Grafika komputerowa i wizualizacja. dr Wojciech Pałubicki
|
|
|
- Renata Olszewska
- 8 lat temu
- Przeglądów:
Transkrypt
1 Grafika komputerowa i wizualizacja dr Wojciech Pałubicki
2 Grafika komputerowa Obrazy wygenerowane za pomocy komputera Na tych zajęciach skupiamy się na obrazach wygenerowanych ze scen 3D do interaktywnych aplikacji 3D scena Rendering 2D obraz

3 Filmy, specjalne efekty

4 Filmy, specjalne efekty

5 Gry komputerowe
6 Symulacje
7 Symulacje

8 CAD & CAM Design

9 Architecture

10 Wirtualna Rzeczywistość
11 Wizualizacja

12 Medical Imaging
13 Education

14 Geographic Info Systems & GPS


15 Aplikacje
16 Wyświetlacz Podstawowe specyfikacje do wyświetlania obrazów na komputerach to OpenGL i Direct3D 2D, Illustrator, Flash, Fonts,
17 Co się nauczycie Podstawy komputerowej grafiki Potok graficzny (jak z sceny 3D stworzyć obraz 2D) Podstawy specyfikacji OpenGL Doświadczenie w C++ Podstawy języka programistycznego GLSL który stosuje moc obliczeniowa karty graficznej
18 Zaliczenie GRK Sprawdziany na ćwiczeniach co dwa tygodnie (70%)
19 Zaliczenie GRK Sprawdziany na ćwiczeniach co dwa tygodnie (70%) Projekt zaliczeniowy (30%)
20 Zaliczenie GRK Sprawdziany na ćwiczeniach co dwa tygodnie (70%) Projekt zaliczeniowy (30%) Informacje na stronie: wp.faculty.wmi.amu.edu.pl/grk.html

21 Jak przedstawić obiekty 3D?
22 System współrzędny 2D +y -x +x -y
23 System współrzędny 2D +y -x 1 3 +x -y
24 System współrzędny 2D +y -x 1 3 +x -y
25 System współrzędny 2D +y -x 1 3 +x -y
26 System współrzędny 2D +y -x 1 3 P(3, 1) +x -y
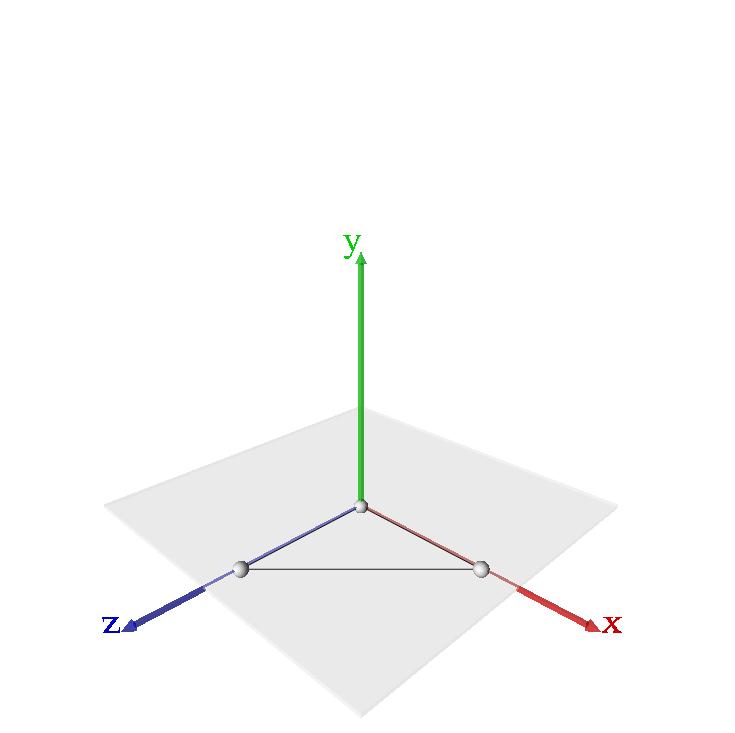
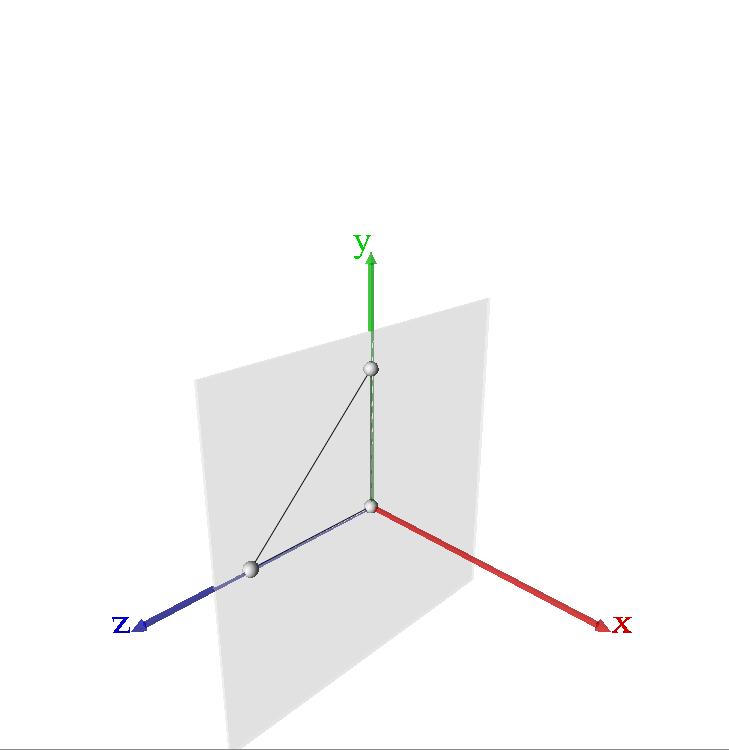
27 System współrzędny 3D +y -z -x +x +z -y
28 System współrzędny 3D +y -z P(3, 2, 2.5) -x +x +z -y
29 System współrzędny 3D +y -z P(3, 2, 2.5) -x 2.5 +x +z -y
30 System współrzędny 3D +y -z P(3, 2, 2.5) -x 2.5 +x +z -y
31 System współrzędny 3D +y -z P(3, 2, 2.5) -x 2.5 +x +z -y
32 Przykład: Piramida
33 Przykład: Piramida a(0, 1, 0)
34 Przykład: Piramida a(0, 1, 0) b(0, 0, 1)
35 Przykład: Piramida a(0, 1, 0) b(0, 0, 1) c(1, 0, 0)
36 Przykład: Piramida a(0, 1, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0)
37 Przykład: Piramida a(0, 1, 0) e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0)
38 Powierzchnia (face) a(0, 1, 0) e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0)
39 Powierzchnia (face) a(0, 1, 0) e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0) Na przykład: (0, 1, 0) (0, 0, 1) (1, 0, 0)
40 Powierzchnia (face) a(0, 1, 0) e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0) Na przykład: (0, 1, 0) (0, 0, 1) (1, 0, 0) albo (0, 1, 0) (1, 0, 0) (0, 0, -1)
41 Powierzchnia (face) Problem: duplikacja wierzchołków! a(0, 1, 0) e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0) Na przykład: (0, 1, 0) (0, 0, 1) (1, 0, 0) albo (0, 1, 0) (1, 0, 0) (0, 0, -1)
42 Rozwiązanie: nowa struktura danych Bufor wierzchołków przechowuje wierzchołki (vertex buffer): a(0, 1, 0) e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0)
43 Rozwiązanie: nowa struktura danych Bufor wierzchołków przechowuje wierzchołki (vertex buffer): a(0, 1, 0) [(0,1,0), (0,0,1), (1,0,0), (0,0,-1), (-1,0,0)] e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0)
44 Rozwiązanie: nowa struktura danych Bufor wierzchołków przechowuje wierzchołki (vertex buffer): a(0, 1, 0) [(0,1,0), (0,0,1), (1,0,0), (0,0,-1), (-1,0,0)] e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0)
45 Rozwiązanie: nowa struktura danych Bufor wierzchołków przechowuje wierzchołki (vertex buffer): a(0, 1, 0) [(0,1,0), (0,0,1), (1,0,0), (0,0,-1), (-1,0,0)] e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0) Na przykład: (0, 1, 2)
46 Rozwiązanie: nowa struktura danych Bufor wierzchołków przechowuje wierzchołki (vertex buffer): a(0, 1, 0) [(0,1,0), (0,0,1), (1,0,0), (0,0,-1), (-1,0,0)] e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0) Na przykład: (0, 1, 2)
47 Rozwiązanie: nowa struktura danych Bufor wierzchołków przechowuje wierzchołki (vertex buffer): a(0, 1, 0) [(0,1,0), (0,0,1), (1,0,0), (0,0,-1), (-1,0,0)] e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0) Na przykład: (0, 1, 2) lub (0, 2, 3)
48 Rozwiązanie: nowa struktura danych Bufor wierzchołków przechowuje wierzchołki (vertex buffer): a(0, 1, 0) [(0,1,0), (0,0,1), (1,0,0), (0,0,-1), (-1,0,0)] e(-1, 0, 0) d(0, 0, -1) b(0, 0, 1) c(1, 0, 0)
49 Trójkąty Spód piramidy
50 Trójkąty Spód piramidy
51 Trójkąty - współpłaszczyznowość
52 Trójkąty - współpłaszczyznowość
53 Trójkąty - współpłaszczyznowość

54 Aproksymacja kształtów trójkątami

55 Aproksymacja kształtów trójkątami

56 Aproksymacja kształtów trójkątami

57 Aproksymacja kształtów trójkątami
58 Wszechświat z wielokątów (trójkątów)


59 Wszechświat z wielokątów (trójkątów)

60 Przemieszczanie wierzchołków?
61 Przemieszczanie wierzchołków - Transformacje Skalowanie
62 Przemieszczanie wierzchołków - Transformacje Skalowanie Rotacja
63 Przemieszczanie wierzchołków - Transformacje Skalowanie Rotacja Translacja

64 Transformacja f: X Y

65 Transformacja f: X Y Funkcje o wartościach wektorowych R n = { x 1,, x n : x 1,, x n R}
66 Transformacja - przykład f: R 3 R 2 f x 1 x 2 = x 1 + 2x 2 x 3x 3 3 f = = 3 3
67 Transformacja - przykład f: R 3 R 2 f x 1 x 2 = x 1 + 2x 2 x 3x 3 3 f = = 3 3
68 Transformacja - przykład f: R 3 R 2 f x 1 x 2 = x 1 + 2x 2 x 3x 3 3 f = = 3 3
69 Transformacja - przykład f: R 3 R 2 f x 1 x 2 = x 1 + 2x 2 x 3x 3 3 f = = 3 3
70 Transformacja - przykład f: R 3 R 2 f x 1 x 2 = x 1 + 2x 2 x 3x 3 3 f = = 3 3
71 Skalowanie +y f x y = x s x y s y a(0, 1) -x c(-1, 0) b(1, 0) +x -y
72 Skalowanie +y f x y = x 2 y 1 a(0, 1) -x c(-1, 0) b(1, 0) +x -y
73 Skalowanie +y f b = = 2 0 a(0, 1) -x c(-1, 0) b(1, 0) +x -y
74 Skalowanie +y f b = = 2 0 a(0, 1) -x c(-1, 0) b(2, 0) +x -y
75 Skalowanie +y f Ԧc = = 2 0 a(0, 1) -x c(-1, 0) b(2, 0) +x -y
76 Skalowanie +y f Ԧc = = 2 0 a(0, 1) -x c(-2, 0) b(2, 0) +x -y
77 Skalowanie +y f Ԧa = = 0 1 a(0, 1) -x c(-2, 0) b(2, 0) +x -y
78 Skalowanie - XY +y f x y = x 0.5 y 0.5 a(0, 1) -x c(-1, 0) b(1, 0) +x -y
79 Skalowanie - XY +y f x y = x 0.5 y 0.5 a(0, 0.5) -x c(-0.5, 0) b(0.5, 0) +x -y
80 Translacja +y f x y = x + T x y + T y a(0, 1) -x c(-1, 0) b(1, 0) +x -y
81 Translacja +y f x y = x + 1 y a(0, 1) -x c(-1, 0) b(1, 0) +x -y
82 Translacja +y f b = x + 1 y = 2 0 a(0, 1) -x c(-1, 0) b(1, 0) +x -y
83 Translacja +y f b = = 2 0 a(0, 1) -x c(-1, 0) b(2, 0) +x -y
84 Translacja +y f Ԧa = = 1 1 a(1, 1) -x c(-1, 0) b(2, 0) +x -y
85 Translacja +y f Ԧc = = 0 0 a(1, 1) -x c(0, 0) b(2, 0) +x -y
86 Translacja - XY +y f x y = x 1 y 1 a(0, 1) -x c(-1, 0) b(1, 0) +x -y
87 Translacja - XY +y f x y = x 1 y 1 -x a(-1, 0) +x c(-2, -1) b(0, -1) -y
88 Rotacja +y a(0, 1) -x c(-1, 0) b(1, 0) +x -y
89 Rotacja δ = 90 +y b(0, 1) -x a(-1, 0) +x c(0, -1) -y
90 Rotacja o kąt δ Współrzędne biegunowe: x = r cos θ y = r sin θ
91 Rotacja o kąt δ Współrzędne biegunowe: x = r cos θ y = r sin θ x = r cos θ + δ y = r sin θ + δ
92 Rotacja o kąt δ Współrzędne biegunowe: x = r cos θ y = r sin θ x = r cos θ + δ = r cos θ cos δ r sin θ sin(δ) y = r sin θ + δ = r sin θ cos δ + r cos θ sin(δ)
 y = r sin θ + δ = r sin θ cos δ + r cos θ sin(δ) x = x cos δ y = x sin δ y sin(δ) + y cos δ")
93 Rotacja o kąt δ Współrzędne biegunowe: x = r cos θ y = r sin θ x = r cos θ + δ = r cos θ cos δ r sin θ sin(δ) y = r sin θ + δ = r sin θ cos δ + r cos θ sin(δ) x = x cos δ y = x sin δ y sin(δ) + y cos δ
94 Rotacja Θ = 90 +y f x y = x cos θ y sin(θ) x sin θ + y cos θ a(0, 1) -x c(-1, 0) b(1, 0) +x -y
95 Rotacja Θ = 90 +y a(0, 1) f x y = x cos θ y sin(θ) x sin θ + y cos θ f b = = 0 1 -x c(-1, 0) b(1, 0) +x -y
96 Rotacja Θ = 90 +y a(0, 1) f x y = x cos θ y sin(θ) x sin θ + y cos θ f Ԧa = = 1 0 -x c(-1, 0) b(1, 0) +x -y
97 Rotacja Θ = 90 +y a(0, 1) f x y = x cos θ y sin(θ) x sin θ + y cos θ f Ԧc = = 0 1 -x c(-1, 0) b(1, 0) +x -y
98 Rotacja Θ = 90 b(0, 1) +y f x y = x cos θ y sin(θ) x sin θ + y cos θ f Ԧc = = 0 1 -x a(-1, 0) +x c(0, -1) -y
99 Rotacja wobec środka obiektu +y -x +x -y
100 Rotacja wobec środka obiektu Translacja do początku +y -x +x -y
101 Rotacja wobec środka obiektu Rotacja +y -x +x -y
102 Rotacja wobec środka obiektu Translacja z powrotem do środka +y -x +x -y
103 Jak zastosować transformacje jednocześnie? +y +y -x +x Translacja -x +x -y +y -y +y Rotacja -x +x Translacja -x +x -y -y
104 Jak zastosować transformacje jednocześnie? +y +y -x +x Transformacja -x +x -y -y

105 Macierz wektor produkt jako Transformacja T: R n R m T Ԧx = A Ԧx
106 Macierz wektor produkt jako Transformacja T: R 2 R 2
107 Macierz wektor produkt jako Transformacja T: R 2 R 2 B = T Ԧx = B Ԧx = x 1 x 2 = 2x 1 x 2 3x 1 + 4x 2 T x 1 x 2 = 2x 1 x 2 3x 1 + 4x 2
108 Macierz wektor produkt jako Transformacja T: R 2 R 2 B = T Ԧx = B Ԧx = x 1 x 2 = 2x 1 x 2 3x 1 + 4x 2 T x 1 x 2 = 2x 1 x 2 3x 1 + 4x 2
109 Macierz wektor produkt jako Transformacja T: R 2 R 2 B = T Ԧx = B Ԧx = x 1 x 2 = 2x 1 x 2 3x 1 + 4x 2 T x 1 x 2 = 2x 1 x 2 3x 1 + 4x 2
110 Macierz wektor produkt jako Transformacja T: R 2 R 2 B = T Ԧx = B Ԧx = x 1 x 2 = 2x 1 x 2 3x 1 + 4x 2 T x 1 x 2 = 2x 1 x 2 3x 1 + 4x 2
111 Macierz wektor produkt jako Transformacja T: R 2 R 2 B = T Ԧx = B Ԧx = x 1 x 2 = 2x 1 x 2 3x 1 + 4x 2 T x 1 x 2 = 2x 1 x 2 3x 1 + 4x 2
112 Skalowanie 2D Macierz skalowania: P = s x 0 0 s y x y = s x 0 0 s y s x x + 0 y 0 x + s y y = s x x s y y
113 Rotacja 2D Macierz rotacji: cos(θ) sin(θ) sin(θ) cos(θ) P = cos(π/4) sin(π/4) sin(π/4) cos(π/4) 1 0 = = 0 1
114 Konkatenacja Macierzy Transformacji P = s x 0 0 s y x y = s xx s y y = x y P = cos θ sin θ sin θ cos θ x y = cos θ s x x sin θ s y y sin θ s x x + cos θ s y y To jest to samo co P = cos θ sin θ sin θ cos θ s x 0 0 s y x y = s xcos θ s x sin θ s y sin θ s y cos θ x y
115 Konkatenacja Macierzy Transformacji P = s x 0 0 s y x y = s xx s y y = x y P = cos θ sin θ sin θ cos θ x y = cos θ s x x sin θ s y y sin θ s x x + cos θ s y y To jest to samo co P = cos θ sin θ sin θ cos θ s x 0 0 s y x y = s xcos θ s x sin θ s y sin θ s y cos θ x y
116 Konkatenacja Macierzy Transformacji P = s x 0 0 s y x y = s xx s y y = x y P = cos θ sin θ sin θ cos θ x y = cos θ s x x sin θ s y y sin θ s x x + cos θ s y y To jest to samo co P = cos θ sin θ sin θ cos θ s x 0 0 s y x y = s xcos θ s x sin θ s y sin θ s y cos θ x y
117 Konkatenacja Macierzy Transformacji P = s x 0 0 s y x y = s xx s y y = x y P = cos θ sin θ sin θ cos θ x y = cos θ s x x sin θ s y y sin θ s x x + cos θ s y y To jest to samo co P = cos θ sin θ sin θ cos θ s x 0 0 s y x y = s xcos θ s x sin θ s y sin θ s y cos θ x y
118 Konkatenacja Macierzy Transformacji P = s x 0 0 s y x y = s xx s y y = x y P = cos θ sin θ sin θ cos θ x y = cos θ s x x sin θ s y y sin θ s x x + cos θ s y y To jest to samo co P = cos θ sin θ sin θ cos θ s x 0 0 s y x y = s xcos θ s x sin θ s y sin θ s y cos θ x y
119 Konkatenacja Macierzy Transformacji P = s x 0 0 s y x y = s xx s y y = x y P = cos θ sin θ sin θ cos θ x y = cos θ s x x sin θ s y y sin θ s x x + cos θ s y y To jest to samo co (łączność multiplikacji macierzy) P = cos θ sin θ sin θ cos θ s x 0 0 s y x y = s xcos θ s x sin θ s y sin θ s y cos θ x y
120 Konkatenacja Macierzy Transformacji P = s x 0 0 s y x y = s xx s y y = x y P = cos θ sin θ sin θ cos θ x y = cos θ s x x sin θ s y y sin θ s x x + cos θ s y y To jest to samo co (łączność multiplikacji macierzy) P = cos θ sin θ sin θ cos θ s x 0 0 s y x y = cos θ s x x sin θ s y y sin θ s x x + cos θ s y y x y
121 Translacja f x y = x + T x y + T y
122 Translacja f x y = x + T x y + T y nie da się wyrazić takiej transformacji jako multiplikacja z 2D macierzą
123 Translacja f x y = x + T x y + T y nie da się wyrazić takiej transformacji jako multiplikacja z 2D macierzą Dlatego osadzamy naszą przestrzeń 2D w 3D, gdzie trzecia współrzędna z będzie równa 1. x y x y 1

124 Geometryczna interpretacja Translacji 2D
125 Translacja T(T x, T y ) x y 1 = 1 0 T x 0 1 T y x y 1
126 Translacja T(T x, T y ) x y 1 = 1 0 T x 0 1 T y x y 1 Co daje: x = x + 1 T x y = y + 1 T y 1 = 1
127 Skalowanie, Rotacja i Translacja w 2D S(s x, s y ) = s x s y T(T x, T y ) = 1 0 T x 0 1 T y R(θ) = cos(θ) sin(θ) 0 sin(θ) cos(θ)
128 Rotacja wobec środka obiektu +y +y -x +x Translacja -x +x -y +y -y +y Rotacja -x +x Translacja -x +x -y -y
129 Macierz rotacji M wobec punktu P 0 (x 0, y 0 )
130 Macierz rotacji M wobec punktu P 0 (x 0, y 0 ) 1. Translacja do początku: T( x 0, y 0 )
131 Macierz rotacji M wobec punktu P 0 (x 0, y 0 ) 1. Translacja do początku: T( x 0, y 0 ) 2. Rotacja o kąt θ: R θ
132 Macierz rotacji M wobec punktu P 0 (x 0, y 0 ) 1. Translacja do początku: T( x 0, y 0 ) 2. Rotacja o kąt θ: R θ 3. Translacja do punktu P 0 : T x 0, y 0
133 Macierz rotacji M wobec punktu P 0 (x 0, y 0 ) 1. Translacja do początku: T( x 0, y 0 ) 2. Rotacja o kąt θ: R θ 3. Translacja do punktu P 0 : T x 0, y 0 M = T x 0, y 0 R θ T( x 0, y 0 )
134 Macierz rotacji M wobec punktu P 0 (x 0, y 0 ) 1. Translacja do początku: T( x 0, y 0 ) 2. Rotacja o kąt θ: R θ 3. Translacja do punktu P 0 : T x 0, y 0 M = T x 0, y 0 R θ T x 0, y 0 M = 1 0 x y cos θ sin θ 0 sin θ cos θ x y
135 Macierz rotacji M wobec punktu P 0 (x 0, y 0 ) 1. Translacja do początku: T( x 0, y 0 ) 2. Rotacja o kąt θ: R θ 3. Translacja do punktu P 0 : T x 0, y 0 M = T x 0, y 0 R θ T x 0, y 0 M = cos(θ) sin θ cos θ x 0 + sin θ y 0 + x 0 sin θ cos θ sin θ x 0 cos θ y 0 + y
136 Macierz rotacji M wobec punktu P 0 (x 0, y 0 ) 1. Translacja do początku: T( x 0, y 0 ) 2. Rotacja o kąt θ: R θ 3. Translacja do punktu P 0 : T x 0, y 0 M = T x 0, y 0 R θ T( x 0, y 0 ) +y +y M -x +x -x +x -y -y
137 Efektywność Macierzy Kompozycji M
138 Efektywność Macierzy Kompozycji M Multiplikacja dwóch macierzy: 3 multiplikacje (*) i 2 addycje (+) dla każdego elementu 3 x 9 = 27 (+ są kilka razy szybsze od * czyli ignorujemy ich koszt)
139 Efektywność Macierzy Kompozycji M Multiplikacja dwóch macierzy: 3 multiplikacje (*) i 2 addycje (+) dla każdego elementu 3 x 9 = 27 (+ są kilka razy szybsze od * czyli ignorujemy ich koszt) Multiplikacja macierz wektor 3 x 3 = 9
140 Efektywność Macierzy Kompozycji M Multiplikacja dwóch macierzy: 3 multiplikacje (*) i 2 addycje (+) dla każdego elementu 3 x 9 = 27 (+ są kilka razy szybsze od * czyli ignorujemy ich koszt) Multiplikacja macierz wektor 3 x 3 = 9, ale mamy specjalny przypadek x a b c x y = d e f y
141 Efektywność Macierzy Kompozycji M Multiplikacja dwóch macierzy: 3 multiplikacje (*) i 2 addycje (+) dla każdego elementu 3 x 9 = 27 (+ są kilka razy szybsze od * czyli ignorujemy ich koszt) Multiplikacja macierz wektor 3 x 3 = 9, ale mamy specjalny przypadek x a b c x x = ax + by + c y = d e f y y = cx + dy + e
142 Efektywność Macierzy Kompozycji M Multiplikacja dwóch macierzy: 3 multiplikacje (*) i 2 addycje (+) dla każdego elementu 3 x 9 = 27 (+ są kilka razy szybsze od * czyli ignorujemy ich koszt) Multiplikacja macierz wektor 3 x 3 = 9, ale mamy specjalny przypadek x a b c x x = ax + by + c y = d e f y y = cx + dy + e operacje dla każdego wierzchołka
143 Efektywność Macierzy Kompozycji M Gdy N liczba transformacji Gdy k liczba wierzchołków
144 Efektywność Macierzy Kompozycji M Gdy N liczba transformacji Gdy k liczba wierzchołków Wtedy liczba multiplikacji wykonanych jest: (N-1)*27 + 4*k
145 Efektywność Macierzy Kompozycji M Gdy N liczba transformacji Gdy k liczba wierzchołków Wtedy liczba multiplikacji wykonanych jest: (N-1)*27 + 4*k W sposób bezpośredni: N*k*2
146 World space transformation WS Object Space World Space

147 View (eye) space transformation
148 View (eye) space transformation
149 Projection transformation
150 Clipping +y -x +x -y
151 Clipping +y -x +x -y
152 Clipping +y -x +x -y
153 Scan conversion or rasterization +y -x +x -y
154 Scan conversion or rasterization +y -x +x -y
155 Scan conversion or rasterization +y -x +x -y
156 Scan conversion or rasterization
157 Uproszczony Potok Graficzny (Rendering) Object Space
158 Uproszczony Potok Graficzny (Rendering) Model Matrix Object Space World Space
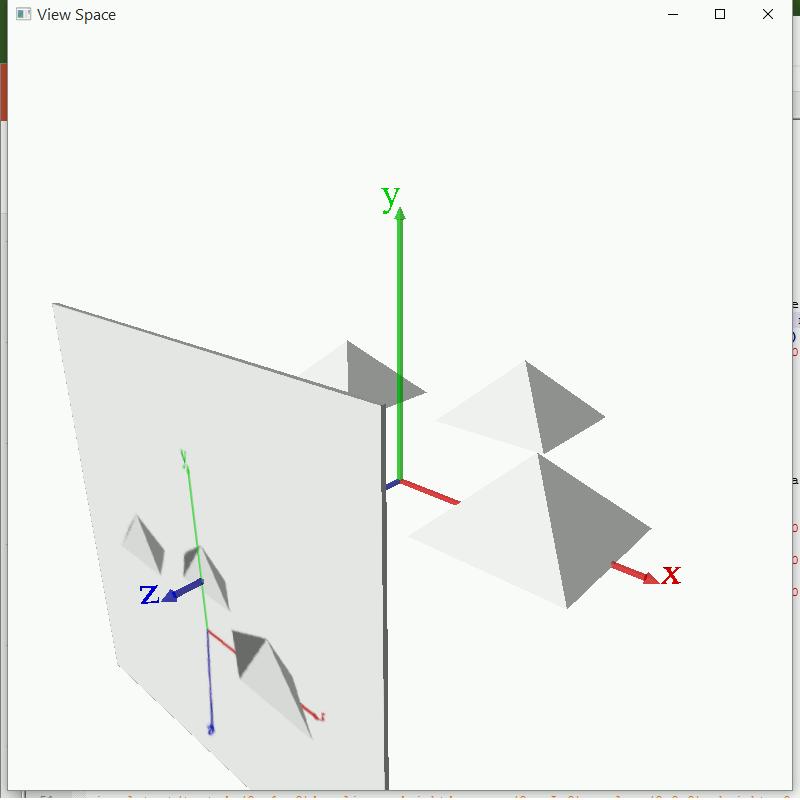
159 Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Object Space World Space View Space
160 Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Object Space World Space View Space Clip Space

161 Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen/Window Space
GRK 2. dr Wojciech Palubicki
 GRK dr Wojciech Palubicki Macierz wektor produkt jako Transformacja T: R n R m T Ԧx = A Ԧx Przemieszczanie wierzchołków - Transformacje Skalowanie Rotacja Translacja -y -y Macierz rotacji M wobec punktu
GRK dr Wojciech Palubicki Macierz wektor produkt jako Transformacja T: R n R m T Ԧx = A Ԧx Przemieszczanie wierzchołków - Transformacje Skalowanie Rotacja Translacja -y -y Macierz rotacji M wobec punktu
GRK 4. dr Wojciech Palubicki
 GRK 4 dr Wojciech Palubicki Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space Projection
GRK 4 dr Wojciech Palubicki Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space Projection
Grafika Komputerowa Wykład 4. Synteza grafiki 3D. mgr inż. Michał Chwesiuk 1/30
 Wykład 4 mgr inż. 1/30 Synteza grafiki polega na stworzeniu obrazu w oparciu o jego opis. Synteza obrazu w grafice komputerowej polega na wykorzystaniu algorytmów komputerowych do uzyskania obrazu cyfrowego
Wykład 4 mgr inż. 1/30 Synteza grafiki polega na stworzeniu obrazu w oparciu o jego opis. Synteza obrazu w grafice komputerowej polega na wykorzystaniu algorytmów komputerowych do uzyskania obrazu cyfrowego
GRK 3. Dr Wojciech Palubicki
 GRK 3 Dr Wojciech Palubicki Potok graficzny Potok graficzny World Space View Space Orthographic view Window space Canonincal view Potok graficzny World Space View Space Orthographic view Canonincal view
GRK 3 Dr Wojciech Palubicki Potok graficzny Potok graficzny World Space View Space Orthographic view Window space Canonincal view Potok graficzny World Space View Space Orthographic view Canonincal view
GRK 5. dr Wojciech Palubicki
 GRK 5 dr Wojciech Palubicki Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space Projection
GRK 5 dr Wojciech Palubicki Uproszczony Potok Graficzny (Rendering) Model Matrix View Matrix Projection Matrix Viewport Transform Object Space World Space View Space Clip Space Screen Space Projection
GRK 5. dr Wojciech Palubicki
 GRK 5 dr Wojciech Palubicki Projekty (dwu-osobowe) Napisać symulacje lotu kosmicznego w OpenGLu: Korzystając tylko z bibliotek które na ćwiczeniach zostały omówione Interaktywna symulacja Wszystkie wielokąty
GRK 5 dr Wojciech Palubicki Projekty (dwu-osobowe) Napisać symulacje lotu kosmicznego w OpenGLu: Korzystając tylko z bibliotek które na ćwiczeniach zostały omówione Interaktywna symulacja Wszystkie wielokąty
Grafika komputerowa i wizualizacja
 Grafika komputerowa i wizualizacja Radosław Mantiuk ( rmantiuk@wi.zut.edu.pl, p. 315 WI2) http://rmantiuk.zut.edu.pl Katedra Systemów Multimedialnych Wydział Informatyki, Zachodniopomorski Uniwersytet
Grafika komputerowa i wizualizacja Radosław Mantiuk ( rmantiuk@wi.zut.edu.pl, p. 315 WI2) http://rmantiuk.zut.edu.pl Katedra Systemów Multimedialnych Wydział Informatyki, Zachodniopomorski Uniwersytet
i = [ 0] j = [ 1] k = [ 0]
![i = [ 0] j = [ 1] k = [ 0]](/thumbs/70/62901734.jpg "i = [ 0] j = [ 1] k = [ 0]") Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
Karta przedmiotu. Podstawy programowania procesorów graficznych. realizowanego w ramach projektu PO WER
 Karta przedmiotu Podstawy programowania procesorów graficznych realizowanego w ramach projektu PO WER 2017-2019 Wydział Inżynierii Elektrycznej i Komputerowej Kierunek studiów: Informatyka Profil: Ogólnoakademicki
Karta przedmiotu Podstawy programowania procesorów graficznych realizowanego w ramach projektu PO WER 2017-2019 Wydział Inżynierii Elektrycznej i Komputerowej Kierunek studiów: Informatyka Profil: Ogólnoakademicki
Transformacje obiektów 3D
 Synteza i obróbka obrazu Transformacje obiektów 3D Opracowanie: dr inż. Grzegorz Szwoch Politechnika Gdańska Katedra Systemów Multimedialnych Lokalny układ współrzędnych Tworząc model obiektu, zapisujemy
Synteza i obróbka obrazu Transformacje obiektów 3D Opracowanie: dr inż. Grzegorz Szwoch Politechnika Gdańska Katedra Systemów Multimedialnych Lokalny układ współrzędnych Tworząc model obiektu, zapisujemy
GRAFIKA CZASU RZECZYWISTEGO Podstawy syntezy grafiki 3D i transformacji geometrycznych
 GRAFIKA CZASU RZECZYWISTEGO Podstawy syntezy grafiki 3D i transformacji geometrycznych Grafika komputerowa i wizualizacja, Bioinformatyka S1, II Rok Synteza grafiki 3D Pod pojęciem syntezy grafiki rozumiemy
GRAFIKA CZASU RZECZYWISTEGO Podstawy syntezy grafiki 3D i transformacji geometrycznych Grafika komputerowa i wizualizacja, Bioinformatyka S1, II Rok Synteza grafiki 3D Pod pojęciem syntezy grafiki rozumiemy
Wykład 4. Rendering (1) Informacje podstawowe
 Informacje podstawowe") Wykład 4. Rendering (1) Informacje podstawowe Z punktu widzenia dzisiejszego programowania gier: Direct3D jest najczęściej wykorzystywanym przez profesjonalnych deweloperów gier API graficznym na platformie
Wykład 4. Rendering (1) Informacje podstawowe Z punktu widzenia dzisiejszego programowania gier: Direct3D jest najczęściej wykorzystywanym przez profesjonalnych deweloperów gier API graficznym na platformie
Wprowadzenie do grafiki komputerowej. W. Alda
 Wprowadzenie do grafiki komputerowej W. Alda Grafika komputerowa w pigułce Zacznijmy od tego co widać na ekranie Grafika rastrowa 2D Spektrum fal elektromagnetycznych Promieniowanie gamma ~ 10-12 m Fale
Wprowadzenie do grafiki komputerowej W. Alda Grafika komputerowa w pigułce Zacznijmy od tego co widać na ekranie Grafika rastrowa 2D Spektrum fal elektromagnetycznych Promieniowanie gamma ~ 10-12 m Fale
System graficzny. Potok graficzny 3D. Scena 3D Zbiór trójwymiarowych danych wejściowych wykorzystywanych do wygenerowania obrazu wyjściowego 2D.
 System graficzny scena 3D algorytm graficzny obraz 2D Potok graficzny 3D Radosław Mantiuk Dane wejściowe Algorytm tworzący obraz wyjściowy na podstawie sceny 3D Dane wyjściowe Wydział Informatyki Zachodniopomorski
System graficzny scena 3D algorytm graficzny obraz 2D Potok graficzny 3D Radosław Mantiuk Dane wejściowe Algorytm tworzący obraz wyjściowy na podstawie sceny 3D Dane wyjściowe Wydział Informatyki Zachodniopomorski
Analiza Matematyczna Praca domowa
 Analiza Matematyczna Praca domowa J. de Lucas Zadanie 1. Pokazać, że dla wszystkich n naturalnych ( n ) exp kx k dx 1 dx n = 1 n (e k 1). (0,1) n k=1 n! k=1 Zadanie. Obliczyć dla dowolnego n. (0,1) n (x
Analiza Matematyczna Praca domowa J. de Lucas Zadanie 1. Pokazać, że dla wszystkich n naturalnych ( n ) exp kx k dx 1 dx n = 1 n (e k 1). (0,1) n k=1 n! k=1 Zadanie. Obliczyć dla dowolnego n. (0,1) n (x
Bartosz Bazyluk SYNTEZA GRAFIKI 3D Grafika realistyczna i czasu rzeczywistego. Pojęcie sceny i kamery. Grafika Komputerowa, Informatyka, I Rok
 SYNTEZA GRAFIKI 3D Grafika realistyczna i czasu rzeczywistego. Pojęcie sceny i kamery. Grafika Komputerowa, Informatyka, I Rok Synteza grafiki 3D Pod pojęciem syntezy grafiki rozumiemy stworzenie grafiki
SYNTEZA GRAFIKI 3D Grafika realistyczna i czasu rzeczywistego. Pojęcie sceny i kamery. Grafika Komputerowa, Informatyka, I Rok Synteza grafiki 3D Pod pojęciem syntezy grafiki rozumiemy stworzenie grafiki
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu. Mirosław Głowacki
 Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Obraz realistyczny Pojęcie obrazu realistycznego jest rozumiane w różny sposób Nie zawsze obraz realistyczny
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Obraz realistyczny Pojęcie obrazu realistycznego jest rozumiane w różny sposób Nie zawsze obraz realistyczny
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2013/2014
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 013/014 Kierunek studiów: Informatyka Stosowana Forma
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 013/014 Kierunek studiów: Informatyka Stosowana Forma
Wprowadzenie. Artur Staszczyk Bartłomiej Filipek
 Wprowadzenie Artur Staszczyk www.astaszczyk.com Bartłomiej Filipek www.bartlomiejfilipek.pl Bartlomiej.filipek@gmail.com Podstawy grafiki 3D GPU Co to jest OpenGL Potok Graficzny Inicjalizacja Rendering
Wprowadzenie Artur Staszczyk www.astaszczyk.com Bartłomiej Filipek www.bartlomiejfilipek.pl Bartlomiej.filipek@gmail.com Podstawy grafiki 3D GPU Co to jest OpenGL Potok Graficzny Inicjalizacja Rendering
Modelowanie i wstęp do druku 3D Wykład 1. Robert Banasiak
 Modelowanie i wstęp do druku 3D Wykład 1 Robert Banasiak Od modelu 3D do wydruku 3D Typowa droga...czasem wyboista... Pomysł!! Modeler 3D Przygotowanie modelu do druku Konfiguracja Programu do drukowania
Modelowanie i wstęp do druku 3D Wykład 1 Robert Banasiak Od modelu 3D do wydruku 3D Typowa droga...czasem wyboista... Pomysł!! Modeler 3D Przygotowanie modelu do druku Konfiguracja Programu do drukowania
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu. Mirosław Głowacki
 Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Zagadnienia Jak rozumiemy fotorealizm w grafice komputerowej Historyczny rozwój kart graficznych Przekształcenia
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Zagadnienia Jak rozumiemy fotorealizm w grafice komputerowej Historyczny rozwój kart graficznych Przekształcenia
Plan wykładu. Akcelerator 3D Potok graficzny
 Plan wykładu Akcelerator 3D Potok graficzny Akcelerator 3D W 1996 r. opracowana została specjalna karta rozszerzeń o nazwie marketingowej Voodoo, którą z racji wspomagania procesu generowania grafiki 3D
Plan wykładu Akcelerator 3D Potok graficzny Akcelerator 3D W 1996 r. opracowana została specjalna karta rozszerzeń o nazwie marketingowej Voodoo, którą z racji wspomagania procesu generowania grafiki 3D
Obrót wokół początku układu współrzędnych o kąt φ można wyrazić w postaci macierzowej następująco
 Transformacje na płaszczyźnie Przesunięcie Przesunięcie (translacja) obrazu realizowana jest przez dodanie stałej do każdej współrzędnej, co w postaci macierzowej można przedstawić równaniem y'] = [ x
Transformacje na płaszczyźnie Przesunięcie Przesunięcie (translacja) obrazu realizowana jest przez dodanie stałej do każdej współrzędnej, co w postaci macierzowej można przedstawić równaniem y'] = [ x
Wektory i macierze w OpenGL
 1 Wektory i macierze w OpenGL Filip Zawrocki Uniwersytet Mikołaja Kopernika Wydział Fizyki, Astronomii i Informatyki Stosowanej Krótkie przypomnienie wiadomości z algery liniowej Przestrzenie wektorowe
1 Wektory i macierze w OpenGL Filip Zawrocki Uniwersytet Mikołaja Kopernika Wydział Fizyki, Astronomii i Informatyki Stosowanej Krótkie przypomnienie wiadomości z algery liniowej Przestrzenie wektorowe
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU GRAFICZNE MODELOWANIE
Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU GRAFICZNE MODELOWANIE
Podstawy robotyki. Wykład II. Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska
 Podstawy robotyki Wykład II Ruch ciała sztywnego w przestrzeni euklidesowej Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Preliminaria matematyczne
Podstawy robotyki Wykład II Ruch ciała sztywnego w przestrzeni euklidesowej Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Preliminaria matematyczne
(4) (b) m. (c) (d) sin α cos α = sin 2 k = sin k sin k. cos 2 m = cos m cos m. (g) (e)(f) sin 2 x + cos 2 x = 1. (h) (f) (i)
 (b) m. (c) (d) sin α cos α = sin 2 k = sin k sin k. cos 2 m = cos m cos m. (g) (e)(f) sin 2 x + cos 2 x = 1. (h) (f) (i)") (3) (e) sin( θ) sin θ cos( θ) cos θ sin(θ + π/) cos θ cos(θ + π/) sin θ sin(θ π/) cos θ cos(θ π/) sin θ sin(θ ± π) sin θ cos(θ ± π) cos θ sin(θ ± π) sin θ cos(θ ± π) cos θ (f) cos x cos y (g) sin x sin
(3) (e) sin( θ) sin θ cos( θ) cos θ sin(θ + π/) cos θ cos(θ + π/) sin θ sin(θ π/) cos θ cos(θ π/) sin θ sin(θ ± π) sin θ cos(θ ± π) cos θ sin(θ ± π) sin θ cos(θ ± π) cos θ (f) cos x cos y (g) sin x sin
Wizualizacja 3D obiektów i systemów biomedycznych
 Wizualizacja 3D obiektów i systemów biomedycznych Krzysztof Gdawiec Instytut Informatyki Uniwersytet Śląski Co to jest wizualizacja danych? Wizualizacja danych jest rozległym obszarem nauki znajdującym
Wizualizacja 3D obiektów i systemów biomedycznych Krzysztof Gdawiec Instytut Informatyki Uniwersytet Śląski Co to jest wizualizacja danych? Wizualizacja danych jest rozległym obszarem nauki znajdującym
Karta graficzna karta rozszerzeo odpowiedzialna generowanie sygnału graficznego dla ekranu monitora. Podstawowym zadaniem karty graficznej jest
 KARTA GRAFICZNA Karta graficzna karta rozszerzeo odpowiedzialna generowanie sygnału graficznego dla ekranu monitora. Podstawowym zadaniem karty graficznej jest odbiór i przetwarzanie otrzymywanych od komputera
KARTA GRAFICZNA Karta graficzna karta rozszerzeo odpowiedzialna generowanie sygnału graficznego dla ekranu monitora. Podstawowym zadaniem karty graficznej jest odbiór i przetwarzanie otrzymywanych od komputera
Przekształcenia geometryczne w grafice komputerowej. Marek Badura
 Przekształcenia geometryczne w grafice komputerowej Marek Badura PRZEKSZTAŁCENIA GEOMETRYCZNE W GRAFICE KOMPUTEROWEJ Przedstawimy podstawowe przekształcenia geometryczne na płaszczyźnie R 2 (przestrzeń
Przekształcenia geometryczne w grafice komputerowej Marek Badura PRZEKSZTAŁCENIA GEOMETRYCZNE W GRAFICE KOMPUTEROWEJ Przedstawimy podstawowe przekształcenia geometryczne na płaszczyźnie R 2 (przestrzeń
PRZYDATNE WZORY SYMBOLE PUNKTY I LINIE
 WZORY PRZYDATNE WZORY SYMBOLE α - często używane do przedstawiania kąta Δ - oznacza "zmiana w" ε - współczynnik restytucji f(t) - funkcja f w odniesieniu do t μ - współczynnik tarcia ω - tu przedstawia
WZORY PRZYDATNE WZORY SYMBOLE α - często używane do przedstawiania kąta Δ - oznacza "zmiana w" ε - współczynnik restytucji f(t) - funkcja f w odniesieniu do t μ - współczynnik tarcia ω - tu przedstawia
Obraz jako funkcja Przekształcenia geometryczne
 Cyfrowe przetwarzanie obrazów I Obraz jako funkcja Przekształcenia geometryczne dr. inż Robert Kazała Definicja obrazu Obraz dwuwymiarowa funkcja intensywności światła f(x,y); wartość f w przestrzennych
Cyfrowe przetwarzanie obrazów I Obraz jako funkcja Przekształcenia geometryczne dr. inż Robert Kazała Definicja obrazu Obraz dwuwymiarowa funkcja intensywności światła f(x,y); wartość f w przestrzennych
KARTA KURSU. Grafika komputerowa
 KARTA KURSU Nazwa Nazwa w j. ang. Grafika komputerowa Computer graphics Kod Punktacja ECTS* 3 Koordynator dr inż. Krzysztof Wójcik Zespół dydaktyczny: dr inż. Krzysztof Wójcik dr inż. Mateusz Muchacki
KARTA KURSU Nazwa Nazwa w j. ang. Grafika komputerowa Computer graphics Kod Punktacja ECTS* 3 Koordynator dr inż. Krzysztof Wójcik Zespół dydaktyczny: dr inż. Krzysztof Wójcik dr inż. Mateusz Muchacki
Załącznik KARTA PRZEDMIOTU. KARTA PRZEDMIOTU Wydział Automatyki, Elektroniki i Informatyki, Rok akademicki: 2009/2010 KOMPUTEROWA
 1/1 Wydział Automatyki, Elektroniki i Informatyki, Rok akademicki: 2009/2010 Nazwa przedmiotu: Kierunek: Specjalność: Tryb studiów: GRAFIKA KOMPUTEROWA INFORMATYKA Kod/nr GK PRZEDMIOT OBOWIĄZKOWY DLA WSZYSTKICH
1/1 Wydział Automatyki, Elektroniki i Informatyki, Rok akademicki: 2009/2010 Nazwa przedmiotu: Kierunek: Specjalność: Tryb studiów: GRAFIKA KOMPUTEROWA INFORMATYKA Kod/nr GK PRZEDMIOT OBOWIĄZKOWY DLA WSZYSTKICH
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu. Mirosław Głowacki
 Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Zagadnienia Jak rozumiemy fotorealizm w grafice komputerowej Historyczny rozwój kart graficznych Przekształcenia
Wybrane aspekty teorii grafiki komputerowej - dążenie do wizualnego realizmu Mirosław Głowacki Zagadnienia Jak rozumiemy fotorealizm w grafice komputerowej Historyczny rozwój kart graficznych Przekształcenia
Karty graficzne możemy podzielić na:
 KARTY GRAFICZNE Karta graficzna karta rozszerzeo odpowiedzialna generowanie sygnału graficznego dla ekranu monitora. Podstawowym zadaniem karty graficznej jest odbiór i przetwarzanie otrzymywanych od komputera
KARTY GRAFICZNE Karta graficzna karta rozszerzeo odpowiedzialna generowanie sygnału graficznego dla ekranu monitora. Podstawowym zadaniem karty graficznej jest odbiór i przetwarzanie otrzymywanych od komputera
Wykład 5. Rendering (2) Geometria
 Geometria") Wykład 5. Rendering (2) Geometria 1. Z ogólnego, niezależnego od implementacji punktu widzenia, dane stanowiące opis geometrii modelu zorganizowane są w skończoną sekwencję (lub grupę sekwencji), którego
Wykład 5. Rendering (2) Geometria 1. Z ogólnego, niezależnego od implementacji punktu widzenia, dane stanowiące opis geometrii modelu zorganizowane są w skończoną sekwencję (lub grupę sekwencji), którego
1. Prymitywy graficzne
 1. Prymitywy graficzne Prymitywy graficzne są elementarnymi obiektami jakie potrafi bezpośrednio rysować, określony system graficzny (DirectX, OpenGL itp.) są to: punkty, listy linii, serie linii, listy
1. Prymitywy graficzne Prymitywy graficzne są elementarnymi obiektami jakie potrafi bezpośrednio rysować, określony system graficzny (DirectX, OpenGL itp.) są to: punkty, listy linii, serie linii, listy
Animowana grafika 3D. Opracowanie: J. Kęsik.
 Animowana grafika 3D Opracowanie: J. Kęsik kesik@cs.pollub.pl Rzutowanie Równoległe Perspektywiczne Rzutowanie równoległe Rzutowanie równoległe jest powszechnie używane w rysunku technicznym - umożliwienie
Animowana grafika 3D Opracowanie: J. Kęsik kesik@cs.pollub.pl Rzutowanie Równoległe Perspektywiczne Rzutowanie równoległe Rzutowanie równoległe jest powszechnie używane w rysunku technicznym - umożliwienie
2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I
![2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I](/thumbs/88/115575416.jpg "2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I") Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Programowanie gier komputerowych Tomasz Martyn Wykład 6. Materiały informacje podstawowe
 Programowanie gier komputerowych Tomasz Martyn Wykład 6. Materiały informacje podstawowe Czym są tekstury? Tekstury są tablicowymi strukturami danych o wymiarze od 1 do 3, których elementami są tzw. teksele.
Programowanie gier komputerowych Tomasz Martyn Wykład 6. Materiały informacje podstawowe Czym są tekstury? Tekstury są tablicowymi strukturami danych o wymiarze od 1 do 3, których elementami są tzw. teksele.
Ćwiczenia nr 4. TEMATYKA: Rzutowanie
 TEMATYKA: Rzutowanie Ćwiczenia nr 4 DEFINICJE: Rzut na prostą: rzutem na prostą l (zwaną rzutnią) w kierunku rzutowania k (k l) nazywamy przekształcenie płaszczyzny przyporządkowujące: a) Punktom prostej
TEMATYKA: Rzutowanie Ćwiczenia nr 4 DEFINICJE: Rzut na prostą: rzutem na prostą l (zwaną rzutnią) w kierunku rzutowania k (k l) nazywamy przekształcenie płaszczyzny przyporządkowujące: a) Punktom prostej
Temat: Transformacje 3D
 Instrukcja laboratoryjna 11 Grafika komputerowa 3D Temat: Transformacje 3D Przygotował: dr inż. Grzegorz Łukawski, mgr inż. Maciej Lasota, mgr inż. Tomasz Michno 1 Wstęp teoretyczny Bardzo często programując
Instrukcja laboratoryjna 11 Grafika komputerowa 3D Temat: Transformacje 3D Przygotował: dr inż. Grzegorz Łukawski, mgr inż. Maciej Lasota, mgr inż. Tomasz Michno 1 Wstęp teoretyczny Bardzo często programując
Architektura Procesorów Graficznych
 Architektura Procesorów Graficznych Referat: Rendering 3D: potok 3D, możliwości wsparcia sprzętowego, możliwości przyspieszenia obliczeń. Grupa wyrównawcza Cezary Sosnowski 1. Renderowanie Renderowanie
Architektura Procesorów Graficznych Referat: Rendering 3D: potok 3D, możliwości wsparcia sprzętowego, możliwości przyspieszenia obliczeń. Grupa wyrównawcza Cezary Sosnowski 1. Renderowanie Renderowanie
GRAFIKA CZASU RZECZYWISTEGO Wprowadzenie do OpenGL
 GRAFIKA CZASU RZECZYWISTEGO Wprowadzenie do OpenGL Grafika komputerowa i wizualizacja, Bioinformatyka S1, II Rok OpenGL Open Graphics Library Jest to API pozwalające na renderowanie grafiki w czasie rzeczywistym,
GRAFIKA CZASU RZECZYWISTEGO Wprowadzenie do OpenGL Grafika komputerowa i wizualizacja, Bioinformatyka S1, II Rok OpenGL Open Graphics Library Jest to API pozwalające na renderowanie grafiki w czasie rzeczywistym,
Lista nr 1 - Liczby zespolone
 Lista nr - Liczby zespolone Zadanie. Obliczyć: a) ( 3 i) 3 ( 6 i ) 8 c) (+ 3i) 8 (i ) 6 + 3 i + e) f*) g) ( 3 i ) 77 ( ( 3 i + ) 3i 3i h) ( + 3i) 5 ( i) 0 i) i ( 3 i ) 4 ) +... + ( 3 i ) 0 Zadanie. Przedstawić
Lista nr - Liczby zespolone Zadanie. Obliczyć: a) ( 3 i) 3 ( 6 i ) 8 c) (+ 3i) 8 (i ) 6 + 3 i + e) f*) g) ( 3 i ) 77 ( ( 3 i + ) 3i 3i h) ( + 3i) 5 ( i) 0 i) i ( 3 i ) 4 ) +... + ( 3 i ) 0 Zadanie. Przedstawić
Przekształcenia geometryczne. Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej
 Przekształcenia geometryczne Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej Akademia Górniczo Hutnicza w Krakowie Przekształcenia elementarne w przestrzeni D Punkty p w E na płaszczyźnie
Przekształcenia geometryczne Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej Akademia Górniczo Hutnicza w Krakowie Przekształcenia elementarne w przestrzeni D Punkty p w E na płaszczyźnie
Programy CAD Modelowanie geometryczne
 Programy CAD Modelowanie geometryczne Komputerowo wspomagane projektowanie CAD Narzędzia i techniki wspomagające prace w zakresie: projektowania, modelowania geometrycznego, obliczeniowej analizy FEM,
Programy CAD Modelowanie geometryczne Komputerowo wspomagane projektowanie CAD Narzędzia i techniki wspomagające prace w zakresie: projektowania, modelowania geometrycznego, obliczeniowej analizy FEM,
Programy CAD Modelowanie geometryczne
 Programy CAD Modelowanie geometryczne Komputerowo wspomagane projektowanie CAD Narzędzia i techniki wspomagające prace w zakresie: projektowania, modelowania geometrycznego, obliczeniowej analizy FEM,
Programy CAD Modelowanie geometryczne Komputerowo wspomagane projektowanie CAD Narzędzia i techniki wspomagające prace w zakresie: projektowania, modelowania geometrycznego, obliczeniowej analizy FEM,
Scena 3D. Cieniowanie (ang. Shading) Scena 3D - Materia" Obliczenie koloru powierzchni (ang. Lighting)
 Scena 3D - Materia Obliczenie koloru powierzchni (ang. Lighting)") Zbiór trójwymiarowych danych wej$ciowych wykorzystywanych do wygenerowania obrazu wyj$ciowego 2D. Cieniowanie (ang. Shading) Rados"aw Mantiuk Wydzia" Informatyki Zachodniopomorski Uniwersytet Technologiczny
Zbiór trójwymiarowych danych wej$ciowych wykorzystywanych do wygenerowania obrazu wyj$ciowego 2D. Cieniowanie (ang. Shading) Rados"aw Mantiuk Wydzia" Informatyki Zachodniopomorski Uniwersytet Technologiczny
3. PŁASKI STAN NAPRĘŻENIA I ODKSZTAŁCENIA
 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA 1 3. 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA Analizując płaski stan naprężenia posługujemy się składowymi tensora naprężenia w postaci wektora {,,y } (3.1) Za dodatnie
3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA 1 3. 3. PŁASKI STAN NAPRĘŻNIA I ODKSZTAŁCNIA Analizując płaski stan naprężenia posługujemy się składowymi tensora naprężenia w postaci wektora {,,y } (3.1) Za dodatnie
ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ. 1. Ciała
 ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ WSHE, O/K-CE 1. Ciała Definicja 1. Układ { ; 0, 1; +, } złożony ze zbioru, dwóch wyróżnionych elementów 0, 1 oraz dwóch działań +:, : nazywamy ciałem
ALGEBRA LINIOWA Z ELEMENTAMI GEOMETRII ANALITYCZNEJ WSHE, O/K-CE 1. Ciała Definicja 1. Układ { ; 0, 1; +, } złożony ze zbioru, dwóch wyróżnionych elementów 0, 1 oraz dwóch działań +:, : nazywamy ciałem
Programowanie Procesorów Graficznych
 Programowanie Procesorów Graficznych Wykład 1 9.10.2012 Prehistoria Zadaniem karty graficznej było sterowanie sygnałem do monitora tak aby wyświetlić obraz zgodnie z zawartościa pamięci. Programiści pracowali
Programowanie Procesorów Graficznych Wykład 1 9.10.2012 Prehistoria Zadaniem karty graficznej było sterowanie sygnałem do monitora tak aby wyświetlić obraz zgodnie z zawartościa pamięci. Programiści pracowali
Zad. 6: Sterowanie robotem mobilnym
 Zad. 6: Sterowanie robotem mobilnym 1 Cel ćwiczenia Utrwalenie umiejętności modelowania kluczowych dla danego problemu pojęć. Tworzenie diagramu klas, czynności oraz przypadków użycia. Wykorzystanie dziedziczenia
Zad. 6: Sterowanie robotem mobilnym 1 Cel ćwiczenia Utrwalenie umiejętności modelowania kluczowych dla danego problemu pojęć. Tworzenie diagramu klas, czynności oraz przypadków użycia. Wykorzystanie dziedziczenia
Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2012/2013. Forma studiów: Stacjonarne Kod kierunku: 11.
 Państwowa Wyższa Szko la Zawodowa w Nowym Sa czu Karta przedmiotu Instytut Techniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2012/2013 Kierunek studiów: Informatyka Profil: Ogólnoakademicki
Państwowa Wyższa Szko la Zawodowa w Nowym Sa czu Karta przedmiotu Instytut Techniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2012/2013 Kierunek studiów: Informatyka Profil: Ogólnoakademicki
GRAFIKA KOMPUTEROWA. Plan wykładu. 1. Początki grafiki komputerowej. 2. Grafika komputerowa a dziedziny pokrewne. 3. Omówienie programu przedmiotu
 GRAFIKA KOMPUTEROWA 1. Układ przedmiotu semestr VI - 20000 semestr VII - 00200 Dr inż. Jacek Jarnicki Instytut Cybernetyki Technicznej p. 226 C-C 3, tel. 320-28-2323 jacek@ict.pwr.wroc.pl www.zsk.ict.pwr.wroc.pl
GRAFIKA KOMPUTEROWA 1. Układ przedmiotu semestr VI - 20000 semestr VII - 00200 Dr inż. Jacek Jarnicki Instytut Cybernetyki Technicznej p. 226 C-C 3, tel. 320-28-2323 jacek@ict.pwr.wroc.pl www.zsk.ict.pwr.wroc.pl
Andrzej Marciniak GRAFIKA KOMPUTEROWA. Wykłady dla studentów kierunku informatyka Państwowej Wyższej Szkoły Zawodowej w Kaliszu
 Andrzej Marciniak GRAFIKA KOMPUTEROWA Wykłady dla studentów kierunku informatyka Państwowej Wyższej Szkoły Zawodowej w Kaliszu Wykłady są przeznaczone wyłącznie do indywidualnego użytku przez studentów
Andrzej Marciniak GRAFIKA KOMPUTEROWA Wykłady dla studentów kierunku informatyka Państwowej Wyższej Szkoły Zawodowej w Kaliszu Wykłady są przeznaczone wyłącznie do indywidualnego użytku przez studentów
Bartosz Bazyluk OpenGL Współczesne podejście do programowania grafiki Część II: Programy cieniujące (shadery)
") OpenGL Współczesne podejście do programowania grafiki Część II: Programy cieniujące (shadery) Programowanie Gier Komputerowych, Informatyka S, III Rok PLAN WYKŁADU Transformacje geometryczne Pożegnanie
OpenGL Współczesne podejście do programowania grafiki Część II: Programy cieniujące (shadery) Programowanie Gier Komputerowych, Informatyka S, III Rok PLAN WYKŁADU Transformacje geometryczne Pożegnanie
Grafika Komputerowa, Informatyka, I Rok
 SYNTEZA GRAFIKI 3D Grafika realistyczna i czasu rzeczywistego. Wstęp do programowania grafiki 3D z użyciem OpenGL. Transformacje geometryczne. Grafika Komputerowa, Informatyka, I Rok Synteza grafiki 3D
SYNTEZA GRAFIKI 3D Grafika realistyczna i czasu rzeczywistego. Wstęp do programowania grafiki 3D z użyciem OpenGL. Transformacje geometryczne. Grafika Komputerowa, Informatyka, I Rok Synteza grafiki 3D
Algebra linowa w pigułce
 Algebra Algebra linowa w pigułce Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045 Gdańsk Algebra p. 1 Algebra
Algebra Algebra linowa w pigułce Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045 Gdańsk Algebra p. 1 Algebra
0. OpenGL ma układ współrzędnych taki, że oś y jest skierowana (względem monitora) a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do
 a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do") 0. OpenGL ma układ współrzędnych taki, że oś y jest skierowana (względem monitora) a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do obserwatora f) w kierunku od obserwatora 1. Obrót dookoła osi
0. OpenGL ma układ współrzędnych taki, że oś y jest skierowana (względem monitora) a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do obserwatora f) w kierunku od obserwatora 1. Obrót dookoła osi
OpenGL i wprowadzenie do programowania gier
 OpenGL i wprowadzenie do programowania gier Wojciech Sterna Bartosz Chodorowski OpenGL i wprowadzenie do programowania gier Autorstwo rozdziałów: 1, 2, 3, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14 Wojciech Sterna
OpenGL i wprowadzenie do programowania gier Wojciech Sterna Bartosz Chodorowski OpenGL i wprowadzenie do programowania gier Autorstwo rozdziałów: 1, 2, 3, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14 Wojciech Sterna
Autodesk 3D Studio MAX Animacja komputerowa i praca kamery
 Autodesk 3D Studio MAX Animacja komputerowa i praca kamery dr inż. Andrzej Czajkowski Instyt Sterowania i Systemów Informatycznych Wydział Informatyki, Elektrotechniki i Automatyki 5 maja 2017 1 / 22 Plan
Autodesk 3D Studio MAX Animacja komputerowa i praca kamery dr inż. Andrzej Czajkowski Instyt Sterowania i Systemów Informatycznych Wydział Informatyki, Elektrotechniki i Automatyki 5 maja 2017 1 / 22 Plan
Gry Komputerowe Interaktywna kamera FPP
 Gry Komputerowe Interaktywna kamera FPP Michał Chwesiuk Zachodniopomorski Uniwersytet Technologiczny w Szczecinie Wydział Informatyki 28 Marzec 2018 Michał Chwesiuk Laboratorium 2 28 Marzec 2018 1/ 11
Gry Komputerowe Interaktywna kamera FPP Michał Chwesiuk Zachodniopomorski Uniwersytet Technologiczny w Szczecinie Wydział Informatyki 28 Marzec 2018 Michał Chwesiuk Laboratorium 2 28 Marzec 2018 1/ 11
Modelowanie i wizualizowanie 3W-grafiki. Transformacje. Aleksander Denisiuk. denisjuk@matman.uwm.edu.pl
 Modelowanie i wizualizowanie 3W-grafiki Transformacje Aleksander Denisiuk denisjuk@matman.uwm.edu.pl Uniwersytet Warmińsko-Mazurski w Olsztynie Wydział Matematyki i Informatyki ul. Słoneczna 54 10-561
Modelowanie i wizualizowanie 3W-grafiki Transformacje Aleksander Denisiuk denisjuk@matman.uwm.edu.pl Uniwersytet Warmińsko-Mazurski w Olsztynie Wydział Matematyki i Informatyki ul. Słoneczna 54 10-561
SYNTEZA OBRAZU. Wprowadzenie. Synteza obrazu
 SYNTEZA OBRAZU Wprowadzenie Synteza obrazu Synteza obrazu Zagadnienie wchodzące w skład ogólnie pojętej grafiki komputerowej. Synteza obrazu - tworzenie obrazu na podstawie pewnego opisu. Komputerowa (cyfrowa)
SYNTEZA OBRAZU Wprowadzenie Synteza obrazu Synteza obrazu Zagadnienie wchodzące w skład ogólnie pojętej grafiki komputerowej. Synteza obrazu - tworzenie obrazu na podstawie pewnego opisu. Komputerowa (cyfrowa)
Z ostatniego wzoru i zależności (3.20) można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne
 można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne") 46 III. Przekształcenia w przestrzeni trójwymiarowej Z ostatniego wzoru i zależności (3.20) można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne Złożone obiekty trójwymiarowe można uważać,
46 III. Przekształcenia w przestrzeni trójwymiarowej Z ostatniego wzoru i zależności (3.20) można obliczyć n6. Otrzymujemy (3.23) 3.5. Transformacje geometryczne Złożone obiekty trójwymiarowe można uważać,
Grafika Komputerowa Wykład 5. Potok Renderowania Oświetlenie. mgr inż. Michał Chwesiuk 1/38
 Wykład 5 Potok Renderowania Oświetlenie mgr inż. 1/38 Podejście śledzenia promieni (ang. ray tracing) stosuje się w grafice realistycznej. Śledzone są promienie przechodzące przez piksele obrazu wynikowego
Wykład 5 Potok Renderowania Oświetlenie mgr inż. 1/38 Podejście śledzenia promieni (ang. ray tracing) stosuje się w grafice realistycznej. Śledzone są promienie przechodzące przez piksele obrazu wynikowego
Opis efektów kształcenia dla modułu zajęć
 Nazwa modułu: Grafika komputerowa Rok akademicki: 2015/2016 Kod: ITE-1-514-s Punkty ECTS: 5 Wydział: Informatyki, Elektroniki i Telekomunikacji Kierunek: Teleinformatyka Specjalność: - Poziom studiów:
Nazwa modułu: Grafika komputerowa Rok akademicki: 2015/2016 Kod: ITE-1-514-s Punkty ECTS: 5 Wydział: Informatyki, Elektroniki i Telekomunikacji Kierunek: Teleinformatyka Specjalność: - Poziom studiów:
PLPILA02-IPMIBM-I-5s6-2012MKwPM-S
 Załącznik nr 1 do PROCEDURY 1.11. WYKONANIE YLABUU DO PRZEDMIOTU UJĘTEGO W PROGRAMIE KZTAŁCENIA w Państwowej Wyższej zkole Zawodowej im. tanisława taszica w Pile od przedmiotu: 1. INFORMACJE O PRZEDMIOCIE
Załącznik nr 1 do PROCEDURY 1.11. WYKONANIE YLABUU DO PRZEDMIOTU UJĘTEGO W PROGRAMIE KZTAŁCENIA w Państwowej Wyższej zkole Zawodowej im. tanisława taszica w Pile od przedmiotu: 1. INFORMACJE O PRZEDMIOCIE
ALGORYTM STATYCZNEJ ANALIZY MES DLA KRATOWNICY
 ALGORYTM STATYCZNEJ ANALIZY MES DLA RATOWNICY Piotr Pluciński e-mail: p.plucinski@l5.pk.edu.pl Jerzy Pamin e-mail: jpamin@l5.pk.edu.pl Instytut Technologii Informatycznych w Inżynierii Lądowej Wydział
ALGORYTM STATYCZNEJ ANALIZY MES DLA RATOWNICY Piotr Pluciński e-mail: p.plucinski@l5.pk.edu.pl Jerzy Pamin e-mail: jpamin@l5.pk.edu.pl Instytut Technologii Informatycznych w Inżynierii Lądowej Wydział
Bartosz Bazyluk Wprowadzenie Organizacja i tematyka zajęć, warunki zaliczenia.
 Wprowadzenie Organizacja i tematyka zajęć, warunki zaliczenia http://bazyluk.net/dydaktyka Grafika Komputerowa i Wizualizacja, Informatyka S1, II Rok O MNIE mgr inż. Pokój 322/WI2 lub 316/WI2 bbazyluk@wi.zut.edu.pl
Wprowadzenie Organizacja i tematyka zajęć, warunki zaliczenia http://bazyluk.net/dydaktyka Grafika Komputerowa i Wizualizacja, Informatyka S1, II Rok O MNIE mgr inż. Pokój 322/WI2 lub 316/WI2 bbazyluk@wi.zut.edu.pl
Rok akademicki: 2017/2018 Kod: JFM s Punkty ECTS: 7. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Grafika komputerowa 1 Rok akademicki: 2017/2018 Kod: JFM-1-507-s Punkty ECTS: 7 Wydział: Fizyki i Informatyki Stosowanej Kierunek: Fizyka Medyczna Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Grafika komputerowa 1 Rok akademicki: 2017/2018 Kod: JFM-1-507-s Punkty ECTS: 7 Wydział: Fizyki i Informatyki Stosowanej Kierunek: Fizyka Medyczna Specjalność: Poziom studiów: Studia I stopnia
Układy równań liniowych, macierze, Google
 Układ równań linowych { x+2y = 6, 3x y = 4 (0) Spotkania z Matematyka Układy równań liniowych, macierze, Google Aleksander Denisiuk denisjuk@matman.uwm.edu.pl Uniwersytet Warmińsko-Mazurski w Olsztynie
Układ równań linowych { x+2y = 6, 3x y = 4 (0) Spotkania z Matematyka Układy równań liniowych, macierze, Google Aleksander Denisiuk denisjuk@matman.uwm.edu.pl Uniwersytet Warmińsko-Mazurski w Olsztynie
SYLABUS/KARTA PRZEDMIOTU
 PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA W GŁOGOWIE SYLABUS/KARTA PRZEDMIOTU. NAZWA PRZEDMIOTU Metody przetwarzania danych graficznych. NAZWA JEDNOSTKI PROWADZĄCEJ PRZEDMIOT Instytut Politechniczny. STUDIA kierunek
PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA W GŁOGOWIE SYLABUS/KARTA PRZEDMIOTU. NAZWA PRZEDMIOTU Metody przetwarzania danych graficznych. NAZWA JEDNOSTKI PROWADZĄCEJ PRZEDMIOT Instytut Politechniczny. STUDIA kierunek
Wprowadzenie do QT OpenGL
 Wprowadzenie do QT mgr inż. Michał Chwesiuk mgr inż. Tomasz Sergej inż. Patryk Piotrowski 1/21 - Open Graphics Library Open Graphics Library API pozwalające na wykorzystanie akceleracji sprzętowej do renderowania
Wprowadzenie do QT mgr inż. Michał Chwesiuk mgr inż. Tomasz Sergej inż. Patryk Piotrowski 1/21 - Open Graphics Library Open Graphics Library API pozwalające na wykorzystanie akceleracji sprzętowej do renderowania
Przykładowe zadania na egzamin z matematyki - dr Anita Tlałka - 1
 Przykładowe zadania na egzamin z matematyki - dr Anita Tlałka - 1 Zadania rozwiązywane na wykładzie Zadania rozwiązywane na ćwiczeniach Przy rozwiązywaniu zadań najistotniejsze jest wykazanie się rozumieniem
Przykładowe zadania na egzamin z matematyki - dr Anita Tlałka - 1 Zadania rozwiązywane na wykładzie Zadania rozwiązywane na ćwiczeniach Przy rozwiązywaniu zadań najistotniejsze jest wykazanie się rozumieniem
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium GRAFIKA KOMPUTEROWA Computer Graphics Forma studiów: studia
Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium GRAFIKA KOMPUTEROWA Computer Graphics Forma studiów: studia
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: obowiązkowy na specjalności: Inżynieria oprogramowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: obowiązkowy na specjalności: Inżynieria oprogramowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Przestrzenie liniowe
 ALGEBRA LINIOWA 2 Wydział Mechaniczny / AIR, MTR Semestr letni 2009/2010 Prowadzący: dr Teresa Jurlewicz Przestrzenie liniowe Uwaga. W nawiasach kwadratowych podane są numery zadań znajdujących się w podręczniku
ALGEBRA LINIOWA 2 Wydział Mechaniczny / AIR, MTR Semestr letni 2009/2010 Prowadzący: dr Teresa Jurlewicz Przestrzenie liniowe Uwaga. W nawiasach kwadratowych podane są numery zadań znajdujących się w podręczniku
Aby przygotować się do kolokwiów oraz do egzaminów należy ponownie przeanalizować zadania
 Chemia Budowlana - Wydział Chemiczny - 1 Aby przygotować się do kolokwiów oraz do egzaminów należy ponownie przeanalizować zadania rozwiązywane na wykładzie, rozwiązywane na ćwiczeniach, oraz samodzielnie
Chemia Budowlana - Wydział Chemiczny - 1 Aby przygotować się do kolokwiów oraz do egzaminów należy ponownie przeanalizować zadania rozwiązywane na wykładzie, rozwiązywane na ćwiczeniach, oraz samodzielnie
Techniki animacji komputerowej
 Techniki animacji komputerowej 1 Animacja filmowa Pojęcie animacji pochodzi od ożywiania i ruchu. Animować oznacza dawać czemuś życie. Słowem animacja określa się czasami film animowany jako taki. Animacja
Techniki animacji komputerowej 1 Animacja filmowa Pojęcie animacji pochodzi od ożywiania i ruchu. Animować oznacza dawać czemuś życie. Słowem animacja określa się czasami film animowany jako taki. Animacja
Lista 6. Kamil Matuszewski 13 kwietnia D n =
 Lista 6 Kamil Matuszewski 3 kwietnia 6 3 4 5 6 7 8 9 Zadanie Mamy Pokaż, że det(d n ) = n.... D n =.... Dowód. Okej. Dla n =, n = trywialne. Załóżmy, że dla n jest ok, sprawdzę dla n. Aby to zrobić skorzystam
Lista 6 Kamil Matuszewski 3 kwietnia 6 3 4 5 6 7 8 9 Zadanie Mamy Pokaż, że det(d n ) = n.... D n =.... Dowód. Okej. Dla n =, n = trywialne. Załóżmy, że dla n jest ok, sprawdzę dla n. Aby to zrobić skorzystam
Grafika 2D. Animacja Zmiany Kształtu. opracowanie: Jacek Kęsik
 Grafika 2D Animacja Zmiany Kształtu opracowanie: Jacek Kęsik Wykład przedstawia podstawy animacji zmiany kształtu - morfingu Animacja zmiany kształtu Podstawowe pojęcia Zlewanie (Dissolving / cross-dissolving)
Grafika 2D Animacja Zmiany Kształtu opracowanie: Jacek Kęsik Wykład przedstawia podstawy animacji zmiany kształtu - morfingu Animacja zmiany kształtu Podstawowe pojęcia Zlewanie (Dissolving / cross-dissolving)
D l. D p. Rodzaje baz jezdnych robotów mobilnych
 ERO Elementy robotyki 1 Rodzaje baz jezdnych robotów mobilnych Napęd różnicowy dwa niezależnie napędzane koła jednej osi, dla zachowania równowagi dodane jest trzecie koło bierne (lub dwa bierne koła)
ERO Elementy robotyki 1 Rodzaje baz jezdnych robotów mobilnych Napęd różnicowy dwa niezależnie napędzane koła jednej osi, dla zachowania równowagi dodane jest trzecie koło bierne (lub dwa bierne koła)
Synteza i obróbka obrazu. Modelowanie obiektów 3D
 Synteza i obróbka obrazu Modelowanie obiektów 3D Grafika 2D a 3D W obu przypadkach efekt jest taki sam: rastrowy obraz 2D. W grafice 2D od początku operujemy tylko w dwóch wymiarach, przekształcając obraz
Synteza i obróbka obrazu Modelowanie obiektów 3D Grafika 2D a 3D W obu przypadkach efekt jest taki sam: rastrowy obraz 2D. W grafice 2D od początku operujemy tylko w dwóch wymiarach, przekształcając obraz
GRUPA 1 (Szczegółowa specyfikacja w Załączniku nr 8.1)
") Formularz cenowy oferowanego sprzętu Załącznik nr 7 do SIWZ nr TA/ZP-8/2010 GRUPA 1 (Szczegółowa specyfikacja w Załączniku nr 8.1) Stacje robocze wysokiej wydajności, przeznaczone do obliczeń numerycznych
Formularz cenowy oferowanego sprzętu Załącznik nr 7 do SIWZ nr TA/ZP-8/2010 GRUPA 1 (Szczegółowa specyfikacja w Załączniku nr 8.1) Stacje robocze wysokiej wydajności, przeznaczone do obliczeń numerycznych
Autodesk 3D Studio MAX Teksturowanie modeli 3D
 Autodesk 3D Studio MAX Teksturowanie modeli 3D dr inż. Andrzej Czajkowski Instyt Sterowania i Systemów Informatycznych Wydział Informatyki, Elektrotechniki i Automatyki 25 kwietnia 2017 1 / 20 Plan Wykładu
Autodesk 3D Studio MAX Teksturowanie modeli 3D dr inż. Andrzej Czajkowski Instyt Sterowania i Systemów Informatycznych Wydział Informatyki, Elektrotechniki i Automatyki 25 kwietnia 2017 1 / 20 Plan Wykładu
Zaawansowane systemy programowania grafiki. Wprowadzenie. Podstawy OpenGL
 Zaawansowane systemy programowania grafiki. Wprowadzenie. Podstawy OpenGL Aleksander Denisiuk Uniwersytet Warmińsko-Mazurski Olsztyn, ul. Słoneczna 54 denisjuk@matman.uwm.edu.pl 7 października 2014 1 /
Zaawansowane systemy programowania grafiki. Wprowadzenie. Podstawy OpenGL Aleksander Denisiuk Uniwersytet Warmińsko-Mazurski Olsztyn, ul. Słoneczna 54 denisjuk@matman.uwm.edu.pl 7 października 2014 1 /
Graficzny edytor cieniowania
 Politechnika Warszawska Wydział Elektroniki i Technik Informacyjnych Instytut Systemów Elektronicznych Praca dyplomowa magisterska Graficzny edytor cieniowania Shading Editor Kamil Trzciński Nr albumu:
Politechnika Warszawska Wydział Elektroniki i Technik Informacyjnych Instytut Systemów Elektronicznych Praca dyplomowa magisterska Graficzny edytor cieniowania Shading Editor Kamil Trzciński Nr albumu:
dr inż. Jacek Dąbrowski, KSG
 dr inż. Jacek Dąbrowski, KSG jacek.dabrowski@eti.pg.gda.pl Technologie PHIGS, Iris GL OpenGL, DirectX, OpenGL OpenGL OpenGL ES WebGL OpenCL OGL 1.0: 1992 DirectX:1995, GLIDE: 1996 OGL 1.1-1.5: 1997-2002
dr inż. Jacek Dąbrowski, KSG jacek.dabrowski@eti.pg.gda.pl Technologie PHIGS, Iris GL OpenGL, DirectX, OpenGL OpenGL OpenGL ES WebGL OpenCL OGL 1.0: 1992 DirectX:1995, GLIDE: 1996 OGL 1.1-1.5: 1997-2002
GRAFIKA KOMPUTEROWA. Rozwiązania sprzętowe i programowe. Przyspieszanie sprzętowe. Synteza i obróbka obrazu
 Synteza i obróbka obrazu GRAFIKA KOMPUTEROWA Rozwiązania sprzętowe i programowe Przyspieszanie sprzętowe Generowanie obrazu 3D wymaga złożonych obliczeń, szczególnie jeżeli chodzi o generowanie płynnej
Synteza i obróbka obrazu GRAFIKA KOMPUTEROWA Rozwiązania sprzętowe i programowe Przyspieszanie sprzętowe Generowanie obrazu 3D wymaga złożonych obliczeń, szczególnie jeżeli chodzi o generowanie płynnej
Wstęp do grafiki komputerowej i geometrii obliczeniowej. Jakub Maksymiuk
 Wstęp do grafiki komputerowej i geometrii obliczeniowej Jakub Maksymiuk Przekształcenia geometryczne w 2D 1 Przekształcenia geometryczne Przekształcenia na płaszczyźnie Translacje Skalowanie względem (0,
Wstęp do grafiki komputerowej i geometrii obliczeniowej Jakub Maksymiuk Przekształcenia geometryczne w 2D 1 Przekształcenia geometryczne Przekształcenia na płaszczyźnie Translacje Skalowanie względem (0,
Grafika 3D i multimedia
 Grafika 3D i multimedia Specjalność "Multimedia" jest odpowiedzią na stale zwiększający się popyt na specjalistów w zakresie projektowania i realizacji projektów multimedialnych. Multimedia przenikają
Grafika 3D i multimedia Specjalność "Multimedia" jest odpowiedzią na stale zwiększający się popyt na specjalistów w zakresie projektowania i realizacji projektów multimedialnych. Multimedia przenikają
Transformacje. dr Radosław Matusik. radmat
 www.math.uni.lodz.pl/ radmat Cel wykładu Celem wykładu jest prezentacja m.in. przestrzeni modelu, świata, kamery oraz projekcji, a także omówienie sposobów oświetlania i cieniowania obiektów. Pierwsze
www.math.uni.lodz.pl/ radmat Cel wykładu Celem wykładu jest prezentacja m.in. przestrzeni modelu, świata, kamery oraz projekcji, a także omówienie sposobów oświetlania i cieniowania obiektów. Pierwsze
AUTORKA: ELŻBIETA SZUMIŃSKA NAUCZYCIELKA ZESPOŁU SZKÓŁ OGÓLNOKSZTAŁCĄCYCH SCHOLASTICUS W ŁODZI ZNANE RÓWNANIA PROSTEJ NA PŁASZCZYŹNIE I W PRZESTRZENI
 UTORK: ELŻBIET SZUMIŃSK NUCZYCIELK ZESPOŁU SZKÓŁ OGÓLNOKSZTŁCĄCYCH SCHOLSTICUS W ŁODZI ZNNE RÓWNNI PROSTEJ N PŁSZCZYŹNIE I W PRZESTRZENI SPIS TREŚCI: PROST N PŁSZCZYŻNIE Str 1. Równanie kierunkowe prostej
UTORK: ELŻBIET SZUMIŃSK NUCZYCIELK ZESPOŁU SZKÓŁ OGÓLNOKSZTŁCĄCYCH SCHOLSTICUS W ŁODZI ZNNE RÓWNNI PROSTEJ N PŁSZCZYŹNIE I W PRZESTRZENI SPIS TREŚCI: PROST N PŁSZCZYŻNIE Str 1. Równanie kierunkowe prostej
SYSTEMY PROJEKCJI STEREOSKOPOWEJ W ANIMACJACH KOMPUTEROWYCH. Techniki projekcji Generowanie wizyjnego sygnału stereoskopowego Instalacje mobilne
 SYSTEMY PROJEKCJI STEREOSKOPOWEJ W ANIMACJACH KOMPUTEROWYCH Techniki projekcji Generowanie wizyjnego sygnału stereoskopowego Instalacje mobilne Projekcja stereoskopowa Zasada działania systemu projekcji
SYSTEMY PROJEKCJI STEREOSKOPOWEJ W ANIMACJACH KOMPUTEROWYCH Techniki projekcji Generowanie wizyjnego sygnału stereoskopowego Instalacje mobilne Projekcja stereoskopowa Zasada działania systemu projekcji
Programowanie dynamiczne i modele rekurencyjne w ekonomii Wykład 2
 Programowanie dynamiczne i modele rekurencyjne w ekonomii Wykład Michał Ramsza października Streszczenie Wykład drugi bazuje głównie na [, roz 6 5, [, roz oraz [ Materiał obejmuje zagadnienie zwiazane
Programowanie dynamiczne i modele rekurencyjne w ekonomii Wykład Michał Ramsza października Streszczenie Wykład drugi bazuje głównie na [, roz 6 5, [, roz oraz [ Materiał obejmuje zagadnienie zwiazane
Blok III: Funkcje elementarne. e) y = 1 3 x. f) y = x. g) y = 2x. h) y = 3x. c) y = 3x + 2. d) y = x 3. c) y = x. d) y = x.
 y = 1 3 x. f) y = x. g) y = 2x. h) y = 3x. c) y = 3x + 2. d) y = x 3. c) y = x. d) y = x.") Blok III: Funkcje elementarne III. Narysuj wykres funkcji: a) y = x y = x y = x y = x III. Narysuj wykres funkcji: a) y = x + y = 4 x III. Znajdź miejsca zerowe funkcji: a) y = 6 x y = x e) y = x f) y
Blok III: Funkcje elementarne III. Narysuj wykres funkcji: a) y = x y = x y = x y = x III. Narysuj wykres funkcji: a) y = x + y = 4 x III. Znajdź miejsca zerowe funkcji: a) y = 6 x y = x e) y = x f) y
Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015. Forma studiów: Stacjonarne Kod kierunku: 11.
 Państwowa Wyższa Szko la Zawodowa w Nowym Sa czu Karta przedmiotu Instytut Techniczny obowiązuje studentów rozpoczynających studia w roku akademickim 201/201 Kierunek studiów: Informatyka Profil: Ogólnoakademicki
Państwowa Wyższa Szko la Zawodowa w Nowym Sa czu Karta przedmiotu Instytut Techniczny obowiązuje studentów rozpoczynających studia w roku akademickim 201/201 Kierunek studiów: Informatyka Profil: Ogólnoakademicki