Wybrane zagadnienia z nawigacji. dla kandydatów na STERNIKÓW JACHTOWYCH
|
|
|
- Janina Czajka
- 9 lat temu
- Przeglądów:
Transkrypt
1 Wybrane zagadnienia z nawigacji dla kandydatów na STERNIKÓW JACHTOWYCH opracowa³ PAWE BURKHARD

2 Siatka geograficzna Oœ Ziemi - œrednica Ziemi, wokó³ której obraca siê ona w swoim ruchu wirowym. Bieguny - koñce osi obrotu Ziemi na jej powierzchni wyznaczaj¹ce punkty zwane biegunami ziemskimi - pó³nocny i po³udniowy. Równik - œlad na powierzchni kuli ziemskiej powsta³y na skutek przeciêcia jei p³aszczyzn¹ prostopad³¹ do osi obrotu Ziemi i przechodz¹c¹ przez jej œrodek dzieli on Ziemiê na dwie pó³kule: pó³nocn¹ i po³udniow¹. Po³udnik ziemski - po³owa obwodu ko³a wielkiego zawarta pomiêdzy dwoma biegunami. Równole nik ziemski - ko³o ma³e powstaje jako œlad przeciêcia powierzchni kuli ziemskiej p³aszczyzn¹ prostopad³¹ do osi obrotu Ziemi; p³aszczyzna ta jest równoleg³a do p³aszczyzny równika. Po³udnik zerowy - po³udnik przechodz¹cy przez obserwatorium astronomiczne w Greenwich - dzielnica Londynu; dzieli on Ziemiê na dwie pó³kule: wschodni¹ i zachodni¹. Na powierzchni Ziemi moim przeprowadziæ nieskoñczon¹ liczbê po³udników i równole ników. Je eli na powierzchni Ziemi poprowadzimy, w okreœlonych od siebie odstêpach po³udniki i równole niki ziemskie, to otrzymamy siatkê linii przecinaj¹cych siê pod k¹tem prostym. Siatka ta nosi nazwê siatki wspó³rzêdnych geograficznych. Po³o enie dowolnego punktu P na powierzchni Ziemi okreœlamy za pomoc¹ wspó³rzêdnych geograficznych. Osiami uk³adu wspó³rzêdnych s¹: równik i po³udnik zerowy. Wspó³rzêdnymi tego uk³adu s¹ szerokoœæ i d³ugoœæ geograficzna.

3 Szerokoœæ geograficzna ϕ jest to k¹t œrodkowy zawarty pomiêdzy p³aszczyzn¹ równika a prost¹ ³¹cz¹c¹ œrodek Ziemi (0) z równole nikiem pozycji punktu (P); inaczej, jest to d³ugoœæ ³uku po³udnika przechodz¹cego przez punkt (P). Szerokoœæ geograficzn¹ mierzymy od równika w kierunku pó³nocnym i po³udniowym w zakresie od 00 (równik) do 90 (biegun). Szerokoœæ geograficzn¹ zapisujemy z dok³danoœci¹ do czêœci dziesiêtnych minuty w formacie ss mm,d' Z; gdzie: ss - iloœæ stopni (je eli jest mniej ni 10 to zapisujemy z prefiksem 0 np 09 ); mm - iloœæ minut (je eli jest mniej ni 10 to zapisujemy z prefiksem 0 np 09'); d - iloœæ dziesiêtnych czêœci minuty; Z - znak. Szerokoœæ pó³nocn¹ zapisujemy ze znakiem algebraicznym dodatnim +, lub symbolem N (North). ϕ=+54 30,5' = 50 30,5'N Szerokoœæ po³udniow¹ zapisujemy ze znakiem algebraicznym ujemnym - lub symbolem S (South): ϕ=-54 30,5' = 50 30,5'S Wszystkie punkty znajduj¹ce siê na tym samym równole niku maj¹ tê sam¹ szerokoœæ geograficzn¹. D³ugoœæ geograficzna λ jest to k¹t dwuœcienny zawarty pomiêdzy p³aszczyzn¹ po³udnika zerowego i p³aszczyzn¹ po³udnika pozycji punktu (P); inaczej, jest to d³ugoœæ ³uku równika zawarta pomiêdzy po³udnikiem zero-wym a po³udnikiem pozycji (P). D³ugoœæ geograficzn¹ mierzymy od po³udnika zerowego na wschód i na zachód w zakresie od 000 do 180. D³ugoœæ geograficzn¹ zapisujemy z dok³danoœci¹ do czêœci dziesiêtnych minuty w formacie sss mm,d' Z; gdzie: sss - iloœæ stopni (je eli jest mniej ni 10 to zapisujemy z prefiksem 00 np 009, je eli jest mniej ni 100 to zapisujemy z prefikem 0 np 015 ); mm - iloœæ minut (je eli jest mniej ni 10 to zapisujemy z prefiksem 0 np 09'); d - iloœæ dziesiêtnych czêœci minuty; Z - znak. D³ugoœæ wschodni¹ zapisujemy ze znakiem algebraicznym dodatnim + lub symbolem E (East): λ= ,5'=018 20,5' E D³ugoœæ geograficzn¹ zachodni¹ zapisujemy ze znakiem algebraicznym ujemnym - lub symbolem W (West):. λ= ,5'=018 20,5' W Wszystkie punkty znajduj¹ce siê na tym samym po³udniku maj¹ tê sam¹ d³ugoœæ geograficzn¹.
; d - iloœæ dziesiêtnych czêœci minuty; Z - znak.")
4 Odczyt wspó³rzêdnych pozycji z mapy morskiej

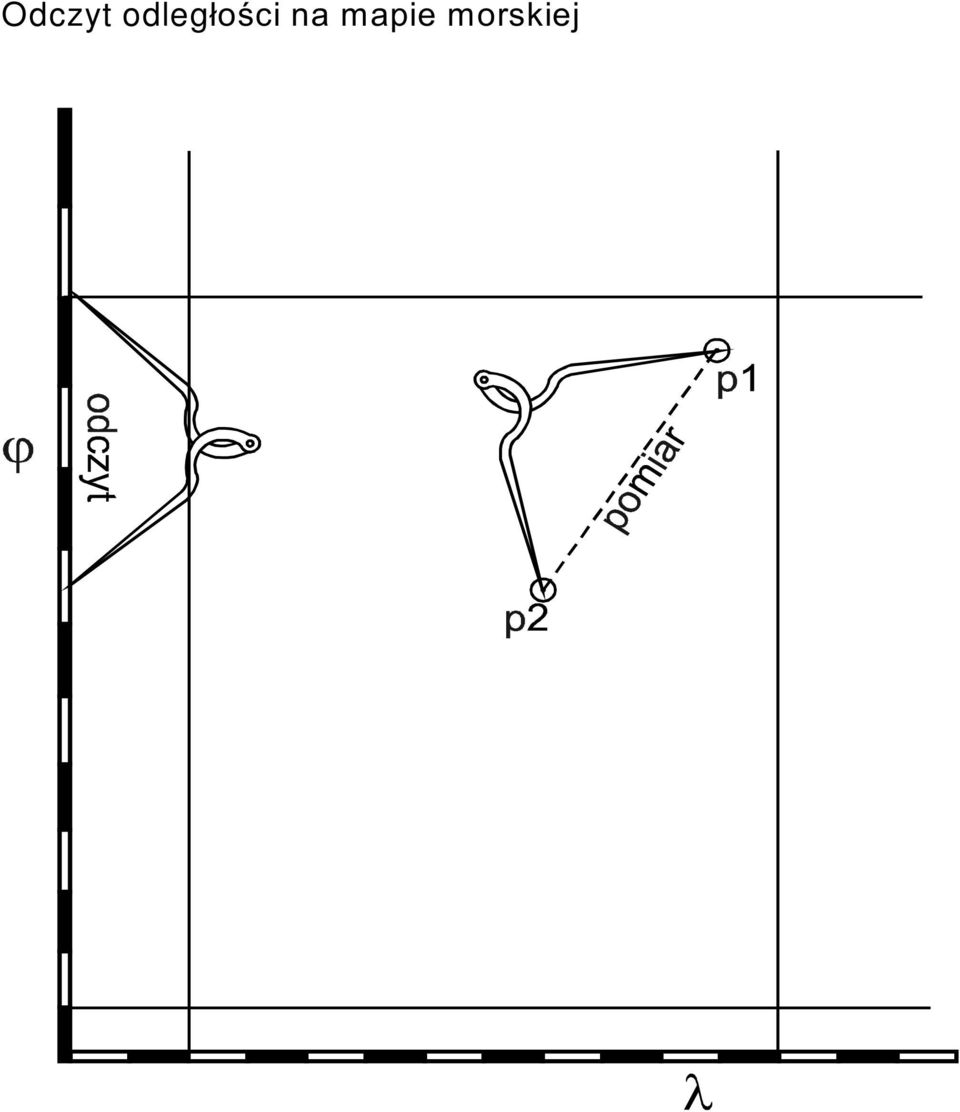
5 Jednostki miary stosowane w nawigacji Podstawow¹ jednostk¹ odleg³oœci stosowan¹ w nawigacji jest mila morska (Mm). jedna mila morska jest równa d³ugoœci jednej minuty k¹towej równika. Mila morska dzieli siê na 10 kabli (kbl) 1 Mm = 1852,4 m 1 kbl = 1 Mm/10 = 185,4 m Jednostk¹ prêdkoœci w nawigacji jest wêze³ (w). jacht porusza siê z prêdkoœci¹ 1 w je eli w ci¹gu jednej godziny przebywa 1 Mm. 1 w = 1 Mm/h Kierunek na morzu jest to linia prosta przechodz¹ca przez punkt w którym znajduje siê obserwator i punkt ku któremu p³ynie jacht (b¹dÿ znajduje siê namierzany obiekt). Kierunek ten okreœla siê za pomoc¹ k¹ta, jaki tworzy ta linia z pó³nocn¹ czêœci¹ linii Pó³noc - Po³udnie. Kierunek oznacza siê za pomoc¹ stopni lub rumbów. Horyzont (360 ) podzielony zosta³ na 32 rumby po 11,25 ka dy. Ka dy rumb ma swoj¹ nazwê (rysunek i tabela). Nr rumbu Nazwa Iloœæ stopni Nr rumbu Nazwa Iloœæ stopni 0 N 0 16 S NbE 11,25 17 SbW 191,25 2 NNE 22,5 18 SSW 202,5 3 NEbN 33,75 19 SWbS 213,75 4 NE SW NEbE 56,25 21 SWbW 236,25 6 ENE 67,5 22 WSW 247,5 7 EbN 78,75 23 WbS 258,75 8 E W EbS 101,25 25 WbN 281,25 10 ESE 112,5 26 WNW 292,5 11 SEbE 123,75 27 NWbW 303,75 12 SE NW SEbS 146,25 29 NWbN 326,25 14 SSE 157,5 30 NNW 337,5 15 SbE 168,75 31 NbW 348,75
.")
6 Obecnie rumbów okreœla siê tylko do okreœlania kierunku, z którego wieje wiatr i do przybli onego okreœlania kierunku. We wspó³czesne nawigacji stosuje siê system okrê ny (pe³ny) okreœlania kierunku. W systemie tym liczymy k¹ty od N=000 zgodnie z ruchem wskazówek zegara (N=000, E=090, S=180, W=270, n=360 ). Wszystkie kierunki zapisujemy w postaci trzycyfrowej, natomiast czêœci stopnia wyra amy w postaci u³amka dziesiêtnego (np. 358,5 ; 045,0 ; 001,9 ). System pó³okrê ny (po³ówkowy) polega na liczeniu kierunku od pó³nocy (N=000 ) do po³udnia (S=180 ) na wschód (E) lub na zachód (W). Zapis kierunku w tym systemie obejmuje wartoœæ liczbow¹ k¹ta w stopniach, oraz wskazanie strony w któr¹ liczymy (E lub W) (np 125 E, 125 W).
.")
7 Odczyt odleg³oœci na mapie morskiej
8 Kurs i namiar rzeczywisty, k¹t kursowy W nawigacji morskiej stosuje siê kilka specyficznych definicji kierunku. Zasadnicze z nich to kurs rzeczywisty, namiar rzeczywisty oraz k¹t kursowy. Kurs rzeczywisty (KR) - jest to k¹t zawarty pomi-dzy pó³nocn¹ czêœci¹ po³udnika rzeczywistego, a lini¹ kursu jachtu. Namiar rzeczywisty (NR) - jest to k¹t pó³nocn¹ czêœci¹ p³aszczyzny po³udnika rzeczywistego a lini¹ przechodz¹c¹ przez pozycjê obserwatora i namierzany obiekt. Kursy i namiary rzeczywiste wyra amy najczêœciej w okrê nym systemie podzia³u horyzontu i zapisujemy liczb¹ trzycyfrow¹ KR = 043,2 ; NR = 015 ; KR = 179 ; NR = 297. Czêsto wystêpuj¹ sytuacje, w których kierunek na widoczny obiekt wyra amy w stosunku do osi symetrii jachtu, a nie w stosunku do p³a-szczyzny po³udnika. Mamy wtedy do czynienia z k¹tem kursowym (KK). K¹t kursowy (KK) - jest to k¹t zawarty miêdzy dziobow¹ czêœci¹ p³aszczyzny symetrii okrêtu a lini¹ namiaru na widoczny obiekt. K¹ty kursowe wyra amy w po³ówkowym lub okrê nym systemie podzia³u horyzontu, przyjmuj¹c zawsze zero na dziobie jachtu a 180 na rufie. W systemie po³ówkowym k¹ty kursowe liczymy w prawo i w lewo od dziobu jachtu do rufy, przy czym k¹ty kursowe lewej burty maj¹ znak ujemny (-), a k¹ty kursowe prawej burty maj¹ znak dodatni (+). W systemie okrê nym k¹ty kursowe mierzymy od dziobu w prawo, zgodnie z ruchem wskazówki zegara. K¹ty kursowe równe 90 prawej i lewej burty nazywamy trawersami. Zapis k¹tów kursowych jest nastêpuj¹cy: <K = 30 lb (lewej burty) = -30 = 330 <K = 170 pb (prawej burty) = +170 = 170 Wzajemne zale noœci miêdzy kursem rzeczywistym, namiarem rzeczywistym i k¹tem kursowym s¹ wyra ane nastêpuj¹cymi wzorami: KR=NR-(±<K) NR=KR+(±<K) <K=NR-KR

9 N RZ -pó³noc rzeczywista LK-linia kursu LN-linia namiaru KR-kurs rzeczywisty NR-namiar rzeczywisty <K-k¹t kursowy Ogóle zasady budowy kompasów i namierników Jednym z najwa niejszych jachtowych przyrz¹dów nawigacyjnych jest kompas s³u ¹cy do okreœlania kierunku na morzu. Wskazuje on kurs jachtu oraz umo liwia okreœlenie namiarów lub k¹tów kursowych na widoczne jachtu przedmioty i znaki nawigacyjne. Kompas magnetyczny jest zbudowany na zasadzie ustawiania siê ig³y magnetycznej równolegle do linii si³ pola magnetycznego Ziemi. Podstawow¹ czêœci¹ ka dego kompasu jest ró a kompasowa. Sk³ada siê ona z szeregu magnesów umieszczonych równolegle wzglêdem siebie i przymocowanych do ró y wiatrów. Ró a kompasowa spe³nia rolê p³aszczyzny horyzontu obserwatora. Wyskalowana jest w okrê nym systemie podzia³u kierunku, tj. od 000 do 360 i zawieszona tak, aby œrednica ró y, ³¹cz¹ca punkty na jej obwodzie oznaczone 000 i 180, pokrywa³a siê z kierunkiem osi magnetycznej ró y kompasowej. Ró a kompasowa swoim œrodkiem ciê koœci spoczywa na ostrzu szpilki w kocio³ku, wykonanym z amagnetycznego metalu zazwyczaj z mosi¹dzu, maj¹c mo liwoœæ swobodnego obrotu w p³aszczyÿnie poziomej. Pod wp³ywem pola magnetycznego otaczaj¹cego ró ê kompasow¹ ustawia siê ona równolegle do linii magnetycznej tego pola. Na jachcie, na ró ê kompasow¹ dzia³a dodatkowo pole magnetyczne jachtu. Pod wspólnym dzia³aniem pola magnetycznego Ziemi i jachtu ró a kompasowa bêdzie zajmowa³a po³o enie wypadkowe. Na górnej krawêdzi kocio³ka przytwierdzony jest w formie mosiê nego pierœcienia kr¹g kursowy, na którym umieszczona jest podzia³ka stopniowa. Wartoœæ podzia³ki równa 0 pokrywa siê z kresk¹ kursow¹ od strony dziobu. Kr¹g kursowy, zwany równie azymutalnym, s³u y do okreœlania kierunków (k¹tów kursowych) wzglêdem kursu jachtu. Kocio³ek kompasu jest podwieszony w górnej czêœci szafki na systemie pierœcieni Cardana. Tego rodzaju podwieszenie umo liwia sta³e, poziome ustawienie ró y, niezale nie od przechy³ów jachtu. W celu zwiêkszenia statecznoœci kocio³ka do jego dna przymocowany jest specjalny ciê ar.

10 Nieod³¹czn¹ czêœci¹ ka dego kompasu jest namiernik, który s³u y do okreœlania kierunków na przedmioty widziane z jachtu. Namierniki dziel¹ siê na: - przeziernikowe, - pryzmatowe, - lunetowe. Wykonane s¹ z materia³ów amagnetycznych i dostosowane do okreœlonego typu kompasu. Punkt obrotu namiernika powinien byæ zgodny z punktem obrotu ró y kompasowej. Namiernik nie mo e powodowaæ przechy³ów kompasu. Ka dy namiernik, niezale nie od konstrukcji, posiada te same czêœci zasadnicze, tj. ramkê, okular i obiektyw, ewentualnie przeziernik lub prêt i "w³os" oraz pryzmat do odczytywania wartoœci namiaru na ró y. Namierzaj¹c jakiœ przedmiot, nale y ustawiæ namiernik w ten sposób, by okular lub przeziernik znajdowa³ siê od strony obserwatora, a prêt lub w³os namiernika pokrywa³ siê w przezierniku z obserwowanym przedmiotem. Magnetyzm ziemski - deklinacja magnetyczna Budowa kompasu 1- kocio³ek 2-ró a kompasowa 3-magnesy 4-zespó³ oœ-³o ysko 5-szyba 6-membrana 7-ciê ar o³owiany 8-korek 9-oœ zawieszenia Swobodnie zawieszona w swoim œrodku ciê koœci ig³a magnetyczna usta-wi siê po pewnym okresie wahañ w jednym kierunku. Z zachowania siê jej na powierzchni Ziemi wynika, e wokó³ Ziemi istnieje pole magnetyczne, które przyci¹ga i odpycha odpowiednie bieguny ig³y. Biegun ig³y magnetycznej zwracaj¹cy siê mniej wiêcej w kierunku bieguna pó³nocnego Ziemi nazywamy biegunem pó³nocnym magnesu Nm lub "+" i zwykle oznaczamy go kolorem czerwonym, a biegun przeciwny nazywamy po³udniowym Sm lub "-" i oznaczamy kolorem niebieskim.. Po³o enie biegunów magnetycznych na Ziemi nic jest sta³e. Przemieszczaj¹ siê one wokó³ biegunów geograficznych. W konsekwencji tych ruchów ulega zmianie jeden z elementów charakteryzuj¹cych pole magnetyczne Ziemi, a mianowicie deklinacja magnetyczna. Deklinacja magnetyczna (d) - jest to k¹t le ¹cy na p³aszczyÿnie horyzontu zawarty pomiêdzy pó³nocn¹ czêœci¹ linii N-S rzeczywistej, a wektorem natê enia pola magnetycznego Ziemi. Deklinacjê magnetyczn¹ liczy siê od pó³nocnej czêœci po³udnika rzeczywistego N RZ, na wschód i na zachód od 0 do 180. Deklinacja jest dodatnia, czyli wschodnia, gdy kierunek pó³nocny ig³y magnetycznej jest odchylony na wschód od pó³nocnego kierunku rzeczywistego i ujemna, czyli zachodnia, gdy kierunek pó³nocny ig³y magnetycznej jest odchylony na zachód od N RZ.

11 Deklinacja magnetyczna jest wartoœci¹ zmienn¹, a zmiany jej maj¹ charakter okresowy i przypadkowy. Zmiana roczna deklinacji w stosunku do danego obszaru oraz roku naniesiona jest na wszystkie mapy morskie. Przystêpuj¹c do pracy na mapie morskiej, nale y sprawdziæ, dla którego roku podana jest deklinacja, ile wynosi jej roczna zmiana i w jaki sposób obliczyæ aktualn¹ wartoœæ deklinacji. Poni ej podano kolejnoœæ obliczania deklinacji dla mapy polskiej: - wybieramy wartoœæ deklinacji dla roku wydania mapy (1980 r.) +0,5 - wybieramy zmianê roczn¹ deklinacji: rocznie algebraicznie dodawaæ +0,1, - ustalamy ró nicê lat, jaka up³ynê³a od roku wydania (1980) do roku, w którym rozpoczynamy na danej mapie nawigacjê ( 1999): 19 lat, - obliczamy wartoœæ poprawki deklinacji, mno ¹c ró nicê lat przez zmianê roczn¹: 19 lat * (+0,1 ) = +1,9, - obliczamy aktualn¹ deklinacjê, dodaj¹c poprawkê do wartoœci deklinacji z mapy: +0,5 + 1,9 = 2,4 Poni ej podano kolejnoœæ obliczania deklinacji dla mapy angielskiej: - wybieramy wartoœæ deklinacji dla roku wydania mapy (1987 r.) 1 55' W = -1 55' - wybieramy zmianê roczn¹ deklinacji: (3' W) = -3' - ustalamy ró nicê lat, jaka up³ynê³a od roku wydania (1987) do roku, w którym rozpoczynamy na danej mapie nawigacjê ( 1999): 12 lat, - obliczamy wartoœæ poprawki deklinacji, mno ¹c ró nicê lat przez zmianê roczn¹: 12 lat * (-3 ) = -36' - obliczamy aktualn¹ deklinacjê, dodaj¹c poprawkê do wartoœci deklinacji z mapy: -1,55 + (-36') = -2 31' = 2,5 W Z pojêciem deklinacja magnetyczna wi¹ e siê œciœle pojêcie kursu i namiaru magnetycznego. Kurs magnetyczny (KM) - jest to k¹t zawarty pomiêdzy pó³nocn¹ czêœci¹ linii N-S magnetycznej a dziobow¹ czêœci¹ linii symetrii jachtu; wyra amy go w systemie okrê nym podzia³u horyzontu.

12 Namiar magnetyczny (NM) - jest to k¹t zawarty miêdzy pó³nocn¹ czêœci¹ linii N-S magnetycznej a lini¹ namiaru; wyra amy go równie w systemie okrê nym. Poniewa ró a kompasu magnetycznego wskazuje kierunek pó³nocy magnetycznej, wiêc i kierunki mierzone za jej pomoc¹ bêd¹ magnetyczne, a nie rzeczywiste. Kierunki magnetyczne przeliczamy na kierunki rzeczywiste i odwrotnie, uwzglêdniaj¹c algebraicznie wartoœæ deklinacji magnetycznej d. KM = KR - (±d) KR = KM + (±d) NM=NR-(±d) NR = NM + (±d) N RZ -pó³noc rzeczywista N M -pó³noc magnetyczna d-deklinacja LK-linia kursu LN-linia namiaru KR-kurs rzeczywisty KM-kurs magnetyczny NR-namiar rzeczywisty NM-namiar magnetyczny <K-k¹t kursowy Dewiacja kompasu magnetycznego Ró a kompasowa kompasu magnetycznego stoj¹cego na l¹dzie, z dala od skupisk materia³ów ferromagnetycznych i silnych Ÿróde³ energii elektrycznej, znajduje siê tylko pod wp³ywem si³ pola magnetycznego Ziemi i wskazuje kierunek po³udnika magnetycznego. Ze wzglêdu na to, e kad³uby wspó³czesnych jachtów zbudowane s¹ ze stali, która ulega namagnesowaniu, a wnêtrza ich wype³niaj¹ liczne maszyny elektryczne, tworz¹c pola elektryczne, ca³y jacht wytwarza okreœlone, w³asne pole magnetyczne. Wektor natê enia w³asnego pola magnetycznego jachtu w miejscu ustawienia kompasu magnetycznego na ogó³ nie pokrywa siê z kierunkiem wektora natê enia pola magnetycznego Ziemi. W zwi¹zku z rym, ró a kompasu magnetycznego na jachcie znajduje siê pod wp³ywem dzia³ania wypadkowego pola magnetycznego i nie wskazuje kierunku po³udnika magnetycznego, lecz kierunek po³udnika kompasowego, zwany kierunkiem pó³nocy kompasowej Nk.
 KR = KM + (±d) NM=NR-(±d) NR = NM + (±d) N RZ -pó³noc rzeczywista N M -pó³noc magnetyczna d-deklinacja LK-linia kursu LN-linia namiaru KR-kurs rzeczywisty KM-kurs magnetyczny NR-namiar")
13 Dewiacja (δ) kompasu magnetycznego jest to k¹t zawarty miêdzy pó³nocn¹ czêœci¹ po³udnika magnetycznego i kompasowego. Dewiacja kompasu magnetycznego jest dodatnia (+), gdy po³udnik kompasowy jest odchylony na wschód (w prawo) od po³udnika magnetycznego i ujemna (-), gdy po³udnik kompasowy odchylony jest od niego na zachód (w lewo). Jeœli po³udnik magnetyczny i kompasowy pokrywaj¹ siê, to wartoœæ dewiacji jest równa zeru. Dewiacja mo e osi¹gaæ wartoœæ od 0 do 180. Wartoœæ i znak dewiacji zale y od wartoœci i kierunku dzia³ania wektora natê enia pola magnetycznego jachtu. Zmianê kierunku dzia³ania wektora natê enia pola magnetycznego jachtu, a tym samym zmianê wartoœci dewiacji wywo³uje zmiana kursu jachtu. Dlatego dewiacja zale y od kursu jachtu i zmienia siê wraz z nim. N RZ -pó³noc rzeczywista N K -pó³noc kompasowa δ-dewiacja LK-linia kursu LN-linia namiaru KK-kurs kompasowy KM-kurs magnetyczny NK-namiar kompasowy NM-namiar magnetyczny <K-k¹t kursowy

14 Dewiacja komapsu magnetycznego 4,0 3,0 2,0 1,0 0, ,0-2,0-3,0-4,0 Tabela dewiacji kompasu magnetycznego KK δ KK δ 000 2, , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , ,3

15 Zamiana kursów i namiarów W praktyce zawsze wystêpuje koniecznoœæ zamiany kursu i namiaru kompasowego na rzeczywiste i odwrotnie. KR = KK + (δ+d) NR = NK + (δ+d) KR = KK + (δ+d) NR = NK + (δ+d) Sumê algebraiczn¹ deklinacji i dewiacji nazwano ca³kowit¹ poprawk¹ kompasu magnetycznego (cp), której znak zale y od wyniku dodawania cp = (±δ) + (±d) czyli KR = KK + (±cp) NR = NK + (±cp) KK = KR (±cp) NK = NR (±cp) Podane zale noœci mo na sprowadziæ do schematów zwanych schodkami nawigatora Obliczanie kursu i namiaru kompasowego KR =... NR =... - d =... - d =... KM =... NM =... - δ =... - δ =... KK =... NK =... Obliczanie kursu i namiaru rzeczywistego KK =... NK =... + δ =... + δ =... KM =... NM =... + d =... + d =... KR =... NR =... Jak widaæ zasady obliczania namiarów s¹ podobne do zasad okreœlania kursów. Nale y jednak pamiêtaæ, e wartoœæ dewiacji magnetycznej zale y od aktualnego kursu jachtu, wiêc i ca³kowita poprawka odnosi siê do kursu, a nie do namiaru.

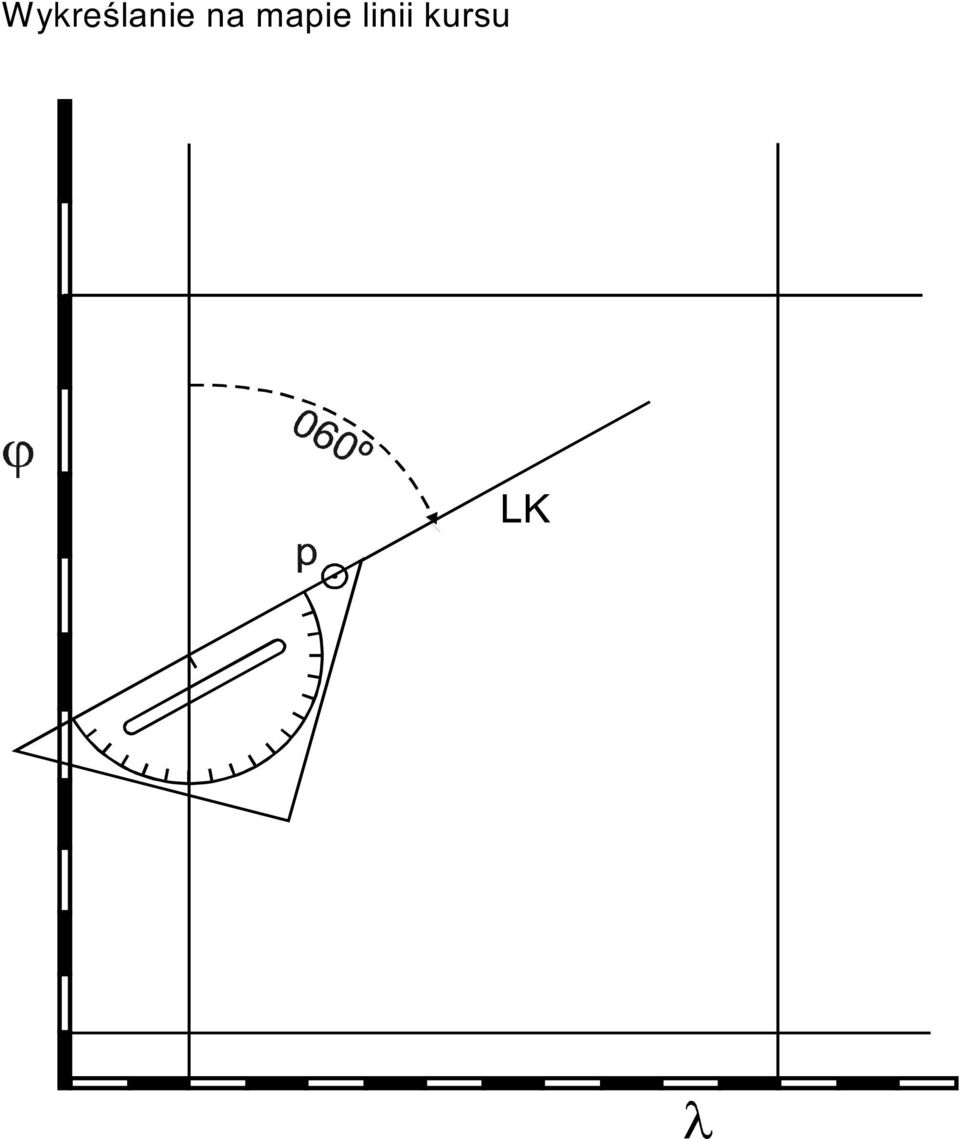
16 Wykreœlanie na mapie linii kursu
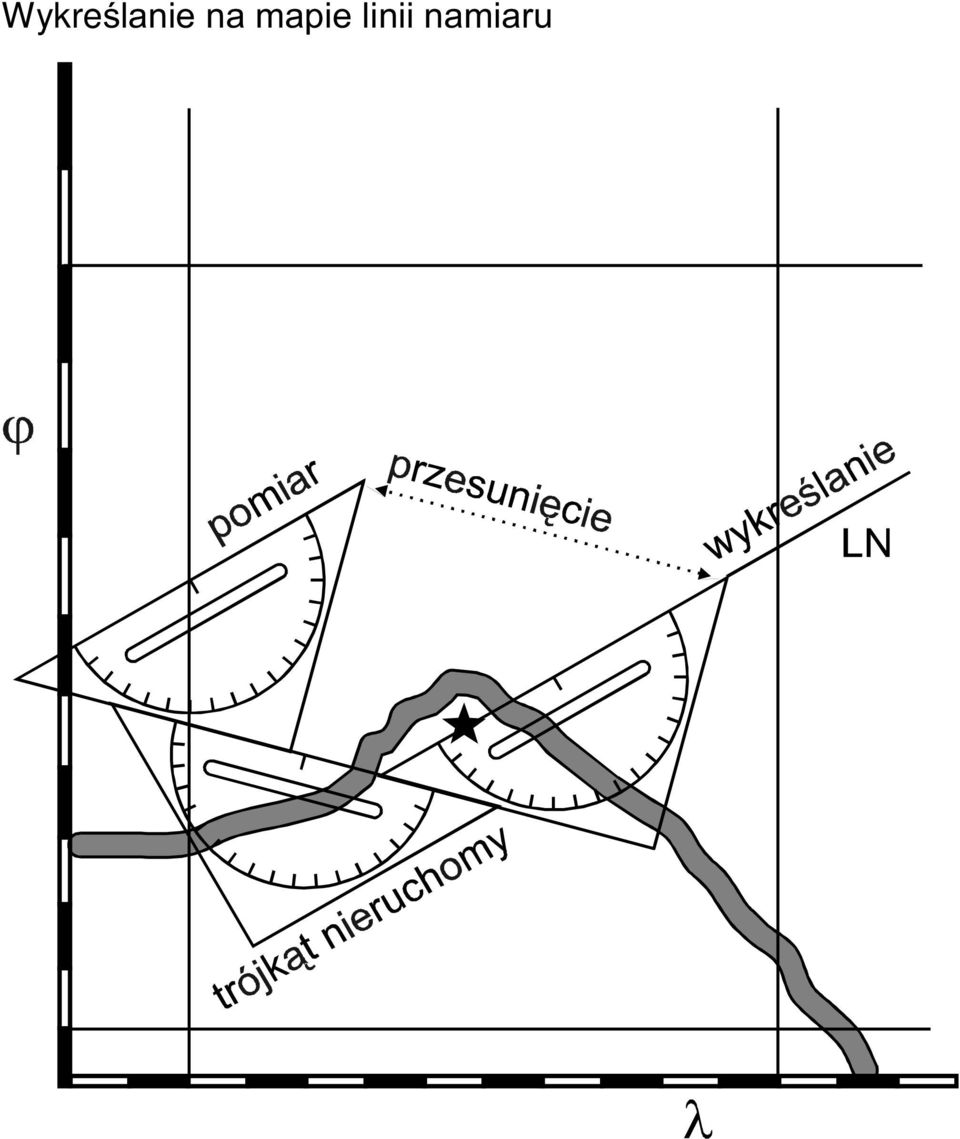
17 Wykreœlanie na mapie linii namiaru
18 K¹t drogi po wodzie, poprawka na wiatr Kurs rzeczywisty nie jest równoznaczny z kierunkiem poruszania siê jachtu, gdy jacht dryfuje. Dryfem jachtu, zwanym te poprawk¹ na wiatr (pw), jest jego zboczenie z kursu rzeczywistego pod wp³ywem wiatru. Jacht p³yn¹cy lewym halsem dryfuje w prawo, a wiêc jego dryf jest dodatni (+). Jacht p³yn¹cy prawym halsem ma dryf ujemny (-). Przy wiatrach z ty³u dryf jest równy zeru. Uwzglêdniaj¹c k¹t dryfu otrzymuje siê kierunek jachtu po wodzie. K¹t drogi po wodzie (KDw) jest to k¹t zawarty miêdzy pó³noc¹ geograficzn¹ a kierunkiem ruchu jachtu wzglêdem wody. Po uwzglêdnieniu dryfu schodki nawigatora przyjmuj¹ postaæ: Obliczanie kursu kompasowego. KDw =... - pw =... KR =... - d =... KM =... - δ =... KK =... Obliczanie k¹ta drogi nad dnem. KK =... + δ =... KM =... + d =... KR =... + pw =... KDw =... Uwaga: poprawka na wiatr nie ma wp³ywu na wartoœæ namiaru, nie nale y jej wiêc uwzglêdniaæ podczas obliczania namiarów.
 jest to k¹t zawarty miêdzy pó³noc¹ geograficzn¹ a kierunkiem ruchu jachtu wzglêdem wody.")
19 Opis kreski kursowej na mapie Na mapie rysujemy kreskê K¹ta Drogi po Wodzie, natomiast nad kresk¹, równolegle do niej opisujemy Kurs Kompasowy (KK= _), Ca³kowit¹ Poprawkê Kompasu (cp=±_) i Poprawkê na Wiatr (pw= ±_).
 i Poprawkê na")
20 Pomiar prêdkoœci. Log. Wspó³czynnik korekcyjny logu. Do okreœlania prêdkoœci na jachcie s³u y log Wyró niamy nastêpuj¹ce rodzaje logów: - hydromechaniczne - hydrodynamiczne (ciœnieniowe) - indukcyjne (elektromagnetyczne) - hydroakustyczne (dopplerowskie) - inercyjne Log hydromechaniczny Logi hydromechaniczne starego typu, zwane równie logami œrubowymi lub wiatraczkowymi, sk³adaj¹ siê ze œruby holowanej na d³ugiej loglinie i mechanizmu - licznika, który wskazuje przebyt¹ drogê jachtu. Zasada pracy logu polega na obracaniu œruby przez strumieñ wody wywo³any ruchem jachtu. W nowszych typach œruba, znajduj¹ca siê w wysuwanym przez dno jachtu trzonie, zwiera i rozwiera specjalny uk³ad steruj¹cy styków elektrycznych. W takt pracy styków steruj¹cych uruchamiany jest licznik przebytej drogi. Prêdkoœæ mo na uzyskaæ poœrednio, zliczaj¹c liczbê przesuniêæ wskazówki dziesiêtnej licznika drogi w okreœlonym czasie. Log hydrodynamiczny (ciœnieniowy) Zasada pracy logów ciœnieniowych oparta jest na prawie Pitota, zgodnie z którym ciœnienie wywierane przez przemieszczaj¹cy siê strumieñ wody na odpowiedni¹ powierzchniê jest proporcjonalne do kwadratu prêdkoœci tego strumienia. Poniewa prêdkoœæ przemieszczania siê strumienia wody zale y od prêdkoœci jachtu, wiêc log wskazuje jednoczeœnie jego prêdkoœæ. Logi ciœnieniowe wskazuj¹ tylko prêdkoœæ, natomiast drogê jachtu uzyskuje siê poœrednio, dziêki zastosowaniu w logu dodatkowego urz¹dzenia mno ¹cego prêdkoœæ przez czas. Log indukcyjny (elektromagnetyczny) Zasadnicz¹ rolê w pracy logu indukcyjnego odgrywa czujnik sk³adaj¹cy siê z cewki i dwóch elektrod umieszczonych pod dnem jachtu. Cewka zasilana napiêciem przemiennym wytwarza w wodzie, wokó³ czujnika, strumieñ pola magnetycznego prostopad³y do kursu jachtu i do p³aszczyzny elektrod znajduj¹cych siê po obydwu stronach czujnika. Pod wp³ywem wolnych jonów wody, op³ywaj¹cych œcianki boczne czujnika, linie pola magnetycznego uginaj¹ siê w kierunku prostopad³ym do ruchu jachtu, wywo³uj¹c w elektrodach indukcjê si³y elektromotorycznej. Wartoœæ ró nicy potencja³ów miêdzy elektrodami jest proporcjonalna do wartoœci prêdkoœci ruchu czujnika w stosunku do wody. Powsta³y sygna³ napiêciowy jest przekazywany do serwomotoru, którego wirnik wskazuje prêdkoœæ, a odpowiedni licznik przetwarza go na przebyt¹ drogê.

21 Wspó³czynnik korekcyjny logu. Ze wzglêdu na niedoskona³oœæ metody pomiaru, oraz wady mechaniczne log nie pokazuje prawdziwej odleg³oœci przebytej przez jacht. Odczyty logu obarczone s¹ b³êdem. Szczêœliwie jest to b³¹d sta³y i mo na go skorygowaæ. W tym celu wprowadza siê tzw. wspó³czynnik korekcyjny logu (a). S¹ ró ne sposoby zapisu tego wspó³czynnika: procentowy (a=7%), setny (a=0,07), ca³kowity (a=7). Poniewa wspó³czynnik nie bywa wiêkszy ni 100% (1 lub 100) nie wystêpuj¹ wieloznacznoœci zapisu. Wspó³czynnik mówi nam o jak¹ czêœæ mamy zmniejszyæ (znak -) lub zwiêkszyæ (znak +) drogê pokazan¹ przez log. Na przyk³ad je eli pierwszy odczyt logu (OL1) wyniós³ 25,8, drugi odczyt logu (OL2) wyniós³ 36,3, wsp. korekcyjny logu wynosi +7% (0,07;7) to jacht w/g logu przeby³: a w rzeczywistoœci jacht przeby³ nad dnem: d = OL2 OL1 = 10, 5Mm d = ( OL2 OL1)*(1 + a) = (36,3 25,8)*(1 + 0,07) = 10,5*1,07 = 11, 2Mm gdyby wsp. korekcyjny wynosi³ a=-7 jacht przeby³by nad dnem: d = ( OL2 OL1)*(1 a) = (36,3 25,8)*(1 0,07) = 10,5* 0,93 = 9, 8Mm W szczególnych przypadkach (np. egluga we mgle) na podstawie znajomoœci drogi przebytej nad dnem musimy policzyæ odczyt logu ( np. przy którym zrobimy zwrot ). W takiej sytuacji dla OL1=25,8, a=+7%, d=11,2 Mm obliczymy, e zwrot nale y wykonaæ przy : d 11,2 OL2 = OL1 + = 25,8 + = 36,6 1+ a 1+ 0,07 dla a=-7, OL1=25,8, d=11,2mm zwrot nale y wykonaæ przy: d 11,2 OL2 = OL1 + = 25,8 + = 37,8 1+ a 1+ ( 0,07)
22 Pozycja zliczona. Pozycja obserwowana. Ostatecznym celem wszystkich poczynañ nawigacyjnych jest bezpieczne przeprowadzenie jachtu do punktu docelowego. Podstawowym warunkiem osi¹gniêcia tego celu jest znajomoœæ aktualnej pozycji jachtu. Rozró nia siê dwa rodzaje pozycji jachtu - pozycja zliczona - pozycja obserwowana Pozycj¹ zliczon¹ jest miejsce jachtu liczone od ostatniej pozycji obserwowanej, otrzymane na podstawie znajomoœci kursu rzeczywistego i przebytej drogi zmierzonej za pomoc¹ logu. Opis pozycji zliczonej na mapie:
23 Pozycjê obserwowan¹ - zwan¹ tak e pozycj¹ prawdziw¹ - wyznacza siê na podstawie obserwacji obiektów brzegowych o œciœle okreœlonym po³o eniu lub na podstawie obserwacji cia³ niebieskich. Obserwowane obiekty niekoniecznie musz¹ le eæ w zasiêgu widzialnoœci optycznej, mog¹ byæ obserwowane równie za pomoc¹ radaru lub mog¹ wysy³aæ odpowiednie sygna³y radiowe. W celu wyznaczenia pozycji obserwowanej nale y dokonaæ przynajmniej dwóch obserwacji. Jedna obserwacja jednego obiektu umo liwia wyznaczenie tylko linii pozycyjnej. Linia pozycyjna jest to zbiór punktów na powierzchni Ziemi maj¹cych tê w³aœciwoœæ, e pomiar tego samego parametru wybranego obiektu (np. namiaru w którym widaæ latarniê morsk¹), prze-prowadzony z dowolnego z tych punktów, da zawsze ten sam wynik. Pozycjê obserwowan¹ wyznacza miejsce przeciêcia siê przynajmniej dwóch linii pozycyjnych. Opis pozycji obserwowanej na mapie:
24 Linia pozycyjna z namiaru. Liniê namiaru uzyskujemy poprzez po³¹czenie pozycji obserwatora z przedmiotem nawigacyjnym np. z latarni¹ morsk¹. Je eli okreœlimy k¹t zawarty pomiêdzy pó³nocn¹ czêœci¹ linii N-S rzeczywistej, a lini¹ namiaru i wykreœlimy na mapie Merkatora odpowiadaj¹c¹ mu liniê pozycyjn¹ to otrzymamy liniê prost¹. 10' NR NR 5' Pozycja obserwowana z dwóch namiarów. Namierzaj¹c dwa obiekty otrzymujemy pozycjê obserwowan¹ w momencie obserwacji na przeciêciu siê tych dwóch namiarów. Namiary nale y braæ szybko, aby nie trzeba by³o uwzglêdniaæ drogi pomiêdzy nimi. Najpierw namierzamy obiekt którego namiar zmienia siê wolniej (bli ej osi jachtu), a nastêpnie szybko zmieniaj¹cy siê (bli ej trawersu). Przy wyborze obiektów do namierzania nale y kierowaæ siê zasad¹, aby ró nica pomiêdzy namiarami by³a wiêksza od 30, gdy bardziej ostre k¹ty zmniejszaj¹ dok³adnoœæ pozycji. 10' NR1 NR2 5' Na rysunku: NR 1 =300, NR 2 =
25 Dwa niejednoczesne namiary. Pozycjê t¹ stosujemy przy widocznym tylko jednym obiekcie i braku mo liwoœci zmierzenia odleg³oœci do niego, oraz gdy jacht przez d³u szy czas nie zmienia kursu (wymagana jest zmiana namiaru na obiekt przynajmniej o 30 ). Sposób wykreœlania: 1. Z punktu A ( punkt przeciêcia siê NR 1 z KDd=KR ) od³o yæ drogê przebyt¹ w/g wskazañ logu pomiêdzy momentami obu namiarów - punkt B. 2. Przez punkt B wykreœliæ liniê równoleg³¹ do NR 1, która przecinaj¹c siê z NR 2 wyznaczy pozycjê obserwowan¹. 10' 5' ,0 A NR ,0 NR2 B ,0 Na rysunku: KDd=KR=090, NR 1 =037,NR 2 =324. Pozycja obserwowana z namiaru i g³êbokoœci. Pozycja obserwowana z namiaru i g³êbokoœci znajduje siê na przeciêciu linii g³êbokoœci i linii namiaru. Sposób ten mo na stosowaæ na akwenach o zró nicowanej konfiguracji dna i regularnych zmianach g³êbokoœci. 10' ' Na rysunku: NR=257, g³êbokoœæ = 20m.
26 Obliczanie KDw (bierne uwzglêdnianie wiatru) Przyk³ad O godzinie 1200, log 20,0 jacht znajdowa³ siê na pozycji obserwowanej A ( ϕ A, λ A ). Okreœliæ wspó³rzêdne pozycji zliczonej ( ϕz, λz ) na godzinê 1300, log 30,0, w przypadku gdy wieje wiatr N, pw=5, Vw=10w. Jacht p³ynie KK=086, d=-5, δ=+3. Rozwi¹zanie: KK = δ = +3 KM = d = -5 KR = Pw = +5 KDw = ' 5' ,0 A KK=086, cp=-2, pw=+5, pp= ,0 B Algorytm postêpowania: 1. Z pozycji obserwowanej A wykreœliæ KDd = KDw = Na wykreœlonym KDd od³o yæ drogê w/g wskazañ logu. 3. Otrzymany punkt B jest pozycj¹ zliczon¹ na godzinê Obliczanie KK (czynne uwzglêdnianie wiatru) Je eli droga nad dnem, któr¹ nale y p³yn¹æ jest okreœlona z góry, to przy istniej¹cym dryfie kurs (kompasowy) na jakim nale y utrzymaæ jacht obliczamy od ty³u. Przedstawione postêpowanie, które jest zasad¹ w praktyce morskiej nazywamy przeciwdzia³aniem skutkom dryfu. Przyk³ad O godzinie 1200, log 20,0 jacht znajdowa³ siê na pozycji obserwowanej A ( ϕa, λa ). Okreœliæ kurs, jakim nale y sterowaæ, aby dop³yn¹æ do punktu B ( ϕb, λb ) w przypadku, gdy wieje wiatr N, pw=5, Vw=10w, d=-5, δ=+3. Rozwi¹zanie: KDw = Pw = +5 KR = d = -5 KM = δ = +3 KK = ' 5' ,0 A KK=086, cp=-2, pw=+5, pp= ,0 B Algorytm postêpowania: 1. Z pozycji obserwowanej A wykreœliæ drogê nad dnem do punktu B i odczytaæ KDd. 2. Z KDd po uwzglêdnieniu poprawek obliczyæ KK.
27 Przyk³ad zadania nawigacyjnego O godzinie 1330, stan logu 10,0 jacht znajdowa³ siê na pozycji ϕ=55 02,0'N, λ=016 02,0'E, KK=000, wiatr NW4, przyjêto poprawkê na wiatr 4, deklinacja +2,5, wspó³czynnik korekcyjny logu +10. O godzinie 1400 stan logu 12,2. O godzinie 1415 stan logu 13,4 przyjêto KK=090, poprawkê na wiatr =0. O godzinie 1500 stan logu 16,5. O godzinie 1515 stan logu 17,5 dokonano namiaru kompasowego na latarniê XXX NK=026. O godzinie 1540 stan logu 19,3 dokonano namiaru kompasowego na latarniê XXX NK=312. Okreœliæ wspó³rzêdne geograficzne jachtu o godzinie Deklinacjê podano na stronie 11(mapa polska), tabelê dewiacji na stronie 14.
28 Pawe³ Burkhard (ur. 1973) Student Politechniki Czêstochowskiej. Patent eglarza Jachtowego uzyska³ w wieku 15 lat, rok póÿniej uzyka³ patent sternika i rozpocz¹³ pracê instruktorsk¹. W 1996r. rozpocz¹³ wspó³pracê z HOW w Poraju. W 1997r. uzyska³ patent M³odszego Instruktora eglarstwa PZ, a w 1999 Instruktora eglarstwa PZ. Od momentu uzyskania patentu sternika jachtowego bierze udzia³ w rejsach morskich do Anglii, Belgii, Danii, Finlandii, Holandii, Irlandii, Niemiec i Szwecji.
Podstawy Nawigacji. Kierunki. Jednostki
 Podstawy Nawigacji Kierunki Jednostki Program wykładów: Istota, cele, zadania i rodzaje nawigacji. Podstawowe pojęcia i definicje z zakresu nawigacji. Morskie jednostki miar. Kierunki na morzu, rodzaje,
Podstawy Nawigacji Kierunki Jednostki Program wykładów: Istota, cele, zadania i rodzaje nawigacji. Podstawowe pojęcia i definicje z zakresu nawigacji. Morskie jednostki miar. Kierunki na morzu, rodzaje,
POMIARY OŒWIETLENIA DRÓG EWAKUACYJNYCH I STANOWISK PRACY WE WNÊTRZACH
 Witold ŒLIRZ DASL Systemy POMIARY OŒWIETLENIA DRÓG EWAKUACYJNYCH I STANOWISK PRACY WE WNÊTRZACH 1. Badanie oœwietlenia w œwietle przepisów i norm Przepisy prawne: Rozporz¹dzenie Ministra Pracy i Polityki
Witold ŒLIRZ DASL Systemy POMIARY OŒWIETLENIA DRÓG EWAKUACYJNYCH I STANOWISK PRACY WE WNÊTRZACH 1. Badanie oœwietlenia w œwietle przepisów i norm Przepisy prawne: Rozporz¹dzenie Ministra Pracy i Polityki
VRRK. Regulatory przep³ywu CAV
 Regulatory przep³ywu CAV VRRK SMAY Sp. z o.o. / ul. Ciep³ownicza 29 / 1-587 Kraków tel. +48 12 680 20 80 / fax. +48 12 680 20 89 / e-mail: info@smay.eu Przeznaczenie Regulator sta³ego przep³ywu powietrza
Regulatory przep³ywu CAV VRRK SMAY Sp. z o.o. / ul. Ciep³ownicza 29 / 1-587 Kraków tel. +48 12 680 20 80 / fax. +48 12 680 20 89 / e-mail: info@smay.eu Przeznaczenie Regulator sta³ego przep³ywu powietrza
Spis treści Wyznaczenie pozycji przy pomocy jednego obserwowanego obiektu... 47
 Spis treści Podstawowe oznaczenia...5 1.Tabela dewiacji.....7 2. Pozycja zliczona.......8 2.1. Pozycja zliczona bez uwzględnienia działania wiatru i prądu...8 2.2. Pozycja zliczona przy uwzględnieniu działania
Spis treści Podstawowe oznaczenia...5 1.Tabela dewiacji.....7 2. Pozycja zliczona.......8 2.1. Pozycja zliczona bez uwzględnienia działania wiatru i prądu...8 2.2. Pozycja zliczona przy uwzględnieniu działania
ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU.
 SPIS TREŚCI Przedmowa ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU. 1.1. Szerokość i długość geograficzna. Różnica długości. Różnica szerokości. 1.1.1.
SPIS TREŚCI Przedmowa ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU. 1.1. Szerokość i długość geograficzna. Różnica długości. Różnica szerokości. 1.1.1.
nawigację zliczeniową, która polega na określaniu pozycji na podstawie pomiaru przebytej drogi i jej kierunku.
 14 Nawigacja dla żeglarzy nawigację zliczeniową, która polega na określaniu pozycji na podstawie pomiaru przebytej drogi i jej kierunku. Rozwiązania drugiego problemu nawigacji, tj. wyznaczenia bezpiecznej
14 Nawigacja dla żeglarzy nawigację zliczeniową, która polega na określaniu pozycji na podstawie pomiaru przebytej drogi i jej kierunku. Rozwiązania drugiego problemu nawigacji, tj. wyznaczenia bezpiecznej
WALC ANGIELSKI. Historia tañca. Charakter tañca, technika taneczna. Takt, rytm
 Historia tañca Narodziny powolnego walca mia³y miejsce w Anglii na pocz¹tku lat dwudziestych XX wieku. Walc angielski powsta³ na bazie dwóch tañców szybkiego i wirowego walca wiedeñskiego (powsta³ego w
Historia tañca Narodziny powolnego walca mia³y miejsce w Anglii na pocz¹tku lat dwudziestych XX wieku. Walc angielski powsta³ na bazie dwóch tañców szybkiego i wirowego walca wiedeñskiego (powsta³ego w
Wykonania atestowane zgodnie z norm¹ DIN EN 14597 z zaworem przelotowym typu 3213 bez odci¹ enia ciœnieniowego
 Zawory z si³ownikiem elektrycznym z funkcj¹ bezpieczeñstwa, atestowane zgodnie z norm¹ DIN EN 14597, typ 3213/5825, 3213/5725-3, 3213/5725-7, 3213/5725-8 i 3214/5825, 3214/3374, 3214/3274, 3214/5725-3,
Zawory z si³ownikiem elektrycznym z funkcj¹ bezpieczeñstwa, atestowane zgodnie z norm¹ DIN EN 14597, typ 3213/5825, 3213/5725-3, 3213/5725-7, 3213/5725-8 i 3214/5825, 3214/3374, 3214/3274, 3214/5725-3,
Komentarz technik nawigator morski 314[01]-01 Czerwiec 2009
![Komentarz technik nawigator morski 314[01]-01 Czerwiec 2009](/thumbs/39/19236052.jpg "Komentarz technik nawigator morski 314[01]-01 Czerwiec 2009") Strona 1 z 13 Strona 2 z 13 Strona 3 z 13 Strona 4 z 13 Strona 5 z 13 Strona 6 z 13 Zdający egzamin w zawodzie technik nawigator morski wykonywali zadanie praktyczne wynikające ze standardu wymagań o treści
Strona 1 z 13 Strona 2 z 13 Strona 3 z 13 Strona 4 z 13 Strona 5 z 13 Strona 6 z 13 Zdający egzamin w zawodzie technik nawigator morski wykonywali zadanie praktyczne wynikające ze standardu wymagań o treści
Hydrauliczne kontrolery prêdkoœci si³owników pneumatycznych
 Seria 10 RECTUS POLSK Opis Hydrauliczny kontroler prêdkoœci wysuniêcia jest mechanicznie sprzê ony z si³ownikiem pneumatycznym. Z natury rzeczy pneumatyczny si³ownik nie zapewnia jednostajnoœci wysuwu
Seria 10 RECTUS POLSK Opis Hydrauliczny kontroler prêdkoœci wysuniêcia jest mechanicznie sprzê ony z si³ownikiem pneumatycznym. Z natury rzeczy pneumatyczny si³ownik nie zapewnia jednostajnoœci wysuwu
ARKUSZ EGZAMINACYJNY ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE CZERWIEC 2010
 Zawód: technik nawigator morski Symbol cyfrowy zawodu: 314[01] Numer zadania: 1 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu 314[01]-01-102 Czas trwania egzaminu: 240 minut
Zawód: technik nawigator morski Symbol cyfrowy zawodu: 314[01] Numer zadania: 1 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu 314[01]-01-102 Czas trwania egzaminu: 240 minut
3b. Rozwiązywanie zadań ze skali mapy
 3b. Rozwiązywanie zadań ze skali mapy SKALA MAPY określa stopień zmniejszenia odległości przedstawionej na mapie w stosunku do odpowiedniej odległości w terenie. Wyróżniamy następujące rodzaje skali: SKALA
3b. Rozwiązywanie zadań ze skali mapy SKALA MAPY określa stopień zmniejszenia odległości przedstawionej na mapie w stosunku do odpowiedniej odległości w terenie. Wyróżniamy następujące rodzaje skali: SKALA
1 Granice funkcji. Definicja 1 (Granica w sensie Cauchy ego). Mówimy, że liczba g jest granicą funkcji f(x) w punkcie x = a, co zapisujemy.
. Mówimy, że liczba g jest granicą funkcji f(x) w punkcie x = a, co zapisujemy.") Granice funkcji Definicja (Granica w sensie Cauchy ego). Mówimy, że liczba g jest granicą funkcji f() w punkcie = a, co zapisujemy f() = g (.) a jeżeli dla każdego ε > 0 można wskazać taką liczbę (istnieje
Granice funkcji Definicja (Granica w sensie Cauchy ego). Mówimy, że liczba g jest granicą funkcji f() w punkcie = a, co zapisujemy f() = g (.) a jeżeli dla każdego ε > 0 można wskazać taką liczbę (istnieje
KONKURSY MATEMATYCZNE. Treść zadań
 KONKURSY MATEMATYCZNE Treść zadań Wskazówka: w każdym zadaniu należy wskazać JEDNĄ dobrą odpowiedź. Zadanie 1 Wlewamy 1000 litrów wody do rurki w najwyższym punkcie systemu rurek jak na rysunku. Zakładamy,
KONKURSY MATEMATYCZNE Treść zadań Wskazówka: w każdym zadaniu należy wskazać JEDNĄ dobrą odpowiedź. Zadanie 1 Wlewamy 1000 litrów wody do rurki w najwyższym punkcie systemu rurek jak na rysunku. Zakładamy,
KOJCE PORODOWE INSTRUKCJA MONTA U
 www.rolstal.pl KOJCE PORODOWE INSTRUKCJA MONTA U Planowanie sektorów porodowych 07-300 Ostrów Maz. ul. Ró añska 45 tel. (029) 645-74-00 fax (029) 645-74-70 Podczas porodu zarówno maciora, jak i rodz¹ce
www.rolstal.pl KOJCE PORODOWE INSTRUKCJA MONTA U Planowanie sektorów porodowych 07-300 Ostrów Maz. ul. Ró añska 45 tel. (029) 645-74-00 fax (029) 645-74-70 Podczas porodu zarówno maciora, jak i rodz¹ce
Wybrane zagadnienia z nawigacji. dla kandydatów na STERNIKÓW JACHTOWYCH
 Wybrane zagadnienia z nawigacji dla kandydatów na STERNIKÓW JACHTOWYCH opracowa³ PAWE BURKHARD Siatka geograficzna Oœ Ziemi - œrednica Ziemi, wokó³ której obraca siê ona w swoim ruchu wirowym. Bieguny
Wybrane zagadnienia z nawigacji dla kandydatów na STERNIKÓW JACHTOWYCH opracowa³ PAWE BURKHARD Siatka geograficzna Oœ Ziemi - œrednica Ziemi, wokó³ której obraca siê ona w swoim ruchu wirowym. Bieguny
Geometria Wykreślna Wykład 3
 Geometria Wykreślna Wykład 3 OBRÓT PUNKTU Z obrotem punktu A związane są następujące elementy obrotu: - oś obrotu - prosta l, - płaszczyzna obrotu - płaszczyzna, - środek obrotu - punkt S, - promień obrotu
Geometria Wykreślna Wykład 3 OBRÓT PUNKTU Z obrotem punktu A związane są następujące elementy obrotu: - oś obrotu - prosta l, - płaszczyzna obrotu - płaszczyzna, - środek obrotu - punkt S, - promień obrotu
Mechanika bry³y sztywnej
 Mechanika bry³y sztywnej Uzupe³nienie uzupe³nienie mechanika bry³y sztywnej Bry³a sztywna. uch postêpowy i obrotowy 1 W paragrafie 1. dokonaliœmy podzia³u ruchów na postêpowe i obrotowe. Wszystkie punkty
Mechanika bry³y sztywnej Uzupe³nienie uzupe³nienie mechanika bry³y sztywnej Bry³a sztywna. uch postêpowy i obrotowy 1 W paragrafie 1. dokonaliœmy podzia³u ruchów na postêpowe i obrotowe. Wszystkie punkty
KASA EDUKACYJNA INSTRUKCJA. WARIANT I - dla dzieci młodszych
 INSTRUKCJA KASA EDUKACYJNA WARIANT I - dla dzieci młodszych rekwizyty: 1) plansza (żółta) 2) pionki - 4 szt. 3) kostka do gry 4) żetony (50 szt.) 6) kaseta z monetami i banknotami rys. 1 Przygotowanie
INSTRUKCJA KASA EDUKACYJNA WARIANT I - dla dzieci młodszych rekwizyty: 1) plansza (żółta) 2) pionki - 4 szt. 3) kostka do gry 4) żetony (50 szt.) 6) kaseta z monetami i banknotami rys. 1 Przygotowanie
KARTY PRACY UCZNIA. Twierdzenie Pitagorasa i jego zastosowanie. samodzielnej pracy ucznia. Zawarte w nich treści są ułożone w taki sposób,
 KARTY PRACY UCZNIA Twierdzenie Pitagorasa i jego zastosowanie opracowanie: mgr Teresa Kargol, nauczyciel matematyki w PSP nr 162 w Łodzi Karty pracy to materiały pomocnicze, które mogą służyć do samodzielnej
KARTY PRACY UCZNIA Twierdzenie Pitagorasa i jego zastosowanie opracowanie: mgr Teresa Kargol, nauczyciel matematyki w PSP nr 162 w Łodzi Karty pracy to materiały pomocnicze, które mogą służyć do samodzielnej
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2017 Nazwa kwalifikacji: Pełnienie wachty morskiej i portowej Oznaczenie kwalifikacji: A.39 Numer zadania:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2017 Nazwa kwalifikacji: Pełnienie wachty morskiej i portowej Oznaczenie kwalifikacji: A.39 Numer zadania:
ROZWIĄZANIA ZADAŃ Zestaw P3 Odpowiedzi do zadań zamkniętych
 PRZYKŁADOWY ARKUSZ EGZAMINACYJNY POZIOM PODSTAWOWY ROZWIĄZANIA ZADAŃ Zestaw P3 Odpowiedzi do zadań zamkniętych Numer zadania 1 3 4 5 6 7 8 9 10 11 1 13 14 15 16 17 18 19 0 Odpowiedź A B B C C D C B B C
PRZYKŁADOWY ARKUSZ EGZAMINACYJNY POZIOM PODSTAWOWY ROZWIĄZANIA ZADAŃ Zestaw P3 Odpowiedzi do zadań zamkniętych Numer zadania 1 3 4 5 6 7 8 9 10 11 1 13 14 15 16 17 18 19 0 Odpowiedź A B B C C D C B B C
SUUNTO SK-8 DIVE COMPASSES PODRĘCZNIK UŻYTKOWNIKA
 SUUNTO SK-8 DIVE COMPASSES PODRĘCZNIK UŻYTKOWNIKA BUDOWA KOMPASU 2 1 4 3 1. Tarcza kompasu ze strzałką wskazującą kierunek północy magnetycznej 2. Obrotowy pierścień służący do ustawiania kierunku do celu
SUUNTO SK-8 DIVE COMPASSES PODRĘCZNIK UŻYTKOWNIKA BUDOWA KOMPASU 2 1 4 3 1. Tarcza kompasu ze strzałką wskazującą kierunek północy magnetycznej 2. Obrotowy pierścień służący do ustawiania kierunku do celu
TEST WIADOMOŚCI: Równania i układy równań
 Poziom nauczania: Gimnazjum, klasa II Przedmiot: Matematyka Dział: Równania i układy równań Czas trwania: 45 minut Wykonała: Joanna Klimeczko TEST WIADOMOŚCI: Równania i układy równań Liczba punktów za
Poziom nauczania: Gimnazjum, klasa II Przedmiot: Matematyka Dział: Równania i układy równań Czas trwania: 45 minut Wykonała: Joanna Klimeczko TEST WIADOMOŚCI: Równania i układy równań Liczba punktów za
KTM. Klapy przeciwpo arowe odcinaj¹ce
 Klapy przeciwpo arowe odcinaj¹ce KTM Certyfikat sta³oœci w³asnoœci u ytkowych -CPR-/W Spe³nia wymagania norm: PN-EN Wentylacja budynków przeciwpo arowe klapy odcinaj¹ce montowane w przewodach. Certified
Klapy przeciwpo arowe odcinaj¹ce KTM Certyfikat sta³oœci w³asnoœci u ytkowych -CPR-/W Spe³nia wymagania norm: PN-EN Wentylacja budynków przeciwpo arowe klapy odcinaj¹ce montowane w przewodach. Certified
PODSTAWY NAWIGACJI Pozycja statku i jej rodzaje.
 PODSTWY NWIGCJI Program wykładów: Istota, cele, zadania i rodzaje nawigacji. Podstawowe pojęcia i definicje z zakresu nawigacji. Morskie jednostki miar. Kierunki na morzu, rodzaje, zamiana kierunków. Systemy
PODSTWY NWIGCJI Program wykładów: Istota, cele, zadania i rodzaje nawigacji. Podstawowe pojęcia i definicje z zakresu nawigacji. Morskie jednostki miar. Kierunki na morzu, rodzaje, zamiana kierunków. Systemy
Matematyka:Matematyka I - ćwiczenia/granice funkcji
 Matematyka:Matematyka I - ćwiczenia/granice funkcji 1 Matematyka:Matematyka I - ćwiczenia/granice funkcji Granice funkcji Zadanie 1 Wykorzystując definicję Heinego granicy funkcji, znaleźć (1) Zadanie
Matematyka:Matematyka I - ćwiczenia/granice funkcji 1 Matematyka:Matematyka I - ćwiczenia/granice funkcji Granice funkcji Zadanie 1 Wykorzystując definicję Heinego granicy funkcji, znaleźć (1) Zadanie
Spe³nia wymagania norm: PN-EN 15650 Wentylacja budynków przeciwpo arowe klapy odcinaj¹ce montowane w przewodach.
 Klapy przeciwpo arowe odcinaj¹ce KTS-O-E KTS-O-S Certyfikat sta³oœci w³asnoœci u ytkowych 1-CPR-05/W Spe³nia wymagania norm: PN-EN 1550 Wentylacja budynków przeciwpo arowe klapy odcinaj¹ce montowane w
Klapy przeciwpo arowe odcinaj¹ce KTS-O-E KTS-O-S Certyfikat sta³oœci w³asnoœci u ytkowych 1-CPR-05/W Spe³nia wymagania norm: PN-EN 1550 Wentylacja budynków przeciwpo arowe klapy odcinaj¹ce montowane w
W wodzie, na wodzie i w powietrzu. (hydrostatyka, aerostatyka)
") W wodzie, na wodzie i w powietrzu (hydrostatyka, aerostatyka) Rozwi¹zania 7 W wodzie, na wodzie i w powietrzu (hydrostatyka, aerostatyka) 131 We wszystkich przypadkach chodzi o zwiêkszenie lub zmniejszenie
W wodzie, na wodzie i w powietrzu (hydrostatyka, aerostatyka) Rozwi¹zania 7 W wodzie, na wodzie i w powietrzu (hydrostatyka, aerostatyka) 131 We wszystkich przypadkach chodzi o zwiêkszenie lub zmniejszenie
Dziennik Urzêdowy. postêpowania z wnioskiem o udzielenie dotacji. spe³nia nastêpuj¹ce kryteria:
 Województwa Wielkopolskiego Nr 65 5445 910 UCHWA A Nr XXIII/169/2009 RADY MIEJSKIEJ W Tuliszkowie z dnia 23 lutego 2009 r. w sprawie przyjêcia zasad i trybu udzielania dotacji na sfinansowanie prac konserwatorskich,
Województwa Wielkopolskiego Nr 65 5445 910 UCHWA A Nr XXIII/169/2009 RADY MIEJSKIEJ W Tuliszkowie z dnia 23 lutego 2009 r. w sprawie przyjêcia zasad i trybu udzielania dotacji na sfinansowanie prac konserwatorskich,
FUNKCJE STEROWNIKA PK-35 PID
 Sterownik PK-35 PID Uwaga!!! Montażu dokonuje osoba posiadająca odpowiednie uprawnienia elektryczne. UWAGA!!! FUNKCJĘ PID WYBIERAMY PO UPRZEDNIM ODPOWIEDNIM DOBRANIU WSZYSKICH PARAMETRÓW PODAJNIKA W ZALEŻNOŚCI
Sterownik PK-35 PID Uwaga!!! Montażu dokonuje osoba posiadająca odpowiednie uprawnienia elektryczne. UWAGA!!! FUNKCJĘ PID WYBIERAMY PO UPRZEDNIM ODPOWIEDNIM DOBRANIU WSZYSKICH PARAMETRÓW PODAJNIKA W ZALEŻNOŚCI
WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY Z MATEMATYKI KLASA IV SZKOŁA PODSTAWOWA W KLĘCZANACH ROK SZKOLNY
 WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY Z MATEMATYKI KLASA IV SZKOŁA PODSTAWOWA W KLĘCZANACH ROK SZKOLNY 2014/ 2015 Dostosowane do programu,,matematyka z kluczem'' I półrocze Dopuszczający Dostateczny
WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY Z MATEMATYKI KLASA IV SZKOŁA PODSTAWOWA W KLĘCZANACH ROK SZKOLNY 2014/ 2015 Dostosowane do programu,,matematyka z kluczem'' I półrocze Dopuszczający Dostateczny
wentylatory dachowe RFHV
 Zastosowanie Wentylatory dachowe wyci¹gowe RFHV przeznaczone s¹ do wentylacji pomieszczeñ o niskim stopniu zanieczyszczenia powietrza. Stosowane s¹ w instalacjach wyci¹gowych z mieszkañ, supermarketów,
Zastosowanie Wentylatory dachowe wyci¹gowe RFHV przeznaczone s¹ do wentylacji pomieszczeñ o niskim stopniu zanieczyszczenia powietrza. Stosowane s¹ w instalacjach wyci¹gowych z mieszkañ, supermarketów,
PROGRAM SZKOLENIA Jachtowy sternik morski teoria e-learning stan na dzień:
 PROGRAM SZKOLENIA Jachtowy sternik morski 1. Wiedza teoretyczna: 1) jachty żaglowe morskie, w tym: a) eksploatacja i budowa instalacji i urządzeń jachtu oraz ocena ich stanu technicznego b) obsługa przyczepnych
PROGRAM SZKOLENIA Jachtowy sternik morski 1. Wiedza teoretyczna: 1) jachty żaglowe morskie, w tym: a) eksploatacja i budowa instalacji i urządzeń jachtu oraz ocena ich stanu technicznego b) obsługa przyczepnych
Pomiary geofizyczne w otworach
 Pomiary geofizyczne w otworach Profilowanie w geofizyce otworowej oznacza rejestrację zmian fizycznego parametru z głębokością. Badania geofizyki otworowej, wykonywane dla potrzeb geologicznego rozpoznania
Pomiary geofizyczne w otworach Profilowanie w geofizyce otworowej oznacza rejestrację zmian fizycznego parametru z głębokością. Badania geofizyki otworowej, wykonywane dla potrzeb geologicznego rozpoznania
MATEMATYKA 9. INSTYTUT MEDICUS Kurs przygotowawczy do matury i rekrutacji na studia medyczne Rok 2017/2018 FUNKCJE WYKŁADNICZE, LOGARYTMY
 INSTYTUT MEDICUS Kurs przygotowawczy do matury i rekrutacji na studia medyczne Rok 017/018 www.medicus.edu.pl tel. 501 38 39 55 MATEMATYKA 9 FUNKCJE WYKŁADNICZE, LOGARYTMY Dla dowolnej liczby a > 0, liczby
INSTYTUT MEDICUS Kurs przygotowawczy do matury i rekrutacji na studia medyczne Rok 017/018 www.medicus.edu.pl tel. 501 38 39 55 MATEMATYKA 9 FUNKCJE WYKŁADNICZE, LOGARYTMY Dla dowolnej liczby a > 0, liczby
TWIERDZENIE PITAGORASA
 PODSTAWY > Figury płaskie (2) TWIERDZENIE PITAGORASA Twierdzenie Pitagorasa dotyczy trójkąta prostokątnego, to znaczy takiego, który ma jeden kąt prosty. W trójkącie prostokątnym boki, które tworzą kąt
PODSTAWY > Figury płaskie (2) TWIERDZENIE PITAGORASA Twierdzenie Pitagorasa dotyczy trójkąta prostokątnego, to znaczy takiego, który ma jeden kąt prosty. W trójkącie prostokątnym boki, które tworzą kąt
OCENA PODATNOŒCI ZESPOLENIA NA PODSTAWIE WYNIKÓW BADANIA MOSTU DROGOWEGO POD OBCI ENIEM SAMOCHODAMI
 DROGI i MOSTY 57 Nr 4 2006 CZES AW MACHELSKI 1) ROBERT TOCZKIEWICZ 2) OCENA PODATNOŒCI ZESPOLENIA NA PODSTAWIE WYNIKÓW BADANIA MOSTU DROGOWEGO POD OBCI ENIEM SAMOCHODAMI STRESZCZENIE. Skutecznoœæ wspó³dzia³ania
DROGI i MOSTY 57 Nr 4 2006 CZES AW MACHELSKI 1) ROBERT TOCZKIEWICZ 2) OCENA PODATNOŒCI ZESPOLENIA NA PODSTAWIE WYNIKÓW BADANIA MOSTU DROGOWEGO POD OBCI ENIEM SAMOCHODAMI STRESZCZENIE. Skutecznoœæ wspó³dzia³ania
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2019 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Pełnienie wachty morskiej i portowej Oznaczenie kwalifikacji: A.39 Numer zadania:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Pełnienie wachty morskiej i portowej Oznaczenie kwalifikacji: A.39 Numer zadania:
SCHEMATY STRON. Baner... 3. Nawigacja... 6. Nawigacja okruszkowa... 9. Prawa kolumna zobacz również... 10. Boksy... 11. Zwykła strona...
 SCHEMATY STRON SPIS TREŚCI Baner... 3 Nawigacja... 6 Nawigacja okruszkowa... 9 Prawa kolumna zobacz również... 10 Boksy... 11 Zwykła strona... 13 Strona bez podstron... 14 1 Schemat strony to zestaw elementów
SCHEMATY STRON SPIS TREŚCI Baner... 3 Nawigacja... 6 Nawigacja okruszkowa... 9 Prawa kolumna zobacz również... 10 Boksy... 11 Zwykła strona... 13 Strona bez podstron... 14 1 Schemat strony to zestaw elementów
BLOK I. 3. Korzystając z definicji pochodnej w punkcie, obliczyć pochodne podanych funkcji we wskazanych punktach:
 BLOK I. Rachunek różniczkowy i całkowy. Znaleźć przyrost funkcji f() = przy = zakładając, że przyrost zmiennej niezależnej jest równy: a), ; b), ;, 5.. Znaleźć iloraz różnicowy funkcji y = f() w punkcie
BLOK I. Rachunek różniczkowy i całkowy. Znaleźć przyrost funkcji f() = przy = zakładając, że przyrost zmiennej niezależnej jest równy: a), ; b), ;, 5.. Znaleźć iloraz różnicowy funkcji y = f() w punkcie
STEROWNIK MOCY JEDNOFAZOWY TYPU RP7
 STEROWNIK MOCY JEDNOFAZOWY TYPU RP7 INSTRUKCJA OBS UGI SPIS TREŒCI strona 1. Zastosowanie... 3 2. Zestaw sterownika... 3 3. Dane techniczne... 3 4. Kod wykonañ... 5 5. Opis konstrukcji i dzia³ania...
STEROWNIK MOCY JEDNOFAZOWY TYPU RP7 INSTRUKCJA OBS UGI SPIS TREŒCI strona 1. Zastosowanie... 3 2. Zestaw sterownika... 3 3. Dane techniczne... 3 4. Kod wykonañ... 5 5. Opis konstrukcji i dzia³ania...
Kwantowa natura promieniowania elektromagnetycznego
 Kwantowa natura promieniowania elektromagnetycznego Zjawisko fotoelektryczne. Zadanie 1. Jaką prędkość posiada fotoelektron wytworzony przez kwant γ o energii E γ=1,27mev? W porównaniu z pracą wyjścia
Kwantowa natura promieniowania elektromagnetycznego Zjawisko fotoelektryczne. Zadanie 1. Jaką prędkość posiada fotoelektron wytworzony przez kwant γ o energii E γ=1,27mev? W porównaniu z pracą wyjścia
ARKUSZ EGZAMINACYJNY ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJ CEGO KWALIFIKACJE ZAWODOWE CZERWIEC 2013
 Zawód: technik nawigator morski Symbol cyfrowy zawodu: 314[01] Numer zadania: 1 Arkusz zawiera informacje prawnie chronione do momentu rozpocz cia egzaminu 314[01]-01-132 Czas trwania egzaminu: 240 minut
Zawód: technik nawigator morski Symbol cyfrowy zawodu: 314[01] Numer zadania: 1 Arkusz zawiera informacje prawnie chronione do momentu rozpocz cia egzaminu 314[01]-01-132 Czas trwania egzaminu: 240 minut
ROZDZIAŁ ÓSMY R o z w a ż a n i a n a t e m a t y ż e g l a r s k i e
 ROZDZIAŁ ÓSMY Rozważania na tematy żeglarskie HISTORIA POWOJENNEGO NADAWANIA STOPNI ŻEGLARSKICH (widziana przez szuwarowego zbąszyńskiego żeglarza) Omawiając Historie Żeglarstwa Zbąszyńskiego wielokrotnie
ROZDZIAŁ ÓSMY Rozważania na tematy żeglarskie HISTORIA POWOJENNEGO NADAWANIA STOPNI ŻEGLARSKICH (widziana przez szuwarowego zbąszyńskiego żeglarza) Omawiając Historie Żeglarstwa Zbąszyńskiego wielokrotnie
Instrukcja obs³ugi: Sterownik AURATON 1105 Plus
 Instrukcja obs³ugi: Sterownik AURATON 115 Plus AURATON 115 Plus 2 Sterownik AURATON 115 Plus Gratulujemy Pañstwu zakupu nowoczesnego sterownika pompy centralnego ogrzewania AURATON 115 Plus i dziêkujemy
Instrukcja obs³ugi: Sterownik AURATON 115 Plus AURATON 115 Plus 2 Sterownik AURATON 115 Plus Gratulujemy Pañstwu zakupu nowoczesnego sterownika pompy centralnego ogrzewania AURATON 115 Plus i dziêkujemy
Odpowiedzi i schematy oceniania Arkusz 23 Zadania zamknięte. Wskazówki do rozwiązania. Iloczyn dwóch liczb ujemnych jest liczbą dodatnią, zatem
 Odpowiedzi i schematy oceniania Arkusz Zadania zamknięte Numer zadania Poprawna odpowiedź Wskazówki do rozwiązania B W ( ) + 8 ( ) 8 W ( 7) ( 7) ( 7 ) 8 ( 7) ( 8) 8 ( 8) Iloczyn dwóch liczb ujemnych jest
Odpowiedzi i schematy oceniania Arkusz Zadania zamknięte Numer zadania Poprawna odpowiedź Wskazówki do rozwiązania B W ( ) + 8 ( ) 8 W ( 7) ( 7) ( 7 ) 8 ( 7) ( 8) 8 ( 8) Iloczyn dwóch liczb ujemnych jest
Podręcznik Żeglarstwa. Szkoła Żeglarstwa SZEKLA
 Podręcznik Żeglarstwa Szkoła Żeglarstwa SZEKLA Autor rozdziału: Wojciech Damsz Podstawy nawigacji dla Żeglarzy Jachtowych Nawigacja morska jest dziedziną wiedzy żeglarskiej, która umożliwia bezpieczne
Podręcznik Żeglarstwa Szkoła Żeglarstwa SZEKLA Autor rozdziału: Wojciech Damsz Podstawy nawigacji dla Żeglarzy Jachtowych Nawigacja morska jest dziedziną wiedzy żeglarskiej, która umożliwia bezpieczne
Wykład 4 Wybrane zagadnienia programowania w C++
 Wykład 4 Wybrane zagadnienia programowania w C++ Przykład programu obiektowego Dziedziczenie polimorfizm i metody wirtualne Wzorce (szablony) funkcji Wzorce klas 2016-01-03 Bazy danych-1 W4 1 Dziedziczenie
Wykład 4 Wybrane zagadnienia programowania w C++ Przykład programu obiektowego Dziedziczenie polimorfizm i metody wirtualne Wzorce (szablony) funkcji Wzorce klas 2016-01-03 Bazy danych-1 W4 1 Dziedziczenie
Test F- Snedecora. będzie zmienną losową chi-kwadrat o k 1 stopniach swobody a χ
 Test F- nedecora W praktyce często mamy do czynienia z kilkoma niezaleŝnymi testami, słuŝącymi do weryfikacji tej samej hipotezy, prowadzącymi do odrzucenia lub przyjęcia hipotezy zerowej na róŝnych poziomach
Test F- nedecora W praktyce często mamy do czynienia z kilkoma niezaleŝnymi testami, słuŝącymi do weryfikacji tej samej hipotezy, prowadzącymi do odrzucenia lub przyjęcia hipotezy zerowej na róŝnych poziomach
Statystyki opisowe. Marcin Zajenkowski. Marcin Zajenkowski () Statystyki opisowe 1 / 57
 Statystyki opisowe 1 / 57") Statystyki opisowe Marcin Zajenkowski Marcin Zajenkowski () Statystyki opisowe 1 / 57 Struktura 1 Miary tendencji centralnej Średnia arytmetyczna Wartość modalna Mediana 2 Miary rozproszenia Roztęp Wariancja
Statystyki opisowe Marcin Zajenkowski Marcin Zajenkowski () Statystyki opisowe 1 / 57 Struktura 1 Miary tendencji centralnej Średnia arytmetyczna Wartość modalna Mediana 2 Miary rozproszenia Roztęp Wariancja
, SJM PZŻ/8211,
 Nawigacja Tomasz Jarzębski Telefon: 501 892 942, Żeglarz: SJM PZŻ/8211, Instruktor PZŻ: MIŻ4334, Instruktor ISSA: Inland 00420, Instruktor ISSA: SEA 00394 http://www.pro-skippers.com/skipper/343 Po co?
Nawigacja Tomasz Jarzębski Telefon: 501 892 942, Żeglarz: SJM PZŻ/8211, Instruktor PZŻ: MIŻ4334, Instruktor ISSA: Inland 00420, Instruktor ISSA: SEA 00394 http://www.pro-skippers.com/skipper/343 Po co?
Trenuj przed sprawdzianem! Matematyka Test 4
 mię i nazwisko ucznia...................................................................... Klasa............... Numer w dzienniku.............. nformacja do zadań od 1. do 3. Historia telewizji w Polsce
mię i nazwisko ucznia...................................................................... Klasa............... Numer w dzienniku.............. nformacja do zadań od 1. do 3. Historia telewizji w Polsce
FD x GBB = AGDD + - : GHF - GC = GFH = = = GEF - GAI = FB
 LICZBY - punkty Liczby (-) s¹ porozrzucane w pewien okreœlony sposób. Jeœli wiesz, jak poruszaj¹ siê poszczególne figurki w szachach, (wystarczy jedna z nich), ³atwo odkryjesz ten system i uzupe³nisz brakuj¹ce
LICZBY - punkty Liczby (-) s¹ porozrzucane w pewien okreœlony sposób. Jeœli wiesz, jak poruszaj¹ siê poszczególne figurki w szachach, (wystarczy jedna z nich), ³atwo odkryjesz ten system i uzupe³nisz brakuj¹ce
I. LOGICZNE STRUKTURY DRZEWIASTE
 I LOGICZNE STRUKTURY DRZEWIASTE Analizując dany problem uzyskuje się zadanie projektowe w postaci pewnego zbioru danych Metoda morfologiczna, która została opracowana w latach 1938-1948 przez amerykańskiego
I LOGICZNE STRUKTURY DRZEWIASTE Analizując dany problem uzyskuje się zadanie projektowe w postaci pewnego zbioru danych Metoda morfologiczna, która została opracowana w latach 1938-1948 przez amerykańskiego
WYŻSZA SZKOŁA INFORMATYKI STOSOWANEJ I ZARZĄDZANIA
 TYPY GRAFÓW c.d. Graf nazywamy dwudzielnym, jeśli zbiór jego wierzchołków można podzielić na dwa rozłączne podzbiory, tak że żadne dwa wierzchołki należące do tego samego podzbioru nie są sąsiednie. G
TYPY GRAFÓW c.d. Graf nazywamy dwudzielnym, jeśli zbiór jego wierzchołków można podzielić na dwa rozłączne podzbiory, tak że żadne dwa wierzchołki należące do tego samego podzbioru nie są sąsiednie. G
1. Obliczenie SDR pojazdów silnikowych ogółem w punkcie pomiarowym typu P
 Załącznik nr 2 PRZYKŁAD OBLICZENIA SDR I RODZAJOWEJ STRUKTURY RUCHU W PUNKTACH POMIAROWYCH. Obliczenie SDR ogółem w punkcie pomiarowym typu P Zestawienie zbiorcze wyników z pomiarów przeprowadzonych w
Załącznik nr 2 PRZYKŁAD OBLICZENIA SDR I RODZAJOWEJ STRUKTURY RUCHU W PUNKTACH POMIAROWYCH. Obliczenie SDR ogółem w punkcie pomiarowym typu P Zestawienie zbiorcze wyników z pomiarów przeprowadzonych w
Podstawy Nawigacji. mapa nawigacyjna
 Podstawy Nawigacji mapa nawigacyjna Program wykładów: Istota, cele, zadania i rodzaje nawigacji. Podstawowe pojęcia i definicje z zakresu nawigacji. Morskie jednostki miar. Kierunki na morzu, rodzaje,
Podstawy Nawigacji mapa nawigacyjna Program wykładów: Istota, cele, zadania i rodzaje nawigacji. Podstawowe pojęcia i definicje z zakresu nawigacji. Morskie jednostki miar. Kierunki na morzu, rodzaje,
STROP. ceramiczno- elbetowy. ...budowanie w dobrym stylu CERAM 45B-200 45B-220 45B-220N
 ...budowanie w dobrym stylu STROP ceramiczno- elbetowy CERAM 45B-00 45B-0 45B-0N Stropy CERAM 45B s¹ nowoczesnym rozwi¹zaniem konstrukcyjnym dla budownictwa ogólnego mieszkaniowego i u ytecznoœci publicznej,
...budowanie w dobrym stylu STROP ceramiczno- elbetowy CERAM 45B-00 45B-0 45B-0N Stropy CERAM 45B s¹ nowoczesnym rozwi¹zaniem konstrukcyjnym dla budownictwa ogólnego mieszkaniowego i u ytecznoœci publicznej,
Liczby zespolone C := R 2.
 C := R 2. R 2 (a, b) = (a, 0) + (0, b) = a (1, 0) + b (0, 1). R C, R x (x, 0) C. i := (0, 1), 1 = (1, 0) (a, b) = a(1, 0) + b(0, 1) = a + bi. R 2 (a, b) = z = a + bi C. a- część rzeczywista liczby zespolonej
C := R 2. R 2 (a, b) = (a, 0) + (0, b) = a (1, 0) + b (0, 1). R C, R x (x, 0) C. i := (0, 1), 1 = (1, 0) (a, b) = a(1, 0) + b(0, 1) = a + bi. R 2 (a, b) = z = a + bi C. a- część rzeczywista liczby zespolonej
C O A C H I N G Oferta wspó³pracy
 C O A C H I N G Oferta wspó³pracy A n n a B a r a n Akredytowany Coach ICF Massimo Pracownia Psychologii Biznesu www.pracowniamassimo.pl a.baran@pracowniamassimo.pl tel. 604-193-438 C Z Y M J E S T C O
C O A C H I N G Oferta wspó³pracy A n n a B a r a n Akredytowany Coach ICF Massimo Pracownia Psychologii Biznesu www.pracowniamassimo.pl a.baran@pracowniamassimo.pl tel. 604-193-438 C Z Y M J E S T C O
Zagadnienia transportowe
 Mieczysław Połoński Zakład Technologii i Organizacji Robót Inżynieryjnych Wydział Inżynierii i Kształtowania Środowiska SGGW Zagadnienia transportowe Z m punktów odprawy ma być wysłany jednorodny produkt
Mieczysław Połoński Zakład Technologii i Organizacji Robót Inżynieryjnych Wydział Inżynierii i Kształtowania Środowiska SGGW Zagadnienia transportowe Z m punktów odprawy ma być wysłany jednorodny produkt
Efektywność nauczania w Gimnazjum w Lutyni
 Efektywność nauczania w Gimnazjum w Lutyni Efektywność nauczania w danej szkole często utożsamiana jest z jej wynikami egzaminacyjnymi. Gdyby wszystkie szkoły w Polsce pracowały z uczniami o tym samym
Efektywność nauczania w Gimnazjum w Lutyni Efektywność nauczania w danej szkole często utożsamiana jest z jej wynikami egzaminacyjnymi. Gdyby wszystkie szkoły w Polsce pracowały z uczniami o tym samym
Wielomiany. dr Tadeusz Werbiński. Teoria
 Wielomiany dr Tadeusz Werbiński Teoria Na początku przypomnimy kilka szkolnych definicji i twierdzeń dotyczących wielomianów. Autorzy podręczników szkolnych podają różne definicje wielomianu - dla jednych
Wielomiany dr Tadeusz Werbiński Teoria Na początku przypomnimy kilka szkolnych definicji i twierdzeń dotyczących wielomianów. Autorzy podręczników szkolnych podają różne definicje wielomianu - dla jednych
Seria 240 Zawór regulacyjny z szybko zamykaj¹cym si³ownikiem pneumatycznym dla gazów Typ 3241-1 dla gazu i typ 3241-7 dla gazu
 Seria 240 Zawór regulacyjny z szybko zamykaj¹cym si³ownikiem pneumatycznym dla gazów Typ 3241-1 dla gazu i typ 3241-7 dla gazu z atestem typu DIN-DVGW zgodnie z norm¹ DIN EN 161: 1996-08 Zastosowanie Zawór
Seria 240 Zawór regulacyjny z szybko zamykaj¹cym si³ownikiem pneumatycznym dla gazów Typ 3241-1 dla gazu i typ 3241-7 dla gazu z atestem typu DIN-DVGW zgodnie z norm¹ DIN EN 161: 1996-08 Zastosowanie Zawór
Przygotowanie do Egzaminu Potwierdzającego Kwalifikacje Zawodowe
 Przygotowanie do Egzaminu Potwierdzającego Kwalifikacje Zawodowe Powtórzenie materiału Opracował: mgr inż. Marcin Wieczorek Mierniki i wielkości mierzone do pomiaru różnych wielkości używa się szeregu
Przygotowanie do Egzaminu Potwierdzającego Kwalifikacje Zawodowe Powtórzenie materiału Opracował: mgr inż. Marcin Wieczorek Mierniki i wielkości mierzone do pomiaru różnych wielkości używa się szeregu
INFORMATYKA studia licencjackie*
 Uchwała Nr 38 Rady Wydziału Matematyki i Informatyki Uniwersytetu Mikołaja Kopernika w Toruniu z dnia 18 kwietnia 2012 roku w sprawie warunków i trybu rekrutacji na studia w roku 2013/2014 INFORMATYKA
Uchwała Nr 38 Rady Wydziału Matematyki i Informatyki Uniwersytetu Mikołaja Kopernika w Toruniu z dnia 18 kwietnia 2012 roku w sprawie warunków i trybu rekrutacji na studia w roku 2013/2014 INFORMATYKA
Marek Pękała H Z0. Rysunek 1
 E11. POMIAR POZIOMEJ KŁADOWEJ ZIEMKIEGO POLA MAGETYCZEGO Marek Pękała Igła magnetyczna kompasu jest dipolowym momentem magnetycznym M. wobodna igła magnetyczna ustawia się wzdłuż południka magnetycznego,
E11. POMIAR POZIOMEJ KŁADOWEJ ZIEMKIEGO POLA MAGETYCZEGO Marek Pękała Igła magnetyczna kompasu jest dipolowym momentem magnetycznym M. wobodna igła magnetyczna ustawia się wzdłuż południka magnetycznego,
analizy Kolejowe œrodki transportowe przewozów. intermodalnych Henryk Kulikowski, Adam Tu³ecki
 Henryk Kulikowski, Adam Tu³ecki Kolejowe œrodki transportowe do przewozów intermodalnych Strategia Unii Europejskiej, zmierzaj¹ca do rozwoju proekologicznych systemów transportowych, szczególn¹ rolê przypisuje
Henryk Kulikowski, Adam Tu³ecki Kolejowe œrodki transportowe do przewozów intermodalnych Strategia Unii Europejskiej, zmierzaj¹ca do rozwoju proekologicznych systemów transportowych, szczególn¹ rolê przypisuje
s n = a k (2) lim s n = S, to szereg (1) nazywamy zbieżnym. W przeciwnym przypadku mówimy, że szereg jest rozbieżny.
 lim s n = S, to szereg (1) nazywamy zbieżnym. W przeciwnym przypadku mówimy, że szereg jest rozbieżny.") Szeregi liczbowe Definicja Szeregiem liczbowym nazywamy wyrażenie a n = a + a 2 + a 3 + () Liczby a n, n =, 2,... nazywamy wyrazami szeregu. Natomiast sumę n s n = a k (2) nazywamy n-tą sumą częściową
Szeregi liczbowe Definicja Szeregiem liczbowym nazywamy wyrażenie a n = a + a 2 + a 3 + () Liczby a n, n =, 2,... nazywamy wyrazami szeregu. Natomiast sumę n s n = a k (2) nazywamy n-tą sumą częściową
Ć W I C Z E N I E N R E-2
 INSTYTUT FIZYKI WYDZIAŁ INŻYNIEII PODUKCJI I TECHNOLOGII MATEIAŁÓW POLITECHNIKA CZĘSTOCHOWSKA PACOWNIA ELEKTYCZNOŚCI I MAGNETYZMU Ć W I C Z E N I E N E-2 WYZNACZANIE OPOU ELEKTYCZNEGO METODĄ MOSTKA WHEATSTONE
INSTYTUT FIZYKI WYDZIAŁ INŻYNIEII PODUKCJI I TECHNOLOGII MATEIAŁÓW POLITECHNIKA CZĘSTOCHOWSKA PACOWNIA ELEKTYCZNOŚCI I MAGNETYZMU Ć W I C Z E N I E N E-2 WYZNACZANIE OPOU ELEKTYCZNEGO METODĄ MOSTKA WHEATSTONE
RZUTOWANIE AKSONOMETRYCZNE
 Zapis i Podstawy Konstrukcji Rzuty aksonometryczne 1 RZUTOWANIE AKSONOMETRYCZNE Rzuty aksonometryczne służą do poglądowego przedstawiania przedmiotów W metodzie aksonometrycznej rzutnią jest płaszczyzna
Zapis i Podstawy Konstrukcji Rzuty aksonometryczne 1 RZUTOWANIE AKSONOMETRYCZNE Rzuty aksonometryczne służą do poglądowego przedstawiania przedmiotów W metodzie aksonometrycznej rzutnią jest płaszczyzna
Podstawowe oddziaływania w Naturze
 Podstawowe oddziaływania w Naturze Wszystkie w zjawiska w Naturze są określone przez cztery podstawowe oddziaływania Silne Grawitacja Newton Elektromagnetyczne Słabe n = p + e - + ν neutron = proton +
Podstawowe oddziaływania w Naturze Wszystkie w zjawiska w Naturze są określone przez cztery podstawowe oddziaływania Silne Grawitacja Newton Elektromagnetyczne Słabe n = p + e - + ν neutron = proton +
Skanowanie trójwymiarowej przestrzeni pomieszczeñ
 AUTOMATYKA 2008 Tom 12 Zeszyt 3 S³awomir Je ewski*, Micha³ Jaros* Skanowanie trójwymiarowej przestrzeni pomieszczeñ 1. Wprowadzenie Obecnie w erze komputerów, które pozwalaj¹ na wizualizacje scen nie tylko
AUTOMATYKA 2008 Tom 12 Zeszyt 3 S³awomir Je ewski*, Micha³ Jaros* Skanowanie trójwymiarowej przestrzeni pomieszczeñ 1. Wprowadzenie Obecnie w erze komputerów, które pozwalaj¹ na wizualizacje scen nie tylko
Seria 3730 Elektropneumatyczne ustawniki pozycyjne typu 3730-1
 Seria 3730 Elektropneumatyczne ustawniki pozycyjne typu 3730-1 Zastosowanie Ustawnik pozycyjny jednostronnego lub dwustronnego dzia³ania, przeznaczony do wspó³pracy z zaworami regulacyjnymi wyposa onymi
Seria 3730 Elektropneumatyczne ustawniki pozycyjne typu 3730-1 Zastosowanie Ustawnik pozycyjny jednostronnego lub dwustronnego dzia³ania, przeznaczony do wspó³pracy z zaworami regulacyjnymi wyposa onymi
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Pełnienie wachty morskiej i portowej Oznaczenie kwalifikacji: A.39 Numer zadania:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Pełnienie wachty morskiej i portowej Oznaczenie kwalifikacji: A.39 Numer zadania:
W. Guzicki Zadanie 23 z Informatora Maturalnego poziom rozszerzony 1
 W. Guzicki Zadanie 3 z Informatora Maturalnego poziom rozszerzony 1 Zadanie 3. Rozwiąż równanie: sin 5x cos x + sin x = 0. W rozwiązaniach podobnych zadań często korzystamy ze wzorów trygonometrycznych
W. Guzicki Zadanie 3 z Informatora Maturalnego poziom rozszerzony 1 Zadanie 3. Rozwiąż równanie: sin 5x cos x + sin x = 0. W rozwiązaniach podobnych zadań często korzystamy ze wzorów trygonometrycznych
Temat: Funkcje. Własności ogólne. A n n a R a j f u r a, M a t e m a t y k a s e m e s t r 1, W S Z i M w S o c h a c z e w i e 1
 Temat: Funkcje. Własności ogólne A n n a R a j f u r a, M a t e m a t y k a s e m e s t r 1, W S Z i M w S o c h a c z e w i e 1 Kody kolorów: pojęcie zwraca uwagę * materiał nieobowiązkowy A n n a R a
Temat: Funkcje. Własności ogólne A n n a R a j f u r a, M a t e m a t y k a s e m e s t r 1, W S Z i M w S o c h a c z e w i e 1 Kody kolorów: pojęcie zwraca uwagę * materiał nieobowiązkowy A n n a R a
KARTA INFORMACYJNA ELEKTROMAGNESY NAPĘDOWE. TYP ES-2a i ES-2
 Producent : Spnia Inwalidów INMET 476 Kędzierzyn Kożle ul. Portowa 33 KARTA INFORMACYJNA ELEKTROMAGNESY NAPĘDOWE TYP ES2a i ES2 jednofazowe wnętrzowe bez obudowy 24 500 V 1780 W 50 Hz ZASTOSOWANIE : Do
Producent : Spnia Inwalidów INMET 476 Kędzierzyn Kożle ul. Portowa 33 KARTA INFORMACYJNA ELEKTROMAGNESY NAPĘDOWE TYP ES2a i ES2 jednofazowe wnętrzowe bez obudowy 24 500 V 1780 W 50 Hz ZASTOSOWANIE : Do
Mapa do zadań 1 3. urwiska. Zadanie 1 (1 p.) Oblicz, jaką odległość musi pokonać rowerzysta jadący drogą lokalną z punktu A do kościoła w Chęcinach.
 Oblicz, jaką odległość musi pokonać rowerzysta jadący drogą lokalną z punktu A do kościoła w Chęcinach.") Mapa do zadań 1 3 N A urwiska Zadanie 1 (1 p.) Oblicz, jaką odległość musi pokonać rowerzysta jadący drogą lokalną z punktu A do kościoła w Chęcinach. Odpowiedź:... Zadanie 2 (2 p.) Uzupełnij zdania. Najwyższą
Mapa do zadań 1 3 N A urwiska Zadanie 1 (1 p.) Oblicz, jaką odległość musi pokonać rowerzysta jadący drogą lokalną z punktu A do kościoła w Chęcinach. Odpowiedź:... Zadanie 2 (2 p.) Uzupełnij zdania. Najwyższą
Wyznaczanie charakterystyki widmowej kolorów z wykorzystaniem zapisu liczb o dowolnej precyzji
 AUTOMATYKA 2011 Tom 15 Zeszyt 3 Maciej Nowak*, Grzegorz Nowak* Wyznaczanie charakterystyki widmowej kolorów z wykorzystaniem zapisu liczb o dowolnej precyzji 1. Wprowadzenie 1.1. Kolory Zmys³ wzroku stanowi
AUTOMATYKA 2011 Tom 15 Zeszyt 3 Maciej Nowak*, Grzegorz Nowak* Wyznaczanie charakterystyki widmowej kolorów z wykorzystaniem zapisu liczb o dowolnej precyzji 1. Wprowadzenie 1.1. Kolory Zmys³ wzroku stanowi
tel: (0-71) 782 50 80 ul. Jana D³ugosza 19b/18 51-1 6 2 WROC AW WIERA
 782 50 80 ul. Jana D³ugosza 19b/18 51-1 6 2 WROC AW WIERA") www.domnahoryzoncie.pl tel: (0-71) 782 50 80 ul. Jana D³ugosza 19b/18 51-1 6 2 WROC AW biuro@domnahoryzoncie.pl WIERA strona 02 Instrukcja budowy makiety domu jednorodzinnego WIERA Postêpuj zgodnie z instrukcj¹.
www.domnahoryzoncie.pl tel: (0-71) 782 50 80 ul. Jana D³ugosza 19b/18 51-1 6 2 WROC AW biuro@domnahoryzoncie.pl WIERA strona 02 Instrukcja budowy makiety domu jednorodzinnego WIERA Postêpuj zgodnie z instrukcj¹.
RAMOWY PROGRAM SZKOLENIA I WYMAGANIA EGZAMINACYJNE NA POZIOMIE POMOCNICZYM W DZIALE POKŁADOWYM NA ŚWIADECTWO MARYNARZA WACHTOWEGO
 Załącznik nr 1 RAMOWY PROGRAM SZKOLENIA I WYMAGANIA EGZAMINACYJNE NA POZIOMIE POMOCNICZYM W DZIALE POKŁADOWYM NA ŚWIADECTWO MARYNARZA WACHTOWEGO Tabela zbiorcza Przedmiot Liczba godzin I II III IV V VI
Załącznik nr 1 RAMOWY PROGRAM SZKOLENIA I WYMAGANIA EGZAMINACYJNE NA POZIOMIE POMOCNICZYM W DZIALE POKŁADOWYM NA ŚWIADECTWO MARYNARZA WACHTOWEGO Tabela zbiorcza Przedmiot Liczba godzin I II III IV V VI
WYŚCIG MATEMATYCZNY INSTRUKCJA. gra edukacyjna dla 2-4 osób rekomendowany wiek: od lat 7
 INSTRUKCJA WYŚCIG MATEMATYCZNY gra edukacyjna dla 2-4 osób rekomendowany wiek: od lat 7 zawartość pudełka: 1) tabliczki - 64 szt. 2) pionek - 1 szt. 3) plansza 4) kostka 5) instrukcja 1 Po rozpakowaniu
INSTRUKCJA WYŚCIG MATEMATYCZNY gra edukacyjna dla 2-4 osób rekomendowany wiek: od lat 7 zawartość pudełka: 1) tabliczki - 64 szt. 2) pionek - 1 szt. 3) plansza 4) kostka 5) instrukcja 1 Po rozpakowaniu
Ćwiczenie nr 2 Zbiory rozmyte logika rozmyta Rozmywanie, wnioskowanie, baza reguł, wyostrzanie
 Ćwiczenie nr 2 Zbiory rozmyte logika rozmyta Rozmywanie, wnioskowanie, baza reguł, wyostrzanie 1. Wprowadzenie W wielu zagadnieniach dotyczących sterowania procesami technologicznymi niezbędne jest wyznaczenie
Ćwiczenie nr 2 Zbiory rozmyte logika rozmyta Rozmywanie, wnioskowanie, baza reguł, wyostrzanie 1. Wprowadzenie W wielu zagadnieniach dotyczących sterowania procesami technologicznymi niezbędne jest wyznaczenie
GIMNAZJUM. Kandydaci do gimnazjum przyjmowani są na podstawie:
 GIMNAZJUM Kandydaci do gimnazjum przyjmowani są na podstawie: 1) Zgłoszenia do gimnazjum, w obwodzie którego kandydat mieszka - przyjęty jest on z urzędu (dostarczenie zgłoszenia do szkoły jest równoznaczne
GIMNAZJUM Kandydaci do gimnazjum przyjmowani są na podstawie: 1) Zgłoszenia do gimnazjum, w obwodzie którego kandydat mieszka - przyjęty jest on z urzędu (dostarczenie zgłoszenia do szkoły jest równoznaczne
FOSTER SIGMA FOSTER MIKROPROCESOROWY REGULATOR TEMPERATURY KOT A MIA OWEGO INSTRUKCJA OBS UGI MIKROPROCESOROWEGO REGULATORA TEMPERATURY
 WSKAZÓWKI DOTYCZ CE BEZPIECZNEGO U YTKOWANIA 1. Regulator u ytkowaæ zgodnie z instrukcj¹ obs³ugi. 2. Nie wykonywaæ samodzielnie adnych napraw. Naprawy powierzyæ uprawnionemu do tego serwisowi technicznemu.
WSKAZÓWKI DOTYCZ CE BEZPIECZNEGO U YTKOWANIA 1. Regulator u ytkowaæ zgodnie z instrukcj¹ obs³ugi. 2. Nie wykonywaæ samodzielnie adnych napraw. Naprawy powierzyæ uprawnionemu do tego serwisowi technicznemu.
 Urszula ¹czyñska PROGRAM NAUCZANIA MATEMATYKI W ZASADNICZEJ SZKOLE ZAWODOWEJ MATEMATYKA DLA KA DEGO Dopuszczony przez Ministra Edukacji Narodowej do u ytku szkolnego Numer dopuszczenia: DKOS-4015-123/02
Urszula ¹czyñska PROGRAM NAUCZANIA MATEMATYKI W ZASADNICZEJ SZKOLE ZAWODOWEJ MATEMATYKA DLA KA DEGO Dopuszczony przez Ministra Edukacji Narodowej do u ytku szkolnego Numer dopuszczenia: DKOS-4015-123/02
E6. BADANIE ELEMENTÓW PÓŁPRZEWODNIKOWYCH
 6. ADANI LMNTÓW PÓŁPZWODNIKOWYH tekst opracowała: ożena Janowska-Dmoch Diody i tranzystory półprzewodnikowe są podstawowymi aktywnymi elementami we współczesnej elektronice. Znalazły wiele zastosowań i
6. ADANI LMNTÓW PÓŁPZWODNIKOWYH tekst opracowała: ożena Janowska-Dmoch Diody i tranzystory półprzewodnikowe są podstawowymi aktywnymi elementami we współczesnej elektronice. Znalazły wiele zastosowań i
micro Programator ISP mikrokontrolerów AVR zgodny z AVRISP mkii Opis Obs³ugiwane mikrokontrolery Wspó³praca z programami Podstawowe w³aœciwoœci - 1 -
 mk II Programator ISP mikrokontrolerów AVR zgodny z AVRISP mkii Opis Programator mk II jest programatorem mikrokontrolerów AVR. Posiada interfejs USB, s³u ¹cy do komunikacji oraz zasilania programatora
mk II Programator ISP mikrokontrolerów AVR zgodny z AVRISP mkii Opis Programator mk II jest programatorem mikrokontrolerów AVR. Posiada interfejs USB, s³u ¹cy do komunikacji oraz zasilania programatora
Test całoroczny z matematyki. Wersja A
 Test całoroczny z matematyki klasa IV Wersja A Na kartce masz zapisanych 20 zadań. Opuść więc te, których rozwiązanie okaże się zbyt trudne dla Ciebie. Wrócisz do niego później. W niektórych zadaniach
Test całoroczny z matematyki klasa IV Wersja A Na kartce masz zapisanych 20 zadań. Opuść więc te, których rozwiązanie okaże się zbyt trudne dla Ciebie. Wrócisz do niego później. W niektórych zadaniach
Informacje techniczne dla projektantów
 nformacje techniczne dla projektantów Graniczny przyrost temperatury urządzeń z bezpiecznikami wg norm EC/EN 0 97, wzg.vde00 część 00 a) Graniczny przyrost temperatury styków (kontaktów) Rodzaj styków
nformacje techniczne dla projektantów Graniczny przyrost temperatury urządzeń z bezpiecznikami wg norm EC/EN 0 97, wzg.vde00 część 00 a) Graniczny przyrost temperatury styków (kontaktów) Rodzaj styków
Plan naprawczy. Sokółka 2006/2007. Opracowanie: Urszula Bronowicz Henryka Sarosiek ElŜbieta Plichta Katarzyna Dykiel Tomasz Mucuś
 Plan naprawczy przyjęty do realizacji w klasach VI-tych po wykonaniu analizy wyników próbnego sprawdzianu Na grzyby przeprowadzonego 10 października 2006 roku Opracowanie: Urszula Bronowicz Henryka Sarosiek
Plan naprawczy przyjęty do realizacji w klasach VI-tych po wykonaniu analizy wyników próbnego sprawdzianu Na grzyby przeprowadzonego 10 października 2006 roku Opracowanie: Urszula Bronowicz Henryka Sarosiek
RADIONAMIARY. zasady, sposoby, kalibracja, błędy i ograniczenia
 RADIONAMIARY zasady, sposoby, kalibracja, błędy i ograniczenia 1 Radionamierzanie jest to: Określenie kąta, zawartego między północną częścią lokalnego południka geograficznego a kierunkiem na dany obiekt,
RADIONAMIARY zasady, sposoby, kalibracja, błędy i ograniczenia 1 Radionamierzanie jest to: Określenie kąta, zawartego między północną częścią lokalnego południka geograficznego a kierunkiem na dany obiekt,
Sposoby przystosowania urządzeń elektrycznych zamontowanych w obiekcie szklarniowym do komputera klimatycznego Netagrow
 Netafim Irygacja Sp. z o.o 96-100 Skierniewice ul.rybickiego 10 tel (46) 832-32-01 (46) 833-22-66 601-34-56-93 Sposoby przystosowania urządzeń elektrycznych zamontowanych w obiekcie szklarniowym do komputera
Netafim Irygacja Sp. z o.o 96-100 Skierniewice ul.rybickiego 10 tel (46) 832-32-01 (46) 833-22-66 601-34-56-93 Sposoby przystosowania urządzeń elektrycznych zamontowanych w obiekcie szklarniowym do komputera
Uniwersytet Warszawski Teoria gier dr Olga Kiuila LEKCJA 5
 Ad przykład: Stonoga LEKCJA 5 SPNE: każdy gracz zaakceptuje propozycje przyjęcia dowolnej sumy w każdym okresie (czyli każdy gracz wierze, że rywal skończy grę w następnym kroku) Interpretacja gry Stonoga:
Ad przykład: Stonoga LEKCJA 5 SPNE: każdy gracz zaakceptuje propozycje przyjęcia dowolnej sumy w każdym okresie (czyli każdy gracz wierze, że rywal skończy grę w następnym kroku) Interpretacja gry Stonoga:
STA T T A YSTYKA Korelacja
 STATYSTYKA Korelacja Pojęcie korelacji Korelacja (współzależność cech) określa wzajemne powiązania pomiędzy wybranymi zmiennymi. Charakteryzując korelację dwóch cech podajemy dwa czynniki: kierunek oraz
STATYSTYKA Korelacja Pojęcie korelacji Korelacja (współzależność cech) określa wzajemne powiązania pomiędzy wybranymi zmiennymi. Charakteryzując korelację dwóch cech podajemy dwa czynniki: kierunek oraz
Podrêcznik praktyka nr 6. Wydawca: GEALAN - Dzia³ doradztwa dla architektów. Statyka. Wymiarowanie okien i fasad. Statyka
 Podrêcznik praktyka nr 6 Wydawca: GEALAN - Dzia³ doradztwa dla architektów Wymiarowanie okien i fasad 3 Stan: kwiecieñ 2004 4 Przedruk i powielanie, choæby czêœciowe, tylko za naszym pozwoleniem. Wszelkie
Podrêcznik praktyka nr 6 Wydawca: GEALAN - Dzia³ doradztwa dla architektów Wymiarowanie okien i fasad 3 Stan: kwiecieñ 2004 4 Przedruk i powielanie, choæby czêœciowe, tylko za naszym pozwoleniem. Wszelkie
Kurs wyrównawczy dla kandydatów i studentów UTP
 Kurs wyrównawczy dla kandydatów i studentów UTP Część III Funkcja wymierna, potęgowa, logarytmiczna i wykładnicza Magdalena Alama-Bućko Ewa Fabińska Alfred Witkowski Grażyna Zachwieja Uniwersytet Technologiczno
Kurs wyrównawczy dla kandydatów i studentów UTP Część III Funkcja wymierna, potęgowa, logarytmiczna i wykładnicza Magdalena Alama-Bućko Ewa Fabińska Alfred Witkowski Grażyna Zachwieja Uniwersytet Technologiczno
AKTYWNY WYPOCZYNEK POD ŻAGLAMI szkolenia, rejsy, obozy żeglarskie
 AKTYWNY WYPOCZYNEK POD ŻAGLAMI szkolenia, rejsy, obozy żeglarskie www.jachty.org Podczas kursu przekażemy Państwu wiedzę i umiejętności zawarte w niżej prezentowanym programie szkolenia PZŻ. PROGRAM SZKOLENIA
AKTYWNY WYPOCZYNEK POD ŻAGLAMI szkolenia, rejsy, obozy żeglarskie www.jachty.org Podczas kursu przekażemy Państwu wiedzę i umiejętności zawarte w niżej prezentowanym programie szkolenia PZŻ. PROGRAM SZKOLENIA