GRK 2. dr Wojciech Palubicki
|
|
|
- Ludwik Krajewski
- 5 lat temu
- Przeglądów:
Transkrypt
1 GRK dr Wojciech Palubicki

2 Macierz wektor produkt jako Transformacja T: R n R m T Ԧx = A Ԧx

3 Przemieszczanie wierzchołków - Transformacje Skalowanie Rotacja Translacja
4 -y -y Macierz rotacji M wobec punktu P (x, y ) +y +y -x +x M -x +x
5 -y -y Macierz rotacji M wobec punktu P (x, y ) 1. Translacja to początku: T( x, y ) +y +y -x +x M -x +x
6 Macierz rotacji M wobec punktu P (x, y ) 1. Translacja to początku: T( x, y ). Rotacja o kat θ: R θ +y +y M -x +x -x +x -y -y
7 Macierz rotacji M wobec punktu P (x, y ) 1. Translacja to początku: T( x, y ). Rotacja o kat θ: R θ 3. Translacja do punktu P : T x, y +y +y M -x +x -x +x -y -y
8 Macierz rotacji M wobec punktu P (x, y ) 1. Translacja to początku: T( x, y ). Rotacja o kat θ: R θ 3. Translacja do punktu P : T x, y M = T x, y R θ T( x, y ) +y +y M -x +x -x +x -y -y

9 Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space
10 World space transformation WS Object Space World Space
11 World space D
12 +y -x +x
13 +y e -x +x
14 g +y e -x +x
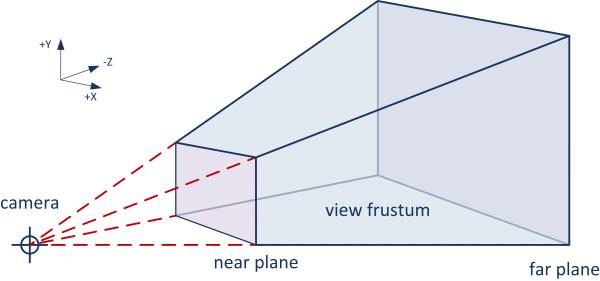
15 Bryla widzenia (view frustum) g +y e -x +x
16 Bryla widzenia (view frustum) g +y e Płaszczyzna daleka (far plane) -x +x
17 g +y e near plane far plane -x +x
18
19 g FoV +y e near plane far plane -x +x

20 Pole widzenia (Field of View - FoV)

21 Pole widzenia (Field of View - FoV)
22 Transformacja kamery Bryla widzenia: g
23 Transformacja kamery Bryla widzenia: górna płaszczyzna t t g
24 Transformacja kamery Bryla widzenia: górna płaszczyzna t dolna płaszczyzna b g t b
25 Transformacja kamery Bryla widzenia: górna płaszczyzna t dolna płaszczyzna b bliska płaszczyzna n g t n b
26 Transformacja kamery Bryla widzenia: górna płaszczyzna t dolna płaszczyzna b bliska płaszczyzna n daleka płaszczyzna f t g n f b
27 Transformacja kamery Bryla widzenia: górna płaszczyzna t dolna płaszczyzna b bliska płaszczyzna n daleka płaszczyzna f lewa płaszczyzna l prawa płaszczyzna r t g n f b
28 Transformacja kamery g +y -x +x
29 Transformacja kamery +y -x g +x -y
30 Płaszczyzna rzutowania +y -x g +x Image/view plane -y
31 Płaszczyzna rzutowania +y -x g +x Image/view plane -y
32 Rzutowanie równolegle +y -x g +x Image/view plane -y
33 Rzutowanie perspektywiczne +y -x g +x Image/view plane -y
34
35

36 Rzutowania Perspektywicznie rzutowanie Ortograficzne rzutowanie
37 Rzutowanie ortograficzne +y -z g +z image plane -y
38 Rzutowanie nie-ortograficzne +y -z g +z image plane -y
39 Rzutowanie ortograficzne View frustum g Orthographic view volume g
40 Bryla kanoniczna +y +y -z g +z g +z -y Orthographic view volume -y Canonical view volume
41 Bryla kanoniczna
42 Viewport transformation -z +z -z +z
43 Viewport transformation -x +x
44 Viewport transformation +y -x +x -x +x -y
45 Viewport transformation +y -x +x -x +x -y
46 Potok graficzny World space Każdy krok będziemy chcieli wyrazić za pomocy operacji macierzowej. Cały potok może być wykonany za pomocy jednej operacji macierzy.
47 Potok graficzny Camera/view space Każdy krok będziemy chcieli wyrazić za pomocy operacji macierzowej. Cały potok może być wykonany za pomocy jednej operacji macierzy.
48 Potok graficzny Każdy krok będziemy chcieli wyrazić za pomocy operacji macierzowej. Cały potok może być wykonany za pomocy jednej operacji macierzy. Orthographic view volume
49 Potok graficzny Każdy krok będziemy chcieli wyrazić za pomocy operacji macierzowej. Cały potok może być wykonany za pomocy jednej operacji macierzy. Canonical view volume
50 Potok graficzny Każdy krok będziemy chcieli wyrazić za pomocy operacji macierzowej. Cały potok może być wykonany za pomocy jednej operacji macierzy. Window space
51 Potok graficzny D Każdy krok będziemy chcieli wyrazić za pomocy operacji macierzowej. Cały potok może być wykonany za pomocy jednej operacji macierzy. 4D
52 Bryla kanoniczna Bryła kanoniczna to sześcian x x ze środkiem w początku Bryła widzenia została przekształcona do postaci takiego sześcianu
53 Bryla kanoniczna Bryła kanoniczna to sześcian x x ze środkiem w początku Bryła widzenia została przekształcona do postaci takiego sześcianu Ucinamy współrzędną z
54 Przekształcenie bryły kanonicznej Musimy odwzorować kwadrat [-1, 1] na czworokąt [, n x ] x [, n y ] n y n x
55 Przekształcenie bryły kanonicznej Musimy odwzorować kwadrat [-1, 1] na czworokąt [, n x ] x [, n y ] Następująca macierz transformacji dokonuje skalowania: n x n y 1 n y n x
56 Przekształcenie bryły kanonicznej n x, n y Musimy odwzorować kwadrat [-1, 1] na czworokąt [, n x ] x [, n y ] Następująca macierz transformacji dokonuje skalowania: n x, n y n x n y 1 n y n x
57 Przekształcenie bryły kanonicznej n x, n y Musimy odwzorować kwadrat [-1, 1] na czworokąt [, n x ] x [, n y ] Następująca macierz transformacji dokonuje translacji: n x, n y 1 n x 1 n y 1 n y n x
58 n x,n y Przekształcenie bryły kanonicznej Musimy odwzorować kwadrat [-1, 1] na czworokąt [, n x ] x [, n y ] Następująca macierz transformacji tego dokonuje:, n x n x n y n y 1 n y n x
59 Przekształcenie bryły kanonicznej W praktyce piksele reprezentują współrzędne jednostki integer, czyli musimy przekształcać do [ 1, n x 1 ] x [ 1, n y 1 ] Wtedy: n x n x 1 n y n y 1 1 n y n x
60 Przekształcenie bryły kanonicznej Rzutowanie dokonaliśmy przy odrzuceniu współrzędnej z Ale chcemy nadal być wstanie konkatenować naszą macierz z innymi, czyli ostateczna postać naszej macierzy to 4D: M vp = n x n y n x 1 n y 1 1 1
61 Ortograficzna bryła widzenia Najpierw musimy środek do początku przenieść
62 Ortograficzna bryła widzenia Najpierw musimy środek do początku przenieść b + t 1 l+r l+r l+r 1 b+t 1 l+r b+t n+f 1
63 Ortograficzna bryła widzenia Najpierw musimy środek do początku przenieść b + t n + f 1 l+r l+r l+r 1 b+t 1 l+r b+t n+f 1
64 Ortograficzna bryła widzenia Najpierw musimy środek do początku przenieść b + t n + f 1 l+r l+r l+r 1 b+t 1 l+r b+t n+f 1
65 Ortograficzna bryła widzenia Najpierw musimy środek do początku przenieść b + t n + f 1 l+r l+r l+r 1 b+t 1 l+r b+t n+f 1
66 Ortograficzna bryła widzenia Potem musimy wszystko skalować do [-1, 1]: b + t n + f
67 Ortograficzna bryła widzenia Potem musimy wszystko skalować do [-1, 1]: b + t n + f r l l+r l+r b+t t b n f l+r b+t n f 1
68 Ortograficzna bryła widzenia Konkatenujemy macierze żeby uzyskać jedną macierz transformacji do ortograficznej bryły widzenia: M orth = r l l+r l+r b+t t b n f l+r b+t n f 1 1 l+r l+r l+r 1 b+t l+r b+t 1 n+f 1 = r l l+r l+r t b b+t n f l+r r l b+t t b n+f n f 1
69 Ortograficzna bryła widzenia Konkatenujemy macierze żeby uzyskać jedną macierz transformacji do ortograficznej bryły widzenia: M orth = r l l+r l+r b+t t b n f l+r b+t n f 1 1 l+r l+r l+r 1 b+t l+r b+t 1 n+f 1 = r l l+r l+r t b b+t n f l+r r l b+t t b n+f n f 1
70 Potok graficzny Czyli ostatni krok jest: x piksel y piksel z kanoniczny 1 = M vp M orth x y z 1 M ort M vp
71 Potok graficzny Transformacja: x piksel y piksel z kanoniczny 1 = M vp M ort x y z 1 M ort M vp
72 Wyrównanie systemów współrzędnych World space: Wektory, Ԧx, Ԧy, i Ԧz y e g Camera space: Wektory Ԧe, i Ԧg -z y g -z
73 Wyrównanie systemów współrzędnych Żeby jedną przestrzeń na drugą przestrzeń przekształcić potrzebujemy jednego systemu współrzędnych dla obydwóch przestrzeni y v u x z g Układ świata Układ kamery
74 Wyrównanie systemów współrzędnych Pierwszy wektor bazowy: Ԧt Ԧg = u Drugi wektor bazowy: Ԧg u = Ԧv u t v Trzeci wektor bazowy: Ԧg: = w w
75 Wyrównanie systemów współrzędnych Wyrównać początki naszych systemów współrzędnych Wyrównać wektory bazowe v e +y w +z -z -y
76 Wyrównanie systemów współrzędnych Wyrównanie początków przez translacje: v 1 1 e x e y 1 e z 1 e +y w +y v +z -z +z w -z -y -y
77 Wyrównanie systemów współrzędnych Rotacja w przeciwnym kierunku jest trywialna: u x v x w x u y v y w y u z v z w z 1 +y v +z w -z -y
78 Wyrównanie systemów współrzędnych Macierz odwrotna w przypadku ortonormalnej bazy to transpozycja tej macierzy (wektory u,v,w muszą być znormalizowane): u x u y u z v x v y v z w x w y w z 1 u u w w
79 Wyrównanie systemów współrzędnych Macierz transformacji z world space na view space jest wtedy: M cam = u x u y u z v x v y v z w y w z 1 w x 1 1 e x e y 1 e z 1
80 Rzutowanie ortograficzne x piksel y piksel z kanoniczny 1 = M vp M orth M cam x y z 1

81 Rzutowanie równoległe The Simpons Tapped Out
82 Rzutowanie równoległe y g -z

83 Rzutowanie perspektywiczne Co jest perspektywa? Wielkość obiektu jest proporcjonalna do dystansu.
84 Potok graficzny

85 Potok graficzny Dodać perspektywę
86 Transformacja bryły widzenia Bryla widzenia Ortograficzna bryła widzenia

87 Transformacja bryły widzenia Bryla widzenia Ortograficzna bryła widzenia
88 e view plane far plane
89 e view plane far plane
90 e view plane far plane
91 Rzutowanie na płaszczyznę y y p e g View plane
92 Rzutowanie na płaszczyznę y y p e g d z View plane
93 Rzutowanie na płaszczyznę y y p y = d z czyli y p e g d z View plane
94 Rzutowanie na płaszczyznę y y p y = d z czyli y p y p = d z y e g d z View plane
95 Założenia Przyjmujemy ze: Patrzymy w kierunku negatywnej osi z Rzutujemy na powierzchnie bliską (near plane) Czyli dystans d = -n, co znaczy: x p = d z x = n z x y p = d z y = n z y
96 Założenia Przyjmujemy ze: Patrzymy w kierunku negatywnej osi z Rzutujemy na powierzchnie bliską (near plane) Czyli dystans d = -n, co znaczy: x p = d z x = n z x y p = d z y = n z y
97 Założenia Przyjmujemy ze: Patrzymy w kierunku negatywnej osi z Rzutujemy na powierzchnie bliską (near plane) Czyli dystans d = -n, co znaczy: x p = d z x = n z x y p = d z y = n z y M x y z 1 = nx z ny z z 1
98 System współrzędnych jednorodnych Nasze multiplikacje macierzami to liniowe transformacje, tzn. tylko mogą wygenerować wartości jak np.: x = a 1 x + b 1 y + c 1 z Wprowadzenie współrzędnych jednorodnych umożliwia reprezentacje punktów (x, y, z) jako (x, y, z, 1) i umożliwia nam skorzystanie z afinicznych transformacji, np.: x = a 1 x + b 1 y + c 1 z + d 1
99 System współrzędnych jednorodnych Nasze multiplikacje macierzami to liniowe transformacje, tzn. tylko mogą wygenerować wartości jak np.: x = a 1 x + b 1 y + c 1 z Wprowadzenie współrzędnych jednorodnych umożliwia reprezentacje punktów (x, y, z) jako (x, y, z, 1) i umożliwia nam skorzystanie z afinicznych transformacji, np.: x = a 1 x + b 1 y + c 1 z + d 1
100 System współrzędnych jednorodnych We współrzędnych jednorodnych wektor (x, y, z, 1) reprezentuje punkt (x, y, z) Teraz wprowadzamy możliwość reprezentacji punktów za pomocy (x, y, z, w) co daje nam punkt ( x w, y w, z w ) jednorodny kartezjański
101 System współrzędnych jednorodnych Wtedy transformacja macierzowa staje się: x y z 1 = a 1 b 1 c 1 T x a b c T y a 3 b 3 c 3 T z a 4 b 4 w c 4 x y z 1 = a 1 x + b 1 y + c 1 z + T x a x + b y + c z + T y a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w a 1 x + b 1 y + c 1 z + T x a x + b y + c z + T y a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w homogenizacja a 1 x+b 1 y+c 1 z+t x a 4 x+b 4 y+c 4 z+w a x+b y+c z+t y a 4 x+b 4 y+c 4 z+w a 3 x+b 3 y+c 3 z+t z a 4 x+b 4 y+c 4 z+w 1
102 System współrzędnych jednorodnych Wtedy transformacja macierzowa staje się: x y z 1 = a 1 b 1 c 1 T x a b c T y a 3 b 3 c 3 T z a 4 b 4 w c 4 x y z 1 = a 1 x + b 1 y + c 1 z + T x a x + b y + c z + T y a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w a 1 x + b 1 y + c 1 z + T x a x + b y + c z + T y a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w homogenizacja a 1 x+b 1 y+c 1 z+t x a 4 x+b 4 y+c 4 z+w a x+b y+c z+t y a 4 x+b 4 y+c 4 z+w a 3 x+b 3 y+c 3 z+t z a 4 x+b 4 y+c 4 z+w 1
103 System współrzędnych jednorodnych Wtedy transformacja macierzowa staje się: x y z 1 = a 1 b 1 c 1 T x a b c T y a 3 b 3 c 3 T z a 4 b 4 w c 4 x y z 1 = a 1 x + b 1 y + c 1 z + T x a x + b y + c z + T y a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w a 1 x + b 1 y + c 1 z + T x a x + b y + c z + T y a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w homogenizacja a 1 x+b 1 y+c 1 z+t x a 4 x+b 4 y+c 4 z+w a x+b y+c z+t y a 4 x+b 4 y+c 4 z+w a 3 x+b 3 y+c 3 z+t z a 4 x+b 4 y+c 4 z+w 1
104 System współrzędnych jednorodnych Wtedy transformacja macierzowa staje się: x y z 1 = a 1 b 1 c 1 T x a b c T y a 3 b 3 c 3 T z a 4 b 4 w c 4 x y z 1 = a 1 x + b 1 y + c 1 z + T x a x + b y + c z + T y a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w a 1 x + b 1 y + c 1 z + T x a x + b y + c z + T y a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w homogenizacja a 1 x+b 1 y+c 1 z+t x a 4 x+b 4 y+c 4 z+w a x+b y+c z+t y a 4 x+b 4 y+c 4 z+w a 3 x+b 3 y+c 3 z+t z a 4 x+b 4 y+c 4 z+w 1
105 System współrzędnych jednorodnych Wtedy transformacja macierzowa staje się: x y z 1 = a 1 b 1 c 1 T x a b c T y a 3 b 3 c 3 T z a 4 b 4 w c 4 x y z 1 = a 1 x + b 1 y + c 1 z + T x a x + b y + c z + T y a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w a 1 x + b 1 y + c 1 z + T x a x + b y + c z + T y a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w Układ współrzędnych jednorodnych homogenizacja a 1 x+b 1 y+c 1 z+t x a 4 x+b 4 y+c 4 z+w a x+b y+c z+t y a 4 x+b 4 y+c 4 z+w a 3 x+b 3 y+c 3 z+t z a 4 x+b 4 y+c 4 z+w 1 Układ współrzędnych kartezjańskich
106 System współrzędnych jednorodnych Wprowadzenie transformacji rzutowania (homografia) umożliwia nam stworzyć wartości jak np.: x = a 1x + b 1 y + c 1 z + T x a 4 x + b 4 y + c 4 z + w
107 System współrzędnych jednorodnych Wprowadzenie transformacji rzutowania (homografia) umożliwia nam stworzyć wartości jak np.: x = a 1x + b 1 y + c 1 z + T x a 4 x + b 4 y + c 4 z + w nx z ny z z 1
108 Transformacja bryły widzenia Kalkulacja: a 1 x + b 1 y + c 1 z + T x a 4 x + b 4 y + c 4 z + w a x + b y + c z + T y a 4 x + b 4 y + c 4 z + w a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w 1 Cel: nx z ny z z 1
109 Transformacja bryły widzenia Kalkulacja: a 1 x + b 1 y + c 1 z + T x a 4 x + b 4 y + c 4 z + w a x + b y + c z + T y a 4 x + b 4 y + c 4 z + w a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w 1 Cel: nx z ny z z x y z 1 Czwarty wiersz
110 Transformacja bryły widzenia Kalkulacja: a 1 x + b 1 y + c 1 z + T x a 4 x + b 4 y + c 4 z + w a x + b y + c z + T y a 4 x + b 4 y + c 4 z + w a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w 1 Cel: nx z ny z z x y z 1 Czwarty wiersz
111 Transformacja bryły widzenia Kalkulacja: a 1 x + b 1 y + c 1 z + T x a 4 x + b 4 y + c 4 z + w a x + b y + c z + T y a 4 x + b 4 y + c 4 z + w a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w 1 Cel: nx z ny z z x y z 1 n. n... 1 x y z 1 Czwarty wiersz Pierwszy i drugi wiersz
112 Transformacja bryły widzenia Kalkulacja: a 1 x + b 1 y + c 1 z + T x a 4 x + b 4 y + c 4 z + w a x + b y + c z + T y a 4 x + b 4 y + c 4 z + w a 3 x + b 3 y + c 3 z + T z a 4 x + b 4 y + c 4 z + w 1 Cel: nx z ny z z x y z 1 n. n... 1 x y z 1 Czwarty wiersz Pierwszy i drugi wiersz
113 Co z trzecim wierszem? nx n n x y z ny???? 1 z 1 z z 1
114 Transformacja bryły widzenia e near plane n far plane f
115 Transformacja bryły widzenia z p = f z e z p near plane n far plane f
116 Transformacja bryły widzenia z p = n e z z p near plane n far plane f
117 Transformacja bryły widzenia z p [n, f] z e z p near plane n far plane f
118 Transformacja bryły widzenia z p [n, f] z e z p near plane n far plane f
119 Transformacja bryły widzenia z p ma zachowac porzadek wierzcholkow z e z p near plane n far plane f
120 Transformacja bryły widzenia z p = nf z [n, f] e z z p near plane n far plane f
121 Transformacja bryły widzenia z p = n + f nf z e z z p near plane n far plane f
122 Zachowanie porządku wierzchołków z p = n + f fn z Porządek wzdłuż osi z jest zachowany gdy > n z 1 > z f to z 1p > z p z 1p z p = fn z fn z 1 = (z 1 z )fn z 1 z Bo f, z 1, z, n < mamy fn z 1 z > i bo z 1 > z mamy z 1 z > Czyli z 1p > z p
123 Zachowanie porządku wierzchołków z p = n + f fn z Porządek wzdłuż osi z jest zachowany gdy > n z 1 > z f to z 1p > z p z 1p z p = fn z fn z 1 = (z 1 z )fn z 1 z Bo f, z 1, z, n < mamy fn z 1 z > i bo z 1 > z mamy z 1 z > Czyli z 1p > z p
124 Zachowanie porządku wierzchołków z p = n + f fn z Porządek wzdłuż osi z jest zachowany gdy > n z 1 > z f to z 1p > z p z 1p z p = fn z fn z 1 = (z 1 z )fn z 1 z Bo f, z 1, z, n < mamy fn z 1 z > i bo z 1 > z mamy z 1 z > Czyli z 1p > z p
125 Zachowanie porządku wierzchołków z p = n + f fn z Porządek wzdłuż osi z jest zachowany gdy > n z 1 > z f to z 1p > z p z 1p z p = fn z fn z 1 = (z 1 z )fn z 1 z Bo f, z 1, z, n < mamy fn z 1 z > i bo z 1 > z mamy z 1 z > Czyli z 1p > z p
126 Zachowanie porządku wierzchołków z p = n + f fn z Porządek wzdłuż osi z jest zachowany gdy > n z 1 > z f to z 1p > z p z 1p z p = fn z fn z 1 = (z 1 z )fn z 1 z Bo f, z 1, z, n < mamy fn z 1 z > i bo z 1 > z mamy z 1 z > Czyli z 1p > z p
127 Transformacja bryły widzenia z p = n + f fn z z p ~ 1 z
128 Transformacja bryły widzenia z p = n + f fn z z p ~ 1 z z p z
129 Macierz P n n n + f nf 1 x y z 1 = nx z ny z n f + nf z 1
130 Macierz P n n n + f nf 1 x y z 1 = nx z ny z n + f nf z 1
131 Macierz transformacji perspektywicznej Czyli nasza końcowa macierz transformacji perspektywicznej M pers jest wtedy: n M per = M orth P = M n orth n f nf 1 = n r l n t b l+r l r b+t b t f+n n f 1 fn f n
132 Macierz transformacji perspektywicznej Czyli nasza końcowa macierz transformacji perspektywicznej M pers jest wtedy: n M per = M orth P = M n orth n + f nf 1 = n r l n t b l+r l r b+t b t f+n n f 1 fn f n
133 Macierz transformacji perspektywicznej Czyli nasza końcowa macierz transformacji perspektywicznej M pers jest wtedy: n M per = M orth P = M n orth n + f nf 1 = n r l n t b l+r l r b+t b t f+n n f 1 fn f n
134 Potok graficzny Potok graficzny z ortograficznym rzutem: x y M vp M ort M cam z 1 Potok graficzny z perspektywicznym rzutem: x y M vp M per M cam z 1
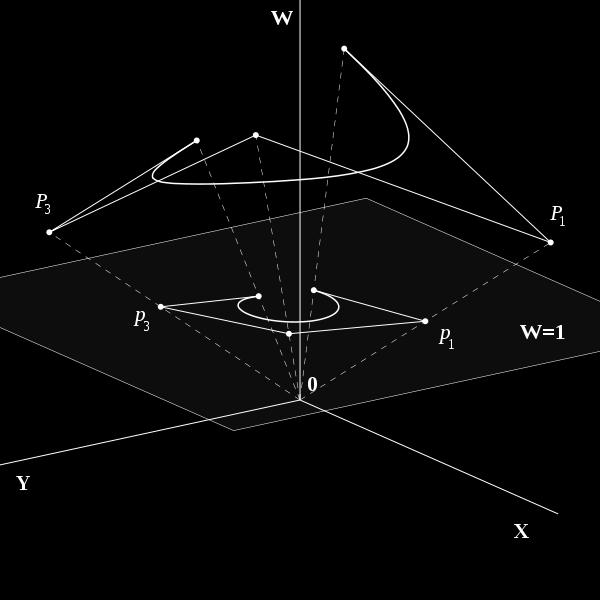
135 Współrzędne jednorodne D
136 Współrzędne jednorodne Współrzędne jednorodne 3D
137 Współrzędne jednorodne Ścięcie

138 Współrzędne jednorodne Translacja w D
139 Współrzędne jednorodne D: w 1 (x)
140 Współrzędne jednorodne w 1 (x, 1) (x)
141 Współrzędne jednorodne w 1 (x, 1) (x+d, 1) (x)
142 Współrzędne jednorodne w 1 (x, 1) (x+d, 1) (x) (x+d)
143 Współrzędne jednorodne w 1 (x, 1) (x+d, 1) (ẋ/w, 1) (x) (x+d) (x)
144 Współrzędne jednorodne w 1 (x, 1) (x+d, 1) (ẋ/w, 1) (x) (x+d) (x)
145 Współrzędne jednorodne w 1 (ẋ, w) (x, 1) (x+d, 1) (ẋ/w, 1) (x) (x+d) (x) (x)
146 Współrzędne jednorodne w 1 (ẋ, w) (ẋ+ḋ, w) (x, 1) (x+d, 1) (ẋ/w, 1) (x) (x+d) (x) (x)
147 Współrzędne jednorodne w 1 (ẋ, w) (ẋ+ḋ, w) (x, 1) (x+d, 1) (ẋ/w, 1) ((ẋ+ḋ)/w, 1) (x) (x+d) (x) (x)
148 Współrzędne jednorodne w 1 (ẋ, w) (ẋ+ḋ, w) (x, 1) (x+d, 1) (ẋ/w, 1) ((ẋ+ḋ)/w, 1) (x) (x+d) (x) (x) (x+d)


149 August Möbius
150 Rysowanie na ekranie Żeby narysować linie na ekranie możemy się wtedy posługiwać następującym pseudokodem: compute M vp compute M per compute M cam M = M vp M per M cam for each line segment (a, b) do p = M a q = M b drawline(p x /p w, p y /p w, q x /q w, q y /q w )
Grafika komputerowa i wizualizacja. dr Wojciech Pałubicki
 Grafika komputerowa i wizualizacja dr Wojciech Pałubicki Grafika komputerowa Obrazy wygenerowane za pomocy komputera Na tych zajęciach skupiamy się na obrazach wygenerowanych ze scen 3D do interaktywnych
Grafika komputerowa i wizualizacja dr Wojciech Pałubicki Grafika komputerowa Obrazy wygenerowane za pomocy komputera Na tych zajęciach skupiamy się na obrazach wygenerowanych ze scen 3D do interaktywnych
GRK 3. Dr Wojciech Palubicki
 GRK 3 Dr Wojciech Palubicki Potok graficzny Potok graficzny World Space View Space Orthographic view Window space Canonincal view Potok graficzny World Space View Space Orthographic view Canonincal view
GRK 3 Dr Wojciech Palubicki Potok graficzny Potok graficzny World Space View Space Orthographic view Window space Canonincal view Potok graficzny World Space View Space Orthographic view Canonincal view
Transformacje obiektów 3D
 Synteza i obróbka obrazu Transformacje obiektów 3D Opracowanie: dr inż. Grzegorz Szwoch Politechnika Gdańska Katedra Systemów Multimedialnych Lokalny układ współrzędnych Tworząc model obiektu, zapisujemy
Synteza i obróbka obrazu Transformacje obiektów 3D Opracowanie: dr inż. Grzegorz Szwoch Politechnika Gdańska Katedra Systemów Multimedialnych Lokalny układ współrzędnych Tworząc model obiektu, zapisujemy
GRK 4. dr Wojciech Palubicki
 GRK 4 dr Wojciech Palubicki Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space Projection
GRK 4 dr Wojciech Palubicki Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space Projection
Ćwiczenia nr 4. TEMATYKA: Rzutowanie
 TEMATYKA: Rzutowanie Ćwiczenia nr 4 DEFINICJE: Rzut na prostą: rzutem na prostą l (zwaną rzutnią) w kierunku rzutowania k (k l) nazywamy przekształcenie płaszczyzny przyporządkowujące: a) Punktom prostej
TEMATYKA: Rzutowanie Ćwiczenia nr 4 DEFINICJE: Rzut na prostą: rzutem na prostą l (zwaną rzutnią) w kierunku rzutowania k (k l) nazywamy przekształcenie płaszczyzny przyporządkowujące: a) Punktom prostej
Grafika Komputerowa Wykład 4. Synteza grafiki 3D. mgr inż. Michał Chwesiuk 1/30
 Wykład 4 mgr inż. 1/30 Synteza grafiki polega na stworzeniu obrazu w oparciu o jego opis. Synteza obrazu w grafice komputerowej polega na wykorzystaniu algorytmów komputerowych do uzyskania obrazu cyfrowego
Wykład 4 mgr inż. 1/30 Synteza grafiki polega na stworzeniu obrazu w oparciu o jego opis. Synteza obrazu w grafice komputerowej polega na wykorzystaniu algorytmów komputerowych do uzyskania obrazu cyfrowego
Wykład 4. Rendering (1) Informacje podstawowe
 Informacje podstawowe") Wykład 4. Rendering (1) Informacje podstawowe Z punktu widzenia dzisiejszego programowania gier: Direct3D jest najczęściej wykorzystywanym przez profesjonalnych deweloperów gier API graficznym na platformie
Wykład 4. Rendering (1) Informacje podstawowe Z punktu widzenia dzisiejszego programowania gier: Direct3D jest najczęściej wykorzystywanym przez profesjonalnych deweloperów gier API graficznym na platformie
Trójwymiarowa grafika komputerowa rzutowanie
 Trójwymiarowa grafika komputerowa rzutowanie Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej Rzutowanie w przestrzeni 3D etapy procesu rzutowania określenie rodzaju rzutu określenie
Trójwymiarowa grafika komputerowa rzutowanie Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej Rzutowanie w przestrzeni 3D etapy procesu rzutowania określenie rodzaju rzutu określenie
Przekształcenia geometryczne. Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej
 Przekształcenia geometryczne Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej Akademia Górniczo Hutnicza w Krakowie Przekształcenia elementarne w przestrzeni D Punkty p w E na płaszczyźnie
Przekształcenia geometryczne Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej Akademia Górniczo Hutnicza w Krakowie Przekształcenia elementarne w przestrzeni D Punkty p w E na płaszczyźnie
2 Przygotował: mgr inż. Maciej Lasota
 Laboratorium nr 2 1/6 Grafika Komputerowa 3D Instrukcja laboratoryjna Temat: Manipulowanie przestrzenią 2 Przygotował: mgr inż. Maciej Lasota 1) Manipulowanie przestrzenią Istnieją dwa typy układów współrzędnych:
Laboratorium nr 2 1/6 Grafika Komputerowa 3D Instrukcja laboratoryjna Temat: Manipulowanie przestrzenią 2 Przygotował: mgr inż. Maciej Lasota 1) Manipulowanie przestrzenią Istnieją dwa typy układów współrzędnych:
Z ostatniego wzoru i zależności (3.20) można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne
 można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne") 46 III. Przekształcenia w przestrzeni trójwymiarowej Z ostatniego wzoru i zależności (3.20) można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne Złożone obiekty trójwymiarowe można uważać,
46 III. Przekształcenia w przestrzeni trójwymiarowej Z ostatniego wzoru i zależności (3.20) można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne Złożone obiekty trójwymiarowe można uważać,
Programowanie Procesorów Graficznych
 Programowanie Procesorów Graficznych Wykład 1 9.10.2012 Prehistoria Zadaniem karty graficznej było sterowanie sygnałem do monitora tak aby wyświetlić obraz zgodnie z zawartościa pamięci. Programiści pracowali
Programowanie Procesorów Graficznych Wykład 1 9.10.2012 Prehistoria Zadaniem karty graficznej było sterowanie sygnałem do monitora tak aby wyświetlić obraz zgodnie z zawartościa pamięci. Programiści pracowali
Animowana grafika 3D. Opracowanie: J. Kęsik.
 Animowana grafika 3D Opracowanie: J. Kęsik kesik@cs.pollub.pl Rzutowanie Równoległe Perspektywiczne Rzutowanie równoległe Rzutowanie równoległe jest powszechnie używane w rysunku technicznym - umożliwienie
Animowana grafika 3D Opracowanie: J. Kęsik kesik@cs.pollub.pl Rzutowanie Równoległe Perspektywiczne Rzutowanie równoległe Rzutowanie równoległe jest powszechnie używane w rysunku technicznym - umożliwienie
Przekształcenia geometryczne w grafice komputerowej. Marek Badura
 Przekształcenia geometryczne w grafice komputerowej Marek Badura PRZEKSZTAŁCENIA GEOMETRYCZNE W GRAFICE KOMPUTEROWEJ Przedstawimy podstawowe przekształcenia geometryczne na płaszczyźnie R 2 (przestrzeń
Przekształcenia geometryczne w grafice komputerowej Marek Badura PRZEKSZTAŁCENIA GEOMETRYCZNE W GRAFICE KOMPUTEROWEJ Przedstawimy podstawowe przekształcenia geometryczne na płaszczyźnie R 2 (przestrzeń
GRK 5. dr Wojciech Palubicki
 GRK 5 dr Wojciech Palubicki Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space Projection
GRK 5 dr Wojciech Palubicki Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space Projection
Krystalochemia białek 2016/2017
 Zestaw zadań 4. Grupy punktowe. Składanie elementów symetrii. Translacyjne elementy symetrii grupy punktowe, składanie elementów symetrii, translacyjne elementy symetrii: osie śrubowe, płaszczyzny ślizgowe
Zestaw zadań 4. Grupy punktowe. Składanie elementów symetrii. Translacyjne elementy symetrii grupy punktowe, składanie elementów symetrii, translacyjne elementy symetrii: osie śrubowe, płaszczyzny ślizgowe
FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE
 Umiejętności opracowanie: Maria Lampert LISTA MOICH OSIĄGNIĘĆ FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE Co powinienem umieć Umiejętności znam podstawowe przekształcenia geometryczne: symetria osiowa i środkowa,
Umiejętności opracowanie: Maria Lampert LISTA MOICH OSIĄGNIĘĆ FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE Co powinienem umieć Umiejętności znam podstawowe przekształcenia geometryczne: symetria osiowa i środkowa,
GRK 5. dr Wojciech Palubicki
 GRK 5 dr Wojciech Palubicki Projekty (dwu-osobowe) Napisać symulacje lotu kosmicznego w OpenGLu: Korzystając tylko z bibliotek które na ćwiczeniach zostały omówione Interaktywna symulacja Wszystkie wielokąty
GRK 5 dr Wojciech Palubicki Projekty (dwu-osobowe) Napisać symulacje lotu kosmicznego w OpenGLu: Korzystając tylko z bibliotek które na ćwiczeniach zostały omówione Interaktywna symulacja Wszystkie wielokąty
Przekształcenia liniowe
 Przekształcenia liniowe Zadania Które z następujących przekształceń są liniowe? (a) T : R 2 R 2, T (x, x 2 ) = (2x, x x 2 ), (b) T : R 2 R 2, T (x, x 2 ) = (x + 3x 2, x 2 ), (c) T : R 2 R, T (x, x 2 )
Przekształcenia liniowe Zadania Które z następujących przekształceń są liniowe? (a) T : R 2 R 2, T (x, x 2 ) = (2x, x x 2 ), (b) T : R 2 R 2, T (x, x 2 ) = (x + 3x 2, x 2 ), (c) T : R 2 R, T (x, x 2 )
gdzie (4.20) (4.21) 4.3. Rzut równoległy
 (4.21) 4.3. Rzut równoległy") 4.3. Rzut równoległy 75 gdzie (4.20) Punkt zbiegu, określony wzorami (4.19) (4.20), leży na prostej przechodzącej przez środek rzutowania i równoległej do wektora u. Zauważmy, że gdy wektor u jest równoległy
4.3. Rzut równoległy 75 gdzie (4.20) Punkt zbiegu, określony wzorami (4.19) (4.20), leży na prostej przechodzącej przez środek rzutowania i równoległej do wektora u. Zauważmy, że gdy wektor u jest równoległy
Baza w jądrze i baza obrazu ( )
") Przykład Baza w jądrze i baza obrazu (839) Znajdź bazy jądra i obrazu odwzorowania α : R 4 R 3, gdzie α(x, y, z, t) = (x + 2z + t, 2x + y 3z 5t, x y + z + 4t) () zór ten oznacza, że α jest odwzorowaniem
Przykład Baza w jądrze i baza obrazu (839) Znajdź bazy jądra i obrazu odwzorowania α : R 4 R 3, gdzie α(x, y, z, t) = (x + 2z + t, 2x + y 3z 5t, x y + z + 4t) () zór ten oznacza, że α jest odwzorowaniem
Elementy grafiki komputerowej. Elementy geometrii afinicznej
 Elementy grafiki komputerowej. Elementy geometrii j Aleksander Denisiuk Uniwersytet Warmińsko-Mazurski Olsztyn, ul. Słoneczna 54 denisjuk@matman.uwm.edu.pl 1 / 28 Elementy geometrii j Najnowsza wersja
Elementy grafiki komputerowej. Elementy geometrii j Aleksander Denisiuk Uniwersytet Warmińsko-Mazurski Olsztyn, ul. Słoneczna 54 denisjuk@matman.uwm.edu.pl 1 / 28 Elementy geometrii j Najnowsza wersja
Układy równań i nierówności liniowych
 Układy równań i nierówności liniowych Wiesław Krakowiak 1 grudnia 2010 1 Układy równań liniowych DEFINICJA 11 Układem równań m liniowych o n niewiadomych X 1,, X n, nazywamy układ postaci: a 11 X 1 + +
Układy równań i nierówności liniowych Wiesław Krakowiak 1 grudnia 2010 1 Układy równań liniowych DEFINICJA 11 Układem równań m liniowych o n niewiadomych X 1,, X n, nazywamy układ postaci: a 11 X 1 + +
GRAFIKA CZASU RZECZYWISTEGO Podstawy syntezy grafiki 3D i transformacji geometrycznych
 GRAFIKA CZASU RZECZYWISTEGO Podstawy syntezy grafiki 3D i transformacji geometrycznych Grafika komputerowa i wizualizacja, Bioinformatyka S1, II Rok Synteza grafiki 3D Pod pojęciem syntezy grafiki rozumiemy
GRAFIKA CZASU RZECZYWISTEGO Podstawy syntezy grafiki 3D i transformacji geometrycznych Grafika komputerowa i wizualizacja, Bioinformatyka S1, II Rok Synteza grafiki 3D Pod pojęciem syntezy grafiki rozumiemy
Przekształcanie równań stanu do postaci kanonicznej diagonalnej
 Przekształcanie równań stanu do postaci kanonicznej diagonalnej Przygotowanie: Dariusz Pazderski Liniowe przekształcenie równania stanu Rozważmy liniowe równanie stanu i równanie wyjścia układu niesingularnego
Przekształcanie równań stanu do postaci kanonicznej diagonalnej Przygotowanie: Dariusz Pazderski Liniowe przekształcenie równania stanu Rozważmy liniowe równanie stanu i równanie wyjścia układu niesingularnego
Andrzej Marciniak GRAFIKA KOMPUTEROWA. Wykłady dla studentów kierunku informatyka Państwowej Wyższej Szkoły Zawodowej w Kaliszu
 Andrzej Marciniak GRAFIKA KOMPUTEROWA Wykłady dla studentów kierunku informatyka Państwowej Wyższej Szkoły Zawodowej w Kaliszu Wykłady są przeznaczone wyłącznie do indywidualnego użytku przez studentów
Andrzej Marciniak GRAFIKA KOMPUTEROWA Wykłady dla studentów kierunku informatyka Państwowej Wyższej Szkoły Zawodowej w Kaliszu Wykłady są przeznaczone wyłącznie do indywidualnego użytku przez studentów
Wykład 5. Komórka elementarna. Sieci Bravais go
 Wykład 5 Komórka elementarna Sieci Bravais go Doskonały kryształ składa się z atomów jonów, cząsteczek) uporządkowanych w sieci krystalicznej opisanej przez trzy podstawowe wektory translacji a, b, c,
Wykład 5 Komórka elementarna Sieci Bravais go Doskonały kryształ składa się z atomów jonów, cząsteczek) uporządkowanych w sieci krystalicznej opisanej przez trzy podstawowe wektory translacji a, b, c,
i = [ 0] j = [ 1] k = [ 0]
![i = [ 0] j = [ 1] k = [ 0]](/thumbs/70/62901734.jpg "i = [ 0] j = [ 1] k = [ 0]") Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
Wektory i macierze w OpenGL
 1 Wektory i macierze w OpenGL Filip Zawrocki Uniwersytet Mikołaja Kopernika Wydział Fizyki, Astronomii i Informatyki Stosowanej Krótkie przypomnienie wiadomości z algery liniowej Przestrzenie wektorowe
1 Wektory i macierze w OpenGL Filip Zawrocki Uniwersytet Mikołaja Kopernika Wydział Fizyki, Astronomii i Informatyki Stosowanej Krótkie przypomnienie wiadomości z algery liniowej Przestrzenie wektorowe
3. Macierze i Układy Równań Liniowych
 3. Macierze i Układy Równań Liniowych Rozważamy równanie macierzowe z końcówki ostatniego wykładu ( ) 3 1 X = 4 1 ( ) 2 5 Podstawiając X = ( ) x y i wymnażając, otrzymujemy układ 2 równań liniowych 3x
3. Macierze i Układy Równań Liniowych Rozważamy równanie macierzowe z końcówki ostatniego wykładu ( ) 3 1 X = 4 1 ( ) 2 5 Podstawiając X = ( ) x y i wymnażając, otrzymujemy układ 2 równań liniowych 3x
Wprowadzenie do rysowania w 3D. Praca w środowisku 3D
 Wprowadzenie do rysowania w 3D 13 Praca w środowisku 3D Pierwszym krokiem niezbędnym do rozpoczęcia pracy w środowisku 3D programu AutoCad 2010 jest wybór odpowiedniego obszaru roboczego. Można tego dokonać
Wprowadzenie do rysowania w 3D 13 Praca w środowisku 3D Pierwszym krokiem niezbędnym do rozpoczęcia pracy w środowisku 3D programu AutoCad 2010 jest wybór odpowiedniego obszaru roboczego. Można tego dokonać
Robert Susmaga. Instytut Informatyki ul. Piotrowo 2 Poznań
 ... Robert Susmaga Instytut Informatyki ul. Piotrowo 2 Poznań kontakt mail owy Robert.Susmaga@CS.PUT.Poznan.PL kontakt osobisty Centrum Wykładowe, blok informatyki, pok. 7 Wyłączenie odpowiedzialności
... Robert Susmaga Instytut Informatyki ul. Piotrowo 2 Poznań kontakt mail owy Robert.Susmaga@CS.PUT.Poznan.PL kontakt osobisty Centrum Wykładowe, blok informatyki, pok. 7 Wyłączenie odpowiedzialności
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu. Mirosław Głowacki
 Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Obraz realistyczny Pojęcie obrazu realistycznego jest rozumiane w różny sposób Nie zawsze obraz realistyczny
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Obraz realistyczny Pojęcie obrazu realistycznego jest rozumiane w różny sposób Nie zawsze obraz realistyczny
TEMAT: PRZEKSZTAŁCENIA WYKRESÓW FUNKCJI PRZESUNIĘCIE O WEKTOR
 TEMAT: PRZEKSZTAŁCENIA WYKRESÓW FUNKCJI PRZESUNIĘCIE O WEKTOR W układzie współrzędnych zaznaczmy dowolny punkt A = (x, y) oraz wektor u r = [p, q]. Po przesunięciu punktu A o wektor u r otrzymamy punkt
TEMAT: PRZEKSZTAŁCENIA WYKRESÓW FUNKCJI PRZESUNIĘCIE O WEKTOR W układzie współrzędnych zaznaczmy dowolny punkt A = (x, y) oraz wektor u r = [p, q]. Po przesunięciu punktu A o wektor u r otrzymamy punkt
= i Ponieważ pierwiastkami stopnia 3 z 1 są (jak łatwo wyliczyć) liczby 1, 1+i 3
 liczby 1, 1+i 3") ZESTAW I 1. Rozwiązać równanie. Pierwiastki zaznaczyć w płaszczyźnie zespolonej. z 3 8(1 + i) 3 0, Sposób 1. Korzystamy ze wzoru a 3 b 3 (a b)(a 2 + ab + b 2 ), co daje: (z 2 2i)(z 2 + 2(1 + i)z + (1 +
ZESTAW I 1. Rozwiązać równanie. Pierwiastki zaznaczyć w płaszczyźnie zespolonej. z 3 8(1 + i) 3 0, Sposób 1. Korzystamy ze wzoru a 3 b 3 (a b)(a 2 + ab + b 2 ), co daje: (z 2 2i)(z 2 + 2(1 + i)z + (1 +
Obraz jako funkcja Przekształcenia geometryczne
 Cyfrowe przetwarzanie obrazów I Obraz jako funkcja Przekształcenia geometryczne dr. inż Robert Kazała Definicja obrazu Obraz dwuwymiarowa funkcja intensywności światła f(x,y); wartość f w przestrzennych
Cyfrowe przetwarzanie obrazów I Obraz jako funkcja Przekształcenia geometryczne dr. inż Robert Kazała Definicja obrazu Obraz dwuwymiarowa funkcja intensywności światła f(x,y); wartość f w przestrzennych
Grafika komputerowa Wykład 4 Geometria przestrzenna
 Grafika komputerowa Wykład 4 Geometria przestrzenna Instytut Informatyki i Automatyki Państwowa Wyższa Szkoła Informatyki i Przedsiębiorczości w Łomży 2 0 0 9 Spis treści Spis treści 1 Geometria 3D - podstawowe
Grafika komputerowa Wykład 4 Geometria przestrzenna Instytut Informatyki i Automatyki Państwowa Wyższa Szkoła Informatyki i Przedsiębiorczości w Łomży 2 0 0 9 Spis treści Spis treści 1 Geometria 3D - podstawowe
1. Prymitywy graficzne
 1. Prymitywy graficzne Prymitywy graficzne są elementarnymi obiektami jakie potrafi bezpośrednio rysować, określony system graficzny (DirectX, OpenGL itp.) są to: punkty, listy linii, serie linii, listy
1. Prymitywy graficzne Prymitywy graficzne są elementarnymi obiektami jakie potrafi bezpośrednio rysować, określony system graficzny (DirectX, OpenGL itp.) są to: punkty, listy linii, serie linii, listy
1 Wstęp teoretyczny. Temat: Manipulowanie przestrzenią. Grafika komputerowa 3D. Instrukcja laboratoryjna Układ współrzędnych
 Instrukcja laboratoryjna 9 Grafika komputerowa 3D Temat: Manipulowanie przestrzenią Przygotował: dr inż. Grzegorz Łukawski, mgr inż. Maciej Lasota, mgr inż. Tomasz Michno 1 Wstęp teoretyczny 1.1 Układ
Instrukcja laboratoryjna 9 Grafika komputerowa 3D Temat: Manipulowanie przestrzenią Przygotował: dr inż. Grzegorz Łukawski, mgr inż. Maciej Lasota, mgr inż. Tomasz Michno 1 Wstęp teoretyczny 1.1 Układ
Układy równań liniowych. Ax = b (1)
") Układy równań liniowych Dany jest układ m równań z n niewiadomymi. Liczba równań m nie musi być równa liczbie niewiadomych n, tj. mn. a a... a b n n a a... a b n n... a a... a b m m mn n m
Układy równań liniowych Dany jest układ m równań z n niewiadomymi. Liczba równań m nie musi być równa liczbie niewiadomych n, tj. mn. a a... a b n n a a... a b n n... a a... a b m m mn n m
Grafika 2D. Animacja Zmiany Kształtu. opracowanie: Jacek Kęsik
 Grafika 2D Animacja Zmiany Kształtu opracowanie: Jacek Kęsik Wykład przedstawia podstawy animacji zmiany kształtu - morfingu Animacja zmiany kształtu Podstawowe pojęcia Zlewanie (Dissolving / cross-dissolving)
Grafika 2D Animacja Zmiany Kształtu opracowanie: Jacek Kęsik Wykład przedstawia podstawy animacji zmiany kształtu - morfingu Animacja zmiany kształtu Podstawowe pojęcia Zlewanie (Dissolving / cross-dissolving)
3. FUNKCJA LINIOWA. gdzie ; ół,.
 1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
Przykład zastosowania poleceń 3DWYRÓWNAJ i RÓŻNICA
 Przykład zastosowania poleceń 3DWYRÓWNAJ i RÓŻNICA Polecenie 3DWYRÓWNAJ umożliwia precyzyjne przemieszczanie bryły 3D w przestrzeni projektowej Przykład poniżej pokazuje jak z pomocą poleceń - 3DWYRÓWNAJ
Przykład zastosowania poleceń 3DWYRÓWNAJ i RÓŻNICA Polecenie 3DWYRÓWNAJ umożliwia precyzyjne przemieszczanie bryły 3D w przestrzeni projektowej Przykład poniżej pokazuje jak z pomocą poleceń - 3DWYRÓWNAJ
Informatyka Stosowana. a b c d a a b c d b b d a c c c a d b d d c b a
 Działania na zbiorach i ich własności Informatyka Stosowana 1. W dowolnym zbiorze X określamy działanie : a b = b. Pokazać, że jest to działanie łączne. 2. W zbiorze Z określamy działanie : a b = a 2 +
Działania na zbiorach i ich własności Informatyka Stosowana 1. W dowolnym zbiorze X określamy działanie : a b = b. Pokazać, że jest to działanie łączne. 2. W zbiorze Z określamy działanie : a b = a 2 +
Bartosz Bazyluk SYNTEZA GRAFIKI 3D Grafika realistyczna i czasu rzeczywistego. Pojęcie sceny i kamery. Grafika Komputerowa, Informatyka, I Rok
 SYNTEZA GRAFIKI 3D Grafika realistyczna i czasu rzeczywistego. Pojęcie sceny i kamery. Grafika Komputerowa, Informatyka, I Rok Synteza grafiki 3D Pod pojęciem syntezy grafiki rozumiemy stworzenie grafiki
SYNTEZA GRAFIKI 3D Grafika realistyczna i czasu rzeczywistego. Pojęcie sceny i kamery. Grafika Komputerowa, Informatyka, I Rok Synteza grafiki 3D Pod pojęciem syntezy grafiki rozumiemy stworzenie grafiki
ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ. 1. Ciała
 ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ WSHE, O/K-CE 1. Ciała Definicja 1. Układ { ; 0, 1; +, } złożony ze zbioru, dwóch wyróżnionych elementów 0, 1 oraz dwóch działań +:, : nazywamy ciałem
ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ WSHE, O/K-CE 1. Ciała Definicja 1. Układ { ; 0, 1; +, } złożony ze zbioru, dwóch wyróżnionych elementów 0, 1 oraz dwóch działań +:, : nazywamy ciałem
Ćwiczenia nr 7. TEMATYKA: Krzywe Bézier a
 TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu. Mirosław Głowacki
 Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Zagadnienia Jak rozumiemy fotorealizm w grafice komputerowej Historyczny rozwój kart graficznych Przekształcenia
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Zagadnienia Jak rozumiemy fotorealizm w grafice komputerowej Historyczny rozwój kart graficznych Przekształcenia
Transformacje. dr Radosław Matusik. radmat
 www.math.uni.lodz.pl/ radmat Cel wykładu Celem wykładu jest prezentacja m.in. przestrzeni modelu, świata, kamery oraz projekcji, a także omówienie sposobów oświetlania i cieniowania obiektów. Pierwsze
www.math.uni.lodz.pl/ radmat Cel wykładu Celem wykładu jest prezentacja m.in. przestrzeni modelu, świata, kamery oraz projekcji, a także omówienie sposobów oświetlania i cieniowania obiektów. Pierwsze
Podstawy robotyki. Wykład II. Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska
 Podstawy robotyki Wykład II Ruch ciała sztywnego w przestrzeni euklidesowej Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Preliminaria matematyczne
Podstawy robotyki Wykład II Ruch ciała sztywnego w przestrzeni euklidesowej Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Preliminaria matematyczne
Notacja Denavita-Hartenberga
 Notacja DenavitaHartenberga Materiały do ćwiczeń z Podstaw Robotyki Artur Gmerek Umiejętność rozwiązywania prostego zagadnienia kinematycznego jest najbardziej bazową umiejętność zakresu Robotyki. Wyznaczyć
Notacja DenavitaHartenberga Materiały do ćwiczeń z Podstaw Robotyki Artur Gmerek Umiejętność rozwiązywania prostego zagadnienia kinematycznego jest najbardziej bazową umiejętność zakresu Robotyki. Wyznaczyć
Funkcje liniowe i wieloliniowe w praktyce szkolnej. Opracowanie : mgr inż. Renata Rzepińska
 Funkcje liniowe i wieloliniowe w praktyce szkolnej Opracowanie : mgr inż. Renata Rzepińska . Wprowadzenie pojęcia funkcji liniowej w nauczaniu matematyki w gimnazjum. W programie nauczania matematyki w
Funkcje liniowe i wieloliniowe w praktyce szkolnej Opracowanie : mgr inż. Renata Rzepińska . Wprowadzenie pojęcia funkcji liniowej w nauczaniu matematyki w gimnazjum. W programie nauczania matematyki w
Modelowanie i wizualizowanie 3W-grafiki. Transformacje. Aleksander Denisiuk. denisjuk@matman.uwm.edu.pl
 Modelowanie i wizualizowanie 3W-grafiki Transformacje Aleksander Denisiuk denisjuk@matman.uwm.edu.pl Uniwersytet Warmińsko-Mazurski w Olsztynie Wydział Matematyki i Informatyki ul. Słoneczna 54 10-561
Modelowanie i wizualizowanie 3W-grafiki Transformacje Aleksander Denisiuk denisjuk@matman.uwm.edu.pl Uniwersytet Warmińsko-Mazurski w Olsztynie Wydział Matematyki i Informatyki ul. Słoneczna 54 10-561
14. Przestrzenie liniowe
 14. 14.1 Sformułować definicję przestrzeni liniowej. Podać przykłady. Przestrzenią liniową nad ciałem F nazywamy czwórkę uporządkowaną (V, F,+, ), gdzie V jest zbiorem niepustym, F jest ciałem, + jest
14. 14.1 Sformułować definicję przestrzeni liniowej. Podać przykłady. Przestrzenią liniową nad ciałem F nazywamy czwórkę uporządkowaną (V, F,+, ), gdzie V jest zbiorem niepustym, F jest ciałem, + jest
Kalibracja kamery. Kalibracja kamery
 Cel kalibracji Celem kalibracji jest wyznaczenie parametrów określających zaleŝności między układem podstawowym a układem związanym z kamerą, które występują łącznie z transformacją perspektywy oraz parametrów
Cel kalibracji Celem kalibracji jest wyznaczenie parametrów określających zaleŝności między układem podstawowym a układem związanym z kamerą, które występują łącznie z transformacją perspektywy oraz parametrów
POD- I NADOKREŚLONE UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 POD- I NADOKREŚLONE UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko
POD- I NADOKREŚLONE UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko
Analiza głównych składowych- redukcja wymiaru, wykł. 12
 Analiza głównych składowych- redukcja wymiaru, wykł. 12 Joanna Jędrzejowicz Instytut Informatyki Konieczność redukcji wymiaru w eksploracji danych bazy danych spotykane w zadaniach eksploracji danych mają
Analiza głównych składowych- redukcja wymiaru, wykł. 12 Joanna Jędrzejowicz Instytut Informatyki Konieczność redukcji wymiaru w eksploracji danych bazy danych spotykane w zadaniach eksploracji danych mają
OpenGL i wprowadzenie do programowania gier
 OpenGL i wprowadzenie do programowania gier Wojciech Sterna Bartosz Chodorowski OpenGL i wprowadzenie do programowania gier Autorstwo rozdziałów: 1, 2, 3, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14 Wojciech Sterna
OpenGL i wprowadzenie do programowania gier Wojciech Sterna Bartosz Chodorowski OpenGL i wprowadzenie do programowania gier Autorstwo rozdziałów: 1, 2, 3, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14 Wojciech Sterna
2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I
![2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I](/thumbs/88/115575416.jpg "2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I") Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Reprezentacja i analiza obszarów
 Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek ciężkości ułożenie przestrzenne momenty wyższych rzędów promienie max-min centryczność
Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek ciężkości ułożenie przestrzenne momenty wyższych rzędów promienie max-min centryczność
PODSTAWY RACHUNKU WEKTOROWEGO
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Skalar Definicja Skalar wielkość fizyczna (lub geometryczna)
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Skalar Definicja Skalar wielkość fizyczna (lub geometryczna)
Geometria Analityczna w Przestrzeni
 Algebra p. 1/25 Algebra Geometria Analityczna w Przestrzeni Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045
Algebra p. 1/25 Algebra Geometria Analityczna w Przestrzeni Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045
Przekształcenia liniowe
 ALGEBRA LINIOWA 2 Wydział Mechaniczny / AIR, MTR Semestr letni 2009/2010 Prowadzący: dr Teresa Jurlewicz Przekształcenia liniowe Uwaga. W nawiasach kwadratowych podane są numery zadań znajdujących się
ALGEBRA LINIOWA 2 Wydział Mechaniczny / AIR, MTR Semestr letni 2009/2010 Prowadzący: dr Teresa Jurlewicz Przekształcenia liniowe Uwaga. W nawiasach kwadratowych podane są numery zadań znajdujących się
1. PODSTAWY TEORETYCZNE
 1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie W pierwszym wykładzie przypomnimy podstawowe działania na macierzach. Niektóre z nich zostały opisane bardziej szczegółowo w innych
1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie W pierwszym wykładzie przypomnimy podstawowe działania na macierzach. Niektóre z nich zostały opisane bardziej szczegółowo w innych
Reprezentacja i analiza obszarów
 Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek cięŝkości ułoŝenie przestrzenne momenty wyŝszych rzędów promienie max-min centryczność
Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek cięŝkości ułoŝenie przestrzenne momenty wyŝszych rzędów promienie max-min centryczność
Zad. 5: Rotacje 3D. 1 Cel ćwiczenia. 2 Program zajęć. 3 Opis zadania programowego
 Zad. 5: Rotacje 3D 1 Cel ćwiczenia Wykształcenie umiejętności modelowania kluczowych dla danego problemu pojęć. Tworzenie diagramu klas. Praktyczne zweryfikowanie wcześniejszej konstrukcji programu. Jeśli
Zad. 5: Rotacje 3D 1 Cel ćwiczenia Wykształcenie umiejętności modelowania kluczowych dla danego problemu pojęć. Tworzenie diagramu klas. Praktyczne zweryfikowanie wcześniejszej konstrukcji programu. Jeśli
Algebra liniowa z geometrią
 Algebra liniowa z geometrią Maciej Czarnecki 15 stycznia 2013 Spis treści 1 Geometria płaszczyzny 2 1.1 Wektory i skalary........................... 2 1.2 Macierze, wyznaczniki, układy równań liniowych.........
Algebra liniowa z geometrią Maciej Czarnecki 15 stycznia 2013 Spis treści 1 Geometria płaszczyzny 2 1.1 Wektory i skalary........................... 2 1.2 Macierze, wyznaczniki, układy równań liniowych.........
Ćwiczenie nr 2 - Rysowanie precyzyjne
 Ćwiczenie nr 2 - Rysowanie precyzyjne Materiały do kursu Skrypt CAD AutoCAD 2D strony: 37-46. Wprowadzenie Projektowanie wymaga budowania modelu geometrycznego zgodnie z określonymi wymiarami, a to narzuca
Ćwiczenie nr 2 - Rysowanie precyzyjne Materiały do kursu Skrypt CAD AutoCAD 2D strony: 37-46. Wprowadzenie Projektowanie wymaga budowania modelu geometrycznego zgodnie z określonymi wymiarami, a to narzuca
[ A i ' ]=[ D ][ A i ] (2.3)
![[ A i ' ]=[ D ][ A i ] (2.3)](/thumbs/71/66132002.jpg "[ A i ' ]=[ D ][ A i ] (2.3)") . WSTĘP DO TEORII SPRĘŻYSTOŚCI 1.. WSTĘP DO TEORII SPRĘŻYSTOŚCI.1. Tensory macierzy Niech macierz [D] będzie macierzą cosinusów kierunkowych [ D ]=[ i ' j ] (.1) Macierz transformowana jest równa macierzy
. WSTĘP DO TEORII SPRĘŻYSTOŚCI 1.. WSTĘP DO TEORII SPRĘŻYSTOŚCI.1. Tensory macierzy Niech macierz [D] będzie macierzą cosinusów kierunkowych [ D ]=[ i ' j ] (.1) Macierz transformowana jest równa macierzy
Grafika 2D. Przekształcenia geometryczne 2D. opracowanie: Jacek Kęsik
 Grafika 2D Przekształcenia geometrczne 2D opracowanie: Jacek Kęsik Wkład obejmuje podstawowe przekształcenia geometrczne stosowane w grafice komputerowej. Opisane są w nim również współrzędne jednorodne
Grafika 2D Przekształcenia geometrczne 2D opracowanie: Jacek Kęsik Wkład obejmuje podstawowe przekształcenia geometrczne stosowane w grafice komputerowej. Opisane są w nim również współrzędne jednorodne
Wykład 5. Metoda eliminacji Gaussa
 1 Wykład 5 Metoda eliminacji Gaussa Rozwiązywanie układów równań liniowych Układ równań liniowych może mieć dokładnie jedno rozwiązanie, nieskończenie wiele rozwiązań lub nie mieć rozwiązania. Metody dokładne
1 Wykład 5 Metoda eliminacji Gaussa Rozwiązywanie układów równań liniowych Układ równań liniowych może mieć dokładnie jedno rozwiązanie, nieskończenie wiele rozwiązań lub nie mieć rozwiązania. Metody dokładne
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu. Mirosław Głowacki
 Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Zagadnienia Jak rozumiemy fotorealizm w grafice komputerowej Historyczny rozwój kart graficznych Przekształcenia
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Zagadnienia Jak rozumiemy fotorealizm w grafice komputerowej Historyczny rozwój kart graficznych Przekształcenia
Rozdział 4. Macierze szyfrujące. 4.1 Algebra liniowa modulo 26
 Rozdział 4 Macierze szyfrujące Opiszemy system kryptograficzny oparty o rachunek macierzowy. W dalszym ciągu przypuszczamy, że dany jest 26 literowy alfabet, w którym utożsamiamy litery i liczby tak, jak
Rozdział 4 Macierze szyfrujące Opiszemy system kryptograficzny oparty o rachunek macierzowy. W dalszym ciągu przypuszczamy, że dany jest 26 literowy alfabet, w którym utożsamiamy litery i liczby tak, jak
spis treści 1 Zbiory i zdania... 5
 wstęp 1 i wiadomości wstępne 5 1 Zbiory i zdania............................ 5 Pojęcia pierwotne i podstawowe zasady 5. Zbiory i zdania 6. Operacje logiczne 7. Definicje i twierdzenia 9. Algebra zbiorów
wstęp 1 i wiadomości wstępne 5 1 Zbiory i zdania............................ 5 Pojęcia pierwotne i podstawowe zasady 5. Zbiory i zdania 6. Operacje logiczne 7. Definicje i twierdzenia 9. Algebra zbiorów
Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne.
 Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne. pytania teoretyczne:. Co to znaczy, że wektory v, v 2 i v 3
Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne. pytania teoretyczne:. Co to znaczy, że wektory v, v 2 i v 3
Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Maszyny technologiczne. dr inż. Michał Dolata
 Maszyny technologiczne 2019 dr inż. Michał Dolata www.mdolata.zut.edu.pl Układ konstrukcyjny obrabiarki 2 Układ konstrukcyjny tworzą podstawowe wzajemnie współdziałające podzespoły maszyny rozmieszczone
Maszyny technologiczne 2019 dr inż. Michał Dolata www.mdolata.zut.edu.pl Układ konstrukcyjny obrabiarki 2 Układ konstrukcyjny tworzą podstawowe wzajemnie współdziałające podzespoły maszyny rozmieszczone
Obrót wokół początku układu współrzędnych o kąt φ można wyrazić w postaci macierzowej następująco
 Transformacje na płaszczyźnie Przesunięcie Przesunięcie (translacja) obrazu realizowana jest przez dodanie stałej do każdej współrzędnej, co w postaci macierzowej można przedstawić równaniem y'] = [ x
Transformacje na płaszczyźnie Przesunięcie Przesunięcie (translacja) obrazu realizowana jest przez dodanie stałej do każdej współrzędnej, co w postaci macierzowej można przedstawić równaniem y'] = [ x
Zapisujemy:. Dla jednoczesnego podania funkcji (sposobu przyporządkowania) oraz zbiorów i piszemy:.
 oraz zbiorów i piszemy:.") Funkcja Funkcją (stosuje się też nazwę odwzorowanie) określoną na zbiorze o wartościach w zbiorze nazywamy przyporządkowanie każdemu elementowi dokładnie jednego elementu. nazywamy argumentem, zaś wartością
Funkcja Funkcją (stosuje się też nazwę odwzorowanie) określoną na zbiorze o wartościach w zbiorze nazywamy przyporządkowanie każdemu elementowi dokładnie jednego elementu. nazywamy argumentem, zaś wartością
OPISY PRZESTRZENNE I PRZEKSZTAŁCENIA
 OPISY PRZESTRZENNE I PRZEKSZTAŁCENIA Wprowadzenie W robotyce przez pojęcie manipulacji rozumiemy przemieszczanie w przestrzeni przedmiotów i narzędzi za pomocą specjalnego mechanizmu. W związku z tym pojawia
OPISY PRZESTRZENNE I PRZEKSZTAŁCENIA Wprowadzenie W robotyce przez pojęcie manipulacji rozumiemy przemieszczanie w przestrzeni przedmiotów i narzędzi za pomocą specjalnego mechanizmu. W związku z tym pojawia
Mobilne Aplikacje Multimedialne
 Mobilne Aplikacje Multimedialne Rozszerzona rzeczywistość (AR, Augmented Reality) w Systemie Android Cz.1 Krzysztof Bruniecki Podstawy Algebra liniowa, operacje na wektorach, macierzach, iloczyn skalarny
Mobilne Aplikacje Multimedialne Rozszerzona rzeczywistość (AR, Augmented Reality) w Systemie Android Cz.1 Krzysztof Bruniecki Podstawy Algebra liniowa, operacje na wektorach, macierzach, iloczyn skalarny
Bartosz Bazyluk OpenGL Współczesne podejście do programowania grafiki Część II: Programy cieniujące (shadery)
") OpenGL Współczesne podejście do programowania grafiki Część II: Programy cieniujące (shadery) Programowanie Gier Komputerowych, Informatyka S, III Rok PLAN WYKŁADU Transformacje geometryczne Pożegnanie
OpenGL Współczesne podejście do programowania grafiki Część II: Programy cieniujące (shadery) Programowanie Gier Komputerowych, Informatyka S, III Rok PLAN WYKŁADU Transformacje geometryczne Pożegnanie
GRAKO: PODSTAWY GRAFIKI 3W. Przekształcenia 3W Modelowanie Metody renderingu Przykłady
 GRAKO: PODSTAWY GRAFIKI 3W Przekształcenia 3W Modelowanie Metody renderingu Przykłady Układy współrzędnych kartezjański: P(x,y,z) sferyczny: P(r,φ,ϑ) biegunowy: P(r,φ) cylindryczny: P(ρ, φ,z) Układy współrzędnych
GRAKO: PODSTAWY GRAFIKI 3W Przekształcenia 3W Modelowanie Metody renderingu Przykłady Układy współrzędnych kartezjański: P(x,y,z) sferyczny: P(r,φ,ϑ) biegunowy: P(r,φ) cylindryczny: P(ρ, φ,z) Układy współrzędnych
Funkcje analityczne. Wykład 4. Odwzorowania wiernokątne. Paweł Mleczko. Funkcje analityczne (rok akademicki 2017/2018)
") Funkcje analityczne Wykład 4. Odwzorowania wiernokątne Paweł Mleczko Funkcje analityczne (rok akademicki 2017/2018) 1. Przekształcenia płaszczyzny Płaszczyzna jako przestrzeń liniowa, odwzorowania liniowe
Funkcje analityczne Wykład 4. Odwzorowania wiernokątne Paweł Mleczko Funkcje analityczne (rok akademicki 2017/2018) 1. Przekształcenia płaszczyzny Płaszczyzna jako przestrzeń liniowa, odwzorowania liniowe
Rzutowanie DOROTA SMORAWA
 Rzutowanie DOROTA SMORAWA Rzutowanie Rzutowanie jest operacja polegająca na tym, aby odpowiednie piksele na płaskim ekranie były wyświetlane w taki sposób, by sprawiać wrażenie trójwymiarowej głębi (przestrzeni
Rzutowanie DOROTA SMORAWA Rzutowanie Rzutowanie jest operacja polegająca na tym, aby odpowiednie piksele na płaskim ekranie były wyświetlane w taki sposób, by sprawiać wrażenie trójwymiarowej głębi (przestrzeni
GRAFIKA KOMPUTEROWA podstawy matematyczne. dr inż. Hojny Marcin pokój 406, pawilon B5 E-mail: mhojny@metal.agh.edu.pl Tel.
 GRAFIKA KOMPUTEROWA podstawy matematyczne dr inż. Hojny Marcin pokój 406, pawilon B5 E-mail: mhojny@metal.agh.edu.pl Tel. (12) 617 46 37 Plan wykładu 1/4 ZACZNIEMY OD PRZYKŁADOWYCH PROCEDUR i PRZYKŁADÓW
GRAFIKA KOMPUTEROWA podstawy matematyczne dr inż. Hojny Marcin pokój 406, pawilon B5 E-mail: mhojny@metal.agh.edu.pl Tel. (12) 617 46 37 Plan wykładu 1/4 ZACZNIEMY OD PRZYKŁADOWYCH PROCEDUR i PRZYKŁADÓW
Akademia Górniczo-Hutnicza
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Kalibracja stereowizyjnego systemu wizyjnego z użyciem pakietu Matlab Kraków, 2011 1. System stereowizyjny Stereowizja jest działem szeroko
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Kalibracja stereowizyjnego systemu wizyjnego z użyciem pakietu Matlab Kraków, 2011 1. System stereowizyjny Stereowizja jest działem szeroko
Grafika Komputerowa Wykład 5. Potok Renderowania Oświetlenie. mgr inż. Michał Chwesiuk 1/38
 Wykład 5 Potok Renderowania Oświetlenie mgr inż. 1/38 Podejście śledzenia promieni (ang. ray tracing) stosuje się w grafice realistycznej. Śledzone są promienie przechodzące przez piksele obrazu wynikowego
Wykład 5 Potok Renderowania Oświetlenie mgr inż. 1/38 Podejście śledzenia promieni (ang. ray tracing) stosuje się w grafice realistycznej. Śledzone są promienie przechodzące przez piksele obrazu wynikowego
GEOMETRIA ANALITYCZNA W PRZESTRZENI
 GEOMETRIA ANALITYCZNA W PRZESTRZENI Położenie punktu w przestrzeni określamy za pomocą trzech liczb (x, y, z). Liczby te odpowiadają rzutom na osie układu współrzędnych: każdy rzut wzdłuż płaszczyzny równoległej
GEOMETRIA ANALITYCZNA W PRZESTRZENI Położenie punktu w przestrzeni określamy za pomocą trzech liczb (x, y, z). Liczby te odpowiadają rzutom na osie układu współrzędnych: każdy rzut wzdłuż płaszczyzny równoległej
Macierzowe algorytmy równoległe
 Macierzowe algorytmy równoległe Zanim przedstawimy te algorytmy zapoznajmy się z metodami dekompozycji macierzy, możemy wyróżnić dwa sposoby dekompozycji macierzy: Dekompozycja paskowa - kolumnowa, wierszowa
Macierzowe algorytmy równoległe Zanim przedstawimy te algorytmy zapoznajmy się z metodami dekompozycji macierzy, możemy wyróżnić dwa sposoby dekompozycji macierzy: Dekompozycja paskowa - kolumnowa, wierszowa
Rozdział 8 Wzory na macierze OpenGL
 Rozdział 8 Wzory na macierze OpenGL Jacek Matulewski, wersja 2014-03-07 Dodać YawPitchRoll???? 8->7 Dalszy rozwój aplikacji w trybie rdzennym nie jest już możliwy bez zaimplementowania operacji na macierzach.
Rozdział 8 Wzory na macierze OpenGL Jacek Matulewski, wersja 2014-03-07 Dodać YawPitchRoll???? 8->7 Dalszy rozwój aplikacji w trybie rdzennym nie jest już możliwy bez zaimplementowania operacji na macierzach.
Lista. Algebra z Geometrią Analityczną. Zadanie 1 Zapisz za pomocą spójników logicznych i kwantyfikatorów: x jest większe niż 6 lub mniejsze niż 4
 Lista Algebra z Geometrią Analityczną Zadanie 1 Zapisz za pomocą spójników logicznych i kwantyfikatorów: x jest większe niż 6 lub mniejsze niż 4 jeżeli x jest podzielne przez 4 to jest podzielne przez
Lista Algebra z Geometrią Analityczną Zadanie 1 Zapisz za pomocą spójników logicznych i kwantyfikatorów: x jest większe niż 6 lub mniejsze niż 4 jeżeli x jest podzielne przez 4 to jest podzielne przez
A,B M! v V ; A + v = B, (1.3) AB = v. (1.4)
 AB = v. (1.4)") Rozdział 1 Prosta i płaszczyzna 1.1 Przestrzeń afiniczna Przestrzeń afiniczna to matematyczny model przestrzeni jednorodnej, bez wyróżnionego punktu. Można w niej przesuwać punkty równolegle do zadanego
Rozdział 1 Prosta i płaszczyzna 1.1 Przestrzeń afiniczna Przestrzeń afiniczna to matematyczny model przestrzeni jednorodnej, bez wyróżnionego punktu. Można w niej przesuwać punkty równolegle do zadanego
3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B
![3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B](/thumbs/73/69286698.jpg "3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B") 1. Dla macierzy a) A = b) A = c) A = d) A = 3 1 + i 1 i i i 0 i i 0 1 + i 1 i 0 0 0 0 1 0 1 0 1 + i 1 i Wyznaczyć macierze spełniające własność komutacji: A, X = B. Obliczyć pierwiaski z macierzy: A =
1. Dla macierzy a) A = b) A = c) A = d) A = 3 1 + i 1 i i i 0 i i 0 1 + i 1 i 0 0 0 0 1 0 1 0 1 + i 1 i Wyznaczyć macierze spełniające własność komutacji: A, X = B. Obliczyć pierwiaski z macierzy: A =
I. Potęgi. Logarytmy. Funkcja wykładnicza.
 WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY TRZECIEJ LICEUM OGÓLNOKSZTAŁCĄCEGO ZAKRES PODSTAWOWY I. Potęgi. Logarytmy. Funkcja wykładnicza. dobrą, bardzo - oblicza potęgi o wykładnikach wymiernych; - zna
WYMAGANIA EDUKACYJNE Z MATEMATYKI DLA KLASY TRZECIEJ LICEUM OGÓLNOKSZTAŁCĄCEGO ZAKRES PODSTAWOWY I. Potęgi. Logarytmy. Funkcja wykładnicza. dobrą, bardzo - oblicza potęgi o wykładnikach wymiernych; - zna
Treść wykładu. Układy równań i ich macierze. Rząd macierzy. Twierdzenie Kroneckera-Capellego.
 . Metoda eliminacji. Treść wykładu i ich macierze... . Metoda eliminacji. Ogólna postać układu Układ m równań liniowych o n niewiadomych x 1, x 2,..., x n : a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21
. Metoda eliminacji. Treść wykładu i ich macierze... . Metoda eliminacji. Ogólna postać układu Układ m równań liniowych o n niewiadomych x 1, x 2,..., x n : a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21
1. Potęgi. Logarytmy. Funkcja wykładnicza
 1. Potęgi. Logarytmy. Funkcja wykładnicza Tematyka zajęć: WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY KL. 3 POZIOM PODSTAWOWY Potęga o wykładniku rzeczywistym powtórzenie Funkcja wykładnicza i jej własności
1. Potęgi. Logarytmy. Funkcja wykładnicza Tematyka zajęć: WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY KL. 3 POZIOM PODSTAWOWY Potęga o wykładniku rzeczywistym powtórzenie Funkcja wykładnicza i jej własności
ALGEBRA LINIOWA 2. Lista zadań 2003/2004. Opracowanie : dr Teresa Jurlewicz, dr Zbigniew Skoczylas
 ALGEBRA LINIOWA 2 Lista zadań 23/24 Opracowanie : dr Teresa Jurlewicz dr Zbigniew Skoczylas Lista pierwsza Zadanie Uzasadnić z definicji że zbiór wszystkich rzeczywistych macierzy trójkątnych górnych stopnia
ALGEBRA LINIOWA 2 Lista zadań 23/24 Opracowanie : dr Teresa Jurlewicz dr Zbigniew Skoczylas Lista pierwsza Zadanie Uzasadnić z definicji że zbiór wszystkich rzeczywistych macierzy trójkątnych górnych stopnia
1 Logika (3h) 1.1 Funkcje logiczne. 1.2 Kwantyfikatory. 1. Udowodnij prawa logiczne: 5. (p q) (p q) 6. ((p q) r) (p (q r)) 3.
 1.1 Funkcje logiczne. 1.2 Kwantyfikatory. 1. Udowodnij prawa logiczne: 5. (p q) (p q) 6. ((p q) r) (p (q r)) 3.") Logika (3h). Udowodnij prawa logiczne:. (p q) ( p q). (p q) ( p q) 3. (p q) ( q p) 4. (p q) ( p q) 5. (p q) (p q) 6. ((p q) r) (p (q r)) 7. (p q) r (p r) (q r) 8. (p q) (q r) (p r). Sprawdź, czy wyrażenia:.
Logika (3h). Udowodnij prawa logiczne:. (p q) ( p q). (p q) ( p q) 3. (p q) ( q p) 4. (p q) ( p q) 5. (p q) (p q) 6. ((p q) r) (p (q r)) 7. (p q) r (p r) (q r) 8. (p q) (q r) (p r). Sprawdź, czy wyrażenia:.