Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
|
|
|
- Juliusz Karpiński
- 9 lat temu
- Przeglądów:
Transkrypt
1 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska

2 Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie. Praca zbiorowa. Handbook on Robotics. oraz materiałów producentów i dystrybutorów urządzeń. Niniejszy plik stanowi pomoc do wykładu Roboty manipulacyjne i mobilne.

3 Przykłady zastosowań robotów przemysłowych 1. Spawanie 2. Montaż 3. Malowanie 4. Transport 5. Obróbka 6. Wspomaganie człowieka

4 Spawanie Cechy współczesnych robotów Dokładność pozycjonowania ok. 1.0 mm, powtarzalność ok. 0.1 mm Prędkość końcówki efektora do 8 m/s Dopuszczalny ładunek kg 6 lub więcej stopni swobody zapewniających kontrolę nad położeniem i orientacją efektora Planowanie ruchu robota na podstawie danych z oprogramowania CAD/CAM Synchronizacja z zewnętrznymi urządzeniami przez układy we/wy i komunikacja sieciowa z nadrzędnymi systemami sterującymi

5 Spawanie Specyficzne wymagania Synchronizacja z robotami transportującymi elementy Sensory wyznaczające kierunek spawu badające jego jakość kontrolujące przebieg procesu spawania wielowarstwowego

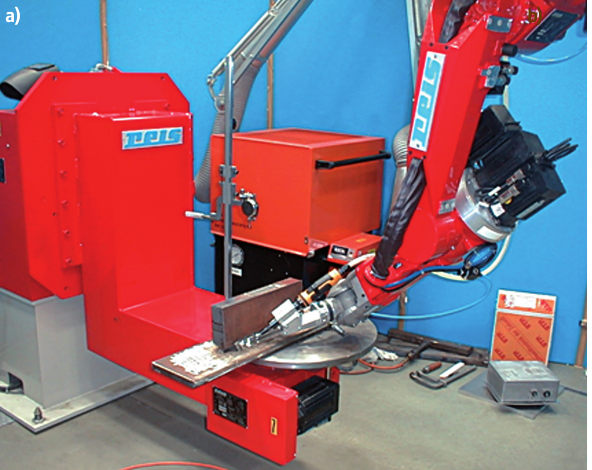
6 Spawanie

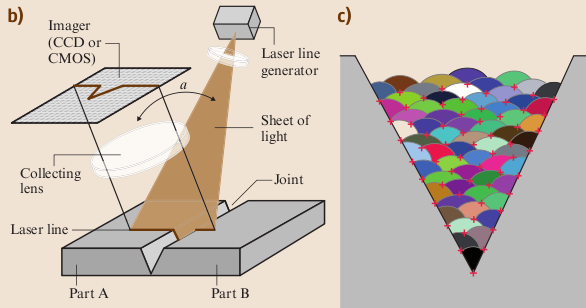
7 Spawanie

8 Montaż Specyficzne wymagania Manipulacja elementami o masie kg Dokładność pozycjonowania 0.5 mm Niezawodność w pracy ciągłej (typowy MTBF: h) Prędkość i przyspieszenie, które wyznaczają wydajność linii produkcyjnej Programowanie off-line (RSS realistic robot simulator)

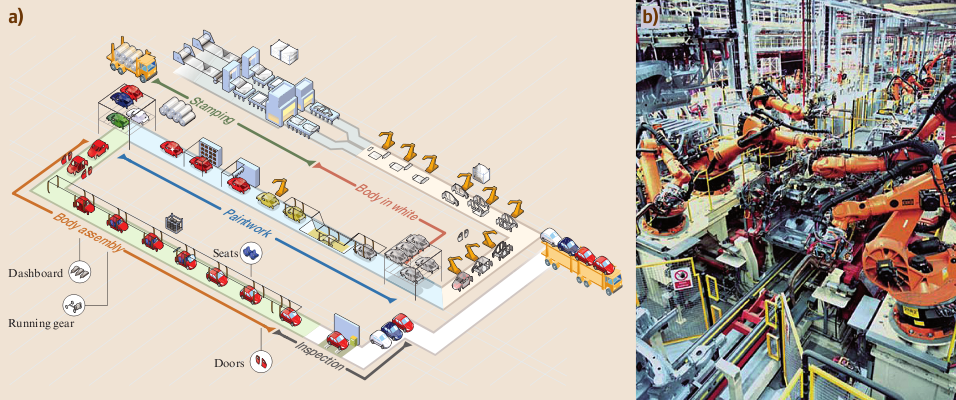
9 Montaż

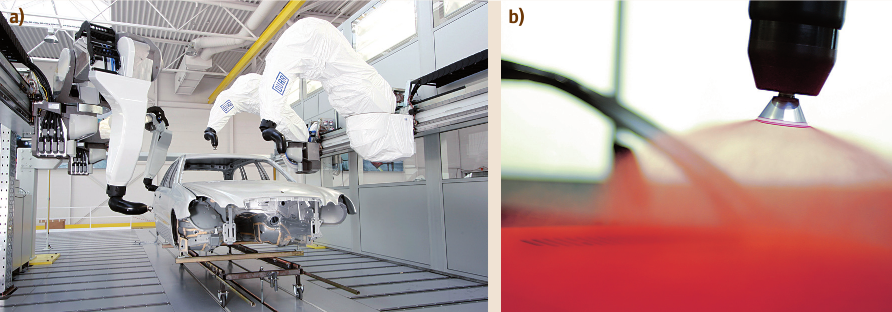
10 Malowanie

11 Przenoszenie elementów Specyficzne wymagania Sensory rozpoznające elementy Adaptacja ruchu robota do elementów w różnych pozycjach i orientacjach Planowanie chwytu


12 Przenoszenie elementów

13 Obróbka W porównaniu z obrabiarkami istotnie mniejsza sztywność (20 50 razy), ale większe możliwości ruchowe. Wymagane projektowanie obróbki wymagające użycia mniejszych sił. Planowanie ruchu robota na podstawie modeli z programów CAD.

14 Obróbka

15 Współpraca z człowiekiem Wspomaganie siły lub dokładności Np. półautomatyczny montaż Szczególnie istotne zagadnienia bezpieczeństwa 1 Zachowanie bezpiecznej prędkości (do 250 mm/s) Monitorowanie pozycji robota 2 Utrzymywanie bezpiecznej odległości od człowieka 2 Brak systemów sensorycznych dopuszczalny tylko dla małych robotów (do 80 W, maksymalna siła uderzenia 150 N) 1 ISO : przynajmniej kategorii 3 wg. ISO 13849
 1")

16 Współpraca z człowiekiem

17 Typowe układy kinematyczne robotów bramowe SCARA ramię o 6 st. swobody równoległe

18 bramowe


19 Robot przestrzenią zadaniową o wymiarze poniżej 6


20 Ramię o 6 st. swobody

21 Robot równoległy
22 Robot mobilny (AGV)
23 Elementy sterownika CNC 1. Magistrala 2. CPU 3. Pamięć (RAM,EPROM,zewnętrzna) 4. Moduł kontroli 5. Interfejs komunikacji z innymi komputerami/sterownikami 6. Procesor PLC 7. Iterfejs panelu programatora 8. Wejścia i wyjścia dwustanowe anawe cyfrowe 9. Sterowniki serwonapędów 10. Interpolator 11. Sterowniki napędów krokowych
24 Układy napędowe pneumatyczne hydrauliczne elektryczne prądu stałego (silniki komutatorowe lub bezkomutatorowe) prądu przemiennego (synchroniczne lub asynchroniczne) krokowe liniowe
25 Silnik liniowy
26 Moduł silnika liniowego
27 Kryteria i właściwości przekładni Dokładność pozycjonowania luz kątowy sztywność równomierność biegu Prędkość sprawność moment bezwładności Stabilność odporność na przeciążenia żywotność Inne: koszt utrzymania, zwartość budowy, dowolność położenia etc.
28 Rodzaje przekładni Zamieniające ruch obrotowy na postępowy (śrubowa, zębatkowa, pasowa zębata, łańcuchowa) Przekazujące ruch obrotowy mechanizmy dźwigniowe zębate (walcowa, ślimakowa, planetarna, falowa, cykloidalna, precesyjna) cięgnowe cierne (linowa, pasowa klinowa) kształtowe (łańcuchowa, pasowa zębata)
29 Przekładnie (kiść Irb-6)
30 Przekładnia śrubowa toczna
31 Przekładnia planetarna
32 Przekładnia falowa
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Badanie powtarzalności pozycjonowania robota IRp-6
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie powtarzalności pozycjonowania robota IRp-6 opracował: dr inż. Paweł Cegielski Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Automatyzacja
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie powtarzalności pozycjonowania robota IRp-6 opracował: dr inż. Paweł Cegielski Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Automatyzacja
Laboratorium z Napęd Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
WObit dziś. Tworzenie może być naszą wspólną pasją. str. Karta katalogowa - TR v
 Robot Tower TR1200 WObit dziś Ponad dwadzieścia lat istnienia firmy WObit w istotny sposób wpłynęło na rozwój automatyki na polskim rynku. Firma została założona przez Witolda Ober na początku lat dziewięćdziesiątych.
Robot Tower TR1200 WObit dziś Ponad dwadzieścia lat istnienia firmy WObit w istotny sposób wpłynęło na rozwój automatyki na polskim rynku. Firma została założona przez Witolda Ober na początku lat dziewięćdziesiątych.
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Wyznaczenie równowagi w mechanizmie. Przykład 6
 Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
WObit dziś. Tworzenie może być naszą wspólną pasją. str. Karta katalogowa - TR v
 Robot Tower TR300 WObit dziś Ponad dwadzieścia lat istnienia firmy WObit w istotny sposób wpłynęło na rozwój automatyki na polskim rynku. Firma została założona przez Witolda Obera na początku lat dziewięćdziesiątych.
Robot Tower TR300 WObit dziś Ponad dwadzieścia lat istnienia firmy WObit w istotny sposób wpłynęło na rozwój automatyki na polskim rynku. Firma została założona przez Witolda Obera na początku lat dziewięćdziesiątych.
Obrabiarki sterowane numerycznie / Jerzy Honczarenko. Wyd. 1-1 dodr. (PWN). Warszawa, Spis treści WSTĘP 11
. Warszawa, Spis treści WSTĘP 11") Obrabiarki sterowane numerycznie / Jerzy Honczarenko. Wyd. 1-1 dodr. (PWN). Warszawa, 2017 Spis treści WSTĘP 11 CZĘŚĆ I. WIADOMOŚCI PODSTAWOWE 1. OBRABIARKI W PROCESIE WYTWARZANIA 17 1.1. Wprowadzenie
Obrabiarki sterowane numerycznie / Jerzy Honczarenko. Wyd. 1-1 dodr. (PWN). Warszawa, 2017 Spis treści WSTĘP 11 CZĘŚĆ I. WIADOMOŚCI PODSTAWOWE 1. OBRABIARKI W PROCESIE WYTWARZANIA 17 1.1. Wprowadzenie
IRB PODSUMOWANIE:
 IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Instrukcja z przedmiotu Napęd robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F
 ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Kiść robota. Rys. 1. Miejsce zabudowy chwytaka w robocie IRb-6.
 Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. kiści. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia
Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. kiści. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
1 Zasady bezpieczeństwa
 1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
PRZEKŁADNIE ZĘBATE. Przekł. o osiach stałych. Przekładnie obiegowe. Planetarne: W=1 Różnicowe i sumujące: W>1
 PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
Roboty przemysłowe. Cz. II
 Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Rok akademicki: 2015/2016 Kod: RME s Punkty ECTS: 12. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Teoria maszyn i mechanizmów Kod przedmiotu
 Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Rok akademicki: 2013/2014 Kod: RAR s Punkty ECTS: 5. Poziom studiów: Studia I stopnia Forma i tryb studiów: -
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Laboratorium Napędu Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
KATALOG SPRZEDAŻY 1. LASER IPG 6KW NUMER SERYJNY
 KATALOG SPRZEDAŻY 1. LASER IPG 6KW MODEL LASERU YLS-6000-S4 NUMER SERYJNY 13103250 1 ZEWNĘTRZNE WYMIARY URZĄDZENIA 2 CHARAKTERYSTYKA OPTYCZNA OGÓLNA CHARAKTERYSTYKA WARUNKI 3 DODATKOWE INFORMACJE 4 2.
KATALOG SPRZEDAŻY 1. LASER IPG 6KW MODEL LASERU YLS-6000-S4 NUMER SERYJNY 13103250 1 ZEWNĘTRZNE WYMIARY URZĄDZENIA 2 CHARAKTERYSTYKA OPTYCZNA OGÓLNA CHARAKTERYSTYKA WARUNKI 3 DODATKOWE INFORMACJE 4 2.
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
PROJEKTOWANIE MECHATRONICZNE UKŁADY NAPĘDOWE OBRABIAREK
 PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl Wśród układów napędowych obrabiarek można rozróżnić napędy główne
PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl Wśród układów napędowych obrabiarek można rozróżnić napędy główne
Rozróżnia proste przypadki obciążeń elementów konstrukcyjnych
 roces projektowania części maszyn Wpisany przez iotr ustelny Moduł: roces projektowania części maszyn Typ szkoły: Technikum Jednostka modułowa C rojektowanie połączeń rozłącznych i nierozłącznych Zna ogólne
roces projektowania części maszyn Wpisany przez iotr ustelny Moduł: roces projektowania części maszyn Typ szkoły: Technikum Jednostka modułowa C rojektowanie połączeń rozłącznych i nierozłącznych Zna ogólne
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
KATALOG SPRZEDAŻY 1. LASER IPG 6KW NUMER SERYJNY
 KATALOG SPRZEDAŻY 1. LASER IPG 6KW MODEL LASERU YLS-6000-S4 NUMER SERYJNY 13103250 1 ZEWNĘTRZNE WYMIARY URZĄDZENIA 2 CHARAKTERYSTYKA OPTYCZNA OGÓLNA CHARAKTERYSTYKA WARUNKI 3 DODATKOWE INFORMACJE 4 2.
KATALOG SPRZEDAŻY 1. LASER IPG 6KW MODEL LASERU YLS-6000-S4 NUMER SERYJNY 13103250 1 ZEWNĘTRZNE WYMIARY URZĄDZENIA 2 CHARAKTERYSTYKA OPTYCZNA OGÓLNA CHARAKTERYSTYKA WARUNKI 3 DODATKOWE INFORMACJE 4 2.
1) Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3.
 Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3.") PLC 1) Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3. 1.Ladder Diagram (LD) język graficzny schematów drabinkowych 2. Function Block Diagram (FBD) jezyk bloków
PLC 1) Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3. 1.Ladder Diagram (LD) język graficzny schematów drabinkowych 2. Function Block Diagram (FBD) jezyk bloków
INSTRUKCJA DO ĆWICZENIA NR 2. Analiza kinematyczna napędu z przekładniami
 INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
OZNACZENIA NA SCHEMATACH RYSUNKOWYCH. Opracował: Robert Urbanik
 OZNACZENIA NA SCHEMATACH RYSUNKOWYCH Opracował: Robert Urbanik Oznaczenia na schematach kinematycznych- symbole ruchu Tor ruchu prostoliniowego Chwilowe zatrzymanie w położeniu pośrednim Koniec ruchu prostoliniowego
OZNACZENIA NA SCHEMATACH RYSUNKOWYCH Opracował: Robert Urbanik Oznaczenia na schematach kinematycznych- symbole ruchu Tor ruchu prostoliniowego Chwilowe zatrzymanie w położeniu pośrednim Koniec ruchu prostoliniowego
W TECHNOLOGII DRUKU 3D
 Mateusz MARKIEFKA 1 Opiekun naukowy: Jacek RYSIŃSKI 2 PROJEKT ROBOTA ANTROPOMORFICZNEGO WYKONANEGO W TECHNOLOGII DRUKU 3D Streszczenie: W pracy przedstawiono projekt oraz założenia konstrukcyjne robota
Mateusz MARKIEFKA 1 Opiekun naukowy: Jacek RYSIŃSKI 2 PROJEKT ROBOTA ANTROPOMORFICZNEGO WYKONANEGO W TECHNOLOGII DRUKU 3D Streszczenie: W pracy przedstawiono projekt oraz założenia konstrukcyjne robota
WYDZIAŁ ZARZĄDZANIA PODSTAWY TECHNIKI I TECHNOLOGII
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ZARZĄDZANIA KATEDRA ZARZĄDZANIA PRODUKCJĄ Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY TECHNIKI I TECHNOLOGII Kod przedmiotu: ISO1123, I NO1123 Numer ćwiczenia:
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ZARZĄDZANIA KATEDRA ZARZĄDZANIA PRODUKCJĄ Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY TECHNIKI I TECHNOLOGII Kod przedmiotu: ISO1123, I NO1123 Numer ćwiczenia:
T13 Modelowanie zautomatyzowanych procesów wytwórczych, programowanie maszyn CNC
 T13 Modelowanie zautomatyzowanych procesów wytwórczych, programowanie maszyn CNC 1. Wstęp Wg normy ISO ITR 8373, robot przemysłowy jest automatycznie sterowaną, programowalną, wielozadaniową maszyną manipulacyjną
T13 Modelowanie zautomatyzowanych procesów wytwórczych, programowanie maszyn CNC 1. Wstęp Wg normy ISO ITR 8373, robot przemysłowy jest automatycznie sterowaną, programowalną, wielozadaniową maszyną manipulacyjną
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 19/10
 PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
(12) OPIS PATENTOWY. (54)Uniwersalny moduł obrotowo-podziałowy
 OPIS PATENTOWY. (54)Uniwersalny moduł obrotowo-podziałowy") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160463 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 283098 (22) Data zgłoszenia: 28.12.1989 B23Q (51)IntCl5: 16/06 (54)Uniwersalny
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160463 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 283098 (22) Data zgłoszenia: 28.12.1989 B23Q (51)IntCl5: 16/06 (54)Uniwersalny
Podstawy robotyki wykład I. Wprowadzenie Robot i jego historia
 Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
MODEL MANIPULATORA O DWÓCH STOPNIACH SWOBODY
 Adam Labuda Janusz Pomirski Andrzej Rak Akademia Morska w Gdyni MODEL MANIPULATORA O DWÓCH STOPNIACH SWOBODY W artykule opisano konstrukcję modelu manipulatora o dwóch przegubach obrotowych. Obie osie
Adam Labuda Janusz Pomirski Andrzej Rak Akademia Morska w Gdyni MODEL MANIPULATORA O DWÓCH STOPNIACH SWOBODY W artykule opisano konstrukcję modelu manipulatora o dwóch przegubach obrotowych. Obie osie
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Państwowa Wyższa Szkoła Zawodowa w Głogowie Instytut Politechniczny
 Państwowa Wyższa Szkoła Zawodowa w Głogowie Instytut Politechniczny Wykaz zagadnień - egzamin dyplomowy inżynierski 2013 r. Kierunek: Automatyka i Robotyka Specjalność: Robotyka i mechatronika I. Matematyka
Państwowa Wyższa Szkoła Zawodowa w Głogowie Instytut Politechniczny Wykaz zagadnień - egzamin dyplomowy inżynierski 2013 r. Kierunek: Automatyka i Robotyka Specjalność: Robotyka i mechatronika I. Matematyka
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
OSIE ELEKTRYCZNE SERII SHAK GANTRY
 OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
Roboty manipulacyjne (stacjonarne)
") Roboty manipulacyjne (stacjonarne) Podstawowe układy i zespoły Roboty przemysłowe składa się z następujących trzech podstawowych układów: zasilania, sterowania i ruchu. Układ zasilania Układ zasilania
Roboty manipulacyjne (stacjonarne) Podstawowe układy i zespoły Roboty przemysłowe składa się z następujących trzech podstawowych układów: zasilania, sterowania i ruchu. Układ zasilania Układ zasilania
SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE
 SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE 1 Zakres momentów przenoszonych przez przekładnie przemysłowe w zestawieniu do motoreduktorów
SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE 1 Zakres momentów przenoszonych przez przekładnie przemysłowe w zestawieniu do motoreduktorów
1.0. Systemowa interpretacja różnych form pracy ludzkiej. stan przedmiotu sprzężenie zwrotne współrzędnych stanu
 1.0. Systemowa interpretacja różnych form pracy ludzkiej. cechy: *stan przedmiotu zmienne charakteryzujące przedmiot *sprzężenie zwrotne informacja z wyjścia na wejście *współrzędnych stanu wektor stanu
1.0. Systemowa interpretacja różnych form pracy ludzkiej. cechy: *stan przedmiotu zmienne charakteryzujące przedmiot *sprzężenie zwrotne informacja z wyjścia na wejście *współrzędnych stanu wektor stanu
Specyfikacja techniczna obrabiarki. wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40
 Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Spis treści. Przedmowa 11
 Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Research & Development. Zespół R&D
 Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Siłownik liniowy. Zastosowanie: automatyka przemysłowa, maszyny i urządzenia przemysłowe
 Zastosowanie: automatyka przemysłowa, maszyny i urządzenia przemysłowe www.linearmech.it Zalety: przeznaczony do pracy w ciężkich warunkach mechanizm śrubowo toczny o dużej sprawności szybki wysuw do 125mm/s
Zastosowanie: automatyka przemysłowa, maszyny i urządzenia przemysłowe www.linearmech.it Zalety: przeznaczony do pracy w ciężkich warunkach mechanizm śrubowo toczny o dużej sprawności szybki wysuw do 125mm/s
Zautomatyzowane systemy produkcyjne Kod przedmiotu
 Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Dobór sprzęgieł hydrokinetycznych 179 Bibliografia 183
 Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Schematy kinematyczne. Technologia napraw - ćwiczenia 133
 Schematy kinematyczne Technologia napraw - ćwiczenia 133 Plan zajęć Wprowadzenie Schemat - definicja Rodzaje schematów Schemat kinematyczny zasadniczy Schemat kinematyczny vs. normy Zasady wykonywania
Schematy kinematyczne Technologia napraw - ćwiczenia 133 Plan zajęć Wprowadzenie Schemat - definicja Rodzaje schematów Schemat kinematyczny zasadniczy Schemat kinematyczny vs. normy Zasady wykonywania
OSIE ELEKTRYCZNE SERII SVAK
 OSIE ELEKTRYCZNE SERII SVAK 1 OSIE ELEKTRYCZNE SERII SVAK Jednostka liniowa serii SVAK to napęd paskowy ze stałym wózkiem i ruchomym profilem. Uzupełnia ona gamę osi elektrycznych Metal Work ułatwiając
OSIE ELEKTRYCZNE SERII SVAK 1 OSIE ELEKTRYCZNE SERII SVAK Jednostka liniowa serii SVAK to napęd paskowy ze stałym wózkiem i ruchomym profilem. Uzupełnia ona gamę osi elektrycznych Metal Work ułatwiając
Laboratorium Maszyny CNC. Nr 3
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady
 Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Mechanizacja, Automatyzacja, Robotyzacja
Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Mechanizacja, Automatyzacja, Robotyzacja
Kątowe AC. Współosiowe AC. Kątowe DC. Współosiowe DC. Silniki specjalizowane. Tanie małogabarytowe. Przetwornice AC i sterowniki napędowe
 Szeroka oferta i doświadczenie w doborze napędów zapewnia, iż jesteśmy zdolni zaproponować kilka rozwiązań do jednej aplikacji. Nasza oferta obejmuje szeroką gamę silników oraz przekładni. Współosiowe
Szeroka oferta i doświadczenie w doborze napędów zapewnia, iż jesteśmy zdolni zaproponować kilka rozwiązań do jednej aplikacji. Nasza oferta obejmuje szeroką gamę silników oraz przekładni. Współosiowe
WIERTARKO-FREZARKI CNC modele TRD i GRD SERIA TRD SERIA GRD. GWINCIARKI DO GWINTÓW WEWNĘTRZNYCH pneumatyczne. elektryczne.
 www.pax-maszyny.pl WIERTARKO-FREZARKI CNC modele TRD i GRD CMA TRD Wiertarko-frezarka CNC Obszar roboczy osi X,Y: 3000x600 4500x600 6000x600 7500x600 9000x600 12000x600 SERIA TRD CMA GRD Bramowa wiertarkofrezarka
www.pax-maszyny.pl WIERTARKO-FREZARKI CNC modele TRD i GRD CMA TRD Wiertarko-frezarka CNC Obszar roboczy osi X,Y: 3000x600 4500x600 6000x600 7500x600 9000x600 12000x600 SERIA TRD CMA GRD Bramowa wiertarkofrezarka
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
4. Sylwetka absolwenta
 1. Technik mechatronik to nowoczesny i przyszłościowy zawód związany z projektowaniem, montowaniem, programowaniem oraz ekspoloatacją urządzeń i systemów mechatronicznych z wykorzystaniem technik komputerowych
1. Technik mechatronik to nowoczesny i przyszłościowy zawód związany z projektowaniem, montowaniem, programowaniem oraz ekspoloatacją urządzeń i systemów mechatronicznych z wykorzystaniem technik komputerowych
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Stanowisko napędów mechanicznych
 Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Roboty przemysłowe. Wprowadzenie
 Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Technik mechanik. Zespół Szkół Nr 2 w Sanoku
 Technik mechanik Zespół Szkół Nr 2 w Sanoku Technik mechanik Głównym celem pracy technika mechanika jest naprawa maszyn i urządzeń technicznych oraz uczestniczenie w procesie ich wytwarzania i użytkowania.
Technik mechanik Zespół Szkół Nr 2 w Sanoku Technik mechanik Głównym celem pracy technika mechanika jest naprawa maszyn i urządzeń technicznych oraz uczestniczenie w procesie ich wytwarzania i użytkowania.
Mechanika Robotów. Wojciech Lisowski. 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej
 Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
ROZWIĄZANIA WIZYJNE PRZEMYSŁOWE. Rozwiązania WIZYJNE. Capture the Power of Machine Vision POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD
 POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD PRZEMYSŁOWE ROZWIĄZANIA WIZYJNE Capture the Power of Machine Vision Sensors Cameras Frame Grabbers Processors Software Vision Solutions Informacje
POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD PRZEMYSŁOWE ROZWIĄZANIA WIZYJNE Capture the Power of Machine Vision Sensors Cameras Frame Grabbers Processors Software Vision Solutions Informacje
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia
 Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
WIERTARKO-FREZARKI CNC. model GRD. model TRD. model BRD. GWINCIARKI DO GWINTÓW WEWNĘTRZNYCH pneumatyczne. elektryczne.
 www.pax-maszyny.pl WIERTARKO-FREZARKI CNC CMA TRD Wiertarko-frezarka CNC Obszar roboczy osi X,Y: 3000x580 4500x580 6000x580 7500x580 9000x580 12000x580 model GRD model TRD CMA GRD Bramowa wiertarkofrezarka
www.pax-maszyny.pl WIERTARKO-FREZARKI CNC CMA TRD Wiertarko-frezarka CNC Obszar roboczy osi X,Y: 3000x580 4500x580 6000x580 7500x580 9000x580 12000x580 model GRD model TRD CMA GRD Bramowa wiertarkofrezarka
Wprowadzenie do robotyki
 Wprowadzenie do robotyki Robotyka to nauka i technologia projektowania, budowy i zastosowania sterowanych komputerowo urządzeń mechanicznych popularnie zwanych robotami. Robot urządzenie mechaniczne, które
Wprowadzenie do robotyki Robotyka to nauka i technologia projektowania, budowy i zastosowania sterowanych komputerowo urządzeń mechanicznych popularnie zwanych robotami. Robot urządzenie mechaniczne, które
Przenośniki Układy napędowe
 Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
STRONG GEAR! SLC NAPĘDY
 STRONG GEAR! SLC NAPĘDY PRZEKŁADNIE ŚLIMAKOWE TYP SWG 0-3 MOCNE, NIEZAWODNE, CICHOBIEŻNE TECHNOLOGIA Jakość Niemiecki produkt optymalna geometria uzębienia zapewnia wysoką cichobieżność przekładni Ułatwiona
STRONG GEAR! SLC NAPĘDY PRZEKŁADNIE ŚLIMAKOWE TYP SWG 0-3 MOCNE, NIEZAWODNE, CICHOBIEŻNE TECHNOLOGIA Jakość Niemiecki produkt optymalna geometria uzębienia zapewnia wysoką cichobieżność przekładni Ułatwiona
SYSTEMY PRZESUWU I PROWADZENIA LINIOWEGO. hepcomotion.com
 SYSTEMY PRZESUWU I PROWADZENIA LINIOWEGO hepcomotion.com PRT2 Precyzyjny system prowadnic łukowych 3 PRT2 Precyzyjny system prowadzący 4 HDRT system prowadnic łukowych do wysokich 7 System prowadnic łukowych
SYSTEMY PRZESUWU I PROWADZENIA LINIOWEGO hepcomotion.com PRT2 Precyzyjny system prowadnic łukowych 3 PRT2 Precyzyjny system prowadzący 4 HDRT system prowadnic łukowych do wysokich 7 System prowadnic łukowych
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie. Ćwiczenie 3 Dobór mikrosilnika prądu stałego do układu pozycjonującego
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
SERIA AT. Precyzyjne Przekładnie Kątowe
 SERIA AT Precyzyjne Przekładnie Kątowe Seria AT Charakterystyka Obudowa wykonana z jednego kawałka stali nierdzewnej zapewnia wysoką sztywność i odporność na korozję. Wielokrotna precyzyjna obróbka powierzchni
SERIA AT Precyzyjne Przekładnie Kątowe Seria AT Charakterystyka Obudowa wykonana z jednego kawałka stali nierdzewnej zapewnia wysoką sztywność i odporność na korozję. Wielokrotna precyzyjna obróbka powierzchni
(12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1
 OPIS PATENTOWY (19) PL (11) 174940 (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 305007 (22) Data zgłoszenia: 12.09.1994 (51) IntCl6: B25J 9/06 B25J
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 305007 (22) Data zgłoszenia: 12.09.1994 (51) IntCl6: B25J 9/06 B25J
ności od kinematyki zazębie
 Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
PROJEKTOWANIE MECHATRONICZNE UKŁADY PRZENIESIENIA NAPĘDU
 PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl UKŁADY PRZENIESIENIA NAPĘDU Przekładnie mechaniczne są zwykle
PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl UKŁADY PRZENIESIENIA NAPĘDU Przekładnie mechaniczne są zwykle
Podstawy Konstrukcji Maszyn. Wykład nr. 13 Przekładnie zębate
 Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
PL 203749 B1. Akademia Górniczo-Hutnicza im. Stanisława Staszica,Kraków,PL 17.10.2005 BUP 21/05. Bogdan Sapiński,Kraków,PL Sławomir Bydoń,Kraków,PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 203749 (13) B1 (21) Numer zgłoszenia: 367146 (51) Int.Cl. B25J 9/10 (2006.01) G05G 15/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 203749 (13) B1 (21) Numer zgłoszenia: 367146 (51) Int.Cl. B25J 9/10 (2006.01) G05G 15/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Obrotniki i. pozycjonery przeznaczone do spawania ręcznego i zautomatyzowanego.
 Obrotniki i pozycjonery przeznaczone do spawania ręcznego i zautomatyzowanego. Obrotniki i pozycjonery: pomagają utrzymać pomagają spawać Pozycjonery SAF zapewniają : Komfortowe użycie, Prawidłową postawę
Obrotniki i pozycjonery przeznaczone do spawania ręcznego i zautomatyzowanego. Obrotniki i pozycjonery: pomagają utrzymać pomagają spawać Pozycjonery SAF zapewniają : Komfortowe użycie, Prawidłową postawę
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym
 Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
ogólna charakterystyka
 PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym
 Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym Dr inż. Tomasz Buratowski Wydział inżynierii Mechanicznej i Robotyki Katedra Robotyki i Mechatroniki Bezpieczna Obsługa Robota Podstawowe
Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym Dr inż. Tomasz Buratowski Wydział inżynierii Mechanicznej i Robotyki Katedra Robotyki i Mechatroniki Bezpieczna Obsługa Robota Podstawowe
Rok akademicki: 2012/2013 Kod: EIB BR-s Punkty ECTS: 3. Kierunek: Inżynieria Biomedyczna Specjalność: Biomechanika i robotyka
 Nazwa modułu: Serwomechanizmy i zaawansowane systemy sterowania Rok akademicki: 2012/2013 Kod: EIB-2-103-BR-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
Nazwa modułu: Serwomechanizmy i zaawansowane systemy sterowania Rok akademicki: 2012/2013 Kod: EIB-2-103-BR-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
2.9. Kinematyka typowych struktur manipulatorów
 Politechnika Poznańska, Katedra Sterowania i Inżynierii Systemów str. 1 2.9. Kinematyka typowych struktur manipulatorów 2.9.1. Manipulator planarny 3DOF Notacja DH Rys. 28 Tablica 1 Parametry DH Nr ogniwa
Politechnika Poznańska, Katedra Sterowania i Inżynierii Systemów str. 1 2.9. Kinematyka typowych struktur manipulatorów 2.9.1. Manipulator planarny 3DOF Notacja DH Rys. 28 Tablica 1 Parametry DH Nr ogniwa