MECHANIKI. Laboratorium SAMOCHÓD WYŚCIGOWY. Konstrukcje od 1 do 30
|
|
|
- Łukasz Gajda
- 6 lat temu
- Przeglądów:
Transkrypt









 - Italy Tel.: +9 071 75811 www.clementoni.")
1 4 Laboratorium MECHANIKI SAMOCHÓD WYŚCIGOWY Konstrukcje od 1 do 0 1 -Montaż dwóch belek -Montaż belek z zastosowaniem dwóch gwoździ -Łączenie belek 4 -Montaż trzech belek 5 -Prostopadłe złożenie belek 6 -Złożenie belki z modułem kątowym 7 -Zbuduj kwadrat za pomocą belek 8 -Montaż czterech belek 9 -Zbuduj równoległościan 10 -Most z kilku elementów 11 -Koła zębate z drążkiem 1 -Zbuduj dźwignię 1.typu: obcęgi 1 -Zbuduj dźwignię.typu: dziadek do orzechów 14 -Zbuduj dźwignię. typu: szczypce 15 -Skonstruuj punkt podparcia dźwigni i obciążnik 16 -Skonstruuj i wypróbuj dźwignię o równowadze trwałej 17 -Skonstruuj i wypróbuj dźwignię o równowadze obojętnej 18 -Skonstruuj i wypróbuj dźwignię o równowadze chwiejnej 19 -Skonstruuj wagę 0 -Skonstruuj huśtawkę i wypróbuj 1 -Skonstruuj stanowisko do prób odwróconej rotacji -Skonstruuj model do eksperymentu z rotacją bezpośrednią -Skonstruuj model do eksperymentu z ruchem przemiennym 4 -Skonstruuj napęd pionowy 5 -Skonstruuj napęd pionowo-poziomy 6 -Śruba ślimakowa do podnoszenia 7 -Śruba ślimakowa jako przekładnia 8 -W celu obrotu w przeciwnym kierunku ku użyj modułu napędowego 9 -Zmontuj napęd z koszem satelitów 0 -Antyczna machina wojenna: taran PRODUCENT: Clementoni S.p.A. Zona Industriale Fontenoce s.n.c Recanati (MC) - Italy Tel.: Clementoni Polska Sp. z o.o. ul. Maszynowa, Gdańsk, Polska poland@clementoni.com Przeczytać i zachować do wglądu.





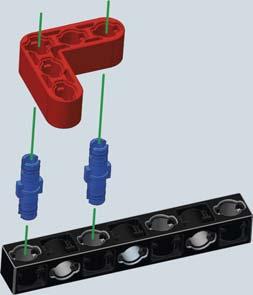
2 1 Montaz dwóch belek Złożone belki Montaz belek z zastosowaniem dwóch gwozdzi Jeśli użyjemy dwóch gwoździ, efekt będzie bardzo trwały! Złożone belki Laczenie belek X Złożone belki





3 4 Montaz trzech belek X Złożone belki 5 Prostopadle zlozenie belek Złożone belki 6 Zlozenie belki z modulem katowym Złożone belki





4 7 Zbuduj kwadrat za pomoca belek X4 X4 Gotowy model 8 Montaz czterech belek X4 X4 Gotowy model 1:1 4
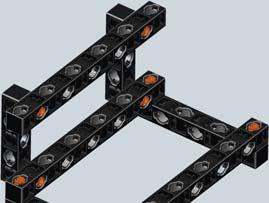







5 9 Zbuduj równolegloscian 1 X X8 Faza pośrednia X8 Gotowy model 5






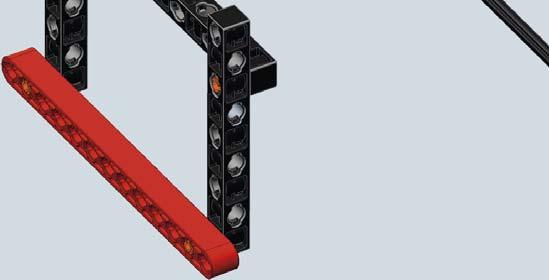
6 10 Most z kilku elementów X4 X4 Gotowy model 11 Kola zebate z drazkiem :1 6 4 Gotowy model Możecie go wypróbować jako bączka.

 SIŁĄ działania człowieka (siła człowieka = P).")

7 MASZYNY PROSTE Już w czasach antycznych niektóre z tych urządzeń pozwalały człowiekowi zwielokrotnić siłę własnych mięśni i wykonywać szczególne prace, a nawet zrealizować wielkie dzieła, które możemy podziwiać do dziś. Taczka Obcęgi Dziadek do orzechów Huśtawka Waga Bloczek Maszyna prosta to urządzenie, które pozwala zrównoważyć lub pokonać OPÓR (ciężar, siłę oporu = R) SIŁĄ działania człowieka (siła człowieka = P). DŹWIGNIE Dźwignia to maszyna prosta złożona ze sztywnego drążka, który może obracać się wokół stałego punktu zwanego punktem podparcia. OPÓR PUNKT PODPARCIA SIŁA Również para dźwigni respektuje tę zasadę. Dźwignie klasyfikowane są ze względu na położenie osi wobec działających sił, czyli ze względu na pozycję SIŁY, OPORU i PUNKTU PODPARCIA. 7




8 1 Zbuduj dzwignie 1. typu - obcegi 1 1:1 X4 X8 8





9 1:1 1 1:1 1 1 X4 PUNKT PODPARCIA leży między OPOREM a SIŁĄ. Gotowy model 9





10 1 Zbuduj dzwignie. typu - dziadek do orzechów 1:1 X4 OPÓR znajduje się między SIŁĄ a PUNKTEM PODPARCIA. Gotowy model 10





11 14 Zbuduj dzwignie. typu: szczypce 1 X4 11






12 1:1 X4 X SIŁA znajduje się między OPOREM a PUNKTEM PODPARCIA. 1



13 Informacje naukowe: zysk mechaniczny dzwigni Dźwignia jest maszyną prostą skonstruowaną przez człowieka po to, by mógł wykonać pracę, redukując przyłożoną siłę. Na drążek działają dwie siły: SIŁA przyłożona i OPÓR. Tak więc używając dźwigni, mamy do czynienia z ZYSKIEM MECHANICZNYM, który można wyliczyć, biorąc pod uwagę również długość ramion SIŁY i OPORU. W dźwigni długość ramion odpowiada odległościom od punktu podparcia. PUNKT PODPARCIA Legenda: = ramię SIŁY = ramię OPORU = SIŁA przyłożona = siła OPORU WARUNKI RÓWNOWAGI x = x ZYSK MECHANICZNY = / SKONSTRUUJ I WYPRÓBUJ DŹWIGNIE 15 Skonstruuj punkt podparcia dzwigni i obciaznik 1 X4 X X7 1





14 X4 MONTOWANIE OBCIĄŻNIKA Gotowy obciążnik 14 W zadaniach nr przesuwaj punkt podparcia i sprawdzaj, naciskając ręką na ramię SIŁY, jakie różnice wystąpią między dźwigniami.
 z jednej strony dźwigni i naciśnij ręką (SIŁA) z drugiej strony, uważając na wywierany nacisk.")

15 16 Skonstruuj i wypróbuj dzwignie o równowadze trwalej Znajdź równowagę w urządzeniu tego rodzaju: umieść obciążnik (OPÓR) z jednej strony dźwigni i naciśnij ręką (SIŁA) z drugiej strony, uważając na wywierany nacisk. Zwróć uwagę na pozycję punktu podparcia! Ramię SIŁY jest dłuższe. SIŁA jest mniejsza niż OPÓR. EKSPERYMENTUJ! PUNKT PODPARCIA SIŁA OPÓR Nota: umieść na drążku punktu podparcia pierścień uszczelniający dźwigni, jak to pokazano na rysunku. Gotowy model 15
 z jednej strony dźwigni i naciśnij ręką (SIŁA) z drugiej strony, uważając na wywierany nacisk.")

16 17 Skonstruuj i wypróbuj dzwignie o równowadze obojetnej Znajdź równowagę w urządzeniu tego rodzaju: umieść obciążnik (OPÓR) z jednej strony dźwigni i naciśnij ręką (SIŁA) z drugiej strony, uważając na wywierany nacisk. Zwróć uwagę na pozycję punktu podparcia! Ramiona są tej samej długości. SIŁA jest taka sama jak OPÓR. EKSPERYMENTUJ! PUNKT PODPARCIA SIŁA OPÓR Nota: umieść na drążku punktu podparcia pierścień uszczelniający dźwigni, jak to pokazano na rysunku. Gotowy model 16

17 18 Skonstruuj i wypróbuj dzwignie o równowadze chwiejnej Znajdź równowagę w urządzeniu tego rodzaju: umieść obciążnik (OPÓR) z jednej strony dźwigni i naciśnij ręką (SIŁA) z drugiej strony, uważając na wywierany nacisk. Zwróć uwagę na pozycję punktu podparcia! Ramię OPORU jest dłuższe. SIŁA jest większa niż OPÓR. EKSPERYMENTUJ! PUNKT PODPARCIA SIŁA OPÓR Nota: umieść na drążku punktu podparcia pierścień uszczelniający dźwigni, jak to pokazano na rysunku. Gotowy model 17





18 19 Skonstruuj wage X6 X X4 X Waga to dźwignia 1.typu Gotowy model 1:1 EKSPERYMENTUJ! 18




19 0 Skonstruuj hustawke i wypróbuj 1 1:1 X4 X6 1:1 19







20 X4 Archimedes to wielki naukowiec, który już w III wieku p.n.e. eksperymentował z dźwigniami. Nota: dźwignia huśtawki powinna obracać się swobodnie wokół punktu podparcia. Ty też spróbuj: poszukaj równowagi huśtawki, zmieniając obciążenia i odległości między punktem podparcia a OPOREM i SIŁĄ. EKSPERYMENTUJ! Huśtawka to dźwignia 1. typu Gotowy model 0
 umieszczone w")


.")


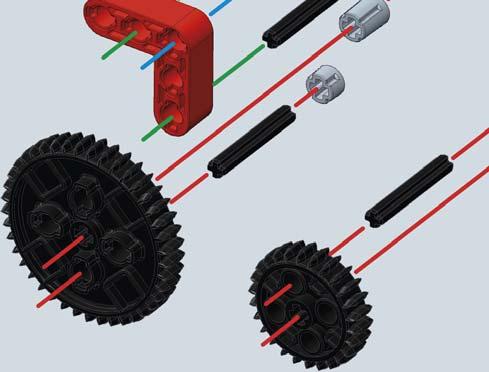
21 KOLA ZEBATE Koła zębate służą przekazywaniu ruchu poprzez osie (drążki) umieszczone w szczególny sposób; zęby nadają ruch. W parze kół zębatych, jeśli jedno obraca się w jedną stronę, to drugie w przeciwną; z tych dwóch kół jedno przekazuje ruch (koło napędzające), drugie ruch odbiera (koło napędzane). Jeśli chce się utrzymać ten sam kierunek obrotów, należy między dwoma kołami umieścić trzecie koło zębate. Koła zębate mają rożną wielkość, i różną liczbę zębów. Wiele kół zębatych tworzy przekładnie. 1 Skonstruuj stanowisko do prób odwróconej rotacji 1 X4 Gotowe stanowisko 1





22 Kierunek przeciwny do kierunku obrotów wskazówek zegara Kierunek zgodny z kierunkiem obrotów wskazówek zegara Gotowy model 1:1 1:1 4





23 Skonstruuj model do eksperymentu z rotacja bezposrednia X 18 X4 4 Stanowisko zbudowane w zadaniu nr Kierunek zgodny z kierunkiem obrotów wskazówek zegara 1:1 1:1 4 Kierunek zgodny z kierunkiem obrotów wskazówek zegara Gotowy model





24 Skonstruuj model do eksperymentu z ruchem przemiennym 41 6 X4 X5 Stanowisko zbudowane w zadaniu nr :1 Gotowy model 1:1 4 4


25 4 Skonstruuj naped pionowy Stanowisko zbudowane w zadaniu nr 1 X




26 Gotowy model 1:1 1:1 4 6



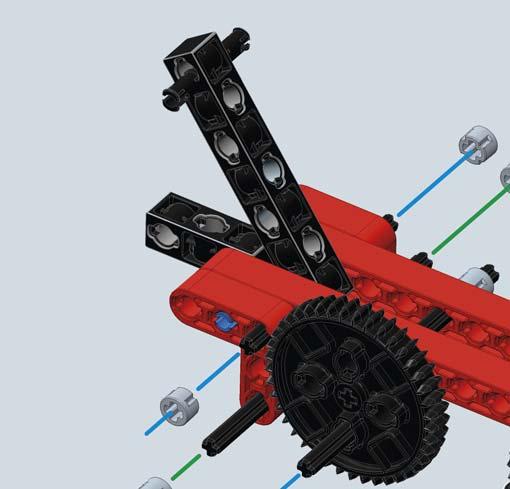
27 5 Skonstruuj naped pionowo-poziomy 6 Stanowisko zbudowane w zadaniu nr PRZELOZENIE PRZEKLADNI Przypatrz się uważnie kołom zębatym, kiedy się obracają i porównaj obroty wykonywane przez różne koła. Kiedy największe koło wykona jeden obrót, najmniejsze zrobi ich 4. W tym wypadku możesz uzyskać potwierdzenie, robiąc dzielenie lub wyliczając ułamek między liczbą zębów obu kół zębatych. Przykład jak wyliczyć przełożenie przekładni: 41 zębów (większe koło) = 4,1 obrotów 10 zębów (mniejsze koło) Gotowy model 1:1 7




28 DZIALANIA WSTEPNE Zmontuj stanowisko badawcze dla części napędowych X4 Zmontowane stanowisko badawcze 8






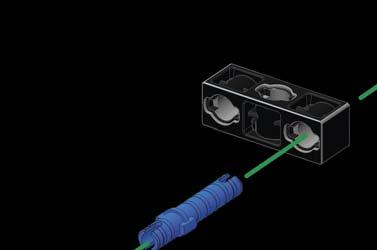
29 6 Sruba slimakowa do podnoszenia X6 X Informacje techniczno-naukowe Śruba ślimakowa zwana technicznie przekładnią ewolwentową, jest przekładnią cylindryczną śrubową. W połączeniu pomiędzy kołem zębatym i śrubą ślimakową, śruba ślimakowa jest elementem napędowym, gdyż ruch może być przenoszony wyłącznie od śruby do koła, a nie na odwrót. Śruba jest więc pożyteczna do zablokowania połączonego koła w określonym położeniu. Stanowisko badawcze zmontowane w trakcie działań wstępnych 10 1:1 1:1 Model końcowy 9






30 7 Sruba slimakowa jako przekladnia 5 X Przełożenie przekładni. Śruba ślimakowa umożliwia uzyskanie znacznych przełożeń. Obracaj pokrętłem i obserwuj powolny obrót śmigła. Stanowisko badawcze Banco zmontowane assemblato nella pre-attività w trakcie działań wstępnych Sprawdź montaż Model końcowy 1:1 5 1:1 0





31 8 W celu obrotu w przeciwnym kierunku uzyj modulu napedowego 4 X 1 18 X6 Włóż moduł między drążki, demontując częściowo stanowisko badawcze, następnie rozstaw koła zębate w sposób przedstawiony na rysunku. 4 Stanowisko badawcze zmontowane w trakcie działań wstępnych EKSPERYMENTUJ! Model końcowy 1:1 4 1:1 1






32 9 Zmontuj naped z koszem satelitów 4 X6 X Stanowisko badawcze zmontowane w trakcie działań wstępnych 4 EKSPERYMENTUJ! 4 18 Model końcowy 1:1 4 1:1



33 0 Antyczna machina wojenna: taran 1 X4 Część przednia



34 X X :1 5 1:1 1:1 1:1 1 4


35 X6 X4 5










36 4 4 X X5 4 Gotowy model Część przednia 6 1:1 4
MECHANIKI. Laboratorium. Konstrukcje od 1 do 35
 5 6 7 8 9 0 5 6 7 9 0 5 6 7 8 9 0 5 Laboratorium MECHANIKI Konstrukcje od do 5 Motaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek
5 6 7 8 9 0 5 6 7 9 0 5 6 7 8 9 0 5 Laboratorium MECHANIKI Konstrukcje od do 5 Motaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek
MECHANIKI. Laboratorium. Konstrukcje od1 do 30
 Laboratorium MECHANIKI Konstrukcje od do 0 4 5 6 7 8 9 0 4 5 Montaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek Złożenie belki z
Laboratorium MECHANIKI Konstrukcje od do 0 4 5 6 7 8 9 0 4 5 Montaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek Złożenie belki z
MECHANIKI. Laboratorium. Konstrukcje od 40 do 50
 Laboratorium MECHANIKI Konstrukcje od 0 do 50 0 1 - - - - - 5 6 7 8 9 50 - - - - - - Pierwszy samochód na świecie Dawny czteroosobowy samochód Skonstruuj przekładnię zębatą Skonstruuj mechaniczną skrzynię
Laboratorium MECHANIKI Konstrukcje od 0 do 50 0 1 - - - - - 5 6 7 8 9 50 - - - - - - Pierwszy samochód na świecie Dawny czteroosobowy samochód Skonstruuj przekładnię zębatą Skonstruuj mechaniczną skrzynię
TEMAT 21: Maszyny proste.
 TEMAT 21: Maszyny proste. Większość osób kojarzy pojęcie "maszyna" jako skomplikowaną mechanicznie konstrukcję jak np. obrabiarka, wiertarka czy inne urządzenie posiadające napęd. Tymczasem, w fizyce maszyną
TEMAT 21: Maszyny proste. Większość osób kojarzy pojęcie "maszyna" jako skomplikowaną mechanicznie konstrukcję jak np. obrabiarka, wiertarka czy inne urządzenie posiadające napęd. Tymczasem, w fizyce maszyną
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły.
 PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły. Pracę oznaczamy literą W Pracę obliczamy ze wzoru: W = F s W praca;
PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły. Pracę oznaczamy literą W Pracę obliczamy ze wzoru: W = F s W praca;
Układ kierowniczy. Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek:
 1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/16
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
PRACA. MOC. ENERGIA. 1/20
 PRACA. MOC. ENERGIA. 1/20 Czym jest energia? Większość zjawisk w przyrodzie związana jest z przemianami energii. Energia może zostać przekazana od jednego ciała do drugiego lub ulec przemianie z jednej
PRACA. MOC. ENERGIA. 1/20 Czym jest energia? Większość zjawisk w przyrodzie związana jest z przemianami energii. Energia może zostać przekazana od jednego ciała do drugiego lub ulec przemianie z jednej
MECHANIKI. Laboratorium. Konstrukcje od 31 do 39
 Laboratorium MECHANIKI Konstrukcje od do 9 5 6 7 8 9 - - - - - - - - - Zbuduj dźwig ze stałym bloczkiem Zbuduj dźwig z ruchomym bloczkiem Skonstruuj połączone koła pasowe Żuraw wieżowy z wciągarką na silnik
Laboratorium MECHANIKI Konstrukcje od do 9 5 6 7 8 9 - - - - - - - - - Zbuduj dźwig ze stałym bloczkiem Zbuduj dźwig z ruchomym bloczkiem Skonstruuj połączone koła pasowe Żuraw wieżowy z wciągarką na silnik
PL B1. ŻBIKOWSKI JERZY, Zielona Góra, PL BUP 03/06. JERZY ŻBIKOWSKI, Zielona Góra, PL WUP 09/11 RZECZPOSPOLITA POLSKA
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Maszyny proste. W razie potrzeby Edukatorzy chętnie udzielą pomocy.
 Maszyny proste Drogi Nauczycielu! Witamy serdecznie w Centrum Nauki Experyment. Przygotowana dla uczniów karta pracy zawiera pytania dotyczące stanowisk znajdujących się na sali wystawienniczej. Zadaniem
Maszyny proste Drogi Nauczycielu! Witamy serdecznie w Centrum Nauki Experyment. Przygotowana dla uczniów karta pracy zawiera pytania dotyczące stanowisk znajdujących się na sali wystawienniczej. Zadaniem
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
Walce do zwijania blach DOKUMENTACJA TECHNICZNO RUCHOWA
 Walce do zwijania blach DOKUMENTACJA TECHNICZNO Stron 10 Strona 1 Spis treści I. Rysunek poglądowy maszyny 2 II. Podstawowe dane techniczne 4 III. Konstrukcja i przeznaczenie 4 IV. Układ napędowy 8 V.
Walce do zwijania blach DOKUMENTACJA TECHNICZNO Stron 10 Strona 1 Spis treści I. Rysunek poglądowy maszyny 2 II. Podstawowe dane techniczne 4 III. Konstrukcja i przeznaczenie 4 IV. Układ napędowy 8 V.
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
Podstawy Konstrukcji Maszyn. Wykład nr. 13 Przekładnie zębate
 Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Mechanika teoretyczna
 Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP (96) Data i numer zgłoszenia patentu europejskiego:
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP (96) Data i numer zgłoszenia patentu europejskiego:") RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 3011940 (96) Data i numer zgłoszenia patentu europejskiego: 08.10.2015 15460094.4 (13) (51) T3 Int.Cl. A61G 5/10 (2006.01)
RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 3011940 (96) Data i numer zgłoszenia patentu europejskiego: 08.10.2015 15460094.4 (13) (51) T3 Int.Cl. A61G 5/10 (2006.01)
Obliczenia obciążenia osi. Informacje ogólne na temat obliczeń obciążenia osi
 Informacje ogólne na temat obliczeń obciążenia osi Każdy rodzaj transportu za pomocą samochodów ciężarowych wymaga, aby podwozie dostarczane z fabryki było wyposażone w pewną formę zabudowy. Informacje
Informacje ogólne na temat obliczeń obciążenia osi Każdy rodzaj transportu za pomocą samochodów ciężarowych wymaga, aby podwozie dostarczane z fabryki było wyposażone w pewną formę zabudowy. Informacje
(12) OPIS PATENTOWY (19)PL (11)182858
 OPIS PATENTOWY (19)PL (11)182858") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)182858 (21) Numer zgłoszenia. 319132 Urząd Patentowy zgłoszenia. 2 0.0 3.1 9 9 7 Rzeczypospolitej Polskiej (51) IntCl7 B62K 5/02 (54) Rower trójkołowy
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)182858 (21) Numer zgłoszenia. 319132 Urząd Patentowy zgłoszenia. 2 0.0 3.1 9 9 7 Rzeczypospolitej Polskiej (51) IntCl7 B62K 5/02 (54) Rower trójkołowy
4. Oś Z. 4. Oś Z. Written By: Josef Prusa manual.prusa3d.com/ Page 1 of 17
 4. Oś Z Written By: Josef Prusa 2017 manual.prusa3d.com/ Page 1 of 17 Step 1 Potrzebne narzędzia Klucze płaskie 13/17 mm Śrubokręt płaski 3,6 mm Małe szczypce uniwersalne (kombinerki) Klucze imbusowe 2,5
4. Oś Z Written By: Josef Prusa 2017 manual.prusa3d.com/ Page 1 of 17 Step 1 Potrzebne narzędzia Klucze płaskie 13/17 mm Śrubokręt płaski 3,6 mm Małe szczypce uniwersalne (kombinerki) Klucze imbusowe 2,5
Plan wynikowy z fizyki w klasie drugiej gimnazjum
 Plan wynikowy z fizyki w klasie drugiej gimnazjum opracowany dla uczniów z upośledzeniem umysłowym w stopniu lekkim na podstawie programu Mirosławy Wiechowskiej nr DKW-4014-56/00 Opracowała: Marzena Draszczuk
Plan wynikowy z fizyki w klasie drugiej gimnazjum opracowany dla uczniów z upośledzeniem umysłowym w stopniu lekkim na podstawie programu Mirosławy Wiechowskiej nr DKW-4014-56/00 Opracowała: Marzena Draszczuk
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 186864 (21) Numer zgłoszenia: 326088 (22) Data zgłoszenia: 28.04.1998 (13) B1 (51) IntCl7 F03D 3/02 (54)
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 186864 (21) Numer zgłoszenia: 326088 (22) Data zgłoszenia: 28.04.1998 (13) B1 (51) IntCl7 F03D 3/02 (54)
PL B1. Maszyna do kształtowania elementów z udoskonalonymi mechanizmami przekładniowymi. FWU KUANG ENTERPRISES CO., LTD.
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210853 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 378430 (22) Data zgłoszenia: 14.12.2005 (51) Int.Cl. B21J 9/18 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210853 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 378430 (22) Data zgłoszenia: 14.12.2005 (51) Int.Cl. B21J 9/18 (2006.01)
Gilotyna Modele Q 11 2 x 1300 Q 11 2 x 2000 Q 11 2,5 x 1600 Q 11 3 x 1300 Q 11 4 x 2000 Q 11 4 x 2500 DOKUMENTACJA TECHNICZNO RUCHOWA
 Modele Q 11 2 x 1300 Q 11 2 x 2000 Q 11 2,5 x 1600 Q 11 3 x 1300 Q 11 4 x 2000 Q 11 4 x 2500 DOKUMENTACJA TECHNICZNO Stron 7 Strona 1 Spis treści 1. Rysunek poglądowy maszyny 2 2. Podstawowe dane techniczne
Modele Q 11 2 x 1300 Q 11 2 x 2000 Q 11 2,5 x 1600 Q 11 3 x 1300 Q 11 4 x 2000 Q 11 4 x 2500 DOKUMENTACJA TECHNICZNO Stron 7 Strona 1 Spis treści 1. Rysunek poglądowy maszyny 2 2. Podstawowe dane techniczne
PL B1. LISICKI JANUSZ ZAKŁAD PRODUKCYJNO HANDLOWO USŁUGOWY EXPORT IMPORT, Pukinin, PL BUP 17/16. JANUSZ LISICKI, Pukinin, PL
 PL 226242 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226242 (13) B1 (21) Numer zgłoszenia: 411231 (51) Int.Cl. A01D 46/26 (2006.01) A01D 46/00 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 226242 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226242 (13) B1 (21) Numer zgłoszenia: 411231 (51) Int.Cl. A01D 46/26 (2006.01) A01D 46/00 (2006.01) Urząd Patentowy Rzeczypospolitej
Bryła sztywna Zadanie domowe
 Bryła sztywna Zadanie domowe 1. Podczas ruszania samochodu, w pewnej chwili prędkość środka przedniego koła wynosiła. Sprawdź, czy pomiędzy kołem a podłożem występował poślizg, jeżeli średnica tego koła
Bryła sztywna Zadanie domowe 1. Podczas ruszania samochodu, w pewnej chwili prędkość środka przedniego koła wynosiła. Sprawdź, czy pomiędzy kołem a podłożem występował poślizg, jeżeli średnica tego koła
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
PL B1. PRZEMYSŁOWY INSTYTUT AUTOMATYKI I POMIARÓW PIAP, Warszawa, PL BUP 13/09. RAFAŁ CZUPRYNIAK, Warszawa, PL
 PL 215871 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 215871 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 384030 (22) Data zgłoszenia: 12.12.2007 (51) Int.Cl.
PL 215871 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 215871 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 384030 (22) Data zgłoszenia: 12.12.2007 (51) Int.Cl.
Test powtórzeniowy nr 1
 Test powtórzeniowy nr 1 Grupa B... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Wykres przedstawia zależność
Test powtórzeniowy nr 1 Grupa B... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Wykres przedstawia zależność
Spis treści. Przedmowa 11
 Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
, PCT/EP03/006959
 PL 212252 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 212252 (21) Numer zgłoszenia: 373407 (22) Data zgłoszenia: 01.07.2003 (86) Data i numer zgłoszenia
PL 212252 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 212252 (21) Numer zgłoszenia: 373407 (22) Data zgłoszenia: 01.07.2003 (86) Data i numer zgłoszenia
ĆWICZENIE NR.6. Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych
 ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
BRANO Podnośniki i wciągniki BRANO
 BRANO Podnośniki i wciągniki BRANO Wciągniki łańcuchowe RZC Podnośniki Brano katalog 2 ` TYP UDŹWIG LICZBA ŁAŃCUCHÓW ŁAŃCUCH NACISK NA DŹWIGNIĘ (N) PRĘDKOŚĆ WCIĄGANIA (M/MIN)* ZAKRES TEMPERATUR PRACY (
BRANO Podnośniki i wciągniki BRANO Wciągniki łańcuchowe RZC Podnośniki Brano katalog 2 ` TYP UDŹWIG LICZBA ŁAŃCUCHÓW ŁAŃCUCH NACISK NA DŹWIGNIĘ (N) PRĘDKOŚĆ WCIĄGANIA (M/MIN)* ZAKRES TEMPERATUR PRACY (
ROBOTY ZDALNIE STAROWANE
 IMPORTER: educarium spółka z o.o. ul. Grunwaldzka 207, 85-451 Bydgoszcz tel. (52) 32 47 800, faks (52) 32 10 251, 32 47 880 e-mail: info@educarium.pl portal edukacyjny: www.educarium.pl sklep internetowy:
IMPORTER: educarium spółka z o.o. ul. Grunwaldzka 207, 85-451 Bydgoszcz tel. (52) 32 47 800, faks (52) 32 10 251, 32 47 880 e-mail: info@educarium.pl portal edukacyjny: www.educarium.pl sklep internetowy:
(13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 B23K 7/10 RZECZPOSPOLITA POLSKA. Urząd Patentowy Rzeczypospolitej Polskiej
 B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 B23K 7/10 RZECZPOSPOLITA POLSKA. Urząd Patentowy Rzeczypospolitej Polskiej") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175070 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306629 Data zgłoszenia: 29.12.1994 (51) IntCl6: B23K 7/10 (54) Przecinarka
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175070 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306629 Data zgłoszenia: 29.12.1994 (51) IntCl6: B23K 7/10 (54) Przecinarka
Test powtórzeniowy nr 1
 Test powtórzeniowy nr 1 Grupa C... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Wykres przedstawia zależność
Test powtórzeniowy nr 1 Grupa C... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Wykres przedstawia zależność
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 185043 (21) Numer zgłoszenia: 328197 (22) Data zgłoszenia: 14.01.1997 (86) Data i numer zgłoszenia międzynarodowego:
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 185043 (21) Numer zgłoszenia: 328197 (22) Data zgłoszenia: 14.01.1997 (86) Data i numer zgłoszenia międzynarodowego:
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Moment obrotowy i moc silnika a jego obciążenie (3)
") Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej
 Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
Rys. 1. Pływanie ciał - identyfikacja objętość części zanurzonej i objętości bryły parcia
 Wypór i równowaga ciał pływających po powierzchni Reakcja cieczy na ciało w niej zanurzone nazywa się wyporem. Siła wyporu działa pionowo i skierowana jest w górę. Wypór hydrostatyczny (można też mówić
Wypór i równowaga ciał pływających po powierzchni Reakcja cieczy na ciało w niej zanurzone nazywa się wyporem. Siła wyporu działa pionowo i skierowana jest w górę. Wypór hydrostatyczny (można też mówić
MECHANIKI. Laboratorium CIĘŻARÓWKI. Konstrukcje od 1 do 10
 Laboratorium MECHANIKI CIĘŻARÓWKI Konstrukcje od 1 do 10 1 - Jak działa mechanizm różnicowy 2 - Historyczna ciężarówka 3 - Ciężarówka do użycia w kopalni 4 - Ciężarówka europejska 5 - Narzędzia robocze:
Laboratorium MECHANIKI CIĘŻARÓWKI Konstrukcje od 1 do 10 1 - Jak działa mechanizm różnicowy 2 - Historyczna ciężarówka 3 - Ciężarówka do użycia w kopalni 4 - Ciężarówka europejska 5 - Narzędzia robocze:
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Wyznaczenie równowagi w mechanizmie. Przykład 6
 Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Instrukcja użytkowania pionizatora dla dzieci i młodzieży Rabbit
 Instrukcja użytkowania pionizatora dla dzieci i młodzieży Rabbit 1. Rabbit gotowy do użytku Rabbit jest dostarczany rozłożony, aby zajmował jak najmniej miejsca podczas transportu. Aby złożyć pionizator
Instrukcja użytkowania pionizatora dla dzieci i młodzieży Rabbit 1. Rabbit gotowy do użytku Rabbit jest dostarczany rozłożony, aby zajmował jak najmniej miejsca podczas transportu. Aby złożyć pionizator
Instrukcja obsługi - PL IN 564 Ławka wielofunkcyjna insportline ADJUST
 Instrukcja obsługi - PL IN 564 Ławka wielofunkcyjna insportline ADJUST Dziękujemy za zakup naszego produktu. Chociaż dokładamy wszelkich starań, aby zapewnić jakość każdego z naszych produktów, mogą wystąpić
Instrukcja obsługi - PL IN 564 Ławka wielofunkcyjna insportline ADJUST Dziękujemy za zakup naszego produktu. Chociaż dokładamy wszelkich starań, aby zapewnić jakość każdego z naszych produktów, mogą wystąpić
12 RUCH OBROTOWY BRYŁY SZTYWNEJ I. a=εr. 2 t. Włodzimierz Wolczyński. Przyspieszenie kątowe. ε przyspieszenie kątowe [ ω prędkość kątowa
 Włodzimierz Wolczyński Przyspieszenie kątowe 1 RUCH OROTOWY RYŁY SZTYWNEJ I = = ε przyspieszenie kątowe [ ] ω prędkość kątowa = = T okres, = - częstotliwość s=αr v=ωr a=εr droga = kąt x promień prędkość
Włodzimierz Wolczyński Przyspieszenie kątowe 1 RUCH OROTOWY RYŁY SZTYWNEJ I = = ε przyspieszenie kątowe [ ] ω prędkość kątowa = = T okres, = - częstotliwość s=αr v=ωr a=εr droga = kąt x promień prędkość
Skrzynka narzędzi do ustawienia i regulacji mechanizmu rozrządu silników z łańcuchem Zestaw narzędzi do ustawiania mechanizmu rozrządu silników
 Skrzynka narzędzi do ustawienia i regulacji mechanizmu rozrządu silników z łańcuchem Zestaw narzędzi do ustawiania mechanizmu rozrządu silników benzynowych i diesla (patrz tabela zastosowań) Skrzynka do
Skrzynka narzędzi do ustawienia i regulacji mechanizmu rozrządu silników z łańcuchem Zestaw narzędzi do ustawiania mechanizmu rozrządu silników benzynowych i diesla (patrz tabela zastosowań) Skrzynka do
PL 210006 B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL
 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 210006 (21) Numer zgłoszenia: 380722 (22) Data zgłoszenia: 01.10.2006 (13) B1 (51) Int.Cl. A61G 5/02 (2006.01)
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 210006 (21) Numer zgłoszenia: 380722 (22) Data zgłoszenia: 01.10.2006 (13) B1 (51) Int.Cl. A61G 5/02 (2006.01)
W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ
 POLITECHNIKA BIAŁOSTOCKA Wydział Budownictwa i Inżynierii Środowiska Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: POWIERZCHNIA SWOBODNA CIECZY W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ Ćwiczenie
POLITECHNIKA BIAŁOSTOCKA Wydział Budownictwa i Inżynierii Środowiska Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: POWIERZCHNIA SWOBODNA CIECZY W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ Ćwiczenie
Klasa 3. Trójkąty. 1. Trójkąt prostokątny ma przyprostokątne p i q oraz przeciwprostokątną r. Z twierdzenia Pitagorasa wynika równość:
 Klasa 3. Trójkąty. 1. Trójkąt prostokątny ma przyprostokątne p i q oraz przeciwprostokątną r. Z twierdzenia Pitagorasa wynika równość: A. r 2 + q 2 = p 2 B. p 2 + r 2 = q 2 C. p 2 + q 2 = r 2 D. p + q
Klasa 3. Trójkąty. 1. Trójkąt prostokątny ma przyprostokątne p i q oraz przeciwprostokątną r. Z twierdzenia Pitagorasa wynika równość: A. r 2 + q 2 = p 2 B. p 2 + r 2 = q 2 C. p 2 + q 2 = r 2 D. p + q
Návod k použití. Instrukcja obsługi. Návod k použitiu. Instruction Leaflet PŘED POUŽITÍM SI PROSÍM PŘEČTĚTE DŮKLADNĚ NÁVOD A USCHOVEJTE HO!
 CZ Instrukcja obsługi Návod k použití PRZED UŻYCIEM PRZECZYTAJ SZCZEGÓŁY I ZACHOWAJ INSTRUKCJĘ OBSŁUGI PŘED POUŽITÍM SI PROSÍM PŘEČTĚTE DŮKLADNĚ NÁVOD A USCHOVEJTE HO! SK Instruction Leaflet Návod k použitiu
CZ Instrukcja obsługi Návod k použití PRZED UŻYCIEM PRZECZYTAJ SZCZEGÓŁY I ZACHOWAJ INSTRUKCJĘ OBSŁUGI PŘED POUŽITÍM SI PROSÍM PŘEČTĚTE DŮKLADNĚ NÁVOD A USCHOVEJTE HO! SK Instruction Leaflet Návod k použitiu
OBLICZANIE KÓŁK ZĘBATYCH
 OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
: ETURN 50 ETURN 64 ETURN 74 ETURN
 ETURN Nowe, rewolucyjne odwracanie palet Instrukcja obsługi dla urządzeń : ETURN 50 ETURN 64 ETURN 74 ETURN 102 ETURN Instrukcja bezpieczeństwa Proszę z uwagą przeczytać informacje i znaki dotyczące bezpieczeństwa:
ETURN Nowe, rewolucyjne odwracanie palet Instrukcja obsługi dla urządzeń : ETURN 50 ETURN 64 ETURN 74 ETURN 102 ETURN Instrukcja bezpieczeństwa Proszę z uwagą przeczytać informacje i znaki dotyczące bezpieczeństwa:
WZORU UŻYTKOWEGO PL Y1. KOPEX MACHINERY SPÓŁKA AKCYJNA, Zabrze, PL BUP 25/12
 PL 66689 Y1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 120040 (22) Data zgłoszenia: 23.05.2011 (19) PL (11) 66689 (13) Y1
PL 66689 Y1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 120040 (22) Data zgłoszenia: 23.05.2011 (19) PL (11) 66689 (13) Y1
Od redakcji. Symbolem oznaczono zadania wykraczające poza zakres materiału omówionego w podręczniku Fizyka z plusem cz. 1.
 Od redakcji Niniejszy zbiór zadań powstał z myślą o tych wszystkich, dla których rozwiązanie zadania z fizyki nie polega wyłącznie na mechanicznym przekształceniu wzorów i podstawieniu do nich danych.
Od redakcji Niniejszy zbiór zadań powstał z myślą o tych wszystkich, dla których rozwiązanie zadania z fizyki nie polega wyłącznie na mechanicznym przekształceniu wzorów i podstawieniu do nich danych.
INFORMACJA O PRODUKCIE
 INFORMACJA O PRODUKCIE Z4500 Urządzenie do ustawiania silnika/ blokowania mniejszego koła przekładni zębatej Multi-Lock II Dostępny również: AST4501 Przedłużacz mostowy G.B: Patent Ozn. GB 2365923B U.S.:
INFORMACJA O PRODUKCIE Z4500 Urządzenie do ustawiania silnika/ blokowania mniejszego koła przekładni zębatej Multi-Lock II Dostępny również: AST4501 Przedłużacz mostowy G.B: Patent Ozn. GB 2365923B U.S.:
SZKOŁA POLICEALNA dla dorosłych
 SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
Zestaw Demonstracyjny. Mechanika
 Zestaw Demonstracyjny Mechanika 1 Zestaw Demonstracyjny Mechanika Zamówienie nr 43080 Składniki Spis składników...3 Diagram składników...4 Uwagi do zestawu doświadczalnego...5 Doświadczenia...6-15 1. Siłomierz
Zestaw Demonstracyjny Mechanika 1 Zestaw Demonstracyjny Mechanika Zamówienie nr 43080 Składniki Spis składników...3 Diagram składników...4 Uwagi do zestawu doświadczalnego...5 Doświadczenia...6-15 1. Siłomierz
BADANIE STANÓW RÓWNOWAGI UKŁADU MECHANICZNEGO
 Ćwiczenie 3 BADANIE STANÓW RÓWNOWAGI UKŁADU MECHANICZNEGO 3.. Cel ćwiczenia Celem ćwiczenia jest teoretyczne i doświadczalne wyznaczenie położeń równowagi i określenie stanu równowagi prostego układu mechanicznego
Ćwiczenie 3 BADANIE STANÓW RÓWNOWAGI UKŁADU MECHANICZNEGO 3.. Cel ćwiczenia Celem ćwiczenia jest teoretyczne i doświadczalne wyznaczenie położeń równowagi i określenie stanu równowagi prostego układu mechanicznego
Test powtórzeniowy nr 1
 Test powtórzeniowy nr 1 Grupa A... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Na wykresie przedstawiono zależność
Test powtórzeniowy nr 1 Grupa A... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Na wykresie przedstawiono zależność
Mechanika. Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji.
 Mechanika Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji. Przyłożenie układu zerowego (układ sił równoważących się, np. dwie siły o takiej samej mierze,
Mechanika Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji. Przyłożenie układu zerowego (układ sił równoważących się, np. dwie siły o takiej samej mierze,
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 19/10
 PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
GM System przedstawia: Projektowanie części maszyn w systemie CAD SOLID EDGE na wybranych przykładach
 GM System przedstawia: Projektowanie części maszyn w systemie CAD SOLID EDGE System SOLID EDGE oferuje rozwiązania umożliwiające szybkie i poprawne projektowanie CAD 3D/2D w różnych branżach inżynierskich.
GM System przedstawia: Projektowanie części maszyn w systemie CAD SOLID EDGE System SOLID EDGE oferuje rozwiązania umożliwiające szybkie i poprawne projektowanie CAD 3D/2D w różnych branżach inżynierskich.
Instrukcja montażu i obsługi EB PL. Napęd ręczny montowany z boku zaworu typ dla skoku nominalnego do 30 mm
 Napęd ręczny montowany z boku zaworu typ 3273 dla skoku nominalnego do 30 mm Instrukcja montażu i obsługi EB 8312-2 PL Wydanie: listopad 2015 (10/13) Wskazówki i ich znaczenie NIEBEZPIECZEŃSTWO! Niebezpieczne
Napęd ręczny montowany z boku zaworu typ 3273 dla skoku nominalnego do 30 mm Instrukcja montażu i obsługi EB 8312-2 PL Wydanie: listopad 2015 (10/13) Wskazówki i ich znaczenie NIEBEZPIECZEŃSTWO! Niebezpieczne
WZORU UŻYTKOWEGO PL Y1 B62K 5/04 ( ) Białoń Leszek, Nowy Sącz, PL BUP 22/07. Leszek Białoń, Nowy Sącz, PL
 Białoń Leszek, Nowy Sącz, PL BUP 22/07. Leszek Białoń, Nowy Sącz, PL") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 116072 (22) Data zgłoszenia: 19.04.2006 (19) PL (11) 64106 (13) Y1 (51) Int.Cl.
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 116072 (22) Data zgłoszenia: 19.04.2006 (19) PL (11) 64106 (13) Y1 (51) Int.Cl.
ności od kinematyki zazębie
 Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
PL 210299 B1. MICHALCZEWSKI LECH PRZEDSIĘBIORSTWO PRODUKCYJNO-HANDLOWO-USŁUGOWE PLEXIFORM, Bojano, PL 16.03.2009 BUP 06/09 30.12.
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210299 (13) B1 (21) Numer zgłoszenia: 383355 (51) Int.Cl. B65B 1/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.09.2007
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210299 (13) B1 (21) Numer zgłoszenia: 383355 (51) Int.Cl. B65B 1/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.09.2007
(12) OPIS PATENTOWY (19)PL (11) (13) B1
 OPIS PATENTOWY (19)PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)160312 (13) B1 (21) Numer zgłoszenia: 280556 (51) IntCl5: Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.07.1989 F16H 57/12 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)160312 (13) B1 (21) Numer zgłoszenia: 280556 (51) IntCl5: Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.07.1989 F16H 57/12 (54)
Podstawy Konstrukcji Maszyn
 0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
PIŁA ELEKTRYCZNA DO METALU
 PIŁA ELEKTRYCZNA DO METALU INSTRUKCJA OBSŁUGI 2 SPIS TREŚCI I. ZASTOSOWANIE... 2 II. WYMIARY I PARAMETRY TECHNICZNE... 2 III. KONSTRUKCJA PIŁY... 3 IV. SMAROWANIE... 4 V. PRZEGLĄD I KONSERWACJA... 4 VI.
PIŁA ELEKTRYCZNA DO METALU INSTRUKCJA OBSŁUGI 2 SPIS TREŚCI I. ZASTOSOWANIE... 2 II. WYMIARY I PARAMETRY TECHNICZNE... 2 III. KONSTRUKCJA PIŁY... 3 IV. SMAROWANIE... 4 V. PRZEGLĄD I KONSERWACJA... 4 VI.
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180566 (21) Numer zgłoszenia: 312590 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 30.01.1996 (51) IntCl7 B23P 19/06 B25B
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180566 (21) Numer zgłoszenia: 312590 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 30.01.1996 (51) IntCl7 B23P 19/06 B25B
Wyznaczenie gęstości cieczy za pomocą wagi hydrostatycznej. Spis przyrządów: waga techniczna (szalkowa), komplet odważników, obciążnik, ławeczka.
, komplet odważników, obciążnik, ławeczka.") Cel ćwiczenia: WYZNACZANIE GĘSTOŚCI CIECZY ZA POMOCĄ WAGI HYDROSTATYCZNEJ Wyznaczenie gęstości cieczy za poocą wagi hydrostatycznej. Spis przyrządów: waga techniczna (szalkowa), koplet odważników, obciążnik,
Cel ćwiczenia: WYZNACZANIE GĘSTOŚCI CIECZY ZA POMOCĄ WAGI HYDROSTATYCZNEJ Wyznaczenie gęstości cieczy za poocą wagi hydrostatycznej. Spis przyrządów: waga techniczna (szalkowa), koplet odważników, obciążnik,
II. Redukcja układów sił. A. Układy płaskie. II.A.1. Wyznaczyć siłę równoważną (wypadkową) podanemu układowi sił zdefiniowanychw trzy różne sposoby.
 podanemu układowi sił zdefiniowanychw trzy różne sposoby.") II. Redukcja układów sił A. Układy płaskie II.A.1. Wyznaczyć siłę równoważną (wypadkową) podanemu układowi sił zdefiniowanychw trzy różne sposoby. II.A.2. Słup AB podtrzymywany jest w pozycji pionowej
II. Redukcja układów sił A. Układy płaskie II.A.1. Wyznaczyć siłę równoważną (wypadkową) podanemu układowi sił zdefiniowanychw trzy różne sposoby. II.A.2. Słup AB podtrzymywany jest w pozycji pionowej
PL B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL BUP 12/14. ANTONI SZUMANOWSKI, Warszawa, PL PAWEŁ KRAWCZYK, Ciechanów, PL
 PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
OWE PRZEKŁADNIE WALCOWE O ZĘBACH Z BACH ŚRUBOWYCH
 CZOŁOWE OWE PRZEKŁADNIE WALCOWE O ZĘBACH Z BACH ŚRUBOWYCH Klasyfikacja przekładni zębatych w zależności od kinematyki zazębień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe)
CZOŁOWE OWE PRZEKŁADNIE WALCOWE O ZĘBACH Z BACH ŚRUBOWYCH Klasyfikacja przekładni zębatych w zależności od kinematyki zazębień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe)
Przykład 1 Dany jest płaski układ czterech sił leżących w płaszczyźnie Oxy. Obliczyć wektor główny i moment główny tego układu sił.
 Przykład 1 Dany jest płaski układ czterech sił leżących w płaszczyźnie Oxy Obliczyć wektor główny i moment główny tego układu sił. Wektor główny układu sił jest równy Moment główny układu wynosi Przykład
Przykład 1 Dany jest płaski układ czterech sił leżących w płaszczyźnie Oxy Obliczyć wektor główny i moment główny tego układu sił. Wektor główny układu sił jest równy Moment główny układu wynosi Przykład
WZORU UŻYTKOWEGO PL Y1. PRZEDSIĘBIORSTWO HAK SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Wrocław, PL BUP 02/
 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 118347 (22) Data zgłoszenia: 13.07.2009 (19) PL (11) 65951 (13) Y1 (51) Int.Cl.
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 118347 (22) Data zgłoszenia: 13.07.2009 (19) PL (11) 65951 (13) Y1 (51) Int.Cl.
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 03/08. BOGDAN BRANOWSKI, Poznań, PL JAROSŁAW FEDORCZUK, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
m OPIS OCHRONNY PL 59825
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA m OPIS OCHRONNY PL 59825 WZORU UŻYTKOWEGO u) Y1 (21) Numer zgłoszenia: 108523 51) Intel7: Urząd Patentowy Rzeczypospolitej Polskiej @ Data zgłoszenia: 19.08.1998
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA m OPIS OCHRONNY PL 59825 WZORU UŻYTKOWEGO u) Y1 (21) Numer zgłoszenia: 108523 51) Intel7: Urząd Patentowy Rzeczypospolitej Polskiej @ Data zgłoszenia: 19.08.1998
PL B1. POLITECHNIKA ŚLĄSKA, Gliwice, PL
 PL 214302 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 214302 (21) Numer zgłoszenia: 379747 (22) Data zgłoszenia: 22.05.2006 (13) B1 (51) Int.Cl.
PL 214302 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 214302 (21) Numer zgłoszenia: 379747 (22) Data zgłoszenia: 22.05.2006 (13) B1 (51) Int.Cl.
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Wyznaczanie warunku równowagi dźwigni dwustronnej.
 1 Wyznaczanie warunku równowagi dźwigni dwustronnej. Czas trwania zajęć: 1h Określenie wiedzy i umiejętności wymaganej u uczniów przed przystąpieniem do realizacji zajęć: Uczeń: - wie, że maszyny proste
1 Wyznaczanie warunku równowagi dźwigni dwustronnej. Czas trwania zajęć: 1h Określenie wiedzy i umiejętności wymaganej u uczniów przed przystąpieniem do realizacji zajęć: Uczeń: - wie, że maszyny proste
Zestaw montażowy 1:10EP Monstertruck Nr produktu
 INSTRUKCJA OBSŁUGI Zestaw montażowy 1:10EP Monstertruck Nr produktu 236728 Strona 1 z 21 7.Montaż a) Przekładnia przednia Przekładnia przednia i tylna są identycznie oprócz osi napędowej silnika (w przekładni
INSTRUKCJA OBSŁUGI Zestaw montażowy 1:10EP Monstertruck Nr produktu 236728 Strona 1 z 21 7.Montaż a) Przekładnia przednia Przekładnia przednia i tylna są identycznie oprócz osi napędowej silnika (w przekładni
PL 212000 B1. WINDA WARSZAWA SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Warszawa, PL 26.11.2007 BUP 24/07. ANDRZEJ KATNER, Warszawa, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212000 (13) B1 (21) Numer zgłoszenia: 379699 (51) Int.Cl. B66B 11/08 (2006.01) B66B 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212000 (13) B1 (21) Numer zgłoszenia: 379699 (51) Int.Cl. B66B 11/08 (2006.01) B66B 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
Zestaw doświadczalny - siły elektromagnetyczne [ BAP_ doc ]
![Zestaw doświadczalny - siły elektromagnetyczne [ BAP_ doc ]](/thumbs/103/159032840.jpg "Zestaw doświadczalny - siły elektromagnetyczne [ BAP_ doc ]") Zestaw doświadczalny - siły elektromagnetyczne [ BAP_1152077.doc ] Informacje ogólne Zestaw doświadczalny umożliwia uczniom przeprowadzenie szeregu doświadczeń związanych z tematem sił elektromagnetycznych,
Zestaw doświadczalny - siły elektromagnetyczne [ BAP_1152077.doc ] Informacje ogólne Zestaw doświadczalny umożliwia uczniom przeprowadzenie szeregu doświadczeń związanych z tematem sił elektromagnetycznych,
Podstawy urządzeń okrętowych
 Podstawy urządzeń okrętowych - wykład URZĄDZENIA STEROWE Literatura: Perepeczko Andrzej; Okrętowe urządzenia sterowe, Wyd. Morskie, Gdańsk 1983 (sygnatura II 181564, II 181565) Orszulok Wojciech, Wewiórski
Podstawy urządzeń okrętowych - wykład URZĄDZENIA STEROWE Literatura: Perepeczko Andrzej; Okrętowe urządzenia sterowe, Wyd. Morskie, Gdańsk 1983 (sygnatura II 181564, II 181565) Orszulok Wojciech, Wewiórski
NAPĘD SILNIKOWY NM DO ROZŁĄCZNIKÓW typu NAL i NALF
 NAPĘD SILNIKOWY NM 24...220 DO ROZŁĄCZNIKÓW typu NAL i NALF Zaprojektowany do sterowania zdalnego Instrukcja montażu i eksploatacji 1. WSTĘP Napęd silnikowy można montować bezpośrednio na rozłączniku lub
NAPĘD SILNIKOWY NM 24...220 DO ROZŁĄCZNIKÓW typu NAL i NALF Zaprojektowany do sterowania zdalnego Instrukcja montażu i eksploatacji 1. WSTĘP Napęd silnikowy można montować bezpośrednio na rozłączniku lub
CZĘŚĆ A 18 pkt. 3. Które z poniższych brył A, B, C, D przedstawiają bryłę zaznaczoną kolorem szarym?
 WYDZIAŁ ARCHITEKTURY POLITECHNIKI GDAŃSKIEJ T E S T K W A L I F I K A C Y J N Y Z P R E D Y S P O Z Y C J I D O Z A W O D U A R C H I T E K T A GDAŃSK, 6 CZERWCA 2009, CZAS TRWANIA TESTU (CZĘŚĆ A + B +
WYDZIAŁ ARCHITEKTURY POLITECHNIKI GDAŃSKIEJ T E S T K W A L I F I K A C Y J N Y Z P R E D Y S P O Z Y C J I D O Z A W O D U A R C H I T E K T A GDAŃSK, 6 CZERWCA 2009, CZAS TRWANIA TESTU (CZĘŚĆ A + B +
PRZEKŁADNIE ŁAŃCUCHOWE
 PRZEKŁADNIE ŁAŃCUCHOWE Przekładnie łańcuchowe znajdują zastosowanie ( szczególnie przy dużych odległościach osi ) do przenoszenia mocy, jako środki napędu w różnego rodzaju maszynach i urządzeniach przemysłowych
PRZEKŁADNIE ŁAŃCUCHOWE Przekładnie łańcuchowe znajdują zastosowanie ( szczególnie przy dużych odległościach osi ) do przenoszenia mocy, jako środki napędu w różnego rodzaju maszynach i urządzeniach przemysłowych
Wszystko co chcielibyście wiedzieć o badaniach technicznych
 Wszystko co chcielibyście wiedzieć o badaniach technicznych ale Pół żartem, pół serio o naszej rutynie Czasem zdarza się, że pozwalamy wjechać klientowi na stanowisko Być może cierpi on na wadę wzroku
Wszystko co chcielibyście wiedzieć o badaniach technicznych ale Pół żartem, pół serio o naszej rutynie Czasem zdarza się, że pozwalamy wjechać klientowi na stanowisko Być może cierpi on na wadę wzroku
Ogólne zalecenia przy montażu produktów hellride.co
 Ogólne zalecenia przy montażu produktów Niniejsza instrukcja jest jedynie zbiorem wskazówek pomocnych podczas naszych produktów. Mogą wystąpić drobne różnice pomiędzy przedmiotami na zdjęciach a tymi,
Ogólne zalecenia przy montażu produktów Niniejsza instrukcja jest jedynie zbiorem wskazówek pomocnych podczas naszych produktów. Mogą wystąpić drobne różnice pomiędzy przedmiotami na zdjęciach a tymi,
PL B BUP 13/ WUP 01/17
 PL 224581 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224581 (13) B1 (21) Numer zgłoszenia: 406525 (51) Int.Cl. B25J 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 224581 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224581 (13) B1 (21) Numer zgłoszenia: 406525 (51) Int.Cl. B25J 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: