Młody inżynier robotyki
|
|
|
- Roman Kozieł
- 9 lat temu
- Przeglądów:
Transkrypt
1 Młody inżynier robotyki

2 Narzędzia pracy

3 Klocki LEGO MINDSTORMS NXT
4 Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0

5 LEGO Digital Designer - program przeznaczony do tworzenia komputerowych modeli z klocków LEGO

6 Klocki pierwsze spotkanie LEGO Mindstorms to zestaw zawierający programowalną kostkę LEGO, serwomotory, sensory dotyku, kolorów, dalmierz ultradźwiękowy oraz zestaw klocków Technic.

7 Klocki pierwsze spotkanie Mindstorms to połączenie LEGO Technic i komputera. Klocki to nie tylko zabawka to potężne narzędzie w rękach inteligentnego konstruktora.

8 Klocki pierwsze spotkanie Mindstorms to połączenie LEGO Technic i komputera. Klocki to nie tylko zabawka to potężne narzędzie w rękach inteligentnego konstruktora.

9 Podstawowe typy klocków


10 Klocek belka Podstawowy klocek konstrukcyjny belka, posiada nieparzystą liczbę oczek od 3 do 15


11 Osie Służą m.in. do konstrukcji elementów ruchomych Są różnych długości, ich długość będziemy odróżniać porównując je do zwykłych belek: Czarne odpowiada parzystej liczbie oczek Szare odpowiada nieparzystej liczbie oczek

12 Piny (kołki) Do tworzenia konstrukcji ruchomych: - kołek ślizgowy Do tworzenia konstrukcji nieruchomych: - kołek cierny

13 Inne: Potrójne piny - sztywne Dystanse: - długie - krótkie - ruchome

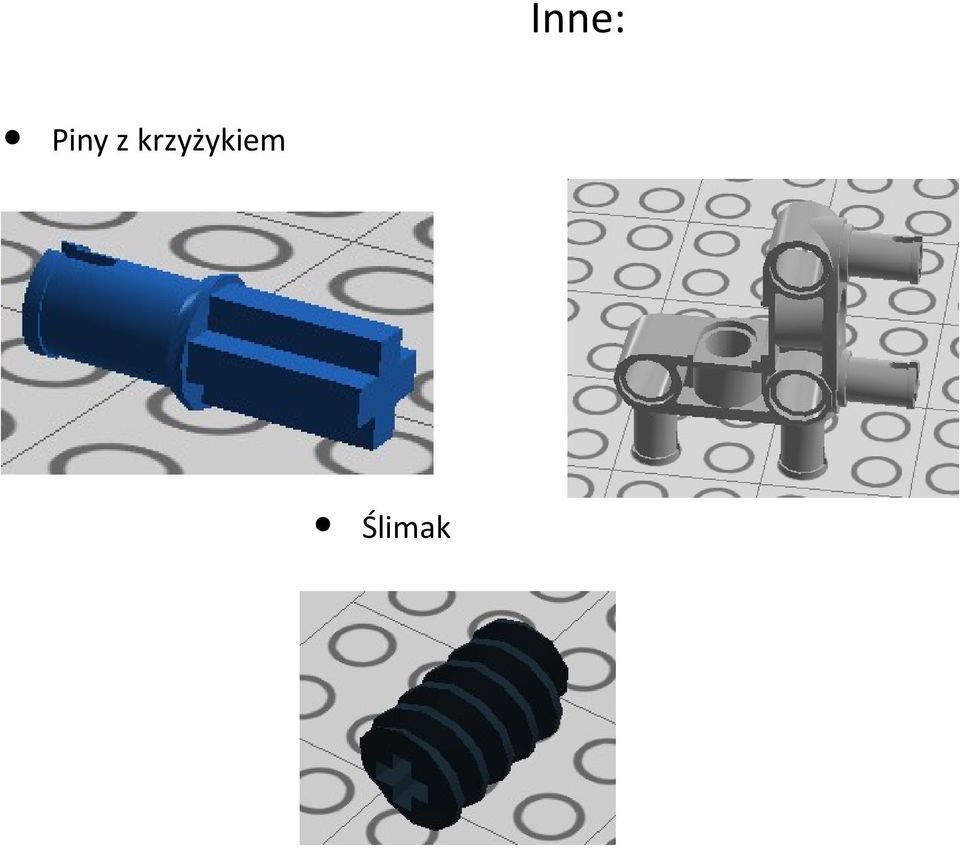
14 Inne: Piny z krzyżykiem Ślimak
15 Kwadrat
16 Trójkąt równoboczny

 Mała (8")
17 Koła zębate (zębatki) Duża (24 zęby) Mała (8 zębów)
 Mała")
18 Przekładnia mechaniczna Mechanizm służący do przenoszenia energii, zazwyczaj wraz ze zmianą prędkości obrotowej i momentu

19 Przekładnia zębata równoległa

20 Kręcimy dużym kołem i liczymy obroty małego


21 Współczynnik przełożenia Jak obliczyć współczynnik przełożenia? U nas: N = 24 / 8 = 3 Liczymy ilość ząbków na kole większym i dzielimy ją przez ilość ząbków na kole mniejszym.
22 Przekładnia złożona równoległa
23 Przekładnia złożona równoległa z ramionami
24 Ile tym razem zyskujemy obrotów kręcąc dużym kołem Każda para przełożeń (miejsca gdzie stykają się zębatki) to zysk 3 razy Aby obliczyć ostateczny współczynnik takiej przekładni złożonej przełożenia mnożymy przez siebie współczynniki przełożeń z kolejnych przekładni pojedynczych: 3*3=9
25 Przyczyny zastosowania przekładni Funkcjonalne: konieczność dostosowania prędkości obrotowej napędu do maszyny roboczej, zmiana kierunku obrotów maszyny, wymagany jest większy moment niż jest w stanie wytworzyć silnik
26 Przyczyny zastosowania przekładni Konstrukcyjne: konieczność przeniesienia napędu na pewną odległość (silnik musi być oddalony od układu roboczego), zmniejszenie gabarytu maszyny poprzez ustawienie równoległe silnika i układu roboczego
27 Przyczyny zastosowania przekładni Ekonomiczne: możliwość zastosowania jednego układu napędowego do kilku układów roboczych, możliwość zastosowania tańszego silnika z przekładnią wielostopniową dla uzyskania większego zakresu prędkości maszyny roboczej
28
29 Przekładnia kątowa I
30 Przekładnia kątowa II
31 Przekładnia kątowa III
32 Przekładnia kątowa IV
33 Klatka
34 Klatka z przekątną ściany bocznej
35 Przekładnia ślimakowa Przekładnia składająca się z koła zębatego i ślimaka (wirnika śrubowego)
36 Przekładnia ślimakowa I
37 Przekładnia I ulepszona
38 Własności przekładni ślimakowej Czy można kręcić dwoma ramionami? Nie, ramię z zębatką jest zablokowane można kręcić jedynie tym ze ślimakiem Ile obrotów ślimakiem da jeden obrót zębatką? 8, czyli tyle ile zębów ma zębatka
39 Współczynnik przełożenia przekładni ślimakowej Przekładnie ślimakowe mają bardzo duży współczynnik przełożenia gdyż w obliczeniach ślimak traktuje się jako koło zębate z jednym ząbkiem. Mając więc przekładnie ślimakową mającą ślimacznice (koło zębate przyłożone do wirnika śrubowego) złożoną np. z 8 ząbków to N = 8 / 1 = 8.
40 Przekładnia ślimakowa II
41 Przekładnia ślimakowa II z ramionami
42 Przekładnia ślimakowa z zębatkową
43 Obliczmy, ile tym razem musimy kręcić ślimakiem, aby otrzymać jeden obrót końcowej zębatki? Aby obliczyć współczynnik przełożenia dla tego modelu musimy zauważyć, że mamy dwa styki zębatek - ślimak zębatka 24 zębna (N = 24), - 3* 24 = 72 zębatka 8 zębna zębatka 24 zębna (N = 3)
44 Koła
45 Mechanizm różnicowy
46 Mechanizm różnicowy (przekładnia różnicowa, dyferencjał)
47 Mechanizm różnicowy (przekładnia różnicowa, dyferencjał) Mechanizm różnicowy w pojazdach ma za zadanie kompensację różnicy prędkości obrotowej półosi kół osi napędowej podczas pokonywania przez nie torów o różnych długościach
48 Pierwszy robot
49 Tryb przewodnika po budowaniu instrukcja obsługi
50 Klocek NXT Klocek NXT, lub po prostu NXT, jest niewielkim komputerem, który kontroluje silniki i sensory, dzięki czemu robot może samodzielnie wykonywać zadania.
51 Typy przewodów Podstawowy zestaw roboczy składa się z trzech typów przewodów: - krótkiego (20 cm), czterech średnich (35 cm), dwóch długich (50 cm).
52 Sterowanie za pomocą przycisków klocka NXT
Wyznaczenie równowagi w mechanizmie. Przykład 6
 Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
ności od kinematyki zazębie
 Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
WZORU UŻYTKOWEGO (,9,PL <1» 63238
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
Podstawy Konstrukcji Maszyn. Wykład nr. 13 Przekładnie zębate
 Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym
 Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Stanowisko napędów mechanicznych
 Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
SPRZĘGŁA MIMOŚRODOWE INKOMA TYP KWK Inkocross
 - 2 - Spis treści 1.1 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje ogólne... - 3-1.2 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje techniczne... - 4-1.3 Sprzęgło mimośrodowe
- 2 - Spis treści 1.1 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje ogólne... - 3-1.2 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje techniczne... - 4-1.3 Sprzęgło mimośrodowe
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
MECHANIKI. Laboratorium SAMOCHÓD WYŚCIGOWY. Konstrukcje od 1 do 30
 4 Laboratorium MECHANIKI SAMOCHÓD WYŚCIGOWY Konstrukcje od 1 do 0 1 -Montaż dwóch belek -Montaż belek z zastosowaniem dwóch gwoździ -Łączenie belek 4 -Montaż trzech belek 5 -Prostopadłe złożenie belek
4 Laboratorium MECHANIKI SAMOCHÓD WYŚCIGOWY Konstrukcje od 1 do 0 1 -Montaż dwóch belek -Montaż belek z zastosowaniem dwóch gwoździ -Łączenie belek 4 -Montaż trzech belek 5 -Prostopadłe złożenie belek
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Operacja technologiczna to wszystkie czynności wykonywane na jednym lub kilku przedmiotach.
 Temat 23 : Proces technologiczny i planowanie pracy. (str. 30-31) 1. Pojęcia: Proces technologiczny to proces wytwarzania towarów wg przepisów. Jest to zbiór czynności zmieniających właściwości fizyczne
Temat 23 : Proces technologiczny i planowanie pracy. (str. 30-31) 1. Pojęcia: Proces technologiczny to proces wytwarzania towarów wg przepisów. Jest to zbiór czynności zmieniających właściwości fizyczne
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Spis treści. Przedmowa 11
 Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174823 (13) B1
 OPIS PATENTOWY (19) PL (11) 174823 (13) B1") RZECZPOSPOLITAPOLSKA (12) OPIS PATENTOWY (19) PL (11) 174823 (13) B1 (21) Numer zgłoszenia: 306627 Urząd Patentowy (22) Data zgłoszenia: 29.12.1994 Rzeczypospolitej Polskiej (51)IntCl6: B23B 39/02 B23B
RZECZPOSPOLITAPOLSKA (12) OPIS PATENTOWY (19) PL (11) 174823 (13) B1 (21) Numer zgłoszenia: 306627 Urząd Patentowy (22) Data zgłoszenia: 29.12.1994 Rzeczypospolitej Polskiej (51)IntCl6: B23B 39/02 B23B
PL B1. HIKISZ BARTOSZ, Łódź, PL BUP 05/07. BARTOSZ HIKISZ, Łódź, PL WUP 01/16. rzecz. pat.
 PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
emko Zakretarki Dynamometryczne Akumulatorowe EBS 200 EBS 500 EBS 800 EBS 1300 EBS 2600 narzędzia warsztatowe hydraulika siłowa
 emko narzędzia warsztatowe hydraulika siłowa Zakretarki Dynamometryczne Akumulatorowe EBS 200 EBS 500 EBS 800 EBS 1300 EBS 2600 Zakrętarki Akumulatorowe Klucze EBS zostały stworzone w odpowiedzi na specyficzne
emko narzędzia warsztatowe hydraulika siłowa Zakretarki Dynamometryczne Akumulatorowe EBS 200 EBS 500 EBS 800 EBS 1300 EBS 2600 Zakrętarki Akumulatorowe Klucze EBS zostały stworzone w odpowiedzi na specyficzne
PL B1. ŻBIKOWSKI JERZY, Zielona Góra, PL BUP 03/06. JERZY ŻBIKOWSKI, Zielona Góra, PL WUP 09/11 RZECZPOSPOLITA POLSKA
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate
 Wykład 3 Analiza kinematyczna przekładnie zębate") Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate Lublin 2017 Dr inż. Łukasz Jedliński
Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate Lublin 2017 Dr inż. Łukasz Jedliński
Układ kierowniczy. Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek:
 1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
Szkoła Młodego Inżyniera - OFERTA
 2010 Szkoła Młodego Inżyniera - OFERTA RoboNET Wspólnie zmieniamy edukację w Polsce! IDEA ZAJĘĆ ROBOCAMP RoboCAMP to zajęcia, podczas których dzieci w wieku od 8 do 14 lat poznają tajniki robotyki i programowania,
2010 Szkoła Młodego Inżyniera - OFERTA RoboNET Wspólnie zmieniamy edukację w Polsce! IDEA ZAJĘĆ ROBOCAMP RoboCAMP to zajęcia, podczas których dzieci w wieku od 8 do 14 lat poznają tajniki robotyki i programowania,
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
NIEOFICJALNY PRZEWODNIK KONSTRUKTORA LEGO TECHNIC
 Paweł Sariel Kmieć NIEOFICJALNY PRZEWODNIK KONSTRUKTORA LEGO TECHNIC WYDANIE DRUGIE Przekład: Maria Chaniewska APN Promise, Warszawa 2018 skrócony spis treści część I przedmowa... xvii podziękowania...
Paweł Sariel Kmieć NIEOFICJALNY PRZEWODNIK KONSTRUKTORA LEGO TECHNIC WYDANIE DRUGIE Przekład: Maria Chaniewska APN Promise, Warszawa 2018 skrócony spis treści część I przedmowa... xvii podziękowania...
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Cel i zakres ćwiczenia
 MIKROMECHANIZMY I MIKRONAPĘDY 2 - laboratorium Ćwiczenie nr 5 Druk 3D oraz charakteryzacja mikrosystemu Cel i zakres ćwiczenia Celem ćwiczenia jest charakteryzacja geometryczna wykonanego w ćwiczeniu 1
MIKROMECHANIZMY I MIKRONAPĘDY 2 - laboratorium Ćwiczenie nr 5 Druk 3D oraz charakteryzacja mikrosystemu Cel i zakres ćwiczenia Celem ćwiczenia jest charakteryzacja geometryczna wykonanego w ćwiczeniu 1
Wszystkie znaki występujące w tekście są zastrzeżonymi znakami firmowymi bądź towarowymi ich właścicieli.
 Tytuł oryginału: The LEGO MINDSTORMS EV3 Idea Book Tłumaczenie: Dorota Konowrocka-Sawa ISBN: 978-83-283-1246-3 Copyright 2015 by Yoshihito Isogawa. Title of English-language original: The LEGO MINDSTORMS
Tytuł oryginału: The LEGO MINDSTORMS EV3 Idea Book Tłumaczenie: Dorota Konowrocka-Sawa ISBN: 978-83-283-1246-3 Copyright 2015 by Yoshihito Isogawa. Title of English-language original: The LEGO MINDSTORMS
PL B1. POLITECHNIKA ŚLĄSKA, Gliwice, PL
 PL 214302 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 214302 (21) Numer zgłoszenia: 379747 (22) Data zgłoszenia: 22.05.2006 (13) B1 (51) Int.Cl.
PL 214302 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 214302 (21) Numer zgłoszenia: 379747 (22) Data zgłoszenia: 22.05.2006 (13) B1 (51) Int.Cl.
PL B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL BUP 12/14. ANTONI SZUMANOWSKI, Warszawa, PL PAWEŁ KRAWCZYK, Ciechanów, PL
 PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 14/14. BARTOSZ WIECZOREK, Poznań, PL MAREK ZABŁOCKI, Poznań, PL
 PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
PL B1. ANIOŁ KAZIMIERZ PRZEDSIĘBIORSTWO PRODUKCYJNO-USŁUGOWO-HANDLOWE AKPIL, Pilzno, PL BUP 25/
 PL 212465 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212465 (13) B1 (21) Numer zgłoszenia: 379844 (51) Int.Cl. E01H 5/09 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 212465 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212465 (13) B1 (21) Numer zgłoszenia: 379844 (51) Int.Cl. E01H 5/09 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
lider projektu: finansowanie:
 lider projektu: finansowanie: - zapoznanie się z możliwościami budowania programów w Lego Mindstorms EV3 - budowa prostego robota z jednym silnikiem i jednym czujnikiem - naładowane zestawy Lego Mindstorms
lider projektu: finansowanie: - zapoznanie się z możliwościami budowania programów w Lego Mindstorms EV3 - budowa prostego robota z jednym silnikiem i jednym czujnikiem - naładowane zestawy Lego Mindstorms
INSTRUKCJA DO ĆWICZENIA NR 2. Analiza kinematyczna napędu z przekładniami
 INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
SZKOŁA POLICEALNA dla dorosłych
 SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
PL B1. NOWAK ANDRZEJ, Terebiń, PL BUP 17/16. ANDRZEJ NOWAK, Terebiń, PL WUP 12/17. rzecz. pat.
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227579 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 415255 (22) Data zgłoszenia: 11.12.2015 (51) Int.Cl. E21B 7/02 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227579 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 415255 (22) Data zgłoszenia: 11.12.2015 (51) Int.Cl. E21B 7/02 (2006.01)
Lekcja budowania robotów na podstawie klocków LEGO Mindstorms NXT 2.0. Temat: GrabBot Budujemy robota, który przenosi przedmioty.
 Lekcja budowania robotów na podstawie klocków LEGO Mindstorms NXT 2.0 Temat: GrabBot Budujemy robota, który przenosi przedmioty. Działanie robota GrabBot to robot mobilny o napędzie gąsienicowym, co daje
Lekcja budowania robotów na podstawie klocków LEGO Mindstorms NXT 2.0 Temat: GrabBot Budujemy robota, który przenosi przedmioty. Działanie robota GrabBot to robot mobilny o napędzie gąsienicowym, co daje
Przekładnie zębate - cel
 Prekładnie ębate Prekładnie ębate - cel V M Prekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Preniesienie ruchu jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej Podiał kryterium: układ osi
Prekładnie ębate Prekładnie ębate - cel V M Prekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Preniesienie ruchu jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej Podiał kryterium: układ osi
PL B1. FILA ANTONI POLSKA FABRYKA WODOMIERZY I CIEPŁOMIERZY FILA, Sztum, PL BUP 25/ WUP 07/12. ANTONI FILA, Czernin, PL
 PL 211989 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211989 (13) B1 (21) Numer zgłoszenia: 382543 (51) Int.Cl. G01F 1/06 (2006.01) G01F 15/07 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 211989 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211989 (13) B1 (21) Numer zgłoszenia: 382543 (51) Int.Cl. G01F 1/06 (2006.01) G01F 15/07 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
WYDZIAŁ ZARZĄDZANIA PODSTAWY TECHNIKI I TECHNOLOGII
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ZARZĄDZANIA KATEDRA ZARZĄDZANIA PRODUKCJĄ Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY TECHNIKI I TECHNOLOGII Kod przedmiotu: ISO1123, I NO1123 Numer ćwiczenia:
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ZARZĄDZANIA KATEDRA ZARZĄDZANIA PRODUKCJĄ Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY TECHNIKI I TECHNOLOGII Kod przedmiotu: ISO1123, I NO1123 Numer ćwiczenia:
PL B1. Fabryka Aparatury Pomiarowej PAFAL Spółka Akcyjna,Świdnica,PL BUP 02/03
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 200169 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 348784 (22) Data zgłoszenia: 17.07.2001 (51) Int.Cl. G06M 3/00 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 200169 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 348784 (22) Data zgłoszenia: 17.07.2001 (51) Int.Cl. G06M 3/00 (2006.01)
WZORU UŻYTKOWEGO PL Y1 B62K 5/04 ( ) Białoń Leszek, Nowy Sącz, PL BUP 22/07. Leszek Białoń, Nowy Sącz, PL
 Białoń Leszek, Nowy Sącz, PL BUP 22/07. Leszek Białoń, Nowy Sącz, PL") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 116072 (22) Data zgłoszenia: 19.04.2006 (19) PL (11) 64106 (13) Y1 (51) Int.Cl.
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 116072 (22) Data zgłoszenia: 19.04.2006 (19) PL (11) 64106 (13) Y1 (51) Int.Cl.
ogólna charakterystyka
 PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
KATEDRA TECHNIK WYTWARZANIA I AUTOMATYZACJI
 KATEDRA TECHIK WYTWARZAIA I AUTOMATYZACJI ISTRUKCJA DO ĆWICZEŃ LABORATORYJYCH Przedmiot: MASZYY TECHOLOGICZE Temat: Frezarka wspornikowa UFM 3 Plus r ćwiczenia: 2 Kierunek: Mechanika i budowa maszyn 1.
KATEDRA TECHIK WYTWARZAIA I AUTOMATYZACJI ISTRUKCJA DO ĆWICZEŃ LABORATORYJYCH Przedmiot: MASZYY TECHOLOGICZE Temat: Frezarka wspornikowa UFM 3 Plus r ćwiczenia: 2 Kierunek: Mechanika i budowa maszyn 1.
OSIE ELEKTRYCZNE SERII SHAK GANTRY
 OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
LABORATORIUM DYNAMIKI MASZYN. Redukcja momentów bezwładności do określonego punktu redukcji
 LABORATORIUM DYNAMIKI MASZYN Wydział Budowy Maszyn i Zarządzania Kierunek: Mechanika i Budowa Maszyn Zakład Wibroakustyki i Bio-Dynamiki Systemów Ćwiczenie nr 2 Redukcja momentów bezwładności do określonego
LABORATORIUM DYNAMIKI MASZYN Wydział Budowy Maszyn i Zarządzania Kierunek: Mechanika i Budowa Maszyn Zakład Wibroakustyki i Bio-Dynamiki Systemów Ćwiczenie nr 2 Redukcja momentów bezwładności do określonego
Laboratorium Maszyny CNC. Nr 3
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
Badanie wpływu obciążenia na sprawność przekładni falowej
 Zakład Podstaw Konstrukcji i Eksploatacji Maszyn Instytut Podstaw Budowy Maszyn Wydział Samochodów i Maszyn Roboczych Politechnika Warszawska dr inż. Benedykt Ponder dr inż. Szymon Dowkontt Laboratorium
Zakład Podstaw Konstrukcji i Eksploatacji Maszyn Instytut Podstaw Budowy Maszyn Wydział Samochodów i Maszyn Roboczych Politechnika Warszawska dr inż. Benedykt Ponder dr inż. Szymon Dowkontt Laboratorium
Zwolnice przekładnie boczne
 Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
(13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 B23K 7/10 RZECZPOSPOLITA POLSKA. Urząd Patentowy Rzeczypospolitej Polskiej
 B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 B23K 7/10 RZECZPOSPOLITA POLSKA. Urząd Patentowy Rzeczypospolitej Polskiej") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175070 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306629 Data zgłoszenia: 29.12.1994 (51) IntCl6: B23K 7/10 (54) Przecinarka
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175070 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306629 Data zgłoszenia: 29.12.1994 (51) IntCl6: B23K 7/10 (54) Przecinarka
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN. Ćwiczenie OB-2 BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ
 POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie OB-2 Temat: BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ Opracował: mgr inż. St. Sucharzewski Zatwierdził: prof.
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie OB-2 Temat: BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ Opracował: mgr inż. St. Sucharzewski Zatwierdził: prof.
ZADANIA PRZYGOTOWAWCZE POWIATOWY KONKURS MATEMATYCZNY SZKÓŁ PODSTAWOWYCH
 1. Zadanie najłatwiej rozwiązać od tyłu 210:3=70 Trzeci koszyk 70-16=54 Drugi koszyk 70+16-6=80 Pierwszy koszyk 70+6=76 Odp: 76, 80, 54. 2. 200-144= 56km 12-8=4l 144 8=18 Potrzebuje jeszcze 56 18=3,(1)
1. Zadanie najłatwiej rozwiązać od tyłu 210:3=70 Trzeci koszyk 70-16=54 Drugi koszyk 70+16-6=80 Pierwszy koszyk 70+6=76 Odp: 76, 80, 54. 2. 200-144= 56km 12-8=4l 144 8=18 Potrzebuje jeszcze 56 18=3,(1)
MECHANIKI. Laboratorium. Konstrukcje od 1 do 35
 5 6 7 8 9 0 5 6 7 9 0 5 6 7 8 9 0 5 Laboratorium MECHANIKI Konstrukcje od do 5 Motaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek
5 6 7 8 9 0 5 6 7 9 0 5 6 7 8 9 0 5 Laboratorium MECHANIKI Konstrukcje od do 5 Motaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Moment obrotowy i moc silnika a jego obciążenie (3)
") Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Struktura małego teleskopu typu Daviesa-Cottona oraz prototyp zwierciadeł w opracowaniu IFJ PAN
 Struktura małego teleskopu typu Daviesa-Cottona oraz prototyp zwierciadeł w opracowaniu IFJ PAN J. Michałowski, M. Dyrda, J. Niemiec, M. Stodulski, P. Ziółkowski, P. Żychowski Instytut Fizyki Jądrowej
Struktura małego teleskopu typu Daviesa-Cottona oraz prototyp zwierciadeł w opracowaniu IFJ PAN J. Michałowski, M. Dyrda, J. Niemiec, M. Stodulski, P. Ziółkowski, P. Żychowski Instytut Fizyki Jądrowej
STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ
 Postępy Nauki i Techniki nr 12, 2012 Jakub Lisiecki *, Paweł Rosa *, Szymon Lisiecki * STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ Streszczenie.
Postępy Nauki i Techniki nr 12, 2012 Jakub Lisiecki *, Paweł Rosa *, Szymon Lisiecki * STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ Streszczenie.
Przenośniki Układy napędowe
 Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia. Podstawy konstrukcji maszyn II
 modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia. Podstawy konstrukcji maszyn II") Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia Przedmiot: Podstawy konstrukcji maszyn II Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MBM S 0 5 52-0_ Rok: III Semestr:
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia Przedmiot: Podstawy konstrukcji maszyn II Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MBM S 0 5 52-0_ Rok: III Semestr:
PRZEKŁADNIE ZĘBATE. Przekł. o osiach stałych. Przekładnie obiegowe. Planetarne: W=1 Różnicowe i sumujące: W>1
 PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ŁAŃCUCHOWE
 PRZEKŁADNIE ŁAŃCUCHOWE Przekładnie łańcuchowe znajdują zastosowanie ( szczególnie przy dużych odległościach osi ) do przenoszenia mocy, jako środki napędu w różnego rodzaju maszynach i urządzeniach przemysłowych
PRZEKŁADNIE ŁAŃCUCHOWE Przekładnie łańcuchowe znajdują zastosowanie ( szczególnie przy dużych odległościach osi ) do przenoszenia mocy, jako środki napędu w różnego rodzaju maszynach i urządzeniach przemysłowych
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 03/08. BOGDAN BRANOWSKI, Poznań, PL JAROSŁAW FEDORCZUK, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
OBLICZANIE KÓŁK ZĘBATYCH
 OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
STEROWANE ROBOTY. #7328 Instrukcja składania. części. modeli do składania i eksperymentów
 STEROWANE ROBOTY 8 części 0 modeli do składania i eksperymentów #78 Instrukcja składania Spis treści Spis części... Tajemnice pilota zdalnego sterowania... Odbiornik z uchwytem do baterii i motoreduktor...
STEROWANE ROBOTY 8 części 0 modeli do składania i eksperymentów #78 Instrukcja składania Spis treści Spis części... Tajemnice pilota zdalnego sterowania... Odbiornik z uchwytem do baterii i motoreduktor...
Walce do zwijania blach DOKUMENTACJA TECHNICZNO RUCHOWA
 Walce do zwijania blach DOKUMENTACJA TECHNICZNO Stron 10 Strona 1 Spis treści I. Rysunek poglądowy maszyny 2 II. Podstawowe dane techniczne 4 III. Konstrukcja i przeznaczenie 4 IV. Układ napędowy 8 V.
Walce do zwijania blach DOKUMENTACJA TECHNICZNO Stron 10 Strona 1 Spis treści I. Rysunek poglądowy maszyny 2 II. Podstawowe dane techniczne 4 III. Konstrukcja i przeznaczenie 4 IV. Układ napędowy 8 V.
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie. Ćwiczenie 3 Dobór mikrosilnika prądu stałego do układu pozycjonującego
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
WYMAGANIA EDUKACYJNE I KYTERIA OCENIANIA E3. KOMPUTEROWE PROJEKTOWANIE CZĘŚCI MASZYN
 WYMAGANIA EDUKACYJNE I KYTERIA OCENIANIA zawód: Technik mechatronik E3. KOMUTEROWE ROJEKTOWANIE CZĘŚCI MASZYN E3.01. rojektowanie połączeń rozłącznych i nierozłącznych E3.02. rojektowanie podzespołów osi
WYMAGANIA EDUKACYJNE I KYTERIA OCENIANIA zawód: Technik mechatronik E3. KOMUTEROWE ROJEKTOWANIE CZĘŚCI MASZYN E3.01. rojektowanie połączeń rozłącznych i nierozłącznych E3.02. rojektowanie podzespołów osi
Projekt małego teleskopu SST DC i prowadzone prace konstrukcyjne
 Projekt małego teleskopu SST DC i prowadzone prace konstrukcyjne J. Michałowski, M. Dyrda, W.Kochański, J. Niemiec, K.Skowron, M. Stodulski, P. Ziółkowski, P. Żychowski Instytut Fizyki Jądrowej PAN im.
Projekt małego teleskopu SST DC i prowadzone prace konstrukcyjne J. Michałowski, M. Dyrda, W.Kochański, J. Niemiec, K.Skowron, M. Stodulski, P. Ziółkowski, P. Żychowski Instytut Fizyki Jądrowej PAN im.
Stanowisko do diagnostyki wielofunkcyjnego zestawu napędowego operującego w zróżnicowanych warunkach pracy
 Stanowisko do diagnostyki wielofunkcyjnego zestawu napędowego operującego w zróżnicowanych warunkach pracy 1. Opis stanowiska laboratoryjnego. Budowę stanowiska laboratoryjnego przedstawiono na poniższym
Stanowisko do diagnostyki wielofunkcyjnego zestawu napędowego operującego w zróżnicowanych warunkach pracy 1. Opis stanowiska laboratoryjnego. Budowę stanowiska laboratoryjnego przedstawiono na poniższym
ROBOTY ZDALNIE STAROWANE
 IMPORTER: educarium spółka z o.o. ul. Grunwaldzka 207, 85-451 Bydgoszcz tel. (52) 32 47 800, faks (52) 32 10 251, 32 47 880 e-mail: info@educarium.pl portal edukacyjny: www.educarium.pl sklep internetowy:
IMPORTER: educarium spółka z o.o. ul. Grunwaldzka 207, 85-451 Bydgoszcz tel. (52) 32 47 800, faks (52) 32 10 251, 32 47 880 e-mail: info@educarium.pl portal edukacyjny: www.educarium.pl sklep internetowy:
Przekładnie zębate. Klasyfikacja przekładni zębatych. 1. Ze względu na miejsce zazębienia. 2. Ze względu na ruchomość osi
 Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229123 (13) B1 (21) Numer zgłoszenia: 411048 (51) Int.Cl. F16H 3/06 (2006.01) F16H 1/16 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229123 (13) B1 (21) Numer zgłoszenia: 411048 (51) Int.Cl. F16H 3/06 (2006.01) F16H 1/16 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Politechnika Śląska. Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki. Praca dyplomowa inżynierska. Wydział Mechaniczny Technologiczny
 Politechnika Śląska Wydział Mechaniczny Technologiczny Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki Praca dyplomowa inżynierska Temat pracy Symulacja komputerowa działania hamulca tarczowego
Politechnika Śląska Wydział Mechaniczny Technologiczny Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki Praca dyplomowa inżynierska Temat pracy Symulacja komputerowa działania hamulca tarczowego
(12) OPIS PATENTOWY. (54)Uniwersalny moduł obrotowo-podziałowy
 OPIS PATENTOWY. (54)Uniwersalny moduł obrotowo-podziałowy") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160463 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 283098 (22) Data zgłoszenia: 28.12.1989 B23Q (51)IntCl5: 16/06 (54)Uniwersalny
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160463 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 283098 (22) Data zgłoszenia: 28.12.1989 B23Q (51)IntCl5: 16/06 (54)Uniwersalny
PÓŁKOLONIE dla Dzieci w wieku 8-12 LAT MŁODY INŻYNIER
 PÓŁKOLONIE dla Dzieci w wieku 8-12 LAT MŁODY INŻYNIER IDEA ZAJĘĆ Podczas zajęd dzieci w wieku 8 12 lat budują i programują roboty. Już na etapie podstawówki nasi podopieczni widzą naukę w kategoriach efektów
PÓŁKOLONIE dla Dzieci w wieku 8-12 LAT MŁODY INŻYNIER IDEA ZAJĘĆ Podczas zajęd dzieci w wieku 8 12 lat budują i programują roboty. Już na etapie podstawówki nasi podopieczni widzą naukę w kategoriach efektów
CZYM RÓŻNI SIĘ ZESTAW LEGO MINDSTORMS EV3 W WERSJI DOMOWEJ (31313) OD ZESTAWU W WERSJI EDUKACYJNEJ (45544)?
 OD ZESTAWU W WERSJI EDUKACYJNEJ (45544)?") NeoRobots Sp. z o.o. ul. Agrestowa 14 62-070 Dą browa CZYM RÓŻNI SIĘ ZESTAW LEGO MINDSTORMS EV3 W WERSJI DOMOWEJ (31313) OD ZESTAWU W WERSJI EDUKACYJNEJ (45544)? Jakie są różnice wizualne zestawów Lego
NeoRobots Sp. z o.o. ul. Agrestowa 14 62-070 Dą browa CZYM RÓŻNI SIĘ ZESTAW LEGO MINDSTORMS EV3 W WERSJI DOMOWEJ (31313) OD ZESTAWU W WERSJI EDUKACYJNEJ (45544)? Jakie są różnice wizualne zestawów Lego
Wakacje z robotami RoboCAMP Opis zajęć dla dzieci w wieku 9-14 lat
 Wakacje dla dzieci 2012 Łódź 30 lipca 3 sierpnia 6 sierpnia - 10 sierpnia Wakacje z robotami RoboCAMP Opis zajęć dla dzieci w wieku 9-14 lat Uniwersytet Łódzki i RoboNET - Wspólnie zmieniamy edukację w
Wakacje dla dzieci 2012 Łódź 30 lipca 3 sierpnia 6 sierpnia - 10 sierpnia Wakacje z robotami RoboCAMP Opis zajęć dla dzieci w wieku 9-14 lat Uniwersytet Łódzki i RoboNET - Wspólnie zmieniamy edukację w
Koła pasowe mogą być mocowane bezpośrednio na wałach silników lub maszyn, lub z zastosowaniem specjalnych podpór
 PRZEKŁADNIA PASOWA Model fenomologiczny przekładni pasowej Rys.1. Własności przekładni pasowych Podstawowymi zaletami przekładni pasowej są: - łagodzenie gwałtownych zmian obciążenia i tłumienie drgań
PRZEKŁADNIA PASOWA Model fenomologiczny przekładni pasowej Rys.1. Własności przekładni pasowych Podstawowymi zaletami przekładni pasowej są: - łagodzenie gwałtownych zmian obciążenia i tłumienie drgań
SZKOŁA POLICEALNA dla dorosłych
 SZKOŁA POLICEALNA dla dorosłych Kierunek kształcenia w zawodzie: www. samochodowka.edu.pl Przedmiot: dr inż. Janusz Walkowiak PLAN WYKŁADU 1. Wały napędowe 1.1. Budowa i zadania wałów napędowych 1.2.
SZKOŁA POLICEALNA dla dorosłych Kierunek kształcenia w zawodzie: www. samochodowka.edu.pl Przedmiot: dr inż. Janusz Walkowiak PLAN WYKŁADU 1. Wały napędowe 1.1. Budowa i zadania wałów napędowych 1.2.
OSTRZAŁKA DO PIŁ TARCZOWYCH
 OSTRZAŁKA DO PIŁ TARCZOWYCH JMY8-70 INSTRUKCJA OBSŁUGI 1 Spis treści I. INFORMACJE WSTĘPNE... 2 II. DANE TECHNICZNE... 3 III. OBSŁUGA... 3 IV. ZASADY BEZPIECZEŃSTWA... 4 V. SCHEMAT... 4 I. INFORMACJE WSTĘPNE
OSTRZAŁKA DO PIŁ TARCZOWYCH JMY8-70 INSTRUKCJA OBSŁUGI 1 Spis treści I. INFORMACJE WSTĘPNE... 2 II. DANE TECHNICZNE... 3 III. OBSŁUGA... 3 IV. ZASADY BEZPIECZEŃSTWA... 4 V. SCHEMAT... 4 I. INFORMACJE WSTĘPNE
Egzamin 1 Strona 1. Egzamin - AR egz Zad 1. Rozwiązanie: Zad. 2. Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same
 Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
NIEOFICJALNY PRZEWODNIK KONSTRUKTORA LEGO TECHNIC
 Paweł Sariel Kmieć NIEOFICJALNY PRZEWODNIK KONSTRUKTORA LEGO TECHNIC Przekład: Maria Chaniewska APN Promise, Warszawa 2013 szczegółowy spis treści słowo wstępne... xv przedmowa... xvii podziękowania...
Paweł Sariel Kmieć NIEOFICJALNY PRZEWODNIK KONSTRUKTORA LEGO TECHNIC Przekład: Maria Chaniewska APN Promise, Warszawa 2013 szczegółowy spis treści słowo wstępne... xv przedmowa... xvii podziękowania...
12 RUCH OBROTOWY BRYŁY SZTYWNEJ I. a=εr. 2 t. Włodzimierz Wolczyński. Przyspieszenie kątowe. ε przyspieszenie kątowe [ ω prędkość kątowa
 Włodzimierz Wolczyński Przyspieszenie kątowe 1 RUCH OROTOWY RYŁY SZTYWNEJ I = = ε przyspieszenie kątowe [ ] ω prędkość kątowa = = T okres, = - częstotliwość s=αr v=ωr a=εr droga = kąt x promień prędkość
Włodzimierz Wolczyński Przyspieszenie kątowe 1 RUCH OROTOWY RYŁY SZTYWNEJ I = = ε przyspieszenie kątowe [ ] ω prędkość kątowa = = T okres, = - częstotliwość s=αr v=ωr a=εr droga = kąt x promień prędkość
SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE
 SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE 1 Zakres momentów przenoszonych przez przekładnie przemysłowe w zestawieniu do motoreduktorów
SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE 1 Zakres momentów przenoszonych przez przekładnie przemysłowe w zestawieniu do motoreduktorów
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
ANALIZA KINEMATYCZNA ZŁOŻONYCH KONSTRUKCYJNIE PRZEKŁADNI OBIEGOWYCH DO ELEKTROMECHANICZNYCH ZESPOŁÓW NAPĘDOWYCH Z ZASTOSOWANIEM WZORÓW WILLISA
 Maszyny Elektryczne - Zeszyty Problemowe Nr 1/2019 (121) 37 Szczepan Opach Instytut Napędów i Maszyn Elektrycznych KOMEL, Katowice ANALIZA KINEMATYCZNA ZŁOŻONYCH KONSTRUKCYJNIE PRZEKŁADNI OBIEGOWYCH DO
Maszyny Elektryczne - Zeszyty Problemowe Nr 1/2019 (121) 37 Szczepan Opach Instytut Napędów i Maszyn Elektrycznych KOMEL, Katowice ANALIZA KINEMATYCZNA ZŁOŻONYCH KONSTRUKCYJNIE PRZEKŁADNI OBIEGOWYCH DO
Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, Spis treści
 Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, 2016 Spis treści Wykaz ważniejszych oznaczeń 11 Od autora 13 Wstęp 15 Rozdział 1. Wprowadzenie 17 1.1. Pojęcia ogólne. Klasyfikacja pojazdów
Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, 2016 Spis treści Wykaz ważniejszych oznaczeń 11 Od autora 13 Wstęp 15 Rozdział 1. Wprowadzenie 17 1.1. Pojęcia ogólne. Klasyfikacja pojazdów