MECHANIKI. Laboratorium. Konstrukcje od 1 do 35
|
|
|
- Joanna Woźniak
- 7 lat temu
- Przeglądów:
Transkrypt




1 Laboratorium MECHANIKI Konstrukcje od do 5 Motaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek Złożenie belki z modułem kątowym Zbuduj kwadrat za pomocą belek Montaż czterech belek Zbuduj równoległościan Most z kilku elementów Koła zębate z drążkiem Zbuduj dźwignię. typu obcęgi Zbuduj dźwignię. typu dziadek do orzechów Zbuduj dźwignię. typu szczypce Skonstruuj punkt podparcia dźwigni i obciążnik Skonstruuj i wypróbuj dźwignię o równowadze trwałej Skonstruuj i wypróbuj dźwignię o równowadze obojętnej Skonstruuj i wypróbuj dźwignię o równowadze chwiejnej Skonstruuj wagę Skonstruuj huśtawkę i wypróbuj Skonstruuj stanowisko do prób odwróconej rotacji Skonstruuj model do eksperymentu z rotacją bezpośrednią Skonstruuj model do eksperymentu z ruchem przemiennym Skonstruuj napęd pionowy Skonstruuj napęd pionowopoziomy Skonstruuj przekładnię zębatą Przekładnia ślimakowa do podnoszenia Reduktor ślimakowy Złącze Cardana Użyj modułu napędowego w celu wywołania kontrrotacji Użyj modułu napędowego, aby wywołać obroty w tym samym kierunku Połącz przekładnię z koszem satelitów Złóż rower stacjonarny Złóż ruchomą drabinkę do siłowni Zbuduj katapultę UWAGA! Tylko dla dzieci w wieku 8 lat i powyżej. Instrukcje dla rodziców zawarte są w zestawie i należy ich przestrzegać. Należy przeczytać instrukcję i zachować ją do wglądu. Producent: Clementoni S.p.A. Zona Industriale Fontenoce, s.n.c. 609 Recanati (MC) Italy Tel.: Clementoni Polska Sp. z o.o. ul. Budowlanych 7, 8098 Gdańsk,Polska poland@clementoni.com







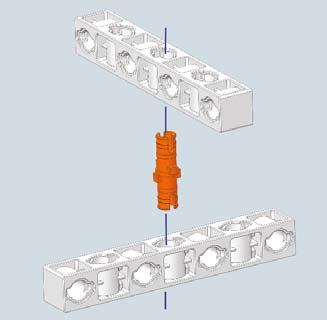
2 ZADANIA Zanim zaczniecie cokolwiek konstruować, przypatrzcie się dobrze, jak zbudowane są elementy zestawu! Jeśli napotkacie na trudności, poproście o pomoc osobę dorosłą. OSTRZEŻENIE! Aby poprawnie odczepić dany element od stelaża, należy go okręcić wokół własnej osi, a nie odrywać. Przy łączeniu drążków z różnymi elementami takimi jak pierścienie, koła zębate itp. sami możecie regulować większą lub mniejszą wytrzymałość i szczelność poprzez zmianę pozycji wejściowej drążka do otworu danego elementu. UWAGA! W poszczególnych fazach montażu wskażemy Ci za pomocą różnych ikon, kiedy obrócić model, kiedy zacisnąć elementy, kiedy użyć belki ze sworzniami, a kiedy belki z gwoździami. Legenda: 0 Oznacza: obrócić model Oznacza: części zostały zaciśnięte Motaż dwóch belek Belka ze sworzniami Belka z gwoździami Montaż belek z zastosowaniem dwóch gwoździ Jeśli użyjemy dwóch gwoździ, efekt będzie bardzo trwały! Złożone belki Łączenie belek Złożone belki X Złożone belki





3 Montaż trzech belek X 5 Prostopadłe złożenie belek Złożenie belki Złożenie belki 6 Złożenie belki z modułem kątowym Złożenie belki



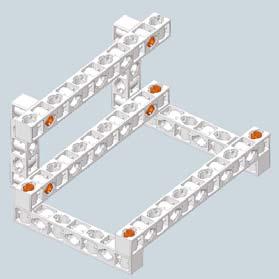
4 7 Zbuduj kwadrat za pomocą belek 8 Montaż czterech belek :




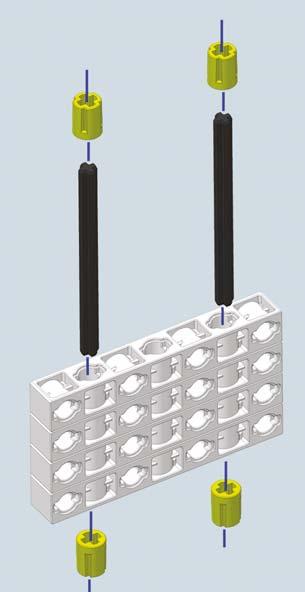
5 9 Zbuduj równoległościan X X8 Faza pośrednia X8 Gotowy model 5






6 0 Most z kilku elementów Gotowy model Koła zębate z drążkiem 6 6 Gotowy model Zbuduj dźwignię. typu obcęgi X8 6 :





7 PUNKT PODPARCIA leży między OPOREM a SIŁĄ. : : Zbuduj dźwignię. typu dziadek do orzechów OPÓR znajduje się między SIŁĄ a PUNKTEM PODPARCIA : 7



8 Zbuduj dźwignię. typu szczypce X SIŁA znajduje się między OPOREM a PUNKTEM PODPARCIA. 8 :


9 Informacje naukowe: zysk mechaniczny dźwigni Dźwignia jest maszyną prostą skonstruowaną przez człowieka po to, by mógł wykonać pracę, redukując przyłożoną siłę. Na drążek działają dwie siły: SIŁA przyłożona i OPÓR. Tak więc używając dźwigni, mamy do czynienia z ZYSKIEM MECHANICZNYM, który można wyliczyć, biorąc pod uwagę również długość ramion SIŁY i OPORU. W dźwigni długość ramion odpowiada odległościom od punktu podparcia. br bp R P Legenda: bp br P R = ramię SIŁY = ramię OPORU = SIŁA przyłożona = siła OPORU EJE WARUNKI RÓWNOWAGI x = x ZYSK MECHANICZNY G = R / br R bp P P SKONSTRUUJ I WYPRÓBUJ DŹWIGNIE 5 Skonstruuj punkt podparcia dźwigni i obciążnik X X7 9


 z drugiej strony, uważając na wywierany nacisk.")

10 MONTOWANIE OBCIĄŻNIKA Gotowy obciążnik W zadaniach nr 90 przesuwaj punkt podparcia i sprawdzaj, naciskając ręką na ramię SIŁY, jakie różnice wystąpią między dźwigniami. 6 Skonstruuj i wypróbuj dźwignię o równowadze trwałej Znajdź równowagę w urządzeniu tego rodzaju: umieść obciążnik (OPÓR) z jednej strony dźwigni i naciśnij ręką (SIŁA) z drugiej strony, uważając na wywierany nacisk. SIŁA PUNKT PODPARCIA OPÓR Zwróć uwagę na pozycję punktu podparcia! Ramię SIŁY jest dłuższe SIŁA jest mniejsza niż OPÓR. EKSPERYMENTUJ! Nota: umieść na drążku punktu podparcia pierścień uszczelniający dźwigni, jak to pokazano na rysunku. : 0

 z jednej strony dźwigni i naciśnij ręką (SIŁA) z drugiej strony, uważając na")
11 7 Skonstruuj i wypróbuj dźwignię o równowadze obojętnej Znajdź równowagę w urządzeniu tego rodzaju: umieść obciążnik (OPÓR) z jednej strony dźwigni i naciśnij ręką (SIŁA) z drugiej strony, uważając na wywierany nacisk. PUNKT PODPARCIA SIŁA Zwróć uwagę na pozycję punktu podparcia! Ramiona są tej samej długości SIŁA jest taka sama jak OPÓR. EKPERYMENTUJ! OPÓR Nota: umieść na drążku punktu podparcia pierścień uszczelniający dźwigni, jak to pokazano na rysunku. Skonstruuj i wypróbuj dźwignię o równowadze chwiejnej Znajdź równowagę w urządzeniu tego rodzaju: umieść obciążnik (OPÓR) z jednej strony dźwigni i naciśnij ręką (SIŁA) z drugiej strony, uważając na wywierany nacisk. PUNKT PODPARCIA SIŁA Zwróć uwagę na pozycję punktu podparcia! Ramię OPORU jest dłuższe. SIŁA jest większa niż OPÓR. EKPERYMENTUJ! OPÓR Nota: umieść na drążku punktu podparcia pierścień uszczelniający dźwigni, jak to pokazano na rysunku.



12 9 Skonstruuj wagę X X6 X Waga to dźwignia.typu WYPRÓBUJ! 0 Skonstruuj huśtawkę i wypróbuj X6 : :


13 Archimedes to wielki naukowiec, który już w III wieku p.n.e. eksperymentował z dźwigniami. Nota: dźwignia huśtawki powinna obracać się swobodnie wokół punktu podparcia. Ty też spróbuj: poszukaj równowagi huśtawki, zmieniając obciążenia i odległości między punktem podparcia a OPOREM i SIŁĄ. EKPERYMENTUJ! Huśtawka to dźwignia. typu

,")


14 KOŁA ZĘBATE Koła zębate służą przekazywaniu ruchu poprzez osie (drążki) umieszczone w szczególny sposób; zęby nadają ruch. W parze kół zębatych, jeśli jedno obraca się w jedną stronę, to drugie w przeciwną; z tych dwóch kół jedno przekazuje ruch (koło napędzające), drugie ruch odbiera (koło napędzane). Jeśli chce się utrzymać ten sam kierunek obrotów, należy między dwoma kołami umieścić trzecie koło zębate. Koła zębate mają rożną wielkość i różną liczbę zębów. Wiele kół zębatych tworzy przekładnie. Skonstruuj stanowisko do prób odwróconej rotacji Gotowe stanowisko


15 Kierunek przeciwny do kierunku obrotów wskazówek zegara Kierunek zgodny z kierunkiem obrotów wskazówek zegara : : 5



16 Skonstruuj model do eksperymentu z rotacją bezpośrednią X Stanowisko zbudowane w zadaniu nr Kierunek zgodny z kierunkiem obrotów wskazówek zegara : Kierunek zgodny z kierunkiem obrotów wskazówek zegara 6 :


17 Skonstruuj model do eksperymentu z ruchem przemiennym 6 X5 Stanowisko zbudowane w zadaniu nr 0 6 : : 7





18 Skonstruuj napęd pionowy Stanowisko zbudowane w zadaniu nr : :



19 5 Skonstruuj napęd pionowo poziomy 6 Stanowisko zbudowane w zadaniu nr 6 PRZEŁOŻENIE PRZEKŁADNI Przypatrz sie uważnie kołom zębatym, kiedy się obracają i porównaj obroty wykonywane przez różne koła. Kiedy największe koło wykona jeden obrót, najmniejsze zrobi ich. W tym wypadku możesz uzyskać potwierdzenie, robiąc dzielenie lub wyliczając ułamek między liczbą zębów obu kół zębatych. Przykład jak wyliczyć przełożenie przekładni: zębów (większe koło) =. obrotów 0 zębów (mniejsze koło) : 9








20 6 Skonstruuj przekładnię zębatą X5 : : 0 Informacje techniczne na temat przekładni zębatych Przekładnia przekształca ruch obrotowy w ruch prostoliniowy. W przypadku kierownicy samochodu ruch przekazywany do cięgien kół sprawia, ze są one skrętne. Kierownica samochodu Winda Pociąg



21 CZYNNOŚCI WSTĘPNE Złóż stanowisko kontrolne dla elementów przekładni Złożone stanowisko




22 7 Przekładnia ślimakowa do podnoszenia X6 X 0 Wiadomości techniczonaukowe Przekładnia ślimakowa to walcowa przekładnia spiralna. W połączeniu między kołem zębatym, a ślimakiem ten ostatni element nazywany jest przewodzącym, ponieważ ruch może być przekazany tylko ze ślimaka na koło, a nie odwrotnie. Ślimak jest więc potrzebny, aby zablokować koło w określonej pozycji. Stanowisko złożone podczas czynności wstępnych 0 :






23 8 Reduktor ślimakowy Przełożenie Dzięki przekładni ślimakowej można uzyskać duże przełożenia. Pokręć kołem i zaobserwuj, jak wolno obraca się przekładnia. 5 0 Stanowisko złożone podczas czynności wstępnych Sprawdź poprawność montażu : 5



24 9 Złącze Cardana X Aby zmontować złącze Cardana zastosuj się do instrukcji wydrukowanej na ulotce z ostrzeżeniami znajdującej się w opakowaniu. :





25 0 Użyj modułu napędowego w celu wywołania kontrrotacji. X X6 Wsuń moduł napędowy między belki, demontując częściowo stanowisko, a następnie umieść przekładnie, tak jak to pokazano na rysunku. Stanowisko złożone podczas czynności wstępnych. WYPRÓBUJ! : : 5




26 Użyj modułu napędowego, aby wywołać obroty w tym samym kierunku 6 X6 Sprawdź poprawność montażu 6 WYPRÓBUJ! Stanowisko złożone podczas czynności wstępnych. 6 : 6 : 6




27 Połącz przekładnię z koszem satelitów X6 X Stanowisko złożone podczas czynności wstępnych. WYPRÓBUJ! : : 7


28 Złóż rower stacjonarny 6 6 : 8 :



29 X : : : Wiadomości techniczne i ciekawostki Rok 968 Rower bez kół używany w domu lub na siłowni jest wynalazkiem stosunkowo niedawnym. Na ten genialny pomysł wpadł amerykański wynalazca Keene P. Dimick, który pomyślał o rowerze stacjonarnym, który pozwalałby na pedałowanie nawet bez kół. 9




30 Złóż ruchomą drabinkę do siłowni 6 Podstawa złożona w punkcie 5. : : 0



31 5 Zbuduj katapultę 5 5 Wiadomości techniczne i ciekawostki III wiek p.n.e. Archimedes udoskonalił katapultę, machinę wojenną używaną w Grecji już w czasach Aleksandra Wielkiego. Machina ta czerpała energię ze skręconych lin i włosów, które po uwolnieniu sprężynowały i powodowały wyrzut ramienia katapulty miotającego duże kamienie. Informacje naukowotechniczne Projekt ten czerpał z badań fizycznych i matematycznych. Rozmiary elastycznych pasów (skręconych lin) zależały od ciężaru kamieni i od odległości od celu (zasięg). : 5






32 X X6 6 : : 6 : : 6
MECHANIKI. Laboratorium SAMOCHÓD WYŚCIGOWY. Konstrukcje od 1 do 30
 4 Laboratorium MECHANIKI SAMOCHÓD WYŚCIGOWY Konstrukcje od 1 do 0 1 -Montaż dwóch belek -Montaż belek z zastosowaniem dwóch gwoździ -Łączenie belek 4 -Montaż trzech belek 5 -Prostopadłe złożenie belek
4 Laboratorium MECHANIKI SAMOCHÓD WYŚCIGOWY Konstrukcje od 1 do 0 1 -Montaż dwóch belek -Montaż belek z zastosowaniem dwóch gwoździ -Łączenie belek 4 -Montaż trzech belek 5 -Prostopadłe złożenie belek
MECHANIKI. Laboratorium. Konstrukcje od1 do 30
 Laboratorium MECHANIKI Konstrukcje od do 0 4 5 6 7 8 9 0 4 5 Montaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek Złożenie belki z
Laboratorium MECHANIKI Konstrukcje od do 0 4 5 6 7 8 9 0 4 5 Montaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek Złożenie belki z
MECHANIKI. Laboratorium. Konstrukcje od 40 do 50
 Laboratorium MECHANIKI Konstrukcje od 0 do 50 0 1 - - - - - 5 6 7 8 9 50 - - - - - - Pierwszy samochód na świecie Dawny czteroosobowy samochód Skonstruuj przekładnię zębatą Skonstruuj mechaniczną skrzynię
Laboratorium MECHANIKI Konstrukcje od 0 do 50 0 1 - - - - - 5 6 7 8 9 50 - - - - - - Pierwszy samochód na świecie Dawny czteroosobowy samochód Skonstruuj przekładnię zębatą Skonstruuj mechaniczną skrzynię
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
TEMAT 21: Maszyny proste.
 TEMAT 21: Maszyny proste. Większość osób kojarzy pojęcie "maszyna" jako skomplikowaną mechanicznie konstrukcję jak np. obrabiarka, wiertarka czy inne urządzenie posiadające napęd. Tymczasem, w fizyce maszyną
TEMAT 21: Maszyny proste. Większość osób kojarzy pojęcie "maszyna" jako skomplikowaną mechanicznie konstrukcję jak np. obrabiarka, wiertarka czy inne urządzenie posiadające napęd. Tymczasem, w fizyce maszyną
MECHANIKI. Laboratorium. Konstrukcje od 31 do 39
 Laboratorium MECHANIKI Konstrukcje od do 9 5 6 7 8 9 - - - - - - - - - Zbuduj dźwig ze stałym bloczkiem Zbuduj dźwig z ruchomym bloczkiem Skonstruuj połączone koła pasowe Żuraw wieżowy z wciągarką na silnik
Laboratorium MECHANIKI Konstrukcje od do 9 5 6 7 8 9 - - - - - - - - - Zbuduj dźwig ze stałym bloczkiem Zbuduj dźwig z ruchomym bloczkiem Skonstruuj połączone koła pasowe Żuraw wieżowy z wciągarką na silnik
Układ kierowniczy. Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek:
 1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
PL B1. ŻBIKOWSKI JERZY, Zielona Góra, PL BUP 03/06. JERZY ŻBIKOWSKI, Zielona Góra, PL WUP 09/11 RZECZPOSPOLITA POLSKA
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174823 (13) B1
 OPIS PATENTOWY (19) PL (11) 174823 (13) B1") RZECZPOSPOLITAPOLSKA (12) OPIS PATENTOWY (19) PL (11) 174823 (13) B1 (21) Numer zgłoszenia: 306627 Urząd Patentowy (22) Data zgłoszenia: 29.12.1994 Rzeczypospolitej Polskiej (51)IntCl6: B23B 39/02 B23B
RZECZPOSPOLITAPOLSKA (12) OPIS PATENTOWY (19) PL (11) 174823 (13) B1 (21) Numer zgłoszenia: 306627 Urząd Patentowy (22) Data zgłoszenia: 29.12.1994 Rzeczypospolitej Polskiej (51)IntCl6: B23B 39/02 B23B
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
ROBOTY ZDALNIE STAROWANE
 IMPORTER: educarium spółka z o.o. ul. Grunwaldzka 207, 85-451 Bydgoszcz tel. (52) 32 47 800, faks (52) 32 10 251, 32 47 880 e-mail: info@educarium.pl portal edukacyjny: www.educarium.pl sklep internetowy:
IMPORTER: educarium spółka z o.o. ul. Grunwaldzka 207, 85-451 Bydgoszcz tel. (52) 32 47 800, faks (52) 32 10 251, 32 47 880 e-mail: info@educarium.pl portal edukacyjny: www.educarium.pl sklep internetowy:
PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły.
 PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły. Pracę oznaczamy literą W Pracę obliczamy ze wzoru: W = F s W praca;
PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły. Pracę oznaczamy literą W Pracę obliczamy ze wzoru: W = F s W praca;
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/16
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
WZORU UŻYTKOWEGO (,9,PL <1» 63238
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
Podstawy Konstrukcji Maszyn. Wykład nr. 13 Przekładnie zębate
 Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
(12) OPIS PATENTOWY (19)PL (11)182858
 OPIS PATENTOWY (19)PL (11)182858") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)182858 (21) Numer zgłoszenia. 319132 Urząd Patentowy zgłoszenia. 2 0.0 3.1 9 9 7 Rzeczypospolitej Polskiej (51) IntCl7 B62K 5/02 (54) Rower trójkołowy
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)182858 (21) Numer zgłoszenia. 319132 Urząd Patentowy zgłoszenia. 2 0.0 3.1 9 9 7 Rzeczypospolitej Polskiej (51) IntCl7 B62K 5/02 (54) Rower trójkołowy
ności od kinematyki zazębie
 Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 14/14. BARTOSZ WIECZOREK, Poznań, PL MAREK ZABŁOCKI, Poznań, PL
 PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
PL B1. Maszyna do kształtowania elementów z udoskonalonymi mechanizmami przekładniowymi. FWU KUANG ENTERPRISES CO., LTD.
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210853 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 378430 (22) Data zgłoszenia: 14.12.2005 (51) Int.Cl. B21J 9/18 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210853 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 378430 (22) Data zgłoszenia: 14.12.2005 (51) Int.Cl. B21J 9/18 (2006.01)
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 186864 (21) Numer zgłoszenia: 326088 (22) Data zgłoszenia: 28.04.1998 (13) B1 (51) IntCl7 F03D 3/02 (54)
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 186864 (21) Numer zgłoszenia: 326088 (22) Data zgłoszenia: 28.04.1998 (13) B1 (51) IntCl7 F03D 3/02 (54)
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 03/08. BOGDAN BRANOWSKI, Poznań, PL JAROSŁAW FEDORCZUK, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
PL 210299 B1. MICHALCZEWSKI LECH PRZEDSIĘBIORSTWO PRODUKCYJNO-HANDLOWO-USŁUGOWE PLEXIFORM, Bojano, PL 16.03.2009 BUP 06/09 30.12.
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210299 (13) B1 (21) Numer zgłoszenia: 383355 (51) Int.Cl. B65B 1/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.09.2007
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210299 (13) B1 (21) Numer zgłoszenia: 383355 (51) Int.Cl. B65B 1/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.09.2007
PL B1. HIKISZ BARTOSZ, Łódź, PL BUP 05/07. BARTOSZ HIKISZ, Łódź, PL WUP 01/16. rzecz. pat.
 PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Rys. 1. Pływanie ciał - identyfikacja objętość części zanurzonej i objętości bryły parcia
 Wypór i równowaga ciał pływających po powierzchni Reakcja cieczy na ciało w niej zanurzone nazywa się wyporem. Siła wyporu działa pionowo i skierowana jest w górę. Wypór hydrostatyczny (można też mówić
Wypór i równowaga ciał pływających po powierzchni Reakcja cieczy na ciało w niej zanurzone nazywa się wyporem. Siła wyporu działa pionowo i skierowana jest w górę. Wypór hydrostatyczny (można też mówić
4. Oś Z. 4. Oś Z. Written By: Josef Prusa manual.prusa3d.com/ Page 1 of 17
 4. Oś Z Written By: Josef Prusa 2017 manual.prusa3d.com/ Page 1 of 17 Step 1 Potrzebne narzędzia Klucze płaskie 13/17 mm Śrubokręt płaski 3,6 mm Małe szczypce uniwersalne (kombinerki) Klucze imbusowe 2,5
4. Oś Z Written By: Josef Prusa 2017 manual.prusa3d.com/ Page 1 of 17 Step 1 Potrzebne narzędzia Klucze płaskie 13/17 mm Śrubokręt płaski 3,6 mm Małe szczypce uniwersalne (kombinerki) Klucze imbusowe 2,5
Written By: Dozuki System
 1. Ponowny montaż osi X Written By: Dozuki System 2019 manual.prusa3d.com/ Page 1 of 19 Step 1 Narzędzia niezbędne w tym rozdziale Szczypce do sprawdzenia naciągnięcia Klucz imbusowy 2,5 mm do śrub M3
1. Ponowny montaż osi X Written By: Dozuki System 2019 manual.prusa3d.com/ Page 1 of 19 Step 1 Narzędzia niezbędne w tym rozdziale Szczypce do sprawdzenia naciągnięcia Klucz imbusowy 2,5 mm do śrub M3
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Spis treści. Przedmowa 11
 Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
DOKUMENTACJA TECHNICZNO - RUCHOWA
 DOKUMENTACJA TECHNICZNO - RUCHOWA Opis techniczny 1.1. Przeznaczenie urządzenia W skład motoreduktora wchodzi silnik elektryczny i przekładnia różnicowa. Zadaniem przekładni różnicowej jest zmiana momentu
DOKUMENTACJA TECHNICZNO - RUCHOWA Opis techniczny 1.1. Przeznaczenie urządzenia W skład motoreduktora wchodzi silnik elektryczny i przekładnia różnicowa. Zadaniem przekładni różnicowej jest zmiana momentu
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 19/10
 PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
PIŁA ELEKTRYCZNA DO METALU
 PIŁA ELEKTRYCZNA DO METALU INSTRUKCJA OBSŁUGI 2 SPIS TREŚCI I. ZASTOSOWANIE... 2 II. WYMIARY I PARAMETRY TECHNICZNE... 2 III. KONSTRUKCJA PIŁY... 3 IV. SMAROWANIE... 4 V. PRZEGLĄD I KONSERWACJA... 4 VI.
PIŁA ELEKTRYCZNA DO METALU INSTRUKCJA OBSŁUGI 2 SPIS TREŚCI I. ZASTOSOWANIE... 2 II. WYMIARY I PARAMETRY TECHNICZNE... 2 III. KONSTRUKCJA PIŁY... 3 IV. SMAROWANIE... 4 V. PRZEGLĄD I KONSERWACJA... 4 VI.
PL 216136 B1. ŁAZUR ZBIGNIEW, Lublin, PL 27.09.2010 BUP 20/10. ZBIGNIEW ŁAZUR, Lublin, PL 31.03.2014 WUP 03/14 RZECZPOSPOLITA POLSKA
 PL 216136 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 216136 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387552 (22) Data zgłoszenia: 19.03.2009 (51) Int.Cl.
PL 216136 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 216136 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387552 (22) Data zgłoszenia: 19.03.2009 (51) Int.Cl.
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP (96) Data i numer zgłoszenia patentu europejskiego:
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP (96) Data i numer zgłoszenia patentu europejskiego:") RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 3011940 (96) Data i numer zgłoszenia patentu europejskiego: 08.10.2015 15460094.4 (13) (51) T3 Int.Cl. A61G 5/10 (2006.01)
RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 3011940 (96) Data i numer zgłoszenia patentu europejskiego: 08.10.2015 15460094.4 (13) (51) T3 Int.Cl. A61G 5/10 (2006.01)
(13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 B23K 7/10 RZECZPOSPOLITA POLSKA. Urząd Patentowy Rzeczypospolitej Polskiej
 B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 B23K 7/10 RZECZPOSPOLITA POLSKA. Urząd Patentowy Rzeczypospolitej Polskiej") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175070 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306629 Data zgłoszenia: 29.12.1994 (51) IntCl6: B23K 7/10 (54) Przecinarka
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175070 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306629 Data zgłoszenia: 29.12.1994 (51) IntCl6: B23K 7/10 (54) Przecinarka
MECHANIKI. Laboratorium CIĘŻARÓWKI. Konstrukcje od 1 do 10
 Laboratorium MECHANIKI CIĘŻARÓWKI Konstrukcje od 1 do 10 1 - Jak działa mechanizm różnicowy 2 - Historyczna ciężarówka 3 - Ciężarówka do użycia w kopalni 4 - Ciężarówka europejska 5 - Narzędzia robocze:
Laboratorium MECHANIKI CIĘŻARÓWKI Konstrukcje od 1 do 10 1 - Jak działa mechanizm różnicowy 2 - Historyczna ciężarówka 3 - Ciężarówka do użycia w kopalni 4 - Ciężarówka europejska 5 - Narzędzia robocze:
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej
 Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
Operacja technologiczna to wszystkie czynności wykonywane na jednym lub kilku przedmiotach.
 Temat 23 : Proces technologiczny i planowanie pracy. (str. 30-31) 1. Pojęcia: Proces technologiczny to proces wytwarzania towarów wg przepisów. Jest to zbiór czynności zmieniających właściwości fizyczne
Temat 23 : Proces technologiczny i planowanie pracy. (str. 30-31) 1. Pojęcia: Proces technologiczny to proces wytwarzania towarów wg przepisów. Jest to zbiór czynności zmieniających właściwości fizyczne
BRANO Podnośniki i wciągniki BRANO
 BRANO Podnośniki i wciągniki BRANO Wciągniki łańcuchowe RZC Podnośniki Brano katalog 2 ` TYP UDŹWIG LICZBA ŁAŃCUCHÓW ŁAŃCUCH NACISK NA DŹWIGNIĘ (N) PRĘDKOŚĆ WCIĄGANIA (M/MIN)* ZAKRES TEMPERATUR PRACY (
BRANO Podnośniki i wciągniki BRANO Wciągniki łańcuchowe RZC Podnośniki Brano katalog 2 ` TYP UDŹWIG LICZBA ŁAŃCUCHÓW ŁAŃCUCH NACISK NA DŹWIGNIĘ (N) PRĘDKOŚĆ WCIĄGANIA (M/MIN)* ZAKRES TEMPERATUR PRACY (
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
(13) B1 PL B1 (19) PL (11)
 B1 PL B1 (19) PL (11)") RZECZPOSPOLITA POLSKA ( 12) OPIS PATENTOWY (21) Numer zgłoszenia: 319170 Urząd Patentowy (22) Data zgłoszenia: 25.03.1997 Rzeczypospolitej Polskiej (19) PL (11) 182309 (13) B1 (51) IntCl7 G01N 3/08 G02B
RZECZPOSPOLITA POLSKA ( 12) OPIS PATENTOWY (21) Numer zgłoszenia: 319170 Urząd Patentowy (22) Data zgłoszenia: 25.03.1997 Rzeczypospolitej Polskiej (19) PL (11) 182309 (13) B1 (51) IntCl7 G01N 3/08 G02B
Moment obrotowy i moc silnika a jego obciążenie (3)
") Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
PL B1. Fabryka Aparatury Pomiarowej PAFAL Spółka Akcyjna,Świdnica,PL BUP 02/03
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 200169 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 348784 (22) Data zgłoszenia: 17.07.2001 (51) Int.Cl. G06M 3/00 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 200169 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 348784 (22) Data zgłoszenia: 17.07.2001 (51) Int.Cl. G06M 3/00 (2006.01)
Wyznaczenie równowagi w mechanizmie. Przykład 6
 Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Návod k použití. Instrukcja obsługi. Návod k použitiu. Instruction Leaflet PŘED POUŽITÍM SI PROSÍM PŘEČTĚTE DŮKLADNĚ NÁVOD A USCHOVEJTE HO!
 CZ Instrukcja obsługi Návod k použití PRZED UŻYCIEM PRZECZYTAJ SZCZEGÓŁY I ZACHOWAJ INSTRUKCJĘ OBSŁUGI PŘED POUŽITÍM SI PROSÍM PŘEČTĚTE DŮKLADNĚ NÁVOD A USCHOVEJTE HO! SK Instruction Leaflet Návod k použitiu
CZ Instrukcja obsługi Návod k použití PRZED UŻYCIEM PRZECZYTAJ SZCZEGÓŁY I ZACHOWAJ INSTRUKCJĘ OBSŁUGI PŘED POUŽITÍM SI PROSÍM PŘEČTĚTE DŮKLADNĚ NÁVOD A USCHOVEJTE HO! SK Instruction Leaflet Návod k použitiu
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
PL 212000 B1. WINDA WARSZAWA SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Warszawa, PL 26.11.2007 BUP 24/07. ANDRZEJ KATNER, Warszawa, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212000 (13) B1 (21) Numer zgłoszenia: 379699 (51) Int.Cl. B66B 11/08 (2006.01) B66B 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212000 (13) B1 (21) Numer zgłoszenia: 379699 (51) Int.Cl. B66B 11/08 (2006.01) B66B 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
, PCT/EP03/006959
 PL 212252 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 212252 (21) Numer zgłoszenia: 373407 (22) Data zgłoszenia: 01.07.2003 (86) Data i numer zgłoszenia
PL 212252 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 212252 (21) Numer zgłoszenia: 373407 (22) Data zgłoszenia: 01.07.2003 (86) Data i numer zgłoszenia
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 177338 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (2 1) Numer zgłoszenia: 310370 (22) Data zgłoszenia: 08.09.1995 (51) IntCl6: E21C 31/02 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 177338 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (2 1) Numer zgłoszenia: 310370 (22) Data zgłoszenia: 08.09.1995 (51) IntCl6: E21C 31/02 F16H
1. Kiść. 1. Kiść 5. Podstawa 2. Przedramię 6. Przewody łączeniowe 3. Ramię 7. Szafa sterownicza 4. Kolumna obrotowa
 1. Kiść 5. Podstawa 2. Przedramię 6. Przewody łączeniowe 3. Ramię 7. Szafa sterownicza 4. Kolumna obrotowa 1. Kiść Manipulator Kr 15 jest wyposażony w kiść dla ładunku użytecznego do 15 kg. Kiść mocowana
1. Kiść 5. Podstawa 2. Przedramię 6. Przewody łączeniowe 3. Ramię 7. Szafa sterownicza 4. Kolumna obrotowa 1. Kiść Manipulator Kr 15 jest wyposażony w kiść dla ładunku użytecznego do 15 kg. Kiść mocowana
Schody jezdne typoszereg 16000. Instrukcja montażu i eksploatacji
 Schody jezdne typoszereg 16000 Instrukcja montażu i eksploatacji Bydgoszcz Wydanie 2009 Uwagi ogólne 1. Schody jezdne typoszereg 16000 wykonane są ze stopu aluminium. 2. Zostały zaprojektowane z uwzględnieniem
Schody jezdne typoszereg 16000 Instrukcja montażu i eksploatacji Bydgoszcz Wydanie 2009 Uwagi ogólne 1. Schody jezdne typoszereg 16000 wykonane są ze stopu aluminium. 2. Zostały zaprojektowane z uwzględnieniem
Bryła sztywna Zadanie domowe
 Bryła sztywna Zadanie domowe 1. Podczas ruszania samochodu, w pewnej chwili prędkość środka przedniego koła wynosiła. Sprawdź, czy pomiędzy kołem a podłożem występował poślizg, jeżeli średnica tego koła
Bryła sztywna Zadanie domowe 1. Podczas ruszania samochodu, w pewnej chwili prędkość środka przedniego koła wynosiła. Sprawdź, czy pomiędzy kołem a podłożem występował poślizg, jeżeli średnica tego koła
Walce do zwijania blach DOKUMENTACJA TECHNICZNO RUCHOWA
 Walce do zwijania blach DOKUMENTACJA TECHNICZNO Stron 10 Strona 1 Spis treści I. Rysunek poglądowy maszyny 2 II. Podstawowe dane techniczne 4 III. Konstrukcja i przeznaczenie 4 IV. Układ napędowy 8 V.
Walce do zwijania blach DOKUMENTACJA TECHNICZNO Stron 10 Strona 1 Spis treści I. Rysunek poglądowy maszyny 2 II. Podstawowe dane techniczne 4 III. Konstrukcja i przeznaczenie 4 IV. Układ napędowy 8 V.
PL B1. POLITECHNIKA ŚLĄSKA, Gliwice, PL
 PL 214302 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 214302 (21) Numer zgłoszenia: 379747 (22) Data zgłoszenia: 22.05.2006 (13) B1 (51) Int.Cl.
PL 214302 B1 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 214302 (21) Numer zgłoszenia: 379747 (22) Data zgłoszenia: 22.05.2006 (13) B1 (51) Int.Cl.
lider projektu: finansowanie:
 lider projektu: finansowanie: - zapoznanie się z możliwościami budowania programów w Lego Mindstorms EV3 - budowa prostego robota z jednym silnikiem i jednym czujnikiem - naładowane zestawy Lego Mindstorms
lider projektu: finansowanie: - zapoznanie się z możliwościami budowania programów w Lego Mindstorms EV3 - budowa prostego robota z jednym silnikiem i jednym czujnikiem - naładowane zestawy Lego Mindstorms
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 14/14. BARTOSZ WIECZOREK, Poznań, PL MAREK ZABŁOCKI, Poznań, PL
 PL 223141 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223141 (13) B1 (21) Numer zgłoszenia: 402276 (51) Int.Cl. B62M 1/14 (2006.01) A61G 5/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223141 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223141 (13) B1 (21) Numer zgłoszenia: 402276 (51) Int.Cl. B62M 1/14 (2006.01) A61G 5/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL B1. TORQWAY SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Toruń, PL BUP 09/13. ANDRZEJ SOBOLEWSKI, Toruń, PL
 PL 221914 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221914 (13) B1 (21) Numer zgłoszenia: 396764 (51) Int.Cl. B62K 5/04 (2006.01) B62K 17/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 221914 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221914 (13) B1 (21) Numer zgłoszenia: 396764 (51) Int.Cl. B62K 5/04 (2006.01) B62K 17/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Maszyny proste. W razie potrzeby Edukatorzy chętnie udzielą pomocy.
 Maszyny proste Drogi Nauczycielu! Witamy serdecznie w Centrum Nauki Experyment. Przygotowana dla uczniów karta pracy zawiera pytania dotyczące stanowisk znajdujących się na sali wystawienniczej. Zadaniem
Maszyny proste Drogi Nauczycielu! Witamy serdecznie w Centrum Nauki Experyment. Przygotowana dla uczniów karta pracy zawiera pytania dotyczące stanowisk znajdujących się na sali wystawienniczej. Zadaniem
Podstawy Konstrukcji Maszyn
 0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 185043 (21) Numer zgłoszenia: 328197 (22) Data zgłoszenia: 14.01.1997 (86) Data i numer zgłoszenia międzynarodowego:
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 185043 (21) Numer zgłoszenia: 328197 (22) Data zgłoszenia: 14.01.1997 (86) Data i numer zgłoszenia międzynarodowego:
Ogólne zalecenia przy montażu produktów hellride.co
 Ogólne zalecenia przy montażu produktów Niniejsza instrukcja jest jedynie zbiorem wskazówek pomocnych podczas naszych produktów. Mogą wystąpić drobne różnice pomiędzy przedmiotami na zdjęciach a tymi,
Ogólne zalecenia przy montażu produktów Niniejsza instrukcja jest jedynie zbiorem wskazówek pomocnych podczas naszych produktów. Mogą wystąpić drobne różnice pomiędzy przedmiotami na zdjęciach a tymi,
(12) OPIS PATENTOWY (19)PL (11) (13) B1
 OPIS PATENTOWY (19)PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)160312 (13) B1 (21) Numer zgłoszenia: 280556 (51) IntCl5: Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.07.1989 F16H 57/12 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)160312 (13) B1 (21) Numer zgłoszenia: 280556 (51) IntCl5: Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.07.1989 F16H 57/12 (54)
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 21/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate
 Wykład 3 Analiza kinematyczna przekładnie zębate") Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate Lublin 2017 Dr inż. Łukasz Jedliński
Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate Lublin 2017 Dr inż. Łukasz Jedliński
Zwolnice przekładnie boczne
 Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
Mechanika teoretyczna
 Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Test powtórzeniowy nr 1
 Test powtórzeniowy nr 1 Grupa C... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Wykres przedstawia zależność
Test powtórzeniowy nr 1 Grupa C... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Wykres przedstawia zależność
LASER Instrukcja montażu i użytkowania LASER
 LASER Napęd do bram przesuwnych Instrukcja montażu i użytkowania Wymiary: Dane techniczne: W komplecie: 1. Korpus napędu z pokrywą. 7. Wkręty 3,5/19 do pokrywy 4 szt. 2. Podstawa montażowa. 8. Sprężyna
LASER Napęd do bram przesuwnych Instrukcja montażu i użytkowania Wymiary: Dane techniczne: W komplecie: 1. Korpus napędu z pokrywą. 7. Wkręty 3,5/19 do pokrywy 4 szt. 2. Podstawa montażowa. 8. Sprężyna
PL B1. INSTYTUT NAPĘDÓW I MASZYN ELEKTRYCZNYCH KOMEL, Katowice, PL BUP 02/16
 PL 224687 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224687 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 411500 (22) Data zgłoszenia: 06.03.2015 (51) Int.Cl.
PL 224687 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224687 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 411500 (22) Data zgłoszenia: 06.03.2015 (51) Int.Cl.
Gilotyna Modele Q 11 2 x 1300 Q 11 2 x 2000 Q 11 2,5 x 1600 Q 11 3 x 1300 Q 11 4 x 2000 Q 11 4 x 2500 DOKUMENTACJA TECHNICZNO RUCHOWA
 Modele Q 11 2 x 1300 Q 11 2 x 2000 Q 11 2,5 x 1600 Q 11 3 x 1300 Q 11 4 x 2000 Q 11 4 x 2500 DOKUMENTACJA TECHNICZNO Stron 7 Strona 1 Spis treści 1. Rysunek poglądowy maszyny 2 2. Podstawowe dane techniczne
Modele Q 11 2 x 1300 Q 11 2 x 2000 Q 11 2,5 x 1600 Q 11 3 x 1300 Q 11 4 x 2000 Q 11 4 x 2500 DOKUMENTACJA TECHNICZNO Stron 7 Strona 1 Spis treści 1. Rysunek poglądowy maszyny 2 2. Podstawowe dane techniczne
Mechanika. Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji.
 Mechanika Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji. Przyłożenie układu zerowego (układ sił równoważących się, np. dwie siły o takiej samej mierze,
Mechanika Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji. Przyłożenie układu zerowego (układ sił równoważących się, np. dwie siły o takiej samej mierze,
PL B BUP 13/ WUP 01/17
 PL 224581 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224581 (13) B1 (21) Numer zgłoszenia: 406525 (51) Int.Cl. B25J 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 224581 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224581 (13) B1 (21) Numer zgłoszenia: 406525 (51) Int.Cl. B25J 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL B1. NOWAK ANDRZEJ, Terebiń, PL BUP 17/16. ANDRZEJ NOWAK, Terebiń, PL WUP 12/17. rzecz. pat.
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227579 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 415255 (22) Data zgłoszenia: 11.12.2015 (51) Int.Cl. E21B 7/02 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227579 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 415255 (22) Data zgłoszenia: 11.12.2015 (51) Int.Cl. E21B 7/02 (2006.01)
INFORMATOR PRZEKŁADNIE ZĘBATE. 2 stopniowe walcowe 3 stopniowe stożkowo-walcowe. Fabryka Reduktorów i Motoreduktorów BEFARED S.A.
 INFORMATOR EM PRZEKŁADNIE ZĘBATE 2 stopniowe walcowe 3 stopniowe stożkowo-walcowe Fabryka Reduktorów i Motoreduktorów BEFARED S.A. Ul. Grażyńskiego 71 43-300 Bielsko Biała POLAND Tel.: +48 33 812 60 31-35;
INFORMATOR EM PRZEKŁADNIE ZĘBATE 2 stopniowe walcowe 3 stopniowe stożkowo-walcowe Fabryka Reduktorów i Motoreduktorów BEFARED S.A. Ul. Grażyńskiego 71 43-300 Bielsko Biała POLAND Tel.: +48 33 812 60 31-35;
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Instrukcja montażu i obsługi EB PL. Napęd ręczny montowany z boku zaworu typ dla skoku nominalnego do 30 mm
 Napęd ręczny montowany z boku zaworu typ 3273 dla skoku nominalnego do 30 mm Instrukcja montażu i obsługi EB 8312-2 PL Wydanie: listopad 2015 (10/13) Wskazówki i ich znaczenie NIEBEZPIECZEŃSTWO! Niebezpieczne
Napęd ręczny montowany z boku zaworu typ 3273 dla skoku nominalnego do 30 mm Instrukcja montażu i obsługi EB 8312-2 PL Wydanie: listopad 2015 (10/13) Wskazówki i ich znaczenie NIEBEZPIECZEŃSTWO! Niebezpieczne
Test powtórzeniowy nr 1
 Test powtórzeniowy nr 1 Grupa A... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Na wykresie przedstawiono zależność
Test powtórzeniowy nr 1 Grupa A... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Na wykresie przedstawiono zależność
13. WYZNACZANIE CHARAKTERYSTYK ORAZ PRZEŁOŻENIA UKŁADU KIEROWNICZEGO
 13. WYZNACZANIE CHARAKTERYSTYK ORAZ PRZEŁOŻENIA UKŁADU KIEROWNICZEGO 13.0. Uwagi dotyczące bezpieczeństwa podczas wykonywania ćwiczenia 1. Studenci są zobowiązani do przestrzegania ogólnych przepisów BHP
13. WYZNACZANIE CHARAKTERYSTYK ORAZ PRZEŁOŻENIA UKŁADU KIEROWNICZEGO 13.0. Uwagi dotyczące bezpieczeństwa podczas wykonywania ćwiczenia 1. Studenci są zobowiązani do przestrzegania ogólnych przepisów BHP
m OPIS OCHRONNY PL 59825
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA m OPIS OCHRONNY PL 59825 WZORU UŻYTKOWEGO u) Y1 (21) Numer zgłoszenia: 108523 51) Intel7: Urząd Patentowy Rzeczypospolitej Polskiej @ Data zgłoszenia: 19.08.1998
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA m OPIS OCHRONNY PL 59825 WZORU UŻYTKOWEGO u) Y1 (21) Numer zgłoszenia: 108523 51) Intel7: Urząd Patentowy Rzeczypospolitej Polskiej @ Data zgłoszenia: 19.08.1998
SZKOŁA POLICEALNA dla dorosłych
 SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
PRACA. MOC. ENERGIA. 1/20
 PRACA. MOC. ENERGIA. 1/20 Czym jest energia? Większość zjawisk w przyrodzie związana jest z przemianami energii. Energia może zostać przekazana od jednego ciała do drugiego lub ulec przemianie z jednej
PRACA. MOC. ENERGIA. 1/20 Czym jest energia? Większość zjawisk w przyrodzie związana jest z przemianami energii. Energia może zostać przekazana od jednego ciała do drugiego lub ulec przemianie z jednej
Podstawy urządzeń okrętowych
 Podstawy urządzeń okrętowych - wykład URZĄDZENIA STEROWE Literatura: Perepeczko Andrzej; Okrętowe urządzenia sterowe, Wyd. Morskie, Gdańsk 1983 (sygnatura II 181564, II 181565) Orszulok Wojciech, Wewiórski
Podstawy urządzeń okrętowych - wykład URZĄDZENIA STEROWE Literatura: Perepeczko Andrzej; Okrętowe urządzenia sterowe, Wyd. Morskie, Gdańsk 1983 (sygnatura II 181564, II 181565) Orszulok Wojciech, Wewiórski
Danuta Jasińska Choromańska, Dariusz Kołodziej, Marcin Zaczyk. Człowiek- najlepsza inwestycja
 Danuta Jasińska Choromańska, Dariusz Kołodziej, Marcin Zaczyk WKPI Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego STOSOWANIE
Danuta Jasińska Choromańska, Dariusz Kołodziej, Marcin Zaczyk WKPI Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego STOSOWANIE
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 2241785. (96) Data i numer zgłoszenia patentu europejskiego: 02.10.2008 08872337.
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 2241785. (96) Data i numer zgłoszenia patentu europejskiego: 02.10.2008 08872337.") RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 224178 (96) Data i numer zgłoszenia patentu europejskiego: 02..08 08872337.4 (13) (1) T3 Int.Cl. F16H 33/ (06.01) F03G 3/00
RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 224178 (96) Data i numer zgłoszenia patentu europejskiego: 02..08 08872337.4 (13) (1) T3 Int.Cl. F16H 33/ (06.01) F03G 3/00
Schody jezdne pomostowe typoszereg Instrukcja montażu i eksploatacji
 Schody jezdne pomostowe typoszereg 17000 Instrukcja montażu i eksploatacji Bydgoszcz Wydanie 2010 Uwagi ogólne 1. Schody jezdne pomostowe typoszereg 17000 wykonane są ze stopu aluminium. 2. Zostały zaprojektowane
Schody jezdne pomostowe typoszereg 17000 Instrukcja montażu i eksploatacji Bydgoszcz Wydanie 2010 Uwagi ogólne 1. Schody jezdne pomostowe typoszereg 17000 wykonane są ze stopu aluminium. 2. Zostały zaprojektowane
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180566 (21) Numer zgłoszenia: 312590 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 30.01.1996 (51) IntCl7 B23P 19/06 B25B
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180566 (21) Numer zgłoszenia: 312590 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 30.01.1996 (51) IntCl7 B23P 19/06 B25B
MECHANIKI. Laboratorium. Konstrukcje od 1 do 3. Clementoni Polska Sp. z o.o. ul. Budowlanych 27, Gdańsk,Polska
 1 Laboratorium 1-2 - 3 - MECHANIKI Konstrukcje od 1 do 3 Ładowarka Walec Równiarka UWAGA! Aby zagwarantować odpowiednie działanie silnika elektrycznego, podczas produkcji została dodana niewielka ilość
1 Laboratorium 1-2 - 3 - MECHANIKI Konstrukcje od 1 do 3 Ładowarka Walec Równiarka UWAGA! Aby zagwarantować odpowiednie działanie silnika elektrycznego, podczas produkcji została dodana niewielka ilość
PL B1. Płonka Krzysztof,Bielsko-Biała,PL BUP 25/06. Rygiel Andrzej, Kancelaria Rzecznika Patentowego
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 204808 (13) B1 (21) Numer zgłoszenia: 375609 (51) Int.Cl. G04B 15/08 (2006.01) G04C 3/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 204808 (13) B1 (21) Numer zgłoszenia: 375609 (51) Int.Cl. G04B 15/08 (2006.01) G04C 3/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
PL B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL BUP 12/14. ANTONI SZUMANOWSKI, Warszawa, PL PAWEŁ KRAWCZYK, Ciechanów, PL
 PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL B1. LISICKI JANUSZ ZAKŁAD PRODUKCYJNO HANDLOWO USŁUGOWY EXPORT IMPORT, Pukinin, PL BUP 17/16. JANUSZ LISICKI, Pukinin, PL
 PL 226242 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226242 (13) B1 (21) Numer zgłoszenia: 411231 (51) Int.Cl. A01D 46/26 (2006.01) A01D 46/00 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 226242 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226242 (13) B1 (21) Numer zgłoszenia: 411231 (51) Int.Cl. A01D 46/26 (2006.01) A01D 46/00 (2006.01) Urząd Patentowy Rzeczypospolitej
INSTRUKCJA SKŁADANIA DRABINKI WYSOKOŚĆ 91,107,122 CM
 INSTRUKCJA SKŁADANIA DRABINKI WYSOKOŚĆ 91,107,122 CM SPIS TREŚCI : OSTRZEŻENIA - 2 LISTA CZĘŚCI - 3-4 MONTAŻ - 5-8 ZASADY BEZPIECZEŃSTWA - 8 SERWIS W POLSCE - 8 1 PRZECZYTAJ UWAZNIE I POSTĘPUJ ZAWSZE ZGODNIE
INSTRUKCJA SKŁADANIA DRABINKI WYSOKOŚĆ 91,107,122 CM SPIS TREŚCI : OSTRZEŻENIA - 2 LISTA CZĘŚCI - 3-4 MONTAŻ - 5-8 ZASADY BEZPIECZEŃSTWA - 8 SERWIS W POLSCE - 8 1 PRZECZYTAJ UWAZNIE I POSTĘPUJ ZAWSZE ZGODNIE
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 05/18. WOJCIECH SAWCZUK, Bogucin, PL MAŁGORZATA ORCZYK, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229658 (13) B1 (21) Numer zgłoszenia: 418362 (51) Int.Cl. F02B 41/00 (2006.01) F02B 75/32 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229658 (13) B1 (21) Numer zgłoszenia: 418362 (51) Int.Cl. F02B 41/00 (2006.01) F02B 75/32 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
(13) B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL
 B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 163271 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 286299 (22) Data zgłoszenia: 01.08.1990 (51) IntCl5: F03D 3/02 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 163271 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 286299 (22) Data zgłoszenia: 01.08.1990 (51) IntCl5: F03D 3/02 (54)
Skrzynka narzędzi do ustawienia i regulacji mechanizmu rozrządu silników z łańcuchem Zestaw narzędzi do ustawiania mechanizmu rozrządu silników
 Skrzynka narzędzi do ustawienia i regulacji mechanizmu rozrządu silników z łańcuchem Zestaw narzędzi do ustawiania mechanizmu rozrządu silników benzynowych i diesla (patrz tabela zastosowań) Skrzynka do
Skrzynka narzędzi do ustawienia i regulacji mechanizmu rozrządu silników z łańcuchem Zestaw narzędzi do ustawiania mechanizmu rozrządu silników benzynowych i diesla (patrz tabela zastosowań) Skrzynka do