowe Wykład 12: Zagadnienia na egzamin Bartek Wilczyński 6.6.2016 Tematy do powtórki Arytmetyka komputerów Jak wygląda reprezentacja liczb w arytmetyce komputerowej w zapisie cecha+mantysa
MODUŁ 3. WYMAGANIA EGZAMINACYJNE Z PRZYKŁADAMI ZADAŃ
 MODUŁ 3. WYMAGANIA EGZAMINACYJNE Z PRZYKŁADAMI ZADAŃ 2. Przykład zadania do części praktycznej egzaminu dla wybranych umiejętności z kwalifikacji M.44. Organizacja i nadzorowanie procesów produkcji maszyn
MODUŁ 3. WYMAGANIA EGZAMINACYJNE Z PRZYKŁADAMI ZADAŃ 2. Przykład zadania do części praktycznej egzaminu dla wybranych umiejętności z kwalifikacji M.44. Organizacja i nadzorowanie procesów produkcji maszyn
Wstęp do metod numerycznych Zadania numeryczne 2016/17 1
 Wstęp do metod numerycznych Zadania numeryczne /7 Warunkiem koniecznym (nie wystarczającym) uzyskania zaliczenia jest rozwiązanie co najmniej 3 z poniższych zadań, przy czym zadania oznaczone literą O
Wstęp do metod numerycznych Zadania numeryczne /7 Warunkiem koniecznym (nie wystarczającym) uzyskania zaliczenia jest rozwiązanie co najmniej 3 z poniższych zadań, przy czym zadania oznaczone literą O
ZASTOSOWANIE METOD OPTYMALIZACJI W DOBORZE CECH GEOMETRYCZNYCH KARBU ODCIĄŻAJĄCEGO
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 43-48, Gliwice 2010 ZASTOSOWANIE METOD OPTYMALIZACJI W DOBORZE CECH GEOMETRYCZNYCH KARBU ODCIĄŻAJĄCEGO TOMASZ CZAPLA, MARIUSZ PAWLAK Katedra Mechaniki Stosowanej,
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 43-48, Gliwice 2010 ZASTOSOWANIE METOD OPTYMALIZACJI W DOBORZE CECH GEOMETRYCZNYCH KARBU ODCIĄŻAJĄCEGO TOMASZ CZAPLA, MARIUSZ PAWLAK Katedra Mechaniki Stosowanej,
Algorytmy stochastyczne, wykład 01 Podstawowy algorytm genetyczny
 Algorytmy stochastyczne, wykład 01 J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 2014-02-21 In memoriam prof. dr hab. Tomasz Schreiber (1975-2010) 1 2 3 Różne Orientacyjny
Algorytmy stochastyczne, wykład 01 J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 2014-02-21 In memoriam prof. dr hab. Tomasz Schreiber (1975-2010) 1 2 3 Różne Orientacyjny
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki