Wyznaczenie równowagi w mechanizmie. Przykład 6
|
|
|
- Patryk Bednarek
- 6 lat temu
- Przeglądów:
Transkrypt
1 Wyznaczenie równowagi w mechanizmie Przykład 6
2 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =?
3 M b F ma b a M J b F b
4 M b Para sił F b M b F b h F b a F b h M F b b J ma
5 a F b F b F b a F b h
6 0 F 03 F 3 3 Człon 3: F 3 F 03 0 F b A 0 M
7 0 F 03 F 3 3 Człon 3: F 3 F 03 0 F b F Człon : Fb 3 F 0 A 0 M
8 0 3 F 3 F 30 F F b F F 3 A 0 M F Fb 3 F 0
9 0 3 F 3 F 30 F F b h F F 3 A 0 M F 0 F 0 M A F 0 0 M Fh 0

10 Przekładnie zębate
11 Przekładnie zębate - cel V M Przekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Przeniesienie ruchu z jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej
12 Podział kryterium: układ osi zazębienie Dostarczamy strumień mocy M h a Odbieramy strumień mocy M Podział przekładni zębatych a h typ przekładni a 0 h 0 walcowa a 0 h 0 stożkowa a / h 0 ślimakowa a 0 h 0 śrubowa



13 zazębienie Dostarczamy strumień mocy M Podział przekładni zębatych Odbieramy strumień mocy M h a a h typ przekładni a 0 h 0 walcowa a 0 h 0 stożkowa a / h 0 ślimakowa a 0 h 0 śrubowa

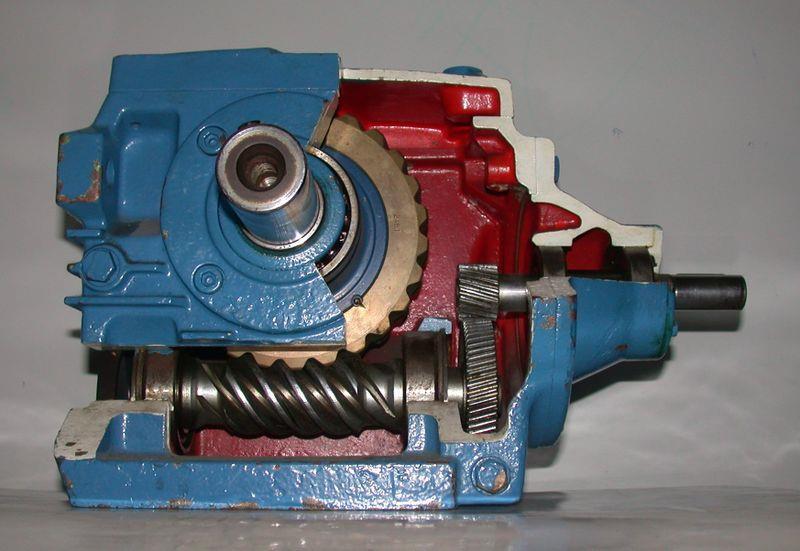



14 Przykłady przekładni zębatych
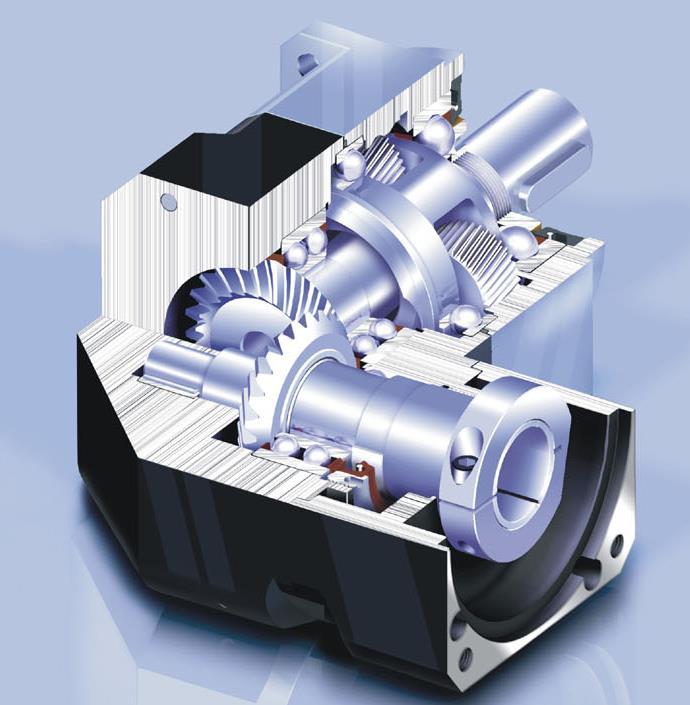

15 Przykłady przekładni zębatych


16 Przekładnie o osiach stałych przełożenie kinematyczne i k = wyjscia / wejscia Zazębienie zewnętrzne
17 Przekładnie o osiach stałych przełożenie kinematyczne i k = wyjscia / wejscia Zazębienie zewnętrzne v A = v = R A B v A =v B =v v B = v = R v R v R i R ( ) ( ) R z z


18 Przekładnie o osiach stałych przełożenie kinematyczne i k = wyjscia / wejscia Zazębienie wewnętrzne
19 Przekładnie o osiach stałych przełożenie kinematyczne i k = wyjscia / wejscia Zazębienie wewnętrzne B A v A =v B =v v A = v = R v B = v = R v R v R i R ( ) ( ) R z z
 3 3 4 = (-z 3 /z 4 ) (z /z 3 ) 4 / = (z /z 3 )(-z 3 /z 4 ) i 4 = (z /z 3 )(- z 3 /z 4 ) i 4 = i 3 i")
20 Przekładnie zębate wielostopniowe Dane: z i Szukane: i 4 = 4 / i 3 = 3 / = z /z 3 3 = (z /z 3 ) i 43 = 4 / 3 = - z 3 /z 4 4 = (-z 3 /z 4 ) = (-z 3 /z 4 ) (z /z 3 ) 4 / = (z /z 3 )(-z 3 /z 4 ) i 4 = (z /z 3 )(- z 3 /z 4 ) i 4 = i 3 i 43

21 Przekładnie zębate wielostopniowe
22 Własności przekładni zębatych o osiach stałych Małe przełożenia na jednym zezębieniu Duże gabaryty i duża masa Duże przełożenia uzyskuje się dzięki wielu zazębieniom Występowanie luzów międzyzębnych Stosunkowo tanie w wykonaniu i eksploatacji
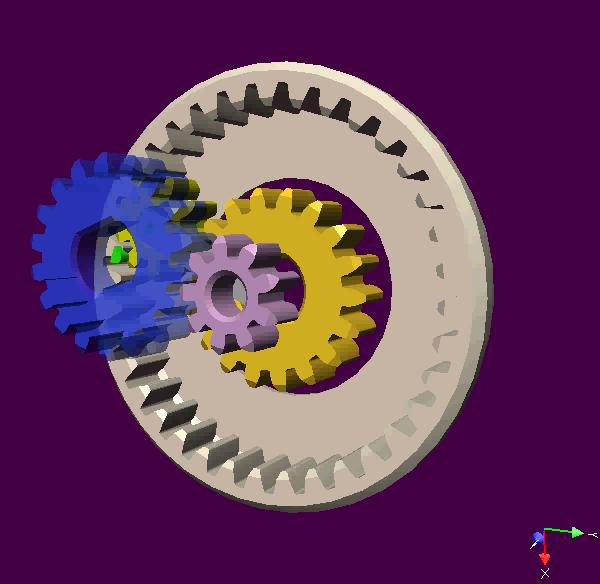
23 PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W= Różnicowe i sumujące: W>
24 Przekładnie obiegowe: Planetarne: W= I II 3 ( j ) I n=3 p = p = W = 3(n-) - p - p W =
25 Przekładnie obiegowe: Różnicowe i sumujące: W> I 3 II I 4 ( j ) I n=4 p =3 p = W = 3(n-) - p - p W =
26



27
28 Własności przekładni obiegowych Duże przełożenia przy zwartej budowie Zdolność przenoszenia dużych sił (mocy) Możliwość rozdziału napędu na kilka odbiorników (W>) p. różnicowe Możliwość sumowania kilku napędów (W>) p. sumujące Ciekawe trajektorie punktów kół obiegowych Wysokie wymagania dokładnościowe - koszty
29 Zdolność przenoszenia dużych sił (mocy) Satelita Jarzmo Koło centralne Koło centralne
30 Zdolność przenoszenia dużych sił (mocy) Satelita Satelita 3 Satelita Potrojenie liczby par zazębień duże moce i momenty
31 Możliwość rozdziału napędu na kilka odbiorników (W>) p. różnicowe

32
 Masa 400 kg Prz.")
33 Moc: 750 kw, i = 8 40x30 60x50 850x50 50x600 Masa 87 kg Prz. obiegowe (a- wykonanie specjalne) Masa 400 kg Prz. zwykłe, szeregowe
34 Trajektorie punktów satelitów
35 Przekładnia obiegowa - trajektoria po-ham.sam
36 Przekładnia obiegowa - trajektoria po-line.sam
37 Przekładnia obiegowa - trajektoria po-stop.sam

38 Istota metody analitycznej - szukamy i j = / j =? 3 J widok z jarzma J 3j j j
39 3 z z i J J Przełożenie kinematyczne i j = / j 3 J J 3 3 z z z z J J 3 0 z z 3 J J 3 z z J
40 4 3 Przełożenie kinematyczne i k Widziane z jarzma: 4 3 J J z z z z 3 3? J J Wynik: Ponieważ: 0 3 J z z 3 z z 4 Zał : z 0; z 5; z3 99; z4 J
Przekładnie zębate - cel
 Prekładnie ębate Prekładnie ębate - cel V M Prekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Preniesienie ruchu jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej Podiał kryterium: układ osi
Prekładnie ębate Prekładnie ębate - cel V M Prekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Preniesienie ruchu jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej Podiał kryterium: układ osi
PRZEKŁADNIE ZĘBATE. Przekł. o osiach stałych. Przekładnie obiegowe. Planetarne: W=1 Różnicowe i sumujące: W>1
 PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
Mechanizmy zębate Przekładnie zębate
 Mechanimy ębate Prekładnie ębate Prekładnie ębate - cel V M Prekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Preniesienie ruchu jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej Podiał kryterium:
Mechanimy ębate Prekładnie ębate Prekładnie ębate - cel V M Prekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Preniesienie ruchu jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej Podiał kryterium:
PL B1. HIKISZ BARTOSZ, Łódź, PL BUP 05/07. BARTOSZ HIKISZ, Łódź, PL WUP 01/16. rzecz. pat.
 PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Zwolnice przekładnie boczne
 Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate
 Wykład 3 Analiza kinematyczna przekładnie zębate") Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate Lublin 2017 Dr inż. Łukasz Jedliński
Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate Lublin 2017 Dr inż. Łukasz Jedliński
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Podstawy Konstrukcji Maszyn. Wykład nr. 13 Przekładnie zębate
 Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/16
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
Koła stożkowe o zębach skośnych i krzywoliniowych oraz odpowiadające im zastępcze koła walcowe wytrzymałościowo równoważne
 Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
PL B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL BUP 12/14. ANTONI SZUMANOWSKI, Warszawa, PL PAWEŁ KRAWCZYK, Ciechanów, PL
 PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 14/14. BARTOSZ WIECZOREK, Poznań, PL MAREK ZABŁOCKI, Poznań, PL
 PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
ANALIZA KINEMATYCZNA ZŁOŻONYCH KONSTRUKCYJNIE PRZEKŁADNI OBIEGOWYCH DO ELEKTROMECHANICZNYCH ZESPOŁÓW NAPĘDOWYCH Z ZASTOSOWANIEM WZORÓW WILLISA
 Maszyny Elektryczne - Zeszyty Problemowe Nr 1/2019 (121) 37 Szczepan Opach Instytut Napędów i Maszyn Elektrycznych KOMEL, Katowice ANALIZA KINEMATYCZNA ZŁOŻONYCH KONSTRUKCYJNIE PRZEKŁADNI OBIEGOWYCH DO
Maszyny Elektryczne - Zeszyty Problemowe Nr 1/2019 (121) 37 Szczepan Opach Instytut Napędów i Maszyn Elektrycznych KOMEL, Katowice ANALIZA KINEMATYCZNA ZŁOŻONYCH KONSTRUKCYJNIE PRZEKŁADNI OBIEGOWYCH DO
ności od kinematyki zazębie
 Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
ZARYS TEORII MECHANIZMÓW I MASZYN
 cssno JAN ODERFELD ZARYS TEORII MECHANIZMÓW I MASZYN ŁÓDŹ - 1959 - WARSZAWA PAŃSTWOWE WYDAWNICTWO NAUKOWE Spia- rzeczy SPIS' RZECZY Pr a edmowa... 4... *.... 3 1. Wstęp '. 5 2. Struktura mechanizmów-k
cssno JAN ODERFELD ZARYS TEORII MECHANIZMÓW I MASZYN ŁÓDŹ - 1959 - WARSZAWA PAŃSTWOWE WYDAWNICTWO NAUKOWE Spia- rzeczy SPIS' RZECZY Pr a edmowa... 4... *.... 3 1. Wstęp '. 5 2. Struktura mechanizmów-k
(13) B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL
 B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
Projektowanie Systemów Elektromechanicznych. Wykład 3 Przekładnie
 Projektowanie Systemów Elektromechanicznych Wykła 3 Przekłanie Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie Przekłanie Hyrauliczne: Hyrostatyczne; Hyrokinetyczne
Projektowanie Systemów Elektromechanicznych Wykła 3 Przekłanie Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie Przekłanie Hyrauliczne: Hyrostatyczne; Hyrokinetyczne
ogólna charakterystyka
 PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
Egzamin 1 Strona 1. Egzamin - AR egz Zad 1. Rozwiązanie: Zad. 2. Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same
 Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Przekładnie zębate. Klasyfikacja przekładni zębatych. 1. Ze względu na miejsce zazębienia. 2. Ze względu na ruchomość osi
 Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
SERIA AT. Precyzyjne Przekładnie Kątowe
 SERIA AT Precyzyjne Przekładnie Kątowe Seria AT Charakterystyka Obudowa wykonana z jednego kawałka stali nierdzewnej zapewnia wysoką sztywność i odporność na korozję. Wielokrotna precyzyjna obróbka powierzchni
SERIA AT Precyzyjne Przekładnie Kątowe Seria AT Charakterystyka Obudowa wykonana z jednego kawałka stali nierdzewnej zapewnia wysoką sztywność i odporność na korozję. Wielokrotna precyzyjna obróbka powierzchni
SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE
 SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE 1 Zakres momentów przenoszonych przez przekładnie przemysłowe w zestawieniu do motoreduktorów
SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE 1 Zakres momentów przenoszonych przez przekładnie przemysłowe w zestawieniu do motoreduktorów
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 19/10
 PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
PL 218159 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218159 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387380 (22) Data zgłoszenia: 02.03.2009 (51) Int.Cl.
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175715 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21)Numer zgłoszenia: 307901 (22) Data zgłoszenia: 27.03.1995 (51) IntCl6: B66D 1/12 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175715 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21)Numer zgłoszenia: 307901 (22) Data zgłoszenia: 27.03.1995 (51) IntCl6: B66D 1/12 (54)
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
WZORU UŻYTKOWEGO (,9,PL <1» 63238
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
SZKOŁA POLICEALNA dla dorosłych
 SZKOŁA POLICEALNA dla dorosłych Kierunek kształcenia w zawodzie: www. samochodowka.edu.pl Przedmiot: dr inż. Janusz Walkowiak PLAN WYKŁADU 1. Wały napędowe 1.1. Budowa i zadania wałów napędowych 1.2.
SZKOŁA POLICEALNA dla dorosłych Kierunek kształcenia w zawodzie: www. samochodowka.edu.pl Przedmiot: dr inż. Janusz Walkowiak PLAN WYKŁADU 1. Wały napędowe 1.1. Budowa i zadania wałów napędowych 1.2.
SZKOŁA POLICEALNA dla dorosłych
 SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
Teoria maszyn i mechanizmów Kod przedmiotu
 Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
LABORATORIUM DYNAMIKI MASZYN. Redukcja momentów bezwładności do określonego punktu redukcji
 LABORATORIUM DYNAMIKI MASZYN Wydział Budowy Maszyn i Zarządzania Kierunek: Mechanika i Budowa Maszyn Zakład Wibroakustyki i Bio-Dynamiki Systemów Ćwiczenie nr 2 Redukcja momentów bezwładności do określonego
LABORATORIUM DYNAMIKI MASZYN Wydział Budowy Maszyn i Zarządzania Kierunek: Mechanika i Budowa Maszyn Zakład Wibroakustyki i Bio-Dynamiki Systemów Ćwiczenie nr 2 Redukcja momentów bezwładności do określonego
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym
 Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 03/08. BOGDAN BRANOWSKI, Poznań, PL JAROSŁAW FEDORCZUK, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
Spis treści. Przedmowa 11
 Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
SEW-Eurodrive na świecie
 SEW-Eurodrive na świecie 75 Zakłady montażowe 15 Zakłady produkcyjne Jesteśmy w 50 krajach Istniejemy od ponad 85 lat Historia i rozwój firmy w Polsce 1996-17.07.1996 rejestracja firmy SEW-Eurodrive Polska
SEW-Eurodrive na świecie 75 Zakłady montażowe 15 Zakłady produkcyjne Jesteśmy w 50 krajach Istniejemy od ponad 85 lat Historia i rozwój firmy w Polsce 1996-17.07.1996 rejestracja firmy SEW-Eurodrive Polska
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 14/14. BARTOSZ WIECZOREK, Poznań, PL MAREK ZABŁOCKI, Poznań, PL
 PL 223141 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223141 (13) B1 (21) Numer zgłoszenia: 402276 (51) Int.Cl. B62M 1/14 (2006.01) A61G 5/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223141 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223141 (13) B1 (21) Numer zgłoszenia: 402276 (51) Int.Cl. B62M 1/14 (2006.01) A61G 5/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Szanowni Państwo, walcowe stożkowe stożkowo-walcowe ślimakowe planetarne
 Szanowni Państwo, Katalog handlowy który przedstawiamy inżynierom i technikom specjalistom z branży przemysłowej, przedstawia długoletnie doświadczenia w dziedzinie produkcji i wdrażania napędów. Nasz
Szanowni Państwo, Katalog handlowy który przedstawiamy inżynierom i technikom specjalistom z branży przemysłowej, przedstawia długoletnie doświadczenia w dziedzinie produkcji i wdrażania napędów. Nasz
WYDZIAŁ ZARZĄDZANIA PODSTAWY TECHNIKI I TECHNOLOGII
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ZARZĄDZANIA KATEDRA ZARZĄDZANIA PRODUKCJĄ Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY TECHNIKI I TECHNOLOGII Kod przedmiotu: ISO1123, I NO1123 Numer ćwiczenia:
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ZARZĄDZANIA KATEDRA ZARZĄDZANIA PRODUKCJĄ Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY TECHNIKI I TECHNOLOGII Kod przedmiotu: ISO1123, I NO1123 Numer ćwiczenia:
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ
 KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
INFORMATOR PRZEKŁADNIE ZĘBATE. 2 stopniowe walcowe 3 stopniowe stożkowo-walcowe. Fabryka Reduktorów i Motoreduktorów BEFARED S.A.
 INFORMATOR EM PRZEKŁADNIE ZĘBATE 2 stopniowe walcowe 3 stopniowe stożkowo-walcowe Fabryka Reduktorów i Motoreduktorów BEFARED S.A. Ul. Grażyńskiego 71 43-300 Bielsko Biała POLAND Tel.: +48 33 812 60 31-35;
INFORMATOR EM PRZEKŁADNIE ZĘBATE 2 stopniowe walcowe 3 stopniowe stożkowo-walcowe Fabryka Reduktorów i Motoreduktorów BEFARED S.A. Ul. Grażyńskiego 71 43-300 Bielsko Biała POLAND Tel.: +48 33 812 60 31-35;
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
1 Wstęp Słowo wstępne Ogólne wskazówki dot. czynności montażowych Zastosowane symbole...15
 1 Wstęp...11 1.1 Słowo wstępne...11 1.2 Ogólne wskazówki dot. czynności montażowych...13 1.3 Zastosowane symbole...15 2 Skrzynia sprzęgłowa gr. 108...17 2.1 Wskazówki ogólne...17 2.2 Demontaż bębna napędzanego
1 Wstęp...11 1.1 Słowo wstępne...11 1.2 Ogólne wskazówki dot. czynności montażowych...13 1.3 Zastosowane symbole...15 2 Skrzynia sprzęgłowa gr. 108...17 2.1 Wskazówki ogólne...17 2.2 Demontaż bębna napędzanego
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
Analiza korelacji wskaźników dystrybucji momentu obrotowego do wielkości luzu w mechanizmie różni-cowym samochodu
 Lucjan Król 1 Politechnika Opolska Analiza korelacji wskaźników dystrybucji momentu obrotowego do wielkości luzu w mechanizmie różni-cowym samochodu Wstęp Mechanizm różnicowy jest niezwykle ważnym elementem
Lucjan Król 1 Politechnika Opolska Analiza korelacji wskaźników dystrybucji momentu obrotowego do wielkości luzu w mechanizmie różni-cowym samochodu Wstęp Mechanizm różnicowy jest niezwykle ważnym elementem
Moment obrotowy i moc silnika a jego obciążenie (3)
") Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Budowa i działanie zautomatyzowanych skrzyń biegów
 Budowa i działanie zautomatyzowanych skrzyń biegów Jest to najczęściej konwencjonalna mechaniczna skrzynia biegów wyposażona w mechanizmy automatycznie przełączające biegi. Rys. 4.99/255 ziel Zmiana biegów
Budowa i działanie zautomatyzowanych skrzyń biegów Jest to najczęściej konwencjonalna mechaniczna skrzynia biegów wyposażona w mechanizmy automatycznie przełączające biegi. Rys. 4.99/255 ziel Zmiana biegów
Liczba cylindrów 4 4 4
 SILNIK Liczba cylindrów 4 4 4 Typ Poziom emisji Stage IV Stage IV Stage IV Pojemność silnika 4.485 4.485 4.485 Maksymalna moc silnika z systemem zarządzania mocą (KM(KW)) Maksymalna moc silnika (KM (kw))
SILNIK Liczba cylindrów 4 4 4 Typ Poziom emisji Stage IV Stage IV Stage IV Pojemność silnika 4.485 4.485 4.485 Maksymalna moc silnika z systemem zarządzania mocą (KM(KW)) Maksymalna moc silnika (KM (kw))
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN. Ćwiczenie OB-2 BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ
 POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie OB-2 Temat: BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ Opracował: mgr inż. St. Sucharzewski Zatwierdził: prof.
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie OB-2 Temat: BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ Opracował: mgr inż. St. Sucharzewski Zatwierdził: prof.
PL B1. Układ przeniesienia napędu do hybrydowych pojazdów roboczych dużej mocy zwłaszcza wózków widłowych o dużym udźwigu
 PL 219224 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219224 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 394214 (22) Data zgłoszenia: 15.03.2011 (51) Int.Cl.
PL 219224 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219224 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 394214 (22) Data zgłoszenia: 15.03.2011 (51) Int.Cl.
INSTRUKCJA DO ĆWICZENIA NR 2. Analiza kinematyczna napędu z przekładniami
 INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
Operacja technologiczna to wszystkie czynności wykonywane na jednym lub kilku przedmiotach.
 Temat 23 : Proces technologiczny i planowanie pracy. (str. 30-31) 1. Pojęcia: Proces technologiczny to proces wytwarzania towarów wg przepisów. Jest to zbiór czynności zmieniających właściwości fizyczne
Temat 23 : Proces technologiczny i planowanie pracy. (str. 30-31) 1. Pojęcia: Proces technologiczny to proces wytwarzania towarów wg przepisów. Jest to zbiór czynności zmieniających właściwości fizyczne
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 177338 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (2 1) Numer zgłoszenia: 310370 (22) Data zgłoszenia: 08.09.1995 (51) IntCl6: E21C 31/02 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 177338 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (2 1) Numer zgłoszenia: 310370 (22) Data zgłoszenia: 08.09.1995 (51) IntCl6: E21C 31/02 F16H
ĆWICZENIE NR OBRÓBKA UZĘBIENIA W WALCOWYM KOLE ZĘBATYM O UZĘBIENIU ZEWNĘTRZNYM, EWOLWENTOWYM, O ZĘBACH PROSTYCH, NA FREZARCE OBWIEDNIOWEJ
 ĆWICZENIE NR 6. 6. OBRÓBKA UZĘBIENIA W WALCOWYM KOLE ZĘBATYM O UZĘBIENIU ZEWNĘTRZNYM, EWOLWENTOWYM, O ZĘBACH PROSTYCH, NA FREZARCE OBWIEDNIOWEJ 6.1. Zadanie technologiczne Dla zadanego rysunkiem wykonawczym
ĆWICZENIE NR 6. 6. OBRÓBKA UZĘBIENIA W WALCOWYM KOLE ZĘBATYM O UZĘBIENIU ZEWNĘTRZNYM, EWOLWENTOWYM, O ZĘBACH PROSTYCH, NA FREZARCE OBWIEDNIOWEJ 6.1. Zadanie technologiczne Dla zadanego rysunkiem wykonawczym
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174823 (13) B1
 OPIS PATENTOWY (19) PL (11) 174823 (13) B1") RZECZPOSPOLITAPOLSKA (12) OPIS PATENTOWY (19) PL (11) 174823 (13) B1 (21) Numer zgłoszenia: 306627 Urząd Patentowy (22) Data zgłoszenia: 29.12.1994 Rzeczypospolitej Polskiej (51)IntCl6: B23B 39/02 B23B
RZECZPOSPOLITAPOLSKA (12) OPIS PATENTOWY (19) PL (11) 174823 (13) B1 (21) Numer zgłoszenia: 306627 Urząd Patentowy (22) Data zgłoszenia: 29.12.1994 Rzeczypospolitej Polskiej (51)IntCl6: B23B 39/02 B23B
Liczba cylindrów 6 6 6
 SILNIK Liczba cylindrów 6 6 6 Typ Poziom emisji Stage IV Stage IV Stage IV Pojemność silnika 6 728 6 728 6 728 Maksymalna moc silnika z systemem zarządzania mocą (KM(KW)) Maksymalna moc silnika (KM (kw))
SILNIK Liczba cylindrów 6 6 6 Typ Poziom emisji Stage IV Stage IV Stage IV Pojemność silnika 6 728 6 728 6 728 Maksymalna moc silnika z systemem zarządzania mocą (KM(KW)) Maksymalna moc silnika (KM (kw))
Stanowisko napędów mechanicznych
 Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229123 (13) B1 (21) Numer zgłoszenia: 411048 (51) Int.Cl. F16H 3/06 (2006.01) F16H 1/16 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229123 (13) B1 (21) Numer zgłoszenia: 411048 (51) Int.Cl. F16H 3/06 (2006.01) F16H 1/16 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
12 > OPIS OCHRONNY PL WZORU UŻYTKOWEGO
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA 12 > OPIS OCHRONNY PL 59958 WZORU UŻYTKOWEGO Yl Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 113763 @ Data zgłoszenia:19.08.1997 Intel7:
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA 12 > OPIS OCHRONNY PL 59958 WZORU UŻYTKOWEGO Yl Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 113763 @ Data zgłoszenia:19.08.1997 Intel7:
Wykorzystano materiały. Układ napędowy - podzespoły. Mechanizm różnicowy. opracowanie mgr inż. Ireneusz Kulczyk
 Wykorzystano materiały Układ napędowy - podzespoły Mechanizm różnicowy opracowanie mgr inż. Ireneusz Kulczyk Zespół Szkół Samochodowych w Bydgoszczy 2011-2012 Mechanizm różnicowy rozdziela równo moment
Wykorzystano materiały Układ napędowy - podzespoły Mechanizm różnicowy opracowanie mgr inż. Ireneusz Kulczyk Zespół Szkół Samochodowych w Bydgoszczy 2011-2012 Mechanizm różnicowy rozdziela równo moment
Projektowanie Systemów Elektromechanicznych. Przekładnie dr inż. G. Kostro
 Projektowanie Systemów Elektromechanicznych Przekłanie r inż. G. Kostro Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie Przekłanie Hyrauliczne: Hyrostatyczne;
Projektowanie Systemów Elektromechanicznych Przekłanie r inż. G. Kostro Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie Przekłanie Hyrauliczne: Hyrostatyczne;
OSIE ELEKTRYCZNE SERII SHAK GANTRY
 OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
(13) B1 F16H 1/16 F16H 57/12
 B1 F16H 1/16 F16H 57/12") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164105 (13) B1 (21) Numer zgłoszenia: 288497 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164105 (13) B1 (21) Numer zgłoszenia: 288497 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
Test sprawdzający Mechanizmy napędowe pojazdów samochodowych (Wg programu nauczania 3808 /SZ/MEN/ )
") SYSTEM OCENY OPARTY NA POMIARZE DYDAKTYCZNYM Zasadnicza Szkoła Zawodowa Specjalność: mechanik pojazdów samochodowych Przedmiot: Budowa samochodów Test sprawdzający Mechanizmy napędowe pojazdów samochodowych
SYSTEM OCENY OPARTY NA POMIARZE DYDAKTYCZNYM Zasadnicza Szkoła Zawodowa Specjalność: mechanik pojazdów samochodowych Przedmiot: Budowa samochodów Test sprawdzający Mechanizmy napędowe pojazdów samochodowych
(13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1. Fig. 1 F16H 1/22 B63H 3/02 F01D 7/02. (73) Uprawniony z patentu:
 B1 (12) OPIS PATENTOWY (19) PL (11) PL B1. Fig. 1 F16H 1/22 B63H 3/02 F01D 7/02. (73) Uprawniony z patentu:") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 184780 (13) B1 (2 1) Numer zgłoszenia: 323265 (22) Data zgłoszenia: 19.11.1997 (51) IntCl7 F16H 1/22 B63H
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 184780 (13) B1 (2 1) Numer zgłoszenia: 323265 (22) Data zgłoszenia: 19.11.1997 (51) IntCl7 F16H 1/22 B63H
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Rozróżnia proste przypadki obciążeń elementów konstrukcyjnych
 roces projektowania części maszyn Wpisany przez iotr ustelny Moduł: roces projektowania części maszyn Typ szkoły: Technikum Jednostka modułowa C rojektowanie połączeń rozłącznych i nierozłącznych Zna ogólne
roces projektowania części maszyn Wpisany przez iotr ustelny Moduł: roces projektowania części maszyn Typ szkoły: Technikum Jednostka modułowa C rojektowanie połączeń rozłącznych i nierozłącznych Zna ogólne
PL B1. OSTROWSKI LESZEK, Gdańsk-Wrzeszcz, PL OSTROWSKI STANISŁAW, Gdańsk-Wrzeszcz, PL BUP 26/10
 PL 213042 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213042 (13) B1 (21) Numer zgłoszenia: 388240 (51) Int.Cl. F02D 15/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 213042 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213042 (13) B1 (21) Numer zgłoszenia: 388240 (51) Int.Cl. F02D 15/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Teoria maszyn mechanizmów
 Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
(19) PL (11) 181278 (13) B3 (12) OPIS PATENTOWY PL 181278 B3. (54) Trochoidalna dwumimośrodowa przekładnia kulkowa F16H 1/32
 PL (11) 181278 (13) B3 (12) OPIS PATENTOWY PL 181278 B3. (54) Trochoidalna dwumimośrodowa przekładnia kulkowa F16H 1/32") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (2 1) Numer zgłoszenia: 317553 (22) Data zgłoszenia: 18.12.1996 (61) Patent dodatkowy do patentu: 174534, 08.07.1994
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (2 1) Numer zgłoszenia: 317553 (22) Data zgłoszenia: 18.12.1996 (61) Patent dodatkowy do patentu: 174534, 08.07.1994
PROJEKTOWANIE MECHATRONICZNE UKŁADY PRZENIESIENIA NAPĘDU
 PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl UKŁADY PRZENIESIENIA NAPĘDU Przekładnie mechaniczne są zwykle
PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl UKŁADY PRZENIESIENIA NAPĘDU Przekładnie mechaniczne są zwykle
(12) OPIS PATENTOWY. (54)Uniwersalny moduł obrotowo-podziałowy
 OPIS PATENTOWY. (54)Uniwersalny moduł obrotowo-podziałowy") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160463 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 283098 (22) Data zgłoszenia: 28.12.1989 B23Q (51)IntCl5: 16/06 (54)Uniwersalny
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160463 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 283098 (22) Data zgłoszenia: 28.12.1989 B23Q (51)IntCl5: 16/06 (54)Uniwersalny
Konfiguracja układów napędowych. Opracował: Robert Urbanik Zespół Szkół Mechanicznych w Opolu
 Konfiguracja układów napędowych Opracował: Robert Urbanik Zespół Szkół Mechanicznych w Opolu Ogólna klasyfikacja układów napędowych Koła napędzane Typ układu Opis Przednie Przedni zblokowany Silnik i wszystkie
Konfiguracja układów napędowych Opracował: Robert Urbanik Zespół Szkół Mechanicznych w Opolu Ogólna klasyfikacja układów napędowych Koła napędzane Typ układu Opis Przednie Przedni zblokowany Silnik i wszystkie
Z-ETI-1027 Mechanika techniczna II Technical mechanics II. Stacjonarne. Katedra Inżynierii Produkcji Dr inż. Stanisław Wójcik
 Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Z-ETI-1027 Mechanika
Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Z-ETI-1027 Mechanika
(73) Uprawniony z patentu: (43) Zgłoszenie ogłoszono: Wyższa Szkoła Inżynierska, Koszalin, PL
 Uprawniony z patentu: (43) Zgłoszenie ogłoszono: Wyższa Szkoła Inżynierska, Koszalin, PL") RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)164102 (13) B1 (21) N um er zgłoszenia: 288495 Urząd Patentowy (22) D ata zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)164102 (13) B1 (21) N um er zgłoszenia: 288495 Urząd Patentowy (22) D ata zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
Przekładnia obiegowa jako podzespół mechanizmu napędowego w środkach transportu
 WYSMULSKI Paweł 1 FALKOWICZ Katarzyna 1 RÓŻYŁO Patryk 1 Przekładnia obiegowa jako podzespół mechanizmu napędowego w środkach transportu WSTĘP Przekładnie obiegowe w porównaniu z przekładniami zwykłymi
WYSMULSKI Paweł 1 FALKOWICZ Katarzyna 1 RÓŻYŁO Patryk 1 Przekładnia obiegowa jako podzespół mechanizmu napędowego w środkach transportu WSTĘP Przekładnie obiegowe w porównaniu z przekładniami zwykłymi
Przenośniki Układy napędowe
 Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
Dobór sprzęgieł hydrokinetycznych 179 Bibliografia 183
 Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
3. Wstępny dobór parametrów przekładni stałej
 4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
TEORIA MASZYN I MECHANIZMÓW ĆWICZENIA LABORATORYJNE
 MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 5 str. 1 MiBM TMiM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN I
MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 5 str. 1 MiBM TMiM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN I
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
35 KM, 4x4, kg
 35 KM, 4x4, 1 100 kg SIŁA - sztywna rama ze skrętnymi kołami wahliwej osi przedniej. - Silnik włoskiej marki LOMBARDINI, 4 cylindrowy o mocy 35 KM KOMFORT - wygodne z łatwą regulacją siedzenie operatora,
35 KM, 4x4, 1 100 kg SIŁA - sztywna rama ze skrętnymi kołami wahliwej osi przedniej. - Silnik włoskiej marki LOMBARDINI, 4 cylindrowy o mocy 35 KM KOMFORT - wygodne z łatwą regulacją siedzenie operatora,
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
DOKUMENTACJA TECHNICZNO - RUCHOWA
 DOKUMENTACJA TECHNICZNO - RUCHOWA Opis techniczny 1.1. Przeznaczenie urządzenia W skład motoreduktora wchodzi silnik elektryczny i przekładnia różnicowa. Zadaniem przekładni różnicowej jest zmiana momentu
DOKUMENTACJA TECHNICZNO - RUCHOWA Opis techniczny 1.1. Przeznaczenie urządzenia W skład motoreduktora wchodzi silnik elektryczny i przekładnia różnicowa. Zadaniem przekładni różnicowej jest zmiana momentu
Środowiskowe Studium Doktoranckie przy Wydz. Mechanicznym Politechniki Gdańskiej, Gdańsk, ul. Narutowicza 11/12,
 RAFAŁ GAWARKIEWICZ 1, FILIP WASILCZUK 2, MICHAŁ WASILCZUK 3 1 Politechnika Gdańska, Wydział Mechaniczny, 80-233 Gdańsk, ul. Narutowicza 11/12, gawar@pg.gda.pl 2 Środowiskowe Studium Doktoranckie przy Wydz.
RAFAŁ GAWARKIEWICZ 1, FILIP WASILCZUK 2, MICHAŁ WASILCZUK 3 1 Politechnika Gdańska, Wydział Mechaniczny, 80-233 Gdańsk, ul. Narutowicza 11/12, gawar@pg.gda.pl 2 Środowiskowe Studium Doktoranckie przy Wydz.
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
WIRTUALNY PROJEKT PRZEKŁADNI GŁÓWNEJ ŚMIGŁOWCA Z WYKORZYSTANIEM MODELI AUTOGENERUJACYCH
 Mateusz Kania 1), Mirosław Ferdynus 2) WIRTUALNY PROJEKT PRZEKŁADNI GŁÓWNEJ ŚMIGŁOWCA Z WYKORZYSTANIEM MODELI AUTOGENERUJACYCH Streszczenie: W pracy zaprezentowano projekt przekładni głównej śmigłowca
Mateusz Kania 1), Mirosław Ferdynus 2) WIRTUALNY PROJEKT PRZEKŁADNI GŁÓWNEJ ŚMIGŁOWCA Z WYKORZYSTANIEM MODELI AUTOGENERUJACYCH Streszczenie: W pracy zaprezentowano projekt przekładni głównej śmigłowca