Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne
|
|
|
- Sławomir Woźniak
- 6 lat temu
- Przeglądów:
Transkrypt

1
2 Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne Krajczyński Edward Urządzenia nawigacji technicznej Fransiszek Wróbel Vademecum nawigatora
3 Plan prezentacji: Wprowadzenie Korzyści płynące z wykorzystania autopilotów Sterowność statku Zaburzenia powodujące odchylanie się statku z kursu Sterowanie kursem Budowa i zasada działania układu sterowania statkiem Schemat blokowy układu Zasada działania, regulator PID Najczęściej spotykane parametry podlegające regulacji Ogólne zasady doboru parametrów Wymogi IMO

4 Wprowadzenie Autopilot urządzenie służące do wykonywania określonego zestawu zadań umożliwiających automatyczne sterowanie statkiem Wymagania stawiane autopilotom: Utrzymanie statku na kursie w sposób optymalny Optymalna praca przy zmianach kursu wprowadzenie statku na nowy kurs szybko i bez przeregulowań
5 Właściwości autopilotów: Znaczna bezwładność regulowanego obiektu zależna od stanu załadowania, prędkości statku, zanurzenia, itd. Szczególnie mała prędkość działania steru, złożona zależność momentu na płetwie sterowej w funkcji kąta jej wychylenia, niesymetryczne przebiegi przy wychyleniach i powrotach steru Różnorodny charakter zewnętrznych oddziaływań na statek (zakłócenia środowiskowe) związanych z działaniem na kadłub statku prądów wody, wiatru itd. Złożone warunki eksploatacyjne układów regulacji znajdujących się na statku, od których wymaga się sprawnej, bezawaryjnej pracy w różnorodnych warunkach środowiskowych
6 Korzyści płynące z zastosowania autopilotów: Wzrost średniej prędkości statku Oszczędności w eksploatacji statku Skrócenie czasu rejsu Zmniejszenie zużycia paliwa Automatyczne sterowanie pozwala w porównaniu do sterowania ręcznego na zmniejszenie liczby i rozmiaru wychyleń steru. Dzięki temu uzyskuje się wzrost średniej prędkości statku, a więc oszczędności w jego eksploatacji. Obecnie pełnomorskie statki sterowane są ręcznie w zasadzie tylko podczas manewrowania, przejścia przez kanały i cieśniny oraz w czasie wyjątkowo ciężkiej, sztormowej pogody.
7 Sterowność statku Bardzo ważną cechą statku wynikającą z jego właściwości dynamicznych jest stateczność kursowa oraz zwrotność: Statek stateczny kursowo to taki, który przy sterze leżącym w płaszczyźnie diametralnej, po odchyleniu się statku od kursu na skutek wpływu czynników zewnętrznych, kontynuuje ruch po nowym kursie. Statek niestateczny kursowo, raz odchylony od kursu, z czasem zwiększa to odchylenie. Sterowanie statkiem niestatecznym kursowo jest bardzo trudne i uciążliwe. Zwrotność statku jest cechą określającą zdolność reakcji statku na wychylenie steru. Statki zwrotne posiadają mniejszą średnicę cyrkulacji.
8 Sterowność statku Zdolność manewrowa statku określana jest na podstawie próby spiralnej, dzięki której uzyskuje się krzywe dynamicznej stateczności sterowej statku (krzywe Dieudonne a). Próba spiralna polega na wykreśleniu zależności ustalonej prędkości obrotowej statku w funkcji wychylenia steru na lewą i prawą burtę przy ustalonej prędkości początkowej statku. Dokonuje się tego podczas wykonywania cyrkulacji statku dla kilku wybranych prędkości. Wyniki tej próby są podstawą do obliczenia bezwymiarowego współczynnika stateczności kursowej oraz bezwymiarowego współczynnika zwrotności.
9 Bezwymiarowy współczynnik stateczności kursowej: t m E = V o L p gdzie: V o prędkość początkowa statku przy próbie A,Kempfa t m średni czas wykonania jednego cyklu próby A.Kempfa L p długość statku między pionami Bezwymiarowy współczynnik zwrotności: K = D u L p gdzie: D u ustalona średnica cyrkulacji statku
10 Znajomość wskaźników E i K umożliwia określenie liczby Nomoto, którą wyraża stosunek: n = K E Liczba Nomoto umożliwia dokonanie analizy własności manewrowych statku. Minimalna wartość liczby Nomoto dla średni zwrotnego i stabilnego kursowo statku wynosi 0,45. Zwiększona wartość liczby Nomoto świadczy o dobrej zwrotności statku przy zmniejszonej stateczności kursowej, zaś zmiejszona wartość o dobrej stateczności kursowej, lecz zmniejszonej zdolności manewrowej
11 Przyczyny odchylania się statku od kursu: Zaburzenia o charakterze ciągłym Statyczne działanie wiatru Przechyły statku Działanie śruby Zaburzenia o charakterze doraźnym Oddziaływanie fali na statek Praca steru
12 Wiatr:

13 Wiatr:
14 Falowanie: Oddziaływanie dynamiczne fali na statek przejawia się w uderzeniach fali o burty statku, powodując doraźne odchylenia statku w obydwu kierunkach, zwane potocznie myszkowaniem statku (z ang. yaw). Przy różnych kątach ułożenia kadłuba statku w stosunku do fali, zmienia się amplituda oraz częstotliwość siły wymuszającej myszkowanie.
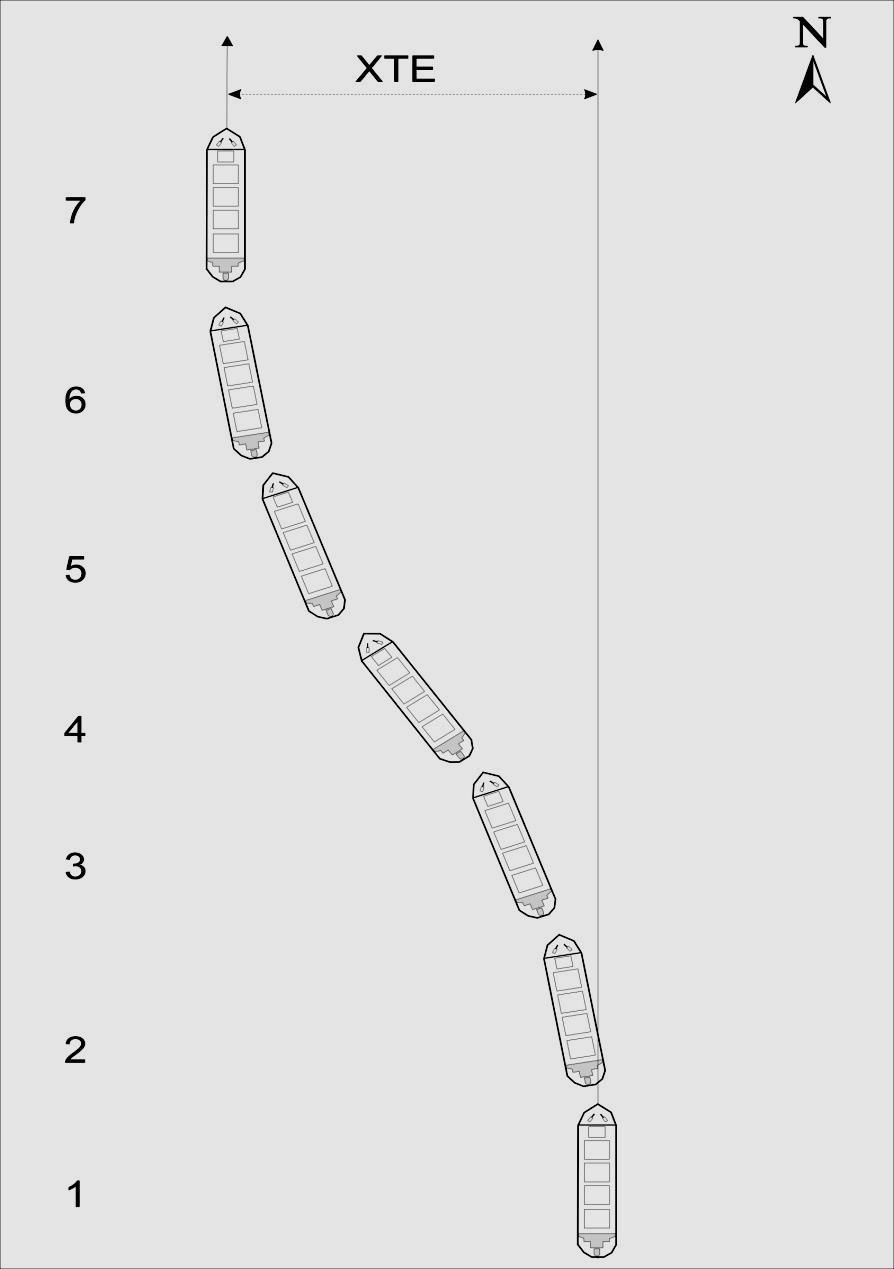
15 Sterowanie kursem Położenie 1: statek podąża wyznaczonym kursem. Położenie 2: na skutek oddziaływania czynników zewnętrznych (prąd, wiatr) lub wewnętrznych (przechył boczny, praca śruby) odchyla się od wyznaczonego kursu. Ze względu na małą wartości odchylenia statku, ster nie zostaje uruchomiony. Położenie 3: statek nadal odchyla się od kursu, jego prędkość kątowa obrotu wzrasta, sternik reaguje na taką sytuację wychylając ster na burtę przeciwną do obrotu. Położenie 4: mimo wychylonego steru, statek nadal zwiększa kąt odchylenia od kursu, sternik równocześnie zwiększa wychylenie steru, prędkość kątowa obrotu statku spada do zera i statek zaczyna wykazywać tendencje do obrotu w drugą stronę, powracając tym samym na poprzedni kurs. Położenie 5: w związku z tendencją do powrotu na kurs wychylenie steru zostaje zmniejszone. Położenie 6: statek dochodzi do kursu. Mimo iż statek nie znajduje się jeszcze na kursie to płetwa sterowa powraca w położenie środkowe (midship). Położenie 7: statek na skutek inercji samodzielnie dochodzi do wyznaczonego kursu.
16 Sterowanie kursem
17 KR a KDd
18 Budowa: W celu uzyskania kontroli nad systemem (statek), należy zastosować układ regulacji, który będzie określał wpływ sygnału v(t) na sygnał wyjścia y(t) oraz na podstawie porównania sygnałów u(t) i y(t) będzie wypracowywał decyzję. Statek jako obiekt sterowania składa się z następujących bloków: bloku sterowania, którym jest autopilot, bloku maszyny sterowej jako członu wykonawczego, bloku sprzężenia zwrotnego, bloku lokalnego sprzężenie zwrotnego, pełniącego rolę pomocniczą, zwiększając stabilność całego układu.

19 Budowa: KR = = KR - KR z
20 Zasada działania: 1. Na skutek działania zakłóceń lub niesymetrii hydrodynamicznej pojawia się odchyłka kursowa (uchyb kursowy). 2. Uchyb wyliczany jest w węźle sumującym. 3. Blok sterowania wytwarza sygnał sterujący powodujący wychylenie steru odpowiadające danemu uchybowi 4. Maszyna sterowa zmienia wychylenie płetwy sterowej 5. Statek zmienia kurs
21 Zasada działania: Regulator urządzenie, które porównuje sygnał przychodzący z urządzenia pomiarowego z wartością zadaną i w zależności od tej różnicy działa na urządzenie wykonawcze w takim kierunku, aby tę różnicę zmniejszyć Regulatory stosowane w autopilotach morskich, są najczęściej typu adaptacyjnego. Regulatory adaptacyjne, to takie, których własności dynamiczne są optymalizowane przez automatyczne dostosowanie się warunków pracy obiektu. Adaptacja dotyczy tu nastrajania parametrów regulatora, zawierającego tor adaptacji, do zmiennych parametrów statku jako obiektu sterowania.
22 Zasada działania: α = Aθ + B න 0 t θdt + C dθ dt
23 Zasada działania: α = Aθ + B න 0 t θdt + C dθ dt Składowa proporcjonalna P uwzględnia odchylenia statku od kursu, przy czym we wszystkich typach autopilotów działanie członu P nie jest ściśle proporcjonalne do tych odchyleń. Istnieje w nim strefa martwa, dopuszczająca myszkowanie statku (z ang. yaw) w określonym kącie bez uruchamiania urządzenia sterowego.
24 Zasada działania: α = Aθ + B න 0 t θdt + C dθ dt Składowa różniczkująca D tego regulatora uwzględnia prędkość odchylania się statku od kursu i powoduje odpowiednie wyprzedzenie ruchu steru w stosunku do ruchu statku. Wyrażenie jest prędkością kątową odchylania się statku od kursu.
25 Zasada działania: α = Aθ + B න 0 t θdt + C dθ dt Składowa całkująca I uwzględnia wielkość czynników będących przyczyną stałego odchylania statku od kursu. Całka obliczana za określony czas dt, jest sumą powierzchni, wyznaczonych przez krzywą kąta odchylenia statku od kursu w funkcji czasu. Jeśli suma powierzchni powyżej osi czasu (odchylenia w lewo) jest równa sumie powierzchni poniżej osi czasu (odchylenia w prawo), to całka ma wartość zero i sygnał członu I równa się zero. Jeśli sumy powierzchni wynikających z odchyleń w lewo i w prawo nie są sobie równe, to całka ma określoną wartość i człon I podaje do układu regulacyjnego sygnał, który powoduje odpowiednie stałe wychylenie steru.
26 Regulacja: Najczęściej spotykane parametry podlegające regulacji: Współczynnik wzmocnienia (rudder) wpływa na wartość kąta wychylenia steru oraz czas pozostawania płetwy sterowej w wychyleniu skrajnym. Czułość (yaw) powoduje zmianę strefy martwej regulatora, związanej z myszkowaniem statku. Współczynnik całkowania (trim) wpływa na zakres stałego, automatycznego wychylenia steru. Tłumienie powoduje zmianę wartości współczynnika wagowego członu D Ograniczenie wychylenia steru pozwala na ograniczenie maksymalnego kąta wychylenia płetwy sterowej podczas pełnej prędkości statku w czasie automatycznej pracy urządzenia sterowego.
27 Regulacja: Ogólne zasady doboru parametrów regulacyjnych autopilota: Przy spokojnym morzu nastawę czułość (yaw) należy ustawić na wartość minimalną, tak aby ograniczyć strefę martwą statku Przy średnich stanach morza strefę martwą (czułość) należy stosunkowo zwiększać, natomiast tłumienie ustawić tak, aby statek oscylował możliwie blisko wyznaczonego kursu średniego Przy wysokich stanach morza wartości tłumienia oraz czułości należy ustawić na poziomie minimalnym W przypadku fali nadążającej, czyli fali z kierunku rufy, należy zdecydowanie zwiększyć wartość współczynnika wzmocnienia (rudder)
28 Regulacja: W autonomicznych autopilotach adaptacyjnych odpowiedź realizowana jest na podstawie analizy jakości utrzymywania statku na kursie według obserwowanych lub modelowanych sygnałów wyjściowych samego układu sterowania. W nieautonomicznych autopilotach adaptacyjnych wykorzystywane są wcześniej ustalane zależności jakości sterowania od warunków zewnętrznych (zapasu wody pod stępką, prędkości, falowania). Autopilot łącząc się z odpowiednimi czujnikami (echosondą, logiem, miernikami kołysań) otrzymuje informacje o warunkach zewnętrznych, przy ich zmianie parametry sterowania przestrajają się automatycznie w celu uzyskania żądanej jakości utrzymywania statku na kursie.
FRAGMENTY KSIĄŻKI PT.: URZĄDZENIA NAWIGACJI TECHNICZNEJ. Maciej Gucma. Jakub Montewka. Antoni Zieziula
 FUNDACJA ROZWOJU AKADEMII MORSKIEJ W SZCZECINIE FRAGMENTY KSIĄŻKI PT.: URZĄDZENIA NAWIGACJI TECHNICZNEJ autorstwa: Maciej Gucma Jakub Montewka Antoni Zieziula Szczecin 2005 Rozdział 3, Automatyczne sterowanie
FUNDACJA ROZWOJU AKADEMII MORSKIEJ W SZCZECINIE FRAGMENTY KSIĄŻKI PT.: URZĄDZENIA NAWIGACJI TECHNICZNEJ autorstwa: Maciej Gucma Jakub Montewka Antoni Zieziula Szczecin 2005 Rozdział 3, Automatyczne sterowanie
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 6 Regulacja autopilotów Szczecin 2006 http://irm.am.szczecin.pl w dziale dydaktyka / Urządzenia
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 6 Regulacja autopilotów Szczecin 2006 http://irm.am.szczecin.pl w dziale dydaktyka / Urządzenia
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 6 Regulacja autopilotów Szczecin 2010 http://irm.am.szczecin.pl zawsze najnowsza wersja tego
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 6 Regulacja autopilotów Szczecin 2010 http://irm.am.szczecin.pl zawsze najnowsza wersja tego
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Rys. 1 Otwarty układ regulacji
 Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Regulacja dwupołożeniowa (dwustawna)
") Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Dla naszego obiektu ciągłego: przy czasie próbkowania T p =2.
 1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa.
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Podstawy Automatyzacji Okrętu
 Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, specjalności okrętowe Podstawy Automatyzacji Okrętu 1 WPROWADZENIE M. H. Ghaemi Luty 2018 Podstawy automatyzacji
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, specjalności okrętowe Podstawy Automatyzacji Okrętu 1 WPROWADZENIE M. H. Ghaemi Luty 2018 Podstawy automatyzacji
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Transport. Luty 2015. Automatyzacja statku 1.
 Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Transport Automatyzacja statku 1 WPROWADZENIE M. H. Ghaemi Luty 2015 Automatyzacja statku 1. Wprowadzenie 1 Kierunek:
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Transport Automatyzacja statku 1 WPROWADZENIE M. H. Ghaemi Luty 2015 Automatyzacja statku 1. Wprowadzenie 1 Kierunek:
II. STEROWANIE I REGULACJA AUTOMATYCZNA
 II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Dobór parametrów regulatora - symulacja komputerowa. Najprostszy układ automatycznej regulacji można przedstawić za pomocą
 Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
4. Właściwości eksploatacyjne układów regulacji Wprowadzenie. Hs () Ys () Ws () Es () Go () s. Vs ()
 Ys () Ws () Es () Go () s. Vs ()") 4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Przedmowa 12 Od wydawcy 15 Wykaz ważniejszych oznaczeń 16
 Spis treści Przedmowa 12 Od wydawcy 15 Wykaz ważniejszych oznaczeń 16 Rozdział 1. WPROWADZENIE 19 1.1. Porównanie stopnia trudności manewrowania statkami morskimi z kierowaniem innymi środkami transportu
Spis treści Przedmowa 12 Od wydawcy 15 Wykaz ważniejszych oznaczeń 16 Rozdział 1. WPROWADZENIE 19 1.1. Porównanie stopnia trudności manewrowania statkami morskimi z kierowaniem innymi środkami transportu
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Marzec Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Oceanotechnika, ZiMwGM
 Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Oceanotechnika, ZiMwGM Podstawy automatyzacji okrętu 1 WPROWADZENIE M. H. Ghaemi Marzec 2016 Podstawy automatyzacji
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Oceanotechnika, ZiMwGM Podstawy automatyzacji okrętu 1 WPROWADZENIE M. H. Ghaemi Marzec 2016 Podstawy automatyzacji
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Automatyka i sterowanie w gazownictwie. Regulatory w układach regulacji
 Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
WYDZIAŁ ELEKTRYCZNY KATEDRA AUTOMATYKI I ELEKTRONIKI. Badanie układu regulacji dwustawnej
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
STEROWANIE MASZYN I URZĄDZEŃ I. Laboratorium. 8. Układy ciągłe. Regulator PID
 STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
SIMATIC S Regulator PID w sterowaniu procesami. dr inż. Damian Cetnarowicz. Plan wykładu. I n t e l i g e n t n e s y s t e m y z e
 Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Automatyzacja. Ćwiczenie 9. Transformata Laplace a sygnałów w układach automatycznej regulacji
 Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Elementy układu automatycznej regulacji (UAR)
") 1 Elementy układu automatycznej regulacji (UAR) Wprowadzenie W naszej szkole, specjalizacją w klasie elektronicznej jest automatyka przemysłowa. Niniejszy artykuł ma na celu przedstawienie czytelnikom
1 Elementy układu automatycznej regulacji (UAR) Wprowadzenie W naszej szkole, specjalizacją w klasie elektronicznej jest automatyka przemysłowa. Niniejszy artykuł ma na celu przedstawienie czytelnikom
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ
 REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ 1 1. Zadania regulatorów w układach regulacji automatycznej Do podstawowych zadań regulatorów w układach regulacji automatycznej należą: porównywanie wartości
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ 1 1. Zadania regulatorów w układach regulacji automatycznej Do podstawowych zadań regulatorów w układach regulacji automatycznej należą: porównywanie wartości
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Ogólny schemat blokowy układu ze sprzężeniem zwrotnym
 1. Definicja sprzężenia zwrotnego Sprzężenie zwrotne w układach elektronicznych polega na doprowadzeniu części sygnału wyjściowego z powrotem do wejścia. Częśd sygnału wyjściowego, zwana sygnałem zwrotnym,
1. Definicja sprzężenia zwrotnego Sprzężenie zwrotne w układach elektronicznych polega na doprowadzeniu części sygnału wyjściowego z powrotem do wejścia. Częśd sygnału wyjściowego, zwana sygnałem zwrotnym,
BADANIE SILNIKA SKOKOWEGO
 Politechnika Warszawska Instytut Maszyn Elektrycznych Laboratorium Maszyn Elektrycznych Malej Mocy BADANIE SILNIKA SKOKOWEGO Warszawa 00. 1. STANOWISKO I UKŁAD POMIAROWY. W skład stanowiska pomiarowego
Politechnika Warszawska Instytut Maszyn Elektrycznych Laboratorium Maszyn Elektrycznych Malej Mocy BADANIE SILNIKA SKOKOWEGO Warszawa 00. 1. STANOWISKO I UKŁAD POMIAROWY. W skład stanowiska pomiarowego
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 1. Dobór rodzaju i nastaw regulatorów PID Rodzaje regulatorów 2 Regulatory dwustawne (2P)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 1. Dobór rodzaju i nastaw regulatorów PID Rodzaje regulatorów 2 Regulatory dwustawne (2P)
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7
 Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne
 Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne Krajczyński Edward Urządzenia nawigacji technicznej Franciszek
Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne Krajczyński Edward Urządzenia nawigacji technicznej Franciszek
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
CEL PRZEDMIOTU. Zapoznanie z podstawowym układem sił i momentów działających na statek w ruchu.
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: MANEWROWANIE JEDNOSTKĄ PŁYWAJACĄ. Kod przedmiotu: Xp. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego 4. Kierunek: Nawigacja 5. Specjalność: Wszystkie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: MANEWROWANIE JEDNOSTKĄ PŁYWAJACĄ. Kod przedmiotu: Xp. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego 4. Kierunek: Nawigacja 5. Specjalność: Wszystkie
Ćwiczenie 2a. Pomiar napięcia z izolacją galwaniczną Doświadczalne badania charakterystyk układów pomiarowych CZUJNIKI POMIAROWE I ELEMENTY WYKONAWCZE
 Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
PL B1. Sposób i układ tłumienia oscylacji filtra wejściowego w napędach z przekształtnikami impulsowymi lub falownikami napięcia
 PL 215269 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 215269 (13) B1 (21) Numer zgłoszenia: 385759 (51) Int.Cl. H02M 1/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 215269 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 215269 (13) B1 (21) Numer zgłoszenia: 385759 (51) Int.Cl. H02M 1/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
PUBLIKACJA INFORMACYJNA NR 22/I METODA OBLICZANIA I OCENY STATECZNOŚCI STATKU NA FALI NADĄŻAJĄCEJ
 PUBLIKACJA INFORMACYJNA NR 22/I METODA OBLICZANIA I OCENY STATECZNOŚCI STATKU NA FALI NADĄŻAJĄCEJ 2003 Publikacje I (Informacyjne) wydawane przez Polski Rejestr Statków mają charakter instrukcji lub wyjaśnień
PUBLIKACJA INFORMACYJNA NR 22/I METODA OBLICZANIA I OCENY STATECZNOŚCI STATKU NA FALI NADĄŻAJĄCEJ 2003 Publikacje I (Informacyjne) wydawane przez Polski Rejestr Statków mają charakter instrukcji lub wyjaśnień
11. Dobór rodzaju, algorytmu i nastaw regulatora
 205 11. Dobór rodzaju, algorytmu i nastaw regulatora 11.1 Wybór rodzaju i algorytmu regulatora Poprawny wybór rodzaju regulatora i jego algorytmu uzależniony jest od znajomości (choćby przybliżonej) właściwości
205 11. Dobór rodzaju, algorytmu i nastaw regulatora 11.1 Wybór rodzaju i algorytmu regulatora Poprawny wybór rodzaju regulatora i jego algorytmu uzależniony jest od znajomości (choćby przybliżonej) właściwości
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Regulacja prędkości posuwu belki na prowadnicach pionowych przy wykorzystaniu sterownika Versa Max
 Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
KLASYFIKACJI I BUDOWY STATKÓW MORSKICH ZMIANY NR 2/2008
 PRZEPISY KLASYFIKACJI I BUDOWY STATKÓW MORSKICH ZMIANY NR 2/2008 do CZĘŚCI III WYPOSAśENIE KADŁUBOWE 2007 Gdańsk Zmiany Nr 2/2008 do Części III WyposaŜenie kadłubowe 2007, Przepisów klasyfikacji i budowy
PRZEPISY KLASYFIKACJI I BUDOWY STATKÓW MORSKICH ZMIANY NR 2/2008 do CZĘŚCI III WYPOSAśENIE KADŁUBOWE 2007 Gdańsk Zmiany Nr 2/2008 do Części III WyposaŜenie kadłubowe 2007, Przepisów klasyfikacji i budowy
Regulator P (proporcjonalny)
") Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
PAiTM. materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż.
 PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
UNIKANIE NIEBEZPIECZNYCH SYTUACJI W ZŁYCH WARUNKACH POGODOWYCH W RUCHU STATKU NA FALI NADĄŻAJĄCEJ
 MIROSŁAW JURDZIŃSKI Akademia Morska w Gdyni Katedra Nawigacji UNIKANIE NIEBEZPIECZNYCH SYTUACJI W ZŁYCH WARUNKACH POGODOWYCH W RUCHU STATKU NA FALI NADĄŻAJĄCEJ Podstawową zasadą planowania nawigacji jest
MIROSŁAW JURDZIŃSKI Akademia Morska w Gdyni Katedra Nawigacji UNIKANIE NIEBEZPIECZNYCH SYTUACJI W ZŁYCH WARUNKACH POGODOWYCH W RUCHU STATKU NA FALI NADĄŻAJĄCEJ Podstawową zasadą planowania nawigacji jest
Konfiguracja zdalna i sterowanie za pomocą Bluetooth (Android) http://www.basecamelectronics.com/
 http://www.basecamelectronics.com/") Konfiguracja zdalna i sterowanie za pomocą Bluetooth (Android) http://www.basecamelectronics.com/ Basecam simplebgc przewodnik konfiguracji regulatora https://play.google.com/store/apps/details?id=ru.smartsoft.simplebgc
Konfiguracja zdalna i sterowanie za pomocą Bluetooth (Android) http://www.basecamelectronics.com/ Basecam simplebgc przewodnik konfiguracji regulatora https://play.google.com/store/apps/details?id=ru.smartsoft.simplebgc
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 176342 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 308646 (22) Data zgłoszenia: 14.05.1995 (51) IntCl6: F01K 13/02 (54)Sposób
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 176342 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 308646 (22) Data zgłoszenia: 14.05.1995 (51) IntCl6: F01K 13/02 (54)Sposób
Podział regulatorów: I. Regulatory elektroniczne: II. Regulatory bezpośredniego działania: III. Regulatory dwustawne i trójstawne:
 REGULATORY CK68 Nie można wyświetlić połączonego obrazu. Plik mógł zostać przeniesiony lub usunięty albo zmieniono jego nazwę. Sprawdź, czy łącze wskazuje poprawny plik i lokalizację. Zadania regulatorów
REGULATORY CK68 Nie można wyświetlić połączonego obrazu. Plik mógł zostać przeniesiony lub usunięty albo zmieniono jego nazwę. Sprawdź, czy łącze wskazuje poprawny plik i lokalizację. Zadania regulatorów
PL B1. Sposób i układ sterowania przemiennika częstotliwości z falownikiem prądu zasilającego silnik indukcyjny
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
Ćwiczenie 2: pomiar charakterystyk i częstotliwości granicznych wzmacniacza napięcia REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU
 REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U LABORATORIUM pomiarów elektronicznych UKŁADÓW ANALOGOWYCH Ćwiczenie 2: pomiar charakterystyk i częstotliwości granicznych wzmacniacza
REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U LABORATORIUM pomiarów elektronicznych UKŁADÓW ANALOGOWYCH Ćwiczenie 2: pomiar charakterystyk i częstotliwości granicznych wzmacniacza
Wymiary akwenu w płaszczyźnie pionowej bezpieczna głębokość podawana zazwyczaj w postaci stosunku minimalnej rezerwy wody pod kilem do zanurzenia
 IRM wykład 2 Parametry Wymiary akwenu w płaszczyźnie pionowej bezpieczna głębokość podawana zazwyczaj w postaci stosunku minimalnej rezerwy wody pod kilem do zanurzenia maksymalnego statku /T. Wymiary
IRM wykład 2 Parametry Wymiary akwenu w płaszczyźnie pionowej bezpieczna głębokość podawana zazwyczaj w postaci stosunku minimalnej rezerwy wody pod kilem do zanurzenia maksymalnego statku /T. Wymiary
Wykład nr 1 Podstawowe pojęcia automatyki
 Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Serwomechanizmy sterowanie
 Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK
 Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
(13)B3 (12) OPIS PATENTOWY (19) PL (11)
B3 (12) OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA (13)B3 (12) OPIS PATENTOWY (19) PL (11) 176704 (21) Numer zgłoszenia: 308623 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 15.05.1995 (61) Patent dodatkowy do patentu:
RZECZPOSPOLITA POLSKA (13)B3 (12) OPIS PATENTOWY (19) PL (11) 176704 (21) Numer zgłoszenia: 308623 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 15.05.1995 (61) Patent dodatkowy do patentu:
MANEWR OSTATNIEJ CHWILI OCENA I ANALIZA DLA MASOWCA W ZALEŻNOŚCI OD ODLEGŁOŚCI ROZPOCZĘCIA MANEWRU I KĄTA KURSOWEGO
 STANISŁAW GÓRSKI PIOTR LIZAKOWSKI ARKADIUSZ ŁUKASZEWICZ Akademia Morska w Gdyni Katedra Nawigacji MANEWR OSTATNIEJ CHWILI OCENA I ANALIZA DLA MASOWCA W ZALEŻNOŚCI OD ODLEGŁOŚCI ROZPOCZĘCIA MANEWRU I KĄTA
STANISŁAW GÓRSKI PIOTR LIZAKOWSKI ARKADIUSZ ŁUKASZEWICZ Akademia Morska w Gdyni Katedra Nawigacji MANEWR OSTATNIEJ CHWILI OCENA I ANALIZA DLA MASOWCA W ZALEŻNOŚCI OD ODLEGŁOŚCI ROZPOCZĘCIA MANEWRU I KĄTA
2. Wyznaczenie parametrów dynamicznych obiektu na podstawie odpowiedzi na skok jednostkowy, przy wykorzystaniu metody Küpfmüllera.
 1. Celem projektu jest zaprojektowanie układu regulacji wykorzystującego regulator PI lub regulator PID, dla określonego obiektu składającego się z iloczynu dwóch transmitancji G 1 (s) i G 2 (s). Następnym
1. Celem projektu jest zaprojektowanie układu regulacji wykorzystującego regulator PI lub regulator PID, dla określonego obiektu składającego się z iloczynu dwóch transmitancji G 1 (s) i G 2 (s). Następnym
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
Spis treści. Dzień 1. I Elementy układu automatycznej regulacji (wersja 1109) II Rodzaje regulatorów i struktur regulacji (wersja 1109)
 II Rodzaje regulatorów i struktur regulacji (wersja 1109)") Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
CZŁOWIEK ZA BURTĄ REKIN!!!
 CZŁOWIEK ZA BURTĄ REKIN!!! mgr inż. kpt.ż.w. Mirosław Wielgosz Trzy możliwe sytuacje: 1. Akcja natychmiastowa. człowiek za burtą został zauważony z mostka i akcja została podjęta natychmiast. 2. Akcja
CZŁOWIEK ZA BURTĄ REKIN!!! mgr inż. kpt.ż.w. Mirosław Wielgosz Trzy możliwe sytuacje: 1. Akcja natychmiastowa. człowiek za burtą został zauważony z mostka i akcja została podjęta natychmiast. 2. Akcja
Laboratorium. Hydrostatyczne Układy Napędowe
 Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr 5 Charakterystyka rozdzielacza hydraulicznego. Opracowanie: Z.Kudźma, P. Osiński J. Rutański, M. Stosiak Wiadomości wstępne Rozdzielacze
Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr 5 Charakterystyka rozdzielacza hydraulicznego. Opracowanie: Z.Kudźma, P. Osiński J. Rutański, M. Stosiak Wiadomości wstępne Rozdzielacze
Układ stabilizacji laserów diodowych
 Układ stabilizacji laserów diodowych Lasery diodowe stabilizowane są do wzorca atomowego z wykorzystaniem metody magnetycznie indukowanego dichroizmu (patrz artykuł Laser frequency stabilization by Dopplerfree
Układ stabilizacji laserów diodowych Lasery diodowe stabilizowane są do wzorca atomowego z wykorzystaniem metody magnetycznie indukowanego dichroizmu (patrz artykuł Laser frequency stabilization by Dopplerfree
BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO
 Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Teoria żeglowania i manewrowania
 Teoria żeglowania i manewrowania 1 Jaki żagiel należy zwiększyć na jachcie zawietrznym, aby go zrównoważyć? a) tylny b) przedni c) środkowy 2 Jak zwiększyć na jachcie nawietrznym zawietrzność, aby go zrównoważyć?
Teoria żeglowania i manewrowania 1 Jaki żagiel należy zwiększyć na jachcie zawietrznym, aby go zrównoważyć? a) tylny b) przedni c) środkowy 2 Jak zwiększyć na jachcie nawietrznym zawietrzność, aby go zrównoważyć?
wiatr rzeczywisty własny pozorny
 wiatr rzeczywisty własny pozorny wiatr rzeczywisty wiatr wywołany warunkami meteorologicznymi i ukształtowaniem terenu, wiatr własny ruch powietrza wynikający z poruszania się jachtu i przeciwny do kierunku
wiatr rzeczywisty własny pozorny wiatr rzeczywisty wiatr wywołany warunkami meteorologicznymi i ukształtowaniem terenu, wiatr własny ruch powietrza wynikający z poruszania się jachtu i przeciwny do kierunku
Generatory przebiegów niesinusoidalnych
 Generatory przebiegów niesinusoidalnych Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Przerzutniki Przerzutniki
Generatory przebiegów niesinusoidalnych Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Przerzutniki Przerzutniki
Zastosowania liniowe wzmacniaczy operacyjnych
 UKŁADY ELEKTRONICZNE Instrukcja do ćwiczeń laboratoryjnych Zastosowania liniowe wzmacniaczy operacyjnych Laboratorium Układów Elektronicznych Poznań 2008 1. Cel i zakres ćwiczenia Celem ćwiczenia jest
UKŁADY ELEKTRONICZNE Instrukcja do ćwiczeń laboratoryjnych Zastosowania liniowe wzmacniaczy operacyjnych Laboratorium Układów Elektronicznych Poznań 2008 1. Cel i zakres ćwiczenia Celem ćwiczenia jest
Wzmacniacz operacyjny
 ELEKTRONIKA CYFROWA SPRAWOZDANIE NR 3 Wzmacniacz operacyjny Grupa 6 Aleksandra Gierut CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniaczy operacyjnych do przetwarzania
ELEKTRONIKA CYFROWA SPRAWOZDANIE NR 3 Wzmacniacz operacyjny Grupa 6 Aleksandra Gierut CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniaczy operacyjnych do przetwarzania
PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa
 Rok akademicki 2015/2016 Semestr letni PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa Wstęp teoretyczny: W układzie regulacji określa
Rok akademicki 2015/2016 Semestr letni PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa Wstęp teoretyczny: W układzie regulacji określa
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
WYDZIAŁ PPT / KATEDRA INŻYNIERII BIOMEDYCZNEJ D-1 LABORATORIUM Z MIERNICTWA I AUTOMATYKI Ćwiczenie nr 7. Badanie jakości regulacji dwupołożeniowej.
 Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Wzmacniacze operacyjne
 Wzmacniacze operacyjne Cel ćwiczenia Celem ćwiczenia jest badanie podstawowych układów pracy wzmacniaczy operacyjnych. Wymagania Wstęp 1. Zasada działania wzmacniacza operacyjnego. 2. Ujemne sprzężenie
Wzmacniacze operacyjne Cel ćwiczenia Celem ćwiczenia jest badanie podstawowych układów pracy wzmacniaczy operacyjnych. Wymagania Wstęp 1. Zasada działania wzmacniacza operacyjnego. 2. Ujemne sprzężenie
LAB-EL LB-760A: regulacja PID i procedura samostrojenia
 Page 1 of 5 Copyright 2003-2010 LAB-EL Elektronika Laboratoryjna www.label.pl LAB-EL LB-760A: regulacja PID i procedura samostrojenia Nastawy regulatora PID W regulatorze LB-760A poczynając od wersji 7.1
Page 1 of 5 Copyright 2003-2010 LAB-EL Elektronika Laboratoryjna www.label.pl LAB-EL LB-760A: regulacja PID i procedura samostrojenia Nastawy regulatora PID W regulatorze LB-760A poczynając od wersji 7.1
Praktyka inżynierska korzystamy z tego co mamy. regulator. zespół wykonawczy. obiekt (model) Konfiguracja regulatora
 Konfiguracja regulatora") raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
ŻEGLARZ JACHTOWY TEORIA ŻEGLOWANIA
 Wiatr. Kursy jachtu względem wiatru ŻEGLARZ JACHTOWY TEORIA ŻEGLOWANIA Wiatr rzeczywisty (WR) jest to ruch powietrza wywołany warunkami meteorologicznymi i ukształtowaniem terenu w odniesieniu do nieruchomego
Wiatr. Kursy jachtu względem wiatru ŻEGLARZ JACHTOWY TEORIA ŻEGLOWANIA Wiatr rzeczywisty (WR) jest to ruch powietrza wywołany warunkami meteorologicznymi i ukształtowaniem terenu w odniesieniu do nieruchomego
W celu obliczenia charakterystyki częstotliwościowej zastosujemy wzór 1. charakterystyka amplitudowa 0,
 Bierne obwody RC. Filtr dolnoprzepustowy. Filtr dolnoprzepustowy jest układem przenoszącym sygnały o małej częstotliwości bez zmian, a powodującym tłumienie i opóźnienie fazy sygnałów o większych częstotliwościach.
Bierne obwody RC. Filtr dolnoprzepustowy. Filtr dolnoprzepustowy jest układem przenoszącym sygnały o małej częstotliwości bez zmian, a powodującym tłumienie i opóźnienie fazy sygnałów o większych częstotliwościach.
WYDZIAŁ PPT / KATEDRA INŻYNIERII BIOMEDYCZNEJ D-1 LABORATORIUM Z AUTOMATYKI I ROBOTYKI Ćwiczenie nr 4. Badanie jakości regulacji dwupołożeniowej.
 Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Państwowa Wyższa Szkoła Zawodowa
 Państwowa Wyższa Szkoła Zawodowa w Legnicy Laboratorium Podstaw Elektroniki i Miernictwa Ćwiczenie nr 17 WZMACNIACZ OPERACYJNY A. Cel ćwiczenia. - Przedstawienie właściwości wzmacniacza operacyjnego -
Państwowa Wyższa Szkoła Zawodowa w Legnicy Laboratorium Podstaw Elektroniki i Miernictwa Ćwiczenie nr 17 WZMACNIACZ OPERACYJNY A. Cel ćwiczenia. - Przedstawienie właściwości wzmacniacza operacyjnego -
UWAGA. Wszystkie wyniki zapisywać na dysku Dane E: Program i przebieg ćwiczenia:
 Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
ZESZYTY NAUKOWE NR 1(73) AKADEMII MORSKIEJ W SZCZECINIE
 AKADEMII MORSKIEJ W SZCZECINIE") ISSN 0209-2069 ZESZYTY NAUKOWE NR 1(73) AKADEMII MORSKIEJ W SZCZECINIE EXPLO-SHIP 2004 Tadeusz Szelangiewicz, Katarzyna Żelazny Prognozowanie charakterystyk napędowych statku ze śrubą stałą podczas pływania
ISSN 0209-2069 ZESZYTY NAUKOWE NR 1(73) AKADEMII MORSKIEJ W SZCZECINIE EXPLO-SHIP 2004 Tadeusz Szelangiewicz, Katarzyna Żelazny Prognozowanie charakterystyk napędowych statku ze śrubą stałą podczas pływania
REGULATOR PI W SIŁOWNIKU 2XI
 REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
Wzmacniacz operacyjny
 parametry i zastosowania Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego (klasyka: Fairchild ua702) 1965 Wzmacniacze
parametry i zastosowania Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego (klasyka: Fairchild ua702) 1965 Wzmacniacze