Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie. Ćwiczenie 3 Dobór mikrosilnika prądu stałego do układu pozycjonującego
|
|
|
- Patryk Szczepański
- 7 lat temu
- Przeglądów:
Transkrypt
1 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego
 39 silników prądu")
2 Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego

3 Silniki prądu stałego z przekładniami redukcyjnymi (2009)

4 Mikrosilnik prądu stałego z wirnikiem bezrdzeniowym (Kenjo, Nagamori 1989) 1 - tuleja, 2 - wałek, 3 - obudowa, 4 - magnes, 5 - twornik, 6 - szczotka, 7 - wyprowadzenie, 8 - komutator, 9 - piasta, 10 - łożysko
5 Napęd pozycjonujący z mikrosilnikiem prądu stałego (Wierciak 2000) Sygnał zadanego położenia Układ odejmujący Sygnał różnicowy Wzmacniacz mocy Napięcie sterujące Silnik Mechanizm Sygnał położenia Przetwornik położenia

6 Serwonapęd położeniowy prądu stałego z potencjometrem (Mclennan Servo Supplies Ltd. 2008)

7 Serwonapęd położeniowy prądu stałego z potencjometrem (Mclennan Servo Supplies Ltd. 2008)
8 Napęd pozycjonujący z kompensacją prędkościową (Wierciak 2000) Sygnał predkości Przetwornik prędkości Sygnał zadanego położenia Układ odejmujący Sygnał różnicowy Układ kompensujący Wzmacniacz mocy Napięcie sterujące Silnik Mechanizm Sygnał położenia Przetwornik położenia


9 Serwonapędy (Lenze 2008) Serwosilniki Serwonapęd


10 Handlowe serwonapędy - przykłady (Metronix, Maxon 2008)
11 Dynamiczny model mikrosilnika prądu stałego (Wierciak 2000) Równanie napięć Równanie momentów K T di u Rti L K E dt d i ( J s J red ) KD ( M F sgn( ) M red ) dt i - prąd twornika (A) J r - zredukowany moment bezwładności napędzanych zespołów (kg m 2 ) M F - moment tarcia statycznego J s - moment bezwładności w silniku (N m) wirnika (kg m 2 ) M r - zredukowany moment obciążający (N m) K D - stała tłumienia lepkiego R t - całkowita rezystancja w silniku (N m s) obwodu twornika (Ω) K E - stała napięcia (V s) u - napięcie zasilania (V) K T - stała momentu (N m/a) ω - prędkość kątowa wirnika (rad/s) L - indukcyjność uzwojenia twornika (H) M F - moment tarcia statycznego w silniku (N m)
12 Dwa podstawowe sposoby sterowania silników prądu stałego (Kenjo, Nagamori 1989) a) b) a) sterowanie napięciowe, b) sterowanie prądowe
13 Rzeczywisty przebieg prędkości podczas rozruchu silnika prądu stałego (Owczarek 1984)
14 Idealny przebieg prędkości podczas rozruchu silnika prądu stałego (Owczarek 1984)
15 Zastępcze parametry mikrosilnika prądu stałego (Wierciak 2000) Stała czasowa elektromagnetyczna T Stała czasowa elektromechaniczna J s - masowy moment bezwładności wirnika (kg m 2 ) K E - stała napięcia (V s) K T - stała momentu (N m/a) e T m L R L - indukcyjność uzwojenia twornika (H) R t - całkowita rezystancja obwodu twornika (Ω) t Rt K K E T J s ω ω 0 0,632 ω 0 T m Idealny przebieg zmian prędkości silnika podczas rozruchu ω 0 - ustalona prędkość obrotowa wirnika t
16 Profil prędkości przy pozycjonowaniu na krótkiej drodze (Wierciak 2000) Prędkość ω Hamowanie Przyspieszanie Czas t
17 Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans, Wierciak 2008) Stolik z gniazdami J mech N Δγ mech Silnik napędowy Przekładnia cięgnowa N - liczba gniazd w stoliku T p - długość cyklu pozycjonowania J mech - masowy moment bezwładności stolika
18 Algorytm doboru silnika (Portescap 2003) A. Wyznaczenie przyspieszenia kątowego B. Wyznaczenie momentu napędowego C. Dobór silnika D. Wyznaczenie prądu silnika E. Wyznaczenie temperatury wirnika F. Obliczenie rezystancji wirnika G. Wyznaczenie maksymalnej prędkości silnika H. Wyznaczenie napięcia sterującego
19 Wyznaczenie przyspieszenia kątowego (Portescap 2003) ω m Prędkość ω ε a -ε a a T 2 p 2 1 T 4 2 p i a - i a Prąd i T p Czas t Czas t T p - długość cyklu pozycjonowania ε a - przyspieszenie kątowe wirnika Δγ - wymagane przemieszczenie kątowe wirnika ω m - maksymalna prędkość wirnika
20 Zredukowany kąt obrotu (Wierciak 2009) Δ Δ i mech p i p - przełożenie przekładni Δγ mech - wymagane przemieszczenie kątowe mechanizmu Δγ - wymagane przemieszczenie kątowe wirnika
21 Wyznaczenie momentu napędowego (Portescap 2003) M a a J red J s J s - masowy moment bezwładności wirnika J red - zredukowany masowy moment bezwładności obciążenia M a - potrzebny moment silnika korzystne założenie J red J s
22 Zredukowane obciążenie inercyjne (Oleksiuk 1989) J red J mech 2 p ip J mech - masowy moment bezwładności napędzanych elementów J red - zredukowany masowy moment bezwładności obciążenia i p - przełożenie przekładni - sprawność przekładni η p w ćwiczeniu: i p 2, 3, p 0,9 4

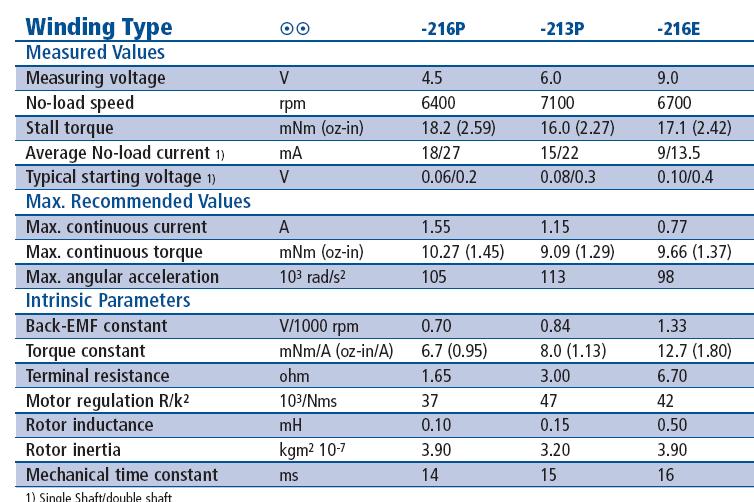
23 Dobór silnika (Portescap 2005)
24 Wyznaczenie prądu silnika (Portescap 2003) i a M K a T K T M a i a - stała momentu silnika - wymagany moment silnika - prąd silnika
25 Wyznaczenie maksymalnej prędkości silnika (Portescap 2003) 1 T m 2 p a T p - długość cyklu pozycjonowania ε a - przyspieszenie kątowe wirnika ω m - maksymalna prędkość kątowa wirnika
26 Wyznaczenie ustalonej temperatury wirnika (API Portescap 2000) Temperatura wirnika 2 R0ia Rwot1 T0 Tw 2 1CuR0ia Całkowity opór cieplny R wot R ws R so Cu R wot T ot i a - prąd pobierany przez silnik [A] R 0 - rezystancja obwodu twornika w temp. T 0 [Ω] R ws - opór cieplny między wirnikiem i stojanem [K/W] R so - opór cieplny między stojanem i otoczeniem [K/W] T 0 - temperatura odniesienia [K] T w - temperatura wirnika [K] T ot - temperatura otoczenia [K] α Cu - temperaturowy wsp. rezystywności miedzi [1]
27 Wyznaczenie ustalonej rezystancji wirnika (API Portescap 2000) R t R 0 1 T w T 0 Cu R t - chwilowa rezystancja obwodu twornika [Ω] R 0 - rezystancja obwodu twornika w temp. T 0 [Ω] T 0 - temperatura odniesienia [K] T w - temperatura wirnika [K] T ot - temperatura otoczenia [K] α Cu - temperaturowy wsp. rezystywności miedzi [1]
28 Wyznaczenie napięcia sterującego (Portescap 2003) U min R i t a K E m K E i a R t - stała napięcia silnika - prąd silnika - całkowita rezystancja obwodu twornika U min - minimalne napięcie sterujące ω m - maksymalna prędkość wirnika
29 Profil prędkości przy pozycjonowaniu na długiej drodze (Wierciak 2000) Prędkość ω Praca z ustaloną prędkością Przyspieszanie Hamowanie Czas t
30 Pozycjonowanie z użyciem trapezowego profilu prędkości (Wierciak 2000) Prędkość ω ω m i a i u - maksymalny prąd silnika (A) - statyczny prąd obciążonego silnika (A) T p - długość cyklu pozycjonowania (s) ε a - przyspieszenie kątowe wirnika (rad/s 2 ) ω m - maksymalna prędkość wirnika (rad/s) ε p -ε p T p Czas t Prąd i i a i u - i a Czas t
31 Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans, Wierciak 2008) Stolik z gniazdami J mech N Δγ mech Silnik napędowy Przekładnia cięgnowa N - liczba gniazd w stoliku T p - długość cyklu pozycjonowania J mech - masowy moment bezwładności stolika
Zasady doboru mikrosilników prądu stałego
 Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Ćwiczenie 2 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy
Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego
 Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Ćwiczenie 1 Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych
 Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych Przykłady napędów bezpośrednich - twardy
Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych Przykłady napędów bezpośrednich - twardy
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym
 Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Identyfikacja cieplnych modeli elektrycznych układów napędowych
 Jakub Wierciak Identyfikacja cieplnych modeli elektrycznych układów napędowych Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Jakub Wierciak Identyfikacja cieplnych modeli elektrycznych układów napędowych Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Mikrosilniki prądu stałego cz. 1
 Jakub Wierciak Mikrosilniki cz. 1 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Struktura elektrycznego układu napędowego (Wierciak
Jakub Wierciak Mikrosilniki cz. 1 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Struktura elektrycznego układu napędowego (Wierciak
Ćwiczenie 1. Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych
 - projektowanie Ćwiczenie 1 Dobór mikrosilnika prądu stałego do napędu bezpośredniego Instrukcja Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu
- projektowanie Ćwiczenie 1 Dobór mikrosilnika prądu stałego do napędu bezpośredniego Instrukcja Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu
Mikrosilniki prądu stałego cz. 1
 Jakub Wierciak Mikrosilniki cz. 1 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Zasady działania siłowników elektrycznych (Heimann,
Jakub Wierciak Mikrosilniki cz. 1 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Zasady działania siłowników elektrycznych (Heimann,
Modelowanie układu napędu taśmy przenośnego magnetofonu kasetowego w środowisku MATLAB/SIMULINK
 Ćwiczenie 2 Modelowanie układu napędu taśmy przenośnego magnetofonu kasetowego w środowisku MATLAB/SIMULINK Instrukcja laboratoryjna Warszawa 2013 Modelowanie układu napędu taśmy przenośnego magnetofonu
Ćwiczenie 2 Modelowanie układu napędu taśmy przenośnego magnetofonu kasetowego w środowisku MATLAB/SIMULINK Instrukcja laboratoryjna Warszawa 2013 Modelowanie układu napędu taśmy przenośnego magnetofonu
Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie
 - projektowanie Ćwiczenie 2 Instrukcja Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Warszawa 2012 2 Ćwiczenie 2 2. Dobór mikrosilnika
- projektowanie Ćwiczenie 2 Instrukcja Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Warszawa 2012 2 Ćwiczenie 2 2. Dobór mikrosilnika
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Ćwiczenie: "Silnik prądu stałego"
 Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Elektromagnesy prądu stałego cz. 2
 Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
Ćwiczenie 3. Modelowanie układu wykonawczego w środowisku MATLAB / SIMULINK
 - laboratorium Ćwiczenie 3 Instrukcja laboratoryjna Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Warszawa 013 Ćwiczenie 3 3.
- laboratorium Ćwiczenie 3 Instrukcja laboratoryjna Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Warszawa 013 Ćwiczenie 3 3.
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Elektromagnesy prądu stałego cz. 2
 Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Ćwiczenie 1b. Silnik prądu stałego jako element wykonawczy Modelowanie i symulacja napędu CZUJNIKI POMIAROWE I ELEMENTY WYKONAWCZE
 Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
LABORATORIUM PODSTAW ELEKTROTECHNIKI Badanie silnika bocznikowego prądu stałego
 Ćwiczenie 3 Wydział Geoinżynierii, Górnictwa i Geologii LABORATORIUM PODSTAW ELEKTROTECHNIKI Badanie silnika bocznikowego prądu stałego Opracował: Grzegorz Wiśniewski Zagadnienia do przygotowania Urządzenia
Ćwiczenie 3 Wydział Geoinżynierii, Górnictwa i Geologii LABORATORIUM PODSTAW ELEKTROTECHNIKI Badanie silnika bocznikowego prądu stałego Opracował: Grzegorz Wiśniewski Zagadnienia do przygotowania Urządzenia
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Silniki skokowe - cz. 1: budowa i zasada działania
 Jakub Wierciak Silniki skokowe - cz. 1: budowa i zasada działania Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Zasady działania
Jakub Wierciak Silniki skokowe - cz. 1: budowa i zasada działania Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Zasady działania
Napędy urządzeń mechatronicznych
 Jakub Wierciak Napędy urządzeń Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Ewolucja systemów technicznych (Gawrysiak 1997)
Jakub Wierciak Napędy urządzeń Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Ewolucja systemów technicznych (Gawrysiak 1997)
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wprowadzenie do mechatroniki
 Człony wykonawcze Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Urządzenia nastawcze aktuatory elektro-mechaniczne Urządzenia nastawcze - wykorzystywane do wykonywania ruchów lub
Człony wykonawcze Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Urządzenia nastawcze aktuatory elektro-mechaniczne Urządzenia nastawcze - wykorzystywane do wykonywania ruchów lub
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Modelowanie silników skokowych
 Modelowanie silników skokowych Silnik skokowy literatura nt. opisu formalnego Pochanke A.: Modele obwodowo-polowe pośrednio sprzężone silników bezzestykowych z uwarunkowaniami zasilania. OWPW, Warszawa,
Modelowanie silników skokowych Silnik skokowy literatura nt. opisu formalnego Pochanke A.: Modele obwodowo-polowe pośrednio sprzężone silników bezzestykowych z uwarunkowaniami zasilania. OWPW, Warszawa,
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Wykład 1. Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi.
 Serwonapędy w automatyce i robotyce Wykład 1 iotr Sauer Katedra Sterowania i Inżynierii Systemów Wprowadzenie Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi. roces pozycjonowania osi - sposób
Serwonapędy w automatyce i robotyce Wykład 1 iotr Sauer Katedra Sterowania i Inżynierii Systemów Wprowadzenie Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi. roces pozycjonowania osi - sposób
LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH
 -CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
-CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
Napędy urządzeń mechatronicznych
 1. Na rysunku przedstawiono schemat blokowy układu wykonawczego z napędem elektrycznym. W poszczególne bloki schematu wpisać nazwy jego elementów oraz wskazanych sygnałów. Napędy urządzeń mechatronicznych
1. Na rysunku przedstawiono schemat blokowy układu wykonawczego z napędem elektrycznym. W poszczególne bloki schematu wpisać nazwy jego elementów oraz wskazanych sygnałów. Napędy urządzeń mechatronicznych
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 4 Dobór elektromagnesu do układu wykonawczego
 Napędy urządzeń mechatronicznych - projektowanie Dobór elektromagnesu do układu wykonawczego Rozdzielacz detali napędzany elektromagnesami (Wierciak 2009) Klasyfikacja elektromagnesów ze względu na realizowaną
Napędy urządzeń mechatronicznych - projektowanie Dobór elektromagnesu do układu wykonawczego Rozdzielacz detali napędzany elektromagnesami (Wierciak 2009) Klasyfikacja elektromagnesów ze względu na realizowaną
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE
 ĆWICZENIE 5) BADANIE REGULATORA PI W UKŁADZIE STEROWANIA PRĘDKOŚCIĄ OBROTOWĄ SILNIKA PRĄDU STAŁEGO PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE ZAPOZNANIE SIĘ Z TREŚCIĄ INSTRUKCJI CEL ĆWICZENIA:
ĆWICZENIE 5) BADANIE REGULATORA PI W UKŁADZIE STEROWANIA PRĘDKOŚCIĄ OBROTOWĄ SILNIKA PRĄDU STAŁEGO PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE ZAPOZNANIE SIĘ Z TREŚCIĄ INSTRUKCJI CEL ĆWICZENIA:
Inteligentnych Systemów Sterowania
 Laboratorium Inteligentnych Systemów Sterowania Mariusz Nowak Instytut Informatyki Politechnika Poznańska ver. 200.04-0 Poznań, 2009-200 Spis treści. Układ regulacji automatycznej z regulatorami klasycznymi
Laboratorium Inteligentnych Systemów Sterowania Mariusz Nowak Instytut Informatyki Politechnika Poznańska ver. 200.04-0 Poznań, 2009-200 Spis treści. Układ regulacji automatycznej z regulatorami klasycznymi
Ćwiczenie EA1 Silniki wykonawcze prądu stałego
 Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA1 Silniki wykonawcze prądu stałego Program ćwiczenia: A Silnik wykonawczy elektromagnetyczny 1. Zapoznanie się
Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA1 Silniki wykonawcze prądu stałego Program ćwiczenia: A Silnik wykonawczy elektromagnetyczny 1. Zapoznanie się
Silniki skokowe - cz. 2: rodzaje pracy i charakterystyki
 Jakub Wierciak Silniki skokowe - cz. 2: rodzaje pracy i charakterystyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rodzaje
Jakub Wierciak Silniki skokowe - cz. 2: rodzaje pracy i charakterystyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rodzaje
9. Napęd elektryczny test
 9. Napęd elektryczny test 9.1 oment silnika prądu stałego opisany jest związkiem: a. = ωψ b. = IΨ c. = ωi d. = ω IΨ 9.2. oment obciążenia mechanicznego silnika o charakterze czynnym: a. działa zawsze przeciwnie
9. Napęd elektryczny test 9.1 oment silnika prądu stałego opisany jest związkiem: a. = ωψ b. = IΨ c. = ωi d. = ω IΨ 9.2. oment obciążenia mechanicznego silnika o charakterze czynnym: a. działa zawsze przeciwnie
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Silniki serwo EMMS-AS
 Główne cechy Wszystko z jednego źródła Silniki EMMS-AS 4 Silnik serwo trwale wzbudzony, elektrodynamiczny, bezszczotkowy Wybór dwóch typów enkodera: Cyfrowy bezwzględny enkoder jednoobrotowy (standard)
Główne cechy Wszystko z jednego źródła Silniki EMMS-AS 4 Silnik serwo trwale wzbudzony, elektrodynamiczny, bezszczotkowy Wybór dwóch typów enkodera: Cyfrowy bezwzględny enkoder jednoobrotowy (standard)
Napędy urządzeń mechatronicznych
 Jakub Wierciak Napędy urządzeń Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Ewolucja systemów technicznych (Gawrysiak 1997)
Jakub Wierciak Napędy urządzeń Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Ewolucja systemów technicznych (Gawrysiak 1997)
Cel ćwiczenia. Przetwornik elektromagnetyczny. Silniki krokowe. Układ sterowania napędu mechatronicznego z silnikiem krokowym.
 KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
Dynamika mechanizmów
 Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Badanie napędu z silnikiem bezszczotkowym prądu stałego
 Badanie napędu z silnikiem bezszczotkowym prądu stałego Instrukcja do ćwiczenia Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sposobem sterowania 3- pasmowego silnika bezszczotkowego
Badanie napędu z silnikiem bezszczotkowym prądu stałego Instrukcja do ćwiczenia Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sposobem sterowania 3- pasmowego silnika bezszczotkowego
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną
 Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
Konstrukcje Maszyn Elektrycznych
 Konstrukcje Maszyn Elektrycznych Konspekt wykładu: dr inż. Krzysztof Bieńkowski GpK p.16 tel. 761 K.Bienkowski@ime.pw.edu.pl www.ime.pw.edu.pl/zme/ 1. Zakres wykładu, literatura. 2. Parametry konstrukcyjne
Konstrukcje Maszyn Elektrycznych Konspekt wykładu: dr inż. Krzysztof Bieńkowski GpK p.16 tel. 761 K.Bienkowski@ime.pw.edu.pl www.ime.pw.edu.pl/zme/ 1. Zakres wykładu, literatura. 2. Parametry konstrukcyjne
NAPĘDY MASZYN TECHNOLOGICZNYCH
 WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA Instytut Technologii Mechanicznej ul. Piotrowo 3, 60-965 Poznań, tel. +48 61 665 2203, fax +48 61 665 2200 e-mail: office_mt@put.poznan.pl, www.put.poznan.pl MATERIAŁY
WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA Instytut Technologii Mechanicznej ul. Piotrowo 3, 60-965 Poznań, tel. +48 61 665 2203, fax +48 61 665 2200 e-mail: office_mt@put.poznan.pl, www.put.poznan.pl MATERIAŁY
Obliczenia polowe silnika przełączalnego reluktancyjnego (SRM) w celu jego optymalizacji
 w celu jego optymalizacji") Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Silniki prądu stałego
 Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
2. Dane znamionowe badanego silnika.
 Wydział: EAIiE kierunek: AiR, rok II Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Laboratorium z Elektrotechniki z Napędami Elektrycznymi Grupa laboratoryjna: A Czwartek 13:15 Paweł Górka
Wydział: EAIiE kierunek: AiR, rok II Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Laboratorium z Elektrotechniki z Napędami Elektrycznymi Grupa laboratoryjna: A Czwartek 13:15 Paweł Górka
Dynamika układów mechanicznych. dr hab. inż. Krzysztof Patan
 Dynamika układów mechanicznych dr hab. inż. Krzysztof Patan Wprowadzenie Modele układów mechanicznych opisują ruch ciał sztywnych obserwowany względem przyjętego układu odniesienia Ruch ciała w przestrzeni
Dynamika układów mechanicznych dr hab. inż. Krzysztof Patan Wprowadzenie Modele układów mechanicznych opisują ruch ciał sztywnych obserwowany względem przyjętego układu odniesienia Ruch ciała w przestrzeni
Ćwiczenie 3. Dobór silnika skokowego do pracy w obszarze rozruchowym
 - projektowanie Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym Instrukcja Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu
- projektowanie Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym Instrukcja Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu
Trójfazowe silniki indukcyjne. 1. Wyznaczenie charakterystyk rozruchowych prądu stojana i momentu:
 A3 Trójfazowe silniki indukcyjne Program ćwiczenia. I. Silnik pierścieniowy 1. Wyznaczenie charakterystyk rozruchowych prądu stojana i momentu: a - bez oporów dodatkowych w obwodzie wirnika, b - z oporami
A3 Trójfazowe silniki indukcyjne Program ćwiczenia. I. Silnik pierścieniowy 1. Wyznaczenie charakterystyk rozruchowych prądu stojana i momentu: a - bez oporów dodatkowych w obwodzie wirnika, b - z oporami
bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe, trzymadła szczotkowe.
, bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe, trzymadła szczotkowe.") Silnik prądu stałego - budowa Stojan - najczęściej jest magneśnicą wytwarza pole magnetyczne jarzmo (2), bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe,
Silnik prądu stałego - budowa Stojan - najczęściej jest magneśnicą wytwarza pole magnetyczne jarzmo (2), bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe,
Rozrusznik. Elektrotechnika w środkach transportu 85
 i Elektrotechnika w środkach transportu 85 Elektrotechnika w środkach transportu 86 Silnik spalinowy Elektrotechnika w środkach transportu 87 Silnik spalinowy Elektrotechnika w środkach transportu 88 Proces
i Elektrotechnika w środkach transportu 85 Elektrotechnika w środkach transportu 86 Silnik spalinowy Elektrotechnika w środkach transportu 87 Silnik spalinowy Elektrotechnika w środkach transportu 88 Proces
Nr katalogowy Moc Znamionowy moment siły Prędkość znamionowa
 ASTOR GE INTELLIGENT PLATFORMS - SERWONAPĘDY VERSAMOTION 6.3 SILNIKI Silniki są wykonywane na moce od 100 W do 3 kw i moment siły od 0,32 Nm do 14,32 Nm dla pracy ciągłej i od 0,96 Nm do 42,96 Nm dla pracy
ASTOR GE INTELLIGENT PLATFORMS - SERWONAPĘDY VERSAMOTION 6.3 SILNIKI Silniki są wykonywane na moce od 100 W do 3 kw i moment siły od 0,32 Nm do 14,32 Nm dla pracy ciągłej i od 0,96 Nm do 42,96 Nm dla pracy
Maszyny Elektryczne i Transformatory sem. III zimowy 2012/2013
 Kolokwium główne Wariant A Maszyny Elektryczne i Transformatory sem. III zimowy 2012/2013 Maszyny Prądu Stałego Prądnica bocznikowa prądu stałego ma następujące dane znamionowe: P 7,5 kw U 230 V n 23,7
Kolokwium główne Wariant A Maszyny Elektryczne i Transformatory sem. III zimowy 2012/2013 Maszyny Prądu Stałego Prądnica bocznikowa prądu stałego ma następujące dane znamionowe: P 7,5 kw U 230 V n 23,7
Silniki skokowe EMMS-ST
 Główne cechy Wszystko z jednego źródła 4 2-fazowy silnik hybrydowy Opcjonalnie zintegrowany enkoder dla pracy typu Servo Lite (praca w pętli zamkniętej) Sinusoidalny prąd sterowania Opcjonalny hamulec
Główne cechy Wszystko z jednego źródła 4 2-fazowy silnik hybrydowy Opcjonalnie zintegrowany enkoder dla pracy typu Servo Lite (praca w pętli zamkniętej) Sinusoidalny prąd sterowania Opcjonalny hamulec
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: MASZYNY I NAPĘDY ELEKTRYCZNE. Kod przedmiotu: Emn 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność:
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: MASZYNY I NAPĘDY ELEKTRYCZNE. Kod przedmiotu: Emn 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność:
UKŁAD AUTOMATYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU STAŁEGO KONFIGUROWANY GRAFICZNIE
 UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Laboratorium z Elektrotechniki z Napędami Elektrycznymi
 Wydział: EAIiE kierunek: AiR, rok II Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Laboratorium z Elektrotechniki z Napędami Elektrycznymi Grupa laboratoryjna: A Czwartek 13:15 Paweł Górka
Wydział: EAIiE kierunek: AiR, rok II Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Laboratorium z Elektrotechniki z Napędami Elektrycznymi Grupa laboratoryjna: A Czwartek 13:15 Paweł Górka
Badanie silnika indukcyjnego jednofazowego i transformatora
 Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych Ciężkich PW Laboratorium Elektrotechniki i Elektroniki Ćwiczenie M3 - protokół Badanie silnika indukcyjnego jednofazowego i transformatora Data
Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych Ciężkich PW Laboratorium Elektrotechniki i Elektroniki Ćwiczenie M3 - protokół Badanie silnika indukcyjnego jednofazowego i transformatora Data
Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE.
 1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
SILNIK KROKOWY. w ploterach i małych obrabiarkach CNC.
 SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
INSTRUKCJA I MATERIAŁY POMOCNICZE
 Wiesław Jażdżyński INSTRUKCJA I MATERIAŁY POMOCNICZE Ćwiczenie Przedmiot: Podzespoły Elektryczne Pojazdów Samochodowych IM_1-3 Temat: Maszyna indukcyjna modelowanie i analiza symulacyjna Zakres ćwiczenia:
Wiesław Jażdżyński INSTRUKCJA I MATERIAŁY POMOCNICZE Ćwiczenie Przedmiot: Podzespoły Elektryczne Pojazdów Samochodowych IM_1-3 Temat: Maszyna indukcyjna modelowanie i analiza symulacyjna Zakres ćwiczenia:
Silniki indukcyjne. Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe.
 Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
Wyznaczanie strat w uzwojeniu bezrdzeniowych maszyn elektrycznych
 Wyznaczanie strat w uzwojeniu bezrdzeniowych maszyn elektrycznych Zakres ćwiczenia 1) Pomiar napięć indukowanych. 2) Pomiar ustalonej temperatury czół zezwojów. 3) Badania obciążeniowe. Badania należy
Wyznaczanie strat w uzwojeniu bezrdzeniowych maszyn elektrycznych Zakres ćwiczenia 1) Pomiar napięć indukowanych. 2) Pomiar ustalonej temperatury czół zezwojów. 3) Badania obciążeniowe. Badania należy
Silniki skokowe EMMS-ST
 q/w Podstawowy program produkcyjny Festo Obejmuje 80% Twoich zadań automatyzacji Na całym świecie: Zawsze na stanie Znakomity: Jakość Festo w atrakcyjnej cenie Prostota: Zredukowana złożoność zamawiania
q/w Podstawowy program produkcyjny Festo Obejmuje 80% Twoich zadań automatyzacji Na całym świecie: Zawsze na stanie Znakomity: Jakość Festo w atrakcyjnej cenie Prostota: Zredukowana złożoność zamawiania
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego
 Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego.
 Kwalifikacyjnego kursu zawodowego.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Ćwiczenie EA5 Silnik 2-fazowy indukcyjny wykonawczy
 Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA5 Silnik 2-fazowy indukcyjny wykonawczy 1. Zapoznanie się z konstrukcją, zasadą działania i układami sterowania
Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA5 Silnik 2-fazowy indukcyjny wykonawczy 1. Zapoznanie się z konstrukcją, zasadą działania i układami sterowania
MATERIAŁY I KONSTRUKCJE INTELIGENTNE Laboratorium. Ćwiczenie 2
 MATERIAŁY I KONSTRUKCJE INTELIGENTNE Laboratorium Ćwiczenie Hamulec magnetoreologiczny Katedra Automatyzacji Procesów Wydział Inżynierii Mechanicznej i Robotyki Akademia Górniczo-Hutnicza Ćwiczenie Cele:
MATERIAŁY I KONSTRUKCJE INTELIGENTNE Laboratorium Ćwiczenie Hamulec magnetoreologiczny Katedra Automatyzacji Procesów Wydział Inżynierii Mechanicznej i Robotyki Akademia Górniczo-Hutnicza Ćwiczenie Cele:
Silnik indukcyjny - historia
 Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Wpływ tarcia na serwomechanizmy
 Wpływ tarcia na serwomechanizmy Zakłócenia oddziałujące na serwomechanizm Siły potencjalne/grawitacji, Tarcie, Zmienny moment bezwładności, Zmienny moment obciążenia Tarcie Zjawisko to znane jest od bardzo
Wpływ tarcia na serwomechanizmy Zakłócenia oddziałujące na serwomechanizm Siły potencjalne/grawitacji, Tarcie, Zmienny moment bezwładności, Zmienny moment obciążenia Tarcie Zjawisko to znane jest od bardzo
Symulacja pracy silnika prądu stałego
 KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Symulacja pracy silnika prądu stałego Opracował: Dr inż. Roland Pawliczek Opole 016
KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Symulacja pracy silnika prądu stałego Opracował: Dr inż. Roland Pawliczek Opole 016
Egzamin 1 Strona 1. Egzamin - AR egz Zad 1. Rozwiązanie: Zad. 2. Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same
 Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Ćwiczenie 1. Modelowanie mikrosilnika prądu stałego w środowisku AMIL
 - laboratorium Ćwiczenie 1 Modelowanie mikrosilnika prądu stałego w środowisku Instrukcja laboratoryjna Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
- laboratorium Ćwiczenie 1 Modelowanie mikrosilnika prądu stałego w środowisku Instrukcja laboratoryjna Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA
 SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
Wyznaczanie momentu bezwładności wirników maszyn elektrycznych
 Wyznaczanie momentu bezwładności wirników maszyn elektrycznych Zakres ćwiczenia 1) Pomiar momentu bezwładności metodą drgań skrętnych Należy wyznaczyć moment bezwładności wirnika z klatką aluminiową; Wybrane
Wyznaczanie momentu bezwładności wirników maszyn elektrycznych Zakres ćwiczenia 1) Pomiar momentu bezwładności metodą drgań skrętnych Należy wyznaczyć moment bezwładności wirnika z klatką aluminiową; Wybrane
MiAcz3. Elektryczne maszynowe napędy wykonawcze
 MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO
 TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
Silniki prądu stałego. Wiadomości ogólne
 Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Ćwiczenie EA11. Bezszczotkowy silnik prądu stałego
 Ćwiczenie EA11 Bezszczotkowy silnik prądu stałego Program ćwiczenia: 1. Wyznaczenie charakterystyki regulacyjnej (sterowania) silnika n = n(u AC ), w stanie biegu jałowego silnika 2. Wyznaczenie charakterystyk
Ćwiczenie EA11 Bezszczotkowy silnik prądu stałego Program ćwiczenia: 1. Wyznaczenie charakterystyki regulacyjnej (sterowania) silnika n = n(u AC ), w stanie biegu jałowego silnika 2. Wyznaczenie charakterystyk
Sterowanie układem zawieszenia magnetycznego
 Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny.
 Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny. 1. Silnik komutatorowy jednofazowy szeregowy (silniki uniwersalne). silniki komutatorowe jednofazowe szeregowe maja budowę
Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny. 1. Silnik komutatorowy jednofazowy szeregowy (silniki uniwersalne). silniki komutatorowe jednofazowe szeregowe maja budowę
Ćwiczenie 1. Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym.
 Ćwiczenie 1 Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym. Środowisko symulacyjne Symulacja układu napędowego z silnikiem DC wykonana zostanie w oparciu o środowisko symulacyjne
Ćwiczenie 1 Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym. Środowisko symulacyjne Symulacja układu napędowego z silnikiem DC wykonana zostanie w oparciu o środowisko symulacyjne
KARTA PRZEDMIOTU Rok akademicki: 2010/11
 KARTA PRZEDMIOTU Rok akademicki: 2010/11 Nazwa przedmiotu: Maszyny elektryczne Rodzaj i tryb studiów: niestacjonarne I stopnia Kierunek: Maszyny elektryczne Specjalność: Automatyka i energoelektryka w
KARTA PRZEDMIOTU Rok akademicki: 2010/11 Nazwa przedmiotu: Maszyny elektryczne Rodzaj i tryb studiów: niestacjonarne I stopnia Kierunek: Maszyny elektryczne Specjalność: Automatyka i energoelektryka w
STUDIA I STOPNIA NIESTACJONARNE ELEKTROTECHNIKA
 PRZEDMIOT: ROK: 3 SEMESTR: 6 (letni) RODZAJ ZAJĘĆ I LICZBA GODZIN: LICZBA PUNKTÓW ECTS: RODZAJ PRZEDMIOTU: STUDIA I STOPNIA NIESTACJONARNE ELEKTROTECHNIKA Maszyny Elektryczn Wykład 30 Ćwiczenia Laboratorium
PRZEDMIOT: ROK: 3 SEMESTR: 6 (letni) RODZAJ ZAJĘĆ I LICZBA GODZIN: LICZBA PUNKTÓW ECTS: RODZAJ PRZEDMIOTU: STUDIA I STOPNIA NIESTACJONARNE ELEKTROTECHNIKA Maszyny Elektryczn Wykład 30 Ćwiczenia Laboratorium
DOSTAWA WYPOSAŻENIA HAMOWNI MASZYN ELEKTRYCZNYCH DLA LABORATORIUM LINTE^2 OPIS PRZEDMIOTU ZAMÓWIENIA
 ZAŁĄCZNIK Z1.A do Specyfikacji Istotnych Warunków Zamówienia, postępowanie nr ZP/220/014/D/15 DOSTAWA WYPOSAŻENIA HAMOWNI MASZYN ELEKTRYCZNYCH DLA LABORATORIUM LINTE^2 OPIS PRZEDMIOTU ZAMÓWIENIA CZĘŚĆ
ZAŁĄCZNIK Z1.A do Specyfikacji Istotnych Warunków Zamówienia, postępowanie nr ZP/220/014/D/15 DOSTAWA WYPOSAŻENIA HAMOWNI MASZYN ELEKTRYCZNYCH DLA LABORATORIUM LINTE^2 OPIS PRZEDMIOTU ZAMÓWIENIA CZĘŚĆ
Laboratorium Maszyny CNC. Nr 3
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
Ćwiczenie: "Silnik indukcyjny"
 Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Wykaz ważniejszych oznaczeń Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13
 Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i
 SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1. Zbigniew Krzemiński, MMB Drives sp. z o.o.
 Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy